
運搬道路を設計するためのシステムと方法
機械性能に基づき運搬道路を設計する方法は、1つまたは複数の運搬道路パラメータを受信する工程(310)と、運搬道路上で操作される少なくとも1種類の機械を特定する工程(320)と、を含む。本方法はまた、少なくとも1種類の機械に関連する少なくとも1つの目標動作パラメータを選択する工程(330)と、少なくとも1つの目標動作パラメータに対応する動作値を予測するために少なくとも1種類の機械の性能をシミュレートする工程(340)と、を含む。対応する目標動作パラメータの閾値範囲内に予測動作値がない場合、1つまたは複数の運搬道路パラメータを調整する(360)。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は、一般には運搬道路の設計に関し、より詳細には運搬道路上で操作される機械の性能に基づき運搬道路を設計するためのシステムと方法に関する。
【背景技術】
【0002】
運搬道路設計は多くの作業環境の効率と生産性における重要な側面である。特に重機を採用する作業環境における低品質の運搬道路設計は、道路上で動作する機械の遅くかつ非効率な性能をもたらすだけでなく、機械駆動系部品に対する過度の応力と歪の潜在的な原因となり得る。これは重い貨物を運ぶ機械にとっては特に有害であろう。
【0003】
コンピュータが広範に使用されるようになる前、運搬道路設計は、設計が構造的に適切であることを保証するために、高度な訓練を受けた工学専門家と建設要員の専門知識を必要とする比較的集約的な手作業処理であった。この設計工程は労働および時間集約的であるだけでなくかなり高価であった。これは、設計を生成するとともに設計の適合性を必須標準規格および規則のすべてにより検証するために多くの工数が必要とされたからである。
【0004】
コンピュータの発展後、特殊なコンピュータ支援設計(CAD)ソフトウエアプログラムが技術者と建設専門家に、運搬道路の設計を支援するツールを提供した。コンピュータの処理能力を活用することにより、これらのCADプログラムの多くは設計に伴う複雑な構造計算をわずか数秒内に行うことができた。これらのCADプログラムは結果として著しい時間節約になるだけでなく、手作業計算技術に伴うヒューマンエラーの可能性を減らし、結果としてより信頼できる設計をもたらした。
【0005】
多くの処理および計算機能の効率的性能に加えて、これらのCADツールはまた、運搬経路のレイアウトと、運搬道路青写真および建設パッケージの生成と、建設に先立つ運搬道路設計の試験/解析と、を支援するインターフェースを提供した。これら従来のCADツールは、解析、マッピングおよび設計の下図作成等の運搬道路の設計後の必須周辺機能の多くを行う解決策を提供することにより運搬道路設計を大いに単純化したが、運搬道路設計を作成または開発するのに十分には洗練されていなかった。したがって、複雑でかつ高度に専門化した手作業の運搬道路設計技術への依存性を低減するためには、ユーザ定義の設計パラメータに基づき運搬道路設計を生成する対話型ソフトウェアツールが必要と考えられる。
【0006】
少なくとも1つのこのような対話型道路設計ソフトウェアツールは山本による(特許文献1)に記載されている。(特許文献1)には、ユーザ定義の設計条件を受信し、設計条件と適用可能なあらゆる道路設計規則および標準に従って道路設計を生成し、道路設計の3次元コンピュータ処理レンダリングを出力するソフトウェアベースの道路設計システムが記載されている。ソフトウェアベースの道路設計システムはまた、複数のユーザがインターネットまたは他の共有ネットワークを介し設計システムにアクセスしそれを操作できるようにする複数のクライアントシステムにネットワーク接続される。
【0007】
(特許文献1)に記載されたものなどのいくつかの従来の道路設計ツールは、ユーザ定義の道路設計パラメータに基づき道路設計を生成するソフトウェアシステムを提供することができるが、これらはいくつかの欠点を有すると考えられる。例えば、従来のソフトウェア設計システムは、道路設計における個々の機械または一群の機械の特定の性能パラメータを考慮することができない。多くの種類の重機は最も効率的に働く特定の動作領域を有するので、機械の性能を考慮しない従来システムにより設計された運搬道路は機械の効率と生産性を制限することがある。
【0008】
また、多くの作業環境は特定の性能目標を達成するように設計された運搬道路を必要とすることがある。例えば、燃料価格高騰および/または排出基準により燃料消費量が考慮される鉱山環境では、運搬道路上で操作される機械の燃料消費量の最小化につながる運搬道路を設計することは有利であろう。しかしながら、(特許文献1)に記載されたシステムを含む従来の道路設計システムの多くは個々の機械または一群の機械の特定の性能パラメータを考慮することができないので、運搬道路設計者は道路設計が特定の機械群の所望燃料消費量要件を満たすのに有効かどうかを判断することができない。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】米国特許出願公開第2002/0010569号明細書
【発明の概要】
【発明が解決しようとする課題】
【0010】
運搬道路を設計するための本開示のシステムと方法は、上に述べられた問題の1つまたは複数を克服することに関する。
【課題を解決するための手段】
【0011】
一態様によると、本開示は機械性能に基づき運搬道路を設計する方法に関する。本方法は1つまたは複数の運搬道路パラメータを受信する工程と運搬道路上で操作される少なくとも1種類の機械を特定する工程とを含む。少なくとも1種類の機械に関連する少なくとも1つの目標動作パラメータを選択することができ、少なくとも1つの目標動作パラメータに対応する動作値を予測するために少なくとも1種類の機械の性能をシミュレートすることができる。予測動作値が対応する目標動作パラメータの閾値範囲内にない場合、1つまたは複数の運搬道路パラメータを調整することができる。
【0012】
別の態様によると、本開示は、運搬道路上で操作される1つまたは複数の機械に関連する性能データに基づき運搬道路の実際勾配をカスタマイズする方法に関する。本方法は、少なくとも1つの機械の目標動作パラメータを定義する工程と、シミュレーションに基づき目標動作パラメータの予測動作値を生成するために少なくとも1つの機械に関連する有効積算勾配値(total effective grade value)を変化させることにより少なくとも1つの機械の性能をシミュレートする工程と、を含む。予測動作値を目標動作パラメータの閾値範囲内に入るようにさせる有効積算勾配値を特定することができ、有効積算勾配値に関連する実際勾配を決定することができる。本方法はまた、1つまたは複数の模擬性能結果と実際勾配データを含む運搬道路設計概要を生成する工程を含むことができる。
【0013】
さらに別の態様によると、本開示は運搬経路管理システムに関する。本システムは、加入者から1つまたは複数の運搬道路パラメータを受信するとともに運搬道路上で操作される少なくとも1種類の機械に関連する性能データを受信するように構成される入力装置を含むことができる。本システムはまた、入力装置に通信で結合される性能シミュレータを含むことができる。性能シミュレータは、少なくとも1種類の機械の少なくとも1つの目標動作パラメータに対応する閾値範囲を設定し、1つまたは複数の初期の運搬道路パラメータと少なくとも1つの目標動作パラメータとに基づき初期の運搬道路設計を生成するように構成されてよい。性能シミュレータはまた、少なくとも1つの目標動作パラメータのそれぞれに対応する動作値を予測するために、初期の運搬道路設計を使用して少なくとも1種類の機械の性能をシミュレートするように構成されてよい。1つまたは複数の運搬道路パラメータは、対応する目標動作パラメータの閾値範囲内に予測動作値がない場合、第2の運搬道路設計を生成するように調整されてもよい。
【図面の簡単な説明】
【0014】
【図1】本開示実施形態による例示的な作業環境を示す図である。
【図2】図1の作業環境に関連するある部品を説明する概略図である。
【図3】ある開示実施形態による、運搬道路上で操作される1つまたは複数の機械の模擬性能に基づいて運搬道路を設計するための例示的な方法を示すフローチャートである。
【図4】ある開示実施形態による、運搬道路上で操作される1つまたは複数の機械から収集される性能データに基づいて運搬道路勾配をカスタマイズするための例示的な実施形態を示すフローチャートである。
【発明を実施するための形態】
【0015】
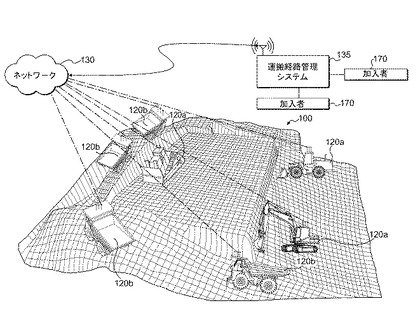
図1には、本開示実施形態による例示的な作業環境100を示す。作業環境100は、採鉱、建設、エネルギー探査および/または生成、製造、輸送、農業等の商業的または工業的タスク、あるいは他の産業タイプに関連する任意のタスクを実行するように協働するシステムと装置を含むことができる。図1に示す例示的な実施形態によると、作業環境100は、通信ネットワーク130を介し運搬経路管理システム135に結合される1つまたは複数の機械120a、120bを含む採鉱環境を含むことができる。作業環境100は、1つまたは複数の機械120a、120bの状態、健全性および性能に関連する情報を監視、収集、フィルタ処理するとともに、この情報を運搬経路管理システム135および/または加入者170等の1つまたは複数のバックエンドシステムまたはエンティティに配信するように構成されてよい。追加の部品および/または上に掲載されたものとは異なる部品を作業環境100内に含んでよいと考えられる。
【0016】
図1に示すように、機械120a、120bは1つまたは複数の掘削機120aと1つまたは複数の輸送機械120bを含むことができる。掘削機120aは、鉱山から材料を取り出すとともにその材料を1つまたは複数の輸送機械120b上に載せるように構成された任意の機械を具現することができる。掘削機120aの非限定的な例としては、バケツタイプ掘削機、電磁気式リフト装置、バックホウローダ、ブルドーザ等が挙げられる。輸送機械120bは、例えば連接台車、ダンプカー、または材料を輸送するように構成された他の任意のトラックなど作業環境100内で材料を輸送するように構成された任意の機械を具現することができる。図1に示す機械の数、大きさおよびタイプはあくまで例示的であり、限定することを意図していない。したがって、作業環境100は、追加の部品、上に掲載されたものより少ない部品および/またはそれとは異なる部品を含んでよいと考えられる。例えば、作業環境100は、スキッドステアローダ、トラックタイプトラクタ、材料移動車両、または作業環境100の事業に寄与し得る他の好適な固定または移動式機械を含むことができる。
【0017】
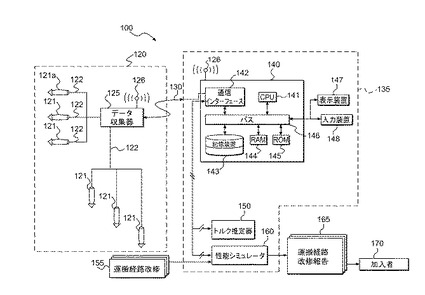
一実施形態では、機械120a、120bのそれぞれは、機械120a、120bの1つまたは複数の部品に関連する情報を監視、収集、および/または配信するための搭載データ収集および通信装置を含むことができる。図2に示すように、機械120a、120bはそれぞれ、特には、通信線122を介し1つまたは複数のデータ収集器125に結合されたセンサまたは電子制御モジュール等の1つまたは複数の監視装置121;1つまたは複数の送受信器装置126;および/または機械120a、120bの操作に関連する情報を監視、収集および通信するための他の部品を含むことができる。機械120a、120bのそれぞれはまた、運搬経路管理システム135等の非搭載システムから情報、警報信号、オペレータ命令、または他のメッセージまたは命令を受信するように構成されてよい。上記部品は例示的であって、限定することを意図していない。したがって、本開示実施形態は、機械120a、120bのそれぞれが追加部品および/または上に掲載されたものとは異なる部品を含むことを想定している。
【0018】
監視装置121は、1つまたは複数の機械120a、120bに関連する性能データを収集するための任意の装置を含むことができる。例えば、監視装置121は、エンジンおよび/または機械の速度および/または場所;流体圧力、流速、温度、汚染レベル、および/または流体の粘度;電流および/または電圧レベル;流体(すなわち、燃料、油等)消費速度;荷重レベル(すなわち、積載値、最大積載量限界のパーセント値、積載量履歴、積載量分布等);変速機出力比、スリップ等;運搬勾配と牽引データ;駆動軸トルク;計画され実行される保全および/または修理作業の間隔;および機械120a、120bの他の動作パラメータ等の、動作パラメータを測定するための1つまたは複数のセンサを含むことができる。
【0019】
一実施形態では、輸送機械120bはそれぞれ、駆動軸に加えられたトルクを監視するための少なくとも1つのトルクセンサ121aを含むことができる。あるいは、トルクセンサ121aは駆動軸上のトルクを計算または導出することができるパラメータを監視するように構成されてよい。1つまたは複数の監視装置121は作業環境100に関連するある環境特徴を監視するように構成されてよいと考えられる。例えば、1つまたは複数の機械120a、120bは、機械が移動する表面に関連する実際勾配を測定する傾斜計を含むことができる。1つまたは複数の監視装置121を機械の場所データの収集専用にしてもよいとも考えられる。例えば、機械120a、120bはそれぞれ、機械に関連する場所データ(例えば、緯度、経度、高度等)を監視するためのGPS装置を含むことができる。
【0020】
データ収集器125は、監視装置121により収集された性能データを受信、収集、パッケージ化、および/または配信するように構成されてよい。本明細書で使用されるように用語「性能データ」は、1つまたは複数の機械120にあるいはその構成部品またはサブシステムの任意のものに関連する少なくとも1つの動作態様を示す任意のタイプのデータを指す。性能データの非限定的例としては、燃料レベル、油圧、エンジン温度、冷却材流量、冷却液温度、タイヤ空気圧等の健全性情報、あるいは機械120a、120bの1つまたは複数の部品またはサブシステムの健全性を示す他の任意のデータが挙げられる。代替案としておよび/または追加として、性能データは、エンジン出力状態(例えば、エンジンの運転、アイドル、オフ状態)、エンジン時間、回転速度、機械対地速度、機械の場所および高度、動作中の機械の現在のギア等の状態情報、あるいは機械120の状態を示す他の任意のデータを含むことができる。任意選択的に、性能データはまた、作業進捗情報、荷重対容量比、シフト期間、運搬統計値(重量、積載量等)、燃料効率等のある生産性情報、あるいは機械120の生産性を示す他の任意のデータを含んでよい。代替案としておよび/または追加として、性能データは、機械120a、120bの1つまたは複数の態様または部品を制御するための制御信号を含むことができる。データ収集器125は、機械の動作中に通信線122を介し1つまたは複数の監視装置から性能データを受信することができる。
