
運転支援システム、運転支援方法及び統計プログラム
【課題】各地点に対する運転支援を、各車両の状態に応じて行うことができる運転支援システム、運転支援方法及び統計プログラムを提供する。
【解決手段】道路上のスリップ地点に対する運転支援を行う運転支援システムにおいて、管理サーバ2は、各車両Cのナビゲーション装置5から、車両Cの走行状態を検出した加速度を含むプローブデータを取得し、プローブデータ記憶部に蓄積する。また、蓄積したプローブデータのうち、同じスリップ地点に対するプローブデータを抽出し、抽出したプローブデータに含まれる加速度と、プローブデータの蓄積数とに基づき、支援を実行するためのスリップ閾値を取得する。ナビゲーション装置5は、スリップ閾値と、スリップ地点に接近した車両Cの加速度とを比較して、スリップ地点に対する支援を該車両Cに対して実行するか否かを判断する。
【解決手段】道路上のスリップ地点に対する運転支援を行う運転支援システムにおいて、管理サーバ2は、各車両Cのナビゲーション装置5から、車両Cの走行状態を検出した加速度を含むプローブデータを取得し、プローブデータ記憶部に蓄積する。また、蓄積したプローブデータのうち、同じスリップ地点に対するプローブデータを抽出し、抽出したプローブデータに含まれる加速度と、プローブデータの蓄積数とに基づき、支援を実行するためのスリップ閾値を取得する。ナビゲーション装置5は、スリップ閾値と、スリップ地点に接近した車両Cの加速度とを比較して、スリップ地点に対する支援を該車両Cに対して実行するか否かを判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援システム、運転支援方法及び統計プログラムに関する。
【背景技術】
【0002】
近年、自動車の円滑な走行を図るために、高度道路交通システム(Intelligent Transport Systems)の開発が進められている。例えば、自動車に搭載された通信装置から、車
両挙動等を計測した計測データ(以下、プローブ情報という)を取得するシステムがある。
【0003】
上記プローブ情報には、例えば車両位置、速度、方向、ワイパーのオン/オフ等が含まれ、プローブ情報を収集したサーバは、各プローブ情報を統計処理して、渋滞情報や天候情報を生成する。さらに、サーバは、生成した渋滞情報等を配信対象の車両やユーザが使用する端末に配信する。
【0004】
このようなシステムの一例として、特許文献1には、ABSの作動地点を車載装置から収集し、収集した車両情報に基づき危険領域を判断するシステムが記載されている。このシステムでは、危険領域に車両が接近すると、その車両に注意喚起情報を送信する。車載装置は、注意喚起情報を受信すると、注意喚起情報をディスプレイに表示する。
【特許文献1】特開2004−348254号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上記したシステムでは、車両が危険領域に接近した場合に、各車両の状態を考慮することなく、注意喚起情報を送信する。従って、例えば車両がABS(Antilock Brake System)の作動し難い速度で徐行しているにも関わらず、注意喚起が行われると、
ドライバーにとって煩わしい支援となる。
【0006】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、各地点に対する運転支援を、各車両の状態に応じて行うことができる運転支援システム、運転支援方法及び統計プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記問題点を解決するために、請求項1に記載の発明は、自車両に対する運転支援を行う運転支援システムにおいて、各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得し、プローブ情報記憶手段に格納するプローブ情報格納手段と、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段と、自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断する支援判断手段とを備えたことを要旨とする。
【0008】
請求項2に記載の発明は、請求項1に記載の運転支援システムにおいて、前記プローブ情報格納手段は、前記各車両の加速度を含むプローブ情報を取得し、前記閾値取得手段は、支援を実行するための加速度の閾値を取得し、前記支援判断手段は、前記自車が接近した地点における前記閾値と前記自車の加速度とを比較して、前記自車が接近した地点に対する支援を実行するか否かを判断することを要旨とする。
【0009】
請求項3に記載の発明は、請求項2に記載の運転支援システムにおいて、前記自車の前後加速度及び横加速度を取得する加速度取得手段と、前記地点が、コーナーであるか否かを判断する道路形状判断手段とをさらに備え、前記閾値取得手段は、支援を実行するための前後加速度の閾値及び横加速度の閾値を取得し、前記支援判断手段は、前記自車が接近した地点がコーナーである場合に前記自車が接近した地点における前記閾値と前記自車の横加速度とを比較し、前記自車が接近した地点がコーナーでない場合に前記自車が接近した地点における前記閾値と前記自車の前後加速度とを比較することを要旨とする。
【0010】
請求項4に記載の発明は、請求項1〜3のいずれか1項に記載の運転支援システムにおいて、前記閾値取得手段は、前記同じ地点に対する前記プローブ情報を抽出して、該プローブ情報の蓄積数に基づいて、誤差範囲を省いた利用範囲を算出し、該利用範囲に含まれる検出値の下限値を前記閾値とすることを要旨とする。
【0011】
請求項5に記載の発明は、自車両に対する運転支援を行う統計装置と、各車両の車載装置を用いた運転支援方法において、前記統計装置が、前記各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得して、プローブ情報記憶手段に格納し、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出し、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得するとともに、前記車載装置が、自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断することを要旨とする。
【0012】
請求項6に記載の発明は、自車両に対する運転支援を行う統計装置を用いた統計プログラムにおいて、前記統計装置を、各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得し、プローブ情報記憶手段に蓄積するプローブ情報格納手段と、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段として機能させることを要旨とする。
【発明の効果】
【0013】
請求項1に記載の構成によれば、プローブ情報に含まれる検出値に基づき閾値を設定する。このため、自車が接近した地点における閾値と、車両の検出値とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【0014】
請求項2に記載の発明によれば、加速度の閾値を設定し、閾値と車両の加速度とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【0015】
請求項3に記載の構成によれば、地点がコーナーである場合に、閾値と車両の横加速度を比較し、地点がコーナーでない場合に、閾値と車両の前後加速度とを比較する。このため、道路形状に応じて支援の可否を決定することができるので、的確な支援を行うことができる。
【0016】
請求項4に記載の構成によれば、プローブ情報の蓄積数に基づいて利用範囲を特定し、該利用範囲の下限値を閾値とするので、正確性にかけると推定される検出値は統計対象として考慮せず、信頼性の高いプローブ情報に基づき閾値を決定することができる。
【0017】
請求項5に記載の方法によれば、プローブ情報に含まれる検出値に基づき閾値を設定す
る。このため、自車が接近した地点における閾値と、車両の検出値とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【0018】
請求項6に記載の構成によれば、統計プログラムに従って、プローブ情報に含まれる検出値に基づき閾値を設定する。このため、車両で利用する際には、自車が接近した地点における閾値と、車両の検出値とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【発明を実施するための最良の形態】
【0019】
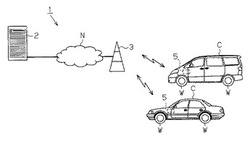
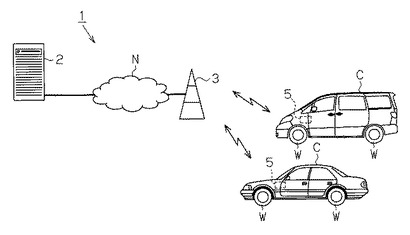
以下、本発明を具体化した第1実施形態を図1〜図9に従って説明する。図1は、本実施形態の運転支援システム1の概略図である。
図1に示すように、運転支援システム1は、統計装置としての統計サーバ2、基地局3、車載装置としてのナビゲーション装置5を有している。統計サーバ2は、インターネット、又は専用回線等のネットワークNを介して、各車両Cに搭載された各ナビゲーション装置5に各種データを送受信可能に接続されている。所定の各地域毎に設置された基地局3は、該地域を示す識別子を各車両Cに向けて送信し、ナビゲーション装置5は、受信した地域識別子及び車両識別子を、基地局3を介して統計サーバ2に送信する。統計サーバ2は、受信した地域識別子及び車両識別子に基づいて、車両Cが走行している地域を逐次特定する。
