
運転席方向可変車両
【課題】運転席方向可変車両の運転方向が何れ方向の場合も、前後輪軸重配分が前輪寄りとなって、車両がアンダーステア傾向により操縦安定性を向上されるようにする。
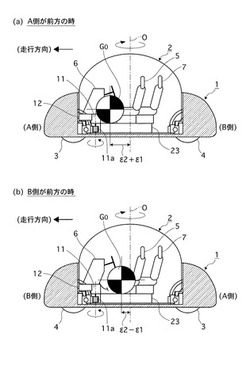
【解決手段】運転席5が(a)に示すごとく車輪側車体1のA側に向くときも(A側が前方となる走行時も)、逆に運転席5が(b)に示すごとく車輪側車体1のB側に向くときも(B側が前方となる走行時も)、車両重心G0がキャビン側車体2の回転軸線Oより走行方向前方へオフセットし、走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにする。これにより前後輪軸重配分が前輪寄りとなって、車両がアンダーステア傾向にされることで、車両の操縦安定性を向上させることができる。
【解決手段】運転席5が(a)に示すごとく車輪側車体1のA側に向くときも(A側が前方となる走行時も)、逆に運転席5が(b)に示すごとく車輪側車体1のB側に向くときも(B側が前方となる走行時も)、車両重心G0がキャビン側車体2の回転軸線Oより走行方向前方へオフセットし、走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにする。これにより前後輪軸重配分が前輪寄りとなって、車両がアンダーステア傾向にされることで、車両の操縦安定性を向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪を懸架されて当該車輪の回転により走行可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両に関するもので、特に当該車両の操縦安定性を向上させる前後軸重配分制御技術に係わる。
【背景技術】
【0002】
上記のような運転席方向可変車両の操縦安定性を向上させる技術について、本願発明者等は未だその存在を認識していないが、
運転席の向きを固定された一般車両にあっては、前後輪のタイヤ特性および前後輪サスペンション装置の設定を調整する等により、車両全体としてアンダーステア傾向となるようにし、これにより様々な運転シーンに対応できるだけの操縦安定性を確保できるようになすのが普通である。
【0003】
しかし上記の設定は、運転席の向きを固定された一般車両が、運転席の向いている方向へ、つまり車両を前方へ前進走行させる場合を念頭に行われているものであって、
一般車両が、運転席の向きと反対の方向、つまり後方へ後退走行するときは、走行方向が逆であることから上記の設定が、走行方向に関して逆転することとなり、車両は当該後退走行時にオーバーステア傾向となる。
このオーバーステア傾向は車両の操縦安定性を悪化させて挙動不安定を惹起し、この問題は高車速であるほど顕著になって、車両の操縦安定性を成立させなくする。
【0004】
ここで、本発明が要旨構成の基礎前提とする前記したような運転席方向可変車両の使用形態を考察する。
この運転席方向可変車両において、キャビン側車体を車輪側車体上で転向させることにより、運転席の向きを車輪側車体の走行方向一方側と走行方向他方側との間で切り替え得るようにした理由は、
車両を運転席方向の当該切り替えにより、車輪側車体の走行方向一方側が前となる方向への走行と、逆に車輪側車体の走行方向他方側が前となる方向への走行とを同頻度で行わせることを想定したためである。
【0005】
かように一方向走行および他方向走行とが同頻度で行われる運転席方向可変車両にあっては、構成上特別な工夫が必要でない限り、運転席の向きを切り替えて走行方向を切り替えた場合もステア特性が逆転したり、大きく変化することのないよう、前後輪のタイヤ特性および前後輪サスペンション装置の設定を決めるのが常識的であり、また前後輪軸重配分も、運転席の向き(走行方向)に関わりなく略50:50となるように定めるのが常識的である。
【0006】
そのため運転席方向可変車両は、運転席の向きを固定された一般車両のように、前後輪のタイヤ特性および前後輪サスペンション装置の設定を大きく異ならせることができないのが普通である。
そのため運転席方向可変車両のステア特性はニュートラルステア傾向となるのが一般的であり、一般車両で行っていたホイールアライメント調整などにより車両をアンダーステア傾向にすることによって十分な操縦安定性を確保しようとしても、その手法を採用することができない。
【0007】
前記したごとく、車両の走行方向が逆になった場合(後退走行時)にステア特性が逆転してオーバーステア化する(若しくはニュートラルステア化する)のを緩和して操縦安定性を向上させる技術としては従来、例えば特許文献1に記載のように、車輪のホイールアライメント制御によって目的を達成しようとする技術が提案されている。
【0008】
この特許文献1所載の提案技術は、運転席方向可変車両に対するものではなく、運転席の向きを固定された一般車両に対するものであるが、
走行方向が後退に切り替わった場合は、走行方向の切り替えによって前輪から後輪となった車輪(前進走行中に前輪だった車輪)をトーアウト方向へトー角変化させ、これにより、車両の後退時操縦安定性を悪化させる上記のオーバーステア化(若しくはニュートラルステア化)を緩和して、車両のステア特性をアンダーステア傾向に変化させるというものである。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−120037号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、上記した従来の技術思想を運転席方向可変車両に適用した場合、以下のごとき新たな問題を生ずる。
つまり、走行方向の切り替えによって前輪から後輪となった車輪をトーアウト方向へトー角変化させるに際し、当該車輪のトーアウト角を極端に大きく設定すると、アンダーステア化の効果はそれなりに得られるが、左右輪間横力差に起因して、不整路で車両の安定性が低下するほか、走行抵抗の大幅増加によって燃費が悪化したり、車輪タイヤの摩耗が激しくなるなどの新たな弊害を生ずる。
【0011】
この弊害は、運転席方向可変車両のように運転席の方向切り替えにより、車輪側車体の走行方向一方側が前となる方向への走行と、逆に車輪側車体の走行方向他方側が前となる方向への走行とを同頻度で行わせる車両の場合、許容できない重大な弊害であり、
かように看過できないほど重大な弊害による犠牲を払ってまで上記アンダーステア化を追求する必然性が運転席方向可変車両の場合は存在しない。
【0012】
かといって上記の弊害を考慮し、走行方向の切り替えにより前輪から後輪となった車輪に付与するトーアウト角を小さくしたのでは、このトーアウト角をせいぜい0.5度程度しか設定することができず、
かかる僅かなトーアウト角では、希望するオーバーステア化(若しくはニュートラルステア化)の緩和を行い得ず、結果として車両をアンダーステア傾向に変化させることができないため、操縦安定性を確保することができない。
【0013】
本発明は、上記したようなトーアウト角の設定によるホイールアライメント制御では、上記のような新たな弊害も発生して、抜本的な問題解決を実現することができないとの観点から、
また走行方向前側車輪および走行方向後側車輪間の前後軸重配分制御によっても車両のステア特性を操作することができ、しかもこれによれば、上記新たな問題を伴うことなく、ニュートラルステア傾向の運転席方向可変車両を、運転席の向き(走行方向)にかかわらずアンダーステア傾向となし得て、何れ方向への走行時も操縦安定性を確保することができるとの事実認識に基づき、この着想を具体化した運転席方向可変車両を提案することを目的とする。
【課題を解決するための手段】
【0014】
この目的のため、本発明による運転席方向可変車両は、以下のごとくにこれを構成する。
先ず、本発明の要旨構成の基礎前提となる運転席方向可変車両を説明するに、これは、
車輪を懸架されて該車輪の回転により走行可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも前記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう前記車輪側車体上に載置したキャビン側車体とより成るものである。
【0015】
本発明は、かかる運転席方向可変車両が更に、以下のような前後軸重可変構造、つまり、
前記キャビン側車体の転向に伴い、前記運転席が前記車輪側車体の走行方向一方側に向くときは該走行方向一方側における車輪の走行方向一方側軸重が前記走行方向他方側における車輪の走行方向他方側軸重よりも大きくなり、前記運転席が前記車輪側車体の走行方向他方側に向くときは前記走行方向他方側軸重が前記走行方向一方側軸重よりも大きくなるようにする前後軸重可変構造を有した構成に特徴づけられるものである。
【発明の効果】
【0016】
上記した本発明による運転席方向可変車両にあっては、
運転席が車輪側車体の走行方向一方側に向くときは該走行方向一方側における車輪の走行方向一方側軸重が走行方向他方側における車輪の走行方向他方側軸重よりも大きくなり、運転席が車輪側車体の走行方向他方側に向くときは走行方向他方側軸重が走行方向一方側軸重よりも大きくなるため、
運転席の向きによって決まる走行方向の前側における車輪の前側軸重が、反対側における車輪の後側軸重よりも必ず大きくなることとなる。
【0017】
かかる前後軸重の大小関係は、運転席方向可変車両を運転席の向き(走行方向)にかかわらずアンダーステア傾向となし得て、何れ方向への走行時も所定の操縦安定性を確保することができる。
【0018】
しかも、かかる前後軸重可変構造による上記アンダーステア傾向(操縦安定性)の確保によれば、従来のホイールアライメント制御(後輪に対するトーアウト角設定)に頼ることなく上記の作用効果を達成し得るため、
ホイールアライメント制御に頼った場合の前記新たな問題、つまり、左右輪間横力差に起因して、不整路で車両の安定性が低下したり、走行抵抗の大幅増加によって燃費が悪化したり、車輪タイヤの摩耗が激しくなるなどの新たな問題を生ずることなく、上記の作用効果を達成することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施例になる運転席方向可変車両を示す概略平面図である。
【図2】図1における運転席方向可変車両の概略側面図である。
【図3】図1,2における運転席方向可変車両の運転席方向制御プログラムを示すフローチャートである。
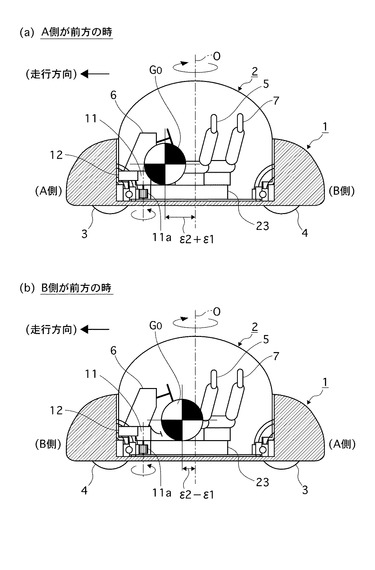
【図4】図1,2における運転席方向可変車両の運転席が向いている方向と、車両全体としての重心位置との関係を示す説明図で、 (a)は、運転席が車輪側車体のA側方向に向いている場合における車両重心位置を示す説明図、 (b)は、運転席が車輪側車体のB側方向に向いている場合における車両重心位置を示す説明図である。
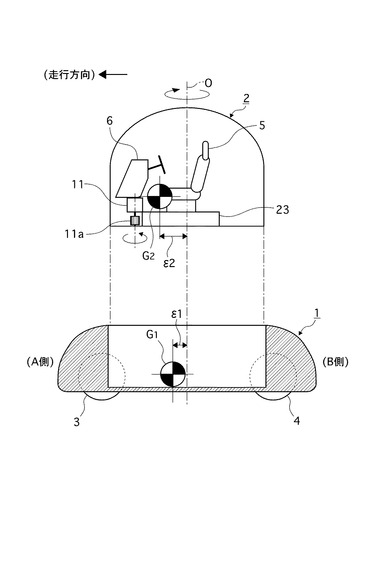
【図5】図1,2における運転席方向可変車両を構成する車輪側車体およびキャビン側車体のそれぞれの重心位置を個別に示す分解説明図である。
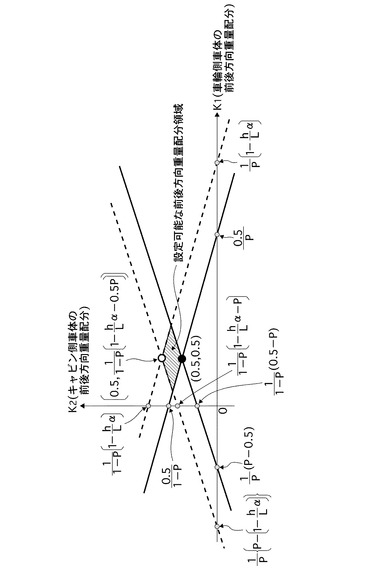
【図6】図1,2の運転席方向可変車両において、車輪側車体の前後方向重量配分を表すK1、および、キャビン側車体の前後方向重量配分を表すK2の組み合わせのうち、採用可能な組み合わせを、K1およびK2の二次元座標上に表示する領域線図である。
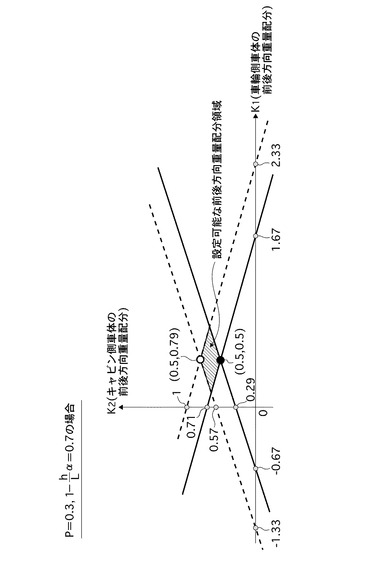
【図7】図6における採用可能なK1およびK2の組み合わせを、運転席方向可変車両の諸元が特定の値である場合につき示す、図6と同様な領域線図である。
【図8】図1,2における運転席方向可変車両の前後軸重配分と、ヨー共振周波数との関係を、従来技術適用時におけるヨー共振周波数の上昇代と比較して示す特性線図である。
【図9】本発明の第2実施例になる運転席方向可変車両の運転席が向いている方向と、車両全体としての重心位置との関係を示す説明図で、 (a)は、運転席が車輪側車体のA側方向に向いている場合における車両重心位置を示す説明図、 (b)は、運転席が車輪側車体のB側方向に向いている場合における車両重心位置を示す説明図である。
【図10】図9に示す第2実施例の運転席方向可変車両を構成する車輪側車体およびキャビン側車体のそれぞれの重心位置を個別に示す分解説明図である。
【図11】図9,10に示す運転席方向可変車両の前後軸重配分と、ヨー共振周波数との関係を、従来技術適用時におけるヨー共振周波数の上昇代と比較して示す特性線図である。
【図12】本発明の第3実施例になる運転席方向可変車両を示す、図2と同様な概略側面図である。
【図13】図12に示す第3実施例になる運転席方向可変車両の運転席方向制御およびバッテリストローク制御プログラムを示すフローチャートである。
【図14】図12の運転席方向可変車両を分解してキャビン側車体の重心位置と、このキャビン側車体および車輪側車体よりなる運転席方向可変車両の重心位置とを示す分解説明図で、 (a)は、運転席が車輪側車体のA側方向に向いている場合における車両重心位置を示す説明図、 (b)は、運転席が車輪側車体のB側方向に向いている場合における車両重心位置を示す説明図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
<第1実施例>
図1,2はそれぞれ、本発明の第1実施例になる運転席方向可変車両を示し、図1は、その概略平面図、図2は、その概略側面図である。
【0021】
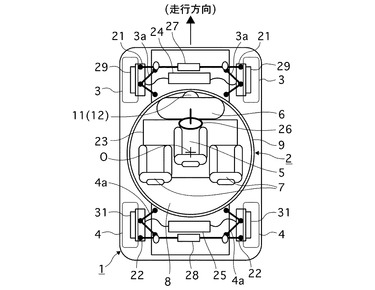
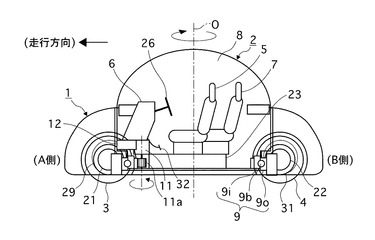
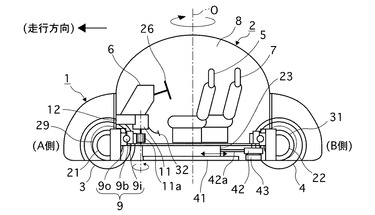
図1,2に示す第1実施例の運転席方向可変車両は、車輪側車体1およびキャビン側車体2により概ね構成する。
車輪側車体1は、該車輪側車体1の走行方向一方側に左右輪3をサスペンション装置3aにより懸架して具えると共に、該車輪側車体1の走行方向他方側に左右輪4をサスペンション装置4aにより懸架して具え、これら車輪3,4の駆動および制動により車輪側車体1は走行および停止が可能なものとする。
【0022】
キャビン側車体2は、運転席5、運転席前方のコクピットモジュール6、および運転席斜め後方における2個の乗員席7を収容したキャビン8を有するドーム形状とし、キャビン側車体2の中心鉛直線Oの周りに回転して転向し得るよう車輪側車体1上に載置する。
この載置に当たっては、車体1側に固設したアウターレース9oおよび車体2側に固設したインナーレース9i間にボール9bを介在させてなるボールベアリング型式の軸受9を用いる。
【0023】
キャビン側車体2の中心鉛直線(回転軸線)Oの周りにおける転向は、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してこれを行うこととする。
【0024】
転向アクチュエータ11は、キャビン側車体2の回転位置を検出するキャビン側車体回転位置センサ(図示せず)を内蔵し、
これからの信号および運転席方向指令スイッチ(図示せず)からの信号を基に、コクピットモジュール6に設けたコントローラ12が転向アクチュエータ11を駆動制御して、キャビン側車体2の回転軸線Oの周りにおける転向位置を、運転席が運転席方向指令スイッチからの指令通り車輪側車体1の走行方向一方側(図示のごとく車輪3の側)または走行方向他方側(図示とは反対における車輪4の側)に向く位置となし得るようにする。
