
運転支援方法及び運転支援装置
【課題】運転支援方法及び運転支援装置において、適切な衝突予想時間を算出してサービス提供の遅れを軽減することにある。
【解決手段】自車両(1a)の位置(Pa)と他車両(1b)の位置(Pb)との間の直線距離(L)と、自車両(1a)の位置(Pa)と他車両(1b)の位置(Pb)とを結ぶ直線(S)と他車両(1b)の位置(Pb)から他車両(1b)の進行方位(Db)へ伸ばした直線(S2)とがなす角度(γ)とを用いて、他車両(1b)の位置(Pb)から他車両(1b)の進行方位(Db)へ伸ばした直線(S2)上に位置し且つ自車両(1a)の位置(Pa)と最短となる点(C)を求め、この点(C)から他車両(1b)の位置(Pb)までの距離(L3)と他車両(1b)の速度(Vb)とを用いて他車両(1b)と自車両(1a)とが衝突するまでの衝突予想時間(TTC)を算出している。
【解決手段】自車両(1a)の位置(Pa)と他車両(1b)の位置(Pb)との間の直線距離(L)と、自車両(1a)の位置(Pa)と他車両(1b)の位置(Pb)とを結ぶ直線(S)と他車両(1b)の位置(Pb)から他車両(1b)の進行方位(Db)へ伸ばした直線(S2)とがなす角度(γ)とを用いて、他車両(1b)の位置(Pb)から他車両(1b)の進行方位(Db)へ伸ばした直線(S2)上に位置し且つ自車両(1a)の位置(Pa)と最短となる点(C)を求め、この点(C)から他車両(1b)の位置(Pb)までの距離(L3)と他車両(1b)の速度(Vb)とを用いて他車両(1b)と自車両(1a)とが衝突するまでの衝突予想時間(TTC)を算出している。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、運転支援方法及び運転支援装置に係り、特に電子地図を備えていないシステムにおいてサービス提供の遅れを軽減する運転支援方法及び運転支援装置に関する。
【背景技術】
【0002】
車両には、自車両に接近して衝突しそうな他車両、歩行者等が有る場合に、衝突可能性の情報を運転者に提供することで、運転者に警告を発して注意を喚起する運転支援装置を搭載しているものがある。
この運転支援装置においては、一般に、自車両の位置、進行方位、速度の情報を検出する自車両情報取得手段としてのGPSモジュールを備え、車車間通信で他車両との間で自車両の位置、進行方位、速度の情報を交換している。また、運転支援装置には、GPSモジュールに加えて、正確な運転支援を行うために、電子地図を備えているものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−9232号公報
【特許文献2】特開2006−72617号公報
【0004】
特許文献1に係る車両の運転支援装置は、自車両の進路と交差する方向に移動する複数の対象物毎に、各対象物の走行状況の変化を推定して自車両との衝突のリスクを設定し、各対象物のリスクが高い順に上位から下位に順次付けて整列し、各対象物と自車両との衝突可能性を、順次付けられた各対象物の情報に基づいて順次判断し、衝突余裕時間(衝突予想時間)を用いて運転支援するものである。
特許文献2に係る車両用運転支援システムは、GPSモジュールで検出した自車両の位置の情報を地図内で右折する車両と直進する車両との衝突可能性を判定し、車車間通信により情報を取得して運転支援するものである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来、電子地図を備えていない運転支援装置では、右折する車両と直進する車両との衝突を未然に防止するアプリケーションソフトを実現する上で、適切なサービスの提供を行うために、対象となる他車両との衝突予想時間(TTC:Time To Collision)を、できるだけ正確に算出する必要がある。
一般に、衝突予想時間(TTC)は、
TTC(秒)=L/Vb
で算出されている。
ここで、Lは、自車両と他車両との直線距離である。Vbは、他車両の速度である。
【0006】
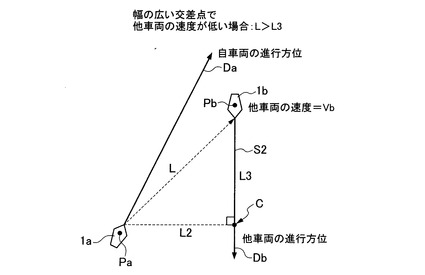
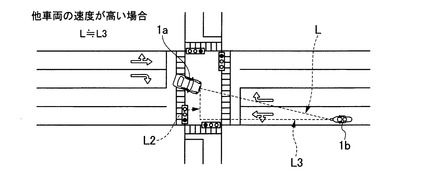
しかしながら、例えば、図4に示すように、幅の広い交差点で、他車両1bが低速で接近する場合では、衝突予想時間(TTC)が下がらなくなり、サービスの提供が、交差点の間近でなされてしまうか、若しくは、サービスが提供されなくなるおそれがあった。
ここで、図4において、
1aは、自車両である。また、Lは、自車両1aと他車両1bとの直線距離である。
Daは、自車両1aの進行方位である。
Vbは、他車両1bの速度である。
Dbは、他車両1bの進行方位である。