【0020】
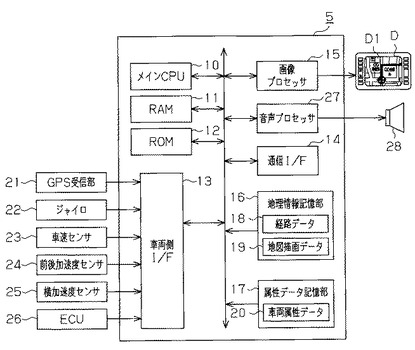
次に、ナビゲーション装置5の構成について、図2に従って説明する。ナビゲーション装置5は、メインCPU10、RAM11、ROM12、車両側インターフェース(I/F)13、通信インターフェース(I/F)14、画像プロセッサ15、地理情報記憶部16及び属性データ記憶部17、音声プロセッサ27を備えている。尚、メインCPU10は、支援判断手段、道路形状判断手段、加速度取得手段に対応している。
【0021】
メインCPU10は、車両側I/F13を介して、GPS受信部21から絶対位置検出信号を入力して、車両Cの緯度・経度を算出する。また、ジャイロ22及び車速センサ23から各種信号を入力して、自律航法により自車位置を検出し、GPS受信部21に基づく絶対位置と組み合わせて、自車位置を特定する。
【0022】
また、メインCPU10は、車両側I/F13を介して、前後加速度センサ24、横加速度センサ25から電気信号を入力する。前後加速度センサ24は、車両の前後方向に平行な方向の前後加速度Gxを計測し、横加速度センサ25は、車両の前後方向の横加速度Gyを計測する。尚、各加速度Gx,Gyは、検出値に対応する。
【0023】
さらにメインCPU10は、車両側I/F13を介して、安全装置としてのABSを制御するECU26から電気信号を受信する。ECU26は、車速センサ23から車速パルス信号を入力して、該信号に基づき各車輪速度を演算し、車体速度を推定する。ブレーキペダルが踏み込まれることにより、車体速度と車輪速度との差が大きくなると、各車輪のうちいずれかがロックしそうになる。このときECU26は、その車輪速度が予め設定された基準値よりも低くなると、ABSアクチュエータにブレーキ油圧の増減を指示する制御信号を出力し、車輪に加わる制動力を制御する。また、ECU26は、ABSアクチュエータを作動させると、ナビゲーション装置5にABS作動信号を出力する。
【0024】
また、通信I/F14は、統計サーバ2に各種データを送受信するためのインターフェースである。
地理情報記憶部16は、ハードディスク等の外部記憶媒体であって、目的地までの経路を探索するための経路データ18と、ディスプレイDに地図画面D1を出力するための地
図描画データ19とが格納されている。
【0025】
メインCPU10は、この経路データ18を用いて、目的地と現在の自車位置とを接続する推奨経路を探索する。また、メインCPU10は、自車位置と、地図描画データ19とを用いて、車両Cを道路上に特定するマップマッチングを行う。即ち、地図描画データ19は、地図を描画する描画データの他に、道路を実際の形状と同じ様に描画するための道路形状データを有している。この道路形状データは、各ノード間に配置される形状補間点の座標や、コーナーの曲率半径等を有している。メインCPU10は、ジャイロ22及び車速センサ23に基づき走行軌跡を算出し、該走行軌跡を、車両Cが走行中である道路の上記道路形状データと照合する。そして、走行軌跡と道路形状との間にずれがある場合には、走行軌跡が道路形状に沿うように、予め算出した自車位置を道路上の適切な位置に特定する。
【0026】
属性データ記憶部17には、車両属性データ20が記憶されている。車両属性データ20は、該ナビゲーション装置5が搭載された車両Cの属性を示すデータである。車両属性データ20は、車両ID、車型、車種、走行距離、使用年数と、車重又は車輪の接地荷重とを有している。車型は、「セダン」等の型式を示し、車種は、車両Cの車名が格納されている。走行距離は、車両Cの累積走行距離であって、使用年数は製造時からの経過年数を示す。車重又は接地荷重は、車両Cの重量又は各車輪に加わる接地荷重を予め計測したデータである。
【0027】
また、ナビゲーション装置5は、統計サーバ2に対し、走行中の車両挙動を示すプローブ情報としてのプローブデータ30を送信する。本実施形態では、ナビゲーション装置5は、ECU26からABS作動信号を受信した際、プローブデータ30を生成及び送信するが、所定時間毎に送信するようにしてもよい。
【0028】
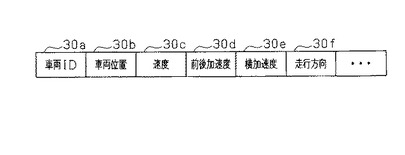
図3に示すように、プローブデータ30は、車両ID30a、車両位置30b、速度30c、前後加速度30d、横加速度30e、走行方向30fを有している。車両ID30aは、プローブデータ30の発信元を示す識別子である。車両位置30bは、ABSが作動した際の車両位置である。速度30c、前後加速度30d、横加速度30eはABSが作動した際の速度及び加速度である。走行方向30fは、ABSが作動した際の車両Cの進行方向である。
【0029】
また、画像プロセッサ15は、地図画面D1や設定画面、警告画面等の各種画面をディスプレイDに表示する。音声プロセッサ27は、スピーカ28から経路を案内する案内音声、ドライバーの注意を喚起する音声等を出力する。
【0030】
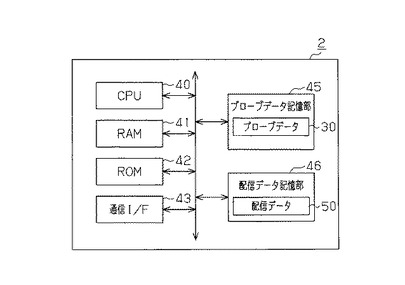
次に、統計サーバ2の構成について、図4に従って説明する。統計サーバ2は、CPU40、RAM41、ROM42、通信インターフェース(I/F)43、プローブ情報記憶手段としてのプローブデータ記憶部45及び配信データ記憶部46を備えている。CPU40は、プローブ情報格納手段、抽出手段、閾値取得手段に対応する。
【0031】
CPU40は、ROM42等に記憶された統計プログラムに基づいて、ナビゲーション装置5から取得したプローブデータ30を統計する。
プローブデータ記憶部45には、ナビゲーション装置5から取得したプローブデータ30が、車両属性データ20に関連付けられて記憶されている。
【0032】
CPU40は、上記統計プログラムに従って、プローブデータ30に基づき、ABSが作動した地点(以下、スリップ地点と標記)の位置を算出する。また、プローブデータ30を統計して、スリップ閾値を算出する。
【0033】
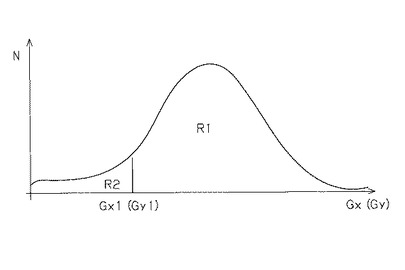
具体的には、プローブデータ30のデータ数と、前後加速度Gxとが、図5に示すような分布となるとすると、この分布のうち、信頼性の高い信頼範囲R1を特定する。本実施形態では、全データ数の所定率が含まれる範囲を信頼範囲R1とし、該所定率を80%とする。そして、信頼範囲R1の下限値を、前後加速度Gxの下限閾値Gx1とする。また、横加速度Gyの下限閾値Gy1も同様に算出する。信頼範囲R1以外であって、誤りである確率が高い誤差範囲R2は、スリップ閾値の算出に用いない。
【0034】
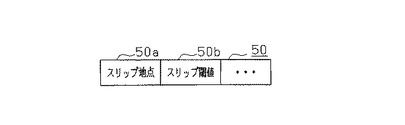
これらの下限閾値Gx1,Gy1を算出すると、図6に示す配信データ50を生成する。配信データ50は、スリップ地点50a、スリップ閾値50bを含んでいる。スリップ地点50aは、スリップが発生した地点又は区間の座標を示す。スリップ閾値50bは、統計処理によって算出した前後加速度Gx及び横加速度Gyの下限閾値Gx1,Gy1を含む。生成した配信データ50は、配信データ記憶部46に記憶する。
【0035】
ナビゲーション装置5は、統計サーバ2から配信データ50を受信すると、スリップ地点50aに基づき、車両Cの進行方向前方であって、所定距離以内に支援地点としてのスリップ地点があるか否かを判断する。スリップ地点がある場合には、該配信データ50に基づき、注意喚起を行うか否かを判断する。
【0036】
メインCPU10は、スリップ地点50aが示す座標と、地図描画データ19の道路形状データ等を用いて、スリップ地点がコーナーであるか、又は交差点等のコーナー以外の場所であるか否かを判断する。
【0037】
スリップ地点がコーナーである場合、曲率半径が一定であるコーナー区間を特定する。また、スリップ地点から所定距離離れた地点で、車両Cの現在速度を取得し、該現在速度と、コーナーの曲率半径とから、現在速度でコーナ区間に進入した際に発生する横加速度Gyを推定する。横加速度Gyが下限閾値Gy1未満である場合には、スリップ地点に対する注意喚起を行わない。また、横加速度Gyが下限閾値Gy1以上である場合には、車両前方のスリップ地点に対して、注意喚起処理を行う。注意喚起処理では、メインCPU10は、ディスプレイDに、ドライバーの注意を喚起する表示の出力、スピーカ28からの音声出力を行う。
【0038】
一方、スリップ地点がコーナーではなく、停止線付近等である場合、スリップ地点から所定距離手前での現在速度を取得し、現在速度を取得した地点から一定の減速度で減速し、停止線付近で車速が「0」となるための前後加速度Gxを推定する。そして、前後加速度Gxと、配信データ50に含まれる下限閾値Gx1とを比較する。前後加速度Gxが下限閾値Gx1未満である場合には、スリップ地点に対する注意喚起を行わない。また、前後加速度Gxが下限閾値Gx1以上である場合には、車両前方のスリップ地点に対して、注意喚起処理を行う。
(処理手順)
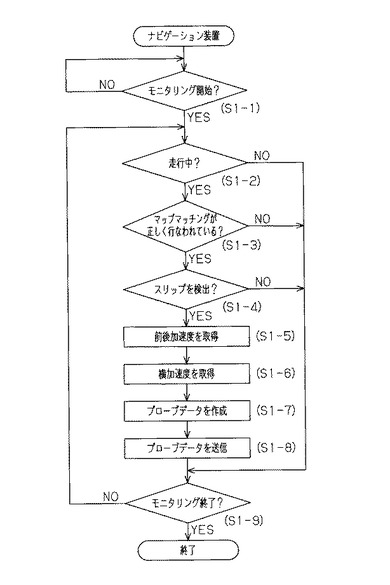
次に、本実施形態の処理手順について、図7〜図9に従って説明する。まず、ナビゲーション装置5が行うプローブデータ30の送信処理について図7に従って説明する。ナビゲーション装置5は、モニタリングを開始するか否かを判断する(ステップS1−1)。例えば、ナビゲーション装置5が起動した時、或いはイグニッションからのオン信号を入力した時、又は所定の操作スイッチがオン操作された時、モニタリングを開始すると判断する(ステップS1−1においてYES)。
【0039】
