
運転アシストシステム
【課題】、効率的な運転アシストを行うことが可能な運転アシストシステムを提供する。
【解決手段】本発明の運転アシストシステムは、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段(ステップS205)と、少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段(ステップS206)と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作(ステップS209)を行う運転アシスト手段と、を有することを特徴とする。
【解決手段】本発明の運転アシストシステムは、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段(ステップS205)と、少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段(ステップS206)と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作(ステップS209)を行う運転アシスト手段と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され車両の運転をアシストする運転アシスト装置に関する。
【背景技術】
【0002】
従来より、目的地がセットされると、距離や時間に関して最適でかつ安全なルートを提供するのみならず、車両の燃料消費量に関して最適ルート案内を行う運転アシストシステムが知られている。
【0003】
上記のような運転アシストシステムの一例として、特許文献1(特開2009−133779号公報)には、記憶部と制御部とを少なくとも備えた、車両の運転支援装置であって、上記記憶部は、地図情報を記憶し、上記制御部は、上記車両の現在地を取得する現在地取得手段と、上記地図情報から目的地を設定する目的地設定手段と、上記現在地取得手段により取得された上記現在地から上記目的地までの目標到着時刻を設定し上記記憶部に格納する目標到着時刻設定手段と、上記車両の上記現在地から上記目的地までの目標燃費を設定し上記記憶部に格納する目標燃費設定手段と、上記記憶部に格納された上記目標到着時刻と上記目標燃費と上記地図情報とに基づいて、上記車両の上記現在地から上記目的地までの経路の走行計画を生成し上記記憶部に格納する走行計画生成手段と、を備えたことを特徴とする運転アシストシステムが開示されている。
【特許文献1】特開2009−133779号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的までのルート中において、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように、運転のスケジューリングを行うことが理想であるが、従来のような運転アシストシステムでは、信号機における信号の変動などの、時間的に変化する事象が考慮された上で、運転アシストがなされているわけではないので、必ずしも効率的な運転アシストを行うことができない、という問題があった。
【課題を解決するための手段】
【0005】
上記問題点を解決するために、請求項1に係る発明は、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する評価関数を算出する評価関数算出手段と、少なくとも前記評価関数を含む累積評価関数を算出する累積評価関数算出手段と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする。
【0006】
また、請求項2に係る発明は、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段と、それぞれの評価ポイントにおいて、周辺交通状況と自車両速度に応じて変動する第2評価関数を算出する第2評価関数算出手段と、それぞれの評価ポイントにおいて、運転者の運転操作に応じて変動する第3評価関数を算出する第3評価関数算出手段と、前記第1評価関数と前記第2評価関数と前記第3評価関数の累積評価関数を算出する累積評価関数算出手段と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする。
【0007】
また、請求項3に係る発明は、請求項1又は請求項2に記載の運転アシストシステムにおいて、前記第1評価関数が、現在地と目的地との間に設置される信号機における信号の時間変動に応じ変動することを特徴とする。
【0008】
また、請求項4に係る発明は、請求項1乃至請求項3のいずれかに記載の運転アシストシステムにおいて、運転アシスト動作が音声によるアシストであることを特徴とする。
【0009】
また、請求項5に係る発明は、請求項1乃至請求項4のいずれかに記載の運転アシストシステムにおいて、運転アシスト動作が表示によるアシストであることを特徴とする。
【0010】
また、請求項6に係る発明は、請求項1乃至請求項5のいずれかに記載の運転アシストシステムにおいて、運転アシスト動作がブレーキ制御によるアシストであることを特徴とする。
【発明の効果】
【0011】
本発明に係る運転アシストシステムは、それぞれの評価ポイントにおいて、時間に応じて変動する評価関数を算出する評価関数算出手段と、少なくともこのような評価関数を含む累積評価関数を算出する累積評価関数算出手段と、目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有するものであるので、本発明に係る運転アシストシステムによれば、信号機における信号の変動などの時間的に変化する事象が考慮された上で、運転アシストを行うので、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように運転アシストを行うなど、効率的な運転アシストを行うことが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る運転アシストシステムの概略を示す図である。
【図2】本発明の実施形態に係る運転アシストシステムのブロック構成の概略を示す図である。
【図3】本発明の実施形態に係る運転アシストシステムによる評価ポイント決定処理のフローチャートを示す図である。
【図4】決定ルートと評価ポイントとの関係を模式的に示す図である。
【図5】本発明の実施形態に係る運転アシストシステムによる運転アシスト処理・動作のフローチャートを示す図である。
【図6】本発明の実施形態に係る運転アシストシステムにおける評価関数算出サブルーチンのフローチャートを示す図である。
【図7】本発明の実施形態に係る運転アシストシステムにおける第1評価関数bj,1(t)算出処理サブルーチンのフローチャートを示す図である。
【図8】本発明の実施形態に係る運転アシストシステムにおける第2評価関数bj,2(v,vo)算出処理サブルーチンのフローチャートを示す図である。
【図9】本発明の実施形態に係る運転アシストシステムにおける第3評価関数bj,3(a,ta)算出処理サブルーチンのフローチャートを示す図である。
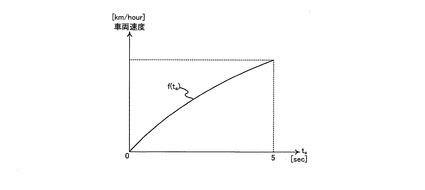
【図10】理想加速曲線の関数f(ta)を示す図である。
【発明を実施するための形態】
【0013】
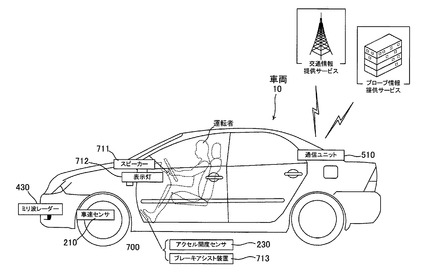
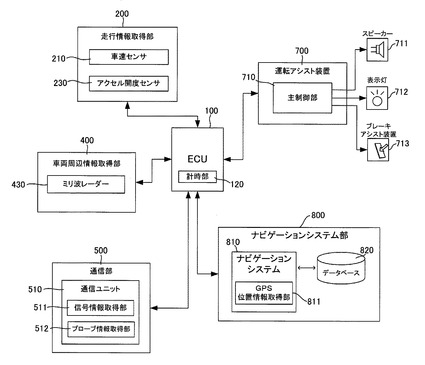
以下、本発明の実施の形態を図面を参照しつつ説明する。図1は本発明の実施形態に係る運転アシストシステムの概略を示す図であり、図2は本発明の実施形態に係る運転アシストシステムのブロック構成の概略を示す図である。図1及び図2において、10は車両、100はECU、120は計時部、200は走行情報取得部、210は車速センサ、230はアクセル開度センサ、400は車両周辺情報取得部、430はミリ波レーダー、5
