
運転支援システム
【課題】運転支援の必要がない状況になった際に速やかに運転支援を終了させる。
【解決手段】ハンドル角センサ11、車速センサ12、ターンシグナルスイッチ13、ブレーキスイッチ14の情報により、運転者の意思に基づいて自車両が支援システムの当該路から外れたことを退出判断部7で認識した時に、判断部6によりカーナビ部5への表示を停止させる。
【解決手段】ハンドル角センサ11、車速センサ12、ターンシグナルスイッチ13、ブレーキスイッチ14の情報により、運転者の意思に基づいて自車両が支援システムの当該路から外れたことを退出判断部7で認識した時に、判断部6によりカーナビ部5への表示を停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行路の状況情報及び車両の走行状況情報に応じて、車両が遭遇すると予想される状況を総合的に判断し、遭遇すると予想される状況に対する注意を運転者に喚起する運転支援システムに関する。
【背景技術】
【0002】
車両を運転する運転者の認知、判断の遅れ、誤りによる交通事故を未然に防止するための運転支援システムが従来から知られている。運転支援システムは、信号情報、道路線形情報、他車両の位置、歩行者の位置等、車両が入手することができない情報を路側の機器から入手し、入手した情報と自車両の走行状況とを基に車両が遭遇すると予想される状況を車載機器で総合的に判断し、必要に応じて、遭遇すると予想される状況に対する注意を最適なタイミングで運転者に喚起するシステムである。
【0003】
例えば、左側走行規制の道路を走行中に、無線通信(光ビーコン)により路側の機器からの情報を入手し、例えば、交差点で右折する際の直進車両の接近を判断し、運転者に接近の認知を喚起して右折可能・不可能の判断を支援するシステムが従来から知られている(例えば、特許文献1参照)。従来の技術によると、遭遇すると予想される状況に対して運転操作を効果的に支援することができる。
【0004】
運転支援システムは、特許文献1で示された右折時の直進車両の認知支援の他に、右左折時の歩行者の認知、交差点での進入車両の認知、前方カーブ先等の信号機や一時停止規制、渋滞の認知、左折時の後続二輪車の認知等を喚起することが実施されている。運転支援システムでは、走行路の状況情報及び車両の走行状況情報に応じて、車両が遭遇すると予想される状況が総合的に判断され、遭遇すると予想される状況に対する注意を必要に応じて運転者に喚起することができる。
【0005】
従来から提案されている運転支援システムは、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合、状況によっては、遭遇すると予想される状況に対する注意の喚起が継続し、音やランプ、画像等で注意の喚起が継続することが考えられる。
【0006】
しかし、従来から提案されている運転支援システムでは、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合の判断は、特別に実行されていないのが現状であり、喚起支援を受ける必要がある状況から外れた際にも場合によっては喚起支援が継続し、運転者にわずらわしさを与えてしまう虞があった。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−243065号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は上記状況に鑑みてなされたもので、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合等、喚起支援を受ける必要がある状況から外れた際には、速やかに喚起支援を終了させることができる運転支援システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するための請求項1に係る本発明の運転支援システムは、走行路側からの機器により送信される走行路の状況情報を受信する受信手段と、自車両の進行状況を認識する自車両認識手段と、前記受信手段からの情報及び前記自車両認識手段の情報に基づいて前記自車両が当該路で遭遇すると予想される状況を総合的に判断する判断手段と、前記判断手段により判断された状況を運転者に注意喚起する喚起手段とを備え、前記判断手段は、前記運転者の意思に基づいて前記自車両が前記喚起手段で注意喚起される必要がない状態にされたことを認識した時に、前記喚起手段による注意喚起を停止させる退出判断機能を有していることを特徴とする。
【0010】
請求項1に係る本発明では、運転者の意思に基づいて自車両が支援システムの対象走行路から外れたことを認識した時に、退出判断機能により喚起手段の注意喚起を停止させるので、支援の必要がない状況になった際に速やかに支援を終了させることができる。この時、支援の中止を運転者が認識することで、支援のない状態で細心の注意を払った運転を実行することができる。
【0011】
判断手段により判断される状況は、路車間通信により、右折時の対向車の認知、右左折時の歩行者の認知、交差点での進入車両の認知、前方カーブ先等の信号機や一時停止規制、渋滞の認知、左折時の後続二輪車の認知等が挙げられる。喚起手段による注意喚起は、ランプ点灯や画像、音等の表示が挙げられる。
【0012】
そして、請求項2に係る本発明の運転支援システムは、請求項1に記載の運転支援システムにおいて、前記退出判断機能は、前記当該路から非直線状に逸れた走行路に前記自車両が移動されたことを判断する機能であることを特徴とする。
【0013】
請求項2に係る本発明では、支援を受ける当該路が直線状態の場合には、当該路から曲がった横道等(退出路)に自車両が逸れた際に喚起手段の注意喚起が停止され、支援を受ける当該路が曲がった状態の場合には、当該路を曲がらず直進する道路等(退出路)に自車両が逸れた際に喚起手段の注意喚起が停止される。
【0014】
