
運転支援システム、運転システムの運転支援方法、速度算出装置および速度算出プログラム
【課題】速度検出のためのDSRC通信や路面センサを別々に装置を配置しなくても、速度を出している通行車両の運転者に注意を促すことができるようにすることを目的とする。
【解決手段】レーザセンサ110は車両190をレーザ光を用いて観測する。レーザセンサ処理装置200は、レーザセンサ110により観測された観測結果に基づいて車両190の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する。さらに、レーザセンサ処理装置200は、複数の車両モデルが表す複数の走行位置に基づいて異なる時刻間の走行距離を算出し、算出した走行距離に基づいて車両190の走行速度を算出する。路側処理装置300は、車両190の走行速度が所定速度を超えているか否かを判定する。DSRC無線装置130は、車両190の走行速度が所定速度を超えている場合、所定メッセージを表示する。
【解決手段】レーザセンサ110は車両190をレーザ光を用いて観測する。レーザセンサ処理装置200は、レーザセンサ110により観測された観測結果に基づいて車両190の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する。さらに、レーザセンサ処理装置200は、複数の車両モデルが表す複数の走行位置に基づいて異なる時刻間の走行距離を算出し、算出した走行距離に基づいて車両190の走行速度を算出する。路側処理装置300は、車両190の走行速度が所定速度を超えているか否かを判定する。DSRC無線装置130は、車両190の走行速度が所定速度を超えている場合、所定メッセージを表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、運転支援システム、運転システムの運転支援方法、速度算出装置および速度算出プログラムに関するものである。
【背景技術】
【0002】
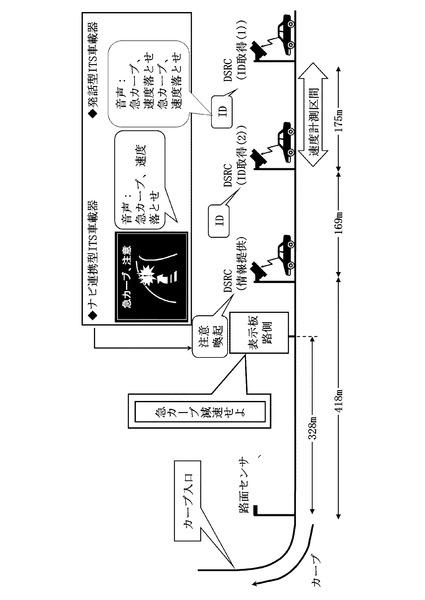
図12は、従来の安全速度警報システムを示す概要図である。
図12に示すように、従来の安全速度警報システムでは、速度を計測するためにDSRC(Dedicated Short Range Communication)通信で車載器のLID(リンクID)を取得するアンテナを前後2箇所に配置する。
そして、その2点間の距離と通信した時刻とに基づいて通行車両の速度を計測していた。
さらに、路面の状態を計測するための路面センサを配置し、路面が乾燥状態か湿潤状態かを判断していた。
そして、収集した通行車両の速度や路面の状態に基づいて通行車両が速度を出し過ぎているか否かを判定し、路側表示機やDSRC無線設備で運転者に注意を促していた。
【0003】
つまり、従来の安全速度警報システムでは、速度計測のためのセンサ(DSRC無線設備)と路面状態を判定するための路面センサとを用いる必要がある。
また、通行車両にDSRC通信を行う車載器が搭載されていない場合、通行車両の速度を計測することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−46699号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、例えば、DSRC通信を行わなくても、速度を出している通行車両の運転者に注意を促すことができるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の運転支援システムは、
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサと、
前記レーザセンサにより観測された観測結果に基づいて前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成し、生成した複数の車両モデルが表す複数の走行位置に基づいて前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出装置と、
前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定する速度判定装置と、
前記速度判定装置により前記走行車両の走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する路側表示装置とを備える。
【発明の効果】
【0007】
本発明によれば、例えば、速度検出のためのDSRC通信や路面センサを別々に装置を配置しなくても、速度を出している通行車両の運転者に注意を促すことができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1における安全速度警報システム100の概要図。
【図2】実施の形態1におけるレーザセンサ処理装置200の機能構成図。
【図3】実施の形態1における路側処理装置300の機能構成図。
【図4】実施の形態1における安全速度警報システム100の安全速度警報方法を示すフローチャート。
【図5】実施の形態1における2つの車両モデル291を表示した平面図。
【図6】実施の形態1における車種データ292を示すデータ。
【図7】実施の形態1における安全速度データ391を示す図。
【図8】実施の形態1におけるレーザセンサ処理装置200および路側処理装置300のハードウェア資源の一例を示す図。
【図9】実施の形態2における安全速度警報システム100の構成図。
【図10】実施の形態2におけるステレオカメラ処理装置201の機能構成図。
【図11】実施の形態2における安全速度警報システム100の安全速度警報方法を示すフローチャート。
【図12】従来の安全速度警報システムを示す概要図。
【発明を実施するための形態】
【0009】
実施の形態1.
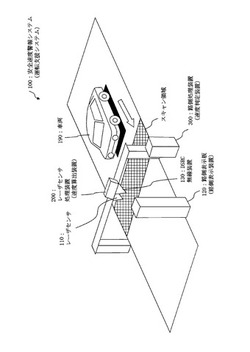
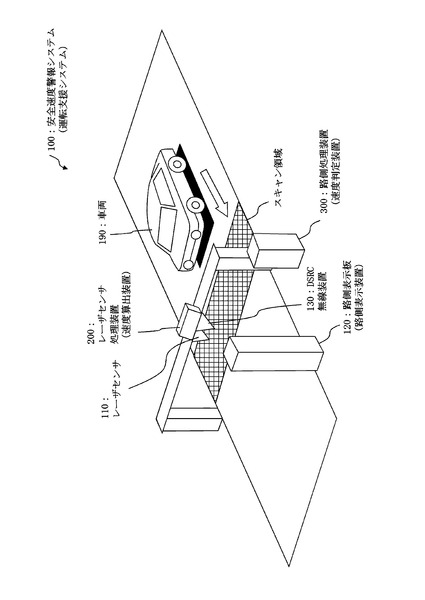
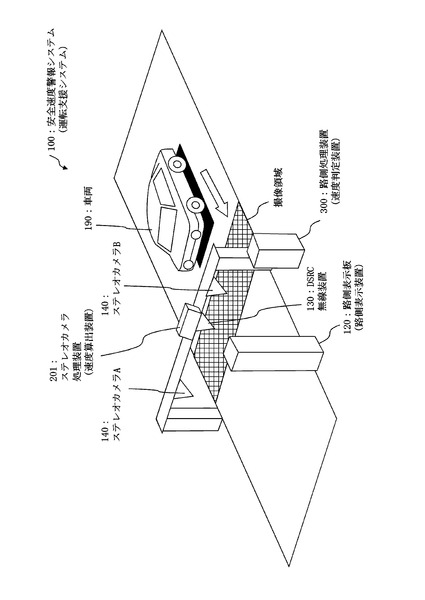
図1は、実施の形態1における安全速度警報システム100の概要図である。
実施の形態1における安全速度警報システム100の概要について、図1に基づいて説明する。
【0010】
安全速度警報システム100(運転支援システムの一例)は、レーザセンサ110、レーザセンサ処理装置200、路側処理装置300、路側表示板120およびDSRC無線装置130を備える。
【0011】
レーザセンサ110は道路に設置される。例えば、レーザセンサ110は高速道路に設けられた門構え(ゲート)の上部に車両190と対面する向きで設置される。レーザセンサ110は道路脇(路肩)に設けた柱(ポール)の上部に設置しても構わない。
レーザセンサ110は、道路の所定のスキャン領域(図中の網掛け部分)を対象にして道路を走行する車両190または道路の路面をレーザ光を用いて観測する。
【0012】
レーザセンサ処理装置200(速度算出装置の一例)は、レーザセンサ110により観測された観測結果に基づいて、車両190の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する。
レーザセンサ処理装置200は、生成した複数の車両モデルが表す複数の走行位置に基づいて、異なる時刻間の車両190の走行距離を算出する。
レーザセンサ処理装置200は、算出した車両190の走行距離に基づいて車両190の走行速度を算出する。
レーザセンサ処理装置200は、生成した少なくともいずれかの車両モデルが表す車両190の車両形状に基づいて車両190の車種を判定する。
レーザセンサ処理装置200は、レーザセンサ110により観測された路面の観測結果に基づいて道路の路面状態を判定する。
【0013】
路側処理装置300(速度判定装置の一例)は、レーザセンサ処理装置200により算出された車両190の走行速度が所定速度を超えているか否かを判定する。
【0014】
例えば、路側処理装置300は以下のような判定を行う。
路側処理装置300は、レーザセンサ処理装置200により判定された車両190の車種に基づいて、車両190の走行速度が車両190の車種に対応する所定速度を超えているか否かを判定する。
路側処理装置300は、レーザセンサ処理装置200により判定された道路の路面形状に基づいて、車両190の走行速度が車両190の車種と道路の路面状態とに対応する所定速度を超えているか否かを判定する。
【0015】
路側表示板120(路側表示装置の一例)は、路側処理装置300により車両190の走行速度が所定速度を超えていると判定された場合、減速を促す所定メッセージを表示する。
【0016】
DSRC無線装置130は、路側処理装置300により車両190の走行速度が所定速度を超えていると判定された場合、車両190の走行速度が所定速度を超えていることを車両190の車載器に通知する。
車両190の車載器は、DSRC無線装置130から通知を受けた場合、カーナビゲーションシステムなどを用いて減速を促す所定メッセージを出力する。
【0017】
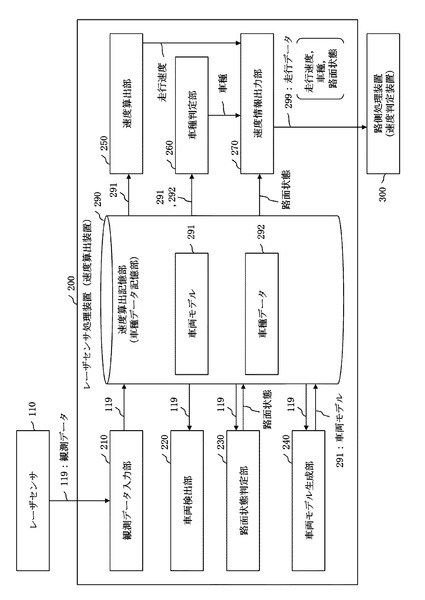
図2は、実施の形態1におけるレーザセンサ処理装置200の機能構成図である。
実施の形態1におけるレーザセンサ処理装置200の機能構成について、図2に基づいて説明する。
【0018】
レーザセンサ処理装置200(速度算出装置の一例)は、観測データ入力部210、路面状態判定部230、車両検出部220、車両モデル生成部240、速度算出部250、車種判定部260、速度情報出力部270および速度算出記憶部290を備える。
【0019】
観測データ入力部210は、レーザセンサ110が観測して得た観測結果を観測データ119として入力する。
【0020】
レーザセンサ110は、道路の所定のスキャン領域に向けて複数のレーザ光を照射し、スキャン領域で反射して戻ってきた複数のレーザ光を複数の反射光として検出し、検出した反射光毎にレーザ光を照射してから反射光を検出するまでの時間を反射光の遅延時間として計測する。また、レーザセンサ110は、検出した反射光毎に反射光の強度(信号強度、電圧強度)を計測する。
観測データ119は、検出された反射光毎に反射光の遅延時間と反射光の強度とレーザ光の照射方向とを対応付けて示すデータである。
【0021】
車両検出部220は、第1の観測データ119が示す少なくともいずれかの遅延時間に基づいて、スキャン領域を車両が走行しているか否かを判定する。
【0022】
路面状態判定部230は、特定の観測データ119が示す少なくともいずれかの反射光の強度に基づいて、道路の路面が乾燥しているか否かを路面状態として判定する。
【0023】
車両モデル生成部240は、車両検出部220によりスキャン領域を車両が走行していると判定された場合、第1の観測データ119が示す複数の遅延時間に基づいて第1の車両モデル291を生成し、第2の観測データ119が示す複数の遅延時間に基づいて第2の車両モデル291を生成する。
車両モデル291は、スキャン領域を走行している走行車両の車両形状(大きさを含む)と走行車両の走行位置とを表すデータである。
【0024】
速度算出部250は、第1の車両モデル291が表す走行位置から第2の車両モデル291が表す走行位置までの距離を走行車両の走行距離として算出する。
速度算出部250は、第1の計測時(第1の観測データ119を得るための観測時)から第2の計測時(第2の観測データ119を得るための観測時)までの時間を走行車両の走行時間として算出する。
速度算出部250は、算出した走行時間と走行距離とに基づいて走行車両の走行速度を算出する。
【0025】
車種判定部260は、第1の車両モデル291と第2の車両モデル291との少なくともいずれかが表す走行車両の大きさと車種データ292とに基づいて走行車両の車種を判定する。
車種データ292は、車種と車両の大きさとを対応付けたデータである。
【0026】
速度情報出力部270は、速度算出部250により算出された走行車両の走行速度と車種判定部260により判定された走行車両の車種と路面状態判定部230により判定された道路の路面状態とを含む走行データ299を路側処理装置300に出力する。
【0027】
速度算出記憶部290は、レーザセンサ処理装置200で使用するデータを記憶する。