次に、ナビゲーション装置5のメインCPU10は、車両Cが走行中であるか否かを判断する(ステップS1−2)。このとき、例えば、シフトポジションセンサから入力した検出信号に基づき、シフトポジションがパーキングポジション以外の位置にある場合に、
走行中であると判断してもよい。
【0040】
走行中であると判断すると(ステップS1−2においてYES)、メインCPU10は、マップマッチングが正しく行われているか否かを判断する(ステップS1−3)。車両Cの走行軌跡が、道路形状データに沿っている場合には、上記マップマッチングが正しく行われていると判断して(ステップS1−3においてYES)、ステップS1−4に進む。
【0041】
走行中でないと判断すると(ステップS1−2においてNO)、ステップS1−9に進む。また、走行軌跡と道路形状データとが合致しない場合には、マップマッチングが正しく行われていないと判断し(ステップS1−3においてNO)、ステップS1−9に進む。ステップS1−9では、メインCPU10は、モニタリング終了であるか否かを判断する。ナビゲーション装置5のシャットダウン、又はイグニッションからのオフ信号、又は所定の操作スイッチのオフ操作を示す信号を入力した場合等には、モニタリング終了であると判断する(ステップS1−9においてYES)。ナビゲーション装置5が起動中である、又は上記信号を入力していない場合には(ステップS1−9においてNO)、ステップS1−2に戻り、上記した処理を繰り返す。
【0042】
一方、ステップS1−4では、メインCPU10は、スリップを検出したか否かを判断する。ここでは、ECU26から、ABS作動信号を入力したか否かを判断する。ABS作動信号を入力した場合、スリップを検出したと判断して(ステップS1−4においてYES)、ステップS1−5に進む。ABS作動信号を入力しない場合には(ステップS1−4においてNO)、ステップS1−9に進む。
【0043】
ステップS1−5では、メインCPU10は、前後加速度センサ24から前後加速度Gxを取得する。また、メインCPU10は、横加速度センサ25から、横加速度Gyを取得する(ステップS1−6)。各加速度Gx,Gyを取得すると、メインCPU10は、各加速度Gx,Gyを含むプローブデータ30を生成し(ステップS1−7)、生成したプローブデータ30を送信する(ステップS1−8)。尚、プローブデータ30とともに、車両属性データ20を送信するようにしてもよい。統計サーバ2は、プローブデータ30を受信すると、プローブデータ30をプローブデータ記憶部45に記憶する。
【0044】
プローブデータ30を送信すると、モニタリング終了であるか否かを判断し(ステップS1−9)、終了である場合には(ステップS1−9においてYES)処理を終了し、終了でない場合には(ステップS1−9においてNO)、上記した処理を繰り返す。
【0045】
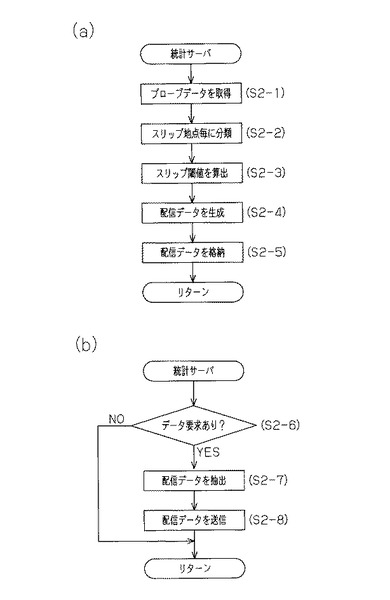
次に、統計サーバ2によるプローブデータ30の統計の処理について図8(a)に従って説明する。統計サーバ2は、この処理を所定時間毎に実行しても良いし、新たに受信したプローブデータ30のデータ数が所定数以上になった場合に実行してもよい。
【0046】
まず、統計サーバ2のCPU40は、蓄積されたプローブデータ30をプローブデータ記憶部45から取得する(ステップS2−1)。また、スリップ地点の座標を示す車両位置30bに基づき、プローブデータ30をスリップ地点毎に分類する(ステップS2−2)。分類したプローブデータ30は、プローブデータ記憶部45等に一時格納される。
【0047】
続いて、CPU40は、上記したようにスリップ閾値を算出する(ステップS2−3)。即ち、プローブデータ30のデータ数と、前後加速度30dとをパラメータとした分布に基づき、信頼範囲R1を特定する。また、この信頼範囲R1の下限値を下限閾値Gx1とする。さらに、プローブデータ30のデータ数と、横加速度30eとをパラメータとした分布に基づき信頼範囲R1を特定し、該信頼範囲R1の下限値を下限閾値Gy1とする
。そして、これらの下限閾値Gx1,Gy1をスリップ閾値50bとする。
【0048】
スリップ閾値50bを算出すると、CPU40は、配信データ50を生成する(ステップS2−4)。またステップS2−2で、プローブデータ30を分類する際には同一地点とみなす範囲に幅をもたせてあり、その車両位置30bにはずれがあるため、信頼範囲R1に含まれるプローブデータ30の車両位置30bを抽出し、該車両位置30bの平均値又は中央値等を取得して、スリップ地点50aの座標を算出する。或いは、車両位置30bのうち、進行方向において最も手前となる位置をスリップ地点50aとしてもよい。
【0049】
このように配信データ50を生成すると、CPU40は、配信データ50を配信データ記憶部46に格納する(ステップS2−5)。そして、ステップS2−1に戻り、上記した処理を繰り返す。
【0050】
また、統計サーバ2は、ナビゲーション装置5からのデータ要求に応じて、生成した配信データ50を配信する。具体的には、図8(b)に示すように、統計サーバ2は、ナビゲーション装置5から、スリップ地点に関するデータ要求を受信したか否かを判断する(ステップS2−6)。データ要求を受信しない場合(ステップS2−6においてNO)、ナビゲーション装置5からのデータ要求を待機する。
【0051】
データ要求を受信した場合には(ステップS2−6においてYES)、そのデータ要求とともに受信した車両Cの自車位置に基づいて、その自車位置から進行方向前方において所定距離内に対する配信データ50を配信データ記憶部46から抽出する(ステップS2−7)。また、通信I/F43を介して配信データ50を各車両Cに送信する(ステップS2−8)。
【0052】
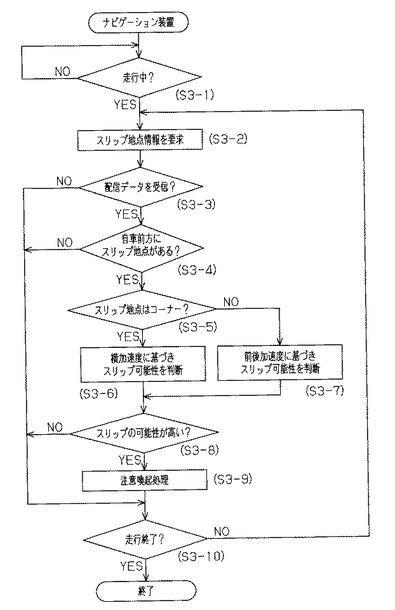
次に、配信データ50を受信したナビゲーション装置5の処理について、図9に従って説明する。メインCPU10は、車両Cが走行中であるか否かを上記したように判断し(ステップS3−1)、走行中である場合には(ステップS3−1においてYES)、統計サーバ2に対して、スリップ地点情報の要求を行う(ステップS3−2)。このとき、メインCPU10は、車両Cが走行している道路上であって、自車位置から進行方向前方において所定距離内のスリップ地点情報を要求する。
【0053】
また、メインCPU10は、統計サーバ2から配信データ50を受信したか否かを判断し(ステップS3−3)、受信した場合には(ステップS3−3においてYES)、自車前方にスリップ地点があるか否かを判断する(ステップS3−4)。
【0054】
配信データ50のスリップ地点50aに基づき、自車が走行している道路上であって、該道路沿いに自車位置から所定距離範囲内にスリップ地点があると判断すると(ステップS3−4においてYES)、ステップS3−5に進む。自車前方にスリップ地点がない場合には(ステップS3−4においてNO)、ステップS3−10に進む。
【0055】
ステップS3−5では、地図描画データ19の道路形状データに基づき、スリップ地点がコーナーであるか否かを判断する(ステップS3−5)。メインCPU10は、スリップ地点がコーナーであると判断すると(ステップS3−5においてYES)、横加速度センサ25から取得した横加速度Gyに基づき、スリップ可能性を判断する(ステップS3−6)。ここでは、上記したように、上記コーナー始点の所定距離手前で車両Cの現在速度を取得し、該現在速度でコーナ区間に進入した際の横加速度Gyを推定し、該横加速度Gyと配信データ50の下限閾値Gy1とを比較する。
【0056】
そして、メインCPU10は、判断結果に基づき、前方のスリップ地点に対して、車両
Cのスリップ可能性が高いか否かを判断する(ステップS3−8)。推定した横加速度Gyが下限閾値Gy1未満であると判断すると(ステップS3−8においてNO)、注意喚起処理を行わずに、ステップS3−10に進む。このため、徐行している場合等、スリップの可能性が極めて低い場合には注意喚起を行わないので、ドライバーにとって煩わしい支援とならない。
【0057】
一方、横加速度Gyが下限閾値Gy1以上であって、スリップの可能性が高いと判断すると(ステップS3−8においてYES),注意喚起処理を行う(ステップS3−9)。即ち、画像プロセッサ15を制御して、ディスプレイDにスリップ地点に対する注意喚起を行う表示を出力する。また、音声プロセッサ27を制御して、スピーカ28から、前方のスリップ地点に対する注意を喚起する案内音声を出力する。これにより、ドライバーはブレーキペダルの踏み込み量等を調整する。尚、この注意喚起処理は、横加速度Gyが下限閾値Gy1未満となるまで継続するようにしてもよい。
【0058】
一方、ステップS3−5において、スリップ地点がコーナーでないと判断すると(ステップS3−5においてNO)、前後加速度Gxに基づきスリップの可能性を判断する(ステップS3−7)。つまり、スリップ地点の所定距離手前での現在速度を取得し、例えば停止線付近で停車するための前後加速度Gxを推定する。そして、前後加速度Gxと、配信データ50に含まれる下限閾値Gx1とを比較する。
【0059】
そして、メインCPU10は、判断結果に基づき、前方のスリップ地点に対して、車両Cのスリップ可能性が高いか否かを判断する(ステップS3−8)。前後加速度Gxが下限閾値Gx1未満である場合(ステップS3−8においてNO)、注意喚起処理を行わずに、ステップS3−10に進む。前後加速度Gxが下限閾値Gx1以上である場合(ステップS3−8においてYES),注意喚起処理を行う(ステップS3−9)。
【0060】
