
運搬車両
【課題】走行路の状況や荷台への荷重の状況に対応して、荷崩れや車両の転倒を防止することの可能な運搬車両を提供する。
【解決手段】運搬車両は、輪軸50と、フレームと、運搬車両の重心を補正する重心補正装置10であって、輪軸50に対して固定され、ローラー受け円弧溝32が形成されたスイング台30と、フレーム3に対して固定され、ローラー受け円弧溝32内をスライドするスライドローラー24が設置されたフレーム受け台20と、スイング台30とフレーム受け台20とを相対的にスライドさせるための駆動部材40と、を有し、スイング台30とフレーム受け台20とを相対的に回転スライドさせる重心補正装置10と、を備える。
【解決手段】運搬車両は、輪軸50と、フレームと、運搬車両の重心を補正する重心補正装置10であって、輪軸50に対して固定され、ローラー受け円弧溝32が形成されたスイング台30と、フレーム3に対して固定され、ローラー受け円弧溝32内をスライドするスライドローラー24が設置されたフレーム受け台20と、スイング台30とフレーム受け台20とを相対的にスライドさせるための駆動部材40と、を有し、スイング台30とフレーム受け台20とを相対的に回転スライドさせる重心補正装置10と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷物を運ぶための運搬車両に関し、特に車両の重心を補正可能な運搬車両に関する。
【背景技術】
【0002】
従来から種々の運搬車両が提供されているが、山林内のきつい傾斜面を走行する木材運搬車両では、傾斜面を走行する際に車両の幅方向に荷台が大きく傾いてしまう場合があるため、積荷の木材が荷崩れて落下したり、荷台の傾斜により運搬車両が横転してしまったりするケースがあった。
【0003】
下記特許文献1においては、傾斜面を走行する際に、この傾斜面に対して平行となるように車軸の回転運動を行う車軸角度調整機構を備えることで、車体の水平維持を図る運搬車が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−258673号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1では、片方の車輪の車軸を傾斜させるだけであるため、走行路全体が傾斜している場合には、対応することが困難であり、荷台が傾斜してしまって荷台面からの資材の落下や、車両の転倒が生じてしまうおそれがある。
【0006】
また、近年、積載状態が不明なコンテナ貨物の偏荷重により、コンテナ輸送車両が横転するといった問題が起きてきているが、上記特許文献1に開示されている技術では、このような問題に対応することは困難である。
【0007】
本発明は、このような課題に鑑みてなされたものであり、走行路の状況や荷台への荷重の状況に対応して、荷崩れや車両の転倒を防止することの可能な運搬車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る運搬車両は、輪軸とフレームとを備える運搬車両において、前記フレームと前記輪軸とを車幅方向に相対的にスライドさせることで、前記運搬車両の重心を補正する重心補正装置であって、前記輪軸に対して固定されるスイング台と、前記フレームに対して固定されるフレーム受け台と、前記スイング台と前記フレーム受け台とを相対的にスライドさせるための駆動部材と、を有し、前記スイング台又は前記フレーム受け台の一方には、円弧形状の円弧溝が形成され、前記フレーム受け台又は前記スイング台の他方は、前記円弧溝に沿って円弧状にスライドするスライダーを有し、前記スイング台と前記フレーム受け台が相対的に回転スライドすることで重心を補正する重心補正装置を備えることを特徴とする。
【発明の効果】
【0009】
本発明に係る運搬車両によれば、走行路の状況や荷台への荷重の状況に対応して、フレームと輪軸とを車幅方向に相対的に回転スライドさせることで、荷崩れや車両の転倒を効果的に防止することができる。
【図面の簡単な説明】
【0010】
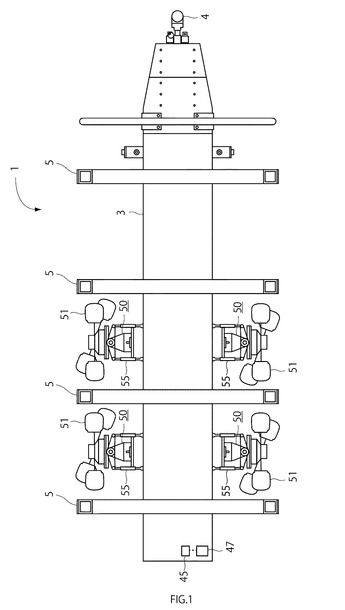
【図1】図1は、本発明の実施形態に係る運搬車両の平面図である。
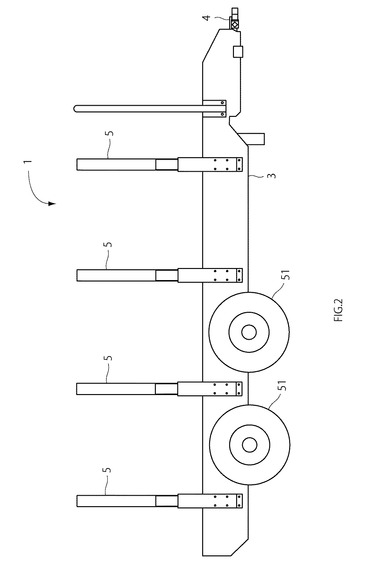
【図2】図2は、本発明の実施形態に係る運搬車両の側面図である。
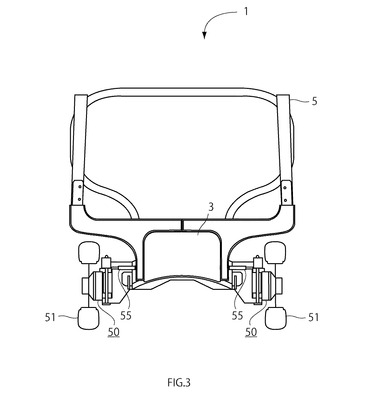
【図3】図3は、本発明の実施形態に係る運搬車両の背面図である。
【図4】図4は、本発明の実施形態に係る重心補正装置の斜視図である。
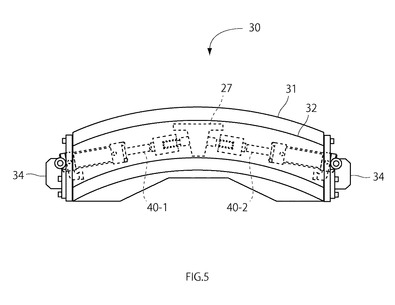
【図5】図5は、本発明の実施形態に係るスイング台の背面図である。
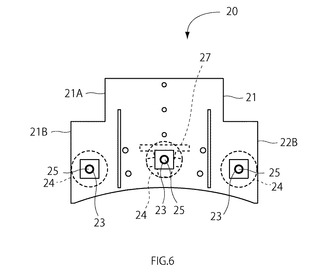
【図6】図6は、本発明の実施形態に係るフレーム受け台の背面図である。
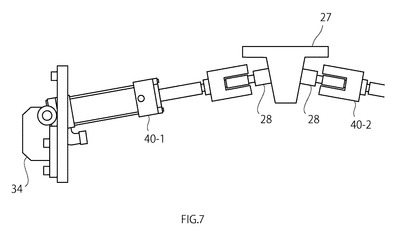
【図7】図7は、本発明の実施形態に係る油圧シリンダーの設置状態を示す図である。
【図8】図8は、本発明の実施形態に係る重心補正装置の駆動状態を示す図である。