【0025】
なおキャビン側車体2の回転量は、上記のように運転席の向きを相互反転できる量であれば任意であり、
キャビン側車体2が180度だけ往復回転するものであっても、キャビン側車体2が360度に亘って回転するものであってもよい。
【0026】
車輪側車体1の走行および停止を司る車輪3,4の車輪駆動部および車輪制動部を以下に説明する。
【0027】
先ず車輪駆動部を説明するに、各車輪3,4に駆動結合して車輪駆動モータ21,22を設け、これらモータ21,22を車輪側車体1上に搭載する。
車輪駆動モータ21,22はそれぞれ、キャビン側車体2の床下に収納したバッテリ23からの電力を、インバータおよびコントローラよりなる駆動制御ユニット24,25による制御下で供給されることにより駆動制御され、かかる車輪駆動モータ21,22の駆動制御により運転席方向可変車両(車輪側車体1およびキャビン側車体2)を走行可能にする。
なおバッテリ23からの電力は、キャビン側車体2の回転(転向)を司る転向アクチュエータ11の駆動など、他の電気的アクチュエータの駆動にも供される。
【0028】
上記した運転席方向可変車両(車輪側車体1およびキャビン側車体2)の走行中における操舵は、
コクピットモジュール6に設けたステアリングホイール26からの操舵指令に応動して、同じくコクピットモジュール6に設けた前記コントローラ12がステアバイワイヤ式の操舵アクチュエータ27,28を介し、対応する車輪3,4を転舵することにより当該操舵を行うものとする。
【0029】
次に車輪制動部を説明するに、各車輪3,4に関連して車輪側車体1にドラムブレーキやディスクブレーキ等の摩擦制動ユニット29,31を設ける。
これら摩擦制動ユニット29,31による車輪3,4の摩擦制動は、コクピットモジュール6に設けたブレーキペダル32からの制動指令に応動して、同じくコクピットモジュール6に設けたコントローラ12が、ブレーキバイワイヤ式に摩擦制動ユニット29,31を液圧作動させることにより、対応する車輪3,4の当該摩擦制動を行うものとする。
【0030】
かかるブレーキバイワイヤ式摩擦制動制御は、転向アクチュエータ11によるキャビン側車体2の回転位置制御(運転席方向制御)と共に、前記したコントローラ12によりこれらを実行するものとする。
そのためコントローラ12には、ブレーキペダル32の踏み込み量に関する信号と、左右輪3の回転速度および左右輪4の回転速度に関する信号と、前記した運転席方向指令スイッチ(図示せず)からの信号と、前記した転向アクチュエータ11内におけるキャビン側車体回転位置センサ(図示せず)により検出されたキャビン側車体2の回転位置に関する信号とをそれぞれ入力する。
【0031】
コントローラ12は、これら入力情報および内部情報を基に、以下のごとくに運転席方向制御を行うと共に、本発明と関係ないため本明細書での説明を省略したブレーキバイワイヤ式摩擦制動制御を行う。
【0032】
<運転席方向制御>
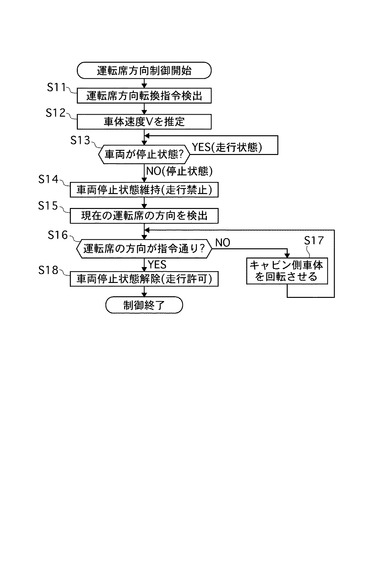
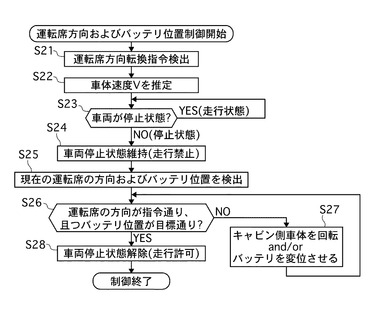
コントローラ12は、図3の制御プログラムを実行して運転席の方向制御(キャビン側車体2の回転位置制御)を遂行する。
ステップS11においては、前記した運転席方向指令スイッチからの信号を基に、運転者が運転席5の方向転換(走行方向転換)を指令したのを検出する。
運転席5の方向転換が指令されるまでは、ステップS11が実行されないから、ここで待機する。
【0033】
運転席5の方向転換が指令され、ステップS11が実行されたら、ステップS12において、車輪3,4の回転速度を基に車体速度Vを推定する。
次のステップS13においては、上記推定した車体速度Vから運転席方向可変車両が停車状態か否かをチェックし、走行状態であればここで待機し、運転席5の方向転換指令によっても、運転席5の方向を現在の向きに保つ。
【0034】
ステップS13で運転席方向可変車両が停車状態であると判定した場合、ステップS14で車両を走行禁止により停車状態に保って、運転席の方向変更制御を以下の通りに行う。
ステップS15においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出する。
次のステップS16においては、検出した現在における運転席5の向きが、ステップS11で検出した運転席指令方向に一致するか否かをチェックする。
【0035】
ステップS16で現在における運転席5の向きが運転席指令方向に一致しないと判定する場合は、ステップS17においてキャビン側車体2を中心鉛直線Oの周りに回転させるべく転向アクチュエータ11を駆動する。
【0036】
転向アクチュエータ11の駆動によりキャビン側車体2が中心鉛直線Oの周りに回転されて、運転席5の向きが運転者の望む運転席指令方向に一致するとき、ステップS16がステップS17をスキップして制御をステップS18へ進めるため、
転向アクチュエータ11の駆動が停止され、キャビン側車体2の回転位置を、運転席5の向きが運転者の望む運転席指令方向に一致した回転位置に保つことができる。
【0037】
ステップS18においては、ステップS14で実行した車両の走行禁止を解除して、車両の走行を許可し、上記の通り運転席5の向きが運転者の望む運転席指令方向に一致した状態での走行を可能にする。
【0038】
<前後軸重可変構造>
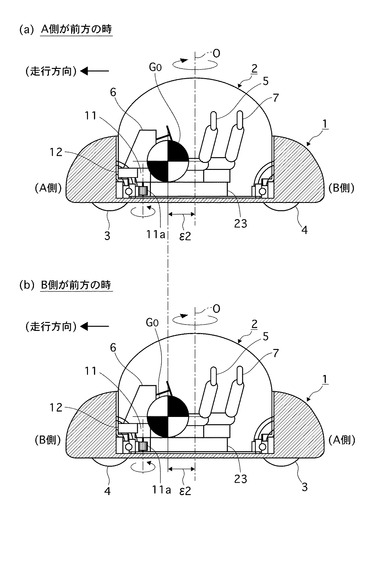
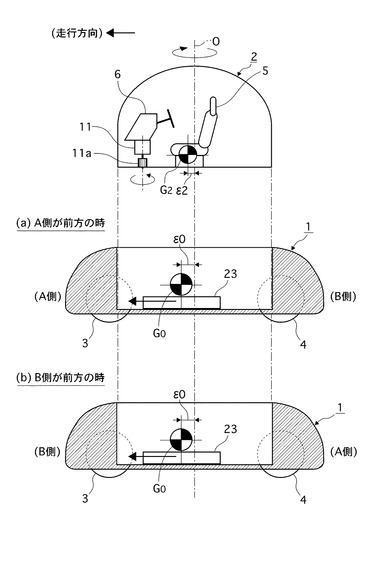
本実施例においては、キャビン側車体2の上記回転位置制御により、運転席5が図4(a)に示すごとく車輪側車体1の走行方向一方側である図2のA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図4(b)に示すごとく車輪側車体1の走行方向他方側である図2のB側に向くときも(B側が前方となる走行時も)、走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにするが、そのための前後軸重可変構造を以下に説明するようなものとする。
【0039】
この前後軸重可変構造は、運転席5を図4(a)に示すごとく車輪側車体1のA側に向けてこのA側が前方となる方向へ走行する時、運転席方向可変車両の重心G0が図4(a)に示すように、車輪3および4間の中間位置(図示例ではキャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるA側の方向へオフセットされて、当該A側における車輪3(前輪)の軸重が、走行方向後方のB側における車輪4の軸重よりも大きくなるようにし、
逆に運転席5を図4(b)に示すごとく車輪側車体1のB側に向けてこのB側が前方となる方向へ走行する時、運転席方向可変車両の重心G0が図4(b)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるB側の方向へオフセットされて、当該B側における車輪4(前輪)の軸重が、走行方向後方のA側における車輪3の軸重よりも大きくなるようにするものである。
【0040】
運転席5の方向切り替え時における上記のような車両重心G0の前後車輪間中間位置(キャビン側車体回転軸線O)からのオフセット(前後車輪間軸重配分の切り替え)が可能となるようにするために、前後軸重可変構造を以下のような構成とする。
【0041】
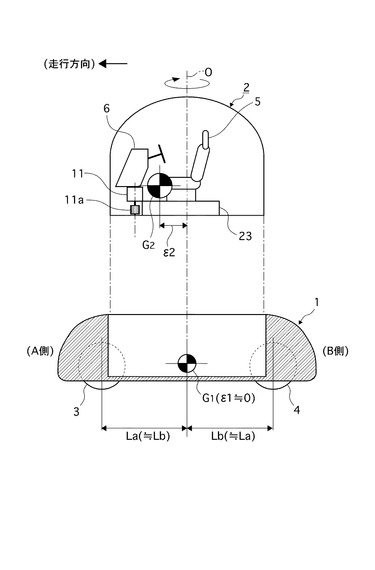
つまり図5に示すように、キャビン側車体2の前記転向を生起させるための転向アクチュエータ11およびその出力軸上のギヤ11aより成る転向駆動部を前記した通りコクピットモジュール6に設けてキャビン側車体2に設置すると共に、車両の蓄電手段であるバッテリ23をキャビン側車体2の床下に収納し、
これら転向駆動部11,11aおよびバッテリ23を、キャビン側車体2の重心G2が図5に示すごとくキャビン側車体2の回転軸線Oよりも、運転席5の向いている方向へε2だけオフセットされるような位置に配置する。
【0042】
そして、キャビン側車体2の回転軸線Oに対してキャビン側車体2の重心G2を運転席5の向いている方向へオフセットさせる量ε2は、
同じく図5に例示する車輪側車体1のG1で示す重心位置、詳しくは車輪3,4間の中間位置にあるキャビン側車体2の回転軸線Oに対する車輪側車体重心G1の、車輪3または4側へのオフセット量(図5では車輪3側へのオフセット量ε1)との関連において、ε2>ε1となるよう決定する。
【0043】
かようにすることで、キャビン側車体2の重心G2および車輪側車体1の重心G1がそれぞれ図5に示すごときものである場合につき説明すると、
運転席5を図4(a)に示すごとく車輪側車体1のA側に向けてこのA側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図4(a)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるA側の方向へ(ε2+ε1)だけオフセットされて、当該A側における車輪3(前輪)の軸重が、走行方向後方のB側における車輪4の軸重よりもオフセット分だけ大きくなることになる。
また、逆に運転席5を図4(b)に示すごとく車輪側車体1のB側に向けてこのB側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図4(b)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるB側の方向へ(ε2−ε1)だけオフセットされて、当該B側における車輪4(前輪)の軸重が、走行方向後方のA側における車輪3の軸重よりもオフセット分だけ大きくなることになる。
【0044】
なお本実施例では、転向駆動部11,11aおよびバッテリ23の双方をキャビン側車体2上に設置し、これら転向駆動部11,11aおよびバッテリ23の前記配置により、キャビン側車体2の回転軸線Oに対してキャビン側車体2の重心G2を運転席5の向いている方向へε2だけオフセットさせるようにしたが、
要求オフセット量ε2が少ない場合は、転向駆動部11,11aおよびバッテリ23のいずれか一方のみをキャビン側車体2上に設置して、上記の要求が満足されるような位置に配置しても良いのは言うまでもないし、
また、転向駆動部11,11aおよびバッテリ23に代わる別の重量物をキャビン側車体2上に設置して、上記の要求が満足されるような位置に配置しても良いのは言うまでもない。
【0045】
<前後軸重配分の設定>
ここで、上記のようにして運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3の軸重よりも大きくなるようにする時における前後車輪間軸重配分要領について考察する。
【0046】
運転席方向可変車両全体としての前後軸重配分の制約条件は、車両全体の前後軸重配分比を
k:(1−k)
但し、k:(0<k<1)
とおくと、
図4(a),(b)につき上述したように運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなるようにすることを趣旨とするため、
k>0.5 ・・・(1)
であることが必須である。
【0047】
一方で、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存しているのが、車両の挙動安定性を確保するために肝要である。
本実施例においては前記した通り運転席方向可変車両の軸重配分が前軸寄りであることから、また車両には一般的に加速時よりも減速時の方が大きな前後加速度が加わることから、
上記の発生可能な最大前後加速度は、発生可能な最大減速度であると見なし、この最大減速度が運転席方向可変車両に付加された場合でも、走行方向後側となる車輪の軸重が残っているように、車両の前後軸重配分を設定することとする。
【0048】
ここで運転席方向可変車両の発生可能な最大減速度をα(符号は減速方向を正とし、値は、制動減速度と、路面勾配に応じた重力加速度成分との合成加速度であり、最大でも1.4G程度までを考慮しておけばよい)とし、車両の前後車輪間におけるホイールベースをLとし、車両の重心高さをhとしたとき、
車両に最大減速度αが付加された場合でも、走行方向後側となる車輪の軸重が残っているようにするためには、上記のkが、
k<{1−(h/L)×α} ・・・(2)
の条件を満足するものである必要がある。
【0049】
よって、運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなるようにすると共に、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存しているようにするためには、
運転席方向可変車両全体としての前後軸重配分を決定するに際して用いる前記のkは、前記(1)式および(2)式から、
0.5<k<{1−(h/L)×α} ・・・(3)
の条件を満足するものである必要がある。
そこで本実施例においては、運転席5の向き(運転席方向可変車両の走行方向)が何れの場合であっても、運転席方向可変車両の前後軸重配分を、上記(3)式を満足するkによって決まるようなものとなるように設定することとする。
【0050】
次に、運転席方向可変車両の前後軸重配分が上記のようになるための、車輪側車体1およびキャビン側車体2の前後方向重量配分設定について説明する。
車輪側車体1の前後方向重量配分が50:50に近いほど、また車輪側車体1の質量が小さいほど、考え方が単純となって好ましく、この場合は、キャビン側車体2を前記(3)式が満足されるような前後方向重量配分に設定するだけでよい。
【0051】
以下、具体的に説明する。
車輪側車体1と、キャビン側車体2との質量比をP:(1−P)とし(但し、0<P<1)、
車輪側車体1の前後方向重量配分比(図5のA側を前方とする)をK1:(1−K1)とし(但し、0<K1<1)、
キャビン側車体2の前後方向重量配分比をK2:(1−K2)とした場合(但し、0<K2<1)、
前記の(3)式の条件を満たすためには、運転席5の向きに応じて、以下の(4)式および(5)式を満足する必要がある。
【0052】
つまり、図3(a)に示すように、運転席5の向きを車輪側車体1のA側が前方となるようなものとして走行する場合は、
0.5<P・K1+(1−P)K2<{1−(h/L)×α} ・・・(4)
を満足する必要があり、また、
図3(b)に示すように、運転席5の向きを車輪側車体1のB側が前方となるようなものとして走行する場合は、
0.5−P <−P・K1+(1−P) K2<{1−(h/L)×α}−P ・・・(5)
を満足する必要がある。
【0053】
これら(4)式および(5)式は、車輪側車体1の前後方向重量配分を表すK1、および、キャビン側車体2の前後方向重量配分を表すK2の二次元座標上に表示すると、図6に示すごときものとなる。
これから明らかなように、運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなり、且つ、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存するようになすためには、
