
運転シーン判定装置、運転シーン判定方法およびプログラム、ならびに、ワークロード推定装置、ワークロード推定方法およびプログラム
【課題】 運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることのできる運転シーン判定装置を提供する。
【解決手段】 運転シーン判定装置1は、車両情報と道路情報に運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーンDB11と、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶する遷移可否DB12と、運転シーン対応情報および遷移可否情報に基づいて現在の車両情報および現在の道路情報から現在の運転シーンを判定する運転シーン判定部10を備えている。この運転シーン判定部10は、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定する。
【解決手段】 運転シーン判定装置1は、車両情報と道路情報に運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーンDB11と、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶する遷移可否DB12と、運転シーン対応情報および遷移可否情報に基づいて現在の車両情報および現在の道路情報から現在の運転シーンを判定する運転シーン判定部10を備えている。この運転シーン判定部10は、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転シーンを判定する機能を備えた運転シーン判定装置に関し、特に、運転シーンの判定精度を向上する技術に関する。
【背景技術】
【0002】
従来、「信号待ち」や「急停車」などの運転シーンを判定する機能を備えたシステムが提案されている(例えば特許文献1参照)。従来のシステムでは、車両状態検出装置(車速センサや操舵角センサや加速度センサなど)から得られる情報に基づいて運転シーンの決定が行われる。この車両状態検出装置には、ナビゲーション装置も含まれており、自車両の位置情報やルート情報等も、運転シーンの決定に利用することができる。
【0003】
この従来のシステムでは、運転シーンの決定を行うために、車両状態検出装置からの出力を継続的に監視し、それらの出力値と既登録の運転シーンに対応する条件(車速、車両位置などから構成される)とを照合する。そして、照合の結果、条件と完全に合致する運転シーンが存在する場合に、その運転シーンが現在の運転シーンとして決定される。なお、照合の結果、条件が完全に満たされる運転シーンが存在しない場合には、所定の適合率(条件が満たされる度合い。例えば、車速の条件は満たすが、車両位置の条件は満たさない等。)を上回る運転シーンが、現在の運転シーンとして決定される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−290584号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のシステムにおいては、条件と完全に合致する運転シーンが存在する場合には、必ず、その運転シーンが現在の運転シーンとして決定されることになるが、照合に用いる条件(運転シーンに対応する条件)が必ずしも完全なものであるとは限らない。つまり、通常、運転シーンに対応する条件として用意できるものは、その条件に概ね合致すれば大体その運転シーンであろうという程度のものであり、したがって、照合の結果、その条件と完全に合致したからといって、現在の運転シーンとして決定したものが必ずしも正しいとは限らない。このように、従来のシステムでは、条件と完全に合致する運転シーンが存在する場合に発生する「運転シーンの誤判定」について何らの考慮もなされていなかった。したがって、条件と完全に合致したというだけで、実際とは異なる運転シーンが現在の運転シーンとして決定されてしまう(運転シーンの誤判定が発生する)という問題があった。
【0006】
本発明は、上記の課題に鑑みてなされたもので、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を向上することのできる運転シーン判定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の運転シーン判定装置は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、現在の車両情報および現在の道路情報を取得する情報取得手段と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する運転シーン判定手段と、を備え、前記運転シーン判定手段は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する。
【0008】
これにより、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができる。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定される。言い換えれば、現在の車両情報および現在の道路情報に対応付けられた運転シーンであっても、前の運転シーンから遷移可能でない場合には、現在の運転シーンでないと判定される。したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0009】
また、本発明の運転シーン判定装置では、前記運転シーン記憶部は、前記現在の運転シーンごとに用意された複数の前記運転シーン対応情報を記憶し、前記運転シーン判定手段は、前記複数の運転シーン対応情報の中から前記現在の運転シーンに応じた運転シーン対応情報を選択して、前記現在の運転シーンの判定に用いてもよい。
【0010】
これにより、運転シーンごとに用意された複数の運転シーン対応情報の中から選択した運転シーン対応情報(現在の運転シーンに応じた運転シーン対応情報)を用いることによって、現在の運転シーンの判定を適切に行うことができる。
【0011】
また、本発明の運転シーン判定装置では、前記運転シーンには、車線変更または右左折が含まれており、前記車線変更または右左折に対応付けられる前記車両情報には、舵角が含まれており、前記舵角の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さくてもよい。
【0012】
これにより、「車線変更」または「右左折」の運転シーンに対応付けられる「舵角」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」または「右左折」の運転シーンの判定を、その車両の車速に応じて適切に行うことができる。
【0013】
また、本発明の運転シーン判定装置は、前記現在の車両情報に基づいて、前記現在の運転シーンが終了したか否かを判定するシーン終了判定手段を備え、前記運転シーン判定手段は、前記現在の運転シーンが終了したと判定されるまで、前の運転シーンが継続しているとして前記現在の運転シーンの判定を行ってもよい。
【0014】
これにより、現在の車両情報に基づいて、現在の運転シーンが終了したか否かが判定され、その運転シーンが終了したと判定されるまでは、前の運転シーンが継続しているとして現在の運転シーンの判定が行われる。したがって、前の運転シーンが終了しないうちは(前の運転シーンが継続しているときには)、車両情報や道路情報が別の運転シーンに対応するものであったとしても、その運転シーンが継続していると判定される。このようにして、運転シーンの継続中に他の運転シーンへ遷移するという誤判定を抑えることができる。
【0015】
また、本発明の運転シーン判定装置では、前記シーン終了判定手段は、前記車両情報に含まれる舵角および舵角変化率に基づいて、車線変更の運転シーンが終了したか否かを判定し、前記舵角および前記舵角変化率の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さくてもよい。
【0016】
これにより、「舵角」および「舵角変化率」に基づいて、「車線変更」の運転シーンが終了したか否かを適切に判定することができる。例えば、「舵角」が「正(左)→負(右)→正(左)→ゼロ(直進)」と変化し、かつ、「舵角変化率」の絶対値が「正(毎秒0°より大)→ゼロ(毎秒0°)」と変化した場合に、「左車線変更」の運転シーンが終了したと判定される。この場合、「舵角」および「舵角変化率」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」の運転シーンの終了判定を、その車両の車速に応じて適切に行うことができる。
【0017】
また、本発明の運転シーン判定装置では、前記運転シーン判定手段は、第1の運転シーンから第2の運転シーンへシーン遷移した後に前記第2の運転シーンから前記第1の運転シーンへ戻る場合に、前記第1の運転シーンと対応付けられている前記車両情報または前記道路情報を変更して、前記第1の運転シーンへ戻るのを困難にするヒステリシス制御を行う。
【0018】
これにより、第1の運転シーンから第2の運転シーンへシーン遷移した後に、第2の運転シーンから第1の運転シーンへ戻る場合には、第1の運転シーンと対応付けられている車両情報または道路情報を変更するヒステリシス制御が行われ、第1の運転シーンへ戻りにくくなる。このようなヒステリシス制御によって、運転シーンの遷移が頻繁に発生するのを抑えることができる。
【0019】
本発明の運転シーン判定方法は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、現在の車両情報および現在の道路情報を取得し、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する方法において、前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する。
【0020】
この方法によっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0021】
本発明の運転シーン判定プログラムは、メモリに記憶されている、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、を用いて、コンピュータに、現在の車両情報および現在の道路情報を取得する処理と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する処理と、を実行させるプログラムにおいて、前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する。
【0022】
このプログラムによっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0023】
本発明のワークロード推定装置は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、現在の車両情報および現在の道路情報を取得する情報取得手段と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されているモデル記憶手段と、車両運転中のユーザから前記寄与行動に関するデータを取得するデータ取得手段と、前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定するワークロード推定手段と、を備え、前記ワークロード推定手段は、前記車両運転中のユーザの寄与行動として、前記運転シーン判定手段によって判定された前記現在の運転シーンを用いる。
【0024】
これにより、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0025】
本発明のワークロード推定方法は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されており、現在の車両情報および現在の道路情報を取得し、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、車両運転中のユーザから前記寄与行動に関するデータを取得し、前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する方法において、前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定によって得られた前記現在の運転シーンを用いる。
【0026】
この方法によっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0027】
本発明のワークロード推定プログラムは、メモリに記憶されている、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルと、を用いて、コンピュータに、現在の車両情報および現在の道路情報を取得する処理と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、車両運転中のユーザから前記寄与行動に関するデータを取得する処理と、前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する処理と、を実行させるプログラムにおいて、前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定する処理によって得られた前記現在の運転シーンを用いる。
【0028】
このプログラムによっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0029】
本発明のサービス提供装置は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、現在の車両情報および現在の道路情報を取得する情報取得手段と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、判定された前記現在の運転シーンに応じたサービスを提供するサービス提供手段と、を備えている。
【0030】
これにより、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【0031】
本発明のサービス提供方法は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、現在の車両情報および現在の道路情報を取得し、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、判定された前記現在の運転シーンに応じたサービスを提供する。
【0032】
この方法によっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【0033】
本発明のサービス提供プログラムは、メモリに記憶されている、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、を用いて、コンピュータに、現在の車両情報および現在の道路情報を取得する処理と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、判定された前記現在の運転シーンに応じたサービスを提供する処理と、を実行させる。
【0034】
このプログラムによっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【発明の効果】
【0035】
本発明によれば、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【図面の簡単な説明】
【0036】
【図1】本発明の実施の形態における運転シーン判定装置の構成を示すブロック図
【図2】本発明の実施の形態における運転シーン対応情報(走行時)の説明図
【図3】本発明の実施の形態における運転シーン対応情報(停止時)の説明図
【図4】本発明の実施の形態におけるシーン遷移の可否の説明図