00は通信部、510は通信ユニット、511は信号情報取得部、512はプローブ情報取得部、700は運転アシスト装置、710は主制御部、711はスピーカー、712は表示灯、713はブレーキアシスト装置、800はナビゲーションシステム部、810はナビゲーションシステム、811はGPS位置情報取得部、820はデータベースをそれぞれ示している。本実施形態の運転アシストシステム100は、原動機としてエンジンを搭載し、このエンジンの駆動力により走行を行う自動車、或いは、原動機としてモーターを搭載し、モーターの駆動力のみによる走行を行う電気自動車、或いは原動機として上記双方を搭載し、モーター及び/又はエンジンによる駆動に基づいて走行するハイブリッド車などの車両10に搭載することが可能である。
【0014】
図1及び図2に示す、本実施形態に係る運転アシストシステム100は、車両10に搭載された通信部500によって、交通情報提供サービス、プローブ情報提供サービスと無線通信することが想定されている。交通情報提供サービスは、車両10の通信部500を介して、車両10のシステムに信号機の信号変遷情報を提供することが可能なものであり、また、プローブ情報提供サービスは、車両10の通信部500を介して、車両10のシステムにプローブカーに基づく交通状態情報を提供することが可能なものである。
【0015】
上記のような交通情報提供サービスから情報提供を受けた運転アシストシステム100は、設置信号機の信号変遷情報をリアルタイムで受信することできる。また、プローブ情報提供サービスから情報提供を受けた運転アシストシステム100は、同一曜日の過去の履歴における交通の流れを解析することで、信号機の信号変遷情報の予想を行うことができるようになっている。
【0016】
運転アシストシステム100は、交通情報提供サービスから信号変遷情報を直接的に受信することが可能な場合には、交通情報提供サービスからの受信情報を利用するようにされているが、交通情報提供サービスから信号変遷情報を取得することができないような場合には、プローブ情報提供サービスからの情報提供に基づいて信号機の信号変遷情報を予測するようになっている。
【0017】
本実施形態に係る車載システムにおいて、ECU100はエレクトロニックコントロールユニットの略であり、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。ECU100は、図示されているECU100と接続される各構成と協働・動作する。また、ECU100は、本発明の運転アシストシステムにおける種々の制御処理は、ECU100内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。なお、特許請求の範囲に記載された「算出手段」、などは、このECU100の動作を上位概念的に表現したものである。なお、本実施形態においては、上記の各手段はECU100とECU100上で実行されるプログラムによって実現されるものとしているが、これらの各手段はこれに限定されるものではなく、論理回路などのハードウエアのみで実現されるようなものであってもよい。
【0018】
ECU100さらには、計時部120を備えており、この計時部120によって、時刻計測を行うことができるようになっている。この計時部120で計測される時刻情報と、プローブ情報提供サービスから受信した交通履歴情報とから、所定の時刻における信号変遷情報を予想することができるようになっている。
【0019】
走行情報取得部200は、車両10の実走行に関連する情報、或いは運転操作情報などを取得する構成であり、例えば、車速センサ210、アクセル開度センサ230などを少なくとも含むものである。
【0020】
走行情報取得部200における車速センサ210は、車両10の速度(自車両速度)のセンシング(計測)を行うようになっている。なお、車両の走行状況を取得するものとして、その他のセンサ類を設けるようにしてもよい。また、走行情報取得部200において、アクセル開度センサ230は運転者によるアクセルペダルの踏み込み量(アクセル開度)を検出するものである。
【0021】
車両周辺情報取得部400は、車両10周辺の車外の情報などを取得する構成であり、本実施形態では、車両10前方側を走行する車両などとの距離を計測することが可能なミリ波レーダー430を有している。なお、本実施形態においては、ミリ波レーダー430は車両10前方のみを撮影するように設けられているが、ミリ波レーダー430をより多く搭載して、前方に加え車両10後方を撮影するように構成することも可能である。このようなミリ波レーダー430から取得された前方車両との間の距離情報によって、例えば、車両周辺に存在する他車両の速度情報を解析することが可能となる。
【0022】
なお、本実施形態においては、車両周辺情報取得部400としてミリ波レーダー430を用いるようにしたが、車両10前方側、及び車両10後方側を撮像することが可能なステレオカメラユニット420を設けるなどしても良い。このようなステレオカメラユニット420は、ステレオの動画像を撮影が可能なものであり、さらにステレオカメラユニット420で取得された撮影データに基づいて、ECU100が画像解析を行うことにより、撮影された物体とステレオカメラユニット420との間の距離とが算出できるようになっている。これに基づいて、システムは車両周辺に存在する他車両の速度情報を解析することが可能となる。
【0023】
通信部500における通信ユニット510は、交通情報提供サービス、プローブ情報提供サービスとの無線通信を可能とするユニットである。この通信ユニット510における信号情報取得部511によって、交通情報提供サービスから設置信号機の信号変遷情報を取得することが可能となり、ECU100はこれにより信号の変遷をリアルタイムで把握することが可能となる。また、通信ユニット510におけるプローブ情報取得部512によって、プローブ情報提供サービスから、過去の履歴における交通の流れを受信することができ、これによりECU100は信号機の信号変遷の予想を行うことができるようになっている。
【0024】
運転アシスト装置700は、車両10の運転車に対し、運転支援を行う装置構成であり、音を発生し音声案内を行うことで、運転者に最適な運転操作のアシストを行うスピーカー711、点灯することによって運転者に最適な運転操作のアシストを行う表示灯712、ブレーキペダルを運転者に代わって踏み込む動作を行うことで、運転者の運転操作のアシストを行うブレーキアシスト装置713、そして、これらスピーカー711、表示灯712、ブレーキアシスト装置713を制御する主制御部710を有している。
【0025】
ナビゲーションシステム部800は、ナビゲーションシステム810やこのナビゲーションシステム810が参照する地図情報などのナビゲーションシステム用データベース820とからなっている。ナビゲーションシステム810は、GPS衛星からのGPS信号を受信して自らの位置座標データを計算するGPS位置情報取得部811を用いることによって、車両の現在位置情報を取得することができる。なお、ナビゲーションシステム810は、ユーザーが目的地を入力することが可能なインターフェイス(不図示)を備えており、このユーザーからの入力に基づき、ナビゲーションシステム用データベース820を参照し、現在地から目的地までのルートを検索可能なルート検索機能が備えられている。このようなルート検索機能としては従来周知のものを用いることができる。
【0026】
また、本発明の運転アシストシステムにおいては、ナビゲーションシステム用データベ
ース820には、道路情報、施設情報、信号機設置情報などが記憶されているが、道路情報には道路種別情報(一般道、高速道など)を設けておくことが好ましい。また、ナビゲーションシステム用データベース820の地図データには、スピードを出せるような郊外であるのか、或いはスピードが制限される都心であるかの別を示す領域分けデータが予め含まれていることが好ましい。上記のような道路種別情報や領域分けに応じて、後述する係数ai,jを定めるようにするとよい。
【0027】
次に、以上のように構成される運転アシストシステム100の処理について、フローチャート等を参照しながら説明する。本実施形態に係る運転アシストシステム100においては、ユーザー(運転者)によって入力された目的地に効率的に到着するように、運転アシストを行うような処理が実行されるようになっている。そこで、ユーザーによって目的地が設定されると、まずルートを決定し、そのルートにわたって評価ポイント(到着地の評価ポイントも含む)を設定する処理が行われる。そして、本実施形態に係る運転アシストシステム100においては、それぞれの評価ポイントにおいて(累積)評価関数が規定され、目的地の(累積)評価関数が最大となるような運転操作を行うように運転者に対してアシストを行う。以下、詳しく説明する。