また、請求項3に係る本発明の運転支援システムは、請求項2に記載の運転支援システムにおいて、前記判断手段には、前記自車両認識手段からの情報として、ステアリングホイールの操舵角を検出するハンドル角センサ及び前記車速を検出する車速センサの情報が送られ、前記退出判断機能は、前記当該路から逸れた前記走行路までの到達距離が所定距離以下になった際に、前記車速センサが所定速度以下の車速を検出し、前記ハンドル角センサが所定角度以上の操舵を検出したことを条件に、前記自車両が前記走行路に逸れたと判断して前記喚起手段による注意喚起を停止させることを特徴とする。
【0015】
請求項3に係る本発明では、走行路の線形情報から外れる状態の所定のハンドル角、及び走行路を走行する状態での車速に対して所定の車速以下になったことが検出された際に、自車両が退出路に逸れたと判断され、実際の走行状況に応じて喚起手段の注意喚起を停止させることができる。
【0016】
また、請求項4に係る本発明の運転支援システムは、請求項3に記載の運転支援システムにおいて、前記判断手段には、前記自車両認識手段からの情報として、ターンシグナルの操作状況を検出するターンシグナル検出手段及びブレーキ操作を検出するブレーキ検出手段の情報が更に送られ、前記退出判断機能は、前記自車両が前記走行路に逸れたと判断する条件として、前記ターンシグナル検出手段がターンシグナルの操作を検出し、前記ブレーキ検出手段がブレーキ操作を検出したことを含むことを特徴とする。
【0017】
請求項4に係る本発明では、更に、ブレーキ操作を検出すると共にターンシグナルの操作が検出された際に、自車両が退出路に逸れたと判断され、実際の走行状況に応じた当該路からの退出を確実に判断することができる。
【0018】
また、請求項5に係る本発明の運転支援システムは、請求項1から請求項4のいずれか一項に記載の運転支援システムにおいて、前記走行路側の前記機器により送信される前記走行路の状況情報は、光ビーコンの状況情報であることを特徴とする。また、請求項6に係る本発明の運転支援システムは、請求項5に記載の運転支援システムにおいて、前記走行路側の情報は、信号機の情報、規制情報、道路線形情報、交差点での車両・歩行者情報の少なくとも一つであることを特徴とする。
【0019】
請求項5及び請求項6の本発明では、指向性に優れた光ビーコンによる無線通信により、信号機の情報、規制情報、道路線形情報、交差点での車両・歩行者情報等を得て、右折時の対向車、右左折時の歩行者、交差点での進入車両、前方カーブ先等の信号機や一時停止規制、渋滞、左折時の後続二輪車、等を認知し、必要な注意喚起を実行する支援システムに適用することができる。
【0020】
つまり、右折時の対向直進車両の状況、交差点での出会いがしらで対峙する車両の状況、一時停止交差点の状況、歩行者が存在する交差点の状況、左折時に後方からの二輪車両の状況を認知して、必要な注意喚起を実行する支援システムに適用することができる。
【発明の効果】
【0021】
本発明の運転支援システムは、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合等、喚起支援を受ける必要がある状況から外れた際には、速やかに喚起支援を終了させることが可能になる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態例に係る運転支援システムの概念図である。
【図2】本発明の一実施例に係る運転支援システムのブロック構成図である。
【図3】運転支援システムの具体例を表す概念図である。
【図4】運転支援システムの具体例を表す概念図である。
【図5】運転支援システムの具体例を表す概念図である。
【図6】運転支援システムの処理フローチャートである。
【図7】自車両の状況を説明する平面図である。
【図8】運転支援システムの処理フローチャートである。
【図9】自車両の状況を説明する平面図である。
【発明を実施するための形態】
【0023】
図1、図2に基づいて本発明の一実施例に係る運転支援システムを説明する。また、図3から図5に基づいて自車両1が遭遇すると予想される状況を説明する。
【0024】
図1には本発明の一実施例に係る運転支援システムの概略系統を表す概念、図2には本発明の一実施例に係る運転支援システムの制御を説明するブロック構成を示してある。
【0025】
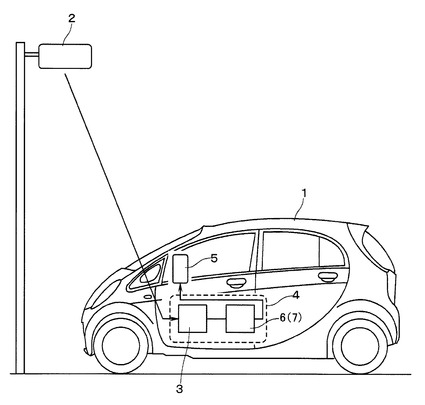
図1に示すように、本実施例の運転支援システムは、自車両1を運転する運転者の認知、判断の遅れ、誤りによる交通事故を未然に防止するためのものであり、信号情報、道路線形情報、他車両の位置、歩行者の位置等、自車両1が入手することができない情報を路側の機器である光ビーコン2から光ビーコン受信部(受信部)3を介して入手している。つまり、路側の光ビーコン2と自車両1の受信部3との間で路車間通信が行われる。
【0026】
光ビーコン2から入手した情報は受信部3から制御機器4に送られ、自車両1の走行状況を基に自車両1が遭遇すると予想される状況が制御機器4で総合的に判断される(判断手段)。制御機器4では、必要に応じて、信号機の情報、一時停止規制の情報、他車両の状況情報、歩行者の状況情報をカーナビ部5に表示させ(運転支援)、運転者に注意を喚起する(喚起手段)。
【0027】
尚、喚起手段としては、車内に複数の点灯ランプ及び音声発信装置を設け、点灯ランプの点灯制御と音声による注意喚起を組み合わせる手段等を用いることができる。
【0028】
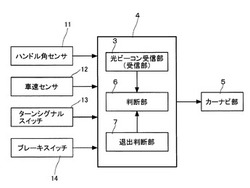
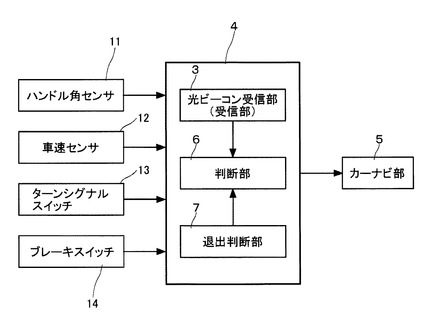
図2に示すように、制御機器4には受信部3が備えられ、受信部3で受信した情報は判断手段としての判断部6に送られ、判断部6では自車両1が遭遇すると予想される状況が判断される。また、制御機器4には、自車両1の進行状況を認識する自車両認識手段として種々の走行情報が入力され、自車両1が遭遇すると予想される状況が判断される。
【0029】
