
運搬用車両
【課題】運搬用車両は、車両の後部に設置したステップにおいて、乗り心地と収納性とを両立する。
【解決手段】運搬用車両10は、車体フレーム20の端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構90を備えている。ステップ機構90は、車体フレーム20から第1方向へスライド可能に支持された可動支持板91と、可動支持板91に重ねられた可動展開板95と、可動支持板91および可動展開板95がスライドする動作をガイドするガイド機構100とを備えている。ガイド機構100は、可動支持板91に第1方向へ引き出す力を加えることで車体フレーム20の端部から引き出されたときに、可動展開板95が第1方向と交差する第2方向に積載面を拡張するように展開する。
【解決手段】運搬用車両10は、車体フレーム20の端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構90を備えている。ステップ機構90は、車体フレーム20から第1方向へスライド可能に支持された可動支持板91と、可動支持板91に重ねられた可動展開板95と、可動支持板91および可動展開板95がスライドする動作をガイドするガイド機構100とを備えている。ガイド機構100は、可動支持板91に第1方向へ引き出す力を加えることで車体フレーム20の端部から引き出されたときに、可動展開板95が第1方向と交差する第2方向に積載面を拡張するように展開する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、建物内やその周りの敷地内で荷物を運搬するのに適した運搬用車両に関し、詳しくは、車体フレームの後部に設置されたステップ機構を備えた運搬用車両に関する。
【背景技術】
【0002】
従来、この種の運搬用車両として、車両の後部から拡張したステップに人が乗って、ハンドルで操作する電動車椅子が知られている(特許文献1)。ステップは、電動車椅子の後部に回動可能に装着されており、使用時に水平方向に展開し、未使用時に電動車椅子の後部に合わさって収納されるように構成されている。
【0003】
しかし、従来の電動車椅子では、その後部で展開されたステップを大きくすると、収納に困り、また、ステップを小さくすると快適な乗り心地を得られないという課題があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開平1−178019
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の技術の問題点を解決することを踏まえ、車両の後部に設置したステップにおいて、乗り心地と収納性とを両立した運搬用車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0007】
[適用例1]
適用例1は、積載物を載置する積載面を有する車体フレームの端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構を備えた運搬用車両において、
上記ステップ機構は、上記車体フレームに重なって配置されている複数の可動展開板と、該可動展開板を上記車体フレームと平行である第1方向にスライドさせるとともに該可動展開板を上記第1方向と交差する第2方向へスライドさせることで上記可動展開板を収納または展開するようにガイドするガイド機構と
を備え、
上記ガイド機構は、上記複数の可動展開板を収納するときに該可動展開板の互いの距離を狭め、上記複数の可動展開板を展開するときに該可動展開板の互いの距離を広げるように構成した運搬用車両である。
【0008】
適用例1の運搬用車両10において、積載物を載置する車体フレームの端部には、積載物を乗せる面積を拡張するステップ機構が設けられている。ステップ機構は、車体フレームの後部に、第1方向へスライド可能に支持された可動展開板を備え、ガイド機構によりスライドされる。ガイド機構は、可動展開板を第1方向へスライドさせるとともに第1方向と交差する第2方向に積載面を拡張するように展開させる。すなわち、可動展開板は、第1方向だけでなく、第2方向へも広がり、積載面を広くするから、面倒な作業を必要とせず、使い勝手がよい。しかも、可動展開板は、展開された状態から、第2方向へコンパクトに収納することができる。
【0009】
[適用例2]
適用例2において、上記ガイド機構は、上記車体フレームに上記可動展開板を連携して倣うように形成されたガイド溝および軸突起を有するガイド部を備え、上記可動展開板が上記ガイド部にガイドされることで、上記可動展開板が上記第2方向へ展開または収納されるように構成されている。
【0010】
[適用例3]
適用例3において、上記ステップ機構は、上記車体フレームから上記第1方向へスライド可能に支持された可動支持板を有し、上記ガイド機構は、上記可動展開板を上記可動支持板に回動可能に軸支する軸支部と、上記可動展開板が上記ガイド部にガイドされることで、上記可動展開板が上記軸支部を中心に回動して上記第2方向へ展開または収納されるように構成されている。この構成により、ステップ機構は、ガイド機構により可動支持板が第1方向へスライドするときに、可動展開板が可動支持板に連動して、第1方向と交差する第2方向に積載面を拡張するように展開されるから、より使い勝手がよい。
【0011】
[適用例4]
適用例4において、上記ガイド機構は、上記可動支持板を上記車体フレームに位置決めする位置決め機構を有する構成をとることができる。このガイド機構の構成により、可動支持板および可動展開板は、車体フレームから不用意に引き出され、また収納されることがない。
【図面の簡単な説明】
【0012】
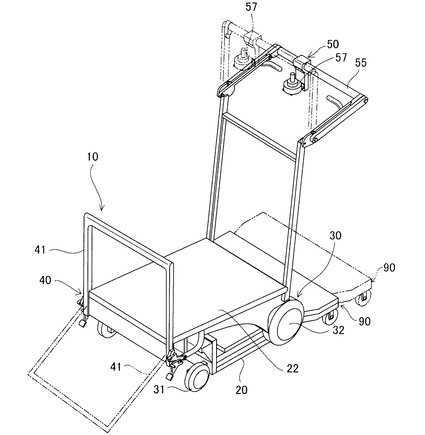
【図1】本発明の一実施例にかかる運搬用車両を示す斜視図である。
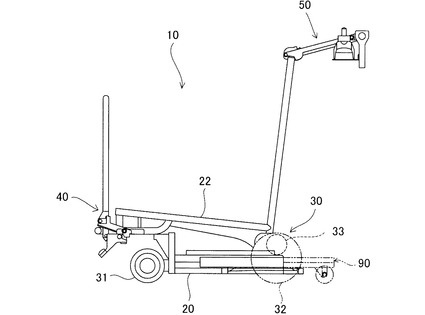
【図2】運搬用車両の側面図である。
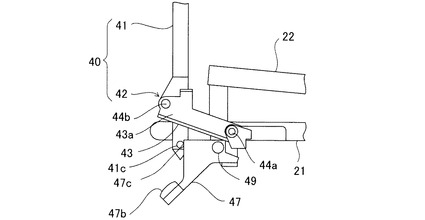
【図3】運搬用車両の前方のフレーム機構の付近を示す側面図である。
【図4】フレーム機構を分解した斜視図である。
【図5】フレーム機構の動作を説明する説明図である。
【図6】図5に続く動作を説明する説明図である。
【図7】フレーム機構の動作を説明する説明図である。
【図8】ハンドル機構の折り畳み状態(第1操作位置)を示す説明図である。
【図9】ハンドル機構の展開状態(第2操作位置)を示す説明図である。
【図10】図9の矢印F10の方向から見た図である。
【図11】ハンドル機構を分解した斜視図である。
【図12】ハンドル機構の動作を説明する説明図である。
【図13】ハンドル機構の動作を説明する説明図である。
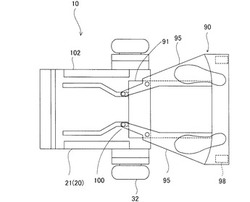
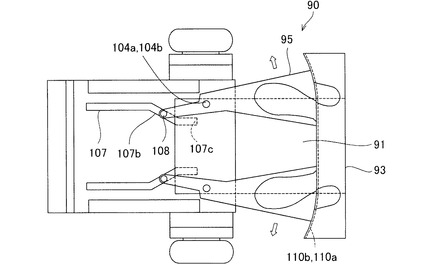
【図14】運搬用車両の後部のステップ機構を説明する平面図である。
【図15】図14の側面図である。
【図16】ステップ機構の各部品を分解した斜視図である。
【図17】ステップ機構の動作を説明する説明図である。
【図18】図17に続く動作を説明する説明図である。
【図19】図18に続く動作を説明する説明図である。
【図20】図17のステップ機構を上方から見た説明図である。
【図21】図19のステップ機構を上方から見た説明図である。
【発明を実施するための形態】
【0013】
以下、本発明にかかる車両を運搬用車両10に適用した実施例を図面にしたがって説明する。
(1) 運搬用車両10の概略構成