【0028】
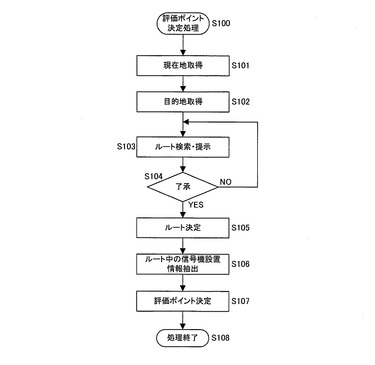
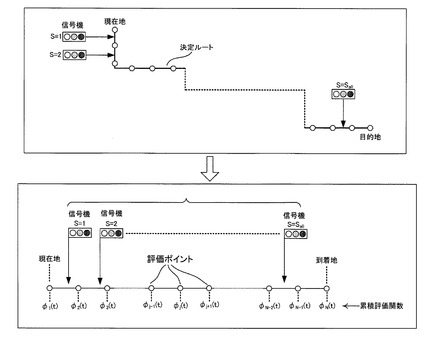
図3は本発明の実施形態に係る運転アシストシステムによる評価ポイント決定処理のフローチャートを示す図であり、図4は決定ルートと評価ポイントとの関係を模式的に示す図である。
【0029】
図3において、ステップS100において、評価ポイント決定処理が開始されると、続くステップS101では、ナビゲーションシステム部800におけるGPS位置情報取得部811で車両10の現在地が取得される。次のステップS102では、ユーザーによってナビゲーションシステム部800に入力された目的地が取得される。
【0030】
ステップS103では、ナビゲーションシステム部800でデータベース820が参照されて、ルート検索が行われ、この検索結果がユーザーに対して提示される。ステップS104では、提示されたルートに対して、ユーザーが了承したか否かが判定される。判定結果がYESであるときにはステップS105に進み、NOであるときにはステップS103に戻り、再度異なるルートを検索する。
【0031】
ステップS104における判定がYESであるときに進むステップS105では、ユーザーの了承を得たルートで決定がなされる。図4の上段は、決定されたルートを模式的に示す図である。ステップS106では、データベース820が参照されて、このような決定ルート中における信号機設置情報の抽出が行われる。本実施形態においては、図4に示すように、ルート中にS=1、S=2、・・・S=Sallの信号機が存在している場合を
例にとり説明する。ステップS107では、評価ポイントの決定が行われる。評価ポイントの決定方法としては、種々の方法があり得るが、例えば、本実施形態では現在地を第1の評価ポイント、目的地を第Nの評価ポイントとして、それらの間のルート中を(N+1)等分に分割することによって、1乃至Nの評価ポイントを得るようにしている。
【0032】
ここで、第1の評価ポイント(現在地)に対応して累積評価関数φ1(t)が、第2の
評価ポイントには累積評価関数φ2(t)が、・・・・第Nの評価ポイント(目的地)に
は累積評価関数φN(t)が、というように、それぞれのポイントにおいて累積評価関数
が規定される。本実施形態に係る運転アシストシステム100においては、このような累積評価関数が既定され、このような累積評価関数のうち、第Nの評価ポイント(目的地)における累積評価関数が最大となるように運転アシストを行うようにするものである。ステップS108では、評価ポイントの決定処理を終了する。
【0033】
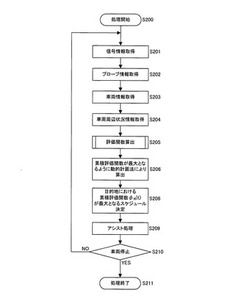
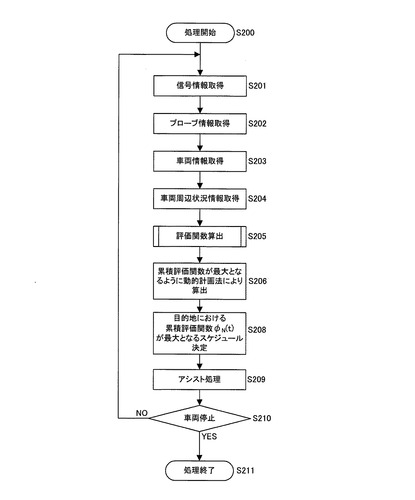
以上のように決定された評価ポイントに基づいて、車両10における運転アシストシステム100では運転アシストの動作・処理が実行される。以下、運転アシスト処理についてフローチャートなどを参照して説明する。図5は本発明の実施形態に係る運転アシストシステムによる運転アシスト処理・動作のフローチャートを示す図である。
【0034】
図5において、ステップS200で、運転アシストシステム100の処理が開始されると、続いてステップS201に進み、通信部500の信号情報取得部511によって、交通情報提供サービスから信号情報が取得される。ここでいう信号情報とは、現在地から目的地までに設置された信号機の信号変遷情報である。また、ステップS202では、通信部500のプローブ情報取得部512によって、プローブ情報提供サービスからプローブ情報が取得される。
【0035】
続くステップS203では、走行情報取得部200から自車両に係る情報を取得する。より具体的には、走行情報取得部200の車速センサ210から自車両の速度情報を取得し、また、走行情報取得部200のアクセル開度センサ230からアクセル開度に係る情報を取得する。
【0036】
次のステップS204では、車両周辺情報取得部400のミリ波レーダー430によって、前方車両の走行状況(車両周辺状況)に係る情報を取得する。
【0037】
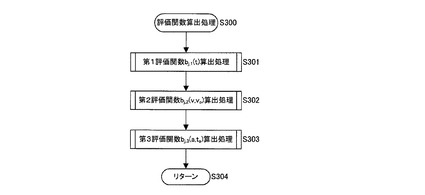
以上のステップS201乃至ステップS204で取得された情報に基づいて、ステップS205では評価関数算出サブルーチンが実行される。このサブルーチンについて図6のフローチャートを参照して説明する。図6は本発明の実施形態に係る運転アシストシステムにおける評価関数算出サブルーチンのフローチャートを示す図である。図6における評価関数算出サブルーチンでは、ステップS301で、第1評価関数bj,1(t)算出処理サブ
ルーチンが実行され、ステップS302で、第2評価関数bj,2(v,vo)算出処理サブルーチンが実行され、ステップS303で、第3評価関数bj,3(a,ta)算出処理サブルーチンが
実行され、ステップS304で、元のルーチンにリターンする。
【0038】
こで、bj,1(t)における添字「j」はj番目の評価ポイントを示しており、添字「1」
は第1の評価関数であることを示しており、tは時間を示している。また、bj,2(v,vo)における添字「j」はj番目の評価ポイントを示しており、添字「2」は第2の評価関数であることを示しており、vは自車両の速度、voは周辺車両(前方車両)の速度を示して
いる。また、bj,3(a,ta) における添字「j」はj番目の評価ポイントを示しており、添字「3」は第3の評価関数であることを示しており、aは自車両の加速度、taはアクセ
ルを踏み込んでからの経過時間を示している。
【0039】
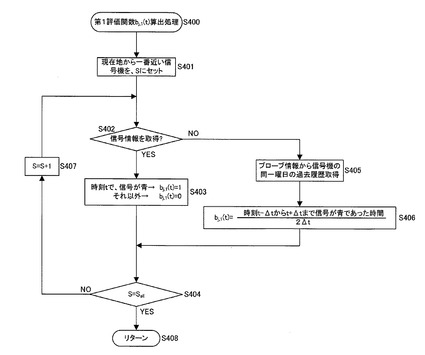
第1評価関数bj,1(t)は時間に応じて変動する評価関数であり、第2評価関数bj,2(v,vo)は周辺交通状況と自車両速度に応じて変動する評価関数であり、第3評価関数bj,3(a,ta)は運転者の運転操作に応じて変動する評価関数である。以下、それぞれの評価関数の算出処理について、図7乃至図9のフローチャートにより説明する。図7は本発明の実施形態に係る運転アシストシステムにおける第1評価関数bj,1(t)算出処理サブルーチンのフ
ローチャートを示す図である。
【0040】
図7において、ステップS400で、第1評価関数bj,1(t)の算出処理サブルーチンが
開始されると、続いてステップS401に進み、現在地から目的地に向かって一番近い信号機をSにセットする。(Sについては図4参照。)
ステップS402では、交通情報提供サービスから信号情報が取得されたか否かが判定される。ステップS402における判定がYESであるときには、信号の変遷情報そのものが取得することができる場合であるので、ステップS403に進み、時刻tで信号が青
があるときはbj,1(t)=1とし、それ以外のときはbj,1(t)=0とすR。
【0041】
一方、ステップS402における判定がNOであるときには、信号の変遷情報そのものは取得することができる場合でない場合であるので、プローブ情報から推定する処理を行うべくステップS405に進む。ステップS405では、プローブ情報から信号機の同一曜日の過去履歴を取得する。そして、ステップS406では、bj,1(t)=(時刻t−Δtからt+Δtまで信号が青であった時間)/2Δtの算出式によって、bj,1(t)を算出する。
【0042】
ステップS404では、S=Sallであるか否かが判定される。Sallは目的地までの間に設置された最後の信号である。ステップS404における判定がNOであるときにはステップS407に進み、Sを1インクリメントしてステップS402に戻る。一方、ステップS404における判定がYESであるときにはステップS408に進み、リターンする。
【0043】
以上のようにして算出される第3評価関数bj,3(a,ta)は、信号機において青信号の確
率が高いほど高い値となる関数である。
【0044】
以上のように、本発明に係る運転アシストシステム100によれば、信号機における信号の変動などの時間的に変化する事象が、第1評価関数bj,1(t)として考慮された上で、
運転アシストを行うので、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように運転アシストを行うなど、効率的な運転アシストを行うことが可能となる。