【0021】
一実施形態によると、データ収集器125は、通信ネットワーク130を介し運搬経路管理システム135に受信データを自動的に送信することができる。代替案としてまたは追加として、データ収集器125は、運搬経路管理システム135へのその後の送信のために、所定期間の間受信データをメモリ内に格納することができる。例えば、機械と運搬経路管理システム135間の通信路が一時的に利用不可能となった場合、性能データを検索することができ、通信路が復元されるとその後送信することができる。
【0022】
通信ネットワーク130は、機械120a、120bと運搬経路管理システム135等の非搭載システムとの間の双方向通信を提供する任意のネットワークを含むことができる。例えば通信ネットワーク130は、例えば衛星通信システム等の無線ネットワーキングプラットホームにわたって機械120a、120bと運搬経路管理システム135とを通信で結合することができる。代替案としておよび/または追加として、通信ネットワーク130は、1つまたは複数の機械120a、120bと運搬経路管理システム135とを通信で結合するための適切な1つまたは複数の広帯域通信プラットホーム(例えば、セルラー、ブルートゥース、マイクロ波、ポイントツーポイント無線、ポイントツーマルチポイント無線、マルチポイントツーマルチポイント無線、または多くの部品をネットワーク化するための他の任意の適切な通信プラットホーム等)を含むことができる。衛星無線通信ネットワークとして通信ネットワーク130を例示したが、通信ネットワーク130は例えばイーサネット(登録商標)、光ファイバー、導波管等の有線ネットワーク、あるいは他の任意のタイプの有線通信ネットワークを含んでよいと考えられる。
【0023】
運搬経路管理システム135は、1つまたは複数の個々の機械の性能または動作を監視、解析、最適化、および/または制御することにより運搬経路の性能を改善するように協働する1つまたは複数のハードウェア部品および/またはソフトウェアアプリケーションを含むことができる。運搬経路管理システム135は、機械120a、120bから収集した性能データを収集、配信、解析、および/または管理するための状態監視システム140を含むことができる。運搬経路管理システム135はまた、駆動軸トルクを決定し、有効積算勾配(total effective grade)を推定し、転がり抵抗を計算し、および/または機械または機械駆動系の性能を示すことができる他の適切な特徴を決定するためのトルク推定器150を含むことができる。運搬経路管理システム135はまた、作業環境100内で動作する機械の性能ベースのモデルをシミュレートするとともに、作業環境生産性を改善するために機械120a、120bの動作パラメータおよび/または運搬経路の物理的特徴を調整する性能シミュレータ160を含むことができる。
【0024】
状態監視システム140は、機械120a、120bに関連する性能データを受信、解析、送信、および/または配信するように構成された任意のコンピュータシステムを含むことができる。状態監視システム140は、通信ネットワーク130を介し1つまたは複数の機械120に通信で結合されてよい。状態監視システム140は、機械120a、120bのそれぞれに関連する性能データを収集し広めるように構成された集中型サーバおよび/またはデータベースを具現することができる。収集されると、状態監視システム140は、データタイプ、優先度等に従って性能データを分類および/またはフィルタ処理する。重大または最優先データの場合には、状態監視システム140は、重大事象を経験した機械を特定する「緊急」または「重大」メッセージを1人または複数の作業現場要員(例えば、修理技術者、プロジェクト管理者等)に送信するように構成されてよい。例えば、機械が使えなくされるか、非認可作業領域に入るか、あるいは重大なエンジン動作条件を経験した場合、状態監視システム140は、プロジェクト管理者、現場職長、シフト管理者、機械オペレータ、および/または修理技術者に機械に関する潜在的な問題を示すメッセージ(テキストメッセージ、電子メール、ページング等)を送信することができる。
【0025】
状態監視システム140は、ある開示実施形態による処理を実行するハードウェアおよび/またはソフトウェア部品を含むことができる。例えば、図2に例示されるように、状態監視システム140は、1つまたは複数の送受信器装置126、中央処理装置(CPU)141、通信インターフェース142、記憶装置143、ランダムアクセスメモリ(RAM)モジュール144および読み取り専用メモリ(ROM)モジュール145を含む1つまたは複数のコンピュータ可読メモリ装置、表示装置147、および/または入力装置148を含むことができる。上記部品は例示的であり、限定することを意図していない。状態監視システム140は上に掲載されたものの代替および/または追加部品を含んでよいと考えられる。
【0026】
CPU141は、ある開示実施形態による1つまたは複数の処理を実行するために命令を実行しデータを処理する1つまたは複数の処理装置であってよい。例えば、CPU141は、状態監視システム140が機械120a、120bのデータ収集器125から性能データを要求および/または受信することを可能にするソフトウェアを実行することができる。CPU141はまた、収集された性能データを記憶装置143に格納するソフトウェアを実行することができる。さらに、CPU141は、状態監視システム140が1つまたは複数の機械120a、120bから収集された性能データを解析し、機械に関する潜在的問題を特定する診断および/または予後解析を行い、あらゆる潜在的問題を機械オペレータまたは加入者170に通知し、および/または機械性能を改善するための勧告を含むカスタマイズ作業分析報告を提供する、ことを可能にするソフトウェアを実行することができる。
【0027】
CPU141は、状態監視システム140に関連する1つまたは複数の部品間の通信媒体を提供するように構成することができる共通情報バス146に接続されてよい。例えば、共通情報バス146は、複数の装置との間で情報を通信するための1つまたは複数の部品を含むことができる。CPU141は、以下に説明されるように、ある開示実施形態による方法を実行するために例えば記憶装置143、RAM144、および/またはROM145等のコンピュータ可読媒体装置に格納された一連のコンピュータプログラム命令を実行することができる。
【0028】
通信インターフェース142は、送受信器装置126を介し状態監視システム140と遠隔システム(例えば、機械120a、120b)間の双方向データ通信用に構成された1つまたは複数の構成要素を含むことができる。例えば、通信インターフェース142は、1つまたは複数の変調器、復調器、マルチプレクサ、デマルチプレクサ、ネットワーク通信装置、無線装置、アンテナ、モデム、あるいは状態監視システム140と遠隔システムまたは部品間の双方向通信インターフェースを支援するように構成された他の任意の装置を含むことができる。
【0029】
1つまたは複数のコンピュータ可読媒体装置は、状態監視システム140のCPU141により使用される情報、命令、および/またはプログラムコードを格納するように構成された記憶装置143、RAM144、ROM145、および/または他の任意の磁気データ、電子データ、フラッシュデータ、または光学データコンピュータ可読媒体装置を含むことができる。記憶装置143は、磁気ハードドライブ、光ディスクドライブ、フロッピードライブ、フラッシュドライブ、あるいは他の任意のこのような情報格納装置を含むことができる。ランダムアクセスメモリ(RAM)装置144は、CPU141により情報と命令を格納する任意の動的記憶装置を含むことができる。RAM144は、CPU141により実行される命令の実行中に一時変数または他の中間情報を格納してもよい。動作中に、オペレーティングシステム(図示せず)のいくつかの部分またはすべての部分をRAM144内にロードすることができる。さらに、読み取り専用メモリ(ROM)モジュール145は、CPU141により情報と命令を格納するための任意の静的記憶装置を含むことができる。
【0030】
状態監視システム140は、機械120a、120bのそれぞれに関連する性能データを解析するように構成されてよい。一実施形態によると、状態監視システム140は、それぞれの機械に関連する閾値(これらは工場設定であってもよいし、製造者推奨であってよいし、および/またはユーザ設定であってもよい)に基づいて1つまたは複数の機械120a、120bに関連する性能データを解析するための診断ソフトウェアを含むことができる。例えば、状態監視システム140に関連する診断ソフトウェアは、特定の機械から受信されたエンジン温度測定値と所定の限界エンジン温度とを比較することができる。測定されたエンジン温度が限界温度を越えた場合、状態監視システム140は、警報を発生し、機械オペレータ、現場管理者、修理技術者、配送係、または他の任意の適任者または適正エンティティのうちの1つまたは複数に通知することができる。
【0031】
別の実施形態によると、状態監視システム140は1つまたは複数の機械120a、120bに関連する生産性を監視し解析するように構成されてよい。例えば、状態監視システム140は、それぞれの機械に関連するユーザ定義の生産性閾値に基づき1つまたは複数の機械120a、120bに関連する性能データを解析する生産性ソフトウェアを含むことができる。生産性ソフトウェアは、それぞれの機械120a、120bに関連する生産性レベルを監視するとともに、オペレータまたは機械の生産性データを定期的に受け取るプロジェクト管理者、機械オペレータ、修理技術者、または他の任意のエンティティ(例えば、人事部、オペレータ訓練・認証事業部等)のために生産性報告を生成するように構成されてよい。例示的な一実施形態によると、生産性ソフトウェアは、機械に関連する生産性レベル(例えば、特定の機械により移動された材料の量)とそれぞれの機械に対し設定された所定生産性割り当てとを比較することができる。生産性レベルが所定割り当て未満であった場合、機械の生産性不足を示す生産性通知を生成して機械オペレータおよび/またはプロジェクト管理者に提供することができる。
【0032】
状態監視システム140は、1つまたは複数の他のバックエンドシステムとデータ通信を行ってもよいし、詳細解析のためにある性能データをこれらのシステムに配信するように構成されてよい。例えば、状態監視システム140は、トルク推定器150に通信で結合されてもよいし、機械駆動軸に関連する性能データをトルク推定器150に提供するように構成されてもよい。代替案としてまたは追加として、状態監視システム140は性能シミュレータ160とデータ通信を行ってもよいし、詳細解析のために性能データを性能シミュレータ160に提供するように構成されてもよい。トルク推定器150と性能シミュレータ160は、状態監視システム140の外部のスタンドアロンシステムとして例示されたが、トルク推定器150と性能シミュレータ160の内の1つまたは両方は状態監視システム140のサブシステムとして含まれてよいと考えられる。
【0033】
トルク推定器150は、状態監視システム140からある性能データを受信/収集し、受信された性能データに基づき1つまたは複数の機械120a、120bに関連する駆動軸トルクを決定するように構成されたハードウェアまたはソフトウェアモジュールを含むことができる。トルク推定器150はトルクセンサ121aにより収集された性能データに基づき駆動軸トルクを決定するように構成されてよい。代替案としてまたは追加として、駆動軸トルクは、機械の性能データと既知の設計パラメータとに基づいて推定されてよい。例えば、エンジン動作速度と作動ギアとに基づき、トルク推定器150は電子参照テーブルにアクセスし、この参照テーブルを使用して特定の積載重量における機械の駆動軸トルクを推定することができる。
【0034】
推定機械駆動軸トルクが決定されると、トルク推定器150は1つまたは複数の機械の有効積算勾配を推定することができる。例えば、トルク推定器150は、次のような有効積算勾配(TEG:total effective grade)値を推定することができる。
【0035】
【数1】
【0036】
式中、RPは機械牽引力を指し、GMWは総機械重量を指し、MAは機械の加速を指し、AGはその機械が位置する地形の実際勾配を指す。搭載データ監視装置121を使用して総機械重量と機械加速を監視することができる。機械に関連する監視GPSデータに基づき実際勾配を推定することができる。例えば、搭載GPS装置から集められた高精度GPSデータから導出される機械の緯度、経度および高度に基づいて実際勾配を決定することができる。一実施形態によると、位置の垂直変化(GPSデータに関連する高度データに基づく)と位置の水平変化(GPSデータに関連する緯度と経度のデータに基づく)との比を計算することにより実際勾配を決定することができる。代替案としてまたは追加として、実際勾配は、例えば傾斜計等の搭載データ監視装置を使用して計算されてよい。牽引力は次のように決定することができる。
【0037】
【数2】
【0038】
式中、DATは機械駆動軸に加えられるトルクを指し、LPTRは低パワートレイン減少係数を指し、PTEはパワートレインの効率を指し、TDRRはタイヤの動的回転半径を指す。牽引力の実時間計算中にギアの変化を監視することにより低パワートレイン減少を決定することができる。機械から収集された実時間性能データに基づきパワートレイン効率を計算することができる。監視されたタイヤ空気圧、速度および総機械重量に基づきタイヤ動的回転半径を推定することができる。
【0039】
有効積算勾配が決定されると、トルク推定器150は1つまたは複数の機械120a、120bに関連する転がり抵抗を決定することができる。転がり抵抗値は次のように計算することができる。
