
運動中の標的の動的追跡
運動(サイクルPの周期的運動である場合がある)を行う解剖学的領域内に位置する治療標的、例えば腫瘍又は病変部を動的に追跡する。解剖学的領域の非剛的運動及び変形について1組のCT又は他の3D画像から4D数学的モデルを構築する。4D数学的モデルは、解剖学的領域の部分の3D場所をP内における時間的位置の関数として追跡対象の標的に関連付ける。術前DRRと術中x線画像との非基準非剛体画像位置合わせ方式を用いて解剖学的領域の標的及び(又は)他の部分の絶対位置を突き止める。運動センサ、例えば表面マーカを用いてサイクルPを求める。1)非剛体画像位置合わせの結果、2)4Dモデル、3)P内における時間的位置を用いて放射線ビームを投与する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運動中の標的の動的追跡に関する。
【背景技術】
【0002】
幾つかの医学的用途では、時間が経つにつれ動く標的を動的に追跡することが必要な場合がある。例えば、放射線外科手術では、呼吸及び(又は)心拍動につれて動く人体内の腫瘍及び(又は)病変部を動的に追跡することが望ましい場合がある。放射線外科手術では、治療計画立案時間中にコンピュータ処理された放射線量分布を達成するために患者の解剖学的構造を通って治療対象の病変部又は腫瘍への放射線ビームの正確な軌跡が重要な場合がある。例えば呼吸又は心拍動に起因して動く人体の解剖学的構造の領域に関し、作成中の治療計画に対するこの運動の影響をコンピュータ処理する際にかかる運動を考慮に入れることが重要である。動的追跡は、解剖学的構造の部分が呼吸、心拍動又は任意他の種類の運動に起因して動く放射線外科手術以外の用途においても有用な場合がある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
過去においては、解剖学的構造の運動中の領域を追跡するために基準マーカが用いられていた。基準手段を利用した追跡は、多くの理由で患者にとって困難な場合がある。例えば、骨に植え込まれた基準マーカを用いることにより高い精度が達成される傾向があるが、侵襲性の低い方法、例えば皮膚に取り付けられたマーカ又は解剖学的位置は、正確度が低い傾向がある。基準手段を患者の体内に植え込むことは、特にC字形脊椎の場合一般に有痛性であって困難であり、このための植え込みプロセスは、臨床上の合併症を招く場合が多い。
【0004】
解剖学的構造の運動を取り扱うためのゲーティングを用いる幾つかの方法では、内部に植え込まれた基準手段とリアルタイムで追跡される外部に配置されたマーカとの間の関係を確立することにより動的追跡が達成される場合がある。これら方法は、周りの解剖学的構造の非剛体運動及び変形を運動サイクルの関数として計算に入れてはいない。
【0005】
かくして、これら欠点を解決する方法及びシステムが要望されている。特に、運動中の標的を動的に追跡する信頼性があって効率的な方法及びシステムを提供することが望ましい。
【課題を解決するための手段】
【0006】
解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して解剖学的領域が運動を行なっている間、所望の線量の治療用放射線を標的に投与することができるようにする方法及びシステムが提供される。標的は、例えば、腫瘍又は病変部であるのがよい。解剖学的領域としては、標的に加えて1つ又は2つ以上の基準構造が挙げられる。運動中の解剖学的領域内の標的の存在場所は、解剖学的領域がその運動中に生じる変形を計算に入れながら基準構造に対して突き止められる。解剖学的領域の変形としては、非剛体変形並びに剛体変形が挙げられる。
【0007】
一実施形態では、解剖学的領域の運動は、周期的な場合がある。かかる周期運動の例としては、例えば、呼吸又は心拍動が挙げられる。周期運動は、周期的なサイクルPを有することを特徴としている場合がある。他の実施形態では、解剖学的領域の運動は、サイクルPが時間の経過につれて変化する場合があり又はサイクルPを特定し得ない無周期運動である場合がある。本明細書全体を通じ、「周期運動」及び「サイクルPの周期運動」という用語としては、時間で変動する周期P(t)を有する周期運動が挙げられる。換言すると、「周期運動」及び「サイクルPの周期運動」という用語は、人体の解剖学的構造中の運動の性質が変化するものであることを説明しているものとしてこのことに言及していると理解されるべきである。
【0008】
一実施形態では、サイクルPの周期運動の動的追跡は、解剖学的領域の非剛体変形及び非剛体運動をサイクルP内における時間的相対位置の関数として説明する4D(4次元)数学的モデルを構築することにより達成される。4D数学的モデルは、解剖学的領域の複数個の画像(CT画像が挙げられるが、これには限定されない)Ij(j=1,...,p)を生じさせることにより構築でき、この場合、各画像は、サイクルP内における一連の時点tj(j=1,...,p)のうちの一時点で撮られる。サイクルPの関数としての解剖学的領域の連続非剛体変形は、或る一時点で得られたCT画像を次の一時点で得られた別のCT画像中にモーフィングすることにより数学的にモデル化される。4D数学的モデルは、骨格構造の3D(3次元)存在場所をサイクルP(これは、例えば、呼吸サイクル又は心拍動サイクルであるのがよい)内の時点の関数として標的の3D存在場所に関連付ける。
【0009】
一実施形態では、非剛体変形の4D数学的モデルは、運動中の解剖学的領域内の標的にリアルタイムで投与されるべき治療用放射線の所望の量を処方する放射線量分布を作成する治療計画発生器によって用いられる。放射線量分布は、解剖学的領域のその周期運動中における非剛体変形を計算に入れている。
【0010】
周期運動のサイクルPは、例えば、解剖学的領域の皮膚又は外面に取り付けられた運動センサ(例えば、表面マーカ又はLED(発光ダイオード))を動的に追跡することにより求めることができる。j番目の画像Ijが撮られた時点tjを含む任意所望の時点の運動サイクルP内の相対位置をこのようにして突き止めることができる。
【0011】
本明細書においては、「リアルタイム」という用語は、実際の放射線治療及び投与と実質的に同時であるタイムスケールを意味している。例えば、少なくとも数Hz又はこれよりも高い周波数の速度で生じる追跡は、本明細書においては「リアルタイム」として説明されるタイムスケールに属する。本明細書においては「近リアルタイム」という用語は、「リアルタイム」と呼ばれるタイムスケールよりも遅い、例えば、ほぼ1桁又はそれ以上の桁だけ遅いタイムスケールを意味している。例えば、一度に約1秒未満の速度で生じる事象は、本明細書においては「近リアルタイム」と呼ばれるタイムスケールに属する。
【0012】
一実施形態では、基準構造の近リアルタイム存在場所は、基準手段を用いない(fiducial-less )(以下、「無基準手段型」という場合がある)基準構造の追跡を行なうことにより突き止められる。実際のx線画像を得るために用いられるのと同一のビーム射影幾何学的形状を用いて1組のDRRをCT画像データから生成する。術中に近リアルタイムで得た実際のx線画像をDRR(ディジタル方式で再構成されたエックス線像)に位置合わせする。一実施形態では、非剛体変換パラメータが3D完全運動場から導き出される非剛体画像位置合わせアルゴリズムを用いるのがよい。完全運動場は、多くの局所運動ベクトルを推定することにより構成できる。一実施形態では、マルチレベルブロックマッチングを、パターン強度を利用した類似性測度(similarity measure)と関連して非剛体画像位置合わせアルゴリズムに用いるのがよい。一実施形態では、階層的メッシュ運動推定法を実施するのがよい。
【0013】
一実施形態では、非剛体画像位置合わせ法を用いて突き止められた基準構造の既知の近リアルタイム存在場所と、標的の存在場所は、基準構造の存在場所にどのように関連付けられるかをサイクルP内における時間的相対位置の関数として説明する4D数学的モデルを用いて求められている標的の存在場所を相関させることによりリアルタイムで突き止め可能である。運動センサからの情報を用いると、任意所望の時点におけるサイクルP内の相対位置を突き止めることができる。
【0014】
一実施形態では、治療計画立案発生器により得られた放射線量分布に従って放射線治療を標的のリアルタイム存在場所に適用する。放射線ビーム投与を治療計画立案の際に突き止められた呼吸サイクル中の瞬間又は時点に同期させるのがよい。
【発明を実施するための最良の形態】
【0015】
運動を行っている人体内の腫瘍/病変部を動的に追跡する多くの技術を説明する。かかる方法は、主として放射線外科手術に用いられる方法であるが、呼吸又は心拍動のために運動する解剖学的構造の種々の部分を動的に追跡することが必要な他の用途においても有用な場合がある。
【0016】
以下の詳細な説明の中には、アルゴリズム及びコンピュータ記憶装置内のデータビットに関する操作の記号による表示に関して提供されている部分がある。これらアルゴリズムによる説明及び表示は、データ処理分野における当業者によりかかる当業者の仕事の実質を他の当業者に最も効果的に伝えるために用いられている手段である。アルゴリズムは、所望の結果をもたらすステップの自己一貫性のあるシーケンスであると考えられる。これらステップでは、物理的量の物理的操作が必要である。通常、必要ではないが、これらの量は、ストレージされ、転送され、組み合わされ、比較され、違ったやり方で操作できる電気又は磁気的信号の形態を取っている場合がある。これら信号をビット、値、要素、記号、文字、用語、数等として言及することが、主として共通の使用法のために時々において有利であることが判明した。
【0017】
しかしながら、念頭に置いておくべきこととして、これら用語及び類似の用語は全て、適当な物理的量と関連すべきであり、これら量に付けられた単に便宜上の表示である。特段の指定が無ければ、以下の説明全体を通じ、例えば「処理」又は「コンピュータ処理」又は「計算」又は「突き止め」又は「表示」等の用語を利用する説明は、コンピュータシステム又はこれに類似した電子コンピュータ処理装置の動作及びプロセスに関するものである。コンピュータシステムは、コンピュータシステムのレジスタ及びメモリ内の物理的又は電子的量として与えられたデータを操作してこれらデータをコンピュータシステムのメモリ若しくはレジスタ又は他のかかる情報ストレージ、伝送又は表示装置内の物理的量として同様に表される他のデータに変換する。
【0018】
以下に説明する方法及び技術は、以下に説明する動作を行う装置によって実施できる。かかる装置は、特に、所要の目的に合わせて構成されている場合があるが、この装置は、汎用コンピュータを含み、コンピュータ内にストレージされているコンピュータプログラムにより選択的に作動され又は再構成される。かかるコンピュータプログラムは、コンピュータにより読み取り可能なストレージ媒体、例えばフロッピー(登録商標)ディスク、光ディスク、CD−ROM、磁気光ディスク、読み取り専用記憶装置(ROM)、ランダムアクセスメモリ(RAM)、EPROM、磁気若しくは光カード、又は電子指令をストレージするのに適した任意形式の媒体(これらには限定されない)にストレージできる。コンピュータにより読み取り可能なかかるストレージ媒体は各々、コンピュータシステムバスに結合できる。
【0019】
本明細書において提供されるアルゴリズム及びディスプレイは、本来的には、任意特定のコンピュータ又は他の装置には関連付けられない。種々の汎用システムを以下の教示に従って設計されたプログラムに用いることができ、或いは、必要な方法及び技術を行うより特化された装置を構成するのが都合のよいことが分かる場合がある。例えば、以下に説明する方法はどれでも、ハードワイヤード回路で実施でき、或いは汎用プロセッサをプログラムすることにより実施でき、又はハードウェアとソフトウェアの任意の組合せによって実施できる。当業者であれば理解されるように、以下に説明する方法及び技術は多種多様なコンピュータシステム構成で具体化でき、かかるコンピュータシステム構成としては、手持ち装置、マルチプロセッサシステム、マイクロプロセッサ搭載又はプログラム可能消費者エレクトロニクス、ネットワークPC、ミニコンピュータ、メインフレーム(汎用コンピュータ)等で実施できる。以下に説明する方法及び技術は又、通信ネットワークを介して互いにリンクされた遠隔処理装置により仕事を行う分散型コンピュータ処理環境で実施できる。
【0020】
以下に説明する方法及びシステムは、コンピュータソフトウェアを用いて実施できる。コンピュータソフトウェアは、種々の用語、例えば、プログラム、手順又はアプリケーションを用いて言及される場合がある。公認の企画に一致したプログラミング言語で書かれている場合、これら方法及びシステムを実施するよう設計された指令のシーケンスは、種々のハードウェアプラットホーム上で実施できると共に種々のオペレーティングシステムへのインターフェイスが可能であるようにコンパイルできる。また、これら方法及びシステムは、任意特定のプログラミング言語に関して説明することはない。種々のプログラミング言語を用いて本明細書において説明する本発明の教示を実施できることは理解されよう。さらに、当該技術分野においては、アクションを行い又は結果をもたらすものとしてソフトウェアを一形態又は別の形態で述べることは、通例である。かかる表現は、コンピュータによるソフトウェアの実行により、コンピュータ内の1つ又は2つ以上のプロセッサがアクションを行い又は結果をもたらすようにすることを述べる単なる速記法的な仕方である。
【0021】
図1は、運動中の標的の無基準手段型動的追跡を説明する概略流れ図100である。標的は、解剖学的領域内に位置している。標的は、腫瘍又は病変部、例えば或いは関心のある器官であるのがよい。解剖学的領域としては、代表的には、標的に加えて1つ又は2つ以上の基準構造が挙げられる。動的追跡方法及びシステムの一実施形態では、基準構造は、骨格構造(即ち、骨)であるのがよい。別の実施形態では、基準構造は、生まれつき備わっている他の解剖学的構造であってよく、かかる解剖学的構造としては、軟骨又は他の(代表的には、密度がかなり高い)器官が挙げられるが、これらには限定されない。さらに別の実施形態では、基準構造は、人工構造、例えば基準手段又は手術用ハードウェアであってよい。
【0022】
上述したように、本明細書全体を通じて、「サイクルPの周期運動」という用語は、周期運動のサイクルP並びに運動の振幅及び波形が時間が経つにつれ変化する周期運動を含むものと理解されるべきである。換言すると、「周期運動」又は「サイクルPの周期運動」という用語は、人体の解剖学的構造中の運動の性質が変化する状態を意味するものとしても理解されるべきである。
【0023】
上述したように、解剖学的領域は、その運動中変形(これは、非剛体変形である場合がある)を生じる場合がある。図1に示す実施形態では解剖学的領域は非剛体変形を受けながら周期的に運動するものとして説明されるが、本明細書において説明する方法及びシステムを用いて解剖学的領域の任意他の運動(例えば、無周期運動)及び任意種類の変形を追跡することができる。
【0024】
概要説明にあたり、図1に示す実施形態では、ステップ105〜160において、周期的に運動していると共に非剛体的に変形する解剖学的領域内の標的の存在場所を突き止める。非剛体的に運動すると共に変形している解剖学的領域中への放射線の実質的に連続した投与に起因して得られる放射線量分布をコンピュータ処理する。最後に、ステップ170において、コンピュータ処理された放射線量分布に従って放射線を標的にリアルタイムで投与する。
【0025】
第1のステップとして、ステップ105において、1組のCT画像Ij(j=1,...,p)を収集し、各CT画像は、サイクルP内での一連の時点tj(j=1,...,p)のうちの一時点において撮られる。ステップ110では、例えば、解剖学的領域の皮膚に取り付けられたマーカ又はセンサの動的追跡により周期運動のサイクル(例えば、呼吸サイクル又は心拍動サイクル)を求める。
【0026】
ステップ120では、これらCT走査及びセンサから得られた運動サイクル情報から4D(3D+時間)数学的モデルを構築する。数学的モデルは、解剖学的領域がその周期運動(例えば、呼吸)を行っているときにこの解剖学的領域の非剛体運動及び変形を運動サイクルP中の時点の関数として説明する。4Dモデルは、標的の存在場所を周期的に運動している解剖学的領域内の基準構造の存在場所にサイクルP内における時間的相対位置の関数として関連付ける。より一般的に言えば、この4Dモデルは、解剖学的構造の1つ又は複数の部分と放射線外科手術のために追跡されるべき標的との間の3D+時間関係を呼吸サイクル中の時点の関数として説明することができる。
【0027】
次に、ステップ130、ステップ135及びステップ140では、x線画像化及び2Dから3Dへの画像位置合わせを利用して解剖学的構造の1つ又は複数の部分の絶対位置を突き止める。これらステップにおいて、基準構造及び(又は)標的の存在場所を、非剛体画像位置合わせアルゴリズムを用いる基準構造及び(又は)標的の無基準手段型追跡により近リアルタイムで突き止める。
【0028】
上述したように、本明細書においては、「リアルタイム」という用語は、実際の放射線治療と投与と実質的に同時のタイムスケールを意味している。ちょうど1つの例示の実施形態では、標的の術中リアルタイム追跡を、約30Hzレートで追跡する光マーカを用いると共に約80Hzレートで予測を更新するモデルを用いて実施することができる。これは、例示であるに過ぎず、リアルタイム追跡は、一般に約1Hzよりも高い広範な種々の追跡速度で行うことができる。「近リアルタイム」という用語は、「リアルタイム」という用語で説明されるタイムスケールよりも約1桁又は2桁以上遅いタイムスケールを意味する。一例を挙げると、1秒の約何分の一から約数秒の範囲にあるx線画像を収集するタイムスケールを「近リアルタイム」と呼ぶ。
【0029】
ステップ105で収集したCT画像からステップ130において解剖学的領域の1組のDRRを生じさせる。ステップ135において、解剖学的領域の実際のx線射影画像を収集する。ステップ140において、基準画像のDRRを基準構造の近リアルタイムx線画像に位置合わせする。
【0030】
ステップ150では、4D治療計画立案を行い、この場合、非剛体的に運動すると共に変形している解剖学的領域中への連続ビーム投与に起因する放射線量分布状態をコンピュータ処理する。このステップでは、基準構造の絶対存在場所の知識(ステップ140で得られた知識)を用いると共に基準構造を呼吸サイクル中の時点(センサからの情報を用いて求められる)に関連付けると共に存在場所が追跡されている標的に関連付ける4Dモデルを用いて放射線ビーム軌跡を求める。
【0031】
ステップ160において、標的の存在場所を突き止める。一実施形態では、無基準手段型の追跡により突き止められた骨格構造の絶対位置及び運動サイクルに関するセンサから得た情報と共に4D数学的モデルを用いて標的の存在場所を突き止めるのがよい。変形実施形態では、標的存在場所を2D/3D非剛体画像位置合わせ法により突き止めてもよく、その間、DRR(治療計画立案段階中に生成される)を近リアルタイムx線画像上に位置合わせする。最後に、ステップ170において、4D治療計画を立案により得られた放射線量分布に従って放射線を標的に投与する。
【0032】
図2は、患者の解剖学的構造内の運動中の標的の術前画像(例えば、3D CT走査)の収集法を概略的に示している。図示の実施形態は、3D CT走査を示しているが、任意他の形式の3D走査を実施してもよく、かかる3D走査としては、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査が挙げられるが、これらには限定されない。図示の実施形態では、患者の呼吸サイクルP内における互いに異なる時点tj(j=1,...,k,...,l,...,m,...,p)で1組のCT走査を撮る。図示の実施形態では、t1<tk<tl<tm<tpである。時点tjは、患者の呼吸サイクル中の別々の時期に相当している。サイクルPを外部センサ、例えば呼吸センサによってモニタする。例えば、表面マーカ(例えばLED)又はこれに類似した装置を皮膚に取り付けるのがよい。標的が呼吸以外の運動を行う実施形態では、種々の形式のセンサ(例えば、心拍動がモニタされる場合には心臓モニタ)を用いるのがよい。
【0033】
図示の実施形態では、CT画像を時点tk,tl,tpでそれぞれ撮る。呼吸サイクルP内における時期又は時点は、好ましくは、呼吸運動の動的範囲全体を実質的に含むよう選択される。例えば、一実施形態では、時点は、サイクルPの谷に相当する時点tl、サイクルPの山に相当する時点tp、及びサイクルPの山と谷との中間位置にある第3の時点tkを含むのがよい。他の実施形態では、CT画像を撮るために選択される時点は、上述した3つの時点tl,tp,tkよりも多くの時点を含むのがよい。
【0034】
この組をなすCT画像の検討から、運動サイクル中の一時点又は時期で収集されたCT画像を運動サイクル中の次の時点又は時期で収集された別のCT画像中にモーフィングする4D数学的モデルを構築し、解剖学的構造の連続非剛体変形に関するモデルを運動サイクルの関数として構成する。画像処理にあたり、当該技術分野においては、一画像を別の画像中にモーフィングすると共にこれを数学的モデルにより説明することは周知である。公知であって市販されている標準型ソフトウェア及び(又は)アルゴリズムを用いることができる。
【0035】
一実施形態では、図2に示す1組のCT画像から構築された4D数学的モデルを4D治療計画立案のために、即ち、治療標的の非合成運動及び変形を運動サイクル内の時間的位置の関数として計算に入れて非合成的に運動している解剖学的構造中への連続放射線ビーム投与から得られる放射線量分布をコンピュータ処理するために用いる。この実施形態では、4D治療計画立案は、2つの部分、即ち、a)解剖学的構造の非剛体変形に関する数学的モデルを上述したように運動サイクル中の時点の関数として構築する部分、及びb)この数学的モデルを用いて非剛体的に運動している解剖学的構造中への連続放射線ビーム投与に起因する放射線量分布をコンピュータ処理する部分とから成る。
【0036】
所望の放射線量分布をコンピュータ処理するために、先ず最初に、ビーム軌跡を名目上の患者座標系に関して規定する。一実施形態では、名目上患者座標系は、図2に示すと共に運動サイクルをカバーするよう収集された幾つかのCT画像のうちの1つに関して方位を定めるよう選択されるのがよい。他の実施形態では、種々の向き又は方位を選択することができる。一実施形態では、各CT画像が撮られた時点に対応した時期から各放射線ビームをターンオンし、この放射線ビームは、所望の放射線量分布を与えるよう選択された期間にわたりオンのままである。線量吸収度は、患者の解剖学的構造の非剛体変形を計算に入れて当初の時点から時間の関数として計算される。
【0037】
一実施形態では、4D数学的モデルは、1つ又は2つ以上の基準構造の3D存在場所を運動サイクル中の時点の関数として標的の3D標的場所に関連付ける。4Dモデルでは、選択された基準構造のうちの1つ又は2つ以上は、運動サイクルに関して静止しているのがよく、他方、選択された基準構造の他のものは、運動サイクルに関して非合成運動を行うのがよい。
【0038】
図3は、a)患者の運動全体を通じて実質的に静止している実質的に剛体の基準構造、及びb)患者の運動に伴ってそれ自体運動する多数の基準構造のうちの一方を用いて標的の3D運動を患者の運動サイクルの関数として追跡する方法を概略的に示している。2つの種類のモデルが可能であり、かかるモデルは、(a)実質的に静止している実質的に剛体の基準構造(かかる基準構造としては、脊椎構造が挙げられるが、これには限定されない)に関する運動サイクルの関数としての標的(腫瘍/病変部)の3D運動、又は(b)解剖学的領域の周期運動と一緒にそれ自体運動する多数の基準構造に関する運動サイクルの関数としての標的(例えば、腫瘍/病変部)の3D運動である。
【0039】
図3に示す実施形態では、標的210は、解剖学的領域200の周期運動により解剖学的領域200内で運動する。基準構造は、参照符号230,232を用いて示されている。基準構造230はそれ自体、呼吸に伴って動く、他方、基準構造232は、解剖学的領域200の呼吸又は他の周期運動に伴って運動することはない実質的に剛体の基準構造である。
【0040】
多数の骨格構造の3D存在場所及び向きにより、各骨格構造から腫瘍又は病変部に向いたベクトルを描くことができる。腫瘍/病変部の3D運動を呼吸に関してそれ自体動くことはない剛体骨格構造(例えば、参照符号210を用いて図3に示された骨格構造)に関して腫瘍/病変部の3D運動を呼吸サイクルの関数として説明するモデルを、例えば、治療のために背臥位にある患者の脊椎構造(これは、かかる非運動状態の骨格構造の実際の例である)と関連して用いることができる。呼吸に伴ってそれ自体運動する剛体骨格構造が参照される別のモデルでは、腫瘍/病変部の3D運動を1)呼吸サイクルと2)呼吸に伴ってそれ自体運動する多数の骨格構造の存在場所の複合関数として説明することができる。
【0041】
基準構造の存在場所と標的の存在場所との関係を周期運動サイクル中の時点の関数として4Dモデルによっていったん求めると、基準構造の絶対位置を近リアルタイムで突き止める。一実施形態では、これは、1)図2に示されていて、4D数学的モデルを生じさせるために用いられた3D CT画像から基準構造のDRRを生じさせ、2)基準構造の「実際の(live)」又は近リアルタイムx線画像を撮り、次に3)実際のx線画像とDRRとの間の非剛体画像位置合わせを行うことにより達成される。非剛体画像位置合わせを用いて基準構造の存在場所をいったん突き止めると、上述した4D数学的モデルを用いて標的の存在場所を容易に突き止めることができる。
【0042】
図4は、基準構造の無基準手段型追跡方法を概略的に示している。一実施形態では、無基準手段型の追跡は、標的の2D近リアルタイムx線画像を患者の運動サイクル中の特定の時点で撮られた術前3D走査から生成されたDRRに位置合わせすることにより実施される。患者の解剖学的構造中の基準構造の位置及び向き(治療用放射線の投与時点における)を、2Dから3Dへの位置合わせ法を用いてCT画像のうちの1つの中の対応の構造に関して追跡することができる。一実施形態では、以下に詳細に説明するように非剛体2D/3D画像位置合わせを実施する。
【0043】
2D/3D非剛体画像位置合わせ法における第1ステップとして、治療用放射線の投与時点における実際の画像の収集の際に用いられる射影幾何学的形状についてDRRのライブラリを生じさせる。患者の1対の実際の(又、「近リアルタイム」)x線画像を、DRRを生じさせるために用いたのと同一の射影幾何学的形状を用いて治療用放射線の投与中に収集する。DRRを生じさせるために用いられるCT画像は、運動サイクル中の時期のうちの1つ、代表的には、治療計画立案中にビームが割り当てられる時期に対応している。治療中、患者の代表的な運動範囲をカバーするためにCT画像の幾つかの並進(平行移動)及び向きについてDRRを生じさせるのがよい。
【0044】
基準構造を追跡する特徴認識アルゴリズムを用いて収集した画像をDRRに位置合わせする。画像位置合わせアルゴリズム(以下に詳細に説明する)を多数の基準構造について繰り返し実施してCT画像中の対応の構造(DRRを生じさせるもととなる構造)に対する各構造の位置及び向きを与える。一実施形態では、腫瘍若しくは病変部又は近くの解剖学的領域の画像化特性の相違を、高感度x線検出器を用いることにより一段と強調するのがよい。
【0045】
