
運転席方向可変車両の制動装置
【課題】運転席方向可変車両の運転方向が何れ方向であっても、前後輪制動力配分が、後輪先ロック防止と、十分な車両減速度の発生とを両立させ得るものになるようにする。
【解決手段】S21で、ブレーキペダル踏み込み量Lbおよび運転席の向きを検出し、S22で、運転席の向きに応じた理想制動力配分特性に基づき目標前後制動力配分を算出する。S24で車体の走行方向一方側(A側)が車両前方となる運転方向であると判定するとき、S25において制動力配分を、S22で求めた目標制動力配分となすよう、つまりA側車輪(前輪)の制動力の方が反対側B側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。S24でB側が車両前方となる運転方向であると判定するとき、S26において制動力配分を、S22で求めた目標制動力配分となすよう、つまりB側車輪(前輪)の制動力の方がA側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。
【解決手段】S21で、ブレーキペダル踏み込み量Lbおよび運転席の向きを検出し、S22で、運転席の向きに応じた理想制動力配分特性に基づき目標前後制動力配分を算出する。S24で車体の走行方向一方側(A側)が車両前方となる運転方向であると判定するとき、S25において制動力配分を、S22で求めた目標制動力配分となすよう、つまりA側車輪(前輪)の制動力の方が反対側B側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。S24でB側が車両前方となる運転方向であると判定するとき、S26において制動力配分を、S22で求めた目標制動力配分となすよう、つまりB側車輪(前輪)の制動力の方がA側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪を懸架されて当該車輪の駆動および制動により走行および停止が可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両の制動装置に関するもので、特に当該制動装置の制動力配分制御技術に係わる。
【背景技術】
【0002】
車両の制動時は、車両前後方向への荷重移動により、進行方向前側車輪(前輪)の荷重が増加し、進行方向後側車輪(後輪)の荷重が減少する。
そのため、前後輪に同じ制動力を作用させると、輪荷重の小さな後輪が、輪荷重の大きな前輪よりも先にロックする傾向となる。
【0003】
前輪が先にロックした場合は、慣性方向後側の後輪が路面をグリップしているため、問題となるような車両の挙動不安定を生ずることはないが、
上記のように後輪が先に制動ロックして横力を十分に発生し得なくなると、慣性方向前側の前輪が路面をグリップしていることから、車両が前輪を中心とした旋回挙動を起こして挙動不安定になるという問題を生ずる。
【0004】
更に、前輪は輪荷重が大きいことから、更に大きな制動力をかけても未だロックすることがないのに、上記後輪先ロックの故に、未だ余裕のある前輪制動力を十分に使い切ることができず、車両全体としての制動力不足を生じ、運転者がブレーキ操作で期待した通りの車両減速度が得られないという問題も生ずる。
【0005】
上記の問題に鑑み通常は、先ロック傾向の後輪の制動力を前輪のそれよりも小さくする前後輪制動力配分制御を行い、これにより後輪の先ロック傾向を緩和して、後輪の先ロックによる挙動不安定を解消すると共に、かかる後輪先ロック傾向の緩和によって、輪荷重が大きくなる前輪の制動力を十分に使い切るようになすことで、運転者がブレーキ操作で期待した通りの車両減速度が得られるようにするのが普通である。
【0006】
しかし、上記のような前後輪制動力配分制御を行う場合、車両が後進するときに以下のような問題を生ずる。
つまり後進中の制動時は上記と逆に、後進方向前側の車輪(上記の後輪)が荷重移動により輪荷重を増大され、後進方向後側の車輪(上記の前輪)が荷重移動により輪荷重を低下されることから、後進方向前側車輪(後輪)に制動力の余裕が発生し、後進方向後側車輪(前輪)が先ロック傾向となる。
【0007】
それにもかかわらず前記の前後輪制動力配分制御により後進方向前側車輪(後輪)の制動力を後進方向後側車輪(前輪)の制動力よりも小さくするのでは、荷重移動に逆行するような前後輪制動力配分となって、
当該前後輪制動力配分制御を行わない場合よりも更に、後進方向後側車輪(前輪)の制動力過大による先ロック傾向(挙動不安定)の問題が顕著になると共に、後進方向前側車輪(後輪)の制動力を十分に使い切ることができないことで期待通りの車両減速度を得られないという問題が顕著になる。
【0008】
このような後進制動時の問題に鑑み従来、例えば特許文献1に記載のような技術が提案されている。
この提案技術は、車両の後進中に制動が行われた場合、後進方向前側車輪(後輪)の荷重増加に応じたモータ回生制動力を当該車輪に付加するようになし、これにより上記の問題を軽減しようとするものである。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−312943号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし上記した従来技術は、本発明が要旨構成の前提とするような運転席方向可変車両の制動装置に係わるものに非ず、運転席の向きが固定された車両の制動装置に係わるものであるし、
しかも上記した従来技術では、要求減速度が小さな制動時であって、大きなモータ回生制動力が得られる場合しか、しかも車両重心高とホイールベースとの比が小さくて制動時の荷重移動が少ない車両においてしか、上記の問題軽減を期待することができない。
【0011】
本発明が要旨構成の前提とする前記した型式の運転席方向可変車両は、車輪側車体から見たとき一方向走行と他方向走行とをほぼ同頻度で使用することを趣旨として運転席の向きを変え得るようにしたものであり、いずれ方向への走行時も大きな減速度が要求される制動を行うことがある。
【0012】
そのため、本発明が要旨構成の前提とする運転席方向可変車両に上記の従来技術を適用すると、前記の問題軽減を実現することができない。
以下にその理由を詳述する。
ブレーキ操作による要求減速度が大きくなると、進行方向前側の車輪では、荷重移動で増加した輪荷重を使い切る分だけの大きな制動力が必要なため、最大限のモータ回生制動力と、最大限の摩擦制動力が要求される。
【0013】
しかし、進行方向前側の車輪で最大限の摩擦制動力を出すようにした場合、逆方向への後進時は進行方向後側の車輪が制動力最大となって制動力配分が進行方向後寄りになることから、進行方向後側では進行方向前側以上の摩擦制動力を出すことになり、そのため進行方向後側の車輪がロックし易くなり、車両の挙動安定性を損なう虞がある。
【0014】
かといって、進行方向後側の車輪をロックさせずに車両の挙動安定性を確保しようとすると、後側の摩擦制動力の減少に伴って、前側の摩擦制動力もさらに減少するため、この減少分を補い得るほどに大きな回生制動力を発生可能な大型モータを搭載している場合以外は、十分な車両減速度を得られない虞がある。
【0015】
本発明は、上記の問題に鑑み、前記した型式の運転席方向可変車両において、運転席を走行方向一方側および走行方向他方側の何れ側に向けて走行する場合でも、確実に車両の挙動安定性と要求減速度の実現とを両立させ得るようにした運転席方向可変車両の制動装置を提案することを目的とする。
【課題を解決するための手段】
【0016】
この目的のため、本発明による運転席方向可変車両の制動装置は、以下のごとくにこれを構成する。
先ず、本発明の要旨構成の基礎前提となる運転席方向可変車両を説明するに、これは、
車輪を懸架されて該車輪の駆動および制動により走行および停止が可能な車輪側車体と、
運転席収容キャビンを有して運転席が少なくとも上記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう上記車輪側車体上に載置したキャビン側車体とより成るものである。
【0017】
本発明は、かかる運転席方向可変車両に対し、
上記運転席が上記車輪側車体の走行方向一方側および走行方向他方側のいずれ側に向いているのかを検出する運転席方向検知手段と、
上記車輪側車体の走行方向一方側に近い走行方向一方側車輪の制動力および上記車輪側車体の走行方向他方側に近い走行方向他方側車輪の制動力間における制動力配分を設定制動力配分となるよう制御しつつ上記車輪の制動を司る制動手段と、
上記運転席方向検知手段で検出した運転席の向きに応じて上記設定制動力配分を異ならせる設定制動力配分切り替え手段とを設けた構成に特徴づけられる。
【発明の効果】
【0018】
上記した本発明による運転席方向可変車両の制動装置にあっては、
制動手段が走行方向一方側車輪および走行方向他方側車輪間の制動力配分を制御するに際して目標とする設定制動力配分を、運転席の向きに応じて、つまり車両の走行方向に応じて異ならせるため、
運転席を走行方向一方側および走行方向他方側の何れ側に向けて走行する場合も、上記の制動力配分を、車両の挙動安定性と要求減速度の実現とが両立されるようなものとすることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の制動装置を適用可能な運転席方向可変車両の一例を示す概略平面図である。
【図2】図1における運転席方向可変車両の概略側面図である。
【図3】本発明の第1実施例になる制動装置を示す、ブレーキ液圧制御システム図である。
【図4】図1,2における運転席方向可変車両の運転席方向を制御するプログラムを示すフローチャートである。
【図5】図3におけるコントローラが実行する制動力配分制御のプログラムを示すフローチャートである。
【図6】運転席方向可変車両の走行方向に応じた理想制動力配分特性を、参考のため併記した50:50の制動力配分特性と共に示す特性線図である。
【図7】第1実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果とを、運転席方向可変車両が一方の方向へ走行する場合につき比較して示すもので、 (a)は、第1実施例の制動装置による制動力配分制御の制御結果を示す説明図、 (b)は、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果を示す比較例の説明図である。
【図8】図7(a)に示した第1実施例の制動装置による制動力配分制御の制御結果と、図7(b)に示した比較例による制動力配分制御の制御結果とを、同じ制動力配分特性線図上に併記して示す比較用特性線図である。
【図9】本発明の第2実施例になる制動装置の制動システムを示す、図3に対応する制動システム図である。
【図10】図9におけるコントローラが実行する制動力配分制御のプログラムを示す、図5に対応するフローチャートである。
【図11】第2実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における比較例の制動力配分制御結果とを、同じ制動力配分特性線図上に併記して示す比較用特性線図である。
【図12】第2実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果とを、運転席方向可変車両が一方の方向へ走行する場合につき比較して示すもので、 (a)は、第2実施例の制動装置による制動力配分制御の制御結果を示す説明図、 (b)は、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果を示す比較例の説明図である。
【図13】本発明の第3実施例になる制動装置が実行する制動力配分制御のプログラムを示す、図5,10に対応するフローチャートである。
【図14】第3実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における比較例の制動力配分制御結果とを、同じ制動力配分特性線図上に併記して示す比較用特性線図である。
【図15】第3実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果とを、運転席方向可変車両が一方の方向へ走行する場合につき比較して示すもので、 (a)は、第3実施例の制動装置による制動力配分制御の制御結果を示す説明図、 (b)は、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果を示す比較例の説明図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
<第1実施例>
図1,2はそれぞれ、本発明の制動装置を適用可能な運転席方向可変車両を例示し、図1は、その概略平面図、図2は、その概略側面図である。
【0021】
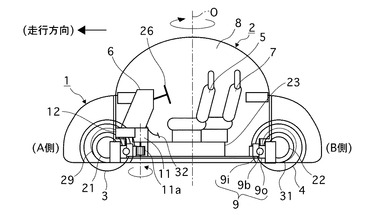
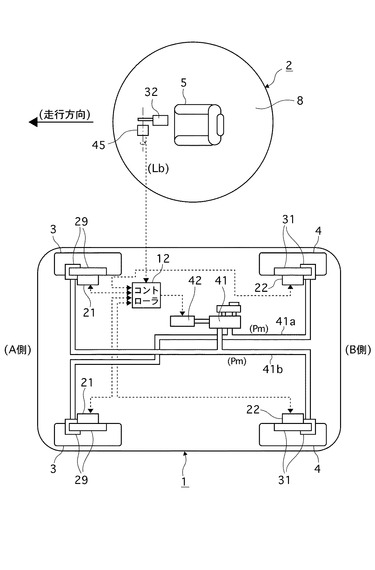
図1,2に示す運転席方向可変車両は、車輪側車体1およびキャビン側車体2により概ね構成する。
車輪側車体1は、該車輪側車体1の走行方向一方側に左右輪3をサスペンション装置3aにより懸架して具えると共に、該車輪側車体1の走行方向他方側に左右輪4をサスペンション装置4aにより懸架して具え、これら車輪3,4の駆動および制動により車輪側車体1は走行および停止が可能なものとする。
【0022】
キャビン側車体2は、運転席5、運転席前方のコクピットモジュール6、および運転席斜め後方における2個の乗員席7を収容したキャビン8を有するドーム形状とし、キャビン側車体2の中心鉛直線Oの周りに回転して転向し得るよう車輪側車体1上に載置する。
この載置に当たっては、車体1側に固設したアウターレース9oおよび車体2側に固設したインナーレース9i間にボール9bを介在させてなるボールベアリング型式の軸受9を用いる。
【0023】
キャビン側車体2の中心鉛直線Oの周りにおける回転は、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してこれを行うこととする。
【0024】
転向アクチュエータ11は、キャビン側車体2の回転位置を検出するキャビン側車体回転位置センサ(図示せず)を内蔵し、これからの信号および運転席方向指令スイッチ(図示せず)からの信号を基に、コクピットモジュール6に設けたコントローラ12が転向アクチュエータ11を駆動制御して、
キャビン側車体2の回転位置を、運転席が運転席方向指令スイッチからの指令通り車輪側車体1の走行方向一方側(図示のごとく車輪3の側)または走行方向他方側(図示とは反対における車輪4の側)に向く回転位置となし得るようにする。
【0025】
なおキャビン側車体2の回転量は、上記のように運転席の向きを相互反転できる量であれば任意であり、キャビン側車体2が180度だけ往復回転するものであっても、キャビン側車体2が360度に亘って回転するものであってもよい。
【0026】
車輪側車体1の走行および停止を司る車輪3,4の車輪駆動部および車輪制動部を以下に説明する。
【0027】
先ず車輪駆動部を説明するに、各車輪3,4に駆動結合して車輪駆動モータ21,22を設け、これらモータ21,22を車輪側車体1上に搭載する。
車輪駆動モータ21,22はそれぞれ、キャビン側車体2の床下に収納したバッテリ23からの電力をインバータおよびコントローラよりなる駆動制御ユニット24,25による制御下で供給されることにより駆動制御され、かかる車輪駆動モータ21,22の駆動制御により車輪側車体1およびキャビン側車体2(運転席方向可変車両)を走行可能にする。
なおバッテリ23からの電力は、キャビン側車体2の回転(転向)を司る転向アクチュエータ11の駆動にも供される。
【0028】
上記した運転席方向可変車両(車輪側車体1およびキャビン側車体2)の走行中における操舵は、
コクピットモジュール6に設けたステアリングホイール26からの操舵指令に応動して、同じくコクピットモジュール6に設けた前記コントローラ12がステアバイワイヤ式の操舵アクチュエータ27,28を介し、対応する車輪3,4を転舵することにより当該操舵を行うものとする。
【0029】
次に車輪制動部を説明するに、各車輪3,4に関連して車輪側車体1にドラムブレーキやディスクブレーキ等の摩擦制動ユニット29,31を設ける。
これら摩擦制動ユニット29,31による車輪3,4の摩擦制動は、コクピットモジュール6に設けたブレーキペダル32からの制動指令に応動して、同じくコクピットモジュール6に設けたコントローラ12が、ブレーキバイワイヤ式に摩擦制動ユニット29,31を液圧作動させることにより、対応する車輪3,4の当該摩擦制動を行うものとする。
【0030】
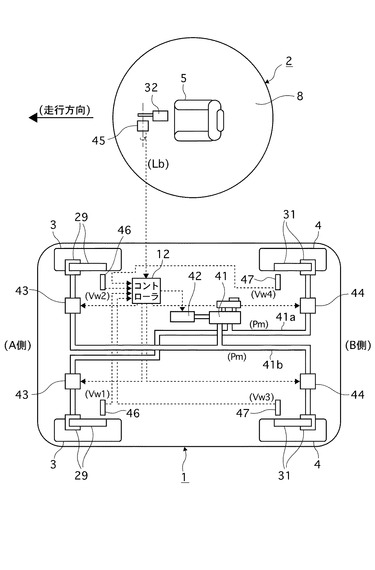
車輪3,4の摩擦制動システムは図3に示すごときもので、41はマスターシリンダを示す。
マスターシリンダ41は2系統液圧マスターシリンダとし、内蔵ピストンをマスターシリンダ駆動用リニヤアクチュエータ42により押し込まれるとき、一方のブレーキ液圧系41aおよび他方のブレーキ液圧系41bにそれぞれ、ピストン押し込み量に応じた同じマスターシリンダ液圧Pmを出力するものとする。