【図9】図9は、本発明の実施形態の変形例に係るコンテナトレーラーの構成を概略的に示す模式平面図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら、本発明の実施形態に係る運搬車両について説明する。図1は、本実施形態に係る運搬車両の平面図である。図2は、本実施形態に係る運搬車両の側面図である。図3は、本実施形態に係る運搬車両の背面図である。本実施形態では、運搬車両として、トラクター等によって牽引される被牽引車であって、木材を運搬するための木材運搬車を例に挙げて説明する。
【0012】
図1乃至図3に示すように、運搬車両1は、フレーム3、牽引接続部4、架台枠5、重心補正装置10、輪軸50、ステアリング55を備えている。フレーム3は、運搬車両1の骨格であって荷台を構成し、その前方に、牽引車と接続するための牽引接続部4が設置されている。
【0013】
架台枠5は、運搬車両1に積載される木材を保持するためのU字形状の枠であり、前方から後方にかけて4つの架台枠5がフレーム5に対して固定設置されている。重心補正装置10は、後述する輪軸50に対して、進行方向に垂直な面におけるフレーム3の傾斜角を調整することで、運搬車両1の重心を補正する機能を備える。
【0014】
輪軸50は、フレーム3に対して、進行方向の中程よりも若干後方の一箇所と、さらに後方のもう一箇所との二箇所に設置されている。各輪軸50は、ホイールとタイヤからなる車輪51を左右に一つずつ備えており、運搬車両1は合計4つの車輪51を備えている。輪軸50は、重心補正装置10を介して、フレーム3を支えている。
【0015】
ステアリング55は、車輪51を垂直軸周りに回転させて車輪51の向きを変えることで、運搬車両1の進行方向を変える部材であり、例えば、牽引車両のハンドルの回転に同期して駆動される。
【0016】
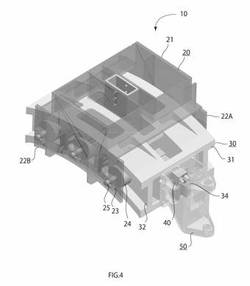
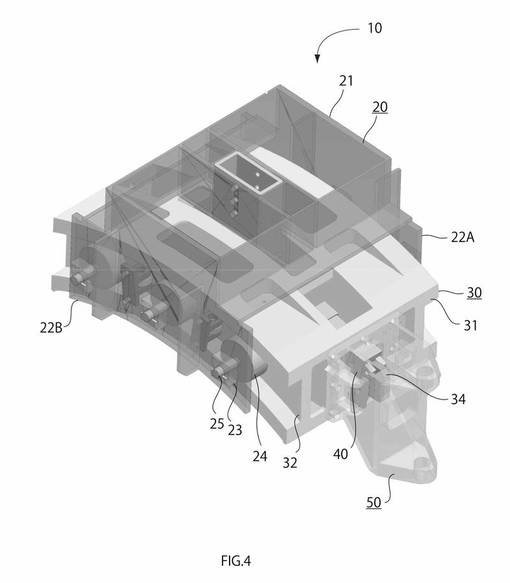
続いて、図4乃至図7を参照しながら、重心補正装置10の構成について詳細に説明する。図4は、本実施形態に係る重心補正装置の一部を透視して示す斜視図である。図5は、本実施形態に係るスイング台の背面図である。図6は、本実施形態に係るフレーム受け台の背面図である。図7は、本実施形態に係る油圧シリンダーの設置状体を示す図であり、車両の後方から見た図である。
【0017】
重心補正装置10は、フレーム3を支えるフレーム受け台20と、輪軸50に固定されると共にフレーム受け台20を円弧状にスライド可能に保持するスイング台30と、フレーム受け台20をスライドさせるための左右2つの油圧シリンダー40と、フレーム3の傾斜角を計測する傾斜センサー45と、重心補正装置10の駆動制御を行う制御装置47とを備えている。
【0018】
図4及び図5に示すように、スイング台30は、全体として上に凸の円弧形状をした金属製の中空体であるスイング台本体31と、油圧シリンダー40の根元側をスイング台本体31に固定するためのシリンダー固定部材34とを備えている。
【0019】
シリンダー固定部材34は、スイング台本体41の左右両側面にネジ留めにより固定され、このシリンダー固定部材34に油圧シリンダー40の根元側の一端が接続される。なお、油圧シリンダー40の根元側端部は、シリンダー固定部材34に対して、運搬車両1の進行方向に垂直な面(車幅方向に平行な面)内で回動可能に接続されている。
【0020】
スイング台30の前後の両壁面には、フレーム受け台20をスライドさせるために左右方向に延在する、上に凸の円弧形状のローラー受け円弧溝32が形成されている。このローラー受け円弧溝32内を後述するスライドローラー24が移動することで、スイング台30に対してフレーム受け台20を車幅方向に円弧状にスライドさせることができる。
【0021】
図4及び図6に示すように、フレーム受け台20は、金属製の中空体である受け台本体21と、受け台本体21に回転可能に軸支されるスライドローラー24と、油圧シリンダー40の先端を受け台本体21に固定するためのシリンダー固定部材27とを備えている。
【0022】
受け台本体21は、直方体形状の枠体からなる上部体21Aと、二枚の平行板22からなる下部体21Bとから構成されており、上部体21Aと下部体21Bとは一体形成されている。下部体21Bの二枚の平行板22は、スイング台30の前側と後側に位置しており、下部体21Bにより前後においてスイング台30を挟み込む構成となっている。各平行板22には、スライドローラー24のローラー軸25を軸支するための軸受穴23が形成されている。
【0023】
ここで、スライドローラー24は、前側平行板22Aに3つのスライドローラー24が軸支され、後側平行板22Bに3つのスライドローラー24が軸支されるため、各平行板22には、3つの軸受穴23が形成されている。
【0024】
スライドローラー24は、上述したようにフレーム受け台20のローラー受け円弧溝32内に保持されて移動するため、前後3つのスライドローラー24も同一円弧上に列んで設置される必要がある。したがって、各平行板22の3つの軸受穴23も同一円弧上に列んで形成されている。
【0025】
