
運動対象輪郭抽出装置、左心室画像分離装置、運動対象輪郭抽出方法及び左心室画像分離方法
【課題】運動段階が異なる各画像内の運動対象の輪郭を正確に取得すること。
【解決手段】実施形態の運動対象輪郭抽出装置は、輪郭取得部と、輪郭補正部とを備える。輪郭取得部は、各画像スライス内の運動対象の輪郭を取得する。輪郭補正部は、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
【解決手段】実施形態の運動対象輪郭抽出装置は、輪郭取得部と、輪郭補正部とを備える。輪郭取得部は、各画像スライス内の運動対象の輪郭を取得する。輪郭補正部は、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、運動対象輪郭抽出装置、左心室画像分離装置、運動対象輪郭抽出方法及び左心室画像分離方法に関する。
【背景技術】
【0002】
運動対象、特に、変形運動を行なう運動対象の輪郭抽出は、コンピュータビジョン(computer vision)分野における重要な研究課題の1つである。実際の適用において、例えば、医用分野では、コンピュータ断層撮影(CT:Computed Tomography)装置、磁気共鳴イメージング(MRI:Magnetic Resonance Imaging)装置、超音波(UL:Ultrasound)診断装置等の医用画像診断装置により取得された時系列3次元画像から、構造物、或いは、構造物の一部分の輪郭を抽出することは、当該構造物に関する各種パラメータに対する計測のために大変有用である。しかし、対象の変形運動により画像内の対象の方向、サイズ及び形状は、全て時間に伴って大きく変化し、画像強度も大きく変化する。このため、運動段階が異なる各画像内の対象の輪郭を正確に抽出することは、困難である。
【0003】
また、心臓病学分野においては、通常、核磁気共鳴イメージング技術による心臓の時系列3次元画像(3D+T)が用いられている。医師は、心室や心内膜、心外膜の識別に関心を寄せている。識別された心室や、心内膜、心外膜の輪郭は、異なる心周期での心室血容量(駆出率、EF:Ejection Fraction)、心室壁の運動、壁厚特性等のパラメータの計測に用いることができる。その中でも左心室(LV:Left Ventricle)は、酸素化された血液を心臓から全身の各臓器組織へ送り出す役割を担うことから、特に重要である。
【0004】
従来、4次元(4D)の心臓確率地図や3次元(3D)の左心室表面モデルのように、左心室分離を支援するためのモデルを構築する研究が行なわれている。その他の方法としては、勾配(gradient)、強度及び形状特徴による「Active Shape」を用いた左心室分離方法が研究されている。また、ユーザ対話(interaction)を利用した半自動左心室分離方法も多く利用されている。近年、ますます多くの研究者が完全自動化による左心室分離方法の研究を始めており、一定の成果を上げている。
【0005】
従来のモデルに基づく方法では、予測される以外の変化を捉えることが困難である。一般的に用いられる動的輪郭モデル(ACM:Active Contour Model、Snake)アルゴリズムは、ノイズと物理的な左心室の乳頭筋とに対して非常に影響を受けやすく、更に、初期条件に対しても影響を受けることがある。半自動化方法の多くは、主観的なユーザ対話が必要であり、且つ、操作者(医者)に時間を浪費させてしまう。更に、自動化方法の幾つかは、心臓の形状や心臓の画素輝度等に関して多くの仮定の下に成り立つ方法であって、改善が必要である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願公開第2009/0232371号公報
【特許文献2】米国特許出願公開第2009/0290777号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、運動段階が異なる各画像内の運動対象の輪郭を正確に取得することができる、運動対象輪郭抽出装置、左心室画像分離装置、運動対象輪郭抽出方法及び左心室画像分離方法を提供することである。
【課題を解決するための手段】
【0008】
実施形態の運動対象輪郭抽出装置は、時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する。前記時系列3次元画像は、複数の時点で取得された複数の3次元画像を含む。また、前記時系列3次元画像では、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している。そして、実施形態の運動対象輪郭抽出装置は、輪郭取得部と、輪郭補正部とを備える。前記輪郭取得部は、各画像スライス内の前記運動対象の輪郭を取得する。前記輪郭補正部は、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
【図面の簡単な説明】
【0009】
以下の実施形態の説明では、理解を助けるため図面を参考にしながら説明する。図面において、同じ、或いは、類似する技術特徴や各構成については、同じ、或いは、類似する附番や表記を用いて説明する。これらの図面は、以下の詳細な説明も含めて、本実施形態の良好な実施例や本実施形態の原理や優位性についての解説のために、更に例を挙げて説明するためのものである。
【図1】図1は、本実施形態に係る運動対象輪郭抽出方法の一例を示すフローチャートである。
【図2】図2は、本実施形態に係る各画像スライス内の運動対象の輪郭を抽出する方法の一例を示すフローチャートである。
【図3】図3は、所定の時系列画像スライスの運動領域を基準として、他の時系列画像スライスの運動領域を調整する一例を示す図である。
【図4A】図4Aは、時系列画像スライスの運動領域の中から運動対象の候補領域を識別する一例を示す図(1)である。
【図4B】図4Bは、時系列画像スライスの運動領域の中から運動対象の候補領域を識別する一例を示す図(2)である。
【図5】図5は、本実施形態において、運動対象の運動傾向情報に基づいて運動対象の輪郭を補正する一例を示すフローチャートである。
【図6】図6は、運動対象の複数の時系列画像スライスそれぞれにおける運動対象の運動傾向と基準運動傾向との類似度の一例を示す図である。
【図7】図7は、1つの時系列画像スライスにおける運動対象の輪郭補正の一例を示す図である。
【図8】図8は、本実施形態に係る左心室画像分離方法の一例を示すフローチャートである。
【図9】図9は、ユークリッド座標系と極座標系との変換関係の一例を示す図である。
【図10A】図10Aは、左心室の初期輪郭を極座標系に変換する一例を示す図(1)である。
【図10B】図10Bは、左心室の初期輪郭を極座標系に変換する一例を示す図(2)である。
【図11】図11は、極座標系における画像スライスのグレイスケール画像の周方向への投影の一例を示す図である。
【図12A】図12Aは、極座標系における画像スライスのエッジ画像を示す図である。
【図12B】図12Bは、図12Aにおけるエッジ画像の周方向への投影を示す図である。
【図13A】図13Aは、極座標系において取得された心内膜輪郭及び心外膜輪郭を示す図である。
【図13B】図13Bは、図13Aで取得された心内膜輪郭及び心外膜輪郭を元の画像スライス上へ変換した図である。
【図14】図14は、本実施形態に係る運動対象輪郭抽出装置の一例を示すブロック図である。
【図15】図15は、本実施形態に係る輪郭取得部の一例を示すブロック図である。
【図16】図16は、本実施形態に係る輪郭取得部の他の一例を示すブロック図である。
【図17】図17は、本実施形態に係る輪郭補正部の一例を示すブロック図である。
【図18】図18は、本実施形態に係る左心室画像分離装置の一例を示すブロック図である。
【図19】図19は、本実施形態に係る極点取得部の一例を示すブロック図である。
【図20】図20は、本実施形態に係る左心室画像分離装置の他の一例を示すブロック図である。
【図21】図21は、本実施形態に係る左心室画像分離装置の更に他の一例を示すブロック図である。
【図22】図22は、本実施形態に係る方法/装置を実現するためのコンピュータの構成例を示すブロック図である。
【発明を実施するための形態】
【0010】
以下において、本実施形態の基本的理解のために、その一例の概要について説明する。ただし、この概要は、本実施形態のキーワードや重要な部分を確定するものではなく、本実施形態の範囲を限定するものでもない。その目的は、単に、本実施形態の概念を簡潔に説明するためのものであり、その後に論述する更に詳細な説明の序章にすぎない。
【0011】
本実施形態の目的は、運動段階が異なる各画像内の運動対象の輪郭を正確に取得する運動対象輪郭抽出方法及び装置を提供することである。本実施形態の他の目的は、正確かつ確実に画像から左心室を分離する左心室画像分離方法及び装置を提供することである。
【0012】
本実施形態に係る運動対象輪郭抽出方法は、複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する方法である。前記運動対象輪郭抽出方法は、各画像スライス内の前記運動対象の輪郭を取得する。そして、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
【0013】
本実施形態に係る運動対象輪郭抽出装置は、複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する装置である。前記運動対象輪郭抽出装置は、各画像スライス内の前記運動対象の輪郭を取得する輪郭取得部と、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する輪郭補正部とを備える。
【0014】
本実施形態に係る左心室画像分離方法は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する方法である。前記左心室画像分離方法は、極座標変換のために、各画像スライス内の極点を取得し、各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換し、前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得する。そして、前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付ける。
【0015】
本実施形態に係る左心室画像分離装置は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する装置である。前記左心室画像分離装置は、極座標変換のために、各画像スライス内の極点を取得する極点取得部と、各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換する座標変換部と、前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得する心内膜輪郭取得部とを備える。そして、前記座標変換部は、前記心内膜輪郭取得部が前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付ける。
【0016】
また、本実施形態は、更に上述方法を実現するためのコンピュータプログラムを提供する。
【0017】
更に、本実施形態は、少なくともコンピュータ読み取り可能な媒体形式のコンピュータプログラムプロダクトを提供し、その上、上述方法を実現するためのコンピュータプログラムコードを提供する。
【0018】
(実施形態)
以下、本実施形態について図面を参照しながら説明する。本実施形態の1つの図面や1つの実施例において説明される構成や特徴は、1つ又は複数の他の図面や1つ又は複数の他の実施例における構成や特徴と組み合わせることが可能である。なお、説明をわかりやすくするために、図面と説明とにおいて本実施形態と関係の無い内容や、当業者にとって既知の構成や処理に関する表示や説明については省略する。
【0019】
以下、本実施形態について「1.運動対象輪郭抽出方法」、「2.左心室画像分離方法」、「3.運動対象輪郭抽出装置」、「4.左心室画像分離装置」、「5.本実施形態に係る方法/装置を実施可能なコンピュータ構成」の順番で説明する。
【0020】
(1.運動対象輪郭抽出方法)
まず、図1〜図7を用いて、本実施形態に係る運動対象輪郭抽出方法について説明する。本実施形態に係る運動対象輪郭抽出方法は、時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する。時系列3次元画像それぞれは、複数の時点で取得された複数の3次元画像を含む。そして、各3次元画像が互いに平行な複数の2次元の画像スライスで構成される。そして、複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。ここで、本実施形態に係る運動対象輪郭抽出方法は、各種の時系列3次元画像から運動対象の輪郭を抽出する。一例として、時系列3次元画像は、医用画像診断装置により取得された被検体のデータに基づいて生成された時系列医用画像であるが、これに限定されるものではない。ここで述べる医用画像診断装置は、X線診断(XR)装置、超音波診断(UL)装置、コンピュータ断層診断(CT)装置、磁気共鳴診断(MRI)装置、ポジトロン断層撮影(PET)装置等を含むが、これに限定されるものではない。
【0021】
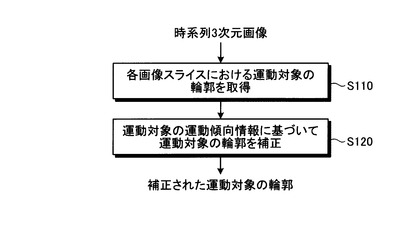
図1は、本実施形態に係る運動対象輪郭抽出方法の一例を示すフローチャートである。本実施形態では、運動対象の変形が有利要素へ転換され、運動対象の運動傾向を利用して運動対象の輪郭が補正される。
【0022】
図1に示すように、ステップS110において、各画像スライスにおける運動対象の輪郭を取得する。ここで、運動対象の輪郭は、各種既知の方法により取得される。例えば、運動対象の輪郭は、マニュアルラベリング(Manual Labeling)により取得される。また、他の一例として、既知の対象検出方法により、各画像スライスの中から運動対象の候補領域を検出し、この運動対象の候補領域の輪郭を抽出して、運動対象の輪郭としても良い。本開示で提案する好適な方法として、本実施形態に係る運動対象輪郭抽出方法の一例について、図2〜図4の組み合わせを参照しながら、以下、説明する。
【0023】
運動対象の輪郭を抽出した後、ステップS120において、運動対象の運動傾向情報に基づいて運動対象の輪郭を補正する。運動対象は、全体であり、運動対象の各部分の変形運動は、通常、統一的であることから、変形運動の傾向は、一貫性を有する。
互いに平行な運動対象の複数のスライス面を参照すると、運動対象の各スライス面の運動は、互いに相関性を有する。従って、各時系列画像スライスにおいて、運動対象の運動傾向は、一致するはずである。そして、各時系列画像スライスにおいて、運動対象の輪郭の変化傾向も、一致するはずである。1つの時系列画像スライスにおける運動対象の運動傾向と、大部分の時系列画像スライスにおける運動対象の運動傾向、又は、基準運動傾向とが一致しない場合、この時系列画像スライスにおいて取得された輪郭は、間違いであると判断することができ、この場合は補正が必要となる。かかる補正により、補正後の時系列画像スライスにおける運動対象の運動傾向と、大部分の時系列画像スライスにおける運動対象の運動傾向、又は、基準運動傾向とが一致する。当業者は、上述の説明の手引きの下で、各種異なる手段により該補正を実施することができる。本開示で提案する好適な方法として、本実施形態に係る運動対象輪郭抽出方法の一例について、図5〜図7の組み合わせを参照しながら、以下、説明する。
【0024】
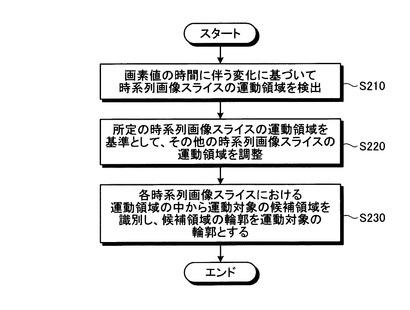
図2は、本実施形態に係る各画像スライス内の運動対象の輪郭を抽出する方法の一例を示すフローチャートである。
【0025】
ステップS210において、各時系列画像スライスにおける運動領域を、当該時系列画像スライスにおける画素値の時間に伴う変化に基づいて検出する。1つの時系列画像スライスに対して、運動領域における各画素値は、時間に沿って顕著な変化を呈する。このステップの方法を実現する従来の方法は数多くあり、例えば、タイムドメイン分散法、フレーム間差分法等を採用することができ、ここでは具体的に記載しない。
【0026】
ステップS220において、時系列3次元画像における所定の時系列画像スライスの運動領域を基準として、時系列3次元画像におけるその他の時系列画像スライスの運動領域を調整する。実際の応用場面では、通常、運動対象が受ける干渉が最小となる1つの時系列画像スライスを、上述の所定の時系列画像スライスとして採用することができる。例えば、所定の時系列画像スライスは、手動により指定されたり、或いは、経験に基づくある位置で、予め決定されたりする。
【0027】
図3は、所定の時系列画像スライスの運動領域を基準として、他の時系列画像スライスの運動領域を調整する一例を示す図である。この例では、MRI装置により心臓の短軸方向(すなわち、心臓の長軸方向に直交する方向である。一般的には、心臓の長軸方向と交わる方向とされても良い)において取得された時系列3次元画像を示している。ステップS210の運動領域検出では、1つの時系列画像スライスが、通常、1つの運動領域に対応する、すなわち、同じ時系列画像スライスにおける各画像スライスが、同じ運動領域を有することとなる。簡潔に説明するため、図3における各画像スライスは、それぞれが1つの時系列画像スライスから選択された画像スライスである。図3に例示する運動対象は、心臓の左心室であり、図3に例示する複数の画像スライスそれぞれは、心臓拡張期にそれぞれ取得された時系列画像スライスにおける画像スライスである。図3において、最上端の画像スライスは、心基部の画像スライスであり、最下端の画像スライスは、心尖部の画像スライスであり、最上端と最下端との間の画像スライスは、心基部から心尖部の間の部分で順次取得された画像スライスである。なお、運動対象輪郭抽出方法及び装置を説明するために、心臓画像を例とするが、これに限定されるものではない。本実施形態は、それ以外の対象についても同様に適用することができる。
【0028】
図3に示す一例では、最上端の心基部の時系列画像スライスの運動領域を基準にして、残りの時系列画像スライスの運動領域を調整する。図3では、残りの時系列画像スライスにおける実線の枠は、調整後の運動領域を表す。図3に示す最下端の心尖部の画像スライスにおける破線の枠は、調整前の運動領域を表す(残りの画像スライスにおける調整前の運動領域は、図示せず)。
【0029】
心臓の短軸方向で取得された複数の画像スライスの左心室において、主な干渉源は、心臓周囲の大血管である。大血管の形状は左心室の形状と類似し、かつ、動的である。心尖の運動量は比較的小さいので、心尖部は、大血管運動の影響を更に受けやすい。このことから、図3に示す一例においては、受ける干渉が最小の心基部の時系列画像スライスを、所定の時系列画像スライスとし、心基部の時系列画像スライスの運動領域に基づいて、その他の時系列画像スライスの運動領域を調整する。これにより、その他の時系列画像スライスにおいて、大血管による干渉を除去することができる。
【0030】
図2に戻って、ステップS230において、各時系列画像スライスにおける運動領域の中から前記運動対象の候補領域を識別し、当該候補領域の輪郭を運動対象の輪郭とする。各画像スライス内の運動対象の候補領域は、各時系列画像スライスの運動領域から、多種類特徴識別法(multiple-feature recognition method)のように、既知のオブジェクト検出法を用いて検出することができる。
【0031】
図4A及び図4Bは、時系列画像スライスの運動領域の中から運動対象の候補領域を識別する一例を示す図である。図4Aは、MRI装置により取得された時系列3次元画像の心臓の短軸方向における画像スライスが2値化されて連結された領域を標識した運動領域を示している。図4Aに示すように、比較的大きな2つの連結領域それぞれは、左心室の候補領域及び右心室の候補領域である。図4Bは、左心室の運動領域の2値化画像であり、この2値化画像内の連結領域は、識別された左心室の候補領域である。図4Bにおいて識別された左心室の候補領域の輪郭は、左心室の輪郭とすることができる。