車輪側車体1の前後方向重量配分を表すK1、および、キャビン側車体2の前後方向重量配分を表すK2が、図6にハッチング付して示す領域内の組み合わせである必要がある。
【0054】
例えば、車輪側車体1とキャビン側車体2との質量比を表すPが0.3であり、また前記(4)式および(5)式中における{1−(h/L)×α}が0.7である場合につき、これら(4)式および(5)式をK1およびK2の二次元座標上に表すと図7に示すごときものとなり、
この図7にハッチング付して示す領域内におけるK1およびK2の組み合わせとなるよう車輪側車体1の前後方向重量配分およびキャビン側車体2の前後方向重量配分を決定すれば、
運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなり、且つ、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存するようになる。
【0055】
そして、車輪側車体1の前後方向重量配分が50:50であれば、K2が0.5よりも大きくなるようキャビン側車体2を構成するだけで、上記の要求を満足させることができる。
【0056】
以上のような前後軸重配分可変構造を有した運転席方向可変車両にあっては、運転席5の方向切り替えを行った場合に、車両の操縦安定性が以下に説明するように向上される。
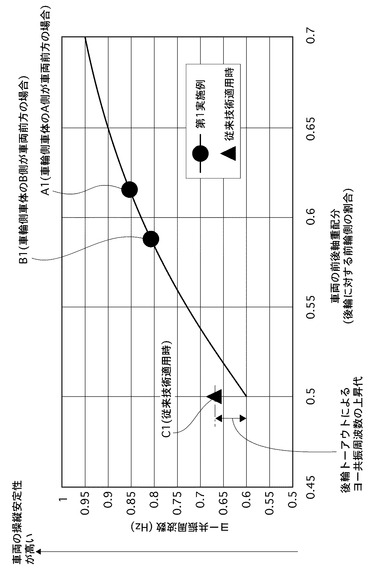
ここでは、車両の操縦安定性を評価する指標として、図8の縦軸上に目盛ったヨー共振周波数(Hz)を用いる。
このヨー共振周波数は、操舵に対する車両の応答性の高さや、外乱に対する車両の自律的な安定性の高さに直接関係する指標であり、数値が高いほど車両の操縦安定性が高いことを意味する。
【0057】
図8の実線は、車輪側車体1の走行方向両側車輪3,4ともに、同じタイヤを履き、同じ特性のサスペンションで懸架されているため、前後の等価コーナリングパワー倍率が同じである運転席方向可変車両において、
車両全体の前後軸重配分(後輪軸重に対する前輪軸重の割合)を逐次変えた場合におけるヨー共振周波数の変化特性を例示するものである。
この図8から明らかなように、前側軸重が50%から70%となる前後軸重配分では、前後軸重配分が前寄りであるほどアンダーステア傾向によりヨー共振周波数が高くなって、操舵に対する車両の応答性が高くなると共に、外乱に対する車両の自律的な安定性が高くなって操縦安定性が増す。
【0058】
そして図8におけるA1点は、図4(a)に示すごとく運転席5が車輪側車体1のA側に向くとき(A側が前方となる走行時)のヨー共振周波数であり、また図8におけるB1点は、逆に運転席5が図4(b)に示すごとく車輪側車体1のB側に向くとき(B側が前方となる走行時)のヨー共振周波数である。
いずれの場合も、運転席方向可変車両の重心G0がキャビン側車体2の回転軸線Oより走行方向前方へオフセットされ、そのオフセット量(ε2+ε1、ε2−ε1)に応じ走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなって、車両をアンダーステア傾向にすることから、
ヨー共振周波数が高くなって、操舵に対する車両の応答性が高くなると共に、外乱に対する車両の自律的な安定性が高くなって操縦安定性が増す。
【0059】
図8におけるC1点は、前後軸重配分が50:50で、車輪タイヤが前後とも同じで、初期トー角以外のサスペンション設定が前後とも同じである車両に対し前記した従来技術の考え方を適用し、走行方向後方となる側の車輪にトーアウト角を付与した場合におけるヨー共振周波数の上昇を、参考までに示したものである。
【0060】
しかし、上記のトーアウト角を極端に大きく設定すると、前記した通り左右輪間横力差に起因して、不整路で車両の安定性が低下するほか、走行抵抗の大幅増加により燃費が悪化したり、車輪タイヤの摩耗が激しくなるなど、運転席方向可変車両にとって看過できない新たな問題を生ずることから、
図8におけるC1点は、この問題を考慮して上記のトーアウト角を約0.6度となし、走行方向前方車輪の等価コーナリングパワー倍率が0.9倍程度となるようにした場合におけるヨー共振周波数の上昇を示す。
このため従来の対策では、ヨー共振周波数の上昇代は、図8のC1点における程度しか得られず、極僅かである。
【0061】
<第1実施例の作用効果>
これに対し本実施例では、運転席が図4(a)に示すごとくA側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2+ε1)だけオフセットされ、運転席が図4(b)に示すごとくB側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2−ε1)だけオフセットされるようにして、運転席の向きに関わらず車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向前方に位置するようになし、これにより上記のオフセット量(ε2+ε1、ε2−ε1)に応じて走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにする前後軸重可変構造を有した構成になるから、
当該前後軸重配分により運転席方向可変車両のステア特性をアンダーステア傾向にすることができ、これにより車両のヨー共振周波数が高くなって、操舵に対する車両の応答性が高くなると共に、外乱に対する車両の自律的な安定性が高くなって操縦安定性を向上させることができる。
【0062】
そして本実施例のように、運転席の向きに関わらず走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにして、どちら向きの走行時も高い操縦安定性が得られるようにした場合、
前記した従来の技術を運転席方向可変車両に適用して走行方向に応じタイヤトー角を変更させるホイールアライメント制御に頼るよりも、図8のA1,B1とC1との比較から明らかなように、ヨー共振周波数の上昇代が遙かに大きくて、車両の操縦安定性を確実に、且つ大きく向上させることができる。
【0063】
しかも、従来技術を適用して走行方向後側の車輪にトーアウト角を設定するホイールアライメント制御により所定の操縦安定性を確保しようとすると、前記した通り左右輪間横力差に起因して、不整路で車両の安定性が低下するほか、走行抵抗の大幅増加により燃費が悪化したり、車輪タイヤの摩耗が激しくなるなど、運転席方向可変車両にとって看過できない新たな問題を生ずるが、
本実施例のごとく、ホイールアライメント制御に頼らない前後軸重可変構造によって所定の操縦安定性を確保する場合、運転席方向可変車両にとって看過できない上記新たな問題を生ずることなく、前記の作用効果を達成することができる。
【0064】
更に本実施例においては、上記の作用効果を達成する前後軸重可変構造の設計に当たり前記した通り、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存するようにしたため、
どんな条件でも車輪に設置荷重が存在していることとなって、運転席方向可変車両の加減速時における挙動の安定性を確保することができる。
【0065】
また本実施例においては、運転席方向可変車両を以下のようなもの、つまり、キャビン側車体1が車輪側車体1に対し、車体上下方向へ延在する回転軸線Oの周りに相対回転して運転席5の向きを変えるようなものとし、
キャビン側車体2の重心位置G2をキャビン側車体回転軸線Oよりも、運転席5の向いている方向へオフセット(ε2)させて、前記の作用効果を達成する前後軸重可変構造が得られるようにしたため、
前後軸重配分制御機構のような追加の設備を何ら要することなく、運転席方向可変車両に不可欠な構成要件の配置を工夫して上記の前後軸重可変構造が得られるようにするだけで安価に、基本的な操縦安定性の確保が可能である。
【0066】
なお、運転席方向可変車両に不可欠な構成要件の配置を、上記基本的な操縦安定性の確保が可能となるよう工夫するに際し、本実施例のように、キャビン側車体2の転向駆動部11,11aをキャビン側車体2に設置し、この転向駆動部11,11aを、キャビン側車体2の重心位置G2がキャビン側車体回転軸線Oよりも、運転席5の向いている方向へオフセット(ε2)されるよう配置する場合、
余分なバラストを搭載したり、他の構成物の配置を変更したりすることなく、従って、車両重量の増大を伴うことなしに、またバラスト設置スペースの確保に苦慮することなしに、基本的な操縦安定性の確保が可能である。
【0067】
また、運転席方向可変車両に不可欠な構成要件の配置を、上記基本的な操縦安定性の確保が可能となるよう工夫するに際し、本実施例のように、車両走行用の電力を蓄電するバッテリ23をキャビン側車体2に設置し、このバッテリ23を、キャビン側車体2の重心位置G2がキャビン側車体回転軸線Oよりも、運転席5の向いている方向へオフセット(ε2)されるよう配置する場合も、
余分なバラストを搭載したり、他の構成物の配置を変更したりすることなく、基本的な操縦安定性の確保が可能であるが、
更に加えて、バッテリ23の質量が他の構成物と比較して大きいため、一層効率良く基本的な操縦安定性を確保することができる。
【0068】
<第2実施例>
上記した第1実施例では、運転席が図4(a)に示すごとくA側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2+ε1)だけオフセットされ、運転席が図4(b)に示すごとくB側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2−ε1)だけオフセットされるというように、運転席の向き(走行方向)によってキャビン側車体2の回転軸線Oに対する車両重心G0のオフセット量が異なり、操縦安定性をもたらすアンダーステア傾向の程度が走行方向によって異なる。
【0069】
しかし好ましくは、運転席5の向きに関わらずアンダーステア傾向の程度は同じである方が、何れの向きの走行時も同じ操縦安定性となって運転者に違和感を与えないないようにする意味合いにおいて良い。
第2実施例はこの要求に鑑み、運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図9(a),(b)にε2で示すように略同じになるようにする。
【0070】
この場合、運転席5の向き(走行方向)に関わらず、走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも、上記のオフセット量ε2に応じた分だけ大きくなり、運転席5の向き(走行方向)の切り替え時も前後軸重配分、およびこれにより得られる操縦安定性の向上代が不変に保たれる。
かように、運転席5の向き(走行方向)の切り替え時も前後軸重配分が不変に保たれるよう、運転席5の向き(走行方向)が何れ方向であっても、キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を略同じにするための前後軸重可変構造を以下に説明する。
【0071】
なお本実施例でも、運転席方向可変車両を基本的には図1,2につき前述したと同じ構成となし、キャビン側車体2の転向(運転席5の方向)制御を図3につき前述したと同様に行うが、
本実施例においては、前後軸重可変構造を以下の点において第1実施例と異ならせることとする。
【0072】
つまり本実施例において前後軸重可変構造は、図10に示すように、先ず車輪側車体1自身を、走行方向一方側車輪3の軸重および走行方向他方側車輪4の軸重がほぼ同じになるよう構成して、その重心G1が車両走行方向において、車輪3,4間の中間位置{ホイールベースをLとした時、車輪3の接地点からLa=(1/2)Lの位置、および車輪4の接地点からLb=(1/2)Lの位置}に存在するようになす。
【0073】
そしてキャビン側車体2の回転軸線Oを、車輪側車体1の走行方向一方側車輪3および走行方向他方側車輪4間の中間位置に存在する車輪側車体1の重心G1とほぼ同じ位置に配置し、
キャビン側車体2の回転軸線Oに対する車輪側車体1の重心G1のオフセット量ε1を略0にする。
【0074】
また、キャビン側車体2の転向駆動部である転向アクチュエータ11およびその出力軸上のギヤ11aを第1実施例と同じくコクピットモジュール6に設けてキャビン側車体2に設置すると共に、車両の蓄電手段であるバッテリ23をキャビン側車体2の床下に収納し、
これら転向駆動部11,11aおよびバッテリ23を、キャビン側車体2の重心G2が図10に示すごとくキャビン側車体2の回転軸線Oよりも、運転席5の向いている方向へε2だけオフセットされるような位置に配置する。
【0075】
かようにすることで、キャビン側車体2の重心G2および車輪側車体1の重心G1がそれぞれ図10に示すごときものである場合につき説明すると、
運転席5を図9(a)に示すごとく車輪側車体1のA側に向けてこのA側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図9(a)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるA側の方向へ(ε2)だけオフセットされて、当該A側における車輪3(前輪)の軸重が、走行方向後方のB側における車輪4(後輪)の軸重よりも上記オフセット分だけ大きくされることになる。
【0076】
また、逆に運転席5を図9(b)に示すごとく車輪側車体1のB側に向けてこのB側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図9(b)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるB側の方向へ(ε2)だけオフセットされて、当該B側における車輪4(前輪)の軸重が、走行方向後方のA側における車輪3(後輪)の軸重よりも上記オフセット分だけ大きくなることになる。
【0077】
上記のように、運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量が、図9(a),(b)にε2で示すように略同じになるようにしたことから、
運転席5の向き(走行方向)に関わらず、走行方向前方車輪の軸重と、走行方向後方車輪の軸重とが略同じ比に保たれたまま、前方車輪の軸重が後方車輪の軸重よりも大きくなることとなる。
【0078】
なお、図10に示すキャビン側車体2の重心位置G2に関わるキャビン側車体2の前記した前後方向重量配分比K2:(1−K2)を表すK2(但し、0<K2<1)は、
車輪側車体1の重心G1がキャビン側車体回転軸線Oと同じ位置にあってK1=0.5であることから、
このK1=0.5を前記(4)式および(5)式を代入して得られる次式を満足するように決定すればよい。
0.5< K2<{1/(1−P)}{1−(h/L)−0.5P} ・・・(6)
【0079】
<第2実施例の作用効果>
上記した第2実施例の構成によれば、第1実施例の前記した作用効果を全て奏し得るほか、以下の作用効果をも得ることができる。
つまり、運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図9(a),(b)にε2で示すように略同じになるようにしたため、
運転席5の向き(走行方向)に関わらず、走行方向前方車輪の軸重を走行方向後方車輪の軸重よりも大きくする時の前後軸重配分が略同じになり、この前後軸重配分で得られるアンダーステア傾向の程度も略同じとなり、何れの向きの走行時も狙い通りの同じ操縦安定性となって運転者に違和感を与えることがない。