【0045】
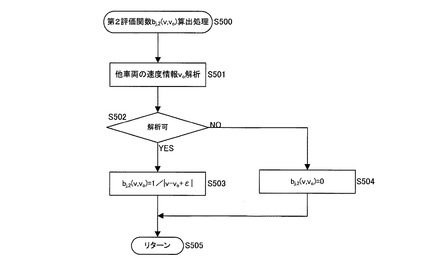
次に、第2評価関数bj,2(v,vo)の算出処理について説明する。図8は本発明の実施形態に係る運転アシストシステムにおける第2評価関数bj,2(v,vo)算出処理サブルーチンのフローチャートを示す図である。
【0046】
図8において、ステップS500で、第2評価関数bj,2(v,vo)算出処理が開始されると、続くステップS501では、ステップS204で取得された車両周辺状況から、他車両(前方)の速度情報voが解析される。なお、このステップS501における解析のため
に、取得したプローブ情報を利用するようにしてもよい。ステップS502では、他車両の速度情報voが解析可能であったか否かが判定される。
【0047】
ステップS502における判定がYESであるときにはステップS503に進み、bj,2(v,vo)をbj,2(v,vo)=1/|v−vo+ε|によって算出する。ここで、εは1を0で除することを避けるために設けられた定数である。
【0048】
一方、ステップS502における判定がNOであるときにはステップS504に進み、bj,2(v,vo)=0とする。ステップS505では、元のルーチンにリターンする。
【0049】
以上のようにして算出される第2評価関数bj,2(v,vo)は、周辺車両の速度と、自車両の速度が近いほど高い値となる関数である。
【0050】
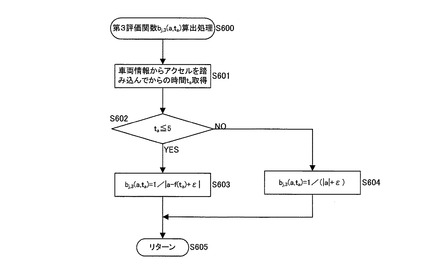
次に、第3評価関数bj,3(a,ta)の算出処理について説明する。図9は本発明の実施形
態に係る運転アシストシステムにおける第3評価関数bj,3(a,ta)算出処理サブルーチン
のフローチャートを示す図である。
【0051】
図9において、ステップS600では、第3評価関数bj,3(a,ta)算出処理が開始され
ると、続いてステップS601に進み、走行情報取得部200における車両情報からアクセルを踏み込んでからの時間taが取得される。ステップS602では、ta≦5がであるか
否か、すなわち、アクセルを踏み込んでからの経過時間が5秒以内であるか否かが判定される。このようにアクセルを踏み込んでから5秒を閾値とするのは、緩やかな加速を行う効果が効いてくるのが5秒以内であるからである。
【0052】
ステップS602における判定がYESであるときには、ステップS603に進み、bj,3(a,ta)をbj,3(a,ta)=1/|a−f(ta)+ε|によって算出する。ここで、f(ta)は理想的な加速曲線の関数を示している。このような理想的な加速曲線は、例えば図10に示すようなものとなる。また、ステップS602における判定がNOであるときには、ステップS604に進み、bj,3(a,ta)をbj,3(a,ta)=1/(|a|+ε)によって算出する。ステップS605で、元のルーチンにリターンする。
【0053】
以上のようにして算出される第3評価関数bj,3(a,ta)は、緩やかな加速ほど高い値と
なる関数である。
【0054】
さて、図5のメインのフローチャートに戻り、ステップS206では、累積評価関数が最大となるように動的計画法により算出を行う。累積評価関数φj(t)は、下式(1)及び(2)から、φj(t)を再帰的に求めるようにする。
φj(t) = [max φi(t- ts) ai,j]・bj(xt) (1)
φi(0)=1 (2)
式(1)及び式(2)において、添字iは移動元の評価ポイントであり、添字jは移動先の評価ポイントを示している。また、tsはサンプリング周期を示しており、ai,jはポ
イント間の遷移を制限するための係数であり、制限速度を超えるような遷移を制限するための係数である。式(2)は初期条件であり、t=0のとき、すなわちスタート時点では、車両10が確実にスタート地点に存在していることを示している。
【0055】
また、各ポイントにおけるbj(xt)での評価関数は以下のように、3つの関数の積とその指数重みλ1、λ2、λ3からなる
bj(xt) =bj,1(t)λ1×bj,2(v, vo)λ2×bj,3(a,ta)λ3 (3)
ステップS207では、目的地における累積評価関数φN(t)が最大となるスケジュ
ールを決定する。
【0056】
決定されたスケジュールを利用することにより、どの時点でアクセルを踏み込むべきか、或いはブレーキをかけるべきか、などに係る情報が判明するので、ステップS208ではこのような情報に基づいて、運転者に対して、アクセルを踏み込むタイミングやブレーキをかけるタイミングにつきアシスト処理を行うようにする。ステップS208におけるアシスト処理の具体的な方法としては、スピーカー711からの音声案内によるアシスト処理や、表示灯712の表示によるアシスト処理や、ブレーキアシスト装置713でブレーキペダルを運転者に代わって踏み込む動作を行うことによるアシスト処理を挙げることができる。
【0057】
ステップS209では、車両10のエンジン、モーター(いずれも不図示)が停止されたか否かが判定される。ステップS210における判定がNOである場合には、ステップS201に戻り、新しいパラメーターを取り込み、(累積)評価関数を再び算出処理を継続する。一方、ステップS210における判定がYESである場合には、ステップS210に進み、運転アシストシステム100の処理を終了する。
【0058】
以上まとめると、本発明に係る運転アシストシステムは、それぞれの評価ポイントにおいて、時間に応じて変動する評価関数を算出する評価関数算出手段と、少なくともこのような評価関数を含む累積評価関数を算出する累積評価関数算出手段と、目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段
と、を有するものであるので、本発明に係る運転アシストシステムによれば、信号機における信号の変動などの時間的に変化する事象が考慮された上で、運転アシストを行うので、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように運転アシストを行うなど、効率的な運転アシストを行うことが可能となる。
【符号の説明】
【0059】
10・・・車両、100・・・ECU、120・・・計時部、200・・・走行情報取得部、210・・・車速センサ、230・・・アクセル開度センサ、400・・・車両周辺情報取得部、430・・・ミリ波レーダー、500・・・通信部、510・・・通信ユニット、511・・・信号情報取得部、512・・・プローブ情報取得部、700・・・運転アシスト装置、710・・・主制御部、711・・・スピーカー、712・・・表示灯、713・・・ブレーキアシスト装置、800・・・ナビゲーションシステム部、810・・・ナビゲーションシステム、811・・・GPS位置情報取得部、820・・・データベース
【技術分野】
【0001】
本発明は、車両に搭載され車両の運転をアシストする運転アシスト装置に関する。
【背景技術】
【0002】
従来より、目的地がセットされると、距離や時間に関して最適でかつ安全なルートを提供するのみならず、車両の燃料消費量に関して最適ルート案内を行う運転アシストシステムが知られている。
【0003】
上記のような運転アシストシステムの一例として、特許文献1(特開2009−133779号公報)には、記憶部と制御部とを少なくとも備えた、車両の運転支援装置であって、上記記憶部は、地図情報を記憶し、上記制御部は、上記車両の現在地を取得する現在地取得手段と、上記地図情報から目的地を設定する目的地設定手段と、上記現在地取得手段により取得された上記現在地から上記目的地までの目標到着時刻を設定し上記記憶部に格納する目標到着時刻設定手段と、上記車両の上記現在地から上記目的地までの目標燃費を設定し上記記憶部に格納する目標燃費設定手段と、上記記憶部に格納された上記目標到着時刻と上記目標燃費と上記地図情報とに基づいて、上記車両の上記現在地から上記目的地までの経路の走行計画を生成し上記記憶部に格納する走行計画生成手段と、を備えたことを特徴とする運転アシストシステムが開示されている。