【0031】
一方のブレーキ液圧系41aは二分岐させて、左右輪3のうちの左車輪に係わる摩擦制動ユニット29および左右輪4のうちの右車輪に係わる摩擦制動ユニット31にそれぞれ接続し、
他方のブレーキ液圧系41bは二分岐させて、左右輪3のうちの右車輪に係わる摩擦制動ユニット29および左右輪4のうちの左車輪に係わる摩擦制動ユニット31にそれぞれ接続することにより、X配管式2系統液圧ブレーキシステムとなす。
【0032】
かかるX配管式2系統液圧ブレーキシステムに対し、左右輪3を個別に、また左右輪4を個別にブレーキ液圧制御するためのブレーキ液圧制御ユニット43,44を挿置し、
これら各ブレーキ液圧制御ユニット43,44は、各摩擦制動ユニット29,31とともに、全てを同仕様のものとし、ブレーキ液圧系41a,41bも全て同仕様のものとする。
各ブレーキ液圧制御ユニット43,44の作動制御、およびマスターシリンダ駆動用リニヤアクチュエータ42のストローク制御は、前記したコントローラ12によりこれらを実行するものとする。
【0033】
そのためコントローラ12には、
ブレーキペダル32の踏み込み量Lb(車両の要求減速度)を検出するブレーキペダル踏み込みセンサ45からの信号と、
左右輪3の回転速度Vw1,Vw2を個別に検出する車輪速センサ46からの信号と、
左右輪4の回転速度Vw3,Vw4を個別に検出する車輪速センサ47からの信号とをそれぞれ入力する。
【0034】
コントローラ12は、これら入力情報および内部情報を基に、以下のごとくに運転席方向制御および制動力配分制御を行う。
【0035】
<運転席方向制御>
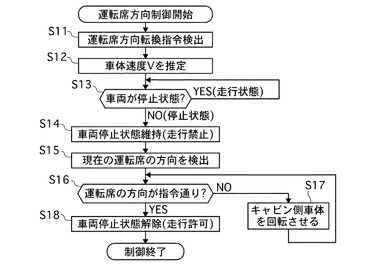
コントローラ12は、図4の制御プログラムを実行して運転席方向制御を遂行する。
ステップS11においては、前記した運転席方向指令スイッチからの信号を基に、運転者が運転席5の方向転換(走行方向転換)を指令したのを検出する。
運転席5の方向転換が指令されるまでは、ステップS11が実行されないから、ここで待機する。
【0036】
運転席5の方向転換が指令され、ステップS11が実行されたら、ステップS12において、車輪3,4の回転速度Vw1,Vw2,Vw3,Vw4を基に車体速度Vを推定する。
次のステップS13においては、上記推定した車体速度Vから運転席方向可変車両が停車状態か否かをチェックし、走行状態であればここで待機し、運転席5の方向転換指令によっても、運転席5の方向を現在の向きに保つ。
【0037】
ステップS13で運転席方向可変車両が停車状態であると判定した場合、ステップS14で車両を走行禁止により停車状態に保って、運転席の方向変更制御を以下の通りに行う。
ステップS15においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出する。
次のステップS16においては、検出した現在における運転席5の向きが、ステップS11で検出した運転席指令方向に一致するか否かをチェックする。
【0038】
ステップS16で現在における運転席5の向きが運転席指令方向に一致しないと判定する場合は、ステップS17においてキャビン側車体2を中心鉛直線Oの周りに回転させるべく転向アクチュエータ11を駆動する。
【0039】
転向アクチュエータ11の駆動によりキャビン側車体2を中心鉛直線Oの周りに回転されて、運転席5の向きが運転者の望む運転席指令方向に一致するとき、ステップS16がステップS17をバイパスして制御をステップS18へ進めるため、
転向アクチュエータ11の駆動が停止され、キャビン側車体2の回転位置を、運転席5の向きが運転者の望む運転席指令方向に一致した回転位置に保つことができる。
【0040】
ステップS18においては、ステップS14で実行した車両の走行禁止を解除して、車両の走行を許可し、上記の通り運転席5の向きが運転者の望む運転席指令方向に一致した状態での走行を可能にする。
【0041】
<制動力配分制御>
コントローラ12は、ブレーキペダル踏み込み量Lbに応じた量だけマスターシリンダ駆動用リニヤアクチュエータ42をストロークさせて、マスターシリンダ41から対応するマスターシリンダ液圧Pmを出力させると同時に、図5の制御プログラムを実行して制動力配分制御を遂行する。
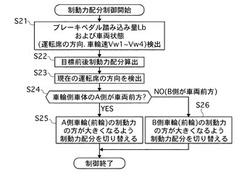
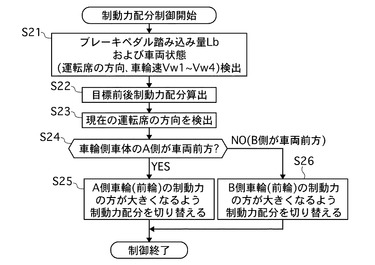
図5のステップS21においては、ブレーキペダル踏み込み量Lbおよび車両状態(図4により制御した運転席の向き、車輪3,4の回転速度Vw1,Vw2,Vw3,Vw4)を検出する。
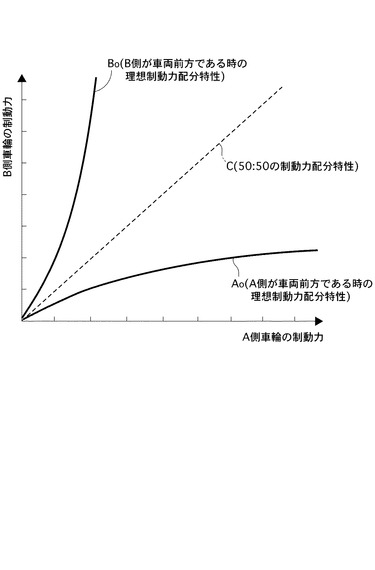
次のステップS22においては、現在における運転席の向きに応じて図6にAoまたはBoで示す理想制動力配分特性に基づき目標とすべき前後制動力配分を算出する。
【0042】
図6にAoで示す理想制動力配分特性は、運転者が運転席を図1〜3に示すごとく走行方向一方側(A側)に向け、車輪3が前輪となり、反対側(B側)の車輪4が後輪となるような方向へ走行する場合に、A側車輪(前輪)3およびB側車輪(後輪)4が同時にロックするようなA側車輪(前輪)3およびB側車輪(後輪)4間の制動力配分特性である。
また図6にBoで示す理想制動力配分特性は、運転者が運転席を図1〜3にB側として図示する走行方向他方側に向け、B側車輪4が前輪となり、A側車輪3が後輪となるような逆方向へ走行する場合に、B側車輪(前輪)4およびA側車輪(後輪)3が同時にロックするようなB側車輪(前輪)4およびA側車輪(後輪)3間の制動力配分特性である。
【0043】
従って理想制動力配分特性Ao,Boはそれぞれ、制動時における走行方向前方への荷重移動によっても、後輪先ロック傾向をなくして車両の挙動安定性を保つことができると共に、輪荷重の増大により大きくなる実現可能な前輪制動力を使い切って要求通りの車両減速度を発生させることができるものである。
かかる理想特性Ao,Bo上の前後輪理想制動力配分(走行方向前側となる車輪の前輪制動力Bf、および走行方向後側となる車輪の後輪制動力Br)は、
車両減速度をα(減速度を正とする)とし、重力の加速度をGとし、車両のホイールベースをLとし、車両の重心高をhとし、車両重量をWとし、走行方向前側となる車輪の静止時輪荷重をWfoとし、走行方向後側となる車輪の静止時時輪荷重をWroとしたとき、次式により求めることができる。
Bf=(α/G){Wfo+W・(α/G)・(h/L)} ・・・(1)
Br=(α/G){Wro−W・(α/G)・(h/L)} ・・・(2)
【0044】
なお、図6にCで示すA側車輪3およびB側車輪4間の制動力配分特性は、図3におけるブレーキ液圧制御ユニット43,44を非作動状態に保ち、両系統の同じマスターシリンダ液圧Pmをそのまま摩擦制動ユニット29,30に供給したり、ブレーキ液圧制御ユニット43,44を同じ作動状態にして摩擦制動ユニット29,30へのブレーキ液圧を同じにした場合における制動力配分特性、つまり50:50の制動力配分特性であり、参考までに示したものである。
かかる50:50の制動力配分特性に関し理想制動力配分特性Ao,Boは線対称な特性となること勿論である。
【0045】
図5のステップS22において、目標とすべき前後制動力配分を算出するに当たっては、
現在の運転席方向から走行方向一方側(A側)が前方である走行時か、走行方向他方側(B側)が前方である走行時かを判定し、
A側が前方である時は、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きい制動力配分を目標制動力配分とし、
B側が前方である時は、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きい制動力配分を目標制動力配分とする。
【0046】
ステップS23においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から、現在における運転席5の向きを検出する。
従ってステップS23は、本発明における運転席方向検知手段に相当する。
次のステップS24においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0047】
ステップS24で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS25において制動力配分を、ステップS22で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、図3のブレーキ液圧制御ユニット43,44を作動させる。
【0048】
ステップS24で車輪側車体1のA側が車両前方となる運転方向でない、つまり車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS26において制動力配分を、ステップS22で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、図3のブレーキ液圧制御ユニット43,44を作動させる。
【0049】
従ってステップS24は、本発明における設定制動力配分切り替え手段に相当し、ステップS25およびステップS26は、本発明における制動手段に相当する。
【0050】
<第1実施例の作用効果>
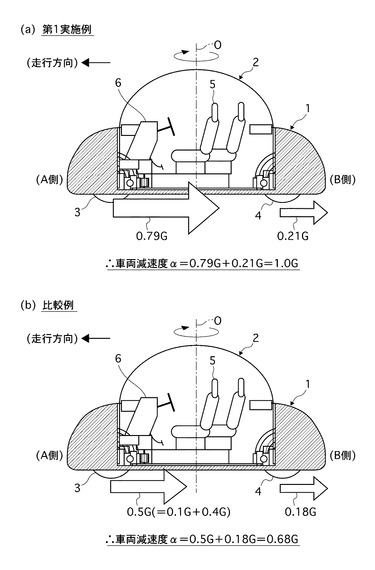
上記のような制動力配分制御によれば、図7(a),(b)に示すように走行方向前方を車輪側車体1のB側からA側へと切り替えて走行する場合につき、図7,8を用いて説明すると、以下のごとき定量的な作用効果を達成することができる。
【0051】
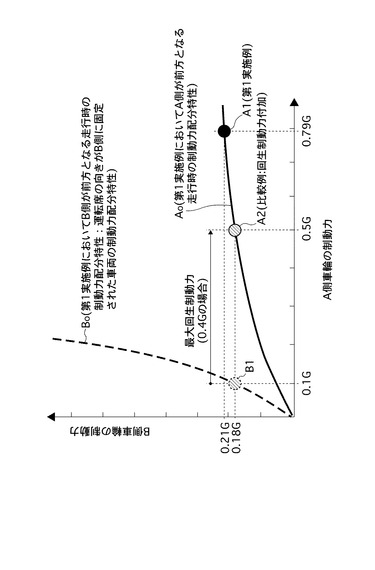
第1実施例においては、図7(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合、A側車輪3およびB側車輪4間の制動力配分は、図6の理想特性Boに対応する図8の制動力配分特性Bo上の制動力配分から、図6の理想特性Aoに対応する図8の制動力配分特性Ao上の制動力配分へと切り替わり、
例えば図8の制動力配分特性Ao上のA1点における制動力配分となって、図7(a)に示すごとくA側車輪3では0.79Gの制動力が発生し、B側車輪4では0.21Gの制動力が発生するように切り替わる。
【0052】
かかる制動力配分の切り替わりBo→Aoにより、A側車輪3の制動力(0.79G)がB側車輪4の制動力(0.21G)よりも大きくなって大小関係が逆転することで、
走行方向前側のA側車輪3が制動時荷重移動により輪荷重を増大され、走行方向後側のB側車輪4が制動時荷重移動により輪荷重を低下されても、B側車輪4がA側車輪3より先にロックして挙動不安定になるのを回避することができる。
しかも、上記の制動力配分が理想特性Ao上のA1点における制動力配分であることから、輪荷重の増大により大きくなった前側車輪3が発生可能な制動力を最大限利用することができ、図7(a)に示すごとく、0.79G+0.21G=1.0Gもの大きな車両減速度αを得ることができる。
【0053】
なお上記の作用効果は、運転席方向の反転により走行方向前方をA側からB側へと切り替えた場合も、
A側車輪3およびB側車輪4間の制動力配分を、図6の理想特性Aoに対応する図8の制動力配分特性Ao上の制動力配分から、図6の理想特性Boに対応する図8の制動力配分特性Bo上の制動力配分へと切り替えることによって、同様に達成し得るのは言うまでもない。
【0054】
ところで、特許文献1に記載のように運転席の向きが不変の運転席方向固定車両にあっては、運転席が向いている側の車輪(B側車輪)4が常に前輪であることから、A側車輪3との間における摩擦制動による制動力配分が常に図8の制動力配分特性Bo上における制動力配分となるようブレーキ液圧を制御する。
従って、A側が走行方向前方となる車両後進中の制動時は、後進方向前側のA側車輪3が荷重移動により輪荷重を増大され、後進方向後側のB側車輪4が荷重移動により輪荷重を低下されるにもかかわらず、これに逆行するような制動力配分、つまりB側車輪4の制動力がA側車輪3の制動力よりも大きな制動力配分にすることとなり、
特性Boに沿った制動力配分制御を行わない場合よりも更に、B側車輪4の先ロック傾向(挙動不安定)を生ずるという問題が顕著になると共に、A側車輪3が発生可能な制動力を十分に使い切ることができず、期待通りの車両減速度を得られないという問題が顕著になる。
【0055】
そこで特許文献1に記載の前記した提案技術を応用し、A側が走行方向前方となる車両走行中の制動時に、走行方向前側車輪であるA側車輪3の荷重増加に応じたモータ回生制動力を当該車輪3に付加した場合の制動力配分を、上記した第1実施例との比較例として以下に説明する。
【0056】
図8の制動力配分特性Bo上におけるB1点(A側車輪3の制動力=0.1G、B側車輪4の制動力=0.18G)での摩擦制動時を考察する。
この摩擦制動に伴って生ずるA側車輪3の荷重増加に応じたモータ回生制動力をA側車輪3に付加することが特許文献1に記載の前記した提案技術の趣旨であるが、
通常4輪モータ駆動式電気自動車においては、A側またはB側のいずれかで発生可能な回生制動力は高く見積もっても0.4G程度が限度である。
【0057】
車両の挙動安定性を考慮して、A側車輪3およびB側車輪4間の制動力配分を理想制動力配分特性Ao上のもの、若しくはこれに近いものにしようとすると、最大回生制動力0.4Gでは、A側車輪3の制動力は図8に示すように0.1Gから、理想制動力配分特性Ao上のA2点における0.5G程度までしか増大させることができない。
【0058】
結果として図7(b)に示すように、A側車輪3による制動力は0.5Gとなり、B側車輪4による制動力は0.18Gとなり、この制動力配分が理想制動力配分特性Ao上のものであることから、B側車輪4の先ロック(挙動不安定)は防止し得るものの、
車両減速度αは、A側車輪3の制動力=0.5Gと、B側車輪4の制動力=0.18Gとの和値である0.68G程度しか得られない。
【0059】
しかし第1実施例によれば、図7(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合でも、逆に走行方向前方をA側からB側へと切り替えた場合でも、A側車輪3およびB側車輪4間の制動力配分を、走行方向前側車輪の制動力が走行方向後側車輪の制動力より大きくなるような制動力配分に切り替えるため、
走行方向前側車輪が制動時荷重移動により輪荷重を増大され、走行方向後側車輪が制動時荷重移動により輪荷重を低下されても、後側車輪が前側車輪より先にロックして挙動不安定になるのを回避することができると共に、
輪荷重の増大により大きくなった前側車輪で発生可能な制動力を最大限利用することができ、運転者が所望する通りの大きな車両減速度αを得ることができる。
【0060】
なお本実施例のように、各ブレーキ液圧制御ユニット43,44を、各摩擦制動ユニット29,31とともに、全てが同仕様のものとし、ブレーキ液圧系41a,41bも全てが同仕様のものとすることで、A側車輪3の液圧制動システムとB側車輪4の液圧制動システムとを同仕様に構成する場合、
制動力配分制御を切り替えるのみで、制動システムの構成を単純化しつつ、上記諸々の作用効果を達成することができる。
【0061】
また運転席方向可変車両を、運転席方向の切り替えによっても車両の走行方向前後における重量配分が変わらないような車両とし、これに対し本実施例の制動装置を適用するようにするのがよく、この場合、制御パラメータの設定なども単純化しつつ、上記諸々の作用効果を達成することができる。
【0062】
<第2実施例>
図9,10は、本発明の第2実施例になる制動装置を示し、図9は、図3に対応する制動システム図、図10は、図5に対応する制動力配分制御のプログラムを示すフローチャートである。
本実施例においても、運転席方向可変車両は図1,2につき前述したと同様なものとし、図9において、図1,2におけると同様な部品には同一符号を付して示した。
しかし車両の制動を常時、図9から明らかなように、マスターシリンダ41および制動ユニット29,31による摩擦制動と、車輪駆動モータ21,22による回生制動との協調制御により実行して、目標制動力配分と要求減速度とを達成するようになす。
【0063】
そのため、ブレーキ液圧系41a,41bから、図3におけるブレーキ液圧制御ユニット43,44を排除し、これにより常に、ブレーキ液圧系41a,41bへの同じマスターシリンダ液圧Pmがそのまま摩擦制動ユニット29,30へ供給されて、A側車輪3の摩擦制動力とB側車輪4の摩擦制動力とが常に同じになるようにする。
かかる摩擦制動によるA側車輪3およびB側車輪4間の制動力配分特性は図11にCで示すように、図6に同符号Cで示すと同様な50:50の制動力配分特性となる。
【0064】