【0032】
この他、本実施形態の一例では、各時系列画像スライスの前記運動領域から抽出される特徴に基づいて、所定の時系列画像スライスを決定する。例として、かかる特徴は、平均画素値、前記運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び前記運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つとすることができる。
【0033】
具体的な実行例として、機械学習(Machine learning)により上記の所定の時系列画像スライスを決定できる。例えば、サポートベクターマシン(SVM:Support Vector Machine)分類器や、その他の適切な分類器により、所定の時系列画像スライスを決定できる。一態様として、時系列3次元画像における各時系列画像スライスの個々の画像スライスの運動領域から抽出された上記の特徴からなるサンプルバンク(sample bank)により分類器を学習する。そして、学習された分類器により、時系列3次元画像から所定の時系列画像スライスを決定する。上記特徴を採用した分類方法により、時系列3次元画像における所定の時系列画像スライスを正確に探し出すことができる。
【0034】
本実施形態では、1つの時系列3次元画像において、運動対象の本当の範囲外となる時系列画像スライスが存在する場合がある。これらの時系列画像スライスから抽出された運動対象の輪郭は、誤りであり、これが採用された後段の処理で、運動対象の輪郭を利用して運動対象に関するパラメータを算出すると、正確性に影響を及ぼす。
【0035】
本実施形態の一例において、運動対象の輪郭を取得する前に、このような時系列画像スライスを探し出し、これらから抽出した運動対象の輪郭は誤りであると決定する、或いは、直接これらを除去とすることで、後段でのパラメータ算出の正確性に及ぼす影響を回避することができる。本実施形態では、各時系列画像スライスの運動領域を検出した後、そして、所定の時系列画像スライスの運動領域を基準として、他の時系列画像スライスの運動領域を調整する前に、運動対象の両端に対応する2つの時系列画像スライスを、各時系列画像スライスの前記運動領域から抽出される以下の特徴の少なくとも1つの特徴を用いて決定する。かかる特徴は、例えば、平均画素値、運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率である。
【0036】
運動対象の両端に対応する2つの時系列画像スライスを決定した後、各画像スライス内の輪郭を抽出した場合、これら2つの時系列画像スライスの間に位置する時系列画像スライスの各画像スライス内の運動対象の輪郭を取得するのみとなる。これら2つの時系列画像スライスは、時系列3次元画像から除去される。
【0037】
同様に、機械学習(Machine learning)により上記の両端に対応する2つの時系列画像スライスを決定できる。例えば、サポートベクターマシン(SVM:Support Vector Machine)分類器や、その他の適切な分類器により、所定の時系列画像スライスを決定できる。一態様として、時系列3次元画像における各時系列画像スライスの個々の画像スライスの運動領域から抽出された上記の特徴からなるサンプルバンク(sample bank)により分類器を学習する。そして、学習された分類器により、時系列3次元画像から両端に対応する2つの時系列画像スライスを決定する。上記特徴を採用した分類方法により、時系列3次元画像における両端に対応する2つの時系列画像スライスを正確に探し出すことができる。
【0038】
MRI装置により取得した心臓短軸方向の時系列3次元画像において、左心室が運動対象の場合、上記の運動対象の両端に対応する2つの時系列画像スライスそれぞれは、心基部の時系列画像スライスと、心尖部の時系列画像スライスとなる。
【0039】
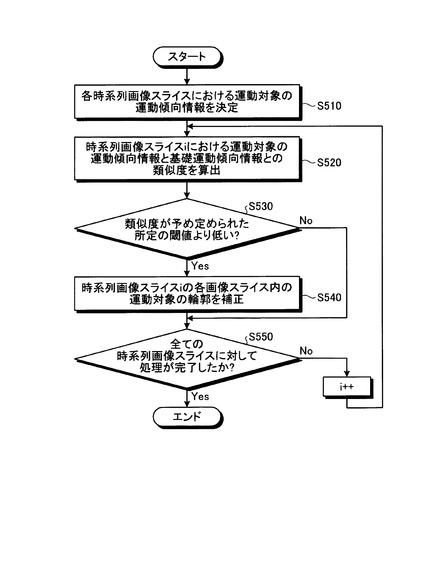
図5は、本実施形態において、運動対象の運動傾向情報に基づいて運動対象の輪郭を補正する一例を示すフローチャートである。
【0040】
ステップS510において、各時系列画像スライスにおける運動対象の運動傾向情報を決定する。運動対象の輪郭が変化する傾向は、運動対象の運動傾向運動を表すために用いることができる。例えば、運動対象の運動傾向情報を表すものとして、運動対象の輪郭の半径の時間に伴う変化、運動対象の輪郭の周囲長の半径の時間に伴う変化、運動対象の輪郭で囲まれる面積の半径の時間に伴う変化の少なくとも1つを用いることができる。
【0041】
ステップS520において、各時系列画像スライス(時系列画像スライスi)における運動対象の運動傾向情報と、運動対象の基準運動傾向情報との類似度を算出する。ここで、運動対象の基準運動傾向情報は、予め決定されたものとされる。一例として、運動対象の基準運動傾向情報は、複数の時系列画像スライスにおける運動対象の平均運動傾向情報、又は、テンプレートとして予め決定された時系列画像スライスにおける運動対象の運動傾向情報とされるが、これに限定されるものではない。
【0042】
類似度は、既知の適切な類似度算出法におり算出される。一例として、類似度は、正規化相関(NCC:Normalized Cross Correlation)法を用いて算出されるが、これに限定されるものではない。理解のために、以下のNCC法の式(1)を用いるとする。なお、この式に対して、各種の数学的変形を行なっても良い。
【0043】
【数1】

【0044】
ここで、「i」は、時系列3次元画像において、類似度の算出対象となる時系列画像スライスの索引を示す。「t」は、時系列3次元画像において、予めテンプレートとして決定された時系列画像スライスの索引を示す。「N」は、1つの時系列画像スライスの位相数を示す。すなわち、「N」は、1つの時系列画像スライスにおける画像スライスそれぞれが取得された時点の数であり、この時系列画像スライスにおける画像スライスの数に等しい。「Ii,n」は、第i番目の時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)を示す。「上にバーが付与されたIi」は、第i番目の時系列画像スライスにおける全ての画像スライス内の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。「ρ(i,t)」は、第i番目の時系列画像スライスにおける運動対象の運動傾向情報と、予めテンプレートとして決定された時系列画像スライスtにおける運動対象の運動傾向情報(基準運動傾向情報)との類似度を示す。
【0045】
運動対象の基準運動傾向情報が、テンプレートとして予め決定された時系列画像スライスにおける運動対象の運動傾向情報である場合、「It,n」は、テンプレートとして予め決定された時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)を示す。また、「上にバーが付与されたIt」は、テンプレートとして予め決定された時系列画像スライスにおける全ての画像スライス内の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。
【0046】
運動対象の基準運動傾向情報が、全ての時系列画像スライスにおける運動対象の平均運動傾向情報である場合、「It,n」は、各時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。また、「上にバーが付与されたIt」は、各時系列画像スライスにおける全ての画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。
【0047】
なお、運動対象の基準運動傾向情報が、各時系列画像スライスにおける運動対象の運動傾向情報の平均値である場合、先ず、各時系列画像スライスにおける運動対象の該時系列画像スライスにおける複数の画像スライスの中の特徴値(面積、周囲長、或いは、半径等)を正規化し、その後、「It,n」及び「上にバーが付与されたIt」を、上記で説明した内容により算出することが好適である。すなわち、「It,n」は、各時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の正規化面積(或いは、周囲長、半径等のその他の特徴を正規化した値)を示すこととなる。また、「上にバーが付与されたIt」は、各時系列画像スライスにおける全ての画像スライスの中の運動対象の正規化面積(或いは、周囲長、半径等のその他の特徴を正規化した値)を示すこととなる。
【0048】
ステップS530において、時系列画像スライスiにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、所定の閾値より低い否かを判断する。時系列画像スライスiにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、所定の閾値より低い場合、該時系列画像スライスにおいて取得された輪郭が誤りであり補正が必要であるので、ステップS540に進む。低くないのであれは、ステップS550に進む。
【0049】
ステップS540において、時系列画像スライスiの各画像スライス内の運動対象の輪郭を補正する。本実施形態では、一例として、時系列画像スライスiに隣接する時系列画像スライスの各画像スライス内の運動対象の輪郭を用いて、時系列画像スライスiの各画像スライス内の運動対象の輪郭を補正する。
【0050】
なお、更に、補正後の時系列画像スライスiにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、引き続き、所定の閾値より低い場合、補正後の時系列画像スライスiにおける輪郭は依然として誤りが存在するので、時系列画像スライスiを時系列3次元画像から除いても良い。これにより、後段の処理に対して悪影響を与えることを回避できる。
【0051】
ステップS550において、全ての時系列画像スライスに対して上記の処理が完了したか否かを判断する。もし、全ての時系列画像スライスに対する処理が完了したと判断された場合、一連のプロセスは終了する。もし、まだ完了していない場合は、iをインクリメントして、ステップS520まで戻り、引き続き、時系列3次元画像における次の時系列画像スライスに対して、類似度を算出する。
【0052】
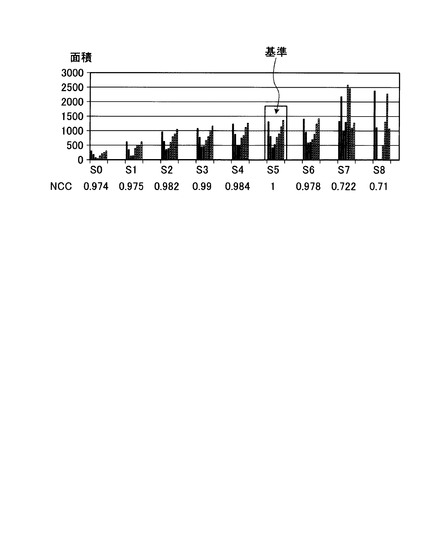
図6は、運動対象の複数の時系列画像スライスそれぞれにおける運動対象の運動傾向と基準運動傾向との類似度の一例を示す図である。図6に示す一例においては、運動対象の輪郭の面積の変化傾向を運動対象の運動傾向としている。横座標の「S0、S1、...、S8」は、時系列画像スライスそれぞれの空間位置を示す符号である。縦座標は、運動対象の輪郭の面積を示す。同じ符号における1つの時系列画像スライスでの複数の縦線それぞれは、該時系列画像スライスにおける複数の画像スライス内の運動対象の輪郭の面積を示す。これらの縦線の変化傾向は、該時系列画像スライスにおける運動対象の運動傾向を反映している。図6に示す一例においては、時系列画像スライスS5における運動傾向を基準運動傾向としている。ここで、横座標の下の一行では、NCC法を用いて算出された各時系列画像スライスにおける運動対象の運動傾向と基準運動傾向との類似度を示している。図6に例示するように、時系列画像スライスS7及びS8における運動傾向は、基準運動傾向と明らかに異なる。これにより、S7とS8とで算出された類似度も低くなる。
【0053】
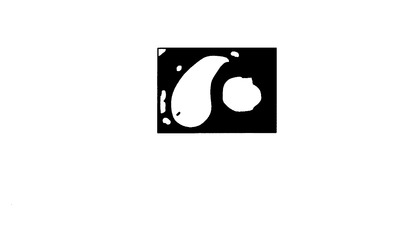
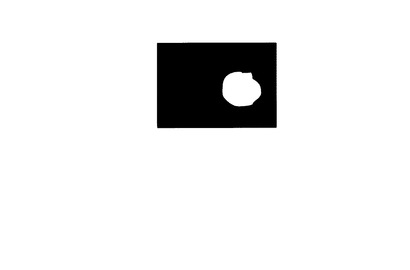
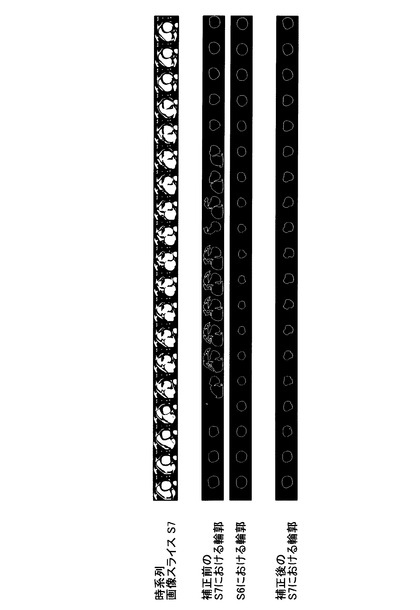
図7は、1つの時系列画像スライスにおける運動対象の輪郭補正の一例を示す図である。図7に例示する時系列画像スライスS7は、MRI装置により取得した心臓短軸方向の時系列3次元画像の1つの時系列画像スライスである。図7では、左心室が運動対象である。図7における2行目の2値化画像は、時系列画像スライスS7における補正前の左心室の輪郭を示している。これに示されるように、補正前では、時系列画像スライスS7における幾つかの画像スライス内の左心室の輪郭は、実際の左心室の輪郭と大きく異なる。上記の類似度計算により、時系列画像スライスS7における左心室の輪郭を補正する必要があると決定できる。図7における3行目の2値化画像は、時系列画像スライスS6における補正無しの左心室の輪郭を示している。時系列画像スライスS6は、時系列画像スライスS7に隣接する時系列画像スライスである。時系列画像スライスS7における輪郭は、時系列画像スライスS6における輪郭に基づいて補正され、その結果、図7における4行目の2値化画像に示すように、時系列画像スライスS7における補正された輪郭が得られる。補正により、時系列画像スライスS7における左心室の輪郭は、実際の左心室の輪郭に近づく。
【0054】
(2.左心室画像分離方法)
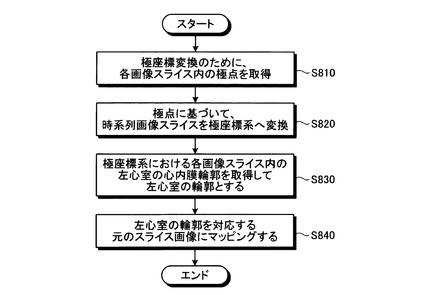
以下、本実施形態に係る左心室画像分離方法について、図8〜図13を用いて説明する。本実施形態に係る左心室画像分離方法は、時系列3次元医用画像から左心室の輪郭を取得する。通常、左心室の輪郭は、左心室の心内膜輪郭となる。好適には、本実施形態に係る左心室画像分離方法は、更に、左心室の心外膜輪郭を抽出し、抽出した心内膜輪郭と組み合わせて、心筋層を決定することができる。上記の時系列3次元医用画像は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む。各3次元画像は、左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成される。複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。
【0055】
図8は、本実施形態に係る左心室画像分離方法の一例を示すフローチャートである。本実施形態において、左心室の心内膜輪郭と心外膜輪郭とは、共に曲線であり、且つ、心内膜輪郭は、乳頭筋の影響を受けやすく、心外膜の輪郭は、比較的ぼやけているので、より正確に画像スライスから心内膜輪郭と心外膜輪郭とを抽出するために、元の画像スライスを極座標系へ変換する。
【0056】
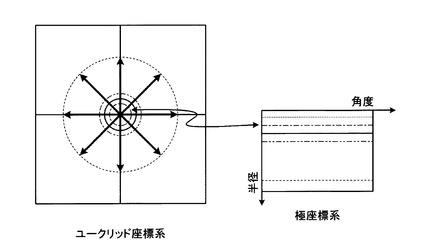
図9は、ユークリッド座標系と極座標系との変換関係の一例を示す図である。同図において、ユークリッド座標系における原点は、極座標系の極点に対応する。極座標系における横座標は、ユークリッド座標系における点と原点とをつなぐ線の横軸正方向に対する角度を示す。また、極座標系における縦座標は、ユークリッド座標系における点と原点との距離を示す。ユークリッド座標系における半径の異なる複数の円は、極座標系へ変換された後は、異なる高さの直線となる。一方、極座標系における高さの異なる複数の直線は、ユークリッド座標系に変換された後は、半径の異なる複数の円となる。
【0057】
図8に戻って、ステップS810において、極座標変換のために、各画像スライス内の極点を取得する。かかる極点は、通常、画像スライスにおける左心室の輪郭の中心である。かかる極点は、手動でマークされても良いし、適切な従来技術により確定されても良い。本実施形態の一例では、上記の実施形態で説明した運動対象輪郭抽出方法を用いて、時系列3次元医用画像から、運動対象である左心室の輪郭を、左心室の初期輪郭として抽出する。そして、各画像スライス内の左心室の初期輪郭の中心を、当該画像スライスの極点として確定する。
【0058】
ステップS820において、各画像スライス内の極点に基づいて当該画像スライスを極座標系へ変換する。すなわち、ステップS820において、極点に基づいて、時系列画像スライスを極座標系へ変換する。実際の応用場面においては、演算量を減らすために、画像スライス全体を極座標系へ変換するのではなく、画像スライスにおける運動領域の部分だけを極座標系へ変換する。
【0059】
ステップS830において、極座標系における各画像スライス内の心内膜輪郭を取得して左心室の輪郭とする。極座標系への変換は、心内膜輪郭と心外膜輪郭の検出を容易かつ正確にさせる。極座標系において、心内膜の輪郭は直線に近づき、心外膜の輪郭の抽出も容易になる。更に、極座標系において、周方向(水平方向、横軸方向)へ投影した多くの情報(例えば、輝度(通常は画素値により表す)とエッジ等)を用いることができる。
【0060】
ステップS840において、極座標系において取得した左心室の輪郭を対応する元の画像スライスに位置付ける(マッピングする)。左心室において、乳頭筋の影響により、一般に常用されている方法により得られた心内膜の輪郭は小さくなる。従って、乳頭筋の影響を除去し、心内膜の輪郭線が限定する範囲内に乳頭筋を含めることは、左心室の心内膜輪郭を取得する際に重要な処理であり、これにより大きく且つ正確な心内膜輪郭を得る。
【0061】
既存の適切な方法により、極座標系において各画像スライス内の左心室の心内膜輪郭を取得することができる。以下、本実施形態において、極座標系における各画像スライス内の左心室の心内膜輪郭を取得する方法について説明する。
【0062】
本実施形態の一例において、上記の運動対象輪郭抽出方法により時系列3次元画像から左心室の輪郭を抽出し、抽出した輪郭を左心室の初期輪郭とし、画像スライスにおける左心室の初期輪郭の中心を当該画像スライスの極点とする場合、各画像スライスにおける左心室の心内膜輪郭は、当該画像スライスの左心室の初期輪郭を用いて取得することができる。具体的には、各画像スライスにおける極点に基づいて各画像スライスにおける左心室の初期輪郭を極座標系へ変換し、その後、極座標系における各画像スライス内の初期輪郭に対して平滑化処理を行なって、当該画像スライス内の心内膜輪郭を取得する。
【0063】
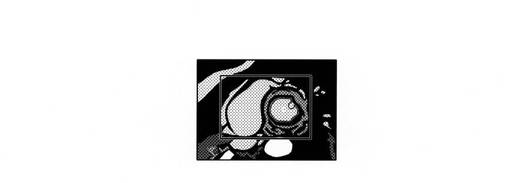
図10A及び図10Bは、左心室の初期輪郭を極座標系に変換する一例を示す図である。図10Aは、元の画像スライス(オリジナル画像スライス)を示す。同図中、略矩形となる実線の枠は運動領域を示し、略円形の線は、左心室の初期輪郭を示す。図10Bは、図10Aの画像スライスにおける初期輪郭の中心点を極点として、当該画像スライス(元の画像スライス)を極座標系へ変換することで得られた画像を示す。図10Aでは略円形である左心室の初期輪郭は、極座標系においては、略直線となる。なお、輪郭線において突起の部分は、乳頭筋がある部分である。本実施形態の一例では、各種の適切な方法により、極座標系において画像スライスの中の初期輪郭に対して平滑化を行い、乳頭筋の影響を除去して、略直線となる心内膜輪郭を得る。
【0064】
本実施形態の他の一例では、画像スライスの周方向への投影(水平投影)により心内膜輪郭の極座標系における大体の位置を確定し、その後、直線検出法により、画像スライスのエッジ画像の中から心内膜輪郭を取得する。具体的には、各画像スライスの中のエッジを検出し、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影(水平投影)を用いて取得する。そして、極座標系において、左心室の心内膜輪郭の半径付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。左心室の元の画像スライスでは、左心室の心筋のグレイスケールは、左心室内部のグレイスケールより小さくなる。これにより、画像スライスのグレイスケール画像の周方向への投影における画素値が急激に低下する位置を、心内膜輪郭の半径の位置とする。
【0065】
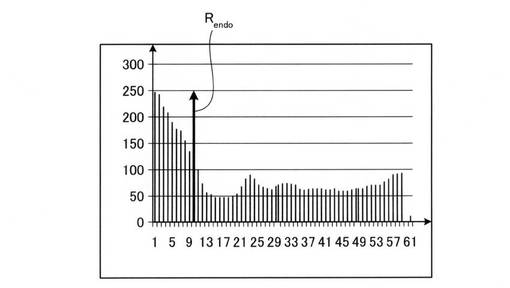
図11は、極座標系における画像スライスのグレイスケール画像の周方向への投影の一例を示す図である。図11において、横座標は、画像スライスのグレイスケール画像における行(row)であり、縦座標は、各行における画素値の和、或いは、各行における画素値の平均値である。精度要求の程度に基づき、1つ、或いは、複数の画素を一単位として、画像スライスは、行に分割される。図11に示すように、画素値の和、或いは、平均値が急激に低下している行の位置を、心内膜輪郭の半径Rendoが存在する位置として決定する。
