
運動拘束具及び擬似体験装置
【課題】伸縮運動、曲げ運動、捩り運動を大きな拘束力で拘束することができる運動拘束具、及びこれを用いた擬似体験装置を提供することを目的とする。
【解決手段】隣接する小片11に対して、その厚さ方向と直交する方向に位置ずれ可能なように連結した複数の小片11からなる小片連結体12と、該小片連結体12を内部空間に収納し、外力により変形自在な中空状の袋体13と、該袋体13の内部空間を収縮することにより、小片11の外面同士及び小片連結体12の外面と袋体13の内面とを密着させて、外力に対する抗力を発生させる密着手段と、を具備し、運動を可変的に拘束する運動拘束具10。
【解決手段】隣接する小片11に対して、その厚さ方向と直交する方向に位置ずれ可能なように連結した複数の小片11からなる小片連結体12と、該小片連結体12を内部空間に収納し、外力により変形自在な中空状の袋体13と、該袋体13の内部空間を収縮することにより、小片11の外面同士及び小片連結体12の外面と袋体13の内面とを密着させて、外力に対する抗力を発生させる密着手段と、を具備し、運動を可変的に拘束する運動拘束具10。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運動拘束具、詳しくは運動を可変的に拘束する運動拘束具、及びこれを用いた擬似体験装置に関するものである。
【背景技術】
【0002】
福祉やスポーツにおいて人間の運動能力を機械的に支援する目的で盛んな研究がなされており、実際に、高齢者や身障者等、身体機能に障害を有する者の筋肉を補助するサポータや、重力や空気抵抗等の人体に作用する力を擬似的に表現して、仮想現実的にスポーツトレーニングを行なうための擬似体験装置が存在する。これらには人体の関節等の運動を拘束するための運動拘束具が多く用いられている。例えば、特許文献1には、運動を可変的に拘束する運動拘束具が開示されている。
【0003】
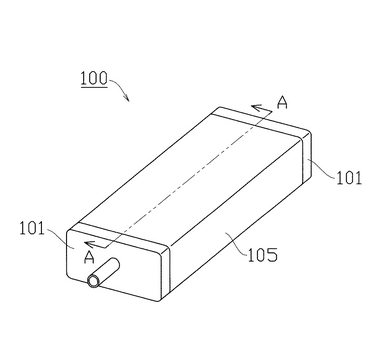
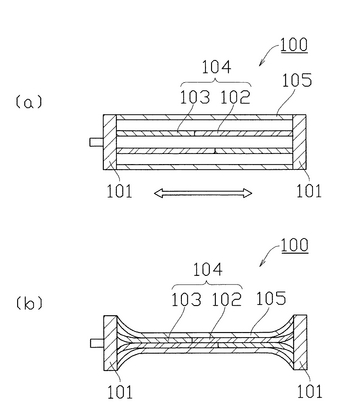
特許文献1に開示された伸縮運動を可変的に拘束する運動拘束具100は、図16及び図17に示すように、外力が作用する作用端部101間に対向して架設された伸縮自在な伸縮部102と伸縮しない非伸縮部103とからなる2枚の伸縮拘束部材104と、該伸縮拘束部材104を内包し、作用端部101とともに容器として内部空間を形成する側周壁が伸縮自在な筒体105と、該筒体105の内部空間と連通された図示しないポンプとを備えたものである。
【0004】
この運動拘束具100が伸縮運動を拘束しない場合には、図17(a)に示すように、筒体105の内部空間が一定容積に維持され、対向する伸縮拘束部材104は離間した状態であり、運動拘束具100は、伸縮拘束部材104の伸縮部102の弾性により、外力が作用すれば矢印方向へ伸縮自在である。一方、伸縮運動を拘束する場合には、任意の伸縮状態において、筒体105の内部空間内にある気体をポンプにより排出し、筒体105の内圧を負圧として、図17(b)に示すように、2枚の伸縮拘束部材104を密着させる。これにより、2枚の伸縮拘束部材104の非伸縮部103の密着面に摩擦が生じ、摩擦力が伸縮運動を引き起こす外力に対する抗力となって、伸縮運動を拘束する。筒体105の内圧を制御することにより、密着面に生じる摩擦力を制御し、伸縮運動の拘束力を任意に変動させることができる。
【0005】
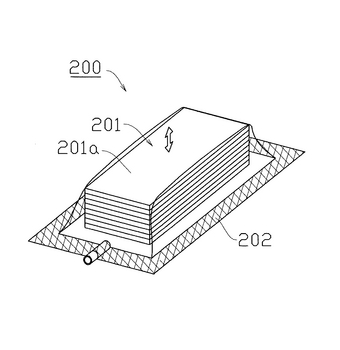
また、特許文献1に開示された曲げ運動を可変的に拘束する運動拘束具200は、図18に示すように、外力により曲げ変形し非伸縮な薄膜状の曲げ拘束部材201aを積層した曲げ拘束部材201が、容器である包袋202内に複数列設され、包袋202の内部空間と連通された図示しないポンプを備えたものである。
【0006】
この運動拘束具200が曲げ運動を拘束しない場合には、包袋202の内部空間が適量の気体で満たされて外部の大気圧と均衡し、各曲げ拘束部材201aは、他の曲げ拘束部材201aの接触面に曲げ運動を拘束されず、外力に応じて曲げ変形する。一方、曲げ運動を拘束する場合には、包袋202の内部空間から気体をポンプにより排出し、包袋202の内圧を負圧として、各曲げ拘束部材201aを密着させる。これにより、各曲げ拘束部材201aの密着面に摩擦力が生じ、摩擦力が曲げ運動を引き起こす外力に対する抗力となって、曲げ運動を拘束する。
【0007】
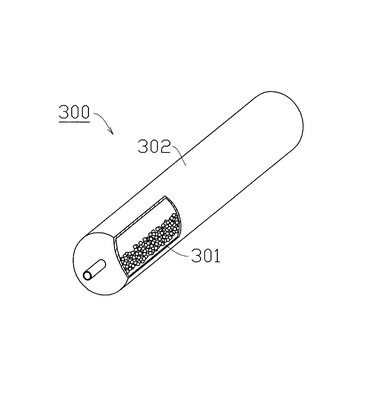
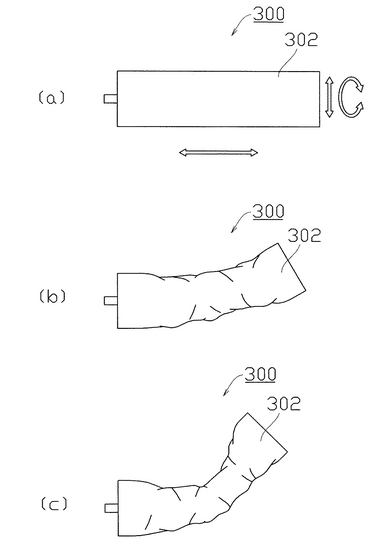
また、特許文献1に開示された伸縮運動、曲げ運動、捻り運動のすべてを拘束する運動拘束具300は、図19に示すように、多数の粒状体301と、内部空間に該粒状体301が装填された中空柱体状の容器302と、図示しないポンプとを備えたものである。容器302は、側周壁が軟質かつ非伸縮性で内部空間に流出入する空気を透過させない素材からなり、その両端が容易に変形しないプラスチック等からなるものである。
【0008】
この運動拘束具300が運動を拘束しない場合は、図20(a)に示すように、容器302の内部空間が適量の気体で満たされて、容器302の内圧と外部の大気圧とが均衡した状態にあり、運動拘束具300は、容器302の両端に作用する外力に応じて矢印に示すように伸縮、曲げ、捻り運動をする。一方、運動を拘束する場合は、任意の状態において、図20(b)及び図20(c)に示すように、容器302の内部空間内にある気体をポンプにより排出し、容器302内の内圧を負圧として、容器302の側周壁及び粒状体301を、任意の状態の運動拘束部材302の形状で密着させる。これにより、粒状体301同士、及び容器302の側周壁と粒状体との密着面に摩擦力が生じ、該摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。なお、容器302の内圧を制御することにより、すなわち、ポンプを制御することによって、前記摩擦力を任意に変化させることができ、該摩擦力の変化に応じて拘束力も変化するので、ポンプにより拘束力を制御することができる。
【特許文献1】特開2002−186683号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかし、上記従来の運動拘束具100においては、伸縮運動しか拘束できず、曲げ運動や捩り運動を拘束することができないという問題があった。また、上記従来の運動拘束具200においては、曲げ運動しか拘束できず、伸縮運動や捩り運動を拘束することができないという問題があった。また、上記従来の運動拘束具300においては、伸縮運動、曲げ運動、捩り運動を拘束することができるが、粒状体301同士、及び容器302の側周壁と粒状体301との密着面に生じる摩擦力によって外力に対する抗力を発生させているので、運動拘束具100,200に比べて密着面の面積が小さく、拘束力が小さいという問題があった。
【0010】
本発明は、かかる問題を解決すべくなされたものであり、伸縮運動、曲げ運動、捩り運動を大きな拘束力で拘束することができる運動拘束具、及びこれを用いた擬似体験装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、請求項1に記載の運動拘束具は、運動を可変的に拘束する運動拘束具であって、隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能なように連結した複数の小片からなる小片連結体と、該小片連結体を内部空間に収納し、外力により変形自在な中空状の袋体と、該袋体の内部空間を収縮することにより、前記小片の外面同士及び前記小片連結体の外面と前記袋体の内面とを密着させて、前記外力に対する抗力を発生させる密着手段と、を具備することを特徴としている。
【0012】
請求項2に記載の運動拘束具は、請求項1に記載の運動拘束具において、前記小片は厚さ方向に貫通する貫通孔を備え、前記小片連結体は厚さ方向に連接する小片が交互に位置をずらしてこれら小片の貫通孔を挿通する糸状物によって連結されていることを特徴としている。
【0013】
請求項3に記載の運動拘束具は、請求項1又は2に記載の運動拘束具において、前記小片は可撓性を有するものであることを特徴としている。
【0014】
請求項4に記載の運動拘束具は、請求項1から3の何れか1項に記載の運動拘束具において、前記密着手段は、前記袋体の内部空間を負圧とすることにより、当該袋体の内部空間を収縮することを特徴としている。
【0015】
