
遊技機
【課題】演出時に、可動体を破損させることなく可動させる。
【解決手段】演出制御CPU92は、演出時において可動演出ユニット100のステッピングモータ103を連続して正転させる場合に許容される最大のステップ数を設定する最大可動ステップ数設定処理を実行する。最大可動ステップ数設定処理において、演出制御CPU92は、RAM94に記憶されているデフォルトステップ数分ステッピングモータ103を正転させるパルス信号を出力して、可動役物120を第1位置から第2位置まで往動させる。次に、ステッピングモータ103を逆転させるパルス信号を出力して、可動役物120を第2位置から第1位置へ復動させる。演出制御CPU92は、復動時にステッピングモータ103へ出力したパルス信号のパルス数を、最大可動ステップ数としてRAM94に記憶する。
【解決手段】演出制御CPU92は、演出時において可動演出ユニット100のステッピングモータ103を連続して正転させる場合に許容される最大のステップ数を設定する最大可動ステップ数設定処理を実行する。最大可動ステップ数設定処理において、演出制御CPU92は、RAM94に記憶されているデフォルトステップ数分ステッピングモータ103を正転させるパルス信号を出力して、可動役物120を第1位置から第2位置まで往動させる。次に、ステッピングモータ103を逆転させるパルス信号を出力して、可動役物120を第2位置から第1位置へ復動させる。演出制御CPU92は、復動時にステッピングモータ103へ出力したパルス信号のパルス数を、最大可動ステップ数としてRAM94に記憶する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遊技ホールなどの遊技場に設置される遊技機に関する。
【背景技術】
【0002】
特許文献1には、複数の可動体を動作させて行う可動体演出を実行する統括CPUを備えたパチンコ遊技機が記載されている。このパチンコ遊技機には、遊技盤の遊技領域のほぼ中央に、表示枠体が装着されている。表示枠体は、遊技盤の前面側から当該遊技盤に装着される前面側部材と、遊技盤の後面側から当該遊技盤に装着される裏面側部材とから構成されている。表示枠体の略中央には、正面視横長矩形に開口するセット口が形成されている。裏面側部材においてセット口の上辺部には、上下方向に往復動作する上可動体が配設されている。上可動体は、裏面側部材に上下方向に往復動作可能に支持された上ベース部材から右方に向かって延びる支持部の自由端部に取着されている。上ベース部材の左側辺には、ピニオンが噛合されているラックが形成され、ピニオンは裏面側部材に固定された駆動手段としての上モータ(ステッピングモータ)の回転軸に接続されている。統括CPUは、可動体演出の実行時に、駆動信号を上モータに出力して回転駆動(右回転)を開始させ、上可動体を、上可動体が最も上方に位置する初期位置から最も下方に位置する最大移動位置へ移動させ、また、上モータを回転駆動させてからの経過時間が所定時間に達する迄の間に、駆動信号を上モータに出力して回転駆動(左回転)させて、最大移動位置から初期位置へ移動させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−259458号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のパチンコ遊技機のように遊技の演出時に可動体を所定の経路に沿って所定の第1位置と所定の第2位置との間を往復動させる遊技機には、ステッピングモータの駆動を制御し、所定の第1位置から所定の第2位置に往動するように、ステッピングモータを一方向に所定のステップ数分駆動して、可動体を所定の第2位置まで往動させた後、ステッピングモータを他方向に駆動して可動体を第1位置に復動させる制御部を有するものがある。また、所定の経路の往動方向側の端部に、可動体に接触して、可動体の往動を停止させるストッパーを設けているものがある。
【0005】
しかし、上記制御部及び上記ストッパーを採用した特許文献1のパチンコ遊技機において、可動体の形状のばらつきや組み付け誤差があると、制御部がステッピングモータを所定のステップ数分駆動したときの可動体の移動位置が一定とならない。可動体の上記移動位置が所定の第2位置よりも往動方向側に位置していた場合、制御部は、ステッピングモータを所定のステップ数分駆動して可動体を往動させる度に、所定のステップ数分の駆動を完了する前に、可動体を所定の第2位置を越えて往動させてストッパーに接触させ、また、ストッパーに接触後も可動体を往動させようとすることを繰り返すことで、可動体が破損してしまう可能性がある。
【0006】
本発明は、上記実状に鑑みてなされたものであり、演出時に、可動体を破損させることなく可動させる遊技機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の遊技機は、可動体と、ステッピングモータと、第1の判定手段と、第2の判定手段と、第1の駆動制御手段と、ステップ数計測手段と、可動ステップ数記憶手段と、第2の駆動制御手段と、を備える。
【0008】
可動体は、第1位置と第2位置とを含む所定の経路に沿って往復移動可能に遊技機本体に支持される。ステッピングモータは、ステップ数による回転制御が可能であり、可動体に連結されて可動体を駆動する。第1の判定手段は、可動体が第1位置にあるか否かを判定する。第2の判定手段は、可動体が第2位置にあるか否かを判定する。第1の駆動制御手段は、ステッピングモータの駆動を制御して、可動体が第1位置にあると第1の判定手段が判定してから、可動体が第2位置にあると第2の判定手段が判定するまで、可動体を所定の経路に沿って往動させ、且つ、可動体が第2位置にあると第2の判定手段が判定してから、可動体が第1位置にあると第1の判定手段が判定するまで、可動体を所定の経路に沿って復動させる。ステップ数計測手段は、第1の駆動制御手段の制御によって可動体が往動又は復動するときのステッピングモータのステップ数をカウントする。可動ステップ数記憶手段は、ステップ数計測手段が計測したステップ数以下のステップ数を可動ステップ数として記憶する。第2の駆動制御手段は、遊技中にステッピングモータの駆動を制御して、可動体が第1位置にあるとき、ステッピングモータを可動ステップ数分駆動させ、可動体を所定の経路に沿って往動させて可動体による演出を行う。
【0009】
上記構成では、ストッパーを所定の経路上の往動方向の端部に設けた場合であっても、第2の駆動制御手段は、遊技中に可動体による演出を行う際に、第2位置を越えて可動体を往動させないので、可動体をストッパーに接触させない、又は、可動体がストッパーに接触後、可動体を往動させようとしない。このため、可動体の破損を防止することができる。
【0010】
また、上記遊技機は、インデックスと、デフォルトステップ数記憶手段と、を備えてもよい。インデックスは、可動体に設けられて可動体と一体的に可動する。デフォルトステップ数記憶手段は、デフォルトステップ数が予め記憶されている。また、第1の判定手段は、遊技機本体に固定され、第1位置における可動体の前記インデックスを検知することによって可動体が第1位置にあると判定するインデックス検知手段であってもよい。第2の判定手段は、インデックス検知手段がインデックスを検知している状態から第1の駆動制御手段によってステッピングモータがデフォルトステップ数分駆動されて可動体が所定の経路に沿って往動したときに可動体が第2位置にあると判定してもよい。ステップ数計測手段は、第1の駆動制御手段の制御によって可動体が復動するときのステッピングモータのステップ数をカウントしてもよい。
【0011】
上記構成では、ステップ数計測手段は、第1の駆動制御手段の制御によって可動体が復動するときのステッピングモータのステップ数をカウントする。したがって、例えば、ストッパーを所定の経路上の往動方向の端部に設け、且つ、第1の駆動制御手段がステッピングモータを所定のステップ数分駆動して可動体を往動させる際、所定のステップ数分の駆動を完了する前に、可動体がストッパーに接触してしまう場合であっても、演出時においては、第2の駆動制御手段は、第1の駆動制御手段によって可動体が復動するときのステッピングモータのステップ数以下のステップ数を可動ステップ数として、ステッピングモータを駆動させて可動体を往動させるので、第2駆動手段は、可動体をストッパーに接触させない、又は、可動体がストッパーに接触後、可動体を往動させようとしない。このため、可動体の破損を防止することができる。
【0012】
上記遊技機は、第3の判定手段を備えてもよい。第3の判定手段は、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値以上であるか否かを判定する。また、可動ステップ数記憶手段は、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値以上であると第3の判定手段が判定したときは、ステップ数計測手段がカウントしたステップ数以下のステップ数を可動ステップ数として記憶し、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値未満であると第3の判定手段が判定したときはデフォルトステップ数を可動ステップ数として記憶してもよい。
【0013】
上記構成では、可動体の形状のばらつきや組み付け誤差などの程度が比較的大きく、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値以上である場合に、可動体ステップ数記憶手段は、ステップ数計測手段がカウントしたステップ数以下のステップ数を可動ステップ数として記憶することができる。
【発明の効果】
【0014】
本発明によれば、演出時に、可動体を破損させることなく可動させることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態例に係るパチンコ機の外観斜視図である。
【図2】図1のパチンコ機のガラス扉及び前面ボードを開放した斜視図である。
【図3】図1のパチンコ機の背面図である。
【図4】図2のパチンコ機の統合表示ユニットの拡大正面図である。
【図5】図2のパチンコ機の可動演出ユニットの拡大斜視図である。
【図6】図5の可動演出ユニットの要部分解斜視図である。
【図7】図5の可動演出ユニットの装飾部及び上ケースを除いた図である。
【図8】図7の可動演出ユニットを上方から視た図である。
【図9】図1のパチンコ機の電気的構成を示すブロック図である。
【図10】第1の実施形態の最大可動ステップ数設定処理を示すフローチャートである。
【図11】第2の実施形態の図7の可動演出ユニットを上方から視た図である。
【図12】第2の実施形態の最大可動ステップ数設定処理を示すフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の説明において、左右方向は遊技機を前方(遊技者側)から視た左右方向に対応している。
【0017】
図1に示すパチンコ遊技機(以下、「パチンコ機」と略称する)Pは、遊技球を遊技媒体として用いるものであり、遊技者は、遊技場運営者から遊技球を借り受けてパチンコ機Pによる遊技を行う。なお、パチンコ機Pにおける遊技において、遊技球はその1個1個が遊技価値を有した媒体であり、遊技の成果として遊技者が享受する特典(利益)は、例えば遊技者が獲得した遊技球の数に基づいて遊技価値に換算することができる。以下、図1〜図8を参照して遊技機の構成について説明する。
【0018】
[遊技機の全体構成]
図1〜図3に示すように、パチンコ機Pは、機枠(外枠)1と内枠扉(前面枠)2とガラス扉3と遊技盤5とを備える。機枠1は、縦長矩形状の木製枠体であり、遊技場内の島設備(図示省略)に対して締結固定される。内枠扉2は、機枠1に開閉自在に取り付けられ、ガラス扉3は、内枠扉2に開閉自在に取り付けられる。内枠扉2及びガラス扉3の開閉軸は、パチンコ機Pの一側(図1中の左側)の端縁に沿って上下方向に延びる。
【0019】
遊技盤5は、内枠扉2の内側に収容され、内枠扉2に対して着脱可能に固定される。ガラス扉3の中央部には、縦長円形状の開口窓6が形成され、開口窓6には、遊技盤5の前方を覆う透明なガラス板7が取り付けられる。遊技盤5の前面(盤面)は、遊技者が開口窓6を介して前方から視認可能な遊技領域8を含み、ガラス扉3が閉じられると、ガラス板7の内面(後面)と遊技領域8との間に遊技球が流下可能な空間が形成される。
【0020】
内枠扉2の一側(図1中の右側)の縁部には、シリンダ錠9が設けられている。機枠1に対して内枠扉2及びガラス扉3を閉じてシリンダ錠9を施錠すると、機枠1に対する内枠扉2及びガラス扉3の開放が禁止される。
【0021】
ガラス扉3は、その下部に前面ボード4を一体的に有し、前面ボード4には、前方へ突出する上皿10と下皿11とが設けられる。上皿10は前面ボード4の上部に配置され、下皿11は上皿10の下方に配置される。上皿10には、遊技者に貸し出された遊技球(貸球)や入賞により獲得した遊技球(賞球)が貯留され、下皿11には、上皿10が満杯の状態でさらに払い出された遊技球が貯留される。なお、本実施形態のパチンコ機PはいわゆるCR機(CRユニット50(図9に示す)に接続される機種)であり、遊技者が借り受けた遊技球は、賞球とは別に上皿10に払い出される。
【0022】
前面ボード4の上面には、貸出操作部15と演出ボタン23とが設けられている。貸出操作部15は、球貸スイッチ12と返却スイッチ13と度数表示装置14と球貸表示装置24とを有し、遊技者がCRユニット50(図9に示す)に有価媒体(例えば磁気記録媒体や記憶IC内蔵媒体等)を投入して球貸スイッチ12を操作すると、予め決められた度数単位(例えば500円分に相当する5度数)に対応する個数(例えば125個)分の遊技球が貸し出され、球貸表示装置24に、貸出処理中であることが表示される。度数表示装置14には、CRユニット50に投入されている有価媒体の残存度数が表示される。なお、本実施形態ではCR機を例に挙げているが、パチンコ機Pは、CR機以外の機種(CRユニット50に接続されない機種)であってもよい。また、演出ボタン23は、演出に関する遊技者からの操作を受け付ける。
【0023】
前面ボード4の前面には、上皿球抜き操作部16と下皿球抜き操作部17とが設けられている。上皿球抜き操作部16が操作されると、上皿10の遊技球が下皿11へ流下し、下皿球抜き操作部17が操作されると、下皿11の遊技球が下方へ落下して排出される。下皿11から排出された遊技球は、例えば球受け箱(図示省略)等に受け止められる。
【0024】
前面ボード4の右下部には、発射ハンドル18が回転自在に支持され、内枠扉2の下部には、発射装置19が取り付けられている。上皿1の遊技球は発射装置19に1個ずつ供給され、遊技者が発射ハンドル18を回転操作すると、発射装置19(発射モータ86(図9に示す))が作動し、遊技領域8に向かって遊技球が発射される。遊技領域8は、ガイドレール20及び遊技球規制レール21によって略円形状に区画形成され、発射装置19から発射された遊技球は、レール20,21に沿って滑走して遊技領域8に左上方から進入し、遊技釘や風車等に誘導及び案内されて流下する。
【0025】
ガラス扉3の上部と内枠扉2の下部とには、スピーカ22がそれぞれ取り付けられ、ガラス扉3の前面には、複数の枠体ランプ25が取り付けられている。スピーカ22は、遊技に関する様々な効果音を発する。枠体ランプ25は、例えば内蔵するLEDの発光(点灯や点滅、輝度階調の変化、色調の変化等)により演出を実行する。
【0026】
[盤面の構成]
遊技領域8内には、統合表示ユニット30、演出表示装置31、スルーチャッカ32、電動チューリップ(普通電動役物)33、ステージ34、第1始動入賞口(第1特図始動入賞口)35、第2始動入賞口(第2特図始動入賞口)36、一般入賞口37、アウト口38、アタッカー装置(特別電動役物)39、可動演出ユニット100、複数の盤面ランプ60、遊技釘(図示省略)、及び風車(図示省略)等が設けられている。第1始動入賞口35と第2始動入賞口36とは上下方向に間隔を空けて配置されている。盤面ランプ60は、例えば内蔵するLEDの発光(点灯や点滅、輝度階調の変化、色調の変化等)により演出を実行する。
【0027】
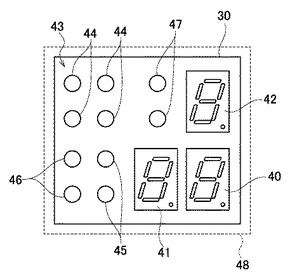
統合表示ユニット30は、演出表示装置31を視認している遊技者の視界に同時に入らないように、遊技盤3の右下部分に配置されている。図4に示すように、統合表示ユニット30は、第1特図表示装置(第1特別図柄表示装置)40と、第2特図表示装置(第2特別図柄表示装置)41と、普図表示装置(普通図柄表示装置)42と、状態表示装置43とを備え、これらの表示装置40〜43は、1つの統合表示基板48に実装された状態で遊技盤5に取り付けられる。
【0028】
第1特図表示装置40は、第1始動入賞口35への遊技球の入賞を契機に行われた第1特別図柄に係る電子抽選の結果を、第1特別図柄(数字や絵柄)を変動させた後に停止表示するものである。第2特図表示装置41は、第2始動入賞口36への遊技球の入賞を契機に行われた第2特別図柄に係る電子抽選の結果を、第2特別図柄(数字や絵柄)を変動させた後に停止表示するものである。本実施形態の第1特図表示装置40及び第2特図表示装置41は、7セグメントLEDによって第1特別図柄及び第2特別図柄を変動後に停止表示する。なお、本実施形態では、第2始動入賞口36への入賞に基づく遊技の方が第1始動入賞口35への入賞に基づく遊技よりも優先して実行される。また、第1特別図柄と第2特別図柄とが同時に変動することはない。