【図5】(a)右左折の運転シーンにおける車速と舵角の大きさの関係を示す図 (b)車線変更の運転シーンにおける車速と舵角の大きさの関係を示す図 (c)車線変更の運転シーンにおける車速と舵角変化率の大きさの関係を示す図
【図6】本発明の実施の形態における運転シーン判定装置の動作の流れを示すフロー図
【図7】本発明の実施の形態におけるワークロード推定装置の構成を示すブロック図
【図8】本発明の実施の形態におけるワークロードの推定の一例(定式化モデルを用いた例)を示す図
【図9】本発明の実施の形態におけるワークロードの推定の一例(確率推論モデルを用いた例)を示す図
【図10】本発明の実施の形態におけるワークロード推定装置の動作の流れを示すフロー図
【図11】本発明の実施の形態におけるサービス提供装置の構成を示すブロック図
【発明を実施するための形態】
【0037】
以下、本発明の実施の形態の運転シーン判定装置およびワークロード推定装置について、図面を用いて説明する。本実施の形態では、カーナビゲーション装置等に用いられる運転シーン判定装置やワークロード推定装置の場合を例示する。
【0038】
なお、以下では、第1の実施の形態として運転シーン判定装置の例を説明をし、第2の実施の形態としてワークロード推定装置の例を説明する。以下に説明するように、第1の実施の形態の装置は、運転シーン判定機能を備えており、第2の実施の形態の装置は、運転シーン判定機能に加えてワークロード推定機能を備えているが、これらの機能は、装置のHDDやメモリなど(図示せず)に格納されたプログラムによって実現される。
【0039】
(第1の実施の形態)
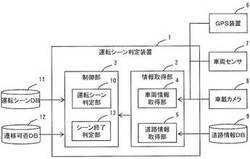
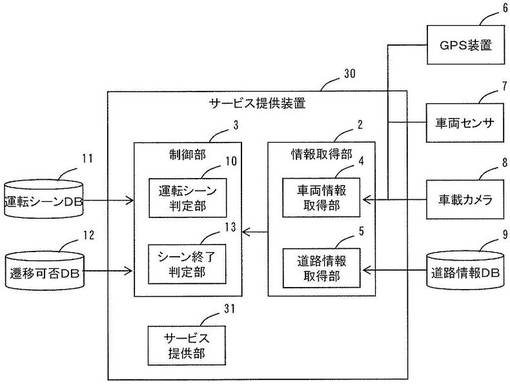
本発明の第1の実施の形態の運転シーン判定装置の構成を、図面を参照して説明する。図1は、本実施の形態の運転シーン判定装置の構成を示すブロック図である。図1に示すように、運転シーン判定装置1は、車両情報や道路情報などの各種の情報を取得する機能を有する情報取得部2と、運転シーンの判定に関する各種の処理を行う制御部3を備えている。情報取得部2は、ユーザが運転している車両に関する情報(車両情報)を取得するための車両情報取得部4と、車両が通行している道路に関する情報(道路情報)を取得するための道路情報取得部5で構成されている。また、制御部3は、CPUやマイコンなどで構成されている。
【0040】
車両情報取得部4は、車両の現在位置などの車両情報を、車両に搭載されたGPS装置6から取得する機能を備えている。また、この車両情報取得部4は、車速(km/時)、加速度(m/秒2)、舵角(°)(左回し:正、右回し:負)、左右のウィンカー(左右ターンSW)のオン/オフ、ハザードランプのオン/オフ、ブレーキ圧、サイドブレーキのオン/オフなどの車両情報を、車両に搭載された車両センサ7から取得する機能を備えている。また、この車両情報取得部4は、前方の車両との車間距離(m)、車両前方の停止線の有無、車両前方の横断歩道の有無、車両前方の信号の有無などの車両情報を、車両に搭載された車載カメラ8から取得する機能を備えている。本実施の形態では、車両情報取得部4は、図示しない車載LAN(例えば、CAN、AVC−LAN、BEANなど)を介して、これらの車両情報を取得する。
【0041】
道路情報取得部5は、大容量のHDDなどで構成された道路情報DB9(データベース)から道路情報を取得する機能を備えている。この道路情報には、交差点の位置(緯度経度など)、車線数(本)、道路種別(高速自動車道、国道、県道など)、道路の旋回半径(m)などの情報が含まれている。また、この道路情報には、交差点における信号の有無、交差点における停止線の有無、交差点における横断歩道の有無などの情報が含まれている。さらに、この道路情報には、交差点までの距離(m)(交差点の位置と車両の現在位置から算出される)が含まれている。
【0042】
制御部3は、情報取得部2によって取得した現在の車両情報と道路情報に基づいて、現在の運転シーンの判定を行う運転シーン判定部10を備えている。運転シーン判定部10は、HDDやメモリなどで構成された運転シーンDB11から、運転シーン対応情報を取得する機能を備えている。この運転シーン対応情報は、車両情報と道路情報に運転シーンが対応付けられた情報であり、本実施の形態では、予め設定されて運転シーンDB11に記憶されている。
【0043】
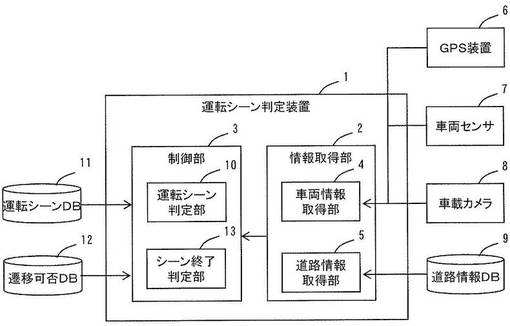
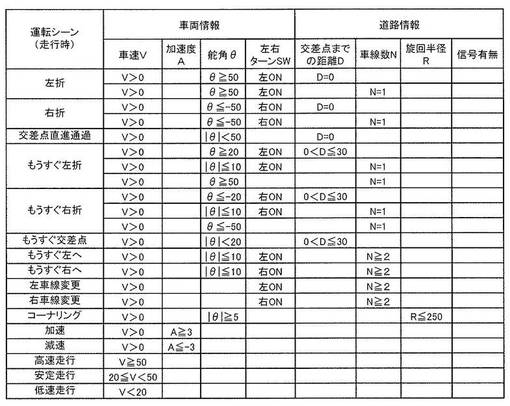
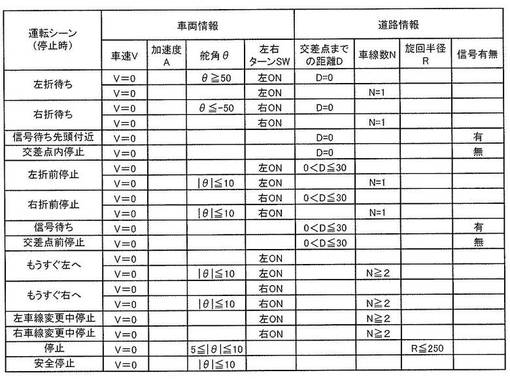
ここで、図2および図3を参照して、運転シーン対応情報をより具体的に説明する。図2は、車両走行時の運転シーン対応情報の一例を示す説明図であり、また、図3は、車両停止時の運転シーン対応情報の一例を示す説明図である。例えば、図2の例では、「左折」という運転シーンが、「車速」「舵角」「左右ターンSW」という車両情報および「交差点までの距離」という道路情報に対応付けられている。この場合、「車速V>0」「舵角θ≧50」「左ターンSW:ON」「交差点までの距離D=0」という条件に、「左折」という運転シーンが対応付けられているともいえる。また、この場合、「左折」という運転シーンは、「車速V>0」「舵角θ≧50」「左ターンSW:ON」「車線数N=1」という条件にも対応付けられている。
【0044】
なお、このような運転シーン対応情報は、現在の運転シーンごとに用意されていてもよい。例えば、運転シーンが「安定走行」である場合と「高速走行」である場合で、異なる運転シーン対応情報を用いてもよい。より具体的には、「安定走行」における運転シーン対応情報では、「高速走行」に対応付けられる条件が「車速V≧60」であり「安定走行」に対応付けられる条件が「20≦車速V<60」であって、一方、「高速走行」における運転シーン対応情報では、「高速走行」に対応付けられる条件が「車速V≧50」であり「安定走行」に対応付けられる条件が「20≦車速V<50」であってもよい。
【0045】
そして、運転シーン判定部10は、現在の運転シーンごとに用意された複数の運転シーン対応情報の中から現在の運転シーンに応じた運転シーン対応情報を選択して、現在の運転シーンの判定に用いる。つまり、上記の例では、「安定走行」時の運転シーン対応情報では、「高速走行」の運転シーンへ遷移するための車速の条件が「時速60km以上」に設定されるのに対して、「高速走行」時の運転シーン対応情報では、「安定走行」の運転シーンへ遷移するための車速の条件が「時速50km以下」に設定される。そして、「安定走行」時の運転シーン対応情報と「高速走行」時の運転シーン対応情報とで値が異なるのは、相互に遷移できる運転シーン(例えば「安定走行」と「高速走行」)に対応づけられる車両情報や道路情報の設定値(例えば「車速」の設定値)である。
【0046】
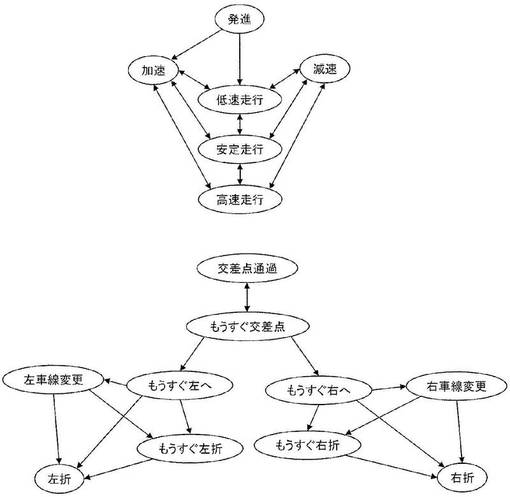
また、運転シーン判定部10は、HDDやメモリなどで構成された遷移可否DB12から、遷移可否情報を取得する機能を備えている。この遷移可否情報は、複数の運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す情報であり、本実施の形態では、予め設定されて遷移可否DB12に記憶されている。
【0047】
ここで、図4を参照して、遷移可否情報をより具体的に説明する。図4は、遷移可否情報の一例を示す説明図である。図4では、遷移可能である運転シーンが「矢印」で示されている。例えば、「発進」という運転シーンから「加速」と「低速走行」という運転シーンには遷移可能であるが、「減速」という運転シーンには遷移不可能であることが示されている。なお、図4は、あくまで一例である。つまり、図4の例では、走行シーン間でのシーン遷移のみが例示されているが、走行シーンと停止シーンとの間でのシーン遷移についての遷移可否情報を利用してよいことは言うまでもない。
【0048】
そして、運転シーン判定部10は、運転シーン対応情報と遷移可否情報を参照して、現在の車両情報と道路情報から現在の運転シーンを判定する。具体的には、運転シーン判定部10は、現在の車両情報と道路情報に対応付けられた運転シーンが一つ前の運転シーンから遷移可能である場合に、その運転シーンを現在の運転シーンであると判定する。
【0049】
例えば、交差点内で右左折をした後に、ハンドルを戻したときに(舵角を小さくしたときに)、ウィンカーが一緒に戻ってしまい、左右ターンSWがOFFになってしまうと、「車速V>0」「舵角|θ|<50」「交差点までの距離D=0」という条件を満たすことになり、遷移可否情報を参照しなければ「交差点直進通過(=本来は、交差点を直進して通過するときに選択されるべき運転シーン)」が現在の運転シーンとして判定されることになる。しかし、図4に示すように「右左折」から「交差点直進通過」へのシーン遷移は不可能であるため、現在の運転シーンが「交差点直進通過」であるとは判定されない。このような場合には、その前に「現在の運転シーン」として判定された「右左折」が、現在の運転シーンであると判定される。
【0050】
なお、ここでは、「交差点までの距離D=0」であれば交差点内であるとしているが、交差点内でに移動距離を考慮にいれて運転シーンを判定することも可能である。例えば、交差点に入ってからの移動距離(m)に応じて「信号待ち先頭付近」の運転シーンと「交差点内停止」の運転シーンとを判別することが可能になる。
【0051】
同様に、車線変更を行った後に、ハンドルを戻して舵角を小さくなると、「車速V>0」「舵角|θ|≦10」「車線数N≧2」という条件を満たすことになり、遷移可否情報を参照しなければ「もうすぐ左へ/もうすぐ右へ(=本来は、車線変更前/右左折前に選択されるべき運転シーン)」が現在の運転シーンとして判定されることになる。しかし、図4に示すように「車線変更」から「もうすぐ左へ」や「もうすぐ右へ」へのシーン遷移は不可能であるため、現在の運転シーンが「もうすぐ左へ/もうすぐ右へ」であるとは判定されない。このような場合、その前に「現在の運転シーン」として判定された「車線変更」が、現在の運転シーンであると判定される。
【0052】
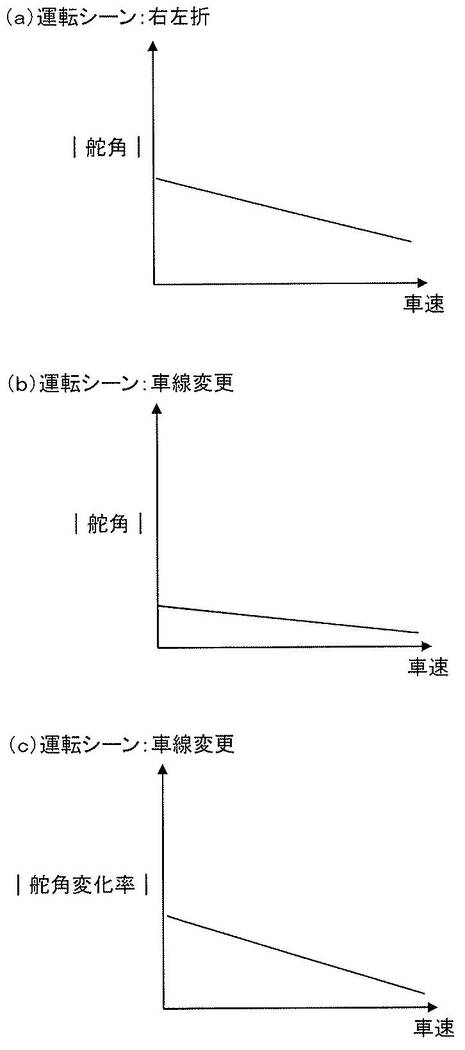
なお、「車線変更」や「右左折」に対応付けられる「舵角」の基準値は、図5(a)(b)に示すように、車両の車速が小さいほど大きく、車両の車速が大きいほど小さくなるように設定されてもよい。なお、図5(a)(b)では、|舵角|と車速との関係が一次関数である場合が例示されているが、これはあくまでも一例であり、|舵角|と車速との関係が他の関数(n次関数や三角関数など)であってもよいことは言うまでもない。図2の例では、「右左折」に対応付けられる「舵角」の基準値が、車速によらず一定値(θ≧50)であるが、例えば、車速が小さい(V<20)場合には舵角の基準値を大きく(θ≧60)、車速が大きい(V≧50)場合には舵角の基準値を小さく(θ≧40)してもよい。
【0053】
また、制御部3は、現在の車両情報に基づいて、現在の運転シーンが終了したか否かを判定するシーン終了判定部13を備えており、運転シーン判定部10は、現在の運転シーンが終了したと判定されるまで、前の運転シーンが継続しているとして現在の運転シーンの判定を行う。具体的には、シーン終了判定手段は、「舵角」と「舵角変化率」に基づいて、車線変更の運転シーンが終了したか否かを判定する。例えば、「舵角」が「正(左)→負(右)→正(左)→ゼロ(直進)」と変化し、かつ、「舵角変化率」の絶対値が「正(毎秒0°より大)→ゼロ(毎秒0°)」と変化した場合に、「左車線変更」の運転シーンが終了したと判定する。なお、舵角変化率の代わりに、ヨーレート(ヨー角変化率:ラジアン/秒)を利用してもよい。ヨーレートの情報は、車両に搭載されたヨーレートセンサ(図示せず)から取得することが可能である。
【0054】
なお、この場合の「舵角」や「舵角変化率」の基準値は、図5(b)(c)に示すように、車両の車速が小さいほど大きく、車両の車速が大きいほど小さくなるように設定されてもよい。例えば、車速が小さい(V<20)場合には舵角の基準値を大きく(θ≧60)、車速が大きい(V≧50)場合には舵角の基準値を小さく(θ≧40)してもよい。同様に、例えば、車速が小さい(V<20)場合には舵角変化率の基準値を大きく(例えば、毎秒10°)、車速が大きい(V≧50)場合には舵角変化率の基準値を小さく(例えば、毎秒0°)してもよい。なお、図5(c)では、|舵角変化率|と車速との関係が一次関数である場合が例示されているが、これはあくまでも一例であり、|舵角変化率|と車速との関係が他の関数(n次関数や三角関数など)であってよいことは言うまでもない。
【0055】
また、運転シーン判定部10は、第1の運転シーンから第2の運転シーンへシーン遷移した後に、第2の運転シーンから第1の運転シーンへ戻る場合に、第1の運転シーンと対応付けられている車両情報または道路情報(第1の運転シーンへ遷移する条件)を変更して、第1の運転シーンへ戻るのを困難にするヒステリシス制御を行う。
【0056】
例えば、「低速走行」の運転シーン(第1の運転シーン)から「加速」の運転シーン(第2の運転シーン)へ遷移するときには、「加速」の運転シーンへ遷移する条件が「加速度≧3m/秒2」であるとする。その後、「加速」の運転シーンから「低速走行」の運転シーンへ戻るときには、ヒステリシス制御によって、「低速走行」の運転シーンへ遷移する条件が「加速度<2m/秒2」に変更される。さらに、その後、「低速走行」の運転シーンから「加速」の運転シーンへ遷移するときには、ヒステリシス制御によって、「加速」の運転シーンへ遷移する条件が「加速度≧4m/秒2」に変更される。
【0057】
なお、ここでは、一次元のヒステリシス制御の場合(変更する条件(パラメータ)が一つの場合)を例示したが、多次元のヒステリシス制御が行われてよいことは言うまでもない。また、このヒステリシス制御では、パラメータ(第1の運転シーンへ遷移する条件)の変更のほかに、更なる条件を追加することによって、第1の運転シーンへ戻るのを困難にすることも可能である。
【0058】
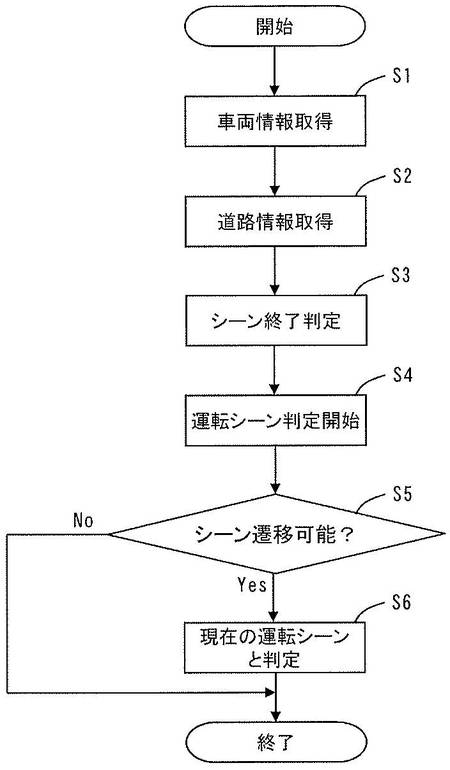
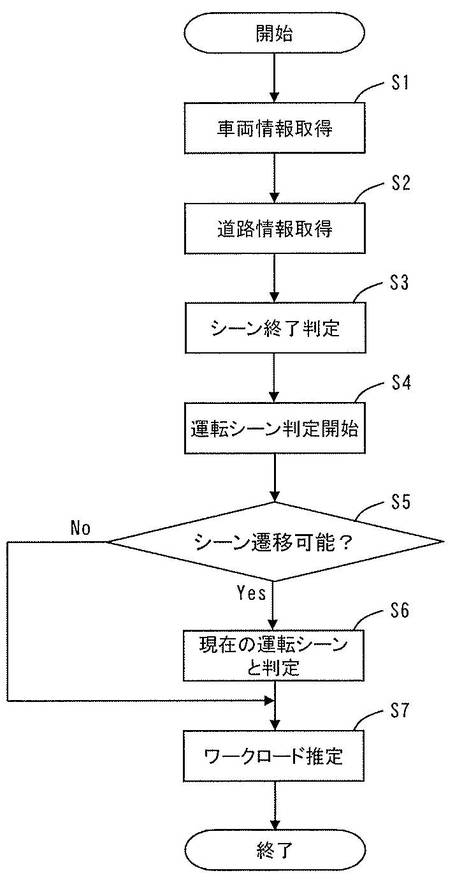
以上のように構成された本実施の形態の運転シーン判定装置1について、図6のフロー図を参照してその動作を説明する。
【0059】
本実施の形態の運転シーン判定装置1では、定期的に(例えば毎秒1回)運転シーンの判定が行われる。そして、運転シーンの判定が行われるときには、図6に示すように、まず、情報取得部2によって現在の車両情報と道路情報が取得される(S1、S2)。そして、現在の運転シーン判定の前処理として、前回の運転シーン判定で求めた運転シーン(車線変更など)が終了したか否かの判定を行い(S3)、その運転シーンが終了していた場合には、現在の運転シーン判定を開始する(S4)。
【0060】
現在の運転シーン判定では、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンが判定される。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に(S5)、その運転シーンが現在の運転シーンであると判定される(S6)。
【0061】
このような本発明の実施の形態の運転シーン判定装置1によれば、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができる。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定される。言い換えれば、現在の車両情報および現在の道路情報に対応付けられた運転シーンであっても、前の運転シーンから遷移可能でない場合には、現在の運転シーンでないと判定される。したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0062】