L3は、他車両1bの位置Pbから他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cから他車両1bの位置Pbまでの距離である。
L2は、自車両1aの位置Paから他車両1bの進行方位Dbへ伸ばした直線S2上の点Cまでの最短の距離である。
つまり、幅の広い交差点で他車両1bが低速で直進して接近してきた場合に、通常の交差点の場合よりも他車両1bが交差点に接近しなければ、サービスが提供されなかった。これは、サービス提供のタイミングは、衝突予想時間(TTC(秒)=L/Vb)がしきい値mを下回り(TTC<m)、衝突予想時間(TTC)の条件が成立したときなので、他車両1bの速度Vbが低い状態若しくは交差点の幅が広い場合に、LとL3との差が大きくなり(L>L3)、衝突予想時間(TTC)の条件が成立する地点は、他車両1bが交差点の直前になってしまうからである。従って、サービスの提供が遅れる傾向にある。
【0007】
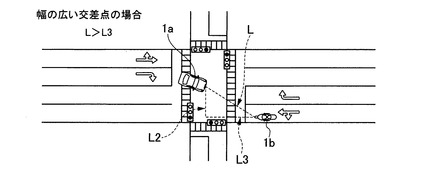
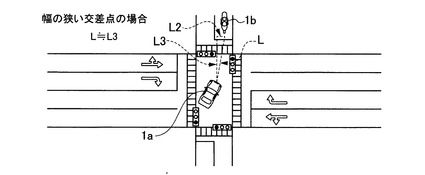
また、図5に示す幅の広い交差点の場合と図6に示す幅の狭い交差点の場合とで他車両1bの速度Vbが同等であるとすると、図5に示す幅の広い交差点の場合には、LとL3との差が大きくなり(L>L3)、このため、サービスの提供が遅れる傾向にある。
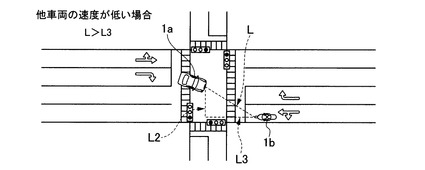
更に、図7に示す他車両1bの速度Vbが低い場合と図8に示す他車両1bの速度Vbが高い場合とでは、図8に示す他車両1bの速度Vbが高い場合に、衝突予想時間(TTC)の条件が成立するLが大きくなり、LとL3との差が小さくなるので、衝突予想時間(TTC)に大きな影響を与えないが、図7に示す他車両1bの速度Vbが低い場合には、衝突予想時間(TTC)の条件が成立するLが小さくなり、LとL3との差が大きくなる(L>L3)。このため、サービスの提供が遅れる傾向にある。
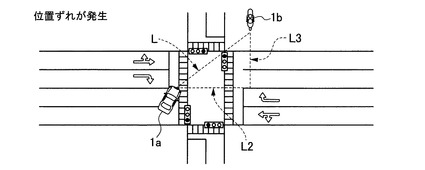
更にまた、自車両1a又は他車両1bのGPS情報の受信状態が悪い場合に、実際は、図9に示すように、他車両1bの位置Pbが道路内であるにもかかわらず、図10に示すように、自車両1aが道路内で横方向にずれたり、他車両1bの位置Pbが横方向の道路外に位置する、いわゆる位置ずれが生じ、このため、上記の図5に示す幅の広い交差点を走行している場合と同じ現象が起こり、自車両1bの位置Pb又は他車両1bの位置Pbを誤認識してしまうおそれがある。
【0008】
そこで、この発明の目的は、自車両が右折しようとしている交差点の幅が広い場合、また、自車両が右折しようとしているときに他車両が低速で接近してきた場合、更に、自車両が右折しようとしているときに自車両又は他車両のGPS情報の受信状況が悪く他車両の位置を横方向にずれた位置と誤認識した場合でも、適切な衝突予想時間を算出してサービス提供の遅れを軽減する運転支援方法及び運転支援装置を提供することにある。
【課題を解決するための手段】
【0009】
この発明は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて他車両と自車両とが衝突するまでの衝突予想時間を算出する。
【発明の効果】
【0010】
この発明の運転支援方法及び運転支援装置は、自車両が右折しようとしている交差点の幅が広い場合、また、自車両が右折しようとしているときに他車両が低速で接近してきた場合、更に、自車両が右折しようとしているときに自車両又は他車両のGPS情報の受信状況が悪く他車両の位置を横方向にずれた位置と誤認識した場合でも、適切な衝突予想時間を算出してサービス提供の遅れを軽減できる。
【図面の簡単な説明】
【0011】
【図1】図1は運転支援方法のフローチャートである。(実施例)
【図2】図2は運転支援装置のシステム構成図である。(実施例)
【図3】図3は対象車両判定の進行方位の説明図である。(実施例)
【図4】図4は幅の広い交差点で他車両が低速の場合の対象車両判定の進行方位の説明図である。(従来例)
【図5】図5は道幅が広い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図6】図6は道幅が狭い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図7】図7は他車両の速度が低い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図8】図8は他車両の速度が高い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図9】図9は実際の自車両と他車両の進行方位の説明図である。(従来例)