一実施形態では、腫瘍/病変部の存在場所を非剛体位置合わせ法により突き止められた基準構造の存在場所から導き出すことができる。無基準手段型のアルゴリズムを用いて追跡された多数の基準構造の存在場所及び向きは、CT画像及び4Dモデルから教示されるようにこれらの対応の幾何学的関係を用いて腫瘍/病変部の存在場所を補間するために用いられる。別の実施形態では、無基準手段型の追跡は、標的(例えば、腫瘍/病変部)それ自体について行われる。追跡対象の標的が前の組織に対してx線画像化特性が十分に異なっている場合、以下に説明する2Dから3Dへの位置合わせ技術を用いて標的それ自体を直接追跡することができる。
【0046】
解剖学的構造の非剛体変形を計算に入れると共に基準手段に代えて解剖学的基準構造を用いる非剛体2Dから3Dへの画像位置合わせ技術について以下に説明する。以下に説明する非剛体画像位置合わせアルゴリズムを骨格構造、特に人体の解剖学的構造の脊椎領域の骨格構造に関して説明するが、脊椎骨格構造以外の基準構造も又、この非剛体画像位置合わせアルゴリズムに使用できることは理解されるべきである。
【0047】
非剛体画像位置合わせ技術は又、以下の5つの共通所有者の特許出願に記載されており、かかる特許出願は、1)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−136)(発明の名称:Fiducial-less Tracking With Non-Rigid Image
Registration)、2)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−137)(発明の名称:Motion Field Generation For Non-right Image Registration)、3)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−146)(発明の名称:ROI Selection in Image Registration)、4)米国特許出願第10/881,208号名称(代理人事件番号:ACCL−147)(発明の名称:Image Enhancement Method and System For Fiducial-less Tracking of Treatment Targets)、5)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−150)(発明の名称:DRR Generation Using A Non-Linear Attenuation Model)である。共通所有者の5つの特許出願全てを参照により引用し、これらの記載内容を本明細書の一部とする。
【0048】
図5は、術前CT走査データから再構築された解剖学的領域の2D DRRと解剖学的領域内の標的の術中近リアルタイムx線射影画像との間との間の2D/3D位置合わせのために用いることができる非剛体画像位置合わせアルゴリズムの流れ図400である。特に、DRRは、周期サイクルP内における特定の時点tjで撮られたCT画像Ijを表すCT走査データから再構築される。
【0049】
第1のステップとして、ステップ402においてCT画像Ijを表す術前3D走査データから2D DRRを生じさせるのがよい。一実施形態では、非剛体画像位置合わせが行われる画像(即ち、DRR及びx線画像)は、各々アレイ状に並べられた画素を有することを特徴とする離散化画像であり、各画素は、画素に対応した単位表面領域における画像の強度を表す関連の画素値を有する。
【0050】
一実施形態では、改良型DRR生成プロセスをステップ402において実施して骨格基準構造を引き出すことができ、かかる骨格基準構造は、通常は画像中に容易には見えず、それどころか、隠されている場合がある。ステップ402において、骨格構造を強調し、かくしてDRRの品質を向上させる非直線減衰モデルを利用してCT走査データを修正する。流れ図400のステップ403において、DRRについて画像強調技術も又実施するのがよい。このステップでは、ステップ402において得られたDRR中の骨格構造を引き出すためにシルクハット形フィルタを用いる。
【0051】
例示の実施形態では、効率を向上させるために強調されたDRR内の選択された関心のある領域(ROI)に関して画像位置合わせを実施する。したがって、ROIは、DRRの強調後、ステップ404においてDRR中に規定される。ステップ404において実施されるROI選択プロセスは、画像エントロピーを利用し、このROI選択プロセスは、ユーザとの対話を必要としないよう完全自動化されている。次に、ステップ410において術中2Dx線射影画像をステップ410において近リアルタイムで生成する。ステップ403との類推によりシルクハット形フィルタを用いてステップ415において画像強調をx線画像について実施する。
【0052】
次に、ROI内において強調されたx線画像と強調されたDRRとの間の非剛体画像位置合わせを実施する。特に、類似性測度(similarity measure)を用いてx線画像とDRR画像の画素強度を比較する。その目的は、患者の位置及び(又は)向き及び(又は)生理学的変形の変化を突き止めることにある。ステップ420〜450において、真の患者の運動及び身体の変形を説明する非剛体変形を特定する。非剛体変形を特定するため、多くの局所運動場、即ち複数の局所的に推定された運動ベクトルで構成された完全運動場を構成する。ROI内の関心のある所与の箇所での局所運動を推定するため、パターン強度を利用した類似性測度を用いて画素強度を比較する。
【0053】
多くの局所運動で構成された完全運動場は、任意所望の非剛体変形を説明することができる。さらに、このように導き出された完全運動場は、物体の互いに異なる画像収集相互間の物体の非剛体運動(並進運動及び(又は)回転運動)を非剛体変形に加えて計算に入れることができる。ROI内の関心のある任意の箇所の局所運動ベクトルを効率的にコンピュータ処理するため、階層的メッシュ運動推定及びマルチレベルブロックマッチング(強度に基づく類似性測度と関連して行われる)を実施する。これら方法は、画像位置合わせアルゴリズム400の迅速なコンピュータ処理を可能にする。平滑度制約が、ミスマッチングの生じたメッシュノードのところに運動場を再構成するよう課される。次に、非剛体画像位置合わせに関する非剛体変換パラメータを完全運動場からコンピュータ処理する。
【0054】
図5に示す実施形態では、完全運動場により説明される非剛体変形は、患者の体内の治療標的領域の3D CT走査データの収集と標的領域のx線射影画像の収集との間で生じる。ステップ420では、先ず最初に画像全体の大域的並進を推定する。推定した大域的並進を別の全ての局所運動推定のための初期推定として用いる。次のステップ430では、局所運動をマルチレベルで推定するよう設計された階層的メッシュ構造を用いてメッシュノーダル運動推定を実施する。次のステップ440では、不整合が生じているメッシュノードについて運動場再構成を行う。運動場の再構成を行うのに、事柄の首尾一貫性のために局所運動が連続的であるという仮定に基づいた平滑度制約を課す。ステップ450では、関心のある任意所望の箇所における局所運動ベクトルを、この関心のある箇所の周りのメッシュノードについて推定されたノーダル運動から補間法により導き出す。次に、関心のある複数の所望の箇所について導き出された局所運動ベクトルを用いて完全運動場を構成する。
【0055】
図5のステップ455及びステップ460として示された最後の方のステップでは、非剛体変換パラメータを完全運動場から導き出す。ステップ455において、標的変位を完全運動場から導き出す。ステップ460では、平均剛体変換を完全運動場から導き出す。 DRR画像の品質は、適正な減衰モデル化並びにCTの数の補間のための適正な補間方式に依存している。一実施形態では、ステップ402(図2に示す流れ図に示されている)では、無基準手段型追跡のために改良型x線減衰モデルを作成し、したがって、DRRがリアルx線射影画像のようになる。直線減衰モデルは、もはや取られず、CT数は、骨と組織の減衰比の差を上述したように補償するために修正される。患者の臨床上のデータにより行われる多くの実験に基づき、以下の経験的な方程式を立てて元のCT数を修正した。
【数1】
上式において、C(x,y,z)は、箇所(x,y,z)のところに位置する3D CTボクセルの修正されたCT数を表し、a及びbは、重み係数を表し、C0(x,y,z)は、場所(ロケーション)(x,y,z)を有する3D CTボクセルの非修正CT数(直線減衰モデルに基づく)を表している。
【0056】
DRRの品質を向上させるよう一実施形態で用いられる補間方式は、双線形補間である。この実施形態では、双線形補間をステップ402で実施して各射影放射線の当たったCTボクセルに沿ってCT数を積算する。一実施形態では、関心のある各ボクセルについて、双線形補間を行い、次に3つのボクセルスライスについて1−D多項式補間を行う。3つのボクセルスライスは、関心のあるボクセルを含むボクセルスライスに加えてその各隣りのボクセルスライスを含む。
【0057】
幾つかの実施形態では、無基準手段型追跡は、通常は容易には見えず、或いは、それどころかDRR及びx線射影画像中に隠されている場合がある骨格基準構造(例えば、椎骨構造)に依存している。かかる骨格構造を位置合わせしなければならないので、DRRとx線画像の両方は、椎骨構造の細部を引き出すと共にこれらの視認性を向上させるよう強調されなければならない。したがって、一実施形態では、画像強調がDRRとx線射影画像の両方について行われる。大抵の胸部及び腰部の場合、骨格構造は、容易には見えず、又はそれどころかDRR及びx線画像中に隠されている。したがって、これらの場合、位置合わせを完全に可能にするためには、DRRとx線画像の強調が必要である。頸部の場合、脊柱の骨格構造は、DRRとx線画像の両方において良好に見えるが、かかる構造の細部は依然として明確ではない。したがって、頸部の場合、DRR及びx線画像は、位置合わせを向上させるよう強調されるべきである。
【0058】
図5に示す実施形態では、シルクハット形フィルタが、x線画像を強調する(図5のステップ(415)と共にDRR画像を強調する(図5のステップ403)よう設計されて用いられる。特に、シルクハット形フィルタ演算子をx線射影画像及びDRR画像の画素に適応することにより画像中の骨格構造を強調し又は引き出す。公知のように、シルクハット形フィルタは、2つの互いに異なるサイズの近傍中の最も明るい画素を見つけ、極めて高い値を維持する非曲線演算子である。一実施形態では、シルクハット形フィルタは、次のように作用する。即ち、小さな近傍領域中の輝度が最も高い値が大きな近傍中の値よりもユーザにより入力されたしきい値により定められる量だけ大きい場合、画素は、そのままであり、そうでなければ、画素は、消去される。シルクハット形フィルタを画像に適応した結果として、関心のある特徴の存在場所を突き止めることが可能である。
【0059】
一実施形態では、シルクハット形フィルタは、或る特定の構造要素による画像の開始及び終了の重み付け組合せを用いることにより設計される。シルクハット形フィルタ演算子は、次のように数学的に定義される。
【数2】
上式において、feは、元々の画像中の各画素にシルクハット形フィルタオペレータを適用した結果として得られる強調される画像を表し、fは、元の画像を表し、w及びbは、重み計数を表し、ψBfは、元の画像fの開始に関する構造要素を表し、ψBfは、元の画像fの終了に関する構造要素を表している。
【0060】
上記方程式(2)では、WHT(f)=f−ΥB(f)は、ホワイトシルクハット形フィルタと呼ばれ、BTH(f)=ψB(f)−fは、ブラックシルクハット形フィルタと呼ばれている。構造要素ΥB(f)及びψB(f)は、基本的な形態素演算を実施するために用いられるマスクである。構造要素のサイズは、頸部用途、胸部用途及び腰部用途で僅かに異なる。経験的な値を実験的に求める。重み係数w,bをWTH(f)及びBTH(f)の振幅によりそれぞれ適応的に求める。経験的に、重み係数w,bの値は、存在する組織が少ない頸部の場合、それぞれ約1(w=1,b=1)であることが判明した。存在する組織が多い腰部の場合、w,bの値は、それぞれ約2よりも大きい(w>2,b>2)であることが判明した。腰部の場合、重み付けプロセスは、頸部の場合と比べて、骨格構造をより大きな程度引き出す。
【0061】
一実施形態では、DRR中に規定された関心のある或る特定の領域(ROI)についてのみ画像位置合わせを行う。ROIは、治療標的(例えば、腫瘍又は病変部を含む)。一実施形態では、図5のステップ404において、画像エントロピーを具体的に特定する。このように、ROIは、最適な位置合わせを得るため、ユーザ対話を最小に抑えるため又はそれどころかユーザ対話を無くすために自動的に選択できる。画像位置合わせが画像内容又は画像情報に依存しているので、この実施形態では、ROIは、できるだけ多くの情報を含むよう最適化される。
【0062】
従来の通信手段から知られているシャノンのエントロピーは、信号及び画像処理の際の情報の尺度として一般に用いられている。シャノンエントロピーは、H=−Σinpilogpiであり、上式において、Hは、1組のn個の記号により提供される平均的な情報を表し、かかる記号の確率には、p1,p2,...,pnが与えられる。各画像(図5においてステップ403又はステップ415で強調されている)の画素に適用された場合、各画像に関するシャノンエントロピーは、H=−Σlp(l)logp(l)によって定義され、この式において、lは、画像の強度レベルであり、p(l)は、ROI中で生じる画像強度値lの確率である。シャノンによる元の公式化では、確率p1,p2,...pnを等しくさせようとするデータ中の変化は、シャノンにより考察されているようにエントロピーを増大させる。所与の画像に関し、シャノンエントロピーは、確率p1,p2,...,pnがヒストグラムエントリである画像強度ヒストグラムから従来通り計算される。
【0063】
一実施形態では、シャノンエントロピーHは、骨格構造が明るい領域中で生じるという事実に基づいて修正される。この実施形態では、修正されたシャノンエントロピーが、各画像について用いられ、これは、次のように定められる。
【数3】
上式において、lは、この場合も又、画像強度レベルでありp(l)は、ROI中で生じる画像強度値lの確率である。ステップ404(図5に示す)では、先ず最初に、修正したシャノンエントロピーを強調されたDRR画像について求める。修正シャノンエントロピーHをいったん計算すると、次に、ROIは、エントロピーHが最大化されるDRR内の領域を突き止めることにより自動的に選択される。画像位置合わせプロセスにおける次のステップ(図5のステップ420〜450)は、ROI中でのみ行われる。
【0064】
画像位置合わせプロセスをROI内に制限することには、幾つかの利点がある。一利点は、かかる制限は、位置合わせをROIについてのみ行う必要があるだけなので位置合わせプロセスをスピードアップすることができるということにある。例えば、類似性測度をROIについてコンピュータ処理すれば済み、ブロックマッチングは、ROI内で実施するだけで済む。さらに、位置合わせプロセスは、ROI内の領域に制限されると、より正確である。位置合わせが行われる領域が制限されれば制限されるほど、ROI内の構造が術前CT走査の時点と医学的治療の時点との間で互いに対して動く恐れがそれだけ一層低くなる。
【0065】
改良されて強調されたDRR(図5のステップ402及びステップ403で生成されている)及び骨格基準構造が無基準手段型の追跡を可能にするよう引き出された強調されたx線射影画像(図5のステップ415)に基づき、解剖学的領域の非剛体変形をステップ420〜ステップ450で突き止める。本明細書においては、「剛体」仮説、即ち、画像位置合わせ用途において行われる場合が多く、画像収集相互間において関心のある解剖学的構造及び病理学的構造が変形又は歪みを生じていないと仮定する仮説は、採用される必要はない。剛体仮説が不要である場合、剛体制約を保持し、即ち、本体が剛体であり、変換中、局所変化を生じないことが必要であるようにする必要性はもはや存在しない。臨床的患者データに関する観察及び分析が豊富であるということに基づき、本明細書においては、非剛体変形が、剛体変換に代えて、実際の患者の運動及び身体の変形に関する改善された説明を得るものと見なされる。非剛体変形場をコンピュータ処理することにより、患者の位置/向きを初期位置合わせ中並びに治療全体を通じてより高い信頼度でモニタして修正することができる。
【0066】
非剛体画像位置合わせにより、互いに異なる画像収集相互間に存在する固有の局所解剖学的ばらつきを、かかるばらつきの克服を可能にすることはない剛体画像位置合わせとは対照的に、計算に入れることができる。非剛体位置合わせは、画像中の全ての画素についての並進又はマッピングを提供する変形場を定める。一実施形態では、多くの局所運動ベクトル又は場で構成された完全運動場をコンピュータ処理して非剛体変形場を得る。
【0067】
局所運動場を推定するため、一実施形態では、マルチレベルブロックマッチング法がパターン強度に基づく類似性測度と関連して用いられる。この方式により、局所運動をROI中の大抵の部分で迅速且つ正確に推定することができる。コンピュータ処理による効率を見込んだマルチレベルブロックマッチングは、共通所有者の米国特許出願第10/652,786号明細書(以下、「第´786号出願明細書」という)に剛体位置合わせアルゴリズムと一緒に記載されている。なお、この米国特許出願を参照により引用し、その記載内容全体を本明細書の一部とする。サイバーナイフ放射線外科手術システムに用いられる剛体変換を利用した位置合わせアルゴリズム、即ち、アキュレイ・インコーポレイテッド(Accuray, Inc.)により開発された「FAST 6Dアルゴリズム」と関連して用いられるパターン強度に基づく類似性測度が、共通所有者の米国特許出願第10/652,786号明細書(「第´786号出願明細書」)、同第10/652,717号明細書(「第´717号出願明細書」)、及び同第10/652,785号明細書(「第´785号出願明細書」)に十分に説明されており、これら米国特許出願を参照により引用し、これらの記載内容全体を本明細書の一部とする。本明細書においては、パターン強度に基づく類似性測度及びマルチレベルブロックマッチング法を非剛体(剛体ではない)変換を利用した位置合わせアルゴリズムと関連して用いる。元々剛体画像位置合わせアルゴリズム用に開発されたパターン強度に基づく類似性測度は、非剛体方式においても2D/3D画像位置合わせ問題を解決する強力且つ効率的な技術を提供する。
【0068】
一実施形態では、ROI中の各所望の箇所のところの変位を局所的に推定するため、ブロックマッチングを実施し、即ち、関心のある箇所に中心が合わされた小さなブロックを用いる。公知のように、ブロックマッチングを利用して第1の画像第2の画像上に位置合わせする際、第1の画像を種々のブロック、例えばサイズの等しい矩形ボックスの状態に分割する。メッシュノードである場合があり又はメッシュノードにより包囲された非ノード画素である場合のある関心のある各箇所は、ブロックのうちの1つの中心と見なされる。次に、これらブロックを並進させて局所類似性基準を最大にし、この基準は、一実施形態では、上述したパターン強度に基づく類似性測度である。
【0069】
ブロックマッチング法では、一般に、ブロック中の各画素が同一の運動を行い、ブロックマッチングアルゴリズムは、代表的には、各ブロックについて運動ベクトルを推定するために用いられると仮定される。一実施形態で用いられるブロックマッチングアルゴリズムでは、それぞれのブロック相互間のパターン強度に基づく類似性の測度を最大にするような仕方で第2の画像中のマッチングブロックについて探索を行う。探索は、類似性測度関数中の最大値の場所についてであり、最大値は、第2の画像中のマッチングブロックの存在を表している。探索を探索窓内で実施するのがよく、この探索窓は、関心のある箇所の周りに定められ、ブロックを含んでいる。
【0070】
どのブロックマッチングアルゴリズムにおいても、探索ストラテジを最適化し、適当なブロックサイズを選択することが重要である。小さなブロックに関し、並進剛体モデルが想定される。剛体回転又は或る他の複雑な変形が存在する場合であっても、ブロックの中心点に関する並進を推定する剛体並進モデルは有効である。または他の変形が、並進に加えて存在している場合、精度は、ブロックサイズの減少につれて増大し、ブロックサイズの増加につれて減少する。しかしながら、小さなブロックサイズを用いた状態では、ミスマッチングの恐れが増大する。一実施形態では、ブロックサイズ選択ストラテジが採用され、このブロックサイズ選択ストラテジでは、変位が大きい場合には大きなブロックが必要とされ、変位が小さい場合には小さなブロックが必要とされるということが想定される。
【0071】
図6は、ブロックマッチングを用いた患者の体内の標的中の関心のある箇所についての局所運動推定法を概略的に示している。図6に示す実施形態では、標的は、脊柱の頸部領域中に配置されている。ただし、この場合も又、非剛体2D/3D画像位置合わせ技術を構造的脊柱追跡以外の用途に使用できることが強調される。左及び右側の絵は、それぞれ、DRR及びx線画像である。小さなブロック203Aが、DRR中の関心のある箇所205の周りに定められている。また、ブロック203を含む探索窓207が、DRR中に定められている。x線画像中のマッチングブロックが、参照符号203Bで図6に示されている。図6に示す実施形態では、探索窓207の寸法は、48mm×48mmであり、ブロックサイズは、15mm×15mmである。単に目視検査により、関心のある箇所205がx線画像中に良好に位置していることが分かる。
【0072】
図7は、マルチレベルブロックマッチングを実施する際、多数の候補者を用いる多重解像度画像表現法を概略的に示している。マルチレベルマッチングは、低いレベルで行われた変位推定値を次の探索段階のための初期結果として用いる迅速な探索法である。マルチレベルブロックマッチングにおける基本的な概念は、最も低い解像度レベルから始まって最も高い解像度レベルまで進んで複数の解像度レベルの各々で次々に画像をマッチさせることにある。最も高い解像度レベルを有する実物大の画像が、レベル1として図7の底部に示されている。情報の画像(レベル2及びレベル3)は、次々に低い空間解像度を有し、最も低い解像度を有する画像は、レベル3として示されている。低解像度の画像は、実物大の画像の低域フィルタリング及び二段抽出法によって得られる。
【0073】
図7では、図面に示されているように、画像ブロックのフルサイズは、レベル1ではW×Hであり、ブロックサイズは、レベル2及びレベル3ではそれぞれ(W/2)×(H/2)及び(W/4)×(H/4)である。最も低い解像度のレベル(レベル3)では、大きな探索レンジを用いて大きな変位の推定を可能にする。解像度レベルの残部では、非常に小さな探索レンジ(−2,+2)を用いる。
【0074】
低い解像度レベルでの結果は、変位の大まかな推定値を求めるのに役立つ。次に、低レベルでの出力を次の高い解像度のレベルに移す。ブロックに関する推定運動ベクトル(大抵の場合、並進ベクトル)は、解像度の高い画像を用いて次々に改善される。最後のマッチング結果では、推定並進の精度は、解像度の最も高い画像(図7にレベル1として示されている)の空間解像度で決まる。
【0075】
マルチレベルマッチングには或る危険性が存在する。低いレベルでの推定値は、局所最大値に収まり、求められている大域的最大値からは遙かに隔たっていることが可能である。この場合、次の解像度の高いレベルでの別のマッチングは、その大域的最大値に収斂することはない。この危険性を解決するため、一実施形態では、多数の候補者が推定のために用いられる。最適なマッチング結果を示した多くの候補者を解像度の低いレベルから解像度の高いレベルに移す。用いられる候補者が多ければ多いほど、推定値の信頼性がそれだけ一層高くなる。一実施形態では、最善の候補者は、類似性測度関数値によってランク付けされる。
【0076】
一実施形態では、パターン強度に基づく類似性測度が、マルチレベルブロックマッチングと関連して用いられる。上述したように、この類似性測度は、共通所有者の第´786号出願明細書、第´787号出願明細書、及び第´785号出願明細書に記載された「FAST 6Dアルゴリズム」の成功に寄与する重要な要素である。一実施形態では、類似性測度は、「実際の」(又は近リアルタイム)x線射影画像とDRR画像との間の差画像を形成し、差画像の各画素にパターン強度関数を適用することにより決定される。具体的に説明すると、差画像Idif(i,j)は、ROI中の術中x線射影画像の各画素値から術中DRR画像の対応の画素値を差し引くことにより形成される。
【0077】
【数4】
方程式(4)において、I(i,j)は、それぞれの画像に関し各画素アレイのi番目の行及びj番目の列のところに位置する画素の画像強度値を表している。具体的に説明すると、Idif(i,j)は、第2の画像の対応の画素値を第1の画像の各画素値から差し引くことにより形成された差画像に関する画素値のアレイを表している。Ilive(i,j)は、物体の第1の画像の(i,j)番目の画素値を表している。IDRR(i,j)は、物体の第2の画像の(i,j)番目の画素値を表している。類似性測度は、この差画像について働き、近傍R内の画素全体にわたる差画像の勾配の漸近関数の和として以下のように表現される。
【0078】
【数5】
上記方程式(5)では、定数Σは、パターン強度関数のための重み係数である。x線画像のばらつきに対する解決策の感度は、この定数の注意深い選択により最小限に抑えることができる。重み係数が大きければ大きいほど、結果の安定性はそれだけ一層高くなる。しかしながら、Σの選択にあたっては、安定性と精度との間には必然的にトレードオフの関係がある。Σの値が大きすぎる場合、類似性測度には画像中の幾つかの小さな細部を反映させることができない。実験に基づき、Σに関する経験的な値は、一実施形態では、約4〜約16である。
【0079】
図8は、パターン強度に基づく類似性測度を計算する近傍Rを概略的に示している。図8から分かるように、図示の実施形態における近傍Rは、差画像の勾配を少なくとも4つの方向(水平方向、垂直方向、45°直交方向、−45°の直交方向)で考えることができるよう定められている。近傍Rをこのように定めた場合、類似性測度に関する方程式(5)は、次のようになる。
【数6】
【0080】
パターン強度に関する方程式(5)及び方程式(6)には、幾つかの利点がある。第1に、差画像は、大部分軟組織から成る低周波数部分を濾過して除去し、主として骨格構造から成る高周波部分を保つ。この特徴により、アルゴリズムは、実際の画像とDRR画像との間の幾分かの輝度強度の差に対して強くなる。第2に、漸近関数により、強度値がその隣りの画素から僅かにずれる画素による測定への影響の度合が少ない。これら形式の画素は、ランダムなノイズを含むものと考えられる。第3に、変数が増大すると漸近関数が素早くゼロに近づくので、大きな強度差、例えば画像アーチファクトは、これらの大きさにも関わらず、類似性測度に対して同一の効果を及ぼす。この特徴により、パターン強度は、画像アーチファクトに対する感度が低い。
【0081】
階層的メッシュ運動推定と一緒にブロックマッチングを用いた局所運動場の推定並びに複数の局所的に推定した運動場からの完全運動場の再構成は、図5に示す流れ図のステップ420〜450で実施される。完全運動場の迅速な生成は、階層的メッシュ追跡を用い、SIMD(単一命令多重データ)技術を用いて画像コンピュータ処理を並行実施することにより達成される。
【0082】
一実施形態では、画像全体の大域的並進(画像の画像中心の並進として測定される)を先ず最初に推定し、次に全ての別の局所運動推定に関する初期推定値として用いる。換言すると、画像全体に関する中心変位について大まかな推定を行い、これを全ての局所変位に関する開始推定値として用いる。図5に戻ってこれを参照すると、術前走査と術中治療との間で標的に関する完全運動場を作る際の第1のステップ(図5において符号420で指示されている)は、画像全体に関する大域的並進を推定し、又は、均等例として、画像の中心変位を推定するステップである。