自車両認識手段として、例えば、ステアリングホイールの操舵角を検出するハンドル角センサ11、車速を検出する車速センサ12、ターンシグナルの操作状況を検出するターンシグナルスイッチ(ターンシグナルSW)13、ブレーキ操作を検出するブレーキスイッチ(ブレーキSW)14の情報が入力される。
【0030】
判断部6で自車両1が遭遇すると予想される状況は、例えば、図3から図5に示した状況が適用される。
【0031】
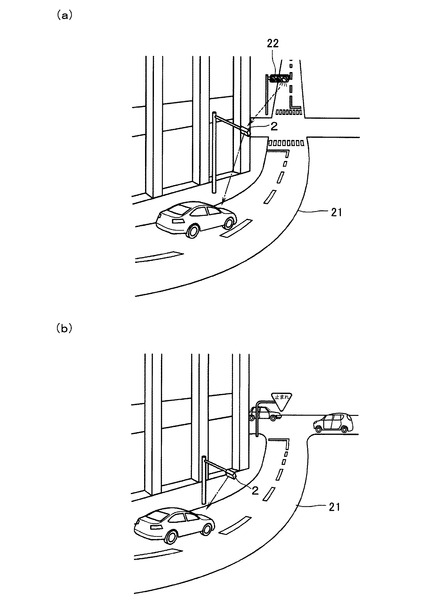
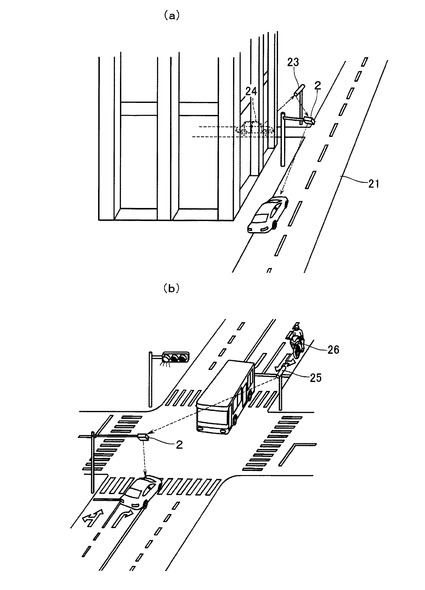
図3(a)に示した状況は、当該路21の先に存在する信号機22の情報が光ビーコン2を介して受信部3に送られ、赤信号等の情報を運転者に知らせて信号の見落としを防止している状況である。
【0032】
図3(b)に示した状況は、当該路21の先に存在する一時停止規制の情報が光ビーコン2を介して受信部3に送られ、一時停止標識や停止線の情報を運転者に知らせて標識等の見落としを防止している状況である。
【0033】
図4(a)に示した状況は、信号機のない交差点に設置された路側センサ23で車両24の進入が検出された際に、交差する車両24の位置・速度の情報が光ビーコン2を介して受信部3に送られ、交差点に接近する車両24の情報を運転者に知らせて出会いがしらの衝突をなくしている状況である。
【0034】
図4(b)に示した状況は、交差点を右折する際に、交差点に設置された路側センサ25で直進車両26の進入が検出された際に、直進車両26の位置・速度の情報が光ビーコン2を介して受信部3に送られ、直進車両26の情報を運転者に知らせて右折時の直進車両26との衝突をなくしている状況である。
【0035】
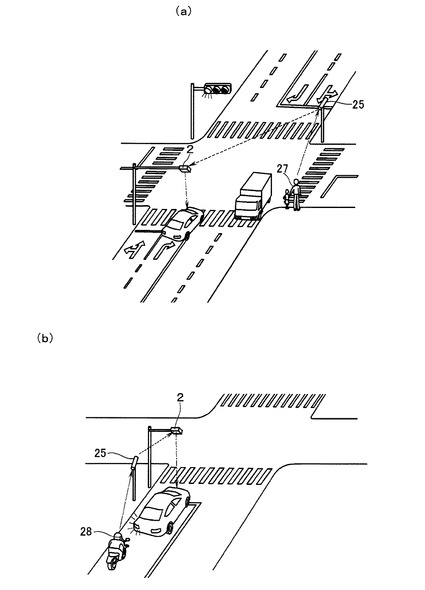
図5(a)に示した状況は、交差点を右折(左折)する際に、交差点に設置された路側センサ25で歩行者27の状況が検出された際に、横断する歩行者27存在の情報が光ビーコン2を介して受信部3に送られ、歩行者27の情報を運転者に知らせて横断歩道通過時に歩行者27との衝突をなくしている状況である。
【0036】
図5(b)に示した状況は、交差点を左折する際に、交差点に設置された路側センサ25で後続の二輪車28の接近が検出された際に、二輪車28の位置・速度の情報が光ビーコン2を介して受信部3に送られ、後続の二輪車28の情報を運転者に知らせて左折時の巻き込みをなくしている状況である。
【0037】
このように、自車両1が遭遇すると予想される状況が制御機器4で判断され、信号機22の情報、一時停止規制の情報、他の車両24の進入状況、歩行者27の状況、後続の二輪車28の状況をカーナビ部5に表示させ、運転者に注意を喚起することができる。
【0038】
図2のブロック構成に戻り、制御機器4には退出判断機能としての退出判断部7が備えられている。退出判断部7では、運転者の意思に基づいて自車両1が当該路21から逸れる状態に運転され、信号機22の情報、一時停止規制の情報、他の車両24の状況、歩行者27の状況、後続の二輪車28の状況をカーナビ部5に表示さる必要がない状態(喚起手段で注意喚起される必要がない状態)になった時に、カーナビ部5での表示を停止させるように判断部6に停止情報を送る。
【0039】
喚起手段で注意喚起される必要がない状態は、例えば、運転支援をする当該路21が直線状で、当該路21からわき道に逸れる状態に自車両1を旋回(右左折)させた場合や、運転支援をする当該路21がカーブの道で、当該路21を曲がらずに自車両1を直進させた場合が挙げられる。また、当該路21の注意喚起箇所に至る前に路肩に駐車して当該路21から時間的に逸れた場合や、当該路21の脇にある商店やガソリンスタンドに入って当該路21から逸れた場合が考えられる。
【0040】
運転者の意思に基づいて自車両1が支援システムの対象走行路から外れたことを認識した時に、退出判断部7によりカーナビ部5での表示を停止させるように判断部6に停止情報を送り、カーナビ部5での表示を停止させるので、運転支援の必要がない状況になった際に速やかに運転支援を終了させることができる。この時、運転者は運転支援の中止を認識することができ、運転支援がない状態を認識して細心の注意を払った運転を実行することができる。
【0041】
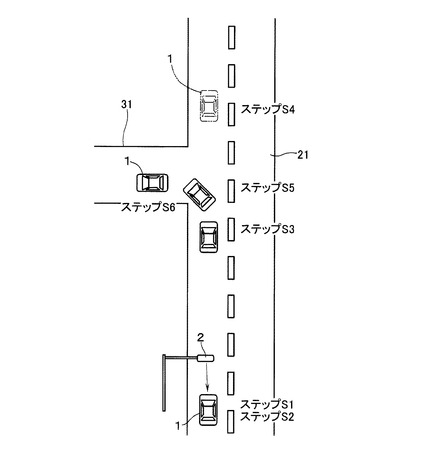
運転者の意思に基づいて自車両1が当該路21から逸れる状態における具体的な判断を図6から図9に基づいて説明する。図に示した例は、直線状の当該路21に対し、交差するわき道(退出路)に自車両1が退出した場合を例に挙げて説明してある。
【0042】
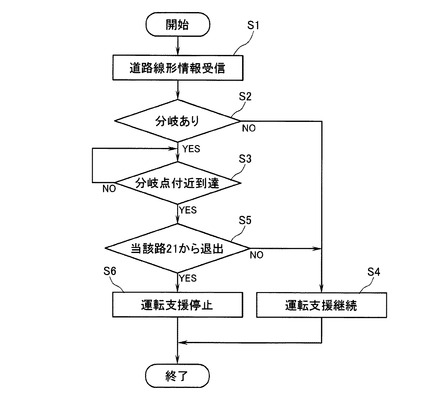
図6には自車両1が当該路21から逸れた状況の判断の処理フロー、図7にはその時の自車両1の走行状況を表す概念を示してある。
【0043】
図に示すように、ステップS1で光ビーコン2から道路線形情報を受信し、受信した情報に基づいてステップS2で退出路31の分岐があるか否かが判断される。ステップS2で退出路31の分岐がないと判断された場合、ステップS4に移行して自車両1に対する支援システムを継続して終了する。ステップS2で退出路31の分岐があると判断された場合、ステップS3で分岐点付近に到達したか否かの判断が繰り返される。
【0044】
分岐点付近に到達したか否かは、例えば、退出路31が分岐する場所(分岐点)の、5m手前までの残り距離を演算し、残り距離が分岐点の5m手前までの距離以下になった場合、分岐点付近に到達したと判断される。尚、分岐点付近に到達したか否かの判断は、時間の経過で判断する等、他のパラメータに基づいて判断することも可能である。
【0045】
ステップS3で分岐点付近に到達したと判断された場合、ステップS5で当該路21から自車両1が退出したか否かが判断され、当該路21から自車両1が退出していないと判断された場合、ステップS4に移行して自車両1に対する支援システムを継続して終了する。ステップS5における当該路21からの自車両1の退出の判断は、後述するように、図8、図9で具体的に説明する。