図1は本発明の一実施例にかかる運搬用車両10を示す斜視図、図2は運搬用車両10の側面図である。運搬用車両10は、モータ式の後輪駆動の荷物運搬車であり、車体フレーム20と、動力を与えるための駆動装置30と、車体フレーム20の前方に配置されたフレーム機構40と、ハンドル機構50と、ステップ機構90とを備え、人が後部に乗って運転する自走モードと、人が押すとともにモータで駆動力を補助するアシストモードとの2つのモードにより使用可能な車両である。
【0014】
(2) 運搬用車両10の各部の構成および動作
車体フレーム20は、運搬用車両10を支持するための枠体であり、その上部に積載部22を備えている。積載部22は、荷物を載せたときに、荷物が前方に倒れないように、前方から後方に向けて、後方側が低くなるように傾斜している。
【0015】
駆動装置30は、車体フレーム20に車軸を介して支持された前輪31および後輪32と、後輪32を駆動するモータ(図2)と、図示しないバッテリおよび電子制御装置とを備えており、ハンドル機構50からの指令により電子制御装置を介して、バッテリの電力でモータ33を駆動することにより、運搬用車両10を走行駆動する。
【0016】
(2)−1 フレーム機構40
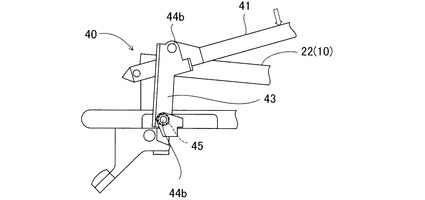
図3は運搬用車両10の前方のフレーム機構40の付近を示す側面図、図4はフレーム機構40を分解した斜視図である。図3において、フレーム機構40は、支持枠体41と、起立傾倒機構42とを備えている。支持枠体41は、車両の前方にU字形に配置された棒状部材であり、積載部22から積載物の脱落を防止するためのものである(図1参照)。起立傾倒機構42は、車体基板21に支持枠体41を回動可能に支持しており、すなわち、支持枠体41を車体基板21に対して起立した起立姿勢に設定し、支持枠体41を積載部22側へ傾けた第1傾倒姿勢および積載部22の反対側へ傾けた第2傾倒姿勢に設定するものである。
【0017】
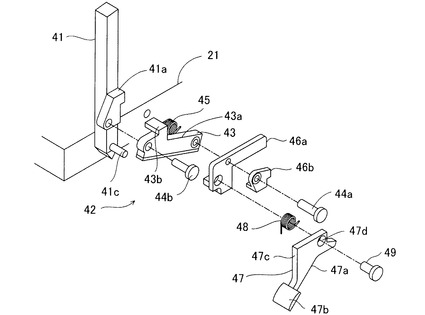
図4において、起立傾倒機構42は、回動部材43と、スプリング45と、固定部材46a,46bと、ロック部材47と、ロック部材47を元の位置に戻すための復帰用のスプリング48とを備えている。回動部材43は、車体基板21に第1軸44aを介して回動可能に支持されるとともに、車体基板21に固定部材46a,46bにより図3の状態から車両の前方に回転しないように回り止めされている。また、回動部材43は、スプリング45により車両の前方方向へ付勢されている。さらに、回動部材43は、支持枠体41を第2軸44bを介して回転可能に支持している。回動部材43は、規制部43bを備え、支持枠体41の規制部材41aに当たることにより、支持枠体41の車両後方への回動を規制している。ロック部材47は、ロック本体47aと、ロック本体47aの一端に一体形成されたペダル47bとを備えている。ロック本体47aは、支持枠体41の被ロック部材41cに係合するロック部47cを備え、軸孔47dに挿通された軸体49を介して車体基板21に回動可能に支持されている。
【0018】
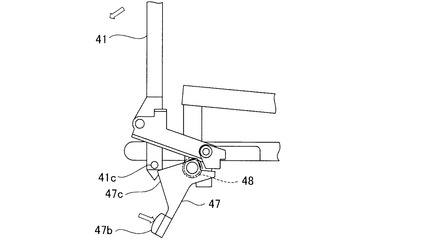
図5ないし図7はフレーム機構40の動作を説明する説明図である。荷物を運搬用車両10の前方から積載部22に荷物を乗せるには、フレーム機構40に対して、以下の操作を行なう。図5に示すように、ペダル47bを踏むと、ロック部材47がスプリング48のスプリング力に抗して回動して、ロック部47cが支持枠体41の被ロック部材41cから退避して、ロック位置が解除される。そして、図6に示すように、支持枠体41に前方に倒す力を加えると、支持枠体41が第2軸44bを中心に回動する。支持枠体41は、その上端が床面に当った位置で停止する(第2傾倒姿勢)。そして、床面にある荷物を支持枠体41に乗せてスライドさせることで、積載部22へ乗せることができる。このとき、ロック部材47は、スプリング48のスプリング力を受けて回動して元の位置に戻る。
【0019】
支持枠体41を元の起立姿勢に戻すには、支持枠体41の先端を持って引きあげると、支持枠体41が第2軸44bを中心に回動する。被ロック部材41cが、スプリング48で元の位置に戻っていたロック部材47に当たってロック部材47を一時的に回動させ、ロック部47cと係合することでロック位置に移行する。これにより、支持枠体41は、起立姿勢となり、積載部22の上から前方に投げ出されないように規制する。
【0020】
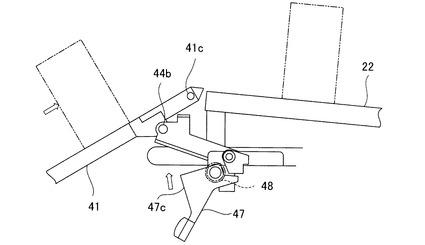
図7に示すように、運搬用車両10の積載部22に荷物が載せられていない状態で、フレーム機構40の支持枠体41は、積載部22側へ倒すことができる。すなわち、支持枠体41に後方への力を加えると、支持枠体41は、スプリング45のスプリング力に抗して、回動部材43の第2軸44bを中心に回動して倒すことができる(第1傾倒姿勢)。よって、運搬用車両10は、支持枠体41を倒して、狭い駐車スペースに収納することができる。なお、支持枠体41は、スプリング45の付勢力に起立姿勢へ戻る方向へ力が加えられているが、収納動作に支障がなく、収納した後に、速やかに元の起立姿勢に戻ることができる。
【0021】
(2)−2 ハンドル機構50の構成および動作
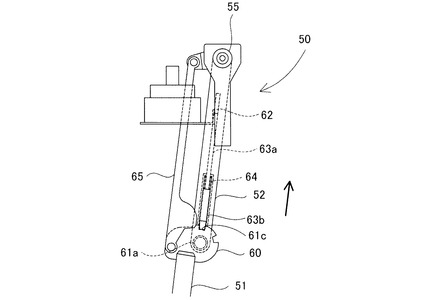
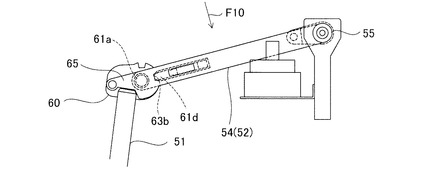
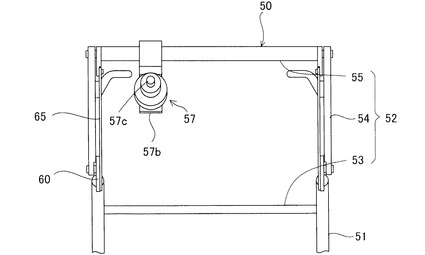
図8および図9はハンドル機構50を示す側面図であり、図8はハンドル機構50の折り畳み状態(第1操作位置)を示し、図9はハンドル機構50の展開状態(第2操作位置)を示す。図10は図9の矢印F10の方向から見た図、図11はハンドル機構50を分解した斜視図である。図10において、ハンドル機構50は、支持基材51の上部に装着されたハンドル本体52と、操作機構57と、ハンドル支持機構60と、操作位置維持機構65とを備えている。ハンドル本体52は、支持基材51の上端部に掛け渡された連結部材53と、支持基材51の上部にハンドル支持機構60を介して回動可能に支持された連結部材54と、連結部材54の上部に回動可能に装着された把持部55とを備え、これらで矩形の枠体を構成している。把持部55は、運転の際に人の手で握られる部材である。操作機構57は、操作支持台57aと、操作連結部材57bと、操作部57cとを備え、把持部55に操作連結部材57bを介して固定されている。操作部57cは、例えば、ジョイスティックから構成され、前後左右に操作することにより、運搬用車両10を前進、後退、停止、右折、左折を行なうことができる。
【0022】
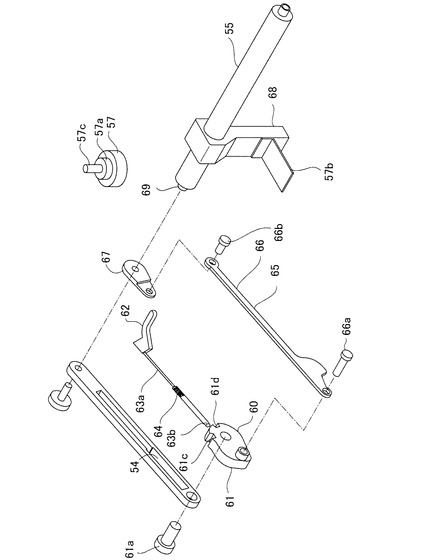
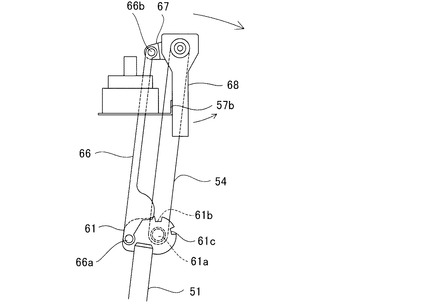
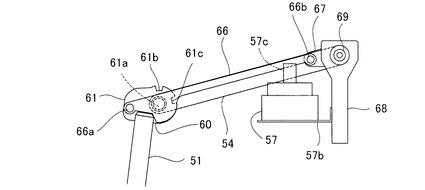
