
運転パターン設定装置

【課題】車両用自動運転システムにおいて計測対象となる複数の対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンを迅速に作成する。
【解決手段】受付手段152により対象変速が受け付けられ、プロット手段154により変速線上における対象変速の位置が決められ、変速間所要時間算出手段158により変速線上の対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間が算出され、合計時間算出手段160により対象変速を何れも含む対象変速の順列で設定された運転パターンDP毎に所要時間を加算した合計所要時間が算出され、運転パターン選択手段162により合計所要時間が最短となる運転パターンDPが最適運転パターンDPBとして選択されるので、最適運転パターンDPBが適切且つ迅速に作成される。
【解決手段】受付手段152により対象変速が受け付けられ、プロット手段154により変速線上における対象変速の位置が決められ、変速間所要時間算出手段158により変速線上の対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間が算出され、合計時間算出手段160により対象変速を何れも含む対象変速の順列で設定された運転パターンDP毎に所要時間を加算した合計所要時間が算出され、運転パターン選択手段162により合計所要時間が最短となる運転パターンDPが最適運転パターンDPBとして選択されるので、最適運転パターンDPBが適切且つ迅速に作成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用自動変速機を所定の運転パターンに従って作動させる車両用自動運転システムに係り、特に、その運転パターンの設定に関するものである。
【背景技術】
【0002】
制御対象となる装置を所定のパラメータで定められる予め設定された運転パターンに従って作動させてその作動を記録(計測)する自動運転システムにおいては、計測目的に応じた独自の運転パターンが作成される。
【0003】
例えば、特許文献1には、XMLスキーマ文書で定義したXML文書が取り得る構造とXML文書で作成した運転パターンを作成することにより運転パターンの妥当性を自動チェック及びその修正を可能にし、またXMLスキーマ文書から運転パターン解釈プログラムを自動作成しておくことによりXML文書の運転パターンを自動運転システムで利用可能な運転パターンデータに自動展開可能にしたことで、自動運転システムにおける運転パターンの作成・変更が容易になる方法が記載されている。
【0004】
また、特許文献2には、運転パターンが傾斜部分と定常部分の繰り返しになることに着目し、1つの傾斜部分と定常部分とをもつパターンを基本運転パターンとしてその組合せでエンジン自動運転の運転指令データを簡単、短時間で自動的に作成することができる自動運転システムが記載されている。
【0005】
また、特許文献3には、走行パターンデータと変速位置データとを分離記憶し、模擬走行試験対象となる自動車の車種別及びテストモードの組合せに応じてパターンデータを自動作成することにより、対象となる自動車に特有のパターンデータを作成することを容易にし、またパターンデータの追加、変更を容易にすることができる走行テストパターンの作成装置が記載されている。
【0006】
【特許文献1】特開2005−301537号公報
【特許文献2】特開平11−24703号公報
【特許文献3】実開平6−56749号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、変速段が判断される為の複数の変速線を有する予め記憶された関係(変速マップ)に基づいて自動変速が行われる車両用自動変速機の自動運転システムにおいても、計測対象の変速を含む運転パターンを作成する必要がある。
【0008】
例えば、このような車両用自動変速機では、自動変速機の変速に関与する係合装置(クラッチ、ブレーキ)の解放と係合とが制御される変速制御において変速ショックの抑制と変速応答性とが両立するように変速制御にかかわる制御定数(例えば係合装置の係合圧パラメータ(係合圧指令値))を個々に設定する自動変速機適合が行われる。この自動変速機適合に用いるデータを収集する為に、自動運転システムにより、計測対象の変速を順に行わせる為の予め設定された運転パターンに従って自動変速機が作動させられ、それら変速が行われたときの車両状態(例えば変速機出力トルク、加速度)が計測される。この際、変速制御にかかわる制御定数を変更しながら適合作業に必要な膨大なデータを収集することから、自動運転システムにおいては計測対象となる変速の一通りを短時間で実行することができるすなわち短時間でそれら変速時の車両状態を計測することができる効率良い運転パターンを設定することが望まれる。
【0009】
しかしながら、適合作業において要求される計測対象の変速が一様でないことすなわち適合作業において要求される運転パターンが一様でないこと、車両によって例えば変速線が異なるので効率良い運転パターンが異なることなどから、効率良い運転パターンを迅速に作成することは困難である可能性があった。また、特許文献1〜3には、運転パターンの作成自体のし易さを向上させる方法が記載されているものの、車両用自動変速機適合時の自動運転システムにおける運転パターンを作成するものではなく、まして効率良い運転パターンを迅速に作成できるようにするものでもない。尚、上述したような課題は未公知である。
【0010】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、車両用自動運転システムにおいて、予め設定された計測対象の複数の対象変速を順に行わせたときの所要時間が可及的に短くなるような最適運転パターンを迅速に作成することができる運転パターン設定装置を提供することにある。
【課題を解決するための手段】
【0011】
前記目的を達成するための本発明の要旨とするところは、(a) 少なくとも車速関連値を変数として変速段が判断される為の複数の変速線を有する予め記憶された関係に基づいて自動変速が行われる車両用自動変速機を予め設定された計測対象の対象変速を順に行わせる為の予め設定された運転パターンに従って作動させてその変速が行われたときの車両状態を計測する車両用自動運転システムにおける運転パターン設定装置であって、(b) 前記複数の対象変速の何れをも順に行わせたときの所要時間が可及的に短くなるように前記予め記憶された関係におけるその対象変速間の車速関連値方向の距離に基づいて前記運転パターンを作成する運転パターン作成手段を備えることにある。
【発明の効果】
【0012】
このようにすれば、運転パターン作成手段により、計測対象となる複数の対象変速を一通り順に行わせたときの所要時間が可及的に短くなるように前記予め記憶された関係におけるその対象変速間の車速関連値方向の距離に基づいて前記運転パターンが作成されるので、車両用自動運転システムにおいて対象変速の一通りを可及的に短い時間で計測することができるすなわち可及的に短い時間でそれら変速時の車両状態を計測することができる最適運転パターンが迅速に作成される運転パターン設定装置が提供される。
【0013】
ここで、好適には、前記運転パターン作成手段は、(a) 手動操作に応答して前記対象変速を受け付ける受付手段と、(b) 前記変速線上における前記対象変速の位置を決めるプロット手段と、(c) 前記変速線上の位置に基づいて前記予め記憶された関係における前記対象変速間の車速関連値方向の距離を何れをも取得し、その距離に基づいてその対象変速を順に行わせたときのその対象変速間における所要時間を算出する変速間所要時間算出手段と、(d) 前記対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に前記所要時間を加算した合計所要時間を算出する合計時間算出手段と、(e) 前記合計所要時間が最短となる運転パターンを最適運転パターンとして選択する運転パターン選択手段とを、備える。このようにすれば、受付手段により対象変速が受け付けられると、予め記憶された関係における変速線上の対象変速の位置に基づいた対象変速間の車速関連値方向の距離に基づいて変速間所要時間算出手段によりその対象変速を順に行わせたときのその対象変速間における所要時間が算出され、対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に所要時間が加算されて合計時間算出手段により算出された合計所要時間が最短となる運転パターンが運転パターン選択手段により最適運転パターンとして選択されるので、前記最適運転パターンが適切且つ迅速に作成される。
【0014】
また、好適には、前記予め記憶された関係は、前記車速関連値及びスロットル弁開度関連値を変数とするものであり、前記変速間所要時間算出手段は、前記スロットル弁開度関連値に基づく加減速度から前記車速関連値を得る為の時間を求めることで、前記取得した距離に基づいて前記所要時間を算出するものである。このようにすれば、変速間所要時間算出手段により取得された距離に基づく所要時間が適切に算出され、結果として前記最適運転パターンが適切に作成される。
【0015】
また、好適には、前記受付手段は、アップシフトの場合には1→2変速や2→3変速等の変速の種類及び前記スロットル弁開度関連値が設定されることで前記対象変速を受け付け、ダウンシフトの場合には3→2変速や2→1変速等の変速の種類、前記車速関連値、前記スロットル弁開度関連値、前記スロットル弁開度関連値の変化率相当値、及び駆動状態/被駆動状態が設定されることで前記対象変速を受け付ける。このようにすれば、計測対象となる対象変速が運転パターンに適切に反映され、車両用自動運転システムにおいてその運転パターンに従って変速時の車両状態が適切に計測される。
【0016】
また、好適には、前記対象変速の中で前記スロットル弁開度関連値が同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように前記運転パターンにおけるその対象変速の順列を設定させる順列設定手段を更に備える。このようにすれば、スロットル弁開度関連値が同等となるアップシフト群が連続して行われる運転パターンに比較して合計所要時間が長くなるようなアップシフト群が連続しない運転パターンが最適運転パターン候補として初めから作成されないので、前記最適運転パターンが適切且つ一層迅速に作成される。
【0017】
また、好適には、前記運転パターンは、前記車速関連値及びスロットル弁開度関連値が零となる前記予め記憶された関係上の原点を始点として前記対象変速が順に行われるように設定されるものであり、前記スロットル弁開度関連値がより低開度に設定されたアップシフトの対象変速が最初に実行されるように前記運転パターンにおける前記対象変速の順列を設定させる順列設定手段を更に備える。このようにすれば、前記運転パターンが前記予め記憶された関係上の原点を始点として前記対象変速が順に行われる場合には、前記スロットル弁開度関連値がより低開度に設定されたアップシフトの対象変速が最初に行われる運転パターンに比較して合計所要時間が長くなるようなアップシフトの対象変速が最初に行われない運転パターンが最適運転パターン候補として初めから作成されないので、前記最適運転パターンが適切且つ一層迅速に作成される。
【0018】
また、好適には、本発明は、新規すなわち今までにないエンジンと自動変速機との組み合わせを含む車両の開発段階における適合作業に用いられるが、製造段階あるいは車両販売後の定期検査などの段階における適合作業に用いられてもよい。また、車両がシャーシダイナモメータに乗せられ試行されている状態で用いられてもよいし、車両がテストコース等にて運転されている状態で用いられてもよい。また、完成車両に対して用いられてもよいし、エンジンが連結された状態の自動変速機に対して用いられてもよいし、電動モータ等のエンジン代替装置が連結された状態の自動変速機に対して用いられてもよい等、種々の態様が可能である。
【0019】
また、好適には、前記車速関連値とは、例えば車両の速度である車速に1対1に対応する関連値(相当値)であって、車速関連値としてその車速はもちろんのことその他に、例えば変速機の出力回転速度、車軸の回転速度、プロペラシャフトの回転速度、差動歯車装置の出力回転速度などが用いられる。尚、明細書全体を通して、特に区別しない限り車速と表したものは車速関連値をも表すこととする。
【0020】
また、好適には、前記スロットル弁開度関連値とは、例えばスロットル弁の開度を示すスロットル弁開度に1対1に対応する関連値(相当値)であって、スロットル弁開度関連値としてそのスロットル弁開度はもちろんのことその他に、例えばアクセルペダルの操作量(踏込量)を示すアクセル開度、エンジンの吸気管に設けられたチャンバ内或いはシリンダ内へ噴射される燃料の噴射量を示す燃料噴射量、エンジンの吸気管により吸入される吸入空気量などが用いられる。また、このスロットル弁開度関連値は、エンジンの負荷に関連する負荷関連値や運転者が車両に要求する出力要求量と見ることもできる。尚、明細書全体を通して、特に区別しない限りスロットル弁開度と表したものはスロットル弁開度関連値をも表すこととする。
【0021】
また、好適には、前記車両用自動変速機は、複数組の遊星歯車装置の回転要素が係合装置によって選択的に連結されることにより複数のギヤ段(変速段)が択一的に達成される例えば、前進5段、前進6段、前進7段、前進8段等の種々の遊星歯車式多段変速機、常時噛み合う複数対の変速ギヤを2軸間に備えてそれら複数対の変速ギヤのいずれかを同期装置によって択一的に動力伝達状態とする同期噛合型平行2軸式変速機ではあるが、油圧アクチュエータにより駆動される同期装置によって変速段が自動的に切換られることが可能な同期噛合型平行2軸式自動変速機などにより構成される。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例】
【0023】
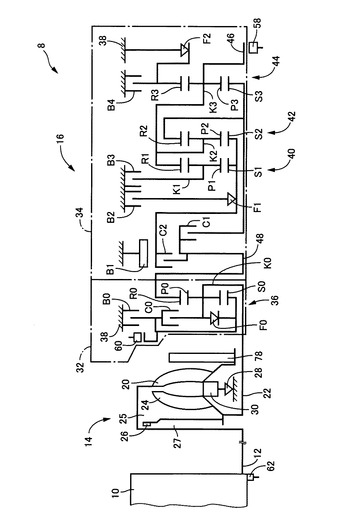
