
運動装置
【課題】静脈血栓症の発症を防ぐことができる運動装置を提供する。
【解決手段】運動装置150は、左ホルダ152、右ホルダ153、移動制御機構を備える。移動制御機構は、基盤、メインシャフト157、アーム155、ホルダアジャスタ161、162、ベルトを備える。患者が横たわる寝台上に基盤がベルトで固定され、基盤中央部にはメインシャフト157が立設されている。メインシャフト157先端部にはストレート状のアーム155がメインシャフト157に対して略垂直をなして回転軸線P周りに回動可能に設けられ、メインシャフト157に支持されたアーム155の両サイドにホルダ152、153が配置されている。アーム155が回動軸線P周りで回動することにより、各ホルダ152、153が垂直方向Zに沿って移動し、患者の脚を動作させることができる。
【解決手段】運動装置150は、左ホルダ152、右ホルダ153、移動制御機構を備える。移動制御機構は、基盤、メインシャフト157、アーム155、ホルダアジャスタ161、162、ベルトを備える。患者が横たわる寝台上に基盤がベルトで固定され、基盤中央部にはメインシャフト157が立設されている。メインシャフト157先端部にはストレート状のアーム155がメインシャフト157に対して略垂直をなして回転軸線P周りに回動可能に設けられ、メインシャフト157に支持されたアーム155の両サイドにホルダ152、153が配置されている。アーム155が回動軸線P周りで回動することにより、各ホルダ152、153が垂直方向Zに沿って移動し、患者の脚を動作させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、下肢の運動装置に関するものであり、さらに詳しくは下肢を動作させる運動装置に関するものである。
【背景技術】
【0002】
近年、人工股関節全置換術後および人工膝関節全置換術後に、血栓の発生を低減させるための研究が進められている。例えば人工股関節全置換術後または人工膝関節全置換術後に脚を長期間静置させたままにした場合では、下肢の静脈に血栓が形成されてしまうことがあった。静脈内に血栓が形成されるとエコノミークラス症候群に代表されるように、虚血や梗塞などの危険性が高まり、重体に陥る危険性もある。そこで、血栓の形成を防止するために下肢を運動させることが考えられたが、実際には、例えば特許文献1に示されるような常時下肢を圧迫する弾性ストッキングや、特許文献2に示されるようなバルーン状のエアバッグ構造体を膨縮させて下肢を間欠的に圧迫する装置が術後の入院期間中に用いられることがほとんどであり、この弾性ストッキングや圧迫装置を用いることにより、血栓の形成割合を低減している。
【0003】
しかしながら、血栓の形成に関してより高い抑制効果を期待する場合には、下肢を実際に動かす必要があり、可能であれば患者が自力(自動ともいう)で下肢を動かすことが好ましいと考えられているが、弾性ストッキングや圧迫装置を用いた運動では下肢を自力で動作させることがなく、このため、血栓形成の抑制に関してはある程度の効果しか期待することができなかった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−076250号公報
【特許文献2】国際公開第2008/044400号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記の事情に鑑みてなされたものであり、患者が自力で下肢を動かすことにより静脈血栓のリスクを減じることができるという考察に基づき、患者が自力で下肢の動作が可能な装置を提供して下肢の外科手術後における静脈血栓症の発症を防ぐことを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の運動装置は、
患者の足を保持するホルダと、
前記ホルダを移動可能に保持する移動制御機構とを備えることを特徴とする。
このとき、前記移動制御機構は、
一方の足側から他方の足側へ向かう左右方向成分と、
爪先側および踵側の一方から他方に向かう前後方向成分と、
前記左右方向成分と前記前後方向成分とに略垂直な垂直方向成分と、
のうちの少なくともいずれか1つの方向成分を有する方向に前記ホルダを移動可能に保持してもよい。
また、前記移動制御機構が、左ホルダの移動および右ホルダの移動を同調させることが好ましい。同調時の足の移動態様としては、両足を必ずしも同じ方向へ移動させる必要はなく、一方が前方へ動くときに他方が後方へ動く、一方が左側へ動くときに他方が右側へ動くなど、それぞれの足が異なる方向へ動くようにしてもよい。
また、前記ホルダは、足底弓に嵌合する丘状部を有してもよい。
さらに、上記の移動制御機構は、前記ホルダに抵抗を与えて移動させるための手段を備えることもできる。前記ホルダの動きに抗する抵抗力を付与する場合のトルクは、0.3〜0.7kg・mであることが好ましい。さらに、上記移動制御機構は、前記ホルダを緩徐に移動させるための速度調節手段を備えることもできる。
また、前記移動制御機構を患者の寝台上に着脱自在に固定する固定具を備えることが好ましい。本発明は患者が横たわる場所であれば床上などどこでも使用することができるが、使用時には移動制御機構が動かないように固定されていることが好ましい。
さらに、本発明の運動装置は、患者の正中矢状面に合わせられる基準を有し、前記移動制御機構は、前記基準を中心として、前記左ホルダと前記右ホルダとを移動させてもよい。
さらに、本発明の寝具は、上記の運動装置を備えたことを特徴とするものである。
【発明の効果】
【0007】
本発明の運動装置によれば、患者の左脚および右脚を動作させて静脈血栓症の発症を防ぐことができる。
【図面の簡単な説明】
【0008】
【図1】左右方向に延在したアームの両端部に各ホルダを設けアーム中央部を前後方向に延びた回転軸線P周りに回転自在に保持して垂直方向で各ホルダを移動可能に保持する運動装置を示した説明図である。
【図2】移動制御機構が、左足と右足との一方から他方に向かう左右方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図3】弧状に形成されたアームに左ホルダおよび右ホルダを左右方向に移動自在に設けた運動装置の主要な構成を示した概略図である。
【図4】移動制御機構が、爪先と踵との一方から他方に向かう前後方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図5】移動制御機構が、左右方向および前後方向と略垂直な垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図6】移動制御機構が、左右方向および垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図7】移動制御機構が、左右方向および前後方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図8】移動制御機構が、左右方向と前後方向と垂直方向との3方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図9】クランク軸の両端部に各ホルダを設けクランク軸中央部を回転自在に保持することによって、移動制御機構が前後方向と垂直方向との2方向で同時に各ホルダを移動させる運動装置の要部を示した説明図である。
【図10】左右方向に延在したアームの両端部に各ホルダを設けアーム中央部を前後方向に延びた回転軸線P周りに回転自在に保持することによって、移動制御機構が垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図11】図10の運動装置が寝台上に固定された寝具を、垂直方向と垂直な平面で切断した断面図である。
【図12】図10の運動装置が寝台上に固定された寝具を、寝台の上側から観察した上面図である。
【図13】図10の運動装置が寝台上に固定された寝具を、寝具の側方から観察した側面図である。
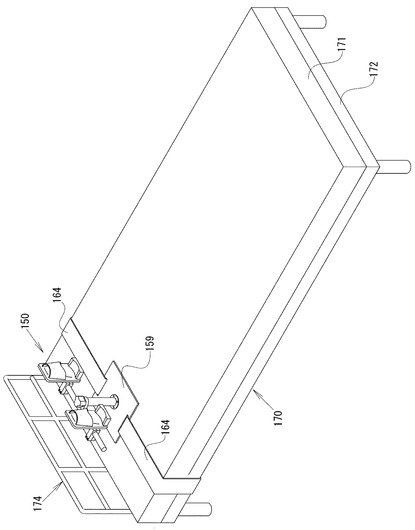
【図14】図10の運動装置が寝台上に固定された寝具の全体を示した斜視図である。
【発明を実施するための形態】
【0009】
本発明の運動装置は、人工股関節全置換術や人工膝関節全置換術など下肢に関する手術後における静脈血栓症の発症を防ぐこと、あるいは術後早期の運動器リハビリテーションを可能にすることを目的として完成されたものである。この目的を達成するため、本発明の運動装置は、患者の足を保持するホルダと、前記ホルダを移動可能に保持する移動制御機構とを備えることを特徴とする。本発明の運動装置は、通常は、両足用に2つのホルダを設けるが、左足および右足のいずれか一方のみの運動、あるいは片方の足を失った患者等のために片方だけを設けることも可能である。以下、本発明においては、説明の便宜上、両足用のホルダを設けた態様について説明する。
移動制御機構は、左足用のホルダと右足用のホルダとを、一方の足側から他方の足側へ向かう左右方向成分と、爪先側および踵側の一方から他方に向かう前後方向成分と、前記左右方向成分と前記前後方向成分とに略垂直な垂直方向成分とのうちの少なくともいずれか1つの方向成分を有する方向に各ホルダを移動可能に保持する。前記左右方向成分、前後方向成分および垂直方向成分を適宜組み合わせることにより、左右の足を前後方向に旋回させる運動、足首自体を旋回させる運動、踵を支点とした左右首振り運動、踵を支点として爪先を垂直方向に動かす運動(車のアクセルを踏み込むように動かす運動)など、より立体的な運動を行うことができる。