図8および図9に示すように、ハンドル支持機構60は、支持基材51の上部に固定されており、ハンドル本体52を2段階の角度で第1操作位置(図8)と第2操作位置(図9)とに選択的に固定できる機構である。図11において、ハンドル支持機構60は、回動固定部材61を備えている。回動固定部材61は、支持基材51の上部に固定された楕円状の部材であり、軸体61aで連結部材54を回転可能に支持している。また、回動固定部材61は、その外周上部に連結部材54の角度を定めるために、第1係合凹所61cおよび第2係合凹所61dが形成されている。また、ハンドル支持機構60は、レバー62と、レバー62の端部に固定されたレバー連結棒63aと、レバー連結棒63aの先端に固定された係合部材63bと、スプリング64とを備えている。図8に示すように、係合部材63bが第1係合凹所61cに係合していると、第1操作位置になる。そして、レバー62および把持部55に手をかけてレバー62を握ると、レバー62と一体のレバー連結棒63a、係合部材63bが矢印方向へ移動し、係合部材63bが第1係合凹所61cから抜ける。そして、図9に示すように、連結部材54を軸体61aを中心に回動して、係合部材63bが第2係合凹所61dに対向した位置にて、スプリング64のスプリング力にて係合部材63bが第2係合凹所61dに突入して係合することにより、ハンドル本体52が第2操作位置に移行する。
【0023】
図11において、操作位置維持機構65は、ハンドル機構50が図8の第1操作位置または図9の第2操作位置にかかわらず、操作機構57の操作姿勢を維持するための機構である。操作位置維持機構65は、リンク部材66と、回動片67と、支持基板68と、軸体69とを備える。リンク部材66は、回動固定部材61と回動片67とをリンクする長尺の部材であり、軸体66aを介して回動固定部材61に、軸体66bを介して回動片67に連結している。回動片67は、軸体69を介して支持基板68に一体に連結されている。支持基板68は、操作連結部材57bを介して操作機構57を固定している。
【0024】
次に、ハンドル機構50の第1操作位置と第2操作位置との切替動作について説明する。図8のハンドル機構50の第1操作位置から、レバー62を握って、係合部材63bを第1係合凹所61cから外して、軸体61aを中心に連結部材54を回動する。このとき、図12に示すように、操作位置維持機構65のリンク部材66は、軸体66aを中心に回動するとともに、軸体66bを介して回動片67も回動させる。回動片67には、支持基板68が一体に形成されているので、支持基板68も図示の反時計方向へ回動する。そして、図9に示すように、係合部材63bが第2係合凹所61dに係合することにより、ハンドル機構50が第2操作位置に固定される。このとき、図13に示すように、操作機構57は、支持基板68と一体に反時計方向へ回動することにより、その操作部57cを上方に向くように姿勢が維持される。
【0025】
(2)−3 ステップ機構90の構成および動作
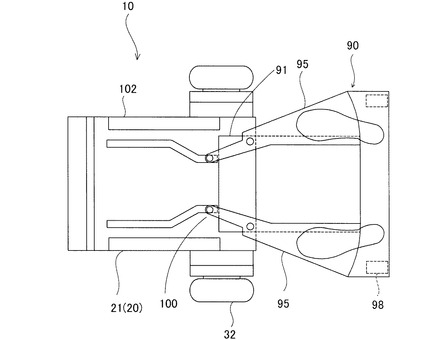
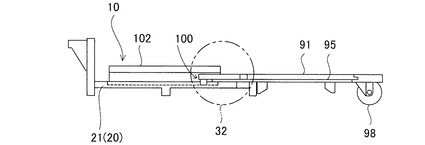
図14は運搬用車両10の後部のステップ機構90を説明する平面図、図15は図14の側面図である。ステップ機構90は、車体フレーム20の車体基板21上にスライド可能に設けられており、可動支持板91と、可動展開板95と、可動展開板95の後部下面に装着された補助輪98と、ガイド機構100とを備えている。図16はステップ機構90の各部品を分解した斜視図である。可動支持板91は、第1可動板本体92と、第1可動板本体92の後部に一体形成された後支持板93とを備えている。第1可動板本体92はほぼ矩形である。後支持板93は、可動支持板91の後部から車幅と同じ位置まで幅方向に拡張して形成されている。可動展開板95は、可動支持板91上にスライド可能に載置されており、ほぼ三角形の部材である第2可動板本体96を備えている。可動展開板95は、車体基板21の前後方向の中心線の両側に、同一形状で2つ配置することにより構成されている。
【0026】
ガイド機構100は、可動支持板91の第2方向への動きに連動して、可動展開板95を幅方向(第2方向)に展開・収納するためのガイドする機構である。ガイド機構100は、スライド支持部102と、軸支部104と、溝ガイド部106と、回動ガイド部110と、位置決め部112とを備えている。スライド支持部102は、車体基板21の両側に形成されており、可動支持板91の両側を押さえることで車体フレーム20とほぼ同一な面上で第1方向(前後方向)にスライド可能に支持する部材である。
軸支部104は、可動支持板91に突設された軸突部104aと、可動展開板95に形成された軸孔104bとを備えており、軸突部104aを中心に可動展開板95を回動可能に支持している。
溝ガイド部106は、車体基板21に形成されたガイド溝107と、可動展開板95の前端に下方に突設されガイド溝107に倣う軸突起108とを備えている。ガイド溝107は、前側直進部107aと、傾斜部107bと、後側直進部107cとを備え、これらを連続して形成している。
回動ガイド部110は、可動支持板91の後支持板93の前縁に沿って形成されたガイド溝110aと、可動展開板95の後部に円弧状に形成されガイド溝110aに嵌合してスライドするガイド突条110bとを備えている。
位置決め部112は、可動支持板91の下面に形成された前側位置決め突起113aおよび後側位置決め突起113bと、車体基板21に形成された第1本体側位置決め突起114aおよび第2本体側位置決め突起114bとを備えている。
【0027】
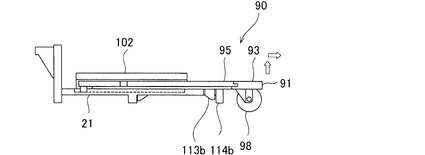
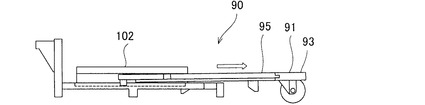
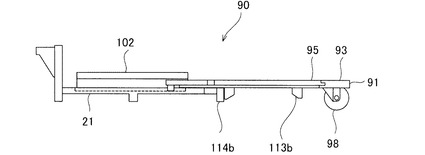
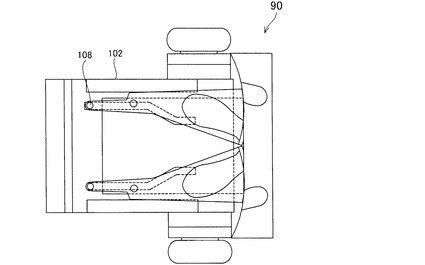
図17ないし図21はステップ機構90の可動支持板91および可動展開板95が収納されている収納位置から、可動支持板91および可動展開板95を引き出した拡張位置まで、可動支持板91および可動展開板95を操作する一連の動作を説明する説明図である。ここで、図17ないし図19はステップ機構90を側面から見た図である。図20は図17のステップ機構90を、図21は図19のステップ機構90をそれぞれ上方から見た図である。図17および図20において、可動支持板91および可動展開板95を収納一から拡張位置まで引き出すには、可動支持板91の後支持板93を持ち上げて引き出す。これにより、可動支持板91の後側位置決め突起113bが車体基板21の第2本体側位置決め突起114bから外れる。そして、図18に示すように、後支持板93をもって可動支持板91を引き出すと、可動支持板91は、車体基板21のスライド支持部102にガイドされて移動する。このとき、図16に示すように、可動支持板91の上に載置された可動展開板95は、可動展開板95の軸孔104bが可動支持板91の軸突部104aで軸支持されているから、図21に示すように、この軸支持箇所を中心に回動しつつ、軸突起108がガイド溝107の傾斜部107bにガイドされる。可動展開板95は、軸突起108がガイド溝107の傾斜部107bを倣うときに、可動展開板95の後部が幅方向の外方へ拡がる。また、可動展開板95のガイド突条110bがガイド溝110aにガイドされ、可動展開板95のスムーズな回動が行なわれる。そして、軸突起108がガイド溝107の後側直進部107cの終端までガイドされると、可動展開板95の外側端部は、後支持板93の外側端に達する。そして、図19に示すように、持ち上げている可動支持板91を下げると、前側位置決め突起113aが第2本体側位置決め突起114bに位置決めされ、軸突起108がガイド溝107の後端に位置決めされることにより、可動支持板91の前後方向への移動が規制される。
【0028】
ステップ機構90の可動支持板91および可動展開板95を収納するには、上述と逆の動作、つまり図19から図17への動作を行なう。可動支持板91の後支持板93の端部を持ち上げて、前側位置決め突起113aが第2本体側位置決め突起114bに位置決めされているロック状態を解除する。続いて、後支持板93の箇所を押し込んで可動支持板91を移動すると、可動支持板91の移動とともに可動展開板95が軸孔104bおよび軸突部104aの軸支持箇所を中心に回動する。これにより、可動展開板95が幅方向の内方へ移動して、それらの間隔が狭くなる。可動展開板95が可動支持板91上で狭まって収納されるとともに、可動支持板91も車体基板21上に合わさるように収納される。
