
運航支援装置及び運航支援システム
【課題】船舶等の安全性を含めた最適な航路を効率よく探索する運航支援装置等を得る。
【解決手段】出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段21と、海気象データと個船データとに基づいて、ノード間における船舶安全に関するパラメータについて、算出した予測値又は海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段22と、避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、出発地点から目的地点において、閾値データが示す範囲を満たすエッジを抽出し、コスト予測データに基づいて、エッジから目的地までの最適航路を探索する航路探索手段23とを備えるものである。
【解決手段】出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段21と、海気象データと個船データとに基づいて、ノード間における船舶安全に関するパラメータについて、算出した予測値又は海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段22と、避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、出発地点から目的地点において、閾値データが示す範囲を満たすエッジを抽出し、コスト予測データに基づいて、エッジから目的地までの最適航路を探索する航路探索手段23とを備えるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の航路を探索するシステムに関するものである。特に荒天避航を重視した上で、最適な航路を短時間で効率よく探索するための装置及びシステムに関するものである。
【背景技術】
【0002】
船舶が航行を行う際には、現在、航海中に遭遇が予測される様々な海気象に関するデータ(以下、海気象データという)に基づいて、事前に航路等の航海計画を立案しておくことが一般的に行われている。そして、航海計画の立案を支援し、航路設定等を行うシステムが提案されている(例えば特許文献1参照)。そして、航路設定においては、航行時間、燃料消費量等のコストが少なくなるように設定するのが一般的である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−162117号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、本来、航行を行う際にはコストよりも航行の安全をさらに重視すべきことが課題である。上述の特許文献においても座礁等の事故を起こし易い海域を危険海域とし、危険海域を航路として選択することを避けるようにしている。ただ、危険海域を航路から外すことは、航路計画の立案を行う上では一般的に行われていることであるし、危険海域でなければ航行が安全であるというわけではない。
【0005】
例えば荒天の場合には、波、風等により、船体が揺れ動き、傾いたり、海水等が船体とぶつかって衝撃が加わったり、プロペラが海上に露出したりする。これにより船体、主機等の損傷、亀裂等の原因となる。また、船員が危険に晒されたり、船酔い、甲板上の艤装品への浸水、損傷等が生じることがある。そして、貨物船等であれば荷崩れや、海水打ち込み等による荷物への浸水等が生じる可能性もある。このような船舶の安全性を脅かす現象を回避し、航行の安全性を確保するような判断は、基本的に船長等のような運航者が航行前又は航行中に行うことが多かった。また、(例えば特許文献1の方法による)計画航路の結果を見ながら、船舶の安全性に問題があると判断される場合には、安全性の問題が解決されるまで、航路変更の検討を繰り返し行うことになる。
【0006】
そこで、本発明は上記のような問題点を解決し、船舶(船体、乗務員、荷物等を含む)の安全性を含めた最適な航路を効率よく探索する運航支援システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る運航支援装置は、出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段と、海気象データと個船データとに基づいて、ノード間における船舶安全に関する1又は複数のパラメータについて、算出した予測値又は海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段と、コスト予測データ及び避航予測データを少なくとも記憶する記憶装置と、記憶装置に記憶された避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、出発地点から目的地点において、閾値データが示す範囲を満たすノード間の航路を抽出し、コスト予測データに基づいて、抽出したノード間の航路の中から目的地までの最適航路を探索する航路探索手段とを備えるものである。
【発明の効果】
【0008】
本発明によれば、航路探索手段が、避航支援パラメータ生成手段が生成した避航予測データと閾値データとに基づいて、抽出したノード間の航路の中から、出発地点から目的地点までの最適な航路を探索するようにしたので、安全性に係る要件を満たす航路を探索した上で運航者等に提示することができる。そのため、基本的には、運航者は探索された航路を確認するだけでよくなる。また、避航等を行うために最適航路の探索処理を複数回やり直す等、時間、労力等の無駄を防ぐことができる。さらに、閾値データを定めておくことで、安全性に係る判断が運航者等により左右されることなく、一律に行うことができる。また、人が判断することにより生じ得る見落とし等の人為的なミスを防ぐことができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態1に係る運航支援装置の構成を表す図である。
【図2】実施の形態1に係る最適航路演算装置20の処理の流れを表す図である。
【図3】実施の形態2に係る最適航路演算装置20の処理の流れを表す図である。
【図4】本発明の実施の形態5に係る運航支援システムの構成例を表す図である。
【発明を実施するための形態】
【0010】
実施の形態1.
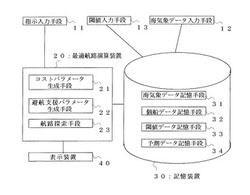
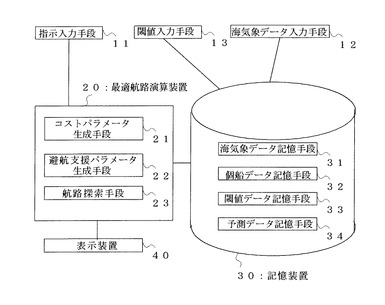
図1は本発明の実施の形態1に係る運航支援装置の構成を表す図である。図1の運航支援装置は、特に入力される各種データに基づいて演算等を行い、航路を探索するための処理を行うものである。
【0011】
ここで、本実施の形態における運航支援装置の航路探索処理においては、海域等の航行域について、例えば緯度、経度方向を所定の間隔(例えば2.5度間隔)で格子(メッシュ)状に区切った各交点をノードとして設定するようにしておく。この間隔の数値は、緯度、経度それぞれに任意に定めることができる。そして、船舶は航行する際、ノード間(エッジ)を移動していくものとする。そのため、例えばあるノードとその周囲のノード間が運航支援装置が探索する航路の最小単位となる。そして、航路探索処理においては、あるノードから次のノードへのエッジのうち、安全性、コスト(経済性等)の面から最良と判断したエッジをつなげていくことで、例えば出発地点(航行中における現在地点を含む)から目的地点まで、最適な航路を探索することとなる。
【0012】
