
運動強度推定システム
【課題】本発明は、運動強度推定システムに関し、運動実施者への携帯機の装着身体部位についてポジションフリーでの運動強度推定を実現しつつ、各センサ装着身体部位での運動強度の推定精度を向上させることにある。
【解決手段】運動実施者の身体に生ずる運動を検知する運動センサを備え、該運動センサによる検知結果に基づいて運動実施者の運動強度を推定する運動強度推定システムにおいて、運動センサが装着され得る身体部位ごとに学習された、運動強度を示すパラメータとしての複数の特徴量と運動強度のクラスとの関係を学習値記憶手段に記憶し、運動センサによる検知結果から各特徴量をそれぞれ抽出し、運動センサが装着される身体部位を特定し、そして、その抽出される各特徴量及びその特定される運動センサが装着される身体部位に基づいて、学習値記憶手段に記憶されている関係に従って運動強度を推定する。
【解決手段】運動実施者の身体に生ずる運動を検知する運動センサを備え、該運動センサによる検知結果に基づいて運動実施者の運動強度を推定する運動強度推定システムにおいて、運動センサが装着され得る身体部位ごとに学習された、運動強度を示すパラメータとしての複数の特徴量と運動強度のクラスとの関係を学習値記憶手段に記憶し、運動センサによる検知結果から各特徴量をそれぞれ抽出し、運動センサが装着される身体部位を特定し、そして、その抽出される各特徴量及びその特定される運動センサが装着される身体部位に基づいて、学習値記憶手段に記憶されている関係に従って運動強度を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運動強度推定システムに係り、特に、運動を実施する者の運動強度を推定するうえで好適な運動強度推定システムに関する。
【背景技術】
【0002】
従来、運動を実施する運動実施者の運動強度を推定する機器が知られている(例えば、特許文献1参照)。この機器は、運動実施者の運動を検知するための運動センサと、運動センサからの信号を処理するマイクロコンピュータと、を備えている。この機器において、マイクロコンピュータは、運動センサからの運動検知データに基づいて運動実施者の運動強度を推定する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−57514号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記した運動強度を推定する機器は、運動実施者の身体に装着されるものである。機器の装着位置は、腰部(例えばベルト装着)や胸部(例えばシャツの胸ポケットの中),腕部(例えば腕回り装着),脚部(例えばズボンのポケットや靴の中)など様々であるが、いわゆる機器を身体の様々な部位に装着しても運動強度を推定できる(いわゆるポジションフリーを実現できる)機器が存在する。
【0005】
しかし、一般的に、運動強度を最も精度よく推定できる機器の装着位置は運動実施者の腰部であり、機器を腰部に装着すれば最も精度よく運動強度を推定することはできるが、一方、ポジションフリーの機器がポケットの中など移動や回転が許容される部位に装着されると、その移動や回転に起因して運動強度の推定精度が低下するおそれがある。
【0006】
本発明は、上述の点に鑑みてなされたものであり、ポジションフリーでの運動強度推定を実現しつつ、各装着部位での運動強度の推定精度を向上させることが可能な運動強度推定システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的は、運動実施者の身体に生ずる運動を検知する運動センサを備え、該運動センサによる検知結果に基づいて運動実施者の運動強度を推定する運動強度推定システムであって、前記運動センサが装着され得る身体部位ごとに学習された、前記運動強度を示すパラメータとしての複数の特徴量と前記運動強度のクラスとの関係を記憶する学習値記憶手段と、前記運動センサによる検知結果から前記各特徴量をそれぞれ抽出する特徴量抽出手段と、前記運動センサが装着される身体部位を特定する装着部位特定手段と、前記特徴量抽出手段により抽出される前記各特徴量、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記学習値記憶手段に記憶されている前記関係に従って、前記運動強度を推定する推定手段と、を備える運動強度推定システムにより達成される。
【0008】
この態様の発明において、運動強度を示すパラメータとしての複数の特徴量と運動強度クラスとの関係は、運動センサが装着され得る身体部位ごとに学習されて学習値記憶手段に記憶される。そして、運動実施者の運動強度は、運動センサによる検知結果から抽出される各特徴量及びその運動センサが装着される身体部位に基づいて、その学習値記憶手段に記憶される関係を参照して推定される。かかる構成によれば、ポジションフリーでの運動強度推定を実現しつつ、各装着部位での運動強度の推定精度を向上させることができる。
【0009】
ところで、上記した運動強度推定システムにおいて、前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果と、教師データと、に基づいて、前記運動センサが装着され得る身体部位ごとの前記学習値記憶手段に記憶される前記関係を学習する学習手段を備えることとしてもよい。
【0010】
この態様の発明において、運動強度を示すパラメータとしての複数の特徴量と運動強度クラスとの関係は、複数の識別器による識別結果と、教師データと、に基づいて学習される。このため、運動強度を推定するうえで行われる各特徴量の識別を運動強度に合わせた最適なものとすることができる。従って、本発明によれば、運動実施者の運動強度の推定を精度よく実現することができる。
【0011】
また、上記した運動強度推定システムにおいて、前記推定手段は、前記特徴量抽出手段により抽出される前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記運動強度を推定することとしてもよい。
【0012】
この態様の発明において、運動強度を示すパラメータとしての複数の特徴量はそれぞれ識別器により二値的に識別される。このため、各特徴量の識別自体を簡易に行うことができる。また、その複数の特徴量の識別結果を組み合わせれば、運動実施者の運動強度の推定精度を向上させることができる。従って、本発明によれば、運動実施者の運動強度の推定を簡易な構成でかつ精度よく実現することができる。
【発明の効果】
【0013】
本発明によれば、ポジションフリーでの運動強度推定を実現しつつ、各装着部位での運動強度の推定精度を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施例である運動強度推定システムの構成図である。
【図2】本実施例の運動強度推定システムにおいて用いられる複数の特徴量と運動強度クラスとの関係マップの一例を表した図である。
【図3】本実施例の運動強度推定システムにおいて実行される制御ルーチンの一例のフローチャートである。
【図4】本実施例の運動強度推定システムにおいて行われる学習の構成図である。