【特許文献1】特開2009−133779号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的までのルート中において、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように、運転のスケジューリングを行うことが理想であるが、従来のような運転アシストシステムでは、信号機における信号の変動などの、時間的に変化する事象が考慮された上で、運転アシストがなされているわけではないので、必ずしも効率的な運転アシストを行うことができない、という問題があった。
【課題を解決するための手段】
【0005】
上記問題点を解決するために、請求項1に係る発明は、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する評価関数を算出する評価関数算出手段と、少なくとも前記評価関数を含む累積評価関数を算出する累積評価関数算出手段と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする。
【0006】
また、請求項2に係る発明は、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段と、それぞれの評価ポイントにおいて、周辺交通状況と自車両速度に応じて変動する第2評価関数を算出する第2評価関数算出手段と、それぞれの評価ポイントにおいて、運転者の運転操作に応じて変動する第3評価関数を算出する第3評価関数算出手段と、前記第1評価関数と前記第2評価関数と前記第3評価関数の累積評価関数を算出する累積評価関数算出手段と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする。
【0007】
また、請求項3に係る発明は、請求項1又は請求項2に記載の運転アシストシステムにおいて、前記第1評価関数が、現在地と目的地との間に設置される信号機における信号の時間変動に応じ変動することを特徴とする。
【0008】
また、請求項4に係る発明は、請求項1乃至請求項3のいずれかに記載の運転アシストシステムにおいて、運転アシスト動作が音声によるアシストであることを特徴とする。
【0009】
また、請求項5に係る発明は、請求項1乃至請求項4のいずれかに記載の運転アシストシステムにおいて、運転アシスト動作が表示によるアシストであることを特徴とする。
【0010】
また、請求項6に係る発明は、請求項1乃至請求項5のいずれかに記載の運転アシストシステムにおいて、運転アシスト動作がブレーキ制御によるアシストであることを特徴とする。
【発明の効果】
【0011】
本発明に係る運転アシストシステムは、それぞれの評価ポイントにおいて、時間に応じて変動する評価関数を算出する評価関数算出手段と、少なくともこのような評価関数を含む累積評価関数を算出する累積評価関数算出手段と、目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有するものであるので、本発明に係る運転アシストシステムによれば、信号機における信号の変動などの時間的に変化する事象が考慮された上で、運転アシストを行うので、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように運転アシストを行うなど、効率的な運転アシストを行うことが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る運転アシストシステムの概略を示す図である。
【図2】本発明の実施形態に係る運転アシストシステムのブロック構成の概略を示す図である。
【図3】本発明の実施形態に係る運転アシストシステムによる評価ポイント決定処理のフローチャートを示す図である。
【図4】決定ルートと評価ポイントとの関係を模式的に示す図である。
【図5】本発明の実施形態に係る運転アシストシステムによる運転アシスト処理・動作のフローチャートを示す図である。
【図6】本発明の実施形態に係る運転アシストシステムにおける評価関数算出サブルーチンのフローチャートを示す図である。
【図7】本発明の実施形態に係る運転アシストシステムにおける第1評価関数bj,1(t)算出処理サブルーチンのフローチャートを示す図である。
【図8】本発明の実施形態に係る運転アシストシステムにおける第2評価関数bj,2(v,vo)算出処理サブルーチンのフローチャートを示す図である。
【図9】本発明の実施形態に係る運転アシストシステムにおける第3評価関数bj,3(a,ta)算出処理サブルーチンのフローチャートを示す図である。
【図10】理想加速曲線の関数f(ta)を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面を参照しつつ説明する。図1は本発明の実施形態に係る運転アシストシステムの概略を示す図であり、図2は本発明の実施形態に係る運転アシストシステムのブロック構成の概略を示す図である。図1及び図2において、10は車両、100はECU、120は計時部、200は走行情報取得部、210は車速センサ、230はアクセル開度センサ、400は車両周辺情報取得部、430はミリ波レーダー、5
00は通信部、510は通信ユニット、511は信号情報取得部、512はプローブ情報取得部、700は運転アシスト装置、710は主制御部、711はスピーカー、712は表示灯、713はブレーキアシスト装置、800はナビゲーションシステム部、810はナビゲーションシステム、811はGPS位置情報取得部、820はデータベースをそれぞれ示している。本実施形態の運転アシストシステム100は、原動機としてエンジンを搭載し、このエンジンの駆動力により走行を行う自動車、或いは、原動機としてモーターを搭載し、モーターの駆動力のみによる走行を行う電気自動車、或いは原動機として上記双方を搭載し、モーター及び/又はエンジンによる駆動に基づいて走行するハイブリッド車などの車両10に搭載することが可能である。
【0014】
図1及び図2に示す、本実施形態に係る運転アシストシステム100は、車両10に搭載された通信部500によって、交通情報提供サービス、プローブ情報提供サービスと無線通信することが想定されている。交通情報提供サービスは、車両10の通信部500を介して、車両10のシステムに信号機の信号変遷情報を提供することが可能なものであり、また、プローブ情報提供サービスは、車両10の通信部500を介して、車両10のシステムにプローブカーに基づく交通状態情報を提供することが可能なものである。
【0015】
上記のような交通情報提供サービスから情報提供を受けた運転アシストシステム100は、設置信号機の信号変遷情報をリアルタイムで受信することできる。また、プローブ情報提供サービスから情報提供を受けた運転アシストシステム100は、同一曜日の過去の履歴における交通の流れを解析することで、信号機の信号変遷情報の予想を行うことができるようになっている。
【0016】
運転アシストシステム100は、交通情報提供サービスから信号変遷情報を直接的に受信することが可能な場合には、交通情報提供サービスからの受信情報を利用するようにされているが、交通情報提供サービスから信号変遷情報を取得することができないような場合には、プローブ情報提供サービスからの情報提供に基づいて信号機の信号変遷情報を予測するようになっている。
【0017】
本実施形態に係る車載システムにおいて、ECU100はエレクトロニックコントロールユニットの略であり、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。ECU100は、図示されているECU100と接続される各構成と協働・動作する。また、ECU100は、本発明の運転アシストシステムにおける種々の制御処理は、ECU100内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。なお、特許請求の範囲に記載された「算出手段」、などは、このECU100の動作を上位概念的に表現したものである。なお、本実施形態においては、上記の各手段はECU100とECU100上で実行されるプログラムによって実現されるものとしているが、これらの各手段はこれに限定されるものではなく、論理回路などのハードウエアのみで実現されるようなものであってもよい。
【0018】
ECU100さらには、計時部120を備えており、この計時部120によって、時刻計測を行うことができるようになっている。この計時部120で計測される時刻情報と、プローブ情報提供サービスから受信した交通履歴情報とから、所定の時刻における信号変遷情報を予想することができるようになっている。