図1において、指示入力手段11は、例えば運航者等が、出発地点、目的地点等、また、航路探索に参照すべきコスト(例えば燃料消費量等)に関する指示に係るデータを入力するための手段である。ここでは、特に示していないが、例えば現在地点のデータ等は、GPS(Global Positioning System :全地球測位システム)によって測位したデータを自動的に入力する等、指示に係るデータの入力は必ずしも運航者等によらなくてもよい。
【0013】
海気象データ入力手段12は、例えば外部の装置(システム)から、各ノードにおける例えば現在〜1週間先の海気象に関するデータ(例えば波高、風速等。以下、海気象データという)を入力するための手段である。ここで、海気象データ入力手段12は、さらに記憶装置30に記憶するための処理を行うものとする。本実施の形態では、コストパラメータ生成手段21及び避航支援パラメータ生成手段22は、ともに海気象データを演算のために用いる。
【0014】
閾値入力手段13は、最適航路演算装置20の航路探索手段23が後述する避航予測データに基づいて航路を探索処理する際、危険からの回避をはかり、安全性に係り、許容できる限界等を判断するための基準(条件)となる閾値を閾値データとして入力するための手段である。ここで、閾値入力手段13は、さらに記憶装置30に記憶するための処理を行うものとする。閾値に関しては、例えば絶対値を閾値として、探索処理の際に、±閾値によって範囲に基づく判断を行うものもある(正の値しかない場合には、0〜閾値、閾値以上等の範囲を扱う場合もある)。閾値入力手段13により閾値を入力できるようにすることで、閾値を変更した場合の航路確認等を行うことができる。また、起こりうる事象の発生確率を閾値としてもよい。なお、ここでは別の手段で構成しているが、例えば指示入力手段11と同じ手段で構成してもよい。
【0015】
記憶装置30は、本実施の形態においては、海気象データ記憶手段31、個船データ記憶手段32、閾値データ記憶手段33及び予測データ記憶手段34で構成するものとする。海気象データ記憶手段31は、海気象データ入力手段12を介して入力された海気象データを記憶する。また、個船データ記憶手段32には個船データを記憶する。記憶される個船データは、各船舶が個別に有する船体及び主機(ディーゼルエンジン等)の基本性能に関するデータである。ここでは、船舶固有の性能のデータを処理するために個船データを記憶するが、例えば船舶の種類毎に基づく概略の性能を表すデータを記憶して処理を行うようにしてもよい。また、ここでは個船データを固定したデータと扱うようにするが、荷物の種類、積載重量等により性能が変化することがあるため、場合によっては、個船データの一部又は全部を航行毎に変更等できるようにしてもよい。
【0016】
さらに閾値データ記憶手段33には、閾値入力手段13を介して入力された閾値データを記憶する。そして、予測データ記憶手段34には、後述するように、コストパラメータ生成手段21、避航支援パラメータ生成手段22が生成したコスト予測データ及び避航予測データ(これらをまとめた場合には予測データという)を記憶する。
【0017】
最適航路演算装置20は、本実施の形態においては、コストパラメータ生成手段21、避航支援パラメータ生成手段22、航路探索手段23で構成する。ここで、最適航路演算装置20の各手段について、それぞれ異なる専用機器(ハードウェア)で構成することもできる。また、例えば、CPU(Central Processing Unit )を中心とする演算制御手段(コンピュータ)で1又は複数のハードウェアを構成し、各手段が行う処理手順をあらかじめプログラム化し、ソフトウェア、ファームウェア等で構成しておくこともできる。このとき、最適航路演算装置20がそのプログラムを実行して、プログラムに基づく処理を行うことにより、上記の各手段が行う処理を実現するようにする。これらのプログラムに係るデータは例えば記憶装置30等に記憶しておくようにする。
【0018】
コストパラメータ生成手段21は、エッジのコストに関するパラメータの予測値を算出してデータ(コスト予測データ)を生成する。算出するコストの種類としては、例えば燃料消費量、船速(航行時間)等がある。コストパラメータ生成手段21は、個船データ記憶手段32が記憶する個船データ及び海気象データ記憶手段31が記憶する海気象データに基づいて、1又は複数のコストに係るコスト予測データを生成し、予測データ記憶手段34に記憶させる。ここで、本実施の形態においては、航路として通過し得るすべてのエッジ(ノード間)について、コスト予測データを生成するものとする。
【0019】
また、避航支援パラメータ生成手段22も、例えば個船データ及び海気象データに基づいて、設定されたエッジの船舶安全に関するパラメータの予測値を算出等したデータ(避航予測データ)を生成する。ここで、避航予測データについて、例えば、海水打ち込みの発生確率、波浪衝撃力等については算出を行って生成する。また、例えば波高、波周期、波向き、風速、風向き等の、船舶の安全性と密接に関連する海気象については、例えば海気象データをそのまま避航予測データとして用いるようにしてもよい。
【0020】
ここで、本実施の形態では、コストパラメータ生成手段21、避航支援パラメータ生成手段22では、海気象データが変更される度に、それぞれ演算等を行い、コスト予測データ、避航予測データを生成し、更新を行うものとする。そのため、最新の海気象データに基づく予測データを得ることができる。
【0021】
航路探索手段23は、予測データ記憶手段34に記憶されているコスト予測データ及び避航予測データに基づいて、指示入力手段11から入力された出発地点から目的地点までの航路を探索処理して最適航路データを生成する。探索処理については、例えば、避航支援パラメータ生成手段22が生成した避航予測データと閾値データ記憶手段33に記憶された閾値データに基づいて、安全性に係る要件(例えば風速30m/s以下等)を満たす範囲(域)内にある避航予測データを有するエッジを抽出する。そして、さらに抽出したエッジから、コスト予測データに基づいて、例えば、燃料消費量、航行時間等、コスト的に最適と判断したエッジ(航路)を探索していって最適航路データを生成する。
【0022】
ここで、航路探索手段23の最適航路データの生成に関し、抽出したエッジからの最適経路探索アルゴリズムとしてダイクストラ(Dijkstra)法を用いて行うものとする。ダイクストラ法とは、ノード間を結ぶエッジに対して重みをつけ、その重みに基づく演算により、最小となる経路を探索する手法である。本実施の形態では、例えば燃料消費量、航行時間等のコストに対してコストパラメータ生成手段21が演算して算出した予測値を重みとし、航路探索手段23はコスト予測データに基づいて経路探索を行う。
【0023】
表示装置40は、航路探索手段23の探索処理により生成した最適航路データに基づいて、例えば地図(海図)に航路を重畳させ、運航者等に示すための航路図の表示を行う。また、特に限定するものではないが、コストパラメータ生成手段21、避航支援パラメータ生成手段22が生成した予測データ、海気象データ、閾値データ等の各種データを数値、グラフ等により表示することもできる。また、地図上に表示することもできる。また、航路比較のため、大圏航路(外乱等を考慮しない場合の最短航路)等を表示するようにしてもよい。運航者は、表示装置40に示される、安全性に係る要件を満たした航路の演算結果を参考に、その他の要件(運航者自身の経験、顧客の要請、等)を勘案しながら最終的な最適航路を決定することができる。ここで表示装置40による表示とは、画面上への表示およびプリンターへの出力等を含む。