【図5】本実施例の運動強度推定システムにおいてAdaBoostにより学習を行ううえでの基本概念図である。
【発明を実施するための形態】
【0015】
以下、図面を用いて、本発明の具体的な実施の形態について説明する。
【0016】
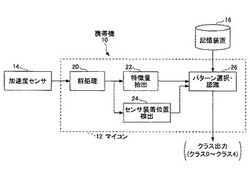
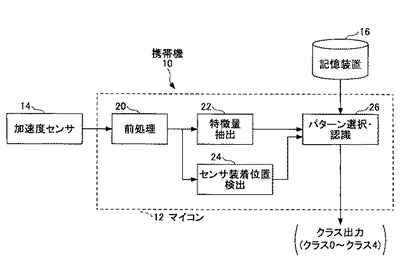
図1は、本発明の一実施例である運動強度推定システムの構成図を示す。本実施例の運動強度推定システムは、運動を実施する運動実施者の運動強度(運動量)を推定するシステムである。本実施例において、推定する運動実施者の運動強度は、安静状態、散歩などのゆっくりした歩行、通常の歩行、速歩、トレーニング運動などの複数のクラス(例えば、5クラス)に分類される。
【0017】
本実施例において、運動強度推定システムは、運動実施者に携帯される携帯機10を備えている。携帯機10は、運動実施者の腰部ベルトやシャツの胸ポケット,ズボンのポケット等の何れの身体部位にも装着可能なポジションフリーの機器である。携帯機10は、各種処理を行うマイクロコンピュータ12と、加速度センサ14と、を備えている。マイクロコンピュータ12と加速度センサ14とは電気的に接続されており、マイクロコンピュータ12は、予め定められたプログラムに従って動作し、主に、加速度センサ14から出力される信号に基づいて運動実施者の運動強度を推定する処理を行う。
【0018】
加速度センサ14は、互いに直交する三軸それぞれ(三次元空間)に生ずる加速度に応じた信号を出力するセンサである。加速度センサ14は、例えば、半導体ウェハ上に加速度成分を取り出す機械的な機構と集積回路とを一体化したデバイスであって、ピエゾ抵抗型や圧電型,静電容量型,磁気センサ型などにより構成されている。加速度センサ14の出力信号は、マイクロコンピュータ12に供給される。マイクロコンピュータ12は、加速度センサ14の出力を所定のサンプリング周波数でサンプリングして、運動強度を示すパラメータとしての複数(N個;例えば4個)の特徴量を抽出し、それらの各特徴量に基づいて運動実施者の運動強度を推定する。
【0019】
尚、運動強度を示すパラメータとしての特徴量としては、加速度の所定時間内における平均値,最大値,最小値,標準偏差などである。また、運動強度を推定するうえで用いる特徴量は、三軸加速度データから求められるノルム(ベクトル方向の距離を表す。)、及び、三軸加速度データの中で最も出力の強い軸のデータによるものである。
【0020】
マイクロコンピュータ12は、運動実施者の運動強度を推定するうえで参照すべき関係マップを記憶する記憶装置16を有している。記憶装置16に記憶される関係マップは、上記した複数の特徴量と運動強度のクラスとの関係を示すものであり、後述の如く、加速度センサ14が装着され得る人の身体部位ごとに学習されたものである。すなわち、加速度センサ14が装着され得る人の身体部位別に、上記した複数の特徴量と運動強度のクラスとの関係が記憶装置16に記憶される。
【0021】
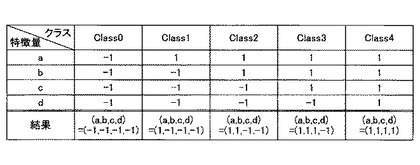
図2は、本実施例の運動強度推定システムにおいて用いられる複数の特徴量と運動強度クラスとの関係マップの一例を表した図を示す。尚、複数の特徴量と運動強度クラスとの関係マップは、各特徴量がそれぞれ閾値処理により二値的に識別された場合の特徴パターン("−1"又は"+1")と運動強度クラスとの関係を示すものであればよい。例えば、運動強度クラスがクラス0〜クラス4までの5クラスある場合、特徴量の数は4個あれば十分であり、図2に示す如く、ある特徴量aの閾値によりクラス0とクラス1とを切り分け、別の特徴量bの閾値によりクラス1とクラス2とを切り分け、特徴量cの閾値によりクラス2とクラス3とを切り分け、そして、特徴量dの閾値によりクラス3とクラス4とを切り分けるようにすればよい。
【0022】
また、複数の特徴量と運動強度クラスとの関係の初期値は、予め実験的に定められた一般的なものであってもよく、また、予め運動実施者自身に指示した運動に対して得られるもの(例えば、運動強度クラスが既知である所定のリズムで歩行させる運動を運動実施者に行わせたときに加速度センサ14の出力から得られる各特徴量と、その運動の運動強度クラスとの関係)であってもよい。
【0023】
更に、関係マップの学習は、医療機関側や運動強度の推定に信頼性の高い機器側と運動実施者の携帯機10とを遠隔的に通信接続して、その医療機関側などから送られるデータを書き込んだものであってもよく、また、初期値と同じように、所定期間(例えば一週間)ごとに運動実施者自身に指示した運動に対して得られるもの(例えば、運動強度クラスが既知である所定のリズムで歩行させる運動を運動実施者に行わせたときに加速度センサ14の出力から得られる各特徴量と、その運動の運動強度クラスとの関係)であってもよい。また、この学習は、携帯機10が装着され得る身体部位ごとに行われる。
【0024】
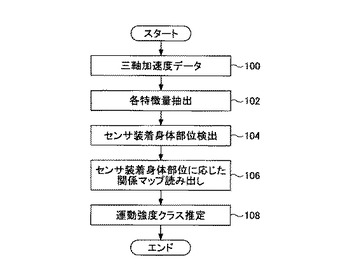
次に、図3を参照して、本実施例の運動強度推定システムにおいてマイクロコンピュータ12が運動実施者の運動強度を推定する手法について説明する。図3は、本実施例の運動強度推定システムにおいて実行される制御ルーチンの一例のフローチャートを示す。
【0025】
本実施例において、マイクロコンピュータ12は、前処理部20、特徴量抽出部22、装着位置検出部24、及びパターン選択・認識部26を有している。前処理部20には、加速度センサ14が接続されており、加速度センサ14からの加速度データが入力される(ステップ100)。前処理部20は、加速度センサ14からの加速度データをフィルタ処理してノイズ除去を行う。
【0026】
特徴量抽出部22には、前処理部20が接続されており、前処理部20からのノイズ除去後の加速度データが入力される。特徴量抽出部22は、前処理部20からの加速度データから複数種類の特徴量をそれぞれ抽出する(ステップ102)。これらの特徴量は、上記の如く、三軸加速度データから求められるノルム及び三軸加速度データの中で最も出力の強い軸のデータによるものであって、加速度の所定時間内における平均値,最大値,最小値,標準偏差などである。
【0027】
また、装着位置検出部24には、前処理部20が接続されており、前処理部20からのノイズ除去後の加速度データが入力される。装着位置検出部24は、前処理部20からの加速度データを処理して、その加速度センサ14すなわち携帯機10が何れの身体部位(例えば、予め定められた腰部や胸部,脚部など)に装着されているかを判定する(ステップ104)。尚、装着位置検出部24による装着位置判定は、予め用意された身体部位別の加速度データの時間変化などの特徴パターンに基づいて行われる。
【0028】
パターン選択・認識部26には、上記した特徴量抽出部22及び装着位置検出部24が接続されており、特徴量抽出部22からの複数種類の特徴量及び装着位置検出部24からのセンサ装着身体部位の情報が入力される。パターン選択・認識部26には、また、加速度センサ14が装着され得る人の身体部位別に複数種類の特徴量と運動強度クラスとの関係マップを記憶する記憶装置16が接続されており、記憶装置16からのその関係情報が読み出される。