請求項5に記載の擬似体験装置は、人体に作用する外力を仮想現実的に体験させる擬似体験装置であって、請求項1から4の何れか1項に記載の運動拘束具と、関節の角度、運動速度、又は抗力の少なくとも何れか1つを検出して検知信号を発信するセンサとを備えてなる関節装着具と、前記検知信号を受けて、前記運動拘束具に生ずる抗力を制御する制御手段と、を具備することを特徴としている。
【発明の効果】
【0016】
請求項1に記載の運動拘束具によれば、連結された複数の小片はそれぞれ隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能であるので、小片連結体は外力によって形状が可変となるため、袋体の内部空間に収納された小片連結体が任意形状をなす状態において、密着手段により袋体の内部空間を収縮させることより、外力に対する抗力を発生することができ、伸縮運動、曲げ運動、捩り運動を拘束することができる。また、密着手段により袋体の内部空間を収縮することによって、小片の外面同士及び小片連結体の外面と袋体の内面とが密着し、密着面に生じる摩擦力が外力に対する抗力を発生させるので、上記従来の運動拘束具300に比べて大きな拘束力を得ることができる。また、小片連結体の外面の形状が可変となるため、対象物の表面に運動拘束具を密接させることができる。
【0017】
請求項2に記載の運動拘束具によれば、小片は、その貫通孔と糸状体との間に隙間が存在することによって、隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能になるので、外力によって小片連結体の形状が可変となり、対象物の表面の曲面に対して密接させることができる運動拘束具を簡易な構成にて得ることができる。また、厚さ方向に連接する小片が交互に位置をずらして連結されているため、小片連結体の外面を広面積とすることが可能となり、対象物の表面を広範囲に渡って運動拘束具を密接させることができる。また、袋体の内面と密着する小片連結体の外面を広面積とすることが可能となり、大きな拘束力を得ることができる。
【0018】
請求項3に記載の運動拘束具によれば、小片が可撓性を有するため、密着手段により袋体の内部空間を収縮することによって、外力に対して撓み変形した小片の外面が、隣接する小片の可動を妨げて外力に対する抗力を発生させるので、より大きな拘束力を得ることができる。さらに撓みによって小片の外面同士が密着すれば、その密着面に生じる摩擦力が外力に対する抗力を発生させるので、より大きな拘束力を得ることができる。
【0019】
請求項4に記載の運動拘束具によれば、密着手段は袋体の内部空間を負圧とすることにより、袋体の内部空間を収縮することができるので、袋体の内部空間に存する気体を排出するポンプ等を用いることによって密着手段を容易に得ることができる。
【0020】
請求項5に記載の擬似体験装置によれば、前記何れかの運動拘束具を関節装着具が備えているので、形状が可変な運動拘束具を関節に密接させることができるため、人体との親和性が高く、また、伸縮運動、曲げ運動、捩り運動を拘束可能な運動拘束具によって運動を拘束するため、現実度の高い擬似体験装置を得ることができる。
【発明を実施するための最良の形態】
【0021】
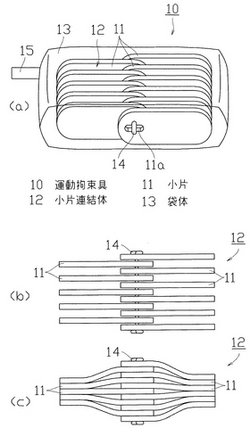
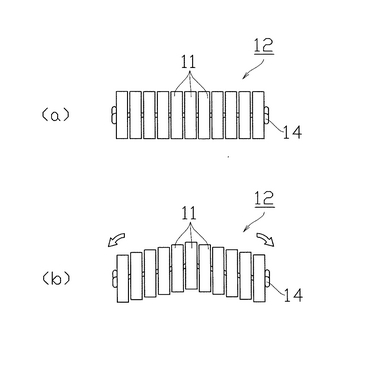
本発明の第1の実施の形態に係る運動拘束具10について図面に基づき説明する。この運動拘束具10は、図1(a)に示すように、隣接する小片11に対して可動可能に連結した複数の小片11からなる小片連結体12と、該小片連結体12を内部空間に収納する中空状の袋体13と、該袋体13の内部空間を収縮する図示しないポンプと、からなるものである。
【0022】
各小片11は、合成樹脂等からなる薄厚の長円形の板状部材であり、その厚さ方向に貫通する貫通孔11aを備えている。該貫通孔11aは、小片11のなす長円形の一方の半円の中心近傍に位置しており、小片11の長手方向をその長手方向とする長円形である。各小片11は、図1(b)に示すように、貫通孔11aを挿通する1本の糸状物14によって厚さ方向に隣接する小片11と連結されている。糸状物14は、繭・綿・麻・毛などの繊維を細く長く引き伸ばし縒りをかけた糸や、合成樹脂等からなる非収縮性の糸状のもの、或いはゴム等からなる糸状の弾性体である。各小片11は、隣接する小片11に対して長手方向に所定距離、すなわち貫通孔11aの長手方向長さから糸状物14の直径との差からなる距離だけ移動可能であるとともに、幅方向に所定距離、すなわち貫通孔11aの幅から糸状物14の直径との差の2倍の距離だけ移動可能である。小片11は、これらの移動の組合わせ、すなわち隣接する小片11に対してその厚さ方向に直交する面内における平行移動が貫通孔11aと糸状物14との隙間からなる所定範囲内において可能である。また、小片11は、隣接する小片11に対してその厚さ方向に直交する面内における回動が可能である。従って、小片11は、隣接する小片11に対してその厚さ方向と直交する方向に位置ずれが可能である。小片連結体12は、厚さ方向に連接する小片11が交互に位置をずらして、これら小片11の貫通孔11aを挿通する1本の糸状物14によって連結されている。具体的には、小片連結体12は、厚さ方向に連接する小片11が交互に並置するように、すなわち、厚さ方向に隣接する小片11が互い違いに位置するように1本の糸状物14によって連結されている。これにより、厚さ方向に連接する小片11が1つおきに、それらの貫通孔11aに対する最離間部が反対方向に位置している。
【0023】
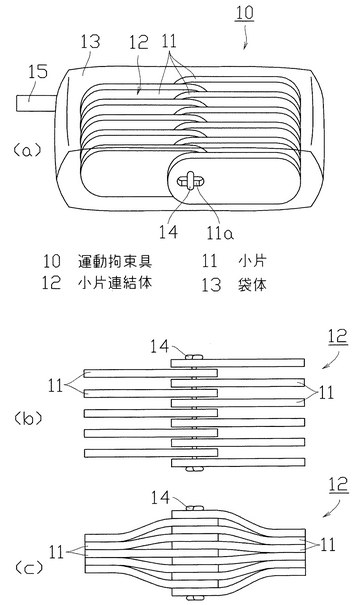
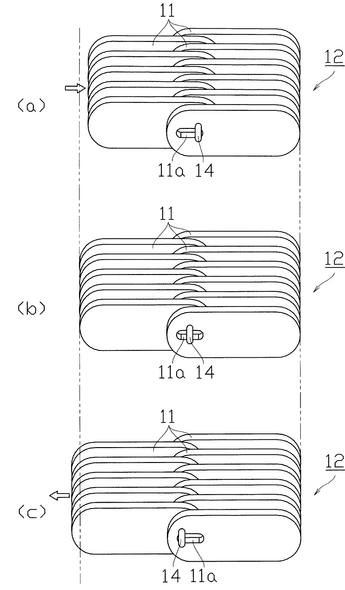
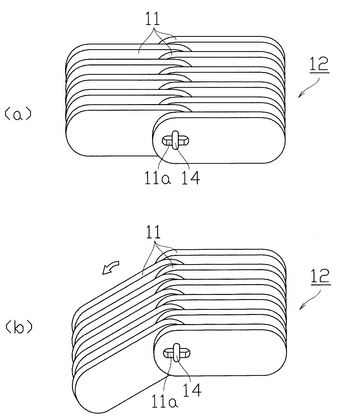
小片連結体12は全体として、図2(a)から図2(c)に示すように、その長手方向に伸縮変形が可能であるとともに、図3(a)及び図3(b)に示すように、小片11の面方向の曲げ変形が可能であり、図4(a)及び図4(b)に示すように、小片11の厚さ方向の曲げ変形が可能である。また、小片連結体12は、これらの変形を組み合わせた変形が可能である。これらの変形は、小片連結体12に外力を加えることにより、その外力に応じてなされる。
【0024】
前記袋体13は、軟質で内部空間に流出入する作動流体を透過させない素材からなり、外力により変形自在な中空状のものであり、その端部近傍には、図1(a)に示すように、内部空間に作動流体を流通させるための流通口15が設けられている。袋体13が小片連結体12を囲繞することにより、袋体13の内部空間に小片連結体12を収納するとともに、小片連結体12の形状を一定の範囲内で維持している。すなわち、小片連結体12は、袋体13によって厚さ方向に連接する小片11が交互に並置するように維持されている。前記ポンプは、袋体13の内部空間に流通させる作動流体を流通口15から流出入させるものである。なお、作動流体は、空気や水のように流動性を有するものであれば、特に限定されるものではない。
【0025】
本運動拘束具10が運動を拘束しない場合には、袋体13の内部空間が適量の作動流体で満たされて、袋体13の内部空間と外部の大気圧とが均衡した状態である。この状態においては、一定容積の内部空間が維持されて、小片連結体12は外力により自在に変形可能な状態である。例えば、静止した対象物の表面に運動拘束具10を押し当てた場合には、当該表面に追従して小片連結体12が変形するとともに、当該小片連結体12を収容する袋体13も自在に変形するので、対象物の表面に運動拘束具10を密接させることができる。
【0026】
本運動拘束具10が運動を拘束する場合には、小片連結体12が任意の形状である状態において、前記ポンプにより袋体13の内部空間にある作動流体が流出されて、袋体13の内部圧が負圧となった状態である。この状態においては、内部空間の容積が収縮されて、小片連結体12の隣接する小片11同士及び小片連結体12の外面(小片連結体12の外面となる小片11の外面の集合体)と袋体13の内面とがそれぞれ密着し、これらの密着面に摩擦力が生じ小片連結体12の形状が固定され、摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。なお、各小片11の周面、特に上面及び下面に鋸刃状などの凹凸形状を形成すれば、小片連結体12の外面と袋体13の内面との摩擦力が大きくなり、拘束力が増すので好ましい。また、各小片11を合成樹脂やゴム等の可撓性を有するものとすれば、図1(c)に示すように、外力に対して小片11が撓み変形する。ポンプにより袋体103の内部空間を収縮することによって、外力に対して撓み変形した小片11の外面が、隣接する小片11の可動を妨げて外力に対する抗力を発生させ、拘束力が増すので好ましい。さらに、間に位置する小片11を挟んで対向して位置する小片11の外面同士も密着させれば、その密着面に生じる摩擦力が外力に対する抗力を発生させ、さらに拘束力が増す。