なお、ローラー受け円弧溝32の下面の円弧、軸受穴23が位置する円弧、ローラー受け円弧溝32の上面の円弧は、中心が同一の円弧であり、各円弧の半径は、それぞれR1=890mm、R2=950mm、R3=1010mmである。これにより、スライド機構を構成するスライドローラー24とローラー受け円弧溝32とが同一の中心を軸として相対的にスムーズな回転スライドを行うことができる。なお、効果的に重心補正をするためには、回転スライドの中心の円弧(本実施形態ではR2)の半径は、運搬車両1の車幅よりも小さくするのが望ましい。
【0026】
シリンダー固定部材27は、正面から見て略T字形状の部材であり、両側に油圧シリンダー40の先端を固定するための円柱状突起部28が形成されている。シリンダー固定部材27は、ネジ留めにより受け台本体21の中心部分に固定されている。
【0027】
図7に示すように、油圧シリンダー40は、スイング台本体31の側面に固定されたシリンダー固定部材34に根元側の一端が接続され、受け台本体21の中心部分に固定されたシリンダー固定部材27に先端側の他端が接続されている。また、本実施形態では、左右両側に油圧シリンダー40が設置されており、進行方向に向かって左側に第一油圧シリンダー40−1、右側に第二油圧シリンダー40−2が設置されている。
【0028】
図1に示すように、傾斜センサー45は、フレーム3の後端部に設置されており、フレーム3の車幅方向における傾斜角を測定する。制御装置47は、フレーム3の後端部に設置されており、傾斜センサー45及び第一,第二油圧シリンダー40−1,40−2と配線で接続されている。
【0029】
制御装置47は、傾斜センサー45から受信した傾斜情報に基づき、フレーム3が常時水平となるように油圧シリンダー40の駆動を制御して、スイング台30とフレーム受け台20とを相対的に回転スライドさせる。運搬車両1の荷台(フレーム3)が大きく傾くと、木材が落下したり、荷崩れが生じたりするだけでなく、最悪のケースでは重心の片寄りにより運搬車両1が横転してしまう。これに対して、本実施形態では、フレーム3が常時水平になるように制御することで、木材の落下や荷崩れ、運搬車両1の横転を防止することが可能となる。
【0030】
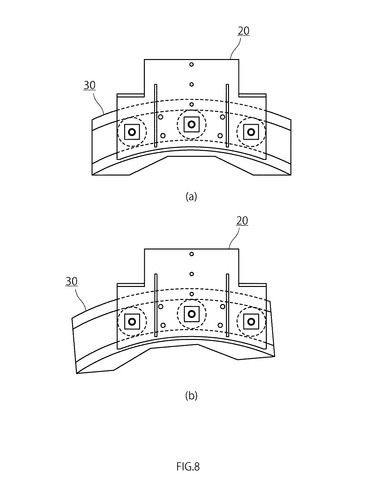
続いて、図8を参照しながら重心補正装置10の駆動状態について説明する。図8は、重心補正装置の駆動状態を示す図であり、車両の後方から見た図である。図8(a)は、フレーム受け台とスイング台とがスライドしていない標準状態を示す図、図8(b)は、フレーム受け台がスイング台に対して右側に回転スライドした状態を示す図である。
【0031】
図8(a)に示すように、標準状態では、フレーム受け台20の車幅方向中心と、スイング台30の車幅方向中心とが一致し、左右どちらにもスライドしていない状態である。このとき、油圧シリンダー40は、第一及び第二油圧シリンダー40の何れも伸縮していない状態である。
【0032】
ここで、左側が大きく下がった傾斜山道(例えば、左側に10°傾斜)に運搬車両1がさしかかったとすると、輪軸50が左側に10°傾斜し、輪軸50が固定されているスイング台30も左側に10°傾斜する。そして、重心補正装置10が標準状態であれば、フレーム受け台20もスイング台30と同じく左側に10°傾斜し、フレーム受け台20に固定されたフレーム3も左側に10°傾斜してしまう。
【0033】
フレーム3が左側に10°傾くと、傾斜センサー45は、左側に10°傾いた旨の傾斜情報を制御装置47へと送信する。傾斜情報を受信した制御装置47は、フレーム3が水平となるように、第一及び第二油圧シリンダー40をそれぞれ独立して駆動制御する。
【0034】
具体的には、図8(b)に示すように、左側に10°傾斜したスイング台30に対して、フレーム受け台20を右側に10°回転スライドさせることで、フレーム受け台20を水平状態に維持する。この回転スライドは、制御装置47の制御により、左側の第一油圧シリンダー41−1が所定量伸ばされ、右側の第二油圧シリンダー41−2が所定量縮められることで実現される。
【0035】
このように、本実施形態では、フレーム3の傾きを傾斜センサー45で検出し、フレーム3が常に水平となるように重心補正装置10を駆動制御することで、荷台に積載された木材の落下や荷崩れ、運搬車両1の横転を確実に防止することができる。
【0036】
また、本実施形態では、フレーム受け台20とスイング台30とが、上に凸の円弧状に相互に回転スライドするように構成されているため、車幅方向に水平にスライドさせる場合と比べて、重心を同じだけ移動させる場合であっても、車幅方向の移動が少なくて済み、車両の横方向へのはみ出しを抑えることができる。
【0037】
なお、ローラー受け円弧溝32は、下に凸の形状でも良い。但し、木材運搬車が走行するような舗装されていない山道では、車両の走行により車輪が接地する部分が掘り下げられ、道の中央部分が高くなっている場合が多い。この場合には、上に凸のローラー受け円弧溝32とすることで、図3に示すように運搬車両1の車幅方向中央部分の地上高を高くすることができ、地面にあたることなく安全に舗装されていない山道を走行することができる。
【0038】