【0029】
普通図柄表示装置42は、スルーチャッカ32の遊技球の通過を契機に行われた普通図柄に係る電子抽選の結果を、普通図柄(数字や絵柄)を変動させた後に停止表示するものである。本実施形態の普通図柄表示装置42は、7セグメントLEDによって普通図柄を変動後に停止表示する。
【0030】
状態表示装置43は、ラウンド数表示部44、第1特図保留数表示部45、第2特図保留数表示部46、及び普図保留数表示部47を有する。ラウンド数表示部44は、4つのランプ(LED)から構成され、ランプの消灯、点灯又は点滅の組合せによって、特別図柄に係る電子抽選の結果に基づいて遊技者に提供される大当たり遊技のラウンド数(本実施形態では、上記電子抽選の結果に基づいて15ラウンド又は2ラウンドの大当たり遊技が提供される)を表示する。第1特図保留数表示部45は、第1始動入賞口35に遊技球が入賞し、当該入賞に応じて取得された第1特図当たり決定乱数(大当たり決定乱数)が第1特図保留乱数としてRAM75の第1特図保留乱数記憶領域(図示省略)に記憶されると、その記憶数を現在の保留数として表示する。第2特図保留数表示部46は、第2始動入賞口36に遊技球が入賞し、当該入賞に応じて取得された第2特図当たり決定乱数(大当たり決定乱数)が第2特図保留乱数としてRAM75の第2特図保留乱数記憶領域(図示省略)に記憶されると、その記憶数を現在の保留数として表示する。普図保留数表示部47は、スルーチャッカ32を遊技球が通過し、当該通過に応じて取得された普図当たり決定乱数(当たり決定乱数)が普図保留乱数としてRAM75の普図保留乱数記憶領域(図示省略)に記憶されると、その記憶数を現在の保留数として表示する。これらの保留数表示部45,46,47は、それぞれランプ(LED)から構成され、ランプの消灯、点灯又は点滅の組合せによって「0」個〜「4」個(保留球乱数の記憶数の上限)の間で保留数を表示する。
【0031】
図2に示すように、演出表示装置31は、液晶の画像表示器を有し、遊技盤3の略中央部に設けられ、第1始動入賞口35及び第2始動入賞口36への遊技球の入賞を契機に行われた特別図柄に係る電子抽選の結果に基づいて所定の演出画像を表示する。演出画像には、第1特図表示装置40及び第2特図表示装置41に変動表示される第1特別図柄及び第2特別図柄と同期をとって変動するダミー図柄(演出図柄)と、第1特図当たり決定乱数の保留数表示と、第2特図当たり決定乱数の保留数表示とが含まれる。また、演出表示装置31は、遊技が行われていない待機状態では遊技の内容を紹介する動画などのデモンストレーション映像(デモ画面)を表示する。
【0032】
電動チューリップ33は、1対の羽根部材49と電動チューリップ駆動装置51(図9に示す)とを備える。1対の羽根部材49は、遊技盤3との直交軸を中心に回転自在であり、第2始動入賞口36の入口の左右に配置される。電動チューリップ駆動装置51のソレノイド(図示省略)が通電されると、1対の羽根部材が互いに離れる方向に回転し、電動チューリップ33が開口して、第2始動入賞口36の入口が拡大される。電動チューリップ33が閉じた状態(通常状態)では、第2始動入賞口36に遊技球は入賞できず、第2始動入賞口36への入賞は、電動チューリップ33の開口時に制限される。
【0033】
ステージ34は、遊技球が転動しながら一時的に滞在する構造物であり、演出表示装置31の下方に配置される。ステージ34の略中央の真下に第1始動入賞口35が配され、ステージ34の中央部分から落下した遊技球は、高い確率で第1始動入賞口35へと導かれる。
【0034】
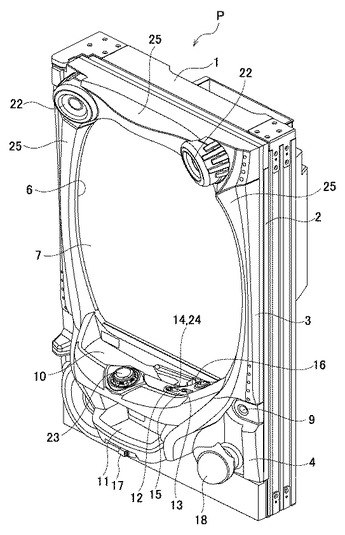
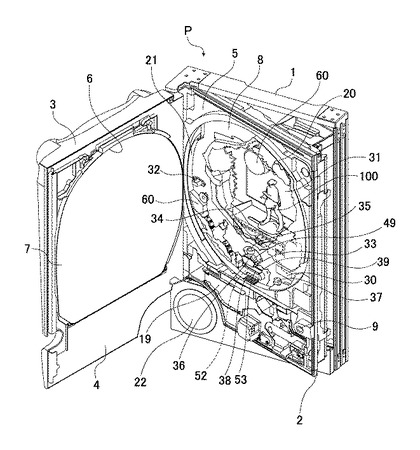
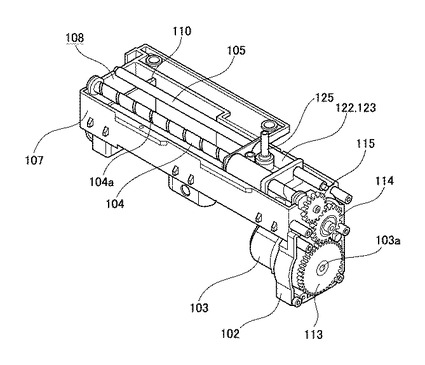
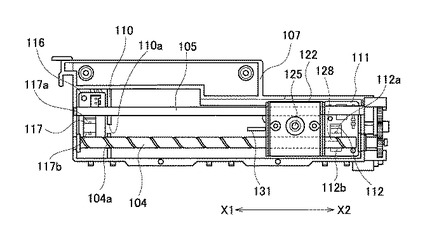
可動演出ユニット100は演出表示装置の前方に配設されており、ステージの右側に隣接している。図5〜図8に示すように、可動演出ユニット100は、可動役物(可動体)120と、ケース101と、ギアボックス102と、ステッピングモータ103と、スクリューシャフト104と、ガイドシャフト105と、を有する。
【0035】
ケース101は、上面を開口する有底細長形状の下ケース107と、下ケース107の上部開口端を塞ぐ上ケース106と、がスナップ結合によって一体化されて構成されている。ケース101は、内側に収容空間108を区画する。下ケース107と上ケース106の短辺側の接合面にはスクリューシャフト104とガイドシャフト105の各両端が回転可能に支承されており、これらスクリューシャフト104とガイドシャフト105は前後方向に所定の間隔で離間して、収容空間108内で左右方向に平行に延びている。上ケース106には左右方向に延びる横長矩形状の挿通孔109が形成されており、この挿通孔109はスクリューシャフト104とガイドシャフト105の間に位置して両者と平行に延びている。
【0036】
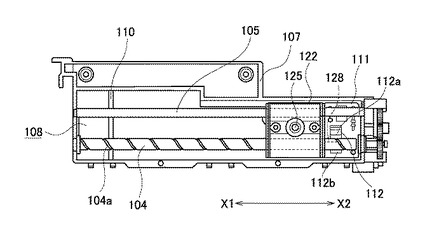
下ケース107の左端部近傍の内底面にはストッパー110が立設されており、このストッパー110はスクリューシャフト104とガイドシャフト105の下方位置で両者と直交する方向へ平板状に延びている。ストッパー110は、可動役物120が図5及び図8に示すX1方向に移動して最も左側に位置するときに、後述する可動体120の台座部122の左側面に接触して、可動役物120のX1方向への移動を規制する。下ケース107の内底面の右側には回路基板111が搭載されており、この回路基板111上には発光部112aと受光部112bとを備えるフォトインタラプタからなる右側インデックス検知センサ(第1の判定手段、インデックス検知手段)112が実装されている。
【0037】
また、下ケース107の右側面にはギアボックス102がねじ止めされており、下ケース107の下方に配置されたステッピングモータ103がギアボックス102の左側面に固定されている。ステッピングモータ103の回転軸103a(図7参照)は、後述するサブ制御装置72から所定の正転のための励磁パターン又は逆転のための励磁パターンに従って出力されるパルス信号を1パルス受信する毎に1ステップずつ正転(パチンコ機Pの左側から視て時計回りに回転)又は逆転(同側から視て反時計回りに回転)する。ステッピングモータ103の回転軸103aは、正逆いずれかの方向に連続して200ステップ駆動することによって1回転する。すなわち、1ステップにつき1.8度(基本ステップ角)回転する。ステッピングモータ103の回転軸103aにはギア113が取り付けられており、このギア113は中継ギア114を介してスクリューシャフト104の一端に取り付けられたギア115に噛合している。各ギア113,114,115はギアボックス102の内部に収納されており、回転軸103aが正逆いずれかの方向へ回転すると、その回転が各ギア113,114,115を介してスクリューシャフト104に伝達されるようになっている。
【0038】
可動役物120は、装飾部121と、台座部122と、によって構成され、装飾部121及び台座部122は、合成樹脂材料などによって形成されている。装飾部121は、銃を手にした人物を模して形成されている。台座部122は、上側台座部123、下側台座部124及び筒状部125によって構成されている。上側台座部123及び下側台座部124は、スクリューシャフト104とガイドシャフト105を上下方向から挟んでねじ止めすることにより一体化されている。
【0039】
下側台座部124の略中央部には下側嵌合孔126が形成されており、下側台座部124の上面には下側嵌合孔126を挟んで前後に並んで左右方向に平行に延びる一対のガイド溝127が形成されている。また、下側台座部124の右側面には右方に突出し、左右方向に所定の幅を有する平板状の右側インデックス(インデックス)128が形成されている。右側インデックス128は、可動役物120が所定の位置にあるときに、右側インデックス検知センサ112の発光部112aと受光部112bとの間に介在する。右側インデックス検知センサ112は、発光部112aと受光部112bとの間に右側インデックス128が介在するとき、右側インデックス検知信号を後述するサブ制御装置72に出力する。
【0040】
上側台座部123の略中央部には、下側嵌合孔126と連通する上側嵌合孔129が形成されており、上側台座部123の下面には上側嵌合孔129を挟んで前後に並んで左右方向に平行に延びる一対のU字状溝130が形成されている。筒状部125は、上下方向に延び、下部が、連通した下側嵌合孔126と上側嵌合孔129とに挿通して嵌合し、下側台座部124及び上側台座部123に固定される。また、筒状部125の上端部は、上ケース106の挿通孔109を挿通し、装飾部121の下端部に設けられた嵌合孔(図示省略)に嵌合する。これにより、装飾部121、筒状部125及び台座部122は、一体化されている。
【0041】
スクリューシャフト104は上側台座部123の前方のU字状溝130と下側台座部124の前方のガイド溝127とで画成される円筒状孔に挿通されており、この円筒状孔の内部でU字状溝130の内周面に突設された係合部(図示省略)がスクリューシャフト104の外周面に刻設された螺旋状溝104aと係合している。また、ガイドシャフト105は上側台座部123の後方のU字状溝130と下側台座部124の後方のガイド溝127とで画成される円筒状孔に挿通されている。したがって、ステッピングモータ103を駆動源としてスクリューシャフト104が回転すると、可動役物120は、ガイドシャフト105に案内されながらスクリューシャフト104の軸線に沿った所定の経路上を水平方向(図5及び図8のX1−X2方向)に往復動可能となっている。具体的には、ステッピングモータ103の回転軸103aが正転したときは、X1方向に移動(往動)し、回転軸103aが逆転したときは、X2方向に移動(復動)する。
【0042】
アタッカー装置39は、第1始動入賞口35及び第2始動入賞口36に遊技球が入賞することを契機に行われる特別図柄に係る電子抽選の結果、特図当たり(大当たり)となって大当たり遊技に移行した場合に所定回数(本実施形態では、2ラウンド又は15ラウンド)開放される装置である。アタッカー装置39は、横長矩形状の大入賞口52と横長板状の蓋部材53とアタッカー駆動装置54(図9に示す)とを備える。蓋部材53の下部は、水平な軸を中心として前後方向に開閉自在に支持され、アタッカー駆動装置54のソレノイド(図示省略)が通電されると、蓋部材53の上部が前下方へ傾動し、アタッカー装置39が開口して大入賞口52が露呈され、多量の遊技球が蓋部材53の上面(裏面)に案内されて大入賞口52へ入賞可能となる。アタッカー装置39が閉じた状態(通常状態)では、蓋部材54が大入賞口54を閉止するため、大入賞口52への入賞は、アタッカー装置39の開口時に制限される。
【0043】
各入賞口(第1始動入賞口35、第2始動入賞口36、一般入賞口37、大入賞口52)に遊技球が入賞すると、所定個数の遊技球が賞球として遊技者に払い出され、入賞した遊技球は、その入賞口35,36,37,52から遊技盤5の裏側へ回収される。また、何れの入賞口35,36,37,52にも入賞しなかった遊技球は、最終的にアウト口38から遊技盤5の裏側へ回収される。回収された遊技球は、アウト通路アセンブリ(図示省略)を通じてパチンコ機Pの裏側から枠外へ排出され、さらに島設備の補給経路(図示省略)に合流する。
【0044】
スルーチャッカ32、第1始動入賞口35、第2始動入賞口36、一般入賞口37、大入賞口52の内部には、それぞれ遊技球の通過を検知するためのセンサ(図9に示すゲート通過球検知センサ55、第1特図始動球検知センサ56、第2特図始動球検知センサ57、大入賞球検知センサ58及び一般入賞球検知センサ59)が設けられている
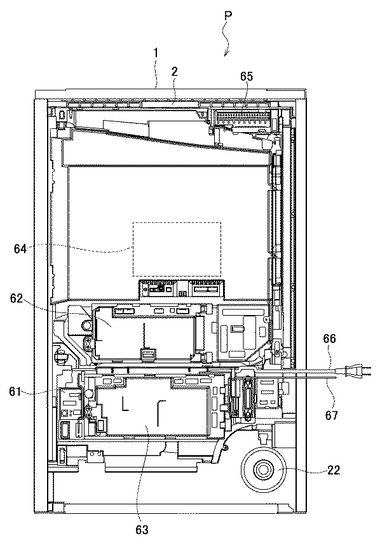
[裏側の構成]
図3に示すように、パチンコ機Pの裏側には、電源供給装置61、主制御基板ユニット62、払出制御基板ユニット63、サブ制御基板ユニット64、外部情報端子基板65、電源コード(電源プラグ)66、アース線(アース端子)67、パチンコ機Pの電源系統や制御系統を構成する各種の電子機器類(図示外の制御コンピュータを含む)等が設置されている。
【0045】
外部情報端子基板65は、パチンコ機Pを外部の電子機器(例えば、ホールコンピュータ68(図9に示す)やデータ表示装置等)に接続するためのインタフェースであり、パチンコ機Pの遊技進行状態やメンテナンス状態等を表す各種の外部情報信号(例えば賞球情報、扉開放情報、図柄確定回数情報、大当たり情報、始動口情報等)は、外部情報端子基板65から外部の電子機器に送信される。
【0046】
電源コード66は、遊技場の島設備に設置された電源装置(例えばAC24V)に接続されて、パチンコ機Pの動作に必要な電源(電力)を確保する。アース線67は、島設備に設置されたアース端子に接続され、パチンコ機Pをアース(接地)する。
【0047】
[制御に関する構成]
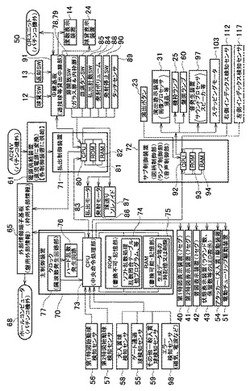
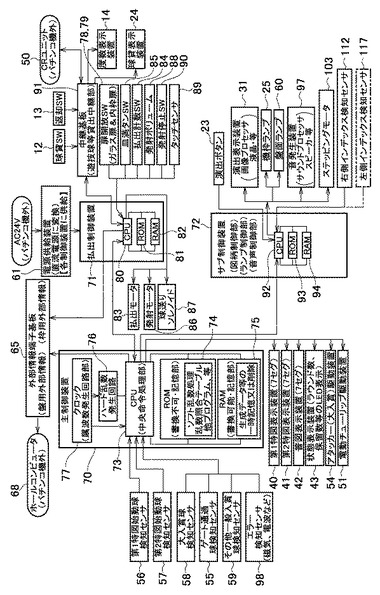
次に、パチンコ機Pの制御に関する構成について説明する。図9は、パチンコ機Pに装備された各種の電子機器類を示すブロック図である。
【0048】
パチンコ機Pは、主制御装置70と払出制御装置71とサブ制御装置72とを備える。主制御装置70は、制御動作の中枢であり、主にパチンコ機Pにおける遊技処理の実行を制御する機能を有し、主制御基板ユニット62に内蔵されている。払出制御装置71は、主に遊技球の払い出しと発射とを制御する機能を有し、払出制御基板ユニット63に内蔵されている。サブ制御装置72は、主に演出を制御する機能を有し、サブ制御基板ユニット64に内蔵されている。主制御装置70と払出制御装置71とは、双方向通信が可能なシリアル通信によって接続されている。
【0049】
(電源供給装置61)
電源供給装置61は、電源コード66を通じて島設備から外部電源(例えば、24Vの交流電源)の供給を受け、この交流電源をパチンコ機Pで使用する複数の定電圧の直流電源や粗整流の直流電源に変換し、主制御装置70、払出制御装置71、サブ制御装置72等に供給する。
【0050】
(主制御装置70)
主制御装置70には、中央演算処理装置(中央命令処理部)である主制御CPU73を実装した回路基板(主制御基板)が装備されており、主制御CPU73は、CPUコア、各種レジスタ(汎用レジスタ、フラグレジスタ、インデックスレジスタ、リフレッシュレジスタ、割込みレジスタ、命令レジスタなど)、スタックポインタ、プログラムカウンタ、命令レコーダ(何れも図示省略)等を含み、ROM74やRAM(RWM)75等の半導体メモリとともにLSIとして構成されている。各レジスタは、演算結果、次に読み込む命令のアドレス、実行状態等を保持する。また主制御装置70には、ハード乱数発生回路76やサンプリング回路(図示省略)が装備されている。ハード乱数発生回路76は、ハードウェア乱数(例えば10進数表記で0〜65535)を発生させるものであり、発生させた乱数は、サンプリング回路を通じて主制御CPU73に入力される。ハードウェア乱数は、大当たり判定用の第1特図当たり決定乱数及び第2特図当たり決定乱数や、当たり(普図当たり)判定用の普図当たり決定乱数として用いられる。主制御装置70には、クロック(周波数発生回路部)77、入出力(I/O)ポート、カウンタ/タイマ回路(CTC)等の周辺ICが装備されており、これらは主制御CPU73とともに回路基板上に実装されている。
【0051】
また、主制御CPU73は、周期的(例えば4ミリ秒毎)に入力される割り込み信号に基づいてループカウンタの値を所定の範囲で1ずつ更新させることによりソフトウェア乱数を生成するソフトウェア乱数発生手段(図示省略)としても機能する。また、主制御CPU73は、演出態様を決定するためのコマンドである変動パターンコマンドを決定し、サブ制御装置72に送信する変動パターンコマンド決定手段(図示省略)としても機能する。変動パターンコマンド決定手段は、第1特図当たり決定乱数又は第2特図当たり決定乱数と、ソフトウェア乱数発生手段が生成したソフトウェア乱数に基づいて、特別図柄に係わる電子抽選の結果に応じて予め設定されている演出のための複数の変動パターンコマンドの中から一つを選択して決定し、決定した変動パターンコマンドをサブ制御装置72に送信する。なお、予め設定されている演出のための複数の変動パターンコマンドは、それぞれ異なる演出態様に対応している。
【0052】
RAM75には、各種フラグの記憶領域を含むワーク領域(図示省略)が設けられ、割込み発生時やサブルーチンや関数を呼び出す際に、処理中のデータや戻りアドレスなどがワーク領域のスタック領域(退避領域)に一時的に退避される。また、主制御CPU73は、ROM74に記憶されている遊技制御用プログラムに従って処理を実行することにより、電源断検知手段及び実行制御手段として機能する。
球検知センサ類56〜59の入賞検知信号は、入出力ドライバ(図示省略)を介して主制御CPU73に入力される。なお、本実施形態では、第1特図始動球検知センサ56及び第2特図始動球検知センサ57からの入賞検知信号は、主制御装置70に直接送信され、ゲート通過球検知センサ55、大入賞球検知センサ58及び一般入賞球検知センサ59からの入賞検知信号は、中継端子板(図示省略)を経由して主制御装置70に送信される。