本実施例においては、かかる制動力配分特性Cを呈する摩擦制動との協調制御により、車輪駆動モータ21,22による回生制動が目標制動力配分と要求減速度とを達成し得るようになすため、
コントローラ12が車輪駆動モータ21,22を電動機として作動させるよう車輪駆動モータ21,22に要求駆動力対応の駆動負荷を指令するほかに、車輪駆動モータ21,22を発電機として作動させるよう車輪駆動モータ21,22に回生制動力対応の発電負荷を指令するように構成する。
なお車輪駆動モータ21,22による回生制動制御は、液圧制御である摩擦制動力制御よりも高応答で、本実施例の制動装置は前記した第1実施例の制動装置よりも、制御応答性の点において優れる。
【0065】
かかる車輪駆動モータ21,22への発電負荷指令は、マスターシリンダ駆動用リニヤアクチュエータ42のストローク制御とともに、コントローラ12でこれらを実行するものとする。
そのためコントローラ12には、
ブレーキペダル32の踏み込み量Lb(車両の要求減速度)を検出するブレーキペダル踏み込みセンサ45からの信号と、
車輪駆動モータ21,22に内蔵されてその回転速度Vmを検出するモータ回転速度センサ(図示せず)からの信号とをそれぞれ入力する。
【0066】
コントローラ12は、これら入力情報および内部情報を基に、運転席方向制御および制動力配分制御を行うが、前者の運転席方向制御は図4につき前述したと同じであるため、ここではその説明を省略した。
【0067】
<制動力配分制御>
コントローラ12は、ブレーキペダル踏み込み量Lbに応じた量だけマスターシリンダ駆動用リニヤアクチュエータ42をストロークさせて、マスターシリンダ41から対応するマスターシリンダ液圧Pmを出力させることにより、各車輪3,4を図11の制動力配分特性Cとなるよう摩擦制動すると同時に、図10の制御プログラムを実行して制動力配分制御を遂行する。
【0068】
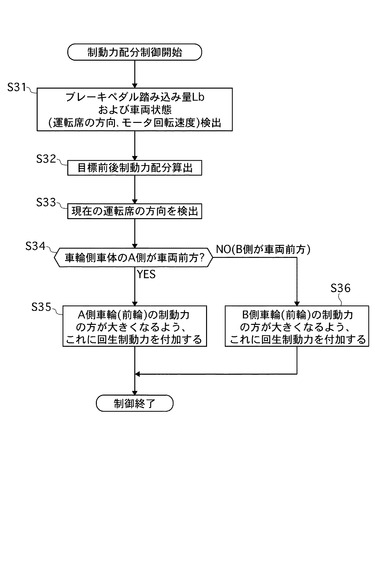
図10のステップS31においては、ブレーキペダル踏み込み量Lbおよび車両状態(図4により制御した運転席の向き、車輪駆動モータ21,22の回転速度Vm)を検出する。
次のステップS32においては、現在における運転席の向きに応じて図6にAoまたはBoで示す理想制動力配分特性に基づき目標とすべき前後制動力配分を算出する。
【0069】
ステップS32で、目標とすべき前後制動力配分を算出するに当たっては、
現在の運転席方向から走行方向一方側(A側)が前方である走行時か、走行方向他方側(B側)が前方である走行時かを判定し、
A側が前方である時は、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きい制動力配分を目標制動力配分とし、
B側が前方である時は、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きい制動力配分を目標制動力配分とする。
【0070】
ステップS33においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出する。
従ってステップS33は、本発明における運転席方向検知手段に相当する。
次のステップS34においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0071】
ステップS34で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS35において制動力配分を、ステップS32で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3に回生制動力を付加して(A側車輪3の車輪駆動モータ21に回生制動力相当の発電負荷を指令して)、当該A側車輪(前輪)3の制動力を前記した摩擦制動力と回生制動力との和値となす。
【0072】
なお、A側車輪(前輪)3に付加すべき目標回生制動力と、車輪駆動モータ21が発生可能な最大回生制動力とを比較し、前者の目標回生制動力が後者の発生可能最大回生制動力よりも大きい場合は、
A側車輪(前輪)3に付加する回生制動力を発生可能最大回生制動力とすべく、A側車輪3の車輪駆動モータ21に発生可能最大回生制動力相当の発電負荷を指令するものとする。
【0073】
ステップS34で車輪側車体1のA側が車両前方となる運転方向でない、つまり車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS36において制動力配分を、ステップS32で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4に回生制動力を付加して(B側車輪4の車輪駆動モータ22に回生制動力相当の発電負荷を指令して)、当該B側車輪(前輪)4の制動力を前記した摩擦制動力と回生制動力との和値となす。
【0074】
なお、B側車輪(前輪)4に付加すべき目標回生制動力と、車輪駆動モータ22が発生可能な最大回生制動力とを比較し、前者の目標回生制動力が後者の発生可能最大回生制動力よりも大きい場合は、
B側車輪(前輪)4に付加する回生制動力を発生可能最大回生制動力とすべく、B側車輪(前輪)4の車輪駆動モータ21に発生可能最大回生制動力相当の発電負荷を指令するものとする。
【0075】
従ってステップS34は、本発明における設定制動力配分切り替え手段に相当し、ステップS35およびステップS36は、本発明における制動手段に相当する。
【0076】
<第2実施例の作用効果>
上記のような第2実施例の制動力配分制御によれば、以下のような作用効果が奏し得られる。
つまり摩擦制動力制御(ブレーキ液圧制御)が不要で、モータ21,22への発電負荷制御(回生制動力制御)のみにより第1実施例と同様な作用効果が得られるため、システムの簡易化を図ることができると共に、発電負荷制御(回生制動力制御)が摩擦制動力制御(ブレーキ液圧制御)よりも高応答かつ高精度であるため制動力配分制御の応答性および制御精度を飛躍的に改善させることができる。
【0077】
また第2実施例の制動力配分制御によれば、図12(a),(b)に示すように走行方向前方を車輪側車体1のB側からA側へと切り替えて走行する場合につき、図11,12を用いて説明すると、以下のごとき定量的な作用効果を達成することができる。
【0078】
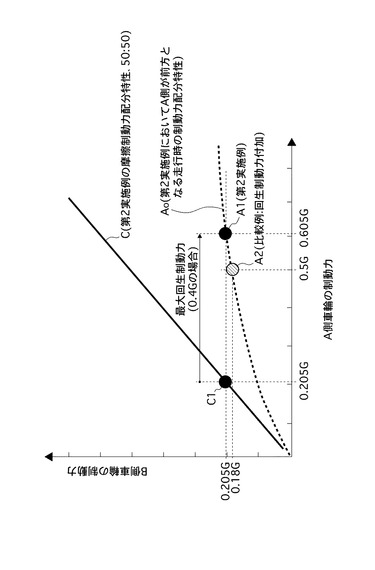
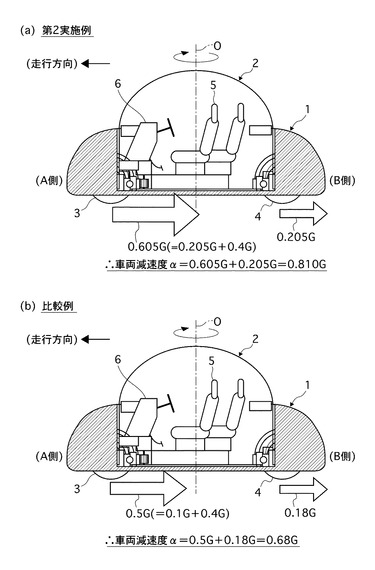
つまり、図12(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合、A側車輪3およびB側車輪4間の制動力配分は、図6の理想特性Boに対応する制動力配分特性(図11では省略した)上の制動力配分から、図6の理想特性Aoに対応する図11の制動力配分特性Ao上の制動力配分へと切り替わり、
摩擦制動力配分特性(50:50)C上における例えばC1点(A側車輪3の摩擦制動力=0.205G、B側車輪4の摩擦制動力=0.205G)での制動時であれば、C1点におけるA側車輪3の摩擦制動力(0.205G)に例えば最大回生制動力0.4Gを付加して(ステップS35)、図11の制動力配分特性Ao上のA1点における制動力配分となし、図12(a)に示すごとくA側車輪3では0.605Gの制動力が発生し、B側車輪4では0.205Gの制動力が発生するように切り替わる。
【0079】
かかる制動力配分のAoへの切り替わりにより、A側車輪3の制動力(0.605G)がB側車輪4の制動力(0.205G)よりも大きくなって大小関係が逆転することで、
走行方向前側のA側車輪3が制動時荷重移動により輪荷重を増大され、走行方向後側のB側車輪4が制動時荷重移動により輪荷重を低下されても、B側車輪4がA側車輪3より先にロックして挙動不安定になるのを回避することができる。
しかも、上記の制動力配分が理想特性Ao上のA1点における制動力配分であることから、輪荷重の増大により大きくなった前側車輪3が発生可能な制動力を最大限利用することができ、図12(a)に示すごとく、0.605G+0.205G=0.810Gのごとき大きな車両減速度αを得ることができる。
【0080】
なお上記の作用効果は、運転席方向の反転により走行方向前方をA側からB側へと切り替えた場合も、A側車輪3およびB側車輪4間の制動力配分を、図6の理想特性Aoに対応する図11の制動力配分特性Ao上における制動力配分から、図6の理想特性Boに対応する制動力配分特性(図8では省略した)上の制動力配分へと切り替えることにより、同様に達成し得るのは言うまでもない。
【0081】
ところで、特許文献1に記載の前記した提案技術を応用し、A側が走行方向前方となる車両走行中の制動時に、走行方向前側車輪であるA側車輪3の荷重増加に応じたモータ回生制動力を当該車輪3に付加した場合の制動力配分(これを、上記した第2実施例との比較例とする)は、図8につき前述した通り、図11の制動力配分特性Ao上におけるA2点(A側車輪3の摩擦制動力=0.5G、B側車輪4の摩擦制動力=0.18G)の制動力配分である。
【0082】
その結果として図12(b)に示すように、A側車輪3による制動力は0.5Gとなり、B側車輪4による制動力は0.18Gとなり、この制動力配分が理想制動力配分特性Ao上のものであることから、B側車輪4の先ロック(挙動不安定)は防止し得るものの、
車両減速度αは、A側車輪3の制動力=0.5Gと、B側車輪4の制動力=0.18Gとの和値である0.68G程度しか得られない。
【0083】
しかし第2実施例によれば、図12(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合でも、逆に走行方向前方をA側からB側へと切り替えた場合でも、A側車輪3およびB側車輪4間の制動力配分を、走行方向前側車輪の制動力が回生制動力の付加により走行方向後側車輪の制動力より大きくなるような制動力配分に切り替えるため、
走行方向前側車輪が制動時荷重移動により輪荷重を増大され、走行方向後側車輪が制動時荷重移動により輪荷重を低下されても、後側車輪が前側車輪より先にロックして挙動不安定になるのを回避することができると共に、
輪荷重の増大により大きくなった前側車輪で発生可能な制動力を、第1実施例ほどではないにしても、できるだけ利用して大きな車両減速度αを発生させることができる。
【0084】
なお第2実施例であっても、車両重心が低く(前記した車両重心高hが小さく)、前記したホイールベースLが長い運転席方向可変車両に適用する場合、前記(1),(2)式から明らかなように車両減速度αを、第1実施例と同程度の大きさにすることができるのは言うまでもない。
【0085】
<第3実施例>
図13は、本発明の第3実施例になる制動装置の制動力配分制御プログラムを示し、図5,10に対応するフローチャートである。
本実施例において、運転席方向可変車両は図1,2につき前述したと同様なものとし、車両の制動システムは図9につき前述したと同様なもの、つまりマスターシリンダ41および制動ユニット29,31による摩擦制動と、車輪駆動モータ21,22による回生制動との協調制御により目標制動力配分と要求減速度とを達成するものとする。
【0086】
なお、本実施例において図9のコントローラ12は、運転席方向制御および制動力配分制御を行うが、前者の運転席方向制御は図4につき前述したと同じであるため、ここではその説明を省略し、
ここでは、図9のコントローラ12が図13の制御プログラムに沿って実行する制動力配分制御のみにつき、図14,15を参照しつつ以下に説明する。
【0087】
<制動力配分制御>
図9のコントローラ12は、ブレーキペダル踏み込み量Lbに応じた量だけマスターシリンダ駆動用リニヤアクチュエータ42をストロークさせて、マスターシリンダ41から対応するマスターシリンダ液圧Pmを出力させることにより、各車輪3,4を図15の制動力配分特性Cとなるよう摩擦制動すると同時に、図13の制御プログラムを実行して制動力配分制御を遂行する。
【0088】
図13のステップS41においては、ブレーキペダル踏み込み量Lbおよび車両状態(図4により制御した運転席の向き、車輪駆動モータ21,22の回転速度Vm)を検出する。
次のステップS42においては、現在における運転席の向きに応じて図6にAoまたはBoで示す理想制動力配分特性に基づき目標とすべき前後制動力配分を算出する。
【0089】
ステップS42で、目標とすべき前後制動力配分を算出するに当たっては、
現在の運転席方向から走行方向一方側(A側)が前方である走行時か、走行方向他方側(B側)が前方である走行時かを判定し、
A側が前方である時は、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きい制動力配分を目標制動力配分とし、
B側が前方である時は、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きい制動力配分を目標制動力配分とする。
【0090】
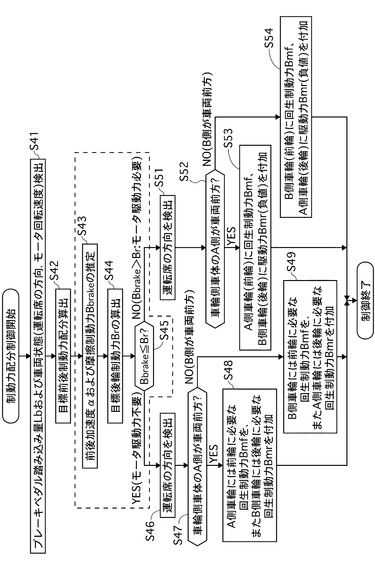
ステップS43においては、ブレーキペダル踏み込み量Lbおよび車輪駆動モータ21,22の回転速度Vmから車両の要求減速度αを推定すると共に、この要求減速度αを用いて以下のごとくに摩擦制動力Bbrakeを求めて推定する。
この摩擦制動力Bbrakeを求めるに当たっては、先ず上記の要求減速度αを前記(1)式に代入することにより、この要求減速度αを実現するための、図6の理想制動力配分特性Ao(Bo)上における走行方向前側車輪の目標前輪制動力Bfを求め、この目標前輪制動力Bfから、走行方向前側車輪の車輪駆動モータ21または22が発生可能な最大回生制動力Bmfmaxを差し引くことにより走行方向前側の摩擦制動力Bbrakeを求める。
【0091】
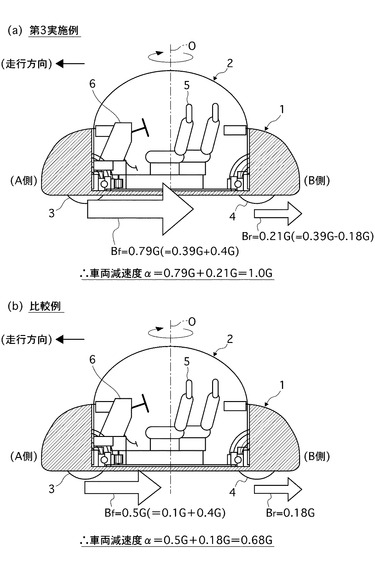
図15(a),(b) に示すごとく車輪側車体1のA側が走行方向前方である場合につき、上記摩擦制動力Bbrakeの求め方を説明するに、
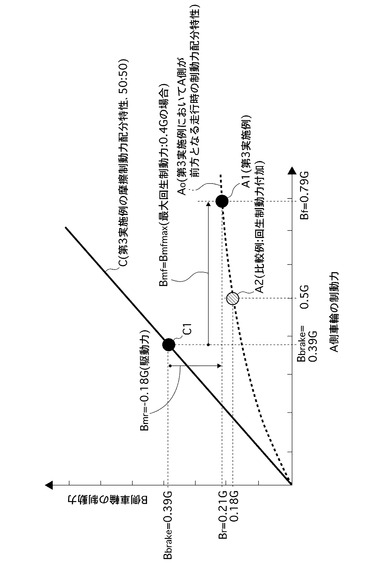
先ず要求減速度αを前記(1)式に代入して、この要求減速度αを実現するための、図14の理想制動力配分特性Ao(図6の理想制動力配分特性Aoに同じ)上における走行方向前側車輪(A側車輪3)の目標前輪制動力Bf(例えば図14のA1点での0.79G)を求め、この目標前輪制動力Bfから、A側車輪3の車輪駆動モータ21が発生可能な最大回生制動力Bmfmax(図14では0.4G)を差し引くことによりA側車輪の摩擦制動力Bbrake(図14では0.39G)を求める。
なお図14にも示すが、走行方向後側におけるB側車輪の摩擦制動力も、Bbrake=0.39Gに対応した、摩擦制動力配分特性C上の点C1における値であることから、A側車輪の摩擦制動力Bbrake(0.39G)と同じである。
【0092】
上記のように摩擦制動力Bbrakeを求めるのは、図14の場合のように目標前輪制動力Bfが最大回生制動力Bmfmaxよりも大きい(Bf>Bmfmaxである)ときであって、この場合(Bf>Bmfmaxの場合)は、上記のように
摩擦制動力Bbrakeを、Bbrake=Bf−Bmfmaxと見なすと同時に、
前側車輪駆動モータ21または22で発生させる回生制動力Bmfを、Bmf=Bmfmaxと見なす。
【0093】
しかし、逆に最大回生制動力Bmfmaxが目標前輪制動力Bf以上である場合(Bf≦Bmfmaxの場合)は、目標前輪制動力Bfの全てを回生制動のみで賄い得ることから、
摩擦制動力Bbrakeを、Bbrake=0と見なすと同時に、
前側車輪駆動モータ21または22で発生させる回生制動力Bmfを、Bmf=Bfと見なす。
【0094】
次のステップS44においては、ステップS43で推定した車両の要求減速度αを前記(2)式に代入することにより、この要求減速度αを実現するための、図6の理想制動力配分特性Ao(Bo)上における走行方向後側車輪の目標後輪制動力Brを算出する。
従ってステップS44は、本発明における目標後輪制動力演算手段に相当する。
【0095】
ステップS45においては、ステップS43で求めた摩擦制動力Bbrakeと、ステップS44で算出した目標後輪制動力Brとを対比し、前者の摩擦制動力Bbrakeが後者の目標後輪制動力Br以下(Bbrake≦Br)か、それとも前者の摩擦制動力Bbrakeが後者の目標後輪制動力Brを越えている(Bbrake> Br)かをチェックする。
かかる摩擦制動力Bbrakeおよび目標後輪制動力Brの対比は、図15(a),(b) のように車輪側車体1のA側が走行方向前方であって、第3実施例の制動装置が図14の理想制動力配分特性Ao上におけるA1点での制動力配分制御を行う場合につき説明すると、
図14の縦軸(B側車輪4の制動力)上における摩擦制動力Bbrakeと目標後輪制動力Brとを比較することである。
【0096】
Bbrake> Brであるということは、図14に示すように摩擦制動力Bbrakeが理想制動力配分特性Ao上の点A1における目標後輪制動力Brよりも大きくて、走行方向後側(図14の場合、B側車輪4)の制動力が理想制動力配分実現値よりも大きく、車両の挙動を不安定にすることを意味する。