【0027】
前記摩擦力は、それぞれ密着面に作用する法線方向の力(以下、法線力という。)に、密着面の摩擦係数を乗じたものであるから、法線力を制御することにより、該密着面に生じる摩擦力を制御することができる。すなわち、袋体13の内部圧を制御することにより、運動の拘束力を任意に変動させることができる。さらに、本運動拘束具10が運動を拘束した状態において、前記ポンプにより袋体13の内部空間に作動流体を流入させることより、運動の拘束を解放することができる。
【0028】
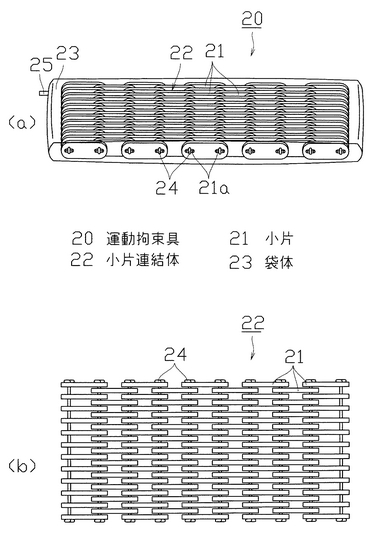
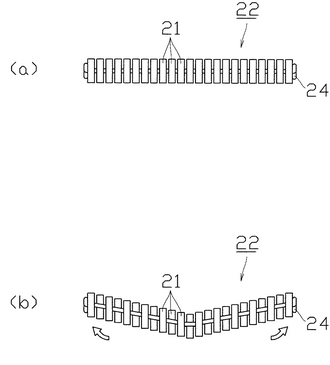
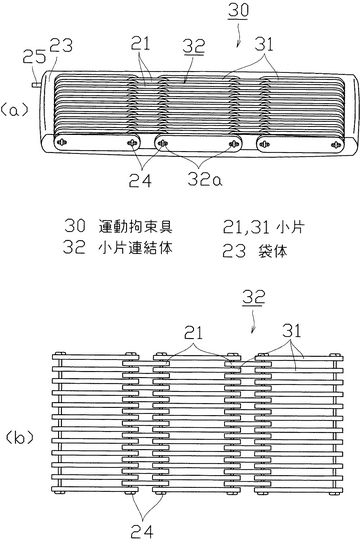
本発明の第2の実施の形態に係る運動拘束具20について図面に基づき説明する。この運動拘束具20は、図5(a)に示すように、前記運動拘束具10における小片連結体12を、厚さ方向に連接し位置をずらして、具体的には交互に並置するように糸状物24によって連結された小片21をこれら小片21の長手方向に複数連結し小片連結体22としたものである。これにより、小片連結体22の外面が広面積となり、対象物の表面を広範囲に渡って運動拘束具20を密接させ運動を拘束することができる。
【0029】
本運動拘束具20における小片21は、当該小片21の長手方向に離間した貫通孔21a、具体的には、小片21のなす長円形の2つの半円の中心近傍に位置する貫通孔21aを2つ備えており、貫通孔21aは小片21の長手方向をその長手方向とする長円形である。小片連結体22は、図5(b)に示すように、厚さ方向に連接する小片21が交互に並置するように、すなわち厚さ方向に隣接する小片21が互い違いに位置するように、貫通孔21aを挿通する複数の糸状物24によって連結されている。
【0030】
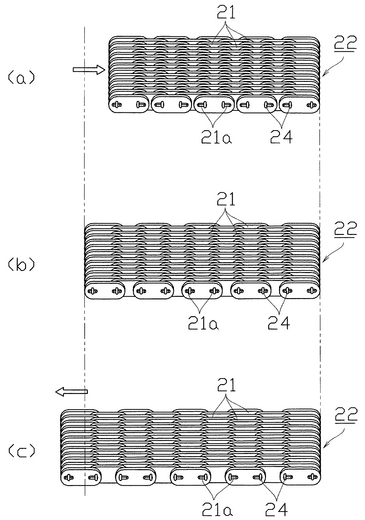
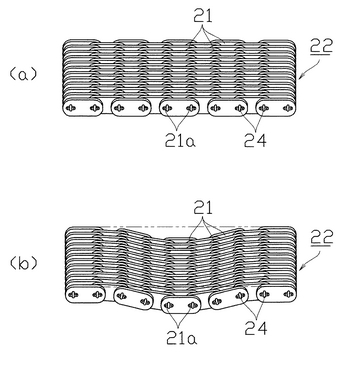
小片連結体22は全体として、図6(a)から図6(c)に示すように、その長手方向に伸縮変形が可能であるとともに、図7(a)及び図7(b)に示すように、小片21の面方向の曲げ変形が可能であり、図8(a)及び図8(c)に示すように、小片21の厚さ方向の曲げ変形が可能である。また、小片連結体22は全体として、これらの変形を組み合わせた変形が可能である。これらの変形は、小片連結体22に外力を加えることにより、その外力に応じてなされる。
【0031】
本運動拘束具20が運動を拘束しない場合には、袋体23の内部空間と外部の大気圧とが均衡した状態であり、この状態においては、一定容積の内部空間が維持されて、小片連結体22は外力により自在に変形可能な状態である。
【0032】
一方、本運動拘束具20が運動を拘束する場合には、小片連結体22が任意の形状である状態において、袋体23の内部圧が負圧となった状態であり、この状態においては、内部空間の容積が収縮されて、小片連結体22の隣接する小片21の外面同士、及び小片連結体22の外面と袋体23の内面とが密着し、これらの密着面に摩擦力が生じ、該摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。
【0033】
本運動拘束具20は、前記運動拘束具10に比べて、小片連結体22がより多様な形状をとることができるとともに、より大きな可動範囲を有するので、運動をより適切に拘束することができる。また、運動拘束具20は、前記運動拘束具10に比べて、より多様な対象物の表面に対して適切に密接させることができる。
【0034】
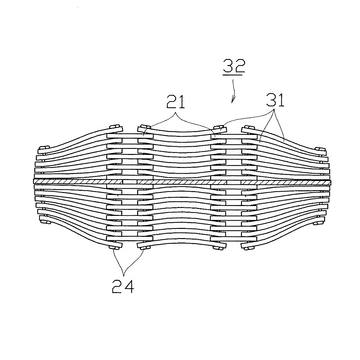
本発明の第2の実施の形態の変形に係る運動拘束具30について図面に基づき説明する。この運動拘束具30は、図9(a)及び図9(b)に示すように、前記小片21に対して長手方向に形状を延長するともに2つの貫通孔31a間の距離を延長させた小片31と、前記小片21とからなる小片連結体32からなるものである。この小片連結体32は、厚さ方向に小片21と小片31とが互いに隣接しており、小片21及び小片31がそれぞれ厚さ方向に同じ形状の小片21,31が位置するように配置されている。この小片連結体32は、前記小片連結体22に対して、より少ない枚数の小片によって外面が同じ面積の小片連結体32を構成することができるが、曲げ変形の曲率が小さくなる。また、各小片31が可撓性を有するものとすれば、図10に示すように、外力に対して小片31が撓み変形する。ポンプにより袋体103の内部空間を収縮することによって、外力に対して撓み変形した小片31の外面が、隣接する小片31の可動を妨げて外力に対する抗力を発生させ、拘束力が増す。なお、各小片31が可撓性を有することにより強度が劣るが、この欠点は、小片31の一部、例えば、小片連結体32の厚さ方向における中心付近に位置する小片31(図10において斜線を付した小片31)を硬い素材からなるものとすることにより補うことができる。
【0035】
また、運動拘束具20,30における小片連結体22,32は平面状であるが、例えば、小片連結体22,32を環状とすることにより、例えば、手首や肘等の関節の運動を拘束することができ、また、腕や脚等のサポータやギブスとして適したものとなる。特に、環状とした運動拘束具をギブスとして用いることにより、腕や脚等の対象となる表面に対して迅速に密接させることができ、筋肉の衰えによる形状の変化にも容易に対処することができ、取外しも容易であるという、従来のギブスに比べて大きな利点がある。また、3以上の貫通孔を設けた小片や、様々な形状からなる小片から構成することにより、分岐を有したり、様々な立体形状を備えた小片連結体とすることができ、運動を拘束する対象物に適切に合わせることが可能である。
【0036】
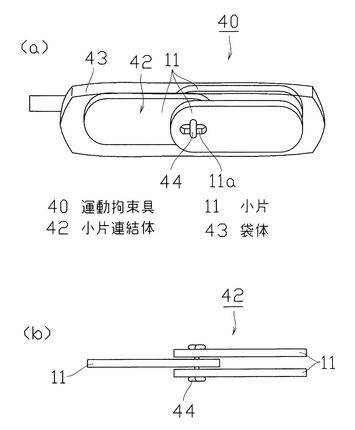
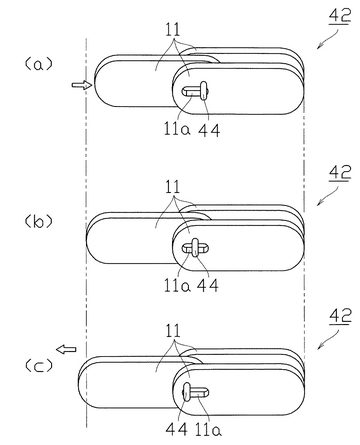
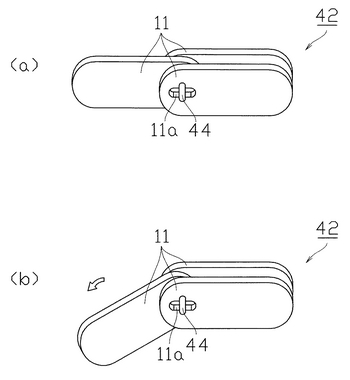
本発明の第3の実施の形態に係る運動拘束具40について図面に基づき説明する。この運動拘束具40は、前記運動拘束具10において、図11(a)及び図11(b)に示すように、前記小片連結体12を、3つの小片11が隣接する小片11に対して可動可能に連結した小片連結体42としたものである。小片連結体42は、厚さ方向に隣接する3つの小片11が交互に位置をずらして1本の糸状物44によって連結して形成されている。具体的には、小片連結体42は、3つの小片11が交互に並置するように、すなわちこれら小片11が互い違いに位置するように形成されている。小片連結体42を構成する各小片11は、隣接する小片11に対してその厚さ方向と直交する方向に位置ずれが可能である。そして、小片連結体42は全体として、図12(a)から図12(c)に示すように、その長手方向に伸縮変形が可能であり、図13(a)及び図13(b)に示すように、小片11の厚さ方向に直交する面内における回動が可能であり、小片連結体42は全体として、これらの変形を組み合わせた変形が可能である。これらの変形は、小片連結体42に外力を加えることにより、その外力に応じて変形がなされる。
【0037】
本運動拘束具40は、前記運動拘束具10と同様に、袋体43の内部空間と外部の大気圧とが均衡した状態においては、小片連結体42は外力により自在に運動可能な状態である。一方、袋体43の内部圧が負圧となった状態においては、内部空間の容積が収縮されて、小片連結体42を構成する各小片11同士、及び小片連結体42の外面と袋体43の内面とが密着し、これらの密着面に摩擦力が生じ、該摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。
【0038】
本運動拘束具40は、前記運動拘束具10に比べて、変形の自由度が少ないが、少ない構成部品により簡易に伸縮運動及び曲げ運動を拘束することができるため、例えば、ロボット等の関節を拘束するブレーキに適して用いることができる。
【0039】
なお、前記各小片11,21,31に設けた貫通孔11a,21a,31aを小片11,21,31の長手方向に長い長円形であるものとしたが、これに限定されるものではない。例えば、この貫通孔11a,21a,31aを前記貫通孔11a,21a,31aの長軸に等しい直径を有する円形であるものとしてもよい。これにより、小片は、隣接する小片に対して小片の幅方向により多くの移動範囲を得ることができる。そのため、図4や図8に示した、小片の厚さ方向の曲げ変形の曲率をより大きくすることができ、より多くの曲面に対して適切に密接させることができる。ただし、各小片の外周面と袋体の内面との各密着面間の距離が大きくなるので、運動を拘束する拘束力が低下することを考慮する必要がある。