【0053】
第1特図表示装置40、第2特図表示装置41、普図表示装置42、及び状態表示装置43の各表示は、主制御CPU73からの制御信号によって制御される。主制御CPU73は、遊技の進行状況に応じてこれら表示装置40〜43に対する制御信号を出力し、各LEDの点灯状態を制御する。
【0054】
電動チューリップ駆動装置51及びアタッカー駆動装置54の駆動は、主制御CPU73からの制御信号によって制御される。各駆動装置51,54のソレノイドは、主制御CPU73からの制御信号に基づいて動作(励磁)し、電動チューリップ33及びアタッカー装置39を開閉動作(作動)させる。
【0055】
ガラス扉3にはガラス扉開放スイッチ78が設置され、内枠扉2には内枠扉開放スイッチ79が設置される。内枠扉2からガラス扉3が開放されると、ガラス扉開放スイッチ78からの接点信号が払出制御装置71を経由して主制御装置70に入力される。スイッチ78,79から接点信号を受信した主制御CPU73は、扉が開放したことを音やLEDや液晶などによって報知するため、これらの報知処理の実行を指示する制御信号をサブ制御装置72に送信する。また、スイッチ78,79から接点信号を受信した払出制御装置71は、扉開放を示す外部情報信号を出力する。
【0056】
パチンコ機Pには磁気や電波等を検知するエラー検知センサ98が設けられ、エラー検知センサ98は、磁気や電波等を検知すると、主制御装置70にエラー検知信号を送信する。エラー検知信号を受信した主制御CPU73は、所定のエラー処理を実行するとともに、エラー検知を示す外部情報信号を出力する。
【0057】
(払出制御装置71)
払出制御装置71には、払出制御CPU80を実装した回路基板(払出制御基板)が装備されており、払出制御CPU80も、主制御CPU73と同様に、CPUコア(図示省略)を含み、ROM81、RAM82等の半導体メモリとともにLSIとして構成されている。払出制御CPU80は、主制御CPU73から受信した賞球指示コマンド(払出コマンド送信信号)に基づいて遊技球の払い出し動作を制御し、指示された個数の遊技球の払出動作を実行させる。主制御CPU73は、賞球指示コマンドとともに、賞球情報信号を外部情報信号として生成し出力する。
【0058】
遊技場の球補給経路(図示省略)から補給された遊技球は、賞球タンク(図示省略)に蓄えられ、賞球樋(図示省略)を流下して賞球ケース(図示省略)に導入され、賞球ケースから上皿10に供給される。
【0059】
賞球ケースには、払出モータ(例えばステッピングモータ)83が設けられ、払出制御装置71(払出制御基板ユニット63)には、払出モータ83の駆動回路(図示省略)が設けられている。払出制御装置71は、主制御CPU73から受信した賞球指示コマンドに基づいて払出モータ83を回転駆動し、指示された数の遊技球を賞球ケースから払い出させる。払い出された遊技球は、払出流路(図示省略)を通って前面ボード4へ流下する。
【0060】
払出モータ83の下流側には払出計数スイッチ84が設置され、払出モータ83の駆動によって実際に賞球が払い出されると、払出計数スイッチ84からの計数信号が払出制御装置71に送信される。払出制御CPU80は、受信した計数信号に基づき、実際の払出数や球切れ状態を検知して、遊技球の払い出しを管理する。
【0061】
上皿10(図1に示す)への遊技球の供給経路には皿満タンスイッチ85が設置され、下皿11(図1に示す)が遊技球で満杯になると、皿満タンスイッチ85がONになり、満タン検出信号が払出制御装置71に送信される。満タン検出信号を受信した払出制御CPU80は、主制御CPU73から受信した賞球指示コマンドに応じた賞球動作を一旦保留とし、未払出の賞球残数をRAM82に記憶させておく。なお、RAM82の記憶は電源断時にもバックアップが可能であり、遊技中に停電(瞬間的な停電を含む)が発生しても、未払出の賞球残数情報が消失してしまうことはない。
【0062】
発射装置19(図2に示す)には、発射モータ86と球送りソレノイド87とが設けられ、発射ハンドル18(図1に示す)には、発射ボリューム88とタッチセンサ89と発射停止スイッチ90とが設けられている。球送りソレノイド87は、上皿10(図1に示す)から流下した遊技球を1個ずつ発射位置に送り出し、発射モータ86は、発射位置に送り出された遊技球を打ち出す。なお遊技球の発射間隔は、例えば0.6秒程度(1分間で100個以内)である。
【0063】
発射ボリューム88は、発射ハンドル18(図1に示す)の回転操作量(ストローク)に比例した発射勢指示信号を払出制御装置71に送信する。タッチセンサ89は、静電容量の変化から遊技者の身体が発射ハンドル18に触れていることを検出し、その検出信号を払出制御装置71に送信する。発射停止スイッチ90は、遊技者から操作されたときに発射停止信号(接点信号)を払出制御装置71に送信する。
【0064】
遊技者が発射ハンドル18を回転操作すると、発射ボリューム88から払出制御装置71に回転操作量に応じた発射勢指示信号が送信される。払出制御CPU80は、受信した発射勢指示信号に基づいて発射モータ86の駆動を制御する。これにより、遊技者の操作量に応じて遊技球の打ち出し強さが調整される。但し、払出制御CPU80は、タッチセンサ89からの検出信号がオフ(ローレベル)の場合、及び発射停止スイッチ90から発射停止信号が入力された場合には、発射モータ86の駆動を停止する。この他、払出制御CPU80は、パチンコ機PにCRユニット50が接続されていない場合、発射モータ86の駆動を停止する。
【0065】
球貸スイッチ12又は返却スイッチ13が操作されると、その操作信号が中継基板91を経由してCRユニット50に送信される。CRユニット50からは、有価媒体の残り度数を表す度数信号が中継基板91を経由して度数表示装置14に送信される。
【0066】
(サブ制御装置72)
サブ制御装置72には、演出制御CPU(第1の判定手段、インデックス検知手段、第2の判定手段、第1の駆動制御手段、ステップ数計測手段、第2の駆動制御手段、第3の判定手段)92を実装した回路基板(複合サブ制御基板)が装備されており、演出制御CPU92も、主制御CPU73と同様に、CPUコア(図示省略)を含み、ROM93、RAM(可動ステップ数記憶手段)94等の半導体メモリとともにLSIとして構成されている。サブ制御装置72には、入出力ドライバや各種の周辺IC(共に図示省略)が装備されている。
【0067】
サブ制御装置72のROM93には、演出の制御に関する演出制御プログラム及び複数の演出パターンが格納されており、演出制御CPU92は、格納された演出制御プログラムに従い、主制御CPU73から送信される変動パターンコマンドに基づいて、複数の演出パターンから一つの演出パターンを選択して、演出表示装置31、各種ランプ25,60、音発生装置97及び可動演出ユニット100の演出の制御を実行する。演出表示装置31は、画像プロセッサや液晶等を含み、音発生装置97は、サウンドプロセッサやスピーカ22等を含む。演出の制御には、演出表示装置31の画像の表示制御、各種ランプ25,60の発光制御、スピーカ22からの音声発生制御、及び可動演出ユニット100のステッピングモータ103の駆動制御が含まれる。なお、画像プロセッサ及びサウンドプロセッサは、サブ制御基板ユニット64に設けてもよい。
【0068】
サブ制御装置72のRAM94には、演出制御CPU92が可動演出ユニット100の駆動制御を行う際に用いられる最大可動ステップ数が記憶されている最大可動ステップ数記憶領域が設定されている。最大可動ステップ数とは、演出時における可動演出ユニット100の駆動制御において、演出制御CPU92が可動演出ユニット100のステッピングモータ103を連続して正転させる場合に許容される最大のステップ数である。パチンコ機Pの電源投入直後の初期状態における最大可動ステップ数記憶領域には、デフォルトステップ数が記憶されている。デフォルトステップ数は、パチンコ機Pの設計時のシミュレーションや量産試作時における可動役物120の形状のばらつきや組み付け誤差などがない理想的な状態の試作品の試験結果などに基づいて、予め設定されている。デフォルトステップ数は、右側インデックス検知センサ112がX2方向に復動する可動役物120の右側インデックス128の検知を開始する位置(第1位置)からデフォルトステップ数分ステッピングモータ103を正転させて可動役物120をX1方向(図5及び図8参照)に往動させたときに、可動役物120の台座部122がストッパー110の近傍で、且つ、台座部122の左側面がストッパー110に接触しない位置で停止するように設定されている。なお、本実施形態において、後述する最大可動ステップ数設定処理を実行した後に、最大可動ステップ数記憶領域に記憶されている最大可動ステップ数分ステッピングモータ103が正転したことに伴って可動役物120が第1位置から往動した位置を、最大可動位置と称する。また、RAM94には、後述する最大可動ステップ数設定処理において、演出制御CPU92がカウントしたステッピングモータ103の駆動ステップ数のカウント値を記憶するカウント値記憶領域が設定されている。上記初期状態におけるカウント値記憶領域には、カウント値として0が記憶されている。
【0069】
演出制御CPU92は、可動演出ユニット100の駆動制御において、主制御CPU73から送信される変動パターンコマンドに基づいて、ROM93に格納された複数の演出パターンから一つの演出パターンを選択し、選択した演出パターンに応じて、所定の正転のための励磁パターン又は逆転のための励磁パターンに従ってパルス信号をステッピングモータ103に出力して、ステッピングモータ103の駆動を制御し、ステッピングモータ103を正転又は逆転させ、可動役物120を往動又は復動させる。また、演出制御部CPU92は、選択した演出パターンで可動演出ユニット100を正確に制御できるように、駆動制御開始時に、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かを判定する。受信していた場合は、駆動制御を継続し、受信していなかった場合は、駆動制御を中止する。
【0070】
また、演出制御部CPU92は、駆動制御終了時に、右側インデックス検知センサ112から出力された右側インデックス検知信号の受信を開始してから、所定の押し込みステップ数分、本実施形態では2ステップ分ステッピングモータ103を逆転させるパルス信号(すなわち逆転のための励磁パターンに従って2パルスのパルス信号)を出力し、その後にステッピングモータ103の駆動を停止し、可動役物120を停止させる押し込み処理を実行する。これにより、可動役物120は、第1位置から、更に図のX2方向(右側)に移動した位置(原点位置)で停止するので、可動役物120の停止後に、外部からパチンコ機Pに伝達される振動などが原因で、可動役物120が図のX1方向(左側)に多少移動した場合であっても、右側インデックス検知センサ112が右側インデックス128を検知している状態を確実に維持することができる。
【0071】
したがって、演出制御CPU92は、可動演出ユニット100の駆動制御において、主制御CPU73から送信される変動パターンコマンドに基づいて選択した演出パターンが、可動役物120を第1位置から最大可動位置まで往動させて、その後最大可動位置から第1位置まで復動させる内容の演出パターンであった場合、押し込みステップ数の2ステップにRAM94の最大可動ステップ数記憶領域に記憶されている最大可動ステップ数を加算したステップ数分ステッピングモータ103を正転させるパルス信号を出力し、その後、ステッピングモータ103を逆転させるパルス信号を右側インデックス検知センサ112が右側インデックス128を検知するまで出力し、右側インデックス検知センサ112が右側インデックス128の検知を開始すると、上記の押し込み処理を実行して、可動役物120を原点位置で停止させ、可動演出ユニット100の駆動制御を終了する。
【0072】
また、サブ制御装置72のROM93には、最大可動ステップ数設定プログラムが格納されており、演出制御CPU92は、格納された最大可動ステップ数設定プログラムに従い、最大可動ステップ数設定処理を、遊技機の電源投入時における入出力チェックやメモリチェックなどの一連のいわゆる初期動作の一環として実行する。
【0073】
最大可動ステップ数設定処理において、演出制御CPU92は、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かに基づいて、右側インデックス検知センサ112が可動役物120の右側インデックス128を検知しているか否かを判定する。受信している場合は、右側インデックス検知センサ112が右側インデックス128を検知していると判定し、所定のステップ数分、本実施形態では10ステップ分ステッピングモータ103を正転させるパルス信号を出力する。これによって、可動役物120を、X1方向(図5及び図8参照)に、右側インデックス検知センサ112が右側インデックス128を検知しない位置まで往動させる。次に、演出制御CPU92は、右側インデックス検知センサ112から出力される右側インデックス検知信号を受信するまで、ステッピングモータ103を逆転させるパルス信号を出力し、可動役物120をX2方向に復動させる。右側インデックス検知信号を受信すると、演出制御CPU92は、可動体役物が第1位置にあると判定し、パルス信号の出力を停止する。このとき、演出制御CPU92は、上記押し込み処理を実行しない。すなわち、演出制御CPU92は、可動役物120を第1位置で停止させる。
【0074】
次に、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域を参照し、記憶されているデフォルトステップ数分、本実施形態では、400ステップ数分ステッピングモータ103を正転させるパルス信号を出力する。これによって、可動役物120は、第1位置からステッピングモータ103がデフォルトステップ数の400ステップ数分正転することに伴ってX1方向に往動する位置、すなわち本実施形態における第2位置まで往動する。演出制御CPU92は、ステッピングモータ103を400ステップ数分正転させるパルス信号の出力を終了したとき、可動役物120が第2位置にあると判定する。可動役物120が第2位置にあると判定した演出制御CPU92は、右側インデックス検知センサ112から出力される右側インデックス検知信号を受信するまで、ステッピングモータ103を逆転させるパルス信号を出力して、可動役物120を第2位置から第1位置へ復動させる。
【0075】
また、演出制御CPU92は、可動役物120を第2位置から第1位置へ復動させるときにステッピングモータ103へ出力したパルス信号のパルス数を、ステッピングモータ103の駆動ステップ数としてカウントする。具体的には、演出制御CPU92は、ステッピングモータ103にパルス信号を1パルス出力する度に、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶する。また、右側インデックス検知信号を受信すると、演出制御CPU92は、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数との差の絶対値が所定値、本実施形態では5以上であるか否かを判定する。例えば、カウントしたステップ数が395ステップで、且つ、デフォルトステップ数が400ステップの場合など、両値の差の絶対値が5以上の場合、カウントしたステップ数から所定のステップ数、本実施形態では1ステップを引いた394ステップを最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に更新して記憶し、最大可動ステップ数設定処理を終了する。一方、カウントしたステップ数が399ステップで、且つ、デフォルトステップ数が400ステップの場合など、両値の差の絶対値が5未満の場合は、上述のようにRAM94の最大可動ステップ数記憶領域の更新記憶を行わないで最大可動ステップ数設定処理を終了する。すなわち、この場合は、デフォルトステップ数の400ステップが最大可動ステップ数として最大可動ステップ数記憶領域に記憶されている状態を維持する。なお、演出制御CPU92は、最大可動ステップ数設定処理の終了時に、RAM94のカウント値記憶領域に記憶されているカウント値をクリアする。
【0076】
(外部への出力)
主制御装置70及び払出制御装置71において生成された各種の外部情報信号は、外部情報端子基板65から外部に出力される。外部情報端子基板65から出力される信号は、例えば遊技場のホールコンピュータ68で集計される。
【0077】
[最大可動ステップ数設定処理]
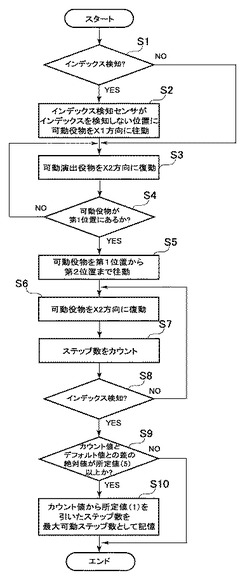
次に、サブ制御装置72の演出制御CPU92が実行する最大可動ステップ数設定処理について、図10のフローチャートを参照して説明する。
【0078】
最大可動ステップ数設定処理を開始すると、演出制御CPU92は、右側インデックス検知センサ112が可動役物120の右側インデックス128を検知しているか否かを判定する。検知している場合(ステップS1:YES)は、ステップS2に移行する。一方、検知していない場合(ステップS1:NO)は、ステップS3に移行する。
【0079】