図1は、本発明の適用対象となる車両の動力伝達装置8の構成を説明する骨子図である。図1において、例えば内燃機関にて構成されている走行用駆動力源としてのエンジン10の出力は、クランク軸12、流体伝動装置としてのトルクコンバータ14を経て車両用自動変速機(以下、自動変速機)16に入力され、図示しない差動歯車装置、車軸等を介して駆動輪へ伝達されるようになっている。このようにエンジン10の出力が駆動輪へ伝達されるまでが動力伝達経路であり、その動力伝達経路を構成する動力伝達装置8はトルクコンバータ14、車両用自動変速機16(以下、自動変速機16という)、及び上記差動歯車装置等である。尚、トルクコンバータ14や自動変速機16はその軸心に対して略対称的に構成されており、図1の骨子図においてはその軸心の下半分が省略されている。
【0024】
トルクコンバータ14は、クランク軸12に連結されたポンプ翼車20と、自動変速機16の入力軸22に連結されたタービン翼車24と、それらポンプ翼車20及びタービン翼車24の間を直結するためのロックアップクラッチ26と、一方向クラッチ28によって一方向の回転が阻止されているステータ翼車30とを備えている。ロックアップクラッチ26は、係合側油室25内の油圧と解放側油室27内の油圧との差圧ΔPにより摩擦係合させられる油圧式摩擦クラッチであり、それが完全係合させられることにより、ポンプ翼車20及びタービン翼車24は一体回転させられる。
【0025】
自動変速機16は複数の変速段が選択的に成立させられるすなわち切り換えられる有段変速機であり、ハイ及びローの2段の切り換えを行う第1変速部32と、後進変速段及び前進4段の切り換えが可能な第2変速部34とを備えている。第1変速部32は、サンギヤS0、リングギヤR0、及びキャリヤK0に回転可能に支持されてそれらサンギヤS0及びリングギヤR0に噛み合わされている遊星ギヤP0から成るHL遊星歯車装置36と、サンギヤS0とキャリヤK0との間に設けられたクラッチC0及び一方向クラッチF0と、サンギヤS0及びハウジング38間に設けられたブレーキB0とを備えている。また、キャリヤK0は入力軸22と連結され、リングギヤR0は中間軸48と連結されている。
【0026】
第2変速部34は、サンギヤS1、リングギヤR1、及びキャリヤK1に回転可能に支持されてそれらサンギヤS1及びリングギヤR1に噛み合わされている遊星ギヤP1から成る第1遊星歯車装置40と、サンギヤS2、リングギヤR2、及びキャリヤK2に回転可能に支持されてそれらサンギヤS2及びリングギヤR2に噛み合わされている遊星ギヤP2から成る第2遊星歯車装置42と、サンギヤS3、リングギヤR3、及びキャリヤK3に回転可能に支持されてそれらサンギヤS3及びリングギヤR3に噛み合わされている遊星ギヤP3から成る第3遊星歯車装置44とを備えている。
【0027】
サンギヤS1とサンギヤS2とは互いに一体的に連結され、リングギヤR1とキャリヤK2とキャリヤK3とが一体的に連結され、そのキャリヤK3は出力軸46に連結されている。また、リングギヤR2とサンギヤS3は互いに一体的に連結されている。そして、リングギヤR2及びサンギヤS3と中間軸48との間にクラッチC1が設けられ、サンギヤS1及びサンギヤS2と中間軸48との間にクラッチC2が設けられている。また、サンギヤS1及びサンギヤS2の回転を止めるためのバンド式のブレーキB1がハウジング38に設けられている。また、サンギヤS1及びサンギヤS2とハウジング38との間には、一方向クラッチF1及びブレーキB2が直列に設けられている。この一方向クラッチF1は、サンギヤS1及びサンギヤS2が入力軸22と反対の方向へ逆回転しようとする際に係合させられるように構成されている。
【0028】
キャリヤK1とハウジング38との間にはブレーキB3が設けられており、リングギヤR3とハウジング38との間には、ブレーキB4と一方向クラッチF2とが並列に設けられている。この一方向クラッチF2は、リングギヤR3が逆回転しようとする際に係合させられるように構成されている。
【0029】
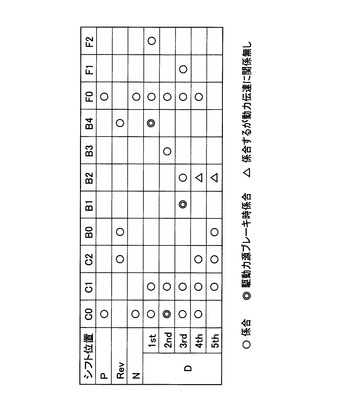
図2の作動表(係合表)は、自動変速機16において各変速段を成立させる際のクラッチC0〜C2、ブレーキB0〜B4の作動状態を説明する図表であり、「○」は係合状態を、「◎」はエンジンブレーキ(駆動力源ブレーキ)時のみ係合状態を、空欄は解放状態を、「△」は動力伝達に関与しない係合状態をそれぞれ表している。また、各変速段の変速比γ(入力軸22の回転速度NIN/出力軸46の回転速度NOUT)は、HL遊星歯車装置36、第1遊星歯車装置40、第2遊星歯車装置42、及び第3遊星歯車装置44の各ギヤ比ρ0、ρ1、ρ2、ρ3によって適宜定められる。また、クラッチC0〜C2及びブレーキB0〜B4は、多板式のクラッチやブレーキなど油圧アクチュエータによって係合制御される油圧式摩擦係合装置である。
【0030】
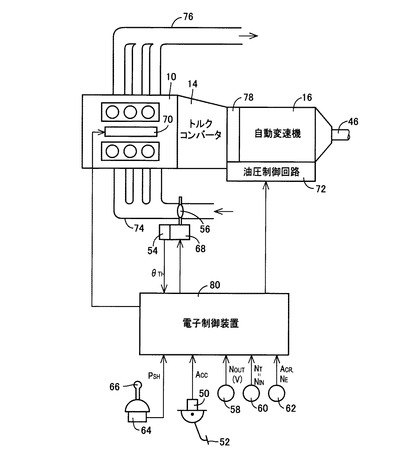
図3は、図1の動力伝達装置8などを制御するために車両に設けられた電気的な制御系統の要部を説明するブロック線図である。電子制御装置80は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより、エンジン10の出力制御や自動変速機16の変速制御やロックアップクラッチ26のトルク容量制御等を実行するようになっており、必要に応じてエンジン制御用や自動変速機16及びロックアップクラッチ26の油圧制御用等に分けて構成される。
【0031】
図3には電子制御装置80に入力される信号及びその電子制御装置80から出力される信号を例示した。例えば、電子制御装置80には、アクセル開度センサ50により検出されたアクセルペダル52の操作量であるアクセル開度Accを表すアクセル開度信号、スロットル弁開度センサ54により検出された電子スロットル弁56のスロットル弁開度θTHを表すスロットル弁開度信号、出力軸回転速度センサ58(図1参照)により検出された出力軸46の回転速度NOUTすなわち車速Vに対応する車速信号、タービン回転速度センサ60(図1参照)により検出されたタービン回転速度NT(=入力軸22の回転速度NIN)を表す信号、クランク角度センサ62(図1参照)により検出されたクランク軸回転角度(位置)ACR(°)及びエンジン回転速度NEに対応するクランク軸回転速度を表す信号、シフト検出スイッチ64により検出されたシフトレバー66の操作位置PSHを表す操作位置信号などが供給されている。
【0032】
また、電子制御装置80からは、アクセル開度Accに応じた大きさのスロットル弁開度θTHとするためのスロットルアクチュエータ68を駆動する信号、燃料噴射装置70から噴射される燃料の量を制御するための噴射信号、自動変速機16の変速段を切り換えるために油圧制御回路72内のシフト弁を駆動するシフトソレノイドを制御する信号及びライン油圧PLを制御するリニアソレノイド弁を駆動するための指令信号、ロックアップクラッチ26の係合、解放、スリップ量を制御する油圧制御回路72内のリニアソレノイド弁を駆動するための指令信号などが出力されている。
【0033】
このライン油圧PLは、エンジン10により回転駆動される機械式オイルポンプ78から発生する油圧を元圧として油圧制御回路72内の図示しない例えばリリーフ型調圧弁(レギュレータバルブ)によって、アクセル開度或いはスロットル開度で表されるエンジン負荷等に応じた値に調圧されるようになっている。
【0034】
また、エンジン10にはスロットルアクチュエータ68によって開閉制御される電子スロットル弁56が備えられている吸気管74及び排気管76が設けられている。電子スロットル弁56は、基本的には運転者の出力要求量を表すアクセル開度Accに対応するスロットル弁開度θTHとなるように制御される。
【0035】
シフトレバー66は、例えば運転席の近傍に配設され、各レバーポジション「P」、「R」、「N」、「D」等のうちの何れかへ手動操作されるようになっている。
【0036】
例えば、「P」ポジション(レンジ)は自動変速機16内の動力伝達経路を解放しすなわち自動変速機16内の動力伝達が遮断されるニュートラル状態(中立状態)とし且つメカニカルパーキング機構によって機械的に出力軸46の回転を阻止(ロック)するための駐車ポジション(位置)であり、「R」ポジションは自動変速機16の出力軸46の回転方向を逆回転とするための後進走行ポジション(位置)であり、「N」ポジションは自動変速機16内の動力伝達が遮断されるニュートラル状態とするための中立ポジション(位置)であり、「D」ポジションは自動変速機16の第1変速段乃至第5変速段の変速を許容する変速範囲で自動変速モードを成立させて第1変速段「1st」〜第5変速段「5th」の総ての前進変速段を用いて自動変速制御を実行させる前進走行ポジション(位置)である。
【0037】
上記「P」乃至「D」ポジションに示す各シフトポジションにおいて、「P」ポジション及び「N」ポジションは、自動変速機16内の動力伝達経路が遮断された車両を駆動不能とする動力伝達遮断ポジション(位置)であって、車両を走行させないときに選択される非走行ポジション(位置)である。また、「R」ポジション及び「D」ポジションは、自動変速機16内の動力伝達経路が連結された車両を駆動可能とする動力伝達可能ポジション(位置)であって、車両を走行させるときに選択される走行ポジションである。この走行ポジションにおいての車両走行状態には、例えばエンジン10側から駆動輪側へ動力が伝達される駆動状態となるアクセルオンのパワーオン走行状態と、駆動輪側からエンジン10側へ動力が伝達される被駆動状態となるアクセルオフのパワーオフ走行状態すなわち惰性走行(コースト走行)状態とがある。また、このパワーオフ走行状態では、自動変速機16内の係合状態やロックアップクラッチ26の係合状態に因って駆動輪側からの動力(回転)によりエンジン10が連れ回されてエンジンブレーキが生じさせられる。
【0038】
このように構成された電子制御装置80におけるエンジン10の出力制御では、エンジン10の出力制御の為にエンジン出力制御指令信号、例えばスロットル信号や噴射信号や点火時期信号などをそれぞれスロットルアクチュエータ68や燃料噴射装置70や不図示の点火装置へ出力する。例えば、アクセル開度Accに応じたスロットル弁開度θTHとなるように電子スロットル弁56を開閉するスロットル信号をスロットルアクチュエータ68へ出力してエンジントルクTEを制御する。
【0039】
また、ロックアップクラッチ26のトルク容量制御では、例えばスロットル弁開度θTH及び車速Vを変数とする二次元座標において解放(ロックアップオフ)領域、スリップ制御領域、係合(ロックアップオン)領域を有する予め記憶された関係(マップ、ロックアップ領域線図)から実際の車両走行状態例えばスロットル弁開度θTHと車速Vとに基づいてロックアップクラッチ26の作動状態の切換えを制御する。また、エンジン10の出力制御においてフューエルカット作動中であるときには、エンジン回転速度NEが急低下されないように、前記ロックアップ領域線図からの作動領域判断に拘わらずロックアップクラッチ26の作動状態を係合側に制御する。つまり、フューエルカット作動中は、駆動輪側からの動力(回転)によりエンジン10が連れ回される被駆動状態であることから、ロックアップクラッチ26を介して駆動輪側からの回転がエンジン10側へ伝達されるようにロックアップクラッチ26の作動状態を係合側に制御してエンジン回転速度NEを引き上げ、フューエルカット領域を拡大する。例えば、タービン回転速度NTに対して−50rpm程度のエンジン回転速度NEとなるようにロックアップクラッチ26をスリップ制御する。
【0040】
また、自動変速機16の変速制御では、例えば図4に示すような変速線図から実際の車速V及びスロットル弁開度θTHで示される車両状態に基づいて変速判断を行い、すなわち自動変速機16の変速を実行すべきか否かを判断し、例えば自動変速機16の変速すべき変速段を判断し、その判断した変速段が得られるように自動変速機16の自動変速制御を実行する。このとき、例えば図2に示す係合表に従って変速段が達成されるように、自動変速機16の変速に関与する油圧式摩擦係合装置を係合及び/又は解放させる指令(変速出力指令、油圧指令)を油圧制御回路72へ出力する。
【0041】
油圧制御回路72は、その指令に従って、自動変速機16の変速が実行されるように油圧制御回路72内のシフト弁を駆動するシフトソレノイドを作動させて、その変速に関与する油圧式摩擦係合装置の油圧アクチュエータを作動させる。
【0042】
図4の変速線図は、車速V及びスロットル弁開度θTHを変数とする二次元座標において変速段が判断される為の複数の領域を定める境界線としてのアップシフト用変速線とダウンシフト用変速線とをそれぞれ有する予め記憶された関係(変速マップ)である。図4において、実線はアップシフトが判断されるためのアップシフト用変速線であり、破線はダウンシフトが判断されるためのダウンシフト用変速線である。これらアップシフト用変速線及びダウンシフト用変速線は、同じ変速段間のアップシフトとダウンシフトとが短時間に繰り返し行われる変速ハンチングを防止するための所謂ヒステリシスを有するように、例えばn速と(n+1)速との間の変速線においては、ダウンシフト用変速線(n←(n+1)変速線)の方がアップシフト用変速線(n→(n+1)変速線)よりも低車速側或いは高アクセル開度側に設定されている。また、各変速線は、実際のスロットル弁開度θTH(%)を示す横線上において実際の車速Vが線を横切ったか否かすなわち変速線上の変速を実行すべき値(変速点車速)を越えたか否かを判断するためのものであり、この変速点車速の連なりとして予め記憶されている。
【0043】
従って、この変速制御では、車速Vが上昇したり、或いはアクセルペダル52の戻し操作が行われてスロットル弁開度θTHが小さくなったときには、アップシフト用変速線を高車速側へ横切ることに基づいてアップシフトが判定され、それまでの変速段からそれよりも高速側の変速段となるように自動変速機16がアップシフトされる。また、車速Vが低下したり、或いはアクセルペダル52の踏込み操作が行われてスロットル弁開度θTHが大きくなったときには、ダウンシフト用変速線を低車速側へ横切ることに基づいてダウンシフトが判定され、それまでの変速段からそれよりも低速側の変速段となるように自動変速機16がダウンシフトされる。
【0044】
例えば車両状態が1速→2速アップシフト用変速線と2速→3速アップシフト用変速線とで定められる領域R2Uに位置してその領域R2Uに対応する第2変速段にてアクセルオンのパワーオン走行中に、車速Vが上昇したことにより車両状態が2速→3速アップシフト用変速線を横切ったときには、第3変速段への2速→3速アップシフトを判断し、その第3変速段が得られるようにブレーキB3を解放させると共にクラッチC0及びブレーキB2を係合させる指令を油圧制御回路72に出力する。そして、油圧制御回路72によりブレーキB3の油圧アクチュエータの解放過渡油圧とクラッチC0及びブレーキB2の各油圧アクチュエータの係合過渡油圧とが調圧制御される。