【0029】
パターン選択・認識部26は、特徴量抽出部22からの複数種類の特徴量、及び、装着位置検出部24からのセンサ装着身体部位の情報に基づいて、記憶装置16に記憶される複数種類の特徴量と運動強度クラスとの関係マップに従って、運動実施者の運動強度を推定する。
【0030】
具体的には、まず、装着位置検出部24からのセンサ装着身体部位の情報を基に、記憶装置16に記憶されている身体部位別の複数種類の特徴量と運動強度クラスとの関係マップのうちから、そのセンサ装着身体部位に対応する関係マップを選択する(ステップ106)。次に、特徴量抽出部22からの複数種類の特徴量を、その選択した関係マップに従って閾値処理することで、運動強度クラス(クラス0〜クラス4)を推定する(ステップ108)。
【0031】
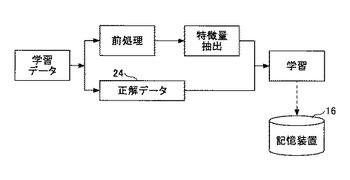
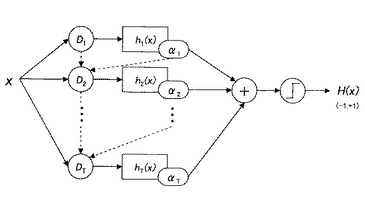
次に、図4及び図5を参照して、本実施例の運動強度推定システムに用いる記憶装置16に記憶される関係マップの学習について説明する。図4は、本実施例の運動強度推定システムにおいて行われる学習の構成図を示す。また、図5は、本実施例の運動強度推定システムにおいてAdaBoostにより学習を行ううえでの基本概念図を示す。
【0032】
本実施例において、マイクロコンピュータ12は、運動実施者の運動強度を推定するのに用いるAdaBoost30を有している。AdaBoost30は、複数(N個;例えば4個)の識別器32を有している。これら複数の識別器32には、加速度センサ14の出力から抽出される複数の特徴量の情報が入力される。特徴量と識別器32とは、一対一で対応する。
【0033】
AdaBoost30の各識別器32はそれぞれ、対応して入力される加速度センサ14からの特徴量を、記憶装置16から読み出したセンサ装着身体部位に対応する上記の関係マップに従って二値的に閾値処理する(例えば、特徴量が閾値以下であるときはそのことを示す"−1"を出力し、一方、特徴量が閾値を超えるときはそのことを示す"+1"を出力する。)。AdaBoost30は、各特徴量をそれぞれ識別器32で二値識別して、その各識別結果を組み合わせた特徴パターンを形成する。そして、その特徴パターンを、記憶装置16から読み出したセンサ装着身体部位に対応する上記の関係マップに照らし合わせることにより、上記した運動実施者の運動強度クラスの推定を行う。
【0034】
また、AdaBoost30は、多段階分割・追加学習型分析手法を適用したパターン認識のための学習アルゴリズムである。AdaBoost30による学習は、加速度センサ14の装着され得る身体部位ごと及び特徴量の種類ごとに、逐次的に学習データの重み(信頼度α)を変化させながら異なる識別器を作り、これら複数(T個)の識別器(弱識別器ht)の重み付け多数決によって最終的な識別関数(強識別器H)を与えるものである。すなわち、AdaBoost30は、加速度センサ14の装着され得る身体部位ごと及び特徴量の種類ごとに、T個の弱識別器htと、それらの弱識別器htの出力が入力される一つの強識別器Hと、を有している。AdaBoost30による学習結果は、記憶装置16に記憶される。
【0035】
AdaBoost30は、単純でかつ識別力の比較的弱い弱識別器htを逐次的に学習して強識別器Hを生成し、識別器としての精度を増強する。すなわち、n個の入力xi∈Xとその入力xiに対する正解yi∈Y={±1}との組(=(x1,y1),・・・,(xn,yn))を学習データとして用い、T個の弱識別器ht(x)(t=1,2,・・・,T)を、信頼度αtで重み付けをして結合することにより強識別器H(x)を構成する。強識別器H(x)は、入力されるT個の弱識別器ht(x)からの各出力を信頼度αで重み付けをして結合することにより、最終的な識別を行う(例えば、特徴量が閾値以下であるときはそのことを示す"−1"を出力し、一方、特徴量が閾値を超えるときはそのことを示す"+1"を出力する。)。
【0036】
尚、学習データの正解yi(教師データ)は、例えば、識別結果としての出力について信頼性の比較的高い製品(例えば、運動実施者への装着部位が腰部に限定される一軸加速度センサ搭載の携帯機;株式会社スズケン製の商品(商品名=ライフコーダ))を被験者に装着したときにその製品での識別結果として出力されるものを用い、或いは、予め正解yiが与えられた運動を被験者に行わせたときのその正解yiを用いる。また、この被験者は、運動強度の推定精度を向上させるうえで運動実施者自身であることが望ましい。
【0037】
AdaBoost30は、t回目の学習における入力xiの重みをDt(i)とし、その重みの初期値をすべての入力について一様の値D1(i)=1/Nとしたうえで、各回において正しく識別できなかった入力データの重みを大きくし正しく識別できたデータの重みを小さくすることにより、前回正しく識別できなかった入力データを次の回において重点的に学習する。すなわち、重みの分布Dtの基で次式(1)の誤り率εtをできるだけ小さくするように弱識別器htを選び出す。
【0038】
【数1】

AdaBoost30は、まず、重み初期値D1(i)=1/Nによって初期化を行う。そして次に、各弱識別器について、重みの分布Dtに基づき学習を行う。つまり、上記した式(1)の最小化を行い、ht:X→Yを得る。また、各弱識別器について、誤り率εtを用いて次式(2)の如く信頼度αt∈Rを計算する。更に、各弱識別器について、次式(3)により重みの分布Dtを更新する。
【0039】
【数2】
【0040】
【数3】
但し、Ztは、次式(4)を成立させるための規格化因子であり、次式(5)である。
【0041】
【数4】
【0042】
【数5】
そして、AdaBoost30は、すべての弱識別器ht(x)をその信頼度αtで重み付けをして多数決をとり、次式(6)の如く強識別器H(x)を得る。
【0043】
【数6】
このように、本実施例のAdaBoost30による学習によれば、加速度センサ14が装着され得る身体部位ごと、かつ、加速度センサ14の出力から抽出される各特徴量の種類ごとに、運動実施者の運動強度を推定するうえで最適な閾値を設定することができ、各特徴量の二値識別を運動強度に合わせた最適なものとすることができる。そして、加速度センサ14が装着され得る身体部位ごとに、全特徴量それぞれの設定閾値を組み合わせることで、運動強度クラス別の関係マップを生成することができる。尚、三段階以上(本実施例では五段階)の運動強度クラスを切り分ける必要のある多値判別問題は、ECOC(error-correcting output coding)法などを用いて複数の二値判別問題に分解するものとすればよい。
【0044】
