
運動機能検査システム
運動機能検査システムと、信号の捕捉及び集収方法とそれらの信号を運動機能検査の対応するパラメータへ処理する方法を提供する。特に前記システム及び方法はTinetti検査により規定されるようなバランスの評価期間中の被験者の動作の定量化に関している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は運動機能検査システムと、信号の捕捉及び集収方法とそれらの信号を運動機能検査の対応するパラメータへ処理する方法に関する。特に前記システム及び方法はTinetti検査により規定されるバランスの評価中の被験者の動作の定量化に関する。
【背景技術】
【0002】
Tinetti検査は年配者または障害者の姿勢の制御と運動能力の評価に広く使用されている。この検査は日常生活からの一連の簡単な動作に基づいており、規定された順序で被験者が行わなければならない。被験者の動作は医師または理学療法専門医が予め規定された基準スケールにしたがって数値のスコアで判断を下すことによって評価される。
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述の説明から、Tinetti検査の結果は、正に検査官の評価基準に従うので非常に主観的である。それ故、検査が歪められているか、または前記主観的特性によって変更される可能性があることが明白である。客観的な検査だけが均等な評価基準と、さらに異なる評価、即ち同じ患者について異なるスタッフが行う評価と、異なる患者について同じスタッフが行う評価との両評価を比較する可能性を確実にできる。
【0004】
それ故、本発明の中心的な問題は、客観的評価の実現を可能にする運動機能検査システムを提供することである。
【0005】
それ故、本発明の第1の主題はTinetti検査中に被験者の動作および/または彼等の姿勢制御に相関する生物医学的パラメータおよび/または機能の測定を利用する運動機能検査システムを提供することである。
【0006】
本発明の第2の主題は、信号の捕捉及び集収方法と、前記運動機能検査システムにより与えられるような運動機能検査の対応するパラメータへそれらの信号を処理する方法を提供することである。
【課題を解決するための手段】
【0007】
このような問題は特許請求の範囲によりカバーされる運動機能検査システムにより解決される。
【0008】
前述のシステム及び方法の更なる特徴と利点は、添付図面を参照して、限定ではない例示で与えられている本発明の1実施形態についての以下の説明から明白になるであろう。
【発明を実施するための最良の形態】
【0009】
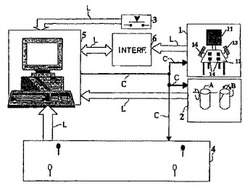
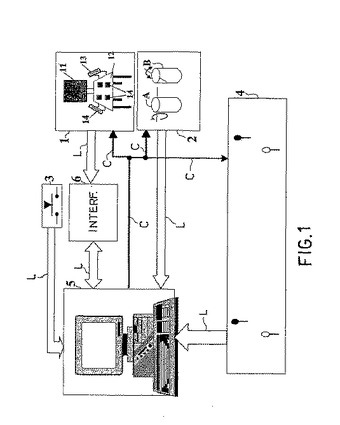
図1に概略して表示されている運動機能検査システムは、相互に動作可能に接続されている種々の機能ユニットを具備している。特に前記システムは運動機能検査用の椅子1と、前記運動機能検査を受ける人の胴の傾斜の検出に適している手段2と、関連する電源を有するボタン3(マーカー)と、少なくとも1つの光検出器対4と、電子データプロセッサ5と、インターフェース6とを具備している。図1では、アナログおよび/またはデジタル信号線Lと電力ケーブルCも示されている。
【0010】
椅子1は肘掛を有するタイプであり、背もたれ11(随意選択的)と、シート12と、2つの肘掛13とを備えている。背もたれ11とシート12は実質的に剛性である。さらにシート12と肘掛13にはフレキシブルな支持体上で、それぞれ少なくとも1つの薄い通常のタイプの圧力センサ14を取付けられている。薄いカバーが前記少なくとも1つの圧力センサ14を覆って保護し、同時にシート1をより快適にするように設けられてもよい。各圧力センサ14は検査を受ける被験者が加える圧力と相関された電気信号を発生するように構成されている。好ましくは、前記圧力センサ14は2つのフレキシブルなポリマーシート間に位置する感知膜から作られた薄い抵抗センサによって表される。通常、次の公称上の特性、即ち500kPaのフルスケール、2500kPaの最大の適用可能な圧力、20msよりも小さい応答時間、シート及び肘掛の寸法に適合するような感知領域及び形状が適切であると考えられる。
【0011】
特に、例示的な実施形態では、シート12上において、前記少なくとも1つのセンサは2×2のマトリックスで配置されているインターリンク・エレクトロニクス・ヨーロッパ FSR154タイプの4個の方形センサにより示され、各肘掛13では、インターリンク・エレクトロニクス・ヨーロッパ FSR648ASタイプの細長い形の長方形センサが存在し、その長い側面は肘掛自体の軸と整列している。前記センサ14は次の公称特性を有している。
−測定範囲:69Paから689kPa;
−最大圧力:約3400kPa;
−応答時間:約2ms;
−典型的なロードフリー抵抗:0.4MΩ/cm2、これはロードの増加と共に漸進的に減少する。;
−感知領域:約14cm2
【0012】
この例示的な実施形態では、さらに前記センサ14はケーブルおよび相対的なコネクタを介して電子データプロセッサ5へ接続され、これらのケーブルおよびコネクタは全体的に通常のものであるので図示しないがセンサにより発生される信号の伝送とセンサ自体の電力の供給に適している。さらにケーブルコネクタはキャパシタと共にシート12の下に位置されることが有効であり、キャパシタ自体も通常のものであるので図示しないが、センサのDC電源の電圧を濾波する役目を有している。さらに、1以上の集積回路が存在し、適切なローパスエイリアス除去フィルタを生成するのに十分な機能増幅器の総数(前記例示的な実施形態では4)に対して、その後続の圧力信号のアナログデジタル変換を考慮する。さらに、センサ14の電源は例えばシート12および/または肘掛13の下に位置するバッテリにより実現されることができる。
【0013】
人の胴の傾斜の検出に適切な手段2は胴に適合されるような傾斜計の対2または恐らく単軸或いは双軸の加速度計を具備していることが好ましい。
【0014】
前記傾斜計の対2は前−後平面の胴の傾斜を測定するように指定された第1の傾斜計Aと、中間の横方向平面の胴の傾斜を測定するように指定された第2の傾斜計Bにより表されている。通常、傾斜計の対は少なくとも±25゜のフルスケールであるべきである。加速度計が使用される場合、手順は類似している。
【0015】
好ましくは、前記1対の傾斜計は、以下の公称特性を有する図2に示されているタイプのミドリプレジションPMP−S30TXタイプの2つの機械−電気傾斜計により表される。
−供給電圧(V0):直流4.5乃至8V;
−フルスケール:±30゜;
−対応する出力電圧範囲:2.5V(オフセット)±1.1V、供給電圧V0=8V;
−線形性:±1%FS;
−(ヒステリシスを含む)感度:0.03゜よりも良好;
−出力感度:0.00225V0±2%V/゜(20ボルトのV0)
−応答時間:約0.2s;
−寸法:直径=20mm、高さ=40mm;
−重量:35グラム;
−200CSのシリコンオイルでバッファリング
【0016】
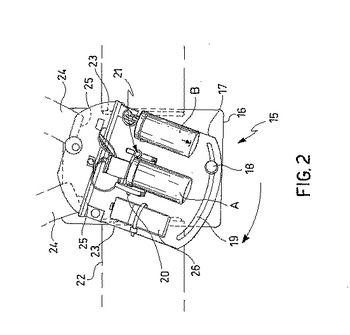
傾斜計の対2のフルスケールが±45゜よりも小さい場合、傾斜計の対2が例えば図2で概略的に表されているようにポリカーボネートの支持体のような適当な支持体15上に設けられることを助言する。通常、支持体15は傾斜計AおよびBの最大の感度の対応する平面が相互に垂直であるように構成されなければならない。傾斜計AとBの対が個人の胸部に固定されるとき、以下よく説明するように、前述の2つの平面は前記個人の中間平面および前部平面に実質的に平行でなければならない。傾斜計が患者の胸部に適用され、彼らが普通の直立した姿勢を取るとき、問題の支持体は重力の方向にしたがって各傾斜計の最大感度の平面の方向付けを可能にしなければならない。このような整列は検査(以下を参照)の開始前に各被験者について実行され、センサの力学の最良の使用を可能にする目的と、胴の更に広い傾斜を必要とする動作を実行する期間中に、測定の飽和の危険性を制限する目的とを有する。この要求は測定範囲が十分に広く、既に説明したように±45゜を超えるならば生じることは無い。
【0017】
この理由で、支持体15は既に繰返し説明した例示的な実施形態のように2つの平行なプレート、即ち内側プレート16と外側プレート17とにより構成され、2つの平行なプレートはそれらの平面に垂直な軸を中心に相互に関して回転するように接続されている。内側プレート16は支持体が被験者に取付けられるとき前記被験者の身体に接触して配置され、一方、プレート17は前記身体に関して外側である。