【0046】
ステップS5で当該路21から自車両1が退出したと判断された場合、運転者の意思に基づいて自車両1がわき道(退出路31)に退出されたと判断され、周囲の状況をカーナビ部5に表示させる必要がない状態(喚起手段で注意喚起される必要がない状態)になったとしてステップS6で運転支援を停止して終了する。つまり、カーナビ部5での周囲の状況の表示を停止させるように判断部6に停止情報が送られる。
【0047】
このため、当該路21から曲がったわき道(退出路31)に自車両1が逸れた際にカーナビ部5での周囲の状況の表示が停止され、運転支援の必要がない状況になった際に速やかに運転支援を終了させることができる。
【0048】
図8、図9に基づいて、ステップS5における当該路21からの自車両1の退出の判断例を具体的に説明する。
【0049】
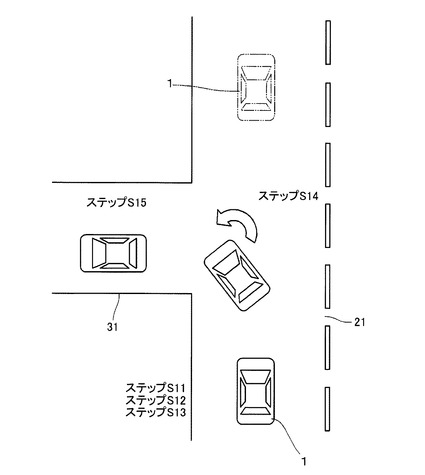
図8には自車両1が当該路21から逸れる状況を判断する処理フロー、図9にはその時の自車両1の挙動を表す概念を示してある。
【0050】
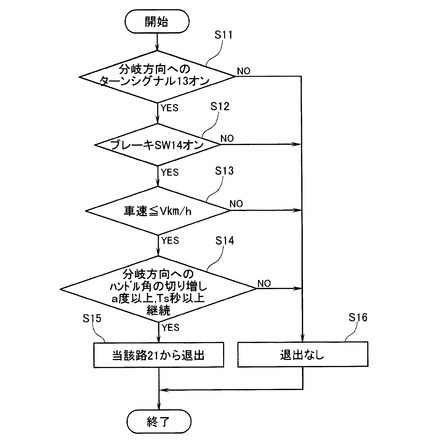
図8に示すように、ステップS11で退出路31方向へのターンシグナルSW13がオンになったか否かが判断され、ステップS11でターンシグナルSW13がオンであると判断された場合、ステップS12でブレーキSW14がオンであるか否かが判断される。ステップS12でブレーキSW14がオンであると判断された場合、ステップS13で車速がVKm/h(例えば、20Km/h)以下であるか否かが判断される。
【0051】
ステップS13で車速がVKm/h以下であると判断された場合、ステップS14で分岐方向(図9中左方向)へのハンドル角の切り増しがa度以上でその状態がTs秒以上継続しているか否かが判断される。ステップS14でTs秒以上の間、ハンドル角の切り増しがa度以上の状態が継続していると判断された場合、ステップS15で当該路21から自車両1が退出したとして終了する(図6のステップS5に戻る)。
【0052】
ステップS11、ステップS12、ステップS13、ステップS14のいずれかで否である(NO)と判断された場合、ステップS16で当該路21から自車両1が退出していない(退出なし)として終了する(図6のステップS5に戻る)。
【0053】
このため、当該路21の線形情報から外れる状態の所定のハンドル角、及び当該路21を走行する状態での車速に対して所定の車速以下になったことが検出された際に、自車両1が退出路31に逸れたと判断され、実際の走行状況に応じて周囲の状況をカーナビ部5に表示させる必要がない状態を判断して運転支援を停止することができる。また、ブレーキ操作を検出すると共にターンシグナルの操作が検出された際に、周囲の状況をカーナビ部5に表示させる必要がない状態を判断しているので、当該路21からの退出を確実に判断することができる。
【0054】
上述した運転支援システムは、運転支援を受ける対象の当該路21から自車両1が退出路31に逸れた場合や運転支援を受ける交差点や規制箇所に到達する前に自車両1を停車させた場合等、運転支援の状況をカーナビ部5に表示させる必要がない状態になった際(表示の必要がある状況から外れた際)には、速やかにカーナビ部5での表示(音声・ランプ等での表示)を終了させることができる。
【産業上の利用可能性】
【0055】
本発明は、走行路の状況情報及び車両の走行状況情報に応じて、車両が遭遇すると予想される状況を総合的に判断し、遭遇すると予想される状況に対する注意を運転者に喚起する運転支援システムの産業分野で利用することができる。
【符号の説明】
【0056】
1 自車両
2 光ビーコン
3 受信部
4 制御機器
5 カーナビ部
6 判断部
7 退出判断部
11 ハンドル角センサ
12 車速センサ
13 ターンシグナルスイッチ(ターンシグナルSW)
14 ブレーキスイッチ(ブレーキSW)
21 当該路
22 信号機
23、25 路側センサ
24 車両
26 直進車両
27 歩行者
28 二輪車
31 退出路
【技術分野】
【0001】
本発明は、走行路の状況情報及び車両の走行状況情報に応じて、車両が遭遇すると予想される状況を総合的に判断し、遭遇すると予想される状況に対する注意を運転者に喚起する運転支援システムに関する。
【背景技術】
【0002】
車両を運転する運転者の認知、判断の遅れ、誤りによる交通事故を未然に防止するための運転支援システムが従来から知られている。運転支援システムは、信号情報、道路線形情報、他車両の位置、歩行者の位置等、車両が入手することができない情報を路側の機器から入手し、入手した情報と自車両の走行状況とを基に車両が遭遇すると予想される状況を車載機器で総合的に判断し、必要に応じて、遭遇すると予想される状況に対する注意を最適なタイミングで運転者に喚起するシステムである。
【0003】
例えば、左側走行規制の道路を走行中に、無線通信(光ビーコン)により路側の機器からの情報を入手し、例えば、交差点で右折する際の直進車両の接近を判断し、運転者に接近の認知を喚起して右折可能・不可能の判断を支援するシステムが従来から知られている(例えば、特許文献1参照)。従来の技術によると、遭遇すると予想される状況に対して運転操作を効果的に支援することができる。
【0004】
運転支援システムは、特許文献1で示された右折時の直進車両の認知支援の他に、右左折時の歩行者の認知、交差点での進入車両の認知、前方カーブ先等の信号機や一時停止規制、渋滞の認知、左折時の後続二輪車の認知等を喚起することが実施されている。運転支援システムでは、走行路の状況情報及び車両の走行状況情報に応じて、車両が遭遇すると予想される状況が総合的に判断され、遭遇すると予想される状況に対する注意を必要に応じて運転者に喚起することができる。
【0005】
