
運転支援方法及び運転支援装置
【課題】適切でない運転操作の繰り返しを防ぐ運転支援方法及び運転支援装置を提供する。
【解決手段】自車両に搭載される運転支援装置において、自車両に接近した他車両に関する急減速報知データを取得する通信部13と、急減速報知データに基づき、他車両が急減速したか否かを判断する制御部3と、他車両が急減速したときに、そのときの自車両及び他車両に関する履歴データ18を記憶する履歴記憶部17とを備えた。制御部3は、履歴データ18を履歴記憶部17に記憶した後、自車両の各時点の状況と、各履歴データとを比較し、類似性を判断する。また、蓄積された履歴データ18のうち、自車両のそのときの状況と類似する履歴データ18があると判断した際に、音声プロセッサ19を制御して、音声を出力する。
【解決手段】自車両に搭載される運転支援装置において、自車両に接近した他車両に関する急減速報知データを取得する通信部13と、急減速報知データに基づき、他車両が急減速したか否かを判断する制御部3と、他車両が急減速したときに、そのときの自車両及び他車両に関する履歴データ18を記憶する履歴記憶部17とを備えた。制御部3は、履歴データ18を履歴記憶部17に記憶した後、自車両の各時点の状況と、各履歴データとを比較し、類似性を判断する。また、蓄積された履歴データ18のうち、自車両のそのときの状況と類似する履歴データ18があると判断した際に、音声プロセッサ19を制御して、音声を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援方法及び運転支援装置に関する。
【背景技術】
【0002】
近年、自動車の円滑な走行を図るために、高度道路交通システムの開発が進められている。このシステムの一環として、車両周辺状況に応じて警告を行うシステムが提案されている。例えば、特許文献1には、車車間通信及び車両検出センサによって、自車両周辺を走行する他車両の走行状態を受信及び検出するシステムが記載されている。このシステムは、他車両が急ブレーキ又は車線変更等、自車両の走行に影響を与える走行を行った際に、自車両のドライバーに対して警告表示をディスプレイに表示して、注意を喚起したり、自車両を自動制御する。
【特許文献1】特開2005−50187号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
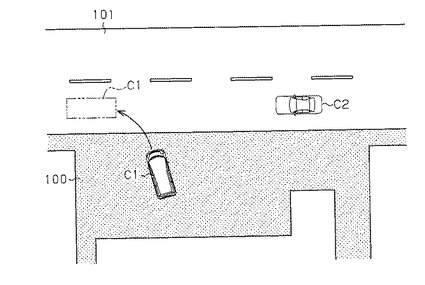
しかし、上記したシステムでは、他車両に対する注意を喚起できるものの、不適切な運転を行ったドライバーに対して警告を与えることはできない。例えば、図14に示すように、他車両C2が自車両C1に接近しているにも関わらず、自車両C1が道路脇の敷地100から車道101内に矢印方向に沿って進入した場合、車間距離が短くなり、他車両C2はやむを得ず急ブレーキをかける。このように、他車両C2が急ブレーキをかけた原因が自車両C1にあるとしても、上記したシステムでは、自車両C1のドライバーの注意を喚起することはできない。実際には、不適切な運転を行うドライバーは、その運転操作が適切でないことを認識しないか、判らないことが多く、同じような状況において不適切な運転を繰り返す可能性が高い。
【0004】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、適切でない運転操作の繰り返しを防ぐ運転支援方法及び運転支援装置を提供することにある。
【課題を解決するための手段】
【0005】
上記問題点を解決するために、請求項1に記載の発明は、自車両の運転者の運転を支援する運転支援方法において、前記自車両に接近した他車両に関する他車両情報を取得し、前記他車両情報に基づき、前記他車両が急減速したと判断した際に、前記自車両及び前記他車両に関する走行履歴情報を履歴記憶手段に記憶するとともに、前記自車両及び前記他車両の現在状況と前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を促すことを要旨とする。
【0006】
請求項2に記載の発明は、自車両に搭載される運転支援装置において、前記自車両に接近した他車両に関する他車両情報を取得する取得手段と、前記他車両情報に基づき、前記他車両が急減速したか否かを判断する判断手段と、前記他車両が急減速したと判断した際に、そのときの前記自車両及び前記他車両に関する走行履歴情報を記憶する履歴記憶手段と、前記自車両及び前記他車両の現在状況と、前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、類似性を判断する比較手段と、前記比較手段が、蓄積された前記各走行履歴情報のうち、前記自車両及び前記他車両の現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を喚起する報知手段とを備えることを要旨とする。
【0007】
請求項3に記載の発明は、請求項2に記載の運転支援装置において、前記取得手段は、前記他車両情報を車車間通信により取得する通信手段をさらに備えたことを要旨とする。
請求項4に記載の発明は、請求項2又は3に記載の運転支援装置において、前記報知手段による報知が実行された後の前記運転者の運転操作が適切であるか否かを判断し、次回から同じ状況下での報知を続行するか否かを決定する結果判断手段をさらに備えたことを要旨とする。
【発明の効果】
【0008】
請求項1に記載の発明によれば、自車両に接近した他車両が急減速した際に、自車両及び他車両に関する走行履歴情報を記憶する。また、自車両が走行している間、各時点の自車両の現在状況と走行履歴情報とを比較し、類似している走行履歴情報がある場合には、運転者の注意を促す。従って、接近する他車両が急減速するような、不適切な運転を再び行うことを未然に防ぐことができる。
【0009】
請求項2に記載の発明によれば、自車両に接近した他車両が急減速した際に、自車両及び他車両に関する走行履歴情報を記憶する。また、自車両が走行している間、各時点の自車両の現在状況と走行履歴情報とを比較し、類似している走行履歴情報がある場合には、運転者の注意を促す。従って、接近する他車両が急減速するような、不適切な運転を再び行うことを未然に防ぐことができる。
【0010】
請求項3に記載の発明によれば、取得手段は、他車両情報を車車間通信により取得する。このため、他車両によって検出された正確なデータを用いることができるため、精度の高い走行履歴情報を蓄積することができる。
【0011】
請求項4に記載の発明によれば、報知を行った後の運転操作が適切であるか否かが判断される。このため、例えば、運転操作が適切である場合に、次回からの報知を実行せず、運転者に煩わしさを感じさせないようにすることができる。また、適切でない場合には、繰り返し報知を行うことによって、適切な運転を支援することができる。
【発明を実施するための最良の形態】
【0012】
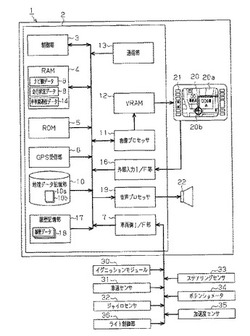
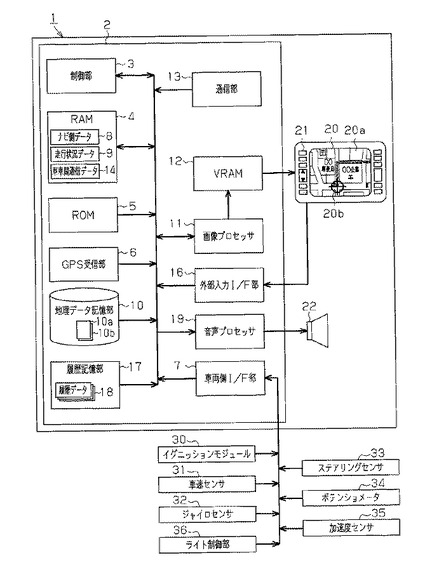
以下、本発明の運転支援装置を具体化した実施形態を図1〜図13に従って説明する。図1は、自動車(車両)に搭載された運転支援システム1の構成を説明するブロック図である。
【0013】
図1に示すように、自車両C1(図7参照)に搭載された運転支援システム1は、運転支援装置としての制御装置2と、各種画面を表示するディスプレイ20及び出力手段としてのスピーカ22を備えている。制御装置2は、主制御を行い、CPU等からなる、判断手段、比較手段、報知手段及び結果判断手段としての制御部3と、制御部3の演算結果を一時記憶するRAM4と、運転支援プログラム等、各種プログラムを記憶するROM5と、GPS受信部6とを備えている。制御部3は、GPS受信部6から入力した位置検出信号に基づいて、自車両C1の位置を示す絶対座標を算出する。さらに、制御部3は、制御装置2の車両側I/F部7を介して、自車両C1に設けられたイグニッションモジュール30から、イグニッションモジュール30のオン信号及びオフ信号を入力する。オン信号を入力した場合には、運転支援システム1を起動し、オフ信号を入力した場合には運転支援システム1をシャットダウンする。
【0014】
また、制御部3は、車速センサ31及びジャイロセンサ32から、車速パルス及び方位検出信号を入力して、自律航法により基準位置からの相対位置を算出する。そして、GPS受信部6に基づく絶対座標と合わせて、自車位置を逐次特定する。
【0015】
さらに、制御部3は、車両側I/F部7を介して、ステアリングセンサ33、ポテンショメータ34、加速度センサ35、ライト制御部36から各種信号を入力する。ステアリングセンサ33は、各時点の舵角を出力する。ポテンショメータ34は、ブレーキの踏込角度を検出し、検出角度を車両側I/F部7を介して制御部3に出力する。加速度センサ35は、自車両C1の進行方向(自車両C1の長さ方向)の加速度を検出する。ライト制御部36は、自車両C1のボディに取り付けられたウィンカー、フロントライト等の点滅又は点灯を制御し、ドライバーの操作によりウィンカーが点滅すると、点滅しているウィンカーの方向を示すウィンカー検出信号を制御部3に出力する。
【0016】
また、制御部3は、自車位置及び方向と、各種センサから入力したデータ等に基づき、図2(a)に示すナビ側データ8と、図2(b)に示す走行状況データ9とをRAM4に記憶する。ナビ側データ8は、制御部3が演算した自車両C1の位置等を示すデータであって、自車位置8a、方向8b、日時8c、場所8d等を有している。場所8dは、自車両C1が走行している(又は停車している)場所を示し、道路や施設等の名称又は種別が格納される。走行状況データ9は、各時点の自車両C1の走行状態を示し、速度9a、舵角9b、ウィンカー点灯方向9c等を有している。速度9a及び舵角9bは、車速センサ31及びステアリングセンサ33からそれぞれ入力した車速パルス及びステアリング検出信号に基づいている。ウィンカー点灯方向9cは、ライト制御部36から入力したウィンカー検出信号に基づいたデータであって、左方向又は右方向等、ウィンカーの点灯方向を示すデータが格納されている。
【0017】