【図10】図10は自車両又は他車両のGPS情報の受信状態が悪い場合で自車両又は他車両に横方向の位置ずれが生じたときの説明図である。(従来例)
【発明を実施するための形態】
【0012】
この発明は、自車両が右折しようとしている交差点の幅が広い場合、また、自車両が右折しようとしているときに他車両が低速で接近してきた場合、更に、自車両が右折しようとしているときに自車両又は他車両のGPS情報の受信状況が悪く他車両の位置を横方向にずれた位置と誤認識した場合でも、適切な衝突予想時間を算出してサービスの提供の遅れを軽減する目的を、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて衝突予想時間を算出することにより実現するものである。
【実施例】
【0013】
図1〜図3は、この発明の実施例を示すものである。
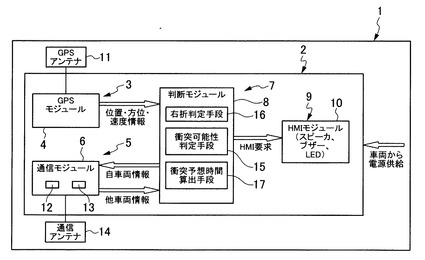
図2において、1は車両、2はこの車両1に搭載される運転支援装置である。
車両1は、図3に示すように、自車両1aと他車両1bとからなり、夫々運転支援装置2を搭載している。
運転支援装置2は、電子地図を備えていないシステムのものであり、自車両1aの位置を取得する自車両情報取得手段3としてのGPSモジュール4と、他車両1bの位置を取得する他車両情報取得手段5としての通信モジュール6と、情報判定手段7としての判断モジュール8と、運転者情報提供手段9としての情報提供モジュール10とを備え、車両1から電源を受ける。
【0014】
GPSモジュール4は、GPS衛星からGPS情報を受信するように車両1に設けられたGPSアンテナ11に接続し、GPS情報から自車両1aの現在位置を測定することによって自車両1aの位置、進行方位、速度を検出し、この検出した自車両情報を判断モジュール8に送信する。
【0015】
通信モジュール6は、受信手段12と送信手段13とを備え、他車両1bとの間で送受信するように車両1に設けられた通信アンテナ14に接続し、自車両1aと他車両1bとの間で自車両情報及び他車両情報(他車両の位置、進行方位、速度)を送受信する。よって、この通信モジュール6は、車車間通信により他車両1bの位置と進行方位と速度とを取得する他車両情報取得手段5として機能する。なお、他車両1bの位置と進行方位とを取得する手段としては、車車間通信の他に、路車間通信、カメラ画像通信、レーダ通信等を用いることができる。
【0016】
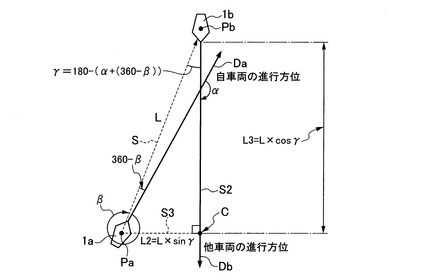
判断モジュール8は、図3に示すように、GPSモジュール4により取得した自車両1aの位置Pa、進行方位Daの自車両情報と、通信モジュール6により取得した他車両1bの位置Pb、進行方位Dbの他車両情報とに基づいて、自車両1aと他車両1bとの衝突可能性を判定する衝突可能性判定手段15と、自車両1aが右折するのか否かを判定する右折判定手段16と、他車両1bと自車両1aとが衝突するまでの衝突予想時間(TTC:Time To Collision)を算出する衝突予想時間算出手段17を備える。
衝突予想時間算出手段17は、自車両1aの位置Paと他車両1bの位置Pbとの間の直線距離Lと、自車両1aの位置Paと他車両1bの位置Pbとを結ぶ直線Sと他車両1bの位置Pbから他車両1aの進行方位Dbへ伸ばした直線S2とがなす角度γとを用いて、他車両1bの位置Pbから他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cを求め、この点Cから他車両1bの位置Pbまでの距離L3と他車両1bの速度Vbとを用いて他車両1bと自車両1aとが衝突するまでの衝突予想時間(TTC)を算出する。
【0017】
この図3において、
αは、自車両1aの進行方位Daと他車両1bの進行方位Dbがなす角度(自車両1aのGPSモジュールから得られる進行方位Da、位置Paの情報と、他車両1bのGPSモジュールから得られる進行方位Db、位置Pbの情報とにより算出された角度)である。
βは、自車両1aの進行方位Daと、自車両1aと他車両1bを結ぶ直線Sとがなす角度(自車両1aのGPSモジュールから得られる進行方位Da、位置Paの情報と、他車両1bのGPSモジュールから得られる進行方位Db、位置Pbの情報とにより算出された角度)である。
L2は、自車両1aの位置Paから他車両1bの進行方位Dbへ伸びて且つこの進行方位Dbに対して直交する直線S3上で、この進行方位Dbの直線S2の点Cまでの最短の距離であり、
L2=L*sinγ
で算出される。