従来から提案されている運転支援システムは、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合、状況によっては、遭遇すると予想される状況に対する注意の喚起が継続し、音やランプ、画像等で注意の喚起が継続することが考えられる。
【0006】
しかし、従来から提案されている運転支援システムでは、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合の判断は、特別に実行されていないのが現状であり、喚起支援を受ける必要がある状況から外れた際にも場合によっては喚起支援が継続し、運転者にわずらわしさを与えてしまう虞があった。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−243065号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は上記状況に鑑みてなされたもので、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合等、喚起支援を受ける必要がある状況から外れた際には、速やかに喚起支援を終了させることができる運転支援システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するための請求項1に係る本発明の運転支援システムは、走行路側からの機器により送信される走行路の状況情報を受信する受信手段と、自車両の進行状況を認識する自車両認識手段と、前記受信手段からの情報及び前記自車両認識手段の情報に基づいて前記自車両が当該路で遭遇すると予想される状況を総合的に判断する判断手段と、前記判断手段により判断された状況を運転者に注意喚起する喚起手段とを備え、前記判断手段は、前記運転者の意思に基づいて前記自車両が前記喚起手段で注意喚起される必要がない状態にされたことを認識した時に、前記喚起手段による注意喚起を停止させる退出判断機能を有していることを特徴とする。
【0010】
請求項1に係る本発明では、運転者の意思に基づいて自車両が支援システムの対象走行路から外れたことを認識した時に、退出判断機能により喚起手段の注意喚起を停止させるので、支援の必要がない状況になった際に速やかに支援を終了させることができる。この時、支援の中止を運転者が認識することで、支援のない状態で細心の注意を払った運転を実行することができる。
【0011】
判断手段により判断される状況は、路車間通信により、右折時の対向車の認知、右左折時の歩行者の認知、交差点での進入車両の認知、前方カーブ先等の信号機や一時停止規制、渋滞の認知、左折時の後続二輪車の認知等が挙げられる。喚起手段による注意喚起は、ランプ点灯や画像、音等の表示が挙げられる。
【0012】
そして、請求項2に係る本発明の運転支援システムは、請求項1に記載の運転支援システムにおいて、前記退出判断機能は、前記当該路から非直線状に逸れた走行路に前記自車両が移動されたことを判断する機能であることを特徴とする。
【0013】
請求項2に係る本発明では、支援を受ける当該路が直線状態の場合には、当該路から曲がった横道等(退出路)に自車両が逸れた際に喚起手段の注意喚起が停止され、支援を受ける当該路が曲がった状態の場合には、当該路を曲がらず直進する道路等(退出路)に自車両が逸れた際に喚起手段の注意喚起が停止される。
【0014】
また、請求項3に係る本発明の運転支援システムは、請求項2に記載の運転支援システムにおいて、前記判断手段には、前記自車両認識手段からの情報として、ステアリングホイールの操舵角を検出するハンドル角センサ及び前記車速を検出する車速センサの情報が送られ、前記退出判断機能は、前記当該路から逸れた前記走行路までの到達距離が所定距離以下になった際に、前記車速センサが所定速度以下の車速を検出し、前記ハンドル角センサが所定角度以上の操舵を検出したことを条件に、前記自車両が前記走行路に逸れたと判断して前記喚起手段による注意喚起を停止させることを特徴とする。
【0015】
請求項3に係る本発明では、走行路の線形情報から外れる状態の所定のハンドル角、及び走行路を走行する状態での車速に対して所定の車速以下になったことが検出された際に、自車両が退出路に逸れたと判断され、実際の走行状況に応じて喚起手段の注意喚起を停止させることができる。
【0016】
また、請求項4に係る本発明の運転支援システムは、請求項3に記載の運転支援システムにおいて、前記判断手段には、前記自車両認識手段からの情報として、ターンシグナルの操作状況を検出するターンシグナル検出手段及びブレーキ操作を検出するブレーキ検出手段の情報が更に送られ、前記退出判断機能は、前記自車両が前記走行路に逸れたと判断する条件として、前記ターンシグナル検出手段がターンシグナルの操作を検出し、前記ブレーキ検出手段がブレーキ操作を検出したことを含むことを特徴とする。
【0017】
請求項4に係る本発明では、更に、ブレーキ操作を検出すると共にターンシグナルの操作が検出された際に、自車両が退出路に逸れたと判断され、実際の走行状況に応じた当該路からの退出を確実に判断することができる。
【0018】
また、請求項5に係る本発明の運転支援システムは、請求項1から請求項4のいずれか一項に記載の運転支援システムにおいて、前記走行路側の前記機器により送信される前記走行路の状況情報は、光ビーコンの状況情報であることを特徴とする。また、請求項6に係る本発明の運転支援システムは、請求項5に記載の運転支援システムにおいて、前記走行路側の情報は、信号機の情報、規制情報、道路線形情報、交差点での車両・歩行者情報の少なくとも一つであることを特徴とする。
【0019】
請求項5及び請求項6の本発明では、指向性に優れた光ビーコンによる無線通信により、信号機の情報、規制情報、道路線形情報、交差点での車両・歩行者情報等を得て、右折時の対向車、右左折時の歩行者、交差点での進入車両、前方カーブ先等の信号機や一時停止規制、渋滞、左折時の後続二輪車、等を認知し、必要な注意喚起を実行する支援システムに適用することができる。
【0020】