ステップS2では、演出制御CPU92は、所定のステップ数分、本実施形態では10ステップ分ステッピングモータ103を正転させるパルス信号を出力して、可動役物120を、X1方向(図5及び図8参照)に、右側インデックス検知センサ112が右側インデックス128を検知しない位置まで往動させ、ステップS3に移行する。
【0080】
ステップS3では、演出制御CPU92は、ステッピングモータ103を1ステップ分逆転させるパルス信号を出力し、可動役物120をX2方向に復動させ、ステップS4に移行する。
【0081】
ステップS4では、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かに基づき、可動役物120が第1位置にあるか否かを判定し、第1位置にある場合(ステップS4:YES)、パルス信号の出力を停止して可動役物120を第1位置で停止させ、ステップS5に移行する。一方、第1位置にない場合(ステップS4:NO)は、ステップS3に移行する。
【0082】
ステップS5では、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域を参照し、記憶されているデフォルトステップ数分、本実施形態では、400ステップ数分ステッピングモータ103を正転させるパルス信号を出力して、可動役物120を、第1位置から第2位まで往動させ、ステップS6に移行する。
【0083】
ステップS6では、演出制御CPU92は、ステッピングモータ103を1ステップ分逆転させるパルス信号を出力し、可動役物120をX2方向に復動させ、ステップS7に移行する。
【0084】
ステップS7では、演出制御CPU92は、ステッピングモータ103へ出力したパルス数を、可動役物120を復動するときにステッピングモータ103が駆動したステップ数としてカウントし、具体的には、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶し、ステップS8に移行する。
【0085】
ステップS8では、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かに基づいて、右側インデックス検知センサ112が可動役物120の右側インデックス128を検知しているか否かを判定し、検知している場合(ステップS8:YES)は、ステップS9に移行する。一方、検知していない場合(ステップS8:NO)は、ステップS6に移行する。
【0086】
ステップS9では、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数(デフォルト値)との差の絶対値が所定値以上、本実施形態では5以上であるか否かを判定し、所定値以上の場合は、ステップS10に移行し、所定値未満の場合は、本処理を終了する。
【0087】
ステップS10では、カウントしたステップ数から所定のステップ数(所定値)、本実施形態では1ステップを引いたステップ数を最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に記憶し、本処理を終了する。
【0088】
以上説明したように、本実施形態によれば、可動役物120の形状のばらつきや組み付け誤差があり、上述のように、演出制御CPU92が、最大可動ステップ数設定処理においてカウントしたステップ数が395ステップで、且つ、デフォルトステップ数が400ステップであるような場合、すなわち、演出制御CPU92が、デフォルトステップ数分ステッピングモータ103を駆動させ、可動役物120をX2方向に往動させると、デフォルトステップ数分の駆動を完了する前に、可動役物120をストッパー110に接触させ、接触後も往動させようとしてしまうような場合(この場合、可動役物120の台座部122の弾性変形やステッピングモータ103の空回りなどが発生し、これらが繰り返し発生すると、可動役物120の破損の原因となる)であっても、遊技中の演出における可動演出ユニット100の駆動制御においては、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域に記憶されている最大可動ステップ数の394ステップ分ステッピングモータ103を駆動させ、可動役物120を最大可動位置まで往動させるので、最大可動位置の可動役物120をストッパー110に接触させない。このため、可動体の破損を防止することができる。
【0089】
また、最大可動ステップ数設定処理においてカウントしたステップ数とデフォルトステップ数との差の絶対値が5以上である場合に、カウントしたステップ数を最大可動ステップ数として記憶することができるので、可動役物120の形状のばらつきや組み付け誤差などの程度が比較的大きく、デフォルトステップ数分ステッピングモータ103を駆動させると、可動役物120が破損する可能性が高い場合に、カウントしたステップ数を最大可動ステップ数として採用することができる。
【0090】
なお、演出制御CPU92は、最大可動ステップ数設定処理においてカウントしたステップ数(上記例では395ステップ)を最大可動ステップ数として、最大可動ステップ数記憶領域に記憶してもよい。この場合、遊技中の演出における可動演出ユニット100の駆動制御においては、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域に記憶されている最大可動ステップ数の395ステップ分ステッピングモータ103を駆動させ、可動役物120を最大可動位置まで往動させるので、可動役物120は最大可動位置でストッパー110に接触して停止するが、演出制御CPU92は、接触後の可動役物120を往動させようとしないので、可動体の破損を防止することができる。
【0091】
次に、本発明の第2の実施形態について説明する。第2の実施形態では、可動演出ユニット100の下ケース107の内底面の左側に左側インデックス検知センサ117を備える回路基板116が搭載されている点、可動役物120の下側台座部124の左側面に左側インデックス131が形成されている点及び演出制御CPU92は、最大可動ステップ数設定処理において、可動役物120を第1位置から左側インデックス131を左側インデックス検知センサ117が検知するまで往動させるときに出力したパルス信号のパルス数をカウントする点が第1の実施形態とは異なる。以下の第2の実施形態において、第1の実施形態と共通する部分については、その説明を省略する。
【0092】
図11に示すように、本実施形態の可動演出ユニット100の下ケース107の端部近傍の内底面に立設されているストッパー110の略中央部には、左側インデックス131を挿通する挿通孔110aが形成されている。下ケース107の内底面の左側には回路基板116が搭載されており、この回路基板116上には発光部117aと受光部117bとを備えるフォトインタラプタからなる左側インデックス検知センサ117が実装されている。
【0093】
また、可動演出ユニット100の可動役物120の下側台座部124の左側面には左方に突出し、左右方向に所定の幅を有する平板状の左側インデックス131が形成されている。左側インデックス131は、可動役物120が所定の位置にあるときに、ストッパー110の挿通孔110aを挿通し、左側インデックス検知センサ117の発光部117aと受光部117bとの間に介在する。左側インデックス検知センサ117は、発光部117aと受光部117bとの間に左側インデックス131が介在するとき、左側インデックス検知信号をサブ制御装置72に出力する。なお、左側インデックス131の左右方向の幅は、可動役物120の台座部122の左側面がストッパー110に接触するときに、左側インデックス検知センサ117の発光部117aと受光部117bとの間に介在する長さに設定されている。
【0094】
演出制御CPU92は、本実施形態における最大可動ステップ数設定処理において、第1の実施形態と同様に、先ず可動役物120を第1位置で停止させる。
【0095】
次に、演出制御CPU92は、ステッピングモータ103を正転させるパルス信号を出力して、第1位置から可動役物120の左側インデックス131が左側インデックス検知センサ117の発光部117aと受光部117bとの間に介在する位置(本実施形態における第2位置)まで可動体を往動させる。すなわち、演出制御CPU92は、右側インデックス検知センサ112から出力される右側インデックス検知信号を受信するまで、ステッピングモータ103を正転させるパルス信号を出力する。
【0096】
また、演出制御CPU92は、可動役物120を第1位置から第2位置へ往動させるときにステッピングモータ103へ出力したパルス信号のパルス数を、ステッピングモータ103の駆動ステップ数としてカウントする。具体的には、演出制御CPU92は、ステッピングモータ103にパルス信号を1パルス出力する度に、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶する。また、左側インデックス検知信号を受信すると、演出制御CPU92は、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数との差の絶対値が所定値、例えば5以上であるか否かを判定する。例えば、カウントしたステップ数が410ステップで、且つ、デフォルトステップ数が400ステップの場合など、両値の差の絶対値が5以上の場合、カウントしたステップ数から所定のステップ数、本実施形態では1ステップを引いた409ステップを最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に更新して記憶する。両値の差の絶対値が5未満の場合、デフォルトステップ数の400ステップが最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に記憶されている状態を維持する。
【0097】
なお、演出制御CPU92は、最大可動ステップ数設定処理後に、左側インデックス検知センサ117への電源の供給を停止し、オフ状態にする。また、演出制御CPU92は、演出の制御における可動演出ユニット100の駆動制御において、主制御CPU73から送信される変動パターンコマンドに基づいて選択した演出パターンが、可動役物120を第1位置から最大可動位置まで往動させて、その後最大可動位置から第1位置まで復動させる内容の演出パターンであった場合、上記第1の実施形態と同様に押し込みステップ数に最大可動ステップ数を加算したステップ数分ステッピングモータ103を正転させるパルス信号を出力し、その後、ステッピングモータ103を逆転させるパルス信号出力する。したがって、可動演出ユニット100の駆動制御において、可動役物120を最大可動位置に往動させるとき、左側インデックス検知センサ117から出力された左側インデックス検知信号を受信しているか否かの判定に基づいて、ステッピングモータ103の駆動を停止する制御を行わず、ステッピングモータ103を最大可動ステップ数分正転させるパルス信号を出力した後、ステッピングモータ103を逆転させるパルス信号を送信する、という比較的簡単な制御で可動演出ユニット100の駆動を制御することができる。
【0098】
[最大可動ステップ数設定処理]
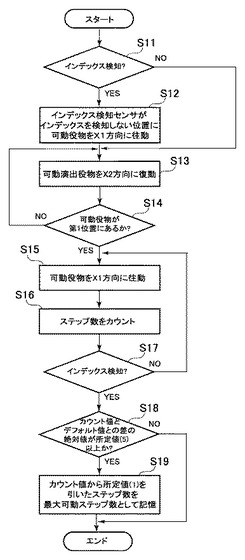
次に、本実施形態におけるサブ制御装置72の演出制御CPU92が実行する最大可動ステップ数設定処理について、図12のフローチャートを参照して説明する。なお、ステップS11〜ステップS14については、第1の実施形態における最大可動ステップ数設定処理のステップS1〜ステップS4と同様のため説明を省略する。
【0099】
ステップS15では、演出制御CPU92は、ステッピングモータ103を1ステップ分正転させるパルス信号を出力し、可動役物120をX1方向(図5及び図8参照)に往動させ、ステップS16に移行する。
【0100】
ステップS16では、演出制御CPU92は、ステッピングモータ103へ出力したパルス数を、往動するときにステッピングモータ103が駆動したステップ数としてカウントし、具体的には、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶し、ステップS17に移行する。
【0101】
ステップS17では、左側インデックス検知センサ117から出力された左側インデックス検知信号を受信しているか否かに基づいて、左側インデックス検知センサ117が可動役物120の左側インデックス131を検知しているか否かを判定し、検知している場合(ステップS17:YES)は、ステップS18に移行する。一方、検知していない場合(ステップS17:NO)は、ステップS15に移行する。
【0102】
ステップS18では、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数(デフォルト値)との差の絶対値が所定値以上、本実施形態では5以上であるか否かを判定し、所定値以上の場合は、ステップS19に移行し、所定値未満の場合は、本処理を終了する。
【0103】
ステップS19では、カウントしたステップ数から所定のステップ数(所定値)、本実施形態では1ステップを引いたステップ数を最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に記憶し、本処理を終了する。
【0104】
本実施形態によれば、演出制御CPU92によって、可動体を第1位置から第2位置に往動させるときのステッピングモータ103のステップ数を最大可動ステップ数として、RAM94の最大可動ステップ数記憶領域に記憶することができる。
【0105】
以上、本発明者によってなされた発明を適用した実施形態について説明したが、この実施形態による本発明の開示の一部をなす論述及び図面により本発明は限定されることはない。例えば、上記第1及び第2の実施形態では、演出の制御における可動演出ユニット100の駆動制御の終了時に押し込み処理を実行したが、押し込み処理は省略してもよい。
【0106】
また、上記実施形態では、演出制御CPU92が、最大可動ステップ数設定処理を初期動作の一環として実行する態様を説明したが、演出制御CPU92は、パチンコ機Pが遊技が行われていない待機状態であるときに、最大可動ステップ数設定処理を実行してもよい。また、演出制御CPU92は、遊技機の工場出荷時や、遊技ホールへの取り付け設置時に最大可動ステップ数設定処理を実行してもよい。この場合、サブ制御装置72に不揮発性のRAM(例えば、NVRAM)を装備させ、演出制御CPU92は、最大可動ステップ数設定処理においてカウントしたステップ数を不揮発性のRAMに記憶する。
【0107】
すなわち、これらの実施形態に基づいて当業者等によりなされる他の実施形態、実施例及び運用技術等は全て本発明の範疇に含まれることは勿論であることを付け加えておく。
【符号の説明】
【0108】
72:サブ制御装置、92…演出制御CPU(第1の判定手段、インデックス検知手段、第2の判定手段、第1の駆動制御手段、ステップ数計測手段、第2の駆動制御手段、第3の判定手段)、94…RAM(可動ステップ数記憶手段)、100…可動演出ユニット、103…ステッピングモータ、120…可動役物(可動体)、112…右側インデックス検知センサ(第1の判定手段、インデックス検知手段)、117…左側インデックス検知センサ、128…右側インデックス(インデックス)、P…パチンコ機(遊技機)
【技術分野】
【0001】
本発明は、遊技ホールなどの遊技場に設置される遊技機に関する。
【背景技術】
【0002】
特許文献1には、複数の可動体を動作させて行う可動体演出を実行する統括CPUを備えたパチンコ遊技機が記載されている。このパチンコ遊技機には、遊技盤の遊技領域のほぼ中央に、表示枠体が装着されている。表示枠体は、遊技盤の前面側から当該遊技盤に装着される前面側部材と、遊技盤の後面側から当該遊技盤に装着される裏面側部材とから構成されている。表示枠体の略中央には、正面視横長矩形に開口するセット口が形成されている。裏面側部材においてセット口の上辺部には、上下方向に往復動作する上可動体が配設されている。上可動体は、裏面側部材に上下方向に往復動作可能に支持された上ベース部材から右方に向かって延びる支持部の自由端部に取着されている。上ベース部材の左側辺には、ピニオンが噛合されているラックが形成され、ピニオンは裏面側部材に固定された駆動手段としての上モータ(ステッピングモータ)の回転軸に接続されている。統括CPUは、可動体演出の実行時に、駆動信号を上モータに出力して回転駆動(右回転)を開始させ、上可動体を、上可動体が最も上方に位置する初期位置から最も下方に位置する最大移動位置へ移動させ、また、上モータを回転駆動させてからの経過時間が所定時間に達する迄の間に、駆動信号を上モータに出力して回転駆動(左回転)させて、最大移動位置から初期位置へ移動させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−259458号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のパチンコ遊技機のように遊技の演出時に可動体を所定の経路に沿って所定の第1位置と所定の第2位置との間を往復動させる遊技機には、ステッピングモータの駆動を制御し、所定の第1位置から所定の第2位置に往動するように、ステッピングモータを一方向に所定のステップ数分駆動して、可動体を所定の第2位置まで往動させた後、ステッピングモータを他方向に駆動して可動体を第1位置に復動させる制御部を有するものがある。また、所定の経路の往動方向側の端部に、可動体に接触して、可動体の往動を停止させるストッパーを設けているものがある。