ステップS3−10では、運転支援を終了するか否かを判断する。ナビゲーション装置5のシャットダウン、又はイグニッションからのオフ信号、又は所定の操作スイッチのオフ操作を示す信号を入力した場合等には、支援終了であると判断する(ステップS3−10においてYES)。ナビゲーション装置5が起動中である、又は上記信号を入力していない場合には(ステップS3−10においてNO)、ステップS3−2に戻り、上記した処理を繰り返す。
【0061】
上記実施形態によれば、以下のような効果を得ることができる。
(1)上記実施形態では、統計サーバ2は、各車両Cのナビゲーション装置5から、車両CのABSが作動した時の走行状態を検出した前後加速度Gx及び横加速度Gyを含むプローブデータ30を取得し、プローブデータ記憶部45に格納する。また、格納したプローブデータ30のうち、同じスリップ地点に対するプローブデータ30を抽出し、該プローブデータ30に含まれる各加速度Gx,Gyに基づき、支援を実行するための閾値Gx1,Gy1を取得して、配信データ50を生成し、該配信データ50をナビゲーション装置5に送信する。ナビゲーション装置5は、車両Cが接近したスリップ地点におけるスリップ閾値50bと、車両Cの各加速度Gx、Gyとを比較して、スリップ地点に対する支援を該車両Cに対して実行するか否かを判断する。このため、支援地点に接近した各車両Cの状況に応じて、必要性が高い場合のみ支援を行い、スリップの可能性が低い車両Cに対しては不必要な支援を省略し、煩わしさを軽減することができる。このため、ナビゲーション装置5の実用性を向上できる。
【0062】
(2)上記実施形態では、統計サーバ2は、プローブデータ30を各加速度Gx,Gyに応じて分布させた際に、信頼範囲R1をプローブデータ30のデータ数に応じて算出し、該信頼範囲R1の下限値をスリップ閾値50bとする。このため、正確性にかけると推
定されるプローブデータ30は統計対象として考慮せず、信頼性の高いプローブデータに基づきスリップ閾値50bを決定することができる。
【0063】
(3)上記実施形態では、ナビゲーション装置5は、スリップ地点が、コーナーであるか否かを判断し、スリップ地点がコーナーである場合にスリップ閾値50bと横加速度Gyとを比較し、スリップ地点がコーナーでない場合にスリップ閾値50bと車両Cの前後加速度Gxとを比較する。このため、道路形状に応じて支援の可否を決定することができるので、的確な支援を行うことができる。また、道路形状に応じて、各加速度Gx、Gyのいずれか一方について処理を行うので、ナビゲーション装置5の負荷を軽減することができる。
【0064】
尚、上記各実施形態は以下のように変更してもよい。
・上記実施形態では、ナビゲーション装置5が、スリップ地点がコーナーであるか否かを判断するようにしたが、統計サーバ2が判断するようにしてもよい。そして、コーナーであるスリップ地点に対しては、横加速度Gyのスリップ閾値50bを含む配信データ50を送信し、コーナー以外であるスリップ地点に対しては、前後加速度Gxのスリップ閾値50bを含む配信データ50を送信する。
【0065】
・上記実施形態では、スリップ地点に対する注意喚起を行うようにしたが、段差地点、見通しの悪い地点、合流区間等の地点に対し注意喚起を行うようにしてもよい。
・上記実施形態では、スリップ地点に対する注意喚起を行うようにしたが、スリップの可能性がある場合に、車両Cのエンジントルク制御、駆動輪の自動ブレーキ制御、エンジンブレーキ制御等の各種自動制御を運転支援として行うようにしてもよい。この場合においても、スリップの可能性が低い場合には、必要のない制御を行わないため、ドライバーに減速感等の違和感を与えないようにすることができる。
【0066】
・上記実施形態では、プローブデータ30とともに車両属性データ20を受信した場合に、車型、車種、走行距離、使用年数等の車両情報に基づくプローブデータ30を分類し、各分類毎に統計を行ってもよい。また、ナビゲーション装置5から、車両Cが走行している地域の天候、外気温等の環境条件を取得し、晴天、雨天、雪天等の天候条件や、外気温別に分類してもよい。そして、車両Cからスリップ地点情報の要求を行う際に、車両情報や環境条件を車両から送信し、これらの車両情報や環境条件に合致する配信データ50を車両Cに送信するようにしてもよい。
【0067】
・上記実施形態では、ABSが作動したときにプローブデータ30を送信するようにしたが、安全装置としてのTCS(Traction Control System)が作動したときにプローブ
データ30を送信するようにしてもよい。
【0068】
・上記各実施形態では、車載装置をナビゲーション装置5に具体化したが、ナビゲーション装置5とは別に設けられた装置に具体化してもよい。
・配信データ50に基づく走行支援を行った場合に、その車両Cが段差を通過した後、プローブデータ30を、運転支援を実行したことを示すデータとともに統計サーバ2にフィードバックするようにしてもよい。統計サーバ2は、このプローブデータ30に基づき、走行支援が実行された場合の速度や加速度等を参照し、配信データ50の信頼性を判断し、判断結果に基づいて配信データ50を修正するようにしてもよい。
【0069】
・ナビゲーション装置5は、自車位置を中心とした半径所定距離範囲内のスリップ地点情報を要求するようにしてもよい。
・本実施形態では、信頼範囲R1を全データ数のうち80%のプローブデータ30が含まれる範囲としたが、これ以外のデータ占有率の信頼範囲R1でもよい。例えば、スリッ
プが発生した際のデータ全ての信頼範囲R1としてもよい。この場合には、受信したプローブデータ30のうち、最小の加速度30d,30eを下限閾値Gx1,Gy1とする。
【0070】
・上記実施形態では、全体のデータ数に対する所定率のプローブデータ30が占める範囲を信頼範囲R1としたが、信頼範囲R1はその他の方法によって演算するようにしてもよい。例えば、平均値や標準偏差に基づいて、信頼範囲R1を算出するようにしてもよい。
【図面の簡単な説明】
【0071】
【図1】配信システムの概略図。
【図2】ナビゲーション装置のブロック図。
【図3】プローブデータの概念図。
【図4】統計サーバのブロック図。
【図5】加速度の大きさに応じたプローブデータの分布を説明する概念図。
【図6】配信データの概念図。
【図7】ナビゲーション装置の処理手順のフローチャート。
【図8】(a)は配信データの生成、(b)は配信処理のフローチャート。
【図9】配信データを送信する際の処理手順のフローチャート。
【符号の説明】
【0072】
1…運転支援システム、2…統計装置としての統計サーバ、5…車載装置としてのナビゲーション装置、10…支援判断手段、道路形状判断手段、加速度取得手段としてのメインCPU、30…プローブ情報としてのプローブデータ、40…プローブ情報格納手段、抽出手段、閾値取得手段としてのCPU、45…プローブ情報記憶手段としてのプローブデータ記憶部、50a…スリップ地点、50b…スリップ閾値、C…車両、Gx,30d…検出値としての前後加速度、Gy,30f…検出値としての横加速度、Gx1,Gy1…閾値及び下限値としての下限閾値、R2…誤差範囲。
【技術分野】
【0001】
本発明は、運転支援システム、運転支援方法及び統計プログラムに関する。
【背景技術】
【0002】
近年、自動車の円滑な走行を図るために、高度道路交通システム(Intelligent Transport Systems)の開発が進められている。例えば、自動車に搭載された通信装置から、車
両挙動等を計測した計測データ(以下、プローブ情報という)を取得するシステムがある。
【0003】
上記プローブ情報には、例えば車両位置、速度、方向、ワイパーのオン/オフ等が含まれ、プローブ情報を収集したサーバは、各プローブ情報を統計処理して、渋滞情報や天候情報を生成する。さらに、サーバは、生成した渋滞情報等を配信対象の車両やユーザが使用する端末に配信する。
【0004】
このようなシステムの一例として、特許文献1には、ABSの作動地点を車載装置から収集し、収集した車両情報に基づき危険領域を判断するシステムが記載されている。このシステムでは、危険領域に車両が接近すると、その車両に注意喚起情報を送信する。車載装置は、注意喚起情報を受信すると、注意喚起情報をディスプレイに表示する。
【特許文献1】特開2004−348254号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上記したシステムでは、車両が危険領域に接近した場合に、各車両の状態を考慮することなく、注意喚起情報を送信する。従って、例えば車両がABS(Antilock Brake System)の作動し難い速度で徐行しているにも関わらず、注意喚起が行われると、
ドライバーにとって煩わしい支援となる。
【0006】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、各地点に対する運転支援を、各車両の状態に応じて行うことができる運転支援システム、運転支援方法及び統計プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記問題点を解決するために、請求項1に記載の発明は、自車両に対する運転支援を行う運転支援システムにおいて、各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得し、プローブ情報記憶手段に格納するプローブ情報格納手段と、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段と、自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断する支援判断手段とを備えたことを要旨とする。