【0040】
また、前記各小片11,21,31を長円形状としたが、これに限定されるものではない。ただし、各小片11,21,31を長円形状とすることにより、小片連結体12,22,32,42がいかなる形状に変形した場合であっても、これらの外面に鋭角な形状が現われることがないので、袋体13,23,43の内面に密着しても破損しにくい利点を有する。
【0041】
また、前記ポンプにより袋体13,23,43の内部空間を収縮するものとしたが、これに限定されるものではない。例えば、外部から袋体13,23,43全体に加圧することにより、内部空間を収縮させるものであってもよい。また、対向する小片11,21,31の隙間に薄い袋状体を配置し、運動を拘束させる場合には、この袋状体の内部空間に作動流体を流入させ、その内部空間を膨張させて小片11,21,31を圧迫させることにより、小片11,21,31同士の外面及び袋状体の外面と小片11,21,31の外面とを密着させ、これらの密着面に生じた摩擦力を運動を引き起こす外力に対する抗力とし、運動を拘束するものであってもよい。
【0042】
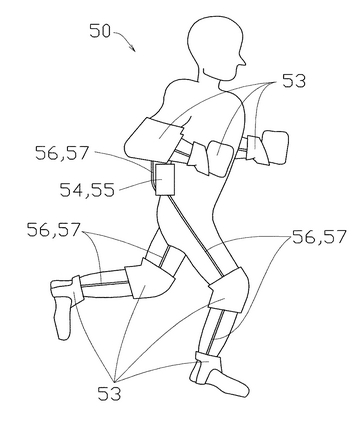
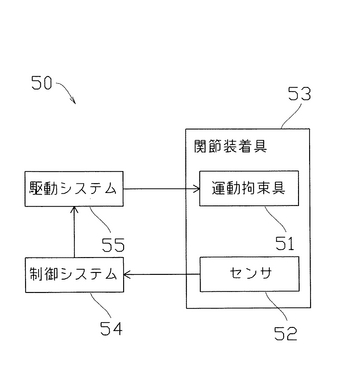
次に、本発明の実施の形態に係る擬似体験装置を、図面に基づいて具体的に説明する。本擬似体験装置50は、図14及び図15に示すように、前記実施の形態で示した各運動拘束具10,20,30,40のいずれか又はその組合わせによる運動拘束具51と、関節の角度、運動速度、及び抗力を検知して検知信号を発信するセンサ52とを備えた変形自在な関節装着具53と、前記検知信号を受けて拘束力を制御する制御システム54と、前記袋体13,23,43の内部空間を収縮することによりに拘束力を与えるための駆動システム55とを具備するものである。
【0043】
関節装着具53は、装着すべき関節に応じたサポータ状のものであり、各関節装着具53に設けられた運動拘束手段51は、手首、肘等の拘束すべき関節の運動を考慮して選定されている。
【0044】
また、本擬似体験装置50は、肘、膝等の複数の関節を拘束するので、前記各運動拘束手段を密着させるために統一した駆動システム55を備えている。該駆動システム55は、前記ポンプの他に、圧縮空気タンクもしくはプロセスガス源、バルブ等を備えてなり、制御システム54からの命令に従って、空気などの気体を配管56を通じて前記袋体に流出入させるものである。
【0045】
各関節装着具53に設けられた各センサ52は、関節の角度、運動速度、又は抗力を各々検知して検知信号を発信する周知かつ任意のセンサの組み合わせであり、各検知信号は信号線57を通じて制御システム54に入力される。
【0046】
このように構成された擬似体験装置50によれば、肘、膝等に装着された各関節装着具53の各センサ52により、関節の運動状態を検知して、検知信号を制御システム54に出力し、制御システム54は、各検知信号に基づいて所望の拘束力が発生するように駆動システム55を動作させる。例えば、運動拘束具51による抗力は摩擦力に基づくものだから、運動速度には比例しないので、速度センサ及び力センサの出力信号に基づいて、速度に比例して拘束力を増加させて、粘性を体感させるように駆動システム55を動作させる。これにより、各関節装着具53の運動拘束具51が装着者の各関節を拘束して、装着者に仮想空間での力を擬似体験させることができる。
【0047】
また、センサ52として運動拘束具51の内部空間の内圧を検知して検知信号する圧力センサを用いることも望ましい。該検知信号に基づいて所望の内圧となるように、制御システム54は駆動システム55を動作させる。これにより、各関節装着具53の運動拘束具51の拘束力を制御することができる。
【0048】
本擬似体験装置50は、極めて広範囲に利用されるものであり、例えば、地上において水の流体抵抗を拘束力により実現して、様々な環境での水泳体感をさせるようなスポーツトレーニングへの利用や、視覚表示装置と連携させてバーチャルリアリティ・ゲームへの利用ができる。さらに、センサ52が一定の閾値以上の外力又は速度を検知した場合に、関節装着具53により関節運動を完全に拘束するような制御を行なえば、スポーツ競技者、自動二輪運転者用等のプロテクタとして利用することもできる。
【0049】
なお、本発明に係る擬似体験装置は、前記擬似体験装置50のように、人体の各関節に関節装着具53を装着させるものに限定されず、様々な形態を採用することができる。例えば、特定の関節の運動のみを拘束するような構成としてもよく、その場合には、駆動システム及び制御システムをさらに小型化して、関節装着具と一体化してもよい。
【0050】
また、伸縮運動を拘束する運動拘束具51を、センサ52、制御システム54、及び駆動システム55が内蔵された擬似体験装置に複数設けて、人体の数箇所と連結することにより運動を拘束するような対向型のものを実現することもできる。又、前記擬似体験装置50に送受信システムを設けて、制御システム55に外部から指令を与えて運動の拘束を変化させることもできる。
【図面の簡単な説明】
【0051】
【図1】本発明の第1の実施の形態に係る運動拘束具10を示し、(a)は運動拘束具10の概略斜視図であり、(b)は運動拘束具10を構成する小片連結片12の上面図であり、(c)は可撓性を有する小片11からなる小片連結片12が外力により変形した状態を示す上面図である。
【図2】小片連結片12の概略斜視図であり、(a)は収縮した形状、(b)は基準の形状、(c)は伸長した形状を示す。
【図3】小片連結片12の概略斜視図であり、(a)は基準の形状、(b)は小片11の面方向に曲げ変形した形状を示す。
【図4】小片連結片12の側面図であり、(a)は基準の形状、(b)は小片11の厚さ方向に曲げ変形した形状を示す。
【図5】本発明の第2の実施の形態に係る運動拘束具20を示し、(a)は運動拘束具20の概略斜視図であり、(b)は運動拘束具20を構成する小片連結片22の上面図である。
【図6】小片連結片22の概略斜視図であり、(a)は収縮した形状、(b)は基準の形状、(c)は伸長した形状を示す。
【図7】小片連結片22の概略斜視図であり、(a)は基準の形状、(b)は小片21の面方向に曲げ変形した形状を示す。
【図8】小片連結片22の側面図であり、(a)は基準の形状、(b)は小片21の厚さ方向に曲げ変形した形状を示す。
【図9】本発明の第2の実施の形態の変形に係る運動拘束具30を示し、(a)は運動拘束具30の概略斜視図であり、(b)は運動拘束具30を構成する小片連結片32の上面図である。
【図10】可撓性を有する小片31からなる小片連結片32が外力により変形した状態を示す上面図である。
【図11】本発明の第3の実施の形態に係る運動拘束具40を示し、(a)は運動拘束具40の概略斜視図であり、(b)は運動拘束具40を構成する小片連結片42の上面図である。
【図12】小片連結片42の概略斜視図であり、(a)は収縮した形状、(b)は基準の形状、(c)は伸長した形状を示す。
【図13】小片連結片42の概略斜視図であり、(a)は基準の形状、(b)は小片11の面方向に曲げ変形した形状を示す。
【図14】本発明の実施の形態に係る擬似体験装置50の構成を示す模式図である。
【図15】擬似体験装置50の構成を示すブロック図である。
【図16】従来の運動拘束具100の外観を示す概略斜視図である。
【図17】従来の運動拘束具100のA―A断面を示す断面図であり、(a)は非運動拘束状態を、(b)は運動拘束状態を示す。
【図18】従来の別の運動拘束具200を示す概略斜視図である。
【図19】従来のさらに別の運動拘束具300の外観を示す一部破断概略斜視図である。
【図20】従来の運動拘束具300を示す断面図であり、(a)は非運動拘束状態を、(b)及び(c)は運動拘束状態を示す。
【符号の説明】
【0052】
10,20,30,40 運動拘束具
11,21,31 小片
11a,21a,31a 貫通孔
12,22,32,42 小片連結体
13,23,43 袋体
14,24,44 糸状物
50 擬似体験装置
51 運動拘束具
52 センサ
53 関節装着具
54 制御システム(制御手段)
【技術分野】
【0001】
本発明は、運動拘束具、詳しくは運動を可変的に拘束する運動拘束具、及びこれを用いた擬似体験装置に関するものである。
【背景技術】
【0002】