自車両1aの位置Paと他車両1bの位置Pbとを結ぶ直線Sと他車両1bの位置Pbから他車両1aの進行方位Dbへ伸ばした直線S2とがなす角度γは、
γ=180−(α+(360−β))
で算出される。
点Cから他車両1bの位置Pbまでの距離L3は、他車両1bの位置から他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cから他車両1bの位置Pbまでの距離、つまり、他車両1bの位置Pbから他車両1bの進行方向ベクトルが自車両1aに最も接近する点Cまでの距離であり、
L3=L*cosγ
で算出される。
【0018】
この実施例において、衝突予想時間(TTC)は、
TTC(秒)=L3/Vb(秒)
で算出される。
そして、サービス提供のタイミングは、衝突予想時間(TTC)(秒)が規定の値としてのしきい値(m)(秒)未満のときである(TTC<m)。
なお、他車両1bの速度Vbとしては、自車両1aと他車両1bとの相対速度とすることも可能である。
【0019】
情報提供モジュール10は、判断モジュール8から入力するHMI(Human Machine Interface)要求に応じて、スピーカの音声、ブザーの警告音、LEDの点滅等により、運転者に自車両1aが他車両1bと衝突の可能性があるとの情報を提供する。
【0020】
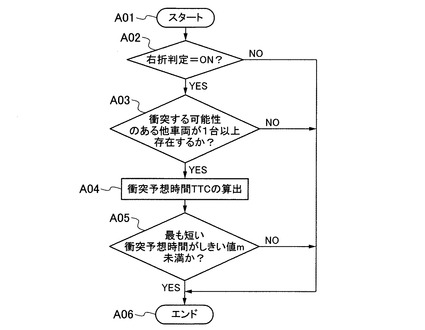
次に、この実施例に係る運転支援について、図1のフローチャートに基づいて説明する。
図1に示すように、運転支援装置2においてプログラムがスタートすると(ステップA01)、先ず、自車両1aが右折しようとしているか否かを判断する(ステップA02)。
このステップA02がYESの場合には、衝突する可能性のある他車両1bが1台以上存在するか否かを判断する(ステップA03)。これは、対象車両判定を意味する。
このステップA03がYESの場合には、衝突予想時間(TTC)を算出する(ステップA04)。
この衝突予想時間(TTC)は、
TTC(秒)=L3/Vb(秒)
で算出される。
そして、最も短い衝突予想時間(TTC)がしきい値(m)未満か否かを判断する(ステップA05)。
このステップA05がYESの場合には、プログラムをエンドとする(ステップA06)。
また、前記ステップA02がNOの場合、前記ステップA03がNOの場合、前記ステップA05がNOの場合にも、プログラムをエンドとする(ステップA06)。
【0021】
この結果、この実施例では、衝突予想時間(TTC)の算出のために、他車両1bの位置Pbから他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cから他車両1bの位置Pbまでの距離L3を用いている。
これにより、自車両1aが右折しようとしている交差点の幅が広く、他車両1bの速度が低い場合でも、適切な衝突予想時間(TTC)を算出することができる。よって、適切なタイミングで運転者への情報のサービス提供を行うことができる。
また、自車両1aが右折しようとしている時に、他車両1bが低速で接近してきても、適切な衝突予想時間を算出することができる。よって、適切なタイミングで運転者へ他車両の接近情報を提供することができる。
更に、自車両1aが右折しようとしている時に、自車両1a又は他車両1bのGPS情報の受信状況が悪く、自車両1aの位置Pa又は他車両1bの位置Pbを横方向にずれた位置と誤認識しても、衝突予想時間(TTC)を算出することができる。よって、自車両1a又は他車両1bのGPS情報の受信状況が悪く、横方向の位置ずれを起こし、幅の広い道路を走行しているのと似たような状態になったときに、サービス提供が交差点の間近でされ、若しくはサービス提供がされなくなるような状況を回避し、適切なタイミングで運転者へ他車両の接近情報のサービスを提供行うことができる。従って、サービス提供の遅れを緩和する効果が見込めるので、都市部等のGPS情報の受信状況が悪い道路においても、効果を期待できる。
また、他車両情報取得手段5としての通信モジュール6は、車車間通信により他車両1bの位置Pbと進行方位Dbと速度Vbとを取得する。これにより、正確な他車両1bの位置Pbと進行方位Dbと速度Vbとを取得することができる。
【産業上の利用可能性】
【0022】
この発明の運転支援方法及び運転支援装置は、運転者に適切なサービス提供を行うものであり、各種車両に適用できる。
【符号の説明】
【0023】
1 車両
1a 自車両
1b 他車両
2 運転支援装置
3 自車両情報取得手段
4 GPSモジュール
5 他車両情報取得手段
6 通信モジュール
7 情報判定手段
8 判断モジュール
9 運転者情報提供手段
10 情報提供モジュール
11 GPSアンテナ
12 受信手段
13 送信手段
14 通信アンテナ