逆にBbrake≦Brであるということは、摩擦制動力Bbrakeが目標後輪制動力Br以下であって、走行方向後側車輪の制動力が理想制動力配分実現値以下であるため、車両の挙動を不安定にすることはないが、摩擦制動力Bbrakeおよび目標後輪制動力Br間の差分だけ当該車輪の制動力が目標値に対して不足することを意味する。
【0097】
そこで、ステップS45においてBbrake≦Brと判定するときは、走行方向後側車輪の上記制動力不足を補うため、制御をステップS46〜ステップS49に進める。
ステップS46においては、図4により制御した運転席5の向きを検出する。
従ってステップS46は、本発明における運転席方向検知手段に相当する。
次のステップS47においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0098】
ステップS47で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS48において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6,14にAoで示す理想制動力配分特性に一致もしくは近づくよう、
A側車輪3に対し前輪に必要な回生制動力Bmf(図14では最大回生制動力Bmfmax)を付加して(A側車輪3の車輪駆動モータ21に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該A側車輪(前輪)3の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
B側車輪4に対し後輪に必要な回生制動力Bmr=(Br−Bbrake)≧0を付加して(B側車輪4の車輪駆動モータ22に後輪用の回生制動力Bmr相当の発電負荷を指令して)、当該B側車輪(後輪)4の制動力Brを前記した摩擦制動力Bbrakeと上記回生制動力Bmrとの和値となす。
【0099】
ステップS47で車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS49において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、
B側車輪4に対し前輪に必要な回生制動力Bmfを付加して(B側車輪4の車輪駆動モータ22に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該B側車輪(前輪)4の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
A側車輪3に対し後輪に必要な回生制動力Bmr=(Br−Bbrake)≧0を付加して(A側車輪3の車輪駆動モータ21に後輪用の回生制動力Bmr相当の発電負荷を指令して)、当該A側車輪(後輪)3の制動力Brを前記した摩擦制動力Bbrakeと上記回生制動力Bmrとの和値となす。
【0100】
ステップS45で、図14に例示したごとくにBbrake>Brであると判定するときは、走行方向後側車輪の前記制動力過大(これによる車両挙動の不安定)を解消するため、制御をステップS51〜ステップS54に進める。
ステップS51においては、図4により制御した運転席5の向きを検出する。
従ってステップS51は、本発明における運転席方向検知手段に相当する。
次のステップS52においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0101】
ステップS52で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS53において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6,14にAoで示す理想制動力配分特性に一致もしくは近づくよう、
A側車輪3に対し前輪に必要な回生制動力Bmf(図14では、最大回生制動力Bmfmax)を付加して(A側車輪3の車輪駆動モータ21に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該A側車輪(前輪)3の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
B側車輪4に対し、前記した後輪の制動力過大(これによる車両挙動の不安定)を解消するために必要なモータ駆動力Bmr=Br−Bbrake(Bmrは、図14に例示するような負値)を付加して(B側車輪4の車輪駆動モータ22に後輪制動力過大解消用のモータ駆動力Bmr相当の駆動負荷を指令して)、当該B側車輪(後輪)4の制動力Brを図14に例示するように、前記した摩擦制動力Bbrakeよりも上記モータ駆動力分Bmrだけ小さな値となす。
【0102】
ステップS52で車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS54において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、
B側車輪4に対し前輪に必要な回生制動力Bmfを付加して(B側車輪4の車輪駆動モータ22に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該B側車輪(前輪)4の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
A側車輪3に対し、前記した後輪の制動力過大(これによる車両挙動の不安定)を解消するために必要なモータ駆動力Bmr=Br−Bbrake(Bmr<0)を付加して(A側車輪3の車輪駆動モータ21に後輪制動力過大解消用のモータ駆動力Bmr相当の駆動負荷を指令して)、当該A側車輪(後輪)3の制動力Brを、前記した摩擦制動力Bbrakeよりも上記モータ駆動力分Bmrだけ小さな値となす。
【0103】
従ってステップS47およびステップS52は、本発明における設定制動力配分切り替え手段に相当し、ステップS48およびステップS49と、ステップS53およびステップS54とはそれぞれ、本発明における制動手段に相当する。
【0104】
<第3実施例の作用効果>
上記のような第3実施例の制動力配分制御によれば、以下のような作用効果が奏し得られる。
つまり、図15(a),(b)に示すように走行方向前方を車輪側車体1のB側からA側へと切り替えて走行する場合につき、図14,15を用いて説明すると、以下のごとき定量的な作用効果を達成することができる。
【0105】
つまり、図15(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合、A側車輪3およびB側車輪4間の制動力配分は、図6の理想特性Boに対応する制動力配分特性(図14では省略した)上の制動力配分から、図6の理想特性Aoに対応する図14の制動力配分特性Ao上の制動力配分へと切り替わり、
摩擦制動力配分特性(50:50)C上における例えばC1点(A側車輪3の摩擦制動力Bbrake=0.39G、B側車輪4の摩擦制動力Bbrake=0.39G)での制動時であれば、C1点におけるA側車輪3の摩擦制動力(0.39G)に回生制動力Bmf(図14では最大回生制動力Bmfmax=0.4G)を付加すると共に、C1点におけるB側車輪4の摩擦制動力(0.39G)にモータ駆動力Bmr(=Br−Bbrake、図14ではBmr=−0.18G)を付加して(ステップS53)、図14の制動力配分特性Ao上のA1点における制動力配分となし、図15(a)に示すごとくA側車輪3ではBf=0.79G(摩擦制動力Bbrake=0.39Gと、回生制動力Bmf=0.4Gとの和値)の制動力が発生し、B側車輪4ではBr=0.21G(摩擦制動力Bbrake=0.39Gと、モータ駆動力Bmr=−0.18Gとの和値)の制動力が発生するように切り替わる。
【0106】
かかる制動力配分のAoへの切り替わりにより、A側車輪3の制動力Bf(0.79G)がB側車輪4の制動力(0.21G)よりも大きくなって大小関係が逆転することで、
走行方向前側のA側車輪3が制動時荷重移動により輪荷重を増大され、走行方向後側のB側車輪4が制動時荷重移動により輪荷重を低下されても、B側車輪4がA側車輪3より先にロックして挙動不安定になるのを回避することができる。
しかも、上記の制動力配分が理想特性Ao上のA1点における制動力配分であることから、輪荷重の増大により大きくなった前側車輪3が発生可能な制動力を最大限利用することができ、図15(a)に示すごとく、0.79G+0.21G=1.0Gのごとき大きな車両減速度αを得ることができる。
【0107】
なお上記の作用効果は、運転席方向の反転により走行方向前方をA側からB側へと切り替えた場合も、A側車輪3およびB側車輪4間の制動力配分をステップS54の実行により、図6の理想特性Aoに対応する図14の制動力配分特性Ao上における制動力配分から、図6の理想特性Boに対応する制動力配分特性(図14では省略した)上の制動力配分へと切り替えることにより、同様に達成し得るのは言うまでもない。
【0108】
ところで、特許文献1に記載の前記した提案技術を応用し、A側が走行方向前方となる車両走行中の制動時に、走行方向前側車輪であるA側車輪3の荷重増加に応じたモータ回生制動力を当該車輪3に付加した場合の制動力配分(これを、上記した第3実施例との比較例とする)は、図8につき前述した通り、図14の制動力配分特性Ao上におけるA2点(A側車輪3の摩擦制動力=0.5G、B側車輪4の摩擦制動力=0.18G)の制動力配分である。
【0109】
その結果として図15(b)に示すように、A側車輪3による制動力は0.5Gとなり、B側車輪4による制動力は0.18Gとなり、この制動力配分が理想制動力配分特性Ao上のものであることから、B側車輪4の先ロック(挙動不安定)は防止し得るものの、
車両減速度αは、A側車輪3の制動力=0.5Gと、B側車輪4の制動力=0.18Gとの和値である0.68G程度しか得られない。
【0110】
しかし第3実施例によれば、図15(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合でも、逆に走行方向前方をA側からB側へと切り替えた場合でも、A側車輪3およびB側車輪4間の制動力配分を、ステップS48またはステップS49およびステップS53またはステップS54での回生制動力の付加やモータ駆動力の付加により走行方向前側車輪の制動力が走行方向後側車輪の制動力より大きくなるような制動力配分に切り替えるため、
走行方向前側車輪が制動時荷重移動により輪荷重を増大され、走行方向後側車輪が制動時荷重移動により輪荷重を低下されても、後側車輪が前側車輪より先にロックして挙動不安定になるのを回避することができると共に、
輪荷重の増大により大きくなった前側車輪で発生可能な制動力を可能な限り利用して、大きな車両減速度αを発生させることができる。
【0111】
しかも第3実施例によれば、摩擦制動力Bbrakeがそれ単独で走行方向後側車輪を走行方向前側車輪よりも先にロックさせる過大なものである場合(ステップS45)、走行方向後側車輪へ回生動力に代えて、制動力過大分に相当するモータ駆動力を付加するようにしたため(ステップS53およびステップS54)、
このように摩擦制動力Bbrakeが過大になる制動時も、走行方向後側車輪の制動力を、当該後輪が走行方向前側車輪よりも先にロックすることのない大きさに抑制することができ、後輪先ロックによる挙動不安定を回避することができる。
【0112】
また走行方向前側車輪の制動力を、理想制動力配分特性上の目標前輪制動力となるよう制御するため、
制動時荷重移動により輪荷重が増大して発生可能な制動力が大きくなる前側車輪の制動力を最大限利用して、十分な車両減速度を確保することができる。
よって、かかる十分な車両減速度の確保と、上記した後輪先ロックの回避(車両の挙動不安定の回避)とを高度に両立させることができる。
【0113】
<その他の実施例>
なお上記した第1実施例〜第3実施例ではいずれも、図1,2に示すように、軸受9を介しキャビン側車体2をその中心鉛直線Oの周りに回転可能にして車輪側車体1上に載置し、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してキャビン側車体2の転向を行うこととしたが、
キャビン側車体2の転向機構は、これに限られるものでなく任意の構造のものにし得るし、またキャビン側車体2の転向も、キャビン側車体2が両方向へ正逆回転することで当該転向を行うものに限らず、一方向へのみ回転することで当該転向を行うものであってもよい。
【0114】
また車輪3,4の駆動方式についても、図1,2に示すように各車輪3,4ごとに車輪駆動モータ21,22を設け、各車輪3,4を個々の車輪駆動モータ21,22で駆動するようにした所謂インホイールモータ式のものに限られず、
車輪側車体1の走行方向一方側および他方側にそれぞれ1つずつ車輪駆動モータを設けて、対応する側における左右一対の車輪3,4を共通なモータで駆動するようにした車輪駆動方式でもよいし、
全輪3,4に共通な1個のモータを設けて、これによりディファレンシャルギヤ装置およびドライブシャフトを介し全輪3,4を駆動するようにした車輪駆動方式でもよい。
【0115】
更に、第1実施例では液圧ブレーキシステムを図3に示すように、4センサ・4チャンネルのX配管式液圧ブレーキシステムとし、ブレーキペダル踏み込み量Lbに応じたマスターシリンダ圧Pmを基に各車輪3,4へのブレーキ液圧をユニット43,44で電子制御することとしたが、車輪側車体1の走行方向一方側および他方側における車輪3,4の制動力配分を制御可能なシステムであれば、いかなる構成のブレーキシステムであってもよく、例えば前後スプリット式液圧ブレーキシステムでもよい。
【0116】
また第1実施例における図3に示した車輪速センサ46,47は、車輪3,4の駆動方式が図1〜3に示すようにインホイールモータ式のものである場合、車輪駆動モータ21,22の回転速度を検出するモータ回転センサに置換してもよく、この場合モータ回転センサは対応する個々の車輪3,4に内蔵させるのが有利である。
【符号の説明】
【0117】
1 車輪側車体
2 キャビン側車体
3 走行方向一方側の左右輪
4 走行方向他方側の左右輪
5 運転席
6 コクピットモジュール
7 乗員席
8 キャビン
9 キャビン側車体支承軸受
11 転向アクチュエータ
12 コントローラ
21,22 車輪駆動モータ
23 バッテリ
24,25 車輪駆動制御ユニット
26 ステアリングホイール
27,28 操舵アクチュエータ
29,31 摩擦制動ユニット
32 ブレーキペダル
41 マスターシリンダ
42 マスターシリンダ駆動用リニヤアクチュエータ
43,44 ブレーキ液圧制御ユニット
45 ブレーキペダル踏み込みセンサ
46,47 車輪速センサ
【技術分野】
【0001】
本発明は、車輪を懸架されて当該車輪の駆動および制動により走行および停止が可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両の制動装置に関するもので、特に当該制動装置の制動力配分制御技術に係わる。
【背景技術】
【0002】
車両の制動時は、車両前後方向への荷重移動により、進行方向前側車輪(前輪)の荷重が増加し、進行方向後側車輪(後輪)の荷重が減少する。
そのため、前後輪に同じ制動力を作用させると、輪荷重の小さな後輪が、輪荷重の大きな前輪よりも先にロックする傾向となる。
【0003】
前輪が先にロックした場合は、慣性方向後側の後輪が路面をグリップしているため、問題となるような車両の挙動不安定を生ずることはないが、
上記のように後輪が先に制動ロックして横力を十分に発生し得なくなると、慣性方向前側の前輪が路面をグリップしていることから、車両が前輪を中心とした旋回挙動を起こして挙動不安定になるという問題を生ずる。
【0004】
更に、前輪は輪荷重が大きいことから、更に大きな制動力をかけても未だロックすることがないのに、上記後輪先ロックの故に、未だ余裕のある前輪制動力を十分に使い切ることができず、車両全体としての制動力不足を生じ、運転者がブレーキ操作で期待した通りの車両減速度が得られないという問題も生ずる。
【0005】
上記の問題に鑑み通常は、先ロック傾向の後輪の制動力を前輪のそれよりも小さくする前後輪制動力配分制御を行い、これにより後輪の先ロック傾向を緩和して、後輪の先ロックによる挙動不安定を解消すると共に、かかる後輪先ロック傾向の緩和によって、輪荷重が大きくなる前輪の制動力を十分に使い切るようになすことで、運転者がブレーキ操作で期待した通りの車両減速度が得られるようにするのが普通である。
【0006】
しかし、上記のような前後輪制動力配分制御を行う場合、車両が後進するときに以下のような問題を生ずる。
つまり後進中の制動時は上記と逆に、後進方向前側の車輪(上記の後輪)が荷重移動により輪荷重を増大され、後進方向後側の車輪(上記の前輪)が荷重移動により輪荷重を低下されることから、後進方向前側車輪(後輪)に制動力の余裕が発生し、後進方向後側車輪(前輪)が先ロック傾向となる。