RR=TEG−(AG+EL) (式3)
式中、ELは機械の効率損失を指す。効率損失は、入力電力効率と出力電力効率との差として推定することができ、特定のエンジン動作速度と荷重条件における経験的な試験データに基づいて推定することができる。説明したように、実際勾配は、収集されたGPSデータに関連する計算に基づき決定することができ、および/または搭載傾斜計を使用して監視することができる。
【0040】
性能シミュレータ160は、様々な動作または環境条件下の機械120a、120bの性能をシミュレートするように構成されてよい。模擬性能結果に基づいて、性能シミュレータ160は、機械120a、120bおよび/または作業環境100の所望の性能を達成するための1つまたは複数の機械動作条件(例えば、速度、ギア選択、エンジンRPM等)、および/または運搬道路パラメータ(例えば、実際勾配、転がり抵抗、表面密度、表面摩擦等)を決定することができる。
【0041】
性能シミュレータ160は、部品または機械シミュレーションソフトウェアを含む任意のタイプのコンピュータシステムであってよい。シミュレーションソフトウェアは、機械の実時間動作から収集された経験的なデータに基づいて機械またはその構成部品の任意のものに対応する解析モデルを構築するように構成されてよい。モデルが構築されると、性能シミュレータ160は、特定の動作条件(例えば、荷重条件、環境条件、地形条件、運搬経路設計条件等)下でモデルを解析し、特定条件に基づき機械の模擬性能データを生成することができる。
【0042】
一実施形態によると、性能シミュレータ160は、それぞれの機械120a、120bに関連する理想設計モデルを含むことができる。これらの理想モデルは、理想性能データ(すなわち、(理想動作条件下で)設計されるような機械の性能に基づくデータ)を生成するために電子的にシミュレートされてよい。機械が老化するにつれ機械に関連する部品が通常の摩耗、ストレス、および/または動作中の機械に対する損傷により非理想的振る舞いを呈し始め得ることを当業者は認識するであろう。これらの非理想に合致するより現実的な性能シミュレーションを提供するために、理想モデルは、機械120a、120bから収集された実際の性能データに基づいて編集されてよく、こうしてそれぞれの機械および/またはその個々の部品の実際的または経験的モデルを生成することができる。
【0043】
性能シミュレータ160はまた、機械120a、120bのそれぞれに関連する実際の性能ベースのモデルを含むことができる。上記理想設計モデルと同様に、これらの性能ベースのモデルは様々な実際の動作条件下で機械の性能と生産性を予測するために電子的にシミュレートされてよい。しかしながら、上記理想モデルとは対照的に、性能シミュレータは各機械に特有の特定の動作条件に基づき性能ベースのモデルを生成するように構成されてよい。性能シミュレータ160は、各模擬条件に関連する速度、トルク出力、エンジン状態、燃料消費速度、運搬経路完成時間等を決定するために様々な機械動作条件下で運搬車120bの実際のモデルをシミュレートすることができる。代替案としてまたは追加として、性能シミュレータ160は、所望閾値動作範囲内で1つまたは複数の機械を動作させる運搬道路パラメータを特定するために、運搬道路面に関連する様々な物理条件(例えば、勾配レベル、摩擦レベル、平滑度、密度、硬度、水分含有量等)下で運搬車120bの実際のモデルをシミュレートするように構成されてよい。それゆえ、性能シミュレータ160は、運搬道路上で操作される1つまたは複数の機械に関連する実際の性能データに基づき運搬道路設計をカスタマイズするための解決策を鉱山オペレータと運搬道路設計者に提供することができる。
【0044】
性能シミュレータ165は、予想的な運搬道路設計に関連する運搬道路パラメータ155を受信するように構成されてよい。例えば、見込みの鉱山環境のための運搬道路の設計に先立って、性能シミュレータ165は加入者170から1つまたは複数の運搬道路パラメータ155を受信することができる。運搬道路パラメータ155は、例えば、運搬道路開始点(例えば、鉱石貯蔵場における);運搬道路終点(例えば、輸送または処理施設における);初期の運搬道路勾配;予備運搬道路の経路;運搬道路予算;あるいは、運搬道路を設計する際に加入者170により定義されてよい他の任意のパラメータ等の運搬道路を設計するのに使用し得る任意のパラメータを含むことができる。
【0045】
性能シミュレータ160は、ユーザが様々な運搬道路設計条件下で1つまたは複数の機械に対応する理想および/または性能ベースのソフトウェアモデルをシミュレートできるように構成されてよい。例えば、運搬車に関連するソフトウェアモデルを使用して、性能シミュレータ160は、運搬車に提示される有効積算勾配および/または転がり抵抗を変化させることにより複数の運搬道路勾配における運搬車の動作をシミュレートすることができる。上記式を使用して、性能シミュレータは、運搬車に提示される各有効積算勾配および/または転がり抵抗値に対応する実際勾配を決定し、1つまたは複数の運搬道路設計に関連する道路勾配に基づいて機械性能の傾向を特定することができる。加入者170は、機械の模擬性能が所望性能特性を呈するところの勾配率を特定することにより運搬道路設計の実際勾配を選択することができる。例えば、燃料消費量を最小化することが優先事項である鉱山環境では、性能シミュレータ160は、機械に最小量の燃料を消費させる運搬道路勾配を特定することができる。代替案としておよび/または追加として、部品寿命を延長することにより機械維持および修繕費を制限することが重大である鉱山環境では、性能シミュレータ160は、機械の駆動系に対し最小量の応力および歪を生成する運搬道路勾配を特定することができる。
【0046】
運搬道路勾配に加えて、性能シミュレータ160はまた、他の運搬道路条件下で運搬車の動作をシミュレートするように構成されてよい。例えば、転がり抵抗は、運搬道路面密度、水分レベル、および摩擦に依存し得るタイヤおよび/または変速機スリップにより影響を受けると考えられる。したがって、性能シミュレータ160は、機械の所望性能レベルを特定するために、機械に提示された転がり抵抗レベルを変化させることにより1つまたは複数の機械の性能をシミュレートすることができる。
【0047】
所望機械性能および所望性能に関連する転がり抵抗値が特定されると、性能シミュレータ160は所望の機械性能と転がり抵抗に適合する1つまたは複数の運搬道路設計を生成することができる。例えば、性能シミュレータ160は、特定の運搬道路勾配に対して所望機械性能を機械に達成させるように、運搬道路勾配に対する特定の運搬道路面密度、摩擦、および最大許容水分レベルを規定することができる。これらのパラメータは機械の所望勾配レベルに依存して調整されてよい。したがって、勾配レベルが増加することによりタイヤおよび/または変速機スリップの可能性を増加させるので、運搬道路面密度、摩擦および最大許容水分レベルは勾配レベル増加を補うように調整されてよい。
【0048】
性能シミュレータ160は、異なる運搬道路設計間の費用対効果関係を決定するように構成されてよい。例えば、運搬道路勾配を増加させることにより、運搬道路の必要な長さを短縮させ、可能性として運搬道路建設および維持費を低減することができる。しかしながら運搬道路の勾配の増加は、機械駆動系にかかり得る応力と歪の増加により機械維持および修繕費の増加をもたらすかもしれない。さらに、タイヤおよび/変速機スリップはより険しい勾配上で頻繁に発生し得るので、運搬道路の長さの短縮の結果としての運搬道路建設費の節約は、スリップを低減することを目的とした運搬道路の調整(例えば、運搬道路面密度を増加させる、土壌中の過剰水分を制限するために運搬道路排水を増加するなど)に伴う費用の増加により相殺されるかもしれない。性能シミュレータ160は、異なる各運搬道路設計に関連する潜在的な費用対効果をコンパイルすることができる。
【0049】
性能シミュレータ160はまた、部品故障を予測しおよび/または機械の特定部品またはサブシステムの残り寿命を推定するために、実際の機械モデル(すなわち、実際の機械データから導出または生成されたモデル)をシミュレートする診断および/または予後シミュレーションツールを含むことができる。例えば、エンジンおよび/または変速機に関連する性能データに基づき、性能シミュレータ160は、エンジン、駆動系、差動ブレーキ、あるいは機械の他の部品またはサブシステムの残り寿命を予測することができる。したがって、性能シミュレータ160は、1つまたは複数の運搬道路パラメータの変化が1つまたは複数のこれらの部品の寿命にどのように影響を与え得るかを予測することができる。例えば、性能シミュレータ160は、特定の運搬道路区間の勾配が1.5%低減されることによりエンジン、変速機および/または駆動系への歪を低減した場合に駆動系の残り寿命が15%増加し得るということを推定することができる。性能シミュレータ160は、鉱山オペレータ、プロジェクト管理者、機械オペレータ、および/または作業環境100の保守部門にこのデータを定期的に報告することができる。
【0050】
例示的な一実施形態によると、状態監視システム140および/または性能シミュレータ160の1つまたは複数は、運搬経路の一部分に関連する性能データの傾向を監視するように構成されてよい。例えば、性能シミュレータ160は、運搬経路上で動作する1つまたは複数の機械に関連する実時間の有効積算勾配を監視するように構成されてよい。高精度GPSデータを使用して、性能シミュレータ160は、実時間の有効積算勾配データと有効積算勾配データが収集された時の機械の特定の位置とを関連付けることができる。性能シミュレータ160は、監視された有効積算勾配データの傾向を特定するとともに、1つまたは複数の機械の性能を不必要に制限し得る運搬経路に関る潜在的問題を特定するためにこれらの傾向と運搬経路の特定の部分とを関連付けるように構成されてよい。
【0051】
別の例によると、性能シミュレータ160は、機械120a、120bが運搬経路作業中に過剰回数のギアチェンジをいつ行うかを判断することにより運搬道路条件に起因する1つまたは複数の機械120a、120bに関連する性能不足を検知するように構成されてよい。性能シミュレータ160は、運搬経路の特定の部分に対応する1つまたは複数の機械120a、120bに関連するギアチェンジ(例えば、低速への切り替え、高速への切り替え等)の回数を監視し記録するように構成されてよい。性能シミュレータ160は1つまたは複数の運搬経路区間に関連するギアチェンジの平均回数を計算するように構成されてよい。性能シミュレータ160は、さらなる性能シミュレーションおよび/または解析のために、閾値許容レベルを越えるギアチェンジの平均回数を有する運搬経路の区間を特定することができる。
【0052】
性能シミュレータ160は性能シミュレーションの結果および/または運搬道路設計データを出力するように構成されてよい。例えば、性能シミュレータ160は、状態監視システム140に関連する表示装置147を介し性能シミュレーション結果および/または運搬道路設計データを出力することができる。代替案としておよび/または追加として、性能シミュレータ160は作業環境100に関連する運搬道路設計概要165を生成することができる。運搬道路設計概要165は、シミュレーション中に使用した、異なる有効積算勾配レベルおよび/または転がり抵抗値に対応する性能シミュレーション結果を含むことができる。運搬道路設計概要165はまた、性能シミュレータ165によりコンパイルされた各運搬道路設計に対する任意の費用対効果データも含むことができる。費用対効果データは、履歴または以前の運搬道路設計プロジェクトから集められたデータに基づいてよい。性能シミュレータ160は、1人または複数の加入者170に運搬道路設計概要165を配信するように構成されてよい。
【0053】
性能シミュレータ160は、運搬経路設計データの1人または複数の指定加入者170に運搬道路設計概要165を提供することができる。加入者170は例えば、プロジェクト管理者、鉱山所有者、あるいは運搬道路設計概要165を受信するように指定してよい他の任意の人物またはエンティティ等の運搬道路設計顧客を含むことができる。
【0054】
状態監視システム140、トルク推定器150、および/または性能シミュレータ160の1つまたは複数は、単一の統合型ソフトウェアパッケージまたはハードウェアシステムとして含まれてよいと考える。代替案としてまたは追加として、これらのシステムは、他のシステムの1つまたは複数の動作を容易にするように相互作用または協働するように構成された個別のスタンドアロンモジュールを具現することができる。例えば、トルク推定器150は性能シミュレータ160とは別のスタンドアロンシステムとして図示され説明されたが、トルク推定器150は、性能シミュレータ160と同じコンピュータシステム上で動作するように構成されたソフトウェアモジュールとして含まれてもよいと考えられる。
【0055】
本開示の実施形態による処理と方法は、ネットワーク接続された工事現場のデータ収集能力を、運搬道路上で操作される1つまたは複数の機械の性能に基づいて運搬道路を設計する機械性能シミュレーションソフトウェアで梃入れする対話型解決策を提供することができる。本開示の運搬道路設計システムは、鉱山オペレータが、運搬道路上で操作される機械の特定の動作特性だけでなくいくつかの所望の設計優先度に基づいて運搬道路設計もカスタマイズすることを可能にする解決策を提供することができる。その結果、本明細書に記載のシステムと方法を採用する鉱山オペレータは、特定の機械性能と運搬経路生産性目標をより効果的に達成するように運搬道路設計を調整することができる。図3と図4に、フローチャート300と400をそれぞれ示す。各図は、運搬道路管理システム135を使用して実施することができる運搬道路設計の例示的な方法を示す。
【0056】
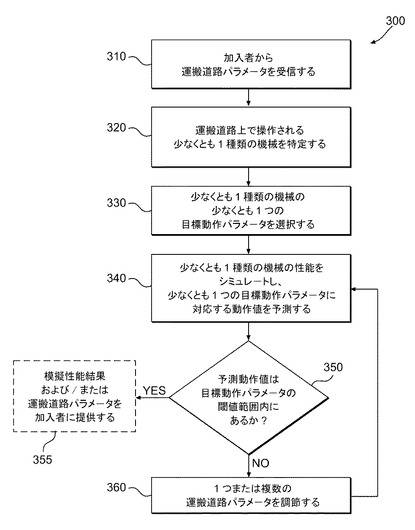