制御部3は、これらのナビ側データ8及び走行状況データ9を所定のサンプリング間隔毎に取得し、RAM4に記憶する。これにより、運転支援システム1が起動している間、複数のナビ側データ8及び走行状況データ9がRAM4にそれぞれ蓄積される。尚、蓄積したナビ側データ8及び走行状況データ9は、その蓄積データ数が所定数を超えた際に、最も旧いナビ側データ8及び走行状況データ9が一つずつ削除するようにしてもよい。或いは、各ナビ側データ8及び走行状況データ9が記憶された各時点からの経過時間が、所定時間を過ぎた際に、所定時間を過ぎたデータから削除するようにしてもよい。
【0018】
また、制御装置2は、地理データ記憶部10、画像プロセッサ11及びVRAM12を備えている。地理データ記憶部10は、内蔵されたハードディスク、又は光ディスク等の外部記憶媒体である。この地理データ記憶部10には、目的地までの経路を探索するための各経路データ10aと、ディスプレイ20に地図画面20aを出力するための地図描画データ10bとが格納されている。経路データ10aは、全国を各区域に区画したリージョン毎のデータであって、道路の端点や交差点を示すノードと、各ノード間を接続するリンクとの番号と、ノードやリンクの座標データを有している。
【0019】
地図描画データ10bは、全国の地図を分割したメッシュ毎に格納され、メッシュID、背景データ、道路データ等を有している。背景データは、メッシュ内の道路や施設等を示すデータである。道路データは、地図上に表示される、形状補間データ、道路幅等、道路の形状を示すデータである。制御部3は、この道路データと、制御部3が算出した自車位置と、自車両C1の走行軌跡とを照合して、自車位置を適切な道路上に位置決めするマップマッチングを行う。道路上に位置決めした場合、制御部3は、ナビ側データ8の場所8dに、位置決めした道路の名称又は種別(一般道路、高速道路等)を格納する。自車位置が店舗等の施設の敷地内等にある場合、制御部3は、マップマッチングにより車道上に位置付けられないと判断し、背景データ等を用いて、自車位置が含まれる場所の特定を行う。自車両C1が施設内にあると判断した場合、制御部3は、ナビ側データ8の場所8dに、その施設の名称又は種別(コンビニエンスストア、駐車場等)を格納する。
【0020】
画像プロセッサ11は、各地図描画データ10bのうち、自車位置周辺の地図描画デー
タ10bを地理データ記憶部10から読み出す。また、自車位置を示す指標20b(図1参照)等を地図描画データ10bに重畳して、出力用データをVRAM12に記憶する。そして、一時記憶した出力用データを所定のタイミングでディスプレイ20に出力して地図画面20aを表示する。
【0021】
また、制御装置2は、外部入力I/F部16を備えている。外部入力I/F部16は、運転支援システム1のディスプレイ20に隣設された操作スイッチ21等が操作されたとき、その入力操作に応じた電気信号を制御部3に出力する。また、ディスプレイ20は、タッチパネルであって、タッチパネルが入力操作されると、外部入力I/F部16は、入力操作に応じた電気信号を制御部3に出力する。
【0022】
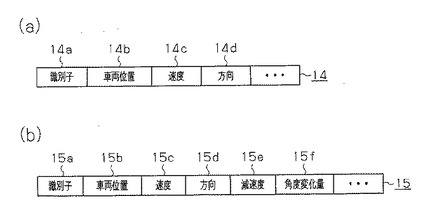
さらに、制御装置2は、取得手段としての通信部13を備えている。通信部13は、DSRC等(狭域無線通信方式)を用いて、自車両C1の周辺にある他車両C2(図7参照)と車車間通信を行う。尚、本実施形態では、自車両C1と車車間通信を行う他車両C2は、車車間通信用の通信装置、現在位置を検出する自車位置演算部、車速、方向、加速度、ブレーキ踏込角度変化量等を取得する車両情報取得部を少なくとも備えているものとする。自車両C1の通信部13は、自車両C1の位置等を車車間通信によって他車両C2に送信するとともに、他車両C2から送信された図3(a)に示す車車間通信データ14及び図3(b)に示す他車両情報としての急減速報知データ15を受信する。
【0023】
車車間通信データ14は、自車両C1を中心とした所定距離範囲(例えば100〜数百m)内にある各他車両C2からそれぞれ受信する。図3(a)に示すように、車車間通信データ14は、他車両C2の識別子14a、車両位置14b、速度14c、方向14d等を有する。識別子14aは、他車両C2が車車間通信を行う際に用いる固有のデータであって、その車車間通信データ14や、車車間通信データ14を送信した他車両C2を識別可能なデータである。車両位置14b、速度14c及び方向14dは、他車両C2の各時点での位置、速度及び方向を示す。自車両C1の通信部13は、この車車間通信データ14を受信すると、RAM4に一時記憶する。そして、受信した時点からの経過時間が所定時間を超えると、その車車間通信データ14を消去する。その結果、RAM4には、自車両C1周辺にある各他車両C2の各車車間通信データ14がそれぞれ複数記憶される。
【0024】
急減速報知データ15は、車車間通信用の通信装置を搭載した他車両C2が急減速した際に他車両C2から送信される。具体的には、他車両C2のブレーキ踏込角度の時間当たりの変化量が所定量以上になった場合、或いは減速度の絶対値が所定値以上になった場合等に、その他車両C2から送信される。図3(b)に示すように、急減速報知データ15は、他車両C2の識別子15a、車両位置15b、速度15c、方向15d、減速度15e、角度変化量15f等を有している。本実施形態では、車車間通信データ14のデータ構造に、減速度15e、角度変化量15fを付与したデータ構造になっている。減速度15eは急減速したときの減速度の絶対値を示す。角度変化量15fは、急ブレーキをかけたときのブレーキ角度の単位時間当たりの変化量を示す。減速度15e及び角度変化量15fは、必ずしも両方格納されている必要はなく、どちらか一方を有していればよい。尚、自車両C1の通信部13もまた、自車両C1が急減速した場合に、上記した急減速報知データ15を自車両C1周辺の他車両C2に対して送信する。
【0025】
このような急減速報知データ15を受信した状況として、自車両C1が、自車両C1に接近する他車両C2の前に急に進入した場合等、自車両C1のドライバーが不適切な運転を行った可能性がある。このため、自車両C1の制御部3は、急減速報知データ15を受信する前、即ち他車両C2が急減速する前のドライバーが注意すべき状況を示すデータベースを生成する。詳述すると、自車両C1の通信部13が急減速報知データ15を他車両C2から受信すると、制御部3は、自車両C1の状況を示すデータとして、受信した時点
から所定時間(例えば10秒)遡った時点のナビ側データ8及び走行状況データ9を自車両C1のRAM4から取得する。また、自車両C1の制御部3は、急減速した他車両C2の状況を示すデータとして、自車両C1のRAM4に記憶された各車車間通信データ14のうち、急減速報知データ15内の識別子15aと同じ(又は対応する)識別子14aを有する車車間通信データ14を検索する。該当する車車間通信データ14が検索されると、その車車間通信データ14を読み出す。
【0026】
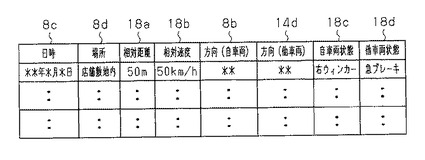
そして、制御部3は、取得したナビ側データ8及び走行状況データ9及び車車間通信データ14に基づき、図4に示す走行履歴情報としての履歴データ18を生成する。この履歴データ18は、日時8c、場所8d、相対距離18a、相対速度18b、方向(自車両)8b、方向(他車両)14d、自車両状態18c、他車両状態18dを有する。日時8c及び場所8d及び方向8b(自車両)はナビ側データ8に基づく。方向14d(他車両)は、車車間通信データ14に基づく。
【0027】
相対距離18aは、ナビ側データ8の自車位置8a及び車車間通信データ14の車両位置14bに基づき、制御部3が算出したデータであって、他車両C2が急減速した時点より所定時間遡った時点の自車両C1及び他車両C2の相対距離である。相対速度18bは、自車両C1の走行状況データ9の速度9aと、車車間通信データ14の速度14cに基づき、制御部3が算出したデータであって、他車両C2が急減速した時点より所定時間遡った時点の自車両C1及び他車両C2の相対速度を示す。
【0028】
また、自車両状態18cは、その他の自車両C1の状態を示すデータが格納され、ウィンカー点灯方向9c等が格納されている。この自車両状態18cには、その時点の自車両C1に関するデータが記憶され、天候状態や、自車両C1に複数のドライバーが乗る場合には、ドライバーの名前等を記憶するようにしても良い。他車両状態18dは、減速度15e又は角度変化量15f等が記憶される。また、他車両状態18dには、車種等、車車間通信データ14に含まれるその他のデータを格納するようにしてもよい。このような履歴データ18により、自車両C1の制御部3は、他車両C2が急減速する直前の自車両C1の注意すべき状況を判断することができる。
【0029】
履歴データ18を生成すると、制御部3は、この履歴データ18を不揮発性メモリからなる履歴記憶手段としての履歴記憶部17(図1参照)に蓄積する。このため、自車両C1周辺を走行する他車両C2が急減速することによって、急減速報知データ15を送信すると、その度に、自車両C1の履歴データ18が履歴記憶部17に蓄積される。
【0030】
また、制御装置2は、図1に示すように報知手段を構成する音声プロセッサ19を備えている。音声プロセッサ19は、制御部3の制御に従って、図示しない音声ファイルデータベースから音声ファイルを読出し、音声を合成して音声信号を出力手段としてのスピーカ22に出力する。これにより、運転支援のための案内音声、警告音が出力される。
【0031】
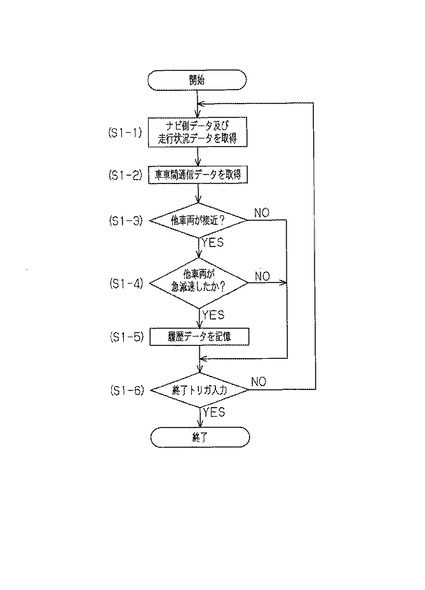
次に、本実施形態の処理手順について、図5及び図6に従って説明する。上記したように、制御部3は、イグニッションモジュール30からオン信号を入力すると、運転支援システム1を起動する。そして、GPS受信部6及び車速センサ31及びジャイロセンサ32に基づき自車位置を算出し、RAM4又は図示しないメモリに記憶する。図5に示す、履歴データ18の蓄積処理では、制御部3は、RAM4又は図示しないメモリに記憶されたナビ側データ8及び走行状況データ9を取得する(ステップS1−1)。また、通信部13が受信しRAM4に記憶された車車間通信データ14を取得する(ステップS1−2)。
【0032】
車車間通信データ14を取得すると、制御部3は、他車両C2が自車両C1に接近して