移動制御機構は、左ホルダおよび右ホルダのうちのどちらか一方のみを移動させてもよいし、両方を同時に移動させてもよいが、両方のホルダを同時に移動させる場合は、両ホルダを同調させて移動させることが好ましい。
前記移動制御機構においては、患者の脚力に応じて、前記ホルダの移動に抗するように0.1〜1.0kg・m、好ましくは0.3〜0.7kg・mのトルク(旋回抵抗)を付与することができる。
ところで、人工股関節全置換術や人工膝関節全置換術などは術後に激しい動作は避けるよう要求されることから、ホルダは緩徐に移動させるように移動速度を調節することができる。このようなホルダの移動速度としては、例えば、毎秒0.1〜30cmの範囲内が好ましく、とりわけ毎秒0.5〜10cmの範囲内が好ましい。このような移動速度を実現するために、ホルダの緩徐な移動を許可しつつホルダの急峻な移動を禁止する機構を運動装置に設けてもよい。このような機構を用いることにより、患者の脚が急激に動かされることを防止することができ、運動装置の安全性を高めることができる。このような機能を有する機構としては、例えば、ホルダの動きに抗するように抵抗力をホルダに付与する速度調節手段が挙げられる。速度調節手段がホルダの動きに対して抵抗力を加えるため、ホルダの動きは緩やかにされる。なお、速度調節手段は、前記旋回抵抗を付与した移動制御機構と兼用することができる。
【0010】
以下に本発明の運動装置の要部を例示するが、以下の態様はあくまで一例であり本発明は以下の例に限定されるものではない。
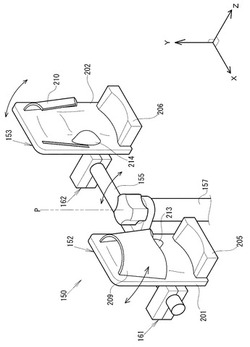
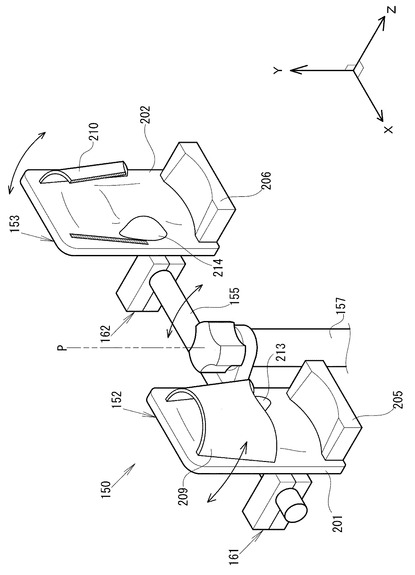
図1は、本発明の運動装置の一例を示す図であり、左右方向に延在したアームの両端部に足を保持するホルダを設け、アームの中央部を前後方向に延びた回転軸線周りに回転自在に保持して垂直方向に各ホルダを移動させる運動装置の要部を示した説明図である。図1に示すように、例えば運動装置150は、左ホルダ152、右ホルダ153、アーム155、メインシャフト157、マウント161、162等を備え、各ホルダ152、153がZ方向に移動できるように構成されている。メインシャフト157に、アーム155がメインシャフト157と略垂直をなすようにアーム155を固定し、アーム155の両サイドに、マウント161、162を配置する。左ホルダ152および右ホルダ153は、形状は特に限定されるものではなく、例えばスリッパ形状であり、患者の足裏と対向する足受け部201、202、足受け部201、202に対して略直角をなすように立設され踵が載置される踵ガイド部205、206、足受け部201、202および踵ガイド部205、206に載せられた足を拘束する拘束帯209、210を有する構造にすることができる。足受け部201、202には、患者の足底丘(土踏まず)に嵌合するように隆起した丘状部213、214を形成することが好ましく、丘状部213、214を足受け部201、202に形成することにより、患者の足を左右のホルダ152、153によりフィットさせることができる。
マウント161、162は、足を各方向に動かせるように、各ホルダ152、153を保持することができる。例えば、上下方向(図ではZ方向(身体の長手方向))に足を動かす運動、左右方向X又は上下方向(Z方向)に足首を首振りさせる運動(例えば踵を支点として足の先が左右に円弧を描くように足首を旋回させる運動、踵を支点として車のアクセルを踏むように爪先をZ方向に動かす運動)、あるいは足裏の略中心となる位置(例えば土踏まずの位置)にロッドエンドベアリングを設けて足首の球面旋回させる運動ができるようにすることができる。また、垂直方向Z、左右方向Xおよび前後方向Yのいずれにも可動させるために、あらゆる方向に配向させることができるボールジョイントを用いることもできる。
アーム155の回動範囲、および首振り角度や旋回角度は特に制限しないが、左右の足をZ方向に動かすときの旋回角度として例えばアーム155を片側に10度〜50度、好ましくは30〜45度、首振り角度として例えば5度〜50度、好ましくは30〜45度、球面での旋回角度として5〜20度、好ましくは15度とすることができる。
アーム155の回動角度を調節することで患者の脚の折り畳み角度を調節することができる。そして、患者の足を各ホルダ152、153に保持して患者が自律的に脚部を動かすことにより、患者は脚の筋肉を使い、静脈血栓症の発症を防ぐことができ、また術後早期のリハビリテーションが可能となる。さらに、術後の、痛み、筋力低下、体力低下、意欲低下などに対しても、この運動装置150を用いることにより脚の運動に対する意欲や運動の頻度を高めて、これら痛み、筋力低下、体力低下、意欲低下などの解消が期待できる。
【0011】
上記では、各ホルダを保持したアーム155を回転軸Pを中心に回動させて左右のホルダを移動させる構造および足首を旋回させる構造の運動装置を例示したが、本発明の態様はこれに限らず、例えば、以下に説明するもの(図2〜9)も可能である。
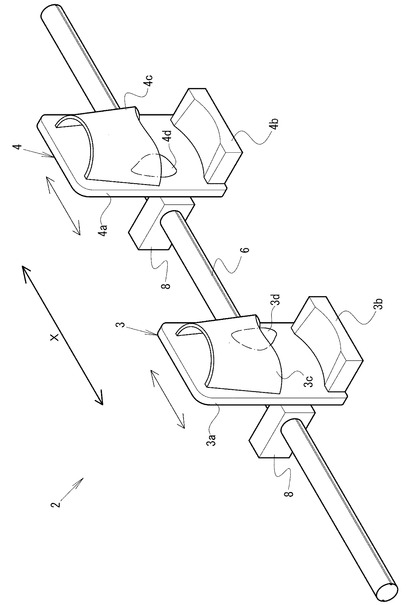
図2は左右方向に沿って左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図2に示すように、運動装置2は、アーム6、左ホルダ3、右ホルダ4を備える。アーム6は左右方向Xに延在し、このアーム6に左ホルダ3および右ホルダ4がアームに沿って移動できるように設けられている。
各ホルダ3、4はマウント8を備え、マウント8は各ホルダ3、4をアーム6の延びる方向にスライド移動可能に取り付ける。このように、左右方向に延びたアーム6と、このアーム6に各ホルダ3、4をスライド移動自在に取り付けるマウント8とを有する移動制御機構によって左ホルダ3および右ホルダ4は左右方向Xに沿って移動することができる。図2に示したホルダ3、4は例えばスリッパ形状であり(これに限定されるものではない)、図1と同様に患者の踵を置く部分と、足の甲をホールドする部分とから構成されている。左ホルダ3および右ホルダ4は、患者の足裏と対向する足受け部3a、4a、この足受け部3a、4a、に対して略直角をなすように立設され踵が載置される踵ガイド部3b、4b、これら足受け部3a、4aおよび踵ガイド部3b、4bに載せられた足の甲から爪先周辺が足受け部3a、4aから逸脱することがないように拘束する拘束帯3c、4cを有する。各ホルダ3、4の足受け部3a、4aには患者の足底丘に嵌合するように隆起した丘状部3d、4dが設けられている。足受け部3a、4aに丘状部3d、4dが形成されていることにより、患者は両足の土踏まずをホルダ3、4に、よりしっかりとホールドさせることが可能となるとともに、足底部の静脈叢を刺激することにつながる。
このような運動装置2により、患者は両脚を左右方向Xに開いたり閉じたりする動作を行うことができる。
【0012】
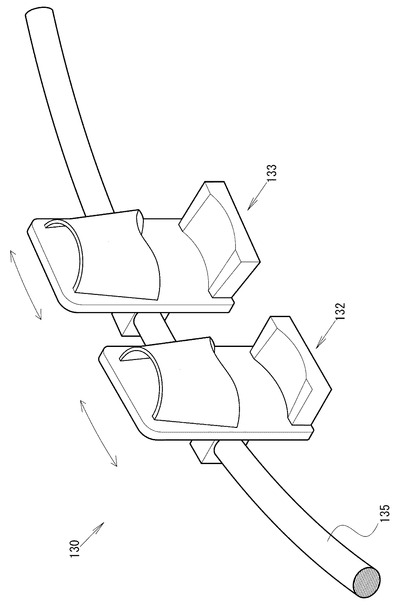
図2では直線状に形成されたアーム6に各ホルダ3、4を設けた運動装置を例示したが、脚は股関節の外転運動に合わせて、アームを弧状に形成してもよい。図3は弧状に形成されたアームに左ホルダおよび右ホルダを左右方向に移動自在に設けた運動装置の主要な構成を示した概略図である。
図3に示すように、運動装置130は左ホルダ132、右ホルダ133、アーム135を備え、各ホルダ132、133は弧状に形成されたアーム135上をアームの延在方向に沿って移動することができる。これにより患者はアーム135の延在方向(左右方向)により大きく開脚動作することができる。
【0013】
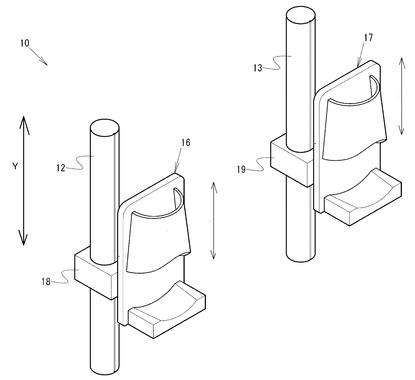
図4は、足の動きの前後方向(図では上下方法)に沿って左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図4に示すように、運動装置10は、左側アーム12、右側アーム13、左ホルダ16、右ホルダ17を備える。各アーム12、13は前後方向Yに延在し、これらアーム12、13に左ホルダ16および右ホルダ17がそれぞれ移動可能に設けられている。
各ホルダ16、17はマウント18、19を備え、マウント18、19は各ホルダ16、17をアーム12、13の延びる方向にスライド移動可能に取り付ける。このように、前後方向に延びたアーム12、13と、このアーム12、13に各ホルダ16、17をスライド移動自在に取り付けるマウント18、19とを有する移動制御機構によって左ホルダ16および右ホルダ17は前後方向Yに沿って移動することができる。
このような運動装置10により患者は両脚を前後方向Yに沿って開いたり閉じたりする動作を繰り返し行うことができる。
また、図4ではY方向に延在した直線形状のアーム12、13上に各ホルダ16、17を移動自在に設けた運動装置10を例示したが、このアームは図3で例示したように湾曲しているものを用いてもよい。図示はしないが、Y方向に延びるとともに足裏側で凹むように湾曲したアームを用いることにより患者は前後方向に脚をより大きく開脚動作することができる。
【0014】
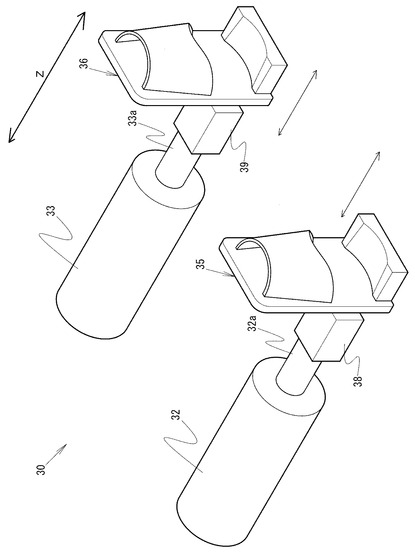
図5は、垂直方向(Z方向)に沿って左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図5に示すように、運動装置30は、左側ピストン機構32、右側ピストン機構33、左ホルダ35、右ホルダ36を備える。各ピストン機構32、33は垂直方向に伸縮し、このピストン機構32、33の先端部に左ホルダ35および右ホルダ36が取り付けられている。
