
遊星歯車の不等配置検出方法および不等配置検出装置

【課題】遊星歯車機構の品質管理を徹底するべく、容易、かつ、確実に、プラネタリギアの不等配置を検出することができる不等配置検出方法および不等配置検出装置を提供する。
【解決手段】検出対象たる遊星歯車機構2bを回転駆動した際の、該遊星歯車機構2bの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す波形データを算出し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出する。
【解決手段】検出対象たる遊星歯車機構2bを回転駆動した際の、該遊星歯車機構2bの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す波形データを算出し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遊星歯車の不等配置検出方法および不等配置検出装置の技術に関する。
【背景技術】
【0002】
従来、遊星歯車機構を構成するプラネタリギア(遊星歯車)の不等配置を検出する方法としては、作業者がプラネタリギアの配置を目視で確認する方法がある。
しかしながら、作業者が目視でプラネタリギアの配置を確認する方法では、作業者の体調や確認作業に対する作業者の習熟度等によっては、プラネタリギアの不等配置を見逃してしまうことが懸念され、不具合のある遊星歯車機構が次工程に流出する可能性があることから、品質管理を徹底することが困難であるという問題があった。
【0003】
また従来、遊星歯車機構を構成するプラネタリギアの不等配置を検出する方法としては、プラネタリギアの配置状況をCCDカメラ等で撮像して、撮像データを画像処理することによって、光学的手法によって、不等配置を検出する方法が知られており、以下に示す特許文献1にその技術が開示され公知となっている。
【0004】
しかしながら、特許文献1に開示されている従来技術では、環境(周囲の明るさ、光の強さ、CCDカメラのセッティング条件等)の状態によって、容易に判定結果が変わってしまうことから、誤検出の可能性があった。また検出装置の設定に注意を要するとともに、周辺環境の管理にも注意を要することから、運用が難しいという問題もあった。
【特許文献1】特開平7−325040号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、係る現状を鑑みてなされたものであり、遊星歯車機構の品質管理を徹底するべく、容易、かつ、確実に、プラネタリギアの不等配置を検出することができる不等配置検出装置および不等配置検出方法を提供することを課題としている。
【課題を解決するための手段】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0007】
即ち、請求項1においては、プラネタリギアの配置が適当であることが既知である基準遊星歯車機構を回転駆動した際の、該基準遊星歯車機構の入力軸、または、出力軸の回転量と、前記入力軸、または、前記出力軸に作用するトルクとの相間を表す基準波形データを算出し、該基準波形データにおいてデータ処理の対象とする処理対象区間を設定するとともに、該処理対象区間における前記基準波形データに対して基準線形近似線を算出し、さらに、該基準線形近似線に平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線と基準下限閾値線を設定し、前記基準線形近似線と前記基準上限閾値線との離間幅である上限離間幅と、前記基準線形近似線と前記基準下限閾値線との離間幅である下限離間幅と、を予め設定しておき、プラネタリギアの配置が不明である検出対象たる遊星歯車機構を回転駆動した際の、該遊星歯車機構の入力軸、または、出力軸の回転量と、前記入力軸、または、前記出力軸に作用するトルクとの相間を表す波形データを算出し、前記処理対象区間における前記波形データに対して線形近似線を算出し、さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【0008】
請求項2においては、前記処理対象区間を細分化して細分化処理対象区間を設定し、前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、前記波形データにおいて前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【0009】
請求項3においては、入力軸、または、出力軸の回転量を検出する回転量検出部と、前記入力軸、または、前記出力軸に作用するトルクを検出するトルク検出部と、前記回転量検出部による回転量の検出結果と前記トルク検出部によるトルクの検出結果が入力される演算装置と、を備え、前記演算装置には、プラネタリギアの配置が適当である基準遊星歯車機構から検出した回転量とトルクとの相間を表す基準波形データにおいて、データ処理の対象として設定される処理対象区間と、該処理対象区間における前記基準波形データを線形近似して算出した基準線形近似線に対して平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線および基準下限閾値線の前記基準線形近似線との離間幅である上限離間幅および下限離間幅と、が予め記憶され、プラネタリギアの配置が不明である検出対象たる遊星歯車機構から、前記回転量検出部によって、前記遊星歯車機構の入力軸、または、出力軸の回転量を検出するとともに、前記トルク検出部によって、前記入力軸、または、前記出力軸に作用するトルクを検出し、前記演算装置によって、前記遊星歯車機構の回転量とトルクとの相関を表す波形データを生成し、前記処理対象区間における前記波形データに対して線形近似線を算出し、さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【0010】
請求項4においては、前記処理対象区間を細分化して細分化処理対象区間を設定し、前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、前記波形データが前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【発明の効果】
【0011】
本発明の効果として、以下に示すような効果を奏する。
【0012】
請求項1においては、プラネタリギアの不等配置を容易に検出することができる。
【0013】
請求項2においては、プラネタリギアの不等配置を精度良く検出することができる。
【0014】
請求項3においては、プラネタリギアの不等配置を容易に検出することができる。
【0015】
請求項4においては、プラネタリギアの不等配置を精度良く検出することができる。
【発明を実施するための最良の形態】
【0016】
次に、発明の実施の形態を説明する。
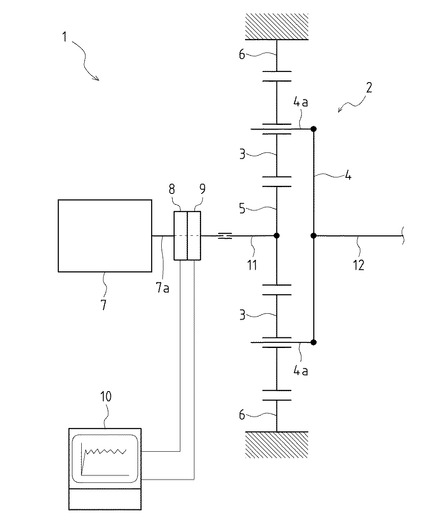
まず始めに、本発明の一実施例に係る不等配置検出装置の全体構成について、図1を用いて説明をする。図1は本発明の一実施例に係る不等配置検出装置の全体構成を示す模式図である。
【0017】
図1に示す如く、本発明の一実施例に係る不等配置検出装置1は、遊星歯車機構2におけるプラネタリギア3・3・・・が不等配置となっているか否かを検出するための装置であり、モータ7、回転量検出部8、トルク検出部9、演算装置10等によって構成されている。
【0018】