【0066】
本実施形態の他の一例では、上記の2つの心内膜輪郭取得方法を組み合わせても良い。具体的には、この本実施形態では、各画像スライスにおけるエッジを検出し、極座標系において、各画像スライスの左心室の心内膜輪郭の第1半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。そして、各画像スライスの左心室の心内膜輪郭の第2半径を当該画像スライス内の初期輪郭に基づいて取得する。そして、極座標系において、左心室の心内膜輪郭の第1半径と第2半径との平均位置付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。ここで、適用要求に基づいて、第1半径と第2半径とを加重平均してもよい。
【0067】
上記の心内膜輪郭を取得する実施形態において、上記直線検出法としてハフ変換法を用いることができる。更に、初期輪郭の平滑化処理において、画像スライス内の初期輪郭を、極座標系においてハフ変換法を用いたフィッティング(fitting)を行ない、乳頭筋が心内膜輪郭の範囲内に含まれるような心内膜輪郭を得ても良い。他の方法と比較して、
エッジ画素(エッジ点ともいう)のフィッティングを行なう場合は、ハフ変換法は、大多数のエッジ点を含む輪郭を取得でき、乳頭筋及びノイズ等のエッジ点を排除することができる。その他の方法では、通常、小さい半径のエッジ画素でも考慮され、その結果、乳頭筋の影響を受けやすい。
【0068】
更に、本実施形態に係る左心室画像分離方法の一例では、左心室の心内膜輪郭だけでなく、左心室の心外膜輪郭も取得することができる。左心室の心内膜輪郭と心外膜輪郭とに基づいて、心筋の厚さを決定できる。
【0069】
この実施形態では、画像スライスの周方向への投影により心内膜輪郭のエッジ画素と心筋の厚さを決定して、心外膜輪郭の極座標系における大体の位置を決定する。その後、画像スライスのエッジ画像の中から、カーブフィッティング法により心外膜輪郭を取得する。具体的には、各画像スライスにおけるエッジを検出する。そして、極座標系において、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。そして、極座標系において、各画像スライス内の左心室の心筋の厚さを、当該画像スライスのエッジ画像の周方向への投影と当該画像スライス内の左心室の心内膜輪郭の半径とを用いて決定することで、各画像スライス内の左心室の心外膜輪郭の半径を取得する。そして、極座標系において、左心室の心外膜輪郭の半径付近に位置するエッジから左心室の心外膜輪郭を、カーブフィッティング法を用いて取得する。そして、左心室の心外膜輪郭を対応する元の画像スライスに位置付ける。
【0070】
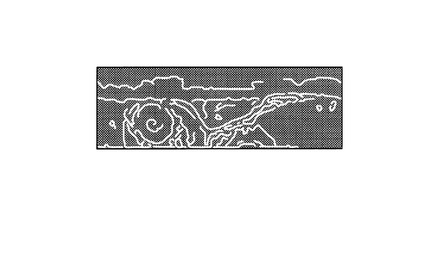
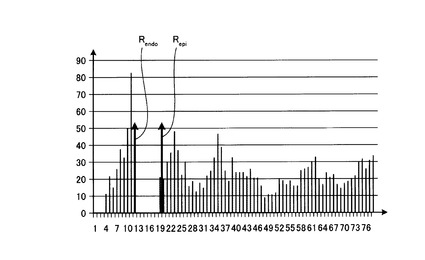
図12Aは、極座標系における画像スライスのエッジ画像を示す図である。図12Bは、図12Aにおけるエッジ画像の周方向への投影を示す図である。図12Bにおいて、横座標は、画像スライスのエッジ画像における行(row)であり、縦座標は、各行における画素値の和、或いは、各行における画素値の平均値である。精度要求の程度に基づき、1つ、或いは、複数の画素を一単位として、画像スライスは、行に分割される。図12Bに示すように、画素値の和、或いは、平均値が急激に低下している行の位置を、心内膜輪郭の半径Rendoが存在する位置として決定する。エッジ画像において、心内膜輪郭と心外膜輪郭の間の心筋部分は基本的にエッジを含まない。従って、周方向への投影では、心内膜輪郭と心外膜輪郭との間に隙間(gap)が生じる。これにより、図12Bに示すように、心内膜輪郭の半径Rendoの直近に位置する隙間が、心内膜輪郭と心外膜輪郭との間の心筋の厚さとして決定され、この隙間の直後の位置が、心外膜輪郭の半径Repiが存在する位置として決定される。
【0071】
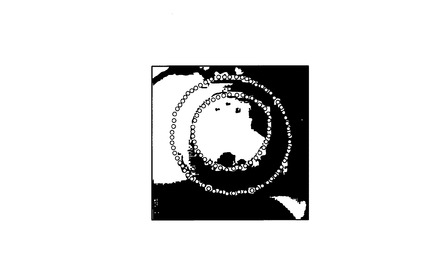
図13Aは、極座標系において取得された心内膜輪郭及び心外膜輪郭を示す図である。図13Aの上の輪郭線は、心内膜輪郭を表し、下の輪郭線は、心外膜輪郭を表す。図13Bは、図13Aで取得された心内膜輪郭及び心外膜輪郭を元の画像スライス上へ変換した図である。図13Bの心内膜輪郭(白抜き円で結ばれた線で示す)は、滑らかであり、突出を含まない。すなわち、乳頭筋の影響は、除去されている。
【0072】
更に、本実施形態の一例では、上記の本実施形態に係る運動対象輪郭抽出方法により、時系列3次元医用画像から、運動対象である左心室の輪郭を、左心室の初期輪郭として抽出する。そして、各画像スライス内の左心室の初期輪郭の中心を、当該画像スライスの極点として確定する。ここで、各時系列画像スライスにおける運動領域の中から左心室の候補領域を識別する場合、左心室の候補領域は、該当する画像スライスの運動領域の複数の画像特徴及び左心室の推定中心位置に基づいて識別される。一例として、運動領域の複数の画像特徴は、2値化後の運動領域における連結領域の複数の特徴である。
【0073】
左心室(LV)の候補領域の自動識別プロセスにおいて、画像スライスが2値化され、画像スライスの連結領域が標識される。全ての連結領域は、様々な形状とサイズとを有する。特に、心尖部と心基部とでは、左心室の候補領域の識別が困難である。心尖部では、LV領域は、小さく、その他の隣接情報を取得できない場合では、心尖部のLV領域は、ノイズのように見える。心基部では、LV領域は、常に右心室(RV)と連結している。この観点から、この実施形態では、運動領域の連結領域の多種画像特徴により、LVの候補領域を識別することができる。これら特徴は、例えば、面積、円形比(circularity ratio)、緊密度(compactness)、矩形度(rectangularity)、偏心度(eccentricity)、重心距離分散(centroid distance variance)を含む。ここで、円形比は、連結領域の形状が円形に近づく程度を示す。緊密度は、連結領域の面積と連結領域の最小境界フレームとの比率を示す。矩形度は、連結領域の高さに対する幅の比、又は、連結領域の幅に対する高さの比を示す。偏心度は、連結領域の主軸の長さと副軸の長さとの比率を示す。重心距離分散は、連結領域のエッジ点から重心までの距離の分散を示す。
【0074】
連結領域の画像特徴に加えて、LVの識別を更に正確とするために、LVの位置も用いても良い。ここで、用手的にマーキングされたLVの中心位置を用いることもできるし、推定したLV中心位置を用いることもできる。具体例として、テンプレートとして予め決定された時系列画像スライスのLVの初期輪郭を用いて、LVの中心位置を推定することができる。典型的には、予めテンプレートとして決定される時系列画像スライスは、全ての時系列画像スライスの中間に位置する時系列画像スライスである。かかる時系列画像スライスでは、LVの形状は、より正常となる。また、識別を補助するために、3次元空間におけるLVの中心線をフィッティングすることもできる。テンプレートとして予め決定された時系列画像スライス内のLVの候補領域は、連結領域の画像特徴を用いて識別することができ、LVの候補領域の中心を、LVの推定中心として算出することができる。
【0075】
LVの推定中心位置が比較的信頼度が高い特徴であることから、一実施形態では、左心室の候補領域を識別する際、左心室の推定中心位置に割り当てる重みを、複数の画像特徴に割り当てる重みより大きくする。
【0076】
(3.運動対象輪郭抽出装置)
以下、図14〜図17を参照して、本実施形態に係る運動対象輪郭抽出装置について説明する。運動対象輪郭抽出装置は、時系列3次元画像から変形運動を行なう運動対象の輪郭を抽出する。時系列3次元画像は、複数の時点で取得された複数の3次元画像を含む。各3次元画像は、互いに平行な複数の2次元の画像スライスで構成される。複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。本実施形態に係る運動対象輪郭抽出装置は、各種の時系列3次元画像から運動対象の輪郭を抽出するために用いることができる。例えば、時系列3次元画像は、医用画像診断装置にて取得された被検体のデータに基づいて生成された時系列に沿った医用画像であるが、これに限定されるものでない。
【0077】
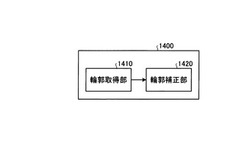
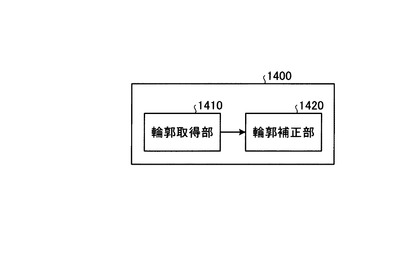
図14は、本実施形態に係る運動対象輪郭抽出装置の一例を示すブロック図である。図14に示すように、運動対象輪郭抽出装置1400は、輪郭取得部1410と輪郭補正部1420とを備える。輪郭取得部1410は、各画像スライス内の運動対象の輪郭を取得する。輪郭補正部1420は、複数の時系列画像スライスそれぞれにおける運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の運動対象の輪郭を補正する。
【0078】
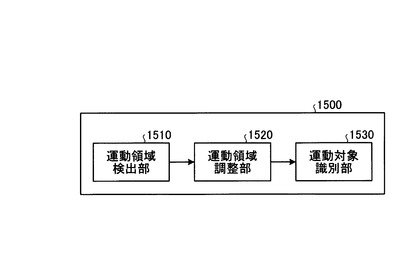
ここで、運動対象の輪郭は、各種の既知の方法により取得される。図15は、本実施形態に係る輪郭取得部の一例を示すブロック図である。図15に示すように、輪郭取得部1500は、運動領域検出部1510、運動領域調整部1520及び運動対象識別部1530を備える。運動領域検出部1510は、各時系列画像スライスにおける運動領域を、当該時系列画像スライスにおける画素値の時間に伴う変化に基づいて検出する。運動領域調整部1520は、時系列3次元画像における所定の時系列画像スライスの運動領域を基準として、時系列3次元画像における他の時系列画像スライスの運動領域を調整する。具体的には、運動領域調整部1520は、図2のステップS220に示す方法により運動領域を調整する。運動対象識別部1530は、各時系列画像スライスにおける運動領域の中から運動対象の候補領域を識別し、当該候補領域の輪郭を運動対象の輪郭とする。
【0079】
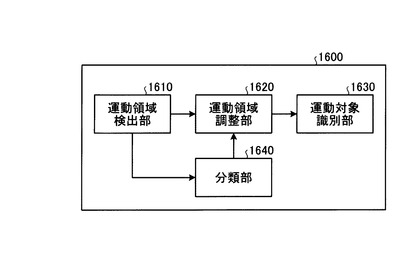
本実施形態の一例では、各時系列画像スライスの前記運動領域から抽出された特徴を用いて、運動領域調整部1620において用いられる所定の時系列画像スライスを決定する。図16は、本実施形態に係る輪郭取得部の他の一例を示すブロック図である。図16に示すように、輪郭取得部1600は、運動領域検出部1610、運動領域調整部1620、運動対象識別部1630及び分類部1640を備える。
【0080】
運動領域検出部1610、運動領域調整部1620及び運動対象識別部1630それぞれは、基本的に、図15に示す輪郭取得部1500に含まれる運動領域検出部1510、運動領域調整部1520及び運動対象識別部1530それぞれと同様であるので、ここでは繰り返して説明しない。
【0081】
分類部1640は、各時系列画像スライスの運動領域から抽出される特徴であって、平均画素値、運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、所定の時系列画像スライスを決定する。具体的な例として、分類部1640は、上記の運動対象輪郭抽出方法において記述された機械学習法に基づいて、所定の時系列画像スライスを決定する。
【0082】
本実施形態の他の一例によれば、輪郭取得部は、図16に示す輪郭取得部1600と基本的に同じ構成を有し、分類部(分類部1640)は、各時系列画像スライスの運動領域から抽出される特徴であって、平均画素値、運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、運動対象の両端に対応する2つの時系列画像スライスを決定する。この実施形態においては、輪郭取得部は、2つの時系列画像スライスの間に位置する時系列画像スライスの各画像スライス内の運動対象の輪郭を取得することができる。この実施形態においては、輪郭取得部は、全ての時系列画像スライスに対して運動対象の輪郭を取得するものではない。
【0083】
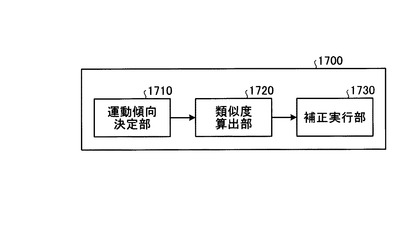
運動対象の輪郭が取得された後、運動対象の運動傾向情報に基づいて、取得された運動対象の輪郭が補正される。図17は、本実施形態に係る輪郭補正部の一例を示すブロック図である。図17に示すように、輪郭補正部1700は、運動傾向決定部1710、類似度算出部1720及び補正実行部1730を備える。
【0084】
運動傾向決定部1710は、各時系列画像スライスにおける前記運動対象の運動傾向情報を決定する。
【0085】
類似度算出部1720は、各時系列画像スライスにおける運動対象の運動傾向情報と、運動対象の基準運動傾向情報との類似度を算出する。本実施形態の一実施例によれば、類似度算出部1720は、全ての時系列画像スライスにおける運動対象の平均運動傾向情報を基準運動傾向情報として算出する。或いは、類似度算出部1720は、テンプレートとして予め決定された時系列画像スライスにおける運動対象の運動傾向情報を基準運動傾向情報とする。ここで、類似度算出部1720は、上記の図5のステップS520において記載された類似度計算方法(例えば、正規化相関アルゴリズム)により類似度を算出することができる。
【0086】
補正実行部1730は、特定の時系列画像スライスにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、所定の閾値より低い場合、当該特定の時系列画像スライスの各画像スライス内の運動対象の輪郭を補正する。本実施形態の一例では、補正実行部1730は、特定の時系列画像スライスに隣接する時系列画像スライスの各画像スライス内の運動対象の輪郭を用いて、当該特定の時系列画像スライスの各画像スライス内の運動対象の輪郭を補正する。本実施形態の他の一例では、補正実行部1730は、補正後の特定の時系列画像スライスにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、依然として、所定の閾値より低い場合、当該特定の時系列画像スライスを時系列3次元画像から除く。
【0087】
運動対象輪郭抽出装置における各構成の更に多くの詳細な操作については、上記の本実施形態に係る運動対象輪郭抽出方法で記述した内容を参考にできるので、ここでは繰り返して説明しない。
【0088】
本実施形態に係る運動対象輪郭抽出装置は、運動対象の運動傾向を用いて、運動対象の輪郭を補正することで、運動対象の変形を有利因子へ変換させ、誤った輪郭を決定して除去することを補助する。ここで、受ける干渉が最小の所定の時系列画像スライスの運動領域を基準として、その他の時系列画像スライスの運動領域を調整し、異常である他の時系列画像スライスの干渉の影響を除去することができる。更に、時系列3次元画像において運動対象の両端に対応する2つの時系列画像スライスを決定することにより、運動対象の両端以外に位置する時系列画像スライスに対しては輪郭抽出を実行しないとすることができるので、その結果、演算量を減らすことができ、後段の処理に好ましくない影響が及ぶことを回避することができる。更に、時系列3次元画像における運動対象の両端に対応する2つの時系列画像スライスを、少なくとも一つの運動領域の特徴に基づいて、例えばSVM分類器等の機械学習法により、決定することができる。
【0089】
(4.左心室画像分離装置)
以下、図18〜図21を参照して、本実施形態に係る左心室画像分離装置について説明する。左心室画像分離装置は、時系列3次元医用画像から、左心室の輪郭を取得する。時系列3次元医用画像は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む。各3次元画像は、左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成される。複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。
【0090】
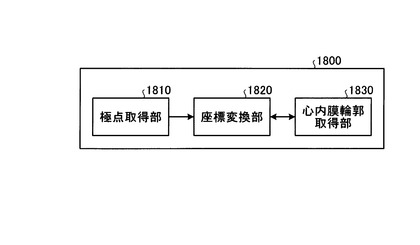
図18は、本実施形態に係る左心室画像分離装置の一例を示すブロック図である。図18に示すように、左心室画像分離装置1800は、極点取得部1810、座標変換部1820及び心内膜輪郭取得部1830を備える。極点取得部1810は、極座標変換のために、各画像スライス内の極点を取得する。座標変換部1820は、各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換し、心内膜輪郭取得部1830が取得した左心室の輪郭を対応する元の画像スライスに位置付ける(マッピングする)。心内膜輪郭取得部1830は、極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の左心室の輪郭として取得する。
【0091】
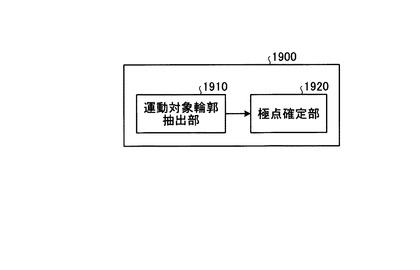
極点は、手動によりマーキングされたものでも良いし、既知の技術で適切な方法により確定されるものでも良い。図19は、本実施形態に係る極点取得部の一例を示すブロック図である。図19に示す極点取得部1900は、運動対象輪郭抽出部1910及び極点確定部1920を備える。運動対象輪郭抽出部1910は、時系列3次元医用画像から、運動対象である左心室の輪郭を、左心室の初期輪郭として抽出する。左心室を運動対象とする本実施形態に係る運動対象輪郭抽出装置を用いて、運動対象輪郭抽出部1910が実装される。極点確定部1920は、各画像スライス内の左心室の初期輪郭の中心を、当該画像スライスの極点として確定する。
【0092】
心内膜輪郭取得部1830は、既存の適切な方法により、極座標系において各画像スライス内の左心室の心内膜輪郭を取得することができる。
【0093】
本実施形態の一例では、座標変換部1820は、更に、極点取得部1900の運動対象輪郭抽出部1910が取得した各画像スライス内の左心室の初期輪郭を、各画像スライス内の極点に基づいて極座標系に変換する。心内膜輪郭取得部1830は、更に、極座標系における各画像スライス内の初期輪郭に対して平滑化処理を行なって、当該画像スライス内の心内膜輪郭を取得する。例えば、心内膜輪郭取得部1830は、ハフ変換法により各画像スライスにおける左心室の初期輪郭を平滑化する。これにより、運動対象輪郭抽出部1910が取得した左心室の初期輪郭に基づいて、最終的な心内膜輪郭を取得することができる。
【0094】
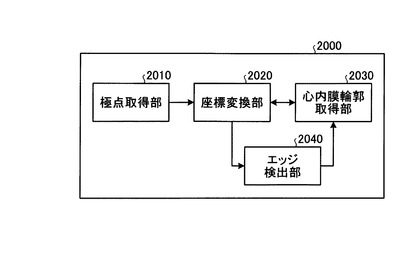
本実施形態の他の一例では、心内膜輪郭取得部1830は、画像スライスの周方向への投影を用いて、極座標における心内膜輪郭のおおよその位置を決定することができ、その後、直線検出法を用いて画像スライスのエッジ画像から心内膜輪郭を取得することができる。図20は、本実施形態に係る左心室画像分離装置の他の一例を示すブロック図である。図20に示すように、左心室画像分離装置2000は、極点取得部2010、座標変換部2020、心内膜輪郭取得部2030及びエッジ検出部2040を備える。極点取得部2010及び座標変換部2020は、図18に示す極点取得部1810及び座標変換部1820と、略同様の構成である。エッジ検出部2040は、各画像スライスにおけるエッジを検出する。エッジ検出部2040は、極座標系において各画像スライスのエッジを検出することができ、また、ユークリッド座標系において各画像スライスのエッジを検出して、エッジ画像を極座標系へ変換することもできる。心内膜輪郭取得部2030は、図18に示す心内膜輪郭取得部1830をベースとし、更に、極座標系において、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。そして、心内膜輪郭取得部2030は、極座標系において、左心室の心内膜輪郭の半径付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。
【0095】