【0029】
(3) 実施例の効果
(3)−1 運搬用車両10は、自走モードおよびアシストモードの2つのモードで運転することができる。すなわち、図1において、自走モードで運転するには、ステップ機構90を拡張位置(2点鎖線)に設定するとともに、ハンドル機構50を第1操作位置(2点鎖線)に設定する。これにより、人が、ステップ機構90の上に乗って、ハンドル機構50の操作機構57を操作することにより、運搬用車両10の駆動力で運転することができる。一方、アシストモードで運転するには、ステップ機構90を収納位置(実線)に設定するとともに、ハンドル機構50を第2操作位置(実線)に設定する。これにより、人がフレーム機構40の把持部55を持って歩きながら運搬用車両10を押す。このとき、操作機構57を操作することにより、運搬用車両10の駆動力でアシストすることができる。
【0030】
(3)−2 図5ないし図7に示すように、運搬用車両10において、フレーム機構40の支持枠体41は、起立傾倒機構42の回動部材43により、車体フレーム20の端部に回動可能に支持されており、運搬用車両10の走行時や収納時、積載物を積載するときに対応するために、起立姿勢、第1傾倒姿勢および第2傾倒姿勢にそれぞれ設定することができる。すなわち、起立傾倒機構42は、ロック部材47をロック位置に設定すると、支持枠体41が起立姿勢に設定される。この起立姿勢では、支持枠体41がロック部材47により固定され、積載部22と反対側に、つまり運搬用車両の外側へ不用意に倒れることがない。
【0031】
(3)−3 起立傾倒機構42は、ロック部材47をロック位置に設定した状態にて、支持枠体41に積載部22側への力を加えると、回動部材43の第1軸44aを中心に回動して、積載部22側へ倒れる第1傾倒姿勢になる。この姿勢にて、支持枠体41は、積載部22側へコンパクトに収納することができる。
【0032】
(3)−4 起立傾倒機構42は、ロック部材47を非ロック位置に設定して、支持枠体41に積載部22と反対側への力を加えると、支持枠体41が第2軸44bを中心に回動して、第2傾倒姿勢になる。この姿勢にて、支持枠体41は、該支持枠体41上に積載物を乗せてスライドさせることで、積載物を積載部22へ容易に導くことができる。
【0033】
(3)−5 図8ないし図13に示すように、ハンドル機構50において、ハンドル本体52は、支持基材51との間でハンドル支持機構60の軸体61aを介して回動可能に支持されており、図12および図13に示すように、支持基材51に対する角度の違いにより、第1操作位置と第2操作位置とに設定することができる。このとき、ハンドル本体52は、第1操作位置または第2操作位置に切り替えても、図10に示すように操作機構57がハンドル本体52で囲まれた領域に配置されるから、人が把持部55を手で握ったときに、体の他の部分で操作部57cに接触することがなく、誤操作を生じ難い。しかも、図12および図13に示すように、ハンドル本体52を第1操作位置または第2操作位置に切り替えても、操作位置維持機構65は、リンク部材66が操作機構57を回動させて、操作部57cを同一の方向(上方)に向くように配置するから、操作機構57の操作性に優れている。
【0034】
(3)−6 図14ないし図21に示すように、ステップ機構90は、車体フレーム20の後部に、第1方向へスライド可能に支持された可動支持板91および可動展開板95を備え、ガイド機構100によりスライドさせる。ガイド機構100は、可動支持板91が第1方向へスライドするときに、可動展開板95が可動支持板91に連動して、第1方向と交差しかつ第1方向とほぼ同一の面上にて第2方向に積載面を拡張するように展開される。すなわち、可動展開板95は、可動支持板91に連動して、第1方向だけでなく、第2方向へも広がり、積載面を広くするから、面倒な作業を必要とせず、使い勝手がよい。しかも、可動展開板95は、展開された状態から、第2方向へコンパクトに収納することができる。
【0035】
なお、この発明は上記実施例に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。
(a) 上記実施例では、積載部22に積載される積載物は、荷物の場合について説明したが、これに限らず、車体フレーム20に固定された椅子を搭載している場合には人であってもよく、また、車椅子などであってもよい。
(b) 上記支持枠体41の第2傾倒姿勢は、荷物を積載部22に導くために好適な傾きであればよく、支持枠体41の上端が床面に付く位置まで傾くほか、水平方向などであってもよい。
(c) 上記実施例では、可動展開板95は、可動展開板95にスライド可能に設けたが、これに限らず、第2可動板が第1可動板に連動して第2方向へ展開される構成であれば、車体フレーム上に第2可動板がスライド可能に載置される構成であってもよい。
(d) また、上記実施例では、駆動源としてモータを用いたが、これに限らず、小型のエンジンなどであってもよい。
【符号の説明】
【0036】
10…運搬用車両
20…車体フレーム
21…車体基板
22…積載部
30…駆動装置
31…前輪
32…後輪
33…モータ
40…フレーム機構
41…支持枠体
41a…規制部材
41c…被ロック部材
42…起立傾倒機構
43…回動部材
43b…規制部
44a…第1軸
44b…第2軸
45…スプリング
46a,46b…固定部材
47…ロック部材
47a…ロック本体
47b…ペダル
47c…ロック部
47d…軸孔
48…スプリング
49…軸体
50…ハンドル機構
51…支持基材
52…ハンドル本体
53…連結部材
54…連結部材
55…把持部
57…操作機構
57a…操作支持台
57b…操作連結部材
57c…操作部
60…ハンドル支持機構
61…回動固定部材
61a…軸体
61c…第1係合凹所
61d…第2係合凹所
62…レバー
63a…レバー連結棒
63b…係合部材
64…スプリング
65…操作位置維持機構
66…リンク部材
66a…軸体
66b…軸体
67…回動片
68…支持基板
69…軸体
90…ステップ機構
91…可動支持板
92…第1可動板本体
93…後支持板
95…可動展開板
96…第2可動板本体
98…補助輪
100…ガイド機構
102…スライド支持部
104…軸支部
104a…軸突部
104b…軸孔
106…溝ガイド部
107…ガイド溝
107a…前側直進部
107b…傾斜部
107c…後側直進部
108…軸突起
110…回動ガイド部
110a…ガイド溝
110b…ガイド突条
112…位置決め部
113a…前側位置決め突起
113b…後側位置決め突起
114a…第1本体側位置決め突起
114b…第2本体側位置決め突起
【技術分野】
【0001】
本発明は、建物内やその周りの敷地内で荷物を運搬するのに適した運搬用車両に関し、詳しくは、車体フレームの後部に設置されたステップ機構を備えた運搬用車両に関する。
【背景技術】
【0002】
従来、この種の運搬用車両として、車両の後部から拡張したステップに人が乗って、ハンドルで操作する電動車椅子が知られている(特許文献1)。ステップは、電動車椅子の後部に回動可能に装着されており、使用時に水平方向に展開し、未使用時に電動車椅子の後部に合わさって収納されるように構成されている。
【0003】