【0008】
請求項2に記載の発明は、請求項1に記載の運転支援システムにおいて、前記プローブ情報格納手段は、前記各車両の加速度を含むプローブ情報を取得し、前記閾値取得手段は、支援を実行するための加速度の閾値を取得し、前記支援判断手段は、前記自車が接近した地点における前記閾値と前記自車の加速度とを比較して、前記自車が接近した地点に対する支援を実行するか否かを判断することを要旨とする。
【0009】
請求項3に記載の発明は、請求項2に記載の運転支援システムにおいて、前記自車の前後加速度及び横加速度を取得する加速度取得手段と、前記地点が、コーナーであるか否かを判断する道路形状判断手段とをさらに備え、前記閾値取得手段は、支援を実行するための前後加速度の閾値及び横加速度の閾値を取得し、前記支援判断手段は、前記自車が接近した地点がコーナーである場合に前記自車が接近した地点における前記閾値と前記自車の横加速度とを比較し、前記自車が接近した地点がコーナーでない場合に前記自車が接近した地点における前記閾値と前記自車の前後加速度とを比較することを要旨とする。
【0010】
請求項4に記載の発明は、請求項1〜3のいずれか1項に記載の運転支援システムにおいて、前記閾値取得手段は、前記同じ地点に対する前記プローブ情報を抽出して、該プローブ情報の蓄積数に基づいて、誤差範囲を省いた利用範囲を算出し、該利用範囲に含まれる検出値の下限値を前記閾値とすることを要旨とする。
【0011】
請求項5に記載の発明は、自車両に対する運転支援を行う統計装置と、各車両の車載装置を用いた運転支援方法において、前記統計装置が、前記各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得して、プローブ情報記憶手段に格納し、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出し、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得するとともに、前記車載装置が、自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断することを要旨とする。
【0012】
請求項6に記載の発明は、自車両に対する運転支援を行う統計装置を用いた統計プログラムにおいて、前記統計装置を、各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得し、プローブ情報記憶手段に蓄積するプローブ情報格納手段と、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段として機能させることを要旨とする。
【発明の効果】
【0013】
請求項1に記載の構成によれば、プローブ情報に含まれる検出値に基づき閾値を設定する。このため、自車が接近した地点における閾値と、車両の検出値とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【0014】
請求項2に記載の発明によれば、加速度の閾値を設定し、閾値と車両の加速度とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【0015】
請求項3に記載の構成によれば、地点がコーナーである場合に、閾値と車両の横加速度を比較し、地点がコーナーでない場合に、閾値と車両の前後加速度とを比較する。このため、道路形状に応じて支援の可否を決定することができるので、的確な支援を行うことができる。
【0016】
請求項4に記載の構成によれば、プローブ情報の蓄積数に基づいて利用範囲を特定し、該利用範囲の下限値を閾値とするので、正確性にかけると推定される検出値は統計対象として考慮せず、信頼性の高いプローブ情報に基づき閾値を決定することができる。
【0017】
請求項5に記載の方法によれば、プローブ情報に含まれる検出値に基づき閾値を設定す
る。このため、自車が接近した地点における閾値と、車両の検出値とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【0018】
請求項6に記載の構成によれば、統計プログラムに従って、プローブ情報に含まれる検出値に基づき閾値を設定する。このため、車両で利用する際には、自車が接近した地点における閾値と、車両の検出値とを比較することにより、車両の状況に応じて必要性が高い場合のみ支援を行い、不必要な支援を省略することができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明を具体化した第1実施形態を図1〜図9に従って説明する。図1は、本実施形態の運転支援システム1の概略図である。
図1に示すように、運転支援システム1は、統計装置としての統計サーバ2、基地局3、車載装置としてのナビゲーション装置5を有している。統計サーバ2は、インターネット、又は専用回線等のネットワークNを介して、各車両Cに搭載された各ナビゲーション装置5に各種データを送受信可能に接続されている。所定の各地域毎に設置された基地局3は、該地域を示す識別子を各車両Cに向けて送信し、ナビゲーション装置5は、受信した地域識別子及び車両識別子を、基地局3を介して統計サーバ2に送信する。統計サーバ2は、受信した地域識別子及び車両識別子に基づいて、車両Cが走行している地域を逐次特定する。
【0020】
次に、ナビゲーション装置5の構成について、図2に従って説明する。ナビゲーション装置5は、メインCPU10、RAM11、ROM12、車両側インターフェース(I/F)13、通信インターフェース(I/F)14、画像プロセッサ15、地理情報記憶部16及び属性データ記憶部17、音声プロセッサ27を備えている。尚、メインCPU10は、支援判断手段、道路形状判断手段、加速度取得手段に対応している。
【0021】
メインCPU10は、車両側I/F13を介して、GPS受信部21から絶対位置検出信号を入力して、車両Cの緯度・経度を算出する。また、ジャイロ22及び車速センサ23から各種信号を入力して、自律航法により自車位置を検出し、GPS受信部21に基づく絶対位置と組み合わせて、自車位置を特定する。
【0022】
また、メインCPU10は、車両側I/F13を介して、前後加速度センサ24、横加速度センサ25から電気信号を入力する。前後加速度センサ24は、車両の前後方向に平行な方向の前後加速度Gxを計測し、横加速度センサ25は、車両の前後方向の横加速度Gyを計測する。尚、各加速度Gx,Gyは、検出値に対応する。
【0023】
さらにメインCPU10は、車両側I/F13を介して、安全装置としてのABSを制御するECU26から電気信号を受信する。ECU26は、車速センサ23から車速パルス信号を入力して、該信号に基づき各車輪速度を演算し、車体速度を推定する。ブレーキペダルが踏み込まれることにより、車体速度と車輪速度との差が大きくなると、各車輪のうちいずれかがロックしそうになる。このときECU26は、その車輪速度が予め設定された基準値よりも低くなると、ABSアクチュエータにブレーキ油圧の増減を指示する制御信号を出力し、車輪に加わる制動力を制御する。また、ECU26は、ABSアクチュエータを作動させると、ナビゲーション装置5にABS作動信号を出力する。
【0024】
また、通信I/F14は、統計サーバ2に各種データを送受信するためのインターフェースである。
地理情報記憶部16は、ハードディスク等の外部記憶媒体であって、目的地までの経路を探索するための経路データ18と、ディスプレイDに地図画面D1を出力するための地
図描画データ19とが格納されている。
【0025】
メインCPU10は、この経路データ18を用いて、目的地と現在の自車位置とを接続する推奨経路を探索する。また、メインCPU10は、自車位置と、地図描画データ19とを用いて、車両Cを道路上に特定するマップマッチングを行う。即ち、地図描画データ19は、地図を描画する描画データの他に、道路を実際の形状と同じ様に描画するための道路形状データを有している。この道路形状データは、各ノード間に配置される形状補間点の座標や、コーナーの曲率半径等を有している。メインCPU10は、ジャイロ22及び車速センサ23に基づき走行軌跡を算出し、該走行軌跡を、車両Cが走行中である道路の上記道路形状データと照合する。そして、走行軌跡と道路形状との間にずれがある場合には、走行軌跡が道路形状に沿うように、予め算出した自車位置を道路上の適切な位置に特定する。
【0026】
属性データ記憶部17には、車両属性データ20が記憶されている。車両属性データ20は、該ナビゲーション装置5が搭載された車両Cの属性を示すデータである。車両属性データ20は、車両ID、車型、車種、走行距離、使用年数と、車重又は車輪の接地荷重とを有している。車型は、「セダン」等の型式を示し、車種は、車両Cの車名が格納されている。走行距離は、車両Cの累積走行距離であって、使用年数は製造時からの経過年数を示す。車重又は接地荷重は、車両Cの重量又は各車輪に加わる接地荷重を予め計測したデータである。
【0027】
また、ナビゲーション装置5は、統計サーバ2に対し、走行中の車両挙動を示すプローブ情報としてのプローブデータ30を送信する。本実施形態では、ナビゲーション装置5は、ECU26からABS作動信号を受信した際、プローブデータ30を生成及び送信するが、所定時間毎に送信するようにしてもよい。
【0028】
図3に示すように、プローブデータ30は、車両ID30a、車両位置30b、速度30c、前後加速度30d、横加速度30e、走行方向30fを有している。車両ID30aは、プローブデータ30の発信元を示す識別子である。車両位置30bは、ABSが作動した際の車両位置である。速度30c、前後加速度30d、横加速度30eはABSが作動した際の速度及び加速度である。走行方向30fは、ABSが作動した際の車両Cの進行方向である。