本実施形態の他の一例では、本実施形態に係る運動対象輪郭抽出装置により運動対象輪郭抽出部1910を実行する場合、心内膜輪郭取得部2030は、更に、以下の方法により心内膜輪郭を取得することができる。すなわち、心内膜輪郭取得部2030は、極座標系において、各画像スライスの左心室の心内膜輪郭の第1半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。また、心内膜輪郭取得部2030は、各画像スライスの左心室の心内膜輪郭の第2半径を当該画像スライス内の初期輪郭に基づいて取得する。そして、心内膜輪郭取得部2030は、極座標系において、左心室の心内膜輪郭の第1半径と第2半径との平均位置付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。
【0096】
上記の一例において、心内膜輪郭取得部が用いる直線検出法は、ハフ変換法であっても良い。
【0097】
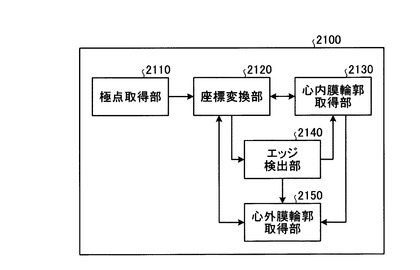
また、左心室の心外膜輪郭を取得するために、本実施形態に係る左心室画像分離装置は、更に、心外膜輪郭取得部を備えても良い。図21は、本実施形態に係る左心室画像分離装置の更に他の一例を示すブロック図である。図21に示すように、左心室画像分離装置2100は、極点取得部2110、座標変換部2120、心内膜輪郭取得部2130、エッジ検出部2140及び心外膜輪郭取得部2150を備える。ここで、極点取得部2110、座標変換部2120及び心内膜輪郭取得部2130は、図18に示す極点取得部1810、座標変換部1820及び心内膜輪郭取得部1830と基本的に略同じ構成である。エッジ検出部2140は、各画像スライスにおけるエッジを検出する。心外膜輪郭取得部2150は、左心室の心外膜輪郭を取得する。具体的には、心内膜輪郭取得部2130は、極座標系において、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。心外膜輪郭取得部2150は、極座標系において、各画像スライス内の左心室の心外膜輪郭の半径を、当該画像スライスのエッジ画像の周方向への投影と当該画像スライス内の左心室の心内膜輪郭の半径とを用いて取得する。そして、心外膜輪郭取得部2150は、極座標系において、左心室の心外膜輪郭の半径付近に位置するエッジから前記左心室の心外膜輪郭を、カーブフィッティング法を用いて取得する。また、座標変換部2120は、取得された心外膜輪郭の様子をユーザへ提示するために、更に、左心室の心外膜輪郭を対応する元の画像スライスに位置付ける。
【0098】
更に、本実施形態の他の一例では、本実施形態に係る運動対象輪郭抽出装置により、左心室画像分離装置の極点取得部の運動対象輪郭抽出部を実装する場合、運動対象輪郭抽出装置が有する運動対象認識部は、各時系列画像スライスにおける運動領域の中から前記左心室の候補領域を、当該画像スライスの運動領域の複数の画像特徴及び左心室の推定中心位置に基づいて識別する。左心室の推定中心位置は、複数の画像特徴よりも、大きな重みを付加されても良い。
【0099】
左心室画像分離装置の各構成についての更に多くの詳細な操作については、上記の本実施形態に係る左心室画像分離方法の記述と、上記の本実施形態に係る運動対象輪郭抽出方法における関連記述を参考にできるので、ここでは繰り返して説明しない。
【0100】
本実施形態に係る左心室画像分離装置では、オリジナルの画像スライスを極座標系へ変換し、元々曲線であり、ぼやけていた心内膜輪郭を直線で近似させて、比較的明瞭とする結果、より正確に、画像スライスから左心室を分離することができる。更に、極座標系においてハフ変換等を用いて心内膜の初期輪郭に対して平滑化を行ない、或いは、例えばハフ変換等の直線検出法により心内膜のエッジ画素点から心内膜輪郭をフィッティングし、乳頭筋の影響を除去することができる。また、画像スライスの周方向における投影を利用することにより、心内膜輪郭及び心外膜輪郭のおおよその位置を、更に正確に確定することができる。
【0101】
(5.本実施形態に係る方法/装置を実施可能なコンピュータ構成)
一例として、上述した運動対象輪郭抽出方法の各ステップと、上述した運動対象輪郭抽出装置の各構成モジュール、及び/又は、各構成ユニットとは、医用画像診断装置(例えば、X線診断装置、超音波診断装置、CT装置、MRI装置、PET装置等)のソフトウエア、ファームウエア、ハードウエア、或いは、それらの組み合わせとして、又は、これら医用画像診断装置の中の一部分として実施することができる。一例として、上述した左心室画像分離方法の各ステップと、上述した左心室画像分離装置の各構成モジュール、及び/又は、各構成ユニットとは、医用画像診断装置(例えば、X線診断装置、超音波診断装置、CT装置、MRI装置、PET装置等)のソフトウエア、ファームウエア、ハードウエアあるいはそれらの組み合わせとして、又は、これら医用画像診断装置の中の一部分として実施することができる。一例として、上述した方法及び装置は、既存の医用画像診断装置において、当該医用画像診断装置の各構成部分に対して、ある程度の改良をすることで、実施することができる。他の例として、上述した方法の各ステップと、上述した装置の各構成モジュール、及び/又は、各構成ユニットとは、医用画像診断装置とは独立した装置として実施してもよい。上述した装置の各構成や各ユニットは、ソフトウエア、ファームウエア、ハードウエア、或いは、それらを組み合わせた方式により構成することができるが、用いられる具体的手段や方式は当業者の周知のものであり、ここでは特に述べることはしない。
【0102】
一例として、上述した方法の各ステップと、上述した装置の各構成モジュール、及び/又は、各構成ユニットとは、ソフトウエア、ファームウエア、ハードウエア、或いは、それらの組み合わせとして実施しても良い。上述した方法の各ステップと、上述した装置の各構成モジュール、及び/又は、各構成ユニットとを、ソフトウエア又はファームウエアを介して実現した場合、上述した方法を実施するためのソフトウエアのプログラムは、記憶媒体から、或いは、ネットワークを介して、専用のハードウエア構造のコンピュータ(例えば、図22に示す汎用コンピュータ2200)へ、インストールして構成することができ、該コンピュータに各種プログラムがインストールされた状態で、各種機能等を実施することができる。
【0103】
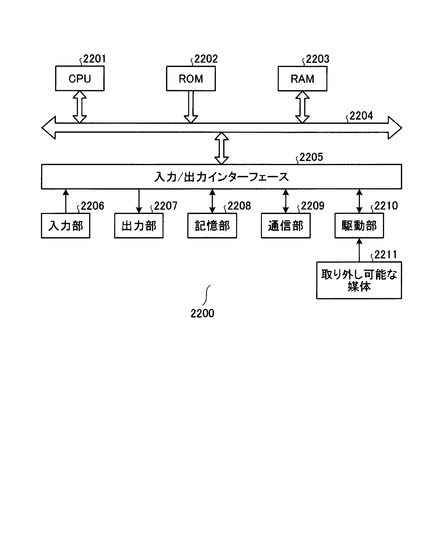
図22は、本実施形態に係る方法/装置を実現するためのコンピュータの構成例を示すブロック図である。図22において、中央演算処理装置であるCPU2201は、読み出し専用メモリであるROM2202の中に記憶されているプログラム、或いは、記憶部2208から読み書き兼用メモリであるRAM2203へ書き込まれたプログラムに基づいて、各種処理を実行する。RAM2203は、必要に応じて、CPU2201が各種処理等を実行するときに必要なデータも記憶する。CPU2201、ROM2202及びRAM2203は、バス2204を経由して、それぞれ接続されている。入力/出力インターフェース2205も、バス2204に接続されている。
【0104】
以下に記載する各部は、入力/出力インターフェース2205に接続されている。すなわち、入力部2206(キーボード、マウス等を含む)、出力部2207(例えば、ブラウン管(CRT)、液晶モニタ(LCD)等のモニタや、スピーカ等を含む)、記憶部2208(ハードディスク等を含む)、通信部2209(例えば、LANカード、モデム等のネットワークインターフェースカード)である。通信部2209は、ネットワーク(例えば、インターネット)を介して通信処理を実施する。必要に応じて、駆動部2210も入力/出力インターフェース2205に接続可能である。取り外し可能な媒体2211は、例えば、磁気ディスク、光ディスク、MO、半導体メモリ等であって、必要に応じて、駆動部2210に装着される。コンピュータプログラムは、必要に応じて、取り外し可能な媒体2211から読み出され、記憶部2208へインストールされる。
【0105】
ソフトウエアにより、上記の一連の処理を実行する場合、ソフトウエアを構成するプログラムは、インターネット等のネットワーク、或いは、例えば、取り外し可能な媒体2211等の記憶媒体から、インストールされる。
【0106】
当業者には自明であるように、かかる記憶媒体は、内部のプログラムを記憶し、そのプログラムを装置から離れたユーザに提供する取り外し可能な媒体2211に限定されない。取り外し可能な媒体2211の例としては、フロッピー(登録商標)ディスクを含む磁気ディスク、CD−ROMやDVDを含む光ディスク、MiniDisc(登録商標)を含む磁気光ディスク、半導体メモリ等が挙げられる。また、記憶媒体は、ROM2202であっても良く、記憶部2208に含まれるハードディスク等、その中にプログラムが記憶され、それらを含む装置からユーザへプログラムが送られる形態でも良い。
【0107】
本実施形態は、更に、コンピュータが読み取り可能な指示コードを記憶しているプログラムプロダクトを提供する。指示コードが、機器を介して読み取られると、本実施形態に係る方法が実施される。
【0108】
機器読み取り可能なコマンドコードを記憶しているプログラムプロダクトを持ち出すための記憶媒体も本実施形態に適用できる。その記憶媒体は、ハードディスク、光ディスク、磁気光ディスク、メモリカード、メモリスティックが挙げられるが、これらには限定されない。
【0109】
強調すべきは、上記の本実施形態の具体例においては、1つの具体例において記載した、及び/又は、図示した特徴は、同じ方式で、或いは、類似した方式で、1つ、又は、複数の他の具体例で適用したり、他の実施方法における特徴に置き換えたりすることも可能である。
【0110】
更に、上記の説明で、 “包含する/含む”といった用語を使用した時は、特徴・構成・ステップ、或いは、構造の存在を示しているが、その他の特徴・構成・ステップ、或いは、構造の存在や付加の排除を意味するものではない。
【0111】
上記の実施形態においては、数字構成の図番記号を用いて各ステップや構成を表記している。ただし、これらの図番記号は、単に、説明の記載や図面の描写を意図するものであり、その順序や、如何なる他の限定を表すものではない、と当業者は理解すべきである。
【0112】
更に、本実施形態の方法は、詳細な説明の欄において説明された順序に沿って実施されるものに限らず、その他の順序に沿って、並行して、或いは、独立して実施されても良い。従って、本願の詳細な説明において説明された方法の実施順序は、本実施形態の技術範囲に対する構成を制限するものではない。
【0113】
以上、本実施形態によれば、運動段階が異なる各画像内の運動対象の輪郭を正確に取得することができる。
【0114】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0115】
1400 運動対象輪郭抽出装置
1410 輪郭取得部
1420 輪郭補正部
【技術分野】
【0001】
本発明の実施形態は、運動対象輪郭抽出装置、左心室画像分離装置、運動対象輪郭抽出方法及び左心室画像分離方法に関する。
【背景技術】
【0002】
運動対象、特に、変形運動を行なう運動対象の輪郭抽出は、コンピュータビジョン(computer vision)分野における重要な研究課題の1つである。実際の適用において、例えば、医用分野では、コンピュータ断層撮影(CT:Computed Tomography)装置、磁気共鳴イメージング(MRI:Magnetic Resonance Imaging)装置、超音波(UL:Ultrasound)診断装置等の医用画像診断装置により取得された時系列3次元画像から、構造物、或いは、構造物の一部分の輪郭を抽出することは、当該構造物に関する各種パラメータに対する計測のために大変有用である。しかし、対象の変形運動により画像内の対象の方向、サイズ及び形状は、全て時間に伴って大きく変化し、画像強度も大きく変化する。このため、運動段階が異なる各画像内の対象の輪郭を正確に抽出することは、困難である。
【0003】
また、心臓病学分野においては、通常、核磁気共鳴イメージング技術による心臓の時系列3次元画像(3D+T)が用いられている。医師は、心室や心内膜、心外膜の識別に関心を寄せている。識別された心室や、心内膜、心外膜の輪郭は、異なる心周期での心室血容量(駆出率、EF:Ejection Fraction)、心室壁の運動、壁厚特性等のパラメータの計測に用いることができる。その中でも左心室(LV:Left Ventricle)は、酸素化された血液を心臓から全身の各臓器組織へ送り出す役割を担うことから、特に重要である。
【0004】
従来、4次元(4D)の心臓確率地図や3次元(3D)の左心室表面モデルのように、左心室分離を支援するためのモデルを構築する研究が行なわれている。その他の方法としては、勾配(gradient)、強度及び形状特徴による「Active Shape」を用いた左心室分離方法が研究されている。また、ユーザ対話(interaction)を利用した半自動左心室分離方法も多く利用されている。近年、ますます多くの研究者が完全自動化による左心室分離方法の研究を始めており、一定の成果を上げている。
【0005】
従来のモデルに基づく方法では、予測される以外の変化を捉えることが困難である。一般的に用いられる動的輪郭モデル(ACM:Active Contour Model、Snake)アルゴリズムは、ノイズと物理的な左心室の乳頭筋とに対して非常に影響を受けやすく、更に、初期条件に対しても影響を受けることがある。半自動化方法の多くは、主観的なユーザ対話が必要であり、且つ、操作者(医者)に時間を浪費させてしまう。更に、自動化方法の幾つかは、心臓の形状や心臓の画素輝度等に関して多くの仮定の下に成り立つ方法であって、改善が必要である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願公開第2009/0232371号公報
【特許文献2】米国特許出願公開第2009/0290777号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、運動段階が異なる各画像内の運動対象の輪郭を正確に取得することができる、運動対象輪郭抽出装置、左心室画像分離装置、運動対象輪郭抽出方法及び左心室画像分離方法を提供することである。
【課題を解決するための手段】
【0008】
実施形態の運動対象輪郭抽出装置は、時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する。前記時系列3次元画像は、複数の時点で取得された複数の3次元画像を含む。また、前記時系列3次元画像では、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している。そして、実施形態の運動対象輪郭抽出装置は、輪郭取得部と、輪郭補正部とを備える。前記輪郭取得部は、各画像スライス内の前記運動対象の輪郭を取得する。前記輪郭補正部は、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
【図面の簡単な説明】
【0009】
以下の実施形態の説明では、理解を助けるため図面を参考にしながら説明する。図面において、同じ、或いは、類似する技術特徴や各構成については、同じ、或いは、類似する附番や表記を用いて説明する。これらの図面は、以下の詳細な説明も含めて、本実施形態の良好な実施例や本実施形態の原理や優位性についての解説のために、更に例を挙げて説明するためのものである。
【図1】図1は、本実施形態に係る運動対象輪郭抽出方法の一例を示すフローチャートである。
【図2】図2は、本実施形態に係る各画像スライス内の運動対象の輪郭を抽出する方法の一例を示すフローチャートである。
【図3】図3は、所定の時系列画像スライスの運動領域を基準として、他の時系列画像スライスの運動領域を調整する一例を示す図である。
【図4A】図4Aは、時系列画像スライスの運動領域の中から運動対象の候補領域を識別する一例を示す図(1)である。
【図4B】図4Bは、時系列画像スライスの運動領域の中から運動対象の候補領域を識別する一例を示す図(2)である。
【図5】図5は、本実施形態において、運動対象の運動傾向情報に基づいて運動対象の輪郭を補正する一例を示すフローチャートである。
【図6】図6は、運動対象の複数の時系列画像スライスそれぞれにおける運動対象の運動傾向と基準運動傾向との類似度の一例を示す図である。
【図7】図7は、1つの時系列画像スライスにおける運動対象の輪郭補正の一例を示す図である。
【図8】図8は、本実施形態に係る左心室画像分離方法の一例を示すフローチャートである。
【図9】図9は、ユークリッド座標系と極座標系との変換関係の一例を示す図である。
【図10A】図10Aは、左心室の初期輪郭を極座標系に変換する一例を示す図(1)である。
【図10B】図10Bは、左心室の初期輪郭を極座標系に変換する一例を示す図(2)である。
【図11】図11は、極座標系における画像スライスのグレイスケール画像の周方向への投影の一例を示す図である。
【図12A】図12Aは、極座標系における画像スライスのエッジ画像を示す図である。
【図12B】図12Bは、図12Aにおけるエッジ画像の周方向への投影を示す図である。
【図13A】図13Aは、極座標系において取得された心内膜輪郭及び心外膜輪郭を示す図である。
【図13B】図13Bは、図13Aで取得された心内膜輪郭及び心外膜輪郭を元の画像スライス上へ変換した図である。
【図14】図14は、本実施形態に係る運動対象輪郭抽出装置の一例を示すブロック図である。
【図15】図15は、本実施形態に係る輪郭取得部の一例を示すブロック図である。
【図16】図16は、本実施形態に係る輪郭取得部の他の一例を示すブロック図である。
【図17】図17は、本実施形態に係る輪郭補正部の一例を示すブロック図である。
【図18】図18は、本実施形態に係る左心室画像分離装置の一例を示すブロック図である。
【図19】図19は、本実施形態に係る極点取得部の一例を示すブロック図である。
【図20】図20は、本実施形態に係る左心室画像分離装置の他の一例を示すブロック図である。
【図21】図21は、本実施形態に係る左心室画像分離装置の更に他の一例を示すブロック図である。
【図22】図22は、本実施形態に係る方法/装置を実現するためのコンピュータの構成例を示すブロック図である。
【発明を実施するための形態】
【0010】
以下において、本実施形態の基本的理解のために、その一例の概要について説明する。ただし、この概要は、本実施形態のキーワードや重要な部分を確定するものではなく、本実施形態の範囲を限定するものでもない。その目的は、単に、本実施形態の概念を簡潔に説明するためのものであり、その後に論述する更に詳細な説明の序章にすぎない。
【0011】
本実施形態の目的は、運動段階が異なる各画像内の運動対象の輪郭を正確に取得する運動対象輪郭抽出方法及び装置を提供することである。本実施形態の他の目的は、正確かつ確実に画像から左心室を分離する左心室画像分離方法及び装置を提供することである。
【0012】
本実施形態に係る運動対象輪郭抽出方法は、複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する方法である。前記運動対象輪郭抽出方法は、各画像スライス内の前記運動対象の輪郭を取得する。そして、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
【0013】
本実施形態に係る運動対象輪郭抽出装置は、複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する装置である。前記運動対象輪郭抽出装置は、各画像スライス内の前記運動対象の輪郭を取得する輪郭取得部と、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する輪郭補正部とを備える。
【0014】
本実施形態に係る左心室画像分離方法は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する方法である。前記左心室画像分離方法は、極座標変換のために、各画像スライス内の極点を取得し、各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換し、前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得する。そして、前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付ける。