図3には、機械性能に基づいて運搬道路を設計する例示的な方法を示すフローチャート300を示す。本方法は、加入者170から運搬道路パラメータ155を受信すると開始することができる(工程310)。一実施形態によると、性能シミュレータ160は、加入者170が1つまたは複数の運搬道路パラメータを入力または定義することを可能にするインターフェースを提供することができる。性能シミュレータ160は、ユーザにより選択され得る1つまたは複数のよく知られた運搬道路設計パラメータの対話型チェックリストを含むグラフィックインターフェースを提供することができる。上記のように、運搬道路パラメータは運搬道路の設計に関連する任意の所望のパラメータを含むことができる。運搬道路パラメータの非限定的な例としては、運搬道路開始点または終点に関連するGPS座標、初期の運搬道路勾配、予備運搬道路の経路および/または長さ、運搬道路予算、1つまたは複数の機械に関連する運搬道路完成時間、あるいは運搬道路を設計する際に加入者170により定義されてよい他の任意のパラメータを挙げることができる。
【0057】
性能シミュレータ160は、加入者170により提供される初期の運搬道路パラメータに基づき初期の運搬道路設計を生成するように構成されてよい。例えば、運搬道路開始点および終点に対応するGPSデータに基づき、性能シミュレータ160は初期の運搬道路設計を生成することができる。初期の運搬道路設計は、初期の運搬道路勾配、経路、長さ、表面密度、土壌水分レベル、平均動作速度等を含むことができる。この初期の運搬道路設計は運搬道路設計シミュレーションの出発点となる。
【0058】
1つまたは複数の所望の運搬道路パラメータが定義されると、運搬道路上で操作される少なくとも1種類の機械を特定することができる(工程320)。例えば、性能シミュレータ160は、ユーザに、鉱山環境において一般に操作される機械のリストから運搬道路上で操作される機械の種類と数量を選択するように指示することができる。あるいは、性能シミュレータ160は、運搬道路上で操作される1つまたは複数の実際の機械に関連する性能データをアップロードすることにより、加入者170が1つまたは複数の機械を特定できるようにする。
【0059】
性能シミュレータ160は、ユーザに、運搬道路上で操作される少なくとも1つの機械それぞれについて、少なくとも1つの目標動作パラメータを選択するように指示することができる(工程330)。本明細書で使用される用語「目標動作パラメータ」は、その値が性能シミュレーション結果を解析するためのベンチマークとして設定されてよい任意の機械パラメータまたは運搬道路パラメータを指す。例えば、目標動作パラメータは、燃料消費量レベル、温室効果ガス排出レベル、経路完成時間、部品寿命、転がり抵抗、有効積算勾配、回転速度、または機械対地速度のうちの1つまたは複数を含む。一実施形態によると、性能シミュレータ160は各機械に関連する性能パラメータのリストを加入者170に提供することができる。加入者170は機械の1つまたは複数の性能パラメータを選択することができ、これにより選択したパラメータを性能シミュレータ160内の目標パラメータとして指定できる。加入者170は指定の各目標パラメータの閾値許容範囲を設定することができる。これらの目標パラメータおよび関連する閾値範囲は、所望の機械または運搬道路の性能条件が満たされたということ示すための機械性能シミュレーション中、指定の収束点として性能シミュレータ160により使用される。例えば、ユーザは目標動作パラメータとして燃料消費量を指定し、運搬道路上で動作中の機械の燃料消費量の閾値許容範囲を規定することができる。したがって、性能シミュレータ160は機械性能を繰り返しシミュレートし、予測燃料消費速度が閾値許容範囲内に入るようにする運搬道路パラメータが選択されるまで運搬道路設計パラメータを調整することができる。
【0060】
目標パラメータおよび目標パラメータに関連する閾値範囲が設定されると、性能シミュレータ160は、運搬道路上で操作されるように選択された機械の性能をシミュレートし、各目標動作パラメータに対応する動作値を予測することができる(工程340)。上記例に従って、性能シミュレータ160は、初期の運搬道路設計パラメータ下で1つまたは複数の機械の性能をシミュレートし、運搬道路上で操作される機械のそれぞれに関連する燃料消費速度を予測することができる。
【0061】
性能シミュレータは、運搬道路設計パラメータが機械および/または運搬経路の所望の性能の達成につながるかどうかを判断するために予測動作値と目標動作パラメータとを比較することができる(工程350)。特に、目標動作パラメータのそれぞれに対応する予測動作値が加入者170により定義された閾値範囲内にある(選択された運搬道路パラメータがユーザ定義の性能パラメータに一致することを示す)場合、性能シミュレータ160は模擬性能結果および/または運搬道路パラメータを加入者170に提供することができる(工程355)。
【0062】
一方、目標動作パラメータに対応する予測動作値が指定の閾値範囲に入らない(運搬道路設計パラメータがユーザ定義の性能指針を満足しないかもしれないことを示す)場合、性能シミュレータ160は運搬道路設計パラメータの1つまたは複数を調整することができる(工程360)。例示的な一実施形態によると、性能シミュレータ160は、過去のシミュレーションから傾向を認識し、どの運搬道路パラメータが所望の性能ベンチマークを満足することに最大の影響を及ぼし得るかを自動的に決定する適応収束ソフトウェアを含むことができる。運搬道路パラメータが調整されると、処理は、調整された運搬道路設計パラメータ下で機械の動作を再シミュレートする工程340に進むことができる。ユーザ定義の目標パラメータに関連する性能要件を満たすまで工程340〜360を繰り返してよいと考えられる。
【0063】
図4には、運搬道路上で操作される1つまたは複数の機械に関連する実際の性能データに基づき運搬道路に関連する実際勾配を決定するための例示的な方法を示すフローチャート400を示す。本方法は少なくとも1つの機械の目標動作パラメータを定義する工程(工程410)を含むことができる。上記のように、性能シミュレータ160は特定の機械に関連する動作パラメータのリストを加入者170に提供することができる。性能シミュレータ160は、加入者170によって選択された1つまたは複数の動作パラメータを検知し、これらのパラメータを目標動作パラメータとして指定することができる。性能シミュレータ160はまた、加入者170に、各目標動作パラメータに対応する閾値範囲を定義するように指示することができる。
【0064】
目標動作パラメータおよび対応する閾値範囲が定義されると、少なくとも1つの機械の性能をシミュレートすることができる(工程420)。例示的な一実施形態によると、性能シミュレータ160は、少なくとも1つの機械に対し提示された有効積算勾配値を変化させることにより少なくとも1つの機械の性能をシミュレートし、各模擬有効積算勾配値における機械の性能を監視することができる。
【0065】
性能シミュレータ160はシミュレーションに基づき目標動作パラメータの予測動作値を生成することができる(工程430)。例えば、加入者170が目標動作パラメータとして運搬道路駆動系寿命を指定した場合、性能シミュレータ160はそれぞれの機械の模擬性能に基づき少なくとも1つの機械のそれぞれの駆動系寿命を予測することができる。
【0066】
性能シミュレータ160は、目標動作パラメータの閾値範囲内に予測動作値が入るようにする有効積算勾配値を特定することができる(工程440)。上記例に従って、性能シミュレータ160は、加入者170によって設定された閾値寿命範囲内に駆動系寿命が入るようにする有効積算勾配を特定することができる。
【0067】
許容可能な有効積算勾配値が特定されると、性能シミュレータ160は有効積算勾配値に対応する実際勾配値を決定/計算することができる(工程450)。例えば、式(1)を使用して、所与の有効積算勾配、機械重量、機械加速、および牽引力に対する実際勾配を決定/計算することができる。性能シミュレータ160は続いて運搬道路設計概要165を生成し、1人または複数の加入者170に設計概要を提供することができる(工程460)。説明したように、運搬道路設計概要165は、複数の有効積算勾配値の条件下の模擬機械性能と、有効積算勾配値のそれぞれに関連する実際勾配データとを含むことができる。
【産業上の利用可能性】
【0068】
開示された実施形態に関連する方法とシステムは、特定のユーザ定義の運搬道路パラメータおよび性能目標に基づいて運搬道路を設計するための解決策を提供する。本明細書に記載のシステムと方法はまた、機械の性能への運搬道路設計の影響を判断するために、ユーザが性能ベースの機械モデルをシミュレートすることにより運搬道路改修提案を試験することを可能にする。本明細書に記載の処理と特徴を採用する作業環境は、加入者が運搬道路パラメータを定義し、運搬道路パラメータと実際の機械性能データに基づいて運搬道路設計を効率的に作成することを可能にするシステムを提供する。その結果、各運搬道路設計を、運搬道路上で操作される特定の機械の性能に基づいて加入者の特定の機械性能目標に合わせることができる。
【0069】
開示された実施形態は鉱山環境における運搬道路条件を改善することに関連して説明されたが、これらの実施形態は、道路上で操作される機械の性能に基づいて道路を設計することが有利と考えられる任意の環境に適用可能である。一実施形態によると、運搬道路条件を改善するための本開示のシステムと方法は、一団の機械に関連する性能データを監視しこれら一団の機械に関する潜在的問題を診断するネットワーク接続された工事現場環境の一部として実施されてよい。その結果、本明細書に記載のシステムと方法は、1つまたは複数の機械の性能を監視し運搬道路上で操作される特定の機械の性能に基づいて運搬道路を設計するための統合システムを提供することができる。
【0070】
運搬道路を設計するための本開示のシステムと方法はいくつかの利点を有すると考えられる。例えば、本明細書に記載のシステムと方法は、運搬道路上で操作される1つまたは複数の特定の機械に関連する性能データに基づいて運搬道路設計を自動的に生成し試験するための解決策を提供する。その結果、本運搬道路設計は、運搬道路上で操作される1つまたは複数の機械の効率的な性能を達成するように特に調整されてよい。
【0071】
さらに、本開示の運搬道路設計システムは著しい費用優位性を有すると考えられる。例えば、設計される運搬道路のパラメータに基づいて1つまたは複数の機械の性能をシミュレートすることにより、本開示のシステムは、設計の変更が建設費と建設遅れを著しく増やし得る場合、運搬道路の建設を始める前に設計提案が目標性能要件を満たすことをユーザが確実にできるようにする。
【0072】
本開示の範囲から逸脱することなく、運搬道路を設計する本開示のシステムと方法に対し様々な変形と修正をなし得ることは当業者に自明である。本開示の他の実施形態は本明細書の考察と本開示の実行から当業者に自明である。本明細書と例はあくまで例示的であると考えられ、本開示の真の範囲は以下の特許請求の範囲およびそれらの均等物により示されることを意図している。
【技術分野】
【0001】
本開示は、一般には運搬道路の設計に関し、より詳細には運搬道路上で操作される機械の性能に基づき運搬道路を設計するためのシステムと方法に関する。
【背景技術】
【0002】
運搬道路設計は多くの作業環境の効率と生産性における重要な側面である。特に重機を採用する作業環境における低品質の運搬道路設計は、道路上で動作する機械の遅くかつ非効率な性能をもたらすだけでなく、機械駆動系部品に対する過度の応力と歪の潜在的な原因となり得る。これは重い貨物を運ぶ機械にとっては特に有害であろう。
【0003】
コンピュータが広範に使用されるようになる前、運搬道路設計は、設計が構造的に適切であることを保証するために、高度な訓練を受けた工学専門家と建設要員の専門知識を必要とする比較的集約的な手作業処理であった。この設計工程は労働および時間集約的であるだけでなくかなり高価であった。これは、設計を生成するとともに設計の適合性を必須標準規格および規則のすべてにより検証するために多くの工数が必要とされたからである。
【0004】
コンピュータの発展後、特殊なコンピュータ支援設計(CAD)ソフトウエアプログラムが技術者と建設専門家に、運搬道路の設計を支援するツールを提供した。コンピュータの処理能力を活用することにより、これらのCADプログラムの多くは設計に伴う複雑な構造計算をわずか数秒内に行うことができた。これらのCADプログラムは結果として著しい時間節約になるだけでなく、手作業計算技術に伴うヒューマンエラーの可能性を減らし、結果としてより信頼できる設計をもたらした。
【0005】
多くの処理および計算機能の効率的性能に加えて、これらのCADツールはまた、運搬経路のレイアウトと、運搬道路青写真および建設パッケージの生成と、建設に先立つ運搬道路設計の試験/解析と、を支援するインターフェースを提供した。これら従来のCADツールは、解析、マッピングおよび設計の下図作成等の運搬道路の設計後の必須周辺機能の多くを行う解決策を提供することにより運搬道路設計を大いに単純化したが、運搬道路設計を作成または開発するのに十分には洗練されていなかった。したがって、複雑でかつ高度に専門化した手作業の運搬道路設計技術への依存性を低減するためには、ユーザ定義の設計パラメータに基づき運搬道路設計を生成する対話型ソフトウェアツールが必要と考えられる。
【0006】
少なくとも1つのこのような対話型道路設計ソフトウェアツールは山本による(特許文献1)に記載されている。(特許文献1)には、ユーザ定義の設計条件を受信し、設計条件と適用可能なあらゆる道路設計規則および標準に従って道路設計を生成し、道路設計の3次元コンピュータ処理レンダリングを出力するソフトウェアベースの道路設計システムが記載されている。ソフトウェアベースの道路設計システムはまた、複数のユーザがインターネットまたは他の共有ネットワークを介し設計システムにアクセスしそれを操作できるようにする複数のクライアントシステムにネットワーク接続される。
【0007】
(特許文献1)に記載されたものなどのいくつかの従来の道路設計ツールは、ユーザ定義の道路設計パラメータに基づき道路設計を生成するソフトウェアシステムを提供することができるが、これらはいくつかの欠点を有すると考えられる。例えば、従来のソフトウェア設計システムは、道路設計における個々の機械または一群の機械の特定の性能パラメータを考慮することができない。多くの種類の重機は最も効率的に働く特定の動作領域を有するので、機械の性能を考慮しない従来システムにより設計された運搬道路は機械の効率と生産性を制限することがある。
【0008】