福祉やスポーツにおいて人間の運動能力を機械的に支援する目的で盛んな研究がなされており、実際に、高齢者や身障者等、身体機能に障害を有する者の筋肉を補助するサポータや、重力や空気抵抗等の人体に作用する力を擬似的に表現して、仮想現実的にスポーツトレーニングを行なうための擬似体験装置が存在する。これらには人体の関節等の運動を拘束するための運動拘束具が多く用いられている。例えば、特許文献1には、運動を可変的に拘束する運動拘束具が開示されている。
【0003】
特許文献1に開示された伸縮運動を可変的に拘束する運動拘束具100は、図16及び図17に示すように、外力が作用する作用端部101間に対向して架設された伸縮自在な伸縮部102と伸縮しない非伸縮部103とからなる2枚の伸縮拘束部材104と、該伸縮拘束部材104を内包し、作用端部101とともに容器として内部空間を形成する側周壁が伸縮自在な筒体105と、該筒体105の内部空間と連通された図示しないポンプとを備えたものである。
【0004】
この運動拘束具100が伸縮運動を拘束しない場合には、図17(a)に示すように、筒体105の内部空間が一定容積に維持され、対向する伸縮拘束部材104は離間した状態であり、運動拘束具100は、伸縮拘束部材104の伸縮部102の弾性により、外力が作用すれば矢印方向へ伸縮自在である。一方、伸縮運動を拘束する場合には、任意の伸縮状態において、筒体105の内部空間内にある気体をポンプにより排出し、筒体105の内圧を負圧として、図17(b)に示すように、2枚の伸縮拘束部材104を密着させる。これにより、2枚の伸縮拘束部材104の非伸縮部103の密着面に摩擦が生じ、摩擦力が伸縮運動を引き起こす外力に対する抗力となって、伸縮運動を拘束する。筒体105の内圧を制御することにより、密着面に生じる摩擦力を制御し、伸縮運動の拘束力を任意に変動させることができる。
【0005】
また、特許文献1に開示された曲げ運動を可変的に拘束する運動拘束具200は、図18に示すように、外力により曲げ変形し非伸縮な薄膜状の曲げ拘束部材201aを積層した曲げ拘束部材201が、容器である包袋202内に複数列設され、包袋202の内部空間と連通された図示しないポンプを備えたものである。
【0006】
この運動拘束具200が曲げ運動を拘束しない場合には、包袋202の内部空間が適量の気体で満たされて外部の大気圧と均衡し、各曲げ拘束部材201aは、他の曲げ拘束部材201aの接触面に曲げ運動を拘束されず、外力に応じて曲げ変形する。一方、曲げ運動を拘束する場合には、包袋202の内部空間から気体をポンプにより排出し、包袋202の内圧を負圧として、各曲げ拘束部材201aを密着させる。これにより、各曲げ拘束部材201aの密着面に摩擦力が生じ、摩擦力が曲げ運動を引き起こす外力に対する抗力となって、曲げ運動を拘束する。
【0007】
また、特許文献1に開示された伸縮運動、曲げ運動、捻り運動のすべてを拘束する運動拘束具300は、図19に示すように、多数の粒状体301と、内部空間に該粒状体301が装填された中空柱体状の容器302と、図示しないポンプとを備えたものである。容器302は、側周壁が軟質かつ非伸縮性で内部空間に流出入する空気を透過させない素材からなり、その両端が容易に変形しないプラスチック等からなるものである。
【0008】
この運動拘束具300が運動を拘束しない場合は、図20(a)に示すように、容器302の内部空間が適量の気体で満たされて、容器302の内圧と外部の大気圧とが均衡した状態にあり、運動拘束具300は、容器302の両端に作用する外力に応じて矢印に示すように伸縮、曲げ、捻り運動をする。一方、運動を拘束する場合は、任意の状態において、図20(b)及び図20(c)に示すように、容器302の内部空間内にある気体をポンプにより排出し、容器302内の内圧を負圧として、容器302の側周壁及び粒状体301を、任意の状態の運動拘束部材302の形状で密着させる。これにより、粒状体301同士、及び容器302の側周壁と粒状体との密着面に摩擦力が生じ、該摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。なお、容器302の内圧を制御することにより、すなわち、ポンプを制御することによって、前記摩擦力を任意に変化させることができ、該摩擦力の変化に応じて拘束力も変化するので、ポンプにより拘束力を制御することができる。
【特許文献1】特開2002−186683号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかし、上記従来の運動拘束具100においては、伸縮運動しか拘束できず、曲げ運動や捩り運動を拘束することができないという問題があった。また、上記従来の運動拘束具200においては、曲げ運動しか拘束できず、伸縮運動や捩り運動を拘束することができないという問題があった。また、上記従来の運動拘束具300においては、伸縮運動、曲げ運動、捩り運動を拘束することができるが、粒状体301同士、及び容器302の側周壁と粒状体301との密着面に生じる摩擦力によって外力に対する抗力を発生させているので、運動拘束具100,200に比べて密着面の面積が小さく、拘束力が小さいという問題があった。
【0010】
本発明は、かかる問題を解決すべくなされたものであり、伸縮運動、曲げ運動、捩り運動を大きな拘束力で拘束することができる運動拘束具、及びこれを用いた擬似体験装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、請求項1に記載の運動拘束具は、運動を可変的に拘束する運動拘束具であって、隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能なように連結した複数の小片からなる小片連結体と、該小片連結体を内部空間に収納し、外力により変形自在な中空状の袋体と、該袋体の内部空間を収縮することにより、前記小片の外面同士及び前記小片連結体の外面と前記袋体の内面とを密着させて、前記外力に対する抗力を発生させる密着手段と、を具備することを特徴としている。
【0012】
請求項2に記載の運動拘束具は、請求項1に記載の運動拘束具において、前記小片は厚さ方向に貫通する貫通孔を備え、前記小片連結体は厚さ方向に連接する小片が交互に位置をずらしてこれら小片の貫通孔を挿通する糸状物によって連結されていることを特徴としている。
【0013】
請求項3に記載の運動拘束具は、請求項1又は2に記載の運動拘束具において、前記小片は可撓性を有するものであることを特徴としている。
【0014】
請求項4に記載の運動拘束具は、請求項1から3の何れか1項に記載の運動拘束具において、前記密着手段は、前記袋体の内部空間を負圧とすることにより、当該袋体の内部空間を収縮することを特徴としている。
【0015】
請求項5に記載の擬似体験装置は、人体に作用する外力を仮想現実的に体験させる擬似体験装置であって、請求項1から4の何れか1項に記載の運動拘束具と、関節の角度、運動速度、又は抗力の少なくとも何れか1つを検出して検知信号を発信するセンサとを備えてなる関節装着具と、前記検知信号を受けて、前記運動拘束具に生ずる抗力を制御する制御手段と、を具備することを特徴としている。
【発明の効果】
【0016】
請求項1に記載の運動拘束具によれば、連結された複数の小片はそれぞれ隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能であるので、小片連結体は外力によって形状が可変となるため、袋体の内部空間に収納された小片連結体が任意形状をなす状態において、密着手段により袋体の内部空間を収縮させることより、外力に対する抗力を発生することができ、伸縮運動、曲げ運動、捩り運動を拘束することができる。また、密着手段により袋体の内部空間を収縮することによって、小片の外面同士及び小片連結体の外面と袋体の内面とが密着し、密着面に生じる摩擦力が外力に対する抗力を発生させるので、上記従来の運動拘束具300に比べて大きな拘束力を得ることができる。また、小片連結体の外面の形状が可変となるため、対象物の表面に運動拘束具を密接させることができる。
【0017】
請求項2に記載の運動拘束具によれば、小片は、その貫通孔と糸状体との間に隙間が存在することによって、隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能になるので、外力によって小片連結体の形状が可変となり、対象物の表面の曲面に対して密接させることができる運動拘束具を簡易な構成にて得ることができる。また、厚さ方向に連接する小片が交互に位置をずらして連結されているため、小片連結体の外面を広面積とすることが可能となり、対象物の表面を広範囲に渡って運動拘束具を密接させることができる。また、袋体の内面と密着する小片連結体の外面を広面積とすることが可能となり、大きな拘束力を得ることができる。