【0005】
しかし、上記制御部及び上記ストッパーを採用した特許文献1のパチンコ遊技機において、可動体の形状のばらつきや組み付け誤差があると、制御部がステッピングモータを所定のステップ数分駆動したときの可動体の移動位置が一定とならない。可動体の上記移動位置が所定の第2位置よりも往動方向側に位置していた場合、制御部は、ステッピングモータを所定のステップ数分駆動して可動体を往動させる度に、所定のステップ数分の駆動を完了する前に、可動体を所定の第2位置を越えて往動させてストッパーに接触させ、また、ストッパーに接触後も可動体を往動させようとすることを繰り返すことで、可動体が破損してしまう可能性がある。
【0006】
本発明は、上記実状に鑑みてなされたものであり、演出時に、可動体を破損させることなく可動させる遊技機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の遊技機は、可動体と、ステッピングモータと、第1の判定手段と、第2の判定手段と、第1の駆動制御手段と、ステップ数計測手段と、可動ステップ数記憶手段と、第2の駆動制御手段と、を備える。
【0008】
可動体は、第1位置と第2位置とを含む所定の経路に沿って往復移動可能に遊技機本体に支持される。ステッピングモータは、ステップ数による回転制御が可能であり、可動体に連結されて可動体を駆動する。第1の判定手段は、可動体が第1位置にあるか否かを判定する。第2の判定手段は、可動体が第2位置にあるか否かを判定する。第1の駆動制御手段は、ステッピングモータの駆動を制御して、可動体が第1位置にあると第1の判定手段が判定してから、可動体が第2位置にあると第2の判定手段が判定するまで、可動体を所定の経路に沿って往動させ、且つ、可動体が第2位置にあると第2の判定手段が判定してから、可動体が第1位置にあると第1の判定手段が判定するまで、可動体を所定の経路に沿って復動させる。ステップ数計測手段は、第1の駆動制御手段の制御によって可動体が往動又は復動するときのステッピングモータのステップ数をカウントする。可動ステップ数記憶手段は、ステップ数計測手段が計測したステップ数以下のステップ数を可動ステップ数として記憶する。第2の駆動制御手段は、遊技中にステッピングモータの駆動を制御して、可動体が第1位置にあるとき、ステッピングモータを可動ステップ数分駆動させ、可動体を所定の経路に沿って往動させて可動体による演出を行う。
【0009】
上記構成では、ストッパーを所定の経路上の往動方向の端部に設けた場合であっても、第2の駆動制御手段は、遊技中に可動体による演出を行う際に、第2位置を越えて可動体を往動させないので、可動体をストッパーに接触させない、又は、可動体がストッパーに接触後、可動体を往動させようとしない。このため、可動体の破損を防止することができる。
【0010】
また、上記遊技機は、インデックスと、デフォルトステップ数記憶手段と、を備えてもよい。インデックスは、可動体に設けられて可動体と一体的に可動する。デフォルトステップ数記憶手段は、デフォルトステップ数が予め記憶されている。また、第1の判定手段は、遊技機本体に固定され、第1位置における可動体の前記インデックスを検知することによって可動体が第1位置にあると判定するインデックス検知手段であってもよい。第2の判定手段は、インデックス検知手段がインデックスを検知している状態から第1の駆動制御手段によってステッピングモータがデフォルトステップ数分駆動されて可動体が所定の経路に沿って往動したときに可動体が第2位置にあると判定してもよい。ステップ数計測手段は、第1の駆動制御手段の制御によって可動体が復動するときのステッピングモータのステップ数をカウントしてもよい。
【0011】
上記構成では、ステップ数計測手段は、第1の駆動制御手段の制御によって可動体が復動するときのステッピングモータのステップ数をカウントする。したがって、例えば、ストッパーを所定の経路上の往動方向の端部に設け、且つ、第1の駆動制御手段がステッピングモータを所定のステップ数分駆動して可動体を往動させる際、所定のステップ数分の駆動を完了する前に、可動体がストッパーに接触してしまう場合であっても、演出時においては、第2の駆動制御手段は、第1の駆動制御手段によって可動体が復動するときのステッピングモータのステップ数以下のステップ数を可動ステップ数として、ステッピングモータを駆動させて可動体を往動させるので、第2駆動手段は、可動体をストッパーに接触させない、又は、可動体がストッパーに接触後、可動体を往動させようとしない。このため、可動体の破損を防止することができる。
【0012】
上記遊技機は、第3の判定手段を備えてもよい。第3の判定手段は、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値以上であるか否かを判定する。また、可動ステップ数記憶手段は、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値以上であると第3の判定手段が判定したときは、ステップ数計測手段がカウントしたステップ数以下のステップ数を可動ステップ数として記憶し、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値未満であると第3の判定手段が判定したときはデフォルトステップ数を可動ステップ数として記憶してもよい。
【0013】
上記構成では、可動体の形状のばらつきや組み付け誤差などの程度が比較的大きく、デフォルトステップ数とステップ数計測手段がカウントしたステップ数との差が所定値以上である場合に、可動体ステップ数記憶手段は、ステップ数計測手段がカウントしたステップ数以下のステップ数を可動ステップ数として記憶することができる。
【発明の効果】
【0014】
本発明によれば、演出時に、可動体を破損させることなく可動させることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態例に係るパチンコ機の外観斜視図である。
【図2】図1のパチンコ機のガラス扉及び前面ボードを開放した斜視図である。
【図3】図1のパチンコ機の背面図である。
【図4】図2のパチンコ機の統合表示ユニットの拡大正面図である。
【図5】図2のパチンコ機の可動演出ユニットの拡大斜視図である。
【図6】図5の可動演出ユニットの要部分解斜視図である。
【図7】図5の可動演出ユニットの装飾部及び上ケースを除いた図である。
【図8】図7の可動演出ユニットを上方から視た図である。
【図9】図1のパチンコ機の電気的構成を示すブロック図である。
【図10】第1の実施形態の最大可動ステップ数設定処理を示すフローチャートである。
【図11】第2の実施形態の図7の可動演出ユニットを上方から視た図である。
【図12】第2の実施形態の最大可動ステップ数設定処理を示すフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の説明において、左右方向は遊技機を前方(遊技者側)から視た左右方向に対応している。
【0017】
図1に示すパチンコ遊技機(以下、「パチンコ機」と略称する)Pは、遊技球を遊技媒体として用いるものであり、遊技者は、遊技場運営者から遊技球を借り受けてパチンコ機Pによる遊技を行う。なお、パチンコ機Pにおける遊技において、遊技球はその1個1個が遊技価値を有した媒体であり、遊技の成果として遊技者が享受する特典(利益)は、例えば遊技者が獲得した遊技球の数に基づいて遊技価値に換算することができる。以下、図1〜図8を参照して遊技機の構成について説明する。
【0018】
[遊技機の全体構成]
図1〜図3に示すように、パチンコ機Pは、機枠(外枠)1と内枠扉(前面枠)2とガラス扉3と遊技盤5とを備える。機枠1は、縦長矩形状の木製枠体であり、遊技場内の島設備(図示省略)に対して締結固定される。内枠扉2は、機枠1に開閉自在に取り付けられ、ガラス扉3は、内枠扉2に開閉自在に取り付けられる。内枠扉2及びガラス扉3の開閉軸は、パチンコ機Pの一側(図1中の左側)の端縁に沿って上下方向に延びる。
【0019】
遊技盤5は、内枠扉2の内側に収容され、内枠扉2に対して着脱可能に固定される。ガラス扉3の中央部には、縦長円形状の開口窓6が形成され、開口窓6には、遊技盤5の前方を覆う透明なガラス板7が取り付けられる。遊技盤5の前面(盤面)は、遊技者が開口窓6を介して前方から視認可能な遊技領域8を含み、ガラス扉3が閉じられると、ガラス板7の内面(後面)と遊技領域8との間に遊技球が流下可能な空間が形成される。
【0020】
内枠扉2の一側(図1中の右側)の縁部には、シリンダ錠9が設けられている。機枠1に対して内枠扉2及びガラス扉3を閉じてシリンダ錠9を施錠すると、機枠1に対する内枠扉2及びガラス扉3の開放が禁止される。
【0021】
ガラス扉3は、その下部に前面ボード4を一体的に有し、前面ボード4には、前方へ突出する上皿10と下皿11とが設けられる。上皿10は前面ボード4の上部に配置され、下皿11は上皿10の下方に配置される。上皿10には、遊技者に貸し出された遊技球(貸球)や入賞により獲得した遊技球(賞球)が貯留され、下皿11には、上皿10が満杯の状態でさらに払い出された遊技球が貯留される。なお、本実施形態のパチンコ機PはいわゆるCR機(CRユニット50(図9に示す)に接続される機種)であり、遊技者が借り受けた遊技球は、賞球とは別に上皿10に払い出される。
【0022】
前面ボード4の上面には、貸出操作部15と演出ボタン23とが設けられている。貸出操作部15は、球貸スイッチ12と返却スイッチ13と度数表示装置14と球貸表示装置24とを有し、遊技者がCRユニット50(図9に示す)に有価媒体(例えば磁気記録媒体や記憶IC内蔵媒体等)を投入して球貸スイッチ12を操作すると、予め決められた度数単位(例えば500円分に相当する5度数)に対応する個数(例えば125個)分の遊技球が貸し出され、球貸表示装置24に、貸出処理中であることが表示される。度数表示装置14には、CRユニット50に投入されている有価媒体の残存度数が表示される。なお、本実施形態ではCR機を例に挙げているが、パチンコ機Pは、CR機以外の機種(CRユニット50に接続されない機種)であってもよい。また、演出ボタン23は、演出に関する遊技者からの操作を受け付ける。
【0023】
前面ボード4の前面には、上皿球抜き操作部16と下皿球抜き操作部17とが設けられている。上皿球抜き操作部16が操作されると、上皿10の遊技球が下皿11へ流下し、下皿球抜き操作部17が操作されると、下皿11の遊技球が下方へ落下して排出される。下皿11から排出された遊技球は、例えば球受け箱(図示省略)等に受け止められる。
【0024】
前面ボード4の右下部には、発射ハンドル18が回転自在に支持され、内枠扉2の下部には、発射装置19が取り付けられている。上皿1の遊技球は発射装置19に1個ずつ供給され、遊技者が発射ハンドル18を回転操作すると、発射装置19(発射モータ86(図9に示す))が作動し、遊技領域8に向かって遊技球が発射される。遊技領域8は、ガイドレール20及び遊技球規制レール21によって略円形状に区画形成され、発射装置19から発射された遊技球は、レール20,21に沿って滑走して遊技領域8に左上方から進入し、遊技釘や風車等に誘導及び案内されて流下する。
【0025】
ガラス扉3の上部と内枠扉2の下部とには、スピーカ22がそれぞれ取り付けられ、ガラス扉3の前面には、複数の枠体ランプ25が取り付けられている。スピーカ22は、遊技に関する様々な効果音を発する。枠体ランプ25は、例えば内蔵するLEDの発光(点灯や点滅、輝度階調の変化、色調の変化等)により演出を実行する。
【0026】
[盤面の構成]
遊技領域8内には、統合表示ユニット30、演出表示装置31、スルーチャッカ32、電動チューリップ(普通電動役物)33、ステージ34、第1始動入賞口(第1特図始動入賞口)35、第2始動入賞口(第2特図始動入賞口)36、一般入賞口37、アウト口38、アタッカー装置(特別電動役物)39、可動演出ユニット100、複数の盤面ランプ60、遊技釘(図示省略)、及び風車(図示省略)等が設けられている。第1始動入賞口35と第2始動入賞口36とは上下方向に間隔を空けて配置されている。盤面ランプ60は、例えば内蔵するLEDの発光(点灯や点滅、輝度階調の変化、色調の変化等)により演出を実行する。
【0027】
統合表示ユニット30は、演出表示装置31を視認している遊技者の視界に同時に入らないように、遊技盤3の右下部分に配置されている。図4に示すように、統合表示ユニット30は、第1特図表示装置(第1特別図柄表示装置)40と、第2特図表示装置(第2特別図柄表示装置)41と、普図表示装置(普通図柄表示装置)42と、状態表示装置43とを備え、これらの表示装置40〜43は、1つの統合表示基板48に実装された状態で遊技盤5に取り付けられる。
【0028】
第1特図表示装置40は、第1始動入賞口35への遊技球の入賞を契機に行われた第1特別図柄に係る電子抽選の結果を、第1特別図柄(数字や絵柄)を変動させた後に停止表示するものである。第2特図表示装置41は、第2始動入賞口36への遊技球の入賞を契機に行われた第2特別図柄に係る電子抽選の結果を、第2特別図柄(数字や絵柄)を変動させた後に停止表示するものである。本実施形態の第1特図表示装置40及び第2特図表示装置41は、7セグメントLEDによって第1特別図柄及び第2特別図柄を変動後に停止表示する。なお、本実施形態では、第2始動入賞口36への入賞に基づく遊技の方が第1始動入賞口35への入賞に基づく遊技よりも優先して実行される。また、第1特別図柄と第2特別図柄とが同時に変動することはない。
【0029】
普通図柄表示装置42は、スルーチャッカ32の遊技球の通過を契機に行われた普通図柄に係る電子抽選の結果を、普通図柄(数字や絵柄)を変動させた後に停止表示するものである。本実施形態の普通図柄表示装置42は、7セグメントLEDによって普通図柄を変動後に停止表示する。
【0030】
状態表示装置43は、ラウンド数表示部44、第1特図保留数表示部45、第2特図保留数表示部46、及び普図保留数表示部47を有する。ラウンド数表示部44は、4つのランプ(LED)から構成され、ランプの消灯、点灯又は点滅の組合せによって、特別図柄に係る電子抽選の結果に基づいて遊技者に提供される大当たり遊技のラウンド数(本実施形態では、上記電子抽選の結果に基づいて15ラウンド又は2ラウンドの大当たり遊技が提供される)を表示する。第1特図保留数表示部45は、第1始動入賞口35に遊技球が入賞し、当該入賞に応じて取得された第1特図当たり決定乱数(大当たり決定乱数)が第1特図保留乱数としてRAM75の第1特図保留乱数記憶領域(図示省略)に記憶されると、その記憶数を現在の保留数として表示する。第2特図保留数表示部46は、第2始動入賞口36に遊技球が入賞し、当該入賞に応じて取得された第2特図当たり決定乱数(大当たり決定乱数)が第2特図保留乱数としてRAM75の第2特図保留乱数記憶領域(図示省略)に記憶されると、その記憶数を現在の保留数として表示する。普図保留数表示部47は、スルーチャッカ32を遊技球が通過し、当該通過に応じて取得された普図当たり決定乱数(当たり決定乱数)が普図保留乱数としてRAM75の普図保留乱数記憶領域(図示省略)に記憶されると、その記憶数を現在の保留数として表示する。これらの保留数表示部45,46,47は、それぞれランプ(LED)から構成され、ランプの消灯、点灯又は点滅の組合せによって「0」個〜「4」個(保留球乱数の記憶数の上限)の間で保留数を表示する。
【0031】
図2に示すように、演出表示装置31は、液晶の画像表示器を有し、遊技盤3の略中央部に設けられ、第1始動入賞口35及び第2始動入賞口36への遊技球の入賞を契機に行われた特別図柄に係る電子抽選の結果に基づいて所定の演出画像を表示する。演出画像には、第1特図表示装置40及び第2特図表示装置41に変動表示される第1特別図柄及び第2特別図柄と同期をとって変動するダミー図柄(演出図柄)と、第1特図当たり決定乱数の保留数表示と、第2特図当たり決定乱数の保留数表示とが含まれる。また、演出表示装置31は、遊技が行われていない待機状態では遊技の内容を紹介する動画などのデモンストレーション映像(デモ画面)を表示する。
【0032】
電動チューリップ33は、1対の羽根部材49と電動チューリップ駆動装置51(図9に示す)とを備える。1対の羽根部材49は、遊技盤3との直交軸を中心に回転自在であり、第2始動入賞口36の入口の左右に配置される。電動チューリップ駆動装置51のソレノイド(図示省略)が通電されると、1対の羽根部材が互いに離れる方向に回転し、電動チューリップ33が開口して、第2始動入賞口36の入口が拡大される。電動チューリップ33が閉じた状態(通常状態)では、第2始動入賞口36に遊技球は入賞できず、第2始動入賞口36への入賞は、電動チューリップ33の開口時に制限される。
【0033】
ステージ34は、遊技球が転動しながら一時的に滞在する構造物であり、演出表示装置31の下方に配置される。ステージ34の略中央の真下に第1始動入賞口35が配され、ステージ34の中央部分から落下した遊技球は、高い確率で第1始動入賞口35へと導かれる。
【0034】
可動演出ユニット100は演出表示装置の前方に配設されており、ステージの右側に隣接している。図5〜図8に示すように、可動演出ユニット100は、可動役物(可動体)120と、ケース101と、ギアボックス102と、ステッピングモータ103と、スクリューシャフト104と、ガイドシャフト105と、を有する。