遊星歯車機構2は、不等配置検出装置1によって不等配置を検出する対象となる遊星歯車機構の一例であり、プラネタリギア3・3・・・、プラネタリキャリア4、サンギア5、アウターギア6、入力軸11、出力軸12等によって構成されている。そして、プラネタリギア3・3・・・は、プラネタリキャリア4が有するキャリア軸4a・4a・・・によって回転可能に支持されている。
尚、本実施例で示す遊星歯車機構2では、サンギア5が入力部となるため、サンギア5を、入力軸11上に該入力軸11の軸心とサンギア5の軸心とを一致させた状態で固設している。また、本実施例で示す遊星歯車機構2では、プラネタリキャリア4が出力部となるため、プラネタリキャリア4を、出力軸12上に該出力軸12の軸心とプラネタリキャリア4の軸心とを一致させた状態で固設している。
【0019】
このような構成により、本実施例で示す遊星歯車機構2では、入力軸11からサンギア5に入力された回転力が、プラネタリギア3・3・・・およびアウターギア6等を介することによって変速されて、一定の変速比で変速された回転力が、プラネタリキャリア4から出力軸12に出力される構成としている。
尚、遊星歯車機構は、どの部位を入力部とし、そして、どの部位を出力部とするかは所望する用途・能力等によって、適宜選択されるものであり、種々の構成態様を取り得るものである。このため、本発明の適用に係る遊星歯車機構の構成は、本実施例の遊星歯車機構2に示す構成に限定するものではなく、種々の構成態様の遊星歯車機構に対して本発明を適用することが可能である。
【0020】
モータ7は、通電することによって、該モータ7が備えるモータ軸7aを回転駆動することができる装置であり、不等配置検出装置1の駆動源を構成している。モータ軸7aには、入力軸11が接続されており、モータ軸7aの軸心と入力軸11の軸心とを一致させる構成としている。このような構成により、モータ7に通電することによって、モータ軸7aが回転駆動され、これにより、入力軸11を介してサンギア5を回転駆動することができる構成としている。
【0021】
回転量検出部8はモータ軸7a(即ち、入力軸11)の回転量を検出することができるセンサであり、回転量が「0」である状態から、モータ軸7aが回転した量を機械的あるいは光学的に検出して、累積的に検出することができるものである。そして、回転量検出部8は演算装置10と接続されている。
尚、本実施例では、図1に示すように回転量検出部8がモータ軸7a上に配設され、機械的あるいは光学的に回転量を検出する構成を例示しているが、モータ7のコントローラ等から取得される信号から電気的にモータ軸7aの回転量を検出する構成とすることも可能であり、回転量検出部8の態様は適宜選択することが可能である。そして、回転量検出部8によって検出された回転量の情報(データ)は、演算装置10に入力される。
【0022】
トルク検出部9は、モータ軸7a(即ち、入力軸11)に作用するトルクを検出することができるセンサであり、演算装置10に接続されている。
尚、本実施例では、図1に示すようにモータ軸7a上にトルク検出部9を別途配設してトルクを検出する構成を例示しているが、トルク検出部9を別途設けることなく、モータ7に通電される電流の負荷状況から電気的にモータ軸7aに作用するトルクを検出する構成とすることも可能であり、トルク検出部9の態様は適宜選択することが可能である。そして、トルク検出部9によって検出されたトルクのデータは、演算装置10に入力される。
【0023】
また、本実施例では、図1に示すように回転量検出部8およびトルク検出部9がモータ軸7a上に配設され、入力軸11側の回転量およびトルクを検出する構成を例示しているが、回転量検出部8およびトルク検出部9を出力軸12上に配設し、出力軸12側の回転量およびトルクを検出する構成とすることも可能である。
【0024】
演算装置10は、PC(パーソナルコンピュータ)等によって構成され、入力された情報(データ)を演算処理したり、演算処理したデータを記憶しておいたりすることができるものであり、回転量検出部8およびトルク検出部9が接続されている。そして、演算装置10には、回転量検出部8により検出されたモータ軸7aの回転量のデータと、トルク検出部9により検出されたモータ軸7aに作用するトルクのデータが入力される。
【0025】
そして、演算装置10では、各部8・9から入力された回転量およびトルクのデータを処理して、回転量とトルクの相関データが算出される。ここで算出された相関データは波形データとして図形的に表すことができる。尚、回転量とトルクの相関データは必ずしも波形データとして図形化する必要はなく、回転量とトルクの相関を示す数値データとして算出することも可能である。
【0026】
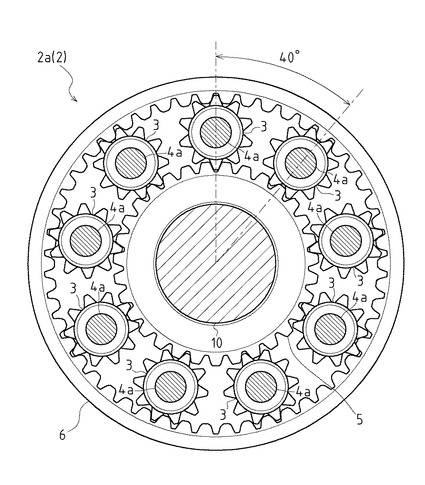
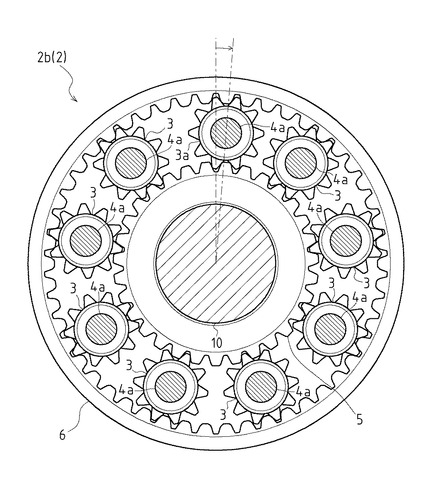
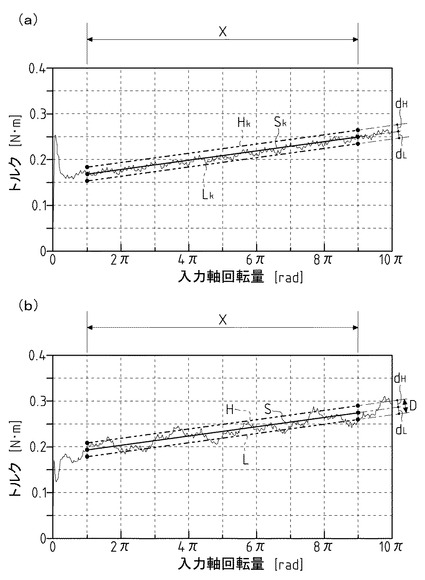
次に、上限閾値および下限閾値の設定状況について、図2〜図4を用いて説明をする。図2はプラネタリギアの配置が適当である遊星歯車機構を示す模式図、図3はプラネタリギアの配置が不等配置である遊星歯車機構を示す模式図、図4は入力軸の回転量と入力軸に作用するトルクの相関を示す図であって、特に(a)はプラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)はプラネタリギアの配置が不等配置である遊星歯車機構に係る相関図である。
【0027】
図2には、プラネタリギア3・3・・・がプラネタリキャリア4のキャリア軸4a・4a・・・上に適切に配置された遊星歯車機構2aを例示している。本実施例に示す遊星歯車機構2aでは、9個のプラネタリギア3・3・・・が、40度ずつ位相を異ならせて均等な位置に配設(9等配)されている。
尚、本発明に係る不等配置検出装置および検出方法は、適用される遊星歯車機構が有するプラネタリギアの個数によって限定されるものではない。
【0028】
まず、係る構成である遊星歯車機構2aを不等配置検出装置1に装着する。具体的には、入力軸11をモータ軸7aと接続し、アウターギア6を不等配置検出装置1に対して固定して、図1に示すような配置構成とする。
【0029】
そして、モータ7を駆動して、遊星歯車機構2aを回転駆動させつつ、回転量検出部8によってモータ軸7aの回転量を検出し、かつ、トルク検出部9によって、モータ軸7aに作用するトルクを検出する。そして、各部8・9によって検出した回転量およびトルクのデータは演算装置10に入力される。
【0030】
そして、演算装置10によって、入力された回転量とトルクのデータに基づいて、回転量とトルクの相関データが算出される。ここで、プラネタリギア3・3・・・の配置が適当である遊星歯車機構2aについての相関データは、図4(a)に示すような波形データ(正常波形)として表される。
【0031】
図4(a)に示す如く、波形データは、遊星歯車機構2aの回転初期の段階においては、乱れているため、データの解析に適した部位を抽出するために、処理対象区間Xを設定している。
【0032】
そして、処理対象区間Xにおける相関データを線形近似することによって、基準線形近似線Skを算出する。尚、この基準線形近似線Skは、波形データから算出することが可能であり、あるいは、数値データから直接算出することも可能である。
【0033】
そして、処理対象区間Xにおいて、基準線形近似線Skと平行な線分である基準上限閾値線Hkと基準下限閾値線Lkを規定する。係る基準上限閾値線Hkと基準下限閾値線Lkは、処理対象区間Xにおける全ての波形データが、基準上限閾値線Hkと基準下限閾値線Lkの間に内包される位置となるように、基準線形近似線Skとの上限離間幅dHと下限離間幅dLを設定することによって規定される。