【0018】
特に、内側プレート16および外側プレート17は前記例示的な実施形態では、実質的に長方形であり、図2で示されているように、前記接続は前記プレート16と17の一方の側面の近くで行われる。接続手段は内側プレート16に固定されているピボット18と、外側プレート17に形成された円形アーチ形状で延在する細いウィンドウ19とを具備している。ウィンドウ19は内側プレート16を覆って外側プレート17の回転を可能にするように前記ピボット18と結合している。この回転は、一度被験者が以下の点に関して、装置(弾性を有するストラップ22と支持バンド24)を使用して傾斜計AとBを装着すると、重力の方向に関して傾斜計Bの最大の感度の平面が整列するのを可能にする。傾斜計Aの最大の感度の対応する平面の整列は、傾斜計Aの軸に垂直な軸20を中心として傾斜計自体が自由に振動する状態にし、その後このようにして想定される位置にこの傾斜計Aをロック螺子21を使用して固定することにより行われる。
【0019】
内側プレート16はその後、その両側に形成された2つのボタンホール23を使用して、弾性を有するストラップ22上に移動可能に取付けられる。さらに、前記内側プレート16はまた2つの対応するボタンホール25を通して2つの支持バンド24により結合される。ストラップ22と支持バンド24の役目は後述するように、人の胴のレベルに1対の傾斜計2を装着することを可能にすることである。
【0020】
外側プレート17は傾斜計AとBの実際の支持体を構成している。図2に示されているように、内側プレート16に関して反対方向で回転するその表面上には、前述したように前述した軸20および関連する保持螺子21を通して傾斜計Aが取り付けられ、また前記外側プレート17に強固に固定されている傾斜計Bと、DC供給電圧の濾波のためのキャパシタ(図示せず)と、出力バッファとしておよび後続する傾斜計からの信号のアナログデジタル変換を考慮したエイリアス除去フィルタとして使用される適切な数(前記例示的な実施形態では4つ)の演算増幅器を含んでいる1以上の集積回路(図示しないがIC)とが取り付けられている。
【0021】
好ましくは、適切な電圧及び充電状態のバッテリ26もまた、傾斜計の潜在的な独立したエネルギ源として外側プレート17に設けられることができ、それには供給のために必要な回路およびスイッチ(図示せず)を備え、それによってエネルギ源と、前述のバッテリと、または電子データプロセッサ5からまたはその他の電源から得られる外部電源として選択されることができる。
【0022】
ボタン3は全体的に一般的な手動またはペダル動作であり、データプロセッサ5または独立したバッテリ(例えばタイプAAペンライト)から低電圧電力が供給されることができる。これは運動機能検査を行う物理療法医または理学療法専門医により操作され、運動機能検査の種々の段階の開始および恐らく終了を示すマーカーとして使用されることができる。ボタン3は、押されるとき、定電圧信号を発生し、これはシステムの他のコンポーネントにより発生される信号と共に電子データプロセッサ5により捕捉される。
【0023】
ボタン3は電子データプロセッサ5自体からの例えばキーボードまたはマウスのコマンドのような検査の各段階の開始及び終了のマークを可能にする任意のその他の手段により置換されることができることに注意すべきである。結果として、検査の種々の段階は電子データプロセッサ5により得られる信号の正確な解釈と解析とを目的として、曖昧さがなく相互に弁別されることができる。
【0024】
1つの好ましい実施形態によれば、運動機能検査システムは先の実施形態の代わりにまたはそれに加えて、被験者が受けなければならない検査ルートに沿って配置されている少なくとも1対の光検出器4を具備することができる。特に、前記光検出器は光路に反射器が挿入されるか挿入されずに光エミッタと光受信機の組合せにより表されるか、または被験者の通過を検出することのできるその他の通常の装置によって表される。前記検出器はそれぞれ出発時間及び到着時間を記録する方法で、ルートの開始及び終了点に位置されることが好ましい。
【0025】
電子データプロセッサ5は例えば全体的に通常のデスクトップ(PC)または(中央処理装置CPUおよび関連するRAMおよびROMメモリを含む)ポータブルパーソナルコンピュータにより構成され、同様に通常の周辺機器(HDD、FDD、CD−ROMドライブ、可能なCD−ROMライター、グラフィックプリンタ)とユーザインターフェース(特にキーボード及びマウスまたは等価装置)が設けられる。
【0026】
パーソナルコンピュータ5にはデータ捕捉モジュール(図示せず)が設けられ、全ての関連する信号を捕捉するのに十分な数で、少なくとも12ビットのA/D入力ポートが設けられているアナログデジタル変換カードを具備している。本発明の例示された実施形態にしたがって少なくとも後続する信号、即ち2つの各傾斜計の信号と、恐らく光検出器4の各2つの対のそれぞれの信号と、ボタン3の信号と、実際に使用される圧力センサ14の数に等しい複数の付加的な信号とが関連する。好ましくは、同一のデータ捕捉モジュールには恐らく電力を傾斜計2、(独立して供給されないならば)ボタン3、圧力センサ14へ供給するために使用されるデジタル出力ポートが設けられ、一方、光検出器4は通常、バッテリまたは主電源から独立した電源を必要とする。同様に、同一のデータ捕捉モジュールには例えばシステム全体の良好な動作に適切な、または必要と見られるその他の可能なコマンドに対して使用されるTTLタイプのデジタル入力ポートが設けられる。前記入力及び出力ポートはセクタで広く知られている装置であるので図に示されていない。このデータ捕捉モジュールは、そのアナログデジタル変換機能のおかげで、特に圧力センサ14、傾斜計AおよびB、ボタン3、光検出器4から発生する信号のサンプリングを可能にする。このようなサンプルリングされた信号は例えば傾斜計AおよびBの場合には、Tinetti検査にしたがって被験者が行う動作期間中の関連する胴の傾斜測定の結果を表す。60進法その他の度数の角測定単位で適切に表されるそれらの値のシーケンスは、前記検査期間中に、中間および前部平面において垂直軸に関する胴の傾斜角度の時間にわたる変化を表している。同様に、圧力センサ14により発生される電気信号は時間の関数としてシート12と肘掛13上で被験者が与える圧力値を測定する。ボタン3により発生される信号は運動機能検査の各異なる段階のそれぞれの開始及び終了の正確な瞬間を示すインパルスにより表される。同様に、光検出器4により放出される信号は構想されたルートの開始および終了地点或いは光センサが恐らく配置される他の地点で、被験者が検出器自体の検出線を横切る正確な瞬間に発生されるインパルスによって表される。全ての前述の採取された信号は、被験者および必要であると考えられる検査の識別データと共に、パーソナルコンピュータ5自体または別のコンピュータでセットアップされるデータベース中に有効に組織化されるか、他のコンピュータ媒体に記憶されるか、関連性があるか適切であると考えられる他の形態に有効に組織化される。
【0027】
先の地点に関して採取された信号は、検査の実行中に被験者の動作を客観的に特徴付けするために適切な数値のパラメータを得る目的で、後に示す規準及び方法にしたがって処理される。このようにして得られた全てのパラメータはその後、予め設定された基準パラメータと比較される。この比較によって、医師はTinetti検査から得られるように、患者の姿勢制御及びバランスの正確で完全に客観的な評価に対して有効な客観情報を得るであろう。
【0028】
前述したように捕捉されたサンプル信号の処理および前記数値パラメータの計算用のプログラムは前述のパーソナルコンピュータ5または別のパーソナルコンピュータのRAMメモリ内にロードされる。同じプログラムはフロッピー(登録商標)ディスク、CD−ROMまたは例えば電気通信ネットワークによる送信を行う方法のようなセクタ内で知られているその他の方法によって、前述のパーソナルコンピュータ5または他のパーソナルコンピュータに対して利用可能にされる。
【0029】
パーソナルコンピュータ5または他のパーソナルコンピュータの中央処理装置は前記サンプル信号を処理するプログラムの命令を実行するような装置である。
【0030】