【0045】
ここで、自動変速機16の変速制御にかかわる制御定数は、例えば変速の際に発生する変速ショックの抑制と変速応答性とを両立させるために、自動変速機16の変速に関与する油圧式摩擦係合装置の過渡油圧が適切に制御されるように予め設定される。以下に示す図5の車両用自動運転システム100は、その制御定数の調整すなわち適合を、正確かつ効率的に行うことが出来るようにするための油圧適合支援装置である。
【0046】
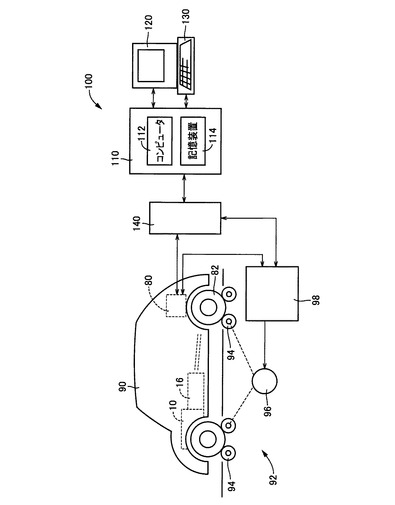
図5は、車両90の走行を試行するためのシャーシダイナモメータ92と、本発明が好適に適用される車両用自動運転システム100とを示している。シャーシダイナモメータ92は、車両90の駆動輪82を乗せる4本のローラ94と、そのローラ94に機械的に連結されそのローラ94に負荷を与える負荷装置96と、車両90の電子制御装置80に接続されて車両のアクセル開度Acc等の操作を制御するとともにその負荷装置96の負荷を制御するダイナモ制御装置98とを備え、実際の走行状態と同じ走行状態となるように予め設定された走行パターンに従って車両90を走行させるとともに、予め設定された実験計画に従う車両用自動運転システム100からの指令に従って車両90の自動変速機16の変速を発生させる。
【0047】
車両用自動運転システム100は、例えば電子制御装置80と同様に所謂CPU、ROM、RAM等を含み予め記憶されたプログラムに従って入力信号を処理するコンピュータ(電子制御装置)112、及び磁気テープ、光磁気ディスク、半導体メモリ等の外部的な記憶装置114を含んで構成された装置本体110と、二次元平面において文字、記号、画像を表示可能な画像表示装置120と、装置本体110に接続されたキーボード、マウス、画像表示装置120に一体に設けられたタッチパネル等の入力操作装置130と、車両90の電子制御装置80及び車両90に設けられた不図示のセンサを含む各センサ等と装置本体110との間に設けられた入出力インターフェイス140とを備え、例えば予め設定された計測対象の複数の対象変速を順に行わせる為の予め設定された運転パターンDPに従って自動変速機16を作動させてそれら変速が行われたときの車両状態を計測する。例えば、自動変速機16の変速制御の制御定数を複数段階で変化させたときに運転パターンDPに従って作動させた自動変速機16のそれぞれの変速時に得られる車両状態、例えば車両90の加速度波形、自動変速機16の変速を制御する油圧式摩擦係合装置の油圧波形、その油圧式摩擦係合装置への油圧を制御する油圧制御回路72内のシフトソレノイドに対する駆動電流波形(油圧指示波形、油圧指令値)Wなどの複数の変速波形を計測すると共に、それら複数種類の変速波形とそれが発生したときの制御定数等とをそれぞれ対応させたデータマップを構成し、それを記憶装置114に記憶する。
【0048】
尚、シャーシダイナモメータ92と車両用自動運転システム100とが別々の場所に独立して設置され、そのシャーシダイナモメータ92により得られた上記データマップが通信回線或いは記憶媒体を介して記憶装置114に記憶されてもよい。ここで、本実施例において、上記制御定数とは、上記駆動電流波形Wを特徴づける、例えばその駆動電流波形Wの所定区間の傾きや所定時点における変動値等の値でもある。
【0049】
ところで、運転パターンDPはユーザ(実験者、計測者等)が作成したものが設定されても良いが、車両用自動運転システム100において対象変速の一通りを可及的に短い時間で実行することができるすなわち可及的に短い時間でそれら変速時の車両状態を計測することができる最適運転パターンDPBを迅速に作成することは困難である可能性がある。そこで、本実施例のコンピュータ112は、最適運転パターンDPBを迅速に作成する運転パターン作成手段150を機能的に備え、この作成された最適運転パターンDPBを車両用自動運転システム100において自動変速機16を作動させるための運転パターンDPとして設定する。このように、コンピュータ112は、車両用自動運転システムにおける運転パターン設定装置でもある。
【0050】
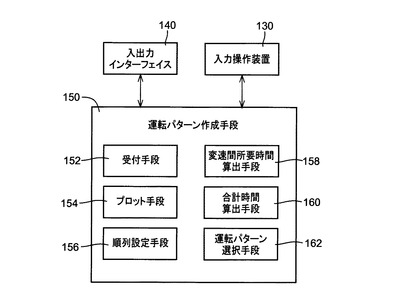
図6は、コンピュータ112による制御機能の要部を説明する機能ブロック線図である。図6において、運転パターン作成手段150は、例えば受付手段152とプロット手段154と順列設定手段156と変速間所要時間算出手段158と合計時間算出手段160と運転パターン選択手段162とを備え、複数の対象変速の何れをも順に行わせたときの所要時間が可及的に短くなるように前記図4に示したような変速マップにおける対象変速間の車速V方向の距離に基づいて最適運転パターンDPBを作成する。
【0051】
より具体的には、受付手段152は、手動操作に応答して対象変速を受け付ける、例えば入力操作装置130を介して対象変速をユーザから受け付ける。例えば、受付手段152は、アップシフトの場合には1→2アップシフトや2→3アップシフト等の変速の種類及びスロットル弁開度θTHが設定されることで対象変速を受け付け、ダウンシフトの場合には3→2ダウンシフトや4→3ダウンシフト等の変速の種類、車速V、スロットル弁開度θTH、スロットル弁開度θTHの変化率に相当するアクセルペダル52の踏み方、及び駆動状態/被駆動状態が設定されることで対象変速を受け付ける。
【0052】
以下に、対象変速の受付例を示す。
対象変速A:1→2アップシフト、θTH=20%
対象変速B:2→3アップシフト、θTH=20%
対象変速C:3→2ダウンシフト、V=20km/h、被駆動状態からの早踏み
対象変速D:4→3ダウンシフト、V=40km/h、被駆動状態からの早踏み
対象変速E:3→4アップシフト、θTH=50%
【0053】
尚、上記ダウンシフトのスロットル弁開度θTHについては、ここでは被駆動状態からの早踏みとしてθTH=→100%とする。このように、ダウンシフトの場合、変速の種類、車速V、スロットル弁開度θTH、アクセルペダル52の踏み方、及び駆動状態/被駆動状態はそれぞれ関連性があるので、ユーザが設定を進める中で、残りのパラメータを自動的に制限することができる。他の例としては、被駆動状態からのダウンシフトを設定すると図7に示すようにダウンシフト可能な車速範囲が制限されるので、ユーザはその車速範囲内で車速Vを設定する必要がある。反対に、駆動状態からのダウンシフトであると、変速前後のスロットル弁開度θTHをユーザに設定させる必要がある。
【0054】
プロット手段154は、自動変速機16用の変速マップが有する変速線(アップシフト用変速線、ダウンシフト用変速線)上における対象変速の位置を決める。つまり、受付手段152により受け付けられた対象変速の設定を元に、変速線上にそれら対象変速をプロットする。例えば、図7の変速マップに示すように、上記対象変速A〜Eが変速線上にプロットされる。従って、プロット手段154により対象変速が変速線上にプロット可能なように、受付手段152により対象変速の設定が受け付けられているという見方もできる。
【0055】
ここで、運転パターンDPは、変速線上にプロットされた全ての対象変速を含む変速マップ上の線をなぞるものであると見ることができる。この際、それぞれの対象変速間を直線で結ぶものであっても良いが、本実施例では図7の変速マップ上の一点鎖線に示すように、座標軸に平行となる直線によりそれぞれの対象変速間を結ぶものとする。
【0056】
そして、本実施例では、対象変速を一通り実行させる順列を替えた複数の運転パターンDPの中から、変速マップにおける対象変速間の車速V方向の距離に基づいてそれら対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンDPBを作成するのである。この際、各対象変速の順列を替えた全ての運転パターンDPを最適運転パターンDPB候補としても良い。
【0057】
しかし、対象変速の中でスロットル弁開度θTHが同等となるアップシフトについては、運転パターンDPにおいて連続させた方が連続させない場合に比較して上記所要時間が短くなると考えられる。すなわち同等開度のスロットル弁開度θTHは車両用自動運転システム100において一度に計測するのが効率的であると考えられる。このようなことから、受け付けられた対象変速の中でスロットル弁開度θTHが同等となるアップシフトがある場合には、スロットル弁開度θTHが同等となるアップシフトを連続させた運転パターンDPを最適運転パターンDPB候補とする。従って、スロットル弁開度θTHが同等となるアップシフトがある場合には、スロットル弁開度θTHが同等となるアップシフトを連続させない運転パターンDPは当初から最適運転パターンDPB候補から除外される。尚、スロットル弁開度θTHが同等となるアップシフトにおいては、車速Vの上昇によってアップシフトが判断されるので、より低速ギヤ段間の対象変速から先に実行される。
【0058】
また、本実施例では、運転パターンDPは、車速V及びスロットル弁開度θTHが零となる変速マップ上の原点を始点として対象変速が順に行われるように設定される。そうすると、スロットル弁開度θTHがより低開度に設定されたアップシフトについては、運転パターンDPにおいて最初に実行させた方が最初に実行させない場合に比較して上記所要時間が短くなると考えられる。このようなことから、受け付けられた対象変速の中でアップシフトがある場合には、スロットル弁開度θTHがより低開度に設定されたアップシフトを最初に実行させた運転パターンDPを最適運転パターンDPB候補とする。従って、アップシフトがある場合には、スロットル弁開度θTHがより低開度に設定されたアップシフト以外の対象変速を最初に実行させる運転パターンDPは当初から最適運転パターンDPB候補から除外される。
【0059】
そこで、順列設定手段156は、受付手段152により受け付けられた対象変速の中でスロットル弁開度θTHが同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように最適運転パターンDPB候補における対象変速の順列を設定させる。つまり、スロットル弁開度θTHが同等となるアップシフトを一連の変速とする。例えば、上記対象変速A、Bはスロットル弁開度θTHが同開度(20%)のアップシフトであるので、対象変速A、Bが連続して変速されるように対象変速A、Bを一連の変速として取り扱う。尚、対象変速Aの方がより低速ギヤ段間の対象変速であるので、この一連の変速においては対象変速Aが先に実行される順に設定される。尚、スロットル弁開度θTHが同等(同程度)とは、設定されたスロットル弁開度θTHが同開度であるのはもちろんのこと、例えば±5%や±10%以内に入っている場合も含んで良い。
【0060】
また、順列設定手段156は、受付手段152により受け付けられた対象変速の中でスロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に実行されるように最適運転パターンDPB候補における対象変速の順列を設定させる。例えば、アップシフトである対象変速A、B、Eの中でより低開度に設定された対象変速A、Bの何れかが最初に実行されるように最適運転パターンDPB候補が設定される。尚、対象変速A、Bはここでは一連の変速として取り扱われるので、実質的には変速マップの原点からスタートして対象変速Aが最初に実行され、続いて対象変速Bが実行されるように最適運転パターンDPB候補が設定される。以下、この一連の変速順を変速順0ABと表す。また他の変速順についても、同様に表す。例えば、対象変速Bに続いて対象変速Cが実行される変速順は変速順BCと表し、対象変速Dに続いて対象変速Cが実行される変速順は変速順DCと表す。
【0061】
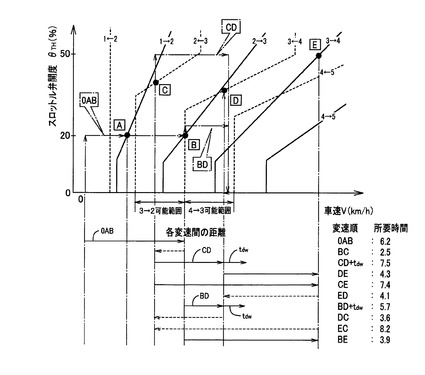
変速間所要時間算出手段158は、プロット手段154により決められた変速線上における対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離を何れをも取得し、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間を算出する。つまり、各変速順の変速マップにおける車速V方向の距離を取得し、その距離に基づいて各変速順の所要時間を算出する。変速間所要時間算出手段158は、例えばスロットル弁開度θTHに基づく加減速度から次の対象変速で設定された車速Vを得る為の時間を所定の運動方程式から求めることで、取得した距離に基づいた所要時間を算出する。例えば、図7に示すように、対象変速A〜Eにおける各変速順の距離(矢印の長さ)が取得され、それら距離がそれぞれ各変速順の所要時間に換算される。
【0062】
例えば、変速順0AB(一点鎖線0AB参照)においては、0からθTH=20%での2→3アップシフト用変速線における変速点車速までの距離0ABが取得され、θTH=20%で変速点車速に到達するまでの所要時間(6.2sec)が算出される。この変速順0ABでは、スロットル弁開度θTHを原点から20%まで増大させる時間は所要時間には含めていない。これは、スロットル弁開度θTHは瞬時に増大させることができるという考えからである。他の変速順においても基本的には同様であるが、アクセルペダル52の踏み方が早踏みでない場合(例えばゆっくり、遅踏み、中踏みなど)には、踏み方に応じた所定の時間を所要時間に加えるようにしても良い。また、スロットル弁開度θTHを減少させる場合も同様に所要時間には含めない。
【0063】
また、変速順BC、ED、DC、ECにおいては、被駆動状態でのダウンシフトであることから惰性走行により設定された車速に減速するまでの所要時間が算出される。
【0064】
また、変速順CD(一点鎖線CD参照)や変速順BD(一点鎖線BD参照)においては、低車速側から車速Vを上昇させた後の被駆動状態からのダウンシフトであることから、車速Vを設定よりも一旦上昇させてから惰性走行により設定された車速に減速する必要がある。図7に示した距離CDや距離BDにそれぞれ加えたtdwはそのための時間である。また、この場合は、設定よりも一旦上昇するように単純に車速Vを上げるだけでよいのでスロットル弁開度θTHが決定できない。そこで、例えば一律θTH=50%(一点鎖線CD参照)としたり、定常走行できる最低スロットル弁開度(ロードロードに相応するスロットル弁開度)を所定値増大させたスロットル弁開度(一点鎖線BD参照)としたりする。