本実施例において、加速度センサ14が装着され得る身体部位ごとに上記の如く生成された関係マップは、更新されて記憶装置16に格納される。記憶装置16に格納された身体部位ごとの関係マップは、パターン選択・認識部26における運動実施者の運動強度の推定の際に読み出される。パターン選択・認識部26は、記憶装置16から読み出したセンサ装着身体部位に対応する上記の関係マップに従って、加速度センサ14からの各特徴量をそれぞれ二値的に閾値処理し、その特徴パターンから運動強度クラスを推定する。
【0045】
かかる構成によれば、携帯機10が運動実施者の身体部位の中で予め定められた部位に装着されると、その装着部位に対応した,複数種類の特徴量と運動強度クラスとの関係マップが記憶装置16から読み出され、その関係マップに従った識別器32により加速度センサ14からの各特徴量が閾値処理される。このため、センサ装着身体部位が予め定められた何れの身体部位であっても、運動強度クラスを推定するうえで用いる関係マップをそのセンサ装着身体部位に応じたものに切り替えることで、運動実施者の運動強度クラスを推定することができる。
【0046】
また、本実施例において、運動強度クラスを推定するうえで用いられる記憶装置16内の関係マップは、センサ装着身体部位ごとに定められたものであり、AdaBoost30を用いて教師データに従って学習されたものである。このため、センサ装着身体部位が予め定められた何れの身体部位であっても、運動強度を推定するうえで行われる各特徴量の識別を運動強度にあわせた最適なものとすることができるので、各センサ装着身体部位での運動強度の推定精度を向上させることができる。
【0047】
従って、本実施例の運動強度推定システムによれば、運動実施者への携帯機10の装着身体部位についてポジションフリーでの運動強度推定を実現しつつ、各センサ装着身体部位での運動強度の推定精度を向上させることが可能となっている。
【0048】
また、上記した本実施例の構成においては、運動実施者の運動強度を推定するうえで、加速度センサ14からの各特徴量をそれぞれ個々に二値判別する複数の単純な識別器32を用いるので、その計算時間が増大するのは回避される。また、個々の識別器32は、複数の弱識別器hの出力がそれぞれの信頼度αで重み付けされて結合されることで得られる最終的な強識別器Hであるので、その識別の精度が低下するのは防止される。従って、本実施例の運動強度推定システムによれば、運動実施者の運動強度の推定を簡易な構成で高速にかつ高精度に実現することが可能となっている。
【0049】
尚、運動強度クラスを推定するうえで用いられる記憶装置16内の関係マップは、上記の如く、AdaBoost30を用いて教師データに従って学習されるが、運動実施者の運動強度を推定するのに加速度センサ14の出力に基づく別の特徴量などが新たに追加される場合、それまでに学習・構築されたAdaBoost30を一つのモジュールとして利用して、新たに運動実施者の運動強度を推定するシステムを構築することができる。すなわち、既存のAdaBoost30を1段目に設定し、そのAdaBoost30の出力を2段目の新たなAdaBoostの入力に接続して、運動実施者の運動強度を推定するうえでAdaBoost30をそのままに一つの弱識別器として利用する。この場合には、新たな特徴量を含めたAdaBoostを構築して総合的・複合的に運動実施者の運動強度を推定することができる。
【0050】
このため、かかる構成によれば、運動実施者の運動強度を推定するのに新たな特徴量が追加される場合、その新規特徴量を運動実施者の運動強度の推定に容易に適合させることができ、運動実施者の運動強度を推定するシステムの拡張性を確保しつつその推定精度の向上を図ることが可能となっている。
【0051】
尚、かかる構成において、新たに構築される後段のAdaBoostによる演算は、前段のAdaBoost30の演算に影響を与えることはなく、また、新規特徴量に係る弱識別器によるものとAdaBoost30の演算結果との結合によるものであるので、あまり複雑ではない。このため、運動実施者の運動強度を推定するのに新たな特徴量が追加される場合にも、その追加に起因して運動実施者の運動強度の推定に要する演算時間があまり長くなることはなく、短時間でその推定を実現させることが可能である。従って、かかる構成によれば、運動実施者の運動強度の推定を簡易な構成で高速にかつ高精度に実現させつつ、その推定システムの拡張性を確保することが可能となっている。
【0052】
ところで、上記の実施例においては、加速度センサ14が特許請求の範囲に記載した「運動センサ」に、記憶装置16が特許請求の範囲に記載した「学習値記憶手段」に、マイクロコンピュータ12の特徴量抽出部22が特許請求の範囲に記載した「特徴量抽出手段」に、センサ装着位置検出部24が特許請求の範囲に記載した「装着部位特定手段」に、パターン選択・認識部26が特許請求の範囲に記載した「推定手段」に、AdaBoost30が特許請求の範囲に記載した「学習手段」に、それぞれ相当している。
【0053】
尚、上記の実施例においては、加速度センサ14の出力に基づく各特徴量を二値識別して運動実施者の運動強度を推定することとしているが、本発明はこれに限定されるものではなく、他の要素、例えば、単位時間当たりの歩数などをも判定して運動実施者の運動強度を推定することとしてもよい。
【0054】
また、上記の実施例においては、運動実施者の身体に生ずる加速度を検知するのに、互いに直交する三軸それぞれに生ずる加速度を検知する三軸の加速度センサ14を用いるが、互いに直交する二軸(例えば、前後方向の軸及び上下方向の軸)それぞれに生ずる加速度を検知する二軸の加速度センサを用いることとしてもよい。また、加速度センサ14を半導体ウェハ上に形成した半導体式のものとしたが、一般的な機械式のものや光学的のものとしてもよい。
【0055】
また、上記の実施例においては、運動実施者の運動強度を推定するのに、運動実施者の身体に生ずる加速度を検知する加速度センサ14を用いることとしているが、気圧変化に基づいて運動実施者の身体に生ずる上下の運動を検知する高度センサ(気圧センサ)や、運動実施者の身体に生ずる角速度を検知するジャイロセンサなどを用いることとしてもよい。この場合、高度センサやジャイロセンサが特許請求の範囲に記載した「運動センサ」に相当する。
【符号の説明】
【0056】
10 携帯機
12 マイクロコンピュータ
14 加速度センサ
16 記憶装置
30 AdaBoost
32 識別器
【技術分野】
【0001】
本発明は、運動強度推定システムに係り、特に、運動を実施する者の運動強度を推定するうえで好適な運動強度推定システムに関する。
【背景技術】
【0002】
従来、運動を実施する運動実施者の運動強度を推定する機器が知られている(例えば、特許文献1参照)。この機器は、運動実施者の運動を検知するための運動センサと、運動センサからの信号を処理するマイクロコンピュータと、を備えている。この機器において、マイクロコンピュータは、運動センサからの運動検知データに基づいて運動実施者の運動強度を推定する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−57514号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記した運動強度を推定する機器は、運動実施者の身体に装着されるものである。機器の装着位置は、腰部(例えばベルト装着)や胸部(例えばシャツの胸ポケットの中),腕部(例えば腕回り装着),脚部(例えばズボンのポケットや靴の中)など様々であるが、いわゆる機器を身体の様々な部位に装着しても運動強度を推定できる(いわゆるポジションフリーを実現できる)機器が存在する。