【0024】
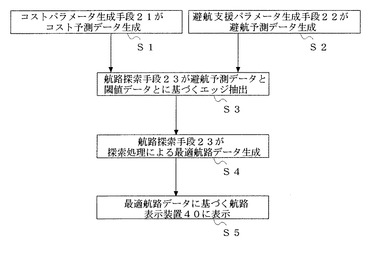
図2は実施の形態1に係る最適航路演算装置20における処理の流れの一例を表す図である。例えば、海気象データが海気象データ入力手段12から入力され、海気象データ記憶手段31に記憶されると、コストパラメータ生成手段21は、所定の種類のコストについて、予測値を算出してコスト予測データを生成し、予測データ記憶手段34に記憶させる(S1)。例えばコストの予測値については、燃料消費量等を算出する場合の所定の数式等に基づく算出を行う。
【0025】
また、避航支援パラメータ生成手段22はノード間の船舶安全に関するパラメータの予測値の算出等を行い、避航予測データを生成し、予測データ記憶手段34に記憶させる(S2)。ここで、避航支援パラメータ生成手段22がハードウェアとしてコストパラメータ生成手段21と別構成の場合は、コストパラメータ生成手段21の処理と並列して避航予測データの生成処理を行うことができる。
【0026】
そのため、船舶安全に関するパラメータの一例としては次のようなものがある。これらのパラメータのうち、例えば(1)、(2)については、海気象データを用いて避航予測データを生成することができる。
(1)波浪の大きさ(波高、波周期、波向き等)。
(2)風の強さ(風速、風向き等)。
(3)船首甲板上への海水打ち込みに係るパラメータ(発生荷重の大きさ、海水打ち込みが発生する頻度(発生確率(例えば10回に1回))等)。
(4)波浪衝撃力に係るパラメータ(衝撃力の大きさ、波浪衝撃が発生する頻度(発生確率(例えば100回に1回))等)。
(5)プロペラ(スクリュー)露出の発生確率等。
(6)船体のある位置における加速度に係るパラメータ(加速度の大きさ、限界値を超える確率等)。
(7)船体運動に係るパラメータ(各種運動量の大きさ、限界値を超える確率等)。
【0027】
避航支援パラメータ生成手段22は、1又は複数のパラメータに基づく避航予測データを生成する。ここで、船舶の種類、形状、大きさ等によって、優先すべきパラメータは基本的に異なる。また、船舶だけでなく、荷物の積載量、価値等によっても異なることがある。さらに、航行する海域等によっても異なる。このため、避航予測データを生成するパラメータの種類等については、船舶毎、航行毎に異なってもよく、特に限定するものではない。また、演算量を低減するという観点からはパラメータをあらかじめ定めておく方がよいが、例えば、避航支援パラメータ生成手段22において、算出等可能なパラメータに基づく避航予測データをすべて生成し、航路探索手段23において、閾値データにより規定することもできる。また、例えば上述のパラメータに限らず、安全性の確保に関して定量化が可能な別のパラメータ(現象)に基づく避航予測データを生成するようにしてもよい。
【0028】
航路探索手段23は、避航支援パラメータ生成手段22が生成した避航予測データと閾値データ記憶手段33に記憶された閾値データに基づいて、安全性に係る要件を満たす避航予測データを有するエッジを抽出する(S3)。ここで、閾値については、船舶の種類、形状、大きさ等によって許容できる閾値が異なる。荷物が海水に浸される損害は、浸された荷物の量と価値で大きく変化するため、閾値も変化する。また、航海計画時におけるリスクのとり方によっても異なる。例えば、閾値を設定しなかった(閾値データがない)場合には、どのような予測値を有する避航予測データ(エッジ)でも抽出対象とすることが可能になる。
【0029】
航路探索手段23は、さらに抽出したエッジに係るコスト予測データに基づいて、ダイクストラ法を用いて、指示入力手段11から入力された出発地点から目的地点までのエッジを探索処理して最適航路データを生成する(S4)。そして、最適航路データに基づく航路を表示装置40に表示させる(S5)。ここで、航路探索手段23におけるS3以降の探索処理については、コストパラメータ生成手段21及び避航支援パラメータ生成手段22が予測データの生成後、すぐに行う必要はなく、例えば、指示入力手段11から出発地点等の入力等の指示があった後等であってもよい。
【0030】
以上のように、実施の形態1の運航支援装置によれば、航路探索手段23が、避航支援パラメータ生成手段22が生成した避航予測データと閾値入力手段13の入力に係る閾値データとに基づいて、安全性の要件を満たすエッジを抽出し、抽出したエッジの中から、出発地点から目的地点までの最適な航路を探索するようにしたので、安全性に係る要件を満たす航路を探索した上で運航者等に提示することができる。そのため、基本的には、運航者は表示装置40に表示された最適航路を確認するだけでよくなる。また、航路の再検討を行う場合でも、閾値入力手段13に入力する閾値データを変更するだけでよくなる。そして、避航等を行うために、演算結果を見ながら、最適航路の探索処理を複数回やり直す等、時間、労力等の無駄を防ぐことができる。また、閾値データを数値として定量的に定めておくことで、安全性に係る判断が運航者等により左右されることなく、一律に行われるようになる。また、人が判断することにより生じ得る見落とし等の人為的なミスを防ぐことができる。
【0031】
実施の形態2.
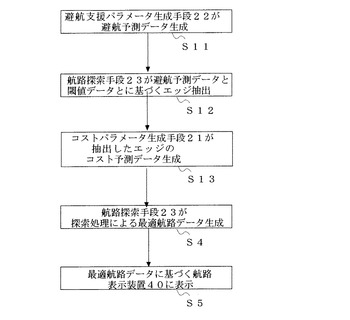
図3は本発明の実施の形態2に係る最適航路演算装置20における処理の流れについて、別の例を表す図である。上述の実施の形態では、コストパラメータ生成手段21及び避航支援パラメータ生成手段22が予測データを生成した後に、航路探索手段23が処理を行い、最適な航路を探索した。本実施の形態では、装置全体としての演算量を低減させるために、避航予測データと閾値データとに基づいて安全性に係る要件を満たす避航予測データを有するエッジを抽出した後、コストパラメータ生成手段21は、抽出したエッジにおけるコスト予測データを生成するようにしたものである。
【0032】
図3において、避航支援パラメータ生成手段22はノード間の船舶安全に関するパラメータの予測値の算出等を行い、避航予測データを生成する(S11)。生成する避航予測データについては、実施の形態1の説明と同様である。そして、航路探索手段23は、避航支援パラメータ生成手段22が生成した避航予測データと閾値データ記憶手段33に記憶された閾値データに基づいて、安全性に係る要件を満たす避航予測データを有するエッジを抽出する(S12)。
【0033】
次に、コストパラメータ生成手段21は、航路探索手段23が抽出したエッジについて、コスト予測データを生成し、予測データ記憶手段34に記憶させる(S13)。そして、抽出したエッジに係るコスト予測データに基づいて、ダイクストラ法を用いて、指示入力手段11から入力された出発地点から目的地点までのエッジを探索処理して最適航路データを生成し(S14)、最適航路データに基づく航路を表示装置40に表示させる(S15)。
【0034】
以上のように、実施の形態2の運航支援装置によれば、避航支援パラメータ生成手段22が生成した避航予測データと閾値データとに基づいて航路探索手段23が抽出したエッジについて、コストパラメータ生成手段21はコスト予測データを生成するようにしたので、装置全体としての演算量を減らすことができる。そのため、出発地点、目的地点、閾値等があらかじめ定まっているような、安全性に係る要件を満たす避航予測データを有するエッジを早い段階で確定できる場合には、装置全体としての処理時間を短縮することができる。
【0035】
実施の形態3.