さらに、前記システムは圧力信号の捕捉と、例えばデジタル出力ポートを通して制御されるBJTスイッチによる他のセンサからの信号の捕捉をエネーブル/ディスエーブルするために使用されるインターフェース6を具備することができる。好ましくは、このインターフェース6はパーソナルコンピュータに関して外部に位置される。その代わりに、捕捉される信号のソフトウェアを介しての選択にしたがうことができる。
【0031】
付加的な異なる実施形態によれば、本発明の運動機能検査システムは先の実施形態の代わりにまたはそれに加えて、傾斜計センサ2により発生されてパーソナルコンピュータ5へ送られる信号の送信が、検査の実行中の被験者の動作の完全な自由を確実にし、接続ケーブルにより生じる任意の可能な障害を防止する目的で、無線技術によって行われることも考えられる。この場合、傾斜計AとBは、例えば単一チャンネル或いは2チャンネル(図示せず)の送信モジュールに接続され、傾斜計センサ2自体により発生される信号の処理(恐らくサンプリングおよびA/D変換、恐らく操作、変調、増幅及びその他)を実行し、それによってこれらが自由空間を介する放射に対して適するようにし、適切なアンテナにより利用される。結果として、捕捉モジュールには付加的なアンテナと受信機モジュール(図示せず)が設けられ、それによって受信される放射された信号の必要な処理(復調、デマルチプレクス、その他)を実行する。例えばセクタ内で知られているタイプの無線周波数システムを使用することが可能である。1つの特定のシステムは例えば前記信号および市場で入手可能なコンポーネントの送信に適切な特性を有するブルートュース(登録商標)1.1国際標準にしたがって、1実施形態により表されることができる。
【0032】
前述の無線技術は圧力センサ14と光検出器4に対しても適用されることに注意すべきである。
【0033】
本発明の第2の目的は運動機能検査のパラメータの検出、集収、処理方法を提供することであり、この方法は一連の以下の段階を含んでいる。
a)前述したような運動機能検査用システムを利用可能にし、
b)前記被験者の胴の傾斜の検出に適切な検査手段2に対して被験者を適用し、
c)前記手段2と恐らく少なくとも1つの圧力センサ14と恐らく光検出器4とによってその被験者の予め設定された動作を検出し、
d)段階c)で行われた前記検出に対応して信号を電子データプロセッサ5へ送信し、
e)前記被験者の歩行および/または姿勢制御を表すパラメータを得るように、前記少なくとも1つの圧力センサ14および/または前記手段2および/または前記光検出器4から発生される前記信号を集収して処理する。
【0034】
特に、段階c)は先に説明したような、センサにより読取り可能な一連の予め設定された動作を有している。前記センサはパーソナルコンピュータ5へ信号を送信することができ、そのパーソナルコンピュータ5は被験者の運動能力の評価に有効な数値パラメータを計算する方法で、それらを捕捉して処理する。
【0035】
動作は被験者のタイプおよび/または彼の運動問題にしたがって毎回設定されることができる。例えば被験者は最初に前述のストラップ22および支持バンド24により傾斜計の対2を装着して椅子1に座って位置されることができる。この位置で、傾斜計AとBはその垂直軸と整列され、その垂直軸は胴の傾斜の基準として作用する。その後、被験者はTinetti検査にしたがって以下の動作を行うことを求められる。
−動作1:被験者は膝/腿に手を載せて着席した状態を維持するように求められる;
−動作2:被験者は自然な方法で、手を使わずに着席した位置の状態から立つように求められる;
−動作3:被験者は椅子から立った後、目を開いて約20秒間、直立状態で立つことを求められる(最初の4秒間は“立ち上がった瞬間の直立”、残りは“延長した直立”と考えられる);
−動作4:被験者は約15秒間、目を閉じて直立状態を維持するように求められる;
−動作5:被験者はその場で自身を完全に360゜回転するように求められる;
−動作6:被験者は胸骨のレベルを医師が3回軽く押すのに耐えるように求められる;
−動作7:被験者は光電池対4の間を真っ直ぐ歩く動作を行うように求められる;
−動作8:被験者は再度椅子1に座るように求められ、オペレータはその間に近づく。
【0036】
段階c)は例えば前述の圧力センサ14、傾斜計2、光検出器4を含む検出手段による検査中に被験者の動作を検出することを含んでいる。この検出手段は電気信号を発生し、これはケーブルまたは前述の好ましい実施形態により無線でパーソナルコンピュータ5へ送信されることができる。
【0037】
特に、シート12上に配置された圧力センサ14は被験者の存在、またはむしろ彼らが座っているか否かを監視する役目をし、彼らが座っている場合、彼等の姿勢は相称的であるか、右または左方向に不平衡であるかを監視する。一方、肘掛13上の圧力センサ14は立ち上がるかおよび/または着席する動作中に被験者がそれらにもたれているかを確認し、もたれている場合には、両方の肘掛に等しくもたれるか否かを確かめる。
【0038】
光センサ4はそれらを分離する距離に沿って被験者の出発の瞬間と到着の瞬間を記録する。
【0039】
段階e)はコンピュータ5または他のデータプロセッサにより行われ、検査の実行中に被験者の動作を定量化できる数値パラメータの集収の自動計算を含み、特に正常または変質としてこのような動作の分類を可能にする。最後に、捕捉された信号の処理と、前記数値パラメータの計算用プログラムは既に前述したように、前述のパーソナルコンピュータ5または他のパーソナルコンピュータのRAMメモリ内にロードされる。
【0040】
好ましくは、前述の数値パラメータは本質的に(幅、期間、速度等の尺度のような)形態学的なものであり、検査を行う種々の段階で異なっている。これらはさらに、好ましくは単一の性能指数を得る目的で、セクタ内で知られている技術の使用により処理され組合されることができ、その性能指数に基づいて、適切な通常の基準値と比較するために医師が被験者の動作を参照して正常または以上の判断を行うことができる。その代わりに、それら自体が被験者の動作の評価に有効で適切であることを示す他の形態のパラメータ化および/または他の性能指数を採用することもできる。
【0041】
本発明による方法は椅子1の肘掛13に位置する圧力センサ14を具備する前述のシステムの使用を考慮している。それらにより、被験者が立上りまたは着席するために肘掛13を使用する否かを評価し、任意の静止状態の対称及びその量と、さらにタスク実行に関するその重要性を測定することができる。このような方法は、客観的なデータ点で有効に強化され、動作のさらに良好な特性に関して有用である。肘掛の存在と、それらを利用する可能性はさらに患者の平静さの程度と安全性を増加し、倒れる危険性を無くすことに役立つ。
【0042】
その代わりに、またはそれと組合わせて、本発明の方法はまた被験者が受けなければならないルートに沿って配置された前述の光検出器4の使用を含んでいる。前記光検出器4の性質は、前記検出器間のルートに沿った被験者の出発及び到着の瞬間に関する付加的なデータ点の供給と、更に正確に道程時間の測定を行うことを可能にし、それは良好または悪い歩行に基づいている。結果として、倒れる可能性の付加的な指示が観察され、考慮される。
【0043】
さらに、代わりにまたは組合わせて、前述の方法は先に説明したように無線データ送信システムを考慮してもよい。このようなシステムはTinetti検査を行わなければならない被験者に対して動作の十分な自由度を可能にし、最も自然な検査条件、即ちケーブル伝送では同様には保証されないことを可能にするので、極めて有効であることは明白である。後者の条件下では、特に被験者が自身を中心に回転する動作5を行わなければならないとき、彼等はケーブルを握るオペレータにより補助されなければならず、そうでなければ被験者自身がケーブルがもつれないように手でケーブルを持ちながら頭上に腕を上げざるを得なくなり、このようにして彼等の動作を変化させ、結果的に検査結果をゆがませる。さらに、無線送信によって、段階8の期間中にオペレータは患者の椅子の近くにいるときケーブルが邪魔になることがない。
【0044】
電子データプロセッサ5に取付けられているボタンの性質は、患者に対してさらに緊密に追従し、各段の開始および終了を更に容易に正確にマークするために、オペレータがあえて前記データプロセッサへ戻らずに、運動機能検査システムの1つの機能装置から別の装置へ移動することを可能にする。
【0045】
これまで前述した説明から、運動機能検査システムおよび、前述したような運動機能検査のパラメータの検出、集収、処理の方法の両者が現状のTinetti検査の主観的特性を除去できないとしても、最小に減少することにより完全に客観的な評価を行うことを可能にすることが明白である。