また、ローラー受け円弧溝32を上に凸の形状とした場合には、フレーム3を車幅方向に回転スライドさせるときに、標準状態よりもフレーム3が下がり、重心も下がることになるので、不安定になりがちなスライド状態において、運搬車両1を安定させることができる。
【0039】
また、本実施形態においては、スライド機構として、スライドローラー24がローラー受け円弧溝32内を移動する構成を採用しているので、高い加工精度を必要とせず、製造コストを低減させることができる。また、ローラーであれば転がり抵抗が小さく、スライドのための駆動力も小さくて済み、駆動部材のコストを低減することもできる。
【0040】
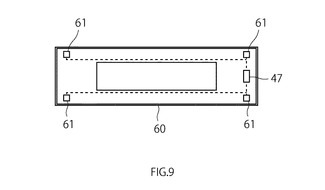
続いて、本実施形態の変形例について図9を参照しながら説明する。本変形例では、運搬車両としてのコンテナトレーラーに本発明を適用した場合について説明する。図9は、本変形例に係るコンテナトレーラーの荷台を構成するフレームの構成を概略的に示す模式平面図である。
【0041】
本変形例では、上記実施形態の傾斜センサー45の代わりに荷重センサー61を備えることを特徴とし、その他の構成は上記実施形態と同じである。上記実施形態では、フレーム3の傾斜情報に基づきフレーム3が水平となるようにフレーム受け台20とスイング台30とを回転スライドさせていたが、本変形例では、フレーム60上の四隅に設置された4つの荷重センサー61からの出力に基づいて、運搬車両1の重心が車幅方向の一方に大きく偏らないようにフレーム受け台20とスイング台30とを回転スライドさせる。
【0042】
具体的には、制御装置47は、フレーム60上の四隅に設置された4つの荷重センサー61と接続されており、フレーム60上にコンテナが積載された場合に、4つの荷重センサー61の出力に基づいてコンテナの重心を算出する。そして、コンテナの重心が車幅方向の一方に大きく偏っている場合には、当該重心と逆方向にフレーム受け台20を回転スライドさせることで、フレーム60を逆方向に傾斜させる。
【0043】
このようにして偏荷重のコンテナ自体を重心と逆方向に傾斜させることで、コンテナの重心の偏りを補正し、運搬車両1の重心が大きく偏ることによる転倒等を防止することができる。この逆方向への傾斜は、望ましくはコンテナの重心が車幅方向中心付近に位置するように制御することが望ましい。
【0044】
本変形例によれば、開けることの禁じられているコンテナを積載する場合であっても、コンテナを開けて積荷状態を確認することなく、適切にコンテナの重心を補正することが可能である。
【0045】
以上、変形例も含めて本発明の実施形態について説明したが、本発明の実施形態は上述した実施の形態に限定されるものではなく、本発明の主旨を逸脱しない範囲内で種々の変形が可能である。例えば、本発明は木材運搬車やコンテナトレーラーだけでなく、種々の運搬車両に適用できるのは言うまでもない。
【0046】
また、スライド機構を構成するスライドローラーの数は適宜変更できるのは言うまでもない。また、スライド機構として、スライドローラーではなく、円弧形状部材が円弧溝内を移動する構成を採用しても良い。但し、この場合には、円弧形状部材が滑らかに回転スライドするように、円弧溝内にベアリング等を設置するのが望ましい。
【0047】
また、スライド機構の駆動部材としては、油圧シリンダーに限らず、他の駆動部材を用いても良く、例えば、スクリューモーター、ジャッキシリンダー、ブレーキ付きの油圧モータを使用することができる。
【0048】
また、上記実施形態では、スライド機構を構成する円弧溝をスイング台に形成し、スライドローラーをフレーム受け台に設置したが、円弧溝をフレーム受け台に形成し、スライドローラーをスイング台に設置するようにしても良い。
【符号の説明】
【0049】
1 運搬車両
3 フレーム
10 重心補正装置
20 フレーム受け台
21 受け台本体
22 平行板
23 軸受穴
24 スライドローラー
25 ローラー軸
27 シリンダー固定部材
30 スイング台
31 スイング台本体
32 ローラー受け円弧溝
34 シリンダー固定部材
40 油圧シリンダー
45 傾斜センサー
47 制御装置
50 輪軸
60 フレーム
61 荷重センサー
【技術分野】
【0001】
本発明は、荷物を運ぶための運搬車両に関し、特に車両の重心を補正可能な運搬車両に関する。
【背景技術】
【0002】
従来から種々の運搬車両が提供されているが、山林内のきつい傾斜面を走行する木材運搬車両では、傾斜面を走行する際に車両の幅方向に荷台が大きく傾いてしまう場合があるため、積荷の木材が荷崩れて落下したり、荷台の傾斜により運搬車両が横転してしまったりするケースがあった。
【0003】
下記特許文献1においては、傾斜面を走行する際に、この傾斜面に対して平行となるように車軸の回転運動を行う車軸角度調整機構を備えることで、車体の水平維持を図る運搬車が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−258673号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1では、片方の車輪の車軸を傾斜させるだけであるため、走行路全体が傾斜している場合には、対応することが困難であり、荷台が傾斜してしまって荷台面からの資材の落下や、車両の転倒が生じてしまうおそれがある。