15 衝突可能性判定手段
16 右折判定手段
17 衝突予想時間算出手段
【技術分野】
【0001】
この発明は、運転支援方法及び運転支援装置に係り、特に電子地図を備えていないシステムにおいてサービス提供の遅れを軽減する運転支援方法及び運転支援装置に関する。
【背景技術】
【0002】
車両には、自車両に接近して衝突しそうな他車両、歩行者等が有る場合に、衝突可能性の情報を運転者に提供することで、運転者に警告を発して注意を喚起する運転支援装置を搭載しているものがある。
この運転支援装置においては、一般に、自車両の位置、進行方位、速度の情報を検出する自車両情報取得手段としてのGPSモジュールを備え、車車間通信で他車両との間で自車両の位置、進行方位、速度の情報を交換している。また、運転支援装置には、GPSモジュールに加えて、正確な運転支援を行うために、電子地図を備えているものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−9232号公報
【特許文献2】特開2006−72617号公報
【0004】
特許文献1に係る車両の運転支援装置は、自車両の進路と交差する方向に移動する複数の対象物毎に、各対象物の走行状況の変化を推定して自車両との衝突のリスクを設定し、各対象物のリスクが高い順に上位から下位に順次付けて整列し、各対象物と自車両との衝突可能性を、順次付けられた各対象物の情報に基づいて順次判断し、衝突余裕時間(衝突予想時間)を用いて運転支援するものである。
特許文献2に係る車両用運転支援システムは、GPSモジュールで検出した自車両の位置の情報を地図内で右折する車両と直進する車両との衝突可能性を判定し、車車間通信により情報を取得して運転支援するものである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来、電子地図を備えていない運転支援装置では、右折する車両と直進する車両との衝突を未然に防止するアプリケーションソフトを実現する上で、適切なサービスの提供を行うために、対象となる他車両との衝突予想時間(TTC:Time To Collision)を、できるだけ正確に算出する必要がある。
一般に、衝突予想時間(TTC)は、
TTC(秒)=L/Vb
で算出されている。
ここで、Lは、自車両と他車両との直線距離である。Vbは、他車両の速度である。
【0006】
しかしながら、例えば、図4に示すように、幅の広い交差点で、他車両1bが低速で接近する場合では、衝突予想時間(TTC)が下がらなくなり、サービスの提供が、交差点の間近でなされてしまうか、若しくは、サービスが提供されなくなるおそれがあった。
ここで、図4において、
1aは、自車両である。また、Lは、自車両1aと他車両1bとの直線距離である。
Daは、自車両1aの進行方位である。
Vbは、他車両1bの速度である。
Dbは、他車両1bの進行方位である。
L3は、他車両1bの位置Pbから他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cから他車両1bの位置Pbまでの距離である。
L2は、自車両1aの位置Paから他車両1bの進行方位Dbへ伸ばした直線S2上の点Cまでの最短の距離である。
つまり、幅の広い交差点で他車両1bが低速で直進して接近してきた場合に、通常の交差点の場合よりも他車両1bが交差点に接近しなければ、サービスが提供されなかった。これは、サービス提供のタイミングは、衝突予想時間(TTC(秒)=L/Vb)がしきい値mを下回り(TTC<m)、衝突予想時間(TTC)の条件が成立したときなので、他車両1bの速度Vbが低い状態若しくは交差点の幅が広い場合に、LとL3との差が大きくなり(L>L3)、衝突予想時間(TTC)の条件が成立する地点は、他車両1bが交差点の直前になってしまうからである。従って、サービスの提供が遅れる傾向にある。
【0007】
また、図5に示す幅の広い交差点の場合と図6に示す幅の狭い交差点の場合とで他車両1bの速度Vbが同等であるとすると、図5に示す幅の広い交差点の場合には、LとL3との差が大きくなり(L>L3)、このため、サービスの提供が遅れる傾向にある。
更に、図7に示す他車両1bの速度Vbが低い場合と図8に示す他車両1bの速度Vbが高い場合とでは、図8に示す他車両1bの速度Vbが高い場合に、衝突予想時間(TTC)の条件が成立するLが大きくなり、LとL3との差が小さくなるので、衝突予想時間(TTC)に大きな影響を与えないが、図7に示す他車両1bの速度Vbが低い場合には、衝突予想時間(TTC)の条件が成立するLが小さくなり、LとL3との差が大きくなる(L>L3)。このため、サービスの提供が遅れる傾向にある。