【0046】
更に、疑いなく検査結果の客観性と、検査を受ける被験者が落下する危険性の評価を改良する検出パラメータが導入される。
【0047】
最後に、検査の実行条件は既知の技術のシステムでは可能ではなかったような最適な結果のために著しく改良されている。
【図面の簡単な説明】
【0048】
【図1】本発明のシステムの機能ブロック図。
【図2】限定ではなく説明の有効な例として、被験者の胸部に適用される図1のシステムの1対の傾斜計の概略図。
【技術分野】
【0001】
本発明は運動機能検査システムと、信号の捕捉及び集収方法とそれらの信号を運動機能検査の対応するパラメータへ処理する方法に関する。特に前記システム及び方法はTinetti検査により規定されるバランスの評価中の被験者の動作の定量化に関する。
【背景技術】
【0002】
Tinetti検査は年配者または障害者の姿勢の制御と運動能力の評価に広く使用されている。この検査は日常生活からの一連の簡単な動作に基づいており、規定された順序で被験者が行わなければならない。被験者の動作は医師または理学療法専門医が予め規定された基準スケールにしたがって数値のスコアで判断を下すことによって評価される。
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述の説明から、Tinetti検査の結果は、正に検査官の評価基準に従うので非常に主観的である。それ故、検査が歪められているか、または前記主観的特性によって変更される可能性があることが明白である。客観的な検査だけが均等な評価基準と、さらに異なる評価、即ち同じ患者について異なるスタッフが行う評価と、異なる患者について同じスタッフが行う評価との両評価を比較する可能性を確実にできる。
【0004】
それ故、本発明の中心的な問題は、客観的評価の実現を可能にする運動機能検査システムを提供することである。
【0005】
それ故、本発明の第1の主題はTinetti検査中に被験者の動作および/または彼等の姿勢制御に相関する生物医学的パラメータおよび/または機能の測定を利用する運動機能検査システムを提供することである。
【0006】
本発明の第2の主題は、信号の捕捉及び集収方法と、前記運動機能検査システムにより与えられるような運動機能検査の対応するパラメータへそれらの信号を処理する方法を提供することである。
【課題を解決するための手段】
【0007】
このような問題は特許請求の範囲によりカバーされる運動機能検査システムにより解決される。
【0008】
前述のシステム及び方法の更なる特徴と利点は、添付図面を参照して、限定ではない例示で与えられている本発明の1実施形態についての以下の説明から明白になるであろう。
【発明を実施するための最良の形態】
【0009】
図1に概略して表示されている運動機能検査システムは、相互に動作可能に接続されている種々の機能ユニットを具備している。特に前記システムは運動機能検査用の椅子1と、前記運動機能検査を受ける人の胴の傾斜の検出に適している手段2と、関連する電源を有するボタン3(マーカー)と、少なくとも1つの光検出器対4と、電子データプロセッサ5と、インターフェース6とを具備している。図1では、アナログおよび/またはデジタル信号線Lと電力ケーブルCも示されている。
【0010】
椅子1は肘掛を有するタイプであり、背もたれ11(随意選択的)と、シート12と、2つの肘掛13とを備えている。背もたれ11とシート12は実質的に剛性である。さらにシート12と肘掛13にはフレキシブルな支持体上で、それぞれ少なくとも1つの薄い通常のタイプの圧力センサ14を取付けられている。薄いカバーが前記少なくとも1つの圧力センサ14を覆って保護し、同時にシート1をより快適にするように設けられてもよい。各圧力センサ14は検査を受ける被験者が加える圧力と相関された電気信号を発生するように構成されている。好ましくは、前記圧力センサ14は2つのフレキシブルなポリマーシート間に位置する感知膜から作られた薄い抵抗センサによって表される。通常、次の公称上の特性、即ち500kPaのフルスケール、2500kPaの最大の適用可能な圧力、20msよりも小さい応答時間、シート及び肘掛の寸法に適合するような感知領域及び形状が適切であると考えられる。
【0011】
特に、例示的な実施形態では、シート12上において、前記少なくとも1つのセンサは2×2のマトリックスで配置されているインターリンク・エレクトロニクス・ヨーロッパ FSR154タイプの4個の方形センサにより示され、各肘掛13では、インターリンク・エレクトロニクス・ヨーロッパ FSR648ASタイプの細長い形の長方形センサが存在し、その長い側面は肘掛自体の軸と整列している。前記センサ14は次の公称特性を有している。
−測定範囲:69Paから689kPa;
−最大圧力:約3400kPa;
−応答時間:約2ms;
−典型的なロードフリー抵抗:0.4MΩ/cm2、これはロードの増加と共に漸進的に減少する。;
−感知領域:約14cm2
【0012】
この例示的な実施形態では、さらに前記センサ14はケーブルおよび相対的なコネクタを介して電子データプロセッサ5へ接続され、これらのケーブルおよびコネクタは全体的に通常のものであるので図示しないがセンサにより発生される信号の伝送とセンサ自体の電力の供給に適している。さらにケーブルコネクタはキャパシタと共にシート12の下に位置されることが有効であり、キャパシタ自体も通常のものであるので図示しないが、センサのDC電源の電圧を濾波する役目を有している。さらに、1以上の集積回路が存在し、適切なローパスエイリアス除去フィルタを生成するのに十分な機能増幅器の総数(前記例示的な実施形態では4)に対して、その後続の圧力信号のアナログデジタル変換を考慮する。さらに、センサ14の電源は例えばシート12および/または肘掛13の下に位置するバッテリにより実現されることができる。
【0013】
人の胴の傾斜の検出に適切な手段2は胴に適合されるような傾斜計の対2または恐らく単軸或いは双軸の加速度計を具備していることが好ましい。
【0014】
前記傾斜計の対2は前−後平面の胴の傾斜を測定するように指定された第1の傾斜計Aと、中間の横方向平面の胴の傾斜を測定するように指定された第2の傾斜計Bにより表されている。通常、傾斜計の対は少なくとも±25゜のフルスケールであるべきである。加速度計が使用される場合、手順は類似している。
【0015】
好ましくは、前記1対の傾斜計は、以下の公称特性を有する図2に示されているタイプのミドリプレジションPMP−S30TXタイプの2つの機械−電気傾斜計により表される。
−供給電圧(V0):直流4.5乃至8V;
−フルスケール:±30゜;
−対応する出力電圧範囲:2.5V(オフセット)±1.1V、供給電圧V0=8V;
−線形性:±1%FS;
−(ヒステリシスを含む)感度:0.03゜よりも良好;
−出力感度:0.00225V0±2%V/゜(20ボルトのV0)
−応答時間:約0.2s;
−寸法:直径=20mm、高さ=40mm;
−重量:35グラム;
−200CSのシリコンオイルでバッファリング
【0016】
傾斜計の対2のフルスケールが±45゜よりも小さい場合、傾斜計の対2が例えば図2で概略的に表されているようにポリカーボネートの支持体のような適当な支持体15上に設けられることを助言する。通常、支持体15は傾斜計AおよびBの最大の感度の対応する平面が相互に垂直であるように構成されなければならない。傾斜計AとBの対が個人の胸部に固定されるとき、以下よく説明するように、前述の2つの平面は前記個人の中間平面および前部平面に実質的に平行でなければならない。傾斜計が患者の胸部に適用され、彼らが普通の直立した姿勢を取るとき、問題の支持体は重力の方向にしたがって各傾斜計の最大感度の平面の方向付けを可能にしなければならない。このような整列は検査(以下を参照)の開始前に各被験者について実行され、センサの力学の最良の使用を可能にする目的と、胴の更に広い傾斜を必要とする動作を実行する期間中に、測定の飽和の危険性を制限する目的とを有する。この要求は測定範囲が十分に広く、既に説明したように±45゜を超えるならば生じることは無い。
【0017】
この理由で、支持体15は既に繰返し説明した例示的な実施形態のように2つの平行なプレート、即ち内側プレート16と外側プレート17とにより構成され、2つの平行なプレートはそれらの平面に垂直な軸を中心に相互に関して回転するように接続されている。内側プレート16は支持体が被験者に取付けられるとき前記被験者の身体に接触して配置され、一方、プレート17は前記身体に関して外側である。