【0080】
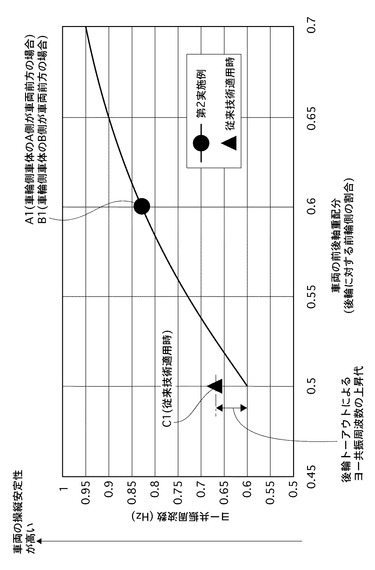
図8と同様な図11を用いて、本実施例の作用効果を更に付言する。
本実施例では、運転席5の向き(走行方向)に関わらず、キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図9(a),(b)にε2で示すように略同じになるようにし、走行方向前方車輪の軸重を走行方向後方車輪の軸重よりも大きくする時の前後軸重配分が略同じになるようにしたため、
運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くとき(A側が前方となる走行時)のヨー共振周波数(A1点のヨー共振周波数)も、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くとき(B側が前方となる走行時)のヨー共振周波数(B1点のヨー共振周波数)も、図11の横軸上に目盛った前後軸重配分が同じである時の値となり、何れの向きの走行時も狙い通りの同じ操縦安定性となって運転者に違和感を与えることがない。
【0081】
ところで、かかる作用効果を達成するための前後軸重可変構造を構築するに際し、本実施例においては、
図10に示すように、車輪側車体1自身を、走行方向一方側車輪3の軸重および走行方向他方側車輪4の軸重がほぼ同じになるよう構成して、その重心G1が車輪3,4間の中間位置に存在するようになすと共に、
キャビン側車体2の回転軸線Oを車輪側車体1の重心G1とほぼ同じ位置に配置し、
キャビン側車体2の重心G2を図10に示すごとくキャビン側車体2の回転軸線Oよりも、運転席5の向いている方向へε2だけオフセットさせたため、
キャビン側車体2の重心G2の上記オフセットε2のみにより、簡単かつ容易に第2実施例に特有な上記の作用効果を達成することができる。
【0082】
<第3実施例>
図12は、第3実施例になる運転席方向可変車両を示し、本実施例においては、運転席方向可変車両を基本的に図1,2につき前述したと同様な構成とするが、前後軸重可変構造を特に以下のようなものとする。
【0083】
つまり、バッテリ23を車輪側車体1上に、その走行方向へ変位可能にして設置する。
このバッテリ23の設置に際しては、車輪側車体1上にその走行方向へ延在させてリニヤガイド41を設け、このリニヤガイド41による案内下でバッテリ23を車輪側車体1に対し、その走行方向へ変位可能に支持する。
【0084】
バッテリ23を車輪側車体1に対し相対的に、車輪側車体1の走行方向へ変位させるための、ボールスクリュー式や油圧式を可とするリニヤアクチュエータ42を、車輪側車体1に取り付けて設け、
当該リニヤアクチュエータ42のアクチュエータロッド42aをバッテリ23に連結して蓄電手段変位機構を構成する。
かくして、リニヤアクチュエータ42の駆動によりバッテリ23を車輪側車体1に対し相対的に、車輪側車体1の走行方向へ自由に変位させることができる。
【0085】
かかる変位によりバッテリ23が車輪側車体1に対し如何なる相対位置に居るかを検出するためのバッテリストローク位置センサ43を、リニヤアクチュエータ42に沿わせて車輪側車体1に設ける。
リニヤアクチュエータ42によるバッテリ23のストローク位置は、運転席方向制御を司るコントローラ12により制御することとし、そのため上記バッテリストローク位置センサ43からの検出信号はコントローラ12に入力する。
【0086】
<運転席方向制御およびバッテリ位置制御>
コントローラ12は、バッテリストローク位置センサ43からの検出信号と、前記した各種入力情報とを基に図13の制御プログラムを実行して、図3につき前述したと同様な運転席5の方向制御を行うと同時に、リニヤアクチュエータ42の駆動によるバッテリ23のストローク位置制御を行う。
【0087】
ステップS21〜ステップS24は、図3におけるステップS11〜ステップS14と同じ処理を行うため、これらステップS21〜ステップS24の説明をここでは省略する。
ステップS11で運転者が運転席5の方向転換(走行方向転換)を指令したのを検出し、ステップS22〜ステップS24で走行禁止が実行されている間に選択されるステップS25においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出すると共に、上記バッテリストローク位置センサ43からの検出信号から現在におけるバッテリ23のストローク位置を検出する。
【0088】
次のステップS26においては、現在における運転席5の向きが、ステップS11で検出した運転席指令方向に一致しているか否かをチェックすると共に、現在におけるバッテリ23のストローク位置が、上記の運転席指令方向に応じて前記のように決まる車両重心G0の目標位置を実現するのに必要なバッテリ目標位置に一致しているか否かをチェックする。
【0089】
ステップS26で運転席5の向きが運転席指令方向に一致していないと判定する場合や、バッテリ23のストローク位置がバッテリ目標位置に一致していないと判定する場合は、
ステップS27において、キャビン側車体2を中心鉛直線Oの周りに回転させて運転席5の向きを運転席指令方向に一致させるべく転向アクチュエータ11を駆動したり、バッテリ23が目標位置に向かって変位され、バッテリ23のストローク位置がバッテリ目標位置に一致するようリニヤアクチュエータ42を駆動する。
【0090】
ここで、リニヤアクチュエータ42の駆動によるバッテリ23のストローク位置制御を以下に詳述する。
図14(a)に示すごとく、運転席5が車輪側車体1のA側に向くときは(A側が前方となる走行時は)、バッテリ23を同図(a)に矢印で示すA側方向へストロークさせて、走行方向前方車輪となる対応側車輪3の軸重を増大させると同時に、走行方向後方車輪となる反対側車輪4の軸重を低下させて、車両重心G0がキャビン側車体回転中心Oよりも走行方向前方へε0だけオフセットして位置するようになし、
図14(b)に示すごとく、運転席5が車輪側車体1のB側に向くときは(B側が前方となる走行時は)、バッテリ23を同図(b)に矢印で示すB側方向へストロークさせて、走行方向前方車輪となる対応側車輪4の軸重を増大させると同時に、走行方向後方車輪となる反対側車輪3の軸重を低下させて、車両重心G0がキャビン側車体回転中心Oよりも走行方向前方へε0だけオフセットして位置するようになす。
【0091】
かかるバッテリ23のストローク位置(車両重心G0の位置)制御に当たっては、運転席方向可変車両全体としての前後軸重配分を決定する際に用いる前記のkが、前記(3)式を満足するように当該制御を行い、
これにより、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存しているようにする。
【0092】
なお本実施例では、バッテリ23のストローク位置(車両重心G0の位置)制御により前後軸重配分を任意に制御可能であることから、キャビン側車体2の重心G2が第1実施例や第2実施例のように、キャビン側車体回転軸線Oより運転席方向へオフセットしている必要はない。
しかし、キャビン側車体2の重心G2がキャビン側車体回転軸線Oより運転席方向と逆の方向へオフセットしていると、その分だけバッテリ23を図14(a),(b)に矢印で示す方向へストロークさせる量が多くなったり、或いは一層多くの質量を移動させることが必要になって不利であることから、
キャビン側車体2の重心G2は図14に示すごとく、キャビン側車体回転軸線Oから運転席方向と同じ方向へオフセットしているのが望ましい。
【0093】
転向アクチュエータ11の駆動によりキャビン側車体2が中心鉛直線Oの周りに回転されて、運転席5の向きが運転者の望む運転席指令方向に一致し、且つ、リニヤアクチュエータ42の駆動によりバッテリ23のストローク位置がバッテリ目標位置に一致するとき、ステップS26がステップS27をスキップして制御をステップS28へ進めるため、
転向アクチュエータ11およびリニヤアクチュエータ42の駆動が停止され、キャビン側車体2の回転位置を、運転席5の向きが運転者の望む運転席指令方向に一致した回転位置に保つことができると共に、バッテリ23を、そのストローク位置がバッテリ目標位置に一致する位置に保つことができる。
【0094】
ステップS28においては、ステップS24で実行した車両の走行禁止を解除して、車両の走行を許可し、上記の通り運転席5の向きが運転者の望む運転席指令方向に一致した状態での走行を可能にすると共に、上記の通りバッテリ23の上記ストローク位置制御により車両重心G0を、運転席5の向き(走行方向)に応じて決まる図14に例示する目標位置となした状態で、車両を走行させることが可能になる。
【0095】
<第3実施例の作用効果>
上記した第3実施例の構成によれば、運転席5が図14(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図14(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図14(a),(b)にε0で示すように略同じにし得るため、図11につき前述した第2実施例の作用効果を全て奏することができる。
【0096】
一方で、かかる作用効果を達成するための前後軸重可変構造を構築するに際し、本実施例においては、
図12〜14に示すように、バッテリ23を車輪側車体1に変位可能に設置し、キャビン側車体2が運転席5を車輪側車体1のA側に向かせる転向位置であるときは、バッテリ23をリニヤアクチュエータ42により運転席5の向いている方向へ変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させ、キャビン側車体2が運転席5を車輪側車体1のB側に向かせる転向位置であるときは、バッテリ23をリニヤアクチュエータ42により運転席5の向いている方向へ変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させるようにしたため、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量、つまり運転席方向可変車両の前後軸重配分を任意に制御可能であり、制御の自由度が高くなると共に、車両の走行条件ごとに制御態様を切り替えることさえ可能になる。
【0097】
<その他の実施例>
なお上記した第1実施例〜第3実施例ではいずれも、図1,2,12に示すように、軸受9を介しキャビン側車体2をその中心鉛直線Oの周りに回転可能にして車輪側車体1上に載置し、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してキャビン側車体2の転向を行うこととしたが、
キャビン側車体2の転向機構は、これに限られるものでなく任意の構造のものにし得るし、またキャビン側車体2の転向も、キャビン側車体2が両方向へ正逆回転することで当該転向を行うものに限らず、一方向へのみ回転することで当該転向を行うものであってもよい。
【0098】
また車輪3,4の駆動方式についても、図1,2につき前述したように各車輪3,4ごとに車輪駆動モータ21,22を設け、各車輪3,4を個々の車輪駆動モータ21,22で駆動するようにした所謂インホイールモータ式のものに限られず、
車輪側車体1の走行方向一方側および他方側にそれぞれ1つずつ車輪駆動モータを設けて、対応する側における左右一対の車輪3,4を共通なモータで駆動するようにした車輪駆動方式でもよいし、
全輪3,4に共通な1個のモータを設けて、これによりディファレンシャルギヤ装置およびドライブシャフトを介し全輪3,4を駆動するようにした車輪駆動方式でもよい。
【符号の説明】
【0099】
1 車輪側車体
2 キャビン側車体
3 走行方向一方側の左右輪
4 走行方向他方側の左右輪
5 運転席
6 コクピットモジュール
7 乗員席
8 キャビン
9 キャビン側車体支承軸受
11 転向アクチュエータ
12 コントローラ
21,22 車輪駆動モータ
23 バッテリ(蓄電手段)
24,25 車輪駆動制御ユニット
26 ステアリングホイール
27,28 操舵アクチュエータ
29,31 摩擦制動ユニット
32 ブレーキペダル
41 リニヤガイド
42 リニヤアクチュエータ
43 バッテリストローク位置センサ
【技術分野】
【0001】
本発明は、車輪を懸架されて当該車輪の回転により走行可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両に関するもので、特に当該車両の操縦安定性を向上させる前後軸重配分制御技術に係わる。
【背景技術】
【0002】
上記のような運転席方向可変車両の操縦安定性を向上させる技術について、本願発明者等は未だその存在を認識していないが、
運転席の向きを固定された一般車両にあっては、前後輪のタイヤ特性および前後輪サスペンション装置の設定を調整する等により、車両全体としてアンダーステア傾向となるようにし、これにより様々な運転シーンに対応できるだけの操縦安定性を確保できるようになすのが普通である。
【0003】
しかし上記の設定は、運転席の向きを固定された一般車両が、運転席の向いている方向へ、つまり車両を前方へ前進走行させる場合を念頭に行われているものであって、
一般車両が、運転席の向きと反対の方向、つまり後方へ後退走行するときは、走行方向が逆であることから上記の設定が、走行方向に関して逆転することとなり、車両は当該後退走行時にオーバーステア傾向となる。
このオーバーステア傾向は車両の操縦安定性を悪化させて挙動不安定を惹起し、この問題は高車速であるほど顕著になって、車両の操縦安定性を成立させなくする。
【0004】
ここで、本発明が要旨構成の基礎前提とする前記したような運転席方向可変車両の使用形態を考察する。
この運転席方向可変車両において、キャビン側車体を車輪側車体上で転向させることにより、運転席の向きを車輪側車体の走行方向一方側と走行方向他方側との間で切り替え得るようにした理由は、
車両を運転席方向の当該切り替えにより、車輪側車体の走行方向一方側が前となる方向への走行と、逆に車輪側車体の走行方向他方側が前となる方向への走行とを同頻度で行わせることを想定したためである。
【0005】
かように一方向走行および他方向走行とが同頻度で行われる運転席方向可変車両にあっては、構成上特別な工夫が必要でない限り、運転席の向きを切り替えて走行方向を切り替えた場合もステア特性が逆転したり、大きく変化することのないよう、前後輪のタイヤ特性および前後輪サスペンション装置の設定を決めるのが常識的であり、また前後輪軸重配分も、運転席の向き(走行方向)に関わりなく略50:50となるように定めるのが常識的である。
【0006】
そのため運転席方向可変車両は、運転席の向きを固定された一般車両のように、前後輪のタイヤ特性および前後輪サスペンション装置の設定を大きく異ならせることができないのが普通である。
そのため運転席方向可変車両のステア特性はニュートラルステア傾向となるのが一般的であり、一般車両で行っていたホイールアライメント調整などにより車両をアンダーステア傾向にすることによって十分な操縦安定性を確保しようとしても、その手法を採用することができない。
【0007】
前記したごとく、車両の走行方向が逆になった場合(後退走行時)にステア特性が逆転してオーバーステア化する(若しくはニュートラルステア化する)のを緩和して操縦安定性を向上させる技術としては従来、例えば特許文献1に記載のように、車輪のホイールアライメント制御によって目的を達成しようとする技術が提案されている。