【0005】
しかし、一般的に、運動強度を最も精度よく推定できる機器の装着位置は運動実施者の腰部であり、機器を腰部に装着すれば最も精度よく運動強度を推定することはできるが、一方、ポジションフリーの機器がポケットの中など移動や回転が許容される部位に装着されると、その移動や回転に起因して運動強度の推定精度が低下するおそれがある。
【0006】
本発明は、上述の点に鑑みてなされたものであり、ポジションフリーでの運動強度推定を実現しつつ、各装着部位での運動強度の推定精度を向上させることが可能な運動強度推定システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的は、運動実施者の身体に生ずる運動を検知する運動センサを備え、該運動センサによる検知結果に基づいて運動実施者の運動強度を推定する運動強度推定システムであって、前記運動センサが装着され得る身体部位ごとに学習された、前記運動強度を示すパラメータとしての複数の特徴量と前記運動強度のクラスとの関係を記憶する学習値記憶手段と、前記運動センサによる検知結果から前記各特徴量をそれぞれ抽出する特徴量抽出手段と、前記運動センサが装着される身体部位を特定する装着部位特定手段と、前記特徴量抽出手段により抽出される前記各特徴量、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記学習値記憶手段に記憶されている前記関係に従って、前記運動強度を推定する推定手段と、を備える運動強度推定システムにより達成される。
【0008】
この態様の発明において、運動強度を示すパラメータとしての複数の特徴量と運動強度クラスとの関係は、運動センサが装着され得る身体部位ごとに学習されて学習値記憶手段に記憶される。そして、運動実施者の運動強度は、運動センサによる検知結果から抽出される各特徴量及びその運動センサが装着される身体部位に基づいて、その学習値記憶手段に記憶される関係を参照して推定される。かかる構成によれば、ポジションフリーでの運動強度推定を実現しつつ、各装着部位での運動強度の推定精度を向上させることができる。
【0009】
ところで、上記した運動強度推定システムにおいて、前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果と、教師データと、に基づいて、前記運動センサが装着され得る身体部位ごとの前記学習値記憶手段に記憶される前記関係を学習する学習手段を備えることとしてもよい。
【0010】
この態様の発明において、運動強度を示すパラメータとしての複数の特徴量と運動強度クラスとの関係は、複数の識別器による識別結果と、教師データと、に基づいて学習される。このため、運動強度を推定するうえで行われる各特徴量の識別を運動強度に合わせた最適なものとすることができる。従って、本発明によれば、運動実施者の運動強度の推定を精度よく実現することができる。
【0011】
また、上記した運動強度推定システムにおいて、前記推定手段は、前記特徴量抽出手段により抽出される前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記運動強度を推定することとしてもよい。
【0012】
この態様の発明において、運動強度を示すパラメータとしての複数の特徴量はそれぞれ識別器により二値的に識別される。このため、各特徴量の識別自体を簡易に行うことができる。また、その複数の特徴量の識別結果を組み合わせれば、運動実施者の運動強度の推定精度を向上させることができる。従って、本発明によれば、運動実施者の運動強度の推定を簡易な構成でかつ精度よく実現することができる。
【発明の効果】
【0013】
本発明によれば、ポジションフリーでの運動強度推定を実現しつつ、各装着部位での運動強度の推定精度を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施例である運動強度推定システムの構成図である。
【図2】本実施例の運動強度推定システムにおいて用いられる複数の特徴量と運動強度クラスとの関係マップの一例を表した図である。
【図3】本実施例の運動強度推定システムにおいて実行される制御ルーチンの一例のフローチャートである。
【図4】本実施例の運動強度推定システムにおいて行われる学習の構成図である。
【図5】本実施例の運動強度推定システムにおいてAdaBoostにより学習を行ううえでの基本概念図である。
【発明を実施するための形態】
【0015】
以下、図面を用いて、本発明の具体的な実施の形態について説明する。
【0016】
図1は、本発明の一実施例である運動強度推定システムの構成図を示す。本実施例の運動強度推定システムは、運動を実施する運動実施者の運動強度(運動量)を推定するシステムである。本実施例において、推定する運動実施者の運動強度は、安静状態、散歩などのゆっくりした歩行、通常の歩行、速歩、トレーニング運動などの複数のクラス(例えば、5クラス)に分類される。
【0017】
本実施例において、運動強度推定システムは、運動実施者に携帯される携帯機10を備えている。携帯機10は、運動実施者の腰部ベルトやシャツの胸ポケット,ズボンのポケット等の何れの身体部位にも装着可能なポジションフリーの機器である。携帯機10は、各種処理を行うマイクロコンピュータ12と、加速度センサ14と、を備えている。マイクロコンピュータ12と加速度センサ14とは電気的に接続されており、マイクロコンピュータ12は、予め定められたプログラムに従って動作し、主に、加速度センサ14から出力される信号に基づいて運動実施者の運動強度を推定する処理を行う。
【0018】
加速度センサ14は、互いに直交する三軸それぞれ(三次元空間)に生ずる加速度に応じた信号を出力するセンサである。加速度センサ14は、例えば、半導体ウェハ上に加速度成分を取り出す機械的な機構と集積回路とを一体化したデバイスであって、ピエゾ抵抗型や圧電型,静電容量型,磁気センサ型などにより構成されている。加速度センサ14の出力信号は、マイクロコンピュータ12に供給される。マイクロコンピュータ12は、加速度センサ14の出力を所定のサンプリング周波数でサンプリングして、運動強度を示すパラメータとしての複数(N個;例えば4個)の特徴量を抽出し、それらの各特徴量に基づいて運動実施者の運動強度を推定する。
【0019】
尚、運動強度を示すパラメータとしての特徴量としては、加速度の所定時間内における平均値,最大値,最小値,標準偏差などである。また、運動強度を推定するうえで用いる特徴量は、三軸加速度データから求められるノルム(ベクトル方向の距離を表す。)、及び、三軸加速度データの中で最も出力の強い軸のデータによるものである。
【0020】