【0035】
ケース101は、上面を開口する有底細長形状の下ケース107と、下ケース107の上部開口端を塞ぐ上ケース106と、がスナップ結合によって一体化されて構成されている。ケース101は、内側に収容空間108を区画する。下ケース107と上ケース106の短辺側の接合面にはスクリューシャフト104とガイドシャフト105の各両端が回転可能に支承されており、これらスクリューシャフト104とガイドシャフト105は前後方向に所定の間隔で離間して、収容空間108内で左右方向に平行に延びている。上ケース106には左右方向に延びる横長矩形状の挿通孔109が形成されており、この挿通孔109はスクリューシャフト104とガイドシャフト105の間に位置して両者と平行に延びている。
【0036】
下ケース107の左端部近傍の内底面にはストッパー110が立設されており、このストッパー110はスクリューシャフト104とガイドシャフト105の下方位置で両者と直交する方向へ平板状に延びている。ストッパー110は、可動役物120が図5及び図8に示すX1方向に移動して最も左側に位置するときに、後述する可動体120の台座部122の左側面に接触して、可動役物120のX1方向への移動を規制する。下ケース107の内底面の右側には回路基板111が搭載されており、この回路基板111上には発光部112aと受光部112bとを備えるフォトインタラプタからなる右側インデックス検知センサ(第1の判定手段、インデックス検知手段)112が実装されている。
【0037】
また、下ケース107の右側面にはギアボックス102がねじ止めされており、下ケース107の下方に配置されたステッピングモータ103がギアボックス102の左側面に固定されている。ステッピングモータ103の回転軸103a(図7参照)は、後述するサブ制御装置72から所定の正転のための励磁パターン又は逆転のための励磁パターンに従って出力されるパルス信号を1パルス受信する毎に1ステップずつ正転(パチンコ機Pの左側から視て時計回りに回転)又は逆転(同側から視て反時計回りに回転)する。ステッピングモータ103の回転軸103aは、正逆いずれかの方向に連続して200ステップ駆動することによって1回転する。すなわち、1ステップにつき1.8度(基本ステップ角)回転する。ステッピングモータ103の回転軸103aにはギア113が取り付けられており、このギア113は中継ギア114を介してスクリューシャフト104の一端に取り付けられたギア115に噛合している。各ギア113,114,115はギアボックス102の内部に収納されており、回転軸103aが正逆いずれかの方向へ回転すると、その回転が各ギア113,114,115を介してスクリューシャフト104に伝達されるようになっている。
【0038】
可動役物120は、装飾部121と、台座部122と、によって構成され、装飾部121及び台座部122は、合成樹脂材料などによって形成されている。装飾部121は、銃を手にした人物を模して形成されている。台座部122は、上側台座部123、下側台座部124及び筒状部125によって構成されている。上側台座部123及び下側台座部124は、スクリューシャフト104とガイドシャフト105を上下方向から挟んでねじ止めすることにより一体化されている。
【0039】
下側台座部124の略中央部には下側嵌合孔126が形成されており、下側台座部124の上面には下側嵌合孔126を挟んで前後に並んで左右方向に平行に延びる一対のガイド溝127が形成されている。また、下側台座部124の右側面には右方に突出し、左右方向に所定の幅を有する平板状の右側インデックス(インデックス)128が形成されている。右側インデックス128は、可動役物120が所定の位置にあるときに、右側インデックス検知センサ112の発光部112aと受光部112bとの間に介在する。右側インデックス検知センサ112は、発光部112aと受光部112bとの間に右側インデックス128が介在するとき、右側インデックス検知信号を後述するサブ制御装置72に出力する。
【0040】
上側台座部123の略中央部には、下側嵌合孔126と連通する上側嵌合孔129が形成されており、上側台座部123の下面には上側嵌合孔129を挟んで前後に並んで左右方向に平行に延びる一対のU字状溝130が形成されている。筒状部125は、上下方向に延び、下部が、連通した下側嵌合孔126と上側嵌合孔129とに挿通して嵌合し、下側台座部124及び上側台座部123に固定される。また、筒状部125の上端部は、上ケース106の挿通孔109を挿通し、装飾部121の下端部に設けられた嵌合孔(図示省略)に嵌合する。これにより、装飾部121、筒状部125及び台座部122は、一体化されている。
【0041】
スクリューシャフト104は上側台座部123の前方のU字状溝130と下側台座部124の前方のガイド溝127とで画成される円筒状孔に挿通されており、この円筒状孔の内部でU字状溝130の内周面に突設された係合部(図示省略)がスクリューシャフト104の外周面に刻設された螺旋状溝104aと係合している。また、ガイドシャフト105は上側台座部123の後方のU字状溝130と下側台座部124の後方のガイド溝127とで画成される円筒状孔に挿通されている。したがって、ステッピングモータ103を駆動源としてスクリューシャフト104が回転すると、可動役物120は、ガイドシャフト105に案内されながらスクリューシャフト104の軸線に沿った所定の経路上を水平方向(図5及び図8のX1−X2方向)に往復動可能となっている。具体的には、ステッピングモータ103の回転軸103aが正転したときは、X1方向に移動(往動)し、回転軸103aが逆転したときは、X2方向に移動(復動)する。
【0042】
アタッカー装置39は、第1始動入賞口35及び第2始動入賞口36に遊技球が入賞することを契機に行われる特別図柄に係る電子抽選の結果、特図当たり(大当たり)となって大当たり遊技に移行した場合に所定回数(本実施形態では、2ラウンド又は15ラウンド)開放される装置である。アタッカー装置39は、横長矩形状の大入賞口52と横長板状の蓋部材53とアタッカー駆動装置54(図9に示す)とを備える。蓋部材53の下部は、水平な軸を中心として前後方向に開閉自在に支持され、アタッカー駆動装置54のソレノイド(図示省略)が通電されると、蓋部材53の上部が前下方へ傾動し、アタッカー装置39が開口して大入賞口52が露呈され、多量の遊技球が蓋部材53の上面(裏面)に案内されて大入賞口52へ入賞可能となる。アタッカー装置39が閉じた状態(通常状態)では、蓋部材54が大入賞口54を閉止するため、大入賞口52への入賞は、アタッカー装置39の開口時に制限される。
【0043】
各入賞口(第1始動入賞口35、第2始動入賞口36、一般入賞口37、大入賞口52)に遊技球が入賞すると、所定個数の遊技球が賞球として遊技者に払い出され、入賞した遊技球は、その入賞口35,36,37,52から遊技盤5の裏側へ回収される。また、何れの入賞口35,36,37,52にも入賞しなかった遊技球は、最終的にアウト口38から遊技盤5の裏側へ回収される。回収された遊技球は、アウト通路アセンブリ(図示省略)を通じてパチンコ機Pの裏側から枠外へ排出され、さらに島設備の補給経路(図示省略)に合流する。
【0044】
スルーチャッカ32、第1始動入賞口35、第2始動入賞口36、一般入賞口37、大入賞口52の内部には、それぞれ遊技球の通過を検知するためのセンサ(図9に示すゲート通過球検知センサ55、第1特図始動球検知センサ56、第2特図始動球検知センサ57、大入賞球検知センサ58及び一般入賞球検知センサ59)が設けられている
[裏側の構成]
図3に示すように、パチンコ機Pの裏側には、電源供給装置61、主制御基板ユニット62、払出制御基板ユニット63、サブ制御基板ユニット64、外部情報端子基板65、電源コード(電源プラグ)66、アース線(アース端子)67、パチンコ機Pの電源系統や制御系統を構成する各種の電子機器類(図示外の制御コンピュータを含む)等が設置されている。
【0045】
外部情報端子基板65は、パチンコ機Pを外部の電子機器(例えば、ホールコンピュータ68(図9に示す)やデータ表示装置等)に接続するためのインタフェースであり、パチンコ機Pの遊技進行状態やメンテナンス状態等を表す各種の外部情報信号(例えば賞球情報、扉開放情報、図柄確定回数情報、大当たり情報、始動口情報等)は、外部情報端子基板65から外部の電子機器に送信される。
【0046】
電源コード66は、遊技場の島設備に設置された電源装置(例えばAC24V)に接続されて、パチンコ機Pの動作に必要な電源(電力)を確保する。アース線67は、島設備に設置されたアース端子に接続され、パチンコ機Pをアース(接地)する。
【0047】
[制御に関する構成]
次に、パチンコ機Pの制御に関する構成について説明する。図9は、パチンコ機Pに装備された各種の電子機器類を示すブロック図である。
【0048】
パチンコ機Pは、主制御装置70と払出制御装置71とサブ制御装置72とを備える。主制御装置70は、制御動作の中枢であり、主にパチンコ機Pにおける遊技処理の実行を制御する機能を有し、主制御基板ユニット62に内蔵されている。払出制御装置71は、主に遊技球の払い出しと発射とを制御する機能を有し、払出制御基板ユニット63に内蔵されている。サブ制御装置72は、主に演出を制御する機能を有し、サブ制御基板ユニット64に内蔵されている。主制御装置70と払出制御装置71とは、双方向通信が可能なシリアル通信によって接続されている。
【0049】
(電源供給装置61)
電源供給装置61は、電源コード66を通じて島設備から外部電源(例えば、24Vの交流電源)の供給を受け、この交流電源をパチンコ機Pで使用する複数の定電圧の直流電源や粗整流の直流電源に変換し、主制御装置70、払出制御装置71、サブ制御装置72等に供給する。
【0050】
(主制御装置70)
主制御装置70には、中央演算処理装置(中央命令処理部)である主制御CPU73を実装した回路基板(主制御基板)が装備されており、主制御CPU73は、CPUコア、各種レジスタ(汎用レジスタ、フラグレジスタ、インデックスレジスタ、リフレッシュレジスタ、割込みレジスタ、命令レジスタなど)、スタックポインタ、プログラムカウンタ、命令レコーダ(何れも図示省略)等を含み、ROM74やRAM(RWM)75等の半導体メモリとともにLSIとして構成されている。各レジスタは、演算結果、次に読み込む命令のアドレス、実行状態等を保持する。また主制御装置70には、ハード乱数発生回路76やサンプリング回路(図示省略)が装備されている。ハード乱数発生回路76は、ハードウェア乱数(例えば10進数表記で0〜65535)を発生させるものであり、発生させた乱数は、サンプリング回路を通じて主制御CPU73に入力される。ハードウェア乱数は、大当たり判定用の第1特図当たり決定乱数及び第2特図当たり決定乱数や、当たり(普図当たり)判定用の普図当たり決定乱数として用いられる。主制御装置70には、クロック(周波数発生回路部)77、入出力(I/O)ポート、カウンタ/タイマ回路(CTC)等の周辺ICが装備されており、これらは主制御CPU73とともに回路基板上に実装されている。
【0051】
また、主制御CPU73は、周期的(例えば4ミリ秒毎)に入力される割り込み信号に基づいてループカウンタの値を所定の範囲で1ずつ更新させることによりソフトウェア乱数を生成するソフトウェア乱数発生手段(図示省略)としても機能する。また、主制御CPU73は、演出態様を決定するためのコマンドである変動パターンコマンドを決定し、サブ制御装置72に送信する変動パターンコマンド決定手段(図示省略)としても機能する。変動パターンコマンド決定手段は、第1特図当たり決定乱数又は第2特図当たり決定乱数と、ソフトウェア乱数発生手段が生成したソフトウェア乱数に基づいて、特別図柄に係わる電子抽選の結果に応じて予め設定されている演出のための複数の変動パターンコマンドの中から一つを選択して決定し、決定した変動パターンコマンドをサブ制御装置72に送信する。なお、予め設定されている演出のための複数の変動パターンコマンドは、それぞれ異なる演出態様に対応している。
【0052】
RAM75には、各種フラグの記憶領域を含むワーク領域(図示省略)が設けられ、割込み発生時やサブルーチンや関数を呼び出す際に、処理中のデータや戻りアドレスなどがワーク領域のスタック領域(退避領域)に一時的に退避される。また、主制御CPU73は、ROM74に記憶されている遊技制御用プログラムに従って処理を実行することにより、電源断検知手段及び実行制御手段として機能する。
球検知センサ類56〜59の入賞検知信号は、入出力ドライバ(図示省略)を介して主制御CPU73に入力される。なお、本実施形態では、第1特図始動球検知センサ56及び第2特図始動球検知センサ57からの入賞検知信号は、主制御装置70に直接送信され、ゲート通過球検知センサ55、大入賞球検知センサ58及び一般入賞球検知センサ59からの入賞検知信号は、中継端子板(図示省略)を経由して主制御装置70に送信される。
【0053】
第1特図表示装置40、第2特図表示装置41、普図表示装置42、及び状態表示装置43の各表示は、主制御CPU73からの制御信号によって制御される。主制御CPU73は、遊技の進行状況に応じてこれら表示装置40〜43に対する制御信号を出力し、各LEDの点灯状態を制御する。
【0054】
電動チューリップ駆動装置51及びアタッカー駆動装置54の駆動は、主制御CPU73からの制御信号によって制御される。各駆動装置51,54のソレノイドは、主制御CPU73からの制御信号に基づいて動作(励磁)し、電動チューリップ33及びアタッカー装置39を開閉動作(作動)させる。
【0055】
ガラス扉3にはガラス扉開放スイッチ78が設置され、内枠扉2には内枠扉開放スイッチ79が設置される。内枠扉2からガラス扉3が開放されると、ガラス扉開放スイッチ78からの接点信号が払出制御装置71を経由して主制御装置70に入力される。スイッチ78,79から接点信号を受信した主制御CPU73は、扉が開放したことを音やLEDや液晶などによって報知するため、これらの報知処理の実行を指示する制御信号をサブ制御装置72に送信する。また、スイッチ78,79から接点信号を受信した払出制御装置71は、扉開放を示す外部情報信号を出力する。
【0056】
パチンコ機Pには磁気や電波等を検知するエラー検知センサ98が設けられ、エラー検知センサ98は、磁気や電波等を検知すると、主制御装置70にエラー検知信号を送信する。エラー検知信号を受信した主制御CPU73は、所定のエラー処理を実行するとともに、エラー検知を示す外部情報信号を出力する。
【0057】
(払出制御装置71)
払出制御装置71には、払出制御CPU80を実装した回路基板(払出制御基板)が装備されており、払出制御CPU80も、主制御CPU73と同様に、CPUコア(図示省略)を含み、ROM81、RAM82等の半導体メモリとともにLSIとして構成されている。払出制御CPU80は、主制御CPU73から受信した賞球指示コマンド(払出コマンド送信信号)に基づいて遊技球の払い出し動作を制御し、指示された個数の遊技球の払出動作を実行させる。主制御CPU73は、賞球指示コマンドとともに、賞球情報信号を外部情報信号として生成し出力する。
【0058】
遊技場の球補給経路(図示省略)から補給された遊技球は、賞球タンク(図示省略)に蓄えられ、賞球樋(図示省略)を流下して賞球ケース(図示省略)に導入され、賞球ケースから上皿10に供給される。
【0059】
賞球ケースには、払出モータ(例えばステッピングモータ)83が設けられ、払出制御装置71(払出制御基板ユニット63)には、払出モータ83の駆動回路(図示省略)が設けられている。払出制御装置71は、主制御CPU73から受信した賞球指示コマンドに基づいて払出モータ83を回転駆動し、指示された数の遊技球を賞球ケースから払い出させる。払い出された遊技球は、払出流路(図示省略)を通って前面ボード4へ流下する。
【0060】
払出モータ83の下流側には払出計数スイッチ84が設置され、払出モータ83の駆動によって実際に賞球が払い出されると、払出計数スイッチ84からの計数信号が払出制御装置71に送信される。払出制御CPU80は、受信した計数信号に基づき、実際の払出数や球切れ状態を検知して、遊技球の払い出しを管理する。
【0061】
上皿10(図1に示す)への遊技球の供給経路には皿満タンスイッチ85が設置され、下皿11(図1に示す)が遊技球で満杯になると、皿満タンスイッチ85がONになり、満タン検出信号が払出制御装置71に送信される。満タン検出信号を受信した払出制御CPU80は、主制御CPU73から受信した賞球指示コマンドに応じた賞球動作を一旦保留とし、未払出の賞球残数をRAM82に記憶させておく。なお、RAM82の記憶は電源断時にもバックアップが可能であり、遊技中に停電(瞬間的な停電を含む)が発生しても、未払出の賞球残数情報が消失してしまうことはない。
【0062】
発射装置19(図2に示す)には、発射モータ86と球送りソレノイド87とが設けられ、発射ハンドル18(図1に示す)には、発射ボリューム88とタッチセンサ89と発射停止スイッチ90とが設けられている。球送りソレノイド87は、上皿10(図1に示す)から流下した遊技球を1個ずつ発射位置に送り出し、発射モータ86は、発射位置に送り出された遊技球を打ち出す。なお遊技球の発射間隔は、例えば0.6秒程度(1分間で100個以内)である。