また、多くの作業環境は特定の性能目標を達成するように設計された運搬道路を必要とすることがある。例えば、燃料価格高騰および/または排出基準により燃料消費量が考慮される鉱山環境では、運搬道路上で操作される機械の燃料消費量の最小化につながる運搬道路を設計することは有利であろう。しかしながら、(特許文献1)に記載されたシステムを含む従来の道路設計システムの多くは個々の機械または一群の機械の特定の性能パラメータを考慮することができないので、運搬道路設計者は道路設計が特定の機械群の所望燃料消費量要件を満たすのに有効かどうかを判断することができない。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】米国特許出願公開第2002/0010569号明細書
【発明の概要】
【発明が解決しようとする課題】
【0010】
運搬道路を設計するための本開示のシステムと方法は、上に述べられた問題の1つまたは複数を克服することに関する。
【課題を解決するための手段】
【0011】
一態様によると、本開示は機械性能に基づき運搬道路を設計する方法に関する。本方法は1つまたは複数の運搬道路パラメータを受信する工程と運搬道路上で操作される少なくとも1種類の機械を特定する工程とを含む。少なくとも1種類の機械に関連する少なくとも1つの目標動作パラメータを選択することができ、少なくとも1つの目標動作パラメータに対応する動作値を予測するために少なくとも1種類の機械の性能をシミュレートすることができる。予測動作値が対応する目標動作パラメータの閾値範囲内にない場合、1つまたは複数の運搬道路パラメータを調整することができる。
【0012】
別の態様によると、本開示は、運搬道路上で操作される1つまたは複数の機械に関連する性能データに基づき運搬道路の実際勾配をカスタマイズする方法に関する。本方法は、少なくとも1つの機械の目標動作パラメータを定義する工程と、シミュレーションに基づき目標動作パラメータの予測動作値を生成するために少なくとも1つの機械に関連する有効積算勾配値(total effective grade value)を変化させることにより少なくとも1つの機械の性能をシミュレートする工程と、を含む。予測動作値を目標動作パラメータの閾値範囲内に入るようにさせる有効積算勾配値を特定することができ、有効積算勾配値に関連する実際勾配を決定することができる。本方法はまた、1つまたは複数の模擬性能結果と実際勾配データを含む運搬道路設計概要を生成する工程を含むことができる。
【0013】
さらに別の態様によると、本開示は運搬経路管理システムに関する。本システムは、加入者から1つまたは複数の運搬道路パラメータを受信するとともに運搬道路上で操作される少なくとも1種類の機械に関連する性能データを受信するように構成される入力装置を含むことができる。本システムはまた、入力装置に通信で結合される性能シミュレータを含むことができる。性能シミュレータは、少なくとも1種類の機械の少なくとも1つの目標動作パラメータに対応する閾値範囲を設定し、1つまたは複数の初期の運搬道路パラメータと少なくとも1つの目標動作パラメータとに基づき初期の運搬道路設計を生成するように構成されてよい。性能シミュレータはまた、少なくとも1つの目標動作パラメータのそれぞれに対応する動作値を予測するために、初期の運搬道路設計を使用して少なくとも1種類の機械の性能をシミュレートするように構成されてよい。1つまたは複数の運搬道路パラメータは、対応する目標動作パラメータの閾値範囲内に予測動作値がない場合、第2の運搬道路設計を生成するように調整されてもよい。
【図面の簡単な説明】
【0014】
【図1】本開示実施形態による例示的な作業環境を示す図である。
【図2】図1の作業環境に関連するある部品を説明する概略図である。
【図3】ある開示実施形態による、運搬道路上で操作される1つまたは複数の機械の模擬性能に基づいて運搬道路を設計するための例示的な方法を示すフローチャートである。
【図4】ある開示実施形態による、運搬道路上で操作される1つまたは複数の機械から収集される性能データに基づいて運搬道路勾配をカスタマイズするための例示的な実施形態を示すフローチャートである。
【発明を実施するための形態】
【0015】
図1には、本開示実施形態による例示的な作業環境100を示す。作業環境100は、採鉱、建設、エネルギー探査および/または生成、製造、輸送、農業等の商業的または工業的タスク、あるいは他の産業タイプに関連する任意のタスクを実行するように協働するシステムと装置を含むことができる。図1に示す例示的な実施形態によると、作業環境100は、通信ネットワーク130を介し運搬経路管理システム135に結合される1つまたは複数の機械120a、120bを含む採鉱環境を含むことができる。作業環境100は、1つまたは複数の機械120a、120bの状態、健全性および性能に関連する情報を監視、収集、フィルタ処理するとともに、この情報を運搬経路管理システム135および/または加入者170等の1つまたは複数のバックエンドシステムまたはエンティティに配信するように構成されてよい。追加の部品および/または上に掲載されたものとは異なる部品を作業環境100内に含んでよいと考えられる。
【0016】
図1に示すように、機械120a、120bは1つまたは複数の掘削機120aと1つまたは複数の輸送機械120bを含むことができる。掘削機120aは、鉱山から材料を取り出すとともにその材料を1つまたは複数の輸送機械120b上に載せるように構成された任意の機械を具現することができる。掘削機120aの非限定的な例としては、バケツタイプ掘削機、電磁気式リフト装置、バックホウローダ、ブルドーザ等が挙げられる。輸送機械120bは、例えば連接台車、ダンプカー、または材料を輸送するように構成された他の任意のトラックなど作業環境100内で材料を輸送するように構成された任意の機械を具現することができる。図1に示す機械の数、大きさおよびタイプはあくまで例示的であり、限定することを意図していない。したがって、作業環境100は、追加の部品、上に掲載されたものより少ない部品および/またはそれとは異なる部品を含んでよいと考えられる。例えば、作業環境100は、スキッドステアローダ、トラックタイプトラクタ、材料移動車両、または作業環境100の事業に寄与し得る他の好適な固定または移動式機械を含むことができる。
【0017】
一実施形態では、機械120a、120bのそれぞれは、機械120a、120bの1つまたは複数の部品に関連する情報を監視、収集、および/または配信するための搭載データ収集および通信装置を含むことができる。図2に示すように、機械120a、120bはそれぞれ、特には、通信線122を介し1つまたは複数のデータ収集器125に結合されたセンサまたは電子制御モジュール等の1つまたは複数の監視装置121;1つまたは複数の送受信器装置126;および/または機械120a、120bの操作に関連する情報を監視、収集および通信するための他の部品を含むことができる。機械120a、120bのそれぞれはまた、運搬経路管理システム135等の非搭載システムから情報、警報信号、オペレータ命令、または他のメッセージまたは命令を受信するように構成されてよい。上記部品は例示的であって、限定することを意図していない。したがって、本開示実施形態は、機械120a、120bのそれぞれが追加部品および/または上に掲載されたものとは異なる部品を含むことを想定している。
【0018】
監視装置121は、1つまたは複数の機械120a、120bに関連する性能データを収集するための任意の装置を含むことができる。例えば、監視装置121は、エンジンおよび/または機械の速度および/または場所;流体圧力、流速、温度、汚染レベル、および/または流体の粘度;電流および/または電圧レベル;流体(すなわち、燃料、油等)消費速度;荷重レベル(すなわち、積載値、最大積載量限界のパーセント値、積載量履歴、積載量分布等);変速機出力比、スリップ等;運搬勾配と牽引データ;駆動軸トルク;計画され実行される保全および/または修理作業の間隔;および機械120a、120bの他の動作パラメータ等の、動作パラメータを測定するための1つまたは複数のセンサを含むことができる。
【0019】
一実施形態では、輸送機械120bはそれぞれ、駆動軸に加えられたトルクを監視するための少なくとも1つのトルクセンサ121aを含むことができる。あるいは、トルクセンサ121aは駆動軸上のトルクを計算または導出することができるパラメータを監視するように構成されてよい。1つまたは複数の監視装置121は作業環境100に関連するある環境特徴を監視するように構成されてよいと考えられる。例えば、1つまたは複数の機械120a、120bは、機械が移動する表面に関連する実際勾配を測定する傾斜計を含むことができる。1つまたは複数の監視装置121を機械の場所データの収集専用にしてもよいとも考えられる。例えば、機械120a、120bはそれぞれ、機械に関連する場所データ(例えば、緯度、経度、高度等)を監視するためのGPS装置を含むことができる。
【0020】
データ収集器125は、監視装置121により収集された性能データを受信、収集、パッケージ化、および/または配信するように構成されてよい。本明細書で使用されるように用語「性能データ」は、1つまたは複数の機械120にあるいはその構成部品またはサブシステムの任意のものに関連する少なくとも1つの動作態様を示す任意のタイプのデータを指す。性能データの非限定的例としては、燃料レベル、油圧、エンジン温度、冷却材流量、冷却液温度、タイヤ空気圧等の健全性情報、あるいは機械120a、120bの1つまたは複数の部品またはサブシステムの健全性を示す他の任意のデータが挙げられる。代替案としておよび/または追加として、性能データは、エンジン出力状態(例えば、エンジンの運転、アイドル、オフ状態)、エンジン時間、回転速度、機械対地速度、機械の場所および高度、動作中の機械の現在のギア等の状態情報、あるいは機械120の状態を示す他の任意のデータを含むことができる。任意選択的に、性能データはまた、作業進捗情報、荷重対容量比、シフト期間、運搬統計値(重量、積載量等)、燃料効率等のある生産性情報、あるいは機械120の生産性を示す他の任意のデータを含んでよい。代替案としておよび/または追加として、性能データは、機械120a、120bの1つまたは複数の態様または部品を制御するための制御信号を含むことができる。データ収集器125は、機械の動作中に通信線122を介し1つまたは複数の監視装置から性能データを受信することができる。
【0021】
一実施形態によると、データ収集器125は、通信ネットワーク130を介し運搬経路管理システム135に受信データを自動的に送信することができる。代替案としてまたは追加として、データ収集器125は、運搬経路管理システム135へのその後の送信のために、所定期間の間受信データをメモリ内に格納することができる。例えば、機械と運搬経路管理システム135間の通信路が一時的に利用不可能となった場合、性能データを検索することができ、通信路が復元されるとその後送信することができる。
【0022】
通信ネットワーク130は、機械120a、120bと運搬経路管理システム135等の非搭載システムとの間の双方向通信を提供する任意のネットワークを含むことができる。例えば通信ネットワーク130は、例えば衛星通信システム等の無線ネットワーキングプラットホームにわたって機械120a、120bと運搬経路管理システム135とを通信で結合することができる。代替案としておよび/または追加として、通信ネットワーク130は、1つまたは複数の機械120a、120bと運搬経路管理システム135とを通信で結合するための適切な1つまたは複数の広帯域通信プラットホーム(例えば、セルラー、ブルートゥース、マイクロ波、ポイントツーポイント無線、ポイントツーマルチポイント無線、マルチポイントツーマルチポイント無線、または多くの部品をネットワーク化するための他の任意の適切な通信プラットホーム等)を含むことができる。衛星無線通信ネットワークとして通信ネットワーク130を例示したが、通信ネットワーク130は例えばイーサネット(登録商標)、光ファイバー、導波管等の有線ネットワーク、あるいは他の任意のタイプの有線通信ネットワークを含んでよいと考えられる。
【0023】
運搬経路管理システム135は、1つまたは複数の個々の機械の性能または動作を監視、解析、最適化、および/または制御することにより運搬経路の性能を改善するように協働する1つまたは複数のハードウェア部品および/またはソフトウェアアプリケーションを含むことができる。運搬経路管理システム135は、機械120a、120bから収集した性能データを収集、配信、解析、および/または管理するための状態監視システム140を含むことができる。運搬経路管理システム135はまた、駆動軸トルクを決定し、有効積算勾配(total effective grade)を推定し、転がり抵抗を計算し、および/または機械または機械駆動系の性能を示すことができる他の適切な特徴を決定するためのトルク推定器150を含むことができる。運搬経路管理システム135はまた、作業環境100内で動作する機械の性能ベースのモデルをシミュレートするとともに、作業環境生産性を改善するために機械120a、120bの動作パラメータおよび/または運搬経路の物理的特徴を調整する性能シミュレータ160を含むことができる。
【0024】
状態監視システム140は、機械120a、120bに関連する性能データを受信、解析、送信、および/または配信するように構成された任意のコンピュータシステムを含むことができる。状態監視システム140は、通信ネットワーク130を介し1つまたは複数の機械120に通信で結合されてよい。状態監視システム140は、機械120a、120bのそれぞれに関連する性能データを収集し広めるように構成された集中型サーバおよび/またはデータベースを具現することができる。収集されると、状態監視システム140は、データタイプ、優先度等に従って性能データを分類および/またはフィルタ処理する。重大または最優先データの場合には、状態監視システム140は、重大事象を経験した機械を特定する「緊急」または「重大」メッセージを1人または複数の作業現場要員(例えば、修理技術者、プロジェクト管理者等)に送信するように構成されてよい。例えば、機械が使えなくされるか、非認可作業領域に入るか、あるいは重大なエンジン動作条件を経験した場合、状態監視システム140は、プロジェクト管理者、現場職長、シフト管理者、機械オペレータ、および/または修理技術者に機械に関する潜在的な問題を示すメッセージ(テキストメッセージ、電子メール、ページング等)を送信することができる。