ピストン機構32、33では垂直方向Zで突出/引込できるようにピストン32a、33aがシリンダによって支えられており、ピストン32a、33aの先端にマウント38、39が設けられている(なお、垂直方向Zは図2、図4で説明した左右方向Xおよび前後方向Yと略垂直な方向である)。このマウント38、39を介して各ホルダ35、36がピストン32a、33aに取り付けられ、左ホルダ35および右ホルダ36はそれぞれ垂直方向Zに沿って移動することができる。
このような運動装置30により患者は両脚を垂直方向Zに沿って伸ばしたり折り畳んだりすることができる。
【0015】
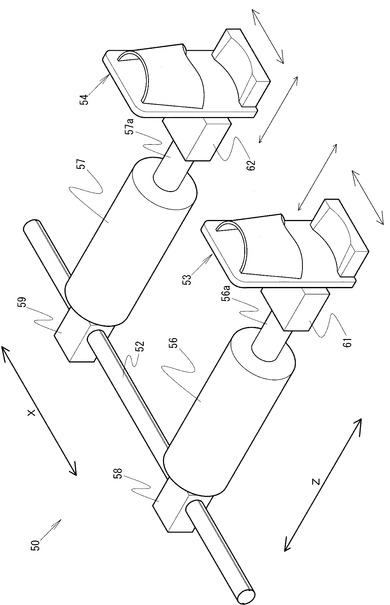
図6は左右方向成分と垂直方向成分とのうちの少なくともどちらかを成分として有する方向に左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図6に示すように、運動装置50は、左右方向Xに延在したアーム52、左ホルダ53、右ホルダ54、ピストン機構56、57を備え、アーム52に第1マウント58、59を介してピストン機構56、57が取り付けられている。これによりピストン機構56、57は左右方向Xに沿ってスライド移動することができる。
第2マウント61、62は各ピストン機構56、57のピストン56a、57a先端部に各ホルダ53、54を固定する。これにより各ホルダ53、54は、左右方向Xの左右方向成分と垂直方向Zの垂直方向成分との少なくともどちらかを有する方向に移動することができる。
このような運動装置50により患者は両脚を左右方向Xに沿って開いたり閉じたりしつつ垂直方向Zに沿って伸ばしたり折り畳んだりすることができる。
【0016】
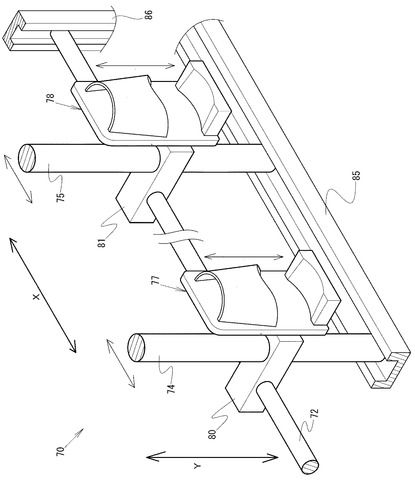
図7は左右方向成分および前後方向成分のうちの少なくともどちらか一方を成分として有する方向に左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図7に示すように、運動装置70は、左右方向Xで延在したアーム72、前後方向Yで延在したアーム74、75、左ホルダ77、右ホルダ78、マウント80、81を備え、マウント80、81はアーム72、74、75上を滑動する。アーム72は例えば左右方向Xに沿って移動自在にフレーム85によって保持され、アーム74、75はそれぞれ前後方向Yに沿って移動自在にフレーム86によって保持されている。これによってホルダ77、78は、左右方向Xの左右方向成分と前後方向Yの前後方向成分との少なくともどちらかを有する方向に移動することができる。
このような運動装置70により患者は両脚を左右方向Xに沿って開いたり閉じたりしつつ前後方向Yに沿って開いたり閉じたりすることができる。
【0017】
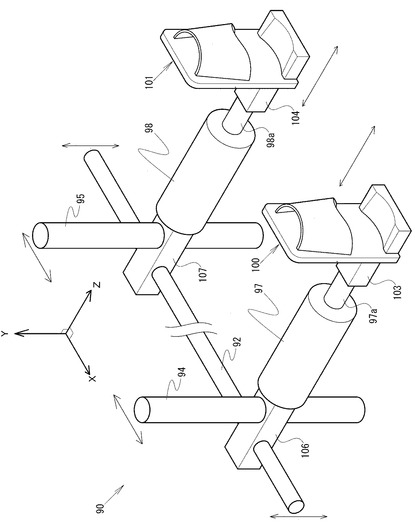
図8は左右方向成分と前後方向成分と垂直方向成分とのうちの少なくともいずれか1つを成分として有する方向に左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図8に示すように、運動装置90は、左右方向Xで延在したアーム92、前後方向Yで延在したアーム94、95、ピストン機構97、98、左ホルダ100、右ホルダ101、第1マウント103、104、第2マウント106、107を備え、第2マウント106、107は、アーム92、94、95上を滑動する。アーム92は例えば前後方向Yに沿って移動自在に図示しないフレームによって保持され、アーム94、95はそれぞれ左右方向Xに沿って移動自在に図示しないフレームによって保持されている。これにより、第2マウント106、107に保持されたピストン機構97、98は左右方向Xと前後方向Yとのうちの少なくともどちらか一方に沿って移動することができ、これらピストン機構97、98に支持された各ホルダ100、101は、左右方向Xの左右方向成分と前後方向Yの前後方向成分と垂直方向Zの垂直方向成分との少なくともいずれかを方向成分として有する方向に移動することができる。
このような運動装置70により患者は両脚を左右方向Xに沿って開いたり閉じたりする動作、前後方向Yに沿って開いたり閉じたりする動作、さらに垂直方向Zに沿って伸ばしたり折り畳んだりする動作を複合的に行うことができる。
【0018】
以上の図2〜図8で例示した運動装置は、基本的に左右のホルダを独立的に移動制御可能であるが、左右の両ホルダを同時に移動させてもよい。独立的に作動可能な左右のホルダを同時に移動させることにより、下肢運動のバラエティが増え、多様な運動が可能となる。
【0019】
また上記では、左右方向成分、前後方向成分、垂直方向成分とのうち少なくともいずれか1つの方向成分を有する方向に、各ホルダを独立的に移動させる移動制御機構について例示したが、左右のホルダの動きを同調させてもよい。左ホルダの移動と右ホルダの移動とを同調させることにより、運動の偏りを低減することができる。特にこの運動装置でリハビリを行う場合には、バランスのよい筋力回復を見込むことができる。
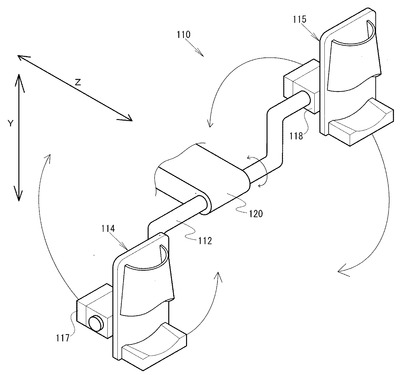
例えば図9は、クランク軸の両端部に各ホルダを設けクランク軸中央部を回転自在に保持することによって、左右でシンメトリーに移動制御機構が前後方向成分と垂直方向成分とのうちどちらかの方向成分を有する方向に各ホルダを移動させる運動装置の要部を示した説明図である。図9に示すように、運動装置110は、クランクシャフト112、左ホルダ114、右ホルダ115、マウント117、118、軸受け120を備える。各ホルダ114、115はマウント117、118を介してクランクシャフト112の両端部に回転自在に取り付けられ、クランクシャフト112の中央部は軸受け120によって回転可能に保持される。
これにより、各ホルダ114、115は前後方向成分および垂直方向成分のうちの少なくともどちらか一方を成分として有する方向に移動できるとともに、左ホルダ114と右ホルダ115とで同調して移動することができ、患者は自転車のペダルを漕ぐときのように脚を動作させることができる。
【0020】
次に、本発明の運動装置について図10〜図14を用いてより詳細に説明する。但し、以下の実施形態はあくまで一例であるので設計や構成材料などに応じて適宜変更することができる。
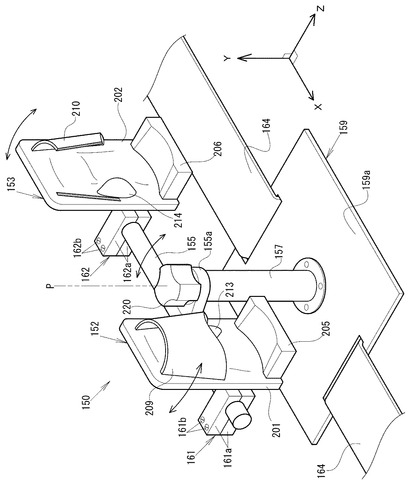
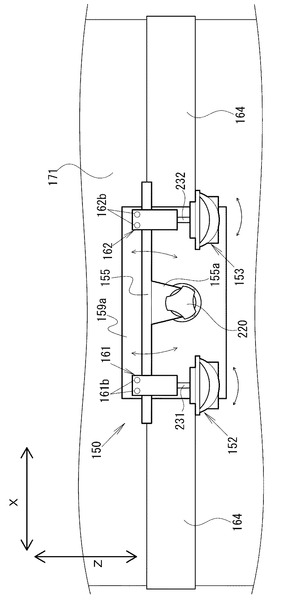
図10は、図1に示した運動装置をベッド等の寝具に固定できるようにしたものであり、左右方向に延在したアームの両端部に各ホルダを設けアーム中央部を前後方向に延びた回転軸線周りに回転自在に保持することによって、移動制御機構が垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
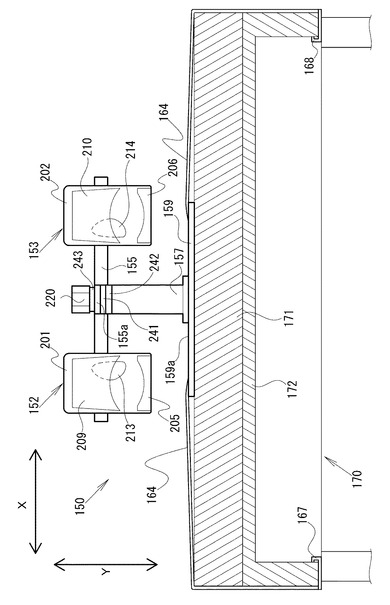
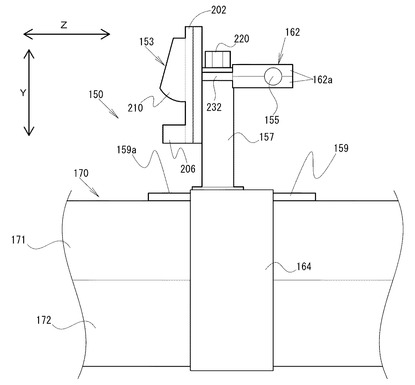
また、図11は、図10の運動装置が寝台上に固定された寝具を、垂直方向と垂直な平面で切断した断面図であり、図12は運動装置を寝台の上側から観察した上面図であり、図13は運動装置を寝具の右側方から観察した側面図である。さらに、図14は運動装置が寝台上に固定された寝具の全体を示した斜視図である。
図10〜図14に例示した運動装置は、左ホルダと右ホルダとを同調して垂直方向に移動させることができる。運動装置150は、左ホルダ152、右ホルダ153、移動制御機構を備え、移動制御機構は、アーム155、メインシャフト157、基盤159、ホルダアジャスタ(マウント)161、162、固定具(例えば締結ベルト164)等を備える。
【0021】
基盤159はベッドなどの寝具170上に載置され、基盤159上にはメインシャフト157が基盤面159aに対して略垂直に立設されている。メインシャフト157の先端には、アーム155がメインシャフト157と略垂直に設けられ、アーム155の両サイドにはホルダアジャスタ161、162が配置される。それぞれのホルダアジャスタ161、162は左ホルダ152および右ホルダ153のアーム155上での固定位置を、患者の足幅に合わせて調節することができる。足幅は特に限定されるものではないが、例えば150mm〜600mm、好ましくは250mm〜400mmとすることができる。基盤159の両サイドには移動制御機構をマットレスなどの寝台171上に固定するための固定具が設けられる。固定具は、移動制御機構をどのように固定するかに応じて適宜決定することができる。固定具として、ベルト、クランプ、その他の挟持具を用いて寝具170端部のフレーム174(図14参照)に移動制御機構を固定することができる。図11では、固定具として締結ベルト164を用い、この締結ベルト164がバックル167、168によって寝具170のフレーム172に係止されることにより、移動制御機構が寝台171上に固定される態様を示した。
メインシャフト157は、例えば基盤159の中央部に配置することができ、患者の正中矢状面(sagittal plane)に合わせられる基準として機能させることが可能である。
【0022】
左ホルダ152および右ホルダ153は、患者の足裏と対向する足受け部201、202、この足受け部201、202に対して略直角をなすように立設され踵が載置される踵ガイド部205、206、これら足受け部201、202および踵ガイド部205、206に載せられた足の甲から爪先周辺が足受け部201、202から逸脱することがないように拘束する拘束帯209、210を有する。