【0006】
また、近年、積載状態が不明なコンテナ貨物の偏荷重により、コンテナ輸送車両が横転するといった問題が起きてきているが、上記特許文献1に開示されている技術では、このような問題に対応することは困難である。
【0007】
本発明は、このような課題に鑑みてなされたものであり、走行路の状況や荷台への荷重の状況に対応して、荷崩れや車両の転倒を防止することの可能な運搬車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る運搬車両は、輪軸とフレームとを備える運搬車両において、前記フレームと前記輪軸とを車幅方向に相対的にスライドさせることで、前記運搬車両の重心を補正する重心補正装置であって、前記輪軸に対して固定されるスイング台と、前記フレームに対して固定されるフレーム受け台と、前記スイング台と前記フレーム受け台とを相対的にスライドさせるための駆動部材と、を有し、前記スイング台又は前記フレーム受け台の一方には、円弧形状の円弧溝が形成され、前記フレーム受け台又は前記スイング台の他方は、前記円弧溝に沿って円弧状にスライドするスライダーを有し、前記スイング台と前記フレーム受け台が相対的に回転スライドすることで重心を補正する重心補正装置を備えることを特徴とする。
【発明の効果】
【0009】
本発明に係る運搬車両によれば、走行路の状況や荷台への荷重の状況に対応して、フレームと輪軸とを車幅方向に相対的に回転スライドさせることで、荷崩れや車両の転倒を効果的に防止することができる。
【図面の簡単な説明】
【0010】
【図1】図1は、本発明の実施形態に係る運搬車両の平面図である。
【図2】図2は、本発明の実施形態に係る運搬車両の側面図である。
【図3】図3は、本発明の実施形態に係る運搬車両の背面図である。
【図4】図4は、本発明の実施形態に係る重心補正装置の斜視図である。
【図5】図5は、本発明の実施形態に係るスイング台の背面図である。
【図6】図6は、本発明の実施形態に係るフレーム受け台の背面図である。
【図7】図7は、本発明の実施形態に係る油圧シリンダーの設置状態を示す図である。
【図8】図8は、本発明の実施形態に係る重心補正装置の駆動状態を示す図である。
【図9】図9は、本発明の実施形態の変形例に係るコンテナトレーラーの構成を概略的に示す模式平面図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら、本発明の実施形態に係る運搬車両について説明する。図1は、本実施形態に係る運搬車両の平面図である。図2は、本実施形態に係る運搬車両の側面図である。図3は、本実施形態に係る運搬車両の背面図である。本実施形態では、運搬車両として、トラクター等によって牽引される被牽引車であって、木材を運搬するための木材運搬車を例に挙げて説明する。
【0012】
図1乃至図3に示すように、運搬車両1は、フレーム3、牽引接続部4、架台枠5、重心補正装置10、輪軸50、ステアリング55を備えている。フレーム3は、運搬車両1の骨格であって荷台を構成し、その前方に、牽引車と接続するための牽引接続部4が設置されている。
【0013】
架台枠5は、運搬車両1に積載される木材を保持するためのU字形状の枠であり、前方から後方にかけて4つの架台枠5がフレーム5に対して固定設置されている。重心補正装置10は、後述する輪軸50に対して、進行方向に垂直な面におけるフレーム3の傾斜角を調整することで、運搬車両1の重心を補正する機能を備える。
【0014】
輪軸50は、フレーム3に対して、進行方向の中程よりも若干後方の一箇所と、さらに後方のもう一箇所との二箇所に設置されている。各輪軸50は、ホイールとタイヤからなる車輪51を左右に一つずつ備えており、運搬車両1は合計4つの車輪51を備えている。輪軸50は、重心補正装置10を介して、フレーム3を支えている。
【0015】
ステアリング55は、車輪51を垂直軸周りに回転させて車輪51の向きを変えることで、運搬車両1の進行方向を変える部材であり、例えば、牽引車両のハンドルの回転に同期して駆動される。
【0016】
続いて、図4乃至図7を参照しながら、重心補正装置10の構成について詳細に説明する。図4は、本実施形態に係る重心補正装置の一部を透視して示す斜視図である。図5は、本実施形態に係るスイング台の背面図である。図6は、本実施形態に係るフレーム受け台の背面図である。図7は、本実施形態に係る油圧シリンダーの設置状体を示す図であり、車両の後方から見た図である。
【0017】
重心補正装置10は、フレーム3を支えるフレーム受け台20と、輪軸50に固定されると共にフレーム受け台20を円弧状にスライド可能に保持するスイング台30と、フレーム受け台20をスライドさせるための左右2つの油圧シリンダー40と、フレーム3の傾斜角を計測する傾斜センサー45と、重心補正装置10の駆動制御を行う制御装置47とを備えている。
【0018】
図4及び図5に示すように、スイング台30は、全体として上に凸の円弧形状をした金属製の中空体であるスイング台本体31と、油圧シリンダー40の根元側をスイング台本体31に固定するためのシリンダー固定部材34とを備えている。
【0019】