【0065】
尚、前述したように本実施例では変速順0ABが最初に実行される一連の変速として取り扱われるので、例えば変速順CA、変速順CB、変速順DAなどの対象変速Aや対象変速Bへの順序となる変速順は初めから距離が取得されないし、もちろん所要時間も算出されない。
【0066】
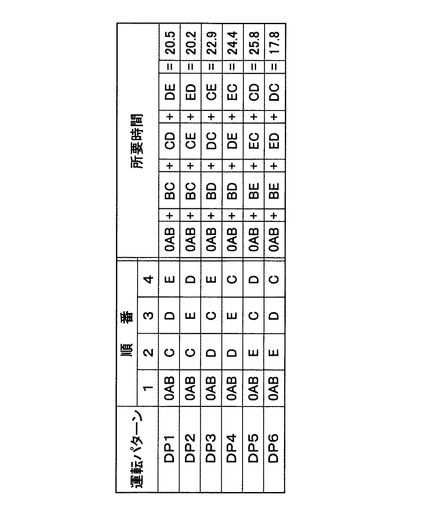
合計時間算出手段160は、受付手段152により受け付けられた対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に変速間所要時間算出手段158により算出された各変速順の所要時間をそれぞれ加算した合計所要時間を算出する。図8は、本実施例での最適運転パターンDPB候補を列記したものであり、各運転パターンDP毎における合計所要時間を示す図表である。例えば、運転パターンDP1は対象変速A、対象変速B、対象変速C、対象変速D、対象変速Eの順に変速が実行される運転パターンDPであり、変速順0AB(6.2sec)、変速順BC(2.5sec)、変速順CD(7.5sec)、変速順DE(4.3sec)の各所要時間が加算されて運転パターンDP1における合計所要時間(20.5sec)が算出される。他の運転パターンDP2、3、4、5、6についても同様にそれぞれの合計所要時間が算出される。
【0067】
運転パターン選択手段162は、合計時間算出手段160により算出された合計所要時間が最短となる最適運転パターンDPB候補を最適運転パターンDPBとして選択する。例えば、運転パターンDP1〜6の中から合計所要時間が最短となる運転パターンDP6が選択される。
【0068】
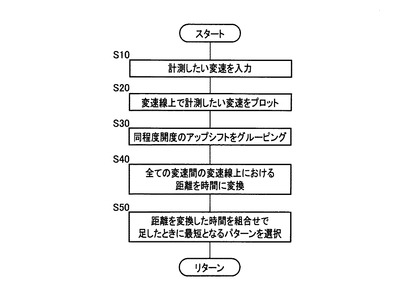
図9は、コンピュータ112の制御作動の要部すなわち対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンDPBを作成する為の制御作動を説明するフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0069】
図9において、先ず、受付手段152に対応するステップ(以下、ステップを省略する)S10において、例えば入力操作装置130を介して対象変速がユーザから受け付けられる。例えば、前記対象変速A〜Eが受け付けられる。次いで、プロット手段154に対応するS20において、変速マップの変速線上における対象変速の位置が決められる。つまり、前記S10において受け付けられた対象変速の設定を元に、変速線上にそれら対象変速がプロットされる。例えば、図7の変速マップに示すように、上記対象変速A〜Eが変速線上にプロットされる。
【0070】
次いで、順列設定手段156に対応するS30において、前記S10において受け付けられた対象変速の中でスロットル弁開度θTHが同程度開度となるアップシフトが複数ある場合は、それらアップシフト群が連続するように最適運転パターンDPB候補における対象変速の順列が設定される。つまり、スロットル弁開度θTHが同程度開度となるアップシフトがグルーピングされる。例えば、上記対象変速A、Bはスロットル弁開度θTHが同開度(20%)のアップシフトであるので、対象変速A、Bがグルーピングされる。また、このS30では、前記S10において受け付けられた対象変速の中でスロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に実行されるように最適運転パターンDPB候補における対象変速の順列が設定される。例えば、グルーピングされた対象変速A、Bと対象変速Eとでは、対象変速A、Bの方がより低開度に設定されているので、変速マップの原点からスタートして対象変速A、Bが実行されるように最適運転パターンDPB候補が設定される。
【0071】
次いで、変速間所要時間算出手段158に対応するS40において、前記S20においてプロットされた変速線上における対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間が算出される。例えば、図7に示すように、対象変速A〜Eにおける各変速順の距離が取得され、それら距離がそれぞれ各変速順の所要時間に換算される。
【0072】
次いで、合計時間算出手段160及び運転パターン選択手段162に対応するS50において、前記S10において受け付けられた対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に前記S40において算出された各変速順の所要時間をそれぞれ加算した合計所要時間が算出される。例えば、図8の図表に示すように対象変速A〜Eに基づいた各運転パターンDP1〜6毎における合計所要時間がそれぞれ算出される。そして、ここで算出された合計所要時間が最短となる最適運転パターンDPB候補が最適運転パターンDPBとして選択される。例えば、運転パターンDP1〜6の中から合計所要時間が最短となる運転パターンDP6が選択される。
【0073】
上述のように、本実施例によれば、運転パターン作成手段150により、計測対象となる複数の対象変速を一通り順に行わせたときの所要時間が可及的に短くなるように変速マップにおけるその対象変速間の車速V方向の距離に基づいて最適運転パターンDPBが作成されるので、車両用自動運転システム100において対象変速の一通りを可及的に短い時間で計測することができるすなわち可及的に短い時間でそれら変速時の車両状態を計測することができる最適運転パターンDPBが迅速に作成される。
【0074】
また、本実施例によれば、運転パターン作成手段150は受付手段152とプロット手段154と変速間所要時間算出手段158と合計時間算出手段160と運転パターン選択手段162とを備えており、受付手段152により対象変速が受け付けられ、プロット手段154により変速線上における対象変速の位置が決められ、変速間所要時間算出手段158により変速線上の対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいてその対象変速を順に行わせたときのその対象変速間における所要時間が算出され、合計時間算出手段160により対象変速を何れも含むその対象変速の順列で設定された運転パターンDP毎に所要時間を加算した合計所要時間が算出され、運転パターン選択手段162により合計所要時間が最短となる運転パターンDPが最適運転パターンDPBとして選択されるので、最適運転パターンDPBが適切且つ迅速に作成される。
【0075】
また、本実施例によれば、変速間所要時間算出手段158は、スロットル弁開度θTHに基づく加減速度から車速Vを得る為の時間を求めることで、取得した距離に基づいて所要時間を算出するので、取得された距離に基づく所要時間が適切に算出され、結果として最適運転パターンDPBが適切に作成される。
【0076】
また、本実施例によれば、受付手段152は、アップシフトの場合には1→2変速や2→3変速等の変速の種類及びスロットル弁開度θTHが設定されることで対象変速を受け付け、ダウンシフトの場合には3→2変速や2→1変速等の変速の種類、車速V、スロットル弁開度θTH、アクセルペダル52の踏み方、及び駆動状態/被駆動状態が設定されることで対象変速を受け付けるので、計測対象となる対象変速が運転パターンDPに適切に反映され、車両用自動運転システム100においてその運転パターンDPに従って変速時の車両状態が適切に計測される。
【0077】
また、本実施例によれば、対象変速の中でスロットル弁開度θTHが同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように運転パターンDPにおけるその対象変速の順列を設定させる順列設定手段が更に備えられるので、スロットル弁開度θTHが同等となるアップシフト群が連続して行われる運転パターンDPに比較して合計所要時間が長くなるようなアップシフト群が連続しない運転パターンDPが最適運転パターンDPB候補として初めから作成されない。よって、最適運転パターンDPBが適切且つ一層迅速に作成される。
【0078】
また、本実施例によれば、運転パターンDPは車速V及びスロットル弁開度θTHが零となる変速マップ上の原点を始点として対象変速が順に行われるように設定されるものであり、スロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に実行されるように運転パターンDPにおける対象変速の順列を設定させる順列設定手段が更に備えられるので、運転パターンDPが変速マップ上の原点を始点として対象変速が順に行われる場合には、スロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に行われる運転パターンDPに比較して合計所要時間が長くなるようなアップシフトの対象変速が最初に行われない運転パターンDPが最適運転パターンDPB候補として初めから作成されない。よって、最適運転パターンDPBが適切且つ一層迅速に作成される。
【0079】
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
【0080】
例えば、前述の実施例では、運転パターンDPは、車速V及びスロットル弁開度θTHが零となる変速マップ上の原点を始点として対象変速が順に行われるように設定されたが、必ずしも変速マップ上の原点を始点とする必要はない。例えば、少なくとも車速Vが零となる変速マップ上の点を始点としても良い。
【0081】
また、前述の実施例では、低車速側から車速Vを上昇させた後の被駆動状態からのダウンシフトである場合にはtdwを加えて所定時間を算出したが、低車速側から車速Vを上昇させた後のダウンシフトである場合でも駆動状態からのダウンシフトでは所定時間の算出の際にtdwを加える必要はない。
【0082】
また、車両用自動運転システム100において計測対象となる車両90が複数あるような場合には、計測対象となる車両90の諸元例えば変速マップ等を計測の都度ユーザが入力操作装置130を介して入力するようにしても良い。このようにすれば、より多くの車両を計測対象とすることができる。
【0083】
なお、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0084】
【図1】本発明の適用対象となる車両の動力伝達装置の概略構成を例示する骨子図である。
【図2】図1の車両用自動変速機の複数の変速段を成立させる際の油圧式摩擦係合装置の作動の組み合わせを例示する作動図表である。
【図3】図1の動力伝達装置などを制御するために車両に設けられた電気的な制御系統の要部を例示するブロック線図である。
【図4】図1の車両用自動変速機の変速制御において用いられる変速線図の一例を示す図である。
【図5】本発明が好適に適用される車両用自動運転システムを、実際の走行状態と同じ走行状態となるように車両を走行させるシャーシダイナモメータと共に例示する図である。
【図6】車両用自動運転システムのコンピュータによる制御機能の要部を説明する機能ブロック線図である。
【図7】変速マップの変速線上にプロットされた対象変速を例示すると共に、対象変速間の距離や取得した距離に基づいた所要時間などを例示する図である。
【図8】本実施例での最適運転パターン候補を列記したものであり、各運転パターン毎における合計所要時間を示す図表である。
【図9】車両用自動運転システムのコンピュータの制御作動の要部すなわち対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンを作成する為の制御作動を説明するフローチャートである。
【符号の説明】
【0085】
16:車両用自動変速機
100:車両用自動運転システム
112:コンピュータ(運転パターン設定装置)
150:運転パターン作成手段
152:受付手段
154:プロット手段
156:順列設定手段
158:変速間所要時間算出手段
160:合計時間算出手段
162:運転パターン選択手段
DP:運転パターン
DPB:最適運転パターン
【技術分野】
【0001】
本発明は、車両用自動変速機を所定の運転パターンに従って作動させる車両用自動運転システムに係り、特に、その運転パターンの設定に関するものである。
【背景技術】
【0002】
制御対象となる装置を所定のパラメータで定められる予め設定された運転パターンに従って作動させてその作動を記録(計測)する自動運転システムにおいては、計測目的に応じた独自の運転パターンが作成される。
【0003】
例えば、特許文献1には、XMLスキーマ文書で定義したXML文書が取り得る構造とXML文書で作成した運転パターンを作成することにより運転パターンの妥当性を自動チェック及びその修正を可能にし、またXMLスキーマ文書から運転パターン解釈プログラムを自動作成しておくことによりXML文書の運転パターンを自動運転システムで利用可能な運転パターンデータに自動展開可能にしたことで、自動運転システムにおける運転パターンの作成・変更が容易になる方法が記載されている。
【0004】
また、特許文献2には、運転パターンが傾斜部分と定常部分の繰り返しになることに着目し、1つの傾斜部分と定常部分とをもつパターンを基本運転パターンとしてその組合せでエンジン自動運転の運転指令データを簡単、短時間で自動的に作成することができる自動運転システムが記載されている。
【0005】
また、特許文献3には、走行パターンデータと変速位置データとを分離記憶し、模擬走行試験対象となる自動車の車種別及びテストモードの組合せに応じてパターンデータを自動作成することにより、対象となる自動車に特有のパターンデータを作成することを容易にし、またパターンデータの追加、変更を容易にすることができる走行テストパターンの作成装置が記載されている。
【0006】
【特許文献1】特開2005−301537号公報
【特許文献2】特開平11−24703号公報
【特許文献3】実開平6−56749号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、変速段が判断される為の複数の変速線を有する予め記憶された関係(変速マップ)に基づいて自動変速が行われる車両用自動変速機の自動運転システムにおいても、計測対象の変速を含む運転パターンを作成する必要がある。