【0019】
走行情報取得部200は、車両10の実走行に関連する情報、或いは運転操作情報などを取得する構成であり、例えば、車速センサ210、アクセル開度センサ230などを少なくとも含むものである。
【0020】
走行情報取得部200における車速センサ210は、車両10の速度(自車両速度)のセンシング(計測)を行うようになっている。なお、車両の走行状況を取得するものとして、その他のセンサ類を設けるようにしてもよい。また、走行情報取得部200において、アクセル開度センサ230は運転者によるアクセルペダルの踏み込み量(アクセル開度)を検出するものである。
【0021】
車両周辺情報取得部400は、車両10周辺の車外の情報などを取得する構成であり、本実施形態では、車両10前方側を走行する車両などとの距離を計測することが可能なミリ波レーダー430を有している。なお、本実施形態においては、ミリ波レーダー430は車両10前方のみを撮影するように設けられているが、ミリ波レーダー430をより多く搭載して、前方に加え車両10後方を撮影するように構成することも可能である。このようなミリ波レーダー430から取得された前方車両との間の距離情報によって、例えば、車両周辺に存在する他車両の速度情報を解析することが可能となる。
【0022】
なお、本実施形態においては、車両周辺情報取得部400としてミリ波レーダー430を用いるようにしたが、車両10前方側、及び車両10後方側を撮像することが可能なステレオカメラユニット420を設けるなどしても良い。このようなステレオカメラユニット420は、ステレオの動画像を撮影が可能なものであり、さらにステレオカメラユニット420で取得された撮影データに基づいて、ECU100が画像解析を行うことにより、撮影された物体とステレオカメラユニット420との間の距離とが算出できるようになっている。これに基づいて、システムは車両周辺に存在する他車両の速度情報を解析することが可能となる。
【0023】
通信部500における通信ユニット510は、交通情報提供サービス、プローブ情報提供サービスとの無線通信を可能とするユニットである。この通信ユニット510における信号情報取得部511によって、交通情報提供サービスから設置信号機の信号変遷情報を取得することが可能となり、ECU100はこれにより信号の変遷をリアルタイムで把握することが可能となる。また、通信ユニット510におけるプローブ情報取得部512によって、プローブ情報提供サービスから、過去の履歴における交通の流れを受信することができ、これによりECU100は信号機の信号変遷の予想を行うことができるようになっている。
【0024】
運転アシスト装置700は、車両10の運転車に対し、運転支援を行う装置構成であり、音を発生し音声案内を行うことで、運転者に最適な運転操作のアシストを行うスピーカー711、点灯することによって運転者に最適な運転操作のアシストを行う表示灯712、ブレーキペダルを運転者に代わって踏み込む動作を行うことで、運転者の運転操作のアシストを行うブレーキアシスト装置713、そして、これらスピーカー711、表示灯712、ブレーキアシスト装置713を制御する主制御部710を有している。
【0025】
ナビゲーションシステム部800は、ナビゲーションシステム810やこのナビゲーションシステム810が参照する地図情報などのナビゲーションシステム用データベース820とからなっている。ナビゲーションシステム810は、GPS衛星からのGPS信号を受信して自らの位置座標データを計算するGPS位置情報取得部811を用いることによって、車両の現在位置情報を取得することができる。なお、ナビゲーションシステム810は、ユーザーが目的地を入力することが可能なインターフェイス(不図示)を備えており、このユーザーからの入力に基づき、ナビゲーションシステム用データベース820を参照し、現在地から目的地までのルートを検索可能なルート検索機能が備えられている。このようなルート検索機能としては従来周知のものを用いることができる。
【0026】
また、本発明の運転アシストシステムにおいては、ナビゲーションシステム用データベ
ース820には、道路情報、施設情報、信号機設置情報などが記憶されているが、道路情報には道路種別情報(一般道、高速道など)を設けておくことが好ましい。また、ナビゲーションシステム用データベース820の地図データには、スピードを出せるような郊外であるのか、或いはスピードが制限される都心であるかの別を示す領域分けデータが予め含まれていることが好ましい。上記のような道路種別情報や領域分けに応じて、後述する係数ai,jを定めるようにするとよい。
【0027】
次に、以上のように構成される運転アシストシステム100の処理について、フローチャート等を参照しながら説明する。本実施形態に係る運転アシストシステム100においては、ユーザー(運転者)によって入力された目的地に効率的に到着するように、運転アシストを行うような処理が実行されるようになっている。そこで、ユーザーによって目的地が設定されると、まずルートを決定し、そのルートにわたって評価ポイント(到着地の評価ポイントも含む)を設定する処理が行われる。そして、本実施形態に係る運転アシストシステム100においては、それぞれの評価ポイントにおいて(累積)評価関数が規定され、目的地の(累積)評価関数が最大となるような運転操作を行うように運転者に対してアシストを行う。以下、詳しく説明する。
【0028】
図3は本発明の実施形態に係る運転アシストシステムによる評価ポイント決定処理のフローチャートを示す図であり、図4は決定ルートと評価ポイントとの関係を模式的に示す図である。
【0029】
図3において、ステップS100において、評価ポイント決定処理が開始されると、続くステップS101では、ナビゲーションシステム部800におけるGPS位置情報取得部811で車両10の現在地が取得される。次のステップS102では、ユーザーによってナビゲーションシステム部800に入力された目的地が取得される。
【0030】
ステップS103では、ナビゲーションシステム部800でデータベース820が参照されて、ルート検索が行われ、この検索結果がユーザーに対して提示される。ステップS104では、提示されたルートに対して、ユーザーが了承したか否かが判定される。判定結果がYESであるときにはステップS105に進み、NOであるときにはステップS103に戻り、再度異なるルートを検索する。
【0031】
ステップS104における判定がYESであるときに進むステップS105では、ユーザーの了承を得たルートで決定がなされる。図4の上段は、決定されたルートを模式的に示す図である。ステップS106では、データベース820が参照されて、このような決定ルート中における信号機設置情報の抽出が行われる。本実施形態においては、図4に示すように、ルート中にS=1、S=2、・・・S=Sallの信号機が存在している場合を
例にとり説明する。ステップS107では、評価ポイントの決定が行われる。評価ポイントの決定方法としては、種々の方法があり得るが、例えば、本実施形態では現在地を第1の評価ポイント、目的地を第Nの評価ポイントとして、それらの間のルート中を(N+1)等分に分割することによって、1乃至Nの評価ポイントを得るようにしている。
【0032】
ここで、第1の評価ポイント(現在地)に対応して累積評価関数φ1(t)が、第2の
評価ポイントには累積評価関数φ2(t)が、・・・・第Nの評価ポイント(目的地)に
は累積評価関数φN(t)が、というように、それぞれのポイントにおいて累積評価関数
が規定される。本実施形態に係る運転アシストシステム100においては、このような累積評価関数が既定され、このような累積評価関数のうち、第Nの評価ポイント(目的地)における累積評価関数が最大となるように運転アシストを行うようにするものである。ステップS108では、評価ポイントの決定処理を終了する。
【0033】
以上のように決定された評価ポイントに基づいて、車両10における運転アシストシステム100では運転アシストの動作・処理が実行される。以下、運転アシスト処理についてフローチャートなどを参照して説明する。図5は本発明の実施形態に係る運転アシストシステムによる運転アシスト処理・動作のフローチャートを示す図である。
【0034】