左ホルダ152および右ホルダ153の足受け部201、202には患者の足底丘に嵌合するように隆起した丘状部213、214が一体形成されている。足受け部201、202に丘状部213、214が形成されていることにより、患者は両足の土踏まずをホルダ152、153に、よりしっかりとホールドさせることが可能となる。
【0023】
左ホルダ152および右ホルダ153の裏側にはホルダアジャスタ161、162が配置され、このホルダアジャスタ161、162はアーム155上におけるホルダ152、153の固定位置を調節することができる。ホルダアジャスタ161、162は、例えば対向配置された一対の挟持片161a、162aと、この挟持片161a、162aの挟持力を調節するためのロックスクリュー161b、162bを備え、このロックスクリュー161b,162bを締弛することによりアーム155上でホルダアジャスタ161,162の固定位置を調節することができる。例えばホルダアジャスタ161、162の位置をアーム155上で調節する場合にはロックスクリュー161b、162bを弛めてホルダアジャスタ161、162の挟持力を弱め、ホルダアジャスタ161、162をアーム155上で固定する場合にはロックスクリュー161b、162bを締めてホルダアジャスタ161、162の挟持力を強める。
【0024】
ホルダアジャスタ161、162は左右方向で回動可能なロッドエンドベアリング231、232(図12参照)を備え、これにより各ホルダ152、153は左右方向X、前後方向Yおよび上下方向Zに首振り運動または球面旋回運動を行うことが可能となる(図12参照)。各ホルダが、垂直方向Zだけでなく左右方向Xや前後方向Yにも可動する場合には、あらゆる方向に配向させることができるボールジョイントを用いるとよい。ボールジョイントを用いることにより、ホルダの足受け部は常時患者の足裏と正対することができ、運動時に患者の脚関節にかかる負担を低減することができる。
首振りおよび旋回角度は特に制限しないが、例えば首振り運動として5〜50度、例えば5度、10度、15度、20度、25度、30度、35度、40度、45度、50度の振れ角度、球面での旋回角度として5〜20度、例えば5度、10度、15度、20度など適宜定めることができる。各ホルダ152、153が首振り運動を実施できることで、アーム155の回動時にホルダ152、153の足受け部201、202が患者の足裏と正対する可能性を高めることができ、患者の足裏がホルダ面に正対できないなど脚関節が許容できないような方向に足受け部201、202が向けられることを低減し、アーム155の回動時に患者の脚関節にかかる負担を低減している。
【0025】
アーム155の中央部にはシャフト157の先端に組み付けられるジョイントプレート155a(図10、図11参照)が一体形成され、このジョイントプレート155aがメインシャフト157の先端と、摩擦力調節用ナット220との間に挟まれている。
ジョイントプレート155aは摩擦係数の大きな第1摩擦板241を備え、メインシャフト157の先端は、ジョイントプレート155aの第1摩擦板241と対向配置される第2摩擦板242を備える。ナット220の下側には第1摩擦板241を第2摩擦板242に所定圧力で押圧するための皿バネ243が配置される。ナット220が締められることで皿バネ243を介して第1、第2摩擦板241、242が互いに所定圧力で当接し、ジョイントプレート155aがメインシャフト157に対して回動する際に摩擦力が形成される。
第2摩擦板242に対する第1摩擦板241の押圧力の調節はナット220の締弛によって行うことができ、このナット220を締める/弛めることにより、形成される摩擦力を調節することができる。摩擦力の調節範囲は特に制限しないが、例えば、0.3〜0.7kg・mのトルクに相当する摩擦力が形成されるように、ナット220を回して摩擦力を調節することが好ましい。
アーム155の回動範囲は特に制限しないが、例えばアーム155を片側に、5〜50度、例えば5度、10度、15度、20度、25度、30度、35度、40度、45度、50度など回動させてよく、アーム155の回動角度を調節することで患者の脚の折り畳み角度を調節することができる。
【0026】
次に本発明の作用について説明する。
まず、静脈血栓症予防を目的として下肢に運動が必要な患者のため、運動装置150は寝具170の寝台171上に取り付けられる(図14)。運動装置150の取り付けは、例えば運動装置150の基盤159に設けられたベルト164を寝具170に巻きつけてバックル167、168で留めることにより固定することができる。このとき、運動装置150の取り付け位置は患者の背丈に合わせて適宜調節するとよく、さらに、メインシャフト157を患者の正中矢状面辺りに合わせることが好ましい。
【0027】
運動装置150の固定後、寝台171上ホルダ152、153に患者の足を嵌め込み固定する。各ホルダ152、153に左足および右足を固定する際は、患者の左足と右脚との間隔に応じて、各ホルダ152、153がメインシャフト157に対して略軸対称に配置されるようにホルダアジャスタ161、162の固定位置を調節することができる。患者の正中矢状面に合わせられたメインシャフト157に対して各ホルダ152、153を軸対称に配置することで、左右対称に運動を実施することができ、バランスのよい運動を実施することができる。
【0028】
患者の左足、右足がそれぞれホルダ152、153に固定された後、患者の下肢の運動が開始される。下肢の運動は自己の筋力のみで自律的に行うことが好ましい。人工股関節全置換術や人工膝関節全置換術などの術後は、筋力が著しく低下している、股関節/膝関節が固い、さらに麻痺を有するなどの理由により自力で十分に動かせない場合では、患者は自分のできる範囲で脚を動かせばよい。また、患者が自力で足を動かす際に理学療法士や介護人などのヘルパーが下肢の運動をサポートすることも可能である。
各ホルダが垂直方向Zに沿って移動することにより、患者の足、脛部、膝、大腿部、臀部など脚部全体が動作する。アーム155の動きにはトルクが付与されるため、これによりそれぞれのホルダ152、153は患者に負荷をかけることができる。
【0029】
また、患者が自律的に運動を行うことで静脈血栓症の発症を防ぐことができる。そして、患者の脚の動きに対してトルクが働き、これにより下肢に負荷をかけることが可能となりアイソトニックトレーニングを実施することができる。このアイソトニックトレーニングによりリハビリの効果が期待できる。例えば、患者の下肢の筋力を回復することができ、よりスムーズに実際の歩行訓練に移行することができる。
以上のように、本発明の運動装置150は、患者の足を保持する各ホルダ152、153の動きによって患者の脚部を運動させ、静脈血栓症の発症を防ぐことができる。また、下肢を自力である程度動かせるようになった後には、リハビリ用の運動装置として使用することができる。さらに、血栓の形成を予防するための薬剤の投与が不要になることが期待でき、入院期間の短縮や医療費の削減、合併症の低減なども期待できる。
上記では、垂直方向Zに沿ってホルダ152、153が移動したが、運動装置に図2や図4さらに図6〜図9のいずれかで例示したような構造を組み込んでもよい。例えば、図9で例示した構造を運動装置に組み込んだ場合、股関節や膝関節の使われ方や脚部筋肉の使用部位が上述した運動装置150を使用した場合と異なるため、患者に興趣の異なる運動を提供することができる。
【0030】
上記の実施形態では、第1、第2摩擦板241、242を用いてホルダの動きに抗する抵抗力を形成したが、抵抗力の形成方法はこれに限らず、他の方法を用いてもよい。
例えば、電磁駆動式のアクチュエータを用いてホルダの動きに抗する抵抗力を形成することもできる。このようなアクチュエータを用いることにより抵抗力の調節を容易に行うことができる。
例えば、血栓症の予防を目的に下肢を動作させる場合には、抵抗力が最も弱くなるようにアクチュエータを設定し、自力で下肢を動かせるようになってからはアクチュエータが発揮する抵抗力を段階的に強める。このようにして下肢をリハビリすることで、血栓症の予防だけでなく患者の下肢に徐々に負荷を与えてトレーニングすることができる。これにより患者の下肢の筋力回復がある程度期待でき、より利便性の高い運動装置を提供することができる。
【符号の説明】
【0031】
2、10、30、50、70、90、110 運動装置
3、16、35、53、77、100、114 左ホルダ
4、17、36、54、78、101、115 右ホルダ
6 アーム
8 マウント
32、33ピストン機構
112 クランクシャフト
120 軸受け
150 運動装置
152 左ホルダ
153 右ホルダ
155 アーム
155a ジョイントプレート
157 メインシャフト
159 基盤
159a 基盤面
161、162 ホルダアジャスタ
161a、162a 挟持片
161b、162b ロックスクリュー
164 ベルト
167、168 バックル
170 寝具
171 寝台
174 フレーム
201、202 足受け部
205、206 踵ガイド部
209、210 拘束帯
213、214 丘状部
220 ナット
231、232 ロッドエンドベアリング
241 第1摩擦板
242 第2摩擦板
【技術分野】
【0001】
本発明は、下肢の運動装置に関するものであり、さらに詳しくは下肢を動作させる運動装置に関するものである。
【背景技術】
【0002】