【0025】
状態監視システム140は、ある開示実施形態による処理を実行するハードウェアおよび/またはソフトウェア部品を含むことができる。例えば、図2に例示されるように、状態監視システム140は、1つまたは複数の送受信器装置126、中央処理装置(CPU)141、通信インターフェース142、記憶装置143、ランダムアクセスメモリ(RAM)モジュール144および読み取り専用メモリ(ROM)モジュール145を含む1つまたは複数のコンピュータ可読メモリ装置、表示装置147、および/または入力装置148を含むことができる。上記部品は例示的であり、限定することを意図していない。状態監視システム140は上に掲載されたものの代替および/または追加部品を含んでよいと考えられる。
【0026】
CPU141は、ある開示実施形態による1つまたは複数の処理を実行するために命令を実行しデータを処理する1つまたは複数の処理装置であってよい。例えば、CPU141は、状態監視システム140が機械120a、120bのデータ収集器125から性能データを要求および/または受信することを可能にするソフトウェアを実行することができる。CPU141はまた、収集された性能データを記憶装置143に格納するソフトウェアを実行することができる。さらに、CPU141は、状態監視システム140が1つまたは複数の機械120a、120bから収集された性能データを解析し、機械に関する潜在的問題を特定する診断および/または予後解析を行い、あらゆる潜在的問題を機械オペレータまたは加入者170に通知し、および/または機械性能を改善するための勧告を含むカスタマイズ作業分析報告を提供する、ことを可能にするソフトウェアを実行することができる。
【0027】
CPU141は、状態監視システム140に関連する1つまたは複数の部品間の通信媒体を提供するように構成することができる共通情報バス146に接続されてよい。例えば、共通情報バス146は、複数の装置との間で情報を通信するための1つまたは複数の部品を含むことができる。CPU141は、以下に説明されるように、ある開示実施形態による方法を実行するために例えば記憶装置143、RAM144、および/またはROM145等のコンピュータ可読媒体装置に格納された一連のコンピュータプログラム命令を実行することができる。
【0028】
通信インターフェース142は、送受信器装置126を介し状態監視システム140と遠隔システム(例えば、機械120a、120b)間の双方向データ通信用に構成された1つまたは複数の構成要素を含むことができる。例えば、通信インターフェース142は、1つまたは複数の変調器、復調器、マルチプレクサ、デマルチプレクサ、ネットワーク通信装置、無線装置、アンテナ、モデム、あるいは状態監視システム140と遠隔システムまたは部品間の双方向通信インターフェースを支援するように構成された他の任意の装置を含むことができる。
【0029】
1つまたは複数のコンピュータ可読媒体装置は、状態監視システム140のCPU141により使用される情報、命令、および/またはプログラムコードを格納するように構成された記憶装置143、RAM144、ROM145、および/または他の任意の磁気データ、電子データ、フラッシュデータ、または光学データコンピュータ可読媒体装置を含むことができる。記憶装置143は、磁気ハードドライブ、光ディスクドライブ、フロッピードライブ、フラッシュドライブ、あるいは他の任意のこのような情報格納装置を含むことができる。ランダムアクセスメモリ(RAM)装置144は、CPU141により情報と命令を格納する任意の動的記憶装置を含むことができる。RAM144は、CPU141により実行される命令の実行中に一時変数または他の中間情報を格納してもよい。動作中に、オペレーティングシステム(図示せず)のいくつかの部分またはすべての部分をRAM144内にロードすることができる。さらに、読み取り専用メモリ(ROM)モジュール145は、CPU141により情報と命令を格納するための任意の静的記憶装置を含むことができる。
【0030】
状態監視システム140は、機械120a、120bのそれぞれに関連する性能データを解析するように構成されてよい。一実施形態によると、状態監視システム140は、それぞれの機械に関連する閾値(これらは工場設定であってもよいし、製造者推奨であってよいし、および/またはユーザ設定であってもよい)に基づいて1つまたは複数の機械120a、120bに関連する性能データを解析するための診断ソフトウェアを含むことができる。例えば、状態監視システム140に関連する診断ソフトウェアは、特定の機械から受信されたエンジン温度測定値と所定の限界エンジン温度とを比較することができる。測定されたエンジン温度が限界温度を越えた場合、状態監視システム140は、警報を発生し、機械オペレータ、現場管理者、修理技術者、配送係、または他の任意の適任者または適正エンティティのうちの1つまたは複数に通知することができる。
【0031】
別の実施形態によると、状態監視システム140は1つまたは複数の機械120a、120bに関連する生産性を監視し解析するように構成されてよい。例えば、状態監視システム140は、それぞれの機械に関連するユーザ定義の生産性閾値に基づき1つまたは複数の機械120a、120bに関連する性能データを解析する生産性ソフトウェアを含むことができる。生産性ソフトウェアは、それぞれの機械120a、120bに関連する生産性レベルを監視するとともに、オペレータまたは機械の生産性データを定期的に受け取るプロジェクト管理者、機械オペレータ、修理技術者、または他の任意のエンティティ(例えば、人事部、オペレータ訓練・認証事業部等)のために生産性報告を生成するように構成されてよい。例示的な一実施形態によると、生産性ソフトウェアは、機械に関連する生産性レベル(例えば、特定の機械により移動された材料の量)とそれぞれの機械に対し設定された所定生産性割り当てとを比較することができる。生産性レベルが所定割り当て未満であった場合、機械の生産性不足を示す生産性通知を生成して機械オペレータおよび/またはプロジェクト管理者に提供することができる。
【0032】
状態監視システム140は、1つまたは複数の他のバックエンドシステムとデータ通信を行ってもよいし、詳細解析のためにある性能データをこれらのシステムに配信するように構成されてよい。例えば、状態監視システム140は、トルク推定器150に通信で結合されてもよいし、機械駆動軸に関連する性能データをトルク推定器150に提供するように構成されてもよい。代替案としてまたは追加として、状態監視システム140は性能シミュレータ160とデータ通信を行ってもよいし、詳細解析のために性能データを性能シミュレータ160に提供するように構成されてもよい。トルク推定器150と性能シミュレータ160は、状態監視システム140の外部のスタンドアロンシステムとして例示されたが、トルク推定器150と性能シミュレータ160の内の1つまたは両方は状態監視システム140のサブシステムとして含まれてよいと考えられる。
【0033】
トルク推定器150は、状態監視システム140からある性能データを受信/収集し、受信された性能データに基づき1つまたは複数の機械120a、120bに関連する駆動軸トルクを決定するように構成されたハードウェアまたはソフトウェアモジュールを含むことができる。トルク推定器150はトルクセンサ121aにより収集された性能データに基づき駆動軸トルクを決定するように構成されてよい。代替案としてまたは追加として、駆動軸トルクは、機械の性能データと既知の設計パラメータとに基づいて推定されてよい。例えば、エンジン動作速度と作動ギアとに基づき、トルク推定器150は電子参照テーブルにアクセスし、この参照テーブルを使用して特定の積載重量における機械の駆動軸トルクを推定することができる。
【0034】
推定機械駆動軸トルクが決定されると、トルク推定器150は1つまたは複数の機械の有効積算勾配を推定することができる。例えば、トルク推定器150は、次のような有効積算勾配(TEG:total effective grade)値を推定することができる。
【0035】
【数1】
【0036】
式中、RPは機械牽引力を指し、GMWは総機械重量を指し、MAは機械の加速を指し、AGはその機械が位置する地形の実際勾配を指す。搭載データ監視装置121を使用して総機械重量と機械加速を監視することができる。機械に関連する監視GPSデータに基づき実際勾配を推定することができる。例えば、搭載GPS装置から集められた高精度GPSデータから導出される機械の緯度、経度および高度に基づいて実際勾配を決定することができる。一実施形態によると、位置の垂直変化(GPSデータに関連する高度データに基づく)と位置の水平変化(GPSデータに関連する緯度と経度のデータに基づく)との比を計算することにより実際勾配を決定することができる。代替案としてまたは追加として、実際勾配は、例えば傾斜計等の搭載データ監視装置を使用して計算されてよい。牽引力は次のように決定することができる。
【0037】
【数2】
【0038】
式中、DATは機械駆動軸に加えられるトルクを指し、LPTRは低パワートレイン減少係数を指し、PTEはパワートレインの効率を指し、TDRRはタイヤの動的回転半径を指す。牽引力の実時間計算中にギアの変化を監視することにより低パワートレイン減少を決定することができる。機械から収集された実時間性能データに基づきパワートレイン効率を計算することができる。監視されたタイヤ空気圧、速度および総機械重量に基づきタイヤ動的回転半径を推定することができる。
【0039】
有効積算勾配が決定されると、トルク推定器150は1つまたは複数の機械120a、120bに関連する転がり抵抗を決定することができる。転がり抵抗値は次のように計算することができる。
RR=TEG−(AG+EL) (式3)
式中、ELは機械の効率損失を指す。効率損失は、入力電力効率と出力電力効率との差として推定することができ、特定のエンジン動作速度と荷重条件における経験的な試験データに基づいて推定することができる。説明したように、実際勾配は、収集されたGPSデータに関連する計算に基づき決定することができ、および/または搭載傾斜計を使用して監視することができる。
【0040】
性能シミュレータ160は、様々な動作または環境条件下の機械120a、120bの性能をシミュレートするように構成されてよい。模擬性能結果に基づいて、性能シミュレータ160は、機械120a、120bおよび/または作業環境100の所望の性能を達成するための1つまたは複数の機械動作条件(例えば、速度、ギア選択、エンジンRPM等)、および/または運搬道路パラメータ(例えば、実際勾配、転がり抵抗、表面密度、表面摩擦等)を決定することができる。
【0041】
性能シミュレータ160は、部品または機械シミュレーションソフトウェアを含む任意のタイプのコンピュータシステムであってよい。シミュレーションソフトウェアは、機械の実時間動作から収集された経験的なデータに基づいて機械またはその構成部品の任意のものに対応する解析モデルを構築するように構成されてよい。モデルが構築されると、性能シミュレータ160は、特定の動作条件(例えば、荷重条件、環境条件、地形条件、運搬経路設計条件等)下でモデルを解析し、特定条件に基づき機械の模擬性能データを生成することができる。
【0042】
一実施形態によると、性能シミュレータ160は、それぞれの機械120a、120bに関連する理想設計モデルを含むことができる。これらの理想モデルは、理想性能データ(すなわち、(理想動作条件下で)設計されるような機械の性能に基づくデータ)を生成するために電子的にシミュレートされてよい。機械が老化するにつれ機械に関連する部品が通常の摩耗、ストレス、および/または動作中の機械に対する損傷により非理想的振る舞いを呈し始め得ることを当業者は認識するであろう。これらの非理想に合致するより現実的な性能シミュレーションを提供するために、理想モデルは、機械120a、120bから収集された実際の性能データに基づいて編集されてよく、こうしてそれぞれの機械および/またはその個々の部品の実際的または経験的モデルを生成することができる。
【0043】
性能シミュレータ160はまた、機械120a、120bのそれぞれに関連する実際の性能ベースのモデルを含むことができる。上記理想設計モデルと同様に、これらの性能ベースのモデルは様々な実際の動作条件下で機械の性能と生産性を予測するために電子的にシミュレートされてよい。しかしながら、上記理想モデルとは対照的に、性能シミュレータは各機械に特有の特定の動作条件に基づき性能ベースのモデルを生成するように構成されてよい。性能シミュレータ160は、各模擬条件に関連する速度、トルク出力、エンジン状態、燃料消費速度、運搬経路完成時間等を決定するために様々な機械動作条件下で運搬車120bの実際のモデルをシミュレートすることができる。代替案としてまたは追加として、性能シミュレータ160は、所望閾値動作範囲内で1つまたは複数の機械を動作させる運搬道路パラメータを特定するために、運搬道路面に関連する様々な物理条件(例えば、勾配レベル、摩擦レベル、平滑度、密度、硬度、水分含有量等)下で運搬車120bの実際のモデルをシミュレートするように構成されてよい。それゆえ、性能シミュレータ160は、運搬道路上で操作される1つまたは複数の機械に関連する実際の性能データに基づき運搬道路設計をカスタマイズするための解決策を鉱山オペレータと運搬道路設計者に提供することができる。
【0044】
性能シミュレータ165は、予想的な運搬道路設計に関連する運搬道路パラメータ155を受信するように構成されてよい。例えば、見込みの鉱山環境のための運搬道路の設計に先立って、性能シミュレータ165は加入者170から1つまたは複数の運搬道路パラメータ155を受信することができる。運搬道路パラメータ155は、例えば、運搬道路開始点(例えば、鉱石貯蔵場における);運搬道路終点(例えば、輸送または処理施設における);初期の運搬道路勾配;予備運搬道路の経路;運搬道路予算;あるいは、運搬道路を設計する際に加入者170により定義されてよい他の任意のパラメータ等の運搬道路を設計するのに使用し得る任意のパラメータを含むことができる。
【0045】