【0018】
特に、内側プレート16および外側プレート17は前記例示的な実施形態では、実質的に長方形であり、図2で示されているように、前記接続は前記プレート16と17の一方の側面の近くで行われる。接続手段は内側プレート16に固定されているピボット18と、外側プレート17に形成された円形アーチ形状で延在する細いウィンドウ19とを具備している。ウィンドウ19は内側プレート16を覆って外側プレート17の回転を可能にするように前記ピボット18と結合している。この回転は、一度被験者が以下の点に関して、装置(弾性を有するストラップ22と支持バンド24)を使用して傾斜計AとBを装着すると、重力の方向に関して傾斜計Bの最大の感度の平面が整列するのを可能にする。傾斜計Aの最大の感度の対応する平面の整列は、傾斜計Aの軸に垂直な軸20を中心として傾斜計自体が自由に振動する状態にし、その後このようにして想定される位置にこの傾斜計Aをロック螺子21を使用して固定することにより行われる。
【0019】
内側プレート16はその後、その両側に形成された2つのボタンホール23を使用して、弾性を有するストラップ22上に移動可能に取付けられる。さらに、前記内側プレート16はまた2つの対応するボタンホール25を通して2つの支持バンド24により結合される。ストラップ22と支持バンド24の役目は後述するように、人の胴のレベルに1対の傾斜計2を装着することを可能にすることである。
【0020】
外側プレート17は傾斜計AとBの実際の支持体を構成している。図2に示されているように、内側プレート16に関して反対方向で回転するその表面上には、前述したように前述した軸20および関連する保持螺子21を通して傾斜計Aが取り付けられ、また前記外側プレート17に強固に固定されている傾斜計Bと、DC供給電圧の濾波のためのキャパシタ(図示せず)と、出力バッファとしておよび後続する傾斜計からの信号のアナログデジタル変換を考慮したエイリアス除去フィルタとして使用される適切な数(前記例示的な実施形態では4つ)の演算増幅器を含んでいる1以上の集積回路(図示しないがIC)とが取り付けられている。
【0021】
好ましくは、適切な電圧及び充電状態のバッテリ26もまた、傾斜計の潜在的な独立したエネルギ源として外側プレート17に設けられることができ、それには供給のために必要な回路およびスイッチ(図示せず)を備え、それによってエネルギ源と、前述のバッテリと、または電子データプロセッサ5からまたはその他の電源から得られる外部電源として選択されることができる。
【0022】
ボタン3は全体的に一般的な手動またはペダル動作であり、データプロセッサ5または独立したバッテリ(例えばタイプAAペンライト)から低電圧電力が供給されることができる。これは運動機能検査を行う物理療法医または理学療法専門医により操作され、運動機能検査の種々の段階の開始および恐らく終了を示すマーカーとして使用されることができる。ボタン3は、押されるとき、定電圧信号を発生し、これはシステムの他のコンポーネントにより発生される信号と共に電子データプロセッサ5により捕捉される。
【0023】
ボタン3は電子データプロセッサ5自体からの例えばキーボードまたはマウスのコマンドのような検査の各段階の開始及び終了のマークを可能にする任意のその他の手段により置換されることができることに注意すべきである。結果として、検査の種々の段階は電子データプロセッサ5により得られる信号の正確な解釈と解析とを目的として、曖昧さがなく相互に弁別されることができる。
【0024】
1つの好ましい実施形態によれば、運動機能検査システムは先の実施形態の代わりにまたはそれに加えて、被験者が受けなければならない検査ルートに沿って配置されている少なくとも1対の光検出器4を具備することができる。特に、前記光検出器は光路に反射器が挿入されるか挿入されずに光エミッタと光受信機の組合せにより表されるか、または被験者の通過を検出することのできるその他の通常の装置によって表される。前記検出器はそれぞれ出発時間及び到着時間を記録する方法で、ルートの開始及び終了点に位置されることが好ましい。
【0025】
電子データプロセッサ5は例えば全体的に通常のデスクトップ(PC)または(中央処理装置CPUおよび関連するRAMおよびROMメモリを含む)ポータブルパーソナルコンピュータにより構成され、同様に通常の周辺機器(HDD、FDD、CD−ROMドライブ、可能なCD−ROMライター、グラフィックプリンタ)とユーザインターフェース(特にキーボード及びマウスまたは等価装置)が設けられる。
【0026】
パーソナルコンピュータ5にはデータ捕捉モジュール(図示せず)が設けられ、全ての関連する信号を捕捉するのに十分な数で、少なくとも12ビットのA/D入力ポートが設けられているアナログデジタル変換カードを具備している。本発明の例示された実施形態にしたがって少なくとも後続する信号、即ち2つの各傾斜計の信号と、恐らく光検出器4の各2つの対のそれぞれの信号と、ボタン3の信号と、実際に使用される圧力センサ14の数に等しい複数の付加的な信号とが関連する。好ましくは、同一のデータ捕捉モジュールには恐らく電力を傾斜計2、(独立して供給されないならば)ボタン3、圧力センサ14へ供給するために使用されるデジタル出力ポートが設けられ、一方、光検出器4は通常、バッテリまたは主電源から独立した電源を必要とする。同様に、同一のデータ捕捉モジュールには例えばシステム全体の良好な動作に適切な、または必要と見られるその他の可能なコマンドに対して使用されるTTLタイプのデジタル入力ポートが設けられる。前記入力及び出力ポートはセクタで広く知られている装置であるので図に示されていない。このデータ捕捉モジュールは、そのアナログデジタル変換機能のおかげで、特に圧力センサ14、傾斜計AおよびB、ボタン3、光検出器4から発生する信号のサンプリングを可能にする。このようなサンプルリングされた信号は例えば傾斜計AおよびBの場合には、Tinetti検査にしたがって被験者が行う動作期間中の関連する胴の傾斜測定の結果を表す。60進法その他の度数の角測定単位で適切に表されるそれらの値のシーケンスは、前記検査期間中に、中間および前部平面において垂直軸に関する胴の傾斜角度の時間にわたる変化を表している。同様に、圧力センサ14により発生される電気信号は時間の関数としてシート12と肘掛13上で被験者が与える圧力値を測定する。ボタン3により発生される信号は運動機能検査の各異なる段階のそれぞれの開始及び終了の正確な瞬間を示すインパルスにより表される。同様に、光検出器4により放出される信号は構想されたルートの開始および終了地点或いは光センサが恐らく配置される他の地点で、被験者が検出器自体の検出線を横切る正確な瞬間に発生されるインパルスによって表される。全ての前述の採取された信号は、被験者および必要であると考えられる検査の識別データと共に、パーソナルコンピュータ5自体または別のコンピュータでセットアップされるデータベース中に有効に組織化されるか、他のコンピュータ媒体に記憶されるか、関連性があるか適切であると考えられる他の形態に有効に組織化される。
【0027】
先の地点に関して採取された信号は、検査の実行中に被験者の動作を客観的に特徴付けするために適切な数値のパラメータを得る目的で、後に示す規準及び方法にしたがって処理される。このようにして得られた全てのパラメータはその後、予め設定された基準パラメータと比較される。この比較によって、医師はTinetti検査から得られるように、患者の姿勢制御及びバランスの正確で完全に客観的な評価に対して有効な客観情報を得るであろう。
【0028】
前述したように捕捉されたサンプル信号の処理および前記数値パラメータの計算用のプログラムは前述のパーソナルコンピュータ5または別のパーソナルコンピュータのRAMメモリ内にロードされる。同じプログラムはフロッピー(登録商標)ディスク、CD−ROMまたは例えば電気通信ネットワークによる送信を行う方法のようなセクタ内で知られているその他の方法によって、前述のパーソナルコンピュータ5または他のパーソナルコンピュータに対して利用可能にされる。
【0029】
パーソナルコンピュータ5または他のパーソナルコンピュータの中央処理装置は前記サンプル信号を処理するプログラムの命令を実行するような装置である。
【0030】