近年、人工股関節全置換術後および人工膝関節全置換術後に、血栓の発生を低減させるための研究が進められている。例えば人工股関節全置換術後または人工膝関節全置換術後に脚を長期間静置させたままにした場合では、下肢の静脈に血栓が形成されてしまうことがあった。静脈内に血栓が形成されるとエコノミークラス症候群に代表されるように、虚血や梗塞などの危険性が高まり、重体に陥る危険性もある。そこで、血栓の形成を防止するために下肢を運動させることが考えられたが、実際には、例えば特許文献1に示されるような常時下肢を圧迫する弾性ストッキングや、特許文献2に示されるようなバルーン状のエアバッグ構造体を膨縮させて下肢を間欠的に圧迫する装置が術後の入院期間中に用いられることがほとんどであり、この弾性ストッキングや圧迫装置を用いることにより、血栓の形成割合を低減している。
【0003】
しかしながら、血栓の形成に関してより高い抑制効果を期待する場合には、下肢を実際に動かす必要があり、可能であれば患者が自力(自動ともいう)で下肢を動かすことが好ましいと考えられているが、弾性ストッキングや圧迫装置を用いた運動では下肢を自力で動作させることがなく、このため、血栓形成の抑制に関してはある程度の効果しか期待することができなかった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−076250号公報
【特許文献2】国際公開第2008/044400号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記の事情に鑑みてなされたものであり、患者が自力で下肢を動かすことにより静脈血栓のリスクを減じることができるという考察に基づき、患者が自力で下肢の動作が可能な装置を提供して下肢の外科手術後における静脈血栓症の発症を防ぐことを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の運動装置は、
患者の足を保持するホルダと、
前記ホルダを移動可能に保持する移動制御機構とを備えることを特徴とする。
このとき、前記移動制御機構は、
一方の足側から他方の足側へ向かう左右方向成分と、
爪先側および踵側の一方から他方に向かう前後方向成分と、
前記左右方向成分と前記前後方向成分とに略垂直な垂直方向成分と、
のうちの少なくともいずれか1つの方向成分を有する方向に前記ホルダを移動可能に保持してもよい。
また、前記移動制御機構が、左ホルダの移動および右ホルダの移動を同調させることが好ましい。同調時の足の移動態様としては、両足を必ずしも同じ方向へ移動させる必要はなく、一方が前方へ動くときに他方が後方へ動く、一方が左側へ動くときに他方が右側へ動くなど、それぞれの足が異なる方向へ動くようにしてもよい。
また、前記ホルダは、足底弓に嵌合する丘状部を有してもよい。
さらに、上記の移動制御機構は、前記ホルダに抵抗を与えて移動させるための手段を備えることもできる。前記ホルダの動きに抗する抵抗力を付与する場合のトルクは、0.3〜0.7kg・mであることが好ましい。さらに、上記移動制御機構は、前記ホルダを緩徐に移動させるための速度調節手段を備えることもできる。
また、前記移動制御機構を患者の寝台上に着脱自在に固定する固定具を備えることが好ましい。本発明は患者が横たわる場所であれば床上などどこでも使用することができるが、使用時には移動制御機構が動かないように固定されていることが好ましい。
さらに、本発明の運動装置は、患者の正中矢状面に合わせられる基準を有し、前記移動制御機構は、前記基準を中心として、前記左ホルダと前記右ホルダとを移動させてもよい。
さらに、本発明の寝具は、上記の運動装置を備えたことを特徴とするものである。
【発明の効果】
【0007】
本発明の運動装置によれば、患者の左脚および右脚を動作させて静脈血栓症の発症を防ぐことができる。
【図面の簡単な説明】
【0008】
【図1】左右方向に延在したアームの両端部に各ホルダを設けアーム中央部を前後方向に延びた回転軸線P周りに回転自在に保持して垂直方向で各ホルダを移動可能に保持する運動装置を示した説明図である。
【図2】移動制御機構が、左足と右足との一方から他方に向かう左右方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図3】弧状に形成されたアームに左ホルダおよび右ホルダを左右方向に移動自在に設けた運動装置の主要な構成を示した概略図である。
【図4】移動制御機構が、爪先と踵との一方から他方に向かう前後方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図5】移動制御機構が、左右方向および前後方向と略垂直な垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図6】移動制御機構が、左右方向および垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図7】移動制御機構が、左右方向および前後方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図8】移動制御機構が、左右方向と前後方向と垂直方向との3方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図9】クランク軸の両端部に各ホルダを設けクランク軸中央部を回転自在に保持することによって、移動制御機構が前後方向と垂直方向との2方向で同時に各ホルダを移動させる運動装置の要部を示した説明図である。
【図10】左右方向に延在したアームの両端部に各ホルダを設けアーム中央部を前後方向に延びた回転軸線P周りに回転自在に保持することによって、移動制御機構が垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
【図11】図10の運動装置が寝台上に固定された寝具を、垂直方向と垂直な平面で切断した断面図である。
【図12】図10の運動装置が寝台上に固定された寝具を、寝台の上側から観察した上面図である。
【図13】図10の運動装置が寝台上に固定された寝具を、寝具の側方から観察した側面図である。
【図14】図10の運動装置が寝台上に固定された寝具の全体を示した斜視図である。
【発明を実施するための形態】
【0009】
本発明の運動装置は、人工股関節全置換術や人工膝関節全置換術など下肢に関する手術後における静脈血栓症の発症を防ぐこと、あるいは術後早期の運動器リハビリテーションを可能にすることを目的として完成されたものである。この目的を達成するため、本発明の運動装置は、患者の足を保持するホルダと、前記ホルダを移動可能に保持する移動制御機構とを備えることを特徴とする。本発明の運動装置は、通常は、両足用に2つのホルダを設けるが、左足および右足のいずれか一方のみの運動、あるいは片方の足を失った患者等のために片方だけを設けることも可能である。以下、本発明においては、説明の便宜上、両足用のホルダを設けた態様について説明する。
移動制御機構は、左足用のホルダと右足用のホルダとを、一方の足側から他方の足側へ向かう左右方向成分と、爪先側および踵側の一方から他方に向かう前後方向成分と、前記左右方向成分と前記前後方向成分とに略垂直な垂直方向成分とのうちの少なくともいずれか1つの方向成分を有する方向に各ホルダを移動可能に保持する。前記左右方向成分、前後方向成分および垂直方向成分を適宜組み合わせることにより、左右の足を前後方向に旋回させる運動、足首自体を旋回させる運動、踵を支点とした左右首振り運動、踵を支点として爪先を垂直方向に動かす運動(車のアクセルを踏み込むように動かす運動)など、より立体的な運動を行うことができる。
移動制御機構は、左ホルダおよび右ホルダのうちのどちらか一方のみを移動させてもよいし、両方を同時に移動させてもよいが、両方のホルダを同時に移動させる場合は、両ホルダを同調させて移動させることが好ましい。
前記移動制御機構においては、患者の脚力に応じて、前記ホルダの移動に抗するように0.1〜1.0kg・m、好ましくは0.3〜0.7kg・mのトルク(旋回抵抗)を付与することができる。
ところで、人工股関節全置換術や人工膝関節全置換術などは術後に激しい動作は避けるよう要求されることから、ホルダは緩徐に移動させるように移動速度を調節することができる。このようなホルダの移動速度としては、例えば、毎秒0.1〜30cmの範囲内が好ましく、とりわけ毎秒0.5〜10cmの範囲内が好ましい。このような移動速度を実現するために、ホルダの緩徐な移動を許可しつつホルダの急峻な移動を禁止する機構を運動装置に設けてもよい。このような機構を用いることにより、患者の脚が急激に動かされることを防止することができ、運動装置の安全性を高めることができる。このような機能を有する機構としては、例えば、ホルダの動きに抗するように抵抗力をホルダに付与する速度調節手段が挙げられる。速度調節手段がホルダの動きに対して抵抗力を加えるため、ホルダの動きは緩やかにされる。なお、速度調節手段は、前記旋回抵抗を付与した移動制御機構と兼用することができる。
【0010】
以下に本発明の運動装置の要部を例示するが、以下の態様はあくまで一例であり本発明は以下の例に限定されるものではない。