性能シミュレータ160は、ユーザが様々な運搬道路設計条件下で1つまたは複数の機械に対応する理想および/または性能ベースのソフトウェアモデルをシミュレートできるように構成されてよい。例えば、運搬車に関連するソフトウェアモデルを使用して、性能シミュレータ160は、運搬車に提示される有効積算勾配および/または転がり抵抗を変化させることにより複数の運搬道路勾配における運搬車の動作をシミュレートすることができる。上記式を使用して、性能シミュレータは、運搬車に提示される各有効積算勾配および/または転がり抵抗値に対応する実際勾配を決定し、1つまたは複数の運搬道路設計に関連する道路勾配に基づいて機械性能の傾向を特定することができる。加入者170は、機械の模擬性能が所望性能特性を呈するところの勾配率を特定することにより運搬道路設計の実際勾配を選択することができる。例えば、燃料消費量を最小化することが優先事項である鉱山環境では、性能シミュレータ160は、機械に最小量の燃料を消費させる運搬道路勾配を特定することができる。代替案としておよび/または追加として、部品寿命を延長することにより機械維持および修繕費を制限することが重大である鉱山環境では、性能シミュレータ160は、機械の駆動系に対し最小量の応力および歪を生成する運搬道路勾配を特定することができる。
【0046】
運搬道路勾配に加えて、性能シミュレータ160はまた、他の運搬道路条件下で運搬車の動作をシミュレートするように構成されてよい。例えば、転がり抵抗は、運搬道路面密度、水分レベル、および摩擦に依存し得るタイヤおよび/または変速機スリップにより影響を受けると考えられる。したがって、性能シミュレータ160は、機械の所望性能レベルを特定するために、機械に提示された転がり抵抗レベルを変化させることにより1つまたは複数の機械の性能をシミュレートすることができる。
【0047】
所望機械性能および所望性能に関連する転がり抵抗値が特定されると、性能シミュレータ160は所望の機械性能と転がり抵抗に適合する1つまたは複数の運搬道路設計を生成することができる。例えば、性能シミュレータ160は、特定の運搬道路勾配に対して所望機械性能を機械に達成させるように、運搬道路勾配に対する特定の運搬道路面密度、摩擦、および最大許容水分レベルを規定することができる。これらのパラメータは機械の所望勾配レベルに依存して調整されてよい。したがって、勾配レベルが増加することによりタイヤおよび/または変速機スリップの可能性を増加させるので、運搬道路面密度、摩擦および最大許容水分レベルは勾配レベル増加を補うように調整されてよい。
【0048】
性能シミュレータ160は、異なる運搬道路設計間の費用対効果関係を決定するように構成されてよい。例えば、運搬道路勾配を増加させることにより、運搬道路の必要な長さを短縮させ、可能性として運搬道路建設および維持費を低減することができる。しかしながら運搬道路の勾配の増加は、機械駆動系にかかり得る応力と歪の増加により機械維持および修繕費の増加をもたらすかもしれない。さらに、タイヤおよび/変速機スリップはより険しい勾配上で頻繁に発生し得るので、運搬道路の長さの短縮の結果としての運搬道路建設費の節約は、スリップを低減することを目的とした運搬道路の調整(例えば、運搬道路面密度を増加させる、土壌中の過剰水分を制限するために運搬道路排水を増加するなど)に伴う費用の増加により相殺されるかもしれない。性能シミュレータ160は、異なる各運搬道路設計に関連する潜在的な費用対効果をコンパイルすることができる。
【0049】
性能シミュレータ160はまた、部品故障を予測しおよび/または機械の特定部品またはサブシステムの残り寿命を推定するために、実際の機械モデル(すなわち、実際の機械データから導出または生成されたモデル)をシミュレートする診断および/または予後シミュレーションツールを含むことができる。例えば、エンジンおよび/または変速機に関連する性能データに基づき、性能シミュレータ160は、エンジン、駆動系、差動ブレーキ、あるいは機械の他の部品またはサブシステムの残り寿命を予測することができる。したがって、性能シミュレータ160は、1つまたは複数の運搬道路パラメータの変化が1つまたは複数のこれらの部品の寿命にどのように影響を与え得るかを予測することができる。例えば、性能シミュレータ160は、特定の運搬道路区間の勾配が1.5%低減されることによりエンジン、変速機および/または駆動系への歪を低減した場合に駆動系の残り寿命が15%増加し得るということを推定することができる。性能シミュレータ160は、鉱山オペレータ、プロジェクト管理者、機械オペレータ、および/または作業環境100の保守部門にこのデータを定期的に報告することができる。
【0050】
例示的な一実施形態によると、状態監視システム140および/または性能シミュレータ160の1つまたは複数は、運搬経路の一部分に関連する性能データの傾向を監視するように構成されてよい。例えば、性能シミュレータ160は、運搬経路上で動作する1つまたは複数の機械に関連する実時間の有効積算勾配を監視するように構成されてよい。高精度GPSデータを使用して、性能シミュレータ160は、実時間の有効積算勾配データと有効積算勾配データが収集された時の機械の特定の位置とを関連付けることができる。性能シミュレータ160は、監視された有効積算勾配データの傾向を特定するとともに、1つまたは複数の機械の性能を不必要に制限し得る運搬経路に関る潜在的問題を特定するためにこれらの傾向と運搬経路の特定の部分とを関連付けるように構成されてよい。
【0051】
別の例によると、性能シミュレータ160は、機械120a、120bが運搬経路作業中に過剰回数のギアチェンジをいつ行うかを判断することにより運搬道路条件に起因する1つまたは複数の機械120a、120bに関連する性能不足を検知するように構成されてよい。性能シミュレータ160は、運搬経路の特定の部分に対応する1つまたは複数の機械120a、120bに関連するギアチェンジ(例えば、低速への切り替え、高速への切り替え等)の回数を監視し記録するように構成されてよい。性能シミュレータ160は1つまたは複数の運搬経路区間に関連するギアチェンジの平均回数を計算するように構成されてよい。性能シミュレータ160は、さらなる性能シミュレーションおよび/または解析のために、閾値許容レベルを越えるギアチェンジの平均回数を有する運搬経路の区間を特定することができる。
【0052】
性能シミュレータ160は性能シミュレーションの結果および/または運搬道路設計データを出力するように構成されてよい。例えば、性能シミュレータ160は、状態監視システム140に関連する表示装置147を介し性能シミュレーション結果および/または運搬道路設計データを出力することができる。代替案としておよび/または追加として、性能シミュレータ160は作業環境100に関連する運搬道路設計概要165を生成することができる。運搬道路設計概要165は、シミュレーション中に使用した、異なる有効積算勾配レベルおよび/または転がり抵抗値に対応する性能シミュレーション結果を含むことができる。運搬道路設計概要165はまた、性能シミュレータ165によりコンパイルされた各運搬道路設計に対する任意の費用対効果データも含むことができる。費用対効果データは、履歴または以前の運搬道路設計プロジェクトから集められたデータに基づいてよい。性能シミュレータ160は、1人または複数の加入者170に運搬道路設計概要165を配信するように構成されてよい。
【0053】
性能シミュレータ160は、運搬経路設計データの1人または複数の指定加入者170に運搬道路設計概要165を提供することができる。加入者170は例えば、プロジェクト管理者、鉱山所有者、あるいは運搬道路設計概要165を受信するように指定してよい他の任意の人物またはエンティティ等の運搬道路設計顧客を含むことができる。
【0054】
状態監視システム140、トルク推定器150、および/または性能シミュレータ160の1つまたは複数は、単一の統合型ソフトウェアパッケージまたはハードウェアシステムとして含まれてよいと考える。代替案としてまたは追加として、これらのシステムは、他のシステムの1つまたは複数の動作を容易にするように相互作用または協働するように構成された個別のスタンドアロンモジュールを具現することができる。例えば、トルク推定器150は性能シミュレータ160とは別のスタンドアロンシステムとして図示され説明されたが、トルク推定器150は、性能シミュレータ160と同じコンピュータシステム上で動作するように構成されたソフトウェアモジュールとして含まれてもよいと考えられる。
【0055】
本開示の実施形態による処理と方法は、ネットワーク接続された工事現場のデータ収集能力を、運搬道路上で操作される1つまたは複数の機械の性能に基づいて運搬道路を設計する機械性能シミュレーションソフトウェアで梃入れする対話型解決策を提供することができる。本開示の運搬道路設計システムは、鉱山オペレータが、運搬道路上で操作される機械の特定の動作特性だけでなくいくつかの所望の設計優先度に基づいて運搬道路設計もカスタマイズすることを可能にする解決策を提供することができる。その結果、本明細書に記載のシステムと方法を採用する鉱山オペレータは、特定の機械性能と運搬経路生産性目標をより効果的に達成するように運搬道路設計を調整することができる。図3と図4に、フローチャート300と400をそれぞれ示す。各図は、運搬道路管理システム135を使用して実施することができる運搬道路設計の例示的な方法を示す。
【0056】
図3には、機械性能に基づいて運搬道路を設計する例示的な方法を示すフローチャート300を示す。本方法は、加入者170から運搬道路パラメータ155を受信すると開始することができる(工程310)。一実施形態によると、性能シミュレータ160は、加入者170が1つまたは複数の運搬道路パラメータを入力または定義することを可能にするインターフェースを提供することができる。性能シミュレータ160は、ユーザにより選択され得る1つまたは複数のよく知られた運搬道路設計パラメータの対話型チェックリストを含むグラフィックインターフェースを提供することができる。上記のように、運搬道路パラメータは運搬道路の設計に関連する任意の所望のパラメータを含むことができる。運搬道路パラメータの非限定的な例としては、運搬道路開始点または終点に関連するGPS座標、初期の運搬道路勾配、予備運搬道路の経路および/または長さ、運搬道路予算、1つまたは複数の機械に関連する運搬道路完成時間、あるいは運搬道路を設計する際に加入者170により定義されてよい他の任意のパラメータを挙げることができる。
【0057】
性能シミュレータ160は、加入者170により提供される初期の運搬道路パラメータに基づき初期の運搬道路設計を生成するように構成されてよい。例えば、運搬道路開始点および終点に対応するGPSデータに基づき、性能シミュレータ160は初期の運搬道路設計を生成することができる。初期の運搬道路設計は、初期の運搬道路勾配、経路、長さ、表面密度、土壌水分レベル、平均動作速度等を含むことができる。この初期の運搬道路設計は運搬道路設計シミュレーションの出発点となる。
【0058】
1つまたは複数の所望の運搬道路パラメータが定義されると、運搬道路上で操作される少なくとも1種類の機械を特定することができる(工程320)。例えば、性能シミュレータ160は、ユーザに、鉱山環境において一般に操作される機械のリストから運搬道路上で操作される機械の種類と数量を選択するように指示することができる。あるいは、性能シミュレータ160は、運搬道路上で操作される1つまたは複数の実際の機械に関連する性能データをアップロードすることにより、加入者170が1つまたは複数の機械を特定できるようにする。
【0059】
性能シミュレータ160は、ユーザに、運搬道路上で操作される少なくとも1つの機械それぞれについて、少なくとも1つの目標動作パラメータを選択するように指示することができる(工程330)。本明細書で使用される用語「目標動作パラメータ」は、その値が性能シミュレーション結果を解析するためのベンチマークとして設定されてよい任意の機械パラメータまたは運搬道路パラメータを指す。例えば、目標動作パラメータは、燃料消費量レベル、温室効果ガス排出レベル、経路完成時間、部品寿命、転がり抵抗、有効積算勾配、回転速度、または機械対地速度のうちの1つまたは複数を含む。一実施形態によると、性能シミュレータ160は各機械に関連する性能パラメータのリストを加入者170に提供することができる。加入者170は機械の1つまたは複数の性能パラメータを選択することができ、これにより選択したパラメータを性能シミュレータ160内の目標パラメータとして指定できる。加入者170は指定の各目標パラメータの閾値許容範囲を設定することができる。これらの目標パラメータおよび関連する閾値範囲は、所望の機械または運搬道路の性能条件が満たされたということ示すための機械性能シミュレーション中、指定の収束点として性能シミュレータ160により使用される。例えば、ユーザは目標動作パラメータとして燃料消費量を指定し、運搬道路上で動作中の機械の燃料消費量の閾値許容範囲を規定することができる。したがって、性能シミュレータ160は機械性能を繰り返しシミュレートし、予測燃料消費速度が閾値許容範囲内に入るようにする運搬道路パラメータが選択されるまで運搬道路設計パラメータを調整することができる。
【0060】
目標パラメータおよび目標パラメータに関連する閾値範囲が設定されると、性能シミュレータ160は、運搬道路上で操作されるように選択された機械の性能をシミュレートし、各目標動作パラメータに対応する動作値を予測することができる(工程340)。上記例に従って、性能シミュレータ160は、初期の運搬道路設計パラメータ下で1つまたは複数の機械の性能をシミュレートし、運搬道路上で操作される機械のそれぞれに関連する燃料消費速度を予測することができる。
【0061】
性能シミュレータは、運搬道路設計パラメータが機械および/または運搬経路の所望の性能の達成につながるかどうかを判断するために予測動作値と目標動作パラメータとを比較することができる(工程350)。特に、目標動作パラメータのそれぞれに対応する予測動作値が加入者170により定義された閾値範囲内にある(選択された運搬道路パラメータがユーザ定義の性能パラメータに一致することを示す)場合、性能シミュレータ160は模擬性能結果および/または運搬道路パラメータを加入者170に提供することができる(工程355)。
【0062】