つまり、右折時の対向直進車両の状況、交差点での出会いがしらで対峙する車両の状況、一時停止交差点の状況、歩行者が存在する交差点の状況、左折時に後方からの二輪車両の状況を認知して、必要な注意喚起を実行する支援システムに適用することができる。
【発明の効果】
【0021】
本発明の運転支援システムは、支援を受ける対象の道路から退出した場合や、支援を受ける交差点や規制箇所に到達する前に車両を停車させた場合等、喚起支援を受ける必要がある状況から外れた際には、速やかに喚起支援を終了させることが可能になる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態例に係る運転支援システムの概念図である。
【図2】本発明の一実施例に係る運転支援システムのブロック構成図である。
【図3】運転支援システムの具体例を表す概念図である。
【図4】運転支援システムの具体例を表す概念図である。
【図5】運転支援システムの具体例を表す概念図である。
【図6】運転支援システムの処理フローチャートである。
【図7】自車両の状況を説明する平面図である。
【図8】運転支援システムの処理フローチャートである。
【図9】自車両の状況を説明する平面図である。
【発明を実施するための形態】
【0023】
図1、図2に基づいて本発明の一実施例に係る運転支援システムを説明する。また、図3から図5に基づいて自車両1が遭遇すると予想される状況を説明する。
【0024】
図1には本発明の一実施例に係る運転支援システムの概略系統を表す概念、図2には本発明の一実施例に係る運転支援システムの制御を説明するブロック構成を示してある。
【0025】
図1に示すように、本実施例の運転支援システムは、自車両1を運転する運転者の認知、判断の遅れ、誤りによる交通事故を未然に防止するためのものであり、信号情報、道路線形情報、他車両の位置、歩行者の位置等、自車両1が入手することができない情報を路側の機器である光ビーコン2から光ビーコン受信部(受信部)3を介して入手している。つまり、路側の光ビーコン2と自車両1の受信部3との間で路車間通信が行われる。
【0026】
光ビーコン2から入手した情報は受信部3から制御機器4に送られ、自車両1の走行状況を基に自車両1が遭遇すると予想される状況が制御機器4で総合的に判断される(判断手段)。制御機器4では、必要に応じて、信号機の情報、一時停止規制の情報、他車両の状況情報、歩行者の状況情報をカーナビ部5に表示させ(運転支援)、運転者に注意を喚起する(喚起手段)。
【0027】
尚、喚起手段としては、車内に複数の点灯ランプ及び音声発信装置を設け、点灯ランプの点灯制御と音声による注意喚起を組み合わせる手段等を用いることができる。
【0028】
図2に示すように、制御機器4には受信部3が備えられ、受信部3で受信した情報は判断手段としての判断部6に送られ、判断部6では自車両1が遭遇すると予想される状況が判断される。また、制御機器4には、自車両1の進行状況を認識する自車両認識手段として種々の走行情報が入力され、自車両1が遭遇すると予想される状況が判断される。
【0029】
自車両認識手段として、例えば、ステアリングホイールの操舵角を検出するハンドル角センサ11、車速を検出する車速センサ12、ターンシグナルの操作状況を検出するターンシグナルスイッチ(ターンシグナルSW)13、ブレーキ操作を検出するブレーキスイッチ(ブレーキSW)14の情報が入力される。
【0030】
判断部6で自車両1が遭遇すると予想される状況は、例えば、図3から図5に示した状況が適用される。
【0031】
図3(a)に示した状況は、当該路21の先に存在する信号機22の情報が光ビーコン2を介して受信部3に送られ、赤信号等の情報を運転者に知らせて信号の見落としを防止している状況である。
【0032】
図3(b)に示した状況は、当該路21の先に存在する一時停止規制の情報が光ビーコン2を介して受信部3に送られ、一時停止標識や停止線の情報を運転者に知らせて標識等の見落としを防止している状況である。
【0033】
図4(a)に示した状況は、信号機のない交差点に設置された路側センサ23で車両24の進入が検出された際に、交差する車両24の位置・速度の情報が光ビーコン2を介して受信部3に送られ、交差点に接近する車両24の情報を運転者に知らせて出会いがしらの衝突をなくしている状況である。
【0034】
図4(b)に示した状況は、交差点を右折する際に、交差点に設置された路側センサ25で直進車両26の進入が検出された際に、直進車両26の位置・速度の情報が光ビーコン2を介して受信部3に送られ、直進車両26の情報を運転者に知らせて右折時の直進車両26との衝突をなくしている状況である。
【0035】
図5(a)に示した状況は、交差点を右折(左折)する際に、交差点に設置された路側センサ25で歩行者27の状況が検出された際に、横断する歩行者27存在の情報が光ビーコン2を介して受信部3に送られ、歩行者27の情報を運転者に知らせて横断歩道通過時に歩行者27との衝突をなくしている状況である。
【0036】
図5(b)に示した状況は、交差点を左折する際に、交差点に設置された路側センサ25で後続の二輪車28の接近が検出された際に、二輪車28の位置・速度の情報が光ビーコン2を介して受信部3に送られ、後続の二輪車28の情報を運転者に知らせて左折時の巻き込みをなくしている状況である。
【0037】
このように、自車両1が遭遇すると予想される状況が制御機器4で判断され、信号機22の情報、一時停止規制の情報、他の車両24の進入状況、歩行者27の状況、後続の二輪車28の状況をカーナビ部5に表示させ、運転者に注意を喚起することができる。
【0038】
図2のブロック構成に戻り、制御機器4には退出判断機能としての退出判断部7が備えられている。退出判断部7では、運転者の意思に基づいて自車両1が当該路21から逸れる状態に運転され、信号機22の情報、一時停止規制の情報、他の車両24の状況、歩行者27の状況、後続の二輪車28の状況をカーナビ部5に表示さる必要がない状態(喚起手段で注意喚起される必要がない状態)になった時に、カーナビ部5での表示を停止させるように判断部6に停止情報を送る。