しかし、従来の電動車椅子では、その後部で展開されたステップを大きくすると、収納に困り、また、ステップを小さくすると快適な乗り心地を得られないという課題があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開平1−178019
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の技術の問題点を解決することを踏まえ、車両の後部に設置したステップにおいて、乗り心地と収納性とを両立した運搬用車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0007】
[適用例1]
適用例1は、積載物を載置する積載面を有する車体フレームの端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構を備えた運搬用車両において、
上記ステップ機構は、上記車体フレームに重なって配置されている複数の可動展開板と、該可動展開板を上記車体フレームと平行である第1方向にスライドさせるとともに該可動展開板を上記第1方向と交差する第2方向へスライドさせることで上記可動展開板を収納または展開するようにガイドするガイド機構と
を備え、
上記ガイド機構は、上記複数の可動展開板を収納するときに該可動展開板の互いの距離を狭め、上記複数の可動展開板を展開するときに該可動展開板の互いの距離を広げるように構成した運搬用車両である。
【0008】
適用例1の運搬用車両10において、積載物を載置する車体フレームの端部には、積載物を乗せる面積を拡張するステップ機構が設けられている。ステップ機構は、車体フレームの後部に、第1方向へスライド可能に支持された可動展開板を備え、ガイド機構によりスライドされる。ガイド機構は、可動展開板を第1方向へスライドさせるとともに第1方向と交差する第2方向に積載面を拡張するように展開させる。すなわち、可動展開板は、第1方向だけでなく、第2方向へも広がり、積載面を広くするから、面倒な作業を必要とせず、使い勝手がよい。しかも、可動展開板は、展開された状態から、第2方向へコンパクトに収納することができる。
【0009】
[適用例2]
適用例2において、上記ガイド機構は、上記車体フレームに上記可動展開板を連携して倣うように形成されたガイド溝および軸突起を有するガイド部を備え、上記可動展開板が上記ガイド部にガイドされることで、上記可動展開板が上記第2方向へ展開または収納されるように構成されている。
【0010】
[適用例3]
適用例3において、上記ステップ機構は、上記車体フレームから上記第1方向へスライド可能に支持された可動支持板を有し、上記ガイド機構は、上記可動展開板を上記可動支持板に回動可能に軸支する軸支部と、上記可動展開板が上記ガイド部にガイドされることで、上記可動展開板が上記軸支部を中心に回動して上記第2方向へ展開または収納されるように構成されている。この構成により、ステップ機構は、ガイド機構により可動支持板が第1方向へスライドするときに、可動展開板が可動支持板に連動して、第1方向と交差する第2方向に積載面を拡張するように展開されるから、より使い勝手がよい。
【0011】
[適用例4]
適用例4において、上記ガイド機構は、上記可動支持板を上記車体フレームに位置決めする位置決め機構を有する構成をとることができる。このガイド機構の構成により、可動支持板および可動展開板は、車体フレームから不用意に引き出され、また収納されることがない。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施例にかかる運搬用車両を示す斜視図である。
【図2】運搬用車両の側面図である。
【図3】運搬用車両の前方のフレーム機構の付近を示す側面図である。
【図4】フレーム機構を分解した斜視図である。
【図5】フレーム機構の動作を説明する説明図である。
【図6】図5に続く動作を説明する説明図である。
【図7】フレーム機構の動作を説明する説明図である。
【図8】ハンドル機構の折り畳み状態(第1操作位置)を示す説明図である。
【図9】ハンドル機構の展開状態(第2操作位置)を示す説明図である。
【図10】図9の矢印F10の方向から見た図である。
【図11】ハンドル機構を分解した斜視図である。
【図12】ハンドル機構の動作を説明する説明図である。
【図13】ハンドル機構の動作を説明する説明図である。
【図14】運搬用車両の後部のステップ機構を説明する平面図である。
【図15】図14の側面図である。
【図16】ステップ機構の各部品を分解した斜視図である。
【図17】ステップ機構の動作を説明する説明図である。
【図18】図17に続く動作を説明する説明図である。
【図19】図18に続く動作を説明する説明図である。
【図20】図17のステップ機構を上方から見た説明図である。
【図21】図19のステップ機構を上方から見た説明図である。
【発明を実施するための形態】
【0013】
以下、本発明にかかる車両を運搬用車両10に適用した実施例を図面にしたがって説明する。
(1) 運搬用車両10の概略構成
図1は本発明の一実施例にかかる運搬用車両10を示す斜視図、図2は運搬用車両10の側面図である。運搬用車両10は、モータ式の後輪駆動の荷物運搬車であり、車体フレーム20と、動力を与えるための駆動装置30と、車体フレーム20の前方に配置されたフレーム機構40と、ハンドル機構50と、ステップ機構90とを備え、人が後部に乗って運転する自走モードと、人が押すとともにモータで駆動力を補助するアシストモードとの2つのモードにより使用可能な車両である。
【0014】
(2) 運搬用車両10の各部の構成および動作
車体フレーム20は、運搬用車両10を支持するための枠体であり、その上部に積載部22を備えている。積載部22は、荷物を載せたときに、荷物が前方に倒れないように、前方から後方に向けて、後方側が低くなるように傾斜している。
【0015】
駆動装置30は、車体フレーム20に車軸を介して支持された前輪31および後輪32と、後輪32を駆動するモータ(図2)と、図示しないバッテリおよび電子制御装置とを備えており、ハンドル機構50からの指令により電子制御装置を介して、バッテリの電力でモータ33を駆動することにより、運搬用車両10を走行駆動する。
【0016】
(2)−1 フレーム機構40
図3は運搬用車両10の前方のフレーム機構40の付近を示す側面図、図4はフレーム機構40を分解した斜視図である。図3において、フレーム機構40は、支持枠体41と、起立傾倒機構42とを備えている。支持枠体41は、車両の前方にU字形に配置された棒状部材であり、積載部22から積載物の脱落を防止するためのものである(図1参照)。起立傾倒機構42は、車体基板21に支持枠体41を回動可能に支持しており、すなわち、支持枠体41を車体基板21に対して起立した起立姿勢に設定し、支持枠体41を積載部22側へ傾けた第1傾倒姿勢および積載部22の反対側へ傾けた第2傾倒姿勢に設定するものである。
【0017】
図4において、起立傾倒機構42は、回動部材43と、スプリング45と、固定部材46a,46bと、ロック部材47と、ロック部材47を元の位置に戻すための復帰用のスプリング48とを備えている。回動部材43は、車体基板21に第1軸44aを介して回動可能に支持されるとともに、車体基板21に固定部材46a,46bにより図3の状態から車両の前方に回転しないように回り止めされている。また、回動部材43は、スプリング45により車両の前方方向へ付勢されている。さらに、回動部材43は、支持枠体41を第2軸44bを介して回転可能に支持している。回動部材43は、規制部43bを備え、支持枠体41の規制部材41aに当たることにより、支持枠体41の車両後方への回動を規制している。ロック部材47は、ロック本体47aと、ロック本体47aの一端に一体形成されたペダル47bとを備えている。ロック本体47aは、支持枠体41の被ロック部材41cに係合するロック部47cを備え、軸孔47dに挿通された軸体49を介して車体基板21に回動可能に支持されている。