一方、目標動作パラメータに対応する予測動作値が指定の閾値範囲に入らない(運搬道路設計パラメータがユーザ定義の性能指針を満足しないかもしれないことを示す)場合、性能シミュレータ160は運搬道路設計パラメータの1つまたは複数を調整することができる(工程360)。例示的な一実施形態によると、性能シミュレータ160は、過去のシミュレーションから傾向を認識し、どの運搬道路パラメータが所望の性能ベンチマークを満足することに最大の影響を及ぼし得るかを自動的に決定する適応収束ソフトウェアを含むことができる。運搬道路パラメータが調整されると、処理は、調整された運搬道路設計パラメータ下で機械の動作を再シミュレートする工程340に進むことができる。ユーザ定義の目標パラメータに関連する性能要件を満たすまで工程340〜360を繰り返してよいと考えられる。
【0063】
図4には、運搬道路上で操作される1つまたは複数の機械に関連する実際の性能データに基づき運搬道路に関連する実際勾配を決定するための例示的な方法を示すフローチャート400を示す。本方法は少なくとも1つの機械の目標動作パラメータを定義する工程(工程410)を含むことができる。上記のように、性能シミュレータ160は特定の機械に関連する動作パラメータのリストを加入者170に提供することができる。性能シミュレータ160は、加入者170によって選択された1つまたは複数の動作パラメータを検知し、これらのパラメータを目標動作パラメータとして指定することができる。性能シミュレータ160はまた、加入者170に、各目標動作パラメータに対応する閾値範囲を定義するように指示することができる。
【0064】
目標動作パラメータおよび対応する閾値範囲が定義されると、少なくとも1つの機械の性能をシミュレートすることができる(工程420)。例示的な一実施形態によると、性能シミュレータ160は、少なくとも1つの機械に対し提示された有効積算勾配値を変化させることにより少なくとも1つの機械の性能をシミュレートし、各模擬有効積算勾配値における機械の性能を監視することができる。
【0065】
性能シミュレータ160はシミュレーションに基づき目標動作パラメータの予測動作値を生成することができる(工程430)。例えば、加入者170が目標動作パラメータとして運搬道路駆動系寿命を指定した場合、性能シミュレータ160はそれぞれの機械の模擬性能に基づき少なくとも1つの機械のそれぞれの駆動系寿命を予測することができる。
【0066】
性能シミュレータ160は、目標動作パラメータの閾値範囲内に予測動作値が入るようにする有効積算勾配値を特定することができる(工程440)。上記例に従って、性能シミュレータ160は、加入者170によって設定された閾値寿命範囲内に駆動系寿命が入るようにする有効積算勾配を特定することができる。
【0067】
許容可能な有効積算勾配値が特定されると、性能シミュレータ160は有効積算勾配値に対応する実際勾配値を決定/計算することができる(工程450)。例えば、式(1)を使用して、所与の有効積算勾配、機械重量、機械加速、および牽引力に対する実際勾配を決定/計算することができる。性能シミュレータ160は続いて運搬道路設計概要165を生成し、1人または複数の加入者170に設計概要を提供することができる(工程460)。説明したように、運搬道路設計概要165は、複数の有効積算勾配値の条件下の模擬機械性能と、有効積算勾配値のそれぞれに関連する実際勾配データとを含むことができる。
【産業上の利用可能性】
【0068】
開示された実施形態に関連する方法とシステムは、特定のユーザ定義の運搬道路パラメータおよび性能目標に基づいて運搬道路を設計するための解決策を提供する。本明細書に記載のシステムと方法はまた、機械の性能への運搬道路設計の影響を判断するために、ユーザが性能ベースの機械モデルをシミュレートすることにより運搬道路改修提案を試験することを可能にする。本明細書に記載の処理と特徴を採用する作業環境は、加入者が運搬道路パラメータを定義し、運搬道路パラメータと実際の機械性能データに基づいて運搬道路設計を効率的に作成することを可能にするシステムを提供する。その結果、各運搬道路設計を、運搬道路上で操作される特定の機械の性能に基づいて加入者の特定の機械性能目標に合わせることができる。
【0069】
開示された実施形態は鉱山環境における運搬道路条件を改善することに関連して説明されたが、これらの実施形態は、道路上で操作される機械の性能に基づいて道路を設計することが有利と考えられる任意の環境に適用可能である。一実施形態によると、運搬道路条件を改善するための本開示のシステムと方法は、一団の機械に関連する性能データを監視しこれら一団の機械に関する潜在的問題を診断するネットワーク接続された工事現場環境の一部として実施されてよい。その結果、本明細書に記載のシステムと方法は、1つまたは複数の機械の性能を監視し運搬道路上で操作される特定の機械の性能に基づいて運搬道路を設計するための統合システムを提供することができる。
【0070】
運搬道路を設計するための本開示のシステムと方法はいくつかの利点を有すると考えられる。例えば、本明細書に記載のシステムと方法は、運搬道路上で操作される1つまたは複数の特定の機械に関連する性能データに基づいて運搬道路設計を自動的に生成し試験するための解決策を提供する。その結果、本運搬道路設計は、運搬道路上で操作される1つまたは複数の機械の効率的な性能を達成するように特に調整されてよい。
【0071】
さらに、本開示の運搬道路設計システムは著しい費用優位性を有すると考えられる。例えば、設計される運搬道路のパラメータに基づいて1つまたは複数の機械の性能をシミュレートすることにより、本開示のシステムは、設計の変更が建設費と建設遅れを著しく増やし得る場合、運搬道路の建設を始める前に設計提案が目標性能要件を満たすことをユーザが確実にできるようにする。
【0072】
本開示の範囲から逸脱することなく、運搬道路を設計する本開示のシステムと方法に対し様々な変形と修正をなし得ることは当業者に自明である。本開示の他の実施形態は本明細書の考察と本開示の実行から当業者に自明である。本明細書と例はあくまで例示的であると考えられ、本開示の真の範囲は以下の特許請求の範囲およびそれらの均等物により示されることを意図している。
【特許請求の範囲】
【請求項1】
機械性能に基づき運搬道路を設計する方法であって、
1つまたは複数の運搬道路パラメータを受信する工程(310)と、
運搬道路上で操作される少なくとも1種類の機械を特定する工程(320)と、
少なくとも1種類の機械に関連する少なくとも1つの目標動作パラメータを選択する工程(330)と、
少なくとも1つの目標動作パラメータに対応する動作値を予測するために少なくとも1種類の機械の性能をシミュレートする工程(340)と、
対応する目標動作パラメータの閾値範囲内に予測動作値がない場合、1つまたは複数の運搬道路パラメータを調整する工程(360)と、を含む方法。
【請求項2】
模擬性能データを出力する工程をさらに含む、請求項1に記載の方法。
【請求項3】
1つまたは複数の運搬道路パラメータは、運搬道路開始点の場所、運搬道路終点の場所、運搬道路勾配、および運搬道路転がり抵抗のうちの1つまたは複数を含む、請求項1に記載の方法。
【請求項4】
少なくとも1つの目標動作パラメータは、燃料消費量レベル、経路完成時間、部品寿命、転がり抵抗、有効積算勾配、回転速度、または機械対地速度のうちの1つまたは複数を含む、請求項1に記載の方法。
【請求項5】
少なくとも1種類の機械の性能をシミュレートする工程は、
1つまたは複数の初期の運搬道路パラメータと少なくとも1つの目標動作パラメータとに基づき初期の運搬道路設計を生成することと、
少なくとも1つの目標動作パラメータに対応する動作値を予測するために初期の運搬道路設計に基づき少なくとも1種類の機械の性能をシミュレートすることと、
対応する目標動作パラメータの閾値範囲内に予測動作値がない場合に、第2の運搬道路設計を生成することと、を含む、請求項1に記載の方法。
【請求項6】
少なくとも1種類の機械の性能をシミュレートする工程は、少なくとも1種類の機械に関連する実際の性能データに基づき少なくとも1種類の機械の性能をシミュレートすることを含む、請求項1に記載の方法。
【請求項7】
加入者から1つまたは複数の運搬道路パラメータを受信し(170)、
運搬道路上で操作される少なくとも1種類の機械(120a、120b)に関連する性能データを受信するように構成された入力装置(148)と、
入力装置に通信で結合された性能シミュレータ(160)であって、
少なくとも1種類の機械の少なくとも1つの目標動作パラメータに対応する閾値範囲を設定し、
運搬道路パラメータの1つまたは複数と少なくとも1つの目標動作パラメータに基づき初期の運搬道路設計を生成し、
少なくとも1つの目標動作パラメータのうちのそれぞれに対応する動作値を予測するために運搬道路設計を使用して少なくとも1種類の機械の性能をシミュレートし、
対応する目標動作パラメータの閾値範囲内に予測動作値がない場合に、第2の運搬道路設計を生成するために1つまたは複数の運搬道路パラメータを調整する、ように構成された性能シミュレータと、を含む運搬経路管理システム(135)。
【請求項8】
性能シミュレータはさらに、加入者に1つまたは複数の模擬性能結果と調整された運搬道路パラメータとを提供するように構成される、請求項7に記載のシステム。
【請求項9】
1つまたは複数の運搬道路パラメータは、運搬道路開始点の場所、運搬道路終点の場所、運搬道路勾配、および運搬道路転がり抵抗のうちの1つまたは複数を含む、請求項7に記載のシステム。
【請求項10】
少なくとも1つの目標動作パラメータは、燃料消費量レベル、経路完成時間、部品寿命、転がり抵抗、有効積算勾配、回転速度、または機械対地速度のうちの1つまたは複数を含む、請求項7に記載のシステム。
【請求項1】
機械性能に基づき運搬道路を設計する方法であって、
1つまたは複数の運搬道路パラメータを受信する工程(310)と、
運搬道路上で操作される少なくとも1種類の機械を特定する工程(320)と、
少なくとも1種類の機械に関連する少なくとも1つの目標動作パラメータを選択する工程(330)と、
少なくとも1つの目標動作パラメータに対応する動作値を予測するために少なくとも1種類の機械の性能をシミュレートする工程(340)と、
対応する目標動作パラメータの閾値範囲内に予測動作値がない場合、1つまたは複数の運搬道路パラメータを調整する工程(360)と、を含む方法。
【請求項2】
模擬性能データを出力する工程をさらに含む、請求項1に記載の方法。
【請求項3】
1つまたは複数の運搬道路パラメータは、運搬道路開始点の場所、運搬道路終点の場所、運搬道路勾配、および運搬道路転がり抵抗のうちの1つまたは複数を含む、請求項1に記載の方法。
【請求項4】
少なくとも1つの目標動作パラメータは、燃料消費量レベル、経路完成時間、部品寿命、転がり抵抗、有効積算勾配、回転速度、または機械対地速度のうちの1つまたは複数を含む、請求項1に記載の方法。
【請求項5】
少なくとも1種類の機械の性能をシミュレートする工程は、
1つまたは複数の初期の運搬道路パラメータと少なくとも1つの目標動作パラメータとに基づき初期の運搬道路設計を生成することと、
少なくとも1つの目標動作パラメータに対応する動作値を予測するために初期の運搬道路設計に基づき少なくとも1種類の機械の性能をシミュレートすることと、
対応する目標動作パラメータの閾値範囲内に予測動作値がない場合に、第2の運搬道路設計を生成することと、を含む、請求項1に記載の方法。
【請求項6】
少なくとも1種類の機械の性能をシミュレートする工程は、少なくとも1種類の機械に関連する実際の性能データに基づき少なくとも1種類の機械の性能をシミュレートすることを含む、請求項1に記載の方法。
【請求項7】
加入者から1つまたは複数の運搬道路パラメータを受信し(170)、
運搬道路上で操作される少なくとも1種類の機械(120a、120b)に関連する性能データを受信するように構成された入力装置(148)と、
入力装置に通信で結合された性能シミュレータ(160)であって、
少なくとも1種類の機械の少なくとも1つの目標動作パラメータに対応する閾値範囲を設定し、
運搬道路パラメータの1つまたは複数と少なくとも1つの目標動作パラメータに基づき初期の運搬道路設計を生成し、
少なくとも1つの目標動作パラメータのうちのそれぞれに対応する動作値を予測するために運搬道路設計を使用して少なくとも1種類の機械の性能をシミュレートし、
対応する目標動作パラメータの閾値範囲内に予測動作値がない場合に、第2の運搬道路設計を生成するために1つまたは複数の運搬道路パラメータを調整する、ように構成された性能シミュレータと、を含む運搬経路管理システム(135)。
【請求項8】
性能シミュレータはさらに、加入者に1つまたは複数の模擬性能結果と調整された運搬道路パラメータとを提供するように構成される、請求項7に記載のシステム。
【請求項9】
1つまたは複数の運搬道路パラメータは、運搬道路開始点の場所、運搬道路終点の場所、運搬道路勾配、および運搬道路転がり抵抗のうちの1つまたは複数を含む、請求項7に記載のシステム。
【請求項10】
少なくとも1つの目標動作パラメータは、燃料消費量レベル、経路完成時間、部品寿命、転がり抵抗、有効積算勾配、回転速度、または機械対地速度のうちの1つまたは複数を含む、請求項7に記載のシステム。
【図1】

【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公表番号】特表2011−500992(P2011−500992A)
【公表日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2010−528902(P2010−528902)
【出願日】平成20年10月10日(2008.10.10)
【国際出願番号】PCT/US2008/011686
【国際公開番号】WO2009/051678
【国際公開日】平成21年4月23日(2009.4.23)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【Fターム(参考)】
【公表日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成20年10月10日(2008.10.10)
【国際出願番号】PCT/US2008/011686
【国際公開番号】WO2009/051678
【国際公開日】平成21年4月23日(2009.4.23)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【Fターム(参考)】
[ Back to top ]