いるか否かを判断する(ステップS1−3)。このとき、制御部3は、取得した車車間通信データ14に基づき、自車位置から所定距離範囲(例えば、100mの範囲)内に他車両C2があるか否かを判断する。所定距離範囲内に他車両C2がある場合には、車車間通信データ14に含まれる方向14dに基づき、その他車両C2が、自車両C1に接近する方向に走行しているか、離間する方向に走行しているかを判断する。
【0033】
自車両C1に接近している他車両C2がないと判断した場合には(ステップS1−3においてNO)、ステップS1−6に進み、終了トリガの入力の有無を判断する。本実施形態では、終了トリガは、イグニッションモジュール30のオフ信号、ドライバー等の入力操作による停止命令である。終了トリガの入力がないと判断すると(ステップS1−3においてNO)、ステップS1−1に戻る。
【0034】
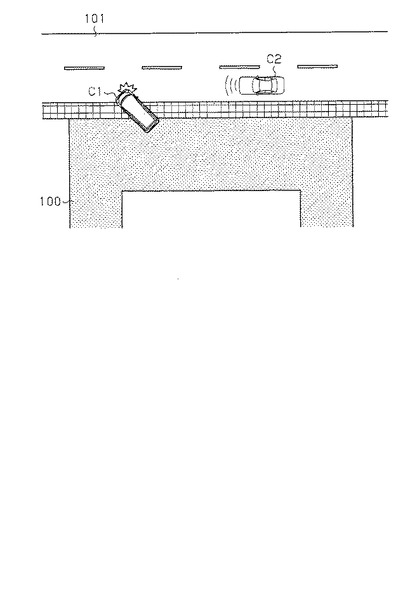
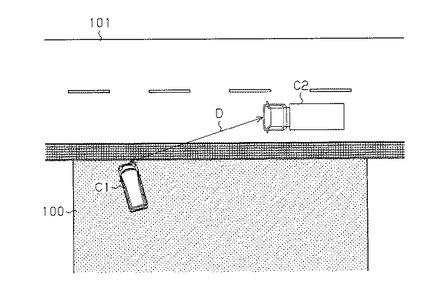
一方、自車両C1に接近している他車両C2があると判断した場合には(ステップS1−3においてYES)、制御部3は、その他車両C2の識別子14aをRAM4等に一時記憶しておく。そして、その識別子14aに対応する他車両C2が急減速したか否かを判断する(ステップS1−4)。具体的には、通信部13が、急減速報知データ15を受信したか否かを判断する。例えば、図7に示すように、他車両C2が自車両C1に接近しているにも関わらず、自車両C1が車道101の脇の敷地100から車道101に進入し、自車両C1と他車両C2との相対距離が短くなった場合、他車両C2はやむを得ず急減速する。このとき、上記したように、車車間通信の通信装置を搭載した他車両C2において、ブレーキの踏込角度の変化量が所定量以上になった場合、又は減速度の絶対値が所定値以上となった場合、他車両C2は急減速報知データ15を周囲に向けて送信する。
【0035】
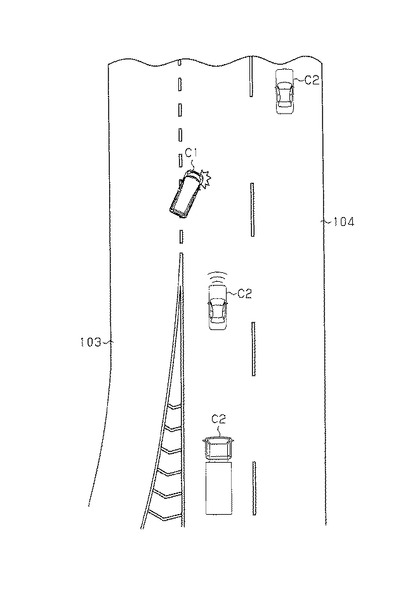
また、図8に示すように、合流車道103を走行する自車両C1の後方に、本線車道104を走行する他車両C2が接近しているにも関わらず、自車両C1が合流車道103から本線車道104に合流した場合、他車両C2との相対距離が短くなるため、他車両C2は急減速する。このときも、他車両C2のブレーキ角度の変化量が所定量以上になった場合、又は減速度の絶対値が所定値以上になった場合、他車両C2は急減速報知データ15を周囲に向けて送信する。
【0036】
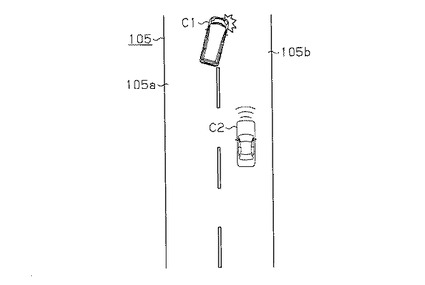
さらに、図9に示すように、2車線以上の車道105を自車両C1が走行し、自車両C1後方に他車両C2が接近している際に、自車両C1が一方の車線105aから、他方の車線105bに移動すると、他車両C2が急減速して、急減速報知データ15を送信する。
【0037】
運転支援システム1の制御部3は、通信部13が急減速報知データ15を受信すると、急減速報知データ15に含まれる減速度15e又は角度変化量15fが、所定値以上であるか否かを判断し、他車両C2が急減速したか否かを判断する。また、制御部3は、急減速報知データ15に含まれる、他車両C2の識別子15aを読み出す。そして、RAM4等に一時記憶された接近車両(他車両C2)の識別子14aと、急減速報知データ15の識別子15aとを比較し、急減速した他車両C2が、接近している他車両C2と同じ車両であるか否かを判断する。同じ車両であると判断した場合には、自車両C1に接近している他車両C2が急減速したと判断する(ステップS1−4においてYES)。同一車両でない場合には、自車両C1から離間する他車両C2が他の何らかの原因により急減速したと判断して、ステップS1−6に進む。
【0038】
一方、ステップS1−4で、自車両C1に接近している他車両C2が急減速したと判断すると(ステップS1−4においてYES)、その他車両C2及び自車両C1に対する履歴データ18を記憶する(ステップS1−5)。このとき、制御部3は、急減速報知データ15を受信した時点から所定時間遡った時点のナビ側データ8、走行状況データ9、車
車間通信データ14を取得する。そして、上記したように、ナビ側データ8、走行状況データ9、車車間通信データ14、及び急減速報知データ15に基づき、上記した履歴データ18を生成し、履歴記憶部17に記憶する。
【0039】
履歴データ18を記憶すると、制御部3は、終了トリガを入力したか否かを判断する(ステップS1−6)。終了トリガを入力していないと判断すると、ステップS1−1に戻り、ナビ側データ8及び走行状況データ9を取得し、履歴データ18の蓄積処理を繰り返す。そして、自車両C1に接近する他車両C2が急減速した場合には、履歴記憶部17に履歴データ18が追加される。
【0040】
そして、自車両C1が駐車されたり、ドライバーが運転支援モードを停止する入力操作を行うと、ステップS1−6において、制御部3が終了トリガを入力したと判断し(ステップS1−6においてYES)、処理を終了する。イグニッションモジュールがオフされても、履歴データ18は消去されないので、次に自車両C1が走行を開始した際に、履歴データ18の蓄積が再開される。このようにして、自車両C1の履歴記憶部17に履歴データ18が蓄積されていく。
【0041】
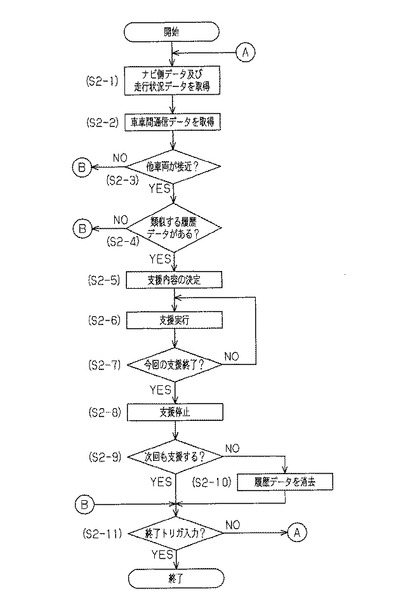
次に、履歴データ18を利用した運転支援の処理について、図6に従って説明する。この処理は、図5に示す履歴データ18の蓄積処理と並行して行われる。制御装置2の制御部3は、運転支援システム1が起動すると、ナビ側データ8及び走行状況データ9を取得する(ステップS2−1)。また、制御部3は、通信部13を介して車車間通信データ14を取得する(ステップS2−2)。そして、ステップS1−3と同様の手順で、他車両C2が自車両C1に接近しているか否かを判断する(ステップS2−3)。
【0042】
他車両C2が自車両C1に接近していると判断すると(ステップS2−3においてYES)、制御部3は、ナビ側データ8、走行状況データ9及び車車間通信データ14に基づき、履歴記憶部17に記憶された履歴データ18を参照して、現在状況と類似する履歴データ18があるか否かを判断する(ステップS2−4)。詳述すると、図10に示すように、制御部3は、ナビ側データ8の自車位置8aと、車車間通信データ14の他車両C2の車両位置14bとに基づき、自車両C1と他車両C2との相対距離Dを算出する。また、走行状況データ9の自車両C1の速度9aと、車車間通信データ14の他車両C2の速度14cに基づき相対速度ΔVを算出する。そして、蓄積された履歴データ18の中に、算出した相対距離D及び相対速度ΔVと類似する相対距離18a及び相対速度18bを持つ履歴データ18があるか否かを判断する。具体的には、算出した相対距離D及び相対速度ΔVとの差が所定値以下(例えば±10%以下)である相対距離18a及び相対速度18bがあるか否かを判断する。そして、相対距離D及び相対速度ΔVとの差が所定値以下である相対距離18a及び相対速度18bがあった場合には、現在状況と類似する履歴データ18があると判断する。また、このとき、相対距離D及び相対速度ΔVの類似度が比較的小さくても、他のデータとの類似度が大きい場合には、現在状況と類似していると判断する。例えば、履歴データ18の場所8dと、現在の場所(ナビ側データ8の場所8d)とが同一又はその種別(店舗等)が類似している場合、或いは履歴データ18の自車両状態18cに含まれるウィンカー点灯方向9cと、現在、ウィンカーが点灯している方向とが同じ場合には、履歴データ18が現在状況と類似していると判断する。また、例えば、履歴データ18の日時8cが示す時間帯が、現在状況(ナビ側データ8の日時8c)と同じ時間帯であったり、履歴データ18の方向(自車両)8b及び方向(他車両)14dが、現在の方向(ナビ側データ8の方向8b、車車間通信データ14の方向14d)と類似している場合には、履歴データ18が現在状況と類似していると判断する。
【0043】
一方、現在状況と類似しないと判断すると(ステップS2−4においてNO)、ステップS2−11に進み、終了トリガの入力の有無を判断する。終了トリガの入力がない場合
にはステップS2−1に戻る。
【0044】
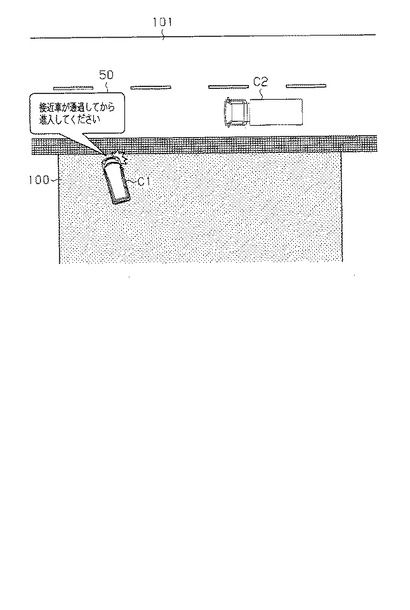
ステップS2−4において、現在状況と類似する履歴データ18があると判断すると(ステップS2−4においてYES)、制御部3は、履歴データ18に基づいて、自車両C1のドライバーへの支援内容を決定し(ステップS2−5)、決定した支援を実行する(ステップS2−6)。例えば、図11に示すように、自車位置が車道101外や、施設の敷地100内にあって、右側のウィンカーが点灯(点滅)している際に、制御部3が、現在の状況と類似した履歴データ18があると判断すると、制御部3は、ROM5等に記憶された運転支援プログラム等に基づき、接近している他車両C2の通過を待機させるための支援内容を決定する。例えば支援内容が、音声案内である場合には、制御部3は、図11に示すように、「接近車が通過してから進入してください」等の音声50を合成してスピーカ22から出力する。このとき、音声でなくても警告音でもよい。このとき、音声50を出力した後、所定の距離範囲内に接近する他車両C2がなくなると、「合流可能です」等の音声を出力しても良い。
【0045】
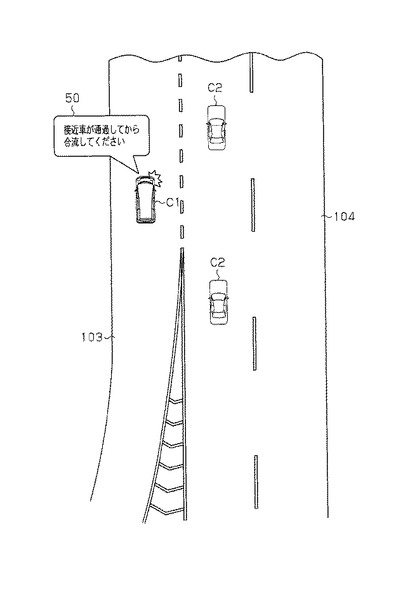
また、図12に示すように、自車両C1が合流車道103を走行し、右側のウィンカーが点灯している際に、制御部3が、そのときの状況と類似した履歴データ18があると判断すると、「接近車が通過してから合流してください」等の音声50を合成し、スピーカ22から出力する。
【0046】
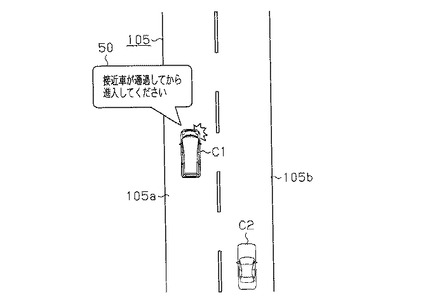
さらに、図13に示すように、自車両C1が、2車線以上ある車道105を自車両C1が走行し、車線変更のために右側のウィンカーが点灯している際に、制御部3が、そのときの状況と類似した履歴データ18があると判断すると、「接近車が通過してから進入してください」等の音声50を合成し、スピーカ22から出力する。
【0047】