【0083】
図9は、DRRの画像中心と対応のx線画像の画像中心との間の大域的運動(この場合、並進だけ)の推定法を示している。図示の実施例では、画像中心は、ブロック中心として用いられている。大域的並進推定ステップは、このステップ中の失敗がどのようなものであれ、局所運動推定プロセスの残部に影響を及ぼすので非常に重要である。ミスマッチングの発生の恐れを阻止するため、図示の実施形態では、非常に大きな画像ブロックが用いられている。最大追跡範囲をブロックサイズと画像サイズ全体との間の差として計算するのがよい。例えば、マッチングサイズが80×80mmである場合、最大追跡並進量は、60mmである。図9に示す実施形態では、サイズが160×160画素(64mm×64mm)を有するブロックが用いられている。図示の実施形態の探索窓は、画像全体である。図示の実施形態の最大追跡範囲は、(−50mm,+50mm)である。
【0084】
大域的運動推定後、次のステップ430(図5参照)は、メッシュ運動推定である。このステップでは、局所運動を多数のレベルで推定するために階層的2Dメッシュ構造を設計する。公知のように、2Dメッシュ(又は2Dメッシュグリッド)は、多角形パッチ又は要素への2D領域のモザイク化を意味しており、これらパッチ又は要素の頂点は、メッシュノードと呼ばれている。一般に並進運動だけを想定しているブロックマッチングアルゴリズムとは異なり、2Dメッシュモデルは、物体の並進に加えて、画像化された物体の回転、スケール変更及び変形をモデル化する空間的変換を可能にする。したがって、ブロックマッチングアルゴリズムと比較して、メッシュを利用した方法は、運動場のより正確な表示を生じさせることができ、例えば、連続して変化する運動場を生じさせることができる。
【0085】
図10は、標的が脊柱の頸部領域内に位置している実施形態では、標的領域のDRRについて作られたメッシュグリッド300及び標的領域のx線画像について作られた対応のメッシュグリッド302を概略的に示している。2Dメッシュでは、各メッシュ要素又はパッチ内の運動補償は、画像相互間の空間的変換を求めることにより達成でき、この場合、変換パラメータは、ノーダル運動ベクトルから、即ち、メッシュの頂点のところに位置するメッシュノードについて推定された運動ベクトルからコンピュータ処理される。換言すると、メッシュを利用した運動推定は、第1の画像収集における1組のメッシュ要素を第2の画像収集における別の組のメッシュ要素上に最適マッピングする空間変換を見出すことからなる。
【0086】
特に、メッシュ運動推定は、他方の画像中の対応のメッシュ要素の頂点を見出し、即ち、他方の画像の対応のメッシュノードを見出して誤差を運動場全体に関して最小限に抑えることから成る。代表的には多数のメッシュノードが一画像中に選択され、他方の画像中の対応のメッシュノードが推定される。メッシュ要素内に位置する(メッシュ要素の頂点のところに位置するのとは対照的に)画素の場合、異なる画像収集相互間のマッピングは、補間によって行われる。かかる画素に関する局所運動ベクトルを推定するのに、画素を包囲するメッシュノードについて推定されたノーダル運動ベクトルからの補間を行う。
【0087】
一実施形態では、階層的メッシュ運動推定を実施するのがよい。階層的メッシュ運動推定という表現は、ノーダル運動が複数のメッシュ解像度レベルの各々についてメッシュ構造を特定するメッシュノードについて推定することを意味する。粗いメッシュで行われた運動推定は、メッシュの次の(より細かい)解像度レベルについての初期化をもたらす。各メッシュモードの運動を推定するため、マルチレベルブロックマッチングを行うのがよい。
【0088】
図11は、メッシュ運動推定中におけるメッシュ階層を示している。図11から分かるように、メッシュ階層は、比較的粗いメッシュ320から始まり、符号322,324として示された細かいメッシュに進む。大域的並進(初期推定値として図5のステップ420で推定されている)を用い、最も粗いメッシュの頂点のところに位置するメッシュノードについてのノーダル運動を先ず最初に計算する。次に、これら推定値を次の細かいメッシュ上に渡す。各レベルでは、より小さな探索範囲を用いてノーダル運動を更新する。最後に、メッシュ解像度レベルのうちの最後の1つ(最も細かいメッシュ解像度レベルであることを特徴とする)のところのメッシュノードに関する運動ベクトルを改善する。ノード全てに関し、多数の候補者によるマルチレベルブロックマッチングを方程式(5)及び方程式(6)で与えられたパターン強度に基づく類似性測度と一緒に用いる。
【0089】
図12は、ノード推定を粗いメッシュの解像度レベルから細かいメッシュの解像度レベルに引き渡す方式を概略的に示している。第1のレベル後の各メッシュの解像度レベルでは、メッシュノードは、1)先のメッシュ解像度レベルのところで生じたメッシュノードと2)現在のメッシュ解像度レベルのところに新たに付け加えられたメッシュノードの両方を含む。図示の実施形態では、ノーダル運動ベクトル及び現在のメッシュのところの新たに付け加えられたノードに関する初期推定は、先のメッシュ解像度レベルのところの既存のノーダル運動ベクトルの直線補間によって得られる。このプロセス中、信頼性の無いメッシュノードを検出する必要があり、信頼性のあるノードだけを次のメッシュレベルに渡すようにする。
【0090】
図12は、図12に記載したメッシュノードを「ノード5」として用いてかかる検出をどのようにすれば実施できるかを示している。図示の実施形態では、ノード5の運動ベクトル(この場合、並進ベクトル)とその9個の周りのノード(図12のノード1〜4,6〜9)からコンピュータ処理された中央運動(並進)との間の差を取る。図12から分かるように、ノード2の並進は、ノード1及びノード3の並進の平均であり、ノード4の並進は、ノード1及びノード7の並進の平均であり、ノード6の並進は、ノード3及びノード9の並進の平均であり、ノード8の並進は、ノード7及びノード9の並進の平均である。ノード5の並進は、ノード1、ノード3、ノード7及びノード9の並進の平均である。ノード5の並進とその9個の隣のノードからコンピュータ処理された中央並進との間の差があらかじめ定められたしきい値よりも小さい場合、ノード5は、信頼性のあるノードと見なされる。さもなければ、このノードは、信頼性の無いノードとして見なされ、その並進は、中央値で置き換えられて次のメッシュに渡される。
【0091】
大抵のメッシュノードに関し、運動の推定は、信頼性があり且つ正確である。ミスマッチングが生じる場合があり、推定が信頼できない場合がある数個のノードの場合、並進は、周りのノードの並進により再構成される必要がある。したがって、図15の位置合わせアルゴリズム流れ図における次のステップは、運動場再構成のステップ440であり、このステップ中、運動場は、ミスマッチングが生じるノードに関し、周りのノードから再構成される。不正確なノーダル運動ベクトルを検出するのに3×3中央値フィルタリングを用いるのがよい。
【0092】
局所運動推定は、局所画像内容に依存している。幾つかのスムーズな局所領域では、ミスマッチングが生じる場合がある。メッシュ運動推定中、大抵のノードにおける推定は、相当に正確である。ミスマッチングが生じる僅かなノードに関し、運動は、これらの周りのノードから再構成されるべきである。アプリオリにより知られていることは、骨及び組織の物質一致性であり、したがって、局所運動の平滑度である。換言すると、推定した局所運動ベクトルは、物質一致性により平滑且つ連続であると考えられる。この物理的な観点に基づく平滑度拘束を課すことにより、費用関数を作って運動場を再構成する。
【0093】
一実施形態では、費用関数は、数学的に次のように表される。
【数7】
上記方程式(7)において、E(d)は、費用関数を表し、dは、座標(x,y)のところのノーダル運動ベクトルに関する所望の局所推定値、uは、座標(x,y)のところの局所的に推定されたノーダル運動ベクトルを表し、βは、0から1の範囲にある信頼性定数を表し、β=0は、信頼性の無い推定を示し、β=1は、信頼性のある推定を示している。
【0094】
メッシュグリッドに対する導関数の有限差を行うことにより、方程式7における費用関数についての離散化形態は、次のように表される。
【数8】
上式において、ui,jは、局所的に推定された並進を表し、di,jは、所望の局所運動を表し、βi,j=1は、推定が信頼性がある場合を示し、βi,j=0は、推定に信頼性が無い場合を意味している。
【0095】
方程式(8)の右側の第1項は、再構成における観察されたデータに対する信頼度を反映している。第2項は、平滑度拘束を2つの空間方向で運動場に課す。
【0096】
方程式(8)により与えられる費用関数の最小化の結果として、次の同時線形方程式系が得られる。
【数9】
一実施形態では、早くて収束性の逐次過緩和法(SOR)の対話型アルゴリズムを用いて次のように方程式を解く。
【数10】
【0097】
ノーダル運動ベクトルを全てメッシュノードの全てのところでいったん評価すると、ROI内の任意の箇所(又は画素)に関する並進を補間法によりコンピュータ処理するのがよい。図13は、関心のある箇所についての運動ベクトルを補間法により周りの濃度から求める方法を概略的に示している。図示の実施形態では、9つの最も近いノードを用いて2次補間を行い、9つの形状関数を用いる。
【0098】
9つのノードについて運動ベクトル(dx(i),dy(i))であると仮定すると、関心のある箇所における運動ベクトル(dx,dy)は、以下の方程式を用いることによりコンピュータ処理される。
【数11】
上式において、N(i)は、ノード(i)についての形状関数であり、i=1,2,...,9の場合のN(i)は、次のように与えられる。
【数12】
【0099】
上述したステップ420,430,440を用いてROI内の複数の関心のある領域について局所運動ベクトルを推定することができる。完全運動場は、運動推定のために選択された多くの関心のある箇所について推定される局所運動ベクトルの全ての複合又は重ね合わせとして得られる。図14は、標的が脊柱の頸部領域内に位置する実施形態では、完全運動場(多くの推定された局所運動ベクトルから再構成される)をベクトルの形態で概略的に示している。
【0100】
画像位置合わせプロセス中の最終ステップは、標的局所化、即ち、求めた完全運動場から標的の並進及び回転を導き出すことである。一実施形態では、非剛体画像位置合わせは、それぞれの画像収集における互いに異なる座標系相互間の射影マッピング又は変換を決定して同一の解剖学的箇所に相当する各空間中の箇所を互いにマップするようにしようとする。一実施形態では、変換は、1組の非剛体変換パラメータ(dxT,dyT,dzT,r,p,w)によって表され、ここで、(dxT,dyT,dzT)は、標的の並進を表し、(r,p,w)は、標的の回転を表す。
【0101】
一実施形態では、2つの直交x線射影をこれら6つのパラメータについて解く。この実施形態では、各射影における位置合わせを個々に実施し、各射影に関する位置合わせの結果を次に組み合わせて6つの3D変換パラメータを得る。しかしながら、他の実施形態では、互いに異なる射影又はこれらの組合せを用いて変換パラメータについて解いてもよい。
【0102】
図15は、一実施形態による非剛体画像位置合わせ法において三次元治療標的と2つの直交2Dx線射影(図15においてA,Bで表示されている)との間の幾何学的関係を示している。1対のカメラ(又は画像レシーバ)A,Bが、それぞれのx線源(図示せず)からこれらのx線射影を受け取る。3D走査の座標系では、x軸は、紙面の内方に向けられ、図15では指示されていない。上述したように、治療標的の位置の変化は3つの並進及び3つの大域的剛体回転(dx,dy,dz,r,p,w)で表される。
【0103】
図15では、直交2D射影A,Bは、それぞれ、方向OASA,OBSBから見える。射影A,Bの各々に関し、図15は、各射影を特徴付ける画像平面に対して固定されたそれぞれの2D平面座標系を示している。かくして、射影A,Bに関する画像平面A,Bは、それぞれの座標系内の相互に直交した軸線によって規定される。これら軸線は、図15に、射影Aについては(xA,yA)、射影Bについては(xB,yB)として示されている。射影Aに関する2D座標系内における軸線xAの方向と3D走査座標系内におけるx軸の方向は、互いに逆である。射影Bに関する座標系内の軸線xBの方向と3D走査座標系内における軸線xの方向は、同一である。
【0104】
射影Aに関し、2D運動場(dxA,dyA)は、画像平面A上に射影されたx線画像を対応の基準DRR画像に位置合わせすることにより推定される。射影Bに関し、2D運動場(dxB,dyB)は、画像平面B上に射影されたx線画像を対応の基準DRR画像に位置合わせすることにより推定される。射影Aに関し3D運動場(dxA,dyA)、射影Bについて2D運動場(dxB,dyB)とすると、3−D標的並進(dxT,dyT,dzT)並びに大域的剛体回転(r,p,w)を明快な数学的操作により射影A,Bに両方について得ることができる。
【0105】
図5に戻ってこれを参照すると、射影Aについて2D局所運動場(dxA,dyA)であり、射影Bについて2D局所運動場(dxB,dyB)であるとすると、以下の方程式を用いて3−D標的並進(dxT,dyT,dzT)をステップ455(図5に示されている)で容易に得ることができる。
【数13】
【0106】
大域的剛体回転(r,p,w)を射影Aの運動場(dxA,dyA)及び射影Bの運動場(dxB,dyB)から計算することができる。標的を回転中心として用いると、大域的剛体回転は、初期の患者位置合わせ及び治療中、位置及び回転の修正及び補償に役立つ。標的並進が既に計算されているので、大域的並進の計算は不要である。3つの回転を3D患者座標で得るため、先ず最初に、3つの2D平面内回転をコンピュータ処理し、かかる平面内回転としては、射影A,Bにおけるそれぞれの平面内回転θA,θB及び上下軸線に垂直な平面内における平面内回転θxが挙げられる。近似的に、大域的回転を次のように表すことができる。
【数14】
【0107】
θA,θBの推定は、それぞれ射影A,Bにおける2D回転場に直接基づいている。θxを推定するため、先ず最初に標的箇所を通り、3D患者座標系中の軸線xに垂直である平面を定める。次に、射影A,Bのそれぞれの2つの回転場(xA,yA)及び(xB,yB)から運動場を計算する。
【0108】
(dx,dy)が対応の座標(x,y)内における運動場であり、θが大域的回転であると仮定すると、回転が僅かな場合(<10°)、以下の変換方程式が有効である。
【数15】
【0109】
多くの箇所で(dx,dy)及び(x,y)が与えられていると、次の最小二乗最小化法を用いてθを容易に計算することができる。
【数16】
上記方程式(14)及び方程式(16)を用いると、図5に示すステップ160において平均剛体変換パラメータを得ることができる。
【0110】
上述したように得られた非剛体位置合わせの結果を用いると、治療放射線投与中、4D数学的モデルを用いると共に放射線の投与中呼吸(又は他の運動)サイクルをモニタすることにより標的の動的追跡を実施することができる。図16は、患者の呼吸運動を時間の関数としてモニタする表面マーカ340(例えば、赤外LED)を用いて呼吸している患者の体内の運動中の標的を治療用放射線の投与中、動的に追跡する方法を概略的に示している。表面マーカを図16に示す実施形態に関して説明するが、他の実施形態では、患者の表面を追跡するのに他の技術を用いることができる。これら技術としては、ビデオシステム、レーザスキャナ、超音波(又は他の音響)スキャナ及び心拍動を追跡する場合には心電図が挙げられるが、これらには限定されない。患者の表面を追跡するために当該技術分野で知られている任意の方法及び装置を使用できる。
【0111】
治療用放射線の投与中における標的210(即ち、腫瘍/病変部210)の動的追跡は、4D治療計画立案中に得られた4D数学的モデルと無基準手段型追跡により提供された位置合わせ情報を組み合わせ、表面マーカを用いて患者の呼吸運動をモニタすることにより達成できる。上述したように、治療計画立案中に得られた4D数学的モデルは、骨格構造230,232の存在場所を標的210の存在場所に関連付ける。
【0112】
図16に概略的に示すように、無基準手段型追跡を4D計画立案及び表面マーカの動的追跡と関連して用いる場合、動的追跡への多くのアプローチが可能である。第1のアプローチでは、先ず最初に、表面マーカ340を用いて呼吸サイクル中の瞬間を定める。次に、非剛体無基準手段型追跡を用いて剛体基準構造232の存在場所を突き止めることができる。次に、非剛体画像位置合わせを用いて決定された基準存在場所からベクトルを描くことにより腫瘍/病変部210の存在場所を追跡する。表面マーカ340を用いて得られた呼吸サイクル中の瞬間の知識及び標的210の存在場所を剛体骨格構造232の存在場所に関連付ける4D治療計画立案から得られたモデルを用いて存在場所が非剛体画像位置合わせ中に得られた剛体基準構造232からベクトルを描く。
【0113】
第2のアプローチでは、無基準手段型追跡から得られた基準構造232,230の存在場所を用いると共に基準構造232,230の存在場所を4D治療計画立案から得られた病変部210に関連付けるモデルを用いて腫瘍/病変部210の存在場所を突き止める。次に、表面マーカ340の運動を病変部210の運動に関連付ける数学的モデルを構築する。画像処理技術においては、当該技術分野においては、第1の形式の物体の運動を第2の形式の物体の運動に関連付け、かかる関係を数学的モデルにより説明することが知られている。公知であって市販されている場合のあるアルゴリズム又はソフトウェアを用いると、表面マーカ340の運動を病変部210の運動に関連付ける数学的モデルを構築することができる。
【0114】
第3のアプローチでは、4D計画立案中に得られた4Dモデルから決定された基準構造の存在場所を用いて補間法により病変部の存在場所を突き止める。次に、表面マーカ340の運動を病変部210の運動に関連付ける数学的モデルを構築する。この第3のアプローチでは、治療計画立案から得られた4−D計画立案モデルへの依存性が最も低い。
【0115】
最後のアプローチでは、上記段落に記載した2D/3D位置合わせ技術を用いて腫瘍又は病変部210を直接追跡する。このアプローチでは、2D/3D位置合わせの結果だけを用いて表面マーカの運動を標的210の存在場所に関連付けるモデルを直接構築することができる。
【0116】
上述のアプローチのうちの1つを用いて標的の存在場所をいったん突き止めると、放射線ビーム投与を実施するのがよい。先の段落で説明したように突き止められた運動中の解剖学的領域内の標的のリアルタイム存在場所は、ビーム投与のための案内となる。治療計画立案中、当初、ビーム軌跡を、恐らくは運動サイクルをカバーするよう収集された幾つかのCT画像のうちの1つに関して配向するよう選択された名目上の患者座標系に関して規定する。運動サイクル中のこの時点は、表面マーカの運動を分析することにより求められ、各放射線ビームは、この時点からターンオンされることになる。
【0117】
図17は、サイクルPを有する周期運動を行っている解剖学的領域内の標的210を動的に追跡し、治療用放射線を運動中の標的に投与するための装置500の概略ブロック図である。標的としては、腫瘍又は病変部が挙げられる。解剖学的領域としては、標的210に加えて基準構造が挙げられる。基準構造は、周期運動中動かない剛体基準構造232及び解剖学的領域の周期運動中それ自体動く基準構想230を含むのがよい。
【0118】
概要を説明すると、装置500は、周期的に運動している解剖学的領域内の基準構造230又は232に対する標的210の存在場所をリアルタイムで突き止める標的ロケータ510と、4D治療計画を運動中の解剖学的領域に関するサイクルP内における時間的相対位置の関数として作成する4D治療計画立案発生器520と、治療用放射線を治療計画に従って標的にリアルタイムで投与する治療ビーム発生器524とを有している。治療計画は、標的にリアルタイムで投与されるべき所望の放射線量分布を処方し、他方、周期運動中の解剖学的領域の変形を計算に入れている。治療計画立案発生器520を治療放射線投与コントローラ(図示せず)に接続するのがよく、この治療放射線投与コントローラは、治療計画立案発生器520によって作成された治療計画に従って放射線の投与を制御する。
【0119】
また、ロボットシステム(図示せず)が設けられるのがよく、このロボットシステムは、代表的には、固定ベース及び間接連結アーム組立体を有し、このアーム組立体の遠位端部のところには、治療ビーム発生器(例えば、x線源、例えばリナック(線形加速器))が取り付けられるのがよい。ロボットシステムは、投与コントローラ及び治療ビーム発生器(即ち、x線リナック)の方向に応答して移動することができる(そして、配向することができる)。ロボットシステム及び治療ビーム発生器は、例えば共通所有者の米国特許第5,207,223号明細書及び米国特許出願第10/814,451号(代理人事件番号:ACCL−120)明細書に詳細に説明されており、これら特許文献を参照により引用し、これらの記載内容全体を本明細書の一部とする。
【0120】
一実施形態では、標的ロケータ510は、3Dスキャナ520と、DRR発生器530と、x線画像化システム540と、画像位置合わせサブシステム550と、1つ又は2つ以上の運動センサ560と、4Dモデル発生器570と、標的存在場所コンピュータ580とを有している。3Dスキャナ520は、サイクルP内における一連の時点tj(j=1,...,p)の各々において解剖学的領域の複数の3D画像ij(j=1,...,p)を生じさせる。これら3D画像としては、3D CT走査、3D MRI走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査が挙げられるが、これらには限定されない。したがって、3Dスキャナ520は、3D CTスキャナ、3D PETスキャナ、3D MRIスキャナ及び3D超音波スキャナのうち1つであるのがよい。
【0121】
時点tj(j=1,...,p)は、好ましくは、解剖学的領域の周期運動の全範囲を実質的に含むよう選択される。例えば、時点としては、サイクルPの山に相当する第1の時点、サイクルPの谷に相当する第2の時点、及びサイクルPの山と谷との間の中間位置に位置する第3の時点が挙げられる。例えば表面マーカであるのがよい運動センサ560は、解剖学的領域の周囲運動をモニタし、サイクルPを測定する。このように、運動センサ560は、サイクルP内における1つ又は2つ以上の所望の時点の相対位置を表す時間位置データを生じさせる。
【0122】
DRR発生器530は、仮定的放射線を体積3D走査データ中に差し向け、各放射線に沿う3D走査データを統合することにより、各時点tjにおいて3D走査データからDRRを再構築する。x線画像化システム540は、ビームが解剖学的領域の少なくとも一部を横切った後にx線画像化ビームを検出することにより運動中の解剖学的領域内の標的及び基準構造の近リアルタイム2Dx線射影画像を生じさせる。これらx線画像化ビームは、DRRを生じさせるのに用いたのと同一のビーム射影幾何学的形状から生じる。画像位置合わせサブシステム550は、基準構造及び(又は)標的の近リアルタイムx線射影画像を基準構造及び(又は)標的のDRRに位置合わせし、それにより、基準構造及び(又は)標的の存在場所を突き止める。一実施形態では、画像位置合わせサブシステム550は、1)DRR内のROI(関心のある領域)を選択するよう構成されたROIセレクタ620、ROIは、治療標的及び好ましくは少なくとも1つの基準構造を含む、2)フィルタ演算子をDRR及びx線画像に適用することによりDRR及びx線画像を強調するよう構成された画像エンハンサ630、3)DRRとx線画像との間の類似性の測度を求めるよう構成された類似性測度カルキュレータ(計算器)640、4)類似性測度を用いて複数の解像度レベルの各々に関し、ROI内の1つ又は2つ以上の2D局所運動場を推定することにより3D完全運動場を発生させるよう構成された運動場発生器650、5)DRRに示すような治療標的の位置及び向きと比較して、x線画像に示されているような治療標的の位置及び向きの差を表す1組の非剛体変換パラメータを3D完全運動場から求めるよう構成されたパラメータデターミナ(決定器)660を有する。
【0123】
4Dモデル発生器570は、運動中の解剖学的領域内の基準構造232に対する標的210の運動をサイクルP内における時間の関数として説明する4Dモデルを生じさせる。標的存在場所コンピュータ580は、4Dモデル発生器570によって作成された4Dモデルを用いて標的の存在場所と画像位置合わせサブシステム550により突き止められた基準構造の既知の存在場所を相関させ、運動センサ560により得られた時間位置データを用いてサイクルP内における各所望の時点の相対位置を突き止める。
【0124】
一実施形態では、4Dモデル発生器570は、解剖学的領域の変形及び運動をサイクルP内での時間的位置の関数として説明する数学的モデルを構築するよう構成された変形モデル構築器575から成る。この実施形態では、4Dモデル発生器570は、変形モデル構築器により構成された数学的モデルから4Dモデルを導き出す。変形モデル構築器575は、3Dスキャナ520により生じた複数個の画像Ijから、解剖学的領域の変形及び運動に関する情報を含む変形データを引き出す。
【0125】
一実施形態では、変形モデル構築器575は、サイクルP内における時点tjにおいて撮られた各画像とサイクルP内における引き続く時点tj+1で撮られた引き続く画像を位置合わせすることによって変形データを複数の画像から引き出す。変形データに含まれる情報は、基準構造に対する標的の位置及び向きの変化に関する情報を含む。変形モデル構築器575は、運動センサ560からの時間位置データと一緒に変形データを用いて各時点tjについて、サイクルP内における時点tjの相対位置と時点tjにおける標的の変形及び運動を数学的に相関させるよう構成されている。
【0126】
4Dモデル発生器570により作成された4D数学的モデル、画像位置合わせサブシステム550により実施された非剛体画像位置合わせの結果、及び運動センサ560により求められた呼吸サイクル中の時間的相対位置を用いて、標的存在場所コンピュータ580は、治療/病変部の存在場所をコンピュータ処理する。
【0127】
4Dモデル発生器570により作成された4D数学的モデルを用いて、4D治療計画発生器520は、非剛体的に運動している解剖学的領域中への連続放射線ビーム投与に起因する所望の放射線量分布を生じさせる。最後に、治療ビーム発生器524は、所望の放射線量分布に従って治療ビームを発生させ、これら治療ビームをリアルタイムで標的に投与する。
【0128】
以上要するに、例えば周期運動、例えば呼吸に起因して動く解剖学的構造中の腫瘍/病変部を動的に追跡する多くの技術を開示した。これら技術は、関心のある腫瘍/病変部の動的追跡を達成するために、4D治療計画立案、骨格構造又は標的の無基準手段型追跡、及び患者の数学的モデルによる表面マーカの動的追跡を組み合わせている。
【0129】
本発明を特定の実施形態と関連して具体的に図示すると共に説明したが、本発明の精神及び範囲から逸脱することなく、本明細書において説明すると共に図示した技術及び構造の形態及び細部における多くの改造及び変形を行うことができることは理解されるべきである。したがって、本明細書において説明すると共に図示した技術及び構造は、例示であるに過ぎず、本発明の範囲を限定するものと理解されてはならない。本発明の範囲は、特許請求の範囲に基づいて定められ、かかる範囲は、本願の出願時点における公知の均等例及び予測不可能な均等例を含む。