車両モデル291、車種データ292および走行データ299は、速度算出記憶部290に記憶されるデータの一例である。
【0028】
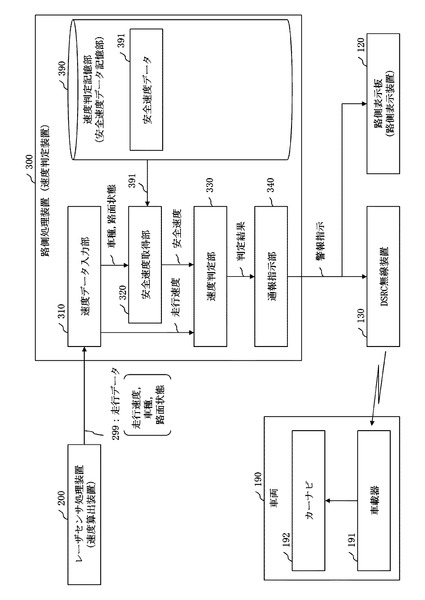
図3は、実施の形態1における路側処理装置300の機能構成図である。
実施の形態1における路側処理装置300の機能構成について、図3に基づいて説明する。
【0029】
路側処理装置300(速度判定装置の一例)は、速度データ入力部310、安全速度取得部320、速度判定部330、通報指示部340および速度判定記憶部390を備える。
【0030】
速度データ入力部310は、レーザセンサ処理装置200により生成された走行データ299を入力する。
走行データ299は、走行車両の走行速度と走行車両の車種と道路の路面状態とを示すデータである。
【0031】
安全速度取得部320は、走行データ299が示す走行車両の車種と道路の路面状態とに対応する安全速度を安全速度データ391から取得する。
安全速度データ391は、車種と路面状態と安全速度とを対応付けたデータである。
【0032】
速度判定部330は、走行データ299が示す走行車両の走行速度と安全速度取得部320により取得された安全速度とを比較し、走行車両の走行速度が安全速度を超えているか否かを判定する。
【0033】
通報指示部340は、速度判定部330により走行車両の走行速度が安全速度を超えていると判定された場合、路側表示板120とDSRC無線装置130とに警報指示を出力する。
【0034】
速度判定記憶部390(安全速度データ記憶部の一例)は、路側処理装置300で使用するデータを記憶する。
安全速度データ391や走行データ299は、速度判定記憶部390に記憶するデータの一例である。
【0035】
路側表示板120(路側表示装置の一例)は、レーザセンサ110から走行車両の進行方向に特定距離だけ離れた位置に設置される装置である。
路側表示板120は、路側処理装置300から警報指示を受けた場合、減速を促す所定のメッセージを表示する。
【0036】
DSRC無線装置130は、レーザセンサ110の近くに設置される装置である。
DSRC無線装置130は、路側処理装置300から警報指示を受けた場合、走行車両(車両190)の車載器191に走行速度が安全速度を超えていることを通知する。
車載器191は、DSRC無線装置130から通知を受けた場合、カーナビゲーションシステム(以下、カーナビ192)などを用いて、減速を促す所定のメッセージを出力する。
【0037】
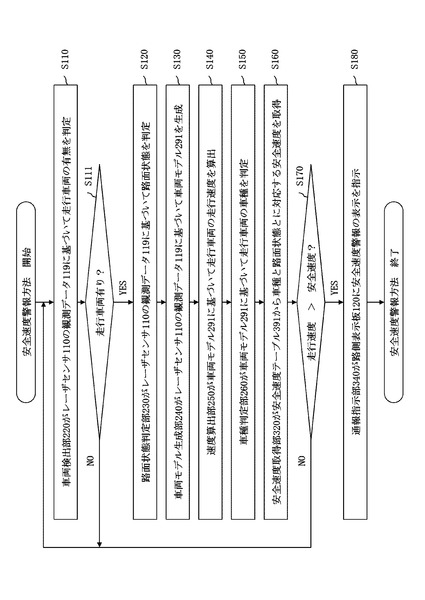
図4は、実施の形態1における安全速度警報システム100の安全速度警報方法を示すフローチャートである。
実施の形態1における安全速度警報方法の処理の流れについて、図4に基づいて説明する。
【0038】
まず、安全速度警報方法(運転支援方法の一例)の処理の概要について説明する。
【0039】
車両検出部220は、レーザセンサ110の観測データ119に基づいて走行車両の有無を判定する(S110:車両検出処理)。
走行車両が存在する場合(S111「YES」)、路面状態判定部230は、レーザセンサ110の観測データ119に基づいて路面状態を判定する(S120:路面状態判定処理)。
車両モデル生成部240は、レーザセンサ110の観測データ119に基づいて車両モデル291を生成する(S130:車両モデル生成処理)。
速度算出部250は、車両モデル291に基づいて走行車両の走行速度を算出する(S140:走行速度算出処理)。
車種判定部260は、車両モデル291に基づいて走行車両の車種を判定する(S150:車種判定処理)。
安全速度取得部320は、安全速度データ391から車種と路面状態とに対応する安全速度を取得する(S160:安全速度取得処理)。
速度判定部330は、走行車両の走行速度と安全速度とを比較する(S170:走行速度判定処理)。
走行車両の走行速度が安全速度を超えている場合(S170「YES」)、通報指示部340は、路側表示板120に安全速度警報の表示を指示する(S180:メッセージ表示処理)。
【0040】
次に、安全速度警報方法の処理の詳細について説明する。
【0041】
S110において、レーザセンサ110は、道路の長さ方向と道路の幅方向とにポリゴンミラーなどを回転させながら道路の所定のスキャン領域に向けて複数のレーザ光を照射する。そして、レーザセンサ110は、スキャン領域から戻ってきた複数の反射光を検出し、検出した反射光毎にレーザ光を照射してから反射光を検出するまでの時間(反射光の遅延時間)と反射光の強度とを計測する。以下、この一連の処理のことを「レーザスキャン処理」という。
レーザセンサ110は、レーザスキャン処理を繰り返し、レーザスキャン処理毎に観測データ119を生成し、生成した観測データ119をレーザセンサ処理装置200へ出力する。
観測データ119は、1回のレーザスキャン処理で得られるデータであり、検出された反射光毎に反射光の遅延時間と反射光の強度とレーザ光の照射方向とを対応付けたレーザ点データを含んだデータである。つまり、観測データ119は、複数のレーザ点データを含んだレーザ点群データである。
さらに、観測データ119は、レーザスキャン処理の処理時刻(例えば、レーザスキャン処理の開始時刻)を含む。
【0042】
S110において、レーザセンサ処理装置200の観測データ入力部210は、レーザセンサ110から出力された観測データ119を入力し、入力した観測データ119を速度算出記憶部290に記憶する。
【0043】
S110において、車両検出部220は、速度算出記憶部290から観測データ119を取得し、取得した観測データ119に基づいて走行車両の有無を判定する。
走行車両が存在しない場合にはレーザセンサ110から照射されたレーザ光は路面で反射し、走行車両が存在する場合、レーザセンサ110から照射されたレーザ光は走行車両で反射する。このため、走行車両で反射した反射光の遅延時間は、路面で反射した反射光の遅延時間に比べて、走行車両の高さ分だけ短い時間になる。
【0044】
例えば、車両検出部220は、以下のように走行車両の有無を判定する。
車両検出部220は、観測データ119に示される複数の反射光の遅延時間のうち所定の車両判定時間より短い反射光の遅延時間の数を短時間遅延数として算出し、算出した短時間遅延数を所定の車両判定数と比較する。
そして、車両検出部220は、短時間遅延数が車両判定数より多い場合に車両が存在すると判定し、短時間遅延数が車両判定数以下の場合に車両が存在しないと判定する。
【0045】
但し、レーザ光の照射方向によってレーザセンサ110と路面との距離は異なるため、レーザ光の照射方向と車両判定時間とを対応付けた車両判定時間テーブルを速度算出記憶部290に予め記憶してもよい。
この場合、車両検出部220は、観測データ119に含まれるレーザ点データ毎にレーザ点データが示すレーザ光の照射方向に対応する車両判定時間を車両判定時間テーブルから取得する。
そして、車両検出部220は、レーザ点データ毎にレーザ点データが示す反射光の遅延時間と車両判定時間テーブルから取得した車両判定時間とを比較する。
【0046】
S110の処理は、S111以降の処理中にも繰り返し実行する。但し、S110の処理のうち、レーザセンサ110の処理および観測データ入力部210の処理をS120以降の処理中に繰り返し実行しても構わない。つまり、車両検出部220の処理をS120以降の処理中に実行しなくても構わない。
【0047】
S110の後、S111に進む。
【0048】
S111において、走行車両が存在すると判定された場合(YES)、S120に進む。
走行車両が存在しないと判定された場合(NO)、S110に戻る。
【0049】
S120において、路面状態判定部230は、速度算出記憶部290から観測データ119を取得し、取得した観測データ119に示される反射光の強度に基づいて道路の路面状態を判定する。
路面状態とは、路面が観測しているか否かを示す状態のことである。路面が乾燥している場合(例えば、晴天の場合)、路面が濡れている場合(例えば、雨天の場合)に比べて、反射光の強度が強い。路面が濡れている場合、路面に水膜ができて拡散反射が少なくなるためである。
【0050】
例えば、路面状態判定部230は、以下のように路面状態を判定する。
路面状態判定部230は、観測データ119から所定の車両判定時間(S110参照)以上の反射光の遅延時間を示す複数のレーザ点データを複数の路面点データとして抽出する。路面点データは、路面で反射した反射光の遅延時間および強度を示すレーザ点データである。
路面状態判定部230は、抽出した複数の路面点データに基づいて反射光の強度の平均値を路面の反射強度として算出し、算出した路面の反射強度を所定の路面判定強度と比較する。
そして、路面状態判定部230は、路面の反射強度が路面判定強度より大きい場合に路面が乾燥していると判定し、路面の反射強度が路面判定強度以下の場合に路面が濡れていると判定する。
【0051】
但し、路面状態判定部230は、複数の路面点データから所定数の路面点データをランダムに取得し、取得した所定数の路面点データに基づいて反射光の強度の平均値を路面の反射強度として算出しても構わない。
【0052】
また、3種類以上の路面状態(例えば、乾燥している状態、濡れている状態、凍結している状態、積雪している状態)に対応付けて路面判定強度の範囲を設定した路面判定テーブルを予め速度算出記憶部290に記憶しても構わない。この場合、路面状態判定部230は、路面判定テーブルを参照して路面の反射強度を含む路面判定強度の範囲を判定し、判定した路面判定強度の範囲に対応する路面状態を路面判定テーブルから取得する。
【0053】
また、路面状態判定部230は、車両検出部220により走行車両が存在しないと判定された場合に、判定に用いられた観測データ119に基づいて道路の路面状態を判定しても構わない。
【0054】
S120の後、S130に進む。
【0055】
S130において、車両モデル生成部240は、速度算出記憶部290から複数の観測データ119を取得し、取得した複数の観測データ119に基づいて複数の車両モデル291を生成し、生成した複数の車両モデル291を速度算出記憶部290に記憶する。車両モデル291は、走行車両の車両形状(大きさを含む)と走行車両の走行位置とを表すデータである。
例えば、車両モデル生成部240は、車両検出部220が走行車両の有無の判定(S110)に用いた観測データ119と、その観測データ119の次に生成された観測データ119とに基づいて2つの車両モデル291を生成する。
【0056】
車両モデル生成部240は、例えば、以下のように車両モデル291を生成する。
車両モデル生成部240は、観測データ119から所定の車両判定時間(S110参照)より短い反射光の遅延時間を示す複数のレーザ点データを複数の対象点データとして抽出する。対象点データは、走行車両で反射した反射光の遅延時間とレーザ光の照射方向とを示すレーザ点データである。
車両モデル生成部240は、抽出した対象点データ毎に対象点データが示す反射光の遅延時間に光速度を乗算してレーザセンサ110から走行車両(レーザ光の反射地点)までの往復距離を算出する。そして、車両モデル生成部240は、算出した往復距離を半分にした距離をレーザセンサ110から走行車両までの車両距離(反射地点距離)として算出する。
そして、車両モデル生成部240は、抽出した対象点データ毎に車両距離と対象点データが示すレーザ光の照射方向とを対応付けて距離方位点データを生成し、生成した複数の距離方位点データを含んだデータを距離方位点群データとして生成する。走行車両は、レーザセンサ110からレーザ光の照射方向に車両距離だけ離れた地点に位置する。
車両モデル生成部240は、距離方位点群データに基づいて距離方位点データ毎に走行車両が位置する地点の座標値(走行車両の座標値)を算出する。このとき、車両モデル生成部240は、レーザセンサ110の座標値から距離方位点データが示すレーザ光の照射方向に距離方位点データが示す車両距離だけ離れた地点の座標値を走行車両の座標値として算出する。レーザセンサ110の座標値は、例えば、速度算出記憶部290に予め記憶しておく。