さらに、制御部3は、現在実行中の支援を終了するか否かを判断する(ステップS2−7)。具体的には、自車両C1とその他車両C2とが接近している状況が継続している間は支援を終了しないと判断し(ステップS2−7においてNO)、支援を実行する(ステップS2−6)。支援を終了すると判断すると(ステップS2−7においてYES)、今回の支援を停止し(ステップS2−8)、次回も同じような状況が発生した際に、支援を行うか否かを判断する(ステップS2−9)。具体的には、今回の支援の結果、自車両C1のドライバーが、接近する他車両C2が通過するまで待機したか、後続する他車両C2が急減速しなかったか等に基づいて判断する。或いは、同じような状況下で、音声50に従い、適切な運転を行った回数をカウンタで計数し、そのカウンタ値が所定値以上になった場合に、その状況下での支援を行わないようにしてもよい。例えば、車道101外の敷地100から車道101に合流する際に、接近する他車両C2が急減速しなかった回数をカウントし、その回数が所定回数(例えば3回)になった場合に、ステップS2−9において次回の支援を行わないように判断するようにしてもよい。
【0048】
ステップS2−9において、次回の支援を行わないと判断すると(ステップS2−9においてNO)、その状況に対応する履歴データ18を消去する(ステップS2−10)。例えば、自車両C1が車道101外の敷地100から車道101への合流する場合であって、他車両C2との相対距離18aが50〜100mの範囲である状況で、次回からの支援を行わないと判断した場合、場所8dに「店舗敷地」が格納され、相対距離18aに50m〜100mの範囲の距離等が格納された履歴データ18を消去する。また、ステップS2−9において、次回も支援を行うと判断すると(ステップS2−9においてYES)、ステップS2−11に進み、終了トリガを入力したか否かを判断する。終了トリガを入力したと判断すると(ステップS2−11においてYES)、運転支援の処理を終了する。
【0049】
上記実施形態によれば、以下のような効果を得ることができる。
(1)上記実施形態では、運転支援システム1の制御部3は、自車両C1に接近した他車両C2が急減速した際に、自車両C1及び他車両C2に関する情報である履歴データ18を履歴記憶部17に記憶するようにした。従って、そのドライバーが行いがちな不適切な運転に関するデータを蓄積することができる。また、自車両C1が走行している間、各時点の自車両C1の現在状況と履歴データ18とを比較し、現在状況と類似している履歴データ18があるか否かを判断するようにした。類似している履歴データ18があると判断した場合には、音声プロセッサ19より音声を出力して、自車両C1のドライバーの注意を促すようにした。従って、車道外からの車道への進入、本線車道への合流、車線変更等の際に、無理な運転が繰り返されることを未然に防ぐことができる。また、ドライバーの運転傾向に応じた履歴データ18が生成されるので、各ドライバーに対して的確なタイミングで警告を行うことができる。
【0050】
(2)上記実施形態では、運転支援システム1の通信部13は、車両位置14b、速度14c等を含む車車間通信データ14を他車両C2から取得するようにした。そして、他車両C2から急減速報知データ15を受信した際に、RAM4に一時記憶した車車間通信データ14を用いて履歴データ18を生成するようにした。即ち、車車間通信データ14は、他車両C2に設けられた各種センサのみが検出できるデータからなるため、精度の高い履歴データ18を蓄積することができる。
【0051】
(3)上記実施形態では、音声50等による警告を行った後、次回も引き続いて支援を続行するか否かを判断するようにした。このため、そのドライバーが無理な運転をしなくなった場合には、次回から音声50等の出力を停止するので、ドライバーに煩わしさを感じさせないようにすることができる。
【0052】
(4)上記実施形態では、現在状況と類似している履歴データ18がある場合に、音声プロセッサ19により、進入や合流を待機させる音声50を出力するようにした。このため、進入先等を見ているドライバーに対し、その注意を喚起しやすい案内を行うことができる。
【0053】
尚、上記実施形態は以下のように変更してもよい。
・上記実施形態では、急減速報知データ15は、識別子15a、車両位置15b、速度15c、方向15d等を有するようにしたが、少なくとも識別子15aを有していればよい。この場合でも、他車両C2が急減速した際に、他車両C2は識別子15aを自車両C1に送信することにより、自車両C1の制御部3は他車両C2が急減速したと判断することができる。
【0054】
・上記実施形態では、車車間通信データ14及び急減速報知データ15を異なるデータ構造としたが、車車間通信データ14を急減速報知データ15のデータ構造と同じにしてもよい。この場合、他車両C2は、定期的に車車間通信データ14を送信するとともに、急減速した際に車車間通信データ14を送信する。自車両C1の制御部3は、車車間通信データ14を受信すると、受信した車車間通信データ14に含まれる減速度又は角度変化量が所定値以上であるか否かを判断し、所定値以上であると判断した場合には、他車両C2が急減速したと判断する。
【0055】
・上記実施形態では、自車両C1の制御部3は、他車両C2の車車間通信データ14を定期的に取得するようにしたが、急減速報知データ15を受信した際に、他車両C2に対し、急減速の直前のナビ側データ及び走行状況データを要求するようにしてもよい。そして、急減速の直前のナビ側データ及び走行状況データを受信し、それらを履歴データ18として記憶するようにしてもよい。
【0056】
・自車両C1の運転支援システム1の制御部3は、急減速報知データ15以外のデータに基づき、他車両C2の急減速を判断しても良い。例えば、自車両C1に設けられたレーダによって自車両C1及び他車両C2の相対距離を算出し、他車両C2との位置変化に基づいて、減速度を演算するようにしてもよい。或いは、自車両C1の側部又は後端に設けられたカメラから画像データを取得し、この画像データを画像処理して他車両C2を認識するようにしてもよい。そして、各画像データを画像処理することにより、他車両C2の速度や減速度を演算するようにしてもよい。この場合、他車両C2から急減速報知データ15を受信しなくても、自車両C1が自ら他車両C2の急減速を判断することができる。
【0057】
・ナビ側データ8、走行状況データ9は一つのデータにしてもよい。また、ナビ側データ8、走行状況データ9、履歴データ18は上記したデータ構成以外の構成でもよい。
・上記実施形態では、制御部3は、自車両C1の位置と他車両C2の位置とに基づいて相対距離18aを判断するようにしたが、自車両C1に設けられたレーダによって測定するようにしてもよい。また、レーダにより測定した相対距離の変化によって、相対速度を演算するようにしてもよい。
【0058】
・ステップS2−4において、現在状況が履歴データ18と類似しているか否かを判断する際に、履歴データ18の各項目と現在状況との類似度を重み付けして、その類似度を判断するようにしてもよい。例えば、ある履歴データ18について、現在状況と履歴データ18の日時8cとが類似している場合には、重み付けされた「1」の値を類似度に加算する。現在の場所8d及びウィンカー点灯方向9cが履歴データ18の場所8d及び自車両状態18cと同一又は類似している場合には、重み付けされた「3」の値を類似度に加算する。そして、履歴データ18の各項目について類似しているか否か判断し、重み付けされた値を総和した類似度が、所定値以上になると、その履歴データ18は現在状況と類似していると判断するようにしてもよい。
【0059】
・ステップS2−5において、支援内容は、上記した音声案内だけでなく、車道への進入又は合流を一時的に回避するために、自動的にブレーキをかける等、自車両C1の運転制御を行ってもよい。
【0060】
・上記実施形態では音声50により、ドライバーの注意を喚起したが、単なる警告音でもよい。又は、画像プロセッサ11により、ドライバーの注意を喚起する画像をディスプレイ20に表示するようにしてもよい。又は、履歴データ18に基づき、注意が必要な地点を、地図画面20a上にマークで表示するようにしてもよい。又は、ドライバーの注意を喚起するために、インストルメントパネルに設けられたランプを点灯又は点滅させるようにしてもよい。
【図面の簡単な説明】
【0061】
【図1】本実施形態の運転支援システムのブロック図。
【図2】(a)はナビ側データ、(b)は走行状況データの説明図。
【図3】(a)は車車間通信データ、(b)は急減速報知データの説明図。
【図4】履歴データの説明図。
【図5】本実施形態の処理手順の説明図。
【図6】本実施形態の処理手順の説明図。
【図7】自車両が車道に進入する状況の説明図。
【図8】自車両が本線車道に合流する状況の説明図。
【図9】自車両が車線変更する状況の説明図。
【図10】自車両と他車両との相対距離を算出する工程の説明図。
【図11】自車両が車道に進入する状況での支援の説明図。
【図12】自車両が本線車道に合流する状況での支援の説明図。
【図13】自車両が車線変更する状況での支援の説明図。
【図14】従来における不適切な運転が行われた状況の説明図。
【符号の説明】
【0062】
1…運転支援システム、2…運転支援装置としての制御装置、3…判断手段、比較手段、報知手段及び結果判断手段としての制御部、13…取得手段、通信手段としての通信部、14…他車両情報としての車車間通信データ、15…他車両情報としての急減速報知データ、17…履歴記憶手段としての履歴記憶部、18…走行履歴情報としての履歴データ、19…報知手段を構成する音声プロセッサ、22…出力手段としてのスピーカ、50…音声、C1…自車両、C2…他車両。
【技術分野】
【0001】
本発明は、運転支援方法及び運転支援装置に関する。
【背景技術】
【0002】
近年、自動車の円滑な走行を図るために、高度道路交通システムの開発が進められている。このシステムの一環として、車両周辺状況に応じて警告を行うシステムが提案されている。例えば、特許文献1には、車車間通信及び車両検出センサによって、自車両周辺を走行する他車両の走行状態を受信及び検出するシステムが記載されている。このシステムは、他車両が急ブレーキ又は車線変更等、自車両の走行に影響を与える走行を行った際に、自車両のドライバーに対して警告表示をディスプレイに表示して、注意を喚起したり、自車両を自動制御する。