図1は、本発明の運動装置の一例を示す図であり、左右方向に延在したアームの両端部に足を保持するホルダを設け、アームの中央部を前後方向に延びた回転軸線周りに回転自在に保持して垂直方向に各ホルダを移動させる運動装置の要部を示した説明図である。図1に示すように、例えば運動装置150は、左ホルダ152、右ホルダ153、アーム155、メインシャフト157、マウント161、162等を備え、各ホルダ152、153がZ方向に移動できるように構成されている。メインシャフト157に、アーム155がメインシャフト157と略垂直をなすようにアーム155を固定し、アーム155の両サイドに、マウント161、162を配置する。左ホルダ152および右ホルダ153は、形状は特に限定されるものではなく、例えばスリッパ形状であり、患者の足裏と対向する足受け部201、202、足受け部201、202に対して略直角をなすように立設され踵が載置される踵ガイド部205、206、足受け部201、202および踵ガイド部205、206に載せられた足を拘束する拘束帯209、210を有する構造にすることができる。足受け部201、202には、患者の足底丘(土踏まず)に嵌合するように隆起した丘状部213、214を形成することが好ましく、丘状部213、214を足受け部201、202に形成することにより、患者の足を左右のホルダ152、153によりフィットさせることができる。
マウント161、162は、足を各方向に動かせるように、各ホルダ152、153を保持することができる。例えば、上下方向(図ではZ方向(身体の長手方向))に足を動かす運動、左右方向X又は上下方向(Z方向)に足首を首振りさせる運動(例えば踵を支点として足の先が左右に円弧を描くように足首を旋回させる運動、踵を支点として車のアクセルを踏むように爪先をZ方向に動かす運動)、あるいは足裏の略中心となる位置(例えば土踏まずの位置)にロッドエンドベアリングを設けて足首の球面旋回させる運動ができるようにすることができる。また、垂直方向Z、左右方向Xおよび前後方向Yのいずれにも可動させるために、あらゆる方向に配向させることができるボールジョイントを用いることもできる。
アーム155の回動範囲、および首振り角度や旋回角度は特に制限しないが、左右の足をZ方向に動かすときの旋回角度として例えばアーム155を片側に10度〜50度、好ましくは30〜45度、首振り角度として例えば5度〜50度、好ましくは30〜45度、球面での旋回角度として5〜20度、好ましくは15度とすることができる。
アーム155の回動角度を調節することで患者の脚の折り畳み角度を調節することができる。そして、患者の足を各ホルダ152、153に保持して患者が自律的に脚部を動かすことにより、患者は脚の筋肉を使い、静脈血栓症の発症を防ぐことができ、また術後早期のリハビリテーションが可能となる。さらに、術後の、痛み、筋力低下、体力低下、意欲低下などに対しても、この運動装置150を用いることにより脚の運動に対する意欲や運動の頻度を高めて、これら痛み、筋力低下、体力低下、意欲低下などの解消が期待できる。
【0011】
上記では、各ホルダを保持したアーム155を回転軸Pを中心に回動させて左右のホルダを移動させる構造および足首を旋回させる構造の運動装置を例示したが、本発明の態様はこれに限らず、例えば、以下に説明するもの(図2〜9)も可能である。
図2は左右方向に沿って左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図2に示すように、運動装置2は、アーム6、左ホルダ3、右ホルダ4を備える。アーム6は左右方向Xに延在し、このアーム6に左ホルダ3および右ホルダ4がアームに沿って移動できるように設けられている。
各ホルダ3、4はマウント8を備え、マウント8は各ホルダ3、4をアーム6の延びる方向にスライド移動可能に取り付ける。このように、左右方向に延びたアーム6と、このアーム6に各ホルダ3、4をスライド移動自在に取り付けるマウント8とを有する移動制御機構によって左ホルダ3および右ホルダ4は左右方向Xに沿って移動することができる。図2に示したホルダ3、4は例えばスリッパ形状であり(これに限定されるものではない)、図1と同様に患者の踵を置く部分と、足の甲をホールドする部分とから構成されている。左ホルダ3および右ホルダ4は、患者の足裏と対向する足受け部3a、4a、この足受け部3a、4a、に対して略直角をなすように立設され踵が載置される踵ガイド部3b、4b、これら足受け部3a、4aおよび踵ガイド部3b、4bに載せられた足の甲から爪先周辺が足受け部3a、4aから逸脱することがないように拘束する拘束帯3c、4cを有する。各ホルダ3、4の足受け部3a、4aには患者の足底丘に嵌合するように隆起した丘状部3d、4dが設けられている。足受け部3a、4aに丘状部3d、4dが形成されていることにより、患者は両足の土踏まずをホルダ3、4に、よりしっかりとホールドさせることが可能となるとともに、足底部の静脈叢を刺激することにつながる。
このような運動装置2により、患者は両脚を左右方向Xに開いたり閉じたりする動作を行うことができる。
【0012】
図2では直線状に形成されたアーム6に各ホルダ3、4を設けた運動装置を例示したが、脚は股関節の外転運動に合わせて、アームを弧状に形成してもよい。図3は弧状に形成されたアームに左ホルダおよび右ホルダを左右方向に移動自在に設けた運動装置の主要な構成を示した概略図である。
図3に示すように、運動装置130は左ホルダ132、右ホルダ133、アーム135を備え、各ホルダ132、133は弧状に形成されたアーム135上をアームの延在方向に沿って移動することができる。これにより患者はアーム135の延在方向(左右方向)により大きく開脚動作することができる。
【0013】
図4は、足の動きの前後方向(図では上下方法)に沿って左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図4に示すように、運動装置10は、左側アーム12、右側アーム13、左ホルダ16、右ホルダ17を備える。各アーム12、13は前後方向Yに延在し、これらアーム12、13に左ホルダ16および右ホルダ17がそれぞれ移動可能に設けられている。
各ホルダ16、17はマウント18、19を備え、マウント18、19は各ホルダ16、17をアーム12、13の延びる方向にスライド移動可能に取り付ける。このように、前後方向に延びたアーム12、13と、このアーム12、13に各ホルダ16、17をスライド移動自在に取り付けるマウント18、19とを有する移動制御機構によって左ホルダ16および右ホルダ17は前後方向Yに沿って移動することができる。
このような運動装置10により患者は両脚を前後方向Yに沿って開いたり閉じたりする動作を繰り返し行うことができる。
また、図4ではY方向に延在した直線形状のアーム12、13上に各ホルダ16、17を移動自在に設けた運動装置10を例示したが、このアームは図3で例示したように湾曲しているものを用いてもよい。図示はしないが、Y方向に延びるとともに足裏側で凹むように湾曲したアームを用いることにより患者は前後方向に脚をより大きく開脚動作することができる。
【0014】
図5は、垂直方向(Z方向)に沿って左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図5に示すように、運動装置30は、左側ピストン機構32、右側ピストン機構33、左ホルダ35、右ホルダ36を備える。各ピストン機構32、33は垂直方向に伸縮し、このピストン機構32、33の先端部に左ホルダ35および右ホルダ36が取り付けられている。
ピストン機構32、33では垂直方向Zで突出/引込できるようにピストン32a、33aがシリンダによって支えられており、ピストン32a、33aの先端にマウント38、39が設けられている(なお、垂直方向Zは図2、図4で説明した左右方向Xおよび前後方向Yと略垂直な方向である)。このマウント38、39を介して各ホルダ35、36がピストン32a、33aに取り付けられ、左ホルダ35および右ホルダ36はそれぞれ垂直方向Zに沿って移動することができる。
このような運動装置30により患者は両脚を垂直方向Zに沿って伸ばしたり折り畳んだりすることができる。
【0015】
図6は左右方向成分と垂直方向成分とのうちの少なくともどちらかを成分として有する方向に左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図6に示すように、運動装置50は、左右方向Xに延在したアーム52、左ホルダ53、右ホルダ54、ピストン機構56、57を備え、アーム52に第1マウント58、59を介してピストン機構56、57が取り付けられている。これによりピストン機構56、57は左右方向Xに沿ってスライド移動することができる。
第2マウント61、62は各ピストン機構56、57のピストン56a、57a先端部に各ホルダ53、54を固定する。これにより各ホルダ53、54は、左右方向Xの左右方向成分と垂直方向Zの垂直方向成分との少なくともどちらかを有する方向に移動することができる。
このような運動装置50により患者は両脚を左右方向Xに沿って開いたり閉じたりしつつ垂直方向Zに沿って伸ばしたり折り畳んだりすることができる。
【0016】
図7は左右方向成分および前後方向成分のうちの少なくともどちらか一方を成分として有する方向に左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図7に示すように、運動装置70は、左右方向Xで延在したアーム72、前後方向Yで延在したアーム74、75、左ホルダ77、右ホルダ78、マウント80、81を備え、マウント80、81はアーム72、74、75上を滑動する。アーム72は例えば左右方向Xに沿って移動自在にフレーム85によって保持され、アーム74、75はそれぞれ前後方向Yに沿って移動自在にフレーム86によって保持されている。これによってホルダ77、78は、左右方向Xの左右方向成分と前後方向Yの前後方向成分との少なくともどちらかを有する方向に移動することができる。
このような運動装置70により患者は両脚を左右方向Xに沿って開いたり閉じたりしつつ前後方向Yに沿って開いたり閉じたりすることができる。
【0017】