この上限離間幅dHおよび下限離間幅dLの値は、プラネタリギア3・3・・・の不等配置を検出するために適当な値を適宜余裕を見込んで設定している。
【0034】
このようにしてプラネタリギア3・3・・・の配置が適当である遊星歯車機構2aについて算出した基準線形近似線Skを基準として上限離間幅dHと下限離間幅dLを設定する。
そして、演算装置10には、上限離間幅dH、下限離間幅dLおよび処理対象区間X等のデータが予め記憶される。
【0035】
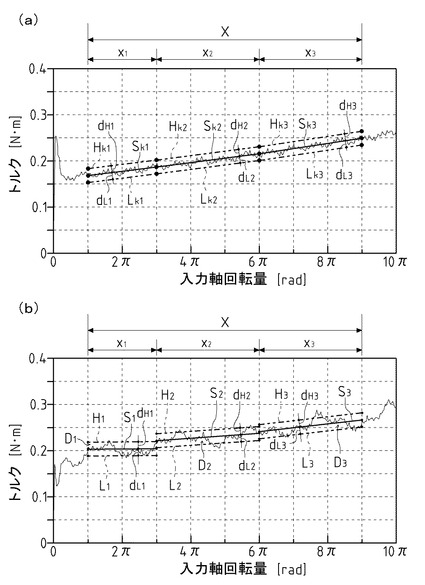
次に、本発明の一実施例に係る不等配置検出装置による遊星歯車の不等配置の検出方法について、図3〜図5を用いて説明をする。図5は処理対象区間を細分化した場合における入力軸の回転量と入力軸に作用するトルクの相関を示す図であって、特に(a)はプラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)はプラネタリギアの配置が不等配置である遊星歯車機構に係る相関図である。
【0036】
図3には、キャリア軸4a・4a・・・上のプラネタリギア3・3・・・が不等配置となっている遊星歯車機構2bを例示している。本実施例に示す遊星歯車機構2bでは、9個のプラネタリギア3・3・・・が、40度ずつ位相を異ならせて均等な位置に配設(9等配)されるべきところが、そのうち一つのプラネタリギア3aだけ位相がズレた状態で配設されている。
【0037】
そして、係る構成である遊星歯車機構2bを不等配置検出装置1に装着して、モータ7を駆動して、遊星歯車機構2bを回転駆動させつつ、各部8・9によってモータ軸7aの回転量をおよびモータ軸7aに作用するトルクを検出する。そして、各部8・9によって検出した回転量およびトルクのデータが演算装置10に入力される。
【0038】
そして、演算装置10によって、入力された回転量とトルクのデータに基づいて、回転量とトルクの相関データが算出される。ここで、プラネタリギア3・3・・・が不等配置である遊星歯車機構2bについての相関データは、図4(b)に示すような波形データ(異常波形)として表される。
【0039】
次に、図4(b)に示す如く、算出された相関データ(波形データ)の処理対象区間Xにおいて、線形近似線Sを算出する。そして、この線形近似線Sを基準として、演算装置10に予め記憶されている上限離間幅dHと下限離間幅dLを用いて、上限閾値線Hおよび下限閾値線Lを設定し、線形近似線Sに対する良品範囲Dを規定する。
すると、プラネタリギア3・3・・・が不等配置となっている遊星歯車機構2の場合、回転量とトルクの相関を示す波形データは、振幅が大きくなる傾向があるため、波形データが良品範囲Dからはみ出す部位が出現する。
【0040】
このように、処理対象区間Xについて算出した波形データにおいて、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dからはみ出す部位が存在している場合には、プラネタリギア3・3・・・が不等配置であると判断するようにしている。
【0041】
さらに、図5(a)に示す如く、処理対象区間Xを細分化して、細分化処理対象区間x1・x2・x3を設定し、各処理対象区間x1・x2・x3ごとに基準線形近似線Sk1・Sk2・Sk3を算出し、それぞれに基準上限閾値線Hk1・Hk2・Hk3および基準下限閾値線Lk1・Lk2・Lk3を規定して、各処理対象区間x1・x2・x3ごと各上限離間幅dH1・dH2・dH3および各下限離間幅dL1・dL2・dL3を設定することが可能である。
【0042】
この場合、図5(b)に示す如く、不等配置の検出対象から検出した波形データに対しても、処理対象区間Xを細分化して、細分化処理対象区間x1・x2・x3を設定し、各処理対象区間x1・x2・x3ごとに線形近似線S1・S2・S3を算出し、各処理対象区間x1・x2・x3ごと各上限離間幅dH1・dH2・dH3および各下限離間幅dL1・dL2・dL3を用いて、それぞれに上限閾値線H1・H2・H3および下限閾値線L1・L2・L3を設定し、細分化処理対象区間x1・x2・x3ごとに良品範囲D1・D2・D3を設定することが可能となる。
【0043】
このように処理対象区間Xを細分化することによって、良品範囲D1・D2・D3をより狭く設定することが可能となり、不等配置検出装置1によってプラネタリギア3・3・・・の不等配置を検出する精度をより向上させることができる。
【0044】
また、図5(a)に示すように、プラネタリギア3・3・・・の配置が適切である場合には、細分化処理対象区間x1・x2・x3ごとに求めた各基準線形近似線Sk1・Sk2・Sk3の傾きは全て略一致する傾向がある。一方、図5(b)に示すように、プラネタリギア3・3・・・の不等配置である場合には、細分化処理対象区間x1・x2・x3ごとに求めた各線形近似線S1・S2・S3の傾きはばらつく傾向がある。
【0045】
この傾向を利用して、細分化処理対象区間x1・x2・x3ごとに求めた各線形近似線S1・S2・S3の傾きの差異やばらつき等を考慮する(即ち、判断基準に加える)ことによって、不等配置検出装置1によって、プラネタリギア3・3・・・の不等配置をさらに容易に検出するとともに、検出する精度をさらに向上させることが可能である。
【0046】
即ち、本発明の一実施例に係る不等配置検出装置1は、プラネタリギア3・3・・・の配置が適当であることが既知である基準遊星歯車機構たる遊星歯車機構2aから、該遊星歯車機構2aの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す基準波形データを算出し、該基準波形データにおいてデータ処理の対象とする処理対象区間Xを設定するとともに、該処理対象区間Xにおける前記基準波形データに対して基準線形近似線Skを算出し、さらに、該基準線形近似線Skに平行な2本の線分であって、該2本の線分の間に処理対象区間Xにおける前記基準波形データを内包する位置に設定される基準上限閾値線Hkと基準下限閾値線Lkを設定し、基準線形近似線Skと基準上限閾値線Hkとの離間幅である上限離間幅dHと、基準線形近似線Skと基準下限閾値線Lkとの離間幅である下限離間幅dLと、を予め設定しておき、プラネタリギア3・3・・・の配置が不明である検出対象たる遊星歯車機構2bを回転駆動した際の、該遊星歯車機構2bの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す波形データを算出し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出するものである。
【0047】
また、本発明の一実施例に係る不等配置検出装置1による不等配置検出方法は、入力軸11、または、出力軸12の回転量を検出する回転量検出部8と、入力軸11、または、出力軸12に作用するトルクを検出するトルク検出部9と、回転量検出部8による回転量の検出結果とトルク検出部9によるトルクの検出結果が入力される演算装置10と、を備え、演算装置10には、プラネタリギア3・3・・・の配置が適当である基準となる遊星歯車機構たる遊星歯車機構2aから検出した回転量とトルクとの相間を表す基準波形データにおいて、データ処理の対象として設定される処理対象区間Xと、該処理対象区間Xにおける前記基準波形データを線形近似して算出した基準線形近似線Skに対して平行な2本の線分であって、該2本の線分の間に処理対象区間Xにおける前記基準波形データを内包する位置に設定される基準上限閾値線Hkおよび基準下限閾値線Lkの基準線形近似線Skとの離間幅である上限離間幅dHおよび下限離間幅dLと、が予め記憶され、プラネタリギア3・3・・・の配置が不明である検出対象たる遊星歯車機構2bから、回転量検出部8によって、遊星歯車機構2bの入力軸11、または、出力軸12の回転量を検出するとともに、トルク検出部9によって、入力軸11、または、出力軸12に作用するトルクを検出し、演算装置10によって、遊星歯車機構2bの回転量とトルクとの相関を表す波形データを生成し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出するものである。