更にまた、自車両1a又は他車両1bのGPS情報の受信状態が悪い場合に、実際は、図9に示すように、他車両1bの位置Pbが道路内であるにもかかわらず、図10に示すように、自車両1aが道路内で横方向にずれたり、他車両1bの位置Pbが横方向の道路外に位置する、いわゆる位置ずれが生じ、このため、上記の図5に示す幅の広い交差点を走行している場合と同じ現象が起こり、自車両1bの位置Pb又は他車両1bの位置Pbを誤認識してしまうおそれがある。
【0008】
そこで、この発明の目的は、自車両が右折しようとしている交差点の幅が広い場合、また、自車両が右折しようとしているときに他車両が低速で接近してきた場合、更に、自車両が右折しようとしているときに自車両又は他車両のGPS情報の受信状況が悪く他車両の位置を横方向にずれた位置と誤認識した場合でも、適切な衝突予想時間を算出してサービス提供の遅れを軽減する運転支援方法及び運転支援装置を提供することにある。
【課題を解決するための手段】
【0009】
この発明は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて他車両と自車両とが衝突するまでの衝突予想時間を算出する。
【発明の効果】
【0010】
この発明の運転支援方法及び運転支援装置は、自車両が右折しようとしている交差点の幅が広い場合、また、自車両が右折しようとしているときに他車両が低速で接近してきた場合、更に、自車両が右折しようとしているときに自車両又は他車両のGPS情報の受信状況が悪く他車両の位置を横方向にずれた位置と誤認識した場合でも、適切な衝突予想時間を算出してサービス提供の遅れを軽減できる。
【図面の簡単な説明】
【0011】
【図1】図1は運転支援方法のフローチャートである。(実施例)
【図2】図2は運転支援装置のシステム構成図である。(実施例)
【図3】図3は対象車両判定の進行方位の説明図である。(実施例)
【図4】図4は幅の広い交差点で他車両が低速の場合の対象車両判定の進行方位の説明図である。(従来例)
【図5】図5は道幅が広い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図6】図6は道幅が狭い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図7】図7は他車両の速度が低い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図8】図8は他車両の速度が高い場合の交差点で対象車両判定が成立した時の自車両と他車両の位置関係の説明図である。(従来例)
【図9】図9は実際の自車両と他車両の進行方位の説明図である。(従来例)
【図10】図10は自車両又は他車両のGPS情報の受信状態が悪い場合で自車両又は他車両に横方向の位置ずれが生じたときの説明図である。(従来例)
【発明を実施するための形態】
【0012】
この発明は、自車両が右折しようとしている交差点の幅が広い場合、また、自車両が右折しようとしているときに他車両が低速で接近してきた場合、更に、自車両が右折しようとしているときに自車両又は他車両のGPS情報の受信状況が悪く他車両の位置を横方向にずれた位置と誤認識した場合でも、適切な衝突予想時間を算出してサービスの提供の遅れを軽減する目的を、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて衝突予想時間を算出することにより実現するものである。
【実施例】
【0013】
図1〜図3は、この発明の実施例を示すものである。
図2において、1は車両、2はこの車両1に搭載される運転支援装置である。
車両1は、図3に示すように、自車両1aと他車両1bとからなり、夫々運転支援装置2を搭載している。
運転支援装置2は、電子地図を備えていないシステムのものであり、自車両1aの位置を取得する自車両情報取得手段3としてのGPSモジュール4と、他車両1bの位置を取得する他車両情報取得手段5としての通信モジュール6と、情報判定手段7としての判断モジュール8と、運転者情報提供手段9としての情報提供モジュール10とを備え、車両1から電源を受ける。
【0014】
GPSモジュール4は、GPS衛星からGPS情報を受信するように車両1に設けられたGPSアンテナ11に接続し、GPS情報から自車両1aの現在位置を測定することによって自車両1aの位置、進行方位、速度を検出し、この検出した自車両情報を判断モジュール8に送信する。
【0015】
通信モジュール6は、受信手段12と送信手段13とを備え、他車両1bとの間で送受信するように車両1に設けられた通信アンテナ14に接続し、自車両1aと他車両1bとの間で自車両情報及び他車両情報(他車両の位置、進行方位、速度)を送受信する。よって、この通信モジュール6は、車車間通信により他車両1bの位置と進行方位と速度とを取得する他車両情報取得手段5として機能する。なお、他車両1bの位置と進行方位とを取得する手段としては、車車間通信の他に、路車間通信、カメラ画像通信、レーダ通信等を用いることができる。