【0008】
例えば、このような車両用自動変速機では、自動変速機の変速に関与する係合装置(クラッチ、ブレーキ)の解放と係合とが制御される変速制御において変速ショックの抑制と変速応答性とが両立するように変速制御にかかわる制御定数(例えば係合装置の係合圧パラメータ(係合圧指令値))を個々に設定する自動変速機適合が行われる。この自動変速機適合に用いるデータを収集する為に、自動運転システムにより、計測対象の変速を順に行わせる為の予め設定された運転パターンに従って自動変速機が作動させられ、それら変速が行われたときの車両状態(例えば変速機出力トルク、加速度)が計測される。この際、変速制御にかかわる制御定数を変更しながら適合作業に必要な膨大なデータを収集することから、自動運転システムにおいては計測対象となる変速の一通りを短時間で実行することができるすなわち短時間でそれら変速時の車両状態を計測することができる効率良い運転パターンを設定することが望まれる。
【0009】
しかしながら、適合作業において要求される計測対象の変速が一様でないことすなわち適合作業において要求される運転パターンが一様でないこと、車両によって例えば変速線が異なるので効率良い運転パターンが異なることなどから、効率良い運転パターンを迅速に作成することは困難である可能性があった。また、特許文献1〜3には、運転パターンの作成自体のし易さを向上させる方法が記載されているものの、車両用自動変速機適合時の自動運転システムにおける運転パターンを作成するものではなく、まして効率良い運転パターンを迅速に作成できるようにするものでもない。尚、上述したような課題は未公知である。
【0010】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、車両用自動運転システムにおいて、予め設定された計測対象の複数の対象変速を順に行わせたときの所要時間が可及的に短くなるような最適運転パターンを迅速に作成することができる運転パターン設定装置を提供することにある。
【課題を解決するための手段】
【0011】
前記目的を達成するための本発明の要旨とするところは、(a) 少なくとも車速関連値を変数として変速段が判断される為の複数の変速線を有する予め記憶された関係に基づいて自動変速が行われる車両用自動変速機を予め設定された計測対象の対象変速を順に行わせる為の予め設定された運転パターンに従って作動させてその変速が行われたときの車両状態を計測する車両用自動運転システムにおける運転パターン設定装置であって、(b) 前記複数の対象変速の何れをも順に行わせたときの所要時間が可及的に短くなるように前記予め記憶された関係におけるその対象変速間の車速関連値方向の距離に基づいて前記運転パターンを作成する運転パターン作成手段を備えることにある。
【発明の効果】
【0012】
このようにすれば、運転パターン作成手段により、計測対象となる複数の対象変速を一通り順に行わせたときの所要時間が可及的に短くなるように前記予め記憶された関係におけるその対象変速間の車速関連値方向の距離に基づいて前記運転パターンが作成されるので、車両用自動運転システムにおいて対象変速の一通りを可及的に短い時間で計測することができるすなわち可及的に短い時間でそれら変速時の車両状態を計測することができる最適運転パターンが迅速に作成される運転パターン設定装置が提供される。
【0013】
ここで、好適には、前記運転パターン作成手段は、(a) 手動操作に応答して前記対象変速を受け付ける受付手段と、(b) 前記変速線上における前記対象変速の位置を決めるプロット手段と、(c) 前記変速線上の位置に基づいて前記予め記憶された関係における前記対象変速間の車速関連値方向の距離を何れをも取得し、その距離に基づいてその対象変速を順に行わせたときのその対象変速間における所要時間を算出する変速間所要時間算出手段と、(d) 前記対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に前記所要時間を加算した合計所要時間を算出する合計時間算出手段と、(e) 前記合計所要時間が最短となる運転パターンを最適運転パターンとして選択する運転パターン選択手段とを、備える。このようにすれば、受付手段により対象変速が受け付けられると、予め記憶された関係における変速線上の対象変速の位置に基づいた対象変速間の車速関連値方向の距離に基づいて変速間所要時間算出手段によりその対象変速を順に行わせたときのその対象変速間における所要時間が算出され、対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に所要時間が加算されて合計時間算出手段により算出された合計所要時間が最短となる運転パターンが運転パターン選択手段により最適運転パターンとして選択されるので、前記最適運転パターンが適切且つ迅速に作成される。
【0014】
また、好適には、前記予め記憶された関係は、前記車速関連値及びスロットル弁開度関連値を変数とするものであり、前記変速間所要時間算出手段は、前記スロットル弁開度関連値に基づく加減速度から前記車速関連値を得る為の時間を求めることで、前記取得した距離に基づいて前記所要時間を算出するものである。このようにすれば、変速間所要時間算出手段により取得された距離に基づく所要時間が適切に算出され、結果として前記最適運転パターンが適切に作成される。
【0015】
また、好適には、前記受付手段は、アップシフトの場合には1→2変速や2→3変速等の変速の種類及び前記スロットル弁開度関連値が設定されることで前記対象変速を受け付け、ダウンシフトの場合には3→2変速や2→1変速等の変速の種類、前記車速関連値、前記スロットル弁開度関連値、前記スロットル弁開度関連値の変化率相当値、及び駆動状態/被駆動状態が設定されることで前記対象変速を受け付ける。このようにすれば、計測対象となる対象変速が運転パターンに適切に反映され、車両用自動運転システムにおいてその運転パターンに従って変速時の車両状態が適切に計測される。
【0016】
また、好適には、前記対象変速の中で前記スロットル弁開度関連値が同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように前記運転パターンにおけるその対象変速の順列を設定させる順列設定手段を更に備える。このようにすれば、スロットル弁開度関連値が同等となるアップシフト群が連続して行われる運転パターンに比較して合計所要時間が長くなるようなアップシフト群が連続しない運転パターンが最適運転パターン候補として初めから作成されないので、前記最適運転パターンが適切且つ一層迅速に作成される。
【0017】
また、好適には、前記運転パターンは、前記車速関連値及びスロットル弁開度関連値が零となる前記予め記憶された関係上の原点を始点として前記対象変速が順に行われるように設定されるものであり、前記スロットル弁開度関連値がより低開度に設定されたアップシフトの対象変速が最初に実行されるように前記運転パターンにおける前記対象変速の順列を設定させる順列設定手段を更に備える。このようにすれば、前記運転パターンが前記予め記憶された関係上の原点を始点として前記対象変速が順に行われる場合には、前記スロットル弁開度関連値がより低開度に設定されたアップシフトの対象変速が最初に行われる運転パターンに比較して合計所要時間が長くなるようなアップシフトの対象変速が最初に行われない運転パターンが最適運転パターン候補として初めから作成されないので、前記最適運転パターンが適切且つ一層迅速に作成される。
【0018】
また、好適には、本発明は、新規すなわち今までにないエンジンと自動変速機との組み合わせを含む車両の開発段階における適合作業に用いられるが、製造段階あるいは車両販売後の定期検査などの段階における適合作業に用いられてもよい。また、車両がシャーシダイナモメータに乗せられ試行されている状態で用いられてもよいし、車両がテストコース等にて運転されている状態で用いられてもよい。また、完成車両に対して用いられてもよいし、エンジンが連結された状態の自動変速機に対して用いられてもよいし、電動モータ等のエンジン代替装置が連結された状態の自動変速機に対して用いられてもよい等、種々の態様が可能である。
【0019】
また、好適には、前記車速関連値とは、例えば車両の速度である車速に1対1に対応する関連値(相当値)であって、車速関連値としてその車速はもちろんのことその他に、例えば変速機の出力回転速度、車軸の回転速度、プロペラシャフトの回転速度、差動歯車装置の出力回転速度などが用いられる。尚、明細書全体を通して、特に区別しない限り車速と表したものは車速関連値をも表すこととする。
【0020】
また、好適には、前記スロットル弁開度関連値とは、例えばスロットル弁の開度を示すスロットル弁開度に1対1に対応する関連値(相当値)であって、スロットル弁開度関連値としてそのスロットル弁開度はもちろんのことその他に、例えばアクセルペダルの操作量(踏込量)を示すアクセル開度、エンジンの吸気管に設けられたチャンバ内或いはシリンダ内へ噴射される燃料の噴射量を示す燃料噴射量、エンジンの吸気管により吸入される吸入空気量などが用いられる。また、このスロットル弁開度関連値は、エンジンの負荷に関連する負荷関連値や運転者が車両に要求する出力要求量と見ることもできる。尚、明細書全体を通して、特に区別しない限りスロットル弁開度と表したものはスロットル弁開度関連値をも表すこととする。
【0021】
また、好適には、前記車両用自動変速機は、複数組の遊星歯車装置の回転要素が係合装置によって選択的に連結されることにより複数のギヤ段(変速段)が択一的に達成される例えば、前進5段、前進6段、前進7段、前進8段等の種々の遊星歯車式多段変速機、常時噛み合う複数対の変速ギヤを2軸間に備えてそれら複数対の変速ギヤのいずれかを同期装置によって択一的に動力伝達状態とする同期噛合型平行2軸式変速機ではあるが、油圧アクチュエータにより駆動される同期装置によって変速段が自動的に切換られることが可能な同期噛合型平行2軸式自動変速機などにより構成される。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例】
【0023】
図1は、本発明の適用対象となる車両の動力伝達装置8の構成を説明する骨子図である。図1において、例えば内燃機関にて構成されている走行用駆動力源としてのエンジン10の出力は、クランク軸12、流体伝動装置としてのトルクコンバータ14を経て車両用自動変速機(以下、自動変速機)16に入力され、図示しない差動歯車装置、車軸等を介して駆動輪へ伝達されるようになっている。このようにエンジン10の出力が駆動輪へ伝達されるまでが動力伝達経路であり、その動力伝達経路を構成する動力伝達装置8はトルクコンバータ14、車両用自動変速機16(以下、自動変速機16という)、及び上記差動歯車装置等である。尚、トルクコンバータ14や自動変速機16はその軸心に対して略対称的に構成されており、図1の骨子図においてはその軸心の下半分が省略されている。
【0024】
トルクコンバータ14は、クランク軸12に連結されたポンプ翼車20と、自動変速機16の入力軸22に連結されたタービン翼車24と、それらポンプ翼車20及びタービン翼車24の間を直結するためのロックアップクラッチ26と、一方向クラッチ28によって一方向の回転が阻止されているステータ翼車30とを備えている。ロックアップクラッチ26は、係合側油室25内の油圧と解放側油室27内の油圧との差圧ΔPにより摩擦係合させられる油圧式摩擦クラッチであり、それが完全係合させられることにより、ポンプ翼車20及びタービン翼車24は一体回転させられる。
【0025】
自動変速機16は複数の変速段が選択的に成立させられるすなわち切り換えられる有段変速機であり、ハイ及びローの2段の切り換えを行う第1変速部32と、後進変速段及び前進4段の切り換えが可能な第2変速部34とを備えている。第1変速部32は、サンギヤS0、リングギヤR0、及びキャリヤK0に回転可能に支持されてそれらサンギヤS0及びリングギヤR0に噛み合わされている遊星ギヤP0から成るHL遊星歯車装置36と、サンギヤS0とキャリヤK0との間に設けられたクラッチC0及び一方向クラッチF0と、サンギヤS0及びハウジング38間に設けられたブレーキB0とを備えている。また、キャリヤK0は入力軸22と連結され、リングギヤR0は中間軸48と連結されている。
【0026】
第2変速部34は、サンギヤS1、リングギヤR1、及びキャリヤK1に回転可能に支持されてそれらサンギヤS1及びリングギヤR1に噛み合わされている遊星ギヤP1から成る第1遊星歯車装置40と、サンギヤS2、リングギヤR2、及びキャリヤK2に回転可能に支持されてそれらサンギヤS2及びリングギヤR2に噛み合わされている遊星ギヤP2から成る第2遊星歯車装置42と、サンギヤS3、リングギヤR3、及びキャリヤK3に回転可能に支持されてそれらサンギヤS3及びリングギヤR3に噛み合わされている遊星ギヤP3から成る第3遊星歯車装置44とを備えている。
【0027】
サンギヤS1とサンギヤS2とは互いに一体的に連結され、リングギヤR1とキャリヤK2とキャリヤK3とが一体的に連結され、そのキャリヤK3は出力軸46に連結されている。また、リングギヤR2とサンギヤS3は互いに一体的に連結されている。そして、リングギヤR2及びサンギヤS3と中間軸48との間にクラッチC1が設けられ、サンギヤS1及びサンギヤS2と中間軸48との間にクラッチC2が設けられている。また、サンギヤS1及びサンギヤS2の回転を止めるためのバンド式のブレーキB1がハウジング38に設けられている。また、サンギヤS1及びサンギヤS2とハウジング38との間には、一方向クラッチF1及びブレーキB2が直列に設けられている。この一方向クラッチF1は、サンギヤS1及びサンギヤS2が入力軸22と反対の方向へ逆回転しようとする際に係合させられるように構成されている。
【0028】
キャリヤK1とハウジング38との間にはブレーキB3が設けられており、リングギヤR3とハウジング38との間には、ブレーキB4と一方向クラッチF2とが並列に設けられている。この一方向クラッチF2は、リングギヤR3が逆回転しようとする際に係合させられるように構成されている。
【0029】