車両モデル生成部240は、距離方位点データ毎に走行車両の座標値を示す座標点データ(三次元点データ)を生成し、生成した複数の座標点データを含んだデータを車両モデル291(座標点群データ、三次元点群データ)として生成する。
【0057】
S130の後、S140に進む。
【0058】
S140において、速度算出部250は、車両モデル生成部240により生成された複数の車両モデル291を速度算出記憶部290から取得し、取得した複数の車両モデル291に基づいて走行車両の走行速度を算出する。
【0059】
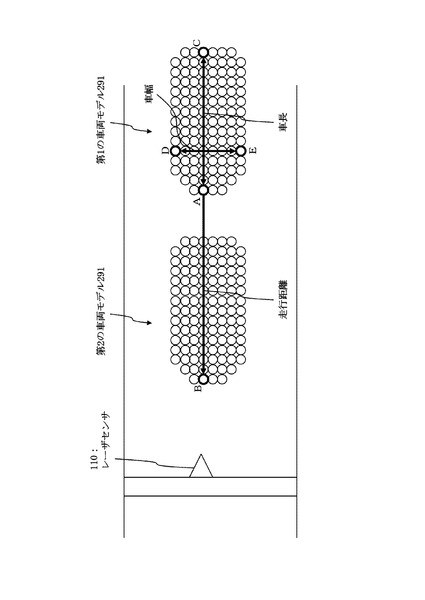
図5は、実施の形態1における2つの車両モデル291を表示した平面図である。
車両モデル291に含まれる座標点データ毎に座標点データが示す走行車両の座標値に基づいて点(図中の丸印)を表示すると、図5に示すように走行車両の走行位置が分かる。
【0060】
例えば、速度算出部250は、以下のように走行車両の走行速度を算出する。
速度算出部250は、第1の車両モデル291と第2の車両モデル291とのそれぞれからレーザセンサ110の座標値に最も近い座標値を示す座標点データ(図中の丸印A、B)を走行車両の先頭部分に対応する座標点データとして抽出する。そして、速度算出部250は、第1の車両モデル291から抽出した座標点データ(丸印A)が示す座標値と第2の車両モデル291から抽出した座標点データ(丸印B)が示す座標値との距離を走行車両の走行距離として算出する。
また、速度算出部250は、第1の車両モデル291を生成する際に使用された第1の観測データ119と第2の車両モデル291を生成する際に使用された第2の観測データ119とを速度算出記憶部290から取得する。そして、速度算出部250は、第1の観測データ119が示すレーザスキャン処理の処理時刻と第2の観測データ119が示すレーザスキャンの処理時刻との時刻差を走行車両の走行時間として算出する。
さらに、速度算出部250は、走行車両の走行距離を走行車両の走行時間で除算して走行車両の走行速度を算出する。
【0061】
但し、速度算出部250は、3つ以上の車両モデル291に基づいて走行車両の走行速度を算出してもよい。
例えば、速度算出部250は、第1の車両モデル291と第2の車両モデル291とに基づいて第1の走行速度を算出し、第1の車両モデル291(または第2の車両モデル291)と第3の車両モデル291とに基づいて第2の走行速度を算出し、第1の走行速度と第2の走行速度との平均値を走行車両の走行速度として算出する。
【0062】
図4に戻り、安全速度警報方法の処理の説明を続ける。
【0063】
S140の後、S150に進む。
【0064】
S150において、車種判定部260は、一つまたは複数の車両モデル291を取得し、取得した車両モデル291に基づいて走行車両の大きさ(例えば、車幅)を算出し、算出した走行車両の大きさに対応する車種を車両モデル291に記憶された車種データ292から取得する。
【0065】
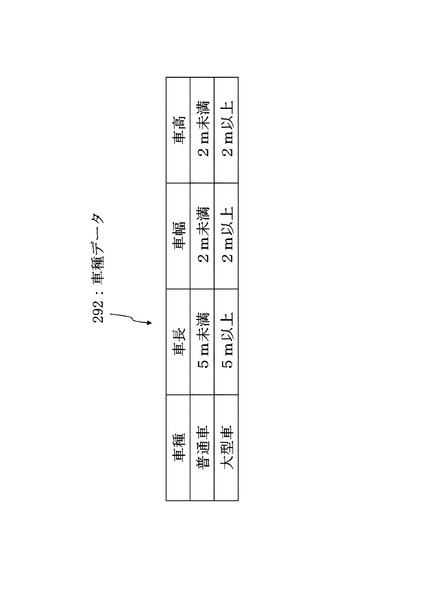
図6は、実施の形態1における車種データ292を示すデータである。
図6に示すように、車種データ292は、車種(普通車、大型車)と車両の大きさ(車長、車幅、車高)の範囲とを対応付けたデータである。
【0066】
図5に示すように、車両モデル291に含まれる座標点データ毎に点(図中の丸印)を表示すると、走行車両の大きさ(例えば、車幅)が分かる。
【0067】
例えば、車種判定部260は、第1の車両モデル291(または第2の車両モデル291)から走行車両の長さ方向で最も離れた座標値を示す2つの座標点データ(図5中の丸印A、C)を抽出する。そして、速度算出部250は、抽出した2つの座標点データが示す2つの座標値に基づいて走行車両の長さ方向の長さを走行車両の車長として算出する。
そして、車種判定部260は、走行車両の車長に対応する車種を車種データ292(図6参照)から取得する。
【0068】
また、車種判定部260は、第1の車両モデル291(または第2の車両モデル291)から走行車両の幅方向で最も離れた座標値を示す2つの座標点データ(図5中の丸印D、E)を抽出してもよい。この場合、車種判定部260は、抽出した2つの座標点データが示す2つの座標値に基づいて走行車両の幅方向の長さを走行車両の車幅として算出する。そして、車種判定部260は、走行車両の車幅に対応する車種を車種データ292から取得する。
【0069】
また、車種判定部260は、第1の車両モデル291(または第2の車両モデル291)から最も低い(または最も高い)座標値を示す座標点データを抽出し、抽出した座標点データが示す高さと路面の高さとの差を走行車両の車高として算出してもよい。この場合、車種判定部260は、走行車両の車高に対応する車種を車種データ292から取得する。路面の高さは速度算出記憶部290に予め記憶しておく。
【0070】
さらに、車種判定部260は、複数の車両モデル291に基づいて複数の車幅(または車長や車高)を算出し、算出した車幅(または車長や車高)の平均値を算出し、算出した平均値に対応する車種を車種データ292から取得してもよい。
【0071】
図4に戻り、安全速度警報方法の処理の説明を続ける。
【0072】
S150の後、S160に進む。
【0073】
S160において、速度情報出力部270は、速度算出部250により算出された走行速度と車種判定部260により判定された車種と路面状態判定部230により判定された路面状態とを含んだデータを走行車両の走行データ299として生成する。
そして、速度情報出力部270は、生成した走行データ299を路側処理装置300に送信する。
【0074】
S160において、路側処理装置300の速度データ入力部310は、レーザセンサ処理装置200から送信された走行車両の走行データ299を受信し、受信した走行車両の走行データ299を速度判定記憶部390に記憶する。
【0075】
S160において、安全速度取得部320は、走行車両の走行データ299を速度判定記憶部390から取得し、取得した走行車両の走行データ299が示す車種と路面状態とに対応する安全速度を安全速度データ391から取得する。
【0076】
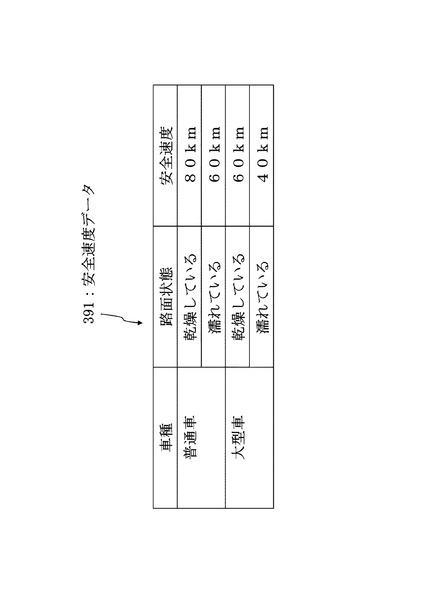
図7は、実施の形態1における安全速度データ391を示す図である。
図7に示すように、安全速度データ391は、車種と路面状態と安全速度とを対応付けたデータである。
普通車両より大型車両の方がブレーキをかけてから停止するまでの制動距離が長いため、普通車両の安全速度より遅い速度を大型車両の安全速度として安全速度データ391に定義している。
また、路面が濡れている場合、制動距離が長くなるため、路面が乾燥している場合の安全速度より遅い速度を路面が乾燥している場合の安全速度として安全速度データ391に定義している。
【0077】
S160(図4参照)の後、S170に進む。
【0078】
S170において、速度判定部330は、速度判定記憶部390から走行データ299を取得し、取得した走行データ299が示す走行車両の走行速度と安全速度取得部320が取得した安全速度とを比較する。
走行車両の走行速度が安全速度を超えている場合(YES)、S180に進む。
走行車両の走行速度が安全速度を超えていない場合(NO)、S110に戻る。
【0079】
S180において、通報指示部340は警報指示を路側表示板120に送信する。
そして、警報指示を受けた路側表示板120は、走行車両の運転手に対して危険速度で走行しているから速度を落とすように促す警報メッセージを電光掲示板(表示部)に点灯表示する。例えば、警報メッセージは路側表示板120に予め記憶しておく。但し、路側処理装置300が警報メッセージを生成し、生成した警報メッセージを路側表示板120へ送信しても構わない。
路側表示板120は、一定時間が経過したときに警報メッセージを表示した電光掲示板を消灯する。但し、レーザセンサ処理装置200の車両検出部220により走行車両が存在しない、つまり、走行車両がスキャン領域を通過したと判定されたときに、レーザセンサ処理装置200から路側処理装置300を介して路側表示板120へ警報停止指示を送信してもよい。この場合、路側表示板120は、警報メッセージを表示した電光掲示板を警報停止指示を受けたときに消灯する。
【0080】
また、通報指示部340は警報指示をDSRC無線装置130に送信する。
警報指示を受けたDSRC無線装置130は、DSRC無線を用いて走行車両の車載器191と通信し、走行車両の車載器191に警報要求を送信する。
そして、警報要求を受けた走行車両の車載器191は、カーナビ192などを用いて警報メッセージを画面表示または音声出力する。例えば、警報メッセージは車載器191に予め記憶しておく。但し、路側処理装置300またはDSRC無線装置130が警報メッセージを生成し、生成した警報メッセージをDSRC無線装置130を介して車載器191へ送信しても構わない。
車載器191は、所定の出力時間が経過したときに警報メッセージの出力を停止する。
【0081】
S180により、安全速度警報方法の処理は終了する。但し、安全速度警報方法の処理は繰り返し実行される。
【0082】
上記の安全速度警報方法では、車種と路面状態とに対応する安全速度と走行車両の走行速度とを比較したが(S160、S170)、車種と路面状態とに対応する危険速度と走行車両の走行速度とを比較しても構わない。この場合、車種と路面状態と危険速度とを対応付けた危険速度データを安全速度データ391の代わりに用い、走行車両の走行速度が危険速度に達しているか否かを判定する(S170)。
また、車種と路面状態とに対応する安全速度(または危険速度)と走行車両の走行速度とを比較(S150、S160)する代わりに、車種または路面状態に対応する安全速度(または危険速度)と走行車両の走行速度とを比較しても構わない。
【0083】
実施の形態1において、レーザセンサ110がレーザセンサ処理装置200の機能構成(図2参照)の一部または全部を備えても構わない。
また、路側処理装置300がレーザセンサ処理装置200の機能構成の一部または全部を備えても構わない。
【0084】
実施の形態1における安全速度警報システム100は、上記の通り、レーザセンサ110を用いて車両の速度、車両の車種および路面の状態を検出する。
つまり、車両の速度、車両の形状および路面の状態を検出するために複数のセンサを必要とせず、システム構成を簡略化することができる。
また、DSRC通信をしなくても車両の速度および車種を検出することができるため、DSRC通信用の車載器を搭載していない車両の運転者に対しても路側表示板を用いて減速を促すことができる。
【0085】
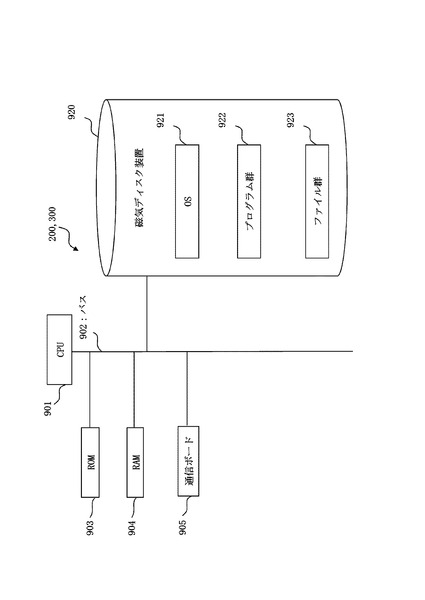
図8は、実施の形態1におけるレーザセンサ処理装置200および路側処理装置300のハードウェア資源の一例を示す図である。
図8において、レーザセンサ処理装置200および路側処理装置300は、CPU901(Central Processing Unit)を備えている。CPU901は、バス902を介してROM903、RAM904、通信ボード905、磁気ディスク装置920(またはその他の補助記憶装置)と接続され、これらのハードウェアデバイスを制御する。
【0086】
通信ボード905は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0087】
磁気ディスク装置920には、OS921(オペレーティングシステム)、プログラム群922、ファイル群923が記憶されている。
【0088】
プログラム群922には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU901により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0089】
ファイル群923には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0090】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0091】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0092】
実施の形態2.