【特許文献1】特開2005−50187号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記したシステムでは、他車両に対する注意を喚起できるものの、不適切な運転を行ったドライバーに対して警告を与えることはできない。例えば、図14に示すように、他車両C2が自車両C1に接近しているにも関わらず、自車両C1が道路脇の敷地100から車道101内に矢印方向に沿って進入した場合、車間距離が短くなり、他車両C2はやむを得ず急ブレーキをかける。このように、他車両C2が急ブレーキをかけた原因が自車両C1にあるとしても、上記したシステムでは、自車両C1のドライバーの注意を喚起することはできない。実際には、不適切な運転を行うドライバーは、その運転操作が適切でないことを認識しないか、判らないことが多く、同じような状況において不適切な運転を繰り返す可能性が高い。
【0004】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、適切でない運転操作の繰り返しを防ぐ運転支援方法及び運転支援装置を提供することにある。
【課題を解決するための手段】
【0005】
上記問題点を解決するために、請求項1に記載の発明は、自車両の運転者の運転を支援する運転支援方法において、前記自車両に接近した他車両に関する他車両情報を取得し、前記他車両情報に基づき、前記他車両が急減速したと判断した際に、前記自車両及び前記他車両に関する走行履歴情報を履歴記憶手段に記憶するとともに、前記自車両及び前記他車両の現在状況と前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を促すことを要旨とする。
【0006】
請求項2に記載の発明は、自車両に搭載される運転支援装置において、前記自車両に接近した他車両に関する他車両情報を取得する取得手段と、前記他車両情報に基づき、前記他車両が急減速したか否かを判断する判断手段と、前記他車両が急減速したと判断した際に、そのときの前記自車両及び前記他車両に関する走行履歴情報を記憶する履歴記憶手段と、前記自車両及び前記他車両の現在状況と、前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、類似性を判断する比較手段と、前記比較手段が、蓄積された前記各走行履歴情報のうち、前記自車両及び前記他車両の現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を喚起する報知手段とを備えることを要旨とする。
【0007】
請求項3に記載の発明は、請求項2に記載の運転支援装置において、前記取得手段は、前記他車両情報を車車間通信により取得する通信手段をさらに備えたことを要旨とする。
請求項4に記載の発明は、請求項2又は3に記載の運転支援装置において、前記報知手段による報知が実行された後の前記運転者の運転操作が適切であるか否かを判断し、次回から同じ状況下での報知を続行するか否かを決定する結果判断手段をさらに備えたことを要旨とする。
【発明の効果】
【0008】
請求項1に記載の発明によれば、自車両に接近した他車両が急減速した際に、自車両及び他車両に関する走行履歴情報を記憶する。また、自車両が走行している間、各時点の自車両の現在状況と走行履歴情報とを比較し、類似している走行履歴情報がある場合には、運転者の注意を促す。従って、接近する他車両が急減速するような、不適切な運転を再び行うことを未然に防ぐことができる。
【0009】
請求項2に記載の発明によれば、自車両に接近した他車両が急減速した際に、自車両及び他車両に関する走行履歴情報を記憶する。また、自車両が走行している間、各時点の自車両の現在状況と走行履歴情報とを比較し、類似している走行履歴情報がある場合には、運転者の注意を促す。従って、接近する他車両が急減速するような、不適切な運転を再び行うことを未然に防ぐことができる。
【0010】
請求項3に記載の発明によれば、取得手段は、他車両情報を車車間通信により取得する。このため、他車両によって検出された正確なデータを用いることができるため、精度の高い走行履歴情報を蓄積することができる。
【0011】
請求項4に記載の発明によれば、報知を行った後の運転操作が適切であるか否かが判断される。このため、例えば、運転操作が適切である場合に、次回からの報知を実行せず、運転者に煩わしさを感じさせないようにすることができる。また、適切でない場合には、繰り返し報知を行うことによって、適切な運転を支援することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の運転支援装置を具体化した実施形態を図1〜図13に従って説明する。図1は、自動車(車両)に搭載された運転支援システム1の構成を説明するブロック図である。
【0013】
図1に示すように、自車両C1(図7参照)に搭載された運転支援システム1は、運転支援装置としての制御装置2と、各種画面を表示するディスプレイ20及び出力手段としてのスピーカ22を備えている。制御装置2は、主制御を行い、CPU等からなる、判断手段、比較手段、報知手段及び結果判断手段としての制御部3と、制御部3の演算結果を一時記憶するRAM4と、運転支援プログラム等、各種プログラムを記憶するROM5と、GPS受信部6とを備えている。制御部3は、GPS受信部6から入力した位置検出信号に基づいて、自車両C1の位置を示す絶対座標を算出する。さらに、制御部3は、制御装置2の車両側I/F部7を介して、自車両C1に設けられたイグニッションモジュール30から、イグニッションモジュール30のオン信号及びオフ信号を入力する。オン信号を入力した場合には、運転支援システム1を起動し、オフ信号を入力した場合には運転支援システム1をシャットダウンする。
【0014】
また、制御部3は、車速センサ31及びジャイロセンサ32から、車速パルス及び方位検出信号を入力して、自律航法により基準位置からの相対位置を算出する。そして、GPS受信部6に基づく絶対座標と合わせて、自車位置を逐次特定する。
【0015】
さらに、制御部3は、車両側I/F部7を介して、ステアリングセンサ33、ポテンショメータ34、加速度センサ35、ライト制御部36から各種信号を入力する。ステアリングセンサ33は、各時点の舵角を出力する。ポテンショメータ34は、ブレーキの踏込角度を検出し、検出角度を車両側I/F部7を介して制御部3に出力する。加速度センサ35は、自車両C1の進行方向(自車両C1の長さ方向)の加速度を検出する。ライト制御部36は、自車両C1のボディに取り付けられたウィンカー、フロントライト等の点滅又は点灯を制御し、ドライバーの操作によりウィンカーが点滅すると、点滅しているウィンカーの方向を示すウィンカー検出信号を制御部3に出力する。
【0016】
また、制御部3は、自車位置及び方向と、各種センサから入力したデータ等に基づき、図2(a)に示すナビ側データ8と、図2(b)に示す走行状況データ9とをRAM4に記憶する。ナビ側データ8は、制御部3が演算した自車両C1の位置等を示すデータであって、自車位置8a、方向8b、日時8c、場所8d等を有している。場所8dは、自車両C1が走行している(又は停車している)場所を示し、道路や施設等の名称又は種別が格納される。走行状況データ9は、各時点の自車両C1の走行状態を示し、速度9a、舵角9b、ウィンカー点灯方向9c等を有している。速度9a及び舵角9bは、車速センサ31及びステアリングセンサ33からそれぞれ入力した車速パルス及びステアリング検出信号に基づいている。ウィンカー点灯方向9cは、ライト制御部36から入力したウィンカー検出信号に基づいたデータであって、左方向又は右方向等、ウィンカーの点灯方向を示すデータが格納されている。
【0017】
制御部3は、これらのナビ側データ8及び走行状況データ9を所定のサンプリング間隔毎に取得し、RAM4に記憶する。これにより、運転支援システム1が起動している間、複数のナビ側データ8及び走行状況データ9がRAM4にそれぞれ蓄積される。尚、蓄積したナビ側データ8及び走行状況データ9は、その蓄積データ数が所定数を超えた際に、最も旧いナビ側データ8及び走行状況データ9が一つずつ削除するようにしてもよい。或いは、各ナビ側データ8及び走行状況データ9が記憶された各時点からの経過時間が、所定時間を過ぎた際に、所定時間を過ぎたデータから削除するようにしてもよい。
【0018】
また、制御装置2は、地理データ記憶部10、画像プロセッサ11及びVRAM12を備えている。地理データ記憶部10は、内蔵されたハードディスク、又は光ディスク等の外部記憶媒体である。この地理データ記憶部10には、目的地までの経路を探索するための各経路データ10aと、ディスプレイ20に地図画面20aを出力するための地図描画データ10bとが格納されている。経路データ10aは、全国を各区域に区画したリージョン毎のデータであって、道路の端点や交差点を示すノードと、各ノード間を接続するリンクとの番号と、ノードやリンクの座標データを有している。
【0019】
地図描画データ10bは、全国の地図を分割したメッシュ毎に格納され、メッシュID、背景データ、道路データ等を有している。背景データは、メッシュ内の道路や施設等を示すデータである。道路データは、地図上に表示される、形状補間データ、道路幅等、道路の形状を示すデータである。制御部3は、この道路データと、制御部3が算出した自車位置と、自車両C1の走行軌跡とを照合して、自車位置を適切な道路上に位置決めするマップマッチングを行う。道路上に位置決めした場合、制御部3は、ナビ側データ8の場所8dに、位置決めした道路の名称又は種別(一般道路、高速道路等)を格納する。自車位置が店舗等の施設の敷地内等にある場合、制御部3は、マップマッチングにより車道上に位置付けられないと判断し、背景データ等を用いて、自車位置が含まれる場所の特定を行う。自車両C1が施設内にあると判断した場合、制御部3は、ナビ側データ8の場所8dに、その施設の名称又は種別(コンビニエンスストア、駐車場等)を格納する。
【0020】
画像プロセッサ11は、各地図描画データ10bのうち、自車位置周辺の地図描画デー
タ10bを地理データ記憶部10から読み出す。また、自車位置を示す指標20b(図1参照)等を地図描画データ10bに重畳して、出力用データをVRAM12に記憶する。そして、一時記憶した出力用データを所定のタイミングでディスプレイ20に出力して地図画面20aを表示する。
【0021】