【図面の簡単な説明】
【0130】
【図1】可動標的の基準手段を用いない動的追跡方法の概略流れ図である。
【図2】患者の呼吸サイクル中の互いに異なる時点で撮られた患者の解剖学的構造中の可動標的の術前画像(例えば、3D CT走査)の収集状態を概略的に示す図である。
【図3】a)呼吸につれて動くことはない剛体基準構造及びb)呼吸につれてそれ自体動く多数の基準構造のうちの一方を用いて患者の呼吸サイクルの関数として標的の3D運動の追跡状態を概略的に示す図である。
【図4】標的の2D近リアルタイムx線画像を患者の呼吸サイクル中の特定の時点で撮られた術前3D走査から得られたDRRに位置合わせすることにより治療放射線の投与中における可動標的の無基準手段型追跡方法を概略的に示す図である。
【図5】術前2D DRRと術中x線射影画像との間の2D/3D位置合わせのために使用できる非剛体画像位置合わせアルゴリズムの流れ図である。
【図6】患者の体内における標的内の関心のある箇所について局所運動を推定する際のブロックマッチングの使用法を概略的に示す図である。
【図7】多数の候補者を用いて一実施形態においてマルチレベルブロックマッチングを実施するための多重解像度画像表現法を概略的に示す図である。
【図8】パターン強度に基づく類似性測度を計算するための近傍Rを概略的に示す図である。
【図9】DRRの画像中心と対応のx線画像の画像中心との間の大域的変換の推定法を示す図である。
【図10】標的が脊柱の頸部内に位置する実施形態における標的のDRRについて設定されたメッシュグリッド及び標的のx線画像について設定された対応のメッシュグリッドを概略的に示す図である。
【図11】メッシュ運動推定中のメッシュ階層、比較的粗いメッシュから始まって細かいメッシュに進行しているメッシュ階層を示す図である。
【図12】粗いメッシュ解像レベルから細かいメッシュ解像レベルへのノード推定の経過状態を概略的に示す図である。
【図13】周囲ノードからの補間法による関心のある箇所に関する運動ベクトルの決定法を概略的に示す図である。
【図14】推定した多くの局所運動ベクトルから再構成された完全運動場をベクトル形式で概略的に示す図である。
【図15】3次元治療標的と2つの直交した2Dx線射影像との間の幾何学的関係を示す図である。
【図16】患者の呼吸運動をモニタする表面マーカ(例えば、LED)を用いる治療放射線のリアルタイム投与中における患者の体内の可動標的の動的追跡法を概略的に示す図である。
【図17】周期運動(例えば、呼吸又は心拍動)を行なっている解剖学的領域内の標的を動的に追跡し、治療用放射線を運動中の標的に投与するシステムの概略ブロック図である。
【技術分野】
【0001】
本発明は、運動中の標的の動的追跡に関する。
【背景技術】
【0002】
幾つかの医学的用途では、時間が経つにつれ動く標的を動的に追跡することが必要な場合がある。例えば、放射線外科手術では、呼吸及び(又は)心拍動につれて動く人体内の腫瘍及び(又は)病変部を動的に追跡することが望ましい場合がある。放射線外科手術では、治療計画立案時間中にコンピュータ処理された放射線量分布を達成するために患者の解剖学的構造を通って治療対象の病変部又は腫瘍への放射線ビームの正確な軌跡が重要な場合がある。例えば呼吸又は心拍動に起因して動く人体の解剖学的構造の領域に関し、作成中の治療計画に対するこの運動の影響をコンピュータ処理する際にかかる運動を考慮に入れることが重要である。動的追跡は、解剖学的構造の部分が呼吸、心拍動又は任意他の種類の運動に起因して動く放射線外科手術以外の用途においても有用な場合がある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
過去においては、解剖学的構造の運動中の領域を追跡するために基準マーカが用いられていた。基準手段を利用した追跡は、多くの理由で患者にとって困難な場合がある。例えば、骨に植え込まれた基準マーカを用いることにより高い精度が達成される傾向があるが、侵襲性の低い方法、例えば皮膚に取り付けられたマーカ又は解剖学的位置は、正確度が低い傾向がある。基準手段を患者の体内に植え込むことは、特にC字形脊椎の場合一般に有痛性であって困難であり、このための植え込みプロセスは、臨床上の合併症を招く場合が多い。
【0004】
解剖学的構造の運動を取り扱うためのゲーティングを用いる幾つかの方法では、内部に植え込まれた基準手段とリアルタイムで追跡される外部に配置されたマーカとの間の関係を確立することにより動的追跡が達成される場合がある。これら方法は、周りの解剖学的構造の非剛体運動及び変形を運動サイクルの関数として計算に入れてはいない。
【0005】
かくして、これら欠点を解決する方法及びシステムが要望されている。特に、運動中の標的を動的に追跡する信頼性があって効率的な方法及びシステムを提供することが望ましい。
【課題を解決するための手段】
【0006】
解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して解剖学的領域が運動を行なっている間、所望の線量の治療用放射線を標的に投与することができるようにする方法及びシステムが提供される。標的は、例えば、腫瘍又は病変部であるのがよい。解剖学的領域としては、標的に加えて1つ又は2つ以上の基準構造が挙げられる。運動中の解剖学的領域内の標的の存在場所は、解剖学的領域がその運動中に生じる変形を計算に入れながら基準構造に対して突き止められる。解剖学的領域の変形としては、非剛体変形並びに剛体変形が挙げられる。
【0007】
一実施形態では、解剖学的領域の運動は、周期的な場合がある。かかる周期運動の例としては、例えば、呼吸又は心拍動が挙げられる。周期運動は、周期的なサイクルPを有することを特徴としている場合がある。他の実施形態では、解剖学的領域の運動は、サイクルPが時間の経過につれて変化する場合があり又はサイクルPを特定し得ない無周期運動である場合がある。本明細書全体を通じ、「周期運動」及び「サイクルPの周期運動」という用語としては、時間で変動する周期P(t)を有する周期運動が挙げられる。換言すると、「周期運動」及び「サイクルPの周期運動」という用語は、人体の解剖学的構造中の運動の性質が変化するものであることを説明しているものとしてこのことに言及していると理解されるべきである。
【0008】
一実施形態では、サイクルPの周期運動の動的追跡は、解剖学的領域の非剛体変形及び非剛体運動をサイクルP内における時間的相対位置の関数として説明する4D(4次元)数学的モデルを構築することにより達成される。4D数学的モデルは、解剖学的領域の複数個の画像(CT画像が挙げられるが、これには限定されない)Ij(j=1,...,p)を生じさせることにより構築でき、この場合、各画像は、サイクルP内における一連の時点tj(j=1,...,p)のうちの一時点で撮られる。サイクルPの関数としての解剖学的領域の連続非剛体変形は、或る一時点で得られたCT画像を次の一時点で得られた別のCT画像中にモーフィングすることにより数学的にモデル化される。4D数学的モデルは、骨格構造の3D(3次元)存在場所をサイクルP(これは、例えば、呼吸サイクル又は心拍動サイクルであるのがよい)内の時点の関数として標的の3D存在場所に関連付ける。
【0009】
一実施形態では、非剛体変形の4D数学的モデルは、運動中の解剖学的領域内の標的にリアルタイムで投与されるべき治療用放射線の所望の量を処方する放射線量分布を作成する治療計画発生器によって用いられる。放射線量分布は、解剖学的領域のその周期運動中における非剛体変形を計算に入れている。
【0010】
周期運動のサイクルPは、例えば、解剖学的領域の皮膚又は外面に取り付けられた運動センサ(例えば、表面マーカ又はLED(発光ダイオード))を動的に追跡することにより求めることができる。j番目の画像Ijが撮られた時点tjを含む任意所望の時点の運動サイクルP内の相対位置をこのようにして突き止めることができる。
【0011】
本明細書においては、「リアルタイム」という用語は、実際の放射線治療及び投与と実質的に同時であるタイムスケールを意味している。例えば、少なくとも数Hz又はこれよりも高い周波数の速度で生じる追跡は、本明細書においては「リアルタイム」として説明されるタイムスケールに属する。本明細書においては「近リアルタイム」という用語は、「リアルタイム」と呼ばれるタイムスケールよりも遅い、例えば、ほぼ1桁又はそれ以上の桁だけ遅いタイムスケールを意味している。例えば、一度に約1秒未満の速度で生じる事象は、本明細書においては「近リアルタイム」と呼ばれるタイムスケールに属する。
【0012】
一実施形態では、基準構造の近リアルタイム存在場所は、基準手段を用いない(fiducial-less )(以下、「無基準手段型」という場合がある)基準構造の追跡を行なうことにより突き止められる。実際のx線画像を得るために用いられるのと同一のビーム射影幾何学的形状を用いて1組のDRRをCT画像データから生成する。術中に近リアルタイムで得た実際のx線画像をDRR(ディジタル方式で再構成されたエックス線像)に位置合わせする。一実施形態では、非剛体変換パラメータが3D完全運動場から導き出される非剛体画像位置合わせアルゴリズムを用いるのがよい。完全運動場は、多くの局所運動ベクトルを推定することにより構成できる。一実施形態では、マルチレベルブロックマッチングを、パターン強度を利用した類似性測度(similarity measure)と関連して非剛体画像位置合わせアルゴリズムに用いるのがよい。一実施形態では、階層的メッシュ運動推定法を実施するのがよい。
【0013】
一実施形態では、非剛体画像位置合わせ法を用いて突き止められた基準構造の既知の近リアルタイム存在場所と、標的の存在場所は、基準構造の存在場所にどのように関連付けられるかをサイクルP内における時間的相対位置の関数として説明する4D数学的モデルを用いて求められている標的の存在場所を相関させることによりリアルタイムで突き止め可能である。運動センサからの情報を用いると、任意所望の時点におけるサイクルP内の相対位置を突き止めることができる。
【0014】
一実施形態では、治療計画立案発生器により得られた放射線量分布に従って放射線治療を標的のリアルタイム存在場所に適用する。放射線ビーム投与を治療計画立案の際に突き止められた呼吸サイクル中の瞬間又は時点に同期させるのがよい。
【発明を実施するための最良の形態】
【0015】
運動を行っている人体内の腫瘍/病変部を動的に追跡する多くの技術を説明する。かかる方法は、主として放射線外科手術に用いられる方法であるが、呼吸又は心拍動のために運動する解剖学的構造の種々の部分を動的に追跡することが必要な他の用途においても有用な場合がある。
【0016】
以下の詳細な説明の中には、アルゴリズム及びコンピュータ記憶装置内のデータビットに関する操作の記号による表示に関して提供されている部分がある。これらアルゴリズムによる説明及び表示は、データ処理分野における当業者によりかかる当業者の仕事の実質を他の当業者に最も効果的に伝えるために用いられている手段である。アルゴリズムは、所望の結果をもたらすステップの自己一貫性のあるシーケンスであると考えられる。これらステップでは、物理的量の物理的操作が必要である。通常、必要ではないが、これらの量は、ストレージされ、転送され、組み合わされ、比較され、違ったやり方で操作できる電気又は磁気的信号の形態を取っている場合がある。これら信号をビット、値、要素、記号、文字、用語、数等として言及することが、主として共通の使用法のために時々において有利であることが判明した。
【0017】
しかしながら、念頭に置いておくべきこととして、これら用語及び類似の用語は全て、適当な物理的量と関連すべきであり、これら量に付けられた単に便宜上の表示である。特段の指定が無ければ、以下の説明全体を通じ、例えば「処理」又は「コンピュータ処理」又は「計算」又は「突き止め」又は「表示」等の用語を利用する説明は、コンピュータシステム又はこれに類似した電子コンピュータ処理装置の動作及びプロセスに関するものである。コンピュータシステムは、コンピュータシステムのレジスタ及びメモリ内の物理的又は電子的量として与えられたデータを操作してこれらデータをコンピュータシステムのメモリ若しくはレジスタ又は他のかかる情報ストレージ、伝送又は表示装置内の物理的量として同様に表される他のデータに変換する。
【0018】
以下に説明する方法及び技術は、以下に説明する動作を行う装置によって実施できる。かかる装置は、特に、所要の目的に合わせて構成されている場合があるが、この装置は、汎用コンピュータを含み、コンピュータ内にストレージされているコンピュータプログラムにより選択的に作動され又は再構成される。かかるコンピュータプログラムは、コンピュータにより読み取り可能なストレージ媒体、例えばフロッピー(登録商標)ディスク、光ディスク、CD−ROM、磁気光ディスク、読み取り専用記憶装置(ROM)、ランダムアクセスメモリ(RAM)、EPROM、磁気若しくは光カード、又は電子指令をストレージするのに適した任意形式の媒体(これらには限定されない)にストレージできる。コンピュータにより読み取り可能なかかるストレージ媒体は各々、コンピュータシステムバスに結合できる。
【0019】
本明細書において提供されるアルゴリズム及びディスプレイは、本来的には、任意特定のコンピュータ又は他の装置には関連付けられない。種々の汎用システムを以下の教示に従って設計されたプログラムに用いることができ、或いは、必要な方法及び技術を行うより特化された装置を構成するのが都合のよいことが分かる場合がある。例えば、以下に説明する方法はどれでも、ハードワイヤード回路で実施でき、或いは汎用プロセッサをプログラムすることにより実施でき、又はハードウェアとソフトウェアの任意の組合せによって実施できる。当業者であれば理解されるように、以下に説明する方法及び技術は多種多様なコンピュータシステム構成で具体化でき、かかるコンピュータシステム構成としては、手持ち装置、マルチプロセッサシステム、マイクロプロセッサ搭載又はプログラム可能消費者エレクトロニクス、ネットワークPC、ミニコンピュータ、メインフレーム(汎用コンピュータ)等で実施できる。以下に説明する方法及び技術は又、通信ネットワークを介して互いにリンクされた遠隔処理装置により仕事を行う分散型コンピュータ処理環境で実施できる。
【0020】
以下に説明する方法及びシステムは、コンピュータソフトウェアを用いて実施できる。コンピュータソフトウェアは、種々の用語、例えば、プログラム、手順又はアプリケーションを用いて言及される場合がある。公認の企画に一致したプログラミング言語で書かれている場合、これら方法及びシステムを実施するよう設計された指令のシーケンスは、種々のハードウェアプラットホーム上で実施できると共に種々のオペレーティングシステムへのインターフェイスが可能であるようにコンパイルできる。また、これら方法及びシステムは、任意特定のプログラミング言語に関して説明することはない。種々のプログラミング言語を用いて本明細書において説明する本発明の教示を実施できることは理解されよう。さらに、当該技術分野においては、アクションを行い又は結果をもたらすものとしてソフトウェアを一形態又は別の形態で述べることは、通例である。かかる表現は、コンピュータによるソフトウェアの実行により、コンピュータ内の1つ又は2つ以上のプロセッサがアクションを行い又は結果をもたらすようにすることを述べる単なる速記法的な仕方である。
【0021】
図1は、運動中の標的の無基準手段型動的追跡を説明する概略流れ図100である。標的は、解剖学的領域内に位置している。標的は、腫瘍又は病変部、例えば或いは関心のある器官であるのがよい。解剖学的領域としては、代表的には、標的に加えて1つ又は2つ以上の基準構造が挙げられる。動的追跡方法及びシステムの一実施形態では、基準構造は、骨格構造(即ち、骨)であるのがよい。別の実施形態では、基準構造は、生まれつき備わっている他の解剖学的構造であってよく、かかる解剖学的構造としては、軟骨又は他の(代表的には、密度がかなり高い)器官が挙げられるが、これらには限定されない。さらに別の実施形態では、基準構造は、人工構造、例えば基準手段又は手術用ハードウェアであってよい。
【0022】
上述したように、本明細書全体を通じて、「サイクルPの周期運動」という用語は、周期運動のサイクルP並びに運動の振幅及び波形が時間が経つにつれ変化する周期運動を含むものと理解されるべきである。換言すると、「周期運動」又は「サイクルPの周期運動」という用語は、人体の解剖学的構造中の運動の性質が変化する状態を意味するものとしても理解されるべきである。
【0023】
上述したように、解剖学的領域は、その運動中変形(これは、非剛体変形である場合がある)を生じる場合がある。図1に示す実施形態では解剖学的領域は非剛体変形を受けながら周期的に運動するものとして説明されるが、本明細書において説明する方法及びシステムを用いて解剖学的領域の任意他の運動(例えば、無周期運動)及び任意種類の変形を追跡することができる。
【0024】
概要説明にあたり、図1に示す実施形態では、ステップ105〜160において、周期的に運動していると共に非剛体的に変形する解剖学的領域内の標的の存在場所を突き止める。非剛体的に運動すると共に変形している解剖学的領域中への放射線の実質的に連続した投与に起因して得られる放射線量分布をコンピュータ処理する。最後に、ステップ170において、コンピュータ処理された放射線量分布に従って放射線を標的にリアルタイムで投与する。
【0025】
第1のステップとして、ステップ105において、1組のCT画像Ij(j=1,...,p)を収集し、各CT画像は、サイクルP内での一連の時点tj(j=1,...,p)のうちの一時点において撮られる。ステップ110では、例えば、解剖学的領域の皮膚に取り付けられたマーカ又はセンサの動的追跡により周期運動のサイクル(例えば、呼吸サイクル又は心拍動サイクル)を求める。
【0026】
ステップ120では、これらCT走査及びセンサから得られた運動サイクル情報から4D(3D+時間)数学的モデルを構築する。数学的モデルは、解剖学的領域がその周期運動(例えば、呼吸)を行っているときにこの解剖学的領域の非剛体運動及び変形を運動サイクルP中の時点の関数として説明する。4Dモデルは、標的の存在場所を周期的に運動している解剖学的領域内の基準構造の存在場所にサイクルP内における時間的相対位置の関数として関連付ける。より一般的に言えば、この4Dモデルは、解剖学的構造の1つ又は複数の部分と放射線外科手術のために追跡されるべき標的との間の3D+時間関係を呼吸サイクル中の時点の関数として説明することができる。
【0027】
次に、ステップ130、ステップ135及びステップ140では、x線画像化及び2Dから3Dへの画像位置合わせを利用して解剖学的構造の1つ又は複数の部分の絶対位置を突き止める。これらステップにおいて、基準構造及び(又は)標的の存在場所を、非剛体画像位置合わせアルゴリズムを用いる基準構造及び(又は)標的の無基準手段型追跡により近リアルタイムで突き止める。
【0028】
上述したように、本明細書においては、「リアルタイム」という用語は、実際の放射線治療と投与と実質的に同時のタイムスケールを意味している。ちょうど1つの例示の実施形態では、標的の術中リアルタイム追跡を、約30Hzレートで追跡する光マーカを用いると共に約80Hzレートで予測を更新するモデルを用いて実施することができる。これは、例示であるに過ぎず、リアルタイム追跡は、一般に約1Hzよりも高い広範な種々の追跡速度で行うことができる。「近リアルタイム」という用語は、「リアルタイム」という用語で説明されるタイムスケールよりも約1桁又は2桁以上遅いタイムスケールを意味する。一例を挙げると、1秒の約何分の一から約数秒の範囲にあるx線画像を収集するタイムスケールを「近リアルタイム」と呼ぶ。
【0029】
ステップ105で収集したCT画像からステップ130において解剖学的領域の1組のDRRを生じさせる。ステップ135において、解剖学的領域の実際のx線射影画像を収集する。ステップ140において、基準画像のDRRを基準構造の近リアルタイムx線画像に位置合わせする。
【0030】
ステップ150では、4D治療計画立案を行い、この場合、非剛体的に運動すると共に変形している解剖学的領域中への連続ビーム投与に起因する放射線量分布状態をコンピュータ処理する。このステップでは、基準構造の絶対存在場所の知識(ステップ140で得られた知識)を用いると共に基準構造を呼吸サイクル中の時点(センサからの情報を用いて求められる)に関連付けると共に存在場所が追跡されている標的に関連付ける4Dモデルを用いて放射線ビーム軌跡を求める。
【0031】
ステップ160において、標的の存在場所を突き止める。一実施形態では、無基準手段型の追跡により突き止められた骨格構造の絶対位置及び運動サイクルに関するセンサから得た情報と共に4D数学的モデルを用いて標的の存在場所を突き止めるのがよい。変形実施形態では、標的存在場所を2D/3D非剛体画像位置合わせ法により突き止めてもよく、その間、DRR(治療計画立案段階中に生成される)を近リアルタイムx線画像上に位置合わせする。最後に、ステップ170において、4D治療計画を立案により得られた放射線量分布に従って放射線を標的に投与する。
【0032】
図2は、患者の解剖学的構造内の運動中の標的の術前画像(例えば、3D CT走査)の収集法を概略的に示している。図示の実施形態は、3D CT走査を示しているが、任意他の形式の3D走査を実施してもよく、かかる3D走査としては、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査が挙げられるが、これらには限定されない。図示の実施形態では、患者の呼吸サイクルP内における互いに異なる時点tj(j=1,...,k,...,l,...,m,...,p)で1組のCT走査を撮る。図示の実施形態では、t1<tk<tl<tm<tpである。時点tjは、患者の呼吸サイクル中の別々の時期に相当している。サイクルPを外部センサ、例えば呼吸センサによってモニタする。例えば、表面マーカ(例えばLED)又はこれに類似した装置を皮膚に取り付けるのがよい。標的が呼吸以外の運動を行う実施形態では、種々の形式のセンサ(例えば、心拍動がモニタされる場合には心臓モニタ)を用いるのがよい。
【0033】
図示の実施形態では、CT画像を時点tk,tl,tpでそれぞれ撮る。呼吸サイクルP内における時期又は時点は、好ましくは、呼吸運動の動的範囲全体を実質的に含むよう選択される。例えば、一実施形態では、時点は、サイクルPの谷に相当する時点tl、サイクルPの山に相当する時点tp、及びサイクルPの山と谷との中間位置にある第3の時点tkを含むのがよい。他の実施形態では、CT画像を撮るために選択される時点は、上述した3つの時点tl,tp,tkよりも多くの時点を含むのがよい。
【0034】
この組をなすCT画像の検討から、運動サイクル中の一時点又は時期で収集されたCT画像を運動サイクル中の次の時点又は時期で収集された別のCT画像中にモーフィングする4D数学的モデルを構築し、解剖学的構造の連続非剛体変形に関するモデルを運動サイクルの関数として構成する。画像処理にあたり、当該技術分野においては、一画像を別の画像中にモーフィングすると共にこれを数学的モデルにより説明することは周知である。公知であって市販されている標準型ソフトウェア及び(又は)アルゴリズムを用いることができる。
【0035】
一実施形態では、図2に示す1組のCT画像から構築された4D数学的モデルを4D治療計画立案のために、即ち、治療標的の非合成運動及び変形を運動サイクル内の時間的位置の関数として計算に入れて非合成的に運動している解剖学的構造中への連続放射線ビーム投与から得られる放射線量分布をコンピュータ処理するために用いる。この実施形態では、4D治療計画立案は、2つの部分、即ち、a)解剖学的構造の非剛体変形に関する数学的モデルを上述したように運動サイクル中の時点の関数として構築する部分、及びb)この数学的モデルを用いて非剛体的に運動している解剖学的構造中への連続放射線ビーム投与に起因する放射線量分布をコンピュータ処理する部分とから成る。
【0036】
所望の放射線量分布をコンピュータ処理するために、先ず最初に、ビーム軌跡を名目上の患者座標系に関して規定する。一実施形態では、名目上患者座標系は、図2に示すと共に運動サイクルをカバーするよう収集された幾つかのCT画像のうちの1つに関して方位を定めるよう選択されるのがよい。他の実施形態では、種々の向き又は方位を選択することができる。一実施形態では、各CT画像が撮られた時点に対応した時期から各放射線ビームをターンオンし、この放射線ビームは、所望の放射線量分布を与えるよう選択された期間にわたりオンのままである。線量吸収度は、患者の解剖学的構造の非剛体変形を計算に入れて当初の時点から時間の関数として計算される。
【0037】
一実施形態では、4D数学的モデルは、1つ又は2つ以上の基準構造の3D存在場所を運動サイクル中の時点の関数として標的の3D標的場所に関連付ける。4Dモデルでは、選択された基準構造のうちの1つ又は2つ以上は、運動サイクルに関して静止しているのがよく、他方、選択された基準構造の他のものは、運動サイクルに関して非合成運動を行うのがよい。
【0038】
図3は、a)患者の運動全体を通じて実質的に静止している実質的に剛体の基準構造、及びb)患者の運動に伴ってそれ自体運動する多数の基準構造のうちの一方を用いて標的の3D運動を患者の運動サイクルの関数として追跡する方法を概略的に示している。2つの種類のモデルが可能であり、かかるモデルは、(a)実質的に静止している実質的に剛体の基準構造(かかる基準構造としては、脊椎構造が挙げられるが、これには限定されない)に関する運動サイクルの関数としての標的(腫瘍/病変部)の3D運動、又は(b)解剖学的領域の周期運動と一緒にそれ自体運動する多数の基準構造に関する運動サイクルの関数としての標的(例えば、腫瘍/病変部)の3D運動である。
【0039】
図3に示す実施形態では、標的210は、解剖学的領域200の周期運動により解剖学的領域200内で運動する。基準構造は、参照符号230,232を用いて示されている。基準構造230はそれ自体、呼吸に伴って動く、他方、基準構造232は、解剖学的領域200の呼吸又は他の周期運動に伴って運動することはない実質的に剛体の基準構造である。
【0040】
多数の骨格構造の3D存在場所及び向きにより、各骨格構造から腫瘍又は病変部に向いたベクトルを描くことができる。腫瘍/病変部の3D運動を呼吸に関してそれ自体動くことはない剛体骨格構造(例えば、参照符号210を用いて図3に示された骨格構造)に関して腫瘍/病変部の3D運動を呼吸サイクルの関数として説明するモデルを、例えば、治療のために背臥位にある患者の脊椎構造(これは、かかる非運動状態の骨格構造の実際の例である)と関連して用いることができる。呼吸に伴ってそれ自体運動する剛体骨格構造が参照される別のモデルでは、腫瘍/病変部の3D運動を1)呼吸サイクルと2)呼吸に伴ってそれ自体運動する多数の骨格構造の存在場所の複合関数として説明することができる。
【0041】
基準構造の存在場所と標的の存在場所との関係を周期運動サイクル中の時点の関数として4Dモデルによっていったん求めると、基準構造の絶対位置を近リアルタイムで突き止める。一実施形態では、これは、1)図2に示されていて、4D数学的モデルを生じさせるために用いられた3D CT画像から基準構造のDRRを生じさせ、2)基準構造の「実際の(live)」又は近リアルタイムx線画像を撮り、次に3)実際のx線画像とDRRとの間の非剛体画像位置合わせを行うことにより達成される。非剛体画像位置合わせを用いて基準構造の存在場所をいったん突き止めると、上述した4D数学的モデルを用いて標的の存在場所を容易に突き止めることができる。
【0042】