シリンダー固定部材34は、スイング台本体41の左右両側面にネジ留めにより固定され、このシリンダー固定部材34に油圧シリンダー40の根元側の一端が接続される。なお、油圧シリンダー40の根元側端部は、シリンダー固定部材34に対して、運搬車両1の進行方向に垂直な面(車幅方向に平行な面)内で回動可能に接続されている。
【0020】
スイング台30の前後の両壁面には、フレーム受け台20をスライドさせるために左右方向に延在する、上に凸の円弧形状のローラー受け円弧溝32が形成されている。このローラー受け円弧溝32内を後述するスライドローラー24が移動することで、スイング台30に対してフレーム受け台20を車幅方向に円弧状にスライドさせることができる。
【0021】
図4及び図6に示すように、フレーム受け台20は、金属製の中空体である受け台本体21と、受け台本体21に回転可能に軸支されるスライドローラー24と、油圧シリンダー40の先端を受け台本体21に固定するためのシリンダー固定部材27とを備えている。
【0022】
受け台本体21は、直方体形状の枠体からなる上部体21Aと、二枚の平行板22からなる下部体21Bとから構成されており、上部体21Aと下部体21Bとは一体形成されている。下部体21Bの二枚の平行板22は、スイング台30の前側と後側に位置しており、下部体21Bにより前後においてスイング台30を挟み込む構成となっている。各平行板22には、スライドローラー24のローラー軸25を軸支するための軸受穴23が形成されている。
【0023】
ここで、スライドローラー24は、前側平行板22Aに3つのスライドローラー24が軸支され、後側平行板22Bに3つのスライドローラー24が軸支されるため、各平行板22には、3つの軸受穴23が形成されている。
【0024】
スライドローラー24は、上述したようにフレーム受け台20のローラー受け円弧溝32内に保持されて移動するため、前後3つのスライドローラー24も同一円弧上に列んで設置される必要がある。したがって、各平行板22の3つの軸受穴23も同一円弧上に列んで形成されている。
【0025】
なお、ローラー受け円弧溝32の下面の円弧、軸受穴23が位置する円弧、ローラー受け円弧溝32の上面の円弧は、中心が同一の円弧であり、各円弧の半径は、それぞれR1=890mm、R2=950mm、R3=1010mmである。これにより、スライド機構を構成するスライドローラー24とローラー受け円弧溝32とが同一の中心を軸として相対的にスムーズな回転スライドを行うことができる。なお、効果的に重心補正をするためには、回転スライドの中心の円弧(本実施形態ではR2)の半径は、運搬車両1の車幅よりも小さくするのが望ましい。
【0026】
シリンダー固定部材27は、正面から見て略T字形状の部材であり、両側に油圧シリンダー40の先端を固定するための円柱状突起部28が形成されている。シリンダー固定部材27は、ネジ留めにより受け台本体21の中心部分に固定されている。
【0027】
図7に示すように、油圧シリンダー40は、スイング台本体31の側面に固定されたシリンダー固定部材34に根元側の一端が接続され、受け台本体21の中心部分に固定されたシリンダー固定部材27に先端側の他端が接続されている。また、本実施形態では、左右両側に油圧シリンダー40が設置されており、進行方向に向かって左側に第一油圧シリンダー40−1、右側に第二油圧シリンダー40−2が設置されている。
【0028】
図1に示すように、傾斜センサー45は、フレーム3の後端部に設置されており、フレーム3の車幅方向における傾斜角を測定する。制御装置47は、フレーム3の後端部に設置されており、傾斜センサー45及び第一,第二油圧シリンダー40−1,40−2と配線で接続されている。
【0029】
制御装置47は、傾斜センサー45から受信した傾斜情報に基づき、フレーム3が常時水平となるように油圧シリンダー40の駆動を制御して、スイング台30とフレーム受け台20とを相対的に回転スライドさせる。運搬車両1の荷台(フレーム3)が大きく傾くと、木材が落下したり、荷崩れが生じたりするだけでなく、最悪のケースでは重心の片寄りにより運搬車両1が横転してしまう。これに対して、本実施形態では、フレーム3が常時水平になるように制御することで、木材の落下や荷崩れ、運搬車両1の横転を防止することが可能となる。
【0030】
続いて、図8を参照しながら重心補正装置10の駆動状態について説明する。図8は、重心補正装置の駆動状態を示す図であり、車両の後方から見た図である。図8(a)は、フレーム受け台とスイング台とがスライドしていない標準状態を示す図、図8(b)は、フレーム受け台がスイング台に対して右側に回転スライドした状態を示す図である。
【0031】
図8(a)に示すように、標準状態では、フレーム受け台20の車幅方向中心と、スイング台30の車幅方向中心とが一致し、左右どちらにもスライドしていない状態である。このとき、油圧シリンダー40は、第一及び第二油圧シリンダー40の何れも伸縮していない状態である。
【0032】
ここで、左側が大きく下がった傾斜山道(例えば、左側に10°傾斜)に運搬車両1がさしかかったとすると、輪軸50が左側に10°傾斜し、輪軸50が固定されているスイング台30も左側に10°傾斜する。そして、重心補正装置10が標準状態であれば、フレーム受け台20もスイング台30と同じく左側に10°傾斜し、フレーム受け台20に固定されたフレーム3も左側に10°傾斜してしまう。