また、制御装置2は、外部入力I/F部16を備えている。外部入力I/F部16は、運転支援システム1のディスプレイ20に隣設された操作スイッチ21等が操作されたとき、その入力操作に応じた電気信号を制御部3に出力する。また、ディスプレイ20は、タッチパネルであって、タッチパネルが入力操作されると、外部入力I/F部16は、入力操作に応じた電気信号を制御部3に出力する。
【0022】
さらに、制御装置2は、取得手段としての通信部13を備えている。通信部13は、DSRC等(狭域無線通信方式)を用いて、自車両C1の周辺にある他車両C2(図7参照)と車車間通信を行う。尚、本実施形態では、自車両C1と車車間通信を行う他車両C2は、車車間通信用の通信装置、現在位置を検出する自車位置演算部、車速、方向、加速度、ブレーキ踏込角度変化量等を取得する車両情報取得部を少なくとも備えているものとする。自車両C1の通信部13は、自車両C1の位置等を車車間通信によって他車両C2に送信するとともに、他車両C2から送信された図3(a)に示す車車間通信データ14及び図3(b)に示す他車両情報としての急減速報知データ15を受信する。
【0023】
車車間通信データ14は、自車両C1を中心とした所定距離範囲(例えば100〜数百m)内にある各他車両C2からそれぞれ受信する。図3(a)に示すように、車車間通信データ14は、他車両C2の識別子14a、車両位置14b、速度14c、方向14d等を有する。識別子14aは、他車両C2が車車間通信を行う際に用いる固有のデータであって、その車車間通信データ14や、車車間通信データ14を送信した他車両C2を識別可能なデータである。車両位置14b、速度14c及び方向14dは、他車両C2の各時点での位置、速度及び方向を示す。自車両C1の通信部13は、この車車間通信データ14を受信すると、RAM4に一時記憶する。そして、受信した時点からの経過時間が所定時間を超えると、その車車間通信データ14を消去する。その結果、RAM4には、自車両C1周辺にある各他車両C2の各車車間通信データ14がそれぞれ複数記憶される。
【0024】
急減速報知データ15は、車車間通信用の通信装置を搭載した他車両C2が急減速した際に他車両C2から送信される。具体的には、他車両C2のブレーキ踏込角度の時間当たりの変化量が所定量以上になった場合、或いは減速度の絶対値が所定値以上になった場合等に、その他車両C2から送信される。図3(b)に示すように、急減速報知データ15は、他車両C2の識別子15a、車両位置15b、速度15c、方向15d、減速度15e、角度変化量15f等を有している。本実施形態では、車車間通信データ14のデータ構造に、減速度15e、角度変化量15fを付与したデータ構造になっている。減速度15eは急減速したときの減速度の絶対値を示す。角度変化量15fは、急ブレーキをかけたときのブレーキ角度の単位時間当たりの変化量を示す。減速度15e及び角度変化量15fは、必ずしも両方格納されている必要はなく、どちらか一方を有していればよい。尚、自車両C1の通信部13もまた、自車両C1が急減速した場合に、上記した急減速報知データ15を自車両C1周辺の他車両C2に対して送信する。
【0025】
このような急減速報知データ15を受信した状況として、自車両C1が、自車両C1に接近する他車両C2の前に急に進入した場合等、自車両C1のドライバーが不適切な運転を行った可能性がある。このため、自車両C1の制御部3は、急減速報知データ15を受信する前、即ち他車両C2が急減速する前のドライバーが注意すべき状況を示すデータベースを生成する。詳述すると、自車両C1の通信部13が急減速報知データ15を他車両C2から受信すると、制御部3は、自車両C1の状況を示すデータとして、受信した時点
から所定時間(例えば10秒)遡った時点のナビ側データ8及び走行状況データ9を自車両C1のRAM4から取得する。また、自車両C1の制御部3は、急減速した他車両C2の状況を示すデータとして、自車両C1のRAM4に記憶された各車車間通信データ14のうち、急減速報知データ15内の識別子15aと同じ(又は対応する)識別子14aを有する車車間通信データ14を検索する。該当する車車間通信データ14が検索されると、その車車間通信データ14を読み出す。
【0026】
そして、制御部3は、取得したナビ側データ8及び走行状況データ9及び車車間通信データ14に基づき、図4に示す走行履歴情報としての履歴データ18を生成する。この履歴データ18は、日時8c、場所8d、相対距離18a、相対速度18b、方向(自車両)8b、方向(他車両)14d、自車両状態18c、他車両状態18dを有する。日時8c及び場所8d及び方向8b(自車両)はナビ側データ8に基づく。方向14d(他車両)は、車車間通信データ14に基づく。
【0027】
相対距離18aは、ナビ側データ8の自車位置8a及び車車間通信データ14の車両位置14bに基づき、制御部3が算出したデータであって、他車両C2が急減速した時点より所定時間遡った時点の自車両C1及び他車両C2の相対距離である。相対速度18bは、自車両C1の走行状況データ9の速度9aと、車車間通信データ14の速度14cに基づき、制御部3が算出したデータであって、他車両C2が急減速した時点より所定時間遡った時点の自車両C1及び他車両C2の相対速度を示す。
【0028】
また、自車両状態18cは、その他の自車両C1の状態を示すデータが格納され、ウィンカー点灯方向9c等が格納されている。この自車両状態18cには、その時点の自車両C1に関するデータが記憶され、天候状態や、自車両C1に複数のドライバーが乗る場合には、ドライバーの名前等を記憶するようにしても良い。他車両状態18dは、減速度15e又は角度変化量15f等が記憶される。また、他車両状態18dには、車種等、車車間通信データ14に含まれるその他のデータを格納するようにしてもよい。このような履歴データ18により、自車両C1の制御部3は、他車両C2が急減速する直前の自車両C1の注意すべき状況を判断することができる。
【0029】
履歴データ18を生成すると、制御部3は、この履歴データ18を不揮発性メモリからなる履歴記憶手段としての履歴記憶部17(図1参照)に蓄積する。このため、自車両C1周辺を走行する他車両C2が急減速することによって、急減速報知データ15を送信すると、その度に、自車両C1の履歴データ18が履歴記憶部17に蓄積される。
【0030】
また、制御装置2は、図1に示すように報知手段を構成する音声プロセッサ19を備えている。音声プロセッサ19は、制御部3の制御に従って、図示しない音声ファイルデータベースから音声ファイルを読出し、音声を合成して音声信号を出力手段としてのスピーカ22に出力する。これにより、運転支援のための案内音声、警告音が出力される。
【0031】
次に、本実施形態の処理手順について、図5及び図6に従って説明する。上記したように、制御部3は、イグニッションモジュール30からオン信号を入力すると、運転支援システム1を起動する。そして、GPS受信部6及び車速センサ31及びジャイロセンサ32に基づき自車位置を算出し、RAM4又は図示しないメモリに記憶する。図5に示す、履歴データ18の蓄積処理では、制御部3は、RAM4又は図示しないメモリに記憶されたナビ側データ8及び走行状況データ9を取得する(ステップS1−1)。また、通信部13が受信しRAM4に記憶された車車間通信データ14を取得する(ステップS1−2)。
【0032】
車車間通信データ14を取得すると、制御部3は、他車両C2が自車両C1に接近して
いるか否かを判断する(ステップS1−3)。このとき、制御部3は、取得した車車間通信データ14に基づき、自車位置から所定距離範囲(例えば、100mの範囲)内に他車両C2があるか否かを判断する。所定距離範囲内に他車両C2がある場合には、車車間通信データ14に含まれる方向14dに基づき、その他車両C2が、自車両C1に接近する方向に走行しているか、離間する方向に走行しているかを判断する。
【0033】
自車両C1に接近している他車両C2がないと判断した場合には(ステップS1−3においてNO)、ステップS1−6に進み、終了トリガの入力の有無を判断する。本実施形態では、終了トリガは、イグニッションモジュール30のオフ信号、ドライバー等の入力操作による停止命令である。終了トリガの入力がないと判断すると(ステップS1−3においてNO)、ステップS1−1に戻る。
【0034】
一方、自車両C1に接近している他車両C2があると判断した場合には(ステップS1−3においてYES)、制御部3は、その他車両C2の識別子14aをRAM4等に一時記憶しておく。そして、その識別子14aに対応する他車両C2が急減速したか否かを判断する(ステップS1−4)。具体的には、通信部13が、急減速報知データ15を受信したか否かを判断する。例えば、図7に示すように、他車両C2が自車両C1に接近しているにも関わらず、自車両C1が車道101の脇の敷地100から車道101に進入し、自車両C1と他車両C2との相対距離が短くなった場合、他車両C2はやむを得ず急減速する。このとき、上記したように、車車間通信の通信装置を搭載した他車両C2において、ブレーキの踏込角度の変化量が所定量以上になった場合、又は減速度の絶対値が所定値以上となった場合、他車両C2は急減速報知データ15を周囲に向けて送信する。
【0035】
また、図8に示すように、合流車道103を走行する自車両C1の後方に、本線車道104を走行する他車両C2が接近しているにも関わらず、自車両C1が合流車道103から本線車道104に合流した場合、他車両C2との相対距離が短くなるため、他車両C2は急減速する。このときも、他車両C2のブレーキ角度の変化量が所定量以上になった場合、又は減速度の絶対値が所定値以上になった場合、他車両C2は急減速報知データ15を周囲に向けて送信する。
【0036】
さらに、図9に示すように、2車線以上の車道105を自車両C1が走行し、自車両C1後方に他車両C2が接近している際に、自車両C1が一方の車線105aから、他方の車線105bに移動すると、他車両C2が急減速して、急減速報知データ15を送信する。
【0037】