【0018】
請求項3に記載の運動拘束具によれば、小片が可撓性を有するため、密着手段により袋体の内部空間を収縮することによって、外力に対して撓み変形した小片の外面が、隣接する小片の可動を妨げて外力に対する抗力を発生させるので、より大きな拘束力を得ることができる。さらに撓みによって小片の外面同士が密着すれば、その密着面に生じる摩擦力が外力に対する抗力を発生させるので、より大きな拘束力を得ることができる。
【0019】
請求項4に記載の運動拘束具によれば、密着手段は袋体の内部空間を負圧とすることにより、袋体の内部空間を収縮することができるので、袋体の内部空間に存する気体を排出するポンプ等を用いることによって密着手段を容易に得ることができる。
【0020】
請求項5に記載の擬似体験装置によれば、前記何れかの運動拘束具を関節装着具が備えているので、形状が可変な運動拘束具を関節に密接させることができるため、人体との親和性が高く、また、伸縮運動、曲げ運動、捩り運動を拘束可能な運動拘束具によって運動を拘束するため、現実度の高い擬似体験装置を得ることができる。
【発明を実施するための最良の形態】
【0021】
本発明の第1の実施の形態に係る運動拘束具10について図面に基づき説明する。この運動拘束具10は、図1(a)に示すように、隣接する小片11に対して可動可能に連結した複数の小片11からなる小片連結体12と、該小片連結体12を内部空間に収納する中空状の袋体13と、該袋体13の内部空間を収縮する図示しないポンプと、からなるものである。
【0022】
各小片11は、合成樹脂等からなる薄厚の長円形の板状部材であり、その厚さ方向に貫通する貫通孔11aを備えている。該貫通孔11aは、小片11のなす長円形の一方の半円の中心近傍に位置しており、小片11の長手方向をその長手方向とする長円形である。各小片11は、図1(b)に示すように、貫通孔11aを挿通する1本の糸状物14によって厚さ方向に隣接する小片11と連結されている。糸状物14は、繭・綿・麻・毛などの繊維を細く長く引き伸ばし縒りをかけた糸や、合成樹脂等からなる非収縮性の糸状のもの、或いはゴム等からなる糸状の弾性体である。各小片11は、隣接する小片11に対して長手方向に所定距離、すなわち貫通孔11aの長手方向長さから糸状物14の直径との差からなる距離だけ移動可能であるとともに、幅方向に所定距離、すなわち貫通孔11aの幅から糸状物14の直径との差の2倍の距離だけ移動可能である。小片11は、これらの移動の組合わせ、すなわち隣接する小片11に対してその厚さ方向に直交する面内における平行移動が貫通孔11aと糸状物14との隙間からなる所定範囲内において可能である。また、小片11は、隣接する小片11に対してその厚さ方向に直交する面内における回動が可能である。従って、小片11は、隣接する小片11に対してその厚さ方向と直交する方向に位置ずれが可能である。小片連結体12は、厚さ方向に連接する小片11が交互に位置をずらして、これら小片11の貫通孔11aを挿通する1本の糸状物14によって連結されている。具体的には、小片連結体12は、厚さ方向に連接する小片11が交互に並置するように、すなわち、厚さ方向に隣接する小片11が互い違いに位置するように1本の糸状物14によって連結されている。これにより、厚さ方向に連接する小片11が1つおきに、それらの貫通孔11aに対する最離間部が反対方向に位置している。
【0023】
小片連結体12は全体として、図2(a)から図2(c)に示すように、その長手方向に伸縮変形が可能であるとともに、図3(a)及び図3(b)に示すように、小片11の面方向の曲げ変形が可能であり、図4(a)及び図4(b)に示すように、小片11の厚さ方向の曲げ変形が可能である。また、小片連結体12は、これらの変形を組み合わせた変形が可能である。これらの変形は、小片連結体12に外力を加えることにより、その外力に応じてなされる。
【0024】
前記袋体13は、軟質で内部空間に流出入する作動流体を透過させない素材からなり、外力により変形自在な中空状のものであり、その端部近傍には、図1(a)に示すように、内部空間に作動流体を流通させるための流通口15が設けられている。袋体13が小片連結体12を囲繞することにより、袋体13の内部空間に小片連結体12を収納するとともに、小片連結体12の形状を一定の範囲内で維持している。すなわち、小片連結体12は、袋体13によって厚さ方向に連接する小片11が交互に並置するように維持されている。前記ポンプは、袋体13の内部空間に流通させる作動流体を流通口15から流出入させるものである。なお、作動流体は、空気や水のように流動性を有するものであれば、特に限定されるものではない。
【0025】
本運動拘束具10が運動を拘束しない場合には、袋体13の内部空間が適量の作動流体で満たされて、袋体13の内部空間と外部の大気圧とが均衡した状態である。この状態においては、一定容積の内部空間が維持されて、小片連結体12は外力により自在に変形可能な状態である。例えば、静止した対象物の表面に運動拘束具10を押し当てた場合には、当該表面に追従して小片連結体12が変形するとともに、当該小片連結体12を収容する袋体13も自在に変形するので、対象物の表面に運動拘束具10を密接させることができる。
【0026】
本運動拘束具10が運動を拘束する場合には、小片連結体12が任意の形状である状態において、前記ポンプにより袋体13の内部空間にある作動流体が流出されて、袋体13の内部圧が負圧となった状態である。この状態においては、内部空間の容積が収縮されて、小片連結体12の隣接する小片11同士及び小片連結体12の外面(小片連結体12の外面となる小片11の外面の集合体)と袋体13の内面とがそれぞれ密着し、これらの密着面に摩擦力が生じ小片連結体12の形状が固定され、摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。なお、各小片11の周面、特に上面及び下面に鋸刃状などの凹凸形状を形成すれば、小片連結体12の外面と袋体13の内面との摩擦力が大きくなり、拘束力が増すので好ましい。また、各小片11を合成樹脂やゴム等の可撓性を有するものとすれば、図1(c)に示すように、外力に対して小片11が撓み変形する。ポンプにより袋体103の内部空間を収縮することによって、外力に対して撓み変形した小片11の外面が、隣接する小片11の可動を妨げて外力に対する抗力を発生させ、拘束力が増すので好ましい。さらに、間に位置する小片11を挟んで対向して位置する小片11の外面同士も密着させれば、その密着面に生じる摩擦力が外力に対する抗力を発生させ、さらに拘束力が増す。
【0027】
前記摩擦力は、それぞれ密着面に作用する法線方向の力(以下、法線力という。)に、密着面の摩擦係数を乗じたものであるから、法線力を制御することにより、該密着面に生じる摩擦力を制御することができる。すなわち、袋体13の内部圧を制御することにより、運動の拘束力を任意に変動させることができる。さらに、本運動拘束具10が運動を拘束した状態において、前記ポンプにより袋体13の内部空間に作動流体を流入させることより、運動の拘束を解放することができる。
【0028】
本発明の第2の実施の形態に係る運動拘束具20について図面に基づき説明する。この運動拘束具20は、図5(a)に示すように、前記運動拘束具10における小片連結体12を、厚さ方向に連接し位置をずらして、具体的には交互に並置するように糸状物24によって連結された小片21をこれら小片21の長手方向に複数連結し小片連結体22としたものである。これにより、小片連結体22の外面が広面積となり、対象物の表面を広範囲に渡って運動拘束具20を密接させ運動を拘束することができる。
【0029】
本運動拘束具20における小片21は、当該小片21の長手方向に離間した貫通孔21a、具体的には、小片21のなす長円形の2つの半円の中心近傍に位置する貫通孔21aを2つ備えており、貫通孔21aは小片21の長手方向をその長手方向とする長円形である。小片連結体22は、図5(b)に示すように、厚さ方向に連接する小片21が交互に並置するように、すなわち厚さ方向に隣接する小片21が互い違いに位置するように、貫通孔21aを挿通する複数の糸状物24によって連結されている。
【0030】
小片連結体22は全体として、図6(a)から図6(c)に示すように、その長手方向に伸縮変形が可能であるとともに、図7(a)及び図7(b)に示すように、小片21の面方向の曲げ変形が可能であり、図8(a)及び図8(c)に示すように、小片21の厚さ方向の曲げ変形が可能である。また、小片連結体22は全体として、これらの変形を組み合わせた変形が可能である。これらの変形は、小片連結体22に外力を加えることにより、その外力に応じてなされる。
【0031】