【0016】
判断モジュール8は、図3に示すように、GPSモジュール4により取得した自車両1aの位置Pa、進行方位Daの自車両情報と、通信モジュール6により取得した他車両1bの位置Pb、進行方位Dbの他車両情報とに基づいて、自車両1aと他車両1bとの衝突可能性を判定する衝突可能性判定手段15と、自車両1aが右折するのか否かを判定する右折判定手段16と、他車両1bと自車両1aとが衝突するまでの衝突予想時間(TTC:Time To Collision)を算出する衝突予想時間算出手段17を備える。
衝突予想時間算出手段17は、自車両1aの位置Paと他車両1bの位置Pbとの間の直線距離Lと、自車両1aの位置Paと他車両1bの位置Pbとを結ぶ直線Sと他車両1bの位置Pbから他車両1aの進行方位Dbへ伸ばした直線S2とがなす角度γとを用いて、他車両1bの位置Pbから他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cを求め、この点Cから他車両1bの位置Pbまでの距離L3と他車両1bの速度Vbとを用いて他車両1bと自車両1aとが衝突するまでの衝突予想時間(TTC)を算出する。
【0017】
この図3において、
αは、自車両1aの進行方位Daと他車両1bの進行方位Dbがなす角度(自車両1aのGPSモジュールから得られる進行方位Da、位置Paの情報と、他車両1bのGPSモジュールから得られる進行方位Db、位置Pbの情報とにより算出された角度)である。
βは、自車両1aの進行方位Daと、自車両1aと他車両1bを結ぶ直線Sとがなす角度(自車両1aのGPSモジュールから得られる進行方位Da、位置Paの情報と、他車両1bのGPSモジュールから得られる進行方位Db、位置Pbの情報とにより算出された角度)である。
L2は、自車両1aの位置Paから他車両1bの進行方位Dbへ伸びて且つこの進行方位Dbに対して直交する直線S3上で、この進行方位Dbの直線S2の点Cまでの最短の距離であり、
L2=L*sinγ
で算出される。
自車両1aの位置Paと他車両1bの位置Pbとを結ぶ直線Sと他車両1bの位置Pbから他車両1aの進行方位Dbへ伸ばした直線S2とがなす角度γは、
γ=180−(α+(360−β))
で算出される。
点Cから他車両1bの位置Pbまでの距離L3は、他車両1bの位置から他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cから他車両1bの位置Pbまでの距離、つまり、他車両1bの位置Pbから他車両1bの進行方向ベクトルが自車両1aに最も接近する点Cまでの距離であり、
L3=L*cosγ
で算出される。
【0018】
この実施例において、衝突予想時間(TTC)は、
TTC(秒)=L3/Vb(秒)
で算出される。
そして、サービス提供のタイミングは、衝突予想時間(TTC)(秒)が規定の値としてのしきい値(m)(秒)未満のときである(TTC<m)。
なお、他車両1bの速度Vbとしては、自車両1aと他車両1bとの相対速度とすることも可能である。
【0019】
情報提供モジュール10は、判断モジュール8から入力するHMI(Human Machine Interface)要求に応じて、スピーカの音声、ブザーの警告音、LEDの点滅等により、運転者に自車両1aが他車両1bと衝突の可能性があるとの情報を提供する。
【0020】
次に、この実施例に係る運転支援について、図1のフローチャートに基づいて説明する。
図1に示すように、運転支援装置2においてプログラムがスタートすると(ステップA01)、先ず、自車両1aが右折しようとしているか否かを判断する(ステップA02)。
このステップA02がYESの場合には、衝突する可能性のある他車両1bが1台以上存在するか否かを判断する(ステップA03)。これは、対象車両判定を意味する。
このステップA03がYESの場合には、衝突予想時間(TTC)を算出する(ステップA04)。
この衝突予想時間(TTC)は、
TTC(秒)=L3/Vb(秒)
で算出される。
そして、最も短い衝突予想時間(TTC)がしきい値(m)未満か否かを判断する(ステップA05)。
このステップA05がYESの場合には、プログラムをエンドとする(ステップA06)。
また、前記ステップA02がNOの場合、前記ステップA03がNOの場合、前記ステップA05がNOの場合にも、プログラムをエンドとする(ステップA06)。
【0021】