【0018】
図5ないし図7はフレーム機構40の動作を説明する説明図である。荷物を運搬用車両10の前方から積載部22に荷物を乗せるには、フレーム機構40に対して、以下の操作を行なう。図5に示すように、ペダル47bを踏むと、ロック部材47がスプリング48のスプリング力に抗して回動して、ロック部47cが支持枠体41の被ロック部材41cから退避して、ロック位置が解除される。そして、図6に示すように、支持枠体41に前方に倒す力を加えると、支持枠体41が第2軸44bを中心に回動する。支持枠体41は、その上端が床面に当った位置で停止する(第2傾倒姿勢)。そして、床面にある荷物を支持枠体41に乗せてスライドさせることで、積載部22へ乗せることができる。このとき、ロック部材47は、スプリング48のスプリング力を受けて回動して元の位置に戻る。
【0019】
支持枠体41を元の起立姿勢に戻すには、支持枠体41の先端を持って引きあげると、支持枠体41が第2軸44bを中心に回動する。被ロック部材41cが、スプリング48で元の位置に戻っていたロック部材47に当たってロック部材47を一時的に回動させ、ロック部47cと係合することでロック位置に移行する。これにより、支持枠体41は、起立姿勢となり、積載部22の上から前方に投げ出されないように規制する。
【0020】
図7に示すように、運搬用車両10の積載部22に荷物が載せられていない状態で、フレーム機構40の支持枠体41は、積載部22側へ倒すことができる。すなわち、支持枠体41に後方への力を加えると、支持枠体41は、スプリング45のスプリング力に抗して、回動部材43の第2軸44bを中心に回動して倒すことができる(第1傾倒姿勢)。よって、運搬用車両10は、支持枠体41を倒して、狭い駐車スペースに収納することができる。なお、支持枠体41は、スプリング45の付勢力に起立姿勢へ戻る方向へ力が加えられているが、収納動作に支障がなく、収納した後に、速やかに元の起立姿勢に戻ることができる。
【0021】
(2)−2 ハンドル機構50の構成および動作
図8および図9はハンドル機構50を示す側面図であり、図8はハンドル機構50の折り畳み状態(第1操作位置)を示し、図9はハンドル機構50の展開状態(第2操作位置)を示す。図10は図9の矢印F10の方向から見た図、図11はハンドル機構50を分解した斜視図である。図10において、ハンドル機構50は、支持基材51の上部に装着されたハンドル本体52と、操作機構57と、ハンドル支持機構60と、操作位置維持機構65とを備えている。ハンドル本体52は、支持基材51の上端部に掛け渡された連結部材53と、支持基材51の上部にハンドル支持機構60を介して回動可能に支持された連結部材54と、連結部材54の上部に回動可能に装着された把持部55とを備え、これらで矩形の枠体を構成している。把持部55は、運転の際に人の手で握られる部材である。操作機構57は、操作支持台57aと、操作連結部材57bと、操作部57cとを備え、把持部55に操作連結部材57bを介して固定されている。操作部57cは、例えば、ジョイスティックから構成され、前後左右に操作することにより、運搬用車両10を前進、後退、停止、右折、左折を行なうことができる。
【0022】
図8および図9に示すように、ハンドル支持機構60は、支持基材51の上部に固定されており、ハンドル本体52を2段階の角度で第1操作位置(図8)と第2操作位置(図9)とに選択的に固定できる機構である。図11において、ハンドル支持機構60は、回動固定部材61を備えている。回動固定部材61は、支持基材51の上部に固定された楕円状の部材であり、軸体61aで連結部材54を回転可能に支持している。また、回動固定部材61は、その外周上部に連結部材54の角度を定めるために、第1係合凹所61cおよび第2係合凹所61dが形成されている。また、ハンドル支持機構60は、レバー62と、レバー62の端部に固定されたレバー連結棒63aと、レバー連結棒63aの先端に固定された係合部材63bと、スプリング64とを備えている。図8に示すように、係合部材63bが第1係合凹所61cに係合していると、第1操作位置になる。そして、レバー62および把持部55に手をかけてレバー62を握ると、レバー62と一体のレバー連結棒63a、係合部材63bが矢印方向へ移動し、係合部材63bが第1係合凹所61cから抜ける。そして、図9に示すように、連結部材54を軸体61aを中心に回動して、係合部材63bが第2係合凹所61dに対向した位置にて、スプリング64のスプリング力にて係合部材63bが第2係合凹所61dに突入して係合することにより、ハンドル本体52が第2操作位置に移行する。
【0023】
図11において、操作位置維持機構65は、ハンドル機構50が図8の第1操作位置または図9の第2操作位置にかかわらず、操作機構57の操作姿勢を維持するための機構である。操作位置維持機構65は、リンク部材66と、回動片67と、支持基板68と、軸体69とを備える。リンク部材66は、回動固定部材61と回動片67とをリンクする長尺の部材であり、軸体66aを介して回動固定部材61に、軸体66bを介して回動片67に連結している。回動片67は、軸体69を介して支持基板68に一体に連結されている。支持基板68は、操作連結部材57bを介して操作機構57を固定している。
【0024】
次に、ハンドル機構50の第1操作位置と第2操作位置との切替動作について説明する。図8のハンドル機構50の第1操作位置から、レバー62を握って、係合部材63bを第1係合凹所61cから外して、軸体61aを中心に連結部材54を回動する。このとき、図12に示すように、操作位置維持機構65のリンク部材66は、軸体66aを中心に回動するとともに、軸体66bを介して回動片67も回動させる。回動片67には、支持基板68が一体に形成されているので、支持基板68も図示の反時計方向へ回動する。そして、図9に示すように、係合部材63bが第2係合凹所61dに係合することにより、ハンドル機構50が第2操作位置に固定される。このとき、図13に示すように、操作機構57は、支持基板68と一体に反時計方向へ回動することにより、その操作部57cを上方に向くように姿勢が維持される。
【0025】
(2)−3 ステップ機構90の構成および動作
図14は運搬用車両10の後部のステップ機構90を説明する平面図、図15は図14の側面図である。ステップ機構90は、車体フレーム20の車体基板21上にスライド可能に設けられており、可動支持板91と、可動展開板95と、可動展開板95の後部下面に装着された補助輪98と、ガイド機構100とを備えている。図16はステップ機構90の各部品を分解した斜視図である。可動支持板91は、第1可動板本体92と、第1可動板本体92の後部に一体形成された後支持板93とを備えている。第1可動板本体92はほぼ矩形である。後支持板93は、可動支持板91の後部から車幅と同じ位置まで幅方向に拡張して形成されている。可動展開板95は、可動支持板91上にスライド可能に載置されており、ほぼ三角形の部材である第2可動板本体96を備えている。可動展開板95は、車体基板21の前後方向の中心線の両側に、同一形状で2つ配置することにより構成されている。
【0026】
ガイド機構100は、可動支持板91の第2方向への動きに連動して、可動展開板95を幅方向(第2方向)に展開・収納するためのガイドする機構である。ガイド機構100は、スライド支持部102と、軸支部104と、溝ガイド部106と、回動ガイド部110と、位置決め部112とを備えている。スライド支持部102は、車体基板21の両側に形成されており、可動支持板91の両側を押さえることで車体フレーム20とほぼ同一な面上で第1方向(前後方向)にスライド可能に支持する部材である。