上述の実施の形態1では、閾値入力手段13から閾値を入力できるようにしたが、これに限定するものではない。例えば、船舶安全に関する各パラメータについて、あらかじめ定めた複数の閾値を選択等ができるようにしておく。そして、閾値入力手段13の入力に基づいて、選択された閾値を閾値データとするようにしてもよい。このようにして、あらかじめ定めた閾値を選択できるようにしておくことで、運航者等の閾値入力負担を軽減することができる。また、異常な閾値の入力ミスを排除することができる。
【0036】
実施の形態4.
上述の実施の形態1等では、航路探索手段23が行う探索処理において、ダイクストラ法による探索を行ったが、これに限定するものではなく、他の最適経路探索アルゴリズムを用いて最適航路の探索を行うこともできる。例えば2点間の経路探索に有力なA* (エースター)アルゴリズムを用いて探索を行うこともできる。A* アルゴリズムでは、ノード及びノード間のパスを設定し、さらに各パスのコスト(負担:ダイクストラ法における重みに相当する)を設定する。そして、スタートノードからゴールノードに到るまでの最短パスを探索する。最適経路探索アルゴリズムとしてA* アルゴリズムを用いるようにしても、ダイクストラ法と同様に、最短経路探索を少ない時間で行うことができる。
【0037】
実施の形態5.
図4は本発明の実施の形態5に係る運航支援システムの構成例を表す図である。本実施の形態のシステムは、上述の実施の形態で説明した運航支援装置を構成する各手段等を、処理機能等に応じて、陸上側システム100と船側システム200とに分けたものである。
【0038】
陸上側システム100は、海気象データ入力手段12、最適航路演算装置20(コストパラメータ生成手段21、避航支援パラメータ生成手段22及び航路探索手段23)、記憶装置30(海気象データ記憶手段31、個船データ記憶手段32、閾値データ記憶手段33及び予測データ記憶手段34)並びに陸上側通信装置50で構成する。ここで、陸上側通信装置50は、最適航路データ等を含む信号を無線送信する。また、海気象データ等、船側システム200が必要とする各種データを含む信号を無線送信する。また、船側システム200から送られた信号を受信し、最適航路演算装置20にデータとして入力する。
【0039】
一方、船側システム200は、例えば、指示入力手段11、閾値入力手段13、表示装置40、船側通信装置60、データ処理装置70及び船側記憶装置80で構成する。船側通信装置60は、陸上側通信装置50と対となり、最適航路データ等、各種データを含む信号の送受信を行う。
【0040】
データ処理装置70は、例えば指示入力手段11、閾値入力手段13から入力されたデータを含む信号を船側通信装置60から送信させるための処理を行う。また、船側記憶装置80に記憶されている地図のデータ等と共に、船側通信装置60が受信した信号に含まれる最適航路データに基づく航路表示を行う処理を行い表示装置40に表示させる。また、海気象データに基づく表示等の処理を行う。船側記憶装置80は、データ処理装置70が表示処理を行うための地図等のデータを記憶する。また、場合によっては、閾値データ等のデータについても記憶する。
【0041】
運航支援システムにおける最適航路の探索処理については、陸上側通信装置50、船側通信装置60により、陸上側システム100と船側システム200との間で通信を行って、データに係る信号の送受信を行うが、最適航路探索に係る基本的な処理の流れについては、実施の形態1、2等と同じである。
【0042】
以上のような運航支援システムを構成することにより、予測データ生成処理、探索処理、海気象データの船上への送信等、処理速度を必要とする処理は、陸上側システム100において短時間で行うことができる。また、船側システム200においては、航行中においても、最新の海気象データに基づいて最適航路を確認等することができる。
【0043】
実施の形態6.
上述の実施の形態5では、陸上側システム100に航路探索手段23を設けるようにしたが、例えば船側システム200に設けるようにしてもよい。この場合は、航路探索に必要な予測データの通信を行う。また、現在の海気象データに関する実測データを船側システム200から提供するようにしてもよい。
【符号の説明】
【0044】
11 指示入力手段
12 海気象データ入力手段
13 閾値入力手段
20 最適航路演算装置
21 コストパラメータ生成手段
22 避航支援パラメータ生成手段
23 航路探索手段
30 記憶装置
31 海気象データ記憶手段
32 個船データ記憶手段
33 閾値データ記憶手段
34 予測データ記憶手段
40 表示装置
50 陸上側通信装置
60 船側通信装置
70 データ処理装置
80 船側記憶装置
100 陸上側システム
200 船側システム
【技術分野】
【0001】
本発明は、船舶の航路を探索するシステムに関するものである。特に荒天避航を重視した上で、最適な航路を短時間で効率よく探索するための装置及びシステムに関するものである。
【背景技術】
【0002】
船舶が航行を行う際には、現在、航海中に遭遇が予測される様々な海気象に関するデータ(以下、海気象データという)に基づいて、事前に航路等の航海計画を立案しておくことが一般的に行われている。そして、航海計画の立案を支援し、航路設定等を行うシステムが提案されている(例えば特許文献1参照)。そして、航路設定においては、航行時間、燃料消費量等のコストが少なくなるように設定するのが一般的である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−162117号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、本来、航行を行う際にはコストよりも航行の安全をさらに重視すべきことが課題である。上述の特許文献においても座礁等の事故を起こし易い海域を危険海域とし、危険海域を航路として選択することを避けるようにしている。ただ、危険海域を航路から外すことは、航路計画の立案を行う上では一般的に行われていることであるし、危険海域でなければ航行が安全であるというわけではない。
【0005】
例えば荒天の場合には、波、風等により、船体が揺れ動き、傾いたり、海水等が船体とぶつかって衝撃が加わったり、プロペラが海上に露出したりする。これにより船体、主機等の損傷、亀裂等の原因となる。また、船員が危険に晒されたり、船酔い、甲板上の艤装品への浸水、損傷等が生じることがある。そして、貨物船等であれば荷崩れや、海水打ち込み等による荷物への浸水等が生じる可能性もある。このような船舶の安全性を脅かす現象を回避し、航行の安全性を確保するような判断は、基本的に船長等のような運航者が航行前又は航行中に行うことが多かった。また、(例えば特許文献1の方法による)計画航路の結果を見ながら、船舶の安全性に問題があると判断される場合には、安全性の問題が解決されるまで、航路変更の検討を繰り返し行うことになる。
【0006】
そこで、本発明は上記のような問題点を解決し、船舶(船体、乗務員、荷物等を含む)の安全性を含めた最適な航路を効率よく探索する運航支援システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る運航支援装置は、出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段と、海気象データと個船データとに基づいて、ノード間における船舶安全に関する1又は複数のパラメータについて、算出した予測値又は海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段と、コスト予測データ及び避航予測データを少なくとも記憶する記憶装置と、記憶装置に記憶された避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、出発地点から目的地点において、閾値データが示す範囲を満たすノード間の航路を抽出し、コスト予測データに基づいて、抽出したノード間の航路の中から目的地までの最適航路を探索する航路探索手段とを備えるものである。