【0007】
それにもかかわらず前記の前後輪制動力配分制御により後進方向前側車輪(後輪)の制動力を後進方向後側車輪(前輪)の制動力よりも小さくするのでは、荷重移動に逆行するような前後輪制動力配分となって、
当該前後輪制動力配分制御を行わない場合よりも更に、後進方向後側車輪(前輪)の制動力過大による先ロック傾向(挙動不安定)の問題が顕著になると共に、後進方向前側車輪(後輪)の制動力を十分に使い切ることができないことで期待通りの車両減速度を得られないという問題が顕著になる。
【0008】
このような後進制動時の問題に鑑み従来、例えば特許文献1に記載のような技術が提案されている。
この提案技術は、車両の後進中に制動が行われた場合、後進方向前側車輪(後輪)の荷重増加に応じたモータ回生制動力を当該車輪に付加するようになし、これにより上記の問題を軽減しようとするものである。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−312943号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし上記した従来技術は、本発明が要旨構成の前提とするような運転席方向可変車両の制動装置に係わるものに非ず、運転席の向きが固定された車両の制動装置に係わるものであるし、
しかも上記した従来技術では、要求減速度が小さな制動時であって、大きなモータ回生制動力が得られる場合しか、しかも車両重心高とホイールベースとの比が小さくて制動時の荷重移動が少ない車両においてしか、上記の問題軽減を期待することができない。
【0011】
本発明が要旨構成の前提とする前記した型式の運転席方向可変車両は、車輪側車体から見たとき一方向走行と他方向走行とをほぼ同頻度で使用することを趣旨として運転席の向きを変え得るようにしたものであり、いずれ方向への走行時も大きな減速度が要求される制動を行うことがある。
【0012】
そのため、本発明が要旨構成の前提とする運転席方向可変車両に上記の従来技術を適用すると、前記の問題軽減を実現することができない。
以下にその理由を詳述する。
ブレーキ操作による要求減速度が大きくなると、進行方向前側の車輪では、荷重移動で増加した輪荷重を使い切る分だけの大きな制動力が必要なため、最大限のモータ回生制動力と、最大限の摩擦制動力が要求される。
【0013】
しかし、進行方向前側の車輪で最大限の摩擦制動力を出すようにした場合、逆方向への後進時は進行方向後側の車輪が制動力最大となって制動力配分が進行方向後寄りになることから、進行方向後側では進行方向前側以上の摩擦制動力を出すことになり、そのため進行方向後側の車輪がロックし易くなり、車両の挙動安定性を損なう虞がある。
【0014】
かといって、進行方向後側の車輪をロックさせずに車両の挙動安定性を確保しようとすると、後側の摩擦制動力の減少に伴って、前側の摩擦制動力もさらに減少するため、この減少分を補い得るほどに大きな回生制動力を発生可能な大型モータを搭載している場合以外は、十分な車両減速度を得られない虞がある。
【0015】
本発明は、上記の問題に鑑み、前記した型式の運転席方向可変車両において、運転席を走行方向一方側および走行方向他方側の何れ側に向けて走行する場合でも、確実に車両の挙動安定性と要求減速度の実現とを両立させ得るようにした運転席方向可変車両の制動装置を提案することを目的とする。
【課題を解決するための手段】
【0016】
この目的のため、本発明による運転席方向可変車両の制動装置は、以下のごとくにこれを構成する。
先ず、本発明の要旨構成の基礎前提となる運転席方向可変車両を説明するに、これは、
車輪を懸架されて該車輪の駆動および制動により走行および停止が可能な車輪側車体と、
運転席収容キャビンを有して運転席が少なくとも上記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう上記車輪側車体上に載置したキャビン側車体とより成るものである。
【0017】
本発明は、かかる運転席方向可変車両に対し、
上記運転席が上記車輪側車体の走行方向一方側および走行方向他方側のいずれ側に向いているのかを検出する運転席方向検知手段と、
上記車輪側車体の走行方向一方側に近い走行方向一方側車輪の制動力および上記車輪側車体の走行方向他方側に近い走行方向他方側車輪の制動力間における制動力配分を設定制動力配分となるよう制御しつつ上記車輪の制動を司る制動手段と、
上記運転席方向検知手段で検出した運転席の向きに応じて上記設定制動力配分を異ならせる設定制動力配分切り替え手段とを設けた構成に特徴づけられる。
【発明の効果】
【0018】
上記した本発明による運転席方向可変車両の制動装置にあっては、
制動手段が走行方向一方側車輪および走行方向他方側車輪間の制動力配分を制御するに際して目標とする設定制動力配分を、運転席の向きに応じて、つまり車両の走行方向に応じて異ならせるため、
運転席を走行方向一方側および走行方向他方側の何れ側に向けて走行する場合も、上記の制動力配分を、車両の挙動安定性と要求減速度の実現とが両立されるようなものとすることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の制動装置を適用可能な運転席方向可変車両の一例を示す概略平面図である。
【図2】図1における運転席方向可変車両の概略側面図である。
【図3】本発明の第1実施例になる制動装置を示す、ブレーキ液圧制御システム図である。
【図4】図1,2における運転席方向可変車両の運転席方向を制御するプログラムを示すフローチャートである。
【図5】図3におけるコントローラが実行する制動力配分制御のプログラムを示すフローチャートである。
【図6】運転席方向可変車両の走行方向に応じた理想制動力配分特性を、参考のため併記した50:50の制動力配分特性と共に示す特性線図である。
【図7】第1実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果とを、運転席方向可変車両が一方の方向へ走行する場合につき比較して示すもので、 (a)は、第1実施例の制動装置による制動力配分制御の制御結果を示す説明図、 (b)は、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果を示す比較例の説明図である。
【図8】図7(a)に示した第1実施例の制動装置による制動力配分制御の制御結果と、図7(b)に示した比較例による制動力配分制御の制御結果とを、同じ制動力配分特性線図上に併記して示す比較用特性線図である。
【図9】本発明の第2実施例になる制動装置の制動システムを示す、図3に対応する制動システム図である。
【図10】図9におけるコントローラが実行する制動力配分制御のプログラムを示す、図5に対応するフローチャートである。
【図11】第2実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における比較例の制動力配分制御結果とを、同じ制動力配分特性線図上に併記して示す比較用特性線図である。
【図12】第2実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果とを、運転席方向可変車両が一方の方向へ走行する場合につき比較して示すもので、 (a)は、第2実施例の制動装置による制動力配分制御の制御結果を示す説明図、 (b)は、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果を示す比較例の説明図である。
【図13】本発明の第3実施例になる制動装置が実行する制動力配分制御のプログラムを示す、図5,10に対応するフローチャートである。
【図14】第3実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における比較例の制動力配分制御結果とを、同じ制動力配分特性線図上に併記して示す比較用特性線図である。
【図15】第3実施例の制動装置による制動力配分制御の制御結果と、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果とを、運転席方向可変車両が一方の方向へ走行する場合につき比較して示すもので、 (a)は、第3実施例の制動装置による制動力配分制御の制御結果を示す説明図、 (b)は、運転席方向可変車両に従来の考え方を適用した場合における制動力配分制御の制御結果を示す比較例の説明図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
<第1実施例>
図1,2はそれぞれ、本発明の制動装置を適用可能な運転席方向可変車両を例示し、図1は、その概略平面図、図2は、その概略側面図である。
【0021】
図1,2に示す運転席方向可変車両は、車輪側車体1およびキャビン側車体2により概ね構成する。
車輪側車体1は、該車輪側車体1の走行方向一方側に左右輪3をサスペンション装置3aにより懸架して具えると共に、該車輪側車体1の走行方向他方側に左右輪4をサスペンション装置4aにより懸架して具え、これら車輪3,4の駆動および制動により車輪側車体1は走行および停止が可能なものとする。
【0022】
キャビン側車体2は、運転席5、運転席前方のコクピットモジュール6、および運転席斜め後方における2個の乗員席7を収容したキャビン8を有するドーム形状とし、キャビン側車体2の中心鉛直線Oの周りに回転して転向し得るよう車輪側車体1上に載置する。
この載置に当たっては、車体1側に固設したアウターレース9oおよび車体2側に固設したインナーレース9i間にボール9bを介在させてなるボールベアリング型式の軸受9を用いる。
【0023】
キャビン側車体2の中心鉛直線Oの周りにおける回転は、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してこれを行うこととする。
【0024】
転向アクチュエータ11は、キャビン側車体2の回転位置を検出するキャビン側車体回転位置センサ(図示せず)を内蔵し、これからの信号および運転席方向指令スイッチ(図示せず)からの信号を基に、コクピットモジュール6に設けたコントローラ12が転向アクチュエータ11を駆動制御して、
キャビン側車体2の回転位置を、運転席が運転席方向指令スイッチからの指令通り車輪側車体1の走行方向一方側(図示のごとく車輪3の側)または走行方向他方側(図示とは反対における車輪4の側)に向く回転位置となし得るようにする。
【0025】
なおキャビン側車体2の回転量は、上記のように運転席の向きを相互反転できる量であれば任意であり、キャビン側車体2が180度だけ往復回転するものであっても、キャビン側車体2が360度に亘って回転するものであってもよい。
【0026】
車輪側車体1の走行および停止を司る車輪3,4の車輪駆動部および車輪制動部を以下に説明する。
【0027】
先ず車輪駆動部を説明するに、各車輪3,4に駆動結合して車輪駆動モータ21,22を設け、これらモータ21,22を車輪側車体1上に搭載する。
車輪駆動モータ21,22はそれぞれ、キャビン側車体2の床下に収納したバッテリ23からの電力をインバータおよびコントローラよりなる駆動制御ユニット24,25による制御下で供給されることにより駆動制御され、かかる車輪駆動モータ21,22の駆動制御により車輪側車体1およびキャビン側車体2(運転席方向可変車両)を走行可能にする。
なおバッテリ23からの電力は、キャビン側車体2の回転(転向)を司る転向アクチュエータ11の駆動にも供される。
【0028】
上記した運転席方向可変車両(車輪側車体1およびキャビン側車体2)の走行中における操舵は、
コクピットモジュール6に設けたステアリングホイール26からの操舵指令に応動して、同じくコクピットモジュール6に設けた前記コントローラ12がステアバイワイヤ式の操舵アクチュエータ27,28を介し、対応する車輪3,4を転舵することにより当該操舵を行うものとする。
【0029】
次に車輪制動部を説明するに、各車輪3,4に関連して車輪側車体1にドラムブレーキやディスクブレーキ等の摩擦制動ユニット29,31を設ける。
これら摩擦制動ユニット29,31による車輪3,4の摩擦制動は、コクピットモジュール6に設けたブレーキペダル32からの制動指令に応動して、同じくコクピットモジュール6に設けたコントローラ12が、ブレーキバイワイヤ式に摩擦制動ユニット29,31を液圧作動させることにより、対応する車輪3,4の当該摩擦制動を行うものとする。
【0030】
車輪3,4の摩擦制動システムは図3に示すごときもので、41はマスターシリンダを示す。
マスターシリンダ41は2系統液圧マスターシリンダとし、内蔵ピストンをマスターシリンダ駆動用リニヤアクチュエータ42により押し込まれるとき、一方のブレーキ液圧系41aおよび他方のブレーキ液圧系41bにそれぞれ、ピストン押し込み量に応じた同じマスターシリンダ液圧Pmを出力するものとする。
【0031】
一方のブレーキ液圧系41aは二分岐させて、左右輪3のうちの左車輪に係わる摩擦制動ユニット29および左右輪4のうちの右車輪に係わる摩擦制動ユニット31にそれぞれ接続し、
他方のブレーキ液圧系41bは二分岐させて、左右輪3のうちの右車輪に係わる摩擦制動ユニット29および左右輪4のうちの左車輪に係わる摩擦制動ユニット31にそれぞれ接続することにより、X配管式2系統液圧ブレーキシステムとなす。
【0032】
かかるX配管式2系統液圧ブレーキシステムに対し、左右輪3を個別に、また左右輪4を個別にブレーキ液圧制御するためのブレーキ液圧制御ユニット43,44を挿置し、
これら各ブレーキ液圧制御ユニット43,44は、各摩擦制動ユニット29,31とともに、全てを同仕様のものとし、ブレーキ液圧系41a,41bも全て同仕様のものとする。
各ブレーキ液圧制御ユニット43,44の作動制御、およびマスターシリンダ駆動用リニヤアクチュエータ42のストローク制御は、前記したコントローラ12によりこれらを実行するものとする。
【0033】
そのためコントローラ12には、
ブレーキペダル32の踏み込み量Lb(車両の要求減速度)を検出するブレーキペダル踏み込みセンサ45からの信号と、
左右輪3の回転速度Vw1,Vw2を個別に検出する車輪速センサ46からの信号と、
左右輪4の回転速度Vw3,Vw4を個別に検出する車輪速センサ47からの信号とをそれぞれ入力する。
【0034】
コントローラ12は、これら入力情報および内部情報を基に、以下のごとくに運転席方向制御および制動力配分制御を行う。
【0035】
<運転席方向制御>
コントローラ12は、図4の制御プログラムを実行して運転席方向制御を遂行する。
ステップS11においては、前記した運転席方向指令スイッチからの信号を基に、運転者が運転席5の方向転換(走行方向転換)を指令したのを検出する。
運転席5の方向転換が指令されるまでは、ステップS11が実行されないから、ここで待機する。
【0036】
運転席5の方向転換が指令され、ステップS11が実行されたら、ステップS12において、車輪3,4の回転速度Vw1,Vw2,Vw3,Vw4を基に車体速度Vを推定する。
次のステップS13においては、上記推定した車体速度Vから運転席方向可変車両が停車状態か否かをチェックし、走行状態であればここで待機し、運転席5の方向転換指令によっても、運転席5の方向を現在の向きに保つ。
【0037】
ステップS13で運転席方向可変車両が停車状態であると判定した場合、ステップS14で車両を走行禁止により停車状態に保って、運転席の方向変更制御を以下の通りに行う。
ステップS15においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出する。
次のステップS16においては、検出した現在における運転席5の向きが、ステップS11で検出した運転席指令方向に一致するか否かをチェックする。
【0038】
ステップS16で現在における運転席5の向きが運転席指令方向に一致しないと判定する場合は、ステップS17においてキャビン側車体2を中心鉛直線Oの周りに回転させるべく転向アクチュエータ11を駆動する。
【0039】
転向アクチュエータ11の駆動によりキャビン側車体2を中心鉛直線Oの周りに回転されて、運転席5の向きが運転者の望む運転席指令方向に一致するとき、ステップS16がステップS17をバイパスして制御をステップS18へ進めるため、
転向アクチュエータ11の駆動が停止され、キャビン側車体2の回転位置を、運転席5の向きが運転者の望む運転席指令方向に一致した回転位置に保つことができる。
【0040】
ステップS18においては、ステップS14で実行した車両の走行禁止を解除して、車両の走行を許可し、上記の通り運転席5の向きが運転者の望む運転席指令方向に一致した状態での走行を可能にする。
【0041】
<制動力配分制御>
コントローラ12は、ブレーキペダル踏み込み量Lbに応じた量だけマスターシリンダ駆動用リニヤアクチュエータ42をストロークさせて、マスターシリンダ41から対応するマスターシリンダ液圧Pmを出力させると同時に、図5の制御プログラムを実行して制動力配分制御を遂行する。