図8は左右方向成分と前後方向成分と垂直方向成分とのうちの少なくともいずれか1つを成分として有する方向に左ホルダおよび右ホルダの移動が可能な運動装置の主要な構成を示した概略図である。図8に示すように、運動装置90は、左右方向Xで延在したアーム92、前後方向Yで延在したアーム94、95、ピストン機構97、98、左ホルダ100、右ホルダ101、第1マウント103、104、第2マウント106、107を備え、第2マウント106、107は、アーム92、94、95上を滑動する。アーム92は例えば前後方向Yに沿って移動自在に図示しないフレームによって保持され、アーム94、95はそれぞれ左右方向Xに沿って移動自在に図示しないフレームによって保持されている。これにより、第2マウント106、107に保持されたピストン機構97、98は左右方向Xと前後方向Yとのうちの少なくともどちらか一方に沿って移動することができ、これらピストン機構97、98に支持された各ホルダ100、101は、左右方向Xの左右方向成分と前後方向Yの前後方向成分と垂直方向Zの垂直方向成分との少なくともいずれかを方向成分として有する方向に移動することができる。
このような運動装置70により患者は両脚を左右方向Xに沿って開いたり閉じたりする動作、前後方向Yに沿って開いたり閉じたりする動作、さらに垂直方向Zに沿って伸ばしたり折り畳んだりする動作を複合的に行うことができる。
【0018】
以上の図2〜図8で例示した運動装置は、基本的に左右のホルダを独立的に移動制御可能であるが、左右の両ホルダを同時に移動させてもよい。独立的に作動可能な左右のホルダを同時に移動させることにより、下肢運動のバラエティが増え、多様な運動が可能となる。
【0019】
また上記では、左右方向成分、前後方向成分、垂直方向成分とのうち少なくともいずれか1つの方向成分を有する方向に、各ホルダを独立的に移動させる移動制御機構について例示したが、左右のホルダの動きを同調させてもよい。左ホルダの移動と右ホルダの移動とを同調させることにより、運動の偏りを低減することができる。特にこの運動装置でリハビリを行う場合には、バランスのよい筋力回復を見込むことができる。
例えば図9は、クランク軸の両端部に各ホルダを設けクランク軸中央部を回転自在に保持することによって、左右でシンメトリーに移動制御機構が前後方向成分と垂直方向成分とのうちどちらかの方向成分を有する方向に各ホルダを移動させる運動装置の要部を示した説明図である。図9に示すように、運動装置110は、クランクシャフト112、左ホルダ114、右ホルダ115、マウント117、118、軸受け120を備える。各ホルダ114、115はマウント117、118を介してクランクシャフト112の両端部に回転自在に取り付けられ、クランクシャフト112の中央部は軸受け120によって回転可能に保持される。
これにより、各ホルダ114、115は前後方向成分および垂直方向成分のうちの少なくともどちらか一方を成分として有する方向に移動できるとともに、左ホルダ114と右ホルダ115とで同調して移動することができ、患者は自転車のペダルを漕ぐときのように脚を動作させることができる。
【0020】
次に、本発明の運動装置について図10〜図14を用いてより詳細に説明する。但し、以下の実施形態はあくまで一例であるので設計や構成材料などに応じて適宜変更することができる。
図10は、図1に示した運動装置をベッド等の寝具に固定できるようにしたものであり、左右方向に延在したアームの両端部に各ホルダを設けアーム中央部を前後方向に延びた回転軸線周りに回転自在に保持することによって、移動制御機構が垂直方向で各ホルダを移動させる運動装置の要部を示した説明図である。
また、図11は、図10の運動装置が寝台上に固定された寝具を、垂直方向と垂直な平面で切断した断面図であり、図12は運動装置を寝台の上側から観察した上面図であり、図13は運動装置を寝具の右側方から観察した側面図である。さらに、図14は運動装置が寝台上に固定された寝具の全体を示した斜視図である。
図10〜図14に例示した運動装置は、左ホルダと右ホルダとを同調して垂直方向に移動させることができる。運動装置150は、左ホルダ152、右ホルダ153、移動制御機構を備え、移動制御機構は、アーム155、メインシャフト157、基盤159、ホルダアジャスタ(マウント)161、162、固定具(例えば締結ベルト164)等を備える。
【0021】
基盤159はベッドなどの寝具170上に載置され、基盤159上にはメインシャフト157が基盤面159aに対して略垂直に立設されている。メインシャフト157の先端には、アーム155がメインシャフト157と略垂直に設けられ、アーム155の両サイドにはホルダアジャスタ161、162が配置される。それぞれのホルダアジャスタ161、162は左ホルダ152および右ホルダ153のアーム155上での固定位置を、患者の足幅に合わせて調節することができる。足幅は特に限定されるものではないが、例えば150mm〜600mm、好ましくは250mm〜400mmとすることができる。基盤159の両サイドには移動制御機構をマットレスなどの寝台171上に固定するための固定具が設けられる。固定具は、移動制御機構をどのように固定するかに応じて適宜決定することができる。固定具として、ベルト、クランプ、その他の挟持具を用いて寝具170端部のフレーム174(図14参照)に移動制御機構を固定することができる。図11では、固定具として締結ベルト164を用い、この締結ベルト164がバックル167、168によって寝具170のフレーム172に係止されることにより、移動制御機構が寝台171上に固定される態様を示した。
メインシャフト157は、例えば基盤159の中央部に配置することができ、患者の正中矢状面(sagittal plane)に合わせられる基準として機能させることが可能である。
【0022】
左ホルダ152および右ホルダ153は、患者の足裏と対向する足受け部201、202、この足受け部201、202に対して略直角をなすように立設され踵が載置される踵ガイド部205、206、これら足受け部201、202および踵ガイド部205、206に載せられた足の甲から爪先周辺が足受け部201、202から逸脱することがないように拘束する拘束帯209、210を有する。
左ホルダ152および右ホルダ153の足受け部201、202には患者の足底丘に嵌合するように隆起した丘状部213、214が一体形成されている。足受け部201、202に丘状部213、214が形成されていることにより、患者は両足の土踏まずをホルダ152、153に、よりしっかりとホールドさせることが可能となる。
【0023】
左ホルダ152および右ホルダ153の裏側にはホルダアジャスタ161、162が配置され、このホルダアジャスタ161、162はアーム155上におけるホルダ152、153の固定位置を調節することができる。ホルダアジャスタ161、162は、例えば対向配置された一対の挟持片161a、162aと、この挟持片161a、162aの挟持力を調節するためのロックスクリュー161b、162bを備え、このロックスクリュー161b,162bを締弛することによりアーム155上でホルダアジャスタ161,162の固定位置を調節することができる。例えばホルダアジャスタ161、162の位置をアーム155上で調節する場合にはロックスクリュー161b、162bを弛めてホルダアジャスタ161、162の挟持力を弱め、ホルダアジャスタ161、162をアーム155上で固定する場合にはロックスクリュー161b、162bを締めてホルダアジャスタ161、162の挟持力を強める。
【0024】
ホルダアジャスタ161、162は左右方向で回動可能なロッドエンドベアリング231、232(図12参照)を備え、これにより各ホルダ152、153は左右方向X、前後方向Yおよび上下方向Zに首振り運動または球面旋回運動を行うことが可能となる(図12参照)。各ホルダが、垂直方向Zだけでなく左右方向Xや前後方向Yにも可動する場合には、あらゆる方向に配向させることができるボールジョイントを用いるとよい。ボールジョイントを用いることにより、ホルダの足受け部は常時患者の足裏と正対することができ、運動時に患者の脚関節にかかる負担を低減することができる。
首振りおよび旋回角度は特に制限しないが、例えば首振り運動として5〜50度、例えば5度、10度、15度、20度、25度、30度、35度、40度、45度、50度の振れ角度、球面での旋回角度として5〜20度、例えば5度、10度、15度、20度など適宜定めることができる。各ホルダ152、153が首振り運動を実施できることで、アーム155の回動時にホルダ152、153の足受け部201、202が患者の足裏と正対する可能性を高めることができ、患者の足裏がホルダ面に正対できないなど脚関節が許容できないような方向に足受け部201、202が向けられることを低減し、アーム155の回動時に患者の脚関節にかかる負担を低減している。
【0025】
アーム155の中央部にはシャフト157の先端に組み付けられるジョイントプレート155a(図10、図11参照)が一体形成され、このジョイントプレート155aがメインシャフト157の先端と、摩擦力調節用ナット220との間に挟まれている。
ジョイントプレート155aは摩擦係数の大きな第1摩擦板241を備え、メインシャフト157の先端は、ジョイントプレート155aの第1摩擦板241と対向配置される第2摩擦板242を備える。ナット220の下側には第1摩擦板241を第2摩擦板242に所定圧力で押圧するための皿バネ243が配置される。ナット220が締められることで皿バネ243を介して第1、第2摩擦板241、242が互いに所定圧力で当接し、ジョイントプレート155aがメインシャフト157に対して回動する際に摩擦力が形成される。