さらに、前記システムは圧力信号の捕捉と、例えばデジタル出力ポートを通して制御されるBJTスイッチによる他のセンサからの信号の捕捉をエネーブル/ディスエーブルするために使用されるインターフェース6を具備することができる。好ましくは、このインターフェース6はパーソナルコンピュータに関して外部に位置される。その代わりに、捕捉される信号のソフトウェアを介しての選択にしたがうことができる。
【0031】
付加的な異なる実施形態によれば、本発明の運動機能検査システムは先の実施形態の代わりにまたはそれに加えて、傾斜計センサ2により発生されてパーソナルコンピュータ5へ送られる信号の送信が、検査の実行中の被験者の動作の完全な自由を確実にし、接続ケーブルにより生じる任意の可能な障害を防止する目的で、無線技術によって行われることも考えられる。この場合、傾斜計AとBは、例えば単一チャンネル或いは2チャンネル(図示せず)の送信モジュールに接続され、傾斜計センサ2自体により発生される信号の処理(恐らくサンプリングおよびA/D変換、恐らく操作、変調、増幅及びその他)を実行し、それによってこれらが自由空間を介する放射に対して適するようにし、適切なアンテナにより利用される。結果として、捕捉モジュールには付加的なアンテナと受信機モジュール(図示せず)が設けられ、それによって受信される放射された信号の必要な処理(復調、デマルチプレクス、その他)を実行する。例えばセクタ内で知られているタイプの無線周波数システムを使用することが可能である。1つの特定のシステムは例えば前記信号および市場で入手可能なコンポーネントの送信に適切な特性を有するブルートュース(登録商標)1.1国際標準にしたがって、1実施形態により表されることができる。
【0032】
前述の無線技術は圧力センサ14と光検出器4に対しても適用されることに注意すべきである。
【0033】
本発明の第2の目的は運動機能検査のパラメータの検出、集収、処理方法を提供することであり、この方法は一連の以下の段階を含んでいる。
a)前述したような運動機能検査用システムを利用可能にし、
b)前記被験者の胴の傾斜の検出に適切な検査手段2に対して被験者を適用し、
c)前記手段2と恐らく少なくとも1つの圧力センサ14と恐らく光検出器4とによってその被験者の予め設定された動作を検出し、
d)段階c)で行われた前記検出に対応して信号を電子データプロセッサ5へ送信し、
e)前記被験者の歩行および/または姿勢制御を表すパラメータを得るように、前記少なくとも1つの圧力センサ14および/または前記手段2および/または前記光検出器4から発生される前記信号を集収して処理する。
【0034】
特に、段階c)は先に説明したような、センサにより読取り可能な一連の予め設定された動作を有している。前記センサはパーソナルコンピュータ5へ信号を送信することができ、そのパーソナルコンピュータ5は被験者の運動能力の評価に有効な数値パラメータを計算する方法で、それらを捕捉して処理する。
【0035】
動作は被験者のタイプおよび/または彼の運動問題にしたがって毎回設定されることができる。例えば被験者は最初に前述のストラップ22および支持バンド24により傾斜計の対2を装着して椅子1に座って位置されることができる。この位置で、傾斜計AとBはその垂直軸と整列され、その垂直軸は胴の傾斜の基準として作用する。その後、被験者はTinetti検査にしたがって以下の動作を行うことを求められる。
−動作1:被験者は膝/腿に手を載せて着席した状態を維持するように求められる;
−動作2:被験者は自然な方法で、手を使わずに着席した位置の状態から立つように求められる;
−動作3:被験者は椅子から立った後、目を開いて約20秒間、直立状態で立つことを求められる(最初の4秒間は“立ち上がった瞬間の直立”、残りは“延長した直立”と考えられる);
−動作4:被験者は約15秒間、目を閉じて直立状態を維持するように求められる;
−動作5:被験者はその場で自身を完全に360゜回転するように求められる;
−動作6:被験者は胸骨のレベルを医師が3回軽く押すのに耐えるように求められる;
−動作7:被験者は光電池対4の間を真っ直ぐ歩く動作を行うように求められる;
−動作8:被験者は再度椅子1に座るように求められ、オペレータはその間に近づく。
【0036】
段階c)は例えば前述の圧力センサ14、傾斜計2、光検出器4を含む検出手段による検査中に被験者の動作を検出することを含んでいる。この検出手段は電気信号を発生し、これはケーブルまたは前述の好ましい実施形態により無線でパーソナルコンピュータ5へ送信されることができる。
【0037】
特に、シート12上に配置された圧力センサ14は被験者の存在、またはむしろ彼らが座っているか否かを監視する役目をし、彼らが座っている場合、彼等の姿勢は相称的であるか、右または左方向に不平衡であるかを監視する。一方、肘掛13上の圧力センサ14は立ち上がるかおよび/または着席する動作中に被験者がそれらにもたれているかを確認し、もたれている場合には、両方の肘掛に等しくもたれるか否かを確かめる。
【0038】
光センサ4はそれらを分離する距離に沿って被験者の出発の瞬間と到着の瞬間を記録する。
【0039】
段階e)はコンピュータ5または他のデータプロセッサにより行われ、検査の実行中に被験者の動作を定量化できる数値パラメータの集収の自動計算を含み、特に正常または変質としてこのような動作の分類を可能にする。最後に、捕捉された信号の処理と、前記数値パラメータの計算用プログラムは既に前述したように、前述のパーソナルコンピュータ5または他のパーソナルコンピュータのRAMメモリ内にロードされる。
【0040】
好ましくは、前述の数値パラメータは本質的に(幅、期間、速度等の尺度のような)形態学的なものであり、検査を行う種々の段階で異なっている。これらはさらに、好ましくは単一の性能指数を得る目的で、セクタ内で知られている技術の使用により処理され組合されることができ、その性能指数に基づいて、適切な通常の基準値と比較するために医師が被験者の動作を参照して正常または以上の判断を行うことができる。その代わりに、それら自体が被験者の動作の評価に有効で適切であることを示す他の形態のパラメータ化および/または他の性能指数を採用することもできる。
【0041】
本発明による方法は椅子1の肘掛13に位置する圧力センサ14を具備する前述のシステムの使用を考慮している。それらにより、被験者が立上りまたは着席するために肘掛13を使用する否かを評価し、任意の静止状態の対称及びその量と、さらにタスク実行に関するその重要性を測定することができる。このような方法は、客観的なデータ点で有効に強化され、動作のさらに良好な特性に関して有用である。肘掛の存在と、それらを利用する可能性はさらに患者の平静さの程度と安全性を増加し、倒れる危険性を無くすことに役立つ。
【0042】
その代わりに、またはそれと組合わせて、本発明の方法はまた被験者が受けなければならないルートに沿って配置された前述の光検出器4の使用を含んでいる。前記光検出器4の性質は、前記検出器間のルートに沿った被験者の出発及び到着の瞬間に関する付加的なデータ点の供給と、更に正確に道程時間の測定を行うことを可能にし、それは良好または悪い歩行に基づいている。結果として、倒れる可能性の付加的な指示が観察され、考慮される。
【0043】
さらに、代わりにまたは組合わせて、前述の方法は先に説明したように無線データ送信システムを考慮してもよい。このようなシステムはTinetti検査を行わなければならない被験者に対して動作の十分な自由度を可能にし、最も自然な検査条件、即ちケーブル伝送では同様には保証されないことを可能にするので、極めて有効であることは明白である。後者の条件下では、特に被験者が自身を中心に回転する動作5を行わなければならないとき、彼等はケーブルを握るオペレータにより補助されなければならず、そうでなければ被験者自身がケーブルがもつれないように手でケーブルを持ちながら頭上に腕を上げざるを得なくなり、このようにして彼等の動作を変化させ、結果的に検査結果をゆがませる。さらに、無線送信によって、段階8の期間中にオペレータは患者の椅子の近くにいるときケーブルが邪魔になることがない。
【0044】
電子データプロセッサ5に取付けられているボタンの性質は、患者に対してさらに緊密に追従し、各段の開始および終了を更に容易に正確にマークするために、オペレータがあえて前記データプロセッサへ戻らずに、運動機能検査システムの1つの機能装置から別の装置へ移動することを可能にする。
【0045】
これまで前述した説明から、運動機能検査システムおよび、前述したような運動機能検査のパラメータの検出、集収、処理の方法の両者が現状のTinetti検査の主観的特性を除去できないとしても、最小に減少することにより完全に客観的な評価を行うことを可能にすることが明白である。