本運動拘束具20が運動を拘束しない場合には、袋体23の内部空間と外部の大気圧とが均衡した状態であり、この状態においては、一定容積の内部空間が維持されて、小片連結体22は外力により自在に変形可能な状態である。
【0032】
一方、本運動拘束具20が運動を拘束する場合には、小片連結体22が任意の形状である状態において、袋体23の内部圧が負圧となった状態であり、この状態においては、内部空間の容積が収縮されて、小片連結体22の隣接する小片21の外面同士、及び小片連結体22の外面と袋体23の内面とが密着し、これらの密着面に摩擦力が生じ、該摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。
【0033】
本運動拘束具20は、前記運動拘束具10に比べて、小片連結体22がより多様な形状をとることができるとともに、より大きな可動範囲を有するので、運動をより適切に拘束することができる。また、運動拘束具20は、前記運動拘束具10に比べて、より多様な対象物の表面に対して適切に密接させることができる。
【0034】
本発明の第2の実施の形態の変形に係る運動拘束具30について図面に基づき説明する。この運動拘束具30は、図9(a)及び図9(b)に示すように、前記小片21に対して長手方向に形状を延長するともに2つの貫通孔31a間の距離を延長させた小片31と、前記小片21とからなる小片連結体32からなるものである。この小片連結体32は、厚さ方向に小片21と小片31とが互いに隣接しており、小片21及び小片31がそれぞれ厚さ方向に同じ形状の小片21,31が位置するように配置されている。この小片連結体32は、前記小片連結体22に対して、より少ない枚数の小片によって外面が同じ面積の小片連結体32を構成することができるが、曲げ変形の曲率が小さくなる。また、各小片31が可撓性を有するものとすれば、図10に示すように、外力に対して小片31が撓み変形する。ポンプにより袋体103の内部空間を収縮することによって、外力に対して撓み変形した小片31の外面が、隣接する小片31の可動を妨げて外力に対する抗力を発生させ、拘束力が増す。なお、各小片31が可撓性を有することにより強度が劣るが、この欠点は、小片31の一部、例えば、小片連結体32の厚さ方向における中心付近に位置する小片31(図10において斜線を付した小片31)を硬い素材からなるものとすることにより補うことができる。
【0035】
また、運動拘束具20,30における小片連結体22,32は平面状であるが、例えば、小片連結体22,32を環状とすることにより、例えば、手首や肘等の関節の運動を拘束することができ、また、腕や脚等のサポータやギブスとして適したものとなる。特に、環状とした運動拘束具をギブスとして用いることにより、腕や脚等の対象となる表面に対して迅速に密接させることができ、筋肉の衰えによる形状の変化にも容易に対処することができ、取外しも容易であるという、従来のギブスに比べて大きな利点がある。また、3以上の貫通孔を設けた小片や、様々な形状からなる小片から構成することにより、分岐を有したり、様々な立体形状を備えた小片連結体とすることができ、運動を拘束する対象物に適切に合わせることが可能である。
【0036】
本発明の第3の実施の形態に係る運動拘束具40について図面に基づき説明する。この運動拘束具40は、前記運動拘束具10において、図11(a)及び図11(b)に示すように、前記小片連結体12を、3つの小片11が隣接する小片11に対して可動可能に連結した小片連結体42としたものである。小片連結体42は、厚さ方向に隣接する3つの小片11が交互に位置をずらして1本の糸状物44によって連結して形成されている。具体的には、小片連結体42は、3つの小片11が交互に並置するように、すなわちこれら小片11が互い違いに位置するように形成されている。小片連結体42を構成する各小片11は、隣接する小片11に対してその厚さ方向と直交する方向に位置ずれが可能である。そして、小片連結体42は全体として、図12(a)から図12(c)に示すように、その長手方向に伸縮変形が可能であり、図13(a)及び図13(b)に示すように、小片11の厚さ方向に直交する面内における回動が可能であり、小片連結体42は全体として、これらの変形を組み合わせた変形が可能である。これらの変形は、小片連結体42に外力を加えることにより、その外力に応じて変形がなされる。
【0037】
本運動拘束具40は、前記運動拘束具10と同様に、袋体43の内部空間と外部の大気圧とが均衡した状態においては、小片連結体42は外力により自在に運動可能な状態である。一方、袋体43の内部圧が負圧となった状態においては、内部空間の容積が収縮されて、小片連結体42を構成する各小片11同士、及び小片連結体42の外面と袋体43の内面とが密着し、これらの密着面に摩擦力が生じ、該摩擦力が運動を引き起こす外力に対する抗力となって、運動を拘束する。
【0038】
本運動拘束具40は、前記運動拘束具10に比べて、変形の自由度が少ないが、少ない構成部品により簡易に伸縮運動及び曲げ運動を拘束することができるため、例えば、ロボット等の関節を拘束するブレーキに適して用いることができる。
【0039】
なお、前記各小片11,21,31に設けた貫通孔11a,21a,31aを小片11,21,31の長手方向に長い長円形であるものとしたが、これに限定されるものではない。例えば、この貫通孔11a,21a,31aを前記貫通孔11a,21a,31aの長軸に等しい直径を有する円形であるものとしてもよい。これにより、小片は、隣接する小片に対して小片の幅方向により多くの移動範囲を得ることができる。そのため、図4や図8に示した、小片の厚さ方向の曲げ変形の曲率をより大きくすることができ、より多くの曲面に対して適切に密接させることができる。ただし、各小片の外周面と袋体の内面との各密着面間の距離が大きくなるので、運動を拘束する拘束力が低下することを考慮する必要がある。
【0040】
また、前記各小片11,21,31を長円形状としたが、これに限定されるものではない。ただし、各小片11,21,31を長円形状とすることにより、小片連結体12,22,32,42がいかなる形状に変形した場合であっても、これらの外面に鋭角な形状が現われることがないので、袋体13,23,43の内面に密着しても破損しにくい利点を有する。
【0041】
また、前記ポンプにより袋体13,23,43の内部空間を収縮するものとしたが、これに限定されるものではない。例えば、外部から袋体13,23,43全体に加圧することにより、内部空間を収縮させるものであってもよい。また、対向する小片11,21,31の隙間に薄い袋状体を配置し、運動を拘束させる場合には、この袋状体の内部空間に作動流体を流入させ、その内部空間を膨張させて小片11,21,31を圧迫させることにより、小片11,21,31同士の外面及び袋状体の外面と小片11,21,31の外面とを密着させ、これらの密着面に生じた摩擦力を運動を引き起こす外力に対する抗力とし、運動を拘束するものであってもよい。
【0042】
次に、本発明の実施の形態に係る擬似体験装置を、図面に基づいて具体的に説明する。本擬似体験装置50は、図14及び図15に示すように、前記実施の形態で示した各運動拘束具10,20,30,40のいずれか又はその組合わせによる運動拘束具51と、関節の角度、運動速度、及び抗力を検知して検知信号を発信するセンサ52とを備えた変形自在な関節装着具53と、前記検知信号を受けて拘束力を制御する制御システム54と、前記袋体13,23,43の内部空間を収縮することによりに拘束力を与えるための駆動システム55とを具備するものである。
【0043】
関節装着具53は、装着すべき関節に応じたサポータ状のものであり、各関節装着具53に設けられた運動拘束手段51は、手首、肘等の拘束すべき関節の運動を考慮して選定されている。
【0044】
また、本擬似体験装置50は、肘、膝等の複数の関節を拘束するので、前記各運動拘束手段を密着させるために統一した駆動システム55を備えている。該駆動システム55は、前記ポンプの他に、圧縮空気タンクもしくはプロセスガス源、バルブ等を備えてなり、制御システム54からの命令に従って、空気などの気体を配管56を通じて前記袋体に流出入させるものである。
【0045】
各関節装着具53に設けられた各センサ52は、関節の角度、運動速度、又は抗力を各々検知して検知信号を発信する周知かつ任意のセンサの組み合わせであり、各検知信号は信号線57を通じて制御システム54に入力される。
【0046】
このように構成された擬似体験装置50によれば、肘、膝等に装着された各関節装着具53の各センサ52により、関節の運動状態を検知して、検知信号を制御システム54に出力し、制御システム54は、各検知信号に基づいて所望の拘束力が発生するように駆動システム55を動作させる。例えば、運動拘束具51による抗力は摩擦力に基づくものだから、運動速度には比例しないので、速度センサ及び力センサの出力信号に基づいて、速度に比例して拘束力を増加させて、粘性を体感させるように駆動システム55を動作させる。これにより、各関節装着具53の運動拘束具51が装着者の各関節を拘束して、装着者に仮想空間での力を擬似体験させることができる。