【0015】
本実施形態に係る左心室画像分離装置は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する装置である。前記左心室画像分離装置は、極座標変換のために、各画像スライス内の極点を取得する極点取得部と、各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換する座標変換部と、前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得する心内膜輪郭取得部とを備える。そして、前記座標変換部は、前記心内膜輪郭取得部が前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付ける。
【0016】
また、本実施形態は、更に上述方法を実現するためのコンピュータプログラムを提供する。
【0017】
更に、本実施形態は、少なくともコンピュータ読み取り可能な媒体形式のコンピュータプログラムプロダクトを提供し、その上、上述方法を実現するためのコンピュータプログラムコードを提供する。
【0018】
(実施形態)
以下、本実施形態について図面を参照しながら説明する。本実施形態の1つの図面や1つの実施例において説明される構成や特徴は、1つ又は複数の他の図面や1つ又は複数の他の実施例における構成や特徴と組み合わせることが可能である。なお、説明をわかりやすくするために、図面と説明とにおいて本実施形態と関係の無い内容や、当業者にとって既知の構成や処理に関する表示や説明については省略する。
【0019】
以下、本実施形態について「1.運動対象輪郭抽出方法」、「2.左心室画像分離方法」、「3.運動対象輪郭抽出装置」、「4.左心室画像分離装置」、「5.本実施形態に係る方法/装置を実施可能なコンピュータ構成」の順番で説明する。
【0020】
(1.運動対象輪郭抽出方法)
まず、図1〜図7を用いて、本実施形態に係る運動対象輪郭抽出方法について説明する。本実施形態に係る運動対象輪郭抽出方法は、時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する。時系列3次元画像それぞれは、複数の時点で取得された複数の3次元画像を含む。そして、各3次元画像が互いに平行な複数の2次元の画像スライスで構成される。そして、複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。ここで、本実施形態に係る運動対象輪郭抽出方法は、各種の時系列3次元画像から運動対象の輪郭を抽出する。一例として、時系列3次元画像は、医用画像診断装置により取得された被検体のデータに基づいて生成された時系列医用画像であるが、これに限定されるものではない。ここで述べる医用画像診断装置は、X線診断(XR)装置、超音波診断(UL)装置、コンピュータ断層診断(CT)装置、磁気共鳴診断(MRI)装置、ポジトロン断層撮影(PET)装置等を含むが、これに限定されるものではない。
【0021】
図1は、本実施形態に係る運動対象輪郭抽出方法の一例を示すフローチャートである。本実施形態では、運動対象の変形が有利要素へ転換され、運動対象の運動傾向を利用して運動対象の輪郭が補正される。
【0022】
図1に示すように、ステップS110において、各画像スライスにおける運動対象の輪郭を取得する。ここで、運動対象の輪郭は、各種既知の方法により取得される。例えば、運動対象の輪郭は、マニュアルラベリング(Manual Labeling)により取得される。また、他の一例として、既知の対象検出方法により、各画像スライスの中から運動対象の候補領域を検出し、この運動対象の候補領域の輪郭を抽出して、運動対象の輪郭としても良い。本開示で提案する好適な方法として、本実施形態に係る運動対象輪郭抽出方法の一例について、図2〜図4の組み合わせを参照しながら、以下、説明する。
【0023】
運動対象の輪郭を抽出した後、ステップS120において、運動対象の運動傾向情報に基づいて運動対象の輪郭を補正する。運動対象は、全体であり、運動対象の各部分の変形運動は、通常、統一的であることから、変形運動の傾向は、一貫性を有する。
互いに平行な運動対象の複数のスライス面を参照すると、運動対象の各スライス面の運動は、互いに相関性を有する。従って、各時系列画像スライスにおいて、運動対象の運動傾向は、一致するはずである。そして、各時系列画像スライスにおいて、運動対象の輪郭の変化傾向も、一致するはずである。1つの時系列画像スライスにおける運動対象の運動傾向と、大部分の時系列画像スライスにおける運動対象の運動傾向、又は、基準運動傾向とが一致しない場合、この時系列画像スライスにおいて取得された輪郭は、間違いであると判断することができ、この場合は補正が必要となる。かかる補正により、補正後の時系列画像スライスにおける運動対象の運動傾向と、大部分の時系列画像スライスにおける運動対象の運動傾向、又は、基準運動傾向とが一致する。当業者は、上述の説明の手引きの下で、各種異なる手段により該補正を実施することができる。本開示で提案する好適な方法として、本実施形態に係る運動対象輪郭抽出方法の一例について、図5〜図7の組み合わせを参照しながら、以下、説明する。
【0024】
図2は、本実施形態に係る各画像スライス内の運動対象の輪郭を抽出する方法の一例を示すフローチャートである。
【0025】
ステップS210において、各時系列画像スライスにおける運動領域を、当該時系列画像スライスにおける画素値の時間に伴う変化に基づいて検出する。1つの時系列画像スライスに対して、運動領域における各画素値は、時間に沿って顕著な変化を呈する。このステップの方法を実現する従来の方法は数多くあり、例えば、タイムドメイン分散法、フレーム間差分法等を採用することができ、ここでは具体的に記載しない。
【0026】
ステップS220において、時系列3次元画像における所定の時系列画像スライスの運動領域を基準として、時系列3次元画像におけるその他の時系列画像スライスの運動領域を調整する。実際の応用場面では、通常、運動対象が受ける干渉が最小となる1つの時系列画像スライスを、上述の所定の時系列画像スライスとして採用することができる。例えば、所定の時系列画像スライスは、手動により指定されたり、或いは、経験に基づくある位置で、予め決定されたりする。
【0027】
図3は、所定の時系列画像スライスの運動領域を基準として、他の時系列画像スライスの運動領域を調整する一例を示す図である。この例では、MRI装置により心臓の短軸方向(すなわち、心臓の長軸方向に直交する方向である。一般的には、心臓の長軸方向と交わる方向とされても良い)において取得された時系列3次元画像を示している。ステップS210の運動領域検出では、1つの時系列画像スライスが、通常、1つの運動領域に対応する、すなわち、同じ時系列画像スライスにおける各画像スライスが、同じ運動領域を有することとなる。簡潔に説明するため、図3における各画像スライスは、それぞれが1つの時系列画像スライスから選択された画像スライスである。図3に例示する運動対象は、心臓の左心室であり、図3に例示する複数の画像スライスそれぞれは、心臓拡張期にそれぞれ取得された時系列画像スライスにおける画像スライスである。図3において、最上端の画像スライスは、心基部の画像スライスであり、最下端の画像スライスは、心尖部の画像スライスであり、最上端と最下端との間の画像スライスは、心基部から心尖部の間の部分で順次取得された画像スライスである。なお、運動対象輪郭抽出方法及び装置を説明するために、心臓画像を例とするが、これに限定されるものではない。本実施形態は、それ以外の対象についても同様に適用することができる。
【0028】
図3に示す一例では、最上端の心基部の時系列画像スライスの運動領域を基準にして、残りの時系列画像スライスの運動領域を調整する。図3では、残りの時系列画像スライスにおける実線の枠は、調整後の運動領域を表す。図3に示す最下端の心尖部の画像スライスにおける破線の枠は、調整前の運動領域を表す(残りの画像スライスにおける調整前の運動領域は、図示せず)。
【0029】
心臓の短軸方向で取得された複数の画像スライスの左心室において、主な干渉源は、心臓周囲の大血管である。大血管の形状は左心室の形状と類似し、かつ、動的である。心尖の運動量は比較的小さいので、心尖部は、大血管運動の影響を更に受けやすい。このことから、図3に示す一例においては、受ける干渉が最小の心基部の時系列画像スライスを、所定の時系列画像スライスとし、心基部の時系列画像スライスの運動領域に基づいて、その他の時系列画像スライスの運動領域を調整する。これにより、その他の時系列画像スライスにおいて、大血管による干渉を除去することができる。
【0030】
図2に戻って、ステップS230において、各時系列画像スライスにおける運動領域の中から前記運動対象の候補領域を識別し、当該候補領域の輪郭を運動対象の輪郭とする。各画像スライス内の運動対象の候補領域は、各時系列画像スライスの運動領域から、多種類特徴識別法(multiple-feature recognition method)のように、既知のオブジェクト検出法を用いて検出することができる。
【0031】
図4A及び図4Bは、時系列画像スライスの運動領域の中から運動対象の候補領域を識別する一例を示す図である。図4Aは、MRI装置により取得された時系列3次元画像の心臓の短軸方向における画像スライスが2値化されて連結された領域を標識した運動領域を示している。図4Aに示すように、比較的大きな2つの連結領域それぞれは、左心室の候補領域及び右心室の候補領域である。図4Bは、左心室の運動領域の2値化画像であり、この2値化画像内の連結領域は、識別された左心室の候補領域である。図4Bにおいて識別された左心室の候補領域の輪郭は、左心室の輪郭とすることができる。
【0032】
この他、本実施形態の一例では、各時系列画像スライスの前記運動領域から抽出される特徴に基づいて、所定の時系列画像スライスを決定する。例として、かかる特徴は、平均画素値、前記運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び前記運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つとすることができる。
【0033】
具体的な実行例として、機械学習(Machine learning)により上記の所定の時系列画像スライスを決定できる。例えば、サポートベクターマシン(SVM:Support Vector Machine)分類器や、その他の適切な分類器により、所定の時系列画像スライスを決定できる。一態様として、時系列3次元画像における各時系列画像スライスの個々の画像スライスの運動領域から抽出された上記の特徴からなるサンプルバンク(sample bank)により分類器を学習する。そして、学習された分類器により、時系列3次元画像から所定の時系列画像スライスを決定する。上記特徴を採用した分類方法により、時系列3次元画像における所定の時系列画像スライスを正確に探し出すことができる。
【0034】
本実施形態では、1つの時系列3次元画像において、運動対象の本当の範囲外となる時系列画像スライスが存在する場合がある。これらの時系列画像スライスから抽出された運動対象の輪郭は、誤りであり、これが採用された後段の処理で、運動対象の輪郭を利用して運動対象に関するパラメータを算出すると、正確性に影響を及ぼす。
【0035】
本実施形態の一例において、運動対象の輪郭を取得する前に、このような時系列画像スライスを探し出し、これらから抽出した運動対象の輪郭は誤りであると決定する、或いは、直接これらを除去とすることで、後段でのパラメータ算出の正確性に及ぼす影響を回避することができる。本実施形態では、各時系列画像スライスの運動領域を検出した後、そして、所定の時系列画像スライスの運動領域を基準として、他の時系列画像スライスの運動領域を調整する前に、運動対象の両端に対応する2つの時系列画像スライスを、各時系列画像スライスの前記運動領域から抽出される以下の特徴の少なくとも1つの特徴を用いて決定する。かかる特徴は、例えば、平均画素値、運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率である。
【0036】
運動対象の両端に対応する2つの時系列画像スライスを決定した後、各画像スライス内の輪郭を抽出した場合、これら2つの時系列画像スライスの間に位置する時系列画像スライスの各画像スライス内の運動対象の輪郭を取得するのみとなる。これら2つの時系列画像スライスは、時系列3次元画像から除去される。
【0037】
同様に、機械学習(Machine learning)により上記の両端に対応する2つの時系列画像スライスを決定できる。例えば、サポートベクターマシン(SVM:Support Vector Machine)分類器や、その他の適切な分類器により、所定の時系列画像スライスを決定できる。一態様として、時系列3次元画像における各時系列画像スライスの個々の画像スライスの運動領域から抽出された上記の特徴からなるサンプルバンク(sample bank)により分類器を学習する。そして、学習された分類器により、時系列3次元画像から両端に対応する2つの時系列画像スライスを決定する。上記特徴を採用した分類方法により、時系列3次元画像における両端に対応する2つの時系列画像スライスを正確に探し出すことができる。
【0038】
MRI装置により取得した心臓短軸方向の時系列3次元画像において、左心室が運動対象の場合、上記の運動対象の両端に対応する2つの時系列画像スライスそれぞれは、心基部の時系列画像スライスと、心尖部の時系列画像スライスとなる。
【0039】
図5は、本実施形態において、運動対象の運動傾向情報に基づいて運動対象の輪郭を補正する一例を示すフローチャートである。
【0040】
ステップS510において、各時系列画像スライスにおける運動対象の運動傾向情報を決定する。運動対象の輪郭が変化する傾向は、運動対象の運動傾向運動を表すために用いることができる。例えば、運動対象の運動傾向情報を表すものとして、運動対象の輪郭の半径の時間に伴う変化、運動対象の輪郭の周囲長の半径の時間に伴う変化、運動対象の輪郭で囲まれる面積の半径の時間に伴う変化の少なくとも1つを用いることができる。
【0041】
ステップS520において、各時系列画像スライス(時系列画像スライスi)における運動対象の運動傾向情報と、運動対象の基準運動傾向情報との類似度を算出する。ここで、運動対象の基準運動傾向情報は、予め決定されたものとされる。一例として、運動対象の基準運動傾向情報は、複数の時系列画像スライスにおける運動対象の平均運動傾向情報、又は、テンプレートとして予め決定された時系列画像スライスにおける運動対象の運動傾向情報とされるが、これに限定されるものではない。
【0042】
類似度は、既知の適切な類似度算出法におり算出される。一例として、類似度は、正規化相関(NCC:Normalized Cross Correlation)法を用いて算出されるが、これに限定されるものではない。理解のために、以下のNCC法の式(1)を用いるとする。なお、この式に対して、各種の数学的変形を行なっても良い。
【0043】
【数1】
【0044】
ここで、「i」は、時系列3次元画像において、類似度の算出対象となる時系列画像スライスの索引を示す。「t」は、時系列3次元画像において、予めテンプレートとして決定された時系列画像スライスの索引を示す。「N」は、1つの時系列画像スライスの位相数を示す。すなわち、「N」は、1つの時系列画像スライスにおける画像スライスそれぞれが取得された時点の数であり、この時系列画像スライスにおける画像スライスの数に等しい。「Ii,n」は、第i番目の時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)を示す。「上にバーが付与されたIi」は、第i番目の時系列画像スライスにおける全ての画像スライス内の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。「ρ(i,t)」は、第i番目の時系列画像スライスにおける運動対象の運動傾向情報と、予めテンプレートとして決定された時系列画像スライスtにおける運動対象の運動傾向情報(基準運動傾向情報)との類似度を示す。
【0045】
運動対象の基準運動傾向情報が、テンプレートとして予め決定された時系列画像スライスにおける運動対象の運動傾向情報である場合、「It,n」は、テンプレートとして予め決定された時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)を示す。また、「上にバーが付与されたIt」は、テンプレートとして予め決定された時系列画像スライスにおける全ての画像スライス内の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。
【0046】
運動対象の基準運動傾向情報が、全ての時系列画像スライスにおける運動対象の平均運動傾向情報である場合、「It,n」は、各時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。また、「上にバーが付与されたIt」は、各時系列画像スライスにおける全ての画像スライスの中の運動対象の面積(或いは、周囲長、半径等のその他の特徴)の平均値を示す。
【0047】
なお、運動対象の基準運動傾向情報が、各時系列画像スライスにおける運動対象の運動傾向情報の平均値である場合、先ず、各時系列画像スライスにおける運動対象の該時系列画像スライスにおける複数の画像スライスの中の特徴値(面積、周囲長、或いは、半径等)を正規化し、その後、「It,n」及び「上にバーが付与されたIt」を、上記で説明した内容により算出することが好適である。すなわち、「It,n」は、各時系列画像スライスにおける第n番目の位相に対応する画像スライスの中の運動対象の正規化面積(或いは、周囲長、半径等のその他の特徴を正規化した値)を示すこととなる。また、「上にバーが付与されたIt」は、各時系列画像スライスにおける全ての画像スライスの中の運動対象の正規化面積(或いは、周囲長、半径等のその他の特徴を正規化した値)を示すこととなる。
【0048】
ステップS530において、時系列画像スライスiにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、所定の閾値より低い否かを判断する。時系列画像スライスiにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、所定の閾値より低い場合、該時系列画像スライスにおいて取得された輪郭が誤りであり補正が必要であるので、ステップS540に進む。低くないのであれは、ステップS550に進む。
【0049】
ステップS540において、時系列画像スライスiの各画像スライス内の運動対象の輪郭を補正する。本実施形態では、一例として、時系列画像スライスiに隣接する時系列画像スライスの各画像スライス内の運動対象の輪郭を用いて、時系列画像スライスiの各画像スライス内の運動対象の輪郭を補正する。
【0050】
なお、更に、補正後の時系列画像スライスiにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、引き続き、所定の閾値より低い場合、補正後の時系列画像スライスiにおける輪郭は依然として誤りが存在するので、時系列画像スライスiを時系列3次元画像から除いても良い。これにより、後段の処理に対して悪影響を与えることを回避できる。
【0051】
ステップS550において、全ての時系列画像スライスに対して上記の処理が完了したか否かを判断する。もし、全ての時系列画像スライスに対する処理が完了したと判断された場合、一連のプロセスは終了する。もし、まだ完了していない場合は、iをインクリメントして、ステップS520まで戻り、引き続き、時系列3次元画像における次の時系列画像スライスに対して、類似度を算出する。
【0052】