レーザセンサの代わりにステレオカメラを用いる形態について説明する。
以下、実施の形態1と異なる事項について主に説明する。説明を省略する事項については実施の形態1と同様である。
【0093】
図9は、実施の形態2における安全速度警報システム100の構成図である。
図9に示すように、安全速度警報システム100は、実施の形態1で説明したレーザセンサ110(図1参照)の代わりにステレオカメラ140A・Bを備え、レーザセンサ処理装置200の代わりにステレオカメラ処理装置201を備える。
【0094】
ステレオカメラ140A・Bは、道路の所定の撮像領域(図中の網掛け部分)を異なる位置から撮像することにより、道路を走行する車両190または道路の路面を撮像した2つの画像をステレオ画像として生成する。
ステレオカメラ140A・Bは一台の装置として構成されても構わない。
【0095】
ステレオカメラ処理装置201(速度算出装置の一例)は、ステレオカメラ140により生成された異なる時刻の複数のステレオ画像に基づいて走行車両の異なる時刻間の走行距離を算出し、算出した走行距離に基づいて走行車両の走行速度を算出する。
また、ステレオカメラ処理装置201は、ステレオカメラ140により生成された少なくともいずれかのステレオ画像に基づいて、走行車両の車種を判定する。
また、ステレオカメラ処理装置201は、ステレオカメラ140により生成された少なくともいずれかのステレオ画像(路面画像の一例)に基づいて道路の路面状態を判定する。
【0096】
路側処理装置300は、ステレオカメラ処理装置201により判定された走行車両の車種と道路の路面状態とに基づいて、ステレオカメラ処理装置201により算出された走行車両の走行速度が走行車両の車種と道路の路面状態とに対応する所定速度を超えているか否かを判定する。
【0097】
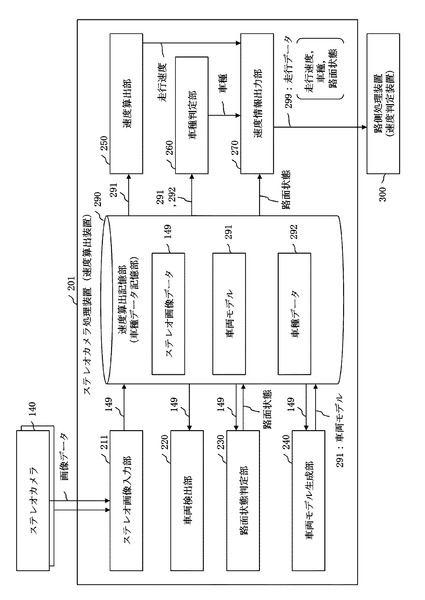
図10は、実施の形態2におけるステレオカメラ処理装置201の機能構成図である。
実施の形態2におけるステレオカメラ処理装置201の機能構成について、図10に基づいて説明する。
【0098】
ステレオカメラ処理装置201は、実施の形態1のレーザセンサ処理装置200(図2参照)が備える観測データ入力部210の代わりに、ステレオ画像入力部211を備える。
また、ステレオカメラ処理装置201は、実施の形態1のレーザセンサ処理装置200と同様に、路面状態判定部230、車両検出部220、車両モデル生成部240、速度算出部250、車種判定部260、速度情報出力部270および速度算出記憶部290を備える。
【0099】
ステレオ画像入力部211は、ステレオカメラ140Aにより生成された画像データとステレオカメラ140Bにより生成された画像データとを一組のステレオ画像データ149として入力する。
【0100】
ステレオ画像データ149は、道路の所定の撮像領域を異なる位置から撮像した二つ一組の画像データである。
【0101】
路面状態判定部230は、ステレオ画像データ149に基づいて道路の路面状態を判定する。
【0102】
車両検出部220は、ステレオ画像データ149に基づいて走行車両の有無を判定する。
【0103】
車両モデル生成部240は、ステレオ画像データ149に基づいて車両モデル291を生成する。
【0104】
ステレオカメラ処理装置201のその他の機能構成は、実施の形態1で説明したレーザセンサ処理装置200の機能構成(図2参照)と同様である。
【0105】
路側処理装置300の機能構成は実施の形態1(図3参照)と同じである。
【0106】
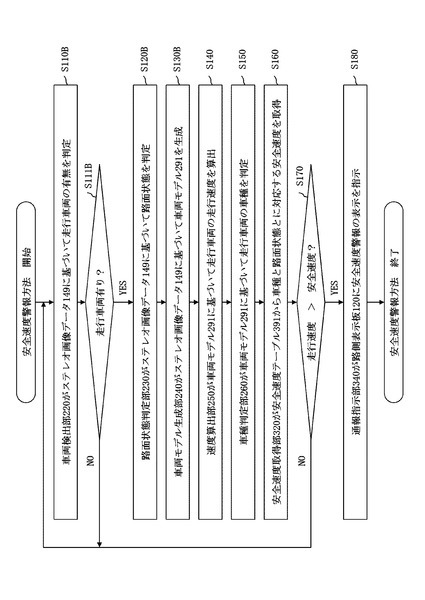
図11は、実施の形態2における安全速度警報システム100の安全速度警報方法を示すフローチャートである。
実施の形態2における安全速度警報方法の処理の流れについて、図11に基づいて説明する。
【0107】
安全速度警報方法の処理のうちS140以降の処理は実施の形態1(図4参照)と同様である。
以下、S110BからS140Bの処理について説明する。
【0108】
S110Bにおいて、ステレオカメラ140A・Bは、同期して撮像処理を繰り返し、撮像処理毎に画像データを生成し、生成した画像データをレーザセンサ処理装置200へ出力する。
画像データは、画素毎に画像に写った路面または走行車両の色を表す画素値(例えば、RGB値や輝度値)を含んだデータである。以下、画素値を示すデータを画素データという。つまり、画像データは、複数の画素データを含んだ画素群データである。
さらに、画像データは、撮像処理の処理時刻を含む。ステレオカメラ140Aにより生成される画像データの処理時刻とステレオカメラ140Bにより生成される画像データの処理時刻は同じ時刻である。
【0109】
S110Bにおいて、レーザセンサ処理装置200のステレオ画像入力部211は、ステレオカメラ140Aから出力された画像データとステレオカメラ140Bから出力された画像データとを入力し、入力した二つの画像データを含んだデータをステレオ画像データ149として速度算出記憶部290に記憶する。
【0110】
S110Bにおいて、車両検出部220は、速度算出記憶部290からステレオ画像データ149を取得し、取得したステレオ画像データ149に基づいて走行車両の有無を判定する。
【0111】
例えば、車両検出部220は、ステレオ画像データ149に含まれる2つの画像データをステレオ視(立体視)して各画像データに立体物(走行車両)が映っているか否かを判定し、各画像データに立体物が映っている場合に走行車両が存在すると判定する。
【0112】
ステレオ視とは、2枚の画像の視差に基づいて三角測量を行い、画像内の画素に写っている部分(例えば、路面または走行車両)の三次元座標値を算出する画像処理である。
例えば、ステレオ視では、2枚の画像に基づいて三次元座標値を画素毎に示す三次元画像データが生成される。
【0113】
また、車両検出部220は、ステレオ画像データ149に含まれる画像データと走行車両が走行していないときに撮像された道路の画像データとをパターンマッチングしてもよい。この場合、車両検出部220は、ステレオ画像データ149に含まれる画像データと道路の画像データとが一致しなければ、走行車両が存在すると判定する。
【0114】
S110Bの後、S111Bに進む。
【0115】
S111Bにおいて、走行車両が存在すると判定された場合(YES)、S120Bに進む。
走行車両が存在しないと判定された場合(NO)、S110Bに戻る。
【0116】
S120Bにおいて、路面状態判定部230は、速度算出記憶部290からステレオ画像データ149を取得し、取得したステレオ画像データ149に示される画素値に基づいて道路の路面状態を判定する。
路面が乾燥している場合、路面を写した画像の画素値はグレーに近い値となり、路面が濡れている場合、路面を写した画像の画素値は路面が乾燥しているときと比べて黒に近い値となる。
【0117】
例えば、路面状態判定部230は、以下のように路面状態を判定する。
路面状態判定部230は、ステレオ画像データ149に含まれる片方または両方の画像データから車両検出部220により検出された立体物(走行車両)の画素データ以外の複数の画素データを抽出する。抽出した複数の画素データは路面を写した画素データである。
路面状態判定部230は、抽出した複数の画素データに基づいて画素値の平均値を路面の画素値として算出し、算出した路面の画素値を乾燥時の路面の画素値の範囲を示した所定の乾燥時範囲と比較する。
そして、路面状態判定部230は、路面の画素値が乾燥時範囲の値であれば路面が乾燥していると判定し、路面の画素値が乾燥時範囲以外の値であれば路面が濡れていると判定する。
【0118】
但し、路面状態判定部230は、抽出した複数の画素データから所定数の画素データをランダムに選択し、選択した所定数の画素データに基づいて画素値の平均値を路面の画素値として算出しても構わない。
【0119】
また、路面状態判定部230は、路面の画素値を濡れているときの路面の画素値の範囲を示した所定の湿潤時範囲と比較しても構わない。この場合、路面状態判定部230は、路面の画素値が湿潤時範囲以外の値であれば路面が乾燥していると判定し、路面の画素値が湿潤時範囲の値であれば路面が濡れていると判定する。
【0120】
また、3種類以上の路面状態(例えば、乾燥状態、湿っている状態、濡れている状態、水が浮いている状態)に対応付けて画素値の範囲を設定した路面判定テーブルを予め速度算出記憶部290に記憶しても構わない。この場合、路面状態判定部230は、路面判定テーブルを参照して路面の画素値を含む画素値の範囲を判定し、判定した画素値の範囲に対応する路面状態を路面判定テーブルから取得する。
【0121】
また、路面状態判定部230は、車両検出部220により走行車両が存在しないと判定された場合に、判定に用いられたステレオ画像データ149に基づいて道路の路面状態を判定しても構わない。
【0122】
S120Bの後、S130Bに進む。
【0123】
S130Bにおいて、車両モデル生成部240は、速度算出記憶部290から複数のステレオ画像データ149を取得し、取得した複数のステレオ画像データ149に基づいて複数の車両モデル291を生成する。また、車両モデル生成部240は、生成した複数の車両モデル291を速度算出記憶部290に記憶する。
例えば、車両モデル生成部240は、車両検出部220により検出された立体物(走行車両)の三次元座標値を画素毎に示す画像データを車両モデル291として生成する。
例えば、車両モデル生成部240は、車両検出部220が走行車両の有無の判定(S110B)に用いたステレオ画像データ149と、そのステレオ画像データ149の次に生成されたステレオ画像データ149とに基づいて2つの車両モデル291を生成する。
【0124】
S130Bの後、S140に進む。
【0125】
S140以降の処理は実施の形態1(図4参照)と同様である。
【0126】
実施の形態2において、ステレオカメラ140がステレオカメラ処理装置201の機能構成(図10参照)の一部または全部を備えても構わない。
また、路側処理装置300がステレオカメラ処理装置201の機能構成の一部または全部を備えても構わない。
【0127】
実施の形態2における安全速度警報システム100は、ステレオカメラ140を用いて車両の速度、車両の車種および路面の状態を検出する。
つまり、車両の速度、車両の形状および路面の状態を検出するために複数のセンサを必要とせず、システム構成を簡略化することができる。
また、DSRC通信をしなくても車両の速度および車種を検出することができるため、DSRC通信用の車載器を搭載していない車両の運転者に対しても路側表示板を用いて減速を促すことができる。
【符号の説明】
【0128】
100 安全速度警報システム、110 レーザセンサ、119 観測データ、120 路側表示板、130 DSRC無線装置、190 車両、191 車載器、192 カーナビ、200 レーザセンサ処理装置、210 観測データ入力部、220 車両検出部、230 路面状態判定部、240 車両モデル生成部、250 速度算出部、260 車種判定部、270 速度情報出力部、290 速度算出記憶部、291 車両モデル、292 車種データ、299 走行データ、300 路側処理装置、310 速度データ入力部、320 安全速度取得部、330 速度判定部、340 通報指示部、390 速度判定記憶部、391 安全速度データ、901 CPU、902 バス、903 ROM、904 RAM、905 通信ボード、920 磁気ディスク装置、921 OS、922 プログラム群、923 ファイル群。
【技術分野】
【0001】
本発明は、例えば、運転支援システム、運転システムの運転支援方法、速度算出装置および速度算出プログラムに関するものである。
【背景技術】
【0002】
図12は、従来の安全速度警報システムを示す概要図である。
図12に示すように、従来の安全速度警報システムでは、速度を計測するためにDSRC(Dedicated Short Range Communication)通信で車載器のLID(リンクID)を取得するアンテナを前後2箇所に配置する。
そして、その2点間の距離と通信した時刻とに基づいて通行車両の速度を計測していた。
さらに、路面の状態を計測するための路面センサを配置し、路面が乾燥状態か湿潤状態かを判断していた。
そして、収集した通行車両の速度や路面の状態に基づいて通行車両が速度を出し過ぎているか否かを判定し、路側表示機やDSRC無線設備で運転者に注意を促していた。
【0003】
つまり、従来の安全速度警報システムでは、速度計測のためのセンサ(DSRC無線設備)と路面状態を判定するための路面センサとを用いる必要がある。
また、通行車両にDSRC通信を行う車載器が搭載されていない場合、通行車両の速度を計測することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−46699号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、例えば、DSRC通信を行わなくても、速度を出している通行車両の運転者に注意を促すことができるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の運転支援システムは、
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサと、
前記レーザセンサにより観測された観測結果に基づいて前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成し、生成した複数の車両モデルが表す複数の走行位置に基づいて前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出装置と、
前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定する速度判定装置と、
前記速度判定装置により前記走行車両の走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する路側表示装置とを備える。
【発明の効果】
【0007】
本発明によれば、例えば、速度検出のためのDSRC通信や路面センサを別々に装置を配置しなくても、速度を出している通行車両の運転者に注意を促すことができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1における安全速度警報システム100の概要図。
【図2】実施の形態1におけるレーザセンサ処理装置200の機能構成図。
【図3】実施の形態1における路側処理装置300の機能構成図。
【図4】実施の形態1における安全速度警報システム100の安全速度警報方法を示すフローチャート。
【図5】実施の形態1における2つの車両モデル291を表示した平面図。
【図6】実施の形態1における車種データ292を示すデータ。
【図7】実施の形態1における安全速度データ391を示す図。
【図8】実施の形態1におけるレーザセンサ処理装置200および路側処理装置300のハードウェア資源の一例を示す図。
【図9】実施の形態2における安全速度警報システム100の構成図。
【図10】実施の形態2におけるステレオカメラ処理装置201の機能構成図。
【図11】実施の形態2における安全速度警報システム100の安全速度警報方法を示すフローチャート。
【図12】従来の安全速度警報システムを示す概要図。
【発明を実施するための形態】
【0009】
実施の形態1.