軸支部104は、可動支持板91に突設された軸突部104aと、可動展開板95に形成された軸孔104bとを備えており、軸突部104aを中心に可動展開板95を回動可能に支持している。
溝ガイド部106は、車体基板21に形成されたガイド溝107と、可動展開板95の前端に下方に突設されガイド溝107に倣う軸突起108とを備えている。ガイド溝107は、前側直進部107aと、傾斜部107bと、後側直進部107cとを備え、これらを連続して形成している。
回動ガイド部110は、可動支持板91の後支持板93の前縁に沿って形成されたガイド溝110aと、可動展開板95の後部に円弧状に形成されガイド溝110aに嵌合してスライドするガイド突条110bとを備えている。
位置決め部112は、可動支持板91の下面に形成された前側位置決め突起113aおよび後側位置決め突起113bと、車体基板21に形成された第1本体側位置決め突起114aおよび第2本体側位置決め突起114bとを備えている。
【0027】
図17ないし図21はステップ機構90の可動支持板91および可動展開板95が収納されている収納位置から、可動支持板91および可動展開板95を引き出した拡張位置まで、可動支持板91および可動展開板95を操作する一連の動作を説明する説明図である。ここで、図17ないし図19はステップ機構90を側面から見た図である。図20は図17のステップ機構90を、図21は図19のステップ機構90をそれぞれ上方から見た図である。図17および図20において、可動支持板91および可動展開板95を収納一から拡張位置まで引き出すには、可動支持板91の後支持板93を持ち上げて引き出す。これにより、可動支持板91の後側位置決め突起113bが車体基板21の第2本体側位置決め突起114bから外れる。そして、図18に示すように、後支持板93をもって可動支持板91を引き出すと、可動支持板91は、車体基板21のスライド支持部102にガイドされて移動する。このとき、図16に示すように、可動支持板91の上に載置された可動展開板95は、可動展開板95の軸孔104bが可動支持板91の軸突部104aで軸支持されているから、図21に示すように、この軸支持箇所を中心に回動しつつ、軸突起108がガイド溝107の傾斜部107bにガイドされる。可動展開板95は、軸突起108がガイド溝107の傾斜部107bを倣うときに、可動展開板95の後部が幅方向の外方へ拡がる。また、可動展開板95のガイド突条110bがガイド溝110aにガイドされ、可動展開板95のスムーズな回動が行なわれる。そして、軸突起108がガイド溝107の後側直進部107cの終端までガイドされると、可動展開板95の外側端部は、後支持板93の外側端に達する。そして、図19に示すように、持ち上げている可動支持板91を下げると、前側位置決め突起113aが第2本体側位置決め突起114bに位置決めされ、軸突起108がガイド溝107の後端に位置決めされることにより、可動支持板91の前後方向への移動が規制される。
【0028】
ステップ機構90の可動支持板91および可動展開板95を収納するには、上述と逆の動作、つまり図19から図17への動作を行なう。可動支持板91の後支持板93の端部を持ち上げて、前側位置決め突起113aが第2本体側位置決め突起114bに位置決めされているロック状態を解除する。続いて、後支持板93の箇所を押し込んで可動支持板91を移動すると、可動支持板91の移動とともに可動展開板95が軸孔104bおよび軸突部104aの軸支持箇所を中心に回動する。これにより、可動展開板95が幅方向の内方へ移動して、それらの間隔が狭くなる。可動展開板95が可動支持板91上で狭まって収納されるとともに、可動支持板91も車体基板21上に合わさるように収納される。
【0029】
(3) 実施例の効果
(3)−1 運搬用車両10は、自走モードおよびアシストモードの2つのモードで運転することができる。すなわち、図1において、自走モードで運転するには、ステップ機構90を拡張位置(2点鎖線)に設定するとともに、ハンドル機構50を第1操作位置(2点鎖線)に設定する。これにより、人が、ステップ機構90の上に乗って、ハンドル機構50の操作機構57を操作することにより、運搬用車両10の駆動力で運転することができる。一方、アシストモードで運転するには、ステップ機構90を収納位置(実線)に設定するとともに、ハンドル機構50を第2操作位置(実線)に設定する。これにより、人がフレーム機構40の把持部55を持って歩きながら運搬用車両10を押す。このとき、操作機構57を操作することにより、運搬用車両10の駆動力でアシストすることができる。
【0030】
(3)−2 図5ないし図7に示すように、運搬用車両10において、フレーム機構40の支持枠体41は、起立傾倒機構42の回動部材43により、車体フレーム20の端部に回動可能に支持されており、運搬用車両10の走行時や収納時、積載物を積載するときに対応するために、起立姿勢、第1傾倒姿勢および第2傾倒姿勢にそれぞれ設定することができる。すなわち、起立傾倒機構42は、ロック部材47をロック位置に設定すると、支持枠体41が起立姿勢に設定される。この起立姿勢では、支持枠体41がロック部材47により固定され、積載部22と反対側に、つまり運搬用車両の外側へ不用意に倒れることがない。
【0031】
(3)−3 起立傾倒機構42は、ロック部材47をロック位置に設定した状態にて、支持枠体41に積載部22側への力を加えると、回動部材43の第1軸44aを中心に回動して、積載部22側へ倒れる第1傾倒姿勢になる。この姿勢にて、支持枠体41は、積載部22側へコンパクトに収納することができる。
【0032】
(3)−4 起立傾倒機構42は、ロック部材47を非ロック位置に設定して、支持枠体41に積載部22と反対側への力を加えると、支持枠体41が第2軸44bを中心に回動して、第2傾倒姿勢になる。この姿勢にて、支持枠体41は、該支持枠体41上に積載物を乗せてスライドさせることで、積載物を積載部22へ容易に導くことができる。
【0033】
(3)−5 図8ないし図13に示すように、ハンドル機構50において、ハンドル本体52は、支持基材51との間でハンドル支持機構60の軸体61aを介して回動可能に支持されており、図12および図13に示すように、支持基材51に対する角度の違いにより、第1操作位置と第2操作位置とに設定することができる。このとき、ハンドル本体52は、第1操作位置または第2操作位置に切り替えても、図10に示すように操作機構57がハンドル本体52で囲まれた領域に配置されるから、人が把持部55を手で握ったときに、体の他の部分で操作部57cに接触することがなく、誤操作を生じ難い。しかも、図12および図13に示すように、ハンドル本体52を第1操作位置または第2操作位置に切り替えても、操作位置維持機構65は、リンク部材66が操作機構57を回動させて、操作部57cを同一の方向(上方)に向くように配置するから、操作機構57の操作性に優れている。
【0034】
(3)−6 図14ないし図21に示すように、ステップ機構90は、車体フレーム20の後部に、第1方向へスライド可能に支持された可動支持板91および可動展開板95を備え、ガイド機構100によりスライドさせる。ガイド機構100は、可動支持板91が第1方向へスライドするときに、可動展開板95が可動支持板91に連動して、第1方向と交差しかつ第1方向とほぼ同一の面上にて第2方向に積載面を拡張するように展開される。すなわち、可動展開板95は、可動支持板91に連動して、第1方向だけでなく、第2方向へも広がり、積載面を広くするから、面倒な作業を必要とせず、使い勝手がよい。しかも、可動展開板95は、展開された状態から、第2方向へコンパクトに収納することができる。