マイクロコンピュータ12は、運動実施者の運動強度を推定するうえで参照すべき関係マップを記憶する記憶装置16を有している。記憶装置16に記憶される関係マップは、上記した複数の特徴量と運動強度のクラスとの関係を示すものであり、後述の如く、加速度センサ14が装着され得る人の身体部位ごとに学習されたものである。すなわち、加速度センサ14が装着され得る人の身体部位別に、上記した複数の特徴量と運動強度のクラスとの関係が記憶装置16に記憶される。
【0021】
図2は、本実施例の運動強度推定システムにおいて用いられる複数の特徴量と運動強度クラスとの関係マップの一例を表した図を示す。尚、複数の特徴量と運動強度クラスとの関係マップは、各特徴量がそれぞれ閾値処理により二値的に識別された場合の特徴パターン("−1"又は"+1")と運動強度クラスとの関係を示すものであればよい。例えば、運動強度クラスがクラス0〜クラス4までの5クラスある場合、特徴量の数は4個あれば十分であり、図2に示す如く、ある特徴量aの閾値によりクラス0とクラス1とを切り分け、別の特徴量bの閾値によりクラス1とクラス2とを切り分け、特徴量cの閾値によりクラス2とクラス3とを切り分け、そして、特徴量dの閾値によりクラス3とクラス4とを切り分けるようにすればよい。
【0022】
また、複数の特徴量と運動強度クラスとの関係の初期値は、予め実験的に定められた一般的なものであってもよく、また、予め運動実施者自身に指示した運動に対して得られるもの(例えば、運動強度クラスが既知である所定のリズムで歩行させる運動を運動実施者に行わせたときに加速度センサ14の出力から得られる各特徴量と、その運動の運動強度クラスとの関係)であってもよい。
【0023】
更に、関係マップの学習は、医療機関側や運動強度の推定に信頼性の高い機器側と運動実施者の携帯機10とを遠隔的に通信接続して、その医療機関側などから送られるデータを書き込んだものであってもよく、また、初期値と同じように、所定期間(例えば一週間)ごとに運動実施者自身に指示した運動に対して得られるもの(例えば、運動強度クラスが既知である所定のリズムで歩行させる運動を運動実施者に行わせたときに加速度センサ14の出力から得られる各特徴量と、その運動の運動強度クラスとの関係)であってもよい。また、この学習は、携帯機10が装着され得る身体部位ごとに行われる。
【0024】
次に、図3を参照して、本実施例の運動強度推定システムにおいてマイクロコンピュータ12が運動実施者の運動強度を推定する手法について説明する。図3は、本実施例の運動強度推定システムにおいて実行される制御ルーチンの一例のフローチャートを示す。
【0025】
本実施例において、マイクロコンピュータ12は、前処理部20、特徴量抽出部22、装着位置検出部24、及びパターン選択・認識部26を有している。前処理部20には、加速度センサ14が接続されており、加速度センサ14からの加速度データが入力される(ステップ100)。前処理部20は、加速度センサ14からの加速度データをフィルタ処理してノイズ除去を行う。
【0026】
特徴量抽出部22には、前処理部20が接続されており、前処理部20からのノイズ除去後の加速度データが入力される。特徴量抽出部22は、前処理部20からの加速度データから複数種類の特徴量をそれぞれ抽出する(ステップ102)。これらの特徴量は、上記の如く、三軸加速度データから求められるノルム及び三軸加速度データの中で最も出力の強い軸のデータによるものであって、加速度の所定時間内における平均値,最大値,最小値,標準偏差などである。
【0027】
また、装着位置検出部24には、前処理部20が接続されており、前処理部20からのノイズ除去後の加速度データが入力される。装着位置検出部24は、前処理部20からの加速度データを処理して、その加速度センサ14すなわち携帯機10が何れの身体部位(例えば、予め定められた腰部や胸部,脚部など)に装着されているかを判定する(ステップ104)。尚、装着位置検出部24による装着位置判定は、予め用意された身体部位別の加速度データの時間変化などの特徴パターンに基づいて行われる。
【0028】
パターン選択・認識部26には、上記した特徴量抽出部22及び装着位置検出部24が接続されており、特徴量抽出部22からの複数種類の特徴量及び装着位置検出部24からのセンサ装着身体部位の情報が入力される。パターン選択・認識部26には、また、加速度センサ14が装着され得る人の身体部位別に複数種類の特徴量と運動強度クラスとの関係マップを記憶する記憶装置16が接続されており、記憶装置16からのその関係情報が読み出される。
【0029】
パターン選択・認識部26は、特徴量抽出部22からの複数種類の特徴量、及び、装着位置検出部24からのセンサ装着身体部位の情報に基づいて、記憶装置16に記憶される複数種類の特徴量と運動強度クラスとの関係マップに従って、運動実施者の運動強度を推定する。
【0030】
具体的には、まず、装着位置検出部24からのセンサ装着身体部位の情報を基に、記憶装置16に記憶されている身体部位別の複数種類の特徴量と運動強度クラスとの関係マップのうちから、そのセンサ装着身体部位に対応する関係マップを選択する(ステップ106)。次に、特徴量抽出部22からの複数種類の特徴量を、その選択した関係マップに従って閾値処理することで、運動強度クラス(クラス0〜クラス4)を推定する(ステップ108)。
【0031】
次に、図4及び図5を参照して、本実施例の運動強度推定システムに用いる記憶装置16に記憶される関係マップの学習について説明する。図4は、本実施例の運動強度推定システムにおいて行われる学習の構成図を示す。また、図5は、本実施例の運動強度推定システムにおいてAdaBoostにより学習を行ううえでの基本概念図を示す。
【0032】
本実施例において、マイクロコンピュータ12は、運動実施者の運動強度を推定するのに用いるAdaBoost30を有している。AdaBoost30は、複数(N個;例えば4個)の識別器32を有している。これら複数の識別器32には、加速度センサ14の出力から抽出される複数の特徴量の情報が入力される。特徴量と識別器32とは、一対一で対応する。
【0033】
AdaBoost30の各識別器32はそれぞれ、対応して入力される加速度センサ14からの特徴量を、記憶装置16から読み出したセンサ装着身体部位に対応する上記の関係マップに従って二値的に閾値処理する(例えば、特徴量が閾値以下であるときはそのことを示す"−1"を出力し、一方、特徴量が閾値を超えるときはそのことを示す"+1"を出力する。)。AdaBoost30は、各特徴量をそれぞれ識別器32で二値識別して、その各識別結果を組み合わせた特徴パターンを形成する。そして、その特徴パターンを、記憶装置16から読み出したセンサ装着身体部位に対応する上記の関係マップに照らし合わせることにより、上記した運動実施者の運動強度クラスの推定を行う。
【0034】