図5のステップS21においては、ブレーキペダル踏み込み量Lbおよび車両状態(図4により制御した運転席の向き、車輪3,4の回転速度Vw1,Vw2,Vw3,Vw4)を検出する。
次のステップS22においては、現在における運転席の向きに応じて図6にAoまたはBoで示す理想制動力配分特性に基づき目標とすべき前後制動力配分を算出する。
【0042】
図6にAoで示す理想制動力配分特性は、運転者が運転席を図1〜3に示すごとく走行方向一方側(A側)に向け、車輪3が前輪となり、反対側(B側)の車輪4が後輪となるような方向へ走行する場合に、A側車輪(前輪)3およびB側車輪(後輪)4が同時にロックするようなA側車輪(前輪)3およびB側車輪(後輪)4間の制動力配分特性である。
また図6にBoで示す理想制動力配分特性は、運転者が運転席を図1〜3にB側として図示する走行方向他方側に向け、B側車輪4が前輪となり、A側車輪3が後輪となるような逆方向へ走行する場合に、B側車輪(前輪)4およびA側車輪(後輪)3が同時にロックするようなB側車輪(前輪)4およびA側車輪(後輪)3間の制動力配分特性である。
【0043】
従って理想制動力配分特性Ao,Boはそれぞれ、制動時における走行方向前方への荷重移動によっても、後輪先ロック傾向をなくして車両の挙動安定性を保つことができると共に、輪荷重の増大により大きくなる実現可能な前輪制動力を使い切って要求通りの車両減速度を発生させることができるものである。
かかる理想特性Ao,Bo上の前後輪理想制動力配分(走行方向前側となる車輪の前輪制動力Bf、および走行方向後側となる車輪の後輪制動力Br)は、
車両減速度をα(減速度を正とする)とし、重力の加速度をGとし、車両のホイールベースをLとし、車両の重心高をhとし、車両重量をWとし、走行方向前側となる車輪の静止時輪荷重をWfoとし、走行方向後側となる車輪の静止時時輪荷重をWroとしたとき、次式により求めることができる。
Bf=(α/G){Wfo+W・(α/G)・(h/L)} ・・・(1)
Br=(α/G){Wro−W・(α/G)・(h/L)} ・・・(2)
【0044】
なお、図6にCで示すA側車輪3およびB側車輪4間の制動力配分特性は、図3におけるブレーキ液圧制御ユニット43,44を非作動状態に保ち、両系統の同じマスターシリンダ液圧Pmをそのまま摩擦制動ユニット29,30に供給したり、ブレーキ液圧制御ユニット43,44を同じ作動状態にして摩擦制動ユニット29,30へのブレーキ液圧を同じにした場合における制動力配分特性、つまり50:50の制動力配分特性であり、参考までに示したものである。
かかる50:50の制動力配分特性に関し理想制動力配分特性Ao,Boは線対称な特性となること勿論である。
【0045】
図5のステップS22において、目標とすべき前後制動力配分を算出するに当たっては、
現在の運転席方向から走行方向一方側(A側)が前方である走行時か、走行方向他方側(B側)が前方である走行時かを判定し、
A側が前方である時は、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きい制動力配分を目標制動力配分とし、
B側が前方である時は、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きい制動力配分を目標制動力配分とする。
【0046】
ステップS23においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から、現在における運転席5の向きを検出する。
従ってステップS23は、本発明における運転席方向検知手段に相当する。
次のステップS24においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0047】
ステップS24で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS25において制動力配分を、ステップS22で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、図3のブレーキ液圧制御ユニット43,44を作動させる。
【0048】
ステップS24で車輪側車体1のA側が車両前方となる運転方向でない、つまり車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS26において制動力配分を、ステップS22で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、図3のブレーキ液圧制御ユニット43,44を作動させる。
【0049】
従ってステップS24は、本発明における設定制動力配分切り替え手段に相当し、ステップS25およびステップS26は、本発明における制動手段に相当する。
【0050】
<第1実施例の作用効果>
上記のような制動力配分制御によれば、図7(a),(b)に示すように走行方向前方を車輪側車体1のB側からA側へと切り替えて走行する場合につき、図7,8を用いて説明すると、以下のごとき定量的な作用効果を達成することができる。
【0051】
第1実施例においては、図7(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合、A側車輪3およびB側車輪4間の制動力配分は、図6の理想特性Boに対応する図8の制動力配分特性Bo上の制動力配分から、図6の理想特性Aoに対応する図8の制動力配分特性Ao上の制動力配分へと切り替わり、
例えば図8の制動力配分特性Ao上のA1点における制動力配分となって、図7(a)に示すごとくA側車輪3では0.79Gの制動力が発生し、B側車輪4では0.21Gの制動力が発生するように切り替わる。
【0052】
かかる制動力配分の切り替わりBo→Aoにより、A側車輪3の制動力(0.79G)がB側車輪4の制動力(0.21G)よりも大きくなって大小関係が逆転することで、
走行方向前側のA側車輪3が制動時荷重移動により輪荷重を増大され、走行方向後側のB側車輪4が制動時荷重移動により輪荷重を低下されても、B側車輪4がA側車輪3より先にロックして挙動不安定になるのを回避することができる。
しかも、上記の制動力配分が理想特性Ao上のA1点における制動力配分であることから、輪荷重の増大により大きくなった前側車輪3が発生可能な制動力を最大限利用することができ、図7(a)に示すごとく、0.79G+0.21G=1.0Gもの大きな車両減速度αを得ることができる。
【0053】
なお上記の作用効果は、運転席方向の反転により走行方向前方をA側からB側へと切り替えた場合も、
A側車輪3およびB側車輪4間の制動力配分を、図6の理想特性Aoに対応する図8の制動力配分特性Ao上の制動力配分から、図6の理想特性Boに対応する図8の制動力配分特性Bo上の制動力配分へと切り替えることによって、同様に達成し得るのは言うまでもない。
【0054】
ところで、特許文献1に記載のように運転席の向きが不変の運転席方向固定車両にあっては、運転席が向いている側の車輪(B側車輪)4が常に前輪であることから、A側車輪3との間における摩擦制動による制動力配分が常に図8の制動力配分特性Bo上における制動力配分となるようブレーキ液圧を制御する。
従って、A側が走行方向前方となる車両後進中の制動時は、後進方向前側のA側車輪3が荷重移動により輪荷重を増大され、後進方向後側のB側車輪4が荷重移動により輪荷重を低下されるにもかかわらず、これに逆行するような制動力配分、つまりB側車輪4の制動力がA側車輪3の制動力よりも大きな制動力配分にすることとなり、
特性Boに沿った制動力配分制御を行わない場合よりも更に、B側車輪4の先ロック傾向(挙動不安定)を生ずるという問題が顕著になると共に、A側車輪3が発生可能な制動力を十分に使い切ることができず、期待通りの車両減速度を得られないという問題が顕著になる。
【0055】
そこで特許文献1に記載の前記した提案技術を応用し、A側が走行方向前方となる車両走行中の制動時に、走行方向前側車輪であるA側車輪3の荷重増加に応じたモータ回生制動力を当該車輪3に付加した場合の制動力配分を、上記した第1実施例との比較例として以下に説明する。
【0056】
図8の制動力配分特性Bo上におけるB1点(A側車輪3の制動力=0.1G、B側車輪4の制動力=0.18G)での摩擦制動時を考察する。
この摩擦制動に伴って生ずるA側車輪3の荷重増加に応じたモータ回生制動力をA側車輪3に付加することが特許文献1に記載の前記した提案技術の趣旨であるが、
通常4輪モータ駆動式電気自動車においては、A側またはB側のいずれかで発生可能な回生制動力は高く見積もっても0.4G程度が限度である。
【0057】
車両の挙動安定性を考慮して、A側車輪3およびB側車輪4間の制動力配分を理想制動力配分特性Ao上のもの、若しくはこれに近いものにしようとすると、最大回生制動力0.4Gでは、A側車輪3の制動力は図8に示すように0.1Gから、理想制動力配分特性Ao上のA2点における0.5G程度までしか増大させることができない。
【0058】
結果として図7(b)に示すように、A側車輪3による制動力は0.5Gとなり、B側車輪4による制動力は0.18Gとなり、この制動力配分が理想制動力配分特性Ao上のものであることから、B側車輪4の先ロック(挙動不安定)は防止し得るものの、
車両減速度αは、A側車輪3の制動力=0.5Gと、B側車輪4の制動力=0.18Gとの和値である0.68G程度しか得られない。
【0059】
しかし第1実施例によれば、図7(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合でも、逆に走行方向前方をA側からB側へと切り替えた場合でも、A側車輪3およびB側車輪4間の制動力配分を、走行方向前側車輪の制動力が走行方向後側車輪の制動力より大きくなるような制動力配分に切り替えるため、
走行方向前側車輪が制動時荷重移動により輪荷重を増大され、走行方向後側車輪が制動時荷重移動により輪荷重を低下されても、後側車輪が前側車輪より先にロックして挙動不安定になるのを回避することができると共に、
輪荷重の増大により大きくなった前側車輪で発生可能な制動力を最大限利用することができ、運転者が所望する通りの大きな車両減速度αを得ることができる。
【0060】
なお本実施例のように、各ブレーキ液圧制御ユニット43,44を、各摩擦制動ユニット29,31とともに、全てが同仕様のものとし、ブレーキ液圧系41a,41bも全てが同仕様のものとすることで、A側車輪3の液圧制動システムとB側車輪4の液圧制動システムとを同仕様に構成する場合、
制動力配分制御を切り替えるのみで、制動システムの構成を単純化しつつ、上記諸々の作用効果を達成することができる。
【0061】
また運転席方向可変車両を、運転席方向の切り替えによっても車両の走行方向前後における重量配分が変わらないような車両とし、これに対し本実施例の制動装置を適用するようにするのがよく、この場合、制御パラメータの設定なども単純化しつつ、上記諸々の作用効果を達成することができる。
【0062】
<第2実施例>
図9,10は、本発明の第2実施例になる制動装置を示し、図9は、図3に対応する制動システム図、図10は、図5に対応する制動力配分制御のプログラムを示すフローチャートである。
本実施例においても、運転席方向可変車両は図1,2につき前述したと同様なものとし、図9において、図1,2におけると同様な部品には同一符号を付して示した。
しかし車両の制動を常時、図9から明らかなように、マスターシリンダ41および制動ユニット29,31による摩擦制動と、車輪駆動モータ21,22による回生制動との協調制御により実行して、目標制動力配分と要求減速度とを達成するようになす。
【0063】
そのため、ブレーキ液圧系41a,41bから、図3におけるブレーキ液圧制御ユニット43,44を排除し、これにより常に、ブレーキ液圧系41a,41bへの同じマスターシリンダ液圧Pmがそのまま摩擦制動ユニット29,30へ供給されて、A側車輪3の摩擦制動力とB側車輪4の摩擦制動力とが常に同じになるようにする。
かかる摩擦制動によるA側車輪3およびB側車輪4間の制動力配分特性は図11にCで示すように、図6に同符号Cで示すと同様な50:50の制動力配分特性となる。
【0064】
本実施例においては、かかる制動力配分特性Cを呈する摩擦制動との協調制御により、車輪駆動モータ21,22による回生制動が目標制動力配分と要求減速度とを達成し得るようになすため、
コントローラ12が車輪駆動モータ21,22を電動機として作動させるよう車輪駆動モータ21,22に要求駆動力対応の駆動負荷を指令するほかに、車輪駆動モータ21,22を発電機として作動させるよう車輪駆動モータ21,22に回生制動力対応の発電負荷を指令するように構成する。
なお車輪駆動モータ21,22による回生制動制御は、液圧制御である摩擦制動力制御よりも高応答で、本実施例の制動装置は前記した第1実施例の制動装置よりも、制御応答性の点において優れる。
【0065】
かかる車輪駆動モータ21,22への発電負荷指令は、マスターシリンダ駆動用リニヤアクチュエータ42のストローク制御とともに、コントローラ12でこれらを実行するものとする。
そのためコントローラ12には、
ブレーキペダル32の踏み込み量Lb(車両の要求減速度)を検出するブレーキペダル踏み込みセンサ45からの信号と、
車輪駆動モータ21,22に内蔵されてその回転速度Vmを検出するモータ回転速度センサ(図示せず)からの信号とをそれぞれ入力する。
【0066】
コントローラ12は、これら入力情報および内部情報を基に、運転席方向制御および制動力配分制御を行うが、前者の運転席方向制御は図4につき前述したと同じであるため、ここではその説明を省略した。
【0067】
<制動力配分制御>
コントローラ12は、ブレーキペダル踏み込み量Lbに応じた量だけマスターシリンダ駆動用リニヤアクチュエータ42をストロークさせて、マスターシリンダ41から対応するマスターシリンダ液圧Pmを出力させることにより、各車輪3,4を図11の制動力配分特性Cとなるよう摩擦制動すると同時に、図10の制御プログラムを実行して制動力配分制御を遂行する。
【0068】
図10のステップS31においては、ブレーキペダル踏み込み量Lbおよび車両状態(図4により制御した運転席の向き、車輪駆動モータ21,22の回転速度Vm)を検出する。
次のステップS32においては、現在における運転席の向きに応じて図6にAoまたはBoで示す理想制動力配分特性に基づき目標とすべき前後制動力配分を算出する。
【0069】
ステップS32で、目標とすべき前後制動力配分を算出するに当たっては、
現在の運転席方向から走行方向一方側(A側)が前方である走行時か、走行方向他方側(B側)が前方である走行時かを判定し、
A側が前方である時は、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きい制動力配分を目標制動力配分とし、
B側が前方である時は、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きい制動力配分を目標制動力配分とする。
【0070】
ステップS33においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出する。
従ってステップS33は、本発明における運転席方向検知手段に相当する。
次のステップS34においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0071】
ステップS34で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS35において制動力配分を、ステップS32で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3に回生制動力を付加して(A側車輪3の車輪駆動モータ21に回生制動力相当の発電負荷を指令して)、当該A側車輪(前輪)3の制動力を前記した摩擦制動力と回生制動力との和値となす。
【0072】
なお、A側車輪(前輪)3に付加すべき目標回生制動力と、車輪駆動モータ21が発生可能な最大回生制動力とを比較し、前者の目標回生制動力が後者の発生可能最大回生制動力よりも大きい場合は、
A側車輪(前輪)3に付加する回生制動力を発生可能最大回生制動力とすべく、A側車輪3の車輪駆動モータ21に発生可能最大回生制動力相当の発電負荷を指令するものとする。
【0073】
ステップS34で車輪側車体1のA側が車両前方となる運転方向でない、つまり車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS36において制動力配分を、ステップS32で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4に回生制動力を付加して(B側車輪4の車輪駆動モータ22に回生制動力相当の発電負荷を指令して)、当該B側車輪(前輪)4の制動力を前記した摩擦制動力と回生制動力との和値となす。
【0074】