図4は、基準構造の無基準手段型追跡方法を概略的に示している。一実施形態では、無基準手段型の追跡は、標的の2D近リアルタイムx線画像を患者の運動サイクル中の特定の時点で撮られた術前3D走査から生成されたDRRに位置合わせすることにより実施される。患者の解剖学的構造中の基準構造の位置及び向き(治療用放射線の投与時点における)を、2Dから3Dへの位置合わせ法を用いてCT画像のうちの1つの中の対応の構造に関して追跡することができる。一実施形態では、以下に詳細に説明するように非剛体2D/3D画像位置合わせを実施する。
【0043】
2D/3D非剛体画像位置合わせ法における第1ステップとして、治療用放射線の投与時点における実際の画像の収集の際に用いられる射影幾何学的形状についてDRRのライブラリを生じさせる。患者の1対の実際の(又、「近リアルタイム」)x線画像を、DRRを生じさせるために用いたのと同一の射影幾何学的形状を用いて治療用放射線の投与中に収集する。DRRを生じさせるために用いられるCT画像は、運動サイクル中の時期のうちの1つ、代表的には、治療計画立案中にビームが割り当てられる時期に対応している。治療中、患者の代表的な運動範囲をカバーするためにCT画像の幾つかの並進(平行移動)及び向きについてDRRを生じさせるのがよい。
【0044】
基準構造を追跡する特徴認識アルゴリズムを用いて収集した画像をDRRに位置合わせする。画像位置合わせアルゴリズム(以下に詳細に説明する)を多数の基準構造について繰り返し実施してCT画像中の対応の構造(DRRを生じさせるもととなる構造)に対する各構造の位置及び向きを与える。一実施形態では、腫瘍若しくは病変部又は近くの解剖学的領域の画像化特性の相違を、高感度x線検出器を用いることにより一段と強調するのがよい。
【0045】
一実施形態では、腫瘍/病変部の存在場所を非剛体位置合わせ法により突き止められた基準構造の存在場所から導き出すことができる。無基準手段型のアルゴリズムを用いて追跡された多数の基準構造の存在場所及び向きは、CT画像及び4Dモデルから教示されるようにこれらの対応の幾何学的関係を用いて腫瘍/病変部の存在場所を補間するために用いられる。別の実施形態では、無基準手段型の追跡は、標的(例えば、腫瘍/病変部)それ自体について行われる。追跡対象の標的が前の組織に対してx線画像化特性が十分に異なっている場合、以下に説明する2Dから3Dへの位置合わせ技術を用いて標的それ自体を直接追跡することができる。
【0046】
解剖学的構造の非剛体変形を計算に入れると共に基準手段に代えて解剖学的基準構造を用いる非剛体2Dから3Dへの画像位置合わせ技術について以下に説明する。以下に説明する非剛体画像位置合わせアルゴリズムを骨格構造、特に人体の解剖学的構造の脊椎領域の骨格構造に関して説明するが、脊椎骨格構造以外の基準構造も又、この非剛体画像位置合わせアルゴリズムに使用できることは理解されるべきである。
【0047】
非剛体画像位置合わせ技術は又、以下の5つの共通所有者の特許出願に記載されており、かかる特許出願は、1)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−136)(発明の名称:Fiducial-less Tracking With Non-Rigid Image
Registration)、2)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−137)(発明の名称:Motion Field Generation For Non-right Image Registration)、3)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−146)(発明の名称:ROI Selection in Image Registration)、4)米国特許出願第10/881,208号名称(代理人事件番号:ACCL−147)(発明の名称:Image Enhancement Method and System For Fiducial-less Tracking of Treatment Targets)、5)米国特許出願第10/880,486号明細書(代理人事件番号:ACCL−150)(発明の名称:DRR Generation Using A Non-Linear Attenuation Model)である。共通所有者の5つの特許出願全てを参照により引用し、これらの記載内容を本明細書の一部とする。
【0048】
図5は、術前CT走査データから再構築された解剖学的領域の2D DRRと解剖学的領域内の標的の術中近リアルタイムx線射影画像との間との間の2D/3D位置合わせのために用いることができる非剛体画像位置合わせアルゴリズムの流れ図400である。特に、DRRは、周期サイクルP内における特定の時点tjで撮られたCT画像Ijを表すCT走査データから再構築される。
【0049】
第1のステップとして、ステップ402においてCT画像Ijを表す術前3D走査データから2D DRRを生じさせるのがよい。一実施形態では、非剛体画像位置合わせが行われる画像(即ち、DRR及びx線画像)は、各々アレイ状に並べられた画素を有することを特徴とする離散化画像であり、各画素は、画素に対応した単位表面領域における画像の強度を表す関連の画素値を有する。
【0050】
一実施形態では、改良型DRR生成プロセスをステップ402において実施して骨格基準構造を引き出すことができ、かかる骨格基準構造は、通常は画像中に容易には見えず、それどころか、隠されている場合がある。ステップ402において、骨格構造を強調し、かくしてDRRの品質を向上させる非直線減衰モデルを利用してCT走査データを修正する。流れ図400のステップ403において、DRRについて画像強調技術も又実施するのがよい。このステップでは、ステップ402において得られたDRR中の骨格構造を引き出すためにシルクハット形フィルタを用いる。
【0051】
例示の実施形態では、効率を向上させるために強調されたDRR内の選択された関心のある領域(ROI)に関して画像位置合わせを実施する。したがって、ROIは、DRRの強調後、ステップ404においてDRR中に規定される。ステップ404において実施されるROI選択プロセスは、画像エントロピーを利用し、このROI選択プロセスは、ユーザとの対話を必要としないよう完全自動化されている。次に、ステップ410において術中2Dx線射影画像をステップ410において近リアルタイムで生成する。ステップ403との類推によりシルクハット形フィルタを用いてステップ415において画像強調をx線画像について実施する。
【0052】
次に、ROI内において強調されたx線画像と強調されたDRRとの間の非剛体画像位置合わせを実施する。特に、類似性測度(similarity measure)を用いてx線画像とDRR画像の画素強度を比較する。その目的は、患者の位置及び(又は)向き及び(又は)生理学的変形の変化を突き止めることにある。ステップ420〜450において、真の患者の運動及び身体の変形を説明する非剛体変形を特定する。非剛体変形を特定するため、多くの局所運動場、即ち複数の局所的に推定された運動ベクトルで構成された完全運動場を構成する。ROI内の関心のある所与の箇所での局所運動を推定するため、パターン強度を利用した類似性測度を用いて画素強度を比較する。
【0053】
多くの局所運動で構成された完全運動場は、任意所望の非剛体変形を説明することができる。さらに、このように導き出された完全運動場は、物体の互いに異なる画像収集相互間の物体の非剛体運動(並進運動及び(又は)回転運動)を非剛体変形に加えて計算に入れることができる。ROI内の関心のある任意の箇所の局所運動ベクトルを効率的にコンピュータ処理するため、階層的メッシュ運動推定及びマルチレベルブロックマッチング(強度に基づく類似性測度と関連して行われる)を実施する。これら方法は、画像位置合わせアルゴリズム400の迅速なコンピュータ処理を可能にする。平滑度制約が、ミスマッチングの生じたメッシュノードのところに運動場を再構成するよう課される。次に、非剛体画像位置合わせに関する非剛体変換パラメータを完全運動場からコンピュータ処理する。
【0054】
図5に示す実施形態では、完全運動場により説明される非剛体変形は、患者の体内の治療標的領域の3D CT走査データの収集と標的領域のx線射影画像の収集との間で生じる。ステップ420では、先ず最初に画像全体の大域的並進を推定する。推定した大域的並進を別の全ての局所運動推定のための初期推定として用いる。次のステップ430では、局所運動をマルチレベルで推定するよう設計された階層的メッシュ構造を用いてメッシュノーダル運動推定を実施する。次のステップ440では、不整合が生じているメッシュノードについて運動場再構成を行う。運動場の再構成を行うのに、事柄の首尾一貫性のために局所運動が連続的であるという仮定に基づいた平滑度制約を課す。ステップ450では、関心のある任意所望の箇所における局所運動ベクトルを、この関心のある箇所の周りのメッシュノードについて推定されたノーダル運動から補間法により導き出す。次に、関心のある複数の所望の箇所について導き出された局所運動ベクトルを用いて完全運動場を構成する。
【0055】
図5のステップ455及びステップ460として示された最後の方のステップでは、非剛体変換パラメータを完全運動場から導き出す。ステップ455において、標的変位を完全運動場から導き出す。ステップ460では、平均剛体変換を完全運動場から導き出す。 DRR画像の品質は、適正な減衰モデル化並びにCTの数の補間のための適正な補間方式に依存している。一実施形態では、ステップ402(図2に示す流れ図に示されている)では、無基準手段型追跡のために改良型x線減衰モデルを作成し、したがって、DRRがリアルx線射影画像のようになる。直線減衰モデルは、もはや取られず、CT数は、骨と組織の減衰比の差を上述したように補償するために修正される。患者の臨床上のデータにより行われる多くの実験に基づき、以下の経験的な方程式を立てて元のCT数を修正した。
【数1】
上式において、C(x,y,z)は、箇所(x,y,z)のところに位置する3D CTボクセルの修正されたCT数を表し、a及びbは、重み係数を表し、C0(x,y,z)は、場所(ロケーション)(x,y,z)を有する3D CTボクセルの非修正CT数(直線減衰モデルに基づく)を表している。
【0056】
DRRの品質を向上させるよう一実施形態で用いられる補間方式は、双線形補間である。この実施形態では、双線形補間をステップ402で実施して各射影放射線の当たったCTボクセルに沿ってCT数を積算する。一実施形態では、関心のある各ボクセルについて、双線形補間を行い、次に3つのボクセルスライスについて1−D多項式補間を行う。3つのボクセルスライスは、関心のあるボクセルを含むボクセルスライスに加えてその各隣りのボクセルスライスを含む。
【0057】
幾つかの実施形態では、無基準手段型追跡は、通常は容易には見えず、或いは、それどころかDRR及びx線射影画像中に隠されている場合がある骨格基準構造(例えば、椎骨構造)に依存している。かかる骨格構造を位置合わせしなければならないので、DRRとx線画像の両方は、椎骨構造の細部を引き出すと共にこれらの視認性を向上させるよう強調されなければならない。したがって、一実施形態では、画像強調がDRRとx線射影画像の両方について行われる。大抵の胸部及び腰部の場合、骨格構造は、容易には見えず、又はそれどころかDRR及びx線画像中に隠されている。したがって、これらの場合、位置合わせを完全に可能にするためには、DRRとx線画像の強調が必要である。頸部の場合、脊柱の骨格構造は、DRRとx線画像の両方において良好に見えるが、かかる構造の細部は依然として明確ではない。したがって、頸部の場合、DRR及びx線画像は、位置合わせを向上させるよう強調されるべきである。
【0058】
図5に示す実施形態では、シルクハット形フィルタが、x線画像を強調する(図5のステップ(415)と共にDRR画像を強調する(図5のステップ403)よう設計されて用いられる。特に、シルクハット形フィルタ演算子をx線射影画像及びDRR画像の画素に適応することにより画像中の骨格構造を強調し又は引き出す。公知のように、シルクハット形フィルタは、2つの互いに異なるサイズの近傍中の最も明るい画素を見つけ、極めて高い値を維持する非曲線演算子である。一実施形態では、シルクハット形フィルタは、次のように作用する。即ち、小さな近傍領域中の輝度が最も高い値が大きな近傍中の値よりもユーザにより入力されたしきい値により定められる量だけ大きい場合、画素は、そのままであり、そうでなければ、画素は、消去される。シルクハット形フィルタを画像に適応した結果として、関心のある特徴の存在場所を突き止めることが可能である。
【0059】
一実施形態では、シルクハット形フィルタは、或る特定の構造要素による画像の開始及び終了の重み付け組合せを用いることにより設計される。シルクハット形フィルタ演算子は、次のように数学的に定義される。
【数2】
上式において、feは、元々の画像中の各画素にシルクハット形フィルタオペレータを適用した結果として得られる強調される画像を表し、fは、元の画像を表し、w及びbは、重み計数を表し、ψBfは、元の画像fの開始に関する構造要素を表し、ψBfは、元の画像fの終了に関する構造要素を表している。
【0060】
上記方程式(2)では、WHT(f)=f−ΥB(f)は、ホワイトシルクハット形フィルタと呼ばれ、BTH(f)=ψB(f)−fは、ブラックシルクハット形フィルタと呼ばれている。構造要素ΥB(f)及びψB(f)は、基本的な形態素演算を実施するために用いられるマスクである。構造要素のサイズは、頸部用途、胸部用途及び腰部用途で僅かに異なる。経験的な値を実験的に求める。重み係数w,bをWTH(f)及びBTH(f)の振幅によりそれぞれ適応的に求める。経験的に、重み係数w,bの値は、存在する組織が少ない頸部の場合、それぞれ約1(w=1,b=1)であることが判明した。存在する組織が多い腰部の場合、w,bの値は、それぞれ約2よりも大きい(w>2,b>2)であることが判明した。腰部の場合、重み付けプロセスは、頸部の場合と比べて、骨格構造をより大きな程度引き出す。
【0061】
一実施形態では、DRR中に規定された関心のある或る特定の領域(ROI)についてのみ画像位置合わせを行う。ROIは、治療標的(例えば、腫瘍又は病変部を含む)。一実施形態では、図5のステップ404において、画像エントロピーを具体的に特定する。このように、ROIは、最適な位置合わせを得るため、ユーザ対話を最小に抑えるため又はそれどころかユーザ対話を無くすために自動的に選択できる。画像位置合わせが画像内容又は画像情報に依存しているので、この実施形態では、ROIは、できるだけ多くの情報を含むよう最適化される。
【0062】
従来の通信手段から知られているシャノンのエントロピーは、信号及び画像処理の際の情報の尺度として一般に用いられている。シャノンエントロピーは、H=−Σinpilogpiであり、上式において、Hは、1組のn個の記号により提供される平均的な情報を表し、かかる記号の確率には、p1,p2,...,pnが与えられる。各画像(図5においてステップ403又はステップ415で強調されている)の画素に適用された場合、各画像に関するシャノンエントロピーは、H=−Σlp(l)logp(l)によって定義され、この式において、lは、画像の強度レベルであり、p(l)は、ROI中で生じる画像強度値lの確率である。シャノンによる元の公式化では、確率p1,p2,...pnを等しくさせようとするデータ中の変化は、シャノンにより考察されているようにエントロピーを増大させる。所与の画像に関し、シャノンエントロピーは、確率p1,p2,...,pnがヒストグラムエントリである画像強度ヒストグラムから従来通り計算される。
【0063】
一実施形態では、シャノンエントロピーHは、骨格構造が明るい領域中で生じるという事実に基づいて修正される。この実施形態では、修正されたシャノンエントロピーが、各画像について用いられ、これは、次のように定められる。
【数3】
上式において、lは、この場合も又、画像強度レベルでありp(l)は、ROI中で生じる画像強度値lの確率である。ステップ404(図5に示す)では、先ず最初に、修正したシャノンエントロピーを強調されたDRR画像について求める。修正シャノンエントロピーHをいったん計算すると、次に、ROIは、エントロピーHが最大化されるDRR内の領域を突き止めることにより自動的に選択される。画像位置合わせプロセスにおける次のステップ(図5のステップ420〜450)は、ROI中でのみ行われる。
【0064】
画像位置合わせプロセスをROI内に制限することには、幾つかの利点がある。一利点は、かかる制限は、位置合わせをROIについてのみ行う必要があるだけなので位置合わせプロセスをスピードアップすることができるということにある。例えば、類似性測度をROIについてコンピュータ処理すれば済み、ブロックマッチングは、ROI内で実施するだけで済む。さらに、位置合わせプロセスは、ROI内の領域に制限されると、より正確である。位置合わせが行われる領域が制限されれば制限されるほど、ROI内の構造が術前CT走査の時点と医学的治療の時点との間で互いに対して動く恐れがそれだけ一層低くなる。
【0065】
改良されて強調されたDRR(図5のステップ402及びステップ403で生成されている)及び骨格基準構造が無基準手段型の追跡を可能にするよう引き出された強調されたx線射影画像(図5のステップ415)に基づき、解剖学的領域の非剛体変形をステップ420〜ステップ450で突き止める。本明細書においては、「剛体」仮説、即ち、画像位置合わせ用途において行われる場合が多く、画像収集相互間において関心のある解剖学的構造及び病理学的構造が変形又は歪みを生じていないと仮定する仮説は、採用される必要はない。剛体仮説が不要である場合、剛体制約を保持し、即ち、本体が剛体であり、変換中、局所変化を生じないことが必要であるようにする必要性はもはや存在しない。臨床的患者データに関する観察及び分析が豊富であるということに基づき、本明細書においては、非剛体変形が、剛体変換に代えて、実際の患者の運動及び身体の変形に関する改善された説明を得るものと見なされる。非剛体変形場をコンピュータ処理することにより、患者の位置/向きを初期位置合わせ中並びに治療全体を通じてより高い信頼度でモニタして修正することができる。
【0066】
非剛体画像位置合わせにより、互いに異なる画像収集相互間に存在する固有の局所解剖学的ばらつきを、かかるばらつきの克服を可能にすることはない剛体画像位置合わせとは対照的に、計算に入れることができる。非剛体位置合わせは、画像中の全ての画素についての並進又はマッピングを提供する変形場を定める。一実施形態では、多くの局所運動ベクトル又は場で構成された完全運動場をコンピュータ処理して非剛体変形場を得る。
【0067】
局所運動場を推定するため、一実施形態では、マルチレベルブロックマッチング法がパターン強度に基づく類似性測度と関連して用いられる。この方式により、局所運動をROI中の大抵の部分で迅速且つ正確に推定することができる。コンピュータ処理による効率を見込んだマルチレベルブロックマッチングは、共通所有者の米国特許出願第10/652,786号明細書(以下、「第´786号出願明細書」という)に剛体位置合わせアルゴリズムと一緒に記載されている。なお、この米国特許出願を参照により引用し、その記載内容全体を本明細書の一部とする。サイバーナイフ放射線外科手術システムに用いられる剛体変換を利用した位置合わせアルゴリズム、即ち、アキュレイ・インコーポレイテッド(Accuray, Inc.)により開発された「FAST 6Dアルゴリズム」と関連して用いられるパターン強度に基づく類似性測度が、共通所有者の米国特許出願第10/652,786号明細書(「第´786号出願明細書」)、同第10/652,717号明細書(「第´717号出願明細書」)、及び同第10/652,785号明細書(「第´785号出願明細書」)に十分に説明されており、これら米国特許出願を参照により引用し、これらの記載内容全体を本明細書の一部とする。本明細書においては、パターン強度に基づく類似性測度及びマルチレベルブロックマッチング法を非剛体(剛体ではない)変換を利用した位置合わせアルゴリズムと関連して用いる。元々剛体画像位置合わせアルゴリズム用に開発されたパターン強度に基づく類似性測度は、非剛体方式においても2D/3D画像位置合わせ問題を解決する強力且つ効率的な技術を提供する。
【0068】
一実施形態では、ROI中の各所望の箇所のところの変位を局所的に推定するため、ブロックマッチングを実施し、即ち、関心のある箇所に中心が合わされた小さなブロックを用いる。公知のように、ブロックマッチングを利用して第1の画像第2の画像上に位置合わせする際、第1の画像を種々のブロック、例えばサイズの等しい矩形ボックスの状態に分割する。メッシュノードである場合があり又はメッシュノードにより包囲された非ノード画素である場合のある関心のある各箇所は、ブロックのうちの1つの中心と見なされる。次に、これらブロックを並進させて局所類似性基準を最大にし、この基準は、一実施形態では、上述したパターン強度に基づく類似性測度である。
【0069】
ブロックマッチング法では、一般に、ブロック中の各画素が同一の運動を行い、ブロックマッチングアルゴリズムは、代表的には、各ブロックについて運動ベクトルを推定するために用いられると仮定される。一実施形態で用いられるブロックマッチングアルゴリズムでは、それぞれのブロック相互間のパターン強度に基づく類似性の測度を最大にするような仕方で第2の画像中のマッチングブロックについて探索を行う。探索は、類似性測度関数中の最大値の場所についてであり、最大値は、第2の画像中のマッチングブロックの存在を表している。探索を探索窓内で実施するのがよく、この探索窓は、関心のある箇所の周りに定められ、ブロックを含んでいる。
【0070】
どのブロックマッチングアルゴリズムにおいても、探索ストラテジを最適化し、適当なブロックサイズを選択することが重要である。小さなブロックに関し、並進剛体モデルが想定される。剛体回転又は或る他の複雑な変形が存在する場合であっても、ブロックの中心点に関する並進を推定する剛体並進モデルは有効である。または他の変形が、並進に加えて存在している場合、精度は、ブロックサイズの減少につれて増大し、ブロックサイズの増加につれて減少する。しかしながら、小さなブロックサイズを用いた状態では、ミスマッチングの恐れが増大する。一実施形態では、ブロックサイズ選択ストラテジが採用され、このブロックサイズ選択ストラテジでは、変位が大きい場合には大きなブロックが必要とされ、変位が小さい場合には小さなブロックが必要とされるということが想定される。
【0071】
図6は、ブロックマッチングを用いた患者の体内の標的中の関心のある箇所についての局所運動推定法を概略的に示している。図6に示す実施形態では、標的は、脊柱の頸部領域中に配置されている。ただし、この場合も又、非剛体2D/3D画像位置合わせ技術を構造的脊柱追跡以外の用途に使用できることが強調される。左及び右側の絵は、それぞれ、DRR及びx線画像である。小さなブロック203Aが、DRR中の関心のある箇所205の周りに定められている。また、ブロック203を含む探索窓207が、DRR中に定められている。x線画像中のマッチングブロックが、参照符号203Bで図6に示されている。図6に示す実施形態では、探索窓207の寸法は、48mm×48mmであり、ブロックサイズは、15mm×15mmである。単に目視検査により、関心のある箇所205がx線画像中に良好に位置していることが分かる。
【0072】
図7は、マルチレベルブロックマッチングを実施する際、多数の候補者を用いる多重解像度画像表現法を概略的に示している。マルチレベルマッチングは、低いレベルで行われた変位推定値を次の探索段階のための初期結果として用いる迅速な探索法である。マルチレベルブロックマッチングにおける基本的な概念は、最も低い解像度レベルから始まって最も高い解像度レベルまで進んで複数の解像度レベルの各々で次々に画像をマッチさせることにある。最も高い解像度レベルを有する実物大の画像が、レベル1として図7の底部に示されている。情報の画像(レベル2及びレベル3)は、次々に低い空間解像度を有し、最も低い解像度を有する画像は、レベル3として示されている。低解像度の画像は、実物大の画像の低域フィルタリング及び二段抽出法によって得られる。
【0073】
図7では、図面に示されているように、画像ブロックのフルサイズは、レベル1ではW×Hであり、ブロックサイズは、レベル2及びレベル3ではそれぞれ(W/2)×(H/2)及び(W/4)×(H/4)である。最も低い解像度のレベル(レベル3)では、大きな探索レンジを用いて大きな変位の推定を可能にする。解像度レベルの残部では、非常に小さな探索レンジ(−2,+2)を用いる。
【0074】
低い解像度レベルでの結果は、変位の大まかな推定値を求めるのに役立つ。次に、低レベルでの出力を次の高い解像度のレベルに移す。ブロックに関する推定運動ベクトル(大抵の場合、並進ベクトル)は、解像度の高い画像を用いて次々に改善される。最後のマッチング結果では、推定並進の精度は、解像度の最も高い画像(図7にレベル1として示されている)の空間解像度で決まる。
【0075】
マルチレベルマッチングには或る危険性が存在する。低いレベルでの推定値は、局所最大値に収まり、求められている大域的最大値からは遙かに隔たっていることが可能である。この場合、次の解像度の高いレベルでの別のマッチングは、その大域的最大値に収斂することはない。この危険性を解決するため、一実施形態では、多数の候補者が推定のために用いられる。最適なマッチング結果を示した多くの候補者を解像度の低いレベルから解像度の高いレベルに移す。用いられる候補者が多ければ多いほど、推定値の信頼性がそれだけ一層高くなる。一実施形態では、最善の候補者は、類似性測度関数値によってランク付けされる。
【0076】
一実施形態では、パターン強度に基づく類似性測度が、マルチレベルブロックマッチングと関連して用いられる。上述したように、この類似性測度は、共通所有者の第´786号出願明細書、第´787号出願明細書、及び第´785号出願明細書に記載された「FAST 6Dアルゴリズム」の成功に寄与する重要な要素である。一実施形態では、類似性測度は、「実際の」(又は近リアルタイム)x線射影画像とDRR画像との間の差画像を形成し、差画像の各画素にパターン強度関数を適用することにより決定される。具体的に説明すると、差画像Idif(i,j)は、ROI中の術中x線射影画像の各画素値から術中DRR画像の対応の画素値を差し引くことにより形成される。
【0077】
【数4】
方程式(4)において、I(i,j)は、それぞれの画像に関し各画素アレイのi番目の行及びj番目の列のところに位置する画素の画像強度値を表している。具体的に説明すると、Idif(i,j)は、第2の画像の対応の画素値を第1の画像の各画素値から差し引くことにより形成された差画像に関する画素値のアレイを表している。Ilive(i,j)は、物体の第1の画像の(i,j)番目の画素値を表している。IDRR(i,j)は、物体の第2の画像の(i,j)番目の画素値を表している。類似性測度は、この差画像について働き、近傍R内の画素全体にわたる差画像の勾配の漸近関数の和として以下のように表現される。
【0078】
【数5】
上記方程式(5)では、定数Σは、パターン強度関数のための重み係数である。x線画像のばらつきに対する解決策の感度は、この定数の注意深い選択により最小限に抑えることができる。重み係数が大きければ大きいほど、結果の安定性はそれだけ一層高くなる。しかしながら、Σの選択にあたっては、安定性と精度との間には必然的にトレードオフの関係がある。Σの値が大きすぎる場合、類似性測度には画像中の幾つかの小さな細部を反映させることができない。実験に基づき、Σに関する経験的な値は、一実施形態では、約4〜約16である。
【0079】
図8は、パターン強度に基づく類似性測度を計算する近傍Rを概略的に示している。図8から分かるように、図示の実施形態における近傍Rは、差画像の勾配を少なくとも4つの方向(水平方向、垂直方向、45°直交方向、−45°の直交方向)で考えることができるよう定められている。近傍Rをこのように定めた場合、類似性測度に関する方程式(5)は、次のようになる。