また、AdaBoost30は、多段階分割・追加学習型分析手法を適用したパターン認識のための学習アルゴリズムである。AdaBoost30による学習は、加速度センサ14の装着され得る身体部位ごと及び特徴量の種類ごとに、逐次的に学習データの重み(信頼度α)を変化させながら異なる識別器を作り、これら複数(T個)の識別器(弱識別器ht)の重み付け多数決によって最終的な識別関数(強識別器H)を与えるものである。すなわち、AdaBoost30は、加速度センサ14の装着され得る身体部位ごと及び特徴量の種類ごとに、T個の弱識別器htと、それらの弱識別器htの出力が入力される一つの強識別器Hと、を有している。AdaBoost30による学習結果は、記憶装置16に記憶される。
【0035】
AdaBoost30は、単純でかつ識別力の比較的弱い弱識別器htを逐次的に学習して強識別器Hを生成し、識別器としての精度を増強する。すなわち、n個の入力xi∈Xとその入力xiに対する正解yi∈Y={±1}との組(=(x1,y1),・・・,(xn,yn))を学習データとして用い、T個の弱識別器ht(x)(t=1,2,・・・,T)を、信頼度αtで重み付けをして結合することにより強識別器H(x)を構成する。強識別器H(x)は、入力されるT個の弱識別器ht(x)からの各出力を信頼度αで重み付けをして結合することにより、最終的な識別を行う(例えば、特徴量が閾値以下であるときはそのことを示す"−1"を出力し、一方、特徴量が閾値を超えるときはそのことを示す"+1"を出力する。)。
【0036】
尚、学習データの正解yi(教師データ)は、例えば、識別結果としての出力について信頼性の比較的高い製品(例えば、運動実施者への装着部位が腰部に限定される一軸加速度センサ搭載の携帯機;株式会社スズケン製の商品(商品名=ライフコーダ))を被験者に装着したときにその製品での識別結果として出力されるものを用い、或いは、予め正解yiが与えられた運動を被験者に行わせたときのその正解yiを用いる。また、この被験者は、運動強度の推定精度を向上させるうえで運動実施者自身であることが望ましい。
【0037】
AdaBoost30は、t回目の学習における入力xiの重みをDt(i)とし、その重みの初期値をすべての入力について一様の値D1(i)=1/Nとしたうえで、各回において正しく識別できなかった入力データの重みを大きくし正しく識別できたデータの重みを小さくすることにより、前回正しく識別できなかった入力データを次の回において重点的に学習する。すなわち、重みの分布Dtの基で次式(1)の誤り率εtをできるだけ小さくするように弱識別器htを選び出す。
【0038】
【数1】
AdaBoost30は、まず、重み初期値D1(i)=1/Nによって初期化を行う。そして次に、各弱識別器について、重みの分布Dtに基づき学習を行う。つまり、上記した式(1)の最小化を行い、ht:X→Yを得る。また、各弱識別器について、誤り率εtを用いて次式(2)の如く信頼度αt∈Rを計算する。更に、各弱識別器について、次式(3)により重みの分布Dtを更新する。
【0039】
【数2】
【0040】
【数3】
但し、Ztは、次式(4)を成立させるための規格化因子であり、次式(5)である。
【0041】
【数4】
【0042】
【数5】
そして、AdaBoost30は、すべての弱識別器ht(x)をその信頼度αtで重み付けをして多数決をとり、次式(6)の如く強識別器H(x)を得る。
【0043】
【数6】
このように、本実施例のAdaBoost30による学習によれば、加速度センサ14が装着され得る身体部位ごと、かつ、加速度センサ14の出力から抽出される各特徴量の種類ごとに、運動実施者の運動強度を推定するうえで最適な閾値を設定することができ、各特徴量の二値識別を運動強度に合わせた最適なものとすることができる。そして、加速度センサ14が装着され得る身体部位ごとに、全特徴量それぞれの設定閾値を組み合わせることで、運動強度クラス別の関係マップを生成することができる。尚、三段階以上(本実施例では五段階)の運動強度クラスを切り分ける必要のある多値判別問題は、ECOC(error-correcting output coding)法などを用いて複数の二値判別問題に分解するものとすればよい。
【0044】
本実施例において、加速度センサ14が装着され得る身体部位ごとに上記の如く生成された関係マップは、更新されて記憶装置16に格納される。記憶装置16に格納された身体部位ごとの関係マップは、パターン選択・認識部26における運動実施者の運動強度の推定の際に読み出される。パターン選択・認識部26は、記憶装置16から読み出したセンサ装着身体部位に対応する上記の関係マップに従って、加速度センサ14からの各特徴量をそれぞれ二値的に閾値処理し、その特徴パターンから運動強度クラスを推定する。
【0045】
かかる構成によれば、携帯機10が運動実施者の身体部位の中で予め定められた部位に装着されると、その装着部位に対応した,複数種類の特徴量と運動強度クラスとの関係マップが記憶装置16から読み出され、その関係マップに従った識別器32により加速度センサ14からの各特徴量が閾値処理される。このため、センサ装着身体部位が予め定められた何れの身体部位であっても、運動強度クラスを推定するうえで用いる関係マップをそのセンサ装着身体部位に応じたものに切り替えることで、運動実施者の運動強度クラスを推定することができる。
【0046】
また、本実施例において、運動強度クラスを推定するうえで用いられる記憶装置16内の関係マップは、センサ装着身体部位ごとに定められたものであり、AdaBoost30を用いて教師データに従って学習されたものである。このため、センサ装着身体部位が予め定められた何れの身体部位であっても、運動強度を推定するうえで行われる各特徴量の識別を運動強度にあわせた最適なものとすることができるので、各センサ装着身体部位での運動強度の推定精度を向上させることができる。
【0047】
従って、本実施例の運動強度推定システムによれば、運動実施者への携帯機10の装着身体部位についてポジションフリーでの運動強度推定を実現しつつ、各センサ装着身体部位での運動強度の推定精度を向上させることが可能となっている。
【0048】
また、上記した本実施例の構成においては、運動実施者の運動強度を推定するうえで、加速度センサ14からの各特徴量をそれぞれ個々に二値判別する複数の単純な識別器32を用いるので、その計算時間が増大するのは回避される。また、個々の識別器32は、複数の弱識別器hの出力がそれぞれの信頼度αで重み付けされて結合されることで得られる最終的な強識別器Hであるので、その識別の精度が低下するのは防止される。従って、本実施例の運動強度推定システムによれば、運動実施者の運動強度の推定を簡易な構成で高速にかつ高精度に実現することが可能となっている。
【0049】
尚、運動強度クラスを推定するうえで用いられる記憶装置16内の関係マップは、上記の如く、AdaBoost30を用いて教師データに従って学習されるが、運動実施者の運動強度を推定するのに加速度センサ14の出力に基づく別の特徴量などが新たに追加される場合、それまでに学習・構築されたAdaBoost30を一つのモジュールとして利用して、新たに運動実施者の運動強度を推定するシステムを構築することができる。すなわち、既存のAdaBoost30を1段目に設定し、そのAdaBoost30の出力を2段目の新たなAdaBoostの入力に接続して、運動実施者の運動強度を推定するうえでAdaBoost30をそのままに一つの弱識別器として利用する。この場合には、新たな特徴量を含めたAdaBoostを構築して総合的・複合的に運動実施者の運動強度を推定することができる。