【0008】
この特許文献1所載の提案技術は、運転席方向可変車両に対するものではなく、運転席の向きを固定された一般車両に対するものであるが、
走行方向が後退に切り替わった場合は、走行方向の切り替えによって前輪から後輪となった車輪(前進走行中に前輪だった車輪)をトーアウト方向へトー角変化させ、これにより、車両の後退時操縦安定性を悪化させる上記のオーバーステア化(若しくはニュートラルステア化)を緩和して、車両のステア特性をアンダーステア傾向に変化させるというものである。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−120037号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、上記した従来の技術思想を運転席方向可変車両に適用した場合、以下のごとき新たな問題を生ずる。
つまり、走行方向の切り替えによって前輪から後輪となった車輪をトーアウト方向へトー角変化させるに際し、当該車輪のトーアウト角を極端に大きく設定すると、アンダーステア化の効果はそれなりに得られるが、左右輪間横力差に起因して、不整路で車両の安定性が低下するほか、走行抵抗の大幅増加によって燃費が悪化したり、車輪タイヤの摩耗が激しくなるなどの新たな弊害を生ずる。
【0011】
この弊害は、運転席方向可変車両のように運転席の方向切り替えにより、車輪側車体の走行方向一方側が前となる方向への走行と、逆に車輪側車体の走行方向他方側が前となる方向への走行とを同頻度で行わせる車両の場合、許容できない重大な弊害であり、
かように看過できないほど重大な弊害による犠牲を払ってまで上記アンダーステア化を追求する必然性が運転席方向可変車両の場合は存在しない。
【0012】
かといって上記の弊害を考慮し、走行方向の切り替えにより前輪から後輪となった車輪に付与するトーアウト角を小さくしたのでは、このトーアウト角をせいぜい0.5度程度しか設定することができず、
かかる僅かなトーアウト角では、希望するオーバーステア化(若しくはニュートラルステア化)の緩和を行い得ず、結果として車両をアンダーステア傾向に変化させることができないため、操縦安定性を確保することができない。
【0013】
本発明は、上記したようなトーアウト角の設定によるホイールアライメント制御では、上記のような新たな弊害も発生して、抜本的な問題解決を実現することができないとの観点から、
また走行方向前側車輪および走行方向後側車輪間の前後軸重配分制御によっても車両のステア特性を操作することができ、しかもこれによれば、上記新たな問題を伴うことなく、ニュートラルステア傾向の運転席方向可変車両を、運転席の向き(走行方向)にかかわらずアンダーステア傾向となし得て、何れ方向への走行時も操縦安定性を確保することができるとの事実認識に基づき、この着想を具体化した運転席方向可変車両を提案することを目的とする。
【課題を解決するための手段】
【0014】
この目的のため、本発明による運転席方向可変車両は、以下のごとくにこれを構成する。
先ず、本発明の要旨構成の基礎前提となる運転席方向可変車両を説明するに、これは、
車輪を懸架されて該車輪の回転により走行可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも前記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう前記車輪側車体上に載置したキャビン側車体とより成るものである。
【0015】
本発明は、かかる運転席方向可変車両が更に、以下のような前後軸重可変構造、つまり、
前記キャビン側車体の転向に伴い、前記運転席が前記車輪側車体の走行方向一方側に向くときは該走行方向一方側における車輪の走行方向一方側軸重が前記走行方向他方側における車輪の走行方向他方側軸重よりも大きくなり、前記運転席が前記車輪側車体の走行方向他方側に向くときは前記走行方向他方側軸重が前記走行方向一方側軸重よりも大きくなるようにする前後軸重可変構造を有した構成に特徴づけられるものである。
【発明の効果】
【0016】
上記した本発明による運転席方向可変車両にあっては、
運転席が車輪側車体の走行方向一方側に向くときは該走行方向一方側における車輪の走行方向一方側軸重が走行方向他方側における車輪の走行方向他方側軸重よりも大きくなり、運転席が車輪側車体の走行方向他方側に向くときは走行方向他方側軸重が走行方向一方側軸重よりも大きくなるため、
運転席の向きによって決まる走行方向の前側における車輪の前側軸重が、反対側における車輪の後側軸重よりも必ず大きくなることとなる。
【0017】
かかる前後軸重の大小関係は、運転席方向可変車両を運転席の向き(走行方向)にかかわらずアンダーステア傾向となし得て、何れ方向への走行時も所定の操縦安定性を確保することができる。
【0018】
しかも、かかる前後軸重可変構造による上記アンダーステア傾向(操縦安定性)の確保によれば、従来のホイールアライメント制御(後輪に対するトーアウト角設定)に頼ることなく上記の作用効果を達成し得るため、
ホイールアライメント制御に頼った場合の前記新たな問題、つまり、左右輪間横力差に起因して、不整路で車両の安定性が低下したり、走行抵抗の大幅増加によって燃費が悪化したり、車輪タイヤの摩耗が激しくなるなどの新たな問題を生ずることなく、上記の作用効果を達成することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施例になる運転席方向可変車両を示す概略平面図である。
【図2】図1における運転席方向可変車両の概略側面図である。
【図3】図1,2における運転席方向可変車両の運転席方向制御プログラムを示すフローチャートである。
【図4】図1,2における運転席方向可変車両の運転席が向いている方向と、車両全体としての重心位置との関係を示す説明図で、 (a)は、運転席が車輪側車体のA側方向に向いている場合における車両重心位置を示す説明図、 (b)は、運転席が車輪側車体のB側方向に向いている場合における車両重心位置を示す説明図である。
【図5】図1,2における運転席方向可変車両を構成する車輪側車体およびキャビン側車体のそれぞれの重心位置を個別に示す分解説明図である。
【図6】図1,2の運転席方向可変車両において、車輪側車体の前後方向重量配分を表すK1、および、キャビン側車体の前後方向重量配分を表すK2の組み合わせのうち、採用可能な組み合わせを、K1およびK2の二次元座標上に表示する領域線図である。
【図7】図6における採用可能なK1およびK2の組み合わせを、運転席方向可変車両の諸元が特定の値である場合につき示す、図6と同様な領域線図である。
【図8】図1,2における運転席方向可変車両の前後軸重配分と、ヨー共振周波数との関係を、従来技術適用時におけるヨー共振周波数の上昇代と比較して示す特性線図である。
【図9】本発明の第2実施例になる運転席方向可変車両の運転席が向いている方向と、車両全体としての重心位置との関係を示す説明図で、 (a)は、運転席が車輪側車体のA側方向に向いている場合における車両重心位置を示す説明図、 (b)は、運転席が車輪側車体のB側方向に向いている場合における車両重心位置を示す説明図である。
【図10】図9に示す第2実施例の運転席方向可変車両を構成する車輪側車体およびキャビン側車体のそれぞれの重心位置を個別に示す分解説明図である。
【図11】図9,10に示す運転席方向可変車両の前後軸重配分と、ヨー共振周波数との関係を、従来技術適用時におけるヨー共振周波数の上昇代と比較して示す特性線図である。
【図12】本発明の第3実施例になる運転席方向可変車両を示す、図2と同様な概略側面図である。
【図13】図12に示す第3実施例になる運転席方向可変車両の運転席方向制御およびバッテリストローク制御プログラムを示すフローチャートである。
【図14】図12の運転席方向可変車両を分解してキャビン側車体の重心位置と、このキャビン側車体および車輪側車体よりなる運転席方向可変車両の重心位置とを示す分解説明図で、 (a)は、運転席が車輪側車体のA側方向に向いている場合における車両重心位置を示す説明図、 (b)は、運転席が車輪側車体のB側方向に向いている場合における車両重心位置を示す説明図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
<第1実施例>
図1,2はそれぞれ、本発明の第1実施例になる運転席方向可変車両を示し、図1は、その概略平面図、図2は、その概略側面図である。
【0021】
図1,2に示す第1実施例の運転席方向可変車両は、車輪側車体1およびキャビン側車体2により概ね構成する。
車輪側車体1は、該車輪側車体1の走行方向一方側に左右輪3をサスペンション装置3aにより懸架して具えると共に、該車輪側車体1の走行方向他方側に左右輪4をサスペンション装置4aにより懸架して具え、これら車輪3,4の駆動および制動により車輪側車体1は走行および停止が可能なものとする。
【0022】
キャビン側車体2は、運転席5、運転席前方のコクピットモジュール6、および運転席斜め後方における2個の乗員席7を収容したキャビン8を有するドーム形状とし、キャビン側車体2の中心鉛直線Oの周りに回転して転向し得るよう車輪側車体1上に載置する。
この載置に当たっては、車体1側に固設したアウターレース9oおよび車体2側に固設したインナーレース9i間にボール9bを介在させてなるボールベアリング型式の軸受9を用いる。
【0023】
キャビン側車体2の中心鉛直線(回転軸線)Oの周りにおける転向は、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してこれを行うこととする。
【0024】
転向アクチュエータ11は、キャビン側車体2の回転位置を検出するキャビン側車体回転位置センサ(図示せず)を内蔵し、
これからの信号および運転席方向指令スイッチ(図示せず)からの信号を基に、コクピットモジュール6に設けたコントローラ12が転向アクチュエータ11を駆動制御して、キャビン側車体2の回転軸線Oの周りにおける転向位置を、運転席が運転席方向指令スイッチからの指令通り車輪側車体1の走行方向一方側(図示のごとく車輪3の側)または走行方向他方側(図示とは反対における車輪4の側)に向く位置となし得るようにする。
【0025】
なおキャビン側車体2の回転量は、上記のように運転席の向きを相互反転できる量であれば任意であり、
キャビン側車体2が180度だけ往復回転するものであっても、キャビン側車体2が360度に亘って回転するものであってもよい。
【0026】
車輪側車体1の走行および停止を司る車輪3,4の車輪駆動部および車輪制動部を以下に説明する。
【0027】
先ず車輪駆動部を説明するに、各車輪3,4に駆動結合して車輪駆動モータ21,22を設け、これらモータ21,22を車輪側車体1上に搭載する。
車輪駆動モータ21,22はそれぞれ、キャビン側車体2の床下に収納したバッテリ23からの電力を、インバータおよびコントローラよりなる駆動制御ユニット24,25による制御下で供給されることにより駆動制御され、かかる車輪駆動モータ21,22の駆動制御により運転席方向可変車両(車輪側車体1およびキャビン側車体2)を走行可能にする。
なおバッテリ23からの電力は、キャビン側車体2の回転(転向)を司る転向アクチュエータ11の駆動など、他の電気的アクチュエータの駆動にも供される。
【0028】
上記した運転席方向可変車両(車輪側車体1およびキャビン側車体2)の走行中における操舵は、
コクピットモジュール6に設けたステアリングホイール26からの操舵指令に応動して、同じくコクピットモジュール6に設けた前記コントローラ12がステアバイワイヤ式の操舵アクチュエータ27,28を介し、対応する車輪3,4を転舵することにより当該操舵を行うものとする。
【0029】
次に車輪制動部を説明するに、各車輪3,4に関連して車輪側車体1にドラムブレーキやディスクブレーキ等の摩擦制動ユニット29,31を設ける。
これら摩擦制動ユニット29,31による車輪3,4の摩擦制動は、コクピットモジュール6に設けたブレーキペダル32からの制動指令に応動して、同じくコクピットモジュール6に設けたコントローラ12が、ブレーキバイワイヤ式に摩擦制動ユニット29,31を液圧作動させることにより、対応する車輪3,4の当該摩擦制動を行うものとする。
【0030】
かかるブレーキバイワイヤ式摩擦制動制御は、転向アクチュエータ11によるキャビン側車体2の回転位置制御(運転席方向制御)と共に、前記したコントローラ12によりこれらを実行するものとする。
そのためコントローラ12には、ブレーキペダル32の踏み込み量に関する信号と、左右輪3の回転速度および左右輪4の回転速度に関する信号と、前記した運転席方向指令スイッチ(図示せず)からの信号と、前記した転向アクチュエータ11内におけるキャビン側車体回転位置センサ(図示せず)により検出されたキャビン側車体2の回転位置に関する信号とをそれぞれ入力する。
【0031】
コントローラ12は、これら入力情報および内部情報を基に、以下のごとくに運転席方向制御を行うと共に、本発明と関係ないため本明細書での説明を省略したブレーキバイワイヤ式摩擦制動制御を行う。
【0032】
<運転席方向制御>
コントローラ12は、図3の制御プログラムを実行して運転席の方向制御(キャビン側車体2の回転位置制御)を遂行する。
ステップS11においては、前記した運転席方向指令スイッチからの信号を基に、運転者が運転席5の方向転換(走行方向転換)を指令したのを検出する。
運転席5の方向転換が指令されるまでは、ステップS11が実行されないから、ここで待機する。
【0033】
運転席5の方向転換が指令され、ステップS11が実行されたら、ステップS12において、車輪3,4の回転速度を基に車体速度Vを推定する。
次のステップS13においては、上記推定した車体速度Vから運転席方向可変車両が停車状態か否かをチェックし、走行状態であればここで待機し、運転席5の方向転換指令によっても、運転席5の方向を現在の向きに保つ。
【0034】
ステップS13で運転席方向可変車両が停車状態であると判定した場合、ステップS14で車両を走行禁止により停車状態に保って、運転席の方向変更制御を以下の通りに行う。
ステップS15においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出する。
次のステップS16においては、検出した現在における運転席5の向きが、ステップS11で検出した運転席指令方向に一致するか否かをチェックする。
【0035】
ステップS16で現在における運転席5の向きが運転席指令方向に一致しないと判定する場合は、ステップS17においてキャビン側車体2を中心鉛直線Oの周りに回転させるべく転向アクチュエータ11を駆動する。
【0036】
転向アクチュエータ11の駆動によりキャビン側車体2が中心鉛直線Oの周りに回転されて、運転席5の向きが運転者の望む運転席指令方向に一致するとき、ステップS16がステップS17をスキップして制御をステップS18へ進めるため、
転向アクチュエータ11の駆動が停止され、キャビン側車体2の回転位置を、運転席5の向きが運転者の望む運転席指令方向に一致した回転位置に保つことができる。
【0037】
ステップS18においては、ステップS14で実行した車両の走行禁止を解除して、車両の走行を許可し、上記の通り運転席5の向きが運転者の望む運転席指令方向に一致した状態での走行を可能にする。