【数6】
【0080】
パターン強度に関する方程式(5)及び方程式(6)には、幾つかの利点がある。第1に、差画像は、大部分軟組織から成る低周波数部分を濾過して除去し、主として骨格構造から成る高周波部分を保つ。この特徴により、アルゴリズムは、実際の画像とDRR画像との間の幾分かの輝度強度の差に対して強くなる。第2に、漸近関数により、強度値がその隣りの画素から僅かにずれる画素による測定への影響の度合が少ない。これら形式の画素は、ランダムなノイズを含むものと考えられる。第3に、変数が増大すると漸近関数が素早くゼロに近づくので、大きな強度差、例えば画像アーチファクトは、これらの大きさにも関わらず、類似性測度に対して同一の効果を及ぼす。この特徴により、パターン強度は、画像アーチファクトに対する感度が低い。
【0081】
階層的メッシュ運動推定と一緒にブロックマッチングを用いた局所運動場の推定並びに複数の局所的に推定した運動場からの完全運動場の再構成は、図5に示す流れ図のステップ420〜450で実施される。完全運動場の迅速な生成は、階層的メッシュ追跡を用い、SIMD(単一命令多重データ)技術を用いて画像コンピュータ処理を並行実施することにより達成される。
【0082】
一実施形態では、画像全体の大域的並進(画像の画像中心の並進として測定される)を先ず最初に推定し、次に全ての別の局所運動推定に関する初期推定値として用いる。換言すると、画像全体に関する中心変位について大まかな推定を行い、これを全ての局所変位に関する開始推定値として用いる。図5に戻ってこれを参照すると、術前走査と術中治療との間で標的に関する完全運動場を作る際の第1のステップ(図5において符号420で指示されている)は、画像全体に関する大域的並進を推定し、又は、均等例として、画像の中心変位を推定するステップである。
【0083】
図9は、DRRの画像中心と対応のx線画像の画像中心との間の大域的運動(この場合、並進だけ)の推定法を示している。図示の実施例では、画像中心は、ブロック中心として用いられている。大域的並進推定ステップは、このステップ中の失敗がどのようなものであれ、局所運動推定プロセスの残部に影響を及ぼすので非常に重要である。ミスマッチングの発生の恐れを阻止するため、図示の実施形態では、非常に大きな画像ブロックが用いられている。最大追跡範囲をブロックサイズと画像サイズ全体との間の差として計算するのがよい。例えば、マッチングサイズが80×80mmである場合、最大追跡並進量は、60mmである。図9に示す実施形態では、サイズが160×160画素(64mm×64mm)を有するブロックが用いられている。図示の実施形態の探索窓は、画像全体である。図示の実施形態の最大追跡範囲は、(−50mm,+50mm)である。
【0084】
大域的運動推定後、次のステップ430(図5参照)は、メッシュ運動推定である。このステップでは、局所運動を多数のレベルで推定するために階層的2Dメッシュ構造を設計する。公知のように、2Dメッシュ(又は2Dメッシュグリッド)は、多角形パッチ又は要素への2D領域のモザイク化を意味しており、これらパッチ又は要素の頂点は、メッシュノードと呼ばれている。一般に並進運動だけを想定しているブロックマッチングアルゴリズムとは異なり、2Dメッシュモデルは、物体の並進に加えて、画像化された物体の回転、スケール変更及び変形をモデル化する空間的変換を可能にする。したがって、ブロックマッチングアルゴリズムと比較して、メッシュを利用した方法は、運動場のより正確な表示を生じさせることができ、例えば、連続して変化する運動場を生じさせることができる。
【0085】
図10は、標的が脊柱の頸部領域内に位置している実施形態では、標的領域のDRRについて作られたメッシュグリッド300及び標的領域のx線画像について作られた対応のメッシュグリッド302を概略的に示している。2Dメッシュでは、各メッシュ要素又はパッチ内の運動補償は、画像相互間の空間的変換を求めることにより達成でき、この場合、変換パラメータは、ノーダル運動ベクトルから、即ち、メッシュの頂点のところに位置するメッシュノードについて推定された運動ベクトルからコンピュータ処理される。換言すると、メッシュを利用した運動推定は、第1の画像収集における1組のメッシュ要素を第2の画像収集における別の組のメッシュ要素上に最適マッピングする空間変換を見出すことからなる。
【0086】
特に、メッシュ運動推定は、他方の画像中の対応のメッシュ要素の頂点を見出し、即ち、他方の画像の対応のメッシュノードを見出して誤差を運動場全体に関して最小限に抑えることから成る。代表的には多数のメッシュノードが一画像中に選択され、他方の画像中の対応のメッシュノードが推定される。メッシュ要素内に位置する(メッシュ要素の頂点のところに位置するのとは対照的に)画素の場合、異なる画像収集相互間のマッピングは、補間によって行われる。かかる画素に関する局所運動ベクトルを推定するのに、画素を包囲するメッシュノードについて推定されたノーダル運動ベクトルからの補間を行う。
【0087】
一実施形態では、階層的メッシュ運動推定を実施するのがよい。階層的メッシュ運動推定という表現は、ノーダル運動が複数のメッシュ解像度レベルの各々についてメッシュ構造を特定するメッシュノードについて推定することを意味する。粗いメッシュで行われた運動推定は、メッシュの次の(より細かい)解像度レベルについての初期化をもたらす。各メッシュモードの運動を推定するため、マルチレベルブロックマッチングを行うのがよい。
【0088】
図11は、メッシュ運動推定中におけるメッシュ階層を示している。図11から分かるように、メッシュ階層は、比較的粗いメッシュ320から始まり、符号322,324として示された細かいメッシュに進む。大域的並進(初期推定値として図5のステップ420で推定されている)を用い、最も粗いメッシュの頂点のところに位置するメッシュノードについてのノーダル運動を先ず最初に計算する。次に、これら推定値を次の細かいメッシュ上に渡す。各レベルでは、より小さな探索範囲を用いてノーダル運動を更新する。最後に、メッシュ解像度レベルのうちの最後の1つ(最も細かいメッシュ解像度レベルであることを特徴とする)のところのメッシュノードに関する運動ベクトルを改善する。ノード全てに関し、多数の候補者によるマルチレベルブロックマッチングを方程式(5)及び方程式(6)で与えられたパターン強度に基づく類似性測度と一緒に用いる。
【0089】
図12は、ノード推定を粗いメッシュの解像度レベルから細かいメッシュの解像度レベルに引き渡す方式を概略的に示している。第1のレベル後の各メッシュの解像度レベルでは、メッシュノードは、1)先のメッシュ解像度レベルのところで生じたメッシュノードと2)現在のメッシュ解像度レベルのところに新たに付け加えられたメッシュノードの両方を含む。図示の実施形態では、ノーダル運動ベクトル及び現在のメッシュのところの新たに付け加えられたノードに関する初期推定は、先のメッシュ解像度レベルのところの既存のノーダル運動ベクトルの直線補間によって得られる。このプロセス中、信頼性の無いメッシュノードを検出する必要があり、信頼性のあるノードだけを次のメッシュレベルに渡すようにする。
【0090】
図12は、図12に記載したメッシュノードを「ノード5」として用いてかかる検出をどのようにすれば実施できるかを示している。図示の実施形態では、ノード5の運動ベクトル(この場合、並進ベクトル)とその9個の周りのノード(図12のノード1〜4,6〜9)からコンピュータ処理された中央運動(並進)との間の差を取る。図12から分かるように、ノード2の並進は、ノード1及びノード3の並進の平均であり、ノード4の並進は、ノード1及びノード7の並進の平均であり、ノード6の並進は、ノード3及びノード9の並進の平均であり、ノード8の並進は、ノード7及びノード9の並進の平均である。ノード5の並進は、ノード1、ノード3、ノード7及びノード9の並進の平均である。ノード5の並進とその9個の隣のノードからコンピュータ処理された中央並進との間の差があらかじめ定められたしきい値よりも小さい場合、ノード5は、信頼性のあるノードと見なされる。さもなければ、このノードは、信頼性の無いノードとして見なされ、その並進は、中央値で置き換えられて次のメッシュに渡される。
【0091】
大抵のメッシュノードに関し、運動の推定は、信頼性があり且つ正確である。ミスマッチングが生じる場合があり、推定が信頼できない場合がある数個のノードの場合、並進は、周りのノードの並進により再構成される必要がある。したがって、図15の位置合わせアルゴリズム流れ図における次のステップは、運動場再構成のステップ440であり、このステップ中、運動場は、ミスマッチングが生じるノードに関し、周りのノードから再構成される。不正確なノーダル運動ベクトルを検出するのに3×3中央値フィルタリングを用いるのがよい。
【0092】
局所運動推定は、局所画像内容に依存している。幾つかのスムーズな局所領域では、ミスマッチングが生じる場合がある。メッシュ運動推定中、大抵のノードにおける推定は、相当に正確である。ミスマッチングが生じる僅かなノードに関し、運動は、これらの周りのノードから再構成されるべきである。アプリオリにより知られていることは、骨及び組織の物質一致性であり、したがって、局所運動の平滑度である。換言すると、推定した局所運動ベクトルは、物質一致性により平滑且つ連続であると考えられる。この物理的な観点に基づく平滑度拘束を課すことにより、費用関数を作って運動場を再構成する。
【0093】
一実施形態では、費用関数は、数学的に次のように表される。
【数7】
上記方程式(7)において、E(d)は、費用関数を表し、dは、座標(x,y)のところのノーダル運動ベクトルに関する所望の局所推定値、uは、座標(x,y)のところの局所的に推定されたノーダル運動ベクトルを表し、βは、0から1の範囲にある信頼性定数を表し、β=0は、信頼性の無い推定を示し、β=1は、信頼性のある推定を示している。
【0094】
メッシュグリッドに対する導関数の有限差を行うことにより、方程式7における費用関数についての離散化形態は、次のように表される。
【数8】
上式において、ui,jは、局所的に推定された並進を表し、di,jは、所望の局所運動を表し、βi,j=1は、推定が信頼性がある場合を示し、βi,j=0は、推定に信頼性が無い場合を意味している。
【0095】
方程式(8)の右側の第1項は、再構成における観察されたデータに対する信頼度を反映している。第2項は、平滑度拘束を2つの空間方向で運動場に課す。
【0096】
方程式(8)により与えられる費用関数の最小化の結果として、次の同時線形方程式系が得られる。
【数9】
一実施形態では、早くて収束性の逐次過緩和法(SOR)の対話型アルゴリズムを用いて次のように方程式を解く。
【数10】
【0097】
ノーダル運動ベクトルを全てメッシュノードの全てのところでいったん評価すると、ROI内の任意の箇所(又は画素)に関する並進を補間法によりコンピュータ処理するのがよい。図13は、関心のある箇所についての運動ベクトルを補間法により周りの濃度から求める方法を概略的に示している。図示の実施形態では、9つの最も近いノードを用いて2次補間を行い、9つの形状関数を用いる。
【0098】
9つのノードについて運動ベクトル(dx(i),dy(i))であると仮定すると、関心のある箇所における運動ベクトル(dx,dy)は、以下の方程式を用いることによりコンピュータ処理される。
【数11】
上式において、N(i)は、ノード(i)についての形状関数であり、i=1,2,...,9の場合のN(i)は、次のように与えられる。
【数12】
【0099】
上述したステップ420,430,440を用いてROI内の複数の関心のある領域について局所運動ベクトルを推定することができる。完全運動場は、運動推定のために選択された多くの関心のある箇所について推定される局所運動ベクトルの全ての複合又は重ね合わせとして得られる。図14は、標的が脊柱の頸部領域内に位置する実施形態では、完全運動場(多くの推定された局所運動ベクトルから再構成される)をベクトルの形態で概略的に示している。
【0100】
画像位置合わせプロセス中の最終ステップは、標的局所化、即ち、求めた完全運動場から標的の並進及び回転を導き出すことである。一実施形態では、非剛体画像位置合わせは、それぞれの画像収集における互いに異なる座標系相互間の射影マッピング又は変換を決定して同一の解剖学的箇所に相当する各空間中の箇所を互いにマップするようにしようとする。一実施形態では、変換は、1組の非剛体変換パラメータ(dxT,dyT,dzT,r,p,w)によって表され、ここで、(dxT,dyT,dzT)は、標的の並進を表し、(r,p,w)は、標的の回転を表す。
【0101】
一実施形態では、2つの直交x線射影をこれら6つのパラメータについて解く。この実施形態では、各射影における位置合わせを個々に実施し、各射影に関する位置合わせの結果を次に組み合わせて6つの3D変換パラメータを得る。しかしながら、他の実施形態では、互いに異なる射影又はこれらの組合せを用いて変換パラメータについて解いてもよい。
【0102】
図15は、一実施形態による非剛体画像位置合わせ法において三次元治療標的と2つの直交2Dx線射影(図15においてA,Bで表示されている)との間の幾何学的関係を示している。1対のカメラ(又は画像レシーバ)A,Bが、それぞれのx線源(図示せず)からこれらのx線射影を受け取る。3D走査の座標系では、x軸は、紙面の内方に向けられ、図15では指示されていない。上述したように、治療標的の位置の変化は3つの並進及び3つの大域的剛体回転(dx,dy,dz,r,p,w)で表される。
【0103】
図15では、直交2D射影A,Bは、それぞれ、方向OASA,OBSBから見える。射影A,Bの各々に関し、図15は、各射影を特徴付ける画像平面に対して固定されたそれぞれの2D平面座標系を示している。かくして、射影A,Bに関する画像平面A,Bは、それぞれの座標系内の相互に直交した軸線によって規定される。これら軸線は、図15に、射影Aについては(xA,yA)、射影Bについては(xB,yB)として示されている。射影Aに関する2D座標系内における軸線xAの方向と3D走査座標系内におけるx軸の方向は、互いに逆である。射影Bに関する座標系内の軸線xBの方向と3D走査座標系内における軸線xの方向は、同一である。
【0104】
射影Aに関し、2D運動場(dxA,dyA)は、画像平面A上に射影されたx線画像を対応の基準DRR画像に位置合わせすることにより推定される。射影Bに関し、2D運動場(dxB,dyB)は、画像平面B上に射影されたx線画像を対応の基準DRR画像に位置合わせすることにより推定される。射影Aに関し3D運動場(dxA,dyA)、射影Bについて2D運動場(dxB,dyB)とすると、3−D標的並進(dxT,dyT,dzT)並びに大域的剛体回転(r,p,w)を明快な数学的操作により射影A,Bに両方について得ることができる。
【0105】
図5に戻ってこれを参照すると、射影Aについて2D局所運動場(dxA,dyA)であり、射影Bについて2D局所運動場(dxB,dyB)であるとすると、以下の方程式を用いて3−D標的並進(dxT,dyT,dzT)をステップ455(図5に示されている)で容易に得ることができる。
【数13】
【0106】
大域的剛体回転(r,p,w)を射影Aの運動場(dxA,dyA)及び射影Bの運動場(dxB,dyB)から計算することができる。標的を回転中心として用いると、大域的剛体回転は、初期の患者位置合わせ及び治療中、位置及び回転の修正及び補償に役立つ。標的並進が既に計算されているので、大域的並進の計算は不要である。3つの回転を3D患者座標で得るため、先ず最初に、3つの2D平面内回転をコンピュータ処理し、かかる平面内回転としては、射影A,Bにおけるそれぞれの平面内回転θA,θB及び上下軸線に垂直な平面内における平面内回転θxが挙げられる。近似的に、大域的回転を次のように表すことができる。
【数14】
【0107】
θA,θBの推定は、それぞれ射影A,Bにおける2D回転場に直接基づいている。θxを推定するため、先ず最初に標的箇所を通り、3D患者座標系中の軸線xに垂直である平面を定める。次に、射影A,Bのそれぞれの2つの回転場(xA,yA)及び(xB,yB)から運動場を計算する。
【0108】
(dx,dy)が対応の座標(x,y)内における運動場であり、θが大域的回転であると仮定すると、回転が僅かな場合(<10°)、以下の変換方程式が有効である。
【数15】
【0109】
多くの箇所で(dx,dy)及び(x,y)が与えられていると、次の最小二乗最小化法を用いてθを容易に計算することができる。
【数16】
上記方程式(14)及び方程式(16)を用いると、図5に示すステップ160において平均剛体変換パラメータを得ることができる。
【0110】
上述したように得られた非剛体位置合わせの結果を用いると、治療放射線投与中、4D数学的モデルを用いると共に放射線の投与中呼吸(又は他の運動)サイクルをモニタすることにより標的の動的追跡を実施することができる。図16は、患者の呼吸運動を時間の関数としてモニタする表面マーカ340(例えば、赤外LED)を用いて呼吸している患者の体内の運動中の標的を治療用放射線の投与中、動的に追跡する方法を概略的に示している。表面マーカを図16に示す実施形態に関して説明するが、他の実施形態では、患者の表面を追跡するのに他の技術を用いることができる。これら技術としては、ビデオシステム、レーザスキャナ、超音波(又は他の音響)スキャナ及び心拍動を追跡する場合には心電図が挙げられるが、これらには限定されない。患者の表面を追跡するために当該技術分野で知られている任意の方法及び装置を使用できる。
【0111】
治療用放射線の投与中における標的210(即ち、腫瘍/病変部210)の動的追跡は、4D治療計画立案中に得られた4D数学的モデルと無基準手段型追跡により提供された位置合わせ情報を組み合わせ、表面マーカを用いて患者の呼吸運動をモニタすることにより達成できる。上述したように、治療計画立案中に得られた4D数学的モデルは、骨格構造230,232の存在場所を標的210の存在場所に関連付ける。
【0112】
図16に概略的に示すように、無基準手段型追跡を4D計画立案及び表面マーカの動的追跡と関連して用いる場合、動的追跡への多くのアプローチが可能である。第1のアプローチでは、先ず最初に、表面マーカ340を用いて呼吸サイクル中の瞬間を定める。次に、非剛体無基準手段型追跡を用いて剛体基準構造232の存在場所を突き止めることができる。次に、非剛体画像位置合わせを用いて決定された基準存在場所からベクトルを描くことにより腫瘍/病変部210の存在場所を追跡する。表面マーカ340を用いて得られた呼吸サイクル中の瞬間の知識及び標的210の存在場所を剛体骨格構造232の存在場所に関連付ける4D治療計画立案から得られたモデルを用いて存在場所が非剛体画像位置合わせ中に得られた剛体基準構造232からベクトルを描く。
【0113】
第2のアプローチでは、無基準手段型追跡から得られた基準構造232,230の存在場所を用いると共に基準構造232,230の存在場所を4D治療計画立案から得られた病変部210に関連付けるモデルを用いて腫瘍/病変部210の存在場所を突き止める。次に、表面マーカ340の運動を病変部210の運動に関連付ける数学的モデルを構築する。画像処理技術においては、当該技術分野においては、第1の形式の物体の運動を第2の形式の物体の運動に関連付け、かかる関係を数学的モデルにより説明することが知られている。公知であって市販されている場合のあるアルゴリズム又はソフトウェアを用いると、表面マーカ340の運動を病変部210の運動に関連付ける数学的モデルを構築することができる。
【0114】
第3のアプローチでは、4D計画立案中に得られた4Dモデルから決定された基準構造の存在場所を用いて補間法により病変部の存在場所を突き止める。次に、表面マーカ340の運動を病変部210の運動に関連付ける数学的モデルを構築する。この第3のアプローチでは、治療計画立案から得られた4−D計画立案モデルへの依存性が最も低い。
【0115】
最後のアプローチでは、上記段落に記載した2D/3D位置合わせ技術を用いて腫瘍又は病変部210を直接追跡する。このアプローチでは、2D/3D位置合わせの結果だけを用いて表面マーカの運動を標的210の存在場所に関連付けるモデルを直接構築することができる。
【0116】
上述のアプローチのうちの1つを用いて標的の存在場所をいったん突き止めると、放射線ビーム投与を実施するのがよい。先の段落で説明したように突き止められた運動中の解剖学的領域内の標的のリアルタイム存在場所は、ビーム投与のための案内となる。治療計画立案中、当初、ビーム軌跡を、恐らくは運動サイクルをカバーするよう収集された幾つかのCT画像のうちの1つに関して配向するよう選択された名目上の患者座標系に関して規定する。運動サイクル中のこの時点は、表面マーカの運動を分析することにより求められ、各放射線ビームは、この時点からターンオンされることになる。
【0117】
図17は、サイクルPを有する周期運動を行っている解剖学的領域内の標的210を動的に追跡し、治療用放射線を運動中の標的に投与するための装置500の概略ブロック図である。標的としては、腫瘍又は病変部が挙げられる。解剖学的領域としては、標的210に加えて基準構造が挙げられる。基準構造は、周期運動中動かない剛体基準構造232及び解剖学的領域の周期運動中それ自体動く基準構想230を含むのがよい。
【0118】
概要を説明すると、装置500は、周期的に運動している解剖学的領域内の基準構造230又は232に対する標的210の存在場所をリアルタイムで突き止める標的ロケータ510と、4D治療計画を運動中の解剖学的領域に関するサイクルP内における時間的相対位置の関数として作成する4D治療計画立案発生器520と、治療用放射線を治療計画に従って標的にリアルタイムで投与する治療ビーム発生器524とを有している。治療計画は、標的にリアルタイムで投与されるべき所望の放射線量分布を処方し、他方、周期運動中の解剖学的領域の変形を計算に入れている。治療計画立案発生器520を治療放射線投与コントローラ(図示せず)に接続するのがよく、この治療放射線投与コントローラは、治療計画立案発生器520によって作成された治療計画に従って放射線の投与を制御する。
【0119】
また、ロボットシステム(図示せず)が設けられるのがよく、このロボットシステムは、代表的には、固定ベース及び間接連結アーム組立体を有し、このアーム組立体の遠位端部のところには、治療ビーム発生器(例えば、x線源、例えばリナック(線形加速器))が取り付けられるのがよい。ロボットシステムは、投与コントローラ及び治療ビーム発生器(即ち、x線リナック)の方向に応答して移動することができる(そして、配向することができる)。ロボットシステム及び治療ビーム発生器は、例えば共通所有者の米国特許第5,207,223号明細書及び米国特許出願第10/814,451号(代理人事件番号:ACCL−120)明細書に詳細に説明されており、これら特許文献を参照により引用し、これらの記載内容全体を本明細書の一部とする。
【0120】
一実施形態では、標的ロケータ510は、3Dスキャナ520と、DRR発生器530と、x線画像化システム540と、画像位置合わせサブシステム550と、1つ又は2つ以上の運動センサ560と、4Dモデル発生器570と、標的存在場所コンピュータ580とを有している。3Dスキャナ520は、サイクルP内における一連の時点tj(j=1,...,p)の各々において解剖学的領域の複数の3D画像ij(j=1,...,p)を生じさせる。これら3D画像としては、3D CT走査、3D MRI走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査が挙げられるが、これらには限定されない。したがって、3Dスキャナ520は、3D CTスキャナ、3D PETスキャナ、3D MRIスキャナ及び3D超音波スキャナのうち1つであるのがよい。
【0121】
時点tj(j=1,...,p)は、好ましくは、解剖学的領域の周期運動の全範囲を実質的に含むよう選択される。例えば、時点としては、サイクルPの山に相当する第1の時点、サイクルPの谷に相当する第2の時点、及びサイクルPの山と谷との間の中間位置に位置する第3の時点が挙げられる。例えば表面マーカであるのがよい運動センサ560は、解剖学的領域の周囲運動をモニタし、サイクルPを測定する。このように、運動センサ560は、サイクルP内における1つ又は2つ以上の所望の時点の相対位置を表す時間位置データを生じさせる。
【0122】
DRR発生器530は、仮定的放射線を体積3D走査データ中に差し向け、各放射線に沿う3D走査データを統合することにより、各時点tjにおいて3D走査データからDRRを再構築する。x線画像化システム540は、ビームが解剖学的領域の少なくとも一部を横切った後にx線画像化ビームを検出することにより運動中の解剖学的領域内の標的及び基準構造の近リアルタイム2Dx線射影画像を生じさせる。これらx線画像化ビームは、DRRを生じさせるのに用いたのと同一のビーム射影幾何学的形状から生じる。画像位置合わせサブシステム550は、基準構造及び(又は)標的の近リアルタイムx線射影画像を基準構造及び(又は)標的のDRRに位置合わせし、それにより、基準構造及び(又は)標的の存在場所を突き止める。一実施形態では、画像位置合わせサブシステム550は、1)DRR内のROI(関心のある領域)を選択するよう構成されたROIセレクタ620、ROIは、治療標的及び好ましくは少なくとも1つの基準構造を含む、2)フィルタ演算子をDRR及びx線画像に適用することによりDRR及びx線画像を強調するよう構成された画像エンハンサ630、3)DRRとx線画像との間の類似性の測度を求めるよう構成された類似性測度カルキュレータ(計算器)640、4)類似性測度を用いて複数の解像度レベルの各々に関し、ROI内の1つ又は2つ以上の2D局所運動場を推定することにより3D完全運動場を発生させるよう構成された運動場発生器650、5)DRRに示すような治療標的の位置及び向きと比較して、x線画像に示されているような治療標的の位置及び向きの差を表す1組の非剛体変換パラメータを3D完全運動場から求めるよう構成されたパラメータデターミナ(決定器)660を有する。
【0123】
4Dモデル発生器570は、運動中の解剖学的領域内の基準構造232に対する標的210の運動をサイクルP内における時間の関数として説明する4Dモデルを生じさせる。標的存在場所コンピュータ580は、4Dモデル発生器570によって作成された4Dモデルを用いて標的の存在場所と画像位置合わせサブシステム550により突き止められた基準構造の既知の存在場所を相関させ、運動センサ560により得られた時間位置データを用いてサイクルP内における各所望の時点の相対位置を突き止める。
【0124】
一実施形態では、4Dモデル発生器570は、解剖学的領域の変形及び運動をサイクルP内での時間的位置の関数として説明する数学的モデルを構築するよう構成された変形モデル構築器575から成る。この実施形態では、4Dモデル発生器570は、変形モデル構築器により構成された数学的モデルから4Dモデルを導き出す。変形モデル構築器575は、3Dスキャナ520により生じた複数個の画像Ijから、解剖学的領域の変形及び運動に関する情報を含む変形データを引き出す。
【0125】
一実施形態では、変形モデル構築器575は、サイクルP内における時点tjにおいて撮られた各画像とサイクルP内における引き続く時点tj+1で撮られた引き続く画像を位置合わせすることによって変形データを複数の画像から引き出す。変形データに含まれる情報は、基準構造に対する標的の位置及び向きの変化に関する情報を含む。変形モデル構築器575は、運動センサ560からの時間位置データと一緒に変形データを用いて各時点tjについて、サイクルP内における時点tjの相対位置と時点tjにおける標的の変形及び運動を数学的に相関させるよう構成されている。