【0046】
更に、疑いなく検査結果の客観性と、検査を受ける被験者が落下する危険性の評価を改良する検出パラメータが導入される。
【0047】
最後に、検査の実行条件は既知の技術のシステムでは可能ではなかったような最適な結果のために著しく改良されている。
【図面の簡単な説明】
【0048】
【図1】本発明のシステムの機能ブロック図。
【図2】限定ではなく説明の有効な例として、被験者の胸部に適用される図1のシステムの1対の傾斜計の概略図。
【特許請求の範囲】
【請求項1】
少なくとも1つの圧力センサ(14)が設けられているシート(12)と、少なくとも1つの圧力センサ(14)がそれぞれ設けられている肘掛(13)とを具備している運動機能検査用の椅子(1)と、
被験者の胴の傾斜の検出に適している手段(2)と、
刺激されるとき前記少なくとも1つの圧力センサ(14)により放出された信号と、前記手段(2)からの信号とを受信し、前記信号を集収し、対応する指示パラメータを処理する電子データプロセッサ(5)とを具備している運動機能検査システム。
【請求項2】
さらに、前記被験者が受けなければならない設定されたルートの開始及び終了地点に位置する少なくとも1対の光検出器(4)をさらに具備している請求項1記載の運動機能検査システム。
【請求項3】
前記圧力センサ(14)からの信号と、前記手段(2)からの信号と、前記光検出器の対(4)からの信号との前記データプロセッサ(5)への送信は無線技術を使用して行われる請求項1または2記載の運動機能検査システム。
【請求項4】
シート(12)上に位置する少なくとも1つの圧力センサ(14)が設けられている運動機能検査用の椅子(1)と、
被験者の胴の傾斜の検出を行う手段(2)と、
前記被験者が受けなければならない設定されたルートの開始地点及び終了地点に位置する少なくとも1対の光検出器(4)と、
刺激されるとき少なくとも1つの圧力センサ(14)と、前記手段(2)と、前記光検出器の対(4)とにより放出された信号を受信し、前記信号を集収し、対応する指示パラメータを処理する電子データプロセッサ(5)とを具備している運動機能検査システム。
【請求項5】
前記圧力センサ(14)と、前記手段(2)と、前記光検出器の対(3)と、前記電子データプロセッサ(5)とからの信号の伝送は無線技術を使用して行われる請求項4記載の運動機能検査システム。
【請求項6】
シート(12)上に位置する少なくとも1つの圧力センサ(14)が設けられている運動機能検査用の椅子(1)と、
被験者の胴の傾斜の検出を行う手段(2)と、
刺激されるとき前記少なくとも1つの圧力センサ(14)と、前記手段(2)とから放出された信号を受信し、前記信号を集収し、対応する指示パラメータを処理する電子データプロセッサ(5)とを具備し、
前記電子データプロセッサ(5)への信号の伝送は無線技術を使用して行われる運動機能検査システム。
【請求項7】
さらに、前記電子データプロセッサ(5)への前記信号の捕捉をエネーブルまたはディスエーブルするためのインターフェース(6)を具備している請求項1乃至6のいずれか1項記載の運動機能検査システム。
【請求項8】
前記少なくとも1つの圧力センサ(14)はフレキシブルな支持体に取付けられている請求項1乃至7のいずれか1項記載の運動機能検査システム。
【請求項9】
前記少なくとも1つの圧力センサ(14)は2つのフレキシブルなポリマーシート間に位置する感知膜から作られた薄い抵抗センサであり、好ましくは前記少なくとも1つの圧力センサはシート(12)上のインターリンク・エレクトロニクス ヨーロッパ FSR154タイプであり、肘掛(13)上の圧力センサはインターリンク・エレクトロニクス ヨーロッパ FSR648ASタイプである請求項8記載の運動機能検査システム。
【請求項10】
前記手段(2)は1対の傾斜計(A、B)を具備している被験者の胴の傾斜の検出するように構成されている請求項1乃至9のいずれか1項記載の運動機能検査システム。
【請求項11】
前記1対の傾斜計(A、B)は、前−後平面における被験者の胴の傾斜を測定するように指定された第1の傾斜計(A)と、中間平面の被験者の胴の傾斜を測定するように指定された第2の傾斜計(B)とにより構成されている請求項10記載の運動機能検査システム。
【請求項12】
前記1対の傾斜計(A、B)(2)は、ミドリプレジションPMP−S30TXタイプである請求項10または11記載の運動機能検査システム。
【請求項13】
前記1対の傾斜計(A、B)(2)は支持体(15)に取付けられ、前記支持体(15)は前記傾斜計(A、B)の最大の感度の各平面の方位が相互に垂直であることを可能にするように構成されている請求項10乃至12のいずれか1項記載の運動機能検査システム。
【請求項14】
前記支持体(15)は内側プレート(16)と外側プレート(17)の2つの平行なプレートを具備し、それらはそれらの平面に垂直な軸を中心に相互に関して回転するように相互に接続されている請求項13記載の運動機能検査システム。
【請求項15】
前記内側プレート(16)はボタンホール(23)を介して弾性を有するストラップ(22)に移動可能に取付けられ、2つの対応するボタンホール(25)を介して2つの支持バンド(24)と結合され、それによって被験者が前記1対の傾斜計(2)を装着することを可能にしている請求項14記載の運動機能検査システム。
【請求項16】
前記少なくとも1対の光検出器(4)は2つの光電池対または2つの光電池反射器の対またはそれらを通して被験者の通過を検出するように構成された類似の装置によって構成されている請求項2、3、5および7乃至15のいずれか1項記載の運動機能検査システム。
【請求項17】
前記インターフェース(6)は前記圧力センサ(14)および/または1対の傾斜計(2)および/または光検出器の対(4)から発生される電気信号の捕捉をエネーブルまたはディスエーブルする請求項1乃至16のいずれか1項記載の運動機能検査システム。
【請求項18】
電気信号の前記伝送は無線周波数システムを使用し、特にブルートュース1.1国際標準にしたがって実行される請求項3および請求項5乃至17のいずれか1項記載の運動機能検査システム。
【請求項19】
さらに、前記電子データプロセッサ(5)に接続されているボタン(3)を具備し、それによって運動機能検査を構成する種々の段階の開始点及び恐らく終了点を示す請求項1乃至18のいずれか1項記載の運動機能検査システム。
【請求項20】
信号の捕捉及び集収と、それらを運動機能検査のための対応するパラメータに処理する方法において、一連の以下の段階、即ち、
a)請求項1乃至10のいずれか1項にしたがって運動機能検査システムを提供し、
b)検査される被験者に前記被験者の胴の傾斜検出を行う手段(2)を適用し、
c)前記手段(2)と恐らく少なくとも1つの圧力センサ(14)と恐らく光検出器(4)とによって被験者の予め設定された動作を検出し、
d)段階c)で実現された前記検出に対応して信号を電子データプロセッサ(5)へ送信し、
e)前記被験者の歩行および/または姿勢の程度を表すパラメータを得るように、前記少なくとも1つの圧力センサ(14)および/または前記手段(2)および/または前記光検出器(4)から発生する前記信号を集収して処理する段階を含んでいる方法。
【請求項21】
前記検出段階c)は圧力および/または傾斜の変化を検出し、および/または前記圧力センサ(14)と、前記手段(2)と、前記少なくとも1つの対の光センサ(4)との間をそれぞれ通過することを検出することにより行われる請求項20記載の方法。
【請求項22】
前記送信段階はケーブルまたは無線技術を使用して行われる請求項20または21記載の方法。
【請求項23】
前記圧力センサ(14)および/または前記手段(2)および/または少なくとも1対の光センサ(4)から発生する信号を前記電子データプロセッサ(5)により集収して処理する前記段階は、信号のデジタルデータへの変換を含んでおり、そのデジタルデータから前記パラメータが得られる請求項20、21または22のいずれか1項記載の方法。
【請求項24】
前記パラメータは数値の形態学的パラメータであり、これはさらに単一の性能指数を得る目的で処理されて組合わされる請求項20記載の方法。
【請求項1】
少なくとも1つの圧力センサ(14)が設けられているシート(12)と、少なくとも1つの圧力センサ(14)がそれぞれ設けられている肘掛(13)とを具備している運動機能検査用の椅子(1)と、
被験者の胴の傾斜の検出に適している手段(2)と、