【発明の効果】
【0008】
本発明によれば、航路探索手段が、避航支援パラメータ生成手段が生成した避航予測データと閾値データとに基づいて、抽出したノード間の航路の中から、出発地点から目的地点までの最適な航路を探索するようにしたので、安全性に係る要件を満たす航路を探索した上で運航者等に提示することができる。そのため、基本的には、運航者は探索された航路を確認するだけでよくなる。また、避航等を行うために最適航路の探索処理を複数回やり直す等、時間、労力等の無駄を防ぐことができる。さらに、閾値データを定めておくことで、安全性に係る判断が運航者等により左右されることなく、一律に行うことができる。また、人が判断することにより生じ得る見落とし等の人為的なミスを防ぐことができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態1に係る運航支援装置の構成を表す図である。
【図2】実施の形態1に係る最適航路演算装置20の処理の流れを表す図である。
【図3】実施の形態2に係る最適航路演算装置20の処理の流れを表す図である。
【図4】本発明の実施の形態5に係る運航支援システムの構成例を表す図である。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は本発明の実施の形態1に係る運航支援装置の構成を表す図である。図1の運航支援装置は、特に入力される各種データに基づいて演算等を行い、航路を探索するための処理を行うものである。
【0011】
ここで、本実施の形態における運航支援装置の航路探索処理においては、海域等の航行域について、例えば緯度、経度方向を所定の間隔(例えば2.5度間隔)で格子(メッシュ)状に区切った各交点をノードとして設定するようにしておく。この間隔の数値は、緯度、経度それぞれに任意に定めることができる。そして、船舶は航行する際、ノード間(エッジ)を移動していくものとする。そのため、例えばあるノードとその周囲のノード間が運航支援装置が探索する航路の最小単位となる。そして、航路探索処理においては、あるノードから次のノードへのエッジのうち、安全性、コスト(経済性等)の面から最良と判断したエッジをつなげていくことで、例えば出発地点(航行中における現在地点を含む)から目的地点まで、最適な航路を探索することとなる。
【0012】
図1において、指示入力手段11は、例えば運航者等が、出発地点、目的地点等、また、航路探索に参照すべきコスト(例えば燃料消費量等)に関する指示に係るデータを入力するための手段である。ここでは、特に示していないが、例えば現在地点のデータ等は、GPS(Global Positioning System :全地球測位システム)によって測位したデータを自動的に入力する等、指示に係るデータの入力は必ずしも運航者等によらなくてもよい。
【0013】
海気象データ入力手段12は、例えば外部の装置(システム)から、各ノードにおける例えば現在〜1週間先の海気象に関するデータ(例えば波高、風速等。以下、海気象データという)を入力するための手段である。ここで、海気象データ入力手段12は、さらに記憶装置30に記憶するための処理を行うものとする。本実施の形態では、コストパラメータ生成手段21及び避航支援パラメータ生成手段22は、ともに海気象データを演算のために用いる。
【0014】
閾値入力手段13は、最適航路演算装置20の航路探索手段23が後述する避航予測データに基づいて航路を探索処理する際、危険からの回避をはかり、安全性に係り、許容できる限界等を判断するための基準(条件)となる閾値を閾値データとして入力するための手段である。ここで、閾値入力手段13は、さらに記憶装置30に記憶するための処理を行うものとする。閾値に関しては、例えば絶対値を閾値として、探索処理の際に、±閾値によって範囲に基づく判断を行うものもある(正の値しかない場合には、0〜閾値、閾値以上等の範囲を扱う場合もある)。閾値入力手段13により閾値を入力できるようにすることで、閾値を変更した場合の航路確認等を行うことができる。また、起こりうる事象の発生確率を閾値としてもよい。なお、ここでは別の手段で構成しているが、例えば指示入力手段11と同じ手段で構成してもよい。
【0015】
記憶装置30は、本実施の形態においては、海気象データ記憶手段31、個船データ記憶手段32、閾値データ記憶手段33及び予測データ記憶手段34で構成するものとする。海気象データ記憶手段31は、海気象データ入力手段12を介して入力された海気象データを記憶する。また、個船データ記憶手段32には個船データを記憶する。記憶される個船データは、各船舶が個別に有する船体及び主機(ディーゼルエンジン等)の基本性能に関するデータである。ここでは、船舶固有の性能のデータを処理するために個船データを記憶するが、例えば船舶の種類毎に基づく概略の性能を表すデータを記憶して処理を行うようにしてもよい。また、ここでは個船データを固定したデータと扱うようにするが、荷物の種類、積載重量等により性能が変化することがあるため、場合によっては、個船データの一部又は全部を航行毎に変更等できるようにしてもよい。
【0016】
さらに閾値データ記憶手段33には、閾値入力手段13を介して入力された閾値データを記憶する。そして、予測データ記憶手段34には、後述するように、コストパラメータ生成手段21、避航支援パラメータ生成手段22が生成したコスト予測データ及び避航予測データ(これらをまとめた場合には予測データという)を記憶する。
【0017】
最適航路演算装置20は、本実施の形態においては、コストパラメータ生成手段21、避航支援パラメータ生成手段22、航路探索手段23で構成する。ここで、最適航路演算装置20の各手段について、それぞれ異なる専用機器(ハードウェア)で構成することもできる。また、例えば、CPU(Central Processing Unit )を中心とする演算制御手段(コンピュータ)で1又は複数のハードウェアを構成し、各手段が行う処理手順をあらかじめプログラム化し、ソフトウェア、ファームウェア等で構成しておくこともできる。このとき、最適航路演算装置20がそのプログラムを実行して、プログラムに基づく処理を行うことにより、上記の各手段が行う処理を実現するようにする。これらのプログラムに係るデータは例えば記憶装置30等に記憶しておくようにする。
【0018】
コストパラメータ生成手段21は、エッジのコストに関するパラメータの予測値を算出してデータ(コスト予測データ)を生成する。算出するコストの種類としては、例えば燃料消費量、船速(航行時間)等がある。コストパラメータ生成手段21は、個船データ記憶手段32が記憶する個船データ及び海気象データ記憶手段31が記憶する海気象データに基づいて、1又は複数のコストに係るコスト予測データを生成し、予測データ記憶手段34に記憶させる。ここで、本実施の形態においては、航路として通過し得るすべてのエッジ(ノード間)について、コスト予測データを生成するものとする。
【0019】
また、避航支援パラメータ生成手段22も、例えば個船データ及び海気象データに基づいて、設定されたエッジの船舶安全に関するパラメータの予測値を算出等したデータ(避航予測データ)を生成する。ここで、避航予測データについて、例えば、海水打ち込みの発生確率、波浪衝撃力等については算出を行って生成する。また、例えば波高、波周期、波向き、風速、風向き等の、船舶の安全性と密接に関連する海気象については、例えば海気象データをそのまま避航予測データとして用いるようにしてもよい。