【0126】
4Dモデル発生器570により作成された4D数学的モデル、画像位置合わせサブシステム550により実施された非剛体画像位置合わせの結果、及び運動センサ560により求められた呼吸サイクル中の時間的相対位置を用いて、標的存在場所コンピュータ580は、治療/病変部の存在場所をコンピュータ処理する。
【0127】
4Dモデル発生器570により作成された4D数学的モデルを用いて、4D治療計画発生器520は、非剛体的に運動している解剖学的領域中への連続放射線ビーム投与に起因する所望の放射線量分布を生じさせる。最後に、治療ビーム発生器524は、所望の放射線量分布に従って治療ビームを発生させ、これら治療ビームをリアルタイムで標的に投与する。
【0128】
以上要するに、例えば周期運動、例えば呼吸に起因して動く解剖学的構造中の腫瘍/病変部を動的に追跡する多くの技術を開示した。これら技術は、関心のある腫瘍/病変部の動的追跡を達成するために、4D治療計画立案、骨格構造又は標的の無基準手段型追跡、及び患者の数学的モデルによる表面マーカの動的追跡を組み合わせている。
【0129】
本発明を特定の実施形態と関連して具体的に図示すると共に説明したが、本発明の精神及び範囲から逸脱することなく、本明細書において説明すると共に図示した技術及び構造の形態及び細部における多くの改造及び変形を行うことができることは理解されるべきである。したがって、本明細書において説明すると共に図示した技術及び構造は、例示であるに過ぎず、本発明の範囲を限定するものと理解されてはならない。本発明の範囲は、特許請求の範囲に基づいて定められ、かかる範囲は、本願の出願時点における公知の均等例及び予測不可能な均等例を含む。
【図面の簡単な説明】
【0130】
【図1】可動標的の基準手段を用いない動的追跡方法の概略流れ図である。
【図2】患者の呼吸サイクル中の互いに異なる時点で撮られた患者の解剖学的構造中の可動標的の術前画像(例えば、3D CT走査)の収集状態を概略的に示す図である。
【図3】a)呼吸につれて動くことはない剛体基準構造及びb)呼吸につれてそれ自体動く多数の基準構造のうちの一方を用いて患者の呼吸サイクルの関数として標的の3D運動の追跡状態を概略的に示す図である。
【図4】標的の2D近リアルタイムx線画像を患者の呼吸サイクル中の特定の時点で撮られた術前3D走査から得られたDRRに位置合わせすることにより治療放射線の投与中における可動標的の無基準手段型追跡方法を概略的に示す図である。
【図5】術前2D DRRと術中x線射影画像との間の2D/3D位置合わせのために使用できる非剛体画像位置合わせアルゴリズムの流れ図である。
【図6】患者の体内における標的内の関心のある箇所について局所運動を推定する際のブロックマッチングの使用法を概略的に示す図である。
【図7】多数の候補者を用いて一実施形態においてマルチレベルブロックマッチングを実施するための多重解像度画像表現法を概略的に示す図である。
【図8】パターン強度に基づく類似性測度を計算するための近傍Rを概略的に示す図である。
【図9】DRRの画像中心と対応のx線画像の画像中心との間の大域的変換の推定法を示す図である。
【図10】標的が脊柱の頸部内に位置する実施形態における標的のDRRについて設定されたメッシュグリッド及び標的のx線画像について設定された対応のメッシュグリッドを概略的に示す図である。
【図11】メッシュ運動推定中のメッシュ階層、比較的粗いメッシュから始まって細かいメッシュに進行しているメッシュ階層を示す図である。
【図12】粗いメッシュ解像レベルから細かいメッシュ解像レベルへのノード推定の経過状態を概略的に示す図である。
【図13】周囲ノードからの補間法による関心のある箇所に関する運動ベクトルの決定法を概略的に示す図である。
【図14】推定した多くの局所運動ベクトルから再構成された完全運動場をベクトル形式で概略的に示す図である。
【図15】3次元治療標的と2つの直交した2Dx線射影像との間の幾何学的関係を示す図である。
【図16】患者の呼吸運動をモニタする表面マーカ(例えば、LED)を用いる治療放射線のリアルタイム投与中における患者の体内の可動標的の動的追跡法を概略的に示す図である。
【図17】周期運動(例えば、呼吸又は心拍動)を行なっている解剖学的領域内の標的を動的に追跡し、治療用放射線を運動中の標的に投与するシステムの概略ブロック図である。
【特許請求の範囲】
【請求項1】
1つ又は2つ以上の基準構造を含む解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して治療用放射線を前記解剖学的領域の運動中、前記標的に投与する方法であって、
前記運動中の解剖学的領域内の前記基準構造に対する前記標的の存在場所をリアルタイムで突き止めるステップと、
前記運動中の解剖学的領域内の前記標的にリアルタイムで投与されるべき前記治療用放射線の所望の量を処方する放射線量分布を生じさせるステップとを有し、前記放射線量分布は、前記運動中における前記解剖学的領域の変形を計算に入れている、方法。
【請求項2】
前記運動は、サイクルPにより特徴付けられる周期運動から成る、請求項1記載の方法。
【請求項3】
前記運動中の解剖学的領域内の前記基準構造に対する前記標的の前記存在場所をリアルタイムで突き止める前記ステップは、
前記標的の3D運動を前記サイクルP内における時間的相対位置の関数として前記基準構造の3D運動と相関させ、前記サイクルP内における前記解剖学的領域の非剛体変形を計算に入れた4D数学的モデルを構築するステップと、
前記解剖学的領域の前記周期運動を動的に追跡して前記サイクルP内における1又は2以上の時点の相対位置をリアルタイムで突き止めることができるようにするステップと、
前記基準構造の1又は2以上の近リアルタイム画像と前記基準構造の1又は2以上の術前画像を位置合わせして前記基準構造の存在場所を近リアルタイムで導くステップと、
前記基準構造の前記近リアルタイム存在場所、前記4D数学的モデル、及び前記サイクルP内における前記時点の前記相対位置を用いて前記標的の存在場所をリアルタイムでコンピュータ処理するステップとを含む、請求項2記載の方法。
【請求項4】
前記解剖学的領域の前記変形及び前記運動を処方する前記4D数学的モデルを構築する前記ステップは、
各々が前記サイクルP内における一連の時点tj(j=1,...,p)のうちの一時点で撮られた前記解剖学的領域の複数個の画像Ij(j=1,...,p)を生じさせるステップと、
前記サイクルP及び前記サイクルP内における各時点tjの相対位置を測定するステップと、
画像Ijを導き出すもととなり且つ前記基準構造に対する前記標的の位置を前記対応の画像Ij中で任意の時点tjにおいて測定することができるもととなる数学的モデルを構築するステップとを含む、請求項3記載の方法。
【請求項5】
前記サイクルP及び前記サイクルP内における時点tjの相対位置を測定する前記ステップは、外部装置を前記解剖学的領域の少なくとも一部に取り付けて前記解剖学的領域の前記一部の存在場所及び向きの変化を前記サイクルP内における前記時点の関数として検出するステップを含む、請求項4記載の方法。
【請求項6】
前記解剖学的領域の前記運動は、呼吸であり、前記サイクルPは、呼吸サイクルであり、前記外部装置は、呼吸センサである、請求項5記載の方法。
【請求項7】
前記解剖学的領域の前記運動は、心拍動であり、前記サイクルPは、心拍動サイクルであり、前記外部装置は、心拍動モニタである、請求項5記載の方法。
【請求項8】
時点tjで撮られた前記複数個の画像は、3D CT走査、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査のうち少なくとも1つから成る、請求項4記載の方法。
【請求項9】
前記解剖学的領域が運動を行なっている間、前記放射線量分布に従って治療用放射線をリアルタイムで前記標的に投与するステップを更に有する、請求項1記載の方法。
【請求項10】
前記時点tj(j=1,...,p)は、前記解剖学的領域の前記周期運動の全範囲を実質的に含む、請求項4記載の方法。
【請求項11】
前記時点は、少なくとも、前記サイクルPの山に対応した第1の時点及び前記サイクルPの谷に相当する第2の時点を含む、請求項10記載の方法。
【請求項12】
前記複数個の画像Ijから、前記サイクルP内における各時点tjでの前記解剖学的領域の前記変形及び前記運動に関する情報を含む変形データを得るステップと、
各時点tjに関し、前記変形データ及び前記測定サイクルPを用いて前記サイクルP内における前記時点tjの前記相対位置を前記時点tjにおける前記標的の前記変形及び前記運動と数学的に相関させるステップとを更に有し、
前記複数個の画像から前記変形データを得る前記ステップは、
前記サイクルP内における時点tjで撮られた各画像を前記サイクルP内の引き続く時点tj+1で撮られた撮られた引き続く画像上にモーフィングするステップを含む、請求項4記載の方法。
【請求項13】
前記変形データに含まれる前記情報は、前記基準構造に対する前記標的の位置及び向きの前記変化に関連した情報を含む、請求項4記載の方法。
【請求項14】
前記標的は、腫瘍及び病変部のうち少なくとも一方であり、前記基準構造は、骨格構造である、請求項1記載の方法。
【請求項15】
前記所望の放射線量分布は、前記所望の時点の各々において前記1つ又は2つ以上の標的に投与されるべき治療的に有効な量の放射線を表わす、請求項1記載の方法。
【請求項16】
前記4D数学的モデルは、前記サイクルP内における任意の時点tjで前記基準構造の前記3D存在場所を前記標的の前記3D存在場所と相関させる、請求項4記載の方法。
【請求項17】
少なくとも1つの基準構造は、前記サイクルP全体を通じて実質的に静止しており、
前記4D数学的モデルは、前記実質的に静止した基準構造に対する前記標的の前記3D存在場所を前記サイクルP内における時間の関数として説明する、請求項16記載の方法。
【請求項18】
少なくとも1つの基準構造は、前記患者の前記周期運動に伴って動き、
前記4D数学的モデルは、i)前記サイクルP中の時間及びii)前記運動中の基準構造の変化する存在場所の複合関数として前記標的の前記3D存在場所を説明する、請求項16記載の方法。
【請求項19】
前記放射線量分布を生じさせる前記ステップは、
時点tjで撮られた画像Ij内に定められた名目上の患者座標系に対する1つ又は2つ以上の放射線ビーム軌跡を特定するステップと、
各ビームに関し、前記ビームが時点tjから先へターンオンされた場合、結果的に前記ビームにより所望の放射線量が投与されることになる前記ビームの持続時間を計算するステップと、
前記解剖学的領域が前記数学的モデルで説明された前記変形及び前記運動を生じたときに、前記時点tjでの前記各ビームのターンオンに起因する放射線量吸収度を時間の関数として計算するステップとを含む、請求項4記載の方法。
【請求項20】
前記解剖学的領域の前記周期運動を動的に追跡する前記ステップは、
1つ又は2つ以上の表面マーカを前記解剖学的領域の表面の少なくとも一部に取り付けるステップと、
前記表面マーカの前記運動をリアルタイムでモニタして前記サイクルPを測定し、それにより前記表面マーカのリアルタイム存在場所を突き止めると共に前記解剖学的領域の前記一部の存在場所及び向きの変化を前記サイクルP内における時間的位置の関数として突き止めるステップとを含む、請求項3記載の方法。
【請求項21】
前記表面マーカは、LED(発光ダイオード)である、請求項20記載の方法。
【請求項22】
前記基準構造の前記近リアルタイム画像と前記基準構造の1つ又は2つ以上の術前3D走査データを位置合わせする前記ステップは、
a)前記術前3D走査データから複数のDRRを再構築するステップと、
b)複数の画像解像レベルの各々について、前記DRRと前記近リアルタイム画像との間の類似性測度を用いて複数の2D局所運動場を推定するステップと、
c)前記複数の2D局所運動場から全運動場を演繹するステップと、
d)前記全運動場から、前記DRRに示された前記基準構造の前記位置及び向きと比較して、前記近リアルタイム画像に示された前記基準構造の前記位置及び向きの差を表わす1組の非剛体変換パラメータを求めるステップとを含む、請求項3記載の方法。
【請求項23】
前記標的の前記近リアルタイム存在場所を突き止める前記ステップは、前記基準構造の前記存在場所から1つ又は2つ以上の3D運動場ベクトルを構成するステップを含む、請求項22記載の方法。
【請求項24】
前記標的の前記リアルタイム存在場所をコンピュータ処理する前記ステップは、
前記近リアルタイム画像と前記基準構造の前記術前画像との間の画像位置合わせの結果を用いて前記基準構造の存在場所を突き止めるステップと、
前記4D数学的モデル及び前記画像位置合わせの前記結果により突き止められた前記基準構造の前記存在場所を用いて前記標的の対応の存在場所を見出すステップと、
請求項20で突き止められた前記表面マーカの前記リアルタイム存在場所を用いて前記表面マーカの前記リアルタイム存在場所を前記標的の前記リアルタイム存在場所に関連付けるマーカ−標的相関モデルを構築するステップとを含む、請求項20記載の方法。
【請求項25】
前記標的の前記リアルタイム存在場所をコンピュータ処理する前記ステップは、
前記近リアルタイム画像と前記基準構造の前記術前画像との間の画像位置合わせの結果を用いて前記基準構造の存在場所を突き止めるステップと、
前記基準構造の存在場所から補間して前記標的の存在場所を突き止めるステップと
請求項20で突き止められた前記表面マーカの前記リアルタイム存在場所を用いて前記表面マーカの前記リアルタイム存在場所を前記標的の前記リアルタイム存在場所に関連付けるマーカ−標的相関モデルを構築するステップとを含む、請求項20記載の方法。
【請求項26】
1つ又は2つ以上の基準構造を含む解剖学的領域内の1つ又は2つ以上の標的を動的に追跡し、前記解剖学的領域が運動サイクルPを特徴とする周期運動を行なっている間に治療用放射線を前記標的に投与する方法であって、
前記周期運動をモニタして前記サイクルPを測定するステップと、
前記運動中の解剖学的領域内における前記基準構造に対する前記標的の存在場所をリアルタイムで突き止めるステップと、
前記解剖学的領域が前記周期運動を行なっているときに前記標的に対してリアルタイムで放射線治療を行なうステップとを有する、方法。
【請求項27】
前記基準構造に対する前記標的の存在場所をリアルタイムで突き止める前記ステップは、
前記サイクルP内における時間の関数として前記解剖学的領域の非剛体変形を説明し、前記サイクルP内における前記時間の関数として前記基準構造に対する前記標的の3D運動を説明する4D数学的モデルを構築するステップと、
前記基準構造の近リアルタイム画像と前記基準構造の術前画像を位置合わせすることにより複数の時点ti(i=1,...,N)の各々において前記基準構造の前記リアルタイム存在場所を突き止め、前記解剖学的領域の前記周期運動をモニタして前記サイクルP内における各時点tiの相対位置を突き止めるステップと、
前記基準構造の前記近リアルタイム存在場所及び前記サイクルP内における各時点tiの既知の位置を用いて各時点tiにおける前記標的のリアルタイム存在場所をコンピュータ処理するステップとを含む、請求項26記載の方法。
【請求項28】
少なくとも1つの基準構造を含む解剖学的領域内の1つ又は2つ以上の標的を動的に追跡し、前記解剖学的領域がサイクルPを特徴とする周期運動を行なっている間、治療用放射線を前記標的に投与する方法であって、
前記解剖学的領域の非剛体変形及び前記基準構造に対する前記標的の3D運動を前記サイクルP内における時間の関数として説明する4D数学的モデルを構築するステップと、
前記数学的モデルを用いて前記標的への治療用放射線の投与のための所望の放射線量分布を生じさせるステップと、
前記基準構造の1つ又は2つ以上の近リアルタイム画像と前記基準構造の1つ又は2つ以上の術前画像を位置合わせし、前記解剖学的領域の前記周期運動を動的に追跡して前記サイクルP内における所望の時点の相対位置を突き止めて前記基準構造のリアルタイム存在場所を導き出すステップと、
前記基準構造の前記リアルタイム存在場所、前記4D数学的モデル、及び前記サイクルP内における所望の時点の前記相対位置の知識を用いて前記標的のリアルタイム存在場所をコンピュータ処理するステップと、
前記所望の放射線量分布に従って前記標的の前記リアルタイム存在場所に治療用放射線を投与するステップとを有する、方法。
【請求項29】
患者の解剖学的領域内の1つ又は2つ以上の標的を動的に追跡し、前記患者がサイクルPを特徴とする周期運動を行なっている間、治療用放射線を前記1つ又は2つ以上の標的に投与する方法であって、
前記解剖学的領域は少なくとも1つの基準構造を含み、前記方法は、前記標的の術前走査データから前記解剖学的領域の非剛体変形を前記サイクルP内における時間の関数として説明すると共に前記基準構造に対する前記標的の3D運動を説明する4D数学的モデルを構築するステップと、
前記数学的モデルから、前記サイクルP全体を通じて治療用放射線を前記1つ又は2つ以上の標的に投与するための放射線量分布を生じさせるステップと、前記基準構造の近リアルタイム2D画像と前記基準構造の術前3D走査の非剛体画像位置合わせを実施するステップと、
前記解剖学的領域の少なくとも一部に取り付けられた1つ又は2つ以上の追跡装置を用いて前記サイクルP内における少なくとも1つの時点の相対位置を突き止めるステップと、
前記非剛体画像位置合わせ及び前記4D数学的モデルの結果を用いて前記少なくとも1つの時点における前記標的の存在場所をリアルタイムでコンピュータ処理するステップと、
前記所望の放射線量分布に従って前記サイクルP内における少なくとも1つの時点における前記標的の前記リアルタイム存在場所に治療用放射線を投与するステップとを有する、方法。
【請求項30】
前記追跡装置は、
レーザスキャナ、
ビデオシステム、
超音波スキャナ、及び
心電図
のうち少なくとも1つである、請求項29記載の方法。
【請求項31】
1つ又は2つ以上の基準構造を含むと共に運動を行なう解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して治療用放射線を前記標的に投与する装置であって、
前記周期的に運動する解剖学的領域内の前記基準構造に対する前記標的の存在場所をリアルタイムで突き止めるよう構成された標的ロケータと、
前記運動中の解剖学的領域に関して4D治療計画を時間の関数として生じさせるよう構成された4D治療計画立案発生器とを有し、前記治療計画は、前記標的にリアルタイムで投与されるべき所望の放射線量分布を処方すると共に前記運動中における前記解剖学的領域の変形を計算に入れている、装置。
【請求項32】
前記運動は、周期サイクルPを特徴とする周期運動である、請求項31記載の装置。
【請求項33】
前記標的ロケータは、
a)前記サイクルP内における一連の時点tj(j=1,...,p)の各々において前記解剖学的領域の複数の3D画像Ij(j=1,...,p)を生じさせるよう構成された3Dスキャナと、
b)仮定的放射線を体積3D走査データ中に差し向け、各放射線に沿う前記3D走査データを統合することにより、各時点tjにおいて前記3D走査データからDRRを再構築するよう構成されたDRR発生器と、
c)前記運動中の解剖学的領域内の前記標的及び前記基準構造の近リアルタイム2Dx線射影画像を生じさせるよう構成されたx線画像化システムと、
d)前記基準構造の前記近リアルタイムx線射影画像と前記基準構造の前記DRRを位置合わせし、それにより基準構造の存在場所を突き止めるよう構成された画像位置合わせサブシステムと、
e)前記解剖学的領域の前記周期運動をモニタすると共に前記サイクルPを測定し、それにより前記サイクルP内における1つ又は2つ以上の所望の時点の相対位置を表わす時間位置データを生じさせるよう構成された1つ又は2つ以上の運動センサと、
f)前記運動中の解剖学的領域内の前記基準構造に対する前記標的の運動を前記サイクルP内における時間の関数として説明する4D数学的モデルを生じさせるよう構成された4Dモデル発生器と、
g)前記4D数学的モデルを用いて前記標的の存在場所と前記画像位置合わせサブシステムにより突き止められた前記基準構造の既知の存在場所を相関させ、前記時間位置データを用いて前記サイクルP内における各所望の時点の相対位置を突き止めることにより、前記1つ又は2つ以上の所望の時点における前記標的の存在場所をリアルタイムでコンピュータ処理するよう構成された標的存在場所コンピュータとを有する、装置。
【請求項34】
前記4Dモデル発生器は、前記解剖学的領域の前記変形及び前記運動を前記サイクルP内での時間的位置の関数として説明する数学的モデルを構築するよう構成された変形モデル構築器から成り、
前記変形モデル構築器は、前記3Dスキャナにより生じた前記複数個の画像Ijから、前記解剖学的領域の前記変形及び前記運動に関する情報を含む変形データを引き出すよう構成されており、
前記変形モデル構築器は、前記変形データ及び前記時間位置データを用いて各時点tjについて、前記サイクルP内における前記時点tjの前記相対位置と前記時点tjにおける前記標的の前記変形及び前記運動を数学的に相関させるよう構成されている、請求項33記載の装置。
【請求項35】
前記解剖学的領域の前記運動は、呼吸であり、前記サイクルPは、呼吸サイクルである、請求項32記載の装置。
【請求項36】
前記運動センサは、呼吸センサから成る、請求項35記載の装置。
【請求項37】
前記解剖学的領域の前記運動は、心拍動であり、前記サイクルPは、心拍動サイクルであり、前記運動センサは、心拍動モニタである、請求項32記載の装置。
【請求項38】
時点tjで撮られた前記複数個の画像は、3D CT走査、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査のうち少なくとも1つから成る、請求項33記載の装置。
【請求項39】
前記解剖学的領域の前記周期運動を生じている間、前記放射線量分布に従って治療用放射線を前記標的にリアルタイムで投与するよう構成された治療ビーム発生器を更に有する、請求項32記載の装置。
【請求項40】
前記センサは、
表面マーカ、
レーザスキャナ、
ビデオシステム、
超音波スキャナ、及び
心電図
のうち少なくとも1つである、請求項32記載の装置。
【請求項41】
前記時点tj(j=1,...,p)は、前記解剖学的領域の前記周期運動の全範囲を実質的に含むよう選択されている、請求項4記載の方法。
【請求項42】
前記時点は、少なくとも、前記サイクルPの山に対応した第1の時点及び前記サイクルPの谷に相当する第2の時点を含む、請求項33記載の装置。
【請求項43】
前記複数個の画像から前記変形データを導き出す前記ステップは、
前記サイクルP内における時点tjにおいて撮られた各画像と前記サイクルP内における引き続く時点tj+1で撮られた引き続く画像を位置合わせするステップを含む、請求項35記載の装置。
【請求項44】
前記変形データに含まれる前記情報は、前記基準構造に対する前記標的の位置及び向きの前記変化に関連した情報を含む、請求項35記載の装置。
【請求項45】
前記標的は、腫瘍及び病変部のうち少なくとも一方であり、前記基準構造は、骨格構造である、請求項32記載の装置。
【請求項46】
前記所望の放射線量分布は、前記所望の時点の各々において前記1つ又は2つ以上の標的に投与されるべき治療的に有効な量の放射線を表わす、請求項32記載の装置。
【請求項47】
前記3Dスキャナは、
3D CT走査、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査のうち少なくとも1つから成る、請求項32記載の装置。
【請求項48】
解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して治療用放射線を前記標的に投与する装置であって、前記解剖学的領域は、1つ又は2つ以上の基準構造を含み、前記解剖学的領域は、サイクルPを有する、周期運動を行なって前記標的と前記基準構造との間の相対位置が時間につれて周期的に変化するようになっており、前記装置は、
前記周期P内における一連の時点Tjの各々において体積3D走査データを生じさせるよう構成された3D走査データ発生器を有し、
前記走査データ発生器に結合された1つ又は2つ以上の運動センサを有し、前記運動センサは、前記サイクルP内における各所望の時点Tjの時間的相対位置を表わす出力信号を発生させて前記3D走査データ発生器を前記サイクルP内における時間的にあらかじめ選択された位置で作動させることができるように構成されており、
仮定的放射線を体積3D走査データ中に差し向け、各放射線に沿う前記3D走査データを統合することにより、各時点tjにおいて前記3D走査データからDRRを再構築するよう構成されたDRR発生器を有し、
前記運動中の幾何学的領域について前記サイクルP内における時間的相対位置の関数として治療計画を生じさせるよう構成された4D治療計画立案プロセッサを有し、前記標的と前記基準構造との相対位置は、時間につれて周期的に変化し、前記治療計画は、前記解剖学的領域が前記周期運動を行なっているとき、前記運動中の標的に投与されるべき治療用放射線の所望の放射線量分布を表わし、
前記4D治療計画立案プロセッサは、各時点Tjにおいて前記DRRの受け取りに応答して、Tj-1で生じた前記DRRと比較して、Tjで生じた前記DRRに示すように前記解剖学的領域の非剛体変形を表わすパラメータPj発生させると共に前記サイクルP内における前記時点Tjの時間的相対位置の関数としてこれらパラメータPjを数学的モデルで説明するよう構成され、
前記運動中の解剖学的領域内の前記標的及び前記基準構造の近リアルタイム2Dx線射影画像を生じさせるよう構成されたx線画像化システムを有し、
前記近リアルタイムx線射影画像と前記DRRを位置合わせして前記基準構造及び前記標的のうちの少なくとも一方の前記近リアルタイム存在場所を前記解剖学的領域の前記周期運動全体を通じて突き止めることができるよう構成された画像位置合わせプロセッサを有し、
作動時に、治療効果を前記標的に生じさせるのに十分な強度を有する1本又は2本以上のビームx線を生じさせるよう構成された治療ビーム発生器を有し、
前記解剖学的領域の外面の少なくとも一部に取り付けられた1つ又は2つ以上の表面マーカを有し、前記表面マーカは、前記解剖学的領域の周期運動を検出すると共に前記期間P内における1つ又は2つ以上の所望の時点の前記相対位置時間を表わす出力信号を発生させるように構成されており、
前記治療ビーム発生器に結合されていて、前記4D治療計画立案プロセッサ、前記画像位置合わせプロセッサ、及び前記表面マーカの出力に応答するコントローラを有し、前記コントローラは、前記解剖学的領域が前記周期運動を行なっている間、前記所望の放射線量分布に従って治療用放射線の1本又は2本以上のビームを前記運動中の標的に投与するよう前記治療ビーム発生器を作動させるよう構成されている、装置。
【請求項49】
前記運動中の解剖学的領域内の前記基準構造に対する前記標的の前記存在場所をリアルタイムで突き止める前記ステップは、
前記標的の3D運動を前記サイクルP内における時間的相対位置の関数として前記基準構造の3D運動と相関させ、前記サイクルP内における前記解剖学的領域の非剛体変形を計算に入れた4D数学的モデルを構築するステップと、
前記解剖学的領域の前記運動を動的に追跡して前記サイクルP内における1又は2以上の時点の相対位置をリアルタイムで突き止めることができるようにするステップと、
前記基準構造の1又は2以上の近リアルタイム画像と前記基準構造の1又は2以上の術前画像を位置合わせして前記基準構造の存在場所を近リアルタイムで導くステップと、
前記基準構造の前記近リアルタイム存在場所、前記4D数学的モデル、及び前記サイクルP内における前記時点の前記相対位置を用いて前記標的の存在場所をリアルタイムでコンピュータ処理するステップとを含む、請求項1記載の方法。