【0039】
喚起手段で注意喚起される必要がない状態は、例えば、運転支援をする当該路21が直線状で、当該路21からわき道に逸れる状態に自車両1を旋回(右左折)させた場合や、運転支援をする当該路21がカーブの道で、当該路21を曲がらずに自車両1を直進させた場合が挙げられる。また、当該路21の注意喚起箇所に至る前に路肩に駐車して当該路21から時間的に逸れた場合や、当該路21の脇にある商店やガソリンスタンドに入って当該路21から逸れた場合が考えられる。
【0040】
運転者の意思に基づいて自車両1が支援システムの対象走行路から外れたことを認識した時に、退出判断部7によりカーナビ部5での表示を停止させるように判断部6に停止情報を送り、カーナビ部5での表示を停止させるので、運転支援の必要がない状況になった際に速やかに運転支援を終了させることができる。この時、運転者は運転支援の中止を認識することができ、運転支援がない状態を認識して細心の注意を払った運転を実行することができる。
【0041】
運転者の意思に基づいて自車両1が当該路21から逸れる状態における具体的な判断を図6から図9に基づいて説明する。図に示した例は、直線状の当該路21に対し、交差するわき道(退出路)に自車両1が退出した場合を例に挙げて説明してある。
【0042】
図6には自車両1が当該路21から逸れた状況の判断の処理フロー、図7にはその時の自車両1の走行状況を表す概念を示してある。
【0043】
図に示すように、ステップS1で光ビーコン2から道路線形情報を受信し、受信した情報に基づいてステップS2で退出路31の分岐があるか否かが判断される。ステップS2で退出路31の分岐がないと判断された場合、ステップS4に移行して自車両1に対する支援システムを継続して終了する。ステップS2で退出路31の分岐があると判断された場合、ステップS3で分岐点付近に到達したか否かの判断が繰り返される。
【0044】
分岐点付近に到達したか否かは、例えば、退出路31が分岐する場所(分岐点)の、5m手前までの残り距離を演算し、残り距離が分岐点の5m手前までの距離以下になった場合、分岐点付近に到達したと判断される。尚、分岐点付近に到達したか否かの判断は、時間の経過で判断する等、他のパラメータに基づいて判断することも可能である。
【0045】
ステップS3で分岐点付近に到達したと判断された場合、ステップS5で当該路21から自車両1が退出したか否かが判断され、当該路21から自車両1が退出していないと判断された場合、ステップS4に移行して自車両1に対する支援システムを継続して終了する。ステップS5における当該路21からの自車両1の退出の判断は、後述するように、図8、図9で具体的に説明する。
【0046】
ステップS5で当該路21から自車両1が退出したと判断された場合、運転者の意思に基づいて自車両1がわき道(退出路31)に退出されたと判断され、周囲の状況をカーナビ部5に表示させる必要がない状態(喚起手段で注意喚起される必要がない状態)になったとしてステップS6で運転支援を停止して終了する。つまり、カーナビ部5での周囲の状況の表示を停止させるように判断部6に停止情報が送られる。
【0047】
このため、当該路21から曲がったわき道(退出路31)に自車両1が逸れた際にカーナビ部5での周囲の状況の表示が停止され、運転支援の必要がない状況になった際に速やかに運転支援を終了させることができる。
【0048】
図8、図9に基づいて、ステップS5における当該路21からの自車両1の退出の判断例を具体的に説明する。
【0049】
図8には自車両1が当該路21から逸れる状況を判断する処理フロー、図9にはその時の自車両1の挙動を表す概念を示してある。
【0050】
図8に示すように、ステップS11で退出路31方向へのターンシグナルSW13がオンになったか否かが判断され、ステップS11でターンシグナルSW13がオンであると判断された場合、ステップS12でブレーキSW14がオンであるか否かが判断される。ステップS12でブレーキSW14がオンであると判断された場合、ステップS13で車速がVKm/h(例えば、20Km/h)以下であるか否かが判断される。
【0051】
ステップS13で車速がVKm/h以下であると判断された場合、ステップS14で分岐方向(図9中左方向)へのハンドル角の切り増しがa度以上でその状態がTs秒以上継続しているか否かが判断される。ステップS14でTs秒以上の間、ハンドル角の切り増しがa度以上の状態が継続していると判断された場合、ステップS15で当該路21から自車両1が退出したとして終了する(図6のステップS5に戻る)。
【0052】
ステップS11、ステップS12、ステップS13、ステップS14のいずれかで否である(NO)と判断された場合、ステップS16で当該路21から自車両1が退出していない(退出なし)として終了する(図6のステップS5に戻る)。
【0053】
このため、当該路21の線形情報から外れる状態の所定のハンドル角、及び当該路21を走行する状態での車速に対して所定の車速以下になったことが検出された際に、自車両1が退出路31に逸れたと判断され、実際の走行状況に応じて周囲の状況をカーナビ部5に表示させる必要がない状態を判断して運転支援を停止することができる。また、ブレーキ操作を検出すると共にターンシグナルの操作が検出された際に、周囲の状況をカーナビ部5に表示させる必要がない状態を判断しているので、当該路21からの退出を確実に判断することができる。
【0054】
上述した運転支援システムは、運転支援を受ける対象の当該路21から自車両1が退出路31に逸れた場合や運転支援を受ける交差点や規制箇所に到達する前に自車両1を停車させた場合等、運転支援の状況をカーナビ部5に表示させる必要がない状態になった際(表示の必要がある状況から外れた際)には、速やかにカーナビ部5での表示(音声・ランプ等での表示)を終了させることができる。
【産業上の利用可能性】
【0055】