【0038】
<前後軸重可変構造>
本実施例においては、キャビン側車体2の上記回転位置制御により、運転席5が図4(a)に示すごとく車輪側車体1の走行方向一方側である図2のA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図4(b)に示すごとく車輪側車体1の走行方向他方側である図2のB側に向くときも(B側が前方となる走行時も)、走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにするが、そのための前後軸重可変構造を以下に説明するようなものとする。
【0039】
この前後軸重可変構造は、運転席5を図4(a)に示すごとく車輪側車体1のA側に向けてこのA側が前方となる方向へ走行する時、運転席方向可変車両の重心G0が図4(a)に示すように、車輪3および4間の中間位置(図示例ではキャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるA側の方向へオフセットされて、当該A側における車輪3(前輪)の軸重が、走行方向後方のB側における車輪4の軸重よりも大きくなるようにし、
逆に運転席5を図4(b)に示すごとく車輪側車体1のB側に向けてこのB側が前方となる方向へ走行する時、運転席方向可変車両の重心G0が図4(b)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるB側の方向へオフセットされて、当該B側における車輪4(前輪)の軸重が、走行方向後方のA側における車輪3の軸重よりも大きくなるようにするものである。
【0040】
運転席5の方向切り替え時における上記のような車両重心G0の前後車輪間中間位置(キャビン側車体回転軸線O)からのオフセット(前後車輪間軸重配分の切り替え)が可能となるようにするために、前後軸重可変構造を以下のような構成とする。
【0041】
つまり図5に示すように、キャビン側車体2の前記転向を生起させるための転向アクチュエータ11およびその出力軸上のギヤ11aより成る転向駆動部を前記した通りコクピットモジュール6に設けてキャビン側車体2に設置すると共に、車両の蓄電手段であるバッテリ23をキャビン側車体2の床下に収納し、
これら転向駆動部11,11aおよびバッテリ23を、キャビン側車体2の重心G2が図5に示すごとくキャビン側車体2の回転軸線Oよりも、運転席5の向いている方向へε2だけオフセットされるような位置に配置する。
【0042】
そして、キャビン側車体2の回転軸線Oに対してキャビン側車体2の重心G2を運転席5の向いている方向へオフセットさせる量ε2は、
同じく図5に例示する車輪側車体1のG1で示す重心位置、詳しくは車輪3,4間の中間位置にあるキャビン側車体2の回転軸線Oに対する車輪側車体重心G1の、車輪3または4側へのオフセット量(図5では車輪3側へのオフセット量ε1)との関連において、ε2>ε1となるよう決定する。
【0043】
かようにすることで、キャビン側車体2の重心G2および車輪側車体1の重心G1がそれぞれ図5に示すごときものである場合につき説明すると、
運転席5を図4(a)に示すごとく車輪側車体1のA側に向けてこのA側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図4(a)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるA側の方向へ(ε2+ε1)だけオフセットされて、当該A側における車輪3(前輪)の軸重が、走行方向後方のB側における車輪4の軸重よりもオフセット分だけ大きくなることになる。
また、逆に運転席5を図4(b)に示すごとく車輪側車体1のB側に向けてこのB側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図4(b)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるB側の方向へ(ε2−ε1)だけオフセットされて、当該B側における車輪4(前輪)の軸重が、走行方向後方のA側における車輪3の軸重よりもオフセット分だけ大きくなることになる。
【0044】
なお本実施例では、転向駆動部11,11aおよびバッテリ23の双方をキャビン側車体2上に設置し、これら転向駆動部11,11aおよびバッテリ23の前記配置により、キャビン側車体2の回転軸線Oに対してキャビン側車体2の重心G2を運転席5の向いている方向へε2だけオフセットさせるようにしたが、
要求オフセット量ε2が少ない場合は、転向駆動部11,11aおよびバッテリ23のいずれか一方のみをキャビン側車体2上に設置して、上記の要求が満足されるような位置に配置しても良いのは言うまでもないし、
また、転向駆動部11,11aおよびバッテリ23に代わる別の重量物をキャビン側車体2上に設置して、上記の要求が満足されるような位置に配置しても良いのは言うまでもない。
【0045】
<前後軸重配分の設定>
ここで、上記のようにして運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3の軸重よりも大きくなるようにする時における前後車輪間軸重配分要領について考察する。
【0046】
運転席方向可変車両全体としての前後軸重配分の制約条件は、車両全体の前後軸重配分比を
k:(1−k)
但し、k:(0<k<1)
とおくと、
図4(a),(b)につき上述したように運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなるようにすることを趣旨とするため、
k>0.5 ・・・(1)
であることが必須である。
【0047】
一方で、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存しているのが、車両の挙動安定性を確保するために肝要である。
本実施例においては前記した通り運転席方向可変車両の軸重配分が前軸寄りであることから、また車両には一般的に加速時よりも減速時の方が大きな前後加速度が加わることから、
上記の発生可能な最大前後加速度は、発生可能な最大減速度であると見なし、この最大減速度が運転席方向可変車両に付加された場合でも、走行方向後側となる車輪の軸重が残っているように、車両の前後軸重配分を設定することとする。
【0048】
ここで運転席方向可変車両の発生可能な最大減速度をα(符号は減速方向を正とし、値は、制動減速度と、路面勾配に応じた重力加速度成分との合成加速度であり、最大でも1.4G程度までを考慮しておけばよい)とし、車両の前後車輪間におけるホイールベースをLとし、車両の重心高さをhとしたとき、
車両に最大減速度αが付加された場合でも、走行方向後側となる車輪の軸重が残っているようにするためには、上記のkが、
k<{1−(h/L)×α} ・・・(2)
の条件を満足するものである必要がある。
【0049】
よって、運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなるようにすると共に、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存しているようにするためには、
運転席方向可変車両全体としての前後軸重配分を決定するに際して用いる前記のkは、前記(1)式および(2)式から、
0.5<k<{1−(h/L)×α} ・・・(3)
の条件を満足するものである必要がある。
そこで本実施例においては、運転席5の向き(運転席方向可変車両の走行方向)が何れの場合であっても、運転席方向可変車両の前後軸重配分を、上記(3)式を満足するkによって決まるようなものとなるように設定することとする。
【0050】
次に、運転席方向可変車両の前後軸重配分が上記のようになるための、車輪側車体1およびキャビン側車体2の前後方向重量配分設定について説明する。
車輪側車体1の前後方向重量配分が50:50に近いほど、また車輪側車体1の質量が小さいほど、考え方が単純となって好ましく、この場合は、キャビン側車体2を前記(3)式が満足されるような前後方向重量配分に設定するだけでよい。
【0051】
以下、具体的に説明する。
車輪側車体1と、キャビン側車体2との質量比をP:(1−P)とし(但し、0<P<1)、
車輪側車体1の前後方向重量配分比(図5のA側を前方とする)をK1:(1−K1)とし(但し、0<K1<1)、
キャビン側車体2の前後方向重量配分比をK2:(1−K2)とした場合(但し、0<K2<1)、
前記の(3)式の条件を満たすためには、運転席5の向きに応じて、以下の(4)式および(5)式を満足する必要がある。
【0052】
つまり、図3(a)に示すように、運転席5の向きを車輪側車体1のA側が前方となるようなものとして走行する場合は、
0.5<P・K1+(1−P)K2<{1−(h/L)×α} ・・・(4)
を満足する必要があり、また、
図3(b)に示すように、運転席5の向きを車輪側車体1のB側が前方となるようなものとして走行する場合は、
0.5−P <−P・K1+(1−P) K2<{1−(h/L)×α}−P ・・・(5)
を満足する必要がある。
【0053】
これら(4)式および(5)式は、車輪側車体1の前後方向重量配分を表すK1、および、キャビン側車体2の前後方向重量配分を表すK2の二次元座標上に表示すると、図6に示すごときものとなる。
これから明らかなように、運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなり、且つ、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存するようになすためには、
車輪側車体1の前後方向重量配分を表すK1、および、キャビン側車体2の前後方向重量配分を表すK2が、図6にハッチング付して示す領域内の組み合わせである必要がある。
【0054】
例えば、車輪側車体1とキャビン側車体2との質量比を表すPが0.3であり、また前記(4)式および(5)式中における{1−(h/L)×α}が0.7である場合につき、これら(4)式および(5)式をK1およびK2の二次元座標上に表すと図7に示すごときものとなり、
この図7にハッチング付して示す領域内におけるK1およびK2の組み合わせとなるよう車輪側車体1の前後方向重量配分およびキャビン側車体2の前後方向重量配分を決定すれば、
運転席5の向き(運転席方向可変車両の走行方向)に関わらず走行方向前方となる側における車輪3または4(前輪)の軸重が、走行方向後方となる反対側における車輪4または3(後輪)の軸重よりも大きくなり、且つ、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存するようになる。
【0055】
そして、車輪側車体1の前後方向重量配分が50:50であれば、K2が0.5よりも大きくなるようキャビン側車体2を構成するだけで、上記の要求を満足させることができる。
【0056】
以上のような前後軸重配分可変構造を有した運転席方向可変車両にあっては、運転席5の方向切り替えを行った場合に、車両の操縦安定性が以下に説明するように向上される。
ここでは、車両の操縦安定性を評価する指標として、図8の縦軸上に目盛ったヨー共振周波数(Hz)を用いる。
このヨー共振周波数は、操舵に対する車両の応答性の高さや、外乱に対する車両の自律的な安定性の高さに直接関係する指標であり、数値が高いほど車両の操縦安定性が高いことを意味する。
【0057】
図8の実線は、車輪側車体1の走行方向両側車輪3,4ともに、同じタイヤを履き、同じ特性のサスペンションで懸架されているため、前後の等価コーナリングパワー倍率が同じである運転席方向可変車両において、
車両全体の前後軸重配分(後輪軸重に対する前輪軸重の割合)を逐次変えた場合におけるヨー共振周波数の変化特性を例示するものである。
この図8から明らかなように、前側軸重が50%から70%となる前後軸重配分では、前後軸重配分が前寄りであるほどアンダーステア傾向によりヨー共振周波数が高くなって、操舵に対する車両の応答性が高くなると共に、外乱に対する車両の自律的な安定性が高くなって操縦安定性が増す。
【0058】
そして図8におけるA1点は、図4(a)に示すごとく運転席5が車輪側車体1のA側に向くとき(A側が前方となる走行時)のヨー共振周波数であり、また図8におけるB1点は、逆に運転席5が図4(b)に示すごとく車輪側車体1のB側に向くとき(B側が前方となる走行時)のヨー共振周波数である。
いずれの場合も、運転席方向可変車両の重心G0がキャビン側車体2の回転軸線Oより走行方向前方へオフセットされ、そのオフセット量(ε2+ε1、ε2−ε1)に応じ走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなって、車両をアンダーステア傾向にすることから、
ヨー共振周波数が高くなって、操舵に対する車両の応答性が高くなると共に、外乱に対する車両の自律的な安定性が高くなって操縦安定性が増す。
【0059】
図8におけるC1点は、前後軸重配分が50:50で、車輪タイヤが前後とも同じで、初期トー角以外のサスペンション設定が前後とも同じである車両に対し前記した従来技術の考え方を適用し、走行方向後方となる側の車輪にトーアウト角を付与した場合におけるヨー共振周波数の上昇を、参考までに示したものである。
【0060】
しかし、上記のトーアウト角を極端に大きく設定すると、前記した通り左右輪間横力差に起因して、不整路で車両の安定性が低下するほか、走行抵抗の大幅増加により燃費が悪化したり、車輪タイヤの摩耗が激しくなるなど、運転席方向可変車両にとって看過できない新たな問題を生ずることから、
図8におけるC1点は、この問題を考慮して上記のトーアウト角を約0.6度となし、走行方向前方車輪の等価コーナリングパワー倍率が0.9倍程度となるようにした場合におけるヨー共振周波数の上昇を示す。
このため従来の対策では、ヨー共振周波数の上昇代は、図8のC1点における程度しか得られず、極僅かである。
【0061】
<第1実施例の作用効果>
これに対し本実施例では、運転席が図4(a)に示すごとくA側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2+ε1)だけオフセットされ、運転席が図4(b)に示すごとくB側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2−ε1)だけオフセットされるようにして、運転席の向きに関わらず車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向前方に位置するようになし、これにより上記のオフセット量(ε2+ε1、ε2−ε1)に応じて走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにする前後軸重可変構造を有した構成になるから、
当該前後軸重配分により運転席方向可変車両のステア特性をアンダーステア傾向にすることができ、これにより車両のヨー共振周波数が高くなって、操舵に対する車両の応答性が高くなると共に、外乱に対する車両の自律的な安定性が高くなって操縦安定性を向上させることができる。
【0062】
そして本実施例のように、運転席の向きに関わらず走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも大きくなるようにして、どちら向きの走行時も高い操縦安定性が得られるようにした場合、