図5において、ステップS200で、運転アシストシステム100の処理が開始されると、続いてステップS201に進み、通信部500の信号情報取得部511によって、交通情報提供サービスから信号情報が取得される。ここでいう信号情報とは、現在地から目的地までに設置された信号機の信号変遷情報である。また、ステップS202では、通信部500のプローブ情報取得部512によって、プローブ情報提供サービスからプローブ情報が取得される。
【0035】
続くステップS203では、走行情報取得部200から自車両に係る情報を取得する。より具体的には、走行情報取得部200の車速センサ210から自車両の速度情報を取得し、また、走行情報取得部200のアクセル開度センサ230からアクセル開度に係る情報を取得する。
【0036】
次のステップS204では、車両周辺情報取得部400のミリ波レーダー430によって、前方車両の走行状況(車両周辺状況)に係る情報を取得する。
【0037】
以上のステップS201乃至ステップS204で取得された情報に基づいて、ステップS205では評価関数算出サブルーチンが実行される。このサブルーチンについて図6のフローチャートを参照して説明する。図6は本発明の実施形態に係る運転アシストシステムにおける評価関数算出サブルーチンのフローチャートを示す図である。図6における評価関数算出サブルーチンでは、ステップS301で、第1評価関数bj,1(t)算出処理サブ
ルーチンが実行され、ステップS302で、第2評価関数bj,2(v,vo)算出処理サブルーチンが実行され、ステップS303で、第3評価関数bj,3(a,ta)算出処理サブルーチンが
実行され、ステップS304で、元のルーチンにリターンする。
【0038】
こで、bj,1(t)における添字「j」はj番目の評価ポイントを示しており、添字「1」
は第1の評価関数であることを示しており、tは時間を示している。また、bj,2(v,vo)における添字「j」はj番目の評価ポイントを示しており、添字「2」は第2の評価関数であることを示しており、vは自車両の速度、voは周辺車両(前方車両)の速度を示して
いる。また、bj,3(a,ta) における添字「j」はj番目の評価ポイントを示しており、添字「3」は第3の評価関数であることを示しており、aは自車両の加速度、taはアクセ
ルを踏み込んでからの経過時間を示している。
【0039】
第1評価関数bj,1(t)は時間に応じて変動する評価関数であり、第2評価関数bj,2(v,vo)は周辺交通状況と自車両速度に応じて変動する評価関数であり、第3評価関数bj,3(a,ta)は運転者の運転操作に応じて変動する評価関数である。以下、それぞれの評価関数の算出処理について、図7乃至図9のフローチャートにより説明する。図7は本発明の実施形態に係る運転アシストシステムにおける第1評価関数bj,1(t)算出処理サブルーチンのフ
ローチャートを示す図である。
【0040】
図7において、ステップS400で、第1評価関数bj,1(t)の算出処理サブルーチンが
開始されると、続いてステップS401に進み、現在地から目的地に向かって一番近い信号機をSにセットする。(Sについては図4参照。)
ステップS402では、交通情報提供サービスから信号情報が取得されたか否かが判定される。ステップS402における判定がYESであるときには、信号の変遷情報そのものが取得することができる場合であるので、ステップS403に進み、時刻tで信号が青
があるときはbj,1(t)=1とし、それ以外のときはbj,1(t)=0とすR。
【0041】
一方、ステップS402における判定がNOであるときには、信号の変遷情報そのものは取得することができる場合でない場合であるので、プローブ情報から推定する処理を行うべくステップS405に進む。ステップS405では、プローブ情報から信号機の同一曜日の過去履歴を取得する。そして、ステップS406では、bj,1(t)=(時刻t−Δtからt+Δtまで信号が青であった時間)/2Δtの算出式によって、bj,1(t)を算出する。
【0042】
ステップS404では、S=Sallであるか否かが判定される。Sallは目的地までの間に設置された最後の信号である。ステップS404における判定がNOであるときにはステップS407に進み、Sを1インクリメントしてステップS402に戻る。一方、ステップS404における判定がYESであるときにはステップS408に進み、リターンする。
【0043】
以上のようにして算出される第3評価関数bj,3(a,ta)は、信号機において青信号の確
率が高いほど高い値となる関数である。
【0044】
以上のように、本発明に係る運転アシストシステム100によれば、信号機における信号の変動などの時間的に変化する事象が、第1評価関数bj,1(t)として考慮された上で、
運転アシストを行うので、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように運転アシストを行うなど、効率的な運転アシストを行うことが可能となる。
【0045】
次に、第2評価関数bj,2(v,vo)の算出処理について説明する。図8は本発明の実施形態に係る運転アシストシステムにおける第2評価関数bj,2(v,vo)算出処理サブルーチンのフローチャートを示す図である。
【0046】
図8において、ステップS500で、第2評価関数bj,2(v,vo)算出処理が開始されると、続くステップS501では、ステップS204で取得された車両周辺状況から、他車両(前方)の速度情報voが解析される。なお、このステップS501における解析のため
に、取得したプローブ情報を利用するようにしてもよい。ステップS502では、他車両の速度情報voが解析可能であったか否かが判定される。
【0047】
ステップS502における判定がYESであるときにはステップS503に進み、bj,2(v,vo)をbj,2(v,vo)=1/|v−vo+ε|によって算出する。ここで、εは1を0で除することを避けるために設けられた定数である。
【0048】
一方、ステップS502における判定がNOであるときにはステップS504に進み、bj,2(v,vo)=0とする。ステップS505では、元のルーチンにリターンする。
【0049】
以上のようにして算出される第2評価関数bj,2(v,vo)は、周辺車両の速度と、自車両の速度が近いほど高い値となる関数である。
【0050】
次に、第3評価関数bj,3(a,ta)の算出処理について説明する。図9は本発明の実施形
態に係る運転アシストシステムにおける第3評価関数bj,3(a,ta)算出処理サブルーチン
のフローチャートを示す図である。
【0051】
図9において、ステップS600では、第3評価関数bj,3(a,ta)算出処理が開始され
ると、続いてステップS601に進み、走行情報取得部200における車両情報からアクセルを踏み込んでからの時間taが取得される。ステップS602では、ta≦5がであるか
否か、すなわち、アクセルを踏み込んでからの経過時間が5秒以内であるか否かが判定される。このようにアクセルを踏み込んでから5秒を閾値とするのは、緩やかな加速を行う効果が効いてくるのが5秒以内であるからである。
【0052】
ステップS602における判定がYESであるときには、ステップS603に進み、bj,3(a,ta)をbj,3(a,ta)=1/|a−f(ta)+ε|によって算出する。ここで、f(ta)は理想的な加速曲線の関数を示している。このような理想的な加速曲線は、例えば図10に示すようなものとなる。また、ステップS602における判定がNOであるときには、ステップS604に進み、bj,3(a,ta)をbj,3(a,ta)=1/(|a|+ε)によって算出する。ステップS605で、元のルーチンにリターンする。
【0053】
以上のようにして算出される第3評価関数bj,3(a,ta)は、緩やかな加速ほど高い値と
なる関数である。
【0054】
さて、図5のメインのフローチャートに戻り、ステップS206では、累積評価関数が最大となるように動的計画法により算出を行う。累積評価関数φj(t)は、下式(1)及び(2)から、φj(t)を再帰的に求めるようにする。
φj(t) = [max φi(t- ts) ai,j]・bj(xt) (1)
φi(0)=1 (2)
式(1)及び式(2)において、添字iは移動元の評価ポイントであり、添字jは移動先の評価ポイントを示している。また、tsはサンプリング周期を示しており、ai,jはポ