このような構成により、プラネタリギア3・3・・・の不等配置を容易に検出することができる。
【0048】
また、本発明の一実施例に係る不等配置検出装置1および不等配置検出装置1による不等配置検出方法では、処理対象区間Xを細分化して細分化処理対象区間x1・x2・x3を設定し、細分化処理対象区間x1・x2・x3ごとに前記基準波形データの基準線形近似線Sk1・Sk2・Sk3を算出するとともに、前記波形データを細分化処理対象区間x1・x2・x3ごとに各良品範囲D1・D2・D3と比較し、前記波形データにおいて各良品範囲D1・D2・D3から外れている部位を有する細分化処理対象区間x1・x2・x3が存在していることをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出するものである。
このような構成により、プラネタリギア3・3・・・の不等配置を精度良く検出することができる。
【0049】
尚、本実施例では、遊星歯車機構の入力軸あるいは出力軸の、回転量とトルクの相関からプラネタリギアの不等配置を検出する構成としているが、例えば、入力軸の回転量に応じて出力軸が軸心方向に変位する構成の遊星歯車機構においては、不等配置検出装置によって、入力軸のトルクと出力軸に作用する軸心方向の荷重を検出し、トルクと荷重の相関を用いてプラネタリギアの不等配置を検出する構成とすることも可能である。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施例に係る不等配置検出装置の全体構成を示す模式図。
【図2】プラネタリギアの配置が適当である遊星歯車機構を示す模式図。
【図3】プラネタリギアの配置が不等配置である遊星歯車機構を示す模式図。
【図4】入力軸の回転量と入力軸に作用するトルクの相関を示す図、(a)プラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)プラネタリギアの配置が不等配置である遊星歯車機構に係る相関図。
【図5】処理対象区間を細分化した場合における入力軸の回転量と入力軸に作用するトルクの相関を示す図、(a)プラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)プラネタリギアの配置が不等配置である遊星歯車機構に係る相関図。
【符号の説明】
【0051】
1 不等配置検出装置
2 遊星歯車機構
3 プラネタリギア
4 プラネタリキャリア
8 回転量検出部
9 トルク検出部
10 演算装置
11 入力軸
12 出力軸
【技術分野】
【0001】
本発明は、遊星歯車の不等配置検出方法および不等配置検出装置の技術に関する。
【背景技術】
【0002】
従来、遊星歯車機構を構成するプラネタリギア(遊星歯車)の不等配置を検出する方法としては、作業者がプラネタリギアの配置を目視で確認する方法がある。
しかしながら、作業者が目視でプラネタリギアの配置を確認する方法では、作業者の体調や確認作業に対する作業者の習熟度等によっては、プラネタリギアの不等配置を見逃してしまうことが懸念され、不具合のある遊星歯車機構が次工程に流出する可能性があることから、品質管理を徹底することが困難であるという問題があった。
【0003】
また従来、遊星歯車機構を構成するプラネタリギアの不等配置を検出する方法としては、プラネタリギアの配置状況をCCDカメラ等で撮像して、撮像データを画像処理することによって、光学的手法によって、不等配置を検出する方法が知られており、以下に示す特許文献1にその技術が開示され公知となっている。
【0004】
しかしながら、特許文献1に開示されている従来技術では、環境(周囲の明るさ、光の強さ、CCDカメラのセッティング条件等)の状態によって、容易に判定結果が変わってしまうことから、誤検出の可能性があった。また検出装置の設定に注意を要するとともに、周辺環境の管理にも注意を要することから、運用が難しいという問題もあった。
【特許文献1】特開平7−325040号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、係る現状を鑑みてなされたものであり、遊星歯車機構の品質管理を徹底するべく、容易、かつ、確実に、プラネタリギアの不等配置を検出することができる不等配置検出装置および不等配置検出方法を提供することを課題としている。
【課題を解決するための手段】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0007】
即ち、請求項1においては、プラネタリギアの配置が適当であることが既知である基準遊星歯車機構を回転駆動した際の、該基準遊星歯車機構の入力軸、または、出力軸の回転量と、前記入力軸、または、前記出力軸に作用するトルクとの相間を表す基準波形データを算出し、該基準波形データにおいてデータ処理の対象とする処理対象区間を設定するとともに、該処理対象区間における前記基準波形データに対して基準線形近似線を算出し、さらに、該基準線形近似線に平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線と基準下限閾値線を設定し、前記基準線形近似線と前記基準上限閾値線との離間幅である上限離間幅と、前記基準線形近似線と前記基準下限閾値線との離間幅である下限離間幅と、を予め設定しておき、プラネタリギアの配置が不明である検出対象たる遊星歯車機構を回転駆動した際の、該遊星歯車機構の入力軸、または、出力軸の回転量と、前記入力軸、または、前記出力軸に作用するトルクとの相間を表す波形データを算出し、前記処理対象区間における前記波形データに対して線形近似線を算出し、さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【0008】
請求項2においては、前記処理対象区間を細分化して細分化処理対象区間を設定し、前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、前記波形データにおいて前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【0009】