【0050】
このため、かかる構成によれば、運動実施者の運動強度を推定するのに新たな特徴量が追加される場合、その新規特徴量を運動実施者の運動強度の推定に容易に適合させることができ、運動実施者の運動強度を推定するシステムの拡張性を確保しつつその推定精度の向上を図ることが可能となっている。
【0051】
尚、かかる構成において、新たに構築される後段のAdaBoostによる演算は、前段のAdaBoost30の演算に影響を与えることはなく、また、新規特徴量に係る弱識別器によるものとAdaBoost30の演算結果との結合によるものであるので、あまり複雑ではない。このため、運動実施者の運動強度を推定するのに新たな特徴量が追加される場合にも、その追加に起因して運動実施者の運動強度の推定に要する演算時間があまり長くなることはなく、短時間でその推定を実現させることが可能である。従って、かかる構成によれば、運動実施者の運動強度の推定を簡易な構成で高速にかつ高精度に実現させつつ、その推定システムの拡張性を確保することが可能となっている。
【0052】
ところで、上記の実施例においては、加速度センサ14が特許請求の範囲に記載した「運動センサ」に、記憶装置16が特許請求の範囲に記載した「学習値記憶手段」に、マイクロコンピュータ12の特徴量抽出部22が特許請求の範囲に記載した「特徴量抽出手段」に、センサ装着位置検出部24が特許請求の範囲に記載した「装着部位特定手段」に、パターン選択・認識部26が特許請求の範囲に記載した「推定手段」に、AdaBoost30が特許請求の範囲に記載した「学習手段」に、それぞれ相当している。
【0053】
尚、上記の実施例においては、加速度センサ14の出力に基づく各特徴量を二値識別して運動実施者の運動強度を推定することとしているが、本発明はこれに限定されるものではなく、他の要素、例えば、単位時間当たりの歩数などをも判定して運動実施者の運動強度を推定することとしてもよい。
【0054】
また、上記の実施例においては、運動実施者の身体に生ずる加速度を検知するのに、互いに直交する三軸それぞれに生ずる加速度を検知する三軸の加速度センサ14を用いるが、互いに直交する二軸(例えば、前後方向の軸及び上下方向の軸)それぞれに生ずる加速度を検知する二軸の加速度センサを用いることとしてもよい。また、加速度センサ14を半導体ウェハ上に形成した半導体式のものとしたが、一般的な機械式のものや光学的のものとしてもよい。
【0055】
また、上記の実施例においては、運動実施者の運動強度を推定するのに、運動実施者の身体に生ずる加速度を検知する加速度センサ14を用いることとしているが、気圧変化に基づいて運動実施者の身体に生ずる上下の運動を検知する高度センサ(気圧センサ)や、運動実施者の身体に生ずる角速度を検知するジャイロセンサなどを用いることとしてもよい。この場合、高度センサやジャイロセンサが特許請求の範囲に記載した「運動センサ」に相当する。
【符号の説明】
【0056】
10 携帯機
12 マイクロコンピュータ
14 加速度センサ
16 記憶装置
30 AdaBoost
32 識別器
【特許請求の範囲】
【請求項1】
運動実施者の身体に生ずる運動を検知する運動センサを備え、該運動センサによる検知結果に基づいて運動実施者の運動強度を推定する運動強度推定システムであって、
前記運動センサが装着され得る身体部位ごとに学習された、前記運動強度を示すパラメータとしての複数の特徴量と前記運動強度のクラスとの関係を記憶する学習値記憶手段と、
前記運動センサによる検知結果から前記各特徴量をそれぞれ抽出する特徴量抽出手段と、
前記運動センサが装着される身体部位を特定する装着部位特定手段と、
前記特徴量抽出手段により抽出される前記各特徴量、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記学習値記憶手段に記憶されている前記関係に従って、前記運動強度を推定する推定手段と、
を備えることを特徴とする運動強度推定システム。
【請求項2】
前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果と、教師データと、に基づいて、前記運動センサが装着され得る身体部位ごとの前記学習値記憶手段に記憶される前記関係を学習する学習手段を備えることを特徴とする請求項1記載の運動強度推定システム。
【請求項3】
前記推定手段は、前記特徴量抽出手段により抽出される前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記運動強度を推定することを特徴とする請求項2記載の運動強度推定システム。
【請求項1】
運動実施者の身体に生ずる運動を検知する運動センサを備え、該運動センサによる検知結果に基づいて運動実施者の運動強度を推定する運動強度推定システムであって、
前記運動センサが装着され得る身体部位ごとに学習された、前記運動強度を示すパラメータとしての複数の特徴量と前記運動強度のクラスとの関係を記憶する学習値記憶手段と、
前記運動センサによる検知結果から前記各特徴量をそれぞれ抽出する特徴量抽出手段と、
前記運動センサが装着される身体部位を特定する装着部位特定手段と、
前記特徴量抽出手段により抽出される前記各特徴量、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記学習値記憶手段に記憶されている前記関係に従って、前記運動強度を推定する推定手段と、
を備えることを特徴とする運動強度推定システム。
【請求項2】
前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果と、教師データと、に基づいて、前記運動センサが装着され得る身体部位ごとの前記学習値記憶手段に記憶される前記関係を学習する学習手段を備えることを特徴とする請求項1記載の運動強度推定システム。
【請求項3】
前記推定手段は、前記特徴量抽出手段により抽出される前記各特徴量をそれぞれ二値的に識別する複数の識別器による識別結果、及び、前記装着部位特定手段により特定される前記運動センサが装着される身体部位に基づいて、前記運動強度を推定することを特徴とする請求項2記載の運動強度推定システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−207485(P2010−207485A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−58710(P2009−58710)
【出願日】平成21年3月11日(2009.3.11)
【出願人】(000132194)株式会社スズケン (12)
【出願人】(507054456)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月11日(2009.3.11)
【出願人】(000132194)株式会社スズケン (12)
【出願人】(507054456)
[ Back to top ]