刺激されるとき前記少なくとも1つの圧力センサ(14)により放出された信号と、前記手段(2)からの信号とを受信し、前記信号を集収し、対応する指示パラメータを処理する電子データプロセッサ(5)とを具備している運動機能検査システム。
【請求項2】
さらに、前記被験者が受けなければならない設定されたルートの開始及び終了地点に位置する少なくとも1対の光検出器(4)をさらに具備している請求項1記載の運動機能検査システム。
【請求項3】
前記圧力センサ(14)からの信号と、前記手段(2)からの信号と、前記光検出器の対(4)からの信号との前記データプロセッサ(5)への送信は無線技術を使用して行われる請求項1または2記載の運動機能検査システム。
【請求項4】
シート(12)上に位置する少なくとも1つの圧力センサ(14)が設けられている運動機能検査用の椅子(1)と、
被験者の胴の傾斜の検出を行う手段(2)と、
前記被験者が受けなければならない設定されたルートの開始地点及び終了地点に位置する少なくとも1対の光検出器(4)と、
刺激されるとき少なくとも1つの圧力センサ(14)と、前記手段(2)と、前記光検出器の対(4)とにより放出された信号を受信し、前記信号を集収し、対応する指示パラメータを処理する電子データプロセッサ(5)とを具備している運動機能検査システム。
【請求項5】
前記圧力センサ(14)と、前記手段(2)と、前記光検出器の対(3)と、前記電子データプロセッサ(5)とからの信号の伝送は無線技術を使用して行われる請求項4記載の運動機能検査システム。
【請求項6】
シート(12)上に位置する少なくとも1つの圧力センサ(14)が設けられている運動機能検査用の椅子(1)と、
被験者の胴の傾斜の検出を行う手段(2)と、
刺激されるとき前記少なくとも1つの圧力センサ(14)と、前記手段(2)とから放出された信号を受信し、前記信号を集収し、対応する指示パラメータを処理する電子データプロセッサ(5)とを具備し、
前記電子データプロセッサ(5)への信号の伝送は無線技術を使用して行われる運動機能検査システム。
【請求項7】
さらに、前記電子データプロセッサ(5)への前記信号の捕捉をエネーブルまたはディスエーブルするためのインターフェース(6)を具備している請求項1乃至6のいずれか1項記載の運動機能検査システム。
【請求項8】
前記少なくとも1つの圧力センサ(14)はフレキシブルな支持体に取付けられている請求項1乃至7のいずれか1項記載の運動機能検査システム。
【請求項9】
前記少なくとも1つの圧力センサ(14)は2つのフレキシブルなポリマーシート間に位置する感知膜から作られた薄い抵抗センサであり、好ましくは前記少なくとも1つの圧力センサはシート(12)上のインターリンク・エレクトロニクス ヨーロッパ FSR154タイプであり、肘掛(13)上の圧力センサはインターリンク・エレクトロニクス ヨーロッパ FSR648ASタイプである請求項8記載の運動機能検査システム。
【請求項10】
前記手段(2)は1対の傾斜計(A、B)を具備している被験者の胴の傾斜の検出するように構成されている請求項1乃至9のいずれか1項記載の運動機能検査システム。
【請求項11】
前記1対の傾斜計(A、B)は、前−後平面における被験者の胴の傾斜を測定するように指定された第1の傾斜計(A)と、中間平面の被験者の胴の傾斜を測定するように指定された第2の傾斜計(B)とにより構成されている請求項10記載の運動機能検査システム。
【請求項12】
前記1対の傾斜計(A、B)(2)は、ミドリプレジションPMP−S30TXタイプである請求項10または11記載の運動機能検査システム。
【請求項13】
前記1対の傾斜計(A、B)(2)は支持体(15)に取付けられ、前記支持体(15)は前記傾斜計(A、B)の最大の感度の各平面の方位が相互に垂直であることを可能にするように構成されている請求項10乃至12のいずれか1項記載の運動機能検査システム。
【請求項14】
前記支持体(15)は内側プレート(16)と外側プレート(17)の2つの平行なプレートを具備し、それらはそれらの平面に垂直な軸を中心に相互に関して回転するように相互に接続されている請求項13記載の運動機能検査システム。
【請求項15】
前記内側プレート(16)はボタンホール(23)を介して弾性を有するストラップ(22)に移動可能に取付けられ、2つの対応するボタンホール(25)を介して2つの支持バンド(24)と結合され、それによって被験者が前記1対の傾斜計(2)を装着することを可能にしている請求項14記載の運動機能検査システム。
【請求項16】
前記少なくとも1対の光検出器(4)は2つの光電池対または2つの光電池反射器の対またはそれらを通して被験者の通過を検出するように構成された類似の装置によって構成されている請求項2、3、5および7乃至15のいずれか1項記載の運動機能検査システム。
【請求項17】
前記インターフェース(6)は前記圧力センサ(14)および/または1対の傾斜計(2)および/または光検出器の対(4)から発生される電気信号の捕捉をエネーブルまたはディスエーブルする請求項1乃至16のいずれか1項記載の運動機能検査システム。
【請求項18】
電気信号の前記伝送は無線周波数システムを使用し、特にブルートュース1.1国際標準にしたがって実行される請求項3および請求項5乃至17のいずれか1項記載の運動機能検査システム。
【請求項19】
さらに、前記電子データプロセッサ(5)に接続されているボタン(3)を具備し、それによって運動機能検査を構成する種々の段階の開始点及び恐らく終了点を示す請求項1乃至18のいずれか1項記載の運動機能検査システム。
【請求項20】
信号の捕捉及び集収と、それらを運動機能検査のための対応するパラメータに処理する方法において、一連の以下の段階、即ち、
a)請求項1乃至10のいずれか1項にしたがって運動機能検査システムを提供し、
b)検査される被験者に前記被験者の胴の傾斜検出を行う手段(2)を適用し、
c)前記手段(2)と恐らく少なくとも1つの圧力センサ(14)と恐らく光検出器(4)とによって被験者の予め設定された動作を検出し、
d)段階c)で実現された前記検出に対応して信号を電子データプロセッサ(5)へ送信し、
e)前記被験者の歩行および/または姿勢の程度を表すパラメータを得るように、前記少なくとも1つの圧力センサ(14)および/または前記手段(2)および/または前記光検出器(4)から発生する前記信号を集収して処理する段階を含んでいる方法。
【請求項21】
前記検出段階c)は圧力および/または傾斜の変化を検出し、および/または前記圧力センサ(14)と、前記手段(2)と、前記少なくとも1つの対の光センサ(4)との間をそれぞれ通過することを検出することにより行われる請求項20記載の方法。
【請求項22】
前記送信段階はケーブルまたは無線技術を使用して行われる請求項20または21記載の方法。
【請求項23】
前記圧力センサ(14)および/または前記手段(2)および/または少なくとも1対の光センサ(4)から発生する信号を前記電子データプロセッサ(5)により集収して処理する前記段階は、信号のデジタルデータへの変換を含んでおり、そのデジタルデータから前記パラメータが得られる請求項20、21または22のいずれか1項記載の方法。
【請求項24】
前記パラメータは数値の形態学的パラメータであり、これはさらに単一の性能指数を得る目的で処理されて組合わされる請求項20記載の方法。
【図1】


【図2】
【図2】
【公表番号】特表2007−518430(P2007−518430A)
【公表日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願番号】特願2005−509839(P2005−509839)
【出願日】平成15年10月24日(2003.10.24)
【国際出願番号】PCT/IT2003/000660
【国際公開番号】WO2005/039412
【国際公開日】平成17年5月6日(2005.5.6)
【出願人】(504312771)ヒューマニタス・ミラソーレ・エス.ピー.エー. (8)
【Fターム(参考)】
【公表日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願日】平成15年10月24日(2003.10.24)
【国際出願番号】PCT/IT2003/000660
【国際公開番号】WO2005/039412
【国際公開日】平成17年5月6日(2005.5.6)
【出願人】(504312771)ヒューマニタス・ミラソーレ・エス.ピー.エー. (8)
【Fターム(参考)】
[ Back to top ]