イント間の遷移を制限するための係数であり、制限速度を超えるような遷移を制限するための係数である。式(2)は初期条件であり、t=0のとき、すなわちスタート時点では、車両10が確実にスタート地点に存在していることを示している。
【0055】
また、各ポイントにおけるbj(xt)での評価関数は以下のように、3つの関数の積とその指数重みλ1、λ2、λ3からなる
bj(xt) =bj,1(t)λ1×bj,2(v, vo)λ2×bj,3(a,ta)λ3 (3)
ステップS207では、目的地における累積評価関数φN(t)が最大となるスケジュ
ールを決定する。
【0056】
決定されたスケジュールを利用することにより、どの時点でアクセルを踏み込むべきか、或いはブレーキをかけるべきか、などに係る情報が判明するので、ステップS208ではこのような情報に基づいて、運転者に対して、アクセルを踏み込むタイミングやブレーキをかけるタイミングにつきアシスト処理を行うようにする。ステップS208におけるアシスト処理の具体的な方法としては、スピーカー711からの音声案内によるアシスト処理や、表示灯712の表示によるアシスト処理や、ブレーキアシスト装置713でブレーキペダルを運転者に代わって踏み込む動作を行うことによるアシスト処理を挙げることができる。
【0057】
ステップS209では、車両10のエンジン、モーター(いずれも不図示)が停止されたか否かが判定される。ステップS210における判定がNOである場合には、ステップS201に戻り、新しいパラメーターを取り込み、(累積)評価関数を再び算出処理を継続する。一方、ステップS210における判定がYESである場合には、ステップS210に進み、運転アシストシステム100の処理を終了する。
【0058】
以上まとめると、本発明に係る運転アシストシステムは、それぞれの評価ポイントにおいて、時間に応じて変動する評価関数を算出する評価関数算出手段と、少なくともこのような評価関数を含む累積評価関数を算出する累積評価関数算出手段と、目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段
と、を有するものであるので、本発明に係る運転アシストシステムによれば、信号機における信号の変動などの時間的に変化する事象が考慮された上で、運転アシストを行うので、信号機が設置された交差点を通過する際には、可能な限り赤信号によって止まらないように運転アシストを行うなど、効率的な運転アシストを行うことが可能となる。
【符号の説明】
【0059】
10・・・車両、100・・・ECU、120・・・計時部、200・・・走行情報取得部、210・・・車速センサ、230・・・アクセル開度センサ、400・・・車両周辺情報取得部、430・・・ミリ波レーダー、500・・・通信部、510・・・通信ユニット、511・・・信号情報取得部、512・・・プローブ情報取得部、700・・・運転アシスト装置、710・・・主制御部、711・・・スピーカー、712・・・表示灯、713・・・ブレーキアシスト装置、800・・・ナビゲーションシステム部、810・・・ナビゲーションシステム、811・・・GPS位置情報取得部、820・・・データベース
【特許請求の範囲】
【請求項1】
車両に搭載され車両の運転をアシストする運転アシストシステムであって、
現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、
それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段と、
少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段と、
前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする運転アシストシステム。
【請求項2】
車両に搭載され車両の運転をアシストする運転アシストシステムであって、
現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、
それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段と、
それぞれの評価ポイントにおいて、周辺交通状況と自車両速度に応じて変動する第2評価関数を算出する第2評価関数算出手段と、
それぞれの評価ポイントにおいて、運転者の運転操作に応じて変動する第3評価関数を算出する第3評価関数算出手段と、
前記第1評価関数と前記第2評価関数と前記第3評価関数の累積評価関数を算出する累積評価関数算出手段と、
前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする運転アシストシステム。
【請求項3】
前記第1評価関数が、現在地と目的地との間に設置される信号機における信号の時間変動に応じ変動することを特徴とする請求項1又は請求項2に記載の運転アシストシステム。
【請求項4】
運転アシスト動作が音声によるアシストであることを特徴とする請求項1乃至請求項3のいずれかに記載の運転アシストシステム。
【請求項5】
運転アシスト動作が表示によるアシストであることを特徴とする請求項1乃至請求項4のいずれかに記載の運転アシストシステム。
【請求項6】
運転アシスト動作がブレーキ制御によるアシストであることを特徴とする請求項1乃至請求項5のいずれかに記載の運転アシストシステム。
【請求項1】
車両に搭載され車両の運転をアシストする運転アシストシステムであって、
現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、
それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段と、
少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段と、
前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする運転アシストシステム。
【請求項2】
車両に搭載され車両の運転をアシストする運転アシストシステムであって、
現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、
それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段と、
それぞれの評価ポイントにおいて、周辺交通状況と自車両速度に応じて変動する第2評価関数を算出する第2評価関数算出手段と、
それぞれの評価ポイントにおいて、運転者の運転操作に応じて変動する第3評価関数を算出する第3評価関数算出手段と、
前記第1評価関数と前記第2評価関数と前記第3評価関数の累積評価関数を算出する累積評価関数算出手段と、
前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作を行う運転アシスト手段と、を有することを特徴とする運転アシストシステム。
【請求項3】
前記第1評価関数が、現在地と目的地との間に設置される信号機における信号の時間変動に応じ変動することを特徴とする請求項1又は請求項2に記載の運転アシストシステム。
【請求項4】
運転アシスト動作が音声によるアシストであることを特徴とする請求項1乃至請求項3のいずれかに記載の運転アシストシステム。
【請求項5】
運転アシスト動作が表示によるアシストであることを特徴とする請求項1乃至請求項4のいずれかに記載の運転アシストシステム。
【請求項6】
運転アシスト動作がブレーキ制御によるアシストであることを特徴とする請求項1乃至請求項5のいずれかに記載の運転アシストシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−153957(P2011−153957A)
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願番号】特願2010−16368(P2010−16368)
【出願日】平成22年1月28日(2010.1.28)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願日】平成22年1月28日(2010.1.28)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]