【0020】
ここで、本実施の形態では、コストパラメータ生成手段21、避航支援パラメータ生成手段22では、海気象データが変更される度に、それぞれ演算等を行い、コスト予測データ、避航予測データを生成し、更新を行うものとする。そのため、最新の海気象データに基づく予測データを得ることができる。
【0021】
航路探索手段23は、予測データ記憶手段34に記憶されているコスト予測データ及び避航予測データに基づいて、指示入力手段11から入力された出発地点から目的地点までの航路を探索処理して最適航路データを生成する。探索処理については、例えば、避航支援パラメータ生成手段22が生成した避航予測データと閾値データ記憶手段33に記憶された閾値データに基づいて、安全性に係る要件(例えば風速30m/s以下等)を満たす範囲(域)内にある避航予測データを有するエッジを抽出する。そして、さらに抽出したエッジから、コスト予測データに基づいて、例えば、燃料消費量、航行時間等、コスト的に最適と判断したエッジ(航路)を探索していって最適航路データを生成する。
【0022】
ここで、航路探索手段23の最適航路データの生成に関し、抽出したエッジからの最適経路探索アルゴリズムとしてダイクストラ(Dijkstra)法を用いて行うものとする。ダイクストラ法とは、ノード間を結ぶエッジに対して重みをつけ、その重みに基づく演算により、最小となる経路を探索する手法である。本実施の形態では、例えば燃料消費量、航行時間等のコストに対してコストパラメータ生成手段21が演算して算出した予測値を重みとし、航路探索手段23はコスト予測データに基づいて経路探索を行う。
【0023】
表示装置40は、航路探索手段23の探索処理により生成した最適航路データに基づいて、例えば地図(海図)に航路を重畳させ、運航者等に示すための航路図の表示を行う。また、特に限定するものではないが、コストパラメータ生成手段21、避航支援パラメータ生成手段22が生成した予測データ、海気象データ、閾値データ等の各種データを数値、グラフ等により表示することもできる。また、地図上に表示することもできる。また、航路比較のため、大圏航路(外乱等を考慮しない場合の最短航路)等を表示するようにしてもよい。運航者は、表示装置40に示される、安全性に係る要件を満たした航路の演算結果を参考に、その他の要件(運航者自身の経験、顧客の要請、等)を勘案しながら最終的な最適航路を決定することができる。ここで表示装置40による表示とは、画面上への表示およびプリンターへの出力等を含む。
【0024】
図2は実施の形態1に係る最適航路演算装置20における処理の流れの一例を表す図である。例えば、海気象データが海気象データ入力手段12から入力され、海気象データ記憶手段31に記憶されると、コストパラメータ生成手段21は、所定の種類のコストについて、予測値を算出してコスト予測データを生成し、予測データ記憶手段34に記憶させる(S1)。例えばコストの予測値については、燃料消費量等を算出する場合の所定の数式等に基づく算出を行う。
【0025】
また、避航支援パラメータ生成手段22はノード間の船舶安全に関するパラメータの予測値の算出等を行い、避航予測データを生成し、予測データ記憶手段34に記憶させる(S2)。ここで、避航支援パラメータ生成手段22がハードウェアとしてコストパラメータ生成手段21と別構成の場合は、コストパラメータ生成手段21の処理と並列して避航予測データの生成処理を行うことができる。
【0026】
そのため、船舶安全に関するパラメータの一例としては次のようなものがある。これらのパラメータのうち、例えば(1)、(2)については、海気象データを用いて避航予測データを生成することができる。
(1)波浪の大きさ(波高、波周期、波向き等)。
(2)風の強さ(風速、風向き等)。
(3)船首甲板上への海水打ち込みに係るパラメータ(発生荷重の大きさ、海水打ち込みが発生する頻度(発生確率(例えば10回に1回))等)。
(4)波浪衝撃力に係るパラメータ(衝撃力の大きさ、波浪衝撃が発生する頻度(発生確率(例えば100回に1回))等)。
(5)プロペラ(スクリュー)露出の発生確率等。
(6)船体のある位置における加速度に係るパラメータ(加速度の大きさ、限界値を超える確率等)。
(7)船体運動に係るパラメータ(各種運動量の大きさ、限界値を超える確率等)。
【0027】
避航支援パラメータ生成手段22は、1又は複数のパラメータに基づく避航予測データを生成する。ここで、船舶の種類、形状、大きさ等によって、優先すべきパラメータは基本的に異なる。また、船舶だけでなく、荷物の積載量、価値等によっても異なることがある。さらに、航行する海域等によっても異なる。このため、避航予測データを生成するパラメータの種類等については、船舶毎、航行毎に異なってもよく、特に限定するものではない。また、演算量を低減するという観点からはパラメータをあらかじめ定めておく方がよいが、例えば、避航支援パラメータ生成手段22において、算出等可能なパラメータに基づく避航予測データをすべて生成し、航路探索手段23において、閾値データにより規定することもできる。また、例えば上述のパラメータに限らず、安全性の確保に関して定量化が可能な別のパラメータ(現象)に基づく避航予測データを生成するようにしてもよい。
【0028】
航路探索手段23は、避航支援パラメータ生成手段22が生成した避航予測データと閾値データ記憶手段33に記憶された閾値データに基づいて、安全性に係る要件を満たす避航予測データを有するエッジを抽出する(S3)。ここで、閾値については、船舶の種類、形状、大きさ等によって許容できる閾値が異なる。荷物が海水に浸される損害は、浸された荷物の量と価値で大きく変化するため、閾値も変化する。また、航海計画時におけるリスクのとり方によっても異なる。例えば、閾値を設定しなかった(閾値データがない)場合には、どのような予測値を有する避航予測データ(エッジ)でも抽出対象とすることが可能になる。
【0029】
航路探索手段23は、さらに抽出したエッジに係るコスト予測データに基づいて、ダイクストラ法を用いて、指示入力手段11から入力された出発地点から目的地点までのエッジを探索処理して最適航路データを生成する(S4)。そして、最適航路データに基づく航路を表示装置40に表示させる(S5)。ここで、航路探索手段23におけるS3以降の探索処理については、コストパラメータ生成手段21及び避航支援パラメータ生成手段22が予測データの生成後、すぐに行う必要はなく、例えば、指示入力手段11から出発地点等の入力等の指示があった後等であってもよい。
【0030】
以上のように、実施の形態1の運航支援装置によれば、航路探索手段23が、避航支援パラメータ生成手段22が生成した避航予測データと閾値入力手段13の入力に係る閾値データとに基づいて、安全性の要件を満たすエッジを抽出し、抽出したエッジの中から、出発地点から目的地点までの最適な航路を探索するようにしたので、安全性に係る要件を満たす航路を探索した上で運航者等に提示することができる。そのため、基本的には、運航者は表示装置40に表示された最適航路を確認するだけでよくなる。また、航路の再検討を行う場合でも、閾値入力手段13に入力する閾値データを変更するだけでよくなる。そして、避航等を行うために、演算結果を見ながら、最適航路の探索処理を複数回やり直す等、時間、労力等の無駄を防ぐことができる。また、閾値データを数値として定量的に定めておくことで、安全性に係る判断が運航者等により左右されることなく、一律に行われるようになる。また、人が判断することにより生じ得る見落とし等の人為的なミスを防ぐことができる。
【0031】
実施の形態2.