また、本実施の形態では、運転シーンごとに用意された複数の運転シーン対応情報の中から選択した運転シーン対応情報(現在の運転シーンに応じた運転シーン対応情報)を用いることによって、現在の運転シーンの判定を適切に行うことができる。
【0063】
この場合、運転シーンごとに用意された複数の運転シーン対応情報では、運転シーンに対応づけられる車両情報や道路情報が異なっているともいえる。そして、ある運転シーンの運転シーン対応情報と他の運転シーンの運転シーン対応情報とで異なるのは、相互に遷移できる運転シーンに対応づけられる車両情報や道路情報の設定値である。
【0064】
例えば、「安定走行」と「高速走行」とは相互に遷移できる運転シーンであるが、「安定走行」の運転シーンの運転シーン対応情報では、「高速走行」の運転シーンへ遷移するための車速の条件が「時速60km以上」に設定されるのに対して、「高速走行」の運転シーンの運転シーン対応情報では、「安定走行」の運転シーンへ遷移するための車速の条件が「時速50km以下」に設定される。これにより、時速60km近傍の車速で車両が走行している場合(時には時速61kmで走行し、時には時速59kmで走行するような場合)には、時速60kmを上回った時点(時速61kmになった時点)で運転シーンが「安定走行」から「高速走行」へ遷移した後は、時速60kmを少し下回った程度(時速59kmになった程度)では「高速走行」から「安定走行」へ運転シーンが遷移しない。このようにして、運転シーンの遷移が頻繁に発生するのを抑えることができる。
【0065】
また、本実施の形態では、「車線変更」または「右左折」の運転シーンに対応付けられる「舵角」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」または「右左折」の運転シーンの判定を、その車両の車速に応じて適切に行うことができる。
【0066】
また、本実施の形態では、現在の車両情報に基づいて、現在の運転シーンが終了したか否かが判定され、その運転シーンが終了したと判定されるまでは、前の運転シーンが継続しているとして現在の運転シーンの判定が行われる。したがって、前の運転シーンが終了しないうちは(前の運転シーンが継続しているときには)、車両情報や道路情報が別の運転シーンに対応するものであったとしても、その運転シーンが継続していると判定される。このようにして、運転シーンの継続中に他の運転シーンへ遷移するという誤判定を抑えることができる。
【0067】
この場合、「舵角」および「舵角変化率」に基づいて、「車線変更」の運転シーンが終了したか否かを適切に判定することができる。例えば、「舵角」が「正(左)→負(右)→正(左)→ゼロ(直進)」と変化し、かつ、「舵角変化率」の絶対値が「正(毎秒0°より大)→ゼロ(毎秒0°)」と変化した場合に、「左車線変更」の運転シーンが終了したと判定される。この場合、「舵角」および「舵角変化率」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」の運転シーンの終了判定を、その車両の車速に応じて適切に行うことができる。
【0068】
また、本実施の形態では、第1の運転シーン(例えば「低速走行」の運転シーン)から第2の運転シーン(例えば「加速」の運転シーン)へシーン遷移した後に、第2の運転シーンから第1の運転シーンへ戻る場合には、第1の運転シーンと対応付けられている車両情報または道路情報(例えば「加速度」の情報)を変更するヒステリシス制御が行われ、第1の運転シーンへ戻りにくくなる。このようなヒステリシス制御によって、運転シーンの遷移が頻繁に発生するのを抑えることができる。
【0069】
(第2の実施の形態)
次に、本発明の第2の実施の形態のワークロード推定装置20について説明する。本実施の形態のワークロード推定装置20は、第1の実施の形態の運転シーン判定装置1にワークロード推定機能が付加された装置である。したがって、ここでは、第2の実施の形態のワークロード推定装置20が、第1の実施の形態の運転シーン判定装置1と相違する点を中心に説明する。ここで特に言及しない限り、本実施の形態の構成および動作は、第1の実施の形態と同様である。
【0070】
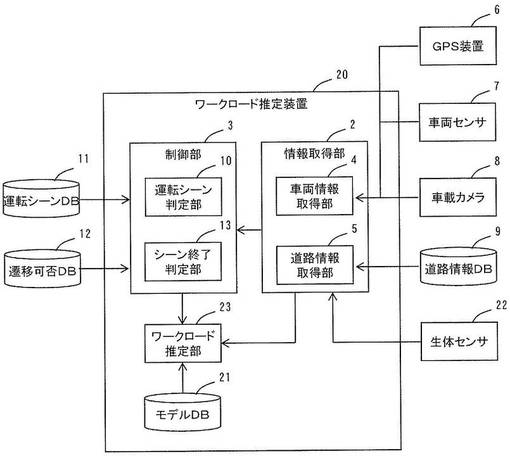
図7は、本実施の形態のワークロード推定装置20の構成を示すブロック図である。図7に示すように、ワークロード推定装置20は、第1の実施の形態の運転シーン判定装置1の構成に加えて、車両の運転に関連するワークロード値を算出するための定量化モデルが記憶されているモデルDB21(データベース)を備えている。定量化モデルは、ワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データを用いて、車両運転中のユーザの寄与行動からワークロード値を算出するためのモデルである。なお、定量化モデルや正解データの詳しい内容については、図面を用いて後述する。
【0071】
このワークロード推定装置20の情報取得部2は、車両センサ7や車載カメラ8(視線カメラを含む)や生体センサ22から、車両運転中のユーザの寄与行動に関するデータを取得する機能も備えている。よって、この情報取得部2は、本発明のデータ取得部にも相当する。そして、ワークロード推定装置20は、定量化モデルを用いて、車両運転中のユーザの寄与行動のデータからユーザのワークロード値を推定するワークロード推定部23を備えている。
【0072】
(ワークロードの種類)
ここで、車両運転中のユーザのワークロードの種類と、そのワークロードの寄与データについて説明する。車両運転中のユーザのワークロードには、車両を運転するときのユーザの運転操作に起因する運転ワークロードが含まれる。例えば、情報取得部2は、運転ワークロードの寄与行動に関するデータ(例えば、車両運転中の舵角データ、車速データ、車間距離データ、アクセル開度率データ、ブレーキ信号データなど)を、車両センサ7から取得する。
【0073】
また、車両運転中のユーザのワークロードには、車両に備えられた機器を操作するときのユーザの機器操作に起因する機器操作ワークロードが含まれる。情報取得部2は、機器操作ワークロードの寄与行動に関するデータ(例えば、車両運転中のナビ操作データ、オーディオ操作データ、エアコン操作データ、窓開閉操作データなど)を、車両センサ7から取得する。
【0074】
また、車両運転中のユーザのワークロードには、車両を運転するときのユーザの聴覚的動作に起因する聴覚的ワークロードが含まれている。情報取得部2は、聴覚的ワークロードの寄与行動に関するデータ(例えば、車両運転中の経路案内やオーディオ再生などに含まれる音声情報データや音楽情報データなど)を、車両センサ7から取得する。
【0075】
また、車両運転中のユーザのワークロードには、車両を運転するときのユーザの視覚的動作に起因する視覚的ワークロードが含まれる。情報取得部2は、視覚的ワークロードの寄与行動に関するデータ(例えば、車両運転中のユーザの視点移動速度データや視点座標データなど)を、視線カメラ4から取得する。
【0076】
また、車両運転中のユーザのワークロードには、車両を運転するときのユーザの心理状態に起因する内因的ワークロードが含まれる。情報取得部2は、内因的ワークロードの寄与行動に関するデータ(例えば、車両運転中のユーザの心拍数データ、血圧データ、呼吸回数データなど)を、生体センサ22から取得する。
【0077】
また、車両運転中のユーザのワークロードには、車両の運転シーンに起因する外因的ワークロードが含まれる。情報取得部2は、外因的ワークロードの寄与行動に関するデータ(例えば、現在の運転シーン)を、運転シーン判定部10から取得する。
【0078】
そして、ワークロード推定部23は、これらの複数のワークロード(運転ワークロード、機器操作ワークロード、聴覚的ワークロード、視覚的ワークロード、内因的ワークロード、外因的ワークロード)を要素として、車両運転中のユーザのワークロード値を推定する。具体的には、ワークロード推定部23は、モデルDB21に記憶されている定量化モデルを用いて、情報取得部2が取得した車両運転中のユーザの寄与行動のデータから、複数のワークロードごとのワークロード値を推定し、それらを要素として車両運転中のユーザのワークロード値を推定する。
【0079】
(定量化モデルを用いたワークロードの推定)
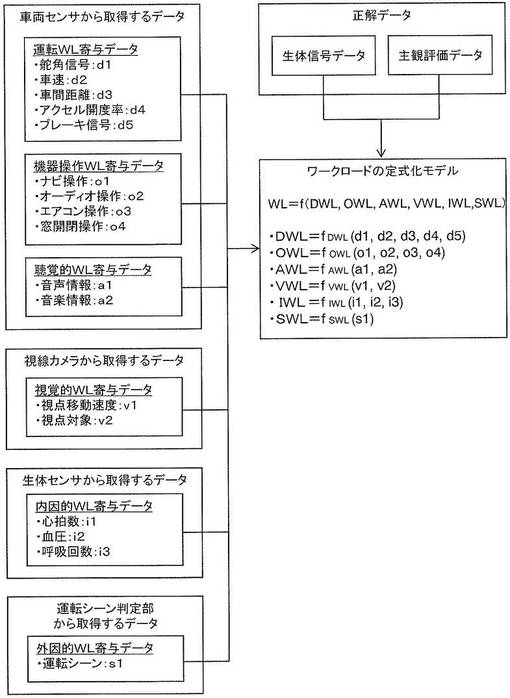
ここで、本実施の形態の特徴であるワークロードの推定について、図面を用いて説明する。図8は、本実施の形態におけるワークロードの推定の一例を示す説明図である。ここでは、図8に示すように、定量化モデルの一つとして定式化モデルを用いて、複数のワークロードごとにワークロード値の推定を行う場合を例示して説明する。この定式化には、例えば、線形重回帰分析、主成分分析、因子分析などの統計的手法が用いられる。
【0080】
図8に示すように、運転ワークロードに寄与するデータ(運転WL寄与データ)には、車両運転中の舵角d1(度)、車速d2(km/h)、車間距離d3(m)、アクセル開度率d4(%)、ブレーキ信号d5(ON:1、OFF:0)のデータが含まれる。これらのデータd1〜d5と正解データ(後述する)との関係を統計的手法などで導くことにより、下記の式1のように運転ワークロード(DWL)の定式化が行われる。
DWL=α(n)×d1/360+β(n)×d2/100+γ(n)/d3
+δ(n)×d4/100+ε×d5 (式1)
【0081】
ここで、α、β、γ、δ、εは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。この慣れ係数は、ユーザの走行履歴に基づいて定められる係数である。重み付け係数αを例示して説明すると、ユーザが初めて車両走行をした場合(n=1)の重み付け係数は、α(1)となり、ユーザが二度目に車両走行した場合(n=2)の重み付け係数は、α(2)となる。つまり、この定式化モデルは、ユーザの車両運転に関する慣れを考慮した重み付け処理がなされているともいえる。
【0082】
また、機器操作ワークロードに寄与するデータ(機器操作WL寄与データ)には、車両運転中のナビ操作o1(ハードウェアボタン操作:A1、タッチパネル操作:A2など)、オーディオ操作o2(スキップボタン操作:A3、ボリューム操作:A4など)、エアコン操作o3(操作あり:1、操作なし:0)、窓開閉操作o4(操作あり:1、操作なし:0)のデータが含まれる。これらのデータo1〜o4と正解データとの関係を統計的手法などで導くことにより、下記の式2のように機器操作ワークロード(OWL)の定式化が行われる。
OWL=α(n)×o1+β(n)×o2
+γ(n)×o3+δ(n)×o4 (式2)
なお、A1〜A4は、それぞれ所定の定数である。また、α、β、γ、δは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0083】
また、聴覚的ワークロードに寄与するデータ(聴覚的WL寄与データ)には、車両運転中の経路案内やオーディオ再生などに含まれる音声情報a1(経路案内:B1、施設情報案内:B2、電話:B3など)、音楽情報a2(クラシック:B4、ロック:B5、お気に入りの曲:B6など)のデータが含まれる。これらのデータa1、a2と正解データとの関係を統計的手法などで導くことにより、下記の式3のように聴覚的ワークロード(AWL)の定式化が行われる。
AWL=α(n)×a1+β(n)×a2 (式3)
なお、B1〜B6は、それぞれ所定の定数である。また、α、βは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0084】
また、視覚的ワークロードに寄与するデータ(視覚的WL寄与データ)には、車両運転中の視点移動速度v1(mm/秒)、視点座標v2(ルームミラー:C1、サイドミラー:C2、ナビ:C3など)のデータが含まれる。これらのデータv1、v2と正解データとの関係を統計的手法などで導くことにより、下記の式4のように視覚的ワークロード(VWL)の定式化が行われる。
VWL=α(n)×v1+β(n)×v2 (式4)
なお、C1〜C6は、それぞれ所定の定数である。また、α、βは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0085】
また、内因的ワークロードに寄与するデータ(内因的WL寄与データ)には、車両運転中の心拍数i1(回/分)、血圧i2(mmHg)、呼吸回数i3(回/分)のデータが含まれる。これらのデータi1〜i3と正解データとの関係を統計的手法などで導くことにより、下記の式5のように内因的ワークロード(IWL)の定式化が行われる。
IWL=α(n)×i1+β(n)×i2+γ(n)×i3 (式5)
なお、α、β、γは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0086】
また、外因的ワークロードに寄与するデータ(外因的WL寄与データ)には、現在の運転シーンのデータが含まれる。これらのデータs1と正解データとの関係を統計的手法などで導くことにより、下記の式6のように外因的ワークロード(SWL)の定式化が行われる。
SWL=α(n)×f(s1) (式6)
なお、fは、運転シーンを数値化する関数(入力値である運転シーンごとに所定の出力値が設定されていてもよい)であり、αは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0087】
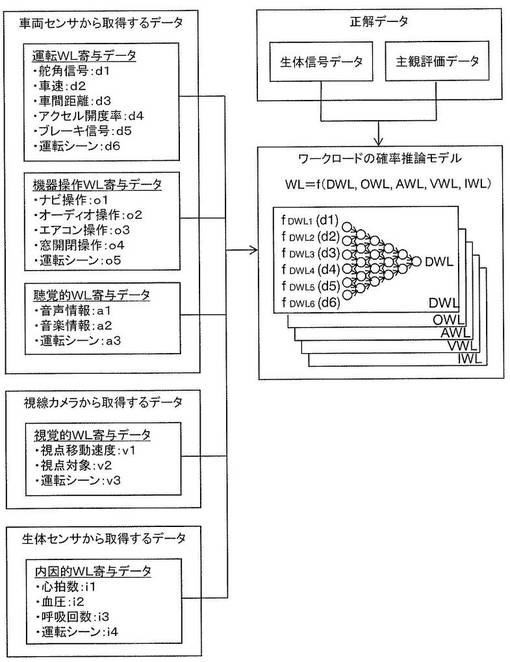
以上では、定式化モデルを用いたワークロードの推定の例について説明したが、本発明の範囲は、これに限定されるものではない。例えば、図9に示すように、ワークロードの推定には、確率推論モデルが用いられてもよい。
【0088】
確率推論モデルとしては、例えば、ベイジアンネットワークやニューラルネットワーク等が用いられる。運転シーンのデータは、各ワークロード値を推定するときに用いられてもよい。例えば、運転ワークロードを例示して具体的に説明すると、運転ワークロードに寄与するデータ(運転WL寄与データ)である舵角d1(度)、車速d2(km/h)、車間距離d3(m)、アクセル開度率d4(%)、ブレーキ信号d5(ON:1、OFF:0)、運転シーンd6のデータを入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として運転ワークロード(DWL)のワークロード値の推定が行われる。
【0089】
同様に、機器操作ワークロードについては、上述の機器操作WL寄与データ(o1〜o4)および運転シーンのデータo5を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として機器操作ワークロード(OWL)のワークロード値の推定が行われる。
【0090】
また、聴覚的ワークロードについては、上述の聴覚的WL寄与データ(a1、a2)および運転シーンのデータa3を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として聴覚的ワークロード(AWL)のワークロード値の推定が行われる。
【0091】
また、視覚的ワークロードについては、上述の視覚的WL寄与データ(v1、v2)および運転シーンのデータv3を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として視覚的ワークロード(VWL)のワークロード値の推定が行われる。
【0092】
また、内因的ワークロードについては、上述の内因的WL寄与データ(i1〜i3)および運転シーンのデータi4を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として内因的ワークロード(IWL)のワークロード値の推定が行われる。
【0093】
なお、定量化モデル(定式化モデルや確率推論モデル)を構築する際には、正解データを利用するとともに、ユーザのプロフィール(年齢、性別、運転暦)などを考慮してもよい。
【0094】
(正解データ)