図1は、実施の形態1における安全速度警報システム100の概要図である。
実施の形態1における安全速度警報システム100の概要について、図1に基づいて説明する。
【0010】
安全速度警報システム100(運転支援システムの一例)は、レーザセンサ110、レーザセンサ処理装置200、路側処理装置300、路側表示板120およびDSRC無線装置130を備える。
【0011】
レーザセンサ110は道路に設置される。例えば、レーザセンサ110は高速道路に設けられた門構え(ゲート)の上部に車両190と対面する向きで設置される。レーザセンサ110は道路脇(路肩)に設けた柱(ポール)の上部に設置しても構わない。
レーザセンサ110は、道路の所定のスキャン領域(図中の網掛け部分)を対象にして道路を走行する車両190または道路の路面をレーザ光を用いて観測する。
【0012】
レーザセンサ処理装置200(速度算出装置の一例)は、レーザセンサ110により観測された観測結果に基づいて、車両190の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する。
レーザセンサ処理装置200は、生成した複数の車両モデルが表す複数の走行位置に基づいて、異なる時刻間の車両190の走行距離を算出する。
レーザセンサ処理装置200は、算出した車両190の走行距離に基づいて車両190の走行速度を算出する。
レーザセンサ処理装置200は、生成した少なくともいずれかの車両モデルが表す車両190の車両形状に基づいて車両190の車種を判定する。
レーザセンサ処理装置200は、レーザセンサ110により観測された路面の観測結果に基づいて道路の路面状態を判定する。
【0013】
路側処理装置300(速度判定装置の一例)は、レーザセンサ処理装置200により算出された車両190の走行速度が所定速度を超えているか否かを判定する。
【0014】
例えば、路側処理装置300は以下のような判定を行う。
路側処理装置300は、レーザセンサ処理装置200により判定された車両190の車種に基づいて、車両190の走行速度が車両190の車種に対応する所定速度を超えているか否かを判定する。
路側処理装置300は、レーザセンサ処理装置200により判定された道路の路面形状に基づいて、車両190の走行速度が車両190の車種と道路の路面状態とに対応する所定速度を超えているか否かを判定する。
【0015】
路側表示板120(路側表示装置の一例)は、路側処理装置300により車両190の走行速度が所定速度を超えていると判定された場合、減速を促す所定メッセージを表示する。
【0016】
DSRC無線装置130は、路側処理装置300により車両190の走行速度が所定速度を超えていると判定された場合、車両190の走行速度が所定速度を超えていることを車両190の車載器に通知する。
車両190の車載器は、DSRC無線装置130から通知を受けた場合、カーナビゲーションシステムなどを用いて減速を促す所定メッセージを出力する。
【0017】
図2は、実施の形態1におけるレーザセンサ処理装置200の機能構成図である。
実施の形態1におけるレーザセンサ処理装置200の機能構成について、図2に基づいて説明する。
【0018】
レーザセンサ処理装置200(速度算出装置の一例)は、観測データ入力部210、路面状態判定部230、車両検出部220、車両モデル生成部240、速度算出部250、車種判定部260、速度情報出力部270および速度算出記憶部290を備える。
【0019】
観測データ入力部210は、レーザセンサ110が観測して得た観測結果を観測データ119として入力する。
【0020】
レーザセンサ110は、道路の所定のスキャン領域に向けて複数のレーザ光を照射し、スキャン領域で反射して戻ってきた複数のレーザ光を複数の反射光として検出し、検出した反射光毎にレーザ光を照射してから反射光を検出するまでの時間を反射光の遅延時間として計測する。また、レーザセンサ110は、検出した反射光毎に反射光の強度(信号強度、電圧強度)を計測する。
観測データ119は、検出された反射光毎に反射光の遅延時間と反射光の強度とレーザ光の照射方向とを対応付けて示すデータである。
【0021】
車両検出部220は、第1の観測データ119が示す少なくともいずれかの遅延時間に基づいて、スキャン領域を車両が走行しているか否かを判定する。
【0022】
路面状態判定部230は、特定の観測データ119が示す少なくともいずれかの反射光の強度に基づいて、道路の路面が乾燥しているか否かを路面状態として判定する。
【0023】
車両モデル生成部240は、車両検出部220によりスキャン領域を車両が走行していると判定された場合、第1の観測データ119が示す複数の遅延時間に基づいて第1の車両モデル291を生成し、第2の観測データ119が示す複数の遅延時間に基づいて第2の車両モデル291を生成する。
車両モデル291は、スキャン領域を走行している走行車両の車両形状(大きさを含む)と走行車両の走行位置とを表すデータである。
【0024】
速度算出部250は、第1の車両モデル291が表す走行位置から第2の車両モデル291が表す走行位置までの距離を走行車両の走行距離として算出する。
速度算出部250は、第1の計測時(第1の観測データ119を得るための観測時)から第2の計測時(第2の観測データ119を得るための観測時)までの時間を走行車両の走行時間として算出する。
速度算出部250は、算出した走行時間と走行距離とに基づいて走行車両の走行速度を算出する。
【0025】
車種判定部260は、第1の車両モデル291と第2の車両モデル291との少なくともいずれかが表す走行車両の大きさと車種データ292とに基づいて走行車両の車種を判定する。
車種データ292は、車種と車両の大きさとを対応付けたデータである。
【0026】
速度情報出力部270は、速度算出部250により算出された走行車両の走行速度と車種判定部260により判定された走行車両の車種と路面状態判定部230により判定された道路の路面状態とを含む走行データ299を路側処理装置300に出力する。
【0027】
速度算出記憶部290は、レーザセンサ処理装置200で使用するデータを記憶する。
車両モデル291、車種データ292および走行データ299は、速度算出記憶部290に記憶されるデータの一例である。
【0028】
図3は、実施の形態1における路側処理装置300の機能構成図である。
実施の形態1における路側処理装置300の機能構成について、図3に基づいて説明する。
【0029】
路側処理装置300(速度判定装置の一例)は、速度データ入力部310、安全速度取得部320、速度判定部330、通報指示部340および速度判定記憶部390を備える。
【0030】
速度データ入力部310は、レーザセンサ処理装置200により生成された走行データ299を入力する。
走行データ299は、走行車両の走行速度と走行車両の車種と道路の路面状態とを示すデータである。
【0031】
安全速度取得部320は、走行データ299が示す走行車両の車種と道路の路面状態とに対応する安全速度を安全速度データ391から取得する。
安全速度データ391は、車種と路面状態と安全速度とを対応付けたデータである。
【0032】
速度判定部330は、走行データ299が示す走行車両の走行速度と安全速度取得部320により取得された安全速度とを比較し、走行車両の走行速度が安全速度を超えているか否かを判定する。
【0033】
通報指示部340は、速度判定部330により走行車両の走行速度が安全速度を超えていると判定された場合、路側表示板120とDSRC無線装置130とに警報指示を出力する。
【0034】
速度判定記憶部390(安全速度データ記憶部の一例)は、路側処理装置300で使用するデータを記憶する。
安全速度データ391や走行データ299は、速度判定記憶部390に記憶するデータの一例である。
【0035】
路側表示板120(路側表示装置の一例)は、レーザセンサ110から走行車両の進行方向に特定距離だけ離れた位置に設置される装置である。
路側表示板120は、路側処理装置300から警報指示を受けた場合、減速を促す所定のメッセージを表示する。
【0036】
DSRC無線装置130は、レーザセンサ110の近くに設置される装置である。
DSRC無線装置130は、路側処理装置300から警報指示を受けた場合、走行車両(車両190)の車載器191に走行速度が安全速度を超えていることを通知する。
車載器191は、DSRC無線装置130から通知を受けた場合、カーナビゲーションシステム(以下、カーナビ192)などを用いて、減速を促す所定のメッセージを出力する。
【0037】
図4は、実施の形態1における安全速度警報システム100の安全速度警報方法を示すフローチャートである。
実施の形態1における安全速度警報方法の処理の流れについて、図4に基づいて説明する。
【0038】
まず、安全速度警報方法(運転支援方法の一例)の処理の概要について説明する。
【0039】
車両検出部220は、レーザセンサ110の観測データ119に基づいて走行車両の有無を判定する(S110:車両検出処理)。
走行車両が存在する場合(S111「YES」)、路面状態判定部230は、レーザセンサ110の観測データ119に基づいて路面状態を判定する(S120:路面状態判定処理)。
車両モデル生成部240は、レーザセンサ110の観測データ119に基づいて車両モデル291を生成する(S130:車両モデル生成処理)。
速度算出部250は、車両モデル291に基づいて走行車両の走行速度を算出する(S140:走行速度算出処理)。
車種判定部260は、車両モデル291に基づいて走行車両の車種を判定する(S150:車種判定処理)。
安全速度取得部320は、安全速度データ391から車種と路面状態とに対応する安全速度を取得する(S160:安全速度取得処理)。
速度判定部330は、走行車両の走行速度と安全速度とを比較する(S170:走行速度判定処理)。
走行車両の走行速度が安全速度を超えている場合(S170「YES」)、通報指示部340は、路側表示板120に安全速度警報の表示を指示する(S180:メッセージ表示処理)。
【0040】
次に、安全速度警報方法の処理の詳細について説明する。
【0041】
S110において、レーザセンサ110は、道路の長さ方向と道路の幅方向とにポリゴンミラーなどを回転させながら道路の所定のスキャン領域に向けて複数のレーザ光を照射する。そして、レーザセンサ110は、スキャン領域から戻ってきた複数の反射光を検出し、検出した反射光毎にレーザ光を照射してから反射光を検出するまでの時間(反射光の遅延時間)と反射光の強度とを計測する。以下、この一連の処理のことを「レーザスキャン処理」という。
レーザセンサ110は、レーザスキャン処理を繰り返し、レーザスキャン処理毎に観測データ119を生成し、生成した観測データ119をレーザセンサ処理装置200へ出力する。
観測データ119は、1回のレーザスキャン処理で得られるデータであり、検出された反射光毎に反射光の遅延時間と反射光の強度とレーザ光の照射方向とを対応付けたレーザ点データを含んだデータである。つまり、観測データ119は、複数のレーザ点データを含んだレーザ点群データである。
さらに、観測データ119は、レーザスキャン処理の処理時刻(例えば、レーザスキャン処理の開始時刻)を含む。
【0042】
S110において、レーザセンサ処理装置200の観測データ入力部210は、レーザセンサ110から出力された観測データ119を入力し、入力した観測データ119を速度算出記憶部290に記憶する。
【0043】
S110において、車両検出部220は、速度算出記憶部290から観測データ119を取得し、取得した観測データ119に基づいて走行車両の有無を判定する。
走行車両が存在しない場合にはレーザセンサ110から照射されたレーザ光は路面で反射し、走行車両が存在する場合、レーザセンサ110から照射されたレーザ光は走行車両で反射する。このため、走行車両で反射した反射光の遅延時間は、路面で反射した反射光の遅延時間に比べて、走行車両の高さ分だけ短い時間になる。
【0044】
例えば、車両検出部220は、以下のように走行車両の有無を判定する。
車両検出部220は、観測データ119に示される複数の反射光の遅延時間のうち所定の車両判定時間より短い反射光の遅延時間の数を短時間遅延数として算出し、算出した短時間遅延数を所定の車両判定数と比較する。
そして、車両検出部220は、短時間遅延数が車両判定数より多い場合に車両が存在すると判定し、短時間遅延数が車両判定数以下の場合に車両が存在しないと判定する。
【0045】
但し、レーザ光の照射方向によってレーザセンサ110と路面との距離は異なるため、レーザ光の照射方向と車両判定時間とを対応付けた車両判定時間テーブルを速度算出記憶部290に予め記憶してもよい。
この場合、車両検出部220は、観測データ119に含まれるレーザ点データ毎にレーザ点データが示すレーザ光の照射方向に対応する車両判定時間を車両判定時間テーブルから取得する。
そして、車両検出部220は、レーザ点データ毎にレーザ点データが示す反射光の遅延時間と車両判定時間テーブルから取得した車両判定時間とを比較する。
【0046】
S110の処理は、S111以降の処理中にも繰り返し実行する。但し、S110の処理のうち、レーザセンサ110の処理および観測データ入力部210の処理をS120以降の処理中に繰り返し実行しても構わない。つまり、車両検出部220の処理をS120以降の処理中に実行しなくても構わない。
【0047】
S110の後、S111に進む。
【0048】
S111において、走行車両が存在すると判定された場合(YES)、S120に進む。
走行車両が存在しないと判定された場合(NO)、S110に戻る。
【0049】
S120において、路面状態判定部230は、速度算出記憶部290から観測データ119を取得し、取得した観測データ119に示される反射光の強度に基づいて道路の路面状態を判定する。
路面状態とは、路面が観測しているか否かを示す状態のことである。路面が乾燥している場合(例えば、晴天の場合)、路面が濡れている場合(例えば、雨天の場合)に比べて、反射光の強度が強い。路面が濡れている場合、路面に水膜ができて拡散反射が少なくなるためである。
【0050】
例えば、路面状態判定部230は、以下のように路面状態を判定する。
路面状態判定部230は、観測データ119から所定の車両判定時間(S110参照)以上の反射光の遅延時間を示す複数のレーザ点データを複数の路面点データとして抽出する。路面点データは、路面で反射した反射光の遅延時間および強度を示すレーザ点データである。
路面状態判定部230は、抽出した複数の路面点データに基づいて反射光の強度の平均値を路面の反射強度として算出し、算出した路面の反射強度を所定の路面判定強度と比較する。
そして、路面状態判定部230は、路面の反射強度が路面判定強度より大きい場合に路面が乾燥していると判定し、路面の反射強度が路面判定強度以下の場合に路面が濡れていると判定する。
【0051】
但し、路面状態判定部230は、複数の路面点データから所定数の路面点データをランダムに取得し、取得した所定数の路面点データに基づいて反射光の強度の平均値を路面の反射強度として算出しても構わない。