なお、B側車輪(前輪)4に付加すべき目標回生制動力と、車輪駆動モータ22が発生可能な最大回生制動力とを比較し、前者の目標回生制動力が後者の発生可能最大回生制動力よりも大きい場合は、
B側車輪(前輪)4に付加する回生制動力を発生可能最大回生制動力とすべく、B側車輪(前輪)4の車輪駆動モータ21に発生可能最大回生制動力相当の発電負荷を指令するものとする。
【0075】
従ってステップS34は、本発明における設定制動力配分切り替え手段に相当し、ステップS35およびステップS36は、本発明における制動手段に相当する。
【0076】
<第2実施例の作用効果>
上記のような第2実施例の制動力配分制御によれば、以下のような作用効果が奏し得られる。
つまり摩擦制動力制御(ブレーキ液圧制御)が不要で、モータ21,22への発電負荷制御(回生制動力制御)のみにより第1実施例と同様な作用効果が得られるため、システムの簡易化を図ることができると共に、発電負荷制御(回生制動力制御)が摩擦制動力制御(ブレーキ液圧制御)よりも高応答かつ高精度であるため制動力配分制御の応答性および制御精度を飛躍的に改善させることができる。
【0077】
また第2実施例の制動力配分制御によれば、図12(a),(b)に示すように走行方向前方を車輪側車体1のB側からA側へと切り替えて走行する場合につき、図11,12を用いて説明すると、以下のごとき定量的な作用効果を達成することができる。
【0078】
つまり、図12(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合、A側車輪3およびB側車輪4間の制動力配分は、図6の理想特性Boに対応する制動力配分特性(図11では省略した)上の制動力配分から、図6の理想特性Aoに対応する図11の制動力配分特性Ao上の制動力配分へと切り替わり、
摩擦制動力配分特性(50:50)C上における例えばC1点(A側車輪3の摩擦制動力=0.205G、B側車輪4の摩擦制動力=0.205G)での制動時であれば、C1点におけるA側車輪3の摩擦制動力(0.205G)に例えば最大回生制動力0.4Gを付加して(ステップS35)、図11の制動力配分特性Ao上のA1点における制動力配分となし、図12(a)に示すごとくA側車輪3では0.605Gの制動力が発生し、B側車輪4では0.205Gの制動力が発生するように切り替わる。
【0079】
かかる制動力配分のAoへの切り替わりにより、A側車輪3の制動力(0.605G)がB側車輪4の制動力(0.205G)よりも大きくなって大小関係が逆転することで、
走行方向前側のA側車輪3が制動時荷重移動により輪荷重を増大され、走行方向後側のB側車輪4が制動時荷重移動により輪荷重を低下されても、B側車輪4がA側車輪3より先にロックして挙動不安定になるのを回避することができる。
しかも、上記の制動力配分が理想特性Ao上のA1点における制動力配分であることから、輪荷重の増大により大きくなった前側車輪3が発生可能な制動力を最大限利用することができ、図12(a)に示すごとく、0.605G+0.205G=0.810Gのごとき大きな車両減速度αを得ることができる。
【0080】
なお上記の作用効果は、運転席方向の反転により走行方向前方をA側からB側へと切り替えた場合も、A側車輪3およびB側車輪4間の制動力配分を、図6の理想特性Aoに対応する図11の制動力配分特性Ao上における制動力配分から、図6の理想特性Boに対応する制動力配分特性(図8では省略した)上の制動力配分へと切り替えることにより、同様に達成し得るのは言うまでもない。
【0081】
ところで、特許文献1に記載の前記した提案技術を応用し、A側が走行方向前方となる車両走行中の制動時に、走行方向前側車輪であるA側車輪3の荷重増加に応じたモータ回生制動力を当該車輪3に付加した場合の制動力配分(これを、上記した第2実施例との比較例とする)は、図8につき前述した通り、図11の制動力配分特性Ao上におけるA2点(A側車輪3の摩擦制動力=0.5G、B側車輪4の摩擦制動力=0.18G)の制動力配分である。
【0082】
その結果として図12(b)に示すように、A側車輪3による制動力は0.5Gとなり、B側車輪4による制動力は0.18Gとなり、この制動力配分が理想制動力配分特性Ao上のものであることから、B側車輪4の先ロック(挙動不安定)は防止し得るものの、
車両減速度αは、A側車輪3の制動力=0.5Gと、B側車輪4の制動力=0.18Gとの和値である0.68G程度しか得られない。
【0083】
しかし第2実施例によれば、図12(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合でも、逆に走行方向前方をA側からB側へと切り替えた場合でも、A側車輪3およびB側車輪4間の制動力配分を、走行方向前側車輪の制動力が回生制動力の付加により走行方向後側車輪の制動力より大きくなるような制動力配分に切り替えるため、
走行方向前側車輪が制動時荷重移動により輪荷重を増大され、走行方向後側車輪が制動時荷重移動により輪荷重を低下されても、後側車輪が前側車輪より先にロックして挙動不安定になるのを回避することができると共に、
輪荷重の増大により大きくなった前側車輪で発生可能な制動力を、第1実施例ほどではないにしても、できるだけ利用して大きな車両減速度αを発生させることができる。
【0084】
なお第2実施例であっても、車両重心が低く(前記した車両重心高hが小さく)、前記したホイールベースLが長い運転席方向可変車両に適用する場合、前記(1),(2)式から明らかなように車両減速度αを、第1実施例と同程度の大きさにすることができるのは言うまでもない。
【0085】
<第3実施例>
図13は、本発明の第3実施例になる制動装置の制動力配分制御プログラムを示し、図5,10に対応するフローチャートである。
本実施例において、運転席方向可変車両は図1,2につき前述したと同様なものとし、車両の制動システムは図9につき前述したと同様なもの、つまりマスターシリンダ41および制動ユニット29,31による摩擦制動と、車輪駆動モータ21,22による回生制動との協調制御により目標制動力配分と要求減速度とを達成するものとする。
【0086】
なお、本実施例において図9のコントローラ12は、運転席方向制御および制動力配分制御を行うが、前者の運転席方向制御は図4につき前述したと同じであるため、ここではその説明を省略し、
ここでは、図9のコントローラ12が図13の制御プログラムに沿って実行する制動力配分制御のみにつき、図14,15を参照しつつ以下に説明する。
【0087】
<制動力配分制御>
図9のコントローラ12は、ブレーキペダル踏み込み量Lbに応じた量だけマスターシリンダ駆動用リニヤアクチュエータ42をストロークさせて、マスターシリンダ41から対応するマスターシリンダ液圧Pmを出力させることにより、各車輪3,4を図15の制動力配分特性Cとなるよう摩擦制動すると同時に、図13の制御プログラムを実行して制動力配分制御を遂行する。
【0088】
図13のステップS41においては、ブレーキペダル踏み込み量Lbおよび車両状態(図4により制御した運転席の向き、車輪駆動モータ21,22の回転速度Vm)を検出する。
次のステップS42においては、現在における運転席の向きに応じて図6にAoまたはBoで示す理想制動力配分特性に基づき目標とすべき前後制動力配分を算出する。
【0089】
ステップS42で、目標とすべき前後制動力配分を算出するに当たっては、
現在の運転席方向から走行方向一方側(A側)が前方である走行時か、走行方向他方側(B側)が前方である走行時かを判定し、
A側が前方である時は、図6にAoで示す理想制動力配分特性に一致もしくは近づくよう、A側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きい制動力配分を目標制動力配分とし、
B側が前方である時は、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、B側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きい制動力配分を目標制動力配分とする。
【0090】
ステップS43においては、ブレーキペダル踏み込み量Lbおよび車輪駆動モータ21,22の回転速度Vmから車両の要求減速度αを推定すると共に、この要求減速度αを用いて以下のごとくに摩擦制動力Bbrakeを求めて推定する。
この摩擦制動力Bbrakeを求めるに当たっては、先ず上記の要求減速度αを前記(1)式に代入することにより、この要求減速度αを実現するための、図6の理想制動力配分特性Ao(Bo)上における走行方向前側車輪の目標前輪制動力Bfを求め、この目標前輪制動力Bfから、走行方向前側車輪の車輪駆動モータ21または22が発生可能な最大回生制動力Bmfmaxを差し引くことにより走行方向前側の摩擦制動力Bbrakeを求める。
【0091】
図15(a),(b) に示すごとく車輪側車体1のA側が走行方向前方である場合につき、上記摩擦制動力Bbrakeの求め方を説明するに、
先ず要求減速度αを前記(1)式に代入して、この要求減速度αを実現するための、図14の理想制動力配分特性Ao(図6の理想制動力配分特性Aoに同じ)上における走行方向前側車輪(A側車輪3)の目標前輪制動力Bf(例えば図14のA1点での0.79G)を求め、この目標前輪制動力Bfから、A側車輪3の車輪駆動モータ21が発生可能な最大回生制動力Bmfmax(図14では0.4G)を差し引くことによりA側車輪の摩擦制動力Bbrake(図14では0.39G)を求める。
なお図14にも示すが、走行方向後側におけるB側車輪の摩擦制動力も、Bbrake=0.39Gに対応した、摩擦制動力配分特性C上の点C1における値であることから、A側車輪の摩擦制動力Bbrake(0.39G)と同じである。
【0092】
上記のように摩擦制動力Bbrakeを求めるのは、図14の場合のように目標前輪制動力Bfが最大回生制動力Bmfmaxよりも大きい(Bf>Bmfmaxである)ときであって、この場合(Bf>Bmfmaxの場合)は、上記のように
摩擦制動力Bbrakeを、Bbrake=Bf−Bmfmaxと見なすと同時に、
前側車輪駆動モータ21または22で発生させる回生制動力Bmfを、Bmf=Bmfmaxと見なす。
【0093】
しかし、逆に最大回生制動力Bmfmaxが目標前輪制動力Bf以上である場合(Bf≦Bmfmaxの場合)は、目標前輪制動力Bfの全てを回生制動のみで賄い得ることから、
摩擦制動力Bbrakeを、Bbrake=0と見なすと同時に、
前側車輪駆動モータ21または22で発生させる回生制動力Bmfを、Bmf=Bfと見なす。
【0094】
次のステップS44においては、ステップS43で推定した車両の要求減速度αを前記(2)式に代入することにより、この要求減速度αを実現するための、図6の理想制動力配分特性Ao(Bo)上における走行方向後側車輪の目標後輪制動力Brを算出する。
従ってステップS44は、本発明における目標後輪制動力演算手段に相当する。
【0095】
ステップS45においては、ステップS43で求めた摩擦制動力Bbrakeと、ステップS44で算出した目標後輪制動力Brとを対比し、前者の摩擦制動力Bbrakeが後者の目標後輪制動力Br以下(Bbrake≦Br)か、それとも前者の摩擦制動力Bbrakeが後者の目標後輪制動力Brを越えている(Bbrake> Br)かをチェックする。
かかる摩擦制動力Bbrakeおよび目標後輪制動力Brの対比は、図15(a),(b) のように車輪側車体1のA側が走行方向前方であって、第3実施例の制動装置が図14の理想制動力配分特性Ao上におけるA1点での制動力配分制御を行う場合につき説明すると、
図14の縦軸(B側車輪4の制動力)上における摩擦制動力Bbrakeと目標後輪制動力Brとを比較することである。
【0096】
Bbrake> Brであるということは、図14に示すように摩擦制動力Bbrakeが理想制動力配分特性Ao上の点A1における目標後輪制動力Brよりも大きくて、走行方向後側(図14の場合、B側車輪4)の制動力が理想制動力配分実現値よりも大きく、車両の挙動を不安定にすることを意味する。
逆にBbrake≦Brであるということは、摩擦制動力Bbrakeが目標後輪制動力Br以下であって、走行方向後側車輪の制動力が理想制動力配分実現値以下であるため、車両の挙動を不安定にすることはないが、摩擦制動力Bbrakeおよび目標後輪制動力Br間の差分だけ当該車輪の制動力が目標値に対して不足することを意味する。
【0097】
そこで、ステップS45においてBbrake≦Brと判定するときは、走行方向後側車輪の上記制動力不足を補うため、制御をステップS46〜ステップS49に進める。
ステップS46においては、図4により制御した運転席5の向きを検出する。
従ってステップS46は、本発明における運転席方向検知手段に相当する。
次のステップS47においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0098】
ステップS47で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS48において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6,14にAoで示す理想制動力配分特性に一致もしくは近づくよう、
A側車輪3に対し前輪に必要な回生制動力Bmf(図14では最大回生制動力Bmfmax)を付加して(A側車輪3の車輪駆動モータ21に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該A側車輪(前輪)3の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
B側車輪4に対し後輪に必要な回生制動力Bmr=(Br−Bbrake)≧0を付加して(B側車輪4の車輪駆動モータ22に後輪用の回生制動力Bmr相当の発電負荷を指令して)、当該B側車輪(後輪)4の制動力Brを前記した摩擦制動力Bbrakeと上記回生制動力Bmrとの和値となす。
【0099】
ステップS47で車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS49において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、
B側車輪4に対し前輪に必要な回生制動力Bmfを付加して(B側車輪4の車輪駆動モータ22に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該B側車輪(前輪)4の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
A側車輪3に対し後輪に必要な回生制動力Bmr=(Br−Bbrake)≧0を付加して(A側車輪3の車輪駆動モータ21に後輪用の回生制動力Bmr相当の発電負荷を指令して)、当該A側車輪(後輪)3の制動力Brを前記した摩擦制動力Bbrakeと上記回生制動力Bmrとの和値となす。
【0100】
ステップS45で、図14に例示したごとくにBbrake>Brであると判定するときは、走行方向後側車輪の前記制動力過大(これによる車両挙動の不安定)を解消するため、制御をステップS51〜ステップS54に進める。
ステップS51においては、図4により制御した運転席5の向きを検出する。
従ってステップS51は、本発明における運転席方向検知手段に相当する。
次のステップS52においては、検出した現在における運転席5の向きから、車輪側車体1のA側が車両前方となる運転方向か否かを判定する。
【0101】
ステップS52で車輪側車体1のA側が車両前方となる運転方向であると判定するときは、ステップS53において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりA側車輪(前輪)3の制動力の方がB側車輪(後輪)4の制動力よりも大きくなり、図6,14にAoで示す理想制動力配分特性に一致もしくは近づくよう、
A側車輪3に対し前輪に必要な回生制動力Bmf(図14では、最大回生制動力Bmfmax)を付加して(A側車輪3の車輪駆動モータ21に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該A側車輪(前輪)3の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
B側車輪4に対し、前記した後輪の制動力過大(これによる車両挙動の不安定)を解消するために必要なモータ駆動力Bmr=Br−Bbrake(Bmrは、図14に例示するような負値)を付加して(B側車輪4の車輪駆動モータ22に後輪制動力過大解消用のモータ駆動力Bmr相当の駆動負荷を指令して)、当該B側車輪(後輪)4の制動力Brを図14に例示するように、前記した摩擦制動力Bbrakeよりも上記モータ駆動力分Bmrだけ小さな値となす。
【0102】
ステップS52で車輪側車体1のB側が車両前方となる運転方向であると判定するときは、ステップS54において制動力配分を、ステップS42で求めた目標制動力配分となすよう、つまりB側車輪(前輪)4の制動力の方がA側車輪(後輪)3の制動力よりも大きくなり、図6にBoで示す理想制動力配分特性に一致もしくは近づくよう、