【請求項50】
前記運動中の解剖学的領域の前記変形は、非剛体変形及び剛体変形のうちの一方である、請求項1記載の方法。
【請求項51】
前記解剖学的領域の前記周期運動を動的に追跡する前記ステップは、
追跡装置を前記解剖学的領域の表面の少なくとも一部に取り付けるステップと、
前記追跡装置をリアルタイムでモニタして前記サイクルPを測定し、前記サイクルP内における時間的位置の関数として前記解剖学的領域の表面の前記一部の存在場所及び向きの変化を突き止めるステップとを含む、請求項3記載の方法。
【請求項52】
前記追跡装置は、
レーザスキャナ、
ビデオシステム、
超音波スキャナ、及び
心電図
のうち少なくとも1つである、請求項51記載の方法。
【請求項1】
1つ又は2つ以上の基準構造を含む解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して治療用放射線を前記解剖学的領域の運動中、前記標的に投与する方法であって、
前記運動中の解剖学的領域内の前記基準構造に対する前記標的の存在場所をリアルタイムで突き止めるステップと、
前記運動中の解剖学的領域内の前記標的にリアルタイムで投与されるべき前記治療用放射線の所望の量を処方する放射線量分布を生じさせるステップとを有し、前記放射線量分布は、前記運動中における前記解剖学的領域の変形を計算に入れている、方法。
【請求項2】
前記運動は、サイクルPにより特徴付けられる周期運動から成る、請求項1記載の方法。
【請求項3】
前記運動中の解剖学的領域内の前記基準構造に対する前記標的の前記存在場所をリアルタイムで突き止める前記ステップは、
前記標的の3D運動を前記サイクルP内における時間的相対位置の関数として前記基準構造の3D運動と相関させ、前記サイクルP内における前記解剖学的領域の非剛体変形を計算に入れた4D数学的モデルを構築するステップと、
前記解剖学的領域の前記周期運動を動的に追跡して前記サイクルP内における1又は2以上の時点の相対位置をリアルタイムで突き止めることができるようにするステップと、
前記基準構造の1又は2以上の近リアルタイム画像と前記基準構造の1又は2以上の術前画像を位置合わせして前記基準構造の存在場所を近リアルタイムで導くステップと、
前記基準構造の前記近リアルタイム存在場所、前記4D数学的モデル、及び前記サイクルP内における前記時点の前記相対位置を用いて前記標的の存在場所をリアルタイムでコンピュータ処理するステップとを含む、請求項2記載の方法。
【請求項4】
前記解剖学的領域の前記変形及び前記運動を処方する前記4D数学的モデルを構築する前記ステップは、
各々が前記サイクルP内における一連の時点tj(j=1,...,p)のうちの一時点で撮られた前記解剖学的領域の複数個の画像Ij(j=1,...,p)を生じさせるステップと、
前記サイクルP及び前記サイクルP内における各時点tjの相対位置を測定するステップと、
画像Ijを導き出すもととなり且つ前記基準構造に対する前記標的の位置を前記対応の画像Ij中で任意の時点tjにおいて測定することができるもととなる数学的モデルを構築するステップとを含む、請求項3記載の方法。
【請求項5】
前記サイクルP及び前記サイクルP内における時点tjの相対位置を測定する前記ステップは、外部装置を前記解剖学的領域の少なくとも一部に取り付けて前記解剖学的領域の前記一部の存在場所及び向きの変化を前記サイクルP内における前記時点の関数として検出するステップを含む、請求項4記載の方法。
【請求項6】
前記解剖学的領域の前記運動は、呼吸であり、前記サイクルPは、呼吸サイクルであり、前記外部装置は、呼吸センサである、請求項5記載の方法。
【請求項7】
前記解剖学的領域の前記運動は、心拍動であり、前記サイクルPは、心拍動サイクルであり、前記外部装置は、心拍動モニタである、請求項5記載の方法。
【請求項8】
時点tjで撮られた前記複数個の画像は、3D CT走査、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査のうち少なくとも1つから成る、請求項4記載の方法。
【請求項9】
前記解剖学的領域が運動を行なっている間、前記放射線量分布に従って治療用放射線をリアルタイムで前記標的に投与するステップを更に有する、請求項1記載の方法。
【請求項10】
前記時点tj(j=1,...,p)は、前記解剖学的領域の前記周期運動の全範囲を実質的に含む、請求項4記載の方法。
【請求項11】
前記時点は、少なくとも、前記サイクルPの山に対応した第1の時点及び前記サイクルPの谷に相当する第2の時点を含む、請求項10記載の方法。
【請求項12】
前記複数個の画像Ijから、前記サイクルP内における各時点tjでの前記解剖学的領域の前記変形及び前記運動に関する情報を含む変形データを得るステップと、
各時点tjに関し、前記変形データ及び前記測定サイクルPを用いて前記サイクルP内における前記時点tjの前記相対位置を前記時点tjにおける前記標的の前記変形及び前記運動と数学的に相関させるステップとを更に有し、
前記複数個の画像から前記変形データを得る前記ステップは、
前記サイクルP内における時点tjで撮られた各画像を前記サイクルP内の引き続く時点tj+1で撮られた撮られた引き続く画像上にモーフィングするステップを含む、請求項4記載の方法。
【請求項13】
前記変形データに含まれる前記情報は、前記基準構造に対する前記標的の位置及び向きの前記変化に関連した情報を含む、請求項4記載の方法。
【請求項14】
前記標的は、腫瘍及び病変部のうち少なくとも一方であり、前記基準構造は、骨格構造である、請求項1記載の方法。
【請求項15】
前記所望の放射線量分布は、前記所望の時点の各々において前記1つ又は2つ以上の標的に投与されるべき治療的に有効な量の放射線を表わす、請求項1記載の方法。
【請求項16】
前記4D数学的モデルは、前記サイクルP内における任意の時点tjで前記基準構造の前記3D存在場所を前記標的の前記3D存在場所と相関させる、請求項4記載の方法。
【請求項17】
少なくとも1つの基準構造は、前記サイクルP全体を通じて実質的に静止しており、
前記4D数学的モデルは、前記実質的に静止した基準構造に対する前記標的の前記3D存在場所を前記サイクルP内における時間の関数として説明する、請求項16記載の方法。
【請求項18】
少なくとも1つの基準構造は、前記患者の前記周期運動に伴って動き、
前記4D数学的モデルは、i)前記サイクルP中の時間及びii)前記運動中の基準構造の変化する存在場所の複合関数として前記標的の前記3D存在場所を説明する、請求項16記載の方法。
【請求項19】
前記放射線量分布を生じさせる前記ステップは、
時点tjで撮られた画像Ij内に定められた名目上の患者座標系に対する1つ又は2つ以上の放射線ビーム軌跡を特定するステップと、
各ビームに関し、前記ビームが時点tjから先へターンオンされた場合、結果的に前記ビームにより所望の放射線量が投与されることになる前記ビームの持続時間を計算するステップと、
前記解剖学的領域が前記数学的モデルで説明された前記変形及び前記運動を生じたときに、前記時点tjでの前記各ビームのターンオンに起因する放射線量吸収度を時間の関数として計算するステップとを含む、請求項4記載の方法。
【請求項20】
前記解剖学的領域の前記周期運動を動的に追跡する前記ステップは、
1つ又は2つ以上の表面マーカを前記解剖学的領域の表面の少なくとも一部に取り付けるステップと、
前記表面マーカの前記運動をリアルタイムでモニタして前記サイクルPを測定し、それにより前記表面マーカのリアルタイム存在場所を突き止めると共に前記解剖学的領域の前記一部の存在場所及び向きの変化を前記サイクルP内における時間的位置の関数として突き止めるステップとを含む、請求項3記載の方法。
【請求項21】
前記表面マーカは、LED(発光ダイオード)である、請求項20記載の方法。
【請求項22】
前記基準構造の前記近リアルタイム画像と前記基準構造の1つ又は2つ以上の術前3D走査データを位置合わせする前記ステップは、
a)前記術前3D走査データから複数のDRRを再構築するステップと、
b)複数の画像解像レベルの各々について、前記DRRと前記近リアルタイム画像との間の類似性測度を用いて複数の2D局所運動場を推定するステップと、
c)前記複数の2D局所運動場から全運動場を演繹するステップと、
d)前記全運動場から、前記DRRに示された前記基準構造の前記位置及び向きと比較して、前記近リアルタイム画像に示された前記基準構造の前記位置及び向きの差を表わす1組の非剛体変換パラメータを求めるステップとを含む、請求項3記載の方法。
【請求項23】
前記標的の前記近リアルタイム存在場所を突き止める前記ステップは、前記基準構造の前記存在場所から1つ又は2つ以上の3D運動場ベクトルを構成するステップを含む、請求項22記載の方法。
【請求項24】
前記標的の前記リアルタイム存在場所をコンピュータ処理する前記ステップは、
前記近リアルタイム画像と前記基準構造の前記術前画像との間の画像位置合わせの結果を用いて前記基準構造の存在場所を突き止めるステップと、
前記4D数学的モデル及び前記画像位置合わせの前記結果により突き止められた前記基準構造の前記存在場所を用いて前記標的の対応の存在場所を見出すステップと、
請求項20で突き止められた前記表面マーカの前記リアルタイム存在場所を用いて前記表面マーカの前記リアルタイム存在場所を前記標的の前記リアルタイム存在場所に関連付けるマーカ−標的相関モデルを構築するステップとを含む、請求項20記載の方法。
【請求項25】
前記標的の前記リアルタイム存在場所をコンピュータ処理する前記ステップは、
前記近リアルタイム画像と前記基準構造の前記術前画像との間の画像位置合わせの結果を用いて前記基準構造の存在場所を突き止めるステップと、
前記基準構造の存在場所から補間して前記標的の存在場所を突き止めるステップと
請求項20で突き止められた前記表面マーカの前記リアルタイム存在場所を用いて前記表面マーカの前記リアルタイム存在場所を前記標的の前記リアルタイム存在場所に関連付けるマーカ−標的相関モデルを構築するステップとを含む、請求項20記載の方法。
【請求項26】
1つ又は2つ以上の基準構造を含む解剖学的領域内の1つ又は2つ以上の標的を動的に追跡し、前記解剖学的領域が運動サイクルPを特徴とする周期運動を行なっている間に治療用放射線を前記標的に投与する方法であって、
前記周期運動をモニタして前記サイクルPを測定するステップと、
前記運動中の解剖学的領域内における前記基準構造に対する前記標的の存在場所をリアルタイムで突き止めるステップと、
前記解剖学的領域が前記周期運動を行なっているときに前記標的に対してリアルタイムで放射線治療を行なうステップとを有する、方法。
【請求項27】
前記基準構造に対する前記標的の存在場所をリアルタイムで突き止める前記ステップは、
前記サイクルP内における時間の関数として前記解剖学的領域の非剛体変形を説明し、前記サイクルP内における前記時間の関数として前記基準構造に対する前記標的の3D運動を説明する4D数学的モデルを構築するステップと、
前記基準構造の近リアルタイム画像と前記基準構造の術前画像を位置合わせすることにより複数の時点ti(i=1,...,N)の各々において前記基準構造の前記リアルタイム存在場所を突き止め、前記解剖学的領域の前記周期運動をモニタして前記サイクルP内における各時点tiの相対位置を突き止めるステップと、
前記基準構造の前記近リアルタイム存在場所及び前記サイクルP内における各時点tiの既知の位置を用いて各時点tiにおける前記標的のリアルタイム存在場所をコンピュータ処理するステップとを含む、請求項26記載の方法。
【請求項28】
少なくとも1つの基準構造を含む解剖学的領域内の1つ又は2つ以上の標的を動的に追跡し、前記解剖学的領域がサイクルPを特徴とする周期運動を行なっている間、治療用放射線を前記標的に投与する方法であって、
前記解剖学的領域の非剛体変形及び前記基準構造に対する前記標的の3D運動を前記サイクルP内における時間の関数として説明する4D数学的モデルを構築するステップと、
前記数学的モデルを用いて前記標的への治療用放射線の投与のための所望の放射線量分布を生じさせるステップと、
前記基準構造の1つ又は2つ以上の近リアルタイム画像と前記基準構造の1つ又は2つ以上の術前画像を位置合わせし、前記解剖学的領域の前記周期運動を動的に追跡して前記サイクルP内における所望の時点の相対位置を突き止めて前記基準構造のリアルタイム存在場所を導き出すステップと、
前記基準構造の前記リアルタイム存在場所、前記4D数学的モデル、及び前記サイクルP内における所望の時点の前記相対位置の知識を用いて前記標的のリアルタイム存在場所をコンピュータ処理するステップと、
前記所望の放射線量分布に従って前記標的の前記リアルタイム存在場所に治療用放射線を投与するステップとを有する、方法。
【請求項29】
患者の解剖学的領域内の1つ又は2つ以上の標的を動的に追跡し、前記患者がサイクルPを特徴とする周期運動を行なっている間、治療用放射線を前記1つ又は2つ以上の標的に投与する方法であって、
前記解剖学的領域は少なくとも1つの基準構造を含み、前記方法は、前記標的の術前走査データから前記解剖学的領域の非剛体変形を前記サイクルP内における時間の関数として説明すると共に前記基準構造に対する前記標的の3D運動を説明する4D数学的モデルを構築するステップと、
前記数学的モデルから、前記サイクルP全体を通じて治療用放射線を前記1つ又は2つ以上の標的に投与するための放射線量分布を生じさせるステップと、前記基準構造の近リアルタイム2D画像と前記基準構造の術前3D走査の非剛体画像位置合わせを実施するステップと、
前記解剖学的領域の少なくとも一部に取り付けられた1つ又は2つ以上の追跡装置を用いて前記サイクルP内における少なくとも1つの時点の相対位置を突き止めるステップと、
前記非剛体画像位置合わせ及び前記4D数学的モデルの結果を用いて前記少なくとも1つの時点における前記標的の存在場所をリアルタイムでコンピュータ処理するステップと、
前記所望の放射線量分布に従って前記サイクルP内における少なくとも1つの時点における前記標的の前記リアルタイム存在場所に治療用放射線を投与するステップとを有する、方法。
【請求項30】
前記追跡装置は、
レーザスキャナ、
ビデオシステム、
超音波スキャナ、及び
心電図
のうち少なくとも1つである、請求項29記載の方法。
【請求項31】
1つ又は2つ以上の基準構造を含むと共に運動を行なう解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して治療用放射線を前記標的に投与する装置であって、
前記周期的に運動する解剖学的領域内の前記基準構造に対する前記標的の存在場所をリアルタイムで突き止めるよう構成された標的ロケータと、
前記運動中の解剖学的領域に関して4D治療計画を時間の関数として生じさせるよう構成された4D治療計画立案発生器とを有し、前記治療計画は、前記標的にリアルタイムで投与されるべき所望の放射線量分布を処方すると共に前記運動中における前記解剖学的領域の変形を計算に入れている、装置。
【請求項32】
前記運動は、周期サイクルPを特徴とする周期運動である、請求項31記載の装置。
【請求項33】
前記標的ロケータは、
a)前記サイクルP内における一連の時点tj(j=1,...,p)の各々において前記解剖学的領域の複数の3D画像Ij(j=1,...,p)を生じさせるよう構成された3Dスキャナと、
b)仮定的放射線を体積3D走査データ中に差し向け、各放射線に沿う前記3D走査データを統合することにより、各時点tjにおいて前記3D走査データからDRRを再構築するよう構成されたDRR発生器と、
c)前記運動中の解剖学的領域内の前記標的及び前記基準構造の近リアルタイム2Dx線射影画像を生じさせるよう構成されたx線画像化システムと、
d)前記基準構造の前記近リアルタイムx線射影画像と前記基準構造の前記DRRを位置合わせし、それにより基準構造の存在場所を突き止めるよう構成された画像位置合わせサブシステムと、
e)前記解剖学的領域の前記周期運動をモニタすると共に前記サイクルPを測定し、それにより前記サイクルP内における1つ又は2つ以上の所望の時点の相対位置を表わす時間位置データを生じさせるよう構成された1つ又は2つ以上の運動センサと、
f)前記運動中の解剖学的領域内の前記基準構造に対する前記標的の運動を前記サイクルP内における時間の関数として説明する4D数学的モデルを生じさせるよう構成された4Dモデル発生器と、
g)前記4D数学的モデルを用いて前記標的の存在場所と前記画像位置合わせサブシステムにより突き止められた前記基準構造の既知の存在場所を相関させ、前記時間位置データを用いて前記サイクルP内における各所望の時点の相対位置を突き止めることにより、前記1つ又は2つ以上の所望の時点における前記標的の存在場所をリアルタイムでコンピュータ処理するよう構成された標的存在場所コンピュータとを有する、装置。
【請求項34】
前記4Dモデル発生器は、前記解剖学的領域の前記変形及び前記運動を前記サイクルP内での時間的位置の関数として説明する数学的モデルを構築するよう構成された変形モデル構築器から成り、
前記変形モデル構築器は、前記3Dスキャナにより生じた前記複数個の画像Ijから、前記解剖学的領域の前記変形及び前記運動に関する情報を含む変形データを引き出すよう構成されており、
前記変形モデル構築器は、前記変形データ及び前記時間位置データを用いて各時点tjについて、前記サイクルP内における前記時点tjの前記相対位置と前記時点tjにおける前記標的の前記変形及び前記運動を数学的に相関させるよう構成されている、請求項33記載の装置。
【請求項35】
前記解剖学的領域の前記運動は、呼吸であり、前記サイクルPは、呼吸サイクルである、請求項32記載の装置。
【請求項36】
前記運動センサは、呼吸センサから成る、請求項35記載の装置。
【請求項37】
前記解剖学的領域の前記運動は、心拍動であり、前記サイクルPは、心拍動サイクルであり、前記運動センサは、心拍動モニタである、請求項32記載の装置。
【請求項38】
時点tjで撮られた前記複数個の画像は、3D CT走査、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査のうち少なくとも1つから成る、請求項33記載の装置。
【請求項39】
前記解剖学的領域の前記周期運動を生じている間、前記放射線量分布に従って治療用放射線を前記標的にリアルタイムで投与するよう構成された治療ビーム発生器を更に有する、請求項32記載の装置。
【請求項40】
前記センサは、
表面マーカ、
レーザスキャナ、
ビデオシステム、
超音波スキャナ、及び
心電図
のうち少なくとも1つである、請求項32記載の装置。
【請求項41】
前記時点tj(j=1,...,p)は、前記解剖学的領域の前記周期運動の全範囲を実質的に含むよう選択されている、請求項4記載の方法。
【請求項42】
前記時点は、少なくとも、前記サイクルPの山に対応した第1の時点及び前記サイクルPの谷に相当する第2の時点を含む、請求項33記載の装置。
【請求項43】
前記複数個の画像から前記変形データを導き出す前記ステップは、
前記サイクルP内における時点tjにおいて撮られた各画像と前記サイクルP内における引き続く時点tj+1で撮られた引き続く画像を位置合わせするステップを含む、請求項35記載の装置。
【請求項44】
前記変形データに含まれる前記情報は、前記基準構造に対する前記標的の位置及び向きの前記変化に関連した情報を含む、請求項35記載の装置。
【請求項45】
前記標的は、腫瘍及び病変部のうち少なくとも一方であり、前記基準構造は、骨格構造である、請求項32記載の装置。
【請求項46】
前記所望の放射線量分布は、前記所望の時点の各々において前記1つ又は2つ以上の標的に投与されるべき治療的に有効な量の放射線を表わす、請求項32記載の装置。
【請求項47】
前記3Dスキャナは、
3D CT走査、3D MRI(磁気共鳴画像法)走査、3D PET(ポジトロンエミッショントモグラフィ)走査、及び3D超音波走査のうち少なくとも1つから成る、請求項32記載の装置。
【請求項48】
解剖学的領域内の1つ又は2つ以上の標的を動的に追跡して治療用放射線を前記標的に投与する装置であって、前記解剖学的領域は、1つ又は2つ以上の基準構造を含み、前記解剖学的領域は、サイクルPを有する、周期運動を行なって前記標的と前記基準構造との間の相対位置が時間につれて周期的に変化するようになっており、前記装置は、
前記周期P内における一連の時点Tjの各々において体積3D走査データを生じさせるよう構成された3D走査データ発生器を有し、
前記走査データ発生器に結合された1つ又は2つ以上の運動センサを有し、前記運動センサは、前記サイクルP内における各所望の時点Tjの時間的相対位置を表わす出力信号を発生させて前記3D走査データ発生器を前記サイクルP内における時間的にあらかじめ選択された位置で作動させることができるように構成されており、
仮定的放射線を体積3D走査データ中に差し向け、各放射線に沿う前記3D走査データを統合することにより、各時点tjにおいて前記3D走査データからDRRを再構築するよう構成されたDRR発生器を有し、
前記運動中の幾何学的領域について前記サイクルP内における時間的相対位置の関数として治療計画を生じさせるよう構成された4D治療計画立案プロセッサを有し、前記標的と前記基準構造との相対位置は、時間につれて周期的に変化し、前記治療計画は、前記解剖学的領域が前記周期運動を行なっているとき、前記運動中の標的に投与されるべき治療用放射線の所望の放射線量分布を表わし、
前記4D治療計画立案プロセッサは、各時点Tjにおいて前記DRRの受け取りに応答して、Tj-1で生じた前記DRRと比較して、Tjで生じた前記DRRに示すように前記解剖学的領域の非剛体変形を表わすパラメータPj発生させると共に前記サイクルP内における前記時点Tjの時間的相対位置の関数としてこれらパラメータPjを数学的モデルで説明するよう構成され、
前記運動中の解剖学的領域内の前記標的及び前記基準構造の近リアルタイム2Dx線射影画像を生じさせるよう構成されたx線画像化システムを有し、
前記近リアルタイムx線射影画像と前記DRRを位置合わせして前記基準構造及び前記標的のうちの少なくとも一方の前記近リアルタイム存在場所を前記解剖学的領域の前記周期運動全体を通じて突き止めることができるよう構成された画像位置合わせプロセッサを有し、
作動時に、治療効果を前記標的に生じさせるのに十分な強度を有する1本又は2本以上のビームx線を生じさせるよう構成された治療ビーム発生器を有し、
前記解剖学的領域の外面の少なくとも一部に取り付けられた1つ又は2つ以上の表面マーカを有し、前記表面マーカは、前記解剖学的領域の周期運動を検出すると共に前記期間P内における1つ又は2つ以上の所望の時点の前記相対位置時間を表わす出力信号を発生させるように構成されており、
前記治療ビーム発生器に結合されていて、前記4D治療計画立案プロセッサ、前記画像位置合わせプロセッサ、及び前記表面マーカの出力に応答するコントローラを有し、前記コントローラは、前記解剖学的領域が前記周期運動を行なっている間、前記所望の放射線量分布に従って治療用放射線の1本又は2本以上のビームを前記運動中の標的に投与するよう前記治療ビーム発生器を作動させるよう構成されている、装置。
【請求項49】
前記運動中の解剖学的領域内の前記基準構造に対する前記標的の前記存在場所をリアルタイムで突き止める前記ステップは、
前記標的の3D運動を前記サイクルP内における時間的相対位置の関数として前記基準構造の3D運動と相関させ、前記サイクルP内における前記解剖学的領域の非剛体変形を計算に入れた4D数学的モデルを構築するステップと、
前記解剖学的領域の前記運動を動的に追跡して前記サイクルP内における1又は2以上の時点の相対位置をリアルタイムで突き止めることができるようにするステップと、
前記基準構造の1又は2以上の近リアルタイム画像と前記基準構造の1又は2以上の術前画像を位置合わせして前記基準構造の存在場所を近リアルタイムで導くステップと、
前記基準構造の前記近リアルタイム存在場所、前記4D数学的モデル、及び前記サイクルP内における前記時点の前記相対位置を用いて前記標的の存在場所をリアルタイムでコンピュータ処理するステップとを含む、請求項1記載の方法。
【請求項50】
前記運動中の解剖学的領域の前記変形は、非剛体変形及び剛体変形のうちの一方である、請求項1記載の方法。
【請求項51】
前記解剖学的領域の前記周期運動を動的に追跡する前記ステップは、
追跡装置を前記解剖学的領域の表面の少なくとも一部に取り付けるステップと、
前記追跡装置をリアルタイムでモニタして前記サイクルPを測定し、前記サイクルP内における時間的位置の関数として前記解剖学的領域の表面の前記一部の存在場所及び向きの変化を突き止めるステップとを含む、請求項3記載の方法。
【請求項52】
前記追跡装置は、
レーザスキャナ、
ビデオシステム、
超音波スキャナ、及び
心電図
のうち少なくとも1つである、請求項51記載の方法。
【図1】

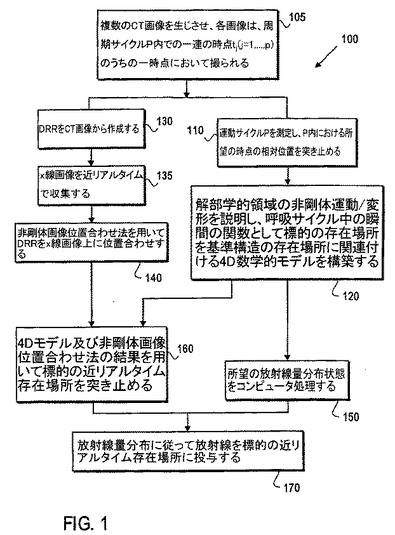
【図2】
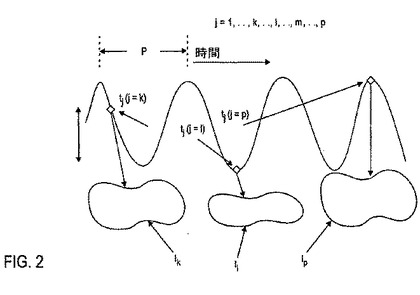
【図3】
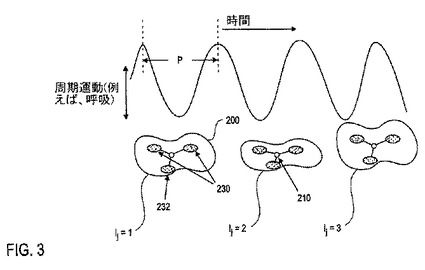
【図4】
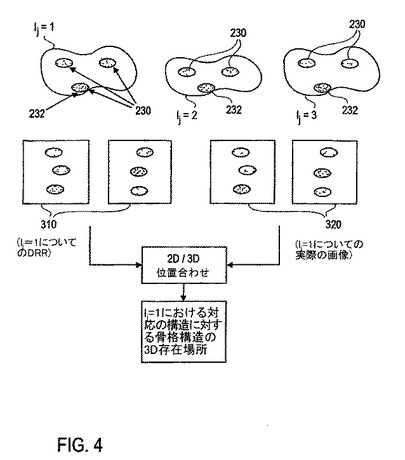
【図5】
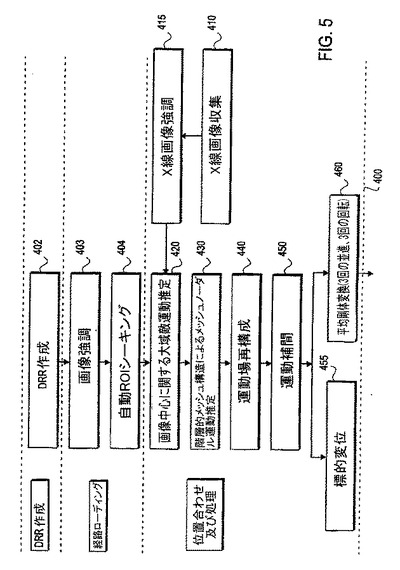
【図6】
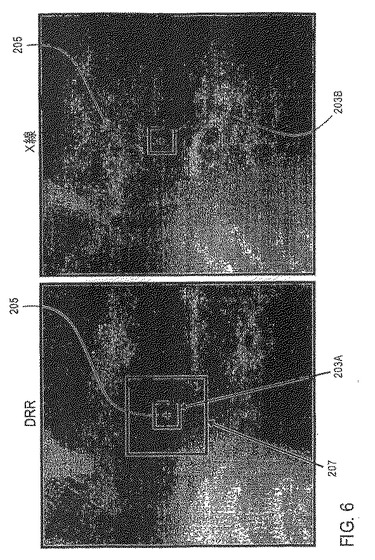
【図7】
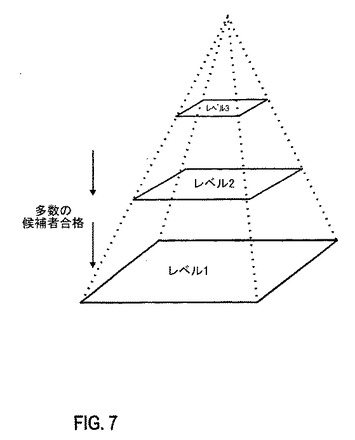
【図8】
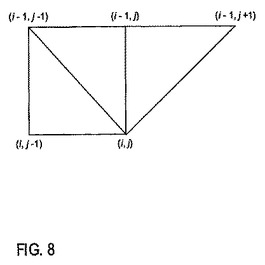
【図9】
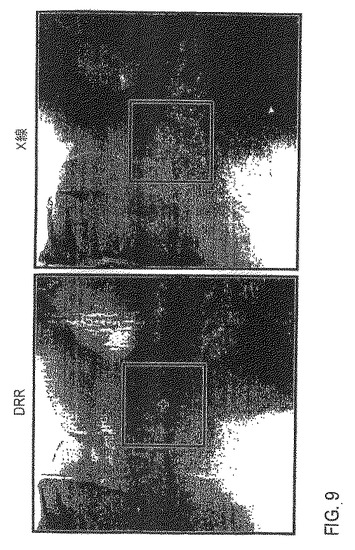
【図10】
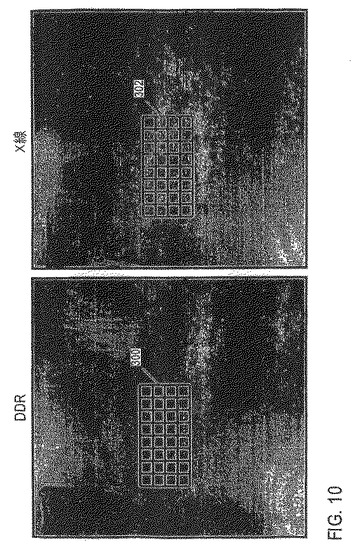
【図11】
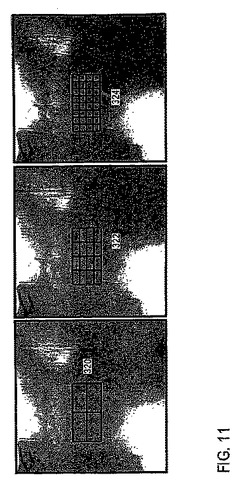
【図12】
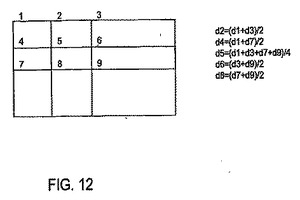
【図13】
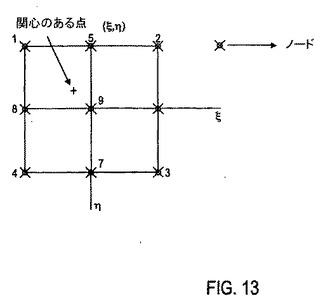
【図14】
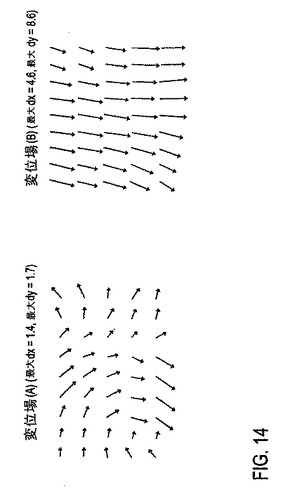
【図15】
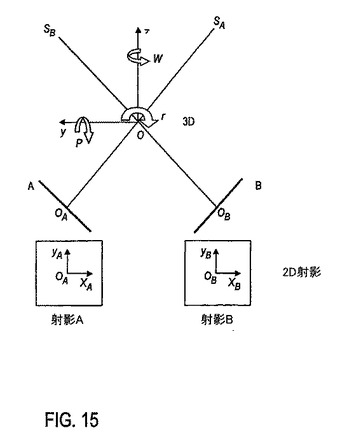
【図16】
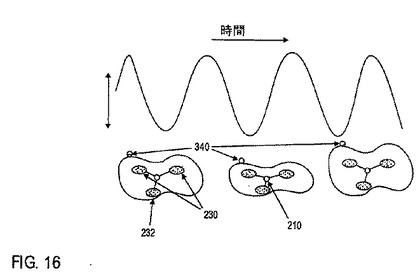
【図17】
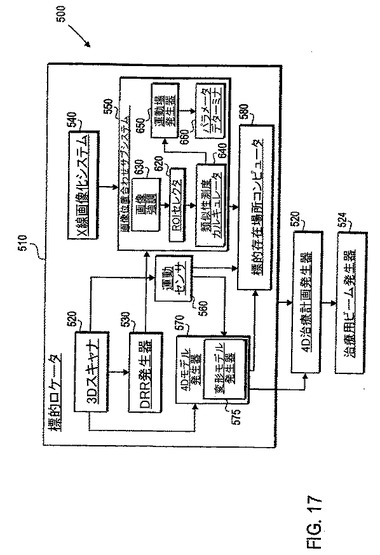
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公表番号】特表2008−514352(P2008−514352A)
【公表日】平成20年5月8日(2008.5.8)
【国際特許分類】
【出願番号】特願2007−534595(P2007−534595)
【出願日】平成17年8月22日(2005.8.22)
【国際出願番号】PCT/US2005/030081
【国際公開番号】WO2006/039009
【国際公開日】平成18年4月13日(2006.4.13)
【出願人】(505172824)アキュレイ インコーポレイテッド (13)
【Fターム(参考)】
【公表日】平成20年5月8日(2008.5.8)
【国際特許分類】
【出願日】平成17年8月22日(2005.8.22)
【国際出願番号】PCT/US2005/030081
【国際公開番号】WO2006/039009
【国際公開日】平成18年4月13日(2006.4.13)
【出願人】(505172824)アキュレイ インコーポレイテッド (13)
【Fターム(参考)】
[ Back to top ]