つぎに、定量化モデルの構築に用いられる正解データについて説明する。本実施の形態では、二種類の正解データ(生体信号指標と主観評価指標)を利用して、定量化モデルの構築が行われる。なお、定量化モデルの構築は、各ワークロードのモデル化(定量化)ということもできる。
【0095】
ここでは、生体信号指標として、瞳孔反応を例示して説明するが、本発明の範囲はこれに限定されない。本発明の生体信号指標には、瞳孔反応のほかに、心拍数変動、呼吸数変動、生体電位変動などが含まれる。
【0096】
一般に、瞳孔が散瞳(瞳孔半径が大きくなる)している場合には、交感神経が刺激され、ユーザは興奮している。逆に、瞳孔が縮瞳(瞳孔半径が小さくなる)している場合には、副交感神経が刺激され、ユーザはリラックスしている。そして、瞳孔反応(瞳孔半径変化速度)が大きいほど、ユーザに加わるワークロードは高く、瞳孔反応が小さいほど、ユーザに加わるワークロードは低い。
【0097】
本実施の形態では、所定の実験コースをユーザが走行したときの車両運転中のユーザの瞳孔反応の時系列のデータを取得し、車両の運転との対応を解析する。例えば、出発時には、瞳孔反応が小さく、左折や右折、すれ違いや追越しなどを行うときに、瞳孔反応が大きくなっている。このような瞳孔反応の正解データから、各ワークロードの寄与行動を行っている部分を抽出して、その部分の瞳孔反応の大きさや変化率等に基づいて、各ワークロードの定式化が行われる。
【0098】
ここで、運転ワークロードの定式化を例にして説明する。例えば、瞳孔反応の正解データから、運転ワークロードの寄与行動を行っている部分(例えば右折の部分)を抽出して、そのときの運転WL寄与データ(舵角信号、車速、車間距離、アクセル開度率、ブレーキ信号のデータ)との関係を統計的手法で導いて、運転ワークロードの定式化が行われる。つまり、この瞳孔反応の正解データに基づいて、運転WL寄与データから運転ワークロードのワークロード値を算出するための定式化モデル(上記の式1)が求められる。
【0099】
以上、瞳孔反応の正解データから運転ワークロードの定式化を行う例について説明した。なお、ここでは説明を省略するが、これと同様にして、機器操作ワークロード、聴覚的ワークロード、視覚的ワークロード、内因的ワークロードの定式化が行われる。
【0100】
つぎに、主観評価指標の正解データについて説明する。ここでは、主観評価指標として、従前のNASA−TLXを例示して説明するが、本発明の範囲はこれに限定されない。例えば、従前のNASA−TLXの代わりに、映像を見ながら事後的にPC上で主観評価を行う連続的なNASA−TLX(時系列のNASA−TLX)を用いてもよい。本発明の主観評価指標には、NASA−TLXのほかに、SWAT、MCHなどが含まれる。
【0101】
NASA−TLXは、ワークロードをユーザが主観的に定量化する指標であり、一般に、その値が大きいほど、ユーザのワークロードが高く、その値が小さいほど、ユーザのワークロードは低い。
【0102】
本実施の形態では、所定の実験コースをユーザが走行したときの車両運転中のユーザのNASA−TLXの時系列のデータを取得し、車両の運転との対応を解析する。例えば、出発時や左折時や右折時に、NASA−TLXの値が大きく、直進時に、NASA−TLXの値が小さくなっている。このようなNASA−TLXの正解データから、各ワークロードの寄与行動を行っている部分を抽出して、その部分のNASA−TLXの値の大きさや変化率等に基づいて、各ワークロードの定式化が行われる。
【0103】
ここで、運転ワークロードの定式化を例にして説明する。例えば、NASA−TLXの正解データから、運転ワークロードの寄与行動を行っている部分(例えば右折の部分)を抽出して、そのときの運転WL寄与データ(舵角信号、車速、車間距離、アクセル開度率、ブレーキ信号のデータ)との関係を統計的手法で導いて、運転ワークロードの定式化が行われる。つまり、このNASA−TLXの正解データに基づいて、運転WL寄与データから運転ワークロードのワークロード値を算出するための定式化モデル(上記の式1)が求められる。
【0104】
以上、NASA−TLXの正解データから運転ワークロードの定式化を行う例について説明した。なお、ここでは説明を省略するが、これと同様にして、機器操作ワークロード、聴覚的ワークロード、視覚的ワークロード、内因的ワークロードの定式化が行われる。
【0105】
以上のように構成されたワークロード推定装置20について、図10のフロー図を用いてその動作を説明する。
【0106】
本実施の形態のワークロード推定装置20では、現在の運転シーンの判定を行い、その現在の運転シーンを利用してワークロードの推定が行われる。すなわち、第1の実施の形態と同様に、まず、情報取得部2によって現在の車両情報と道路情報が取得される(S1、S2)。そして、現在の運転シーン判定の前処理として、前回の運転シーン判定で求めた運転シーン(車線変更など)が終了したか否かの判定を行い(S3)、その運転シーンが終了していた場合には、現在の運転シーン判定を開始する(S4)。
【0107】
現在の運転シーン判定では、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンが判定される。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に(S5)、その運転シーンが現在の運転シーンであると判定される(S6)。そして、この現在の運転シーンを用いてワークロードの推定が行われる(S7)。
【0108】
このような本発明の第2の実施の形態の運転シーン判定装置1によっても、第1の実施の形態と同様の作用効果が奏される。
【0109】
すなわち、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0110】
その上、本実施の形態では、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0111】
(第3の実施の形態)
次に、本発明の第3の実施の形態のサービス提供装置30について説明する。本実施の形態のサービス提供装置30は、第1の実施の形態の運転シーン判定装置1にサービス提供機能が付加された装置である。したがって、ここでは、第3の実施の形態のサービス提供装置30が、第1の実施の形態の運転シーン判定装置1と相違する点を中心に説明する。ここで特に言及しない限り、本実施の形態の構成および動作は、第1の実施の形態と同様である。
【0112】
図11は、本実施の形態におけるサービス提供装置30の構成を示すブロック図である。図11に示すように、ワークロード推定装置20は、第1の実施の形態の運転シーン判定装置1の構成に加えて、現在の運転シーンに応じたサービスを提供するサービス提供部31を備えている。
【0113】
例えば、このサービス提供部31は、現在の運転シーンに応じたサービスとして、ドライバーや同乗者に対して、運転シーン名を通知(画面への表示、音声での読み上げなど)するサービスを実行する。このような運転シーン名の通知サービスは、ネットワーク経由で社外の人に対して実行してもよい。また、このサービス提供部31は、各運転シーンに割り当てられたサービスを実行してもよい。例えば、特定のシーン(例えば、右左折や車線変更など)で、オーディオのボリュームを下げるサービスや、警告音を鳴らすサービスなどを実行してもよい。
【0114】
このような本発明の第3の実施の形態のサービス提供装置によっても、第1の実施の形態と同様の作用効果が奏される。
【0115】
すなわち、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0116】
その上、本実施の形態では、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【0117】
以上、本発明の実施の形態を例示により説明したが、本発明の範囲はこれらに限定されるものではなく、請求項に記載された範囲内において目的に応じて変更・変形することが可能である。
【産業上の利用可能性】
【0118】
以上のように、本発明にかかる運転シーン判定装置は、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができるという効果を有し、例えばカーナビゲーション装置等に適用され、有用である。
【符号の説明】
【0119】
1 運転シーン判定装置
2 情報取得部
3 制御部
4 車両情報取得部
5 道路情報取得部
6 GPS装置
7 車両センサ
8 車載カメラ
9 道路情報DB
10 運転シーン判定部
11 運転シーンDB
12 遷移可否DB
13 シーン終了判定部
20 ワークロード推定装置
21 モデルDB
22 生体センサ
23 ワークロード推定部
30 サービス提供装置
【技術分野】
【0001】
本発明は、運転シーンを判定する機能を備えた運転シーン判定装置に関し、特に、運転シーンの判定精度を向上する技術に関する。
【背景技術】
【0002】
従来、「信号待ち」や「急停車」などの運転シーンを判定する機能を備えたシステムが提案されている(例えば特許文献1参照)。従来のシステムでは、車両状態検出装置(車速センサや操舵角センサや加速度センサなど)から得られる情報に基づいて運転シーンの決定が行われる。この車両状態検出装置には、ナビゲーション装置も含まれており、自車両の位置情報やルート情報等も、運転シーンの決定に利用することができる。
【0003】
この従来のシステムでは、運転シーンの決定を行うために、車両状態検出装置からの出力を継続的に監視し、それらの出力値と既登録の運転シーンに対応する条件(車速、車両位置などから構成される)とを照合する。そして、照合の結果、条件と完全に合致する運転シーンが存在する場合に、その運転シーンが現在の運転シーンとして決定される。なお、照合の結果、条件が完全に満たされる運転シーンが存在しない場合には、所定の適合率(条件が満たされる度合い。例えば、車速の条件は満たすが、車両位置の条件は満たさない等。)を上回る運転シーンが、現在の運転シーンとして決定される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−290584号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のシステムにおいては、条件と完全に合致する運転シーンが存在する場合には、必ず、その運転シーンが現在の運転シーンとして決定されることになるが、照合に用いる条件(運転シーンに対応する条件)が必ずしも完全なものであるとは限らない。つまり、通常、運転シーンに対応する条件として用意できるものは、その条件に概ね合致すれば大体その運転シーンであろうという程度のものであり、したがって、照合の結果、その条件と完全に合致したからといって、現在の運転シーンとして決定したものが必ずしも正しいとは限らない。このように、従来のシステムでは、条件と完全に合致する運転シーンが存在する場合に発生する「運転シーンの誤判定」について何らの考慮もなされていなかった。したがって、条件と完全に合致したというだけで、実際とは異なる運転シーンが現在の運転シーンとして決定されてしまう(運転シーンの誤判定が発生する)という問題があった。
【0006】
本発明は、上記の課題に鑑みてなされたもので、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を向上することのできる運転シーン判定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の運転シーン判定装置は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、現在の車両情報および現在の道路情報を取得する情報取得手段と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する運転シーン判定手段と、を備え、前記運転シーン判定手段は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する。
【0008】
これにより、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができる。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定される。言い換えれば、現在の車両情報および現在の道路情報に対応付けられた運転シーンであっても、前の運転シーンから遷移可能でない場合には、現在の運転シーンでないと判定される。したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0009】
また、本発明の運転シーン判定装置では、前記運転シーン記憶部は、前記現在の運転シーンごとに用意された複数の前記運転シーン対応情報を記憶し、前記運転シーン判定手段は、前記複数の運転シーン対応情報の中から前記現在の運転シーンに応じた運転シーン対応情報を選択して、前記現在の運転シーンの判定に用いてもよい。
【0010】
これにより、運転シーンごとに用意された複数の運転シーン対応情報の中から選択した運転シーン対応情報(現在の運転シーンに応じた運転シーン対応情報)を用いることによって、現在の運転シーンの判定を適切に行うことができる。
【0011】
また、本発明の運転シーン判定装置では、前記運転シーンには、車線変更または右左折が含まれており、前記車線変更または右左折に対応付けられる前記車両情報には、舵角が含まれており、前記舵角の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さくてもよい。
【0012】
これにより、「車線変更」または「右左折」の運転シーンに対応付けられる「舵角」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」または「右左折」の運転シーンの判定を、その車両の車速に応じて適切に行うことができる。
【0013】
また、本発明の運転シーン判定装置は、前記現在の車両情報に基づいて、前記現在の運転シーンが終了したか否かを判定するシーン終了判定手段を備え、前記運転シーン判定手段は、前記現在の運転シーンが終了したと判定されるまで、前の運転シーンが継続しているとして前記現在の運転シーンの判定を行ってもよい。
【0014】
これにより、現在の車両情報に基づいて、現在の運転シーンが終了したか否かが判定され、その運転シーンが終了したと判定されるまでは、前の運転シーンが継続しているとして現在の運転シーンの判定が行われる。したがって、前の運転シーンが終了しないうちは(前の運転シーンが継続しているときには)、車両情報や道路情報が別の運転シーンに対応するものであったとしても、その運転シーンが継続していると判定される。このようにして、運転シーンの継続中に他の運転シーンへ遷移するという誤判定を抑えることができる。
【0015】
また、本発明の運転シーン判定装置では、前記シーン終了判定手段は、前記車両情報に含まれる舵角および舵角変化率に基づいて、車線変更の運転シーンが終了したか否かを判定し、前記舵角および前記舵角変化率の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さくてもよい。
【0016】
これにより、「舵角」および「舵角変化率」に基づいて、「車線変更」の運転シーンが終了したか否かを適切に判定することができる。例えば、「舵角」が「正(左)→負(右)→正(左)→ゼロ(直進)」と変化し、かつ、「舵角変化率」の絶対値が「正(毎秒0°より大)→ゼロ(毎秒0°)」と変化した場合に、「左車線変更」の運転シーンが終了したと判定される。この場合、「舵角」および「舵角変化率」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」の運転シーンの終了判定を、その車両の車速に応じて適切に行うことができる。
【0017】
また、本発明の運転シーン判定装置では、前記運転シーン判定手段は、第1の運転シーンから第2の運転シーンへシーン遷移した後に前記第2の運転シーンから前記第1の運転シーンへ戻る場合に、前記第1の運転シーンと対応付けられている前記車両情報または前記道路情報を変更して、前記第1の運転シーンへ戻るのを困難にするヒステリシス制御を行う。