【0052】
また、3種類以上の路面状態(例えば、乾燥している状態、濡れている状態、凍結している状態、積雪している状態)に対応付けて路面判定強度の範囲を設定した路面判定テーブルを予め速度算出記憶部290に記憶しても構わない。この場合、路面状態判定部230は、路面判定テーブルを参照して路面の反射強度を含む路面判定強度の範囲を判定し、判定した路面判定強度の範囲に対応する路面状態を路面判定テーブルから取得する。
【0053】
また、路面状態判定部230は、車両検出部220により走行車両が存在しないと判定された場合に、判定に用いられた観測データ119に基づいて道路の路面状態を判定しても構わない。
【0054】
S120の後、S130に進む。
【0055】
S130において、車両モデル生成部240は、速度算出記憶部290から複数の観測データ119を取得し、取得した複数の観測データ119に基づいて複数の車両モデル291を生成し、生成した複数の車両モデル291を速度算出記憶部290に記憶する。車両モデル291は、走行車両の車両形状(大きさを含む)と走行車両の走行位置とを表すデータである。
例えば、車両モデル生成部240は、車両検出部220が走行車両の有無の判定(S110)に用いた観測データ119と、その観測データ119の次に生成された観測データ119とに基づいて2つの車両モデル291を生成する。
【0056】
車両モデル生成部240は、例えば、以下のように車両モデル291を生成する。
車両モデル生成部240は、観測データ119から所定の車両判定時間(S110参照)より短い反射光の遅延時間を示す複数のレーザ点データを複数の対象点データとして抽出する。対象点データは、走行車両で反射した反射光の遅延時間とレーザ光の照射方向とを示すレーザ点データである。
車両モデル生成部240は、抽出した対象点データ毎に対象点データが示す反射光の遅延時間に光速度を乗算してレーザセンサ110から走行車両(レーザ光の反射地点)までの往復距離を算出する。そして、車両モデル生成部240は、算出した往復距離を半分にした距離をレーザセンサ110から走行車両までの車両距離(反射地点距離)として算出する。
そして、車両モデル生成部240は、抽出した対象点データ毎に車両距離と対象点データが示すレーザ光の照射方向とを対応付けて距離方位点データを生成し、生成した複数の距離方位点データを含んだデータを距離方位点群データとして生成する。走行車両は、レーザセンサ110からレーザ光の照射方向に車両距離だけ離れた地点に位置する。
車両モデル生成部240は、距離方位点群データに基づいて距離方位点データ毎に走行車両が位置する地点の座標値(走行車両の座標値)を算出する。このとき、車両モデル生成部240は、レーザセンサ110の座標値から距離方位点データが示すレーザ光の照射方向に距離方位点データが示す車両距離だけ離れた地点の座標値を走行車両の座標値として算出する。レーザセンサ110の座標値は、例えば、速度算出記憶部290に予め記憶しておく。
車両モデル生成部240は、距離方位点データ毎に走行車両の座標値を示す座標点データ(三次元点データ)を生成し、生成した複数の座標点データを含んだデータを車両モデル291(座標点群データ、三次元点群データ)として生成する。
【0057】
S130の後、S140に進む。
【0058】
S140において、速度算出部250は、車両モデル生成部240により生成された複数の車両モデル291を速度算出記憶部290から取得し、取得した複数の車両モデル291に基づいて走行車両の走行速度を算出する。
【0059】
図5は、実施の形態1における2つの車両モデル291を表示した平面図である。
車両モデル291に含まれる座標点データ毎に座標点データが示す走行車両の座標値に基づいて点(図中の丸印)を表示すると、図5に示すように走行車両の走行位置が分かる。
【0060】
例えば、速度算出部250は、以下のように走行車両の走行速度を算出する。
速度算出部250は、第1の車両モデル291と第2の車両モデル291とのそれぞれからレーザセンサ110の座標値に最も近い座標値を示す座標点データ(図中の丸印A、B)を走行車両の先頭部分に対応する座標点データとして抽出する。そして、速度算出部250は、第1の車両モデル291から抽出した座標点データ(丸印A)が示す座標値と第2の車両モデル291から抽出した座標点データ(丸印B)が示す座標値との距離を走行車両の走行距離として算出する。
また、速度算出部250は、第1の車両モデル291を生成する際に使用された第1の観測データ119と第2の車両モデル291を生成する際に使用された第2の観測データ119とを速度算出記憶部290から取得する。そして、速度算出部250は、第1の観測データ119が示すレーザスキャン処理の処理時刻と第2の観測データ119が示すレーザスキャンの処理時刻との時刻差を走行車両の走行時間として算出する。
さらに、速度算出部250は、走行車両の走行距離を走行車両の走行時間で除算して走行車両の走行速度を算出する。
【0061】
但し、速度算出部250は、3つ以上の車両モデル291に基づいて走行車両の走行速度を算出してもよい。
例えば、速度算出部250は、第1の車両モデル291と第2の車両モデル291とに基づいて第1の走行速度を算出し、第1の車両モデル291(または第2の車両モデル291)と第3の車両モデル291とに基づいて第2の走行速度を算出し、第1の走行速度と第2の走行速度との平均値を走行車両の走行速度として算出する。
【0062】
図4に戻り、安全速度警報方法の処理の説明を続ける。
【0063】
S140の後、S150に進む。
【0064】
S150において、車種判定部260は、一つまたは複数の車両モデル291を取得し、取得した車両モデル291に基づいて走行車両の大きさ(例えば、車幅)を算出し、算出した走行車両の大きさに対応する車種を車両モデル291に記憶された車種データ292から取得する。
【0065】
図6は、実施の形態1における車種データ292を示すデータである。
図6に示すように、車種データ292は、車種(普通車、大型車)と車両の大きさ(車長、車幅、車高)の範囲とを対応付けたデータである。
【0066】
図5に示すように、車両モデル291に含まれる座標点データ毎に点(図中の丸印)を表示すると、走行車両の大きさ(例えば、車幅)が分かる。
【0067】
例えば、車種判定部260は、第1の車両モデル291(または第2の車両モデル291)から走行車両の長さ方向で最も離れた座標値を示す2つの座標点データ(図5中の丸印A、C)を抽出する。そして、速度算出部250は、抽出した2つの座標点データが示す2つの座標値に基づいて走行車両の長さ方向の長さを走行車両の車長として算出する。
そして、車種判定部260は、走行車両の車長に対応する車種を車種データ292(図6参照)から取得する。
【0068】
また、車種判定部260は、第1の車両モデル291(または第2の車両モデル291)から走行車両の幅方向で最も離れた座標値を示す2つの座標点データ(図5中の丸印D、E)を抽出してもよい。この場合、車種判定部260は、抽出した2つの座標点データが示す2つの座標値に基づいて走行車両の幅方向の長さを走行車両の車幅として算出する。そして、車種判定部260は、走行車両の車幅に対応する車種を車種データ292から取得する。
【0069】
また、車種判定部260は、第1の車両モデル291(または第2の車両モデル291)から最も低い(または最も高い)座標値を示す座標点データを抽出し、抽出した座標点データが示す高さと路面の高さとの差を走行車両の車高として算出してもよい。この場合、車種判定部260は、走行車両の車高に対応する車種を車種データ292から取得する。路面の高さは速度算出記憶部290に予め記憶しておく。
【0070】
さらに、車種判定部260は、複数の車両モデル291に基づいて複数の車幅(または車長や車高)を算出し、算出した車幅(または車長や車高)の平均値を算出し、算出した平均値に対応する車種を車種データ292から取得してもよい。
【0071】
図4に戻り、安全速度警報方法の処理の説明を続ける。
【0072】
S150の後、S160に進む。
【0073】
S160において、速度情報出力部270は、速度算出部250により算出された走行速度と車種判定部260により判定された車種と路面状態判定部230により判定された路面状態とを含んだデータを走行車両の走行データ299として生成する。
そして、速度情報出力部270は、生成した走行データ299を路側処理装置300に送信する。
【0074】
S160において、路側処理装置300の速度データ入力部310は、レーザセンサ処理装置200から送信された走行車両の走行データ299を受信し、受信した走行車両の走行データ299を速度判定記憶部390に記憶する。
【0075】
S160において、安全速度取得部320は、走行車両の走行データ299を速度判定記憶部390から取得し、取得した走行車両の走行データ299が示す車種と路面状態とに対応する安全速度を安全速度データ391から取得する。
【0076】
図7は、実施の形態1における安全速度データ391を示す図である。
図7に示すように、安全速度データ391は、車種と路面状態と安全速度とを対応付けたデータである。
普通車両より大型車両の方がブレーキをかけてから停止するまでの制動距離が長いため、普通車両の安全速度より遅い速度を大型車両の安全速度として安全速度データ391に定義している。
また、路面が濡れている場合、制動距離が長くなるため、路面が乾燥している場合の安全速度より遅い速度を路面が乾燥している場合の安全速度として安全速度データ391に定義している。
【0077】
S160(図4参照)の後、S170に進む。
【0078】
S170において、速度判定部330は、速度判定記憶部390から走行データ299を取得し、取得した走行データ299が示す走行車両の走行速度と安全速度取得部320が取得した安全速度とを比較する。
走行車両の走行速度が安全速度を超えている場合(YES)、S180に進む。
走行車両の走行速度が安全速度を超えていない場合(NO)、S110に戻る。
【0079】
S180において、通報指示部340は警報指示を路側表示板120に送信する。
そして、警報指示を受けた路側表示板120は、走行車両の運転手に対して危険速度で走行しているから速度を落とすように促す警報メッセージを電光掲示板(表示部)に点灯表示する。例えば、警報メッセージは路側表示板120に予め記憶しておく。但し、路側処理装置300が警報メッセージを生成し、生成した警報メッセージを路側表示板120へ送信しても構わない。
路側表示板120は、一定時間が経過したときに警報メッセージを表示した電光掲示板を消灯する。但し、レーザセンサ処理装置200の車両検出部220により走行車両が存在しない、つまり、走行車両がスキャン領域を通過したと判定されたときに、レーザセンサ処理装置200から路側処理装置300を介して路側表示板120へ警報停止指示を送信してもよい。この場合、路側表示板120は、警報メッセージを表示した電光掲示板を警報停止指示を受けたときに消灯する。
【0080】
また、通報指示部340は警報指示をDSRC無線装置130に送信する。
警報指示を受けたDSRC無線装置130は、DSRC無線を用いて走行車両の車載器191と通信し、走行車両の車載器191に警報要求を送信する。
そして、警報要求を受けた走行車両の車載器191は、カーナビ192などを用いて警報メッセージを画面表示または音声出力する。例えば、警報メッセージは車載器191に予め記憶しておく。但し、路側処理装置300またはDSRC無線装置130が警報メッセージを生成し、生成した警報メッセージをDSRC無線装置130を介して車載器191へ送信しても構わない。
車載器191は、所定の出力時間が経過したときに警報メッセージの出力を停止する。
【0081】
S180により、安全速度警報方法の処理は終了する。但し、安全速度警報方法の処理は繰り返し実行される。
【0082】
上記の安全速度警報方法では、車種と路面状態とに対応する安全速度と走行車両の走行速度とを比較したが(S160、S170)、車種と路面状態とに対応する危険速度と走行車両の走行速度とを比較しても構わない。この場合、車種と路面状態と危険速度とを対応付けた危険速度データを安全速度データ391の代わりに用い、走行車両の走行速度が危険速度に達しているか否かを判定する(S170)。
また、車種と路面状態とに対応する安全速度(または危険速度)と走行車両の走行速度とを比較(S150、S160)する代わりに、車種または路面状態に対応する安全速度(または危険速度)と走行車両の走行速度とを比較しても構わない。
【0083】
実施の形態1において、レーザセンサ110がレーザセンサ処理装置200の機能構成(図2参照)の一部または全部を備えても構わない。
また、路側処理装置300がレーザセンサ処理装置200の機能構成の一部または全部を備えても構わない。
【0084】
実施の形態1における安全速度警報システム100は、上記の通り、レーザセンサ110を用いて車両の速度、車両の車種および路面の状態を検出する。
つまり、車両の速度、車両の形状および路面の状態を検出するために複数のセンサを必要とせず、システム構成を簡略化することができる。
また、DSRC通信をしなくても車両の速度および車種を検出することができるため、DSRC通信用の車載器を搭載していない車両の運転者に対しても路側表示板を用いて減速を促すことができる。
【0085】
図8は、実施の形態1におけるレーザセンサ処理装置200および路側処理装置300のハードウェア資源の一例を示す図である。
図8において、レーザセンサ処理装置200および路側処理装置300は、CPU901(Central Processing Unit)を備えている。CPU901は、バス902を介してROM903、RAM904、通信ボード905、磁気ディスク装置920(またはその他の補助記憶装置)と接続され、これらのハードウェアデバイスを制御する。
【0086】
通信ボード905は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0087】
磁気ディスク装置920には、OS921(オペレーティングシステム)、プログラム群922、ファイル群923が記憶されている。
【0088】
プログラム群922には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU901により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0089】
ファイル群923には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0090】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0091】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0092】
実施の形態2.