B側車輪4に対し前輪に必要な回生制動力Bmfを付加して(B側車輪4の車輪駆動モータ22に前輪用の回生制動力Bmf相当の発電負荷を指令して)、当該B側車輪(前輪)4の制動力Bfを前記した摩擦制動力Bbrakeと上記回生制動力Bmfとの和値となすと共に、
A側車輪3に対し、前記した後輪の制動力過大(これによる車両挙動の不安定)を解消するために必要なモータ駆動力Bmr=Br−Bbrake(Bmr<0)を付加して(A側車輪3の車輪駆動モータ21に後輪制動力過大解消用のモータ駆動力Bmr相当の駆動負荷を指令して)、当該A側車輪(後輪)3の制動力Brを、前記した摩擦制動力Bbrakeよりも上記モータ駆動力分Bmrだけ小さな値となす。
【0103】
従ってステップS47およびステップS52は、本発明における設定制動力配分切り替え手段に相当し、ステップS48およびステップS49と、ステップS53およびステップS54とはそれぞれ、本発明における制動手段に相当する。
【0104】
<第3実施例の作用効果>
上記のような第3実施例の制動力配分制御によれば、以下のような作用効果が奏し得られる。
つまり、図15(a),(b)に示すように走行方向前方を車輪側車体1のB側からA側へと切り替えて走行する場合につき、図14,15を用いて説明すると、以下のごとき定量的な作用効果を達成することができる。
【0105】
つまり、図15(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合、A側車輪3およびB側車輪4間の制動力配分は、図6の理想特性Boに対応する制動力配分特性(図14では省略した)上の制動力配分から、図6の理想特性Aoに対応する図14の制動力配分特性Ao上の制動力配分へと切り替わり、
摩擦制動力配分特性(50:50)C上における例えばC1点(A側車輪3の摩擦制動力Bbrake=0.39G、B側車輪4の摩擦制動力Bbrake=0.39G)での制動時であれば、C1点におけるA側車輪3の摩擦制動力(0.39G)に回生制動力Bmf(図14では最大回生制動力Bmfmax=0.4G)を付加すると共に、C1点におけるB側車輪4の摩擦制動力(0.39G)にモータ駆動力Bmr(=Br−Bbrake、図14ではBmr=−0.18G)を付加して(ステップS53)、図14の制動力配分特性Ao上のA1点における制動力配分となし、図15(a)に示すごとくA側車輪3ではBf=0.79G(摩擦制動力Bbrake=0.39Gと、回生制動力Bmf=0.4Gとの和値)の制動力が発生し、B側車輪4ではBr=0.21G(摩擦制動力Bbrake=0.39Gと、モータ駆動力Bmr=−0.18Gとの和値)の制動力が発生するように切り替わる。
【0106】
かかる制動力配分のAoへの切り替わりにより、A側車輪3の制動力Bf(0.79G)がB側車輪4の制動力(0.21G)よりも大きくなって大小関係が逆転することで、
走行方向前側のA側車輪3が制動時荷重移動により輪荷重を増大され、走行方向後側のB側車輪4が制動時荷重移動により輪荷重を低下されても、B側車輪4がA側車輪3より先にロックして挙動不安定になるのを回避することができる。
しかも、上記の制動力配分が理想特性Ao上のA1点における制動力配分であることから、輪荷重の増大により大きくなった前側車輪3が発生可能な制動力を最大限利用することができ、図15(a)に示すごとく、0.79G+0.21G=1.0Gのごとき大きな車両減速度αを得ることができる。
【0107】
なお上記の作用効果は、運転席方向の反転により走行方向前方をA側からB側へと切り替えた場合も、A側車輪3およびB側車輪4間の制動力配分をステップS54の実行により、図6の理想特性Aoに対応する図14の制動力配分特性Ao上における制動力配分から、図6の理想特性Boに対応する制動力配分特性(図14では省略した)上の制動力配分へと切り替えることにより、同様に達成し得るのは言うまでもない。
【0108】
ところで、特許文献1に記載の前記した提案技術を応用し、A側が走行方向前方となる車両走行中の制動時に、走行方向前側車輪であるA側車輪3の荷重増加に応じたモータ回生制動力を当該車輪3に付加した場合の制動力配分(これを、上記した第3実施例との比較例とする)は、図8につき前述した通り、図14の制動力配分特性Ao上におけるA2点(A側車輪3の摩擦制動力=0.5G、B側車輪4の摩擦制動力=0.18G)の制動力配分である。
【0109】
その結果として図15(b)に示すように、A側車輪3による制動力は0.5Gとなり、B側車輪4による制動力は0.18Gとなり、この制動力配分が理想制動力配分特性Ao上のものであることから、B側車輪4の先ロック(挙動不安定)は防止し得るものの、
車両減速度αは、A側車輪3の制動力=0.5Gと、B側車輪4の制動力=0.18Gとの和値である0.68G程度しか得られない。
【0110】
しかし第3実施例によれば、図15(a),(b)に示すように走行方向前方をB側からA側へと切り替えた場合でも、逆に走行方向前方をA側からB側へと切り替えた場合でも、A側車輪3およびB側車輪4間の制動力配分を、ステップS48またはステップS49およびステップS53またはステップS54での回生制動力の付加やモータ駆動力の付加により走行方向前側車輪の制動力が走行方向後側車輪の制動力より大きくなるような制動力配分に切り替えるため、
走行方向前側車輪が制動時荷重移動により輪荷重を増大され、走行方向後側車輪が制動時荷重移動により輪荷重を低下されても、後側車輪が前側車輪より先にロックして挙動不安定になるのを回避することができると共に、
輪荷重の増大により大きくなった前側車輪で発生可能な制動力を可能な限り利用して、大きな車両減速度αを発生させることができる。
【0111】
しかも第3実施例によれば、摩擦制動力Bbrakeがそれ単独で走行方向後側車輪を走行方向前側車輪よりも先にロックさせる過大なものである場合(ステップS45)、走行方向後側車輪へ回生動力に代えて、制動力過大分に相当するモータ駆動力を付加するようにしたため(ステップS53およびステップS54)、
このように摩擦制動力Bbrakeが過大になる制動時も、走行方向後側車輪の制動力を、当該後輪が走行方向前側車輪よりも先にロックすることのない大きさに抑制することができ、後輪先ロックによる挙動不安定を回避することができる。
【0112】
また走行方向前側車輪の制動力を、理想制動力配分特性上の目標前輪制動力となるよう制御するため、
制動時荷重移動により輪荷重が増大して発生可能な制動力が大きくなる前側車輪の制動力を最大限利用して、十分な車両減速度を確保することができる。
よって、かかる十分な車両減速度の確保と、上記した後輪先ロックの回避(車両の挙動不安定の回避)とを高度に両立させることができる。
【0113】
<その他の実施例>
なお上記した第1実施例〜第3実施例ではいずれも、図1,2に示すように、軸受9を介しキャビン側車体2をその中心鉛直線Oの周りに回転可能にして車輪側車体1上に載置し、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してキャビン側車体2の転向を行うこととしたが、
キャビン側車体2の転向機構は、これに限られるものでなく任意の構造のものにし得るし、またキャビン側車体2の転向も、キャビン側車体2が両方向へ正逆回転することで当該転向を行うものに限らず、一方向へのみ回転することで当該転向を行うものであってもよい。
【0114】
また車輪3,4の駆動方式についても、図1,2に示すように各車輪3,4ごとに車輪駆動モータ21,22を設け、各車輪3,4を個々の車輪駆動モータ21,22で駆動するようにした所謂インホイールモータ式のものに限られず、
車輪側車体1の走行方向一方側および他方側にそれぞれ1つずつ車輪駆動モータを設けて、対応する側における左右一対の車輪3,4を共通なモータで駆動するようにした車輪駆動方式でもよいし、
全輪3,4に共通な1個のモータを設けて、これによりディファレンシャルギヤ装置およびドライブシャフトを介し全輪3,4を駆動するようにした車輪駆動方式でもよい。
【0115】
更に、第1実施例では液圧ブレーキシステムを図3に示すように、4センサ・4チャンネルのX配管式液圧ブレーキシステムとし、ブレーキペダル踏み込み量Lbに応じたマスターシリンダ圧Pmを基に各車輪3,4へのブレーキ液圧をユニット43,44で電子制御することとしたが、車輪側車体1の走行方向一方側および他方側における車輪3,4の制動力配分を制御可能なシステムであれば、いかなる構成のブレーキシステムであってもよく、例えば前後スプリット式液圧ブレーキシステムでもよい。
【0116】
また第1実施例における図3に示した車輪速センサ46,47は、車輪3,4の駆動方式が図1〜3に示すようにインホイールモータ式のものである場合、車輪駆動モータ21,22の回転速度を検出するモータ回転センサに置換してもよく、この場合モータ回転センサは対応する個々の車輪3,4に内蔵させるのが有利である。
【符号の説明】
【0117】
1 車輪側車体
2 キャビン側車体
3 走行方向一方側の左右輪
4 走行方向他方側の左右輪
5 運転席
6 コクピットモジュール
7 乗員席
8 キャビン
9 キャビン側車体支承軸受
11 転向アクチュエータ
12 コントローラ
21,22 車輪駆動モータ
23 バッテリ
24,25 車輪駆動制御ユニット
26 ステアリングホイール
27,28 操舵アクチュエータ
29,31 摩擦制動ユニット
32 ブレーキペダル
41 マスターシリンダ
42 マスターシリンダ駆動用リニヤアクチュエータ
43,44 ブレーキ液圧制御ユニット
45 ブレーキペダル踏み込みセンサ
46,47 車輪速センサ
【特許請求の範囲】
【請求項1】
車輪を懸架されて該車輪の駆動および制動により走行および停止が可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも前記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう前記車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両において、
前記運転席が前記車輪側車体の走行方向一方側および走行方向他方側のいずれ側に向いているのかを検出する運転席方向検知手段と、
前記車輪側車体の走行方向一方側に近い走行方向一方側車輪の制動力および前記車輪側車体の走行方向他方側に近い走行方向他方側車輪の制動力間における制動力配分を設定制動力配分となるよう制御しつつ前記車輪の制動を司る制動手段と、
前記運転席方向検知手段で検出した運転席の向きに応じて前記設定制動力配分を異ならせる設定制動力配分切り替え手段とを具備してなることを特徴とする運転席方向可変車両の制動装置。
【請求項2】
請求項1に記載された運転席方向可変車両の制動装置において、
前記設定制動力配分切り替え手段は、前記走行方向一方側車輪および走行方向他方側車輪のうち、運転席が向いている側における前輪の制動力が反対側における後輪の制動力よりも大きくなるような設定制動力配分に切り替えるものであることを特徴とする運転席方向可変車両の制動装置。
【請求項3】
請求項1または2に記載された運転席方向可変車両の制動装置において、
前記制動手段は、前記走行方向一方側車輪の制動システムと、前記走行方向他方側車輪の制動システムとが同仕様のものであることを特徴とする運転席方向可変車両の制動装置。
【請求項4】
請求項3に記載された運転席方向可変車両の制動装置において、
前記制動手段は、摩擦制動により全車輪を同じ制動力で制動する摩擦制動手段と、回生制動により前記走行方向一方側車輪および前記走行方向他方側車輪を個別制御下に制動する回生制動手段とより成り、回生制動制御により前記走行方向一方側車輪および走行方向他方側車輪間の制動力配分を前記設定制動力配分となるよう制御するものであることを特徴とする運転席方向可変車両の制動装置。
【請求項5】
請求項4に記載された運転席方向可変車両の制動装置において、
車両の前後加速度を検出する前後加速度検出手段と、
該手段で検出した前後加速度から前記後輪の目標制動力を求める目標後輪制動力演算手段とを設け、
前記回生制動制御は、前記後輪の摩擦制動力が前記後輪の目標制動力よりも上回るとき、回生制動用モータから前記後輪へ、回生制動力に代えてモータ駆動力を向かわせるものであることを特徴とする運転席方向可変車両の制動装置。
【請求項6】
請求項5に記載された運転席方向可変車両の制動装置において、
前記後輪の目標制動力は、前後輪が同時にロックする前後輪理想制動力配分特性上の目標後輪制動力とし、
前記前輪の制動力を、前記前後輪理想制動力配分特性上の目標前輪制動力となるよう制御するものであることを特徴とする運転席方向可変車両の制動装置。
【請求項7】
請求項6に記載された運転席方向可変車両の制動装置において、
前記回生制動用モータから後輪へのモータ駆動力は、前記後輪の摩擦制動力および目標後輪制動力間の制動力差であることを特徴とする運転席方向可変車両の制動装置。
【請求項1】
車輪を懸架されて該車輪の駆動および制動により走行および停止が可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも前記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう前記車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両において、
前記運転席が前記車輪側車体の走行方向一方側および走行方向他方側のいずれ側に向いているのかを検出する運転席方向検知手段と、
前記車輪側車体の走行方向一方側に近い走行方向一方側車輪の制動力および前記車輪側車体の走行方向他方側に近い走行方向他方側車輪の制動力間における制動力配分を設定制動力配分となるよう制御しつつ前記車輪の制動を司る制動手段と、
前記運転席方向検知手段で検出した運転席の向きに応じて前記設定制動力配分を異ならせる設定制動力配分切り替え手段とを具備してなることを特徴とする運転席方向可変車両の制動装置。
【請求項2】
請求項1に記載された運転席方向可変車両の制動装置において、
前記設定制動力配分切り替え手段は、前記走行方向一方側車輪および走行方向他方側車輪のうち、運転席が向いている側における前輪の制動力が反対側における後輪の制動力よりも大きくなるような設定制動力配分に切り替えるものであることを特徴とする運転席方向可変車両の制動装置。
【請求項3】
請求項1または2に記載された運転席方向可変車両の制動装置において、
前記制動手段は、前記走行方向一方側車輪の制動システムと、前記走行方向他方側車輪の制動システムとが同仕様のものであることを特徴とする運転席方向可変車両の制動装置。
【請求項4】
請求項3に記載された運転席方向可変車両の制動装置において、
前記制動手段は、摩擦制動により全車輪を同じ制動力で制動する摩擦制動手段と、回生制動により前記走行方向一方側車輪および前記走行方向他方側車輪を個別制御下に制動する回生制動手段とより成り、回生制動制御により前記走行方向一方側車輪および走行方向他方側車輪間の制動力配分を前記設定制動力配分となるよう制御するものであることを特徴とする運転席方向可変車両の制動装置。
【請求項5】
請求項4に記載された運転席方向可変車両の制動装置において、
車両の前後加速度を検出する前後加速度検出手段と、
該手段で検出した前後加速度から前記後輪の目標制動力を求める目標後輪制動力演算手段とを設け、
前記回生制動制御は、前記後輪の摩擦制動力が前記後輪の目標制動力よりも上回るとき、回生制動用モータから前記後輪へ、回生制動力に代えてモータ駆動力を向かわせるものであることを特徴とする運転席方向可変車両の制動装置。
【請求項6】
請求項5に記載された運転席方向可変車両の制動装置において、
前記後輪の目標制動力は、前後輪が同時にロックする前後輪理想制動力配分特性上の目標後輪制動力とし、
前記前輪の制動力を、前記前後輪理想制動力配分特性上の目標前輪制動力となるよう制御するものであることを特徴とする運転席方向可変車両の制動装置。
【請求項7】
請求項6に記載された運転席方向可変車両の制動装置において、
前記回生制動用モータから後輪へのモータ駆動力は、前記後輪の摩擦制動力および目標後輪制動力間の制動力差であることを特徴とする運転席方向可変車両の制動装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−178286(P2011−178286A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−44875(P2010−44875)
【出願日】平成22年3月2日(2010.3.2)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月2日(2010.3.2)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]