前記した従来の技術を運転席方向可変車両に適用して走行方向に応じタイヤトー角を変更させるホイールアライメント制御に頼るよりも、図8のA1,B1とC1との比較から明らかなように、ヨー共振周波数の上昇代が遙かに大きくて、車両の操縦安定性を確実に、且つ大きく向上させることができる。
【0063】
しかも、従来技術を適用して走行方向後側の車輪にトーアウト角を設定するホイールアライメント制御により所定の操縦安定性を確保しようとすると、前記した通り左右輪間横力差に起因して、不整路で車両の安定性が低下するほか、走行抵抗の大幅増加により燃費が悪化したり、車輪タイヤの摩耗が激しくなるなど、運転席方向可変車両にとって看過できない新たな問題を生ずるが、
本実施例のごとく、ホイールアライメント制御に頼らない前後軸重可変構造によって所定の操縦安定性を確保する場合、運転席方向可変車両にとって看過できない上記新たな問題を生ずることなく、前記の作用効果を達成することができる。
【0064】
更に本実施例においては、上記の作用効果を達成する前後軸重可変構造の設計に当たり前記した通り、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存するようにしたため、
どんな条件でも車輪に設置荷重が存在していることとなって、運転席方向可変車両の加減速時における挙動の安定性を確保することができる。
【0065】
また本実施例においては、運転席方向可変車両を以下のようなもの、つまり、キャビン側車体1が車輪側車体1に対し、車体上下方向へ延在する回転軸線Oの周りに相対回転して運転席5の向きを変えるようなものとし、
キャビン側車体2の重心位置G2をキャビン側車体回転軸線Oよりも、運転席5の向いている方向へオフセット(ε2)させて、前記の作用効果を達成する前後軸重可変構造が得られるようにしたため、
前後軸重配分制御機構のような追加の設備を何ら要することなく、運転席方向可変車両に不可欠な構成要件の配置を工夫して上記の前後軸重可変構造が得られるようにするだけで安価に、基本的な操縦安定性の確保が可能である。
【0066】
なお、運転席方向可変車両に不可欠な構成要件の配置を、上記基本的な操縦安定性の確保が可能となるよう工夫するに際し、本実施例のように、キャビン側車体2の転向駆動部11,11aをキャビン側車体2に設置し、この転向駆動部11,11aを、キャビン側車体2の重心位置G2がキャビン側車体回転軸線Oよりも、運転席5の向いている方向へオフセット(ε2)されるよう配置する場合、
余分なバラストを搭載したり、他の構成物の配置を変更したりすることなく、従って、車両重量の増大を伴うことなしに、またバラスト設置スペースの確保に苦慮することなしに、基本的な操縦安定性の確保が可能である。
【0067】
また、運転席方向可変車両に不可欠な構成要件の配置を、上記基本的な操縦安定性の確保が可能となるよう工夫するに際し、本実施例のように、車両走行用の電力を蓄電するバッテリ23をキャビン側車体2に設置し、このバッテリ23を、キャビン側車体2の重心位置G2がキャビン側車体回転軸線Oよりも、運転席5の向いている方向へオフセット(ε2)されるよう配置する場合も、
余分なバラストを搭載したり、他の構成物の配置を変更したりすることなく、基本的な操縦安定性の確保が可能であるが、
更に加えて、バッテリ23の質量が他の構成物と比較して大きいため、一層効率良く基本的な操縦安定性を確保することができる。
【0068】
<第2実施例>
上記した第1実施例では、運転席が図4(a)に示すごとくA側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2+ε1)だけオフセットされ、運転席が図4(b)に示すごとくB側の方向へ向く場合、車両重心G0がキャビン側車体2の回転軸線Oよりも走行方向へ(ε2−ε1)だけオフセットされるというように、運転席の向き(走行方向)によってキャビン側車体2の回転軸線Oに対する車両重心G0のオフセット量が異なり、操縦安定性をもたらすアンダーステア傾向の程度が走行方向によって異なる。
【0069】
しかし好ましくは、運転席5の向きに関わらずアンダーステア傾向の程度は同じである方が、何れの向きの走行時も同じ操縦安定性となって運転者に違和感を与えないないようにする意味合いにおいて良い。
第2実施例はこの要求に鑑み、運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図9(a),(b)にε2で示すように略同じになるようにする。
【0070】
この場合、運転席5の向き(走行方向)に関わらず、走行方向前方側車輪3または4の軸重が走行方向後方側車輪4または3の軸重よりも、上記のオフセット量ε2に応じた分だけ大きくなり、運転席5の向き(走行方向)の切り替え時も前後軸重配分、およびこれにより得られる操縦安定性の向上代が不変に保たれる。
かように、運転席5の向き(走行方向)の切り替え時も前後軸重配分が不変に保たれるよう、運転席5の向き(走行方向)が何れ方向であっても、キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を略同じにするための前後軸重可変構造を以下に説明する。
【0071】
なお本実施例でも、運転席方向可変車両を基本的には図1,2につき前述したと同じ構成となし、キャビン側車体2の転向(運転席5の方向)制御を図3につき前述したと同様に行うが、
本実施例においては、前後軸重可変構造を以下の点において第1実施例と異ならせることとする。
【0072】
つまり本実施例において前後軸重可変構造は、図10に示すように、先ず車輪側車体1自身を、走行方向一方側車輪3の軸重および走行方向他方側車輪4の軸重がほぼ同じになるよう構成して、その重心G1が車両走行方向において、車輪3,4間の中間位置{ホイールベースをLとした時、車輪3の接地点からLa=(1/2)Lの位置、および車輪4の接地点からLb=(1/2)Lの位置}に存在するようになす。
【0073】
そしてキャビン側車体2の回転軸線Oを、車輪側車体1の走行方向一方側車輪3および走行方向他方側車輪4間の中間位置に存在する車輪側車体1の重心G1とほぼ同じ位置に配置し、
キャビン側車体2の回転軸線Oに対する車輪側車体1の重心G1のオフセット量ε1を略0にする。
【0074】
また、キャビン側車体2の転向駆動部である転向アクチュエータ11およびその出力軸上のギヤ11aを第1実施例と同じくコクピットモジュール6に設けてキャビン側車体2に設置すると共に、車両の蓄電手段であるバッテリ23をキャビン側車体2の床下に収納し、
これら転向駆動部11,11aおよびバッテリ23を、キャビン側車体2の重心G2が図10に示すごとくキャビン側車体2の回転軸線Oよりも、運転席5の向いている方向へε2だけオフセットされるような位置に配置する。
【0075】
かようにすることで、キャビン側車体2の重心G2および車輪側車体1の重心G1がそれぞれ図10に示すごときものである場合につき説明すると、
運転席5を図9(a)に示すごとく車輪側車体1のA側に向けてこのA側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図9(a)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるA側の方向へ(ε2)だけオフセットされて、当該A側における車輪3(前輪)の軸重が、走行方向後方のB側における車輪4(後輪)の軸重よりも上記オフセット分だけ大きくされることになる。
【0076】
また、逆に運転席5を図9(b)に示すごとく車輪側車体1のB側に向けてこのB側が前方となる方向へ走行する時は、運転席方向可変車両の重心G0が図9(b)に示すように、車輪3および4間の中間位置(キャビン側車体2の回転軸線Oの位置)よりも、走行方向前方となるB側の方向へ(ε2)だけオフセットされて、当該B側における車輪4(前輪)の軸重が、走行方向後方のA側における車輪3(後輪)の軸重よりも上記オフセット分だけ大きくなることになる。
【0077】
上記のように、運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量が、図9(a),(b)にε2で示すように略同じになるようにしたことから、
運転席5の向き(走行方向)に関わらず、走行方向前方車輪の軸重と、走行方向後方車輪の軸重とが略同じ比に保たれたまま、前方車輪の軸重が後方車輪の軸重よりも大きくなることとなる。
【0078】
なお、図10に示すキャビン側車体2の重心位置G2に関わるキャビン側車体2の前記した前後方向重量配分比K2:(1−K2)を表すK2(但し、0<K2<1)は、
車輪側車体1の重心G1がキャビン側車体回転軸線Oと同じ位置にあってK1=0.5であることから、
このK1=0.5を前記(4)式および(5)式を代入して得られる次式を満足するように決定すればよい。
0.5< K2<{1/(1−P)}{1−(h/L)−0.5P} ・・・(6)
【0079】
<第2実施例の作用効果>
上記した第2実施例の構成によれば、第1実施例の前記した作用効果を全て奏し得るほか、以下の作用効果をも得ることができる。
つまり、運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図9(a),(b)にε2で示すように略同じになるようにしたため、
運転席5の向き(走行方向)に関わらず、走行方向前方車輪の軸重を走行方向後方車輪の軸重よりも大きくする時の前後軸重配分が略同じになり、この前後軸重配分で得られるアンダーステア傾向の程度も略同じとなり、何れの向きの走行時も狙い通りの同じ操縦安定性となって運転者に違和感を与えることがない。
【0080】
図8と同様な図11を用いて、本実施例の作用効果を更に付言する。
本実施例では、運転席5の向き(走行方向)に関わらず、キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図9(a),(b)にε2で示すように略同じになるようにし、走行方向前方車輪の軸重を走行方向後方車輪の軸重よりも大きくする時の前後軸重配分が略同じになるようにしたため、
運転席5が図9(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くとき(A側が前方となる走行時)のヨー共振周波数(A1点のヨー共振周波数)も、逆に運転席5が図9(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くとき(B側が前方となる走行時)のヨー共振周波数(B1点のヨー共振周波数)も、図11の横軸上に目盛った前後軸重配分が同じである時の値となり、何れの向きの走行時も狙い通りの同じ操縦安定性となって運転者に違和感を与えることがない。
【0081】
ところで、かかる作用効果を達成するための前後軸重可変構造を構築するに際し、本実施例においては、
図10に示すように、車輪側車体1自身を、走行方向一方側車輪3の軸重および走行方向他方側車輪4の軸重がほぼ同じになるよう構成して、その重心G1が車輪3,4間の中間位置に存在するようになすと共に、
キャビン側車体2の回転軸線Oを車輪側車体1の重心G1とほぼ同じ位置に配置し、
キャビン側車体2の重心G2を図10に示すごとくキャビン側車体2の回転軸線Oよりも、運転席5の向いている方向へε2だけオフセットさせたため、
キャビン側車体2の重心G2の上記オフセットε2のみにより、簡単かつ容易に第2実施例に特有な上記の作用効果を達成することができる。
【0082】
<第3実施例>
図12は、第3実施例になる運転席方向可変車両を示し、本実施例においては、運転席方向可変車両を基本的に図1,2につき前述したと同様な構成とするが、前後軸重可変構造を特に以下のようなものとする。
【0083】
つまり、バッテリ23を車輪側車体1上に、その走行方向へ変位可能にして設置する。
このバッテリ23の設置に際しては、車輪側車体1上にその走行方向へ延在させてリニヤガイド41を設け、このリニヤガイド41による案内下でバッテリ23を車輪側車体1に対し、その走行方向へ変位可能に支持する。
【0084】
バッテリ23を車輪側車体1に対し相対的に、車輪側車体1の走行方向へ変位させるための、ボールスクリュー式や油圧式を可とするリニヤアクチュエータ42を、車輪側車体1に取り付けて設け、
当該リニヤアクチュエータ42のアクチュエータロッド42aをバッテリ23に連結して蓄電手段変位機構を構成する。
かくして、リニヤアクチュエータ42の駆動によりバッテリ23を車輪側車体1に対し相対的に、車輪側車体1の走行方向へ自由に変位させることができる。
【0085】
かかる変位によりバッテリ23が車輪側車体1に対し如何なる相対位置に居るかを検出するためのバッテリストローク位置センサ43を、リニヤアクチュエータ42に沿わせて車輪側車体1に設ける。
リニヤアクチュエータ42によるバッテリ23のストローク位置は、運転席方向制御を司るコントローラ12により制御することとし、そのため上記バッテリストローク位置センサ43からの検出信号はコントローラ12に入力する。
【0086】
<運転席方向制御およびバッテリ位置制御>
コントローラ12は、バッテリストローク位置センサ43からの検出信号と、前記した各種入力情報とを基に図13の制御プログラムを実行して、図3につき前述したと同様な運転席5の方向制御を行うと同時に、リニヤアクチュエータ42の駆動によるバッテリ23のストローク位置制御を行う。
【0087】
ステップS21〜ステップS24は、図3におけるステップS11〜ステップS14と同じ処理を行うため、これらステップS21〜ステップS24の説明をここでは省略する。
ステップS11で運転者が運転席5の方向転換(走行方向転換)を指令したのを検出し、ステップS22〜ステップS24で走行禁止が実行されている間に選択されるステップS25においては、キャビン側車体2を回転させる転向アクチュエータ11の回転位置から現在における運転席5の向きを検出すると共に、上記バッテリストローク位置センサ43からの検出信号から現在におけるバッテリ23のストローク位置を検出する。
【0088】
次のステップS26においては、現在における運転席5の向きが、ステップS11で検出した運転席指令方向に一致しているか否かをチェックすると共に、現在におけるバッテリ23のストローク位置が、上記の運転席指令方向に応じて前記のように決まる車両重心G0の目標位置を実現するのに必要なバッテリ目標位置に一致しているか否かをチェックする。
【0089】
ステップS26で運転席5の向きが運転席指令方向に一致していないと判定する場合や、バッテリ23のストローク位置がバッテリ目標位置に一致していないと判定する場合は、
ステップS27において、キャビン側車体2を中心鉛直線Oの周りに回転させて運転席5の向きを運転席指令方向に一致させるべく転向アクチュエータ11を駆動したり、バッテリ23が目標位置に向かって変位され、バッテリ23のストローク位置がバッテリ目標位置に一致するようリニヤアクチュエータ42を駆動する。
【0090】
ここで、リニヤアクチュエータ42の駆動によるバッテリ23のストローク位置制御を以下に詳述する。
図14(a)に示すごとく、運転席5が車輪側車体1のA側に向くときは(A側が前方となる走行時は)、バッテリ23を同図(a)に矢印で示すA側方向へストロークさせて、走行方向前方車輪となる対応側車輪3の軸重を増大させると同時に、走行方向後方車輪となる反対側車輪4の軸重を低下させて、車両重心G0がキャビン側車体回転中心Oよりも走行方向前方へε0だけオフセットして位置するようになし、