レーザセンサの代わりにステレオカメラを用いる形態について説明する。
以下、実施の形態1と異なる事項について主に説明する。説明を省略する事項については実施の形態1と同様である。
【0093】
図9は、実施の形態2における安全速度警報システム100の構成図である。
図9に示すように、安全速度警報システム100は、実施の形態1で説明したレーザセンサ110(図1参照)の代わりにステレオカメラ140A・Bを備え、レーザセンサ処理装置200の代わりにステレオカメラ処理装置201を備える。
【0094】
ステレオカメラ140A・Bは、道路の所定の撮像領域(図中の網掛け部分)を異なる位置から撮像することにより、道路を走行する車両190または道路の路面を撮像した2つの画像をステレオ画像として生成する。
ステレオカメラ140A・Bは一台の装置として構成されても構わない。
【0095】
ステレオカメラ処理装置201(速度算出装置の一例)は、ステレオカメラ140により生成された異なる時刻の複数のステレオ画像に基づいて走行車両の異なる時刻間の走行距離を算出し、算出した走行距離に基づいて走行車両の走行速度を算出する。
また、ステレオカメラ処理装置201は、ステレオカメラ140により生成された少なくともいずれかのステレオ画像に基づいて、走行車両の車種を判定する。
また、ステレオカメラ処理装置201は、ステレオカメラ140により生成された少なくともいずれかのステレオ画像(路面画像の一例)に基づいて道路の路面状態を判定する。
【0096】
路側処理装置300は、ステレオカメラ処理装置201により判定された走行車両の車種と道路の路面状態とに基づいて、ステレオカメラ処理装置201により算出された走行車両の走行速度が走行車両の車種と道路の路面状態とに対応する所定速度を超えているか否かを判定する。
【0097】
図10は、実施の形態2におけるステレオカメラ処理装置201の機能構成図である。
実施の形態2におけるステレオカメラ処理装置201の機能構成について、図10に基づいて説明する。
【0098】
ステレオカメラ処理装置201は、実施の形態1のレーザセンサ処理装置200(図2参照)が備える観測データ入力部210の代わりに、ステレオ画像入力部211を備える。
また、ステレオカメラ処理装置201は、実施の形態1のレーザセンサ処理装置200と同様に、路面状態判定部230、車両検出部220、車両モデル生成部240、速度算出部250、車種判定部260、速度情報出力部270および速度算出記憶部290を備える。
【0099】
ステレオ画像入力部211は、ステレオカメラ140Aにより生成された画像データとステレオカメラ140Bにより生成された画像データとを一組のステレオ画像データ149として入力する。
【0100】
ステレオ画像データ149は、道路の所定の撮像領域を異なる位置から撮像した二つ一組の画像データである。
【0101】
路面状態判定部230は、ステレオ画像データ149に基づいて道路の路面状態を判定する。
【0102】
車両検出部220は、ステレオ画像データ149に基づいて走行車両の有無を判定する。
【0103】
車両モデル生成部240は、ステレオ画像データ149に基づいて車両モデル291を生成する。
【0104】
ステレオカメラ処理装置201のその他の機能構成は、実施の形態1で説明したレーザセンサ処理装置200の機能構成(図2参照)と同様である。
【0105】
路側処理装置300の機能構成は実施の形態1(図3参照)と同じである。
【0106】
図11は、実施の形態2における安全速度警報システム100の安全速度警報方法を示すフローチャートである。
実施の形態2における安全速度警報方法の処理の流れについて、図11に基づいて説明する。
【0107】
安全速度警報方法の処理のうちS140以降の処理は実施の形態1(図4参照)と同様である。
以下、S110BからS140Bの処理について説明する。
【0108】
S110Bにおいて、ステレオカメラ140A・Bは、同期して撮像処理を繰り返し、撮像処理毎に画像データを生成し、生成した画像データをレーザセンサ処理装置200へ出力する。
画像データは、画素毎に画像に写った路面または走行車両の色を表す画素値(例えば、RGB値や輝度値)を含んだデータである。以下、画素値を示すデータを画素データという。つまり、画像データは、複数の画素データを含んだ画素群データである。
さらに、画像データは、撮像処理の処理時刻を含む。ステレオカメラ140Aにより生成される画像データの処理時刻とステレオカメラ140Bにより生成される画像データの処理時刻は同じ時刻である。
【0109】
S110Bにおいて、レーザセンサ処理装置200のステレオ画像入力部211は、ステレオカメラ140Aから出力された画像データとステレオカメラ140Bから出力された画像データとを入力し、入力した二つの画像データを含んだデータをステレオ画像データ149として速度算出記憶部290に記憶する。
【0110】
S110Bにおいて、車両検出部220は、速度算出記憶部290からステレオ画像データ149を取得し、取得したステレオ画像データ149に基づいて走行車両の有無を判定する。
【0111】
例えば、車両検出部220は、ステレオ画像データ149に含まれる2つの画像データをステレオ視(立体視)して各画像データに立体物(走行車両)が映っているか否かを判定し、各画像データに立体物が映っている場合に走行車両が存在すると判定する。
【0112】
ステレオ視とは、2枚の画像の視差に基づいて三角測量を行い、画像内の画素に写っている部分(例えば、路面または走行車両)の三次元座標値を算出する画像処理である。
例えば、ステレオ視では、2枚の画像に基づいて三次元座標値を画素毎に示す三次元画像データが生成される。
【0113】
また、車両検出部220は、ステレオ画像データ149に含まれる画像データと走行車両が走行していないときに撮像された道路の画像データとをパターンマッチングしてもよい。この場合、車両検出部220は、ステレオ画像データ149に含まれる画像データと道路の画像データとが一致しなければ、走行車両が存在すると判定する。
【0114】
S110Bの後、S111Bに進む。
【0115】
S111Bにおいて、走行車両が存在すると判定された場合(YES)、S120Bに進む。
走行車両が存在しないと判定された場合(NO)、S110Bに戻る。
【0116】
S120Bにおいて、路面状態判定部230は、速度算出記憶部290からステレオ画像データ149を取得し、取得したステレオ画像データ149に示される画素値に基づいて道路の路面状態を判定する。
路面が乾燥している場合、路面を写した画像の画素値はグレーに近い値となり、路面が濡れている場合、路面を写した画像の画素値は路面が乾燥しているときと比べて黒に近い値となる。
【0117】
例えば、路面状態判定部230は、以下のように路面状態を判定する。
路面状態判定部230は、ステレオ画像データ149に含まれる片方または両方の画像データから車両検出部220により検出された立体物(走行車両)の画素データ以外の複数の画素データを抽出する。抽出した複数の画素データは路面を写した画素データである。
路面状態判定部230は、抽出した複数の画素データに基づいて画素値の平均値を路面の画素値として算出し、算出した路面の画素値を乾燥時の路面の画素値の範囲を示した所定の乾燥時範囲と比較する。
そして、路面状態判定部230は、路面の画素値が乾燥時範囲の値であれば路面が乾燥していると判定し、路面の画素値が乾燥時範囲以外の値であれば路面が濡れていると判定する。
【0118】
但し、路面状態判定部230は、抽出した複数の画素データから所定数の画素データをランダムに選択し、選択した所定数の画素データに基づいて画素値の平均値を路面の画素値として算出しても構わない。
【0119】
また、路面状態判定部230は、路面の画素値を濡れているときの路面の画素値の範囲を示した所定の湿潤時範囲と比較しても構わない。この場合、路面状態判定部230は、路面の画素値が湿潤時範囲以外の値であれば路面が乾燥していると判定し、路面の画素値が湿潤時範囲の値であれば路面が濡れていると判定する。
【0120】
また、3種類以上の路面状態(例えば、乾燥状態、湿っている状態、濡れている状態、水が浮いている状態)に対応付けて画素値の範囲を設定した路面判定テーブルを予め速度算出記憶部290に記憶しても構わない。この場合、路面状態判定部230は、路面判定テーブルを参照して路面の画素値を含む画素値の範囲を判定し、判定した画素値の範囲に対応する路面状態を路面判定テーブルから取得する。
【0121】
また、路面状態判定部230は、車両検出部220により走行車両が存在しないと判定された場合に、判定に用いられたステレオ画像データ149に基づいて道路の路面状態を判定しても構わない。
【0122】
S120Bの後、S130Bに進む。
【0123】
S130Bにおいて、車両モデル生成部240は、速度算出記憶部290から複数のステレオ画像データ149を取得し、取得した複数のステレオ画像データ149に基づいて複数の車両モデル291を生成する。また、車両モデル生成部240は、生成した複数の車両モデル291を速度算出記憶部290に記憶する。
例えば、車両モデル生成部240は、車両検出部220により検出された立体物(走行車両)の三次元座標値を画素毎に示す画像データを車両モデル291として生成する。
例えば、車両モデル生成部240は、車両検出部220が走行車両の有無の判定(S110B)に用いたステレオ画像データ149と、そのステレオ画像データ149の次に生成されたステレオ画像データ149とに基づいて2つの車両モデル291を生成する。
【0124】
S130Bの後、S140に進む。
【0125】
S140以降の処理は実施の形態1(図4参照)と同様である。
【0126】
実施の形態2において、ステレオカメラ140がステレオカメラ処理装置201の機能構成(図10参照)の一部または全部を備えても構わない。
また、路側処理装置300がステレオカメラ処理装置201の機能構成の一部または全部を備えても構わない。
【0127】
実施の形態2における安全速度警報システム100は、ステレオカメラ140を用いて車両の速度、車両の車種および路面の状態を検出する。
つまり、車両の速度、車両の形状および路面の状態を検出するために複数のセンサを必要とせず、システム構成を簡略化することができる。
また、DSRC通信をしなくても車両の速度および車種を検出することができるため、DSRC通信用の車載器を搭載していない車両の運転者に対しても路側表示板を用いて減速を促すことができる。
【符号の説明】
【0128】
100 安全速度警報システム、110 レーザセンサ、119 観測データ、120 路側表示板、130 DSRC無線装置、190 車両、191 車載器、192 カーナビ、200 レーザセンサ処理装置、210 観測データ入力部、220 車両検出部、230 路面状態判定部、240 車両モデル生成部、250 速度算出部、260 車種判定部、270 速度情報出力部、290 速度算出記憶部、291 車両モデル、292 車種データ、299 走行データ、300 路側処理装置、310 速度データ入力部、320 安全速度取得部、330 速度判定部、340 通報指示部、390 速度判定記憶部、391 安全速度データ、901 CPU、902 バス、903 ROM、904 RAM、905 通信ボード、920 磁気ディスク装置、921 OS、922 プログラム群、923 ファイル群。
【特許請求の範囲】
【請求項1】
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサと、
前記レーザセンサにより観測された観測結果に基づいて前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成し、生成した複数の車両モデルが表す複数の走行位置に基づいて前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出装置と、
前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定する速度判定装置と、
前記速度判定装置により前記走行車両の走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する路側表示装置と
を備えたことを特徴とする運転支援システム。
【請求項2】
前記速度算出装置は、生成した少なくともいずれかの車両モデルが表す前記走行車両の車両形状に基づいて前記走行車両の車種を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種に基づいて前記走行車両の走行速度が前記走行車両の車種に対応する所定速度を超えているか否かを判定する
ことを特徴とする請求項1記載の運転支援システム。
【請求項3】
前記レーザセンサは、前記道路の路面をレーザ光を用いて観測し、
前記速度算出装置は、前記レーザセンサにより観測された路面の観測結果に基づいて前記道路の路面状態を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記道路の路面形状に基づいて前記走行車両の走行速度が前記走行車両の車種と前記道路の路面状態とに対応する所定速度を超えているか否かを判定する
ことを特徴とする請求項2記載の運転支援システム。
【請求項4】
前記レーザセンサは、道路の所定のスキャン領域に向けて複数のレーザ光を照射し、前記スキャン領域で反射して戻ってきた複数のレーザ光を複数の反射光として検出し、検出した反射光毎にレーザ光を照射してから反射光を検出するまでの時間を遅延時間として計測し、
前記速度算出装置は、前記レーザセンサにより第1の計測で計測された少なくともいずれかの遅延時間に基づいて前記スキャン領域を車両が走行しているか否かを判定し、前記スキャン領域を車両が走行していると判定した場合、前記レーザセンサにより第1の計測で計測された複数の遅延時間に基づいて前記スキャン領域を走行している走行車両の車両形状と前記走行車両の走行位置とを表す第1の車両モデルを生成し、前記レーザセンサにより第2の計測で計測された複数の遅延時間に基づいて前記走行車両の車両形状と前記走行車両の走行位置とを表す第2の車両モデルを生成し、前記第1の車両モデルが表す走行位置から前記第2の車両モデルが表す走行位置までの距離を前記走行車両の走行距離として算出し、前記第1の計測時から前記第2の計測時までの時間を前記走行車両の走行時間として算出し、算出した走行時間と走行距離とに基づいて前記走行車両の走行速度を算出し、
前記速度判定装置は、前記速度算出装置により算出された前記走行車両の走行速度が所定の安全速度を超えているか否かを判定し、
前記路側表示装置は、前記レーザセンサから前記走行車両の進行方向に特定距離だけ離れた位置に設置され、
前記路側表示装置は、前記速度判定装置により前記走行車両の走行速度が前記安全速度を超えていると判定された場合、所定のメッセージを表示する
ことを特徴とする請求項1から請求項3いずれかに記載の運転支援システム。
【請求項5】
前記第1の車両モデルと前記第2の車両モデルとは、前記走行車両の大きさを表し、
前記速度算出装置は、前記第1の車両モデルと前記第2の車両モデルとの少なくともいずれかが表す前記走行車両の大きさに基づいて前記走行車両の車種を判定し、
前記速度判定装置は、安全速度と普通車両であるか否かを示す車種とを対応付けた安全速度データを記憶する安全速度データ記憶部を備え、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種に基づいて前記走行車両の車種に対応する安全速度を前記安全速度データから取得し、取得した安全速度と前記走行車両の走行速度とを比較し、前記走行車両の走行速度が前記安全速度を超えているか否かを判定する
ことを特徴とする請求項4記載の運転支援システム。
【請求項6】
前記レーザセンサは、検出した反射光の強度を計測し、
前記速度算出装置は、前記レーザセンサにより計測された反射光の強度に基づいて前記道路の路面状態を判定し、
前記安全速度データは、安全速度と車種と路面が乾燥しているか否かを示す路面状態とを対応付けて示し、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種と前記道路の路面状態とに基づいて前記走行車両の車種と前記道路の路面状態とに対応する安全速度を前記安全速度データから取得し、取得した安全速度と前記走行車両の走行速度とを比較し、前記走行速度が前記安全速度を超えているか否かを判定する
ことを特徴とする請求項5記載の運転支援システム。
【請求項7】
レーザセンサが、道路を走行する走行車両をレーザ光を用いて観測し、
速度算出装置が、前記レーザセンサにより観測された観測結果に基づいて前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成し、生成した複数の車両モデルが表す複数の走行位置に基づいて前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出し、