請求項3においては、入力軸、または、出力軸の回転量を検出する回転量検出部と、前記入力軸、または、前記出力軸に作用するトルクを検出するトルク検出部と、前記回転量検出部による回転量の検出結果と前記トルク検出部によるトルクの検出結果が入力される演算装置と、を備え、前記演算装置には、プラネタリギアの配置が適当である基準遊星歯車機構から検出した回転量とトルクとの相間を表す基準波形データにおいて、データ処理の対象として設定される処理対象区間と、該処理対象区間における前記基準波形データを線形近似して算出した基準線形近似線に対して平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線および基準下限閾値線の前記基準線形近似線との離間幅である上限離間幅および下限離間幅と、が予め記憶され、プラネタリギアの配置が不明である検出対象たる遊星歯車機構から、前記回転量検出部によって、前記遊星歯車機構の入力軸、または、出力軸の回転量を検出するとともに、前記トルク検出部によって、前記入力軸、または、前記出力軸に作用するトルクを検出し、前記演算装置によって、前記遊星歯車機構の回転量とトルクとの相関を表す波形データを生成し、前記処理対象区間における前記波形データに対して線形近似線を算出し、さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【0010】
請求項4においては、前記処理対象区間を細分化して細分化処理対象区間を設定し、前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、前記波形データが前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、前記遊星歯車機構を構成するプラネタリギアの不等配置を検出するものである。
【発明の効果】
【0011】
本発明の効果として、以下に示すような効果を奏する。
【0012】
請求項1においては、プラネタリギアの不等配置を容易に検出することができる。
【0013】
請求項2においては、プラネタリギアの不等配置を精度良く検出することができる。
【0014】
請求項3においては、プラネタリギアの不等配置を容易に検出することができる。
【0015】
請求項4においては、プラネタリギアの不等配置を精度良く検出することができる。
【発明を実施するための最良の形態】
【0016】
次に、発明の実施の形態を説明する。
まず始めに、本発明の一実施例に係る不等配置検出装置の全体構成について、図1を用いて説明をする。図1は本発明の一実施例に係る不等配置検出装置の全体構成を示す模式図である。
【0017】
図1に示す如く、本発明の一実施例に係る不等配置検出装置1は、遊星歯車機構2におけるプラネタリギア3・3・・・が不等配置となっているか否かを検出するための装置であり、モータ7、回転量検出部8、トルク検出部9、演算装置10等によって構成されている。
【0018】
遊星歯車機構2は、不等配置検出装置1によって不等配置を検出する対象となる遊星歯車機構の一例であり、プラネタリギア3・3・・・、プラネタリキャリア4、サンギア5、アウターギア6、入力軸11、出力軸12等によって構成されている。そして、プラネタリギア3・3・・・は、プラネタリキャリア4が有するキャリア軸4a・4a・・・によって回転可能に支持されている。
尚、本実施例で示す遊星歯車機構2では、サンギア5が入力部となるため、サンギア5を、入力軸11上に該入力軸11の軸心とサンギア5の軸心とを一致させた状態で固設している。また、本実施例で示す遊星歯車機構2では、プラネタリキャリア4が出力部となるため、プラネタリキャリア4を、出力軸12上に該出力軸12の軸心とプラネタリキャリア4の軸心とを一致させた状態で固設している。
【0019】
このような構成により、本実施例で示す遊星歯車機構2では、入力軸11からサンギア5に入力された回転力が、プラネタリギア3・3・・・およびアウターギア6等を介することによって変速されて、一定の変速比で変速された回転力が、プラネタリキャリア4から出力軸12に出力される構成としている。
尚、遊星歯車機構は、どの部位を入力部とし、そして、どの部位を出力部とするかは所望する用途・能力等によって、適宜選択されるものであり、種々の構成態様を取り得るものである。このため、本発明の適用に係る遊星歯車機構の構成は、本実施例の遊星歯車機構2に示す構成に限定するものではなく、種々の構成態様の遊星歯車機構に対して本発明を適用することが可能である。
【0020】
モータ7は、通電することによって、該モータ7が備えるモータ軸7aを回転駆動することができる装置であり、不等配置検出装置1の駆動源を構成している。モータ軸7aには、入力軸11が接続されており、モータ軸7aの軸心と入力軸11の軸心とを一致させる構成としている。このような構成により、モータ7に通電することによって、モータ軸7aが回転駆動され、これにより、入力軸11を介してサンギア5を回転駆動することができる構成としている。
【0021】
回転量検出部8はモータ軸7a(即ち、入力軸11)の回転量を検出することができるセンサであり、回転量が「0」である状態から、モータ軸7aが回転した量を機械的あるいは光学的に検出して、累積的に検出することができるものである。そして、回転量検出部8は演算装置10と接続されている。
尚、本実施例では、図1に示すように回転量検出部8がモータ軸7a上に配設され、機械的あるいは光学的に回転量を検出する構成を例示しているが、モータ7のコントローラ等から取得される信号から電気的にモータ軸7aの回転量を検出する構成とすることも可能であり、回転量検出部8の態様は適宜選択することが可能である。そして、回転量検出部8によって検出された回転量の情報(データ)は、演算装置10に入力される。
【0022】
トルク検出部9は、モータ軸7a(即ち、入力軸11)に作用するトルクを検出することができるセンサであり、演算装置10に接続されている。
尚、本実施例では、図1に示すようにモータ軸7a上にトルク検出部9を別途配設してトルクを検出する構成を例示しているが、トルク検出部9を別途設けることなく、モータ7に通電される電流の負荷状況から電気的にモータ軸7aに作用するトルクを検出する構成とすることも可能であり、トルク検出部9の態様は適宜選択することが可能である。そして、トルク検出部9によって検出されたトルクのデータは、演算装置10に入力される。
【0023】
また、本実施例では、図1に示すように回転量検出部8およびトルク検出部9がモータ軸7a上に配設され、入力軸11側の回転量およびトルクを検出する構成を例示しているが、回転量検出部8およびトルク検出部9を出力軸12上に配設し、出力軸12側の回転量およびトルクを検出する構成とすることも可能である。
【0024】
演算装置10は、PC(パーソナルコンピュータ)等によって構成され、入力された情報(データ)を演算処理したり、演算処理したデータを記憶しておいたりすることができるものであり、回転量検出部8およびトルク検出部9が接続されている。そして、演算装置10には、回転量検出部8により検出されたモータ軸7aの回転量のデータと、トルク検出部9により検出されたモータ軸7aに作用するトルクのデータが入力される。
【0025】
そして、演算装置10では、各部8・9から入力された回転量およびトルクのデータを処理して、回転量とトルクの相関データが算出される。ここで算出された相関データは波形データとして図形的に表すことができる。尚、回転量とトルクの相関データは必ずしも波形データとして図形化する必要はなく、回転量とトルクの相関を示す数値データとして算出することも可能である。
【0026】
次に、上限閾値および下限閾値の設定状況について、図2〜図4を用いて説明をする。図2はプラネタリギアの配置が適当である遊星歯車機構を示す模式図、図3はプラネタリギアの配置が不等配置である遊星歯車機構を示す模式図、図4は入力軸の回転量と入力軸に作用するトルクの相関を示す図であって、特に(a)はプラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)はプラネタリギアの配置が不等配置である遊星歯車機構に係る相関図である。
【0027】