【0029】
また、画像プロセッサ15は、地図画面D1や設定画面、警告画面等の各種画面をディスプレイDに表示する。音声プロセッサ27は、スピーカ28から経路を案内する案内音声、ドライバーの注意を喚起する音声等を出力する。
【0030】
次に、統計サーバ2の構成について、図4に従って説明する。統計サーバ2は、CPU40、RAM41、ROM42、通信インターフェース(I/F)43、プローブ情報記憶手段としてのプローブデータ記憶部45及び配信データ記憶部46を備えている。CPU40は、プローブ情報格納手段、抽出手段、閾値取得手段に対応する。
【0031】
CPU40は、ROM42等に記憶された統計プログラムに基づいて、ナビゲーション装置5から取得したプローブデータ30を統計する。
プローブデータ記憶部45には、ナビゲーション装置5から取得したプローブデータ30が、車両属性データ20に関連付けられて記憶されている。
【0032】
CPU40は、上記統計プログラムに従って、プローブデータ30に基づき、ABSが作動した地点(以下、スリップ地点と標記)の位置を算出する。また、プローブデータ30を統計して、スリップ閾値を算出する。
【0033】
具体的には、プローブデータ30のデータ数と、前後加速度Gxとが、図5に示すような分布となるとすると、この分布のうち、信頼性の高い信頼範囲R1を特定する。本実施形態では、全データ数の所定率が含まれる範囲を信頼範囲R1とし、該所定率を80%とする。そして、信頼範囲R1の下限値を、前後加速度Gxの下限閾値Gx1とする。また、横加速度Gyの下限閾値Gy1も同様に算出する。信頼範囲R1以外であって、誤りである確率が高い誤差範囲R2は、スリップ閾値の算出に用いない。
【0034】
これらの下限閾値Gx1,Gy1を算出すると、図6に示す配信データ50を生成する。配信データ50は、スリップ地点50a、スリップ閾値50bを含んでいる。スリップ地点50aは、スリップが発生した地点又は区間の座標を示す。スリップ閾値50bは、統計処理によって算出した前後加速度Gx及び横加速度Gyの下限閾値Gx1,Gy1を含む。生成した配信データ50は、配信データ記憶部46に記憶する。
【0035】
ナビゲーション装置5は、統計サーバ2から配信データ50を受信すると、スリップ地点50aに基づき、車両Cの進行方向前方であって、所定距離以内に支援地点としてのスリップ地点があるか否かを判断する。スリップ地点がある場合には、該配信データ50に基づき、注意喚起を行うか否かを判断する。
【0036】
メインCPU10は、スリップ地点50aが示す座標と、地図描画データ19の道路形状データ等を用いて、スリップ地点がコーナーであるか、又は交差点等のコーナー以外の場所であるか否かを判断する。
【0037】
スリップ地点がコーナーである場合、曲率半径が一定であるコーナー区間を特定する。また、スリップ地点から所定距離離れた地点で、車両Cの現在速度を取得し、該現在速度と、コーナーの曲率半径とから、現在速度でコーナ区間に進入した際に発生する横加速度Gyを推定する。横加速度Gyが下限閾値Gy1未満である場合には、スリップ地点に対する注意喚起を行わない。また、横加速度Gyが下限閾値Gy1以上である場合には、車両前方のスリップ地点に対して、注意喚起処理を行う。注意喚起処理では、メインCPU10は、ディスプレイDに、ドライバーの注意を喚起する表示の出力、スピーカ28からの音声出力を行う。
【0038】
一方、スリップ地点がコーナーではなく、停止線付近等である場合、スリップ地点から所定距離手前での現在速度を取得し、現在速度を取得した地点から一定の減速度で減速し、停止線付近で車速が「0」となるための前後加速度Gxを推定する。そして、前後加速度Gxと、配信データ50に含まれる下限閾値Gx1とを比較する。前後加速度Gxが下限閾値Gx1未満である場合には、スリップ地点に対する注意喚起を行わない。また、前後加速度Gxが下限閾値Gx1以上である場合には、車両前方のスリップ地点に対して、注意喚起処理を行う。
(処理手順)
次に、本実施形態の処理手順について、図7〜図9に従って説明する。まず、ナビゲーション装置5が行うプローブデータ30の送信処理について図7に従って説明する。ナビゲーション装置5は、モニタリングを開始するか否かを判断する(ステップS1−1)。例えば、ナビゲーション装置5が起動した時、或いはイグニッションからのオン信号を入力した時、又は所定の操作スイッチがオン操作された時、モニタリングを開始すると判断する(ステップS1−1においてYES)。
【0039】
次に、ナビゲーション装置5のメインCPU10は、車両Cが走行中であるか否かを判断する(ステップS1−2)。このとき、例えば、シフトポジションセンサから入力した検出信号に基づき、シフトポジションがパーキングポジション以外の位置にある場合に、
走行中であると判断してもよい。
【0040】
走行中であると判断すると(ステップS1−2においてYES)、メインCPU10は、マップマッチングが正しく行われているか否かを判断する(ステップS1−3)。車両Cの走行軌跡が、道路形状データに沿っている場合には、上記マップマッチングが正しく行われていると判断して(ステップS1−3においてYES)、ステップS1−4に進む。
【0041】
走行中でないと判断すると(ステップS1−2においてNO)、ステップS1−9に進む。また、走行軌跡と道路形状データとが合致しない場合には、マップマッチングが正しく行われていないと判断し(ステップS1−3においてNO)、ステップS1−9に進む。ステップS1−9では、メインCPU10は、モニタリング終了であるか否かを判断する。ナビゲーション装置5のシャットダウン、又はイグニッションからのオフ信号、又は所定の操作スイッチのオフ操作を示す信号を入力した場合等には、モニタリング終了であると判断する(ステップS1−9においてYES)。ナビゲーション装置5が起動中である、又は上記信号を入力していない場合には(ステップS1−9においてNO)、ステップS1−2に戻り、上記した処理を繰り返す。
【0042】
一方、ステップS1−4では、メインCPU10は、スリップを検出したか否かを判断する。ここでは、ECU26から、ABS作動信号を入力したか否かを判断する。ABS作動信号を入力した場合、スリップを検出したと判断して(ステップS1−4においてYES)、ステップS1−5に進む。ABS作動信号を入力しない場合には(ステップS1−4においてNO)、ステップS1−9に進む。
【0043】
ステップS1−5では、メインCPU10は、前後加速度センサ24から前後加速度Gxを取得する。また、メインCPU10は、横加速度センサ25から、横加速度Gyを取得する(ステップS1−6)。各加速度Gx,Gyを取得すると、メインCPU10は、各加速度Gx,Gyを含むプローブデータ30を生成し(ステップS1−7)、生成したプローブデータ30を送信する(ステップS1−8)。尚、プローブデータ30とともに、車両属性データ20を送信するようにしてもよい。統計サーバ2は、プローブデータ30を受信すると、プローブデータ30をプローブデータ記憶部45に記憶する。
【0044】
プローブデータ30を送信すると、モニタリング終了であるか否かを判断し(ステップS1−9)、終了である場合には(ステップS1−9においてYES)処理を終了し、終了でない場合には(ステップS1−9においてNO)、上記した処理を繰り返す。
【0045】
次に、統計サーバ2によるプローブデータ30の統計の処理について図8(a)に従って説明する。統計サーバ2は、この処理を所定時間毎に実行しても良いし、新たに受信したプローブデータ30のデータ数が所定数以上になった場合に実行してもよい。
【0046】
まず、統計サーバ2のCPU40は、蓄積されたプローブデータ30をプローブデータ記憶部45から取得する(ステップS2−1)。また、スリップ地点の座標を示す車両位置30bに基づき、プローブデータ30をスリップ地点毎に分類する(ステップS2−2)。分類したプローブデータ30は、プローブデータ記憶部45等に一時格納される。
【0047】
続いて、CPU40は、上記したようにスリップ閾値を算出する(ステップS2−3)。即ち、プローブデータ30のデータ数と、前後加速度30dとをパラメータとした分布に基づき、信頼範囲R1を特定する。また、この信頼範囲R1の下限値を下限閾値Gx1とする。さらに、プローブデータ30のデータ数と、横加速度30eとをパラメータとした分布に基づき信頼範囲R1を特定し、該信頼範囲R1の下限値を下限閾値Gy1とする
。そして、これらの下限閾値Gx1,Gy1をスリップ閾値50bとする。
【0048】
スリップ閾値50bを算出すると、CPU40は、配信データ50を生成する(ステップS2−4)。またステップS2−2で、プローブデータ30を分類する際には同一地点とみなす範囲に幅をもたせてあり、その車両位置30bにはずれがあるため、信頼範囲R1に含まれるプローブデータ30の車両位置30bを抽出し、該車両位置30bの平均値又は中央値等を取得して、スリップ地点50aの座標を算出する。或いは、車両位置30bのうち、進行方向において最も手前となる位置をスリップ地点50aとしてもよい。
【0049】
このように配信データ50を生成すると、CPU40は、配信データ50を配信データ記憶部46に格納する(ステップS2−5)。そして、ステップS2−1に戻り、上記した処理を繰り返す。
【0050】