図2の作動表(係合表)は、自動変速機16において各変速段を成立させる際のクラッチC0〜C2、ブレーキB0〜B4の作動状態を説明する図表であり、「○」は係合状態を、「◎」はエンジンブレーキ(駆動力源ブレーキ)時のみ係合状態を、空欄は解放状態を、「△」は動力伝達に関与しない係合状態をそれぞれ表している。また、各変速段の変速比γ(入力軸22の回転速度NIN/出力軸46の回転速度NOUT)は、HL遊星歯車装置36、第1遊星歯車装置40、第2遊星歯車装置42、及び第3遊星歯車装置44の各ギヤ比ρ0、ρ1、ρ2、ρ3によって適宜定められる。また、クラッチC0〜C2及びブレーキB0〜B4は、多板式のクラッチやブレーキなど油圧アクチュエータによって係合制御される油圧式摩擦係合装置である。
【0030】
図3は、図1の動力伝達装置8などを制御するために車両に設けられた電気的な制御系統の要部を説明するブロック線図である。電子制御装置80は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより、エンジン10の出力制御や自動変速機16の変速制御やロックアップクラッチ26のトルク容量制御等を実行するようになっており、必要に応じてエンジン制御用や自動変速機16及びロックアップクラッチ26の油圧制御用等に分けて構成される。
【0031】
図3には電子制御装置80に入力される信号及びその電子制御装置80から出力される信号を例示した。例えば、電子制御装置80には、アクセル開度センサ50により検出されたアクセルペダル52の操作量であるアクセル開度Accを表すアクセル開度信号、スロットル弁開度センサ54により検出された電子スロットル弁56のスロットル弁開度θTHを表すスロットル弁開度信号、出力軸回転速度センサ58(図1参照)により検出された出力軸46の回転速度NOUTすなわち車速Vに対応する車速信号、タービン回転速度センサ60(図1参照)により検出されたタービン回転速度NT(=入力軸22の回転速度NIN)を表す信号、クランク角度センサ62(図1参照)により検出されたクランク軸回転角度(位置)ACR(°)及びエンジン回転速度NEに対応するクランク軸回転速度を表す信号、シフト検出スイッチ64により検出されたシフトレバー66の操作位置PSHを表す操作位置信号などが供給されている。
【0032】
また、電子制御装置80からは、アクセル開度Accに応じた大きさのスロットル弁開度θTHとするためのスロットルアクチュエータ68を駆動する信号、燃料噴射装置70から噴射される燃料の量を制御するための噴射信号、自動変速機16の変速段を切り換えるために油圧制御回路72内のシフト弁を駆動するシフトソレノイドを制御する信号及びライン油圧PLを制御するリニアソレノイド弁を駆動するための指令信号、ロックアップクラッチ26の係合、解放、スリップ量を制御する油圧制御回路72内のリニアソレノイド弁を駆動するための指令信号などが出力されている。
【0033】
このライン油圧PLは、エンジン10により回転駆動される機械式オイルポンプ78から発生する油圧を元圧として油圧制御回路72内の図示しない例えばリリーフ型調圧弁(レギュレータバルブ)によって、アクセル開度或いはスロットル開度で表されるエンジン負荷等に応じた値に調圧されるようになっている。
【0034】
また、エンジン10にはスロットルアクチュエータ68によって開閉制御される電子スロットル弁56が備えられている吸気管74及び排気管76が設けられている。電子スロットル弁56は、基本的には運転者の出力要求量を表すアクセル開度Accに対応するスロットル弁開度θTHとなるように制御される。
【0035】
シフトレバー66は、例えば運転席の近傍に配設され、各レバーポジション「P」、「R」、「N」、「D」等のうちの何れかへ手動操作されるようになっている。
【0036】
例えば、「P」ポジション(レンジ)は自動変速機16内の動力伝達経路を解放しすなわち自動変速機16内の動力伝達が遮断されるニュートラル状態(中立状態)とし且つメカニカルパーキング機構によって機械的に出力軸46の回転を阻止(ロック)するための駐車ポジション(位置)であり、「R」ポジションは自動変速機16の出力軸46の回転方向を逆回転とするための後進走行ポジション(位置)であり、「N」ポジションは自動変速機16内の動力伝達が遮断されるニュートラル状態とするための中立ポジション(位置)であり、「D」ポジションは自動変速機16の第1変速段乃至第5変速段の変速を許容する変速範囲で自動変速モードを成立させて第1変速段「1st」〜第5変速段「5th」の総ての前進変速段を用いて自動変速制御を実行させる前進走行ポジション(位置)である。
【0037】
上記「P」乃至「D」ポジションに示す各シフトポジションにおいて、「P」ポジション及び「N」ポジションは、自動変速機16内の動力伝達経路が遮断された車両を駆動不能とする動力伝達遮断ポジション(位置)であって、車両を走行させないときに選択される非走行ポジション(位置)である。また、「R」ポジション及び「D」ポジションは、自動変速機16内の動力伝達経路が連結された車両を駆動可能とする動力伝達可能ポジション(位置)であって、車両を走行させるときに選択される走行ポジションである。この走行ポジションにおいての車両走行状態には、例えばエンジン10側から駆動輪側へ動力が伝達される駆動状態となるアクセルオンのパワーオン走行状態と、駆動輪側からエンジン10側へ動力が伝達される被駆動状態となるアクセルオフのパワーオフ走行状態すなわち惰性走行(コースト走行)状態とがある。また、このパワーオフ走行状態では、自動変速機16内の係合状態やロックアップクラッチ26の係合状態に因って駆動輪側からの動力(回転)によりエンジン10が連れ回されてエンジンブレーキが生じさせられる。
【0038】
このように構成された電子制御装置80におけるエンジン10の出力制御では、エンジン10の出力制御の為にエンジン出力制御指令信号、例えばスロットル信号や噴射信号や点火時期信号などをそれぞれスロットルアクチュエータ68や燃料噴射装置70や不図示の点火装置へ出力する。例えば、アクセル開度Accに応じたスロットル弁開度θTHとなるように電子スロットル弁56を開閉するスロットル信号をスロットルアクチュエータ68へ出力してエンジントルクTEを制御する。
【0039】
また、ロックアップクラッチ26のトルク容量制御では、例えばスロットル弁開度θTH及び車速Vを変数とする二次元座標において解放(ロックアップオフ)領域、スリップ制御領域、係合(ロックアップオン)領域を有する予め記憶された関係(マップ、ロックアップ領域線図)から実際の車両走行状態例えばスロットル弁開度θTHと車速Vとに基づいてロックアップクラッチ26の作動状態の切換えを制御する。また、エンジン10の出力制御においてフューエルカット作動中であるときには、エンジン回転速度NEが急低下されないように、前記ロックアップ領域線図からの作動領域判断に拘わらずロックアップクラッチ26の作動状態を係合側に制御する。つまり、フューエルカット作動中は、駆動輪側からの動力(回転)によりエンジン10が連れ回される被駆動状態であることから、ロックアップクラッチ26を介して駆動輪側からの回転がエンジン10側へ伝達されるようにロックアップクラッチ26の作動状態を係合側に制御してエンジン回転速度NEを引き上げ、フューエルカット領域を拡大する。例えば、タービン回転速度NTに対して−50rpm程度のエンジン回転速度NEとなるようにロックアップクラッチ26をスリップ制御する。
【0040】
また、自動変速機16の変速制御では、例えば図4に示すような変速線図から実際の車速V及びスロットル弁開度θTHで示される車両状態に基づいて変速判断を行い、すなわち自動変速機16の変速を実行すべきか否かを判断し、例えば自動変速機16の変速すべき変速段を判断し、その判断した変速段が得られるように自動変速機16の自動変速制御を実行する。このとき、例えば図2に示す係合表に従って変速段が達成されるように、自動変速機16の変速に関与する油圧式摩擦係合装置を係合及び/又は解放させる指令(変速出力指令、油圧指令)を油圧制御回路72へ出力する。
【0041】
油圧制御回路72は、その指令に従って、自動変速機16の変速が実行されるように油圧制御回路72内のシフト弁を駆動するシフトソレノイドを作動させて、その変速に関与する油圧式摩擦係合装置の油圧アクチュエータを作動させる。
【0042】
図4の変速線図は、車速V及びスロットル弁開度θTHを変数とする二次元座標において変速段が判断される為の複数の領域を定める境界線としてのアップシフト用変速線とダウンシフト用変速線とをそれぞれ有する予め記憶された関係(変速マップ)である。図4において、実線はアップシフトが判断されるためのアップシフト用変速線であり、破線はダウンシフトが判断されるためのダウンシフト用変速線である。これらアップシフト用変速線及びダウンシフト用変速線は、同じ変速段間のアップシフトとダウンシフトとが短時間に繰り返し行われる変速ハンチングを防止するための所謂ヒステリシスを有するように、例えばn速と(n+1)速との間の変速線においては、ダウンシフト用変速線(n←(n+1)変速線)の方がアップシフト用変速線(n→(n+1)変速線)よりも低車速側或いは高アクセル開度側に設定されている。また、各変速線は、実際のスロットル弁開度θTH(%)を示す横線上において実際の車速Vが線を横切ったか否かすなわち変速線上の変速を実行すべき値(変速点車速)を越えたか否かを判断するためのものであり、この変速点車速の連なりとして予め記憶されている。
【0043】
従って、この変速制御では、車速Vが上昇したり、或いはアクセルペダル52の戻し操作が行われてスロットル弁開度θTHが小さくなったときには、アップシフト用変速線を高車速側へ横切ることに基づいてアップシフトが判定され、それまでの変速段からそれよりも高速側の変速段となるように自動変速機16がアップシフトされる。また、車速Vが低下したり、或いはアクセルペダル52の踏込み操作が行われてスロットル弁開度θTHが大きくなったときには、ダウンシフト用変速線を低車速側へ横切ることに基づいてダウンシフトが判定され、それまでの変速段からそれよりも低速側の変速段となるように自動変速機16がダウンシフトされる。
【0044】
例えば車両状態が1速→2速アップシフト用変速線と2速→3速アップシフト用変速線とで定められる領域R2Uに位置してその領域R2Uに対応する第2変速段にてアクセルオンのパワーオン走行中に、車速Vが上昇したことにより車両状態が2速→3速アップシフト用変速線を横切ったときには、第3変速段への2速→3速アップシフトを判断し、その第3変速段が得られるようにブレーキB3を解放させると共にクラッチC0及びブレーキB2を係合させる指令を油圧制御回路72に出力する。そして、油圧制御回路72によりブレーキB3の油圧アクチュエータの解放過渡油圧とクラッチC0及びブレーキB2の各油圧アクチュエータの係合過渡油圧とが調圧制御される。
【0045】
ここで、自動変速機16の変速制御にかかわる制御定数は、例えば変速の際に発生する変速ショックの抑制と変速応答性とを両立させるために、自動変速機16の変速に関与する油圧式摩擦係合装置の過渡油圧が適切に制御されるように予め設定される。以下に示す図5の車両用自動運転システム100は、その制御定数の調整すなわち適合を、正確かつ効率的に行うことが出来るようにするための油圧適合支援装置である。
【0046】
図5は、車両90の走行を試行するためのシャーシダイナモメータ92と、本発明が好適に適用される車両用自動運転システム100とを示している。シャーシダイナモメータ92は、車両90の駆動輪82を乗せる4本のローラ94と、そのローラ94に機械的に連結されそのローラ94に負荷を与える負荷装置96と、車両90の電子制御装置80に接続されて車両のアクセル開度Acc等の操作を制御するとともにその負荷装置96の負荷を制御するダイナモ制御装置98とを備え、実際の走行状態と同じ走行状態となるように予め設定された走行パターンに従って車両90を走行させるとともに、予め設定された実験計画に従う車両用自動運転システム100からの指令に従って車両90の自動変速機16の変速を発生させる。
【0047】
車両用自動運転システム100は、例えば電子制御装置80と同様に所謂CPU、ROM、RAM等を含み予め記憶されたプログラムに従って入力信号を処理するコンピュータ(電子制御装置)112、及び磁気テープ、光磁気ディスク、半導体メモリ等の外部的な記憶装置114を含んで構成された装置本体110と、二次元平面において文字、記号、画像を表示可能な画像表示装置120と、装置本体110に接続されたキーボード、マウス、画像表示装置120に一体に設けられたタッチパネル等の入力操作装置130と、車両90の電子制御装置80及び車両90に設けられた不図示のセンサを含む各センサ等と装置本体110との間に設けられた入出力インターフェイス140とを備え、例えば予め設定された計測対象の複数の対象変速を順に行わせる為の予め設定された運転パターンDPに従って自動変速機16を作動させてそれら変速が行われたときの車両状態を計測する。例えば、自動変速機16の変速制御の制御定数を複数段階で変化させたときに運転パターンDPに従って作動させた自動変速機16のそれぞれの変速時に得られる車両状態、例えば車両90の加速度波形、自動変速機16の変速を制御する油圧式摩擦係合装置の油圧波形、その油圧式摩擦係合装置への油圧を制御する油圧制御回路72内のシフトソレノイドに対する駆動電流波形(油圧指示波形、油圧指令値)Wなどの複数の変速波形を計測すると共に、それら複数種類の変速波形とそれが発生したときの制御定数等とをそれぞれ対応させたデータマップを構成し、それを記憶装置114に記憶する。
【0048】
尚、シャーシダイナモメータ92と車両用自動運転システム100とが別々の場所に独立して設置され、そのシャーシダイナモメータ92により得られた上記データマップが通信回線或いは記憶媒体を介して記憶装置114に記憶されてもよい。ここで、本実施例において、上記制御定数とは、上記駆動電流波形Wを特徴づける、例えばその駆動電流波形Wの所定区間の傾きや所定時点における変動値等の値でもある。
【0049】
ところで、運転パターンDPはユーザ(実験者、計測者等)が作成したものが設定されても良いが、車両用自動運転システム100において対象変速の一通りを可及的に短い時間で実行することができるすなわち可及的に短い時間でそれら変速時の車両状態を計測することができる最適運転パターンDPBを迅速に作成することは困難である可能性がある。そこで、本実施例のコンピュータ112は、最適運転パターンDPBを迅速に作成する運転パターン作成手段150を機能的に備え、この作成された最適運転パターンDPBを車両用自動運転システム100において自動変速機16を作動させるための運転パターンDPとして設定する。このように、コンピュータ112は、車両用自動運転システムにおける運転パターン設定装置でもある。