図2には、プラネタリギア3・3・・・がプラネタリキャリア4のキャリア軸4a・4a・・・上に適切に配置された遊星歯車機構2aを例示している。本実施例に示す遊星歯車機構2aでは、9個のプラネタリギア3・3・・・が、40度ずつ位相を異ならせて均等な位置に配設(9等配)されている。
尚、本発明に係る不等配置検出装置および検出方法は、適用される遊星歯車機構が有するプラネタリギアの個数によって限定されるものではない。
【0028】
まず、係る構成である遊星歯車機構2aを不等配置検出装置1に装着する。具体的には、入力軸11をモータ軸7aと接続し、アウターギア6を不等配置検出装置1に対して固定して、図1に示すような配置構成とする。
【0029】
そして、モータ7を駆動して、遊星歯車機構2aを回転駆動させつつ、回転量検出部8によってモータ軸7aの回転量を検出し、かつ、トルク検出部9によって、モータ軸7aに作用するトルクを検出する。そして、各部8・9によって検出した回転量およびトルクのデータは演算装置10に入力される。
【0030】
そして、演算装置10によって、入力された回転量とトルクのデータに基づいて、回転量とトルクの相関データが算出される。ここで、プラネタリギア3・3・・・の配置が適当である遊星歯車機構2aについての相関データは、図4(a)に示すような波形データ(正常波形)として表される。
【0031】
図4(a)に示す如く、波形データは、遊星歯車機構2aの回転初期の段階においては、乱れているため、データの解析に適した部位を抽出するために、処理対象区間Xを設定している。
【0032】
そして、処理対象区間Xにおける相関データを線形近似することによって、基準線形近似線Skを算出する。尚、この基準線形近似線Skは、波形データから算出することが可能であり、あるいは、数値データから直接算出することも可能である。
【0033】
そして、処理対象区間Xにおいて、基準線形近似線Skと平行な線分である基準上限閾値線Hkと基準下限閾値線Lkを規定する。係る基準上限閾値線Hkと基準下限閾値線Lkは、処理対象区間Xにおける全ての波形データが、基準上限閾値線Hkと基準下限閾値線Lkの間に内包される位置となるように、基準線形近似線Skとの上限離間幅dHと下限離間幅dLを設定することによって規定される。
この上限離間幅dHおよび下限離間幅dLの値は、プラネタリギア3・3・・・の不等配置を検出するために適当な値を適宜余裕を見込んで設定している。
【0034】
このようにしてプラネタリギア3・3・・・の配置が適当である遊星歯車機構2aについて算出した基準線形近似線Skを基準として上限離間幅dHと下限離間幅dLを設定する。
そして、演算装置10には、上限離間幅dH、下限離間幅dLおよび処理対象区間X等のデータが予め記憶される。
【0035】
次に、本発明の一実施例に係る不等配置検出装置による遊星歯車の不等配置の検出方法について、図3〜図5を用いて説明をする。図5は処理対象区間を細分化した場合における入力軸の回転量と入力軸に作用するトルクの相関を示す図であって、特に(a)はプラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)はプラネタリギアの配置が不等配置である遊星歯車機構に係る相関図である。
【0036】
図3には、キャリア軸4a・4a・・・上のプラネタリギア3・3・・・が不等配置となっている遊星歯車機構2bを例示している。本実施例に示す遊星歯車機構2bでは、9個のプラネタリギア3・3・・・が、40度ずつ位相を異ならせて均等な位置に配設(9等配)されるべきところが、そのうち一つのプラネタリギア3aだけ位相がズレた状態で配設されている。
【0037】
そして、係る構成である遊星歯車機構2bを不等配置検出装置1に装着して、モータ7を駆動して、遊星歯車機構2bを回転駆動させつつ、各部8・9によってモータ軸7aの回転量をおよびモータ軸7aに作用するトルクを検出する。そして、各部8・9によって検出した回転量およびトルクのデータが演算装置10に入力される。
【0038】
そして、演算装置10によって、入力された回転量とトルクのデータに基づいて、回転量とトルクの相関データが算出される。ここで、プラネタリギア3・3・・・が不等配置である遊星歯車機構2bについての相関データは、図4(b)に示すような波形データ(異常波形)として表される。
【0039】
次に、図4(b)に示す如く、算出された相関データ(波形データ)の処理対象区間Xにおいて、線形近似線Sを算出する。そして、この線形近似線Sを基準として、演算装置10に予め記憶されている上限離間幅dHと下限離間幅dLを用いて、上限閾値線Hおよび下限閾値線Lを設定し、線形近似線Sに対する良品範囲Dを規定する。
すると、プラネタリギア3・3・・・が不等配置となっている遊星歯車機構2の場合、回転量とトルクの相関を示す波形データは、振幅が大きくなる傾向があるため、波形データが良品範囲Dからはみ出す部位が出現する。
【0040】
このように、処理対象区間Xについて算出した波形データにおいて、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dからはみ出す部位が存在している場合には、プラネタリギア3・3・・・が不等配置であると判断するようにしている。
【0041】
さらに、図5(a)に示す如く、処理対象区間Xを細分化して、細分化処理対象区間x1・x2・x3を設定し、各処理対象区間x1・x2・x3ごとに基準線形近似線Sk1・Sk2・Sk3を算出し、それぞれに基準上限閾値線Hk1・Hk2・Hk3および基準下限閾値線Lk1・Lk2・Lk3を規定して、各処理対象区間x1・x2・x3ごと各上限離間幅dH1・dH2・dH3および各下限離間幅dL1・dL2・dL3を設定することが可能である。
【0042】
この場合、図5(b)に示す如く、不等配置の検出対象から検出した波形データに対しても、処理対象区間Xを細分化して、細分化処理対象区間x1・x2・x3を設定し、各処理対象区間x1・x2・x3ごとに線形近似線S1・S2・S3を算出し、各処理対象区間x1・x2・x3ごと各上限離間幅dH1・dH2・dH3および各下限離間幅dL1・dL2・dL3を用いて、それぞれに上限閾値線H1・H2・H3および下限閾値線L1・L2・L3を設定し、細分化処理対象区間x1・x2・x3ごとに良品範囲D1・D2・D3を設定することが可能となる。
【0043】
このように処理対象区間Xを細分化することによって、良品範囲D1・D2・D3をより狭く設定することが可能となり、不等配置検出装置1によってプラネタリギア3・3・・・の不等配置を検出する精度をより向上させることができる。
【0044】
また、図5(a)に示すように、プラネタリギア3・3・・・の配置が適切である場合には、細分化処理対象区間x1・x2・x3ごとに求めた各基準線形近似線Sk1・Sk2・Sk3の傾きは全て略一致する傾向がある。一方、図5(b)に示すように、プラネタリギア3・3・・・の不等配置である場合には、細分化処理対象区間x1・x2・x3ごとに求めた各線形近似線S1・S2・S3の傾きはばらつく傾向がある。
【0045】
この傾向を利用して、細分化処理対象区間x1・x2・x3ごとに求めた各線形近似線S1・S2・S3の傾きの差異やばらつき等を考慮する(即ち、判断基準に加える)ことによって、不等配置検出装置1によって、プラネタリギア3・3・・・の不等配置をさらに容易に検出するとともに、検出する精度をさらに向上させることが可能である。
【0046】