また、統計サーバ2は、ナビゲーション装置5からのデータ要求に応じて、生成した配信データ50を配信する。具体的には、図8(b)に示すように、統計サーバ2は、ナビゲーション装置5から、スリップ地点に関するデータ要求を受信したか否かを判断する(ステップS2−6)。データ要求を受信しない場合(ステップS2−6においてNO)、ナビゲーション装置5からのデータ要求を待機する。
【0051】
データ要求を受信した場合には(ステップS2−6においてYES)、そのデータ要求とともに受信した車両Cの自車位置に基づいて、その自車位置から進行方向前方において所定距離内に対する配信データ50を配信データ記憶部46から抽出する(ステップS2−7)。また、通信I/F43を介して配信データ50を各車両Cに送信する(ステップS2−8)。
【0052】
次に、配信データ50を受信したナビゲーション装置5の処理について、図9に従って説明する。メインCPU10は、車両Cが走行中であるか否かを上記したように判断し(ステップS3−1)、走行中である場合には(ステップS3−1においてYES)、統計サーバ2に対して、スリップ地点情報の要求を行う(ステップS3−2)。このとき、メインCPU10は、車両Cが走行している道路上であって、自車位置から進行方向前方において所定距離内のスリップ地点情報を要求する。
【0053】
また、メインCPU10は、統計サーバ2から配信データ50を受信したか否かを判断し(ステップS3−3)、受信した場合には(ステップS3−3においてYES)、自車前方にスリップ地点があるか否かを判断する(ステップS3−4)。
【0054】
配信データ50のスリップ地点50aに基づき、自車が走行している道路上であって、該道路沿いに自車位置から所定距離範囲内にスリップ地点があると判断すると(ステップS3−4においてYES)、ステップS3−5に進む。自車前方にスリップ地点がない場合には(ステップS3−4においてNO)、ステップS3−10に進む。
【0055】
ステップS3−5では、地図描画データ19の道路形状データに基づき、スリップ地点がコーナーであるか否かを判断する(ステップS3−5)。メインCPU10は、スリップ地点がコーナーであると判断すると(ステップS3−5においてYES)、横加速度センサ25から取得した横加速度Gyに基づき、スリップ可能性を判断する(ステップS3−6)。ここでは、上記したように、上記コーナー始点の所定距離手前で車両Cの現在速度を取得し、該現在速度でコーナ区間に進入した際の横加速度Gyを推定し、該横加速度Gyと配信データ50の下限閾値Gy1とを比較する。
【0056】
そして、メインCPU10は、判断結果に基づき、前方のスリップ地点に対して、車両
Cのスリップ可能性が高いか否かを判断する(ステップS3−8)。推定した横加速度Gyが下限閾値Gy1未満であると判断すると(ステップS3−8においてNO)、注意喚起処理を行わずに、ステップS3−10に進む。このため、徐行している場合等、スリップの可能性が極めて低い場合には注意喚起を行わないので、ドライバーにとって煩わしい支援とならない。
【0057】
一方、横加速度Gyが下限閾値Gy1以上であって、スリップの可能性が高いと判断すると(ステップS3−8においてYES),注意喚起処理を行う(ステップS3−9)。即ち、画像プロセッサ15を制御して、ディスプレイDにスリップ地点に対する注意喚起を行う表示を出力する。また、音声プロセッサ27を制御して、スピーカ28から、前方のスリップ地点に対する注意を喚起する案内音声を出力する。これにより、ドライバーはブレーキペダルの踏み込み量等を調整する。尚、この注意喚起処理は、横加速度Gyが下限閾値Gy1未満となるまで継続するようにしてもよい。
【0058】
一方、ステップS3−5において、スリップ地点がコーナーでないと判断すると(ステップS3−5においてNO)、前後加速度Gxに基づきスリップの可能性を判断する(ステップS3−7)。つまり、スリップ地点の所定距離手前での現在速度を取得し、例えば停止線付近で停車するための前後加速度Gxを推定する。そして、前後加速度Gxと、配信データ50に含まれる下限閾値Gx1とを比較する。
【0059】
そして、メインCPU10は、判断結果に基づき、前方のスリップ地点に対して、車両Cのスリップ可能性が高いか否かを判断する(ステップS3−8)。前後加速度Gxが下限閾値Gx1未満である場合(ステップS3−8においてNO)、注意喚起処理を行わずに、ステップS3−10に進む。前後加速度Gxが下限閾値Gx1以上である場合(ステップS3−8においてYES),注意喚起処理を行う(ステップS3−9)。
【0060】
ステップS3−10では、運転支援を終了するか否かを判断する。ナビゲーション装置5のシャットダウン、又はイグニッションからのオフ信号、又は所定の操作スイッチのオフ操作を示す信号を入力した場合等には、支援終了であると判断する(ステップS3−10においてYES)。ナビゲーション装置5が起動中である、又は上記信号を入力していない場合には(ステップS3−10においてNO)、ステップS3−2に戻り、上記した処理を繰り返す。
【0061】
上記実施形態によれば、以下のような効果を得ることができる。
(1)上記実施形態では、統計サーバ2は、各車両Cのナビゲーション装置5から、車両CのABSが作動した時の走行状態を検出した前後加速度Gx及び横加速度Gyを含むプローブデータ30を取得し、プローブデータ記憶部45に格納する。また、格納したプローブデータ30のうち、同じスリップ地点に対するプローブデータ30を抽出し、該プローブデータ30に含まれる各加速度Gx,Gyに基づき、支援を実行するための閾値Gx1,Gy1を取得して、配信データ50を生成し、該配信データ50をナビゲーション装置5に送信する。ナビゲーション装置5は、車両Cが接近したスリップ地点におけるスリップ閾値50bと、車両Cの各加速度Gx、Gyとを比較して、スリップ地点に対する支援を該車両Cに対して実行するか否かを判断する。このため、支援地点に接近した各車両Cの状況に応じて、必要性が高い場合のみ支援を行い、スリップの可能性が低い車両Cに対しては不必要な支援を省略し、煩わしさを軽減することができる。このため、ナビゲーション装置5の実用性を向上できる。
【0062】
(2)上記実施形態では、統計サーバ2は、プローブデータ30を各加速度Gx,Gyに応じて分布させた際に、信頼範囲R1をプローブデータ30のデータ数に応じて算出し、該信頼範囲R1の下限値をスリップ閾値50bとする。このため、正確性にかけると推
定されるプローブデータ30は統計対象として考慮せず、信頼性の高いプローブデータに基づきスリップ閾値50bを決定することができる。
【0063】
(3)上記実施形態では、ナビゲーション装置5は、スリップ地点が、コーナーであるか否かを判断し、スリップ地点がコーナーである場合にスリップ閾値50bと横加速度Gyとを比較し、スリップ地点がコーナーでない場合にスリップ閾値50bと車両Cの前後加速度Gxとを比較する。このため、道路形状に応じて支援の可否を決定することができるので、的確な支援を行うことができる。また、道路形状に応じて、各加速度Gx、Gyのいずれか一方について処理を行うので、ナビゲーション装置5の負荷を軽減することができる。
【0064】
尚、上記各実施形態は以下のように変更してもよい。
・上記実施形態では、ナビゲーション装置5が、スリップ地点がコーナーであるか否かを判断するようにしたが、統計サーバ2が判断するようにしてもよい。そして、コーナーであるスリップ地点に対しては、横加速度Gyのスリップ閾値50bを含む配信データ50を送信し、コーナー以外であるスリップ地点に対しては、前後加速度Gxのスリップ閾値50bを含む配信データ50を送信する。
【0065】
・上記実施形態では、スリップ地点に対する注意喚起を行うようにしたが、段差地点、見通しの悪い地点、合流区間等の地点に対し注意喚起を行うようにしてもよい。
・上記実施形態では、スリップ地点に対する注意喚起を行うようにしたが、スリップの可能性がある場合に、車両Cのエンジントルク制御、駆動輪の自動ブレーキ制御、エンジンブレーキ制御等の各種自動制御を運転支援として行うようにしてもよい。この場合においても、スリップの可能性が低い場合には、必要のない制御を行わないため、ドライバーに減速感等の違和感を与えないようにすることができる。
【0066】
・上記実施形態では、プローブデータ30とともに車両属性データ20を受信した場合に、車型、車種、走行距離、使用年数等の車両情報に基づくプローブデータ30を分類し、各分類毎に統計を行ってもよい。また、ナビゲーション装置5から、車両Cが走行している地域の天候、外気温等の環境条件を取得し、晴天、雨天、雪天等の天候条件や、外気温別に分類してもよい。そして、車両Cからスリップ地点情報の要求を行う際に、車両情報や環境条件を車両から送信し、これらの車両情報や環境条件に合致する配信データ50を車両Cに送信するようにしてもよい。
【0067】
・上記実施形態では、ABSが作動したときにプローブデータ30を送信するようにしたが、安全装置としてのTCS(Traction Control System)が作動したときにプローブ
データ30を送信するようにしてもよい。
【0068】
・上記各実施形態では、車載装置をナビゲーション装置5に具体化したが、ナビゲーション装置5とは別に設けられた装置に具体化してもよい。
・配信データ50に基づく走行支援を行った場合に、その車両Cが段差を通過した後、プローブデータ30を、運転支援を実行したことを示すデータとともに統計サーバ2にフィードバックするようにしてもよい。統計サーバ2は、このプローブデータ30に基づき、走行支援が実行された場合の速度や加速度等を参照し、配信データ50の信頼性を判断し、判断結果に基づいて配信データ50を修正するようにしてもよい。
【0069】