【0033】
フレーム3が左側に10°傾くと、傾斜センサー45は、左側に10°傾いた旨の傾斜情報を制御装置47へと送信する。傾斜情報を受信した制御装置47は、フレーム3が水平となるように、第一及び第二油圧シリンダー40をそれぞれ独立して駆動制御する。
【0034】
具体的には、図8(b)に示すように、左側に10°傾斜したスイング台30に対して、フレーム受け台20を右側に10°回転スライドさせることで、フレーム受け台20を水平状態に維持する。この回転スライドは、制御装置47の制御により、左側の第一油圧シリンダー41−1が所定量伸ばされ、右側の第二油圧シリンダー41−2が所定量縮められることで実現される。
【0035】
このように、本実施形態では、フレーム3の傾きを傾斜センサー45で検出し、フレーム3が常に水平となるように重心補正装置10を駆動制御することで、荷台に積載された木材の落下や荷崩れ、運搬車両1の横転を確実に防止することができる。
【0036】
また、本実施形態では、フレーム受け台20とスイング台30とが、上に凸の円弧状に相互に回転スライドするように構成されているため、車幅方向に水平にスライドさせる場合と比べて、重心を同じだけ移動させる場合であっても、車幅方向の移動が少なくて済み、車両の横方向へのはみ出しを抑えることができる。
【0037】
なお、ローラー受け円弧溝32は、下に凸の形状でも良い。但し、木材運搬車が走行するような舗装されていない山道では、車両の走行により車輪が接地する部分が掘り下げられ、道の中央部分が高くなっている場合が多い。この場合には、上に凸のローラー受け円弧溝32とすることで、図3に示すように運搬車両1の車幅方向中央部分の地上高を高くすることができ、地面にあたることなく安全に舗装されていない山道を走行することができる。
【0038】
また、ローラー受け円弧溝32を上に凸の形状とした場合には、フレーム3を車幅方向に回転スライドさせるときに、標準状態よりもフレーム3が下がり、重心も下がることになるので、不安定になりがちなスライド状態において、運搬車両1を安定させることができる。
【0039】
また、本実施形態においては、スライド機構として、スライドローラー24がローラー受け円弧溝32内を移動する構成を採用しているので、高い加工精度を必要とせず、製造コストを低減させることができる。また、ローラーであれば転がり抵抗が小さく、スライドのための駆動力も小さくて済み、駆動部材のコストを低減することもできる。
【0040】
続いて、本実施形態の変形例について図9を参照しながら説明する。本変形例では、運搬車両としてのコンテナトレーラーに本発明を適用した場合について説明する。図9は、本変形例に係るコンテナトレーラーの荷台を構成するフレームの構成を概略的に示す模式平面図である。
【0041】
本変形例では、上記実施形態の傾斜センサー45の代わりに荷重センサー61を備えることを特徴とし、その他の構成は上記実施形態と同じである。上記実施形態では、フレーム3の傾斜情報に基づきフレーム3が水平となるようにフレーム受け台20とスイング台30とを回転スライドさせていたが、本変形例では、フレーム60上の四隅に設置された4つの荷重センサー61からの出力に基づいて、運搬車両1の重心が車幅方向の一方に大きく偏らないようにフレーム受け台20とスイング台30とを回転スライドさせる。
【0042】
具体的には、制御装置47は、フレーム60上の四隅に設置された4つの荷重センサー61と接続されており、フレーム60上にコンテナが積載された場合に、4つの荷重センサー61の出力に基づいてコンテナの重心を算出する。そして、コンテナの重心が車幅方向の一方に大きく偏っている場合には、当該重心と逆方向にフレーム受け台20を回転スライドさせることで、フレーム60を逆方向に傾斜させる。
【0043】
このようにして偏荷重のコンテナ自体を重心と逆方向に傾斜させることで、コンテナの重心の偏りを補正し、運搬車両1の重心が大きく偏ることによる転倒等を防止することができる。この逆方向への傾斜は、望ましくはコンテナの重心が車幅方向中心付近に位置するように制御することが望ましい。
【0044】
本変形例によれば、開けることの禁じられているコンテナを積載する場合であっても、コンテナを開けて積荷状態を確認することなく、適切にコンテナの重心を補正することが可能である。
【0045】
以上、変形例も含めて本発明の実施形態について説明したが、本発明の実施形態は上述した実施の形態に限定されるものではなく、本発明の主旨を逸脱しない範囲内で種々の変形が可能である。例えば、本発明は木材運搬車やコンテナトレーラーだけでなく、種々の運搬車両に適用できるのは言うまでもない。
【0046】
また、スライド機構を構成するスライドローラーの数は適宜変更できるのは言うまでもない。また、スライド機構として、スライドローラーではなく、円弧形状部材が円弧溝内を移動する構成を採用しても良い。但し、この場合には、円弧形状部材が滑らかに回転スライドするように、円弧溝内にベアリング等を設置するのが望ましい。
【0047】