図6は、運動対象の複数の時系列画像スライスそれぞれにおける運動対象の運動傾向と基準運動傾向との類似度の一例を示す図である。図6に示す一例においては、運動対象の輪郭の面積の変化傾向を運動対象の運動傾向としている。横座標の「S0、S1、...、S8」は、時系列画像スライスそれぞれの空間位置を示す符号である。縦座標は、運動対象の輪郭の面積を示す。同じ符号における1つの時系列画像スライスでの複数の縦線それぞれは、該時系列画像スライスにおける複数の画像スライス内の運動対象の輪郭の面積を示す。これらの縦線の変化傾向は、該時系列画像スライスにおける運動対象の運動傾向を反映している。図6に示す一例においては、時系列画像スライスS5における運動傾向を基準運動傾向としている。ここで、横座標の下の一行では、NCC法を用いて算出された各時系列画像スライスにおける運動対象の運動傾向と基準運動傾向との類似度を示している。図6に例示するように、時系列画像スライスS7及びS8における運動傾向は、基準運動傾向と明らかに異なる。これにより、S7とS8とで算出された類似度も低くなる。
【0053】
図7は、1つの時系列画像スライスにおける運動対象の輪郭補正の一例を示す図である。図7に例示する時系列画像スライスS7は、MRI装置により取得した心臓短軸方向の時系列3次元画像の1つの時系列画像スライスである。図7では、左心室が運動対象である。図7における2行目の2値化画像は、時系列画像スライスS7における補正前の左心室の輪郭を示している。これに示されるように、補正前では、時系列画像スライスS7における幾つかの画像スライス内の左心室の輪郭は、実際の左心室の輪郭と大きく異なる。上記の類似度計算により、時系列画像スライスS7における左心室の輪郭を補正する必要があると決定できる。図7における3行目の2値化画像は、時系列画像スライスS6における補正無しの左心室の輪郭を示している。時系列画像スライスS6は、時系列画像スライスS7に隣接する時系列画像スライスである。時系列画像スライスS7における輪郭は、時系列画像スライスS6における輪郭に基づいて補正され、その結果、図7における4行目の2値化画像に示すように、時系列画像スライスS7における補正された輪郭が得られる。補正により、時系列画像スライスS7における左心室の輪郭は、実際の左心室の輪郭に近づく。
【0054】
(2.左心室画像分離方法)
以下、本実施形態に係る左心室画像分離方法について、図8〜図13を用いて説明する。本実施形態に係る左心室画像分離方法は、時系列3次元医用画像から左心室の輪郭を取得する。通常、左心室の輪郭は、左心室の心内膜輪郭となる。好適には、本実施形態に係る左心室画像分離方法は、更に、左心室の心外膜輪郭を抽出し、抽出した心内膜輪郭と組み合わせて、心筋層を決定することができる。上記の時系列3次元医用画像は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む。各3次元画像は、左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成される。複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。
【0055】
図8は、本実施形態に係る左心室画像分離方法の一例を示すフローチャートである。本実施形態において、左心室の心内膜輪郭と心外膜輪郭とは、共に曲線であり、且つ、心内膜輪郭は、乳頭筋の影響を受けやすく、心外膜の輪郭は、比較的ぼやけているので、より正確に画像スライスから心内膜輪郭と心外膜輪郭とを抽出するために、元の画像スライスを極座標系へ変換する。
【0056】
図9は、ユークリッド座標系と極座標系との変換関係の一例を示す図である。同図において、ユークリッド座標系における原点は、極座標系の極点に対応する。極座標系における横座標は、ユークリッド座標系における点と原点とをつなぐ線の横軸正方向に対する角度を示す。また、極座標系における縦座標は、ユークリッド座標系における点と原点との距離を示す。ユークリッド座標系における半径の異なる複数の円は、極座標系へ変換された後は、異なる高さの直線となる。一方、極座標系における高さの異なる複数の直線は、ユークリッド座標系に変換された後は、半径の異なる複数の円となる。
【0057】
図8に戻って、ステップS810において、極座標変換のために、各画像スライス内の極点を取得する。かかる極点は、通常、画像スライスにおける左心室の輪郭の中心である。かかる極点は、手動でマークされても良いし、適切な従来技術により確定されても良い。本実施形態の一例では、上記の実施形態で説明した運動対象輪郭抽出方法を用いて、時系列3次元医用画像から、運動対象である左心室の輪郭を、左心室の初期輪郭として抽出する。そして、各画像スライス内の左心室の初期輪郭の中心を、当該画像スライスの極点として確定する。
【0058】
ステップS820において、各画像スライス内の極点に基づいて当該画像スライスを極座標系へ変換する。すなわち、ステップS820において、極点に基づいて、時系列画像スライスを極座標系へ変換する。実際の応用場面においては、演算量を減らすために、画像スライス全体を極座標系へ変換するのではなく、画像スライスにおける運動領域の部分だけを極座標系へ変換する。
【0059】
ステップS830において、極座標系における各画像スライス内の心内膜輪郭を取得して左心室の輪郭とする。極座標系への変換は、心内膜輪郭と心外膜輪郭の検出を容易かつ正確にさせる。極座標系において、心内膜の輪郭は直線に近づき、心外膜の輪郭の抽出も容易になる。更に、極座標系において、周方向(水平方向、横軸方向)へ投影した多くの情報(例えば、輝度(通常は画素値により表す)とエッジ等)を用いることができる。
【0060】
ステップS840において、極座標系において取得した左心室の輪郭を対応する元の画像スライスに位置付ける(マッピングする)。左心室において、乳頭筋の影響により、一般に常用されている方法により得られた心内膜の輪郭は小さくなる。従って、乳頭筋の影響を除去し、心内膜の輪郭線が限定する範囲内に乳頭筋を含めることは、左心室の心内膜輪郭を取得する際に重要な処理であり、これにより大きく且つ正確な心内膜輪郭を得る。
【0061】
既存の適切な方法により、極座標系において各画像スライス内の左心室の心内膜輪郭を取得することができる。以下、本実施形態において、極座標系における各画像スライス内の左心室の心内膜輪郭を取得する方法について説明する。
【0062】
本実施形態の一例において、上記の運動対象輪郭抽出方法により時系列3次元画像から左心室の輪郭を抽出し、抽出した輪郭を左心室の初期輪郭とし、画像スライスにおける左心室の初期輪郭の中心を当該画像スライスの極点とする場合、各画像スライスにおける左心室の心内膜輪郭は、当該画像スライスの左心室の初期輪郭を用いて取得することができる。具体的には、各画像スライスにおける極点に基づいて各画像スライスにおける左心室の初期輪郭を極座標系へ変換し、その後、極座標系における各画像スライス内の初期輪郭に対して平滑化処理を行なって、当該画像スライス内の心内膜輪郭を取得する。
【0063】
図10A及び図10Bは、左心室の初期輪郭を極座標系に変換する一例を示す図である。図10Aは、元の画像スライス(オリジナル画像スライス)を示す。同図中、略矩形となる実線の枠は運動領域を示し、略円形の線は、左心室の初期輪郭を示す。図10Bは、図10Aの画像スライスにおける初期輪郭の中心点を極点として、当該画像スライス(元の画像スライス)を極座標系へ変換することで得られた画像を示す。図10Aでは略円形である左心室の初期輪郭は、極座標系においては、略直線となる。なお、輪郭線において突起の部分は、乳頭筋がある部分である。本実施形態の一例では、各種の適切な方法により、極座標系において画像スライスの中の初期輪郭に対して平滑化を行い、乳頭筋の影響を除去して、略直線となる心内膜輪郭を得る。
【0064】
本実施形態の他の一例では、画像スライスの周方向への投影(水平投影)により心内膜輪郭の極座標系における大体の位置を確定し、その後、直線検出法により、画像スライスのエッジ画像の中から心内膜輪郭を取得する。具体的には、各画像スライスの中のエッジを検出し、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影(水平投影)を用いて取得する。そして、極座標系において、左心室の心内膜輪郭の半径付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。左心室の元の画像スライスでは、左心室の心筋のグレイスケールは、左心室内部のグレイスケールより小さくなる。これにより、画像スライスのグレイスケール画像の周方向への投影における画素値が急激に低下する位置を、心内膜輪郭の半径の位置とする。
【0065】
図11は、極座標系における画像スライスのグレイスケール画像の周方向への投影の一例を示す図である。図11において、横座標は、画像スライスのグレイスケール画像における行(row)であり、縦座標は、各行における画素値の和、或いは、各行における画素値の平均値である。精度要求の程度に基づき、1つ、或いは、複数の画素を一単位として、画像スライスは、行に分割される。図11に示すように、画素値の和、或いは、平均値が急激に低下している行の位置を、心内膜輪郭の半径Rendoが存在する位置として決定する。
【0066】
本実施形態の他の一例では、上記の2つの心内膜輪郭取得方法を組み合わせても良い。具体的には、この本実施形態では、各画像スライスにおけるエッジを検出し、極座標系において、各画像スライスの左心室の心内膜輪郭の第1半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。そして、各画像スライスの左心室の心内膜輪郭の第2半径を当該画像スライス内の初期輪郭に基づいて取得する。そして、極座標系において、左心室の心内膜輪郭の第1半径と第2半径との平均位置付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。ここで、適用要求に基づいて、第1半径と第2半径とを加重平均してもよい。
【0067】
上記の心内膜輪郭を取得する実施形態において、上記直線検出法としてハフ変換法を用いることができる。更に、初期輪郭の平滑化処理において、画像スライス内の初期輪郭を、極座標系においてハフ変換法を用いたフィッティング(fitting)を行ない、乳頭筋が心内膜輪郭の範囲内に含まれるような心内膜輪郭を得ても良い。他の方法と比較して、
エッジ画素(エッジ点ともいう)のフィッティングを行なう場合は、ハフ変換法は、大多数のエッジ点を含む輪郭を取得でき、乳頭筋及びノイズ等のエッジ点を排除することができる。その他の方法では、通常、小さい半径のエッジ画素でも考慮され、その結果、乳頭筋の影響を受けやすい。
【0068】
更に、本実施形態に係る左心室画像分離方法の一例では、左心室の心内膜輪郭だけでなく、左心室の心外膜輪郭も取得することができる。左心室の心内膜輪郭と心外膜輪郭とに基づいて、心筋の厚さを決定できる。
【0069】
この実施形態では、画像スライスの周方向への投影により心内膜輪郭のエッジ画素と心筋の厚さを決定して、心外膜輪郭の極座標系における大体の位置を決定する。その後、画像スライスのエッジ画像の中から、カーブフィッティング法により心外膜輪郭を取得する。具体的には、各画像スライスにおけるエッジを検出する。そして、極座標系において、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。そして、極座標系において、各画像スライス内の左心室の心筋の厚さを、当該画像スライスのエッジ画像の周方向への投影と当該画像スライス内の左心室の心内膜輪郭の半径とを用いて決定することで、各画像スライス内の左心室の心外膜輪郭の半径を取得する。そして、極座標系において、左心室の心外膜輪郭の半径付近に位置するエッジから左心室の心外膜輪郭を、カーブフィッティング法を用いて取得する。そして、左心室の心外膜輪郭を対応する元の画像スライスに位置付ける。
【0070】
図12Aは、極座標系における画像スライスのエッジ画像を示す図である。図12Bは、図12Aにおけるエッジ画像の周方向への投影を示す図である。図12Bにおいて、横座標は、画像スライスのエッジ画像における行(row)であり、縦座標は、各行における画素値の和、或いは、各行における画素値の平均値である。精度要求の程度に基づき、1つ、或いは、複数の画素を一単位として、画像スライスは、行に分割される。図12Bに示すように、画素値の和、或いは、平均値が急激に低下している行の位置を、心内膜輪郭の半径Rendoが存在する位置として決定する。エッジ画像において、心内膜輪郭と心外膜輪郭の間の心筋部分は基本的にエッジを含まない。従って、周方向への投影では、心内膜輪郭と心外膜輪郭との間に隙間(gap)が生じる。これにより、図12Bに示すように、心内膜輪郭の半径Rendoの直近に位置する隙間が、心内膜輪郭と心外膜輪郭との間の心筋の厚さとして決定され、この隙間の直後の位置が、心外膜輪郭の半径Repiが存在する位置として決定される。
【0071】
図13Aは、極座標系において取得された心内膜輪郭及び心外膜輪郭を示す図である。図13Aの上の輪郭線は、心内膜輪郭を表し、下の輪郭線は、心外膜輪郭を表す。図13Bは、図13Aで取得された心内膜輪郭及び心外膜輪郭を元の画像スライス上へ変換した図である。図13Bの心内膜輪郭(白抜き円で結ばれた線で示す)は、滑らかであり、突出を含まない。すなわち、乳頭筋の影響は、除去されている。
【0072】
更に、本実施形態の一例では、上記の本実施形態に係る運動対象輪郭抽出方法により、時系列3次元医用画像から、運動対象である左心室の輪郭を、左心室の初期輪郭として抽出する。そして、各画像スライス内の左心室の初期輪郭の中心を、当該画像スライスの極点として確定する。ここで、各時系列画像スライスにおける運動領域の中から左心室の候補領域を識別する場合、左心室の候補領域は、該当する画像スライスの運動領域の複数の画像特徴及び左心室の推定中心位置に基づいて識別される。一例として、運動領域の複数の画像特徴は、2値化後の運動領域における連結領域の複数の特徴である。
【0073】
左心室(LV)の候補領域の自動識別プロセスにおいて、画像スライスが2値化され、画像スライスの連結領域が標識される。全ての連結領域は、様々な形状とサイズとを有する。特に、心尖部と心基部とでは、左心室の候補領域の識別が困難である。心尖部では、LV領域は、小さく、その他の隣接情報を取得できない場合では、心尖部のLV領域は、ノイズのように見える。心基部では、LV領域は、常に右心室(RV)と連結している。この観点から、この実施形態では、運動領域の連結領域の多種画像特徴により、LVの候補領域を識別することができる。これら特徴は、例えば、面積、円形比(circularity ratio)、緊密度(compactness)、矩形度(rectangularity)、偏心度(eccentricity)、重心距離分散(centroid distance variance)を含む。ここで、円形比は、連結領域の形状が円形に近づく程度を示す。緊密度は、連結領域の面積と連結領域の最小境界フレームとの比率を示す。矩形度は、連結領域の高さに対する幅の比、又は、連結領域の幅に対する高さの比を示す。偏心度は、連結領域の主軸の長さと副軸の長さとの比率を示す。重心距離分散は、連結領域のエッジ点から重心までの距離の分散を示す。
【0074】
連結領域の画像特徴に加えて、LVの識別を更に正確とするために、LVの位置も用いても良い。ここで、用手的にマーキングされたLVの中心位置を用いることもできるし、推定したLV中心位置を用いることもできる。具体例として、テンプレートとして予め決定された時系列画像スライスのLVの初期輪郭を用いて、LVの中心位置を推定することができる。典型的には、予めテンプレートとして決定される時系列画像スライスは、全ての時系列画像スライスの中間に位置する時系列画像スライスである。かかる時系列画像スライスでは、LVの形状は、より正常となる。また、識別を補助するために、3次元空間におけるLVの中心線をフィッティングすることもできる。テンプレートとして予め決定された時系列画像スライス内のLVの候補領域は、連結領域の画像特徴を用いて識別することができ、LVの候補領域の中心を、LVの推定中心として算出することができる。
【0075】
LVの推定中心位置が比較的信頼度が高い特徴であることから、一実施形態では、左心室の候補領域を識別する際、左心室の推定中心位置に割り当てる重みを、複数の画像特徴に割り当てる重みより大きくする。
【0076】
(3.運動対象輪郭抽出装置)
以下、図14〜図17を参照して、本実施形態に係る運動対象輪郭抽出装置について説明する。運動対象輪郭抽出装置は、時系列3次元画像から変形運動を行なう運動対象の輪郭を抽出する。時系列3次元画像は、複数の時点で取得された複数の3次元画像を含む。各3次元画像は、互いに平行な複数の2次元の画像スライスで構成される。複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。本実施形態に係る運動対象輪郭抽出装置は、各種の時系列3次元画像から運動対象の輪郭を抽出するために用いることができる。例えば、時系列3次元画像は、医用画像診断装置にて取得された被検体のデータに基づいて生成された時系列に沿った医用画像であるが、これに限定されるものでない。
【0077】
図14は、本実施形態に係る運動対象輪郭抽出装置の一例を示すブロック図である。図14に示すように、運動対象輪郭抽出装置1400は、輪郭取得部1410と輪郭補正部1420とを備える。輪郭取得部1410は、各画像スライス内の運動対象の輪郭を取得する。輪郭補正部1420は、複数の時系列画像スライスそれぞれにおける運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の運動対象の輪郭を補正する。
【0078】
ここで、運動対象の輪郭は、各種の既知の方法により取得される。図15は、本実施形態に係る輪郭取得部の一例を示すブロック図である。図15に示すように、輪郭取得部1500は、運動領域検出部1510、運動領域調整部1520及び運動対象識別部1530を備える。運動領域検出部1510は、各時系列画像スライスにおける運動領域を、当該時系列画像スライスにおける画素値の時間に伴う変化に基づいて検出する。運動領域調整部1520は、時系列3次元画像における所定の時系列画像スライスの運動領域を基準として、時系列3次元画像における他の時系列画像スライスの運動領域を調整する。具体的には、運動領域調整部1520は、図2のステップS220に示す方法により運動領域を調整する。運動対象識別部1530は、各時系列画像スライスにおける運動領域の中から運動対象の候補領域を識別し、当該候補領域の輪郭を運動対象の輪郭とする。
【0079】
本実施形態の一例では、各時系列画像スライスの前記運動領域から抽出された特徴を用いて、運動領域調整部1620において用いられる所定の時系列画像スライスを決定する。図16は、本実施形態に係る輪郭取得部の他の一例を示すブロック図である。図16に示すように、輪郭取得部1600は、運動領域検出部1610、運動領域調整部1620、運動対象識別部1630及び分類部1640を備える。
【0080】
運動領域検出部1610、運動領域調整部1620及び運動対象識別部1630それぞれは、基本的に、図15に示す輪郭取得部1500に含まれる運動領域検出部1510、運動領域調整部1520及び運動対象識別部1530それぞれと同様であるので、ここでは繰り返して説明しない。
【0081】
分類部1640は、各時系列画像スライスの運動領域から抽出される特徴であって、平均画素値、運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、所定の時系列画像スライスを決定する。具体的な例として、分類部1640は、上記の運動対象輪郭抽出方法において記述された機械学習法に基づいて、所定の時系列画像スライスを決定する。
【0082】