【0047】
また、センサ52として運動拘束具51の内部空間の内圧を検知して検知信号する圧力センサを用いることも望ましい。該検知信号に基づいて所望の内圧となるように、制御システム54は駆動システム55を動作させる。これにより、各関節装着具53の運動拘束具51の拘束力を制御することができる。
【0048】
本擬似体験装置50は、極めて広範囲に利用されるものであり、例えば、地上において水の流体抵抗を拘束力により実現して、様々な環境での水泳体感をさせるようなスポーツトレーニングへの利用や、視覚表示装置と連携させてバーチャルリアリティ・ゲームへの利用ができる。さらに、センサ52が一定の閾値以上の外力又は速度を検知した場合に、関節装着具53により関節運動を完全に拘束するような制御を行なえば、スポーツ競技者、自動二輪運転者用等のプロテクタとして利用することもできる。
【0049】
なお、本発明に係る擬似体験装置は、前記擬似体験装置50のように、人体の各関節に関節装着具53を装着させるものに限定されず、様々な形態を採用することができる。例えば、特定の関節の運動のみを拘束するような構成としてもよく、その場合には、駆動システム及び制御システムをさらに小型化して、関節装着具と一体化してもよい。
【0050】
また、伸縮運動を拘束する運動拘束具51を、センサ52、制御システム54、及び駆動システム55が内蔵された擬似体験装置に複数設けて、人体の数箇所と連結することにより運動を拘束するような対向型のものを実現することもできる。又、前記擬似体験装置50に送受信システムを設けて、制御システム55に外部から指令を与えて運動の拘束を変化させることもできる。
【図面の簡単な説明】
【0051】
【図1】本発明の第1の実施の形態に係る運動拘束具10を示し、(a)は運動拘束具10の概略斜視図であり、(b)は運動拘束具10を構成する小片連結片12の上面図であり、(c)は可撓性を有する小片11からなる小片連結片12が外力により変形した状態を示す上面図である。
【図2】小片連結片12の概略斜視図であり、(a)は収縮した形状、(b)は基準の形状、(c)は伸長した形状を示す。
【図3】小片連結片12の概略斜視図であり、(a)は基準の形状、(b)は小片11の面方向に曲げ変形した形状を示す。
【図4】小片連結片12の側面図であり、(a)は基準の形状、(b)は小片11の厚さ方向に曲げ変形した形状を示す。
【図5】本発明の第2の実施の形態に係る運動拘束具20を示し、(a)は運動拘束具20の概略斜視図であり、(b)は運動拘束具20を構成する小片連結片22の上面図である。
【図6】小片連結片22の概略斜視図であり、(a)は収縮した形状、(b)は基準の形状、(c)は伸長した形状を示す。
【図7】小片連結片22の概略斜視図であり、(a)は基準の形状、(b)は小片21の面方向に曲げ変形した形状を示す。
【図8】小片連結片22の側面図であり、(a)は基準の形状、(b)は小片21の厚さ方向に曲げ変形した形状を示す。
【図9】本発明の第2の実施の形態の変形に係る運動拘束具30を示し、(a)は運動拘束具30の概略斜視図であり、(b)は運動拘束具30を構成する小片連結片32の上面図である。
【図10】可撓性を有する小片31からなる小片連結片32が外力により変形した状態を示す上面図である。
【図11】本発明の第3の実施の形態に係る運動拘束具40を示し、(a)は運動拘束具40の概略斜視図であり、(b)は運動拘束具40を構成する小片連結片42の上面図である。
【図12】小片連結片42の概略斜視図であり、(a)は収縮した形状、(b)は基準の形状、(c)は伸長した形状を示す。
【図13】小片連結片42の概略斜視図であり、(a)は基準の形状、(b)は小片11の面方向に曲げ変形した形状を示す。
【図14】本発明の実施の形態に係る擬似体験装置50の構成を示す模式図である。
【図15】擬似体験装置50の構成を示すブロック図である。
【図16】従来の運動拘束具100の外観を示す概略斜視図である。
【図17】従来の運動拘束具100のA―A断面を示す断面図であり、(a)は非運動拘束状態を、(b)は運動拘束状態を示す。
【図18】従来の別の運動拘束具200を示す概略斜視図である。
【図19】従来のさらに別の運動拘束具300の外観を示す一部破断概略斜視図である。
【図20】従来の運動拘束具300を示す断面図であり、(a)は非運動拘束状態を、(b)及び(c)は運動拘束状態を示す。
【符号の説明】
【0052】
10,20,30,40 運動拘束具
11,21,31 小片
11a,21a,31a 貫通孔
12,22,32,42 小片連結体
13,23,43 袋体
14,24,44 糸状物
50 擬似体験装置
51 運動拘束具
52 センサ
53 関節装着具
54 制御システム(制御手段)
【特許請求の範囲】
【請求項1】
運動を可変的に拘束する運動拘束具であって、
隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能なように連結した複数の小片からなる小片連結体と、
該小片連結体を内部空間に収納し、外力により変形自在な中空状の袋体と、
該袋体の内部空間を収縮することにより、前記小片の外面同士及び前記小片連結体の外面と前記袋体の内面とを密着させて、前記外力に対する抗力を発生させる密着手段と、
を具備することを特徴とする運動拘束具。
【請求項2】
前記小片は厚さ方向に貫通する貫通孔を備え、前記小片連結体は厚さ方向に連接する小片が交互に位置をずらしてこれら小片の貫通孔を挿通する糸状物によって連結されていることを特徴とする請求項1に記載の運動拘束具。
【請求項3】
前記小片は可撓性を有するものであることを特徴とする請求項1又は2に記載の運動拘束具。
【請求項4】
前記密着手段は、前記袋体の内部空間を負圧とすることにより、当該袋体の内部空間を収縮することを特徴とする請求項1から3の何れか1項に記載の運動拘束具。
【請求項5】
人体に作用する外力を仮想現実的に体験させる擬似体験装置であって、
請求項1から4の何れか1項に記載の運動拘束具と、関節の角度、運動速度、又は抗力の少なくとも何れか1つを検出して検知信号を発信するセンサとを備えてなる関節装着具と、
前記検知信号を受けて、前記運動拘束具に生ずる抗力を制御する制御手段と、
を具備することを特徴とする擬似体験装置。
【請求項1】
運動を可変的に拘束する運動拘束具であって、
隣接する小片に対して、その厚さ方向と直交する方向に位置ずれ可能なように連結した複数の小片からなる小片連結体と、
該小片連結体を内部空間に収納し、外力により変形自在な中空状の袋体と、
該袋体の内部空間を収縮することにより、前記小片の外面同士及び前記小片連結体の外面と前記袋体の内面とを密着させて、前記外力に対する抗力を発生させる密着手段と、
を具備することを特徴とする運動拘束具。
【請求項2】
前記小片は厚さ方向に貫通する貫通孔を備え、前記小片連結体は厚さ方向に連接する小片が交互に位置をずらしてこれら小片の貫通孔を挿通する糸状物によって連結されていることを特徴とする請求項1に記載の運動拘束具。
【請求項3】
前記小片は可撓性を有するものであることを特徴とする請求項1又は2に記載の運動拘束具。
【請求項4】
前記密着手段は、前記袋体の内部空間を負圧とすることにより、当該袋体の内部空間を収縮することを特徴とする請求項1から3の何れか1項に記載の運動拘束具。
【請求項5】
人体に作用する外力を仮想現実的に体験させる擬似体験装置であって、
請求項1から4の何れか1項に記載の運動拘束具と、関節の角度、運動速度、又は抗力の少なくとも何れか1つを検出して検知信号を発信するセンサとを備えてなる関節装着具と、
前記検知信号を受けて、前記運動拘束具に生ずる抗力を制御する制御手段と、
を具備することを特徴とする擬似体験装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2006−94983(P2006−94983A)
【公開日】平成18年4月13日(2006.4.13)
【国際特許分類】
【出願番号】特願2004−283005(P2004−283005)
【出願日】平成16年9月29日(2004.9.29)
【出願人】(593006630)学校法人立命館 (359)
【公開日】平成18年4月13日(2006.4.13)
【国際特許分類】
【出願日】平成16年9月29日(2004.9.29)
【出願人】(593006630)学校法人立命館 (359)
[ Back to top ]