・ナビゲーション装置5は、自車位置を中心とした半径所定距離範囲内のスリップ地点情報を要求するようにしてもよい。
・本実施形態では、信頼範囲R1を全データ数のうち80%のプローブデータ30が含まれる範囲としたが、これ以外のデータ占有率の信頼範囲R1でもよい。例えば、スリッ
プが発生した際のデータ全ての信頼範囲R1としてもよい。この場合には、受信したプローブデータ30のうち、最小の加速度30d,30eを下限閾値Gx1,Gy1とする。
【0070】
・上記実施形態では、全体のデータ数に対する所定率のプローブデータ30が占める範囲を信頼範囲R1としたが、信頼範囲R1はその他の方法によって演算するようにしてもよい。例えば、平均値や標準偏差に基づいて、信頼範囲R1を算出するようにしてもよい。
【図面の簡単な説明】
【0071】
【図1】配信システムの概略図。
【図2】ナビゲーション装置のブロック図。
【図3】プローブデータの概念図。
【図4】統計サーバのブロック図。
【図5】加速度の大きさに応じたプローブデータの分布を説明する概念図。
【図6】配信データの概念図。
【図7】ナビゲーション装置の処理手順のフローチャート。
【図8】(a)は配信データの生成、(b)は配信処理のフローチャート。
【図9】配信データを送信する際の処理手順のフローチャート。
【符号の説明】
【0072】
1…運転支援システム、2…統計装置としての統計サーバ、5…車載装置としてのナビゲーション装置、10…支援判断手段、道路形状判断手段、加速度取得手段としてのメインCPU、30…プローブ情報としてのプローブデータ、40…プローブ情報格納手段、抽出手段、閾値取得手段としてのCPU、45…プローブ情報記憶手段としてのプローブデータ記憶部、50a…スリップ地点、50b…スリップ閾値、C…車両、Gx,30d…検出値としての前後加速度、Gy,30f…検出値としての横加速度、Gx1,Gy1…閾値及び下限値としての下限閾値、R2…誤差範囲。
【特許請求の範囲】
【請求項1】
自車両に対する運転支援を行う運転支援システムにおいて、
各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得し、プローブ情報記憶手段に格納するプローブ情報格納手段と、
格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、
抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段と、
自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断する支援判断手段と
を備えたことを特徴とする運転支援システム。
【請求項2】
請求項1に記載の運転支援システムにおいて、
前記プローブ情報格納手段は、前記各車両の加速度を含むプローブ情報を取得し、
前記閾値取得手段は、支援を実行するための加速度の閾値を取得し、
前記支援判断手段は、前記自車が接近した地点における前記閾値と前記自車の加速度とを比較して、前記自車が接近した地点に対する支援を実行するか否かを判断することを特徴とする運転支援システム。
【請求項3】
請求項2に記載の運転支援システムにおいて、
前記自車の前後加速度及び横加速度を取得する加速度取得手段と、
前記地点が、コーナーであるか否かを判断する道路形状判断手段とをさらに備え、
前記閾値取得手段は、支援を実行するための前後加速度の閾値及び横加速度の閾値を取得し、
前記支援判断手段は、前記自車が接近した地点がコーナーである場合に前記自車が接近した地点における前記閾値と前記自車の横加速度とを比較し、前記自車が接近した地点がコーナーでない場合に前記自車が接近した地点における前記閾値と前記自車の前後加速度とを比較することを特徴とする運転支援システム。
【請求項4】
請求項1〜3のいずれか1項に記載の運転支援システムにおいて、
前記閾値取得手段は、前記同じ地点に対する前記プローブ情報を抽出して、該プローブ情報の蓄積数に基づいて、誤差範囲を省いた利用範囲を算出し、該利用範囲に含まれる検出値の下限値を前記閾値とすることを特徴とする運転支援システム。
【請求項5】
自車両に対する運転支援を行う統計装置と、各車両の車載装置を用いた運転支援方法において、
前記統計装置が、
前記各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得して、プローブ情報記憶手段に格納し、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出し、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得するとともに、
前記車載装置が、
自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断することを特徴とする運転支援方法。
【請求項6】
自車両に対する運転支援を行う統計装置を用いた統計プログラムにおいて、
前記統計装置を、
各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ
情報を取得し、プローブ情報記憶手段に蓄積するプローブ情報格納手段と、
格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、
抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段として機能させるための統計プログラム。
【請求項1】
自車両に対する運転支援を行う運転支援システムにおいて、
各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得し、プローブ情報記憶手段に格納するプローブ情報格納手段と、
格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、
抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段と、
自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断する支援判断手段と
を備えたことを特徴とする運転支援システム。
【請求項2】
請求項1に記載の運転支援システムにおいて、
前記プローブ情報格納手段は、前記各車両の加速度を含むプローブ情報を取得し、
前記閾値取得手段は、支援を実行するための加速度の閾値を取得し、
前記支援判断手段は、前記自車が接近した地点における前記閾値と前記自車の加速度とを比較して、前記自車が接近した地点に対する支援を実行するか否かを判断することを特徴とする運転支援システム。
【請求項3】
請求項2に記載の運転支援システムにおいて、
前記自車の前後加速度及び横加速度を取得する加速度取得手段と、
前記地点が、コーナーであるか否かを判断する道路形状判断手段とをさらに備え、
前記閾値取得手段は、支援を実行するための前後加速度の閾値及び横加速度の閾値を取得し、
前記支援判断手段は、前記自車が接近した地点がコーナーである場合に前記自車が接近した地点における前記閾値と前記自車の横加速度とを比較し、前記自車が接近した地点がコーナーでない場合に前記自車が接近した地点における前記閾値と前記自車の前後加速度とを比較することを特徴とする運転支援システム。
【請求項4】
請求項1〜3のいずれか1項に記載の運転支援システムにおいて、
前記閾値取得手段は、前記同じ地点に対する前記プローブ情報を抽出して、該プローブ情報の蓄積数に基づいて、誤差範囲を省いた利用範囲を算出し、該利用範囲に含まれる検出値の下限値を前記閾値とすることを特徴とする運転支援システム。
【請求項5】
自車両に対する運転支援を行う統計装置と、各車両の車載装置を用いた運転支援方法において、
前記統計装置が、
前記各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ情報を取得して、プローブ情報記憶手段に格納し、格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出し、抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得するとともに、
前記車載装置が、
自車が接近した地点における前記閾値と、該自車の検出値とを比較して、該自車が接近した地点に対する支援を該自車に対して実行するか否かを判断することを特徴とする運転支援方法。
【請求項6】
自車両に対する運転支援を行う統計装置を用いた統計プログラムにおいて、
前記統計装置を、
各車両の車載装置から、車載の安全装置作動時の走行状態を示す検出値を含むプローブ
情報を取得し、プローブ情報記憶手段に蓄積するプローブ情報格納手段と、
格納した前記プローブ情報のうち、同じ地点に対する前記プローブ情報を抽出する抽出手段と、
抽出したプローブ情報に含まれる前記検出値に基づき、支援を実行するための前記検出値の閾値を取得する閾値取得手段として機能させるための統計プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−80659(P2009−80659A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−249586(P2007−249586)
【出願日】平成19年9月26日(2007.9.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月26日(2007.9.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]