【0063】
発射ボリューム88は、発射ハンドル18(図1に示す)の回転操作量(ストローク)に比例した発射勢指示信号を払出制御装置71に送信する。タッチセンサ89は、静電容量の変化から遊技者の身体が発射ハンドル18に触れていることを検出し、その検出信号を払出制御装置71に送信する。発射停止スイッチ90は、遊技者から操作されたときに発射停止信号(接点信号)を払出制御装置71に送信する。
【0064】
遊技者が発射ハンドル18を回転操作すると、発射ボリューム88から払出制御装置71に回転操作量に応じた発射勢指示信号が送信される。払出制御CPU80は、受信した発射勢指示信号に基づいて発射モータ86の駆動を制御する。これにより、遊技者の操作量に応じて遊技球の打ち出し強さが調整される。但し、払出制御CPU80は、タッチセンサ89からの検出信号がオフ(ローレベル)の場合、及び発射停止スイッチ90から発射停止信号が入力された場合には、発射モータ86の駆動を停止する。この他、払出制御CPU80は、パチンコ機PにCRユニット50が接続されていない場合、発射モータ86の駆動を停止する。
【0065】
球貸スイッチ12又は返却スイッチ13が操作されると、その操作信号が中継基板91を経由してCRユニット50に送信される。CRユニット50からは、有価媒体の残り度数を表す度数信号が中継基板91を経由して度数表示装置14に送信される。
【0066】
(サブ制御装置72)
サブ制御装置72には、演出制御CPU(第1の判定手段、インデックス検知手段、第2の判定手段、第1の駆動制御手段、ステップ数計測手段、第2の駆動制御手段、第3の判定手段)92を実装した回路基板(複合サブ制御基板)が装備されており、演出制御CPU92も、主制御CPU73と同様に、CPUコア(図示省略)を含み、ROM93、RAM(可動ステップ数記憶手段)94等の半導体メモリとともにLSIとして構成されている。サブ制御装置72には、入出力ドライバや各種の周辺IC(共に図示省略)が装備されている。
【0067】
サブ制御装置72のROM93には、演出の制御に関する演出制御プログラム及び複数の演出パターンが格納されており、演出制御CPU92は、格納された演出制御プログラムに従い、主制御CPU73から送信される変動パターンコマンドに基づいて、複数の演出パターンから一つの演出パターンを選択して、演出表示装置31、各種ランプ25,60、音発生装置97及び可動演出ユニット100の演出の制御を実行する。演出表示装置31は、画像プロセッサや液晶等を含み、音発生装置97は、サウンドプロセッサやスピーカ22等を含む。演出の制御には、演出表示装置31の画像の表示制御、各種ランプ25,60の発光制御、スピーカ22からの音声発生制御、及び可動演出ユニット100のステッピングモータ103の駆動制御が含まれる。なお、画像プロセッサ及びサウンドプロセッサは、サブ制御基板ユニット64に設けてもよい。
【0068】
サブ制御装置72のRAM94には、演出制御CPU92が可動演出ユニット100の駆動制御を行う際に用いられる最大可動ステップ数が記憶されている最大可動ステップ数記憶領域が設定されている。最大可動ステップ数とは、演出時における可動演出ユニット100の駆動制御において、演出制御CPU92が可動演出ユニット100のステッピングモータ103を連続して正転させる場合に許容される最大のステップ数である。パチンコ機Pの電源投入直後の初期状態における最大可動ステップ数記憶領域には、デフォルトステップ数が記憶されている。デフォルトステップ数は、パチンコ機Pの設計時のシミュレーションや量産試作時における可動役物120の形状のばらつきや組み付け誤差などがない理想的な状態の試作品の試験結果などに基づいて、予め設定されている。デフォルトステップ数は、右側インデックス検知センサ112がX2方向に復動する可動役物120の右側インデックス128の検知を開始する位置(第1位置)からデフォルトステップ数分ステッピングモータ103を正転させて可動役物120をX1方向(図5及び図8参照)に往動させたときに、可動役物120の台座部122がストッパー110の近傍で、且つ、台座部122の左側面がストッパー110に接触しない位置で停止するように設定されている。なお、本実施形態において、後述する最大可動ステップ数設定処理を実行した後に、最大可動ステップ数記憶領域に記憶されている最大可動ステップ数分ステッピングモータ103が正転したことに伴って可動役物120が第1位置から往動した位置を、最大可動位置と称する。また、RAM94には、後述する最大可動ステップ数設定処理において、演出制御CPU92がカウントしたステッピングモータ103の駆動ステップ数のカウント値を記憶するカウント値記憶領域が設定されている。上記初期状態におけるカウント値記憶領域には、カウント値として0が記憶されている。
【0069】
演出制御CPU92は、可動演出ユニット100の駆動制御において、主制御CPU73から送信される変動パターンコマンドに基づいて、ROM93に格納された複数の演出パターンから一つの演出パターンを選択し、選択した演出パターンに応じて、所定の正転のための励磁パターン又は逆転のための励磁パターンに従ってパルス信号をステッピングモータ103に出力して、ステッピングモータ103の駆動を制御し、ステッピングモータ103を正転又は逆転させ、可動役物120を往動又は復動させる。また、演出制御部CPU92は、選択した演出パターンで可動演出ユニット100を正確に制御できるように、駆動制御開始時に、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かを判定する。受信していた場合は、駆動制御を継続し、受信していなかった場合は、駆動制御を中止する。
【0070】
また、演出制御部CPU92は、駆動制御終了時に、右側インデックス検知センサ112から出力された右側インデックス検知信号の受信を開始してから、所定の押し込みステップ数分、本実施形態では2ステップ分ステッピングモータ103を逆転させるパルス信号(すなわち逆転のための励磁パターンに従って2パルスのパルス信号)を出力し、その後にステッピングモータ103の駆動を停止し、可動役物120を停止させる押し込み処理を実行する。これにより、可動役物120は、第1位置から、更に図のX2方向(右側)に移動した位置(原点位置)で停止するので、可動役物120の停止後に、外部からパチンコ機Pに伝達される振動などが原因で、可動役物120が図のX1方向(左側)に多少移動した場合であっても、右側インデックス検知センサ112が右側インデックス128を検知している状態を確実に維持することができる。
【0071】
したがって、演出制御CPU92は、可動演出ユニット100の駆動制御において、主制御CPU73から送信される変動パターンコマンドに基づいて選択した演出パターンが、可動役物120を第1位置から最大可動位置まで往動させて、その後最大可動位置から第1位置まで復動させる内容の演出パターンであった場合、押し込みステップ数の2ステップにRAM94の最大可動ステップ数記憶領域に記憶されている最大可動ステップ数を加算したステップ数分ステッピングモータ103を正転させるパルス信号を出力し、その後、ステッピングモータ103を逆転させるパルス信号を右側インデックス検知センサ112が右側インデックス128を検知するまで出力し、右側インデックス検知センサ112が右側インデックス128の検知を開始すると、上記の押し込み処理を実行して、可動役物120を原点位置で停止させ、可動演出ユニット100の駆動制御を終了する。
【0072】
また、サブ制御装置72のROM93には、最大可動ステップ数設定プログラムが格納されており、演出制御CPU92は、格納された最大可動ステップ数設定プログラムに従い、最大可動ステップ数設定処理を、遊技機の電源投入時における入出力チェックやメモリチェックなどの一連のいわゆる初期動作の一環として実行する。
【0073】
最大可動ステップ数設定処理において、演出制御CPU92は、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かに基づいて、右側インデックス検知センサ112が可動役物120の右側インデックス128を検知しているか否かを判定する。受信している場合は、右側インデックス検知センサ112が右側インデックス128を検知していると判定し、所定のステップ数分、本実施形態では10ステップ分ステッピングモータ103を正転させるパルス信号を出力する。これによって、可動役物120を、X1方向(図5及び図8参照)に、右側インデックス検知センサ112が右側インデックス128を検知しない位置まで往動させる。次に、演出制御CPU92は、右側インデックス検知センサ112から出力される右側インデックス検知信号を受信するまで、ステッピングモータ103を逆転させるパルス信号を出力し、可動役物120をX2方向に復動させる。右側インデックス検知信号を受信すると、演出制御CPU92は、可動体役物が第1位置にあると判定し、パルス信号の出力を停止する。このとき、演出制御CPU92は、上記押し込み処理を実行しない。すなわち、演出制御CPU92は、可動役物120を第1位置で停止させる。
【0074】
次に、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域を参照し、記憶されているデフォルトステップ数分、本実施形態では、400ステップ数分ステッピングモータ103を正転させるパルス信号を出力する。これによって、可動役物120は、第1位置からステッピングモータ103がデフォルトステップ数の400ステップ数分正転することに伴ってX1方向に往動する位置、すなわち本実施形態における第2位置まで往動する。演出制御CPU92は、ステッピングモータ103を400ステップ数分正転させるパルス信号の出力を終了したとき、可動役物120が第2位置にあると判定する。可動役物120が第2位置にあると判定した演出制御CPU92は、右側インデックス検知センサ112から出力される右側インデックス検知信号を受信するまで、ステッピングモータ103を逆転させるパルス信号を出力して、可動役物120を第2位置から第1位置へ復動させる。
【0075】
また、演出制御CPU92は、可動役物120を第2位置から第1位置へ復動させるときにステッピングモータ103へ出力したパルス信号のパルス数を、ステッピングモータ103の駆動ステップ数としてカウントする。具体的には、演出制御CPU92は、ステッピングモータ103にパルス信号を1パルス出力する度に、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶する。また、右側インデックス検知信号を受信すると、演出制御CPU92は、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数との差の絶対値が所定値、本実施形態では5以上であるか否かを判定する。例えば、カウントしたステップ数が395ステップで、且つ、デフォルトステップ数が400ステップの場合など、両値の差の絶対値が5以上の場合、カウントしたステップ数から所定のステップ数、本実施形態では1ステップを引いた394ステップを最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に更新して記憶し、最大可動ステップ数設定処理を終了する。一方、カウントしたステップ数が399ステップで、且つ、デフォルトステップ数が400ステップの場合など、両値の差の絶対値が5未満の場合は、上述のようにRAM94の最大可動ステップ数記憶領域の更新記憶を行わないで最大可動ステップ数設定処理を終了する。すなわち、この場合は、デフォルトステップ数の400ステップが最大可動ステップ数として最大可動ステップ数記憶領域に記憶されている状態を維持する。なお、演出制御CPU92は、最大可動ステップ数設定処理の終了時に、RAM94のカウント値記憶領域に記憶されているカウント値をクリアする。
【0076】
(外部への出力)
主制御装置70及び払出制御装置71において生成された各種の外部情報信号は、外部情報端子基板65から外部に出力される。外部情報端子基板65から出力される信号は、例えば遊技場のホールコンピュータ68で集計される。
【0077】
[最大可動ステップ数設定処理]
次に、サブ制御装置72の演出制御CPU92が実行する最大可動ステップ数設定処理について、図10のフローチャートを参照して説明する。
【0078】
最大可動ステップ数設定処理を開始すると、演出制御CPU92は、右側インデックス検知センサ112が可動役物120の右側インデックス128を検知しているか否かを判定する。検知している場合(ステップS1:YES)は、ステップS2に移行する。一方、検知していない場合(ステップS1:NO)は、ステップS3に移行する。
【0079】
ステップS2では、演出制御CPU92は、所定のステップ数分、本実施形態では10ステップ分ステッピングモータ103を正転させるパルス信号を出力して、可動役物120を、X1方向(図5及び図8参照)に、右側インデックス検知センサ112が右側インデックス128を検知しない位置まで往動させ、ステップS3に移行する。
【0080】
ステップS3では、演出制御CPU92は、ステッピングモータ103を1ステップ分逆転させるパルス信号を出力し、可動役物120をX2方向に復動させ、ステップS4に移行する。
【0081】
ステップS4では、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かに基づき、可動役物120が第1位置にあるか否かを判定し、第1位置にある場合(ステップS4:YES)、パルス信号の出力を停止して可動役物120を第1位置で停止させ、ステップS5に移行する。一方、第1位置にない場合(ステップS4:NO)は、ステップS3に移行する。
【0082】
ステップS5では、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域を参照し、記憶されているデフォルトステップ数分、本実施形態では、400ステップ数分ステッピングモータ103を正転させるパルス信号を出力して、可動役物120を、第1位置から第2位まで往動させ、ステップS6に移行する。
【0083】
ステップS6では、演出制御CPU92は、ステッピングモータ103を1ステップ分逆転させるパルス信号を出力し、可動役物120をX2方向に復動させ、ステップS7に移行する。
【0084】
ステップS7では、演出制御CPU92は、ステッピングモータ103へ出力したパルス数を、可動役物120を復動するときにステッピングモータ103が駆動したステップ数としてカウントし、具体的には、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶し、ステップS8に移行する。
【0085】
ステップS8では、右側インデックス検知センサ112から出力された右側インデックス検知信号を受信しているか否かに基づいて、右側インデックス検知センサ112が可動役物120の右側インデックス128を検知しているか否かを判定し、検知している場合(ステップS8:YES)は、ステップS9に移行する。一方、検知していない場合(ステップS8:NO)は、ステップS6に移行する。
【0086】
ステップS9では、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数(デフォルト値)との差の絶対値が所定値以上、本実施形態では5以上であるか否かを判定し、所定値以上の場合は、ステップS10に移行し、所定値未満の場合は、本処理を終了する。
【0087】
ステップS10では、カウントしたステップ数から所定のステップ数(所定値)、本実施形態では1ステップを引いたステップ数を最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に記憶し、本処理を終了する。
【0088】
以上説明したように、本実施形態によれば、可動役物120の形状のばらつきや組み付け誤差があり、上述のように、演出制御CPU92が、最大可動ステップ数設定処理においてカウントしたステップ数が395ステップで、且つ、デフォルトステップ数が400ステップであるような場合、すなわち、演出制御CPU92が、デフォルトステップ数分ステッピングモータ103を駆動させ、可動役物120をX2方向に往動させると、デフォルトステップ数分の駆動を完了する前に、可動役物120をストッパー110に接触させ、接触後も往動させようとしてしまうような場合(この場合、可動役物120の台座部122の弾性変形やステッピングモータ103の空回りなどが発生し、これらが繰り返し発生すると、可動役物120の破損の原因となる)であっても、遊技中の演出における可動演出ユニット100の駆動制御においては、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域に記憶されている最大可動ステップ数の394ステップ分ステッピングモータ103を駆動させ、可動役物120を最大可動位置まで往動させるので、最大可動位置の可動役物120をストッパー110に接触させない。このため、可動体の破損を防止することができる。
【0089】
また、最大可動ステップ数設定処理においてカウントしたステップ数とデフォルトステップ数との差の絶対値が5以上である場合に、カウントしたステップ数を最大可動ステップ数として記憶することができるので、可動役物120の形状のばらつきや組み付け誤差などの程度が比較的大きく、デフォルトステップ数分ステッピングモータ103を駆動させると、可動役物120が破損する可能性が高い場合に、カウントしたステップ数を最大可動ステップ数として採用することができる。