【0050】
図6は、コンピュータ112による制御機能の要部を説明する機能ブロック線図である。図6において、運転パターン作成手段150は、例えば受付手段152とプロット手段154と順列設定手段156と変速間所要時間算出手段158と合計時間算出手段160と運転パターン選択手段162とを備え、複数の対象変速の何れをも順に行わせたときの所要時間が可及的に短くなるように前記図4に示したような変速マップにおける対象変速間の車速V方向の距離に基づいて最適運転パターンDPBを作成する。
【0051】
より具体的には、受付手段152は、手動操作に応答して対象変速を受け付ける、例えば入力操作装置130を介して対象変速をユーザから受け付ける。例えば、受付手段152は、アップシフトの場合には1→2アップシフトや2→3アップシフト等の変速の種類及びスロットル弁開度θTHが設定されることで対象変速を受け付け、ダウンシフトの場合には3→2ダウンシフトや4→3ダウンシフト等の変速の種類、車速V、スロットル弁開度θTH、スロットル弁開度θTHの変化率に相当するアクセルペダル52の踏み方、及び駆動状態/被駆動状態が設定されることで対象変速を受け付ける。
【0052】
以下に、対象変速の受付例を示す。
対象変速A:1→2アップシフト、θTH=20%
対象変速B:2→3アップシフト、θTH=20%
対象変速C:3→2ダウンシフト、V=20km/h、被駆動状態からの早踏み
対象変速D:4→3ダウンシフト、V=40km/h、被駆動状態からの早踏み
対象変速E:3→4アップシフト、θTH=50%
【0053】
尚、上記ダウンシフトのスロットル弁開度θTHについては、ここでは被駆動状態からの早踏みとしてθTH=→100%とする。このように、ダウンシフトの場合、変速の種類、車速V、スロットル弁開度θTH、アクセルペダル52の踏み方、及び駆動状態/被駆動状態はそれぞれ関連性があるので、ユーザが設定を進める中で、残りのパラメータを自動的に制限することができる。他の例としては、被駆動状態からのダウンシフトを設定すると図7に示すようにダウンシフト可能な車速範囲が制限されるので、ユーザはその車速範囲内で車速Vを設定する必要がある。反対に、駆動状態からのダウンシフトであると、変速前後のスロットル弁開度θTHをユーザに設定させる必要がある。
【0054】
プロット手段154は、自動変速機16用の変速マップが有する変速線(アップシフト用変速線、ダウンシフト用変速線)上における対象変速の位置を決める。つまり、受付手段152により受け付けられた対象変速の設定を元に、変速線上にそれら対象変速をプロットする。例えば、図7の変速マップに示すように、上記対象変速A〜Eが変速線上にプロットされる。従って、プロット手段154により対象変速が変速線上にプロット可能なように、受付手段152により対象変速の設定が受け付けられているという見方もできる。
【0055】
ここで、運転パターンDPは、変速線上にプロットされた全ての対象変速を含む変速マップ上の線をなぞるものであると見ることができる。この際、それぞれの対象変速間を直線で結ぶものであっても良いが、本実施例では図7の変速マップ上の一点鎖線に示すように、座標軸に平行となる直線によりそれぞれの対象変速間を結ぶものとする。
【0056】
そして、本実施例では、対象変速を一通り実行させる順列を替えた複数の運転パターンDPの中から、変速マップにおける対象変速間の車速V方向の距離に基づいてそれら対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンDPBを作成するのである。この際、各対象変速の順列を替えた全ての運転パターンDPを最適運転パターンDPB候補としても良い。
【0057】
しかし、対象変速の中でスロットル弁開度θTHが同等となるアップシフトについては、運転パターンDPにおいて連続させた方が連続させない場合に比較して上記所要時間が短くなると考えられる。すなわち同等開度のスロットル弁開度θTHは車両用自動運転システム100において一度に計測するのが効率的であると考えられる。このようなことから、受け付けられた対象変速の中でスロットル弁開度θTHが同等となるアップシフトがある場合には、スロットル弁開度θTHが同等となるアップシフトを連続させた運転パターンDPを最適運転パターンDPB候補とする。従って、スロットル弁開度θTHが同等となるアップシフトがある場合には、スロットル弁開度θTHが同等となるアップシフトを連続させない運転パターンDPは当初から最適運転パターンDPB候補から除外される。尚、スロットル弁開度θTHが同等となるアップシフトにおいては、車速Vの上昇によってアップシフトが判断されるので、より低速ギヤ段間の対象変速から先に実行される。
【0058】
また、本実施例では、運転パターンDPは、車速V及びスロットル弁開度θTHが零となる変速マップ上の原点を始点として対象変速が順に行われるように設定される。そうすると、スロットル弁開度θTHがより低開度に設定されたアップシフトについては、運転パターンDPにおいて最初に実行させた方が最初に実行させない場合に比較して上記所要時間が短くなると考えられる。このようなことから、受け付けられた対象変速の中でアップシフトがある場合には、スロットル弁開度θTHがより低開度に設定されたアップシフトを最初に実行させた運転パターンDPを最適運転パターンDPB候補とする。従って、アップシフトがある場合には、スロットル弁開度θTHがより低開度に設定されたアップシフト以外の対象変速を最初に実行させる運転パターンDPは当初から最適運転パターンDPB候補から除外される。
【0059】
そこで、順列設定手段156は、受付手段152により受け付けられた対象変速の中でスロットル弁開度θTHが同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように最適運転パターンDPB候補における対象変速の順列を設定させる。つまり、スロットル弁開度θTHが同等となるアップシフトを一連の変速とする。例えば、上記対象変速A、Bはスロットル弁開度θTHが同開度(20%)のアップシフトであるので、対象変速A、Bが連続して変速されるように対象変速A、Bを一連の変速として取り扱う。尚、対象変速Aの方がより低速ギヤ段間の対象変速であるので、この一連の変速においては対象変速Aが先に実行される順に設定される。尚、スロットル弁開度θTHが同等(同程度)とは、設定されたスロットル弁開度θTHが同開度であるのはもちろんのこと、例えば±5%や±10%以内に入っている場合も含んで良い。
【0060】
また、順列設定手段156は、受付手段152により受け付けられた対象変速の中でスロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に実行されるように最適運転パターンDPB候補における対象変速の順列を設定させる。例えば、アップシフトである対象変速A、B、Eの中でより低開度に設定された対象変速A、Bの何れかが最初に実行されるように最適運転パターンDPB候補が設定される。尚、対象変速A、Bはここでは一連の変速として取り扱われるので、実質的には変速マップの原点からスタートして対象変速Aが最初に実行され、続いて対象変速Bが実行されるように最適運転パターンDPB候補が設定される。以下、この一連の変速順を変速順0ABと表す。また他の変速順についても、同様に表す。例えば、対象変速Bに続いて対象変速Cが実行される変速順は変速順BCと表し、対象変速Dに続いて対象変速Cが実行される変速順は変速順DCと表す。
【0061】
変速間所要時間算出手段158は、プロット手段154により決められた変速線上における対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離を何れをも取得し、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間を算出する。つまり、各変速順の変速マップにおける車速V方向の距離を取得し、その距離に基づいて各変速順の所要時間を算出する。変速間所要時間算出手段158は、例えばスロットル弁開度θTHに基づく加減速度から次の対象変速で設定された車速Vを得る為の時間を所定の運動方程式から求めることで、取得した距離に基づいた所要時間を算出する。例えば、図7に示すように、対象変速A〜Eにおける各変速順の距離(矢印の長さ)が取得され、それら距離がそれぞれ各変速順の所要時間に換算される。
【0062】
例えば、変速順0AB(一点鎖線0AB参照)においては、0からθTH=20%での2→3アップシフト用変速線における変速点車速までの距離0ABが取得され、θTH=20%で変速点車速に到達するまでの所要時間(6.2sec)が算出される。この変速順0ABでは、スロットル弁開度θTHを原点から20%まで増大させる時間は所要時間には含めていない。これは、スロットル弁開度θTHは瞬時に増大させることができるという考えからである。他の変速順においても基本的には同様であるが、アクセルペダル52の踏み方が早踏みでない場合(例えばゆっくり、遅踏み、中踏みなど)には、踏み方に応じた所定の時間を所要時間に加えるようにしても良い。また、スロットル弁開度θTHを減少させる場合も同様に所要時間には含めない。
【0063】
また、変速順BC、ED、DC、ECにおいては、被駆動状態でのダウンシフトであることから惰性走行により設定された車速に減速するまでの所要時間が算出される。
【0064】
また、変速順CD(一点鎖線CD参照)や変速順BD(一点鎖線BD参照)においては、低車速側から車速Vを上昇させた後の被駆動状態からのダウンシフトであることから、車速Vを設定よりも一旦上昇させてから惰性走行により設定された車速に減速する必要がある。図7に示した距離CDや距離BDにそれぞれ加えたtdwはそのための時間である。また、この場合は、設定よりも一旦上昇するように単純に車速Vを上げるだけでよいのでスロットル弁開度θTHが決定できない。そこで、例えば一律θTH=50%(一点鎖線CD参照)としたり、定常走行できる最低スロットル弁開度(ロードロードに相応するスロットル弁開度)を所定値増大させたスロットル弁開度(一点鎖線BD参照)としたりする。
【0065】
尚、前述したように本実施例では変速順0ABが最初に実行される一連の変速として取り扱われるので、例えば変速順CA、変速順CB、変速順DAなどの対象変速Aや対象変速Bへの順序となる変速順は初めから距離が取得されないし、もちろん所要時間も算出されない。
【0066】
合計時間算出手段160は、受付手段152により受け付けられた対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に変速間所要時間算出手段158により算出された各変速順の所要時間をそれぞれ加算した合計所要時間を算出する。図8は、本実施例での最適運転パターンDPB候補を列記したものであり、各運転パターンDP毎における合計所要時間を示す図表である。例えば、運転パターンDP1は対象変速A、対象変速B、対象変速C、対象変速D、対象変速Eの順に変速が実行される運転パターンDPであり、変速順0AB(6.2sec)、変速順BC(2.5sec)、変速順CD(7.5sec)、変速順DE(4.3sec)の各所要時間が加算されて運転パターンDP1における合計所要時間(20.5sec)が算出される。他の運転パターンDP2、3、4、5、6についても同様にそれぞれの合計所要時間が算出される。
【0067】
運転パターン選択手段162は、合計時間算出手段160により算出された合計所要時間が最短となる最適運転パターンDPB候補を最適運転パターンDPBとして選択する。例えば、運転パターンDP1〜6の中から合計所要時間が最短となる運転パターンDP6が選択される。
【0068】
図9は、コンピュータ112の制御作動の要部すなわち対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンDPBを作成する為の制御作動を説明するフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0069】
図9において、先ず、受付手段152に対応するステップ(以下、ステップを省略する)S10において、例えば入力操作装置130を介して対象変速がユーザから受け付けられる。例えば、前記対象変速A〜Eが受け付けられる。次いで、プロット手段154に対応するS20において、変速マップの変速線上における対象変速の位置が決められる。つまり、前記S10において受け付けられた対象変速の設定を元に、変速線上にそれら対象変速がプロットされる。例えば、図7の変速マップに示すように、上記対象変速A〜Eが変速線上にプロットされる。
【0070】
次いで、順列設定手段156に対応するS30において、前記S10において受け付けられた対象変速の中でスロットル弁開度θTHが同程度開度となるアップシフトが複数ある場合は、それらアップシフト群が連続するように最適運転パターンDPB候補における対象変速の順列が設定される。つまり、スロットル弁開度θTHが同程度開度となるアップシフトがグルーピングされる。例えば、上記対象変速A、Bはスロットル弁開度θTHが同開度(20%)のアップシフトであるので、対象変速A、Bがグルーピングされる。また、このS30では、前記S10において受け付けられた対象変速の中でスロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に実行されるように最適運転パターンDPB候補における対象変速の順列が設定される。例えば、グルーピングされた対象変速A、Bと対象変速Eとでは、対象変速A、Bの方がより低開度に設定されているので、変速マップの原点からスタートして対象変速A、Bが実行されるように最適運転パターンDPB候補が設定される。
【0071】
次いで、変速間所要時間算出手段158に対応するS40において、前記S20においてプロットされた変速線上における対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間が算出される。例えば、図7に示すように、対象変速A〜Eにおける各変速順の距離が取得され、それら距離がそれぞれ各変速順の所要時間に換算される。
【0072】