【0018】
これにより、第1の運転シーンから第2の運転シーンへシーン遷移した後に、第2の運転シーンから第1の運転シーンへ戻る場合には、第1の運転シーンと対応付けられている車両情報または道路情報を変更するヒステリシス制御が行われ、第1の運転シーンへ戻りにくくなる。このようなヒステリシス制御によって、運転シーンの遷移が頻繁に発生するのを抑えることができる。
【0019】
本発明の運転シーン判定方法は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、現在の車両情報および現在の道路情報を取得し、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する方法において、前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する。
【0020】
この方法によっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0021】
本発明の運転シーン判定プログラムは、メモリに記憶されている、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、を用いて、コンピュータに、現在の車両情報および現在の道路情報を取得する処理と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する処理と、を実行させるプログラムにおいて、前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する。
【0022】
このプログラムによっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0023】
本発明のワークロード推定装置は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、現在の車両情報および現在の道路情報を取得する情報取得手段と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されているモデル記憶手段と、車両運転中のユーザから前記寄与行動に関するデータを取得するデータ取得手段と、前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定するワークロード推定手段と、を備え、前記ワークロード推定手段は、前記車両運転中のユーザの寄与行動として、前記運転シーン判定手段によって判定された前記現在の運転シーンを用いる。
【0024】
これにより、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0025】
本発明のワークロード推定方法は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されており、現在の車両情報および現在の道路情報を取得し、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、車両運転中のユーザから前記寄与行動に関するデータを取得し、前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する方法において、前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定によって得られた前記現在の運転シーンを用いる。
【0026】
この方法によっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0027】
本発明のワークロード推定プログラムは、メモリに記憶されている、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルと、を用いて、コンピュータに、現在の車両情報および現在の道路情報を取得する処理と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、車両運転中のユーザから前記寄与行動に関するデータを取得する処理と、前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する処理と、を実行させるプログラムにおいて、前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定する処理によって得られた前記現在の運転シーンを用いる。
【0028】
このプログラムによっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0029】
本発明のサービス提供装置は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、現在の車両情報および現在の道路情報を取得する情報取得手段と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、判定された前記現在の運転シーンに応じたサービスを提供するサービス提供手段と、を備えている。
【0030】
これにより、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【0031】
本発明のサービス提供方法は、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、現在の車両情報および現在の道路情報を取得し、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、判定された前記現在の運転シーンに応じたサービスを提供する。
【0032】
この方法によっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【0033】
本発明のサービス提供プログラムは、メモリに記憶されている、ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、を用いて、コンピュータに、現在の車両情報および現在の道路情報を取得する処理と、前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、判定された前記現在の運転シーンに応じたサービスを提供する処理と、を実行させる。
【0034】
このプログラムによっても、上記と同様、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。そして、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【発明の効果】
【0035】
本発明によれば、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【図面の簡単な説明】
【0036】
【図1】本発明の実施の形態における運転シーン判定装置の構成を示すブロック図
【図2】本発明の実施の形態における運転シーン対応情報(走行時)の説明図
【図3】本発明の実施の形態における運転シーン対応情報(停止時)の説明図
【図4】本発明の実施の形態におけるシーン遷移の可否の説明図
【図5】(a)右左折の運転シーンにおける車速と舵角の大きさの関係を示す図 (b)車線変更の運転シーンにおける車速と舵角の大きさの関係を示す図 (c)車線変更の運転シーンにおける車速と舵角変化率の大きさの関係を示す図
【図6】本発明の実施の形態における運転シーン判定装置の動作の流れを示すフロー図
【図7】本発明の実施の形態におけるワークロード推定装置の構成を示すブロック図
【図8】本発明の実施の形態におけるワークロードの推定の一例(定式化モデルを用いた例)を示す図
【図9】本発明の実施の形態におけるワークロードの推定の一例(確率推論モデルを用いた例)を示す図
【図10】本発明の実施の形態におけるワークロード推定装置の動作の流れを示すフロー図
【図11】本発明の実施の形態におけるサービス提供装置の構成を示すブロック図
【発明を実施するための形態】
【0037】
以下、本発明の実施の形態の運転シーン判定装置およびワークロード推定装置について、図面を用いて説明する。本実施の形態では、カーナビゲーション装置等に用いられる運転シーン判定装置やワークロード推定装置の場合を例示する。
【0038】
なお、以下では、第1の実施の形態として運転シーン判定装置の例を説明をし、第2の実施の形態としてワークロード推定装置の例を説明する。以下に説明するように、第1の実施の形態の装置は、運転シーン判定機能を備えており、第2の実施の形態の装置は、運転シーン判定機能に加えてワークロード推定機能を備えているが、これらの機能は、装置のHDDやメモリなど(図示せず)に格納されたプログラムによって実現される。
【0039】
(第1の実施の形態)
本発明の第1の実施の形態の運転シーン判定装置の構成を、図面を参照して説明する。図1は、本実施の形態の運転シーン判定装置の構成を示すブロック図である。図1に示すように、運転シーン判定装置1は、車両情報や道路情報などの各種の情報を取得する機能を有する情報取得部2と、運転シーンの判定に関する各種の処理を行う制御部3を備えている。情報取得部2は、ユーザが運転している車両に関する情報(車両情報)を取得するための車両情報取得部4と、車両が通行している道路に関する情報(道路情報)を取得するための道路情報取得部5で構成されている。また、制御部3は、CPUやマイコンなどで構成されている。
【0040】
車両情報取得部4は、車両の現在位置などの車両情報を、車両に搭載されたGPS装置6から取得する機能を備えている。また、この車両情報取得部4は、車速(km/時)、加速度(m/秒2)、舵角(°)(左回し:正、右回し:負)、左右のウィンカー(左右ターンSW)のオン/オフ、ハザードランプのオン/オフ、ブレーキ圧、サイドブレーキのオン/オフなどの車両情報を、車両に搭載された車両センサ7から取得する機能を備えている。また、この車両情報取得部4は、前方の車両との車間距離(m)、車両前方の停止線の有無、車両前方の横断歩道の有無、車両前方の信号の有無などの車両情報を、車両に搭載された車載カメラ8から取得する機能を備えている。本実施の形態では、車両情報取得部4は、図示しない車載LAN(例えば、CAN、AVC−LAN、BEANなど)を介して、これらの車両情報を取得する。
【0041】
道路情報取得部5は、大容量のHDDなどで構成された道路情報DB9(データベース)から道路情報を取得する機能を備えている。この道路情報には、交差点の位置(緯度経度など)、車線数(本)、道路種別(高速自動車道、国道、県道など)、道路の旋回半径(m)などの情報が含まれている。また、この道路情報には、交差点における信号の有無、交差点における停止線の有無、交差点における横断歩道の有無などの情報が含まれている。さらに、この道路情報には、交差点までの距離(m)(交差点の位置と車両の現在位置から算出される)が含まれている。
【0042】
制御部3は、情報取得部2によって取得した現在の車両情報と道路情報に基づいて、現在の運転シーンの判定を行う運転シーン判定部10を備えている。運転シーン判定部10は、HDDやメモリなどで構成された運転シーンDB11から、運転シーン対応情報を取得する機能を備えている。この運転シーン対応情報は、車両情報と道路情報に運転シーンが対応付けられた情報であり、本実施の形態では、予め設定されて運転シーンDB11に記憶されている。
【0043】
ここで、図2および図3を参照して、運転シーン対応情報をより具体的に説明する。図2は、車両走行時の運転シーン対応情報の一例を示す説明図であり、また、図3は、車両停止時の運転シーン対応情報の一例を示す説明図である。例えば、図2の例では、「左折」という運転シーンが、「車速」「舵角」「左右ターンSW」という車両情報および「交差点までの距離」という道路情報に対応付けられている。この場合、「車速V>0」「舵角θ≧50」「左ターンSW:ON」「交差点までの距離D=0」という条件に、「左折」という運転シーンが対応付けられているともいえる。また、この場合、「左折」という運転シーンは、「車速V>0」「舵角θ≧50」「左ターンSW:ON」「車線数N=1」という条件にも対応付けられている。
【0044】
なお、このような運転シーン対応情報は、現在の運転シーンごとに用意されていてもよい。例えば、運転シーンが「安定走行」である場合と「高速走行」である場合で、異なる運転シーン対応情報を用いてもよい。より具体的には、「安定走行」における運転シーン対応情報では、「高速走行」に対応付けられる条件が「車速V≧60」であり「安定走行」に対応付けられる条件が「20≦車速V<60」であって、一方、「高速走行」における運転シーン対応情報では、「高速走行」に対応付けられる条件が「車速V≧50」であり「安定走行」に対応付けられる条件が「20≦車速V<50」であってもよい。
【0045】
そして、運転シーン判定部10は、現在の運転シーンごとに用意された複数の運転シーン対応情報の中から現在の運転シーンに応じた運転シーン対応情報を選択して、現在の運転シーンの判定に用いる。つまり、上記の例では、「安定走行」時の運転シーン対応情報では、「高速走行」の運転シーンへ遷移するための車速の条件が「時速60km以上」に設定されるのに対して、「高速走行」時の運転シーン対応情報では、「安定走行」の運転シーンへ遷移するための車速の条件が「時速50km以下」に設定される。そして、「安定走行」時の運転シーン対応情報と「高速走行」時の運転シーン対応情報とで値が異なるのは、相互に遷移できる運転シーン(例えば「安定走行」と「高速走行」)に対応づけられる車両情報や道路情報の設定値(例えば「車速」の設定値)である。
【0046】
また、運転シーン判定部10は、HDDやメモリなどで構成された遷移可否DB12から、遷移可否情報を取得する機能を備えている。この遷移可否情報は、複数の運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す情報であり、本実施の形態では、予め設定されて遷移可否DB12に記憶されている。
【0047】
ここで、図4を参照して、遷移可否情報をより具体的に説明する。図4は、遷移可否情報の一例を示す説明図である。図4では、遷移可能である運転シーンが「矢印」で示されている。例えば、「発進」という運転シーンから「加速」と「低速走行」という運転シーンには遷移可能であるが、「減速」という運転シーンには遷移不可能であることが示されている。なお、図4は、あくまで一例である。つまり、図4の例では、走行シーン間でのシーン遷移のみが例示されているが、走行シーンと停止シーンとの間でのシーン遷移についての遷移可否情報を利用してよいことは言うまでもない。
【0048】
そして、運転シーン判定部10は、運転シーン対応情報と遷移可否情報を参照して、現在の車両情報と道路情報から現在の運転シーンを判定する。具体的には、運転シーン判定部10は、現在の車両情報と道路情報に対応付けられた運転シーンが一つ前の運転シーンから遷移可能である場合に、その運転シーンを現在の運転シーンであると判定する。
【0049】
例えば、交差点内で右左折をした後に、ハンドルを戻したときに(舵角を小さくしたときに)、ウィンカーが一緒に戻ってしまい、左右ターンSWがOFFになってしまうと、「車速V>0」「舵角|θ|<50」「交差点までの距離D=0」という条件を満たすことになり、遷移可否情報を参照しなければ「交差点直進通過(=本来は、交差点を直進して通過するときに選択されるべき運転シーン)」が現在の運転シーンとして判定されることになる。しかし、図4に示すように「右左折」から「交差点直進通過」へのシーン遷移は不可能であるため、現在の運転シーンが「交差点直進通過」であるとは判定されない。このような場合には、その前に「現在の運転シーン」として判定された「右左折」が、現在の運転シーンであると判定される。
【0050】
なお、ここでは、「交差点までの距離D=0」であれば交差点内であるとしているが、交差点内でに移動距離を考慮にいれて運転シーンを判定することも可能である。例えば、交差点に入ってからの移動距離(m)に応じて「信号待ち先頭付近」の運転シーンと「交差点内停止」の運転シーンとを判別することが可能になる。