本実施形態の他の一例によれば、輪郭取得部は、図16に示す輪郭取得部1600と基本的に同じ構成を有し、分類部(分類部1640)は、各時系列画像スライスの運動領域から抽出される特徴であって、平均画素値、運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、運動対象の両端に対応する2つの時系列画像スライスを決定する。この実施形態においては、輪郭取得部は、2つの時系列画像スライスの間に位置する時系列画像スライスの各画像スライス内の運動対象の輪郭を取得することができる。この実施形態においては、輪郭取得部は、全ての時系列画像スライスに対して運動対象の輪郭を取得するものではない。
【0083】
運動対象の輪郭が取得された後、運動対象の運動傾向情報に基づいて、取得された運動対象の輪郭が補正される。図17は、本実施形態に係る輪郭補正部の一例を示すブロック図である。図17に示すように、輪郭補正部1700は、運動傾向決定部1710、類似度算出部1720及び補正実行部1730を備える。
【0084】
運動傾向決定部1710は、各時系列画像スライスにおける前記運動対象の運動傾向情報を決定する。
【0085】
類似度算出部1720は、各時系列画像スライスにおける運動対象の運動傾向情報と、運動対象の基準運動傾向情報との類似度を算出する。本実施形態の一実施例によれば、類似度算出部1720は、全ての時系列画像スライスにおける運動対象の平均運動傾向情報を基準運動傾向情報として算出する。或いは、類似度算出部1720は、テンプレートとして予め決定された時系列画像スライスにおける運動対象の運動傾向情報を基準運動傾向情報とする。ここで、類似度算出部1720は、上記の図5のステップS520において記載された類似度計算方法(例えば、正規化相関アルゴリズム)により類似度を算出することができる。
【0086】
補正実行部1730は、特定の時系列画像スライスにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、所定の閾値より低い場合、当該特定の時系列画像スライスの各画像スライス内の運動対象の輪郭を補正する。本実施形態の一例では、補正実行部1730は、特定の時系列画像スライスに隣接する時系列画像スライスの各画像スライス内の運動対象の輪郭を用いて、当該特定の時系列画像スライスの各画像スライス内の運動対象の輪郭を補正する。本実施形態の他の一例では、補正実行部1730は、補正後の特定の時系列画像スライスにおける運動対象の運動傾向情報と基準運動傾向情報との類似度が、依然として、所定の閾値より低い場合、当該特定の時系列画像スライスを時系列3次元画像から除く。
【0087】
運動対象輪郭抽出装置における各構成の更に多くの詳細な操作については、上記の本実施形態に係る運動対象輪郭抽出方法で記述した内容を参考にできるので、ここでは繰り返して説明しない。
【0088】
本実施形態に係る運動対象輪郭抽出装置は、運動対象の運動傾向を用いて、運動対象の輪郭を補正することで、運動対象の変形を有利因子へ変換させ、誤った輪郭を決定して除去することを補助する。ここで、受ける干渉が最小の所定の時系列画像スライスの運動領域を基準として、その他の時系列画像スライスの運動領域を調整し、異常である他の時系列画像スライスの干渉の影響を除去することができる。更に、時系列3次元画像において運動対象の両端に対応する2つの時系列画像スライスを決定することにより、運動対象の両端以外に位置する時系列画像スライスに対しては輪郭抽出を実行しないとすることができるので、その結果、演算量を減らすことができ、後段の処理に好ましくない影響が及ぶことを回避することができる。更に、時系列3次元画像における運動対象の両端に対応する2つの時系列画像スライスを、少なくとも一つの運動領域の特徴に基づいて、例えばSVM分類器等の機械学習法により、決定することができる。
【0089】
(4.左心室画像分離装置)
以下、図18〜図21を参照して、本実施形態に係る左心室画像分離装置について説明する。左心室画像分離装置は、時系列3次元医用画像から、左心室の輪郭を取得する。時系列3次元医用画像は、少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む。各3次元画像は、左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成される。複数の3次元画像における同一位置の複数の2次元の画像スライスは、1つの時系列画像スライスを形成する。
【0090】
図18は、本実施形態に係る左心室画像分離装置の一例を示すブロック図である。図18に示すように、左心室画像分離装置1800は、極点取得部1810、座標変換部1820及び心内膜輪郭取得部1830を備える。極点取得部1810は、極座標変換のために、各画像スライス内の極点を取得する。座標変換部1820は、各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換し、心内膜輪郭取得部1830が取得した左心室の輪郭を対応する元の画像スライスに位置付ける(マッピングする)。心内膜輪郭取得部1830は、極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の左心室の輪郭として取得する。
【0091】
極点は、手動によりマーキングされたものでも良いし、既知の技術で適切な方法により確定されるものでも良い。図19は、本実施形態に係る極点取得部の一例を示すブロック図である。図19に示す極点取得部1900は、運動対象輪郭抽出部1910及び極点確定部1920を備える。運動対象輪郭抽出部1910は、時系列3次元医用画像から、運動対象である左心室の輪郭を、左心室の初期輪郭として抽出する。左心室を運動対象とする本実施形態に係る運動対象輪郭抽出装置を用いて、運動対象輪郭抽出部1910が実装される。極点確定部1920は、各画像スライス内の左心室の初期輪郭の中心を、当該画像スライスの極点として確定する。
【0092】
心内膜輪郭取得部1830は、既存の適切な方法により、極座標系において各画像スライス内の左心室の心内膜輪郭を取得することができる。
【0093】
本実施形態の一例では、座標変換部1820は、更に、極点取得部1900の運動対象輪郭抽出部1910が取得した各画像スライス内の左心室の初期輪郭を、各画像スライス内の極点に基づいて極座標系に変換する。心内膜輪郭取得部1830は、更に、極座標系における各画像スライス内の初期輪郭に対して平滑化処理を行なって、当該画像スライス内の心内膜輪郭を取得する。例えば、心内膜輪郭取得部1830は、ハフ変換法により各画像スライスにおける左心室の初期輪郭を平滑化する。これにより、運動対象輪郭抽出部1910が取得した左心室の初期輪郭に基づいて、最終的な心内膜輪郭を取得することができる。
【0094】
本実施形態の他の一例では、心内膜輪郭取得部1830は、画像スライスの周方向への投影を用いて、極座標における心内膜輪郭のおおよその位置を決定することができ、その後、直線検出法を用いて画像スライスのエッジ画像から心内膜輪郭を取得することができる。図20は、本実施形態に係る左心室画像分離装置の他の一例を示すブロック図である。図20に示すように、左心室画像分離装置2000は、極点取得部2010、座標変換部2020、心内膜輪郭取得部2030及びエッジ検出部2040を備える。極点取得部2010及び座標変換部2020は、図18に示す極点取得部1810及び座標変換部1820と、略同様の構成である。エッジ検出部2040は、各画像スライスにおけるエッジを検出する。エッジ検出部2040は、極座標系において各画像スライスのエッジを検出することができ、また、ユークリッド座標系において各画像スライスのエッジを検出して、エッジ画像を極座標系へ変換することもできる。心内膜輪郭取得部2030は、図18に示す心内膜輪郭取得部1830をベースとし、更に、極座標系において、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。そして、心内膜輪郭取得部2030は、極座標系において、左心室の心内膜輪郭の半径付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。
【0095】
本実施形態の他の一例では、本実施形態に係る運動対象輪郭抽出装置により運動対象輪郭抽出部1910を実行する場合、心内膜輪郭取得部2030は、更に、以下の方法により心内膜輪郭を取得することができる。すなわち、心内膜輪郭取得部2030は、極座標系において、各画像スライスの左心室の心内膜輪郭の第1半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。また、心内膜輪郭取得部2030は、各画像スライスの左心室の心内膜輪郭の第2半径を当該画像スライス内の初期輪郭に基づいて取得する。そして、心内膜輪郭取得部2030は、極座標系において、左心室の心内膜輪郭の第1半径と第2半径との平均位置付近に位置するエッジから左心室の心内膜輪郭を、直線検出法を用いて取得する。
【0096】
上記の一例において、心内膜輪郭取得部が用いる直線検出法は、ハフ変換法であっても良い。
【0097】
また、左心室の心外膜輪郭を取得するために、本実施形態に係る左心室画像分離装置は、更に、心外膜輪郭取得部を備えても良い。図21は、本実施形態に係る左心室画像分離装置の更に他の一例を示すブロック図である。図21に示すように、左心室画像分離装置2100は、極点取得部2110、座標変換部2120、心内膜輪郭取得部2130、エッジ検出部2140及び心外膜輪郭取得部2150を備える。ここで、極点取得部2110、座標変換部2120及び心内膜輪郭取得部2130は、図18に示す極点取得部1810、座標変換部1820及び心内膜輪郭取得部1830と基本的に略同じ構成である。エッジ検出部2140は、各画像スライスにおけるエッジを検出する。心外膜輪郭取得部2150は、左心室の心外膜輪郭を取得する。具体的には、心内膜輪郭取得部2130は、極座標系において、各画像スライスの左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得する。心外膜輪郭取得部2150は、極座標系において、各画像スライス内の左心室の心外膜輪郭の半径を、当該画像スライスのエッジ画像の周方向への投影と当該画像スライス内の左心室の心内膜輪郭の半径とを用いて取得する。そして、心外膜輪郭取得部2150は、極座標系において、左心室の心外膜輪郭の半径付近に位置するエッジから前記左心室の心外膜輪郭を、カーブフィッティング法を用いて取得する。また、座標変換部2120は、取得された心外膜輪郭の様子をユーザへ提示するために、更に、左心室の心外膜輪郭を対応する元の画像スライスに位置付ける。
【0098】
更に、本実施形態の他の一例では、本実施形態に係る運動対象輪郭抽出装置により、左心室画像分離装置の極点取得部の運動対象輪郭抽出部を実装する場合、運動対象輪郭抽出装置が有する運動対象認識部は、各時系列画像スライスにおける運動領域の中から前記左心室の候補領域を、当該画像スライスの運動領域の複数の画像特徴及び左心室の推定中心位置に基づいて識別する。左心室の推定中心位置は、複数の画像特徴よりも、大きな重みを付加されても良い。
【0099】
左心室画像分離装置の各構成についての更に多くの詳細な操作については、上記の本実施形態に係る左心室画像分離方法の記述と、上記の本実施形態に係る運動対象輪郭抽出方法における関連記述を参考にできるので、ここでは繰り返して説明しない。
【0100】
本実施形態に係る左心室画像分離装置では、オリジナルの画像スライスを極座標系へ変換し、元々曲線であり、ぼやけていた心内膜輪郭を直線で近似させて、比較的明瞭とする結果、より正確に、画像スライスから左心室を分離することができる。更に、極座標系においてハフ変換等を用いて心内膜の初期輪郭に対して平滑化を行ない、或いは、例えばハフ変換等の直線検出法により心内膜のエッジ画素点から心内膜輪郭をフィッティングし、乳頭筋の影響を除去することができる。また、画像スライスの周方向における投影を利用することにより、心内膜輪郭及び心外膜輪郭のおおよその位置を、更に正確に確定することができる。
【0101】
(5.本実施形態に係る方法/装置を実施可能なコンピュータ構成)
一例として、上述した運動対象輪郭抽出方法の各ステップと、上述した運動対象輪郭抽出装置の各構成モジュール、及び/又は、各構成ユニットとは、医用画像診断装置(例えば、X線診断装置、超音波診断装置、CT装置、MRI装置、PET装置等)のソフトウエア、ファームウエア、ハードウエア、或いは、それらの組み合わせとして、又は、これら医用画像診断装置の中の一部分として実施することができる。一例として、上述した左心室画像分離方法の各ステップと、上述した左心室画像分離装置の各構成モジュール、及び/又は、各構成ユニットとは、医用画像診断装置(例えば、X線診断装置、超音波診断装置、CT装置、MRI装置、PET装置等)のソフトウエア、ファームウエア、ハードウエアあるいはそれらの組み合わせとして、又は、これら医用画像診断装置の中の一部分として実施することができる。一例として、上述した方法及び装置は、既存の医用画像診断装置において、当該医用画像診断装置の各構成部分に対して、ある程度の改良をすることで、実施することができる。他の例として、上述した方法の各ステップと、上述した装置の各構成モジュール、及び/又は、各構成ユニットとは、医用画像診断装置とは独立した装置として実施してもよい。上述した装置の各構成や各ユニットは、ソフトウエア、ファームウエア、ハードウエア、或いは、それらを組み合わせた方式により構成することができるが、用いられる具体的手段や方式は当業者の周知のものであり、ここでは特に述べることはしない。
【0102】
一例として、上述した方法の各ステップと、上述した装置の各構成モジュール、及び/又は、各構成ユニットとは、ソフトウエア、ファームウエア、ハードウエア、或いは、それらの組み合わせとして実施しても良い。上述した方法の各ステップと、上述した装置の各構成モジュール、及び/又は、各構成ユニットとを、ソフトウエア又はファームウエアを介して実現した場合、上述した方法を実施するためのソフトウエアのプログラムは、記憶媒体から、或いは、ネットワークを介して、専用のハードウエア構造のコンピュータ(例えば、図22に示す汎用コンピュータ2200)へ、インストールして構成することができ、該コンピュータに各種プログラムがインストールされた状態で、各種機能等を実施することができる。
【0103】
図22は、本実施形態に係る方法/装置を実現するためのコンピュータの構成例を示すブロック図である。図22において、中央演算処理装置であるCPU2201は、読み出し専用メモリであるROM2202の中に記憶されているプログラム、或いは、記憶部2208から読み書き兼用メモリであるRAM2203へ書き込まれたプログラムに基づいて、各種処理を実行する。RAM2203は、必要に応じて、CPU2201が各種処理等を実行するときに必要なデータも記憶する。CPU2201、ROM2202及びRAM2203は、バス2204を経由して、それぞれ接続されている。入力/出力インターフェース2205も、バス2204に接続されている。
【0104】
以下に記載する各部は、入力/出力インターフェース2205に接続されている。すなわち、入力部2206(キーボード、マウス等を含む)、出力部2207(例えば、ブラウン管(CRT)、液晶モニタ(LCD)等のモニタや、スピーカ等を含む)、記憶部2208(ハードディスク等を含む)、通信部2209(例えば、LANカード、モデム等のネットワークインターフェースカード)である。通信部2209は、ネットワーク(例えば、インターネット)を介して通信処理を実施する。必要に応じて、駆動部2210も入力/出力インターフェース2205に接続可能である。取り外し可能な媒体2211は、例えば、磁気ディスク、光ディスク、MO、半導体メモリ等であって、必要に応じて、駆動部2210に装着される。コンピュータプログラムは、必要に応じて、取り外し可能な媒体2211から読み出され、記憶部2208へインストールされる。
【0105】
ソフトウエアにより、上記の一連の処理を実行する場合、ソフトウエアを構成するプログラムは、インターネット等のネットワーク、或いは、例えば、取り外し可能な媒体2211等の記憶媒体から、インストールされる。
【0106】
当業者には自明であるように、かかる記憶媒体は、内部のプログラムを記憶し、そのプログラムを装置から離れたユーザに提供する取り外し可能な媒体2211に限定されない。取り外し可能な媒体2211の例としては、フロッピー(登録商標)ディスクを含む磁気ディスク、CD−ROMやDVDを含む光ディスク、MiniDisc(登録商標)を含む磁気光ディスク、半導体メモリ等が挙げられる。また、記憶媒体は、ROM2202であっても良く、記憶部2208に含まれるハードディスク等、その中にプログラムが記憶され、それらを含む装置からユーザへプログラムが送られる形態でも良い。
【0107】
本実施形態は、更に、コンピュータが読み取り可能な指示コードを記憶しているプログラムプロダクトを提供する。指示コードが、機器を介して読み取られると、本実施形態に係る方法が実施される。
【0108】
機器読み取り可能なコマンドコードを記憶しているプログラムプロダクトを持ち出すための記憶媒体も本実施形態に適用できる。その記憶媒体は、ハードディスク、光ディスク、磁気光ディスク、メモリカード、メモリスティックが挙げられるが、これらには限定されない。
【0109】
強調すべきは、上記の本実施形態の具体例においては、1つの具体例において記載した、及び/又は、図示した特徴は、同じ方式で、或いは、類似した方式で、1つ、又は、複数の他の具体例で適用したり、他の実施方法における特徴に置き換えたりすることも可能である。
【0110】
更に、上記の説明で、 “包含する/含む”といった用語を使用した時は、特徴・構成・ステップ、或いは、構造の存在を示しているが、その他の特徴・構成・ステップ、或いは、構造の存在や付加の排除を意味するものではない。
【0111】
上記の実施形態においては、数字構成の図番記号を用いて各ステップや構成を表記している。ただし、これらの図番記号は、単に、説明の記載や図面の描写を意図するものであり、その順序や、如何なる他の限定を表すものではない、と当業者は理解すべきである。
【0112】
更に、本実施形態の方法は、詳細な説明の欄において説明された順序に沿って実施されるものに限らず、その他の順序に沿って、並行して、或いは、独立して実施されても良い。従って、本願の詳細な説明において説明された方法の実施順序は、本実施形態の技術範囲に対する構成を制限するものではない。
【0113】
以上、本実施形態によれば、運動段階が異なる各画像内の運動対象の輪郭を正確に取得することができる。
【0114】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0115】
1400 運動対象輪郭抽出装置
1410 輪郭取得部
1420 輪郭補正部
【特許請求の範囲】
【請求項1】
複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する運動対象輪郭抽出装置であって、
各画像スライス内の前記運動対象の輪郭を取得する輪郭取得部と、
複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する輪郭補正部と、
を備えたことを特徴とする運動対象輪郭抽出装置。
【請求項2】
前記輪郭補正部は、
各時系列画像スライスにおける前記運動対象の運動傾向情報を決定する運動傾向決定部と、
各時系列画像スライスにおける前記運動対象の前記運動傾向情報と、前記運動対象の基準運動傾向情報との類似度を算出する類似度算出部と、
特定の時系列画像スライスにおける前記運動対象の前記運動傾向情報と前記基準運動傾向情報との類似度が、所定の閾値より低い場合、当該特定の時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する補正実行部と、
を備えたことを特徴とする請求項1に記載の運動対象輪郭抽出装置。
【請求項3】
前記類似度算出部は、複数の時系列画像スライスにおける前記運動対象の平均運動傾向情報を前記基準運動傾向情報として算出する、又は、テンプレートとして予め決定された時系列画像スライスにおける前記運動対象の運動傾向情報を前記基準運動傾向情報とすることを特徴とする請求項2に記載の運動対象輪郭抽出装置。
【請求項4】