速度判定装置が、前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定し、
路側表示装置が、前記速度判定装置により前記走行車両の走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する
ことを特徴とする運転支援システムの運転支援方法。
【請求項8】
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサにより観測された観測結果に基づいて、前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する車両モデル生成部と、
前記車両モデル生成部により生成された複数の車両モデルが表す複数の走行位置に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出部と
を備えたことを特徴とする速度算出装置。
【請求項9】
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサにより観測された観測結果に基づいて、前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する車両モデル生成処理と、
前記車両モデル生成処理により生成された複数の車両モデルが表す複数の走行位置に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出処理と
をコンピュータに実行させることを特徴とする速度算出プログラム。
【請求項10】
道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成するステレオカメラと、
前記ステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて前記走行車両の前記異なる時刻間の走行距離を算出し、算出した走行距離に基づいて前記走行車両の走行速度を算出する速度算出装置と、
前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定する速度判定装置と、
前記速度判定装置により走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する路側表示装置と
を備えたことを特徴とする運転支援システム。
【請求項11】
前記速度算出装置は、前記ステレオカメラにより生成された少なくともいずれかのステレオ画像に基づいて前記走行車両の車種を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種に基づいて前記走行車両の走行速度が前記走行車両の車種に対応する所定速度を超えているか否かを判定する
ことを請求項10記載の運転支援システム。
【請求項12】
前記ステレオカメラは、前記道路の路面を撮像して路面画像を生成し、
前記速度算出装置は、前記ステレオカメラにより生成された路面画像に基づいて前記道路の路面状態を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記道路の路面状態に基づいて前記走行車両の走行速度が前記走行車両の車種と前記道路の路面状態とに対応する所定速度を超えているか否かを判定する
ことを特徴とする請求項11記載の運転支援システム。
【請求項13】
ステレオカメラが、道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成し、
速度算出装置が、前記ステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて前記走行車両の前記異なる時刻間の走行距離を算出し、算出した走行距離に基づいて前記走行車両の走行速度を算出し、
速度判定装置が、前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定し、
路側表示装置が、前記速度判定装置により走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する
ことを特徴とする運転支援システムの運転支援方法。
【請求項14】
道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成するステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出する走行距離算出部と
前記走行距離算出部により算出された前記異なる時刻間の前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出部と
を備えたことを特徴とする速度算出装置。
【請求項15】
道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成するステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出する走行距離算出処理と
前記走行距離算出処理により算出された前記異なる時刻間の前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出処理と
をコンピュータに実行させることを特徴とする速度算出プログラム。
【請求項1】
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサと、
前記レーザセンサにより観測された観測結果に基づいて前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成し、生成した複数の車両モデルが表す複数の走行位置に基づいて前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出装置と、
前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定する速度判定装置と、
前記速度判定装置により前記走行車両の走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する路側表示装置と
を備えたことを特徴とする運転支援システム。
【請求項2】
前記速度算出装置は、生成した少なくともいずれかの車両モデルが表す前記走行車両の車両形状に基づいて前記走行車両の車種を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種に基づいて前記走行車両の走行速度が前記走行車両の車種に対応する所定速度を超えているか否かを判定する
ことを特徴とする請求項1記載の運転支援システム。
【請求項3】
前記レーザセンサは、前記道路の路面をレーザ光を用いて観測し、
前記速度算出装置は、前記レーザセンサにより観測された路面の観測結果に基づいて前記道路の路面状態を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記道路の路面形状に基づいて前記走行車両の走行速度が前記走行車両の車種と前記道路の路面状態とに対応する所定速度を超えているか否かを判定する
ことを特徴とする請求項2記載の運転支援システム。
【請求項4】
前記レーザセンサは、道路の所定のスキャン領域に向けて複数のレーザ光を照射し、前記スキャン領域で反射して戻ってきた複数のレーザ光を複数の反射光として検出し、検出した反射光毎にレーザ光を照射してから反射光を検出するまでの時間を遅延時間として計測し、
前記速度算出装置は、前記レーザセンサにより第1の計測で計測された少なくともいずれかの遅延時間に基づいて前記スキャン領域を車両が走行しているか否かを判定し、前記スキャン領域を車両が走行していると判定した場合、前記レーザセンサにより第1の計測で計測された複数の遅延時間に基づいて前記スキャン領域を走行している走行車両の車両形状と前記走行車両の走行位置とを表す第1の車両モデルを生成し、前記レーザセンサにより第2の計測で計測された複数の遅延時間に基づいて前記走行車両の車両形状と前記走行車両の走行位置とを表す第2の車両モデルを生成し、前記第1の車両モデルが表す走行位置から前記第2の車両モデルが表す走行位置までの距離を前記走行車両の走行距離として算出し、前記第1の計測時から前記第2の計測時までの時間を前記走行車両の走行時間として算出し、算出した走行時間と走行距離とに基づいて前記走行車両の走行速度を算出し、
前記速度判定装置は、前記速度算出装置により算出された前記走行車両の走行速度が所定の安全速度を超えているか否かを判定し、
前記路側表示装置は、前記レーザセンサから前記走行車両の進行方向に特定距離だけ離れた位置に設置され、
前記路側表示装置は、前記速度判定装置により前記走行車両の走行速度が前記安全速度を超えていると判定された場合、所定のメッセージを表示する
ことを特徴とする請求項1から請求項3いずれかに記載の運転支援システム。
【請求項5】
前記第1の車両モデルと前記第2の車両モデルとは、前記走行車両の大きさを表し、
前記速度算出装置は、前記第1の車両モデルと前記第2の車両モデルとの少なくともいずれかが表す前記走行車両の大きさに基づいて前記走行車両の車種を判定し、
前記速度判定装置は、安全速度と普通車両であるか否かを示す車種とを対応付けた安全速度データを記憶する安全速度データ記憶部を備え、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種に基づいて前記走行車両の車種に対応する安全速度を前記安全速度データから取得し、取得した安全速度と前記走行車両の走行速度とを比較し、前記走行車両の走行速度が前記安全速度を超えているか否かを判定する
ことを特徴とする請求項4記載の運転支援システム。
【請求項6】
前記レーザセンサは、検出した反射光の強度を計測し、
前記速度算出装置は、前記レーザセンサにより計測された反射光の強度に基づいて前記道路の路面状態を判定し、
前記安全速度データは、安全速度と車種と路面が乾燥しているか否かを示す路面状態とを対応付けて示し、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種と前記道路の路面状態とに基づいて前記走行車両の車種と前記道路の路面状態とに対応する安全速度を前記安全速度データから取得し、取得した安全速度と前記走行車両の走行速度とを比較し、前記走行速度が前記安全速度を超えているか否かを判定する
ことを特徴とする請求項5記載の運転支援システム。
【請求項7】
レーザセンサが、道路を走行する走行車両をレーザ光を用いて観測し、
速度算出装置が、前記レーザセンサにより観測された観測結果に基づいて前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成し、生成した複数の車両モデルが表す複数の走行位置に基づいて前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出し、
速度判定装置が、前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定し、
路側表示装置が、前記速度判定装置により前記走行車両の走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する
ことを特徴とする運転支援システムの運転支援方法。
【請求項8】
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサにより観測された観測結果に基づいて、前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する車両モデル生成部と、
前記車両モデル生成部により生成された複数の車両モデルが表す複数の走行位置に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出部と
を備えたことを特徴とする速度算出装置。
【請求項9】
道路を走行する走行車両をレーザ光を用いて観測するレーザセンサにより観測された観測結果に基づいて、前記走行車両の異なる時刻の走行位置と車両形状とを表す複数の車両モデルを生成する車両モデル生成処理と、
前記車両モデル生成処理により生成された複数の車両モデルが表す複数の走行位置に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出し、算出した前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出処理と
をコンピュータに実行させることを特徴とする速度算出プログラム。
【請求項10】
道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成するステレオカメラと、
前記ステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて前記走行車両の前記異なる時刻間の走行距離を算出し、算出した走行距離に基づいて前記走行車両の走行速度を算出する速度算出装置と、
前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定する速度判定装置と、
前記速度判定装置により走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する路側表示装置と
を備えたことを特徴とする運転支援システム。
【請求項11】
前記速度算出装置は、前記ステレオカメラにより生成された少なくともいずれかのステレオ画像に基づいて前記走行車両の車種を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記走行車両の車種に基づいて前記走行車両の走行速度が前記走行車両の車種に対応する所定速度を超えているか否かを判定する
ことを請求項10記載の運転支援システム。
【請求項12】
前記ステレオカメラは、前記道路の路面を撮像して路面画像を生成し、
前記速度算出装置は、前記ステレオカメラにより生成された路面画像に基づいて前記道路の路面状態を判定し、
前記速度判定装置は、前記速度算出装置により判定された前記道路の路面状態に基づいて前記走行車両の走行速度が前記走行車両の車種と前記道路の路面状態とに対応する所定速度を超えているか否かを判定する
ことを特徴とする請求項11記載の運転支援システム。
【請求項13】
ステレオカメラが、道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成し、
速度算出装置が、前記ステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて前記走行車両の前記異なる時刻間の走行距離を算出し、算出した走行距離に基づいて前記走行車両の走行速度を算出し、
速度判定装置が、前記速度算出装置により算出された前記走行車両の走行速度が所定速度を超えているか否かを判定し、
路側表示装置が、前記速度判定装置により走行速度が所定速度を超えていると判定された場合、所定メッセージを表示する
ことを特徴とする運転支援システムの運転支援方法。
【請求項14】
道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成するステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出する走行距離算出部と
前記走行距離算出部により算出された前記異なる時刻間の前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出部と
を備えたことを特徴とする速度算出装置。
【請求項15】
道路を走行する走行車両を異なる方向から撮像してステレオ画像を生成するステレオカメラにより生成された異なる時刻の複数のステレオ画像に基づいて、前記異なる時刻間の前記走行車両の走行距離を算出する走行距離算出処理と
前記走行距離算出処理により算出された前記異なる時刻間の前記走行車両の走行距離に基づいて前記走行車両の走行速度を算出する速度算出処理と
をコンピュータに実行させることを特徴とする速度算出プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−163998(P2012−163998A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−21616(P2011−21616)
【出願日】平成23年2月3日(2011.2.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月3日(2011.2.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]