【0051】
同様に、車線変更を行った後に、ハンドルを戻して舵角を小さくなると、「車速V>0」「舵角|θ|≦10」「車線数N≧2」という条件を満たすことになり、遷移可否情報を参照しなければ「もうすぐ左へ/もうすぐ右へ(=本来は、車線変更前/右左折前に選択されるべき運転シーン)」が現在の運転シーンとして判定されることになる。しかし、図4に示すように「車線変更」から「もうすぐ左へ」や「もうすぐ右へ」へのシーン遷移は不可能であるため、現在の運転シーンが「もうすぐ左へ/もうすぐ右へ」であるとは判定されない。このような場合、その前に「現在の運転シーン」として判定された「車線変更」が、現在の運転シーンであると判定される。
【0052】
なお、「車線変更」や「右左折」に対応付けられる「舵角」の基準値は、図5(a)(b)に示すように、車両の車速が小さいほど大きく、車両の車速が大きいほど小さくなるように設定されてもよい。なお、図5(a)(b)では、|舵角|と車速との関係が一次関数である場合が例示されているが、これはあくまでも一例であり、|舵角|と車速との関係が他の関数(n次関数や三角関数など)であってもよいことは言うまでもない。図2の例では、「右左折」に対応付けられる「舵角」の基準値が、車速によらず一定値(θ≧50)であるが、例えば、車速が小さい(V<20)場合には舵角の基準値を大きく(θ≧60)、車速が大きい(V≧50)場合には舵角の基準値を小さく(θ≧40)してもよい。
【0053】
また、制御部3は、現在の車両情報に基づいて、現在の運転シーンが終了したか否かを判定するシーン終了判定部13を備えており、運転シーン判定部10は、現在の運転シーンが終了したと判定されるまで、前の運転シーンが継続しているとして現在の運転シーンの判定を行う。具体的には、シーン終了判定手段は、「舵角」と「舵角変化率」に基づいて、車線変更の運転シーンが終了したか否かを判定する。例えば、「舵角」が「正(左)→負(右)→正(左)→ゼロ(直進)」と変化し、かつ、「舵角変化率」の絶対値が「正(毎秒0°より大)→ゼロ(毎秒0°)」と変化した場合に、「左車線変更」の運転シーンが終了したと判定する。なお、舵角変化率の代わりに、ヨーレート(ヨー角変化率:ラジアン/秒)を利用してもよい。ヨーレートの情報は、車両に搭載されたヨーレートセンサ(図示せず)から取得することが可能である。
【0054】
なお、この場合の「舵角」や「舵角変化率」の基準値は、図5(b)(c)に示すように、車両の車速が小さいほど大きく、車両の車速が大きいほど小さくなるように設定されてもよい。例えば、車速が小さい(V<20)場合には舵角の基準値を大きく(θ≧60)、車速が大きい(V≧50)場合には舵角の基準値を小さく(θ≧40)してもよい。同様に、例えば、車速が小さい(V<20)場合には舵角変化率の基準値を大きく(例えば、毎秒10°)、車速が大きい(V≧50)場合には舵角変化率の基準値を小さく(例えば、毎秒0°)してもよい。なお、図5(c)では、|舵角変化率|と車速との関係が一次関数である場合が例示されているが、これはあくまでも一例であり、|舵角変化率|と車速との関係が他の関数(n次関数や三角関数など)であってよいことは言うまでもない。
【0055】
また、運転シーン判定部10は、第1の運転シーンから第2の運転シーンへシーン遷移した後に、第2の運転シーンから第1の運転シーンへ戻る場合に、第1の運転シーンと対応付けられている車両情報または道路情報(第1の運転シーンへ遷移する条件)を変更して、第1の運転シーンへ戻るのを困難にするヒステリシス制御を行う。
【0056】
例えば、「低速走行」の運転シーン(第1の運転シーン)から「加速」の運転シーン(第2の運転シーン)へ遷移するときには、「加速」の運転シーンへ遷移する条件が「加速度≧3m/秒2」であるとする。その後、「加速」の運転シーンから「低速走行」の運転シーンへ戻るときには、ヒステリシス制御によって、「低速走行」の運転シーンへ遷移する条件が「加速度<2m/秒2」に変更される。さらに、その後、「低速走行」の運転シーンから「加速」の運転シーンへ遷移するときには、ヒステリシス制御によって、「加速」の運転シーンへ遷移する条件が「加速度≧4m/秒2」に変更される。
【0057】
なお、ここでは、一次元のヒステリシス制御の場合(変更する条件(パラメータ)が一つの場合)を例示したが、多次元のヒステリシス制御が行われてよいことは言うまでもない。また、このヒステリシス制御では、パラメータ(第1の運転シーンへ遷移する条件)の変更のほかに、更なる条件を追加することによって、第1の運転シーンへ戻るのを困難にすることも可能である。
【0058】
以上のように構成された本実施の形態の運転シーン判定装置1について、図6のフロー図を参照してその動作を説明する。
【0059】
本実施の形態の運転シーン判定装置1では、定期的に(例えば毎秒1回)運転シーンの判定が行われる。そして、運転シーンの判定が行われるときには、図6に示すように、まず、情報取得部2によって現在の車両情報と道路情報が取得される(S1、S2)。そして、現在の運転シーン判定の前処理として、前回の運転シーン判定で求めた運転シーン(車線変更など)が終了したか否かの判定を行い(S3)、その運転シーンが終了していた場合には、現在の運転シーン判定を開始する(S4)。
【0060】
現在の運転シーン判定では、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンが判定される。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に(S5)、その運転シーンが現在の運転シーンであると判定される(S6)。
【0061】
このような本発明の実施の形態の運転シーン判定装置1によれば、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができる。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定される。言い換えれば、現在の車両情報および現在の道路情報に対応付けられた運転シーンであっても、前の運転シーンから遷移可能でない場合には、現在の運転シーンでないと判定される。したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0062】
また、本実施の形態では、運転シーンごとに用意された複数の運転シーン対応情報の中から選択した運転シーン対応情報(現在の運転シーンに応じた運転シーン対応情報)を用いることによって、現在の運転シーンの判定を適切に行うことができる。
【0063】
この場合、運転シーンごとに用意された複数の運転シーン対応情報では、運転シーンに対応づけられる車両情報や道路情報が異なっているともいえる。そして、ある運転シーンの運転シーン対応情報と他の運転シーンの運転シーン対応情報とで異なるのは、相互に遷移できる運転シーンに対応づけられる車両情報や道路情報の設定値である。
【0064】
例えば、「安定走行」と「高速走行」とは相互に遷移できる運転シーンであるが、「安定走行」の運転シーンの運転シーン対応情報では、「高速走行」の運転シーンへ遷移するための車速の条件が「時速60km以上」に設定されるのに対して、「高速走行」の運転シーンの運転シーン対応情報では、「安定走行」の運転シーンへ遷移するための車速の条件が「時速50km以下」に設定される。これにより、時速60km近傍の車速で車両が走行している場合(時には時速61kmで走行し、時には時速59kmで走行するような場合)には、時速60kmを上回った時点(時速61kmになった時点)で運転シーンが「安定走行」から「高速走行」へ遷移した後は、時速60kmを少し下回った程度(時速59kmになった程度)では「高速走行」から「安定走行」へ運転シーンが遷移しない。このようにして、運転シーンの遷移が頻繁に発生するのを抑えることができる。
【0065】
また、本実施の形態では、「車線変更」または「右左折」の運転シーンに対応付けられる「舵角」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」または「右左折」の運転シーンの判定を、その車両の車速に応じて適切に行うことができる。
【0066】
また、本実施の形態では、現在の車両情報に基づいて、現在の運転シーンが終了したか否かが判定され、その運転シーンが終了したと判定されるまでは、前の運転シーンが継続しているとして現在の運転シーンの判定が行われる。したがって、前の運転シーンが終了しないうちは(前の運転シーンが継続しているときには)、車両情報や道路情報が別の運転シーンに対応するものであったとしても、その運転シーンが継続していると判定される。このようにして、運転シーンの継続中に他の運転シーンへ遷移するという誤判定を抑えることができる。
【0067】
この場合、「舵角」および「舵角変化率」に基づいて、「車線変更」の運転シーンが終了したか否かを適切に判定することができる。例えば、「舵角」が「正(左)→負(右)→正(左)→ゼロ(直進)」と変化し、かつ、「舵角変化率」の絶対値が「正(毎秒0°より大)→ゼロ(毎秒0°)」と変化した場合に、「左車線変更」の運転シーンが終了したと判定される。この場合、「舵角」および「舵角変化率」の車両情報が、車両の「車速」に応じて適切に設定される。具体的には、「車速」が小さいほど「舵角」が大きくなり、「車速」が大きいほど「舵角」が小さくなるように設定される。したがって、「車線変更」の運転シーンの終了判定を、その車両の車速に応じて適切に行うことができる。
【0068】
また、本実施の形態では、第1の運転シーン(例えば「低速走行」の運転シーン)から第2の運転シーン(例えば「加速」の運転シーン)へシーン遷移した後に、第2の運転シーンから第1の運転シーンへ戻る場合には、第1の運転シーンと対応付けられている車両情報または道路情報(例えば「加速度」の情報)を変更するヒステリシス制御が行われ、第1の運転シーンへ戻りにくくなる。このようなヒステリシス制御によって、運転シーンの遷移が頻繁に発生するのを抑えることができる。
【0069】
(第2の実施の形態)
次に、本発明の第2の実施の形態のワークロード推定装置20について説明する。本実施の形態のワークロード推定装置20は、第1の実施の形態の運転シーン判定装置1にワークロード推定機能が付加された装置である。したがって、ここでは、第2の実施の形態のワークロード推定装置20が、第1の実施の形態の運転シーン判定装置1と相違する点を中心に説明する。ここで特に言及しない限り、本実施の形態の構成および動作は、第1の実施の形態と同様である。
【0070】
図7は、本実施の形態のワークロード推定装置20の構成を示すブロック図である。図7に示すように、ワークロード推定装置20は、第1の実施の形態の運転シーン判定装置1の構成に加えて、車両の運転に関連するワークロード値を算出するための定量化モデルが記憶されているモデルDB21(データベース)を備えている。定量化モデルは、ワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データを用いて、車両運転中のユーザの寄与行動からワークロード値を算出するためのモデルである。なお、定量化モデルや正解データの詳しい内容については、図面を用いて後述する。
【0071】
このワークロード推定装置20の情報取得部2は、車両センサ7や車載カメラ8(視線カメラを含む)や生体センサ22から、車両運転中のユーザの寄与行動に関するデータを取得する機能も備えている。よって、この情報取得部2は、本発明のデータ取得部にも相当する。そして、ワークロード推定装置20は、定量化モデルを用いて、車両運転中のユーザの寄与行動のデータからユーザのワークロード値を推定するワークロード推定部23を備えている。
【0072】
(ワークロードの種類)
ここで、車両運転中のユーザのワークロードの種類と、そのワークロードの寄与データについて説明する。車両運転中のユーザのワークロードには、車両を運転するときのユーザの運転操作に起因する運転ワークロードが含まれる。例えば、情報取得部2は、運転ワークロードの寄与行動に関するデータ(例えば、車両運転中の舵角データ、車速データ、車間距離データ、アクセル開度率データ、ブレーキ信号データなど)を、車両センサ7から取得する。
【0073】
また、車両運転中のユーザのワークロードには、車両に備えられた機器を操作するときのユーザの機器操作に起因する機器操作ワークロードが含まれる。情報取得部2は、機器操作ワークロードの寄与行動に関するデータ(例えば、車両運転中のナビ操作データ、オーディオ操作データ、エアコン操作データ、窓開閉操作データなど)を、車両センサ7から取得する。
【0074】
また、車両運転中のユーザのワークロードには、車両を運転するときのユーザの聴覚的動作に起因する聴覚的ワークロードが含まれている。情報取得部2は、聴覚的ワークロードの寄与行動に関するデータ(例えば、車両運転中の経路案内やオーディオ再生などに含まれる音声情報データや音楽情報データなど)を、車両センサ7から取得する。
【0075】
また、車両運転中のユーザのワークロードには、車両を運転するときのユーザの視覚的動作に起因する視覚的ワークロードが含まれる。情報取得部2は、視覚的ワークロードの寄与行動に関するデータ(例えば、車両運転中のユーザの視点移動速度データや視点座標データなど)を、視線カメラ4から取得する。
【0076】
また、車両運転中のユーザのワークロードには、車両を運転するときのユーザの心理状態に起因する内因的ワークロードが含まれる。情報取得部2は、内因的ワークロードの寄与行動に関するデータ(例えば、車両運転中のユーザの心拍数データ、血圧データ、呼吸回数データなど)を、生体センサ22から取得する。
【0077】
また、車両運転中のユーザのワークロードには、車両の運転シーンに起因する外因的ワークロードが含まれる。情報取得部2は、外因的ワークロードの寄与行動に関するデータ(例えば、現在の運転シーン)を、運転シーン判定部10から取得する。
【0078】
そして、ワークロード推定部23は、これらの複数のワークロード(運転ワークロード、機器操作ワークロード、聴覚的ワークロード、視覚的ワークロード、内因的ワークロード、外因的ワークロード)を要素として、車両運転中のユーザのワークロード値を推定する。具体的には、ワークロード推定部23は、モデルDB21に記憶されている定量化モデルを用いて、情報取得部2が取得した車両運転中のユーザの寄与行動のデータから、複数のワークロードごとのワークロード値を推定し、それらを要素として車両運転中のユーザのワークロード値を推定する。
【0079】
(定量化モデルを用いたワークロードの推定)
ここで、本実施の形態の特徴であるワークロードの推定について、図面を用いて説明する。図8は、本実施の形態におけるワークロードの推定の一例を示す説明図である。ここでは、図8に示すように、定量化モデルの一つとして定式化モデルを用いて、複数のワークロードごとにワークロード値の推定を行う場合を例示して説明する。この定式化には、例えば、線形重回帰分析、主成分分析、因子分析などの統計的手法が用いられる。
【0080】
図8に示すように、運転ワークロードに寄与するデータ(運転WL寄与データ)には、車両運転中の舵角d1(度)、車速d2(km/h)、車間距離d3(m)、アクセル開度率d4(%)、ブレーキ信号d5(ON:1、OFF:0)のデータが含まれる。これらのデータd1〜d5と正解データ(後述する)との関係を統計的手法などで導くことにより、下記の式1のように運転ワークロード(DWL)の定式化が行われる。
DWL=α(n)×d1/360+β(n)×d2/100+γ(n)/d3
+δ(n)×d4/100+ε×d5 (式1)
【0081】
ここで、α、β、γ、δ、εは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。この慣れ係数は、ユーザの走行履歴に基づいて定められる係数である。重み付け係数αを例示して説明すると、ユーザが初めて車両走行をした場合(n=1)の重み付け係数は、α(1)となり、ユーザが二度目に車両走行した場合(n=2)の重み付け係数は、α(2)となる。つまり、この定式化モデルは、ユーザの車両運転に関する慣れを考慮した重み付け処理がなされているともいえる。