【0035】
なお、この発明は上記実施例に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。
(a) 上記実施例では、積載部22に積載される積載物は、荷物の場合について説明したが、これに限らず、車体フレーム20に固定された椅子を搭載している場合には人であってもよく、また、車椅子などであってもよい。
(b) 上記支持枠体41の第2傾倒姿勢は、荷物を積載部22に導くために好適な傾きであればよく、支持枠体41の上端が床面に付く位置まで傾くほか、水平方向などであってもよい。
(c) 上記実施例では、可動展開板95は、可動展開板95にスライド可能に設けたが、これに限らず、第2可動板が第1可動板に連動して第2方向へ展開される構成であれば、車体フレーム上に第2可動板がスライド可能に載置される構成であってもよい。
(d) また、上記実施例では、駆動源としてモータを用いたが、これに限らず、小型のエンジンなどであってもよい。
【符号の説明】
【0036】
10…運搬用車両
20…車体フレーム
21…車体基板
22…積載部
30…駆動装置
31…前輪
32…後輪
33…モータ
40…フレーム機構
41…支持枠体
41a…規制部材
41c…被ロック部材
42…起立傾倒機構
43…回動部材
43b…規制部
44a…第1軸
44b…第2軸
45…スプリング
46a,46b…固定部材
47…ロック部材
47a…ロック本体
47b…ペダル
47c…ロック部
47d…軸孔
48…スプリング
49…軸体
50…ハンドル機構
51…支持基材
52…ハンドル本体
53…連結部材
54…連結部材
55…把持部
57…操作機構
57a…操作支持台
57b…操作連結部材
57c…操作部
60…ハンドル支持機構
61…回動固定部材
61a…軸体
61c…第1係合凹所
61d…第2係合凹所
62…レバー
63a…レバー連結棒
63b…係合部材
64…スプリング
65…操作位置維持機構
66…リンク部材
66a…軸体
66b…軸体
67…回動片
68…支持基板
69…軸体
90…ステップ機構
91…可動支持板
92…第1可動板本体
93…後支持板
95…可動展開板
96…第2可動板本体
98…補助輪
100…ガイド機構
102…スライド支持部
104…軸支部
104a…軸突部
104b…軸孔
106…溝ガイド部
107…ガイド溝
107a…前側直進部
107b…傾斜部
107c…後側直進部
108…軸突起
110…回動ガイド部
110a…ガイド溝
110b…ガイド突条
112…位置決め部
113a…前側位置決め突起
113b…後側位置決め突起
114a…第1本体側位置決め突起
114b…第2本体側位置決め突起
【特許請求の範囲】
【請求項1】
積載物を載置する積載面を有する車体フレーム(20)の端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構(90)を備えた運搬用車両において、
上記ステップ機構(90)は、上記車体フレーム(20)に重なって配置されている複数の可動展開板(95)と、該可動展開板(95)を上記車体フレーム(20)と平行である第1方向にスライドさせるとともに該可動展開板(95)を上記第1方向と交差する第2方向へスライドさせることで上記可動展開板(95)を収納または展開するようにガイドするガイド機構(100)と
を備え、
上記ガイド機構(100)は、上記複数の可動展開板(95)を収納するときに該可動展開板(95)の互いの距離を狭め、上記複数の可動展開板(95)を展開するときに該可動展開板(95)の互いの距離を広げるように構成した運搬用車両。
【請求項2】
請求項1に記載の運搬用車両において、
上記ガイド機構(100)は、上記車体フレーム(20)に上記可動展開板(95)を連携して倣うように形成されたガイド溝(107)および軸突起(108)を有するガイド部を備え、上記可動展開板(95)が上記ガイド部にガイドされることで、上記可動展開板(95)が上記第2方向へ展開または収納されるように構成されている運搬用車両。
【請求項3】
請求項1または請求項2に記載の運搬用車両において、
上記ステップ機構(90)は、上記車体フレーム(20)から上記第1方向へスライド可能に支持された可動支持板(91)を有し、
上記ガイド機構(100)は、上記可動展開板(95)を上記可動支持板(91)に回動可能に軸支する軸支部(104)と、上記可動展開板(95)が上記ガイド部にガイドされることで、上記可動展開板(95)が上記軸支部(104)を中心に回動して上記第2方向へ展開または収納されるように構成されている運搬用車両。
【請求項4】
請求項1ないし請求項3のいずれかに記載の運搬用車両において、
上記ガイド機構(100)は、上記可動支持板(91)を上記車体フレーム(20)に位置決めする位置決め機構を有する運搬用車両。
【請求項1】
積載物を載置する積載面を有する車体フレーム(20)の端部から引き出され、積載物を乗せる積載面の面積を拡張するステップ機構(90)を備えた運搬用車両において、
上記ステップ機構(90)は、上記車体フレーム(20)に重なって配置されている複数の可動展開板(95)と、該可動展開板(95)を上記車体フレーム(20)と平行である第1方向にスライドさせるとともに該可動展開板(95)を上記第1方向と交差する第2方向へスライドさせることで上記可動展開板(95)を収納または展開するようにガイドするガイド機構(100)と
を備え、
上記ガイド機構(100)は、上記複数の可動展開板(95)を収納するときに該可動展開板(95)の互いの距離を狭め、上記複数の可動展開板(95)を展開するときに該可動展開板(95)の互いの距離を広げるように構成した運搬用車両。
【請求項2】
請求項1に記載の運搬用車両において、
上記ガイド機構(100)は、上記車体フレーム(20)に上記可動展開板(95)を連携して倣うように形成されたガイド溝(107)および軸突起(108)を有するガイド部を備え、上記可動展開板(95)が上記ガイド部にガイドされることで、上記可動展開板(95)が上記第2方向へ展開または収納されるように構成されている運搬用車両。
【請求項3】
請求項1または請求項2に記載の運搬用車両において、
上記ステップ機構(90)は、上記車体フレーム(20)から上記第1方向へスライド可能に支持された可動支持板(91)を有し、
上記ガイド機構(100)は、上記可動展開板(95)を上記可動支持板(91)に回動可能に軸支する軸支部(104)と、上記可動展開板(95)が上記ガイド部にガイドされることで、上記可動展開板(95)が上記軸支部(104)を中心に回動して上記第2方向へ展開または収納されるように構成されている運搬用車両。
【請求項4】
請求項1ないし請求項3のいずれかに記載の運搬用車両において、
上記ガイド機構(100)は、上記可動支持板(91)を上記車体フレーム(20)に位置決めする位置決め機構を有する運搬用車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−71489(P2013−71489A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210055(P2011−210055)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000241463)豊田合成株式会社 (3,467)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000241463)豊田合成株式会社 (3,467)
【Fターム(参考)】
[ Back to top ]