運転支援システム1の制御部3は、通信部13が急減速報知データ15を受信すると、急減速報知データ15に含まれる減速度15e又は角度変化量15fが、所定値以上であるか否かを判断し、他車両C2が急減速したか否かを判断する。また、制御部3は、急減速報知データ15に含まれる、他車両C2の識別子15aを読み出す。そして、RAM4等に一時記憶された接近車両(他車両C2)の識別子14aと、急減速報知データ15の識別子15aとを比較し、急減速した他車両C2が、接近している他車両C2と同じ車両であるか否かを判断する。同じ車両であると判断した場合には、自車両C1に接近している他車両C2が急減速したと判断する(ステップS1−4においてYES)。同一車両でない場合には、自車両C1から離間する他車両C2が他の何らかの原因により急減速したと判断して、ステップS1−6に進む。
【0038】
一方、ステップS1−4で、自車両C1に接近している他車両C2が急減速したと判断すると(ステップS1−4においてYES)、その他車両C2及び自車両C1に対する履歴データ18を記憶する(ステップS1−5)。このとき、制御部3は、急減速報知データ15を受信した時点から所定時間遡った時点のナビ側データ8、走行状況データ9、車
車間通信データ14を取得する。そして、上記したように、ナビ側データ8、走行状況データ9、車車間通信データ14、及び急減速報知データ15に基づき、上記した履歴データ18を生成し、履歴記憶部17に記憶する。
【0039】
履歴データ18を記憶すると、制御部3は、終了トリガを入力したか否かを判断する(ステップS1−6)。終了トリガを入力していないと判断すると、ステップS1−1に戻り、ナビ側データ8及び走行状況データ9を取得し、履歴データ18の蓄積処理を繰り返す。そして、自車両C1に接近する他車両C2が急減速した場合には、履歴記憶部17に履歴データ18が追加される。
【0040】
そして、自車両C1が駐車されたり、ドライバーが運転支援モードを停止する入力操作を行うと、ステップS1−6において、制御部3が終了トリガを入力したと判断し(ステップS1−6においてYES)、処理を終了する。イグニッションモジュールがオフされても、履歴データ18は消去されないので、次に自車両C1が走行を開始した際に、履歴データ18の蓄積が再開される。このようにして、自車両C1の履歴記憶部17に履歴データ18が蓄積されていく。
【0041】
次に、履歴データ18を利用した運転支援の処理について、図6に従って説明する。この処理は、図5に示す履歴データ18の蓄積処理と並行して行われる。制御装置2の制御部3は、運転支援システム1が起動すると、ナビ側データ8及び走行状況データ9を取得する(ステップS2−1)。また、制御部3は、通信部13を介して車車間通信データ14を取得する(ステップS2−2)。そして、ステップS1−3と同様の手順で、他車両C2が自車両C1に接近しているか否かを判断する(ステップS2−3)。
【0042】
他車両C2が自車両C1に接近していると判断すると(ステップS2−3においてYES)、制御部3は、ナビ側データ8、走行状況データ9及び車車間通信データ14に基づき、履歴記憶部17に記憶された履歴データ18を参照して、現在状況と類似する履歴データ18があるか否かを判断する(ステップS2−4)。詳述すると、図10に示すように、制御部3は、ナビ側データ8の自車位置8aと、車車間通信データ14の他車両C2の車両位置14bとに基づき、自車両C1と他車両C2との相対距離Dを算出する。また、走行状況データ9の自車両C1の速度9aと、車車間通信データ14の他車両C2の速度14cに基づき相対速度ΔVを算出する。そして、蓄積された履歴データ18の中に、算出した相対距離D及び相対速度ΔVと類似する相対距離18a及び相対速度18bを持つ履歴データ18があるか否かを判断する。具体的には、算出した相対距離D及び相対速度ΔVとの差が所定値以下(例えば±10%以下)である相対距離18a及び相対速度18bがあるか否かを判断する。そして、相対距離D及び相対速度ΔVとの差が所定値以下である相対距離18a及び相対速度18bがあった場合には、現在状況と類似する履歴データ18があると判断する。また、このとき、相対距離D及び相対速度ΔVの類似度が比較的小さくても、他のデータとの類似度が大きい場合には、現在状況と類似していると判断する。例えば、履歴データ18の場所8dと、現在の場所(ナビ側データ8の場所8d)とが同一又はその種別(店舗等)が類似している場合、或いは履歴データ18の自車両状態18cに含まれるウィンカー点灯方向9cと、現在、ウィンカーが点灯している方向とが同じ場合には、履歴データ18が現在状況と類似していると判断する。また、例えば、履歴データ18の日時8cが示す時間帯が、現在状況(ナビ側データ8の日時8c)と同じ時間帯であったり、履歴データ18の方向(自車両)8b及び方向(他車両)14dが、現在の方向(ナビ側データ8の方向8b、車車間通信データ14の方向14d)と類似している場合には、履歴データ18が現在状況と類似していると判断する。
【0043】
一方、現在状況と類似しないと判断すると(ステップS2−4においてNO)、ステップS2−11に進み、終了トリガの入力の有無を判断する。終了トリガの入力がない場合
にはステップS2−1に戻る。
【0044】
ステップS2−4において、現在状況と類似する履歴データ18があると判断すると(ステップS2−4においてYES)、制御部3は、履歴データ18に基づいて、自車両C1のドライバーへの支援内容を決定し(ステップS2−5)、決定した支援を実行する(ステップS2−6)。例えば、図11に示すように、自車位置が車道101外や、施設の敷地100内にあって、右側のウィンカーが点灯(点滅)している際に、制御部3が、現在の状況と類似した履歴データ18があると判断すると、制御部3は、ROM5等に記憶された運転支援プログラム等に基づき、接近している他車両C2の通過を待機させるための支援内容を決定する。例えば支援内容が、音声案内である場合には、制御部3は、図11に示すように、「接近車が通過してから進入してください」等の音声50を合成してスピーカ22から出力する。このとき、音声でなくても警告音でもよい。このとき、音声50を出力した後、所定の距離範囲内に接近する他車両C2がなくなると、「合流可能です」等の音声を出力しても良い。
【0045】
また、図12に示すように、自車両C1が合流車道103を走行し、右側のウィンカーが点灯している際に、制御部3が、そのときの状況と類似した履歴データ18があると判断すると、「接近車が通過してから合流してください」等の音声50を合成し、スピーカ22から出力する。
【0046】
さらに、図13に示すように、自車両C1が、2車線以上ある車道105を自車両C1が走行し、車線変更のために右側のウィンカーが点灯している際に、制御部3が、そのときの状況と類似した履歴データ18があると判断すると、「接近車が通過してから進入してください」等の音声50を合成し、スピーカ22から出力する。
【0047】
さらに、制御部3は、現在実行中の支援を終了するか否かを判断する(ステップS2−7)。具体的には、自車両C1とその他車両C2とが接近している状況が継続している間は支援を終了しないと判断し(ステップS2−7においてNO)、支援を実行する(ステップS2−6)。支援を終了すると判断すると(ステップS2−7においてYES)、今回の支援を停止し(ステップS2−8)、次回も同じような状況が発生した際に、支援を行うか否かを判断する(ステップS2−9)。具体的には、今回の支援の結果、自車両C1のドライバーが、接近する他車両C2が通過するまで待機したか、後続する他車両C2が急減速しなかったか等に基づいて判断する。或いは、同じような状況下で、音声50に従い、適切な運転を行った回数をカウンタで計数し、そのカウンタ値が所定値以上になった場合に、その状況下での支援を行わないようにしてもよい。例えば、車道101外の敷地100から車道101に合流する際に、接近する他車両C2が急減速しなかった回数をカウントし、その回数が所定回数(例えば3回)になった場合に、ステップS2−9において次回の支援を行わないように判断するようにしてもよい。
【0048】
ステップS2−9において、次回の支援を行わないと判断すると(ステップS2−9においてNO)、その状況に対応する履歴データ18を消去する(ステップS2−10)。例えば、自車両C1が車道101外の敷地100から車道101への合流する場合であって、他車両C2との相対距離18aが50〜100mの範囲である状況で、次回からの支援を行わないと判断した場合、場所8dに「店舗敷地」が格納され、相対距離18aに50m〜100mの範囲の距離等が格納された履歴データ18を消去する。また、ステップS2−9において、次回も支援を行うと判断すると(ステップS2−9においてYES)、ステップS2−11に進み、終了トリガを入力したか否かを判断する。終了トリガを入力したと判断すると(ステップS2−11においてYES)、運転支援の処理を終了する。
【0049】
上記実施形態によれば、以下のような効果を得ることができる。
(1)上記実施形態では、運転支援システム1の制御部3は、自車両C1に接近した他車両C2が急減速した際に、自車両C1及び他車両C2に関する情報である履歴データ18を履歴記憶部17に記憶するようにした。従って、そのドライバーが行いがちな不適切な運転に関するデータを蓄積することができる。また、自車両C1が走行している間、各時点の自車両C1の現在状況と履歴データ18とを比較し、現在状況と類似している履歴データ18があるか否かを判断するようにした。類似している履歴データ18があると判断した場合には、音声プロセッサ19より音声を出力して、自車両C1のドライバーの注意を促すようにした。従って、車道外からの車道への進入、本線車道への合流、車線変更等の際に、無理な運転が繰り返されることを未然に防ぐことができる。また、ドライバーの運転傾向に応じた履歴データ18が生成されるので、各ドライバーに対して的確なタイミングで警告を行うことができる。
【0050】
(2)上記実施形態では、運転支援システム1の通信部13は、車両位置14b、速度14c等を含む車車間通信データ14を他車両C2から取得するようにした。そして、他車両C2から急減速報知データ15を受信した際に、RAM4に一時記憶した車車間通信データ14を用いて履歴データ18を生成するようにした。即ち、車車間通信データ14は、他車両C2に設けられた各種センサのみが検出できるデータからなるため、精度の高い履歴データ18を蓄積することができる。
【0051】
(3)上記実施形態では、音声50等による警告を行った後、次回も引き続いて支援を続行するか否かを判断するようにした。このため、そのドライバーが無理な運転をしなくなった場合には、次回から音声50等の出力を停止するので、ドライバーに煩わしさを感じさせないようにすることができる。