第2摩擦板242に対する第1摩擦板241の押圧力の調節はナット220の締弛によって行うことができ、このナット220を締める/弛めることにより、形成される摩擦力を調節することができる。摩擦力の調節範囲は特に制限しないが、例えば、0.3〜0.7kg・mのトルクに相当する摩擦力が形成されるように、ナット220を回して摩擦力を調節することが好ましい。
アーム155の回動範囲は特に制限しないが、例えばアーム155を片側に、5〜50度、例えば5度、10度、15度、20度、25度、30度、35度、40度、45度、50度など回動させてよく、アーム155の回動角度を調節することで患者の脚の折り畳み角度を調節することができる。
【0026】
次に本発明の作用について説明する。
まず、静脈血栓症予防を目的として下肢に運動が必要な患者のため、運動装置150は寝具170の寝台171上に取り付けられる(図14)。運動装置150の取り付けは、例えば運動装置150の基盤159に設けられたベルト164を寝具170に巻きつけてバックル167、168で留めることにより固定することができる。このとき、運動装置150の取り付け位置は患者の背丈に合わせて適宜調節するとよく、さらに、メインシャフト157を患者の正中矢状面辺りに合わせることが好ましい。
【0027】
運動装置150の固定後、寝台171上ホルダ152、153に患者の足を嵌め込み固定する。各ホルダ152、153に左足および右足を固定する際は、患者の左足と右脚との間隔に応じて、各ホルダ152、153がメインシャフト157に対して略軸対称に配置されるようにホルダアジャスタ161、162の固定位置を調節することができる。患者の正中矢状面に合わせられたメインシャフト157に対して各ホルダ152、153を軸対称に配置することで、左右対称に運動を実施することができ、バランスのよい運動を実施することができる。
【0028】
患者の左足、右足がそれぞれホルダ152、153に固定された後、患者の下肢の運動が開始される。下肢の運動は自己の筋力のみで自律的に行うことが好ましい。人工股関節全置換術や人工膝関節全置換術などの術後は、筋力が著しく低下している、股関節/膝関節が固い、さらに麻痺を有するなどの理由により自力で十分に動かせない場合では、患者は自分のできる範囲で脚を動かせばよい。また、患者が自力で足を動かす際に理学療法士や介護人などのヘルパーが下肢の運動をサポートすることも可能である。
各ホルダが垂直方向Zに沿って移動することにより、患者の足、脛部、膝、大腿部、臀部など脚部全体が動作する。アーム155の動きにはトルクが付与されるため、これによりそれぞれのホルダ152、153は患者に負荷をかけることができる。
【0029】
また、患者が自律的に運動を行うことで静脈血栓症の発症を防ぐことができる。そして、患者の脚の動きに対してトルクが働き、これにより下肢に負荷をかけることが可能となりアイソトニックトレーニングを実施することができる。このアイソトニックトレーニングによりリハビリの効果が期待できる。例えば、患者の下肢の筋力を回復することができ、よりスムーズに実際の歩行訓練に移行することができる。
以上のように、本発明の運動装置150は、患者の足を保持する各ホルダ152、153の動きによって患者の脚部を運動させ、静脈血栓症の発症を防ぐことができる。また、下肢を自力である程度動かせるようになった後には、リハビリ用の運動装置として使用することができる。さらに、血栓の形成を予防するための薬剤の投与が不要になることが期待でき、入院期間の短縮や医療費の削減、合併症の低減なども期待できる。
上記では、垂直方向Zに沿ってホルダ152、153が移動したが、運動装置に図2や図4さらに図6〜図9のいずれかで例示したような構造を組み込んでもよい。例えば、図9で例示した構造を運動装置に組み込んだ場合、股関節や膝関節の使われ方や脚部筋肉の使用部位が上述した運動装置150を使用した場合と異なるため、患者に興趣の異なる運動を提供することができる。
【0030】
上記の実施形態では、第1、第2摩擦板241、242を用いてホルダの動きに抗する抵抗力を形成したが、抵抗力の形成方法はこれに限らず、他の方法を用いてもよい。
例えば、電磁駆動式のアクチュエータを用いてホルダの動きに抗する抵抗力を形成することもできる。このようなアクチュエータを用いることにより抵抗力の調節を容易に行うことができる。
例えば、血栓症の予防を目的に下肢を動作させる場合には、抵抗力が最も弱くなるようにアクチュエータを設定し、自力で下肢を動かせるようになってからはアクチュエータが発揮する抵抗力を段階的に強める。このようにして下肢をリハビリすることで、血栓症の予防だけでなく患者の下肢に徐々に負荷を与えてトレーニングすることができる。これにより患者の下肢の筋力回復がある程度期待でき、より利便性の高い運動装置を提供することができる。
【符号の説明】
【0031】
2、10、30、50、70、90、110 運動装置
3、16、35、53、77、100、114 左ホルダ
4、17、36、54、78、101、115 右ホルダ
6 アーム
8 マウント
32、33ピストン機構
112 クランクシャフト
120 軸受け
150 運動装置
152 左ホルダ
153 右ホルダ
155 アーム
155a ジョイントプレート
157 メインシャフト
159 基盤
159a 基盤面
161、162 ホルダアジャスタ
161a、162a 挟持片
161b、162b ロックスクリュー
164 ベルト
167、168 バックル
170 寝具
171 寝台
174 フレーム
201、202 足受け部
205、206 踵ガイド部
209、210 拘束帯
213、214 丘状部
220 ナット
231、232 ロッドエンドベアリング
241 第1摩擦板
242 第2摩擦板
【特許請求の範囲】
【請求項1】
患者の足を保持するホルダと、前記ホルダを移動可能に保持する移動制御機構とを備えたことを特徴とする運動装置。
【請求項2】
前記移動制御機構が、
患者の一方の足側から他方の足側へ向かう左右方向成分と、
爪先側および踵側の一方から他方に向かう前後方向成分と、
前記左右方向成分と前記前後方向成分とに略垂直な垂直方向成分と、
のうちの少なくともいずれか1つの方向成分を有する方向に前記ホルダを移動可能に保持することを特徴とする請求項1に記載の運動装置。
【請求項3】
前記移動制御機構が、左ホルダの移動および右ホルダの移動を同調させることを特徴とする請求項2に記載の運動装置。
【請求項4】
前記移動制御機構が、前記ホルダの動きに抗する抵抗力を付与することを特徴とする請求項1〜3のいずれか1項に記載の運動装置。
【請求項5】
前記移動制御機構が、前記ホルダを緩徐に移動させるための速度調節手段を備えたことを特徴とする請求項1〜3のいずれか1項に記載の運動装置。
【請求項6】
前記ホルダが、足底弓に嵌合する丘状部を有することを特徴とする請求項1〜5のいずれか1項に記載の運動装置。
【請求項7】
前記移動制御機構を患者の寝台上に着脱自在に固定する固定具を備えたことを特徴とする請求項1〜6のいずれか1項に記載の運動装置。
【請求項8】
患者の正中矢状面に合わせられる基準を有し、
前記移動制御機構が、前記基準を中心として、前記左ホルダと前記右ホルダとを移動させることを特徴とする請求項1〜7のいずれか1項に記載の運動装置。
【請求項9】
請求項1〜8のいずれか1項に記載の運動装置を備えたことを特徴とする寝具。
【請求項1】
患者の足を保持するホルダと、前記ホルダを移動可能に保持する移動制御機構とを備えたことを特徴とする運動装置。
【請求項2】
前記移動制御機構が、
患者の一方の足側から他方の足側へ向かう左右方向成分と、
爪先側および踵側の一方から他方に向かう前後方向成分と、
前記左右方向成分と前記前後方向成分とに略垂直な垂直方向成分と、
のうちの少なくともいずれか1つの方向成分を有する方向に前記ホルダを移動可能に保持することを特徴とする請求項1に記載の運動装置。
【請求項3】
前記移動制御機構が、左ホルダの移動および右ホルダの移動を同調させることを特徴とする請求項2に記載の運動装置。
【請求項4】
前記移動制御機構が、前記ホルダの動きに抗する抵抗力を付与することを特徴とする請求項1〜3のいずれか1項に記載の運動装置。
【請求項5】
前記移動制御機構が、前記ホルダを緩徐に移動させるための速度調節手段を備えたことを特徴とする請求項1〜3のいずれか1項に記載の運動装置。
【請求項6】
前記ホルダが、足底弓に嵌合する丘状部を有することを特徴とする請求項1〜5のいずれか1項に記載の運動装置。
【請求項7】
前記移動制御機構を患者の寝台上に着脱自在に固定する固定具を備えたことを特徴とする請求項1〜6のいずれか1項に記載の運動装置。
【請求項8】
患者の正中矢状面に合わせられる基準を有し、
前記移動制御機構が、前記基準を中心として、前記左ホルダと前記右ホルダとを移動させることを特徴とする請求項1〜7のいずれか1項に記載の運動装置。
【請求項9】
請求項1〜8のいずれか1項に記載の運動装置を備えたことを特徴とする寝具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−34755(P2013−34755A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−174833(P2011−174833)
【出願日】平成23年8月10日(2011.8.10)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月10日(2011.8.10)
【出願人】(504171134)国立大学法人 筑波大学 (510)
[ Back to top ]