即ち、本発明の一実施例に係る不等配置検出装置1は、プラネタリギア3・3・・・の配置が適当であることが既知である基準遊星歯車機構たる遊星歯車機構2aから、該遊星歯車機構2aの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す基準波形データを算出し、該基準波形データにおいてデータ処理の対象とする処理対象区間Xを設定するとともに、該処理対象区間Xにおける前記基準波形データに対して基準線形近似線Skを算出し、さらに、該基準線形近似線Skに平行な2本の線分であって、該2本の線分の間に処理対象区間Xにおける前記基準波形データを内包する位置に設定される基準上限閾値線Hkと基準下限閾値線Lkを設定し、基準線形近似線Skと基準上限閾値線Hkとの離間幅である上限離間幅dHと、基準線形近似線Skと基準下限閾値線Lkとの離間幅である下限離間幅dLと、を予め設定しておき、プラネタリギア3・3・・・の配置が不明である検出対象たる遊星歯車機構2bを回転駆動した際の、該遊星歯車機構2bの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す波形データを算出し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出するものである。
【0047】
また、本発明の一実施例に係る不等配置検出装置1による不等配置検出方法は、入力軸11、または、出力軸12の回転量を検出する回転量検出部8と、入力軸11、または、出力軸12に作用するトルクを検出するトルク検出部9と、回転量検出部8による回転量の検出結果とトルク検出部9によるトルクの検出結果が入力される演算装置10と、を備え、演算装置10には、プラネタリギア3・3・・・の配置が適当である基準となる遊星歯車機構たる遊星歯車機構2aから検出した回転量とトルクとの相間を表す基準波形データにおいて、データ処理の対象として設定される処理対象区間Xと、該処理対象区間Xにおける前記基準波形データを線形近似して算出した基準線形近似線Skに対して平行な2本の線分であって、該2本の線分の間に処理対象区間Xにおける前記基準波形データを内包する位置に設定される基準上限閾値線Hkおよび基準下限閾値線Lkの基準線形近似線Skとの離間幅である上限離間幅dHおよび下限離間幅dLと、が予め記憶され、プラネタリギア3・3・・・の配置が不明である検出対象たる遊星歯車機構2bから、回転量検出部8によって、遊星歯車機構2bの入力軸11、または、出力軸12の回転量を検出するとともに、トルク検出部9によって、入力軸11、または、出力軸12に作用するトルクを検出し、演算装置10によって、遊星歯車機構2bの回転量とトルクとの相関を表す波形データを生成し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出するものである。
このような構成により、プラネタリギア3・3・・・の不等配置を容易に検出することができる。
【0048】
また、本発明の一実施例に係る不等配置検出装置1および不等配置検出装置1による不等配置検出方法では、処理対象区間Xを細分化して細分化処理対象区間x1・x2・x3を設定し、細分化処理対象区間x1・x2・x3ごとに前記基準波形データの基準線形近似線Sk1・Sk2・Sk3を算出するとともに、前記波形データを細分化処理対象区間x1・x2・x3ごとに各良品範囲D1・D2・D3と比較し、前記波形データにおいて各良品範囲D1・D2・D3から外れている部位を有する細分化処理対象区間x1・x2・x3が存在していることをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出するものである。
このような構成により、プラネタリギア3・3・・・の不等配置を精度良く検出することができる。
【0049】
尚、本実施例では、遊星歯車機構の入力軸あるいは出力軸の、回転量とトルクの相関からプラネタリギアの不等配置を検出する構成としているが、例えば、入力軸の回転量に応じて出力軸が軸心方向に変位する構成の遊星歯車機構においては、不等配置検出装置によって、入力軸のトルクと出力軸に作用する軸心方向の荷重を検出し、トルクと荷重の相関を用いてプラネタリギアの不等配置を検出する構成とすることも可能である。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施例に係る不等配置検出装置の全体構成を示す模式図。
【図2】プラネタリギアの配置が適当である遊星歯車機構を示す模式図。
【図3】プラネタリギアの配置が不等配置である遊星歯車機構を示す模式図。
【図4】入力軸の回転量と入力軸に作用するトルクの相関を示す図、(a)プラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)プラネタリギアの配置が不等配置である遊星歯車機構に係る相関図。
【図5】処理対象区間を細分化した場合における入力軸の回転量と入力軸に作用するトルクの相関を示す図、(a)プラネタリギアの配置が適当である遊星歯車機構に係る相関図、(b)プラネタリギアの配置が不等配置である遊星歯車機構に係る相関図。
【符号の説明】
【0051】
1 不等配置検出装置
2 遊星歯車機構
3 プラネタリギア
4 プラネタリキャリア
8 回転量検出部
9 トルク検出部
10 演算装置
11 入力軸
12 出力軸
【特許請求の範囲】
【請求項1】
プラネタリギアの配置が適当であることが既知である基準遊星歯車機構を回転駆動した際の、
該基準遊星歯車機構の入力軸、または、出力軸の回転量と、
前記入力軸、または、前記出力軸に作用するトルクとの相間を表す基準波形データを算出し、
該基準波形データにおいてデータ処理の対象とする処理対象区間を設定するとともに、該処理対象区間における前記基準波形データに対して基準線形近似線を算出し、
さらに、該基準線形近似線に平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線と基準下限閾値線を設定し、
前記基準線形近似線と前記基準上限閾値線との離間幅である上限離間幅と、
前記基準線形近似線と前記基準下限閾値線との離間幅である下限離間幅と、
を予め設定しておき、
プラネタリギアの配置が不明である検出対象たる遊星歯車機構を回転駆動した際の、
該遊星歯車機構の入力軸、または、出力軸の回転量と、
前記入力軸、または、前記出力軸に作用するトルクとの相間を表す波形データを算出し、
前記処理対象区間における前記波形データに対して線形近似線を算出し、
さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、
前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、
前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、
前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする遊星歯車機構の不等配置検出方法。
【請求項2】
前記処理対象区間を細分化して細分化処理対象区間を設定し、
前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、
前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、
前記波形データにおいて前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする請求項1に記載の遊星歯車機構の不等配置検出方法。
【請求項3】
入力軸、または、出力軸の回転量を検出する回転量検出部と、