図14(b)に示すごとく、運転席5が車輪側車体1のB側に向くときは(B側が前方となる走行時は)、バッテリ23を同図(b)に矢印で示すB側方向へストロークさせて、走行方向前方車輪となる対応側車輪4の軸重を増大させると同時に、走行方向後方車輪となる反対側車輪3の軸重を低下させて、車両重心G0がキャビン側車体回転中心Oよりも走行方向前方へε0だけオフセットして位置するようになす。
【0091】
かかるバッテリ23のストローク位置(車両重心G0の位置)制御に当たっては、運転席方向可変車両全体としての前後軸重配分を決定する際に用いる前記のkが、前記(3)式を満足するように当該制御を行い、
これにより、運転席5の向き(運転席方向可変車両の走行方向)に関わらず、運転席方向可変車両に、発生可能な最大前後加速度が付加された場合でも、走行方向どちら側の車輪にも軸重が残存しているようにする。
【0092】
なお本実施例では、バッテリ23のストローク位置(車両重心G0の位置)制御により前後軸重配分を任意に制御可能であることから、キャビン側車体2の重心G2が第1実施例や第2実施例のように、キャビン側車体回転軸線Oより運転席方向へオフセットしている必要はない。
しかし、キャビン側車体2の重心G2がキャビン側車体回転軸線Oより運転席方向と逆の方向へオフセットしていると、その分だけバッテリ23を図14(a),(b)に矢印で示す方向へストロークさせる量が多くなったり、或いは一層多くの質量を移動させることが必要になって不利であることから、
キャビン側車体2の重心G2は図14に示すごとく、キャビン側車体回転軸線Oから運転席方向と同じ方向へオフセットしているのが望ましい。
【0093】
転向アクチュエータ11の駆動によりキャビン側車体2が中心鉛直線Oの周りに回転されて、運転席5の向きが運転者の望む運転席指令方向に一致し、且つ、リニヤアクチュエータ42の駆動によりバッテリ23のストローク位置がバッテリ目標位置に一致するとき、ステップS26がステップS27をスキップして制御をステップS28へ進めるため、
転向アクチュエータ11およびリニヤアクチュエータ42の駆動が停止され、キャビン側車体2の回転位置を、運転席5の向きが運転者の望む運転席指令方向に一致した回転位置に保つことができると共に、バッテリ23を、そのストローク位置がバッテリ目標位置に一致する位置に保つことができる。
【0094】
ステップS28においては、ステップS24で実行した車両の走行禁止を解除して、車両の走行を許可し、上記の通り運転席5の向きが運転者の望む運転席指令方向に一致した状態での走行を可能にすると共に、上記の通りバッテリ23の上記ストローク位置制御により車両重心G0を、運転席5の向き(走行方向)に応じて決まる図14に例示する目標位置となした状態で、車両を走行させることが可能になる。
【0095】
<第3実施例の作用効果>
上記した第3実施例の構成によれば、運転席5が図14(a)に示すごとく車輪側車体1の走行方向一方側であるA側に向くときも(A側が前方となる走行時も)、逆に運転席5が図14(b)に示すごとく車輪側車体1の走行方向他方側であるB側に向くときも(B側が前方となる走行時も)、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量を、図14(a),(b)にε0で示すように略同じにし得るため、図11につき前述した第2実施例の作用効果を全て奏することができる。
【0096】
一方で、かかる作用効果を達成するための前後軸重可変構造を構築するに際し、本実施例においては、
図12〜14に示すように、バッテリ23を車輪側車体1に変位可能に設置し、キャビン側車体2が運転席5を車輪側車体1のA側に向かせる転向位置であるときは、バッテリ23をリニヤアクチュエータ42により運転席5の向いている方向へ変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させ、キャビン側車体2が運転席5を車輪側車体1のB側に向かせる転向位置であるときは、バッテリ23をリニヤアクチュエータ42により運転席5の向いている方向へ変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させるようにしたため、
キャビン側車体2の回転軸線Oに対する車両重心G0の走行方向前方へのオフセット量、つまり運転席方向可変車両の前後軸重配分を任意に制御可能であり、制御の自由度が高くなると共に、車両の走行条件ごとに制御態様を切り替えることさえ可能になる。
【0097】
<その他の実施例>
なお上記した第1実施例〜第3実施例ではいずれも、図1,2,12に示すように、軸受9を介しキャビン側車体2をその中心鉛直線Oの周りに回転可能にして車輪側車体1上に載置し、コクピットモジュール6に設けたモータなどの転向アクチュエータ11により、その出力軸に結着したギヤ11aを介してキャビン側車体2の転向を行うこととしたが、
キャビン側車体2の転向機構は、これに限られるものでなく任意の構造のものにし得るし、またキャビン側車体2の転向も、キャビン側車体2が両方向へ正逆回転することで当該転向を行うものに限らず、一方向へのみ回転することで当該転向を行うものであってもよい。
【0098】
また車輪3,4の駆動方式についても、図1,2につき前述したように各車輪3,4ごとに車輪駆動モータ21,22を設け、各車輪3,4を個々の車輪駆動モータ21,22で駆動するようにした所謂インホイールモータ式のものに限られず、
車輪側車体1の走行方向一方側および他方側にそれぞれ1つずつ車輪駆動モータを設けて、対応する側における左右一対の車輪3,4を共通なモータで駆動するようにした車輪駆動方式でもよいし、
全輪3,4に共通な1個のモータを設けて、これによりディファレンシャルギヤ装置およびドライブシャフトを介し全輪3,4を駆動するようにした車輪駆動方式でもよい。
【符号の説明】
【0099】
1 車輪側車体
2 キャビン側車体
3 走行方向一方側の左右輪
4 走行方向他方側の左右輪
5 運転席
6 コクピットモジュール
7 乗員席
8 キャビン
9 キャビン側車体支承軸受
11 転向アクチュエータ
12 コントローラ
21,22 車輪駆動モータ
23 バッテリ(蓄電手段)
24,25 車輪駆動制御ユニット
26 ステアリングホイール
27,28 操舵アクチュエータ
29,31 摩擦制動ユニット
32 ブレーキペダル
41 リニヤガイド
42 リニヤアクチュエータ
43 バッテリストローク位置センサ
【特許請求の範囲】
【請求項1】
車輪を懸架されて該車輪の回転により走行可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも前記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう前記車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両において、
前記キャビン側車体の転向に伴い、前記運転席が前記車輪側車体の走行方向一方側に向くときは該走行方向一方側における車輪の走行方向一方側軸重が前記走行方向他方側における車輪の走行方向他方側軸重よりも大きくなり、前記運転席が前記車輪側車体の走行方向他方側に向くときは前記走行方向他方側軸重が前記走行方向一方側軸重よりも大きくなるようにする前後軸重可変構造を有することを特徴とする運転席方向可変車両。
【請求項2】
請求項1に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記キャビン側車体が前記運転席を前記車輪側車体の走行方向一方側に向かせる転向位置であるとき、および、前記運転席を前記車輪側車体の走行方向他方側に向かせる転向位置であるときの双方において、車両に、発生可能な最大前後加速度が付加された場合でも、前記走行方向他方側車輪および走行方向一方側車輪の双方に軸重を残存させるようなものであることを特徴とする運転席方向可変車両。
【請求項3】
前記キャビン側車体が前記車輪側車体に対し、車体上下方向へ延在する回転軸線の周りに相対回転して前記転向を行うものである、請求項1または2に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記キャビン側車体の重心位置を前記キャビン側車体回転軸線よりも、前記運転席の向いている方向へオフセットさせたものであることを特徴とする運転席方向可変車両。
【請求項4】
請求項3に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記キャビン側車体の転向を生起させる転向駆動部を該キャビン側車体に設置し、該転向駆動部を、前記キャビン側車体の重心位置が前記キャビン側車体回転軸線よりも、前記運転席の向いている方向へオフセットされるよう配置させたものであることを特徴とする運転席方向可変車両。
【請求項5】
前記車両の走行を蓄電手段からの電力で行うようにした、請求項3または4に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記蓄電手段を該キャビン側車体に設置し、該蓄電手段を、前記キャビン側車体の重心位置が前記キャビン側車体回転軸線よりも、前記運転席の向いている方向へオフセットされるよう配置させたものであることを特徴とする運転席方向可変車両。
【請求項6】
請求項3〜5のいずれか1項に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記車輪側車体自身を、前記走行方向一方側軸重および走行方向他方側軸重がほぼ同じになるよう構成し、
前記キャビン側車体回転軸線を、前記車輪側車体の走行方向一方側車輪および走行方向他方側車輪間に存在する、車輪側車体の重心位置に位置させたものであることを特徴とする運転席方向可変車両。
【請求項7】
前記車両の走行を蓄電手段からの電力で行うようにした、請求項1または2に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記蓄電手段を該車輪側車体に変位可能に設置し、
前記キャビン側車体が前記運転席を前記車輪側車体の走行方向一方側に向かせる転向位置であるときは該走行方向一方側へ前記蓄電手段を変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させ、前記キャビン側車体が前記運転席を前記車輪側車体の走行方向他方側に向かせる転向位置であるときは該走行方向他方側へ前記蓄電手段を変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させる蓄電手段変位機構を具えたものであることを特徴とする運転席方向可変車両。
【請求項1】
車輪を懸架されて該車輪の回転により走行可能な車輪側車体と、運転席収容キャビンを有して運転席が少なくとも前記車輪側車体の走行方向一方側および走行方向他方側に向く位置へ転向し得るよう前記車輪側車体上に載置したキャビン側車体とより成る運転席方向可変車両において、
前記キャビン側車体の転向に伴い、前記運転席が前記車輪側車体の走行方向一方側に向くときは該走行方向一方側における車輪の走行方向一方側軸重が前記走行方向他方側における車輪の走行方向他方側軸重よりも大きくなり、前記運転席が前記車輪側車体の走行方向他方側に向くときは前記走行方向他方側軸重が前記走行方向一方側軸重よりも大きくなるようにする前後軸重可変構造を有することを特徴とする運転席方向可変車両。
【請求項2】
請求項1に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記キャビン側車体が前記運転席を前記車輪側車体の走行方向一方側に向かせる転向位置であるとき、および、前記運転席を前記車輪側車体の走行方向他方側に向かせる転向位置であるときの双方において、車両に、発生可能な最大前後加速度が付加された場合でも、前記走行方向他方側車輪および走行方向一方側車輪の双方に軸重を残存させるようなものであることを特徴とする運転席方向可変車両。
【請求項3】
前記キャビン側車体が前記車輪側車体に対し、車体上下方向へ延在する回転軸線の周りに相対回転して前記転向を行うものである、請求項1または2に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記キャビン側車体の重心位置を前記キャビン側車体回転軸線よりも、前記運転席の向いている方向へオフセットさせたものであることを特徴とする運転席方向可変車両。
【請求項4】
請求項3に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記キャビン側車体の転向を生起させる転向駆動部を該キャビン側車体に設置し、該転向駆動部を、前記キャビン側車体の重心位置が前記キャビン側車体回転軸線よりも、前記運転席の向いている方向へオフセットされるよう配置させたものであることを特徴とする運転席方向可変車両。
【請求項5】
前記車両の走行を蓄電手段からの電力で行うようにした、請求項3または4に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記蓄電手段を該キャビン側車体に設置し、該蓄電手段を、前記キャビン側車体の重心位置が前記キャビン側車体回転軸線よりも、前記運転席の向いている方向へオフセットされるよう配置させたものであることを特徴とする運転席方向可変車両。
【請求項6】
請求項3〜5のいずれか1項に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記車輪側車体自身を、前記走行方向一方側軸重および走行方向他方側軸重がほぼ同じになるよう構成し、
前記キャビン側車体回転軸線を、前記車輪側車体の走行方向一方側車輪および走行方向他方側車輪間に存在する、車輪側車体の重心位置に位置させたものであることを特徴とする運転席方向可変車両。
【請求項7】
前記車両の走行を蓄電手段からの電力で行うようにした、請求項1または2に記載された運転席方向可変車両において、
前記前後軸重可変構造は、前記蓄電手段を該車輪側車体に変位可能に設置し、
前記キャビン側車体が前記運転席を前記車輪側車体の走行方向一方側に向かせる転向位置であるときは該走行方向一方側へ前記蓄電手段を変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させ、前記キャビン側車体が前記運転席を前記車輪側車体の走行方向他方側に向かせる転向位置であるときは該走行方向他方側へ前記蓄電手段を変位させて対応側車輪の軸重を増大させると同時に反対側車輪の軸重を低下させる蓄電手段変位機構を具えたものであることを特徴とする運転席方向可変車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−178287(P2011−178287A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−44876(P2010−44876)
【出願日】平成22年3月2日(2010.3.2)
【出願人】(000003997)日産自動車株式会社 (16,386)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月2日(2010.3.2)
【出願人】(000003997)日産自動車株式会社 (16,386)
[ Back to top ]