【0052】
(4)上記実施形態では、現在状況と類似している履歴データ18がある場合に、音声プロセッサ19により、進入や合流を待機させる音声50を出力するようにした。このため、進入先等を見ているドライバーに対し、その注意を喚起しやすい案内を行うことができる。
【0053】
尚、上記実施形態は以下のように変更してもよい。
・上記実施形態では、急減速報知データ15は、識別子15a、車両位置15b、速度15c、方向15d等を有するようにしたが、少なくとも識別子15aを有していればよい。この場合でも、他車両C2が急減速した際に、他車両C2は識別子15aを自車両C1に送信することにより、自車両C1の制御部3は他車両C2が急減速したと判断することができる。
【0054】
・上記実施形態では、車車間通信データ14及び急減速報知データ15を異なるデータ構造としたが、車車間通信データ14を急減速報知データ15のデータ構造と同じにしてもよい。この場合、他車両C2は、定期的に車車間通信データ14を送信するとともに、急減速した際に車車間通信データ14を送信する。自車両C1の制御部3は、車車間通信データ14を受信すると、受信した車車間通信データ14に含まれる減速度又は角度変化量が所定値以上であるか否かを判断し、所定値以上であると判断した場合には、他車両C2が急減速したと判断する。
【0055】
・上記実施形態では、自車両C1の制御部3は、他車両C2の車車間通信データ14を定期的に取得するようにしたが、急減速報知データ15を受信した際に、他車両C2に対し、急減速の直前のナビ側データ及び走行状況データを要求するようにしてもよい。そして、急減速の直前のナビ側データ及び走行状況データを受信し、それらを履歴データ18として記憶するようにしてもよい。
【0056】
・自車両C1の運転支援システム1の制御部3は、急減速報知データ15以外のデータに基づき、他車両C2の急減速を判断しても良い。例えば、自車両C1に設けられたレーダによって自車両C1及び他車両C2の相対距離を算出し、他車両C2との位置変化に基づいて、減速度を演算するようにしてもよい。或いは、自車両C1の側部又は後端に設けられたカメラから画像データを取得し、この画像データを画像処理して他車両C2を認識するようにしてもよい。そして、各画像データを画像処理することにより、他車両C2の速度や減速度を演算するようにしてもよい。この場合、他車両C2から急減速報知データ15を受信しなくても、自車両C1が自ら他車両C2の急減速を判断することができる。
【0057】
・ナビ側データ8、走行状況データ9は一つのデータにしてもよい。また、ナビ側データ8、走行状況データ9、履歴データ18は上記したデータ構成以外の構成でもよい。
・上記実施形態では、制御部3は、自車両C1の位置と他車両C2の位置とに基づいて相対距離18aを判断するようにしたが、自車両C1に設けられたレーダによって測定するようにしてもよい。また、レーダにより測定した相対距離の変化によって、相対速度を演算するようにしてもよい。
【0058】
・ステップS2−4において、現在状況が履歴データ18と類似しているか否かを判断する際に、履歴データ18の各項目と現在状況との類似度を重み付けして、その類似度を判断するようにしてもよい。例えば、ある履歴データ18について、現在状況と履歴データ18の日時8cとが類似している場合には、重み付けされた「1」の値を類似度に加算する。現在の場所8d及びウィンカー点灯方向9cが履歴データ18の場所8d及び自車両状態18cと同一又は類似している場合には、重み付けされた「3」の値を類似度に加算する。そして、履歴データ18の各項目について類似しているか否か判断し、重み付けされた値を総和した類似度が、所定値以上になると、その履歴データ18は現在状況と類似していると判断するようにしてもよい。
【0059】
・ステップS2−5において、支援内容は、上記した音声案内だけでなく、車道への進入又は合流を一時的に回避するために、自動的にブレーキをかける等、自車両C1の運転制御を行ってもよい。
【0060】
・上記実施形態では音声50により、ドライバーの注意を喚起したが、単なる警告音でもよい。又は、画像プロセッサ11により、ドライバーの注意を喚起する画像をディスプレイ20に表示するようにしてもよい。又は、履歴データ18に基づき、注意が必要な地点を、地図画面20a上にマークで表示するようにしてもよい。又は、ドライバーの注意を喚起するために、インストルメントパネルに設けられたランプを点灯又は点滅させるようにしてもよい。
【図面の簡単な説明】
【0061】
【図1】本実施形態の運転支援システムのブロック図。
【図2】(a)はナビ側データ、(b)は走行状況データの説明図。
【図3】(a)は車車間通信データ、(b)は急減速報知データの説明図。
【図4】履歴データの説明図。
【図5】本実施形態の処理手順の説明図。
【図6】本実施形態の処理手順の説明図。
【図7】自車両が車道に進入する状況の説明図。
【図8】自車両が本線車道に合流する状況の説明図。
【図9】自車両が車線変更する状況の説明図。
【図10】自車両と他車両との相対距離を算出する工程の説明図。
【図11】自車両が車道に進入する状況での支援の説明図。
【図12】自車両が本線車道に合流する状況での支援の説明図。
【図13】自車両が車線変更する状況での支援の説明図。
【図14】従来における不適切な運転が行われた状況の説明図。
【符号の説明】
【0062】
1…運転支援システム、2…運転支援装置としての制御装置、3…判断手段、比較手段、報知手段及び結果判断手段としての制御部、13…取得手段、通信手段としての通信部、14…他車両情報としての車車間通信データ、15…他車両情報としての急減速報知データ、17…履歴記憶手段としての履歴記憶部、18…走行履歴情報としての履歴データ、19…報知手段を構成する音声プロセッサ、22…出力手段としてのスピーカ、50…音声、C1…自車両、C2…他車両。
【特許請求の範囲】
【請求項1】
自車両の運転者の運転を支援する運転支援方法において、
前記自車両に接近した他車両に関する他車両情報を取得し、前記他車両情報に基づき、前記他車両が急減速したと判断した際に、前記自車両及び前記他車両に関する走行履歴情報を履歴記憶手段に記憶するとともに、
前記自車両及び前記他車両の現在状況と前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を喚起することを特徴とする運転支援方法。
【請求項2】
自車両に搭載される運転支援装置において、
前記自車両に接近した他車両に関する他車両情報を取得する取得手段と、
前記他車両情報に基づき、前記他車両が急減速したか否かを判断する判断手段と、
前記他車両が急減速したと判断した際に、そのときの前記自車両及び前記他車両に関する走行履歴情報を記憶する履歴記憶手段と、
前記自車両及び前記他車両の現在状況と、前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、類似性を判断する比較手段と、
前記比較手段が、蓄積された前記各走行履歴情報のうち、前記自車両及び前記他車両の現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を喚起する報知手段と
を備えることを特徴とする運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
前記取得手段は、前記他車両情報を車車間通信により取得する通信手段をさらに備えたことを特徴とする運転支援装置。
【請求項4】
請求項2又は3に記載の運転支援装置において、
前記報知手段による報知が実行された後の前記運転者の運転操作が適切であるか否かを判断し、次回から同じ状況下での報知を続行するか否かを決定する結果判断手段をさらに備えたことを特徴とする運転支援装置。
【請求項1】
自車両の運転者の運転を支援する運転支援方法において、
前記自車両に接近した他車両に関する他車両情報を取得し、前記他車両情報に基づき、前記他車両が急減速したと判断した際に、前記自車両及び前記他車両に関する走行履歴情報を履歴記憶手段に記憶するとともに、
前記自車両及び前記他車両の現在状況と前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を喚起することを特徴とする運転支援方法。
【請求項2】
自車両に搭載される運転支援装置において、
前記自車両に接近した他車両に関する他車両情報を取得する取得手段と、
前記他車両情報に基づき、前記他車両が急減速したか否かを判断する判断手段と、
前記他車両が急減速したと判断した際に、そのときの前記自車両及び前記他車両に関する走行履歴情報を記憶する履歴記憶手段と、
前記自車両及び前記他車両の現在状況と、前記履歴記憶手段に蓄積された前記各走行履歴情報とを比較し、類似性を判断する比較手段と、
前記比較手段が、蓄積された前記各走行履歴情報のうち、前記自車両及び前記他車両の現在状況と類似する前記走行履歴情報があると判断した際に、前記自車両の運転者の注意を喚起する報知手段と
を備えることを特徴とする運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
前記取得手段は、前記他車両情報を車車間通信により取得する通信手段をさらに備えたことを特徴とする運転支援装置。
【請求項4】
請求項2又は3に記載の運転支援装置において、
前記報知手段による報知が実行された後の前記運転者の運転操作が適切であるか否かを判断し、次回から同じ状況下での報知を続行するか否かを決定する結果判断手段をさらに備えたことを特徴とする運転支援装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2008−59074(P2008−59074A)
【公開日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願番号】特願2006−232489(P2006−232489)
【出願日】平成18年8月29日(2006.8.29)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願日】平成18年8月29日(2006.8.29)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]