前記入力軸、または、前記出力軸に作用するトルクを検出するトルク検出部と、
前記回転量検出部による回転量の検出結果と前記トルク検出部によるトルクの検出結果が入力される演算装置と、
を備え、
前記演算装置には、
プラネタリギアの配置が適当である基準遊星歯車機構から検出した回転量とトルクとの相間を表す基準波形データにおいて、データ処理の対象として設定される処理対象区間と、
該処理対象区間における前記基準波形データを線形近似して算出した基準線形近似線に対して平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線および基準下限閾値線の前記基準線形近似線との離間幅である上限離間幅および下限離間幅と、
が予め記憶され、
プラネタリギアの配置が不明である検出対象たる遊星歯車機構から、
前記回転量検出部によって、
前記遊星歯車機構の入力軸、または、出力軸の回転量を検出するとともに、
前記トルク検出部によって、
前記入力軸、または、前記出力軸に作用するトルクを検出し、
前記演算装置によって、
前記遊星歯車機構の回転量とトルクとの相関を表す波形データを生成し、
前記処理対象区間における前記波形データに対して線形近似線を算出し、
さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、
前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、
前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、
前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする遊星歯車機構の不等配置検出装置。
【請求項4】
前記処理対象区間を細分化して細分化処理対象区間を設定し、
前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、
前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、
前記波形データが前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする請求項3に記載の遊星歯車機構の不等配置検出装置。
【請求項1】
プラネタリギアの配置が適当であることが既知である基準遊星歯車機構を回転駆動した際の、
該基準遊星歯車機構の入力軸、または、出力軸の回転量と、
前記入力軸、または、前記出力軸に作用するトルクとの相間を表す基準波形データを算出し、
該基準波形データにおいてデータ処理の対象とする処理対象区間を設定するとともに、該処理対象区間における前記基準波形データに対して基準線形近似線を算出し、
さらに、該基準線形近似線に平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線と基準下限閾値線を設定し、
前記基準線形近似線と前記基準上限閾値線との離間幅である上限離間幅と、
前記基準線形近似線と前記基準下限閾値線との離間幅である下限離間幅と、
を予め設定しておき、
プラネタリギアの配置が不明である検出対象たる遊星歯車機構を回転駆動した際の、
該遊星歯車機構の入力軸、または、出力軸の回転量と、
前記入力軸、または、前記出力軸に作用するトルクとの相間を表す波形データを算出し、
前記処理対象区間における前記波形データに対して線形近似線を算出し、
さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、
前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、
前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、
前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする遊星歯車機構の不等配置検出方法。
【請求項2】
前記処理対象区間を細分化して細分化処理対象区間を設定し、
前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、
前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、
前記波形データにおいて前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする請求項1に記載の遊星歯車機構の不等配置検出方法。
【請求項3】
入力軸、または、出力軸の回転量を検出する回転量検出部と、
前記入力軸、または、前記出力軸に作用するトルクを検出するトルク検出部と、
前記回転量検出部による回転量の検出結果と前記トルク検出部によるトルクの検出結果が入力される演算装置と、
を備え、
前記演算装置には、
プラネタリギアの配置が適当である基準遊星歯車機構から検出した回転量とトルクとの相間を表す基準波形データにおいて、データ処理の対象として設定される処理対象区間と、
該処理対象区間における前記基準波形データを線形近似して算出した基準線形近似線に対して平行な2本の線分であって、該2本の線分の間に前記処理対象区間における前記基準波形データを内包する位置に設定される基準上限閾値線および基準下限閾値線の前記基準線形近似線との離間幅である上限離間幅および下限離間幅と、
が予め記憶され、
プラネタリギアの配置が不明である検出対象たる遊星歯車機構から、
前記回転量検出部によって、
前記遊星歯車機構の入力軸、または、出力軸の回転量を検出するとともに、
前記トルク検出部によって、
前記入力軸、または、前記出力軸に作用するトルクを検出し、
前記演算装置によって、
前記遊星歯車機構の回転量とトルクとの相関を表す波形データを生成し、
前記処理対象区間における前記波形データに対して線形近似線を算出し、
さらに、前記線形近似線を基準として前記上限離間幅だけ離間した上限閾値線と、
前記線形近似線から下限離間幅だけ離間した下限閾値線と、を設定するとともに、
前記上限閾値線と前記下限閾値線によって規定される良品範囲を設定して、
前記波形データにおいて前記良品範囲から外れている部位が存在することをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする遊星歯車機構の不等配置検出装置。
【請求項4】
前記処理対象区間を細分化して細分化処理対象区間を設定し、
前記細分化処理対象区間ごとに前記基準波形データの前記基準線形近似線を算出するとともに、
前記波形データを前記細分化処理対象区間ごとに前記良品範囲と比較し、
前記波形データが前記良品範囲から外れている部位を有する前記細分化処理対象区間が存在していることをもって、
前記遊星歯車機構を構成するプラネタリギアの不等配置を検出する、
ことを特徴とする請求項3に記載の遊星歯車機構の不等配置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−151537(P2010−151537A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2008−328397(P2008−328397)
【出願日】平成20年12月24日(2008.12.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年12月24日(2008.12.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]