前記類似度算出部は、正規化相互相関アルゴリズムにより前記類似度を算出することを特徴とする請求項2に記載の運動対象輪郭抽出装置。
【請求項5】
前記補正実行部は、前記特定の時系列画像スライスに隣接する時系列画像スライスの各画像スライス内の前記運動対象の輪郭を用いて、当該特定の時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正することを特徴とする請求項2に記載の運動対象輪郭抽出装置。
【請求項6】
前記補正実行部は、更に、補正後の前記特定の時系列画像スライスにおける前記運動対象の前記運動傾向情報と前記基準運動傾向情報との類似度が、前記所定の閾値より低い場合、当該特定の時系列画像スライスを前記時系列3次元画像から除くことを特徴とする請求項5に記載の運動対象輪郭抽出装置。
【請求項7】
前記輪郭取得部は、更に、
各時系列画像スライスにおける運動領域を、当該時系列画像スライスにおける画素値の時間に伴う変化に基づいて検出する運動領域検出部と、
前記時系列3次元画像における所定の時系列画像スライスの運動領域を基準として、前記時系列3次元画像における他の時系列画像スライスの運動領域を調整する運動領域調整部と、
各時系列画像スライスにおける運動領域の中から前記運動対象の候補領域を識別し、当該候補領域の輪郭を前記運動対象の輪郭とする運動対象識別部と、
を備えることを特徴とする請求項1に記載の運動対象輪郭抽出装置。
【請求項8】
前記輪郭取得部は、更に、
各時系列画像スライスの前記運動領域から抽出される特徴であって、平均画素値、前記運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び前記運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、前記所定の時系列画像スライスを決定する分類部、
を備えることを特徴とする請求項7に記載の運動対象輪郭抽出装置。
【請求項9】
前記輪郭取得部は、更に、
各時系列画像スライスの前記運動領域から抽出される特徴であって、平均画素値、前記運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び前記運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、前記運動対象の両端に対応する2つの時系列画像スライスを決定する分類部、
を備え、
前記輪郭取得部は、前記2つの時系列画像スライスの間に位置する時系列画像スライスの各画像スライス内の前記運動対象の輪郭を取得することを特徴とする請求項7に記載の運動対象輪郭抽出装置。
【請求項10】
前記時系列3次元画像は、医用画像診断装置により取得されたデータにより生成された時系列医用画像であることを特徴とする請求項1〜9のいずれか1つに記載の運動対象輪郭抽出装置。
【請求項11】
少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する左心室画像分離装置であって、
極座標変換のために、各画像スライス内の極点を取得する極点取得部と、
各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換する座標変換部と、
前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得する心内膜輪郭取得部と、
を備え、
前記座標変換部は、前記心内膜輪郭取得部が前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付けることを特徴とする左心室画像分離装置。
【請求項12】
前記極点取得部は、
前記時系列3次元医用画像から、運動対象である前記左心室の輪郭を、前記左心室の初期輪郭として抽出する運動対象輪郭抽出装置と、
各画像スライス内の前記左心室の初期輪郭の中心を、当該画像スライスの前記極点として確定する極点確定部と、
を備えたことを特徴とする請求項11に記載の左心室画像分離装置。
【請求項13】
前記座標変換部は、各画像スライス内の前記初期輪郭を、当該画像スライス内の前記極点に基づいて前記極座標系に変換し、
前記心内膜輪郭取得部は、前記極座標系における各画像スライス内の前記初期輪郭に対して平滑化処理を行なって、当該画像スライス内の前記心内膜輪郭を取得することを特徴とする請求項12に記載の左心室画像分離装置。
【請求項14】
各画像スライスにおけるエッジを検出するエッジ検出部
を更に備え、
前記心内膜輪郭取得部は、
前記極座標系において、各画像スライスの前記左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得し、
前記極座標系において、前記左心室の心内膜輪郭の半径付近に位置するエッジから前記左心室の心内膜輪郭を、直線検出法を用いて取得することを特徴とする請求項11に記載の左心室画像分離装置。
【請求項15】
各画像スライスにおけるエッジを検出するエッジ検出部
を更に備え、
前記心内膜輪郭取得部は、
前記極座標系において、各画像スライスの前記左心室の心内膜輪郭の第1半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得し、
各画像スライスの前記左心室の心内膜輪郭の第2半径を当該画像スライス内の前記初期輪郭に基づいて取得し、
前記極座標系において、前記左心室の心内膜輪郭の第1半径と第2半径との平均位置付近に位置するエッジから前記左心室の心内膜輪郭を、直線検出法を用いて取得することを特徴とする請求項12に記載の左心室画像分離装置。
【請求項16】
前記心内膜輪郭取得部は、前記極座標系において、各画像スライスの前記左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得し、
前記左心室画像分離装置は、
各画像スライスにおけるエッジを検出するエッジ検出部と、
前記極座標系において、各画像スライス内の前記左心室の心外膜輪郭の半径を、当該画像スライスのエッジ画像の周方向への投影と当該画像スライス内の前記左心室の心内膜輪郭の半径とを用いて取得し、かつ、前記極座標系において、前記左心室の心外膜輪郭の半径付近に位置するエッジから前記左心室の心外膜輪郭を、カーブフィッティング法を用いて取得する心外膜輪郭取得部と、
を更に備え、
前記座標変換部は、前記左心室の心外膜輪郭を対応する元の画像スライスに位置付けることを特徴とする請求項11に記載の左心室画像分離装置。
【請求項17】
前記運動対象輪郭抽出装置は、前記運動対象の運動傾向情報として、前記左心室の面積の時間に伴う変化、前記左心室の半径の時間に伴う変化、及び前記左心室の周囲長の時間に伴う変化の少なくとも1つを用いることを特徴とする請求項12に記載の左心室画像分離装置。
【請求項18】
前記極点取得部は、
前記時系列3次元医用画像から、運動対象である前記左心室の輪郭を、前記左心室の初期輪郭として抽出する運動対象輪郭抽出装置と、
各画像スライス内の前記左心室の初期輪郭の中心を、当該画像スライスの前記極点として確定する極点確定部と、
を備え、
前記運動対象輪郭抽出装置は、各時系列画像スライスにおける運動領域の中から前記左心室の候補領域を、当該画像スライスの運動領域の複数の画像特徴及び前記左心室の推定中心位置に基づいて識別することを特徴とする請求項11に記載の左心室画像分離装置。
【請求項19】
前記運動対象輪郭抽出装置は、前記左心室の候補領域を識別する際、前記左心室の推定中心位置に割り当てる重みを、前記複数の画像特徴に割り当てる重みより大きくすることを特徴とする請求項18に記載の左心室画像分離装置。
【請求項20】
複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する運動対象輪郭抽出方法であって、
各画像スライス内の前記運動対象の輪郭を取得し、
複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する、
ことを含む運動対象輪郭抽出方法。
【請求項21】
少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する左心室画像分離方法であって、
極座標変換のために、各画像スライス内の極点を取得し、
各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換し、
前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得し、
前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付ける、
ことを含む左心室画像分離方法。
【請求項1】
複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する運動対象輪郭抽出装置であって、
各画像スライス内の前記運動対象の輪郭を取得する輪郭取得部と、
複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する輪郭補正部と、
を備えたことを特徴とする運動対象輪郭抽出装置。
【請求項2】
前記輪郭補正部は、
各時系列画像スライスにおける前記運動対象の運動傾向情報を決定する運動傾向決定部と、
各時系列画像スライスにおける前記運動対象の前記運動傾向情報と、前記運動対象の基準運動傾向情報との類似度を算出する類似度算出部と、
特定の時系列画像スライスにおける前記運動対象の前記運動傾向情報と前記基準運動傾向情報との類似度が、所定の閾値より低い場合、当該特定の時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する補正実行部と、
を備えたことを特徴とする請求項1に記載の運動対象輪郭抽出装置。
【請求項3】
前記類似度算出部は、複数の時系列画像スライスにおける前記運動対象の平均運動傾向情報を前記基準運動傾向情報として算出する、又は、テンプレートとして予め決定された時系列画像スライスにおける前記運動対象の運動傾向情報を前記基準運動傾向情報とすることを特徴とする請求項2に記載の運動対象輪郭抽出装置。
【請求項4】
前記類似度算出部は、正規化相互相関アルゴリズムにより前記類似度を算出することを特徴とする請求項2に記載の運動対象輪郭抽出装置。
【請求項5】
前記補正実行部は、前記特定の時系列画像スライスに隣接する時系列画像スライスの各画像スライス内の前記運動対象の輪郭を用いて、当該特定の時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正することを特徴とする請求項2に記載の運動対象輪郭抽出装置。
【請求項6】
前記補正実行部は、更に、補正後の前記特定の時系列画像スライスにおける前記運動対象の前記運動傾向情報と前記基準運動傾向情報との類似度が、前記所定の閾値より低い場合、当該特定の時系列画像スライスを前記時系列3次元画像から除くことを特徴とする請求項5に記載の運動対象輪郭抽出装置。
【請求項7】
前記輪郭取得部は、更に、
各時系列画像スライスにおける運動領域を、当該時系列画像スライスにおける画素値の時間に伴う変化に基づいて検出する運動領域検出部と、
前記時系列3次元画像における所定の時系列画像スライスの運動領域を基準として、前記時系列3次元画像における他の時系列画像スライスの運動領域を調整する運動領域調整部と、
各時系列画像スライスにおける運動領域の中から前記運動対象の候補領域を識別し、当該候補領域の輪郭を前記運動対象の輪郭とする運動対象識別部と、
を備えることを特徴とする請求項1に記載の運動対象輪郭抽出装置。
【請求項8】
前記輪郭取得部は、更に、
各時系列画像スライスの前記運動領域から抽出される特徴であって、平均画素値、前記運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び前記運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、前記所定の時系列画像スライスを決定する分類部、
を備えることを特徴とする請求項7に記載の運動対象輪郭抽出装置。
【請求項9】
前記輪郭取得部は、更に、
各時系列画像スライスの前記運動領域から抽出される特徴であって、平均画素値、前記運動領域の2値化画像におけるホワイト領域比率、画像スライス索引及び前記運動領域の2値化画像における複数のサブ領域におけるホワイト領域比率の少なくとも1つの特徴を用いて、前記運動対象の両端に対応する2つの時系列画像スライスを決定する分類部、
を備え、
前記輪郭取得部は、前記2つの時系列画像スライスの間に位置する時系列画像スライスの各画像スライス内の前記運動対象の輪郭を取得することを特徴とする請求項7に記載の運動対象輪郭抽出装置。
【請求項10】
前記時系列3次元画像は、医用画像診断装置により取得されたデータにより生成された時系列医用画像であることを特徴とする請求項1〜9のいずれか1つに記載の運動対象輪郭抽出装置。
【請求項11】
少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する左心室画像分離装置であって、
極座標変換のために、各画像スライス内の極点を取得する極点取得部と、
各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換する座標変換部と、
前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得する心内膜輪郭取得部と、
を備え、
前記座標変換部は、前記心内膜輪郭取得部が前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付けることを特徴とする左心室画像分離装置。
【請求項12】
前記極点取得部は、
前記時系列3次元医用画像から、運動対象である前記左心室の輪郭を、前記左心室の初期輪郭として抽出する運動対象輪郭抽出装置と、
各画像スライス内の前記左心室の初期輪郭の中心を、当該画像スライスの前記極点として確定する極点確定部と、
を備えたことを特徴とする請求項11に記載の左心室画像分離装置。
【請求項13】
前記座標変換部は、各画像スライス内の前記初期輪郭を、当該画像スライス内の前記極点に基づいて前記極座標系に変換し、
前記心内膜輪郭取得部は、前記極座標系における各画像スライス内の前記初期輪郭に対して平滑化処理を行なって、当該画像スライス内の前記心内膜輪郭を取得することを特徴とする請求項12に記載の左心室画像分離装置。
【請求項14】
各画像スライスにおけるエッジを検出するエッジ検出部
を更に備え、
前記心内膜輪郭取得部は、
前記極座標系において、各画像スライスの前記左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得し、
前記極座標系において、前記左心室の心内膜輪郭の半径付近に位置するエッジから前記左心室の心内膜輪郭を、直線検出法を用いて取得することを特徴とする請求項11に記載の左心室画像分離装置。
【請求項15】
各画像スライスにおけるエッジを検出するエッジ検出部
を更に備え、
前記心内膜輪郭取得部は、
前記極座標系において、各画像スライスの前記左心室の心内膜輪郭の第1半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得し、
各画像スライスの前記左心室の心内膜輪郭の第2半径を当該画像スライス内の前記初期輪郭に基づいて取得し、
前記極座標系において、前記左心室の心内膜輪郭の第1半径と第2半径との平均位置付近に位置するエッジから前記左心室の心内膜輪郭を、直線検出法を用いて取得することを特徴とする請求項12に記載の左心室画像分離装置。
【請求項16】
前記心内膜輪郭取得部は、前記極座標系において、各画像スライスの前記左心室の心内膜輪郭の半径を当該画像スライスのグレイスケール画像の周方向への投影を用いて取得し、
前記左心室画像分離装置は、
各画像スライスにおけるエッジを検出するエッジ検出部と、
前記極座標系において、各画像スライス内の前記左心室の心外膜輪郭の半径を、当該画像スライスのエッジ画像の周方向への投影と当該画像スライス内の前記左心室の心内膜輪郭の半径とを用いて取得し、かつ、前記極座標系において、前記左心室の心外膜輪郭の半径付近に位置するエッジから前記左心室の心外膜輪郭を、カーブフィッティング法を用いて取得する心外膜輪郭取得部と、
を更に備え、
前記座標変換部は、前記左心室の心外膜輪郭を対応する元の画像スライスに位置付けることを特徴とする請求項11に記載の左心室画像分離装置。
【請求項17】
前記運動対象輪郭抽出装置は、前記運動対象の運動傾向情報として、前記左心室の面積の時間に伴う変化、前記左心室の半径の時間に伴う変化、及び前記左心室の周囲長の時間に伴う変化の少なくとも1つを用いることを特徴とする請求項12に記載の左心室画像分離装置。
【請求項18】
前記極点取得部は、
前記時系列3次元医用画像から、運動対象である前記左心室の輪郭を、前記左心室の初期輪郭として抽出する運動対象輪郭抽出装置と、
各画像スライス内の前記左心室の初期輪郭の中心を、当該画像スライスの前記極点として確定する極点確定部と、
を備え、
前記運動対象輪郭抽出装置は、各時系列画像スライスにおける運動領域の中から前記左心室の候補領域を、当該画像スライスの運動領域の複数の画像特徴及び前記左心室の推定中心位置に基づいて識別することを特徴とする請求項11に記載の左心室画像分離装置。
【請求項19】
前記運動対象輪郭抽出装置は、前記左心室の候補領域を識別する際、前記左心室の推定中心位置に割り当てる重みを、前記複数の画像特徴に割り当てる重みより大きくすることを特徴とする請求項18に記載の左心室画像分離装置。
【請求項20】
複数の時点で取得された複数の3次元画像を含む時系列3次元画像であり、各3次元画像が互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元画像から、変形運動を行なう運動対象の輪郭を抽出する運動対象輪郭抽出方法であって、
各画像スライス内の前記運動対象の輪郭を取得し、
複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する、
ことを含む運動対象輪郭抽出方法。
【請求項21】
少なくとも1心周期の期間の複数の時点で取得された複数の3次元画像を含む時系列3次元医用画像であり、各3次元画像が左心室の長軸と交差する互いに平行な複数の2次元の画像スライスで構成され、前記複数の3次元画像における同一位置の複数の2次元の画像スライスが1つの時系列画像スライスを形成している時系列3次元医用画像から、左心室の輪郭を取得する左心室画像分離方法であって、
極座標変換のために、各画像スライス内の極点を取得し、
各画像スライス内の前記極点に基づいて当該画像スライスを極座標系へ変換し、
前記極座標系における各画像スライス内の心内膜輪郭を、当該画像スライス内の前記左心室の輪郭として取得し、
前記極座標系において取得した前記左心室の輪郭を対応する元の画像スライスに位置付ける、
ことを含む左心室画像分離方法。
【図1】

【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12A】
【図12B】
【図13A】

【図13B】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図10A】
【図10B】

【図11】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12A】
【図12B】
【図13A】
【図13B】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図10A】
【図10B】
【図11】
【公開番号】特開2013−22463(P2013−22463A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2012−159856(P2012−159856)
【出願日】平成24年7月18日(2012.7.18)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成24年7月18日(2012.7.18)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]