図3は本発明の実施の形態2に係る最適航路演算装置20における処理の流れについて、別の例を表す図である。上述の実施の形態では、コストパラメータ生成手段21及び避航支援パラメータ生成手段22が予測データを生成した後に、航路探索手段23が処理を行い、最適な航路を探索した。本実施の形態では、装置全体としての演算量を低減させるために、避航予測データと閾値データとに基づいて安全性に係る要件を満たす避航予測データを有するエッジを抽出した後、コストパラメータ生成手段21は、抽出したエッジにおけるコスト予測データを生成するようにしたものである。
【0032】
図3において、避航支援パラメータ生成手段22はノード間の船舶安全に関するパラメータの予測値の算出等を行い、避航予測データを生成する(S11)。生成する避航予測データについては、実施の形態1の説明と同様である。そして、航路探索手段23は、避航支援パラメータ生成手段22が生成した避航予測データと閾値データ記憶手段33に記憶された閾値データに基づいて、安全性に係る要件を満たす避航予測データを有するエッジを抽出する(S12)。
【0033】
次に、コストパラメータ生成手段21は、航路探索手段23が抽出したエッジについて、コスト予測データを生成し、予測データ記憶手段34に記憶させる(S13)。そして、抽出したエッジに係るコスト予測データに基づいて、ダイクストラ法を用いて、指示入力手段11から入力された出発地点から目的地点までのエッジを探索処理して最適航路データを生成し(S14)、最適航路データに基づく航路を表示装置40に表示させる(S15)。
【0034】
以上のように、実施の形態2の運航支援装置によれば、避航支援パラメータ生成手段22が生成した避航予測データと閾値データとに基づいて航路探索手段23が抽出したエッジについて、コストパラメータ生成手段21はコスト予測データを生成するようにしたので、装置全体としての演算量を減らすことができる。そのため、出発地点、目的地点、閾値等があらかじめ定まっているような、安全性に係る要件を満たす避航予測データを有するエッジを早い段階で確定できる場合には、装置全体としての処理時間を短縮することができる。
【0035】
実施の形態3.
上述の実施の形態1では、閾値入力手段13から閾値を入力できるようにしたが、これに限定するものではない。例えば、船舶安全に関する各パラメータについて、あらかじめ定めた複数の閾値を選択等ができるようにしておく。そして、閾値入力手段13の入力に基づいて、選択された閾値を閾値データとするようにしてもよい。このようにして、あらかじめ定めた閾値を選択できるようにしておくことで、運航者等の閾値入力負担を軽減することができる。また、異常な閾値の入力ミスを排除することができる。
【0036】
実施の形態4.
上述の実施の形態1等では、航路探索手段23が行う探索処理において、ダイクストラ法による探索を行ったが、これに限定するものではなく、他の最適経路探索アルゴリズムを用いて最適航路の探索を行うこともできる。例えば2点間の経路探索に有力なA* (エースター)アルゴリズムを用いて探索を行うこともできる。A* アルゴリズムでは、ノード及びノード間のパスを設定し、さらに各パスのコスト(負担:ダイクストラ法における重みに相当する)を設定する。そして、スタートノードからゴールノードに到るまでの最短パスを探索する。最適経路探索アルゴリズムとしてA* アルゴリズムを用いるようにしても、ダイクストラ法と同様に、最短経路探索を少ない時間で行うことができる。
【0037】
実施の形態5.
図4は本発明の実施の形態5に係る運航支援システムの構成例を表す図である。本実施の形態のシステムは、上述の実施の形態で説明した運航支援装置を構成する各手段等を、処理機能等に応じて、陸上側システム100と船側システム200とに分けたものである。
【0038】
陸上側システム100は、海気象データ入力手段12、最適航路演算装置20(コストパラメータ生成手段21、避航支援パラメータ生成手段22及び航路探索手段23)、記憶装置30(海気象データ記憶手段31、個船データ記憶手段32、閾値データ記憶手段33及び予測データ記憶手段34)並びに陸上側通信装置50で構成する。ここで、陸上側通信装置50は、最適航路データ等を含む信号を無線送信する。また、海気象データ等、船側システム200が必要とする各種データを含む信号を無線送信する。また、船側システム200から送られた信号を受信し、最適航路演算装置20にデータとして入力する。
【0039】
一方、船側システム200は、例えば、指示入力手段11、閾値入力手段13、表示装置40、船側通信装置60、データ処理装置70及び船側記憶装置80で構成する。船側通信装置60は、陸上側通信装置50と対となり、最適航路データ等、各種データを含む信号の送受信を行う。
【0040】
データ処理装置70は、例えば指示入力手段11、閾値入力手段13から入力されたデータを含む信号を船側通信装置60から送信させるための処理を行う。また、船側記憶装置80に記憶されている地図のデータ等と共に、船側通信装置60が受信した信号に含まれる最適航路データに基づく航路表示を行う処理を行い表示装置40に表示させる。また、海気象データに基づく表示等の処理を行う。船側記憶装置80は、データ処理装置70が表示処理を行うための地図等のデータを記憶する。また、場合によっては、閾値データ等のデータについても記憶する。
【0041】
運航支援システムにおける最適航路の探索処理については、陸上側通信装置50、船側通信装置60により、陸上側システム100と船側システム200との間で通信を行って、データに係る信号の送受信を行うが、最適航路探索に係る基本的な処理の流れについては、実施の形態1、2等と同じである。
【0042】
以上のような運航支援システムを構成することにより、予測データ生成処理、探索処理、海気象データの船上への送信等、処理速度を必要とする処理は、陸上側システム100において短時間で行うことができる。また、船側システム200においては、航行中においても、最新の海気象データに基づいて最適航路を確認等することができる。
【0043】
実施の形態6.