【0082】
また、機器操作ワークロードに寄与するデータ(機器操作WL寄与データ)には、車両運転中のナビ操作o1(ハードウェアボタン操作:A1、タッチパネル操作:A2など)、オーディオ操作o2(スキップボタン操作:A3、ボリューム操作:A4など)、エアコン操作o3(操作あり:1、操作なし:0)、窓開閉操作o4(操作あり:1、操作なし:0)のデータが含まれる。これらのデータo1〜o4と正解データとの関係を統計的手法などで導くことにより、下記の式2のように機器操作ワークロード(OWL)の定式化が行われる。
OWL=α(n)×o1+β(n)×o2
+γ(n)×o3+δ(n)×o4 (式2)
なお、A1〜A4は、それぞれ所定の定数である。また、α、β、γ、δは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0083】
また、聴覚的ワークロードに寄与するデータ(聴覚的WL寄与データ)には、車両運転中の経路案内やオーディオ再生などに含まれる音声情報a1(経路案内:B1、施設情報案内:B2、電話:B3など)、音楽情報a2(クラシック:B4、ロック:B5、お気に入りの曲:B6など)のデータが含まれる。これらのデータa1、a2と正解データとの関係を統計的手法などで導くことにより、下記の式3のように聴覚的ワークロード(AWL)の定式化が行われる。
AWL=α(n)×a1+β(n)×a2 (式3)
なお、B1〜B6は、それぞれ所定の定数である。また、α、βは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0084】
また、視覚的ワークロードに寄与するデータ(視覚的WL寄与データ)には、車両運転中の視点移動速度v1(mm/秒)、視点座標v2(ルームミラー:C1、サイドミラー:C2、ナビ:C3など)のデータが含まれる。これらのデータv1、v2と正解データとの関係を統計的手法などで導くことにより、下記の式4のように視覚的ワークロード(VWL)の定式化が行われる。
VWL=α(n)×v1+β(n)×v2 (式4)
なお、C1〜C6は、それぞれ所定の定数である。また、α、βは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0085】
また、内因的ワークロードに寄与するデータ(内因的WL寄与データ)には、車両運転中の心拍数i1(回/分)、血圧i2(mmHg)、呼吸回数i3(回/分)のデータが含まれる。これらのデータi1〜i3と正解データとの関係を統計的手法などで導くことにより、下記の式5のように内因的ワークロード(IWL)の定式化が行われる。
IWL=α(n)×i1+β(n)×i2+γ(n)×i3 (式5)
なお、α、β、γは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0086】
また、外因的ワークロードに寄与するデータ(外因的WL寄与データ)には、現在の運転シーンのデータが含まれる。これらのデータs1と正解データとの関係を統計的手法などで導くことにより、下記の式6のように外因的ワークロード(SWL)の定式化が行われる。
SWL=α(n)×f(s1) (式6)
なお、fは、運転シーンを数値化する関数(入力値である運転シーンごとに所定の出力値が設定されていてもよい)であり、αは、重み付け係数であり、nは、ユーザの車両運転に関する慣れを考慮した慣れ係数である。
【0087】
以上では、定式化モデルを用いたワークロードの推定の例について説明したが、本発明の範囲は、これに限定されるものではない。例えば、図9に示すように、ワークロードの推定には、確率推論モデルが用いられてもよい。
【0088】
確率推論モデルとしては、例えば、ベイジアンネットワークやニューラルネットワーク等が用いられる。運転シーンのデータは、各ワークロード値を推定するときに用いられてもよい。例えば、運転ワークロードを例示して具体的に説明すると、運転ワークロードに寄与するデータ(運転WL寄与データ)である舵角d1(度)、車速d2(km/h)、車間距離d3(m)、アクセル開度率d4(%)、ブレーキ信号d5(ON:1、OFF:0)、運転シーンd6のデータを入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として運転ワークロード(DWL)のワークロード値の推定が行われる。
【0089】
同様に、機器操作ワークロードについては、上述の機器操作WL寄与データ(o1〜o4)および運転シーンのデータo5を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として機器操作ワークロード(OWL)のワークロード値の推定が行われる。
【0090】
また、聴覚的ワークロードについては、上述の聴覚的WL寄与データ(a1、a2)および運転シーンのデータa3を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として聴覚的ワークロード(AWL)のワークロード値の推定が行われる。
【0091】
また、視覚的ワークロードについては、上述の視覚的WL寄与データ(v1、v2)および運転シーンのデータv3を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として視覚的ワークロード(VWL)のワークロード値の推定が行われる。
【0092】
また、内因的ワークロードについては、上述の内因的WL寄与データ(i1〜i3)および運転シーンのデータi4を入力として、ベイジアンネットワークやニューラルネットワークの確率モデルを構築し、その推論結果として内因的ワークロード(IWL)のワークロード値の推定が行われる。
【0093】
なお、定量化モデル(定式化モデルや確率推論モデル)を構築する際には、正解データを利用するとともに、ユーザのプロフィール(年齢、性別、運転暦)などを考慮してもよい。
【0094】
(正解データ)
つぎに、定量化モデルの構築に用いられる正解データについて説明する。本実施の形態では、二種類の正解データ(生体信号指標と主観評価指標)を利用して、定量化モデルの構築が行われる。なお、定量化モデルの構築は、各ワークロードのモデル化(定量化)ということもできる。
【0095】
ここでは、生体信号指標として、瞳孔反応を例示して説明するが、本発明の範囲はこれに限定されない。本発明の生体信号指標には、瞳孔反応のほかに、心拍数変動、呼吸数変動、生体電位変動などが含まれる。
【0096】
一般に、瞳孔が散瞳(瞳孔半径が大きくなる)している場合には、交感神経が刺激され、ユーザは興奮している。逆に、瞳孔が縮瞳(瞳孔半径が小さくなる)している場合には、副交感神経が刺激され、ユーザはリラックスしている。そして、瞳孔反応(瞳孔半径変化速度)が大きいほど、ユーザに加わるワークロードは高く、瞳孔反応が小さいほど、ユーザに加わるワークロードは低い。
【0097】
本実施の形態では、所定の実験コースをユーザが走行したときの車両運転中のユーザの瞳孔反応の時系列のデータを取得し、車両の運転との対応を解析する。例えば、出発時には、瞳孔反応が小さく、左折や右折、すれ違いや追越しなどを行うときに、瞳孔反応が大きくなっている。このような瞳孔反応の正解データから、各ワークロードの寄与行動を行っている部分を抽出して、その部分の瞳孔反応の大きさや変化率等に基づいて、各ワークロードの定式化が行われる。
【0098】
ここで、運転ワークロードの定式化を例にして説明する。例えば、瞳孔反応の正解データから、運転ワークロードの寄与行動を行っている部分(例えば右折の部分)を抽出して、そのときの運転WL寄与データ(舵角信号、車速、車間距離、アクセル開度率、ブレーキ信号のデータ)との関係を統計的手法で導いて、運転ワークロードの定式化が行われる。つまり、この瞳孔反応の正解データに基づいて、運転WL寄与データから運転ワークロードのワークロード値を算出するための定式化モデル(上記の式1)が求められる。
【0099】
以上、瞳孔反応の正解データから運転ワークロードの定式化を行う例について説明した。なお、ここでは説明を省略するが、これと同様にして、機器操作ワークロード、聴覚的ワークロード、視覚的ワークロード、内因的ワークロードの定式化が行われる。
【0100】
つぎに、主観評価指標の正解データについて説明する。ここでは、主観評価指標として、従前のNASA−TLXを例示して説明するが、本発明の範囲はこれに限定されない。例えば、従前のNASA−TLXの代わりに、映像を見ながら事後的にPC上で主観評価を行う連続的なNASA−TLX(時系列のNASA−TLX)を用いてもよい。本発明の主観評価指標には、NASA−TLXのほかに、SWAT、MCHなどが含まれる。
【0101】
NASA−TLXは、ワークロードをユーザが主観的に定量化する指標であり、一般に、その値が大きいほど、ユーザのワークロードが高く、その値が小さいほど、ユーザのワークロードは低い。
【0102】
本実施の形態では、所定の実験コースをユーザが走行したときの車両運転中のユーザのNASA−TLXの時系列のデータを取得し、車両の運転との対応を解析する。例えば、出発時や左折時や右折時に、NASA−TLXの値が大きく、直進時に、NASA−TLXの値が小さくなっている。このようなNASA−TLXの正解データから、各ワークロードの寄与行動を行っている部分を抽出して、その部分のNASA−TLXの値の大きさや変化率等に基づいて、各ワークロードの定式化が行われる。
【0103】
ここで、運転ワークロードの定式化を例にして説明する。例えば、NASA−TLXの正解データから、運転ワークロードの寄与行動を行っている部分(例えば右折の部分)を抽出して、そのときの運転WL寄与データ(舵角信号、車速、車間距離、アクセル開度率、ブレーキ信号のデータ)との関係を統計的手法で導いて、運転ワークロードの定式化が行われる。つまり、このNASA−TLXの正解データに基づいて、運転WL寄与データから運転ワークロードのワークロード値を算出するための定式化モデル(上記の式1)が求められる。
【0104】
以上、NASA−TLXの正解データから運転ワークロードの定式化を行う例について説明した。なお、ここでは説明を省略するが、これと同様にして、機器操作ワークロード、聴覚的ワークロード、視覚的ワークロード、内因的ワークロードの定式化が行われる。
【0105】
以上のように構成されたワークロード推定装置20について、図10のフロー図を用いてその動作を説明する。
【0106】
本実施の形態のワークロード推定装置20では、現在の運転シーンの判定を行い、その現在の運転シーンを利用してワークロードの推定が行われる。すなわち、第1の実施の形態と同様に、まず、情報取得部2によって現在の車両情報と道路情報が取得される(S1、S2)。そして、現在の運転シーン判定の前処理として、前回の運転シーン判定で求めた運転シーン(車線変更など)が終了したか否かの判定を行い(S3)、その運転シーンが終了していた場合には、現在の運転シーン判定を開始する(S4)。
【0107】
現在の運転シーン判定では、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンが判定される。すなわち、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に(S5)、その運転シーンが現在の運転シーンであると判定される(S6)。そして、この現在の運転シーンを用いてワークロードの推定が行われる(S7)。
【0108】
このような本発明の第2の実施の形態の運転シーン判定装置1によっても、第1の実施の形態と同様の作用効果が奏される。
【0109】
すなわち、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0110】
その上、本実施の形態では、このように判定された現在の運転シーンに基づいて、車両運転中のユーザのワークロード値を定量化モデルを用いて高精度で推定することができる。
【0111】
(第3の実施の形態)
次に、本発明の第3の実施の形態のサービス提供装置30について説明する。本実施の形態のサービス提供装置30は、第1の実施の形態の運転シーン判定装置1にサービス提供機能が付加された装置である。したがって、ここでは、第3の実施の形態のサービス提供装置30が、第1の実施の形態の運転シーン判定装置1と相違する点を中心に説明する。ここで特に言及しない限り、本実施の形態の構成および動作は、第1の実施の形態と同様である。
【0112】
図11は、本実施の形態におけるサービス提供装置30の構成を示すブロック図である。図11に示すように、ワークロード推定装置20は、第1の実施の形態の運転シーン判定装置1の構成に加えて、現在の運転シーンに応じたサービスを提供するサービス提供部31を備えている。
【0113】
例えば、このサービス提供部31は、現在の運転シーンに応じたサービスとして、ドライバーや同乗者に対して、運転シーン名を通知(画面への表示、音声での読み上げなど)するサービスを実行する。このような運転シーン名の通知サービスは、ネットワーク経由で社外の人に対して実行してもよい。また、このサービス提供部31は、各運転シーンに割り当てられたサービスを実行してもよい。例えば、特定のシーン(例えば、右左折や車線変更など)で、オーディオのボリュームを下げるサービスや、警告音を鳴らすサービスなどを実行してもよい。
【0114】
このような本発明の第3の実施の形態のサービス提供装置によっても、第1の実施の形態と同様の作用効果が奏される。
【0115】
すなわち、運転シーン対応情報を用いるだけでなく、遷移可否情報を用いることによって、現在の車両情報および現在の道路情報から現在の運転シーンを正しく判定することができ、したがって、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができる。
【0116】
その上、本実施の形態では、このように判定された現在の運転シーンに基づいて、適切にサービスを提供することができる。
【0117】
以上、本発明の実施の形態を例示により説明したが、本発明の範囲はこれらに限定されるものではなく、請求項に記載された範囲内において目的に応じて変更・変形することが可能である。
【産業上の利用可能性】
【0118】
以上のように、本発明にかかる運転シーン判定装置は、運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることができるという効果を有し、例えばカーナビゲーション装置等に適用され、有用である。
【符号の説明】
【0119】
1 運転シーン判定装置
2 情報取得部
3 制御部
4 車両情報取得部
5 道路情報取得部
6 GPS装置
7 車両センサ
8 車載カメラ
9 道路情報DB
10 運転シーン判定部
11 運転シーンDB
12 遷移可否DB
13 シーン終了判定部
20 ワークロード推定装置
21 モデルDB
22 生体センサ
23 ワークロード推定部
30 サービス提供装置
【特許請求の範囲】
【請求項1】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、
現在の車両情報および現在の道路情報を取得する情報取得手段と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する運転シーン判定手段と、
を備え、
前記運転シーン判定手段は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定することを特徴とする運転シーン判定装置。
【請求項2】
前記運転シーン記憶部は、前記現在の運転シーンごとに用意された複数の前記運転シーン対応情報を記憶し、
前記運転シーン判定手段は、前記複数の運転シーン対応情報の中から前記現在の運転シーンに応じた運転シーン対応情報を選択して、前記現在の運転シーンの判定に用いる、請求項1に記載の運転シーン判定装置。
【請求項3】
前記運転シーンには、車線変更または右左折が含まれており、
前記車線変更または右左折に対応付けられる前記車両情報には、舵角が含まれており、