この結果、この実施例では、衝突予想時間(TTC)の算出のために、他車両1bの位置Pbから他車両1bの進行方位Dbへ伸ばした直線S2上に位置し且つ自車両1aの位置Paと最短となる点Cから他車両1bの位置Pbまでの距離L3を用いている。
これにより、自車両1aが右折しようとしている交差点の幅が広く、他車両1bの速度が低い場合でも、適切な衝突予想時間(TTC)を算出することができる。よって、適切なタイミングで運転者への情報のサービス提供を行うことができる。
また、自車両1aが右折しようとしている時に、他車両1bが低速で接近してきても、適切な衝突予想時間を算出することができる。よって、適切なタイミングで運転者へ他車両の接近情報を提供することができる。
更に、自車両1aが右折しようとしている時に、自車両1a又は他車両1bのGPS情報の受信状況が悪く、自車両1aの位置Pa又は他車両1bの位置Pbを横方向にずれた位置と誤認識しても、衝突予想時間(TTC)を算出することができる。よって、自車両1a又は他車両1bのGPS情報の受信状況が悪く、横方向の位置ずれを起こし、幅の広い道路を走行しているのと似たような状態になったときに、サービス提供が交差点の間近でされ、若しくはサービス提供がされなくなるような状況を回避し、適切なタイミングで運転者へ他車両の接近情報のサービスを提供行うことができる。従って、サービス提供の遅れを緩和する効果が見込めるので、都市部等のGPS情報の受信状況が悪い道路においても、効果を期待できる。
また、他車両情報取得手段5としての通信モジュール6は、車車間通信により他車両1bの位置Pbと進行方位Dbと速度Vbとを取得する。これにより、正確な他車両1bの位置Pbと進行方位Dbと速度Vbとを取得することができる。
【産業上の利用可能性】
【0022】
この発明の運転支援方法及び運転支援装置は、運転者に適切なサービス提供を行うものであり、各種車両に適用できる。
【符号の説明】
【0023】
1 車両
1a 自車両
1b 他車両
2 運転支援装置
3 自車両情報取得手段
4 GPSモジュール
5 他車両情報取得手段
6 通信モジュール
7 情報判定手段
8 判断モジュール
9 運転者情報提供手段
10 情報提供モジュール
11 GPSアンテナ
12 受信手段
13 送信手段
14 通信アンテナ
15 衝突可能性判定手段
16 右折判定手段
17 衝突予想時間算出手段
【特許請求の範囲】
【請求項1】
自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて他車両と自車両とが衝突するまでの衝突予想時間を算出することを特徴とする運転支援方法。
【請求項2】
他車両と自車両とが衝突するまでの衝突予想時間を算出する衝突予想時間算出手段を備える運転支援装置において、自車両の位置を取得する自車両情報取得手段と、他車両の位置と進行方位と速度とを取得する他車両情報取得手段とを備え、前記衝突予想時間算出手段は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて他車両と自車両とが衝突するまでの衝突予想時間を算出することを特徴とする運転支援装置。
【請求項3】
前記他車両情報取得手段は、車車間通信により他車両の位置と進行方位と走行速度とを取得することを特徴とする請求項2に記載の運転支援装置。
【請求項1】
自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて他車両と自車両とが衝突するまでの衝突予想時間を算出することを特徴とする運転支援方法。
【請求項2】
他車両と自車両とが衝突するまでの衝突予想時間を算出する衝突予想時間算出手段を備える運転支援装置において、自車両の位置を取得する自車両情報取得手段と、他車両の位置と進行方位と速度とを取得する他車両情報取得手段とを備え、前記衝突予想時間算出手段は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線上に位置し且つ自車両の位置と最短となる点を求め、この点から他車両の位置までの距離と他車両の速度とを用いて他車両と自車両とが衝突するまでの衝突予想時間を算出することを特徴とする運転支援装置。
【請求項3】
前記他車両情報取得手段は、車車間通信により他車両の位置と進行方位と走行速度とを取得することを特徴とする請求項2に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−197706(P2011−197706A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−60276(P2010−60276)
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]