上述の実施の形態5では、陸上側システム100に航路探索手段23を設けるようにしたが、例えば船側システム200に設けるようにしてもよい。この場合は、航路探索に必要な予測データの通信を行う。また、現在の海気象データに関する実測データを船側システム200から提供するようにしてもよい。
【符号の説明】
【0044】
11 指示入力手段
12 海気象データ入力手段
13 閾値入力手段
20 最適航路演算装置
21 コストパラメータ生成手段
22 避航支援パラメータ生成手段
23 航路探索手段
30 記憶装置
31 海気象データ記憶手段
32 個船データ記憶手段
33 閾値データ記憶手段
34 予測データ記憶手段
40 表示装置
50 陸上側通信装置
60 船側通信装置
70 データ処理装置
80 船側記憶装置
100 陸上側システム
200 船側システム
【特許請求の範囲】
【請求項1】
出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段と、
前記海気象データと前記個船データとに基づいて、前記ノード間における船舶安全に関する1又は複数のパラメータについて、算出した予測値又は前記海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段と、
前記コスト予測データ及び前記避航予測データを少なくとも記憶する記憶装置と、
該記憶装置に記憶された前記避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、前記出発地点から前記目的地点において、前記閾値データが示す範囲を満たす前記ノード間の航路を抽出し、前記コスト予測データに基づいて、抽出した前記ノード間の航路の中から前記目的地までの最適航路を探索する航路探索手段と
を備えることを特徴とする運航支援装置。
【請求項2】
前記コストパラメータ生成手段は、前記航路探索手段が前記避航予測データ及び前記閾値データに基づいて抽出した前記ノード間の航路について、前記コスト予測データを生成することを特徴とする請求項1記載の運航支援装置。
【請求項3】
前記航路探索手段が処理を行う前記閾値データの入力又は変更を行うための閾値入力手段をさらに備えることを特徴とする請求項1又は2記載の運航支援装置。
【請求項4】
前記航路探索手段が処理を行う前記閾値データを、あらかじめ定められた複数の閾値の中から選択することができる閾値入力手段をさらに備えることを特徴とする請求項1又は2記載の運航支援装置。
【請求項5】
前記航路探索手段は、避航支援パラメータ生成手段が複数のパラメータについて生成した避航予測データのうち、前記閾値データが設定されたパラメータに係る前記避航予測データに基づいて前記閾値データが示す範囲を満たすかどうかの判断を行い、前記ノード間の航路を抽出することを特徴とする請求項1〜4のいずれかに記載の運航支援装置。
【請求項6】
該航路探索手段が探索した最適航路に基づいて航路図を表示する表示装置をさらに備えることを特徴とする請求項1〜5のいずれかに記載の運航支援装置。
【請求項7】
出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段と、
前記海気象データと前記個船データとに基づいて、前記ノード間における船舶安全に関する1又は複数のパラメータについて、算出した予測値又は前記海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段、
前記コスト予測データ及び前記避航予測データを少なくとも記憶する記憶装置、
該記憶装置に記憶された前記避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、前記出発地点から前記目的地点において、前記閾値データが示す範囲を満たす前記ノード間の航路を抽出し、前記コスト予測データに基づいて、抽出した前記ノード間の航路の中から前記目的地までの最適航路を探索する航路探索手段、及び、
該航路探索手段が探索した最適航路に係るデータを含む信号を無線通信により送信するための陸上側通信手段を有する陸上側システムと、
前記陸上側通信手段と無線通信を行って、前記最適航路に係るデータを含む信号を受信するための船側通信手段、
前記最適航路に係るデータを処理するデータ処理手段、及び、
該データ処理手段の処理に基づいて、前記最適航路に係る航路図を表示する表示装置を有する船側システムと
を備えることを特徴とする運航支援システム。
【請求項1】
出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段と、
前記海気象データと前記個船データとに基づいて、前記ノード間における船舶安全に関する1又は複数のパラメータについて、算出した予測値又は前記海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段と、
前記コスト予測データ及び前記避航予測データを少なくとも記憶する記憶装置と、
該記憶装置に記憶された前記避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、前記出発地点から前記目的地点において、前記閾値データが示す範囲を満たす前記ノード間の航路を抽出し、前記コスト予測データに基づいて、抽出した前記ノード間の航路の中から前記目的地までの最適航路を探索する航路探索手段と
を備えることを特徴とする運航支援装置。
【請求項2】
前記コストパラメータ生成手段は、前記航路探索手段が前記避航予測データ及び前記閾値データに基づいて抽出した前記ノード間の航路について、前記コスト予測データを生成することを特徴とする請求項1記載の運航支援装置。
【請求項3】
前記航路探索手段が処理を行う前記閾値データの入力又は変更を行うための閾値入力手段をさらに備えることを特徴とする請求項1又は2記載の運航支援装置。
【請求項4】
前記航路探索手段が処理を行う前記閾値データを、あらかじめ定められた複数の閾値の中から選択することができる閾値入力手段をさらに備えることを特徴とする請求項1又は2記載の運航支援装置。
【請求項5】
前記航路探索手段は、避航支援パラメータ生成手段が複数のパラメータについて生成した避航予測データのうち、前記閾値データが設定されたパラメータに係る前記避航予測データに基づいて前記閾値データが示す範囲を満たすかどうかの判断を行い、前記ノード間の航路を抽出することを特徴とする請求項1〜4のいずれかに記載の運航支援装置。
【請求項6】
該航路探索手段が探索した最適航路に基づいて航路図を表示する表示装置をさらに備えることを特徴とする請求項1〜5のいずれかに記載の運航支援装置。
【請求項7】
出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段と、
前記海気象データと前記個船データとに基づいて、前記ノード間における船舶安全に関する1又は複数のパラメータについて、算出した予測値又は前記海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段、
前記コスト予測データ及び前記避航予測データを少なくとも記憶する記憶装置、
該記憶装置に記憶された前記避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、前記出発地点から前記目的地点において、前記閾値データが示す範囲を満たす前記ノード間の航路を抽出し、前記コスト予測データに基づいて、抽出した前記ノード間の航路の中から前記目的地までの最適航路を探索する航路探索手段、及び、
該航路探索手段が探索した最適航路に係るデータを含む信号を無線通信により送信するための陸上側通信手段を有する陸上側システムと、
前記陸上側通信手段と無線通信を行って、前記最適航路に係るデータを含む信号を受信するための船側通信手段、
前記最適航路に係るデータを処理するデータ処理手段、及び、
該データ処理手段の処理に基づいて、前記最適航路に係る航路図を表示する表示装置を有する船側システムと
を備えることを特徴とする運航支援システム。
【図1】


【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2010−237755(P2010−237755A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−82129(P2009−82129)
【出願日】平成21年3月30日(2009.3.30)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月30日(2009.3.30)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
[ Back to top ]