【0090】
なお、演出制御CPU92は、最大可動ステップ数設定処理においてカウントしたステップ数(上記例では395ステップ)を最大可動ステップ数として、最大可動ステップ数記憶領域に記憶してもよい。この場合、遊技中の演出における可動演出ユニット100の駆動制御においては、演出制御CPU92は、RAM94の最大可動ステップ数記憶領域に記憶されている最大可動ステップ数の395ステップ分ステッピングモータ103を駆動させ、可動役物120を最大可動位置まで往動させるので、可動役物120は最大可動位置でストッパー110に接触して停止するが、演出制御CPU92は、接触後の可動役物120を往動させようとしないので、可動体の破損を防止することができる。
【0091】
次に、本発明の第2の実施形態について説明する。第2の実施形態では、可動演出ユニット100の下ケース107の内底面の左側に左側インデックス検知センサ117を備える回路基板116が搭載されている点、可動役物120の下側台座部124の左側面に左側インデックス131が形成されている点及び演出制御CPU92は、最大可動ステップ数設定処理において、可動役物120を第1位置から左側インデックス131を左側インデックス検知センサ117が検知するまで往動させるときに出力したパルス信号のパルス数をカウントする点が第1の実施形態とは異なる。以下の第2の実施形態において、第1の実施形態と共通する部分については、その説明を省略する。
【0092】
図11に示すように、本実施形態の可動演出ユニット100の下ケース107の端部近傍の内底面に立設されているストッパー110の略中央部には、左側インデックス131を挿通する挿通孔110aが形成されている。下ケース107の内底面の左側には回路基板116が搭載されており、この回路基板116上には発光部117aと受光部117bとを備えるフォトインタラプタからなる左側インデックス検知センサ117が実装されている。
【0093】
また、可動演出ユニット100の可動役物120の下側台座部124の左側面には左方に突出し、左右方向に所定の幅を有する平板状の左側インデックス131が形成されている。左側インデックス131は、可動役物120が所定の位置にあるときに、ストッパー110の挿通孔110aを挿通し、左側インデックス検知センサ117の発光部117aと受光部117bとの間に介在する。左側インデックス検知センサ117は、発光部117aと受光部117bとの間に左側インデックス131が介在するとき、左側インデックス検知信号をサブ制御装置72に出力する。なお、左側インデックス131の左右方向の幅は、可動役物120の台座部122の左側面がストッパー110に接触するときに、左側インデックス検知センサ117の発光部117aと受光部117bとの間に介在する長さに設定されている。
【0094】
演出制御CPU92は、本実施形態における最大可動ステップ数設定処理において、第1の実施形態と同様に、先ず可動役物120を第1位置で停止させる。
【0095】
次に、演出制御CPU92は、ステッピングモータ103を正転させるパルス信号を出力して、第1位置から可動役物120の左側インデックス131が左側インデックス検知センサ117の発光部117aと受光部117bとの間に介在する位置(本実施形態における第2位置)まで可動体を往動させる。すなわち、演出制御CPU92は、右側インデックス検知センサ112から出力される右側インデックス検知信号を受信するまで、ステッピングモータ103を正転させるパルス信号を出力する。
【0096】
また、演出制御CPU92は、可動役物120を第1位置から第2位置へ往動させるときにステッピングモータ103へ出力したパルス信号のパルス数を、ステッピングモータ103の駆動ステップ数としてカウントする。具体的には、演出制御CPU92は、ステッピングモータ103にパルス信号を1パルス出力する度に、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶する。また、左側インデックス検知信号を受信すると、演出制御CPU92は、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数との差の絶対値が所定値、例えば5以上であるか否かを判定する。例えば、カウントしたステップ数が410ステップで、且つ、デフォルトステップ数が400ステップの場合など、両値の差の絶対値が5以上の場合、カウントしたステップ数から所定のステップ数、本実施形態では1ステップを引いた409ステップを最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に更新して記憶する。両値の差の絶対値が5未満の場合、デフォルトステップ数の400ステップが最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に記憶されている状態を維持する。
【0097】
なお、演出制御CPU92は、最大可動ステップ数設定処理後に、左側インデックス検知センサ117への電源の供給を停止し、オフ状態にする。また、演出制御CPU92は、演出の制御における可動演出ユニット100の駆動制御において、主制御CPU73から送信される変動パターンコマンドに基づいて選択した演出パターンが、可動役物120を第1位置から最大可動位置まで往動させて、その後最大可動位置から第1位置まで復動させる内容の演出パターンであった場合、上記第1の実施形態と同様に押し込みステップ数に最大可動ステップ数を加算したステップ数分ステッピングモータ103を正転させるパルス信号を出力し、その後、ステッピングモータ103を逆転させるパルス信号出力する。したがって、可動演出ユニット100の駆動制御において、可動役物120を最大可動位置に往動させるとき、左側インデックス検知センサ117から出力された左側インデックス検知信号を受信しているか否かの判定に基づいて、ステッピングモータ103の駆動を停止する制御を行わず、ステッピングモータ103を最大可動ステップ数分正転させるパルス信号を出力した後、ステッピングモータ103を逆転させるパルス信号を送信する、という比較的簡単な制御で可動演出ユニット100の駆動を制御することができる。
【0098】
[最大可動ステップ数設定処理]
次に、本実施形態におけるサブ制御装置72の演出制御CPU92が実行する最大可動ステップ数設定処理について、図12のフローチャートを参照して説明する。なお、ステップS11〜ステップS14については、第1の実施形態における最大可動ステップ数設定処理のステップS1〜ステップS4と同様のため説明を省略する。
【0099】
ステップS15では、演出制御CPU92は、ステッピングモータ103を1ステップ分正転させるパルス信号を出力し、可動役物120をX1方向(図5及び図8参照)に往動させ、ステップS16に移行する。
【0100】
ステップS16では、演出制御CPU92は、ステッピングモータ103へ出力したパルス数を、往動するときにステッピングモータ103が駆動したステップ数としてカウントし、具体的には、RAM94のカウント値記憶領域に記憶されているカウント値に1を加算して記憶し、ステップS17に移行する。
【0101】
ステップS17では、左側インデックス検知センサ117から出力された左側インデックス検知信号を受信しているか否かに基づいて、左側インデックス検知センサ117が可動役物120の左側インデックス131を検知しているか否かを判定し、検知している場合(ステップS17:YES)は、ステップS18に移行する。一方、検知していない場合(ステップS17:NO)は、ステップS15に移行する。
【0102】
ステップS18では、カウント値記憶領域に記憶されているカウント値、すなわちカウントしたステップ数とデフォルトステップ数(デフォルト値)との差の絶対値が所定値以上、本実施形態では5以上であるか否かを判定し、所定値以上の場合は、ステップS19に移行し、所定値未満の場合は、本処理を終了する。
【0103】
ステップS19では、カウントしたステップ数から所定のステップ数(所定値)、本実施形態では1ステップを引いたステップ数を最大可動ステップ数としてRAM94の最大可動ステップ数記憶領域に記憶し、本処理を終了する。
【0104】
本実施形態によれば、演出制御CPU92によって、可動体を第1位置から第2位置に往動させるときのステッピングモータ103のステップ数を最大可動ステップ数として、RAM94の最大可動ステップ数記憶領域に記憶することができる。
【0105】
以上、本発明者によってなされた発明を適用した実施形態について説明したが、この実施形態による本発明の開示の一部をなす論述及び図面により本発明は限定されることはない。例えば、上記第1及び第2の実施形態では、演出の制御における可動演出ユニット100の駆動制御の終了時に押し込み処理を実行したが、押し込み処理は省略してもよい。
【0106】
また、上記実施形態では、演出制御CPU92が、最大可動ステップ数設定処理を初期動作の一環として実行する態様を説明したが、演出制御CPU92は、パチンコ機Pが遊技が行われていない待機状態であるときに、最大可動ステップ数設定処理を実行してもよい。また、演出制御CPU92は、遊技機の工場出荷時や、遊技ホールへの取り付け設置時に最大可動ステップ数設定処理を実行してもよい。この場合、サブ制御装置72に不揮発性のRAM(例えば、NVRAM)を装備させ、演出制御CPU92は、最大可動ステップ数設定処理においてカウントしたステップ数を不揮発性のRAMに記憶する。
【0107】
すなわち、これらの実施形態に基づいて当業者等によりなされる他の実施形態、実施例及び運用技術等は全て本発明の範疇に含まれることは勿論であることを付け加えておく。
【符号の説明】
【0108】
72:サブ制御装置、92…演出制御CPU(第1の判定手段、インデックス検知手段、第2の判定手段、第1の駆動制御手段、ステップ数計測手段、第2の駆動制御手段、第3の判定手段)、94…RAM(可動ステップ数記憶手段)、100…可動演出ユニット、103…ステッピングモータ、120…可動役物(可動体)、112…右側インデックス検知センサ(第1の判定手段、インデックス検知手段)、117…左側インデックス検知センサ、128…右側インデックス(インデックス)、P…パチンコ機(遊技機)
【特許請求の範囲】
【請求項1】
第1位置と第2位置とを含む所定の経路に沿って往復移動可能に遊技機本体に支持される可動体と、
ステップ数による回転制御が可能であり、前記可動体に連結されて該可動体を駆動するステッピングモータと、
前記可動体が前記第1位置にあるか否かを判定する第1の判定手段と、
前記可動体が前記第2位置にあるか否かを判定する第2の判定手段と、
前記ステッピングモータの駆動を制御して、前記可動体が前記第1位置にあると前記第1の判定手段が判定してから、前記可動体が前記第2位置にあると前記第2の判定手段が判定するまで、前記可動体を前記所定の経路に沿って往動させ、且つ、前記可動体が前記第2位置にあると前記第2の判定手段が判定してから、前記可動体が前記第1位置にあると前記第1の判定手段が判定するまで、前記可動体を前記所定の経路に沿って復動させる第1の駆動制御手段と、
前記第1の駆動制御手段の制御によって前記可動体が往動又は復動するときの前記ステッピングモータのステップ数をカウントするステップ数計測手段と、
前記ステップ数計測手段が計測したステップ数以下のステップ数を可動ステップ数として記憶する可動ステップ数記憶手段と、
遊技中に前記ステッピングモータの駆動を制御して、前記可動体が前記第1位置にあるとき、前記ステッピングモータを前記可動ステップ数分駆動させ、前記可動体を前記所定の経路に沿って往動させて前記可動体による演出を行う第2の駆動制御手段と、を備える
ことを特徴とする遊技機。
【請求項2】
請求項1に記載の遊技機であって、
前記可動体に設けられて該可動体と一体的に可動するインデックスと、
デフォルトステップ数が予め記憶されているデフォルトステップ数記憶手段と、を備え、
前記第1の判定手段は、前記遊技機本体に固定され、前記第1位置における前記可動体の前記インデックスを検知することによって前記可動体が前記第1位置にあると判定するインデックス検知手段であり、
前記第2の判定手段は、前記インデックス検知手段が前記インデックスを検知している状態から前記第1の駆動制御手段によって前記ステッピングモータが前記デフォルトステップ数分駆動されて前記可動体が前記所定の経路に沿って往動したときに前記可動体が前記第2位置にあると判定し、
前記ステップ数計測手段は、前記第1の駆動制御手段の制御によって前記可動体が復動するときの前記ステッピングモータのステップ数をカウントする
ことを特徴とする遊技機。
【請求項3】
請求項2に記載の遊技機であって、
前記デフォルトステップ数と前記ステップ数計測手段がカウントしたステップ数との差が所定値以上であるか否かを判定する第3の判定手段を備え、
前記可動ステップ数記憶手段は、前記デフォルトステップ数と前記ステップ数計測手段がカウントしたステップ数との差が所定値以上であると前記第3の判定手段が判定したときは、前記ステップ数計測手段がカウントしたステップ数以下のステップ数を可動ステップ数として記憶し、前記デフォルトステップ数と前記ステップ数計測手段がカウントしたステップ数との差が所定値未満であると前記第3の判定手段が判定したときは前記デフォルトステップ数を可動ステップ数として記憶する
ことを特徴とする遊技機。
【請求項1】
第1位置と第2位置とを含む所定の経路に沿って往復移動可能に遊技機本体に支持される可動体と、
ステップ数による回転制御が可能であり、前記可動体に連結されて該可動体を駆動するステッピングモータと、
前記可動体が前記第1位置にあるか否かを判定する第1の判定手段と、
前記可動体が前記第2位置にあるか否かを判定する第2の判定手段と、
前記ステッピングモータの駆動を制御して、前記可動体が前記第1位置にあると前記第1の判定手段が判定してから、前記可動体が前記第2位置にあると前記第2の判定手段が判定するまで、前記可動体を前記所定の経路に沿って往動させ、且つ、前記可動体が前記第2位置にあると前記第2の判定手段が判定してから、前記可動体が前記第1位置にあると前記第1の判定手段が判定するまで、前記可動体を前記所定の経路に沿って復動させる第1の駆動制御手段と、
前記第1の駆動制御手段の制御によって前記可動体が往動又は復動するときの前記ステッピングモータのステップ数をカウントするステップ数計測手段と、
前記ステップ数計測手段が計測したステップ数以下のステップ数を可動ステップ数として記憶する可動ステップ数記憶手段と、
遊技中に前記ステッピングモータの駆動を制御して、前記可動体が前記第1位置にあるとき、前記ステッピングモータを前記可動ステップ数分駆動させ、前記可動体を前記所定の経路に沿って往動させて前記可動体による演出を行う第2の駆動制御手段と、を備える
ことを特徴とする遊技機。
【請求項2】
請求項1に記載の遊技機であって、
前記可動体に設けられて該可動体と一体的に可動するインデックスと、
デフォルトステップ数が予め記憶されているデフォルトステップ数記憶手段と、を備え、
前記第1の判定手段は、前記遊技機本体に固定され、前記第1位置における前記可動体の前記インデックスを検知することによって前記可動体が前記第1位置にあると判定するインデックス検知手段であり、
前記第2の判定手段は、前記インデックス検知手段が前記インデックスを検知している状態から前記第1の駆動制御手段によって前記ステッピングモータが前記デフォルトステップ数分駆動されて前記可動体が前記所定の経路に沿って往動したときに前記可動体が前記第2位置にあると判定し、
前記ステップ数計測手段は、前記第1の駆動制御手段の制御によって前記可動体が復動するときの前記ステッピングモータのステップ数をカウントする
ことを特徴とする遊技機。
【請求項3】
請求項2に記載の遊技機であって、
前記デフォルトステップ数と前記ステップ数計測手段がカウントしたステップ数との差が所定値以上であるか否かを判定する第3の判定手段を備え、
前記可動ステップ数記憶手段は、前記デフォルトステップ数と前記ステップ数計測手段がカウントしたステップ数との差が所定値以上であると前記第3の判定手段が判定したときは、前記ステップ数計測手段がカウントしたステップ数以下のステップ数を可動ステップ数として記憶し、前記デフォルトステップ数と前記ステップ数計測手段がカウントしたステップ数との差が所定値未満であると前記第3の判定手段が判定したときは前記デフォルトステップ数を可動ステップ数として記憶する
ことを特徴とする遊技機。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−99479(P2013−99479A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−245905(P2011−245905)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000154679)株式会社平和 (1,976)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000154679)株式会社平和 (1,976)
【Fターム(参考)】
[ Back to top ]