次いで、合計時間算出手段160及び運転パターン選択手段162に対応するS50において、前記S10において受け付けられた対象変速を何れも含むその対象変速の順列で設定された運転パターン毎に前記S40において算出された各変速順の所要時間をそれぞれ加算した合計所要時間が算出される。例えば、図8の図表に示すように対象変速A〜Eに基づいた各運転パターンDP1〜6毎における合計所要時間がそれぞれ算出される。そして、ここで算出された合計所要時間が最短となる最適運転パターンDPB候補が最適運転パターンDPBとして選択される。例えば、運転パターンDP1〜6の中から合計所要時間が最短となる運転パターンDP6が選択される。
【0073】
上述のように、本実施例によれば、運転パターン作成手段150により、計測対象となる複数の対象変速を一通り順に行わせたときの所要時間が可及的に短くなるように変速マップにおけるその対象変速間の車速V方向の距離に基づいて最適運転パターンDPBが作成されるので、車両用自動運転システム100において対象変速の一通りを可及的に短い時間で計測することができるすなわち可及的に短い時間でそれら変速時の車両状態を計測することができる最適運転パターンDPBが迅速に作成される。
【0074】
また、本実施例によれば、運転パターン作成手段150は受付手段152とプロット手段154と変速間所要時間算出手段158と合計時間算出手段160と運転パターン選択手段162とを備えており、受付手段152により対象変速が受け付けられ、プロット手段154により変速線上における対象変速の位置が決められ、変速間所要時間算出手段158により変速線上の対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいてその対象変速を順に行わせたときのその対象変速間における所要時間が算出され、合計時間算出手段160により対象変速を何れも含むその対象変速の順列で設定された運転パターンDP毎に所要時間を加算した合計所要時間が算出され、運転パターン選択手段162により合計所要時間が最短となる運転パターンDPが最適運転パターンDPBとして選択されるので、最適運転パターンDPBが適切且つ迅速に作成される。
【0075】
また、本実施例によれば、変速間所要時間算出手段158は、スロットル弁開度θTHに基づく加減速度から車速Vを得る為の時間を求めることで、取得した距離に基づいて所要時間を算出するので、取得された距離に基づく所要時間が適切に算出され、結果として最適運転パターンDPBが適切に作成される。
【0076】
また、本実施例によれば、受付手段152は、アップシフトの場合には1→2変速や2→3変速等の変速の種類及びスロットル弁開度θTHが設定されることで対象変速を受け付け、ダウンシフトの場合には3→2変速や2→1変速等の変速の種類、車速V、スロットル弁開度θTH、アクセルペダル52の踏み方、及び駆動状態/被駆動状態が設定されることで対象変速を受け付けるので、計測対象となる対象変速が運転パターンDPに適切に反映され、車両用自動運転システム100においてその運転パターンDPに従って変速時の車両状態が適切に計測される。
【0077】
また、本実施例によれば、対象変速の中でスロットル弁開度θTHが同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように運転パターンDPにおけるその対象変速の順列を設定させる順列設定手段が更に備えられるので、スロットル弁開度θTHが同等となるアップシフト群が連続して行われる運転パターンDPに比較して合計所要時間が長くなるようなアップシフト群が連続しない運転パターンDPが最適運転パターンDPB候補として初めから作成されない。よって、最適運転パターンDPBが適切且つ一層迅速に作成される。
【0078】
また、本実施例によれば、運転パターンDPは車速V及びスロットル弁開度θTHが零となる変速マップ上の原点を始点として対象変速が順に行われるように設定されるものであり、スロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に実行されるように運転パターンDPにおける対象変速の順列を設定させる順列設定手段が更に備えられるので、運転パターンDPが変速マップ上の原点を始点として対象変速が順に行われる場合には、スロットル弁開度θTHがより低開度に設定されたアップシフトの対象変速が最初に行われる運転パターンDPに比較して合計所要時間が長くなるようなアップシフトの対象変速が最初に行われない運転パターンDPが最適運転パターンDPB候補として初めから作成されない。よって、最適運転パターンDPBが適切且つ一層迅速に作成される。
【0079】
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
【0080】
例えば、前述の実施例では、運転パターンDPは、車速V及びスロットル弁開度θTHが零となる変速マップ上の原点を始点として対象変速が順に行われるように設定されたが、必ずしも変速マップ上の原点を始点とする必要はない。例えば、少なくとも車速Vが零となる変速マップ上の点を始点としても良い。
【0081】
また、前述の実施例では、低車速側から車速Vを上昇させた後の被駆動状態からのダウンシフトである場合にはtdwを加えて所定時間を算出したが、低車速側から車速Vを上昇させた後のダウンシフトである場合でも駆動状態からのダウンシフトでは所定時間の算出の際にtdwを加える必要はない。
【0082】
また、車両用自動運転システム100において計測対象となる車両90が複数あるような場合には、計測対象となる車両90の諸元例えば変速マップ等を計測の都度ユーザが入力操作装置130を介して入力するようにしても良い。このようにすれば、より多くの車両を計測対象とすることができる。
【0083】
なお、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0084】
【図1】本発明の適用対象となる車両の動力伝達装置の概略構成を例示する骨子図である。
【図2】図1の車両用自動変速機の複数の変速段を成立させる際の油圧式摩擦係合装置の作動の組み合わせを例示する作動図表である。
【図3】図1の動力伝達装置などを制御するために車両に設けられた電気的な制御系統の要部を例示するブロック線図である。
【図4】図1の車両用自動変速機の変速制御において用いられる変速線図の一例を示す図である。
【図5】本発明が好適に適用される車両用自動運転システムを、実際の走行状態と同じ走行状態となるように車両を走行させるシャーシダイナモメータと共に例示する図である。
【図6】車両用自動運転システムのコンピュータによる制御機能の要部を説明する機能ブロック線図である。
【図7】変速マップの変速線上にプロットされた対象変速を例示すると共に、対象変速間の距離や取得した距離に基づいた所要時間などを例示する図である。
【図8】本実施例での最適運転パターン候補を列記したものであり、各運転パターン毎における合計所要時間を示す図表である。
【図9】車両用自動運転システムのコンピュータの制御作動の要部すなわち対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンを作成する為の制御作動を説明するフローチャートである。
【符号の説明】
【0085】
16:車両用自動変速機
100:車両用自動運転システム
112:コンピュータ(運転パターン設定装置)
150:運転パターン作成手段
152:受付手段
154:プロット手段
156:順列設定手段
158:変速間所要時間算出手段
160:合計時間算出手段
162:運転パターン選択手段
DP:運転パターン
DPB:最適運転パターン
【特許請求の範囲】
【請求項1】
少なくとも車速関連値を変数として変速段が判断される為の複数の変速線を有する予め記憶された関係に基づいて自動変速が行われる車両用自動変速機を予め設定された計測対象の対象変速を順に行わせる為の予め設定された運転パターンに従って作動させて該対象変速が行われたときの車両状態を計測する車両用自動運転システムにおける運転パターン設定装置であって、
前記複数の対象変速の何れをも順に行わせたときの所要時間が可及的に短くなるように前記予め記憶された関係における該対象変速間の車速関連値方向の距離に基づいて前記運転パターンを作成する運転パターン作成手段を備えることを特徴とする運転パターン設定装置。
【請求項2】
前記運転パターン作成手段は、
手動操作に応答して前記対象変速を受け付ける受付手段と、
前記変速線上における前記対象変速の位置を決めるプロット手段と、
前記変速線上の位置に基づいて前記予め記憶された関係における前記対象変速間の車速関連値方向の距離を何れをも取得し、該距離に基づいて該対象変速を順に行わせたときの該対象変速間における所要時間を算出する変速間所要時間算出手段と、
前記対象変速を何れも含む該対象変速の順列で設定された運転パターン毎に前記所要時間を加算した合計所要時間を算出する合計時間算出手段と、
前記合計所要時間が最短となる運転パターンを最適運転パターンとして選択する運転パターン選択手段と
を、備えることを特徴とする請求項1に記載の運転パターン設定装置。
【請求項3】
前記予め記憶された関係は、前記車速関連値及びスロットル弁開度関連値を変数とするものであり、
前記変速間所要時間算出手段は、前記スロットル弁開度関連値に基づく加減速度から前記車速関連値を得る為の時間を求めることで、前記取得した距離に基づいて前記所要時間を算出するものであることを特徴とする請求項2に記載の運転パターン設定装置。
【請求項4】
前記受付手段は、
アップシフトの場合には変速の種類及び前記スロットル弁開度関連値が設定されることで前記対象変速を受け付け、
ダウンシフトの場合には変速の種類、前記車速関連値、前記スロットル弁開度関連値、前記スロットル弁開度関連値の変化率相当値、及び駆動状態/被駆動状態が設定されることで前記対象変速を受け付けることを特徴とする請求項3に記載の運転パターン設定装置。
【請求項5】
前記対象変速の中で前記スロットル弁開度関連値が同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように前記運転パターンにおける該対象変速の順列を設定させる順列設定手段を更に備えることを特徴とする請求項3または4に記載の運転パターン設定装置。
【請求項6】
前記運転パターンは、前記車速関連値及びスロットル弁開度関連値が零となる前記予め記憶された関係上の原点を始点として前記対象変速が順に行われるように設定されるものであり、
前記スロットル弁開度関連値がより低開度に設定されたアップシフトの対象変速が最初に実行されるように前記運転パターンにおける前記対象変速の順列を設定させる順列設定手段を更に備えることを特徴とする請求項3または4に記載の運転パターン設定装置。
【請求項1】
少なくとも車速関連値を変数として変速段が判断される為の複数の変速線を有する予め記憶された関係に基づいて自動変速が行われる車両用自動変速機を予め設定された計測対象の対象変速を順に行わせる為の予め設定された運転パターンに従って作動させて該対象変速が行われたときの車両状態を計測する車両用自動運転システムにおける運転パターン設定装置であって、
前記複数の対象変速の何れをも順に行わせたときの所要時間が可及的に短くなるように前記予め記憶された関係における該対象変速間の車速関連値方向の距離に基づいて前記運転パターンを作成する運転パターン作成手段を備えることを特徴とする運転パターン設定装置。
【請求項2】
前記運転パターン作成手段は、
手動操作に応答して前記対象変速を受け付ける受付手段と、
前記変速線上における前記対象変速の位置を決めるプロット手段と、
前記変速線上の位置に基づいて前記予め記憶された関係における前記対象変速間の車速関連値方向の距離を何れをも取得し、該距離に基づいて該対象変速を順に行わせたときの該対象変速間における所要時間を算出する変速間所要時間算出手段と、
前記対象変速を何れも含む該対象変速の順列で設定された運転パターン毎に前記所要時間を加算した合計所要時間を算出する合計時間算出手段と、
前記合計所要時間が最短となる運転パターンを最適運転パターンとして選択する運転パターン選択手段と
を、備えることを特徴とする請求項1に記載の運転パターン設定装置。
【請求項3】
前記予め記憶された関係は、前記車速関連値及びスロットル弁開度関連値を変数とするものであり、
前記変速間所要時間算出手段は、前記スロットル弁開度関連値に基づく加減速度から前記車速関連値を得る為の時間を求めることで、前記取得した距離に基づいて前記所要時間を算出するものであることを特徴とする請求項2に記載の運転パターン設定装置。
【請求項4】
前記受付手段は、
アップシフトの場合には変速の種類及び前記スロットル弁開度関連値が設定されることで前記対象変速を受け付け、
ダウンシフトの場合には変速の種類、前記車速関連値、前記スロットル弁開度関連値、前記スロットル弁開度関連値の変化率相当値、及び駆動状態/被駆動状態が設定されることで前記対象変速を受け付けることを特徴とする請求項3に記載の運転パターン設定装置。
【請求項5】
前記対象変速の中で前記スロットル弁開度関連値が同等となるアップシフトが複数ある場合は、それらアップシフト群が連続するように前記運転パターンにおける該対象変速の順列を設定させる順列設定手段を更に備えることを特徴とする請求項3または4に記載の運転パターン設定装置。
【請求項6】
前記運転パターンは、前記車速関連値及びスロットル弁開度関連値が零となる前記予め記憶された関係上の原点を始点として前記対象変速が順に行われるように設定されるものであり、
前記スロットル弁開度関連値がより低開度に設定されたアップシフトの対象変速が最初に実行されるように前記運転パターンにおける前記対象変速の順列を設定させる順列設定手段を更に備えることを特徴とする請求項3または4に記載の運転パターン設定装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−14555(P2010−14555A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2008−175002(P2008−175002)
【出願日】平成20年7月3日(2008.7.3)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成20年7月3日(2008.7.3)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]