本発明は、走行路の状況情報及び車両の走行状況情報に応じて、車両が遭遇すると予想される状況を総合的に判断し、遭遇すると予想される状況に対する注意を運転者に喚起する運転支援システムの産業分野で利用することができる。
【符号の説明】
【0056】
1 自車両
2 光ビーコン
3 受信部
4 制御機器
5 カーナビ部
6 判断部
7 退出判断部
11 ハンドル角センサ
12 車速センサ
13 ターンシグナルスイッチ(ターンシグナルSW)
14 ブレーキスイッチ(ブレーキSW)
21 当該路
22 信号機
23、25 路側センサ
24 車両
26 直進車両
27 歩行者
28 二輪車
31 退出路
【特許請求の範囲】
【請求項1】
走行路側からの機器により送信される走行路の状況情報を受信する受信手段と、
自車両の進行状況を認識する自車両認識手段と、
前記受信手段からの情報及び前記自車両認識手段の情報に基づいて前記自車両が当該路で遭遇すると予想される状況を総合的に判断する判断手段と、
前記判断手段により判断された状況を運転者に注意喚起する喚起手段とを備え、
前記判断手段は、
前記運転者の意思に基づいて前記自車両が前記喚起手段で注意喚起される必要がない状態にされたことを認識した時に、前記喚起手段による注意喚起を停止させる退出判断機能を有している
ことを特徴とする運転支援システム。
【請求項2】
請求項1に記載の運転支援システムにおいて、
前記退出判断機能は、
前記当該路から非直線状に逸れた走行路に前記自車両が移動されたことを判断する機能である
ことを特徴とする運転支援システム。
【請求項3】
請求項2に記載の運転支援システムにおいて、
前記判断手段には、
前記自車両認識手段からの情報として、ステアリングホイールの操舵角を検出するハンドル角センサ及び車速を検出する車速センサの情報が送られ、
前記退出判断機能は、
前記当該路から逸れた前記走行路までの到達距離が所定距離以下になった際に、前記車速センサが所定速度以下の車速を検出し、前記ハンドル角センサが所定角度以上の操舵を検出したことを条件に、前記自車両が前記走行路に逸れたと判断して前記喚起手段による注意喚起を停止させる
ことを特徴とする運転支援システム。
【請求項4】
請求項3に記載の運転支援システムにおいて、
前記判断手段には、
前記自車両認識手段からの情報として、ターンシグナルの操作状況を検出するターンシグナル検出手段及びブレーキ操作を検出するブレーキ検出手段の情報が更に送られ、
前記退出判断機能は、
前記自車両が前記走行路に逸れたと判断する条件として、前記ターンシグナル検出手段がターンシグナルの操作を検出し、前記ブレーキ検出手段がブレーキ操作を検出したことを含む
ことを特徴とする運転支援システム。
【請求項5】
請求項1から請求項4のいずれか一項に記載の運転支援システムにおいて、
前記走行路側の前記機器により送信される前記走行路の状況情報は、光ビーコンの状況情報である
ことを特徴とする運転支援システム。
【請求項6】
請求項5に記載の運転支援システムにおいて、
前記走行路側の情報は、
信号機の情報、規制情報、道路線形情報、交差点での車両・歩行者情報の少なくとも一つである
ことを特徴とする運転支援システム。
【請求項1】
走行路側からの機器により送信される走行路の状況情報を受信する受信手段と、
自車両の進行状況を認識する自車両認識手段と、
前記受信手段からの情報及び前記自車両認識手段の情報に基づいて前記自車両が当該路で遭遇すると予想される状況を総合的に判断する判断手段と、
前記判断手段により判断された状況を運転者に注意喚起する喚起手段とを備え、
前記判断手段は、
前記運転者の意思に基づいて前記自車両が前記喚起手段で注意喚起される必要がない状態にされたことを認識した時に、前記喚起手段による注意喚起を停止させる退出判断機能を有している
ことを特徴とする運転支援システム。
【請求項2】
請求項1に記載の運転支援システムにおいて、
前記退出判断機能は、
前記当該路から非直線状に逸れた走行路に前記自車両が移動されたことを判断する機能である
ことを特徴とする運転支援システム。
【請求項3】
請求項2に記載の運転支援システムにおいて、
前記判断手段には、
前記自車両認識手段からの情報として、ステアリングホイールの操舵角を検出するハンドル角センサ及び車速を検出する車速センサの情報が送られ、
前記退出判断機能は、
前記当該路から逸れた前記走行路までの到達距離が所定距離以下になった際に、前記車速センサが所定速度以下の車速を検出し、前記ハンドル角センサが所定角度以上の操舵を検出したことを条件に、前記自車両が前記走行路に逸れたと判断して前記喚起手段による注意喚起を停止させる
ことを特徴とする運転支援システム。
【請求項4】
請求項3に記載の運転支援システムにおいて、
前記判断手段には、
前記自車両認識手段からの情報として、ターンシグナルの操作状況を検出するターンシグナル検出手段及びブレーキ操作を検出するブレーキ検出手段の情報が更に送られ、
前記退出判断機能は、
前記自車両が前記走行路に逸れたと判断する条件として、前記ターンシグナル検出手段がターンシグナルの操作を検出し、前記ブレーキ検出手段がブレーキ操作を検出したことを含む
ことを特徴とする運転支援システム。
【請求項5】
請求項1から請求項4のいずれか一項に記載の運転支援システムにおいて、
前記走行路側の前記機器により送信される前記走行路の状況情報は、光ビーコンの状況情報である
ことを特徴とする運転支援システム。
【請求項6】
請求項5に記載の運転支援システムにおいて、
前記走行路側の情報は、
信号機の情報、規制情報、道路線形情報、交差点での車両・歩行者情報の少なくとも一つである
ことを特徴とする運転支援システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−118622(P2011−118622A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−274861(P2009−274861)
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]