前記舵角の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さい、請求項1または請求項2に記載の運転シーン判定装置。
【請求項4】
前記現在の車両情報に基づいて、前記現在の運転シーンが終了したか否かを判定するシーン終了判定手段を備え、
前記運転シーン判定手段は、前記現在の運転シーンが終了したと判定されるまで、前の運転シーンが継続しているとして前記現在の運転シーンの判定を行う、請求項1〜請求項3のいずれかに記載の運転シーン判定装置。
【請求項5】
前記シーン終了判定手段は、前記車両情報に含まれる舵角および舵角変化率に基づいて、車線変更の運転シーンが終了したか否かを判定し、
前記舵角および前記舵角変化率の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さい、請求項4に記載の運転シーン判定装置。
【請求項6】
前記運転シーン判定手段は、第1の運転シーンから第2の運転シーンへシーン遷移した後に前記第2の運転シーンから前記第1の運転シーンへ戻る場合に、前記第1の運転シーンと対応付けられている前記車両情報または前記道路情報を変更して、前記第1の運転シーンへ戻るのを困難にするヒステリシス制御を行う、請求項1〜請求項5のいずれかに記載の運転シーン判定装置。
【請求項7】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、
現在の車両情報および現在の道路情報を取得し、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する方法において、
前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定することを特徴とする運転シーン判定方法。
【請求項8】
メモリに記憶されている、
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、
を用いて、
コンピュータに、
現在の車両情報および現在の道路情報を取得する処理と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する処理と、
を実行させるプログラムにおいて、
前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定することを特徴とする運転シーン判定プログラム。
【請求項9】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、
現在の車両情報および現在の道路情報を取得する情報取得手段と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、
前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されているモデル記憶手段と、
車両運転中のユーザから前記寄与行動に関するデータを取得するデータ取得手段と、
前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定するワークロード推定手段と、
を備え、
前記ワークロード推定手段は、前記車両運転中のユーザの寄与行動として、前記運転シーン判定手段によって判定された前記現在の運転シーンを用いることを特徴とするワークロード推定装置。
【請求項10】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、
前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されており、
現在の車両情報および現在の道路情報を取得し、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、
車両運転中のユーザから前記寄与行動に関するデータを取得し、
前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する方法において、
前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定によって得られた前記現在の運転シーンを用いることを特徴とするワークロード推定方法。
【請求項11】
メモリに記憶されている、
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、
前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルと、
を用いて、
コンピュータに、
現在の車両情報および現在の道路情報を取得する処理と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、
車両運転中のユーザから前記寄与行動に関するデータを取得する処理と、
前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する処理と、
を実行させるプログラムにおいて、
前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定する処理によって得られた前記現在の運転シーンを用いることを特徴とするワークロード推定プログラム。
【請求項12】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、
現在の車両情報および現在の道路情報を取得する情報取得手段と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、
判定された前記現在の運転シーンに応じたサービスを提供するサービス提供手段と、
を備えたことを特徴とするサービス提供装置。
【請求項13】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、
現在の車両情報および現在の道路情報を取得し、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、
判定された前記現在の運転シーンに応じたサービスを提供することを特徴とするサービス提供方法。
【請求項14】
メモリに記憶されている、
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、
を用いて、
コンピュータに、
現在の車両情報および現在の道路情報を取得する処理と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、
判定された前記現在の運転シーンに応じたサービスを提供する処理と、
を実行させることを特徴とするサービス提供プログラム。
【請求項1】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、
現在の車両情報および現在の道路情報を取得する情報取得手段と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する運転シーン判定手段と、
を備え、
前記運転シーン判定手段は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定することを特徴とする運転シーン判定装置。
【請求項2】
前記運転シーン記憶部は、前記現在の運転シーンごとに用意された複数の前記運転シーン対応情報を記憶し、
前記運転シーン判定手段は、前記複数の運転シーン対応情報の中から前記現在の運転シーンに応じた運転シーン対応情報を選択して、前記現在の運転シーンの判定に用いる、請求項1に記載の運転シーン判定装置。
【請求項3】
前記運転シーンには、車線変更または右左折が含まれており、
前記車線変更または右左折に対応付けられる前記車両情報には、舵角が含まれており、
前記舵角の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さい、請求項1または請求項2に記載の運転シーン判定装置。
【請求項4】
前記現在の車両情報に基づいて、前記現在の運転シーンが終了したか否かを判定するシーン終了判定手段を備え、
前記運転シーン判定手段は、前記現在の運転シーンが終了したと判定されるまで、前の運転シーンが継続しているとして前記現在の運転シーンの判定を行う、請求項1〜請求項3のいずれかに記載の運転シーン判定装置。
【請求項5】
前記シーン終了判定手段は、前記車両情報に含まれる舵角および舵角変化率に基づいて、車線変更の運転シーンが終了したか否かを判定し、
前記舵角および前記舵角変化率の設定値は、前記車両の車速が小さいほど大きく、前記車両の車速が大きいほど小さい、請求項4に記載の運転シーン判定装置。
【請求項6】
前記運転シーン判定手段は、第1の運転シーンから第2の運転シーンへシーン遷移した後に前記第2の運転シーンから前記第1の運転シーンへ戻る場合に、前記第1の運転シーンと対応付けられている前記車両情報または前記道路情報を変更して、前記第1の運転シーンへ戻るのを困難にするヒステリシス制御を行う、請求項1〜請求項5のいずれかに記載の運転シーン判定装置。
【請求項7】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、
現在の車両情報および現在の道路情報を取得し、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する方法において、
前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定することを特徴とする運転シーン判定方法。
【請求項8】
メモリに記憶されている、
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、
を用いて、
コンピュータに、
現在の車両情報および現在の道路情報を取得する処理と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する処理と、
を実行させるプログラムにおいて、
前記運転シーンの判定は、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定することを特徴とする運転シーン判定プログラム。
【請求項9】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、
現在の車両情報および現在の道路情報を取得する情報取得手段と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、
前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されているモデル記憶手段と、
車両運転中のユーザから前記寄与行動に関するデータを取得するデータ取得手段と、
前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定するワークロード推定手段と、
を備え、
前記ワークロード推定手段は、前記車両運転中のユーザの寄与行動として、前記運転シーン判定手段によって判定された前記現在の運転シーンを用いることを特徴とするワークロード推定装置。
【請求項10】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、
前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルが記憶されており、
現在の車両情報および現在の道路情報を取得し、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、
車両運転中のユーザから前記寄与行動に関するデータを取得し、
前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する方法において、
前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定によって得られた前記現在の運転シーンを用いることを特徴とするワークロード推定方法。
【請求項11】
メモリに記憶されている、
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、
前記車両の運転に関連するワークロードに寄与するユーザの寄与行動とワークロード値との相関関係が記録された正解データに基づいて、車両運転中のユーザの寄与行動から前記ワークロード値を算出するための定量化モデルと、
を用いて、
コンピュータに、
現在の車両情報および現在の道路情報を取得する処理と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、
車両運転中のユーザから前記寄与行動に関するデータを取得する処理と、
前記定量化モデルを用いて、前記車両運転中のユーザの寄与行動のデータから前記ユーザのワークロード値を推定する処理と、
を実行させるプログラムにおいて、
前記ワークロード値の推定では、前記車両運転中のユーザの寄与行動として、前記判定する処理によって得られた前記現在の運転シーンを用いることを特徴とするワークロード推定プログラム。
【請求項12】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーン記憶部と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶するシーン遷移可否記憶部と、
現在の車両情報および現在の道路情報を取得する情報取得手段と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定する手段であって、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する運転シーン判定手段と、
判定された前記現在の運転シーンに応じたサービスを提供するサービス提供手段と、
を備えたことを特徴とするサービス提供装置。
【請求項13】
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報が記憶されており、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報が記憶されており、
現在の車両情報および現在の道路情報を取得し、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定し、
判定された前記現在の運転シーンに応じたサービスを提供することを特徴とするサービス提供方法。
【請求項14】
メモリに記憶されている、
ユーザが運転している車両に関する車両情報と前記車両が通行している道路に関する道路情報に前記車両の運転シーンが対応付けられた運転シーン対応情報と、
複数の前記運転シーンについて、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報と、
を用いて、
コンピュータに、
現在の車両情報および現在の道路情報を取得する処理と、
前記運転シーン対応情報および前記遷移可否情報に基づいて、前記現在の車両情報および前記現在の道路情報から現在の運転シーンを判定するときに、前記現在の車両情報および前記現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、前記現在の運転シーンであると判定する処理と、
判定された前記現在の運転シーンに応じたサービスを提供する処理と、
を実行させることを特徴とするサービス提供プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−129010(P2011−129010A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−288739(P2009−288739)
【出願日】平成21年12月21日(2009.12.21)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月21日(2009.12.21)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
[ Back to top ]