また、スライド機構の駆動部材としては、油圧シリンダーに限らず、他の駆動部材を用いても良く、例えば、スクリューモーター、ジャッキシリンダー、ブレーキ付きの油圧モータを使用することができる。
【0048】
また、上記実施形態では、スライド機構を構成する円弧溝をスイング台に形成し、スライドローラーをフレーム受け台に設置したが、円弧溝をフレーム受け台に形成し、スライドローラーをスイング台に設置するようにしても良い。
【符号の説明】
【0049】
1 運搬車両
3 フレーム
10 重心補正装置
20 フレーム受け台
21 受け台本体
22 平行板
23 軸受穴
24 スライドローラー
25 ローラー軸
27 シリンダー固定部材
30 スイング台
31 スイング台本体
32 ローラー受け円弧溝
34 シリンダー固定部材
40 油圧シリンダー
45 傾斜センサー
47 制御装置
50 輪軸
60 フレーム
61 荷重センサー
【特許請求の範囲】
【請求項1】
輪軸とフレームとを備える運搬車両において、
前記フレームと前記輪軸とを車幅方向に相対的にスライドさせることで、前記運搬車両の重心を補正する重心補正装置であって、
前記輪軸に対して固定されるスイング台と、
前記フレームに対して固定されるフレーム受け台と、
前記スイング台と前記フレーム受け台とを相対的にスライドさせるための駆動部材と、を有し、
前記スイング台又は前記フレーム受け台の一方には、円弧形状の円弧溝が形成され、前記フレーム受け台又は前記スイング台の他方は、前記円弧溝に沿って円弧状にスライドするスライダーを有し、前記スイング台と前記フレーム受け台が相対的に回転スライドすることで重心を補正する重心補正装置を備えることを特徴とする運搬車両。
【請求項2】
前記円弧溝は、上に凸の円弧形状であることを特徴とする請求項1記載の運搬車両。
【請求項3】
前記スライダーは、スライドローラーであり、前記スライドローラーが前記円弧溝内を移動することで、前記スイング台と前記フレーム受け台とが相対的に回転スライドすることを特徴とする請求項1又は2記載の運搬車両。
【請求項4】
前記フレームに設置された、当該フレームの車幅方向の傾斜角を計測するための傾斜センサーと、
前記傾斜センサーの出力に基づき、前記フレームが水平となるように前記駆動部材を制御する制御装置と、をさらに備えることを特徴とする請求項1乃至3何れか1項に記載の運搬車両。
【請求項5】
前記フレームに設置された、当該フレームへの荷重を計測するための複数の荷重センサーと、
前記荷重センサーの出力に基づき、前記フレームへの荷重重心が車幅方向の一方に大きく偏らないように前記駆動部材を制御する制御装置と、をさらに備えることを特徴とする請求項1乃至3何れか1項に記載の運搬車両。
【請求項1】
輪軸とフレームとを備える運搬車両において、
前記フレームと前記輪軸とを車幅方向に相対的にスライドさせることで、前記運搬車両の重心を補正する重心補正装置であって、
前記輪軸に対して固定されるスイング台と、
前記フレームに対して固定されるフレーム受け台と、
前記スイング台と前記フレーム受け台とを相対的にスライドさせるための駆動部材と、を有し、
前記スイング台又は前記フレーム受け台の一方には、円弧形状の円弧溝が形成され、前記フレーム受け台又は前記スイング台の他方は、前記円弧溝に沿って円弧状にスライドするスライダーを有し、前記スイング台と前記フレーム受け台が相対的に回転スライドすることで重心を補正する重心補正装置を備えることを特徴とする運搬車両。
【請求項2】
前記円弧溝は、上に凸の円弧形状であることを特徴とする請求項1記載の運搬車両。
【請求項3】
前記スライダーは、スライドローラーであり、前記スライドローラーが前記円弧溝内を移動することで、前記スイング台と前記フレーム受け台とが相対的に回転スライドすることを特徴とする請求項1又は2記載の運搬車両。
【請求項4】
前記フレームに設置された、当該フレームの車幅方向の傾斜角を計測するための傾斜センサーと、
前記傾斜センサーの出力に基づき、前記フレームが水平となるように前記駆動部材を制御する制御装置と、をさらに備えることを特徴とする請求項1乃至3何れか1項に記載の運搬車両。
【請求項5】
前記フレームに設置された、当該フレームへの荷重を計測するための複数の荷重センサーと、
前記荷重センサーの出力に基づき、前記フレームへの荷重重心が車幅方向の一方に大きく偏らないように前記駆動部材を制御する制御装置と、をさらに備えることを特徴とする請求項1乃至3何れか1項に記載の運搬車両。
【図1】


【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図4】
【公開番号】特開2012−218521(P2012−218521A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−84584(P2011−84584)
【出願日】平成23年4月6日(2011.4.6)
【出願人】(511087268)越智機械工業株式会社 (1)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月6日(2011.4.6)
【出願人】(511087268)越智機械工業株式会社 (1)
【Fターム(参考)】
[ Back to top ]