
運転支援装置、および、運転支援システム
【課題】車両を案内する方向を地図データベースを備えることなく提示する。
【解決手段】運転支援装置11は、他車両から送信された現在位置情報および現在高度情報を情報受信処理部22によって受信し、他車両の現在位置における高度を高度特定処理部23によって特定し、高度記憶処理部24によって、特定した高度を現在位置に対応付けて記憶し、記憶した位置および高度に基づいて自車両を案内する案内方向を案内方向特定処理部25によって特定し、特定した案内方向を案内方向提示処理部26によって提示する。
【解決手段】運転支援装置11は、他車両から送信された現在位置情報および現在高度情報を情報受信処理部22によって受信し、他車両の現在位置における高度を高度特定処理部23によって特定し、高度記憶処理部24によって、特定した高度を現在位置に対応付けて記憶し、記憶した位置および高度に基づいて自車両を案内する案内方向を案内方向特定処理部25によって特定し、特定した案内方向を案内方向提示処理部26によって提示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を案内する方向を提示する運転支援装置、および、当該運転支援装置から構成される運転支援システムに関する。
【背景技術】
【0002】
従来より、例えば災害発生時などに、車両を避難ポイントに案内するための技術が考えられている。例えば、特許文献1には、災害により不通となった区間を考慮した避難経路を案内する情報通知システムが開示されている。また、特許文献2には、地震発生時に、予め定められた避難場所のうち最近接する避難場所までの避難経路を表示する制御システムが開示されている。
しかしながら、これらの従来技術は、何れも地図データベースに基づいて避難経路を決定している。そのため、地図データベースを備える装置、例えば、カーナビゲーション装置を車両に搭載していることが前提の技術であり、このようなカーナビゲーション装置を備えていない車両では実施することができない技術である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−54895号公報
【特許文献2】特開2010−15481号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は上記した事情に鑑みてなされたものであり、その目的は、車両を案内する方向を地図データベースを備えることなく提示する運転支援装置、および、当該運転支援装置から構成される運転支援システムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載した発明によれば、運転支援装置は、情報受信手段によって、他車両から送信された当該他車両の現在位置を特定する現在位置情報および当該他車両の現在高度を特定する現在高度情報を受信し、高度特定手段によって、情報受信手段が受信した現在位置情報および現在高度情報に基づいて、当該現在位置情報によって特定される位置における高度を当該現在高度情報によって特定する。そして、運転支援装置は、高度記憶手段によって、高度特定手段が特定した高度を現在位置情報によって特定される位置に対応付けて記憶し、その記憶した位置および高度に基づいて、案内方向特定手段によって、自車両を案内する方向を案内方向として特定し、案内方向提示手段によって、案内方向特定手段が特定した案内方向を提示する。
即ち、この運転支援装置では、他車両から受信した現在位置情報および現在高度情報に基づいて自車両周辺の各位置の高度を記憶し、その記憶した各位置の高度に基づいて自車両の案内方向を特定して提示する。これにより、車両を案内する方向を地図データベースを備えることなく提示することができる。
【0006】
請求項2に記載した発明によれば、案内方向特定手段は、高度記憶手段に記憶された位置および高度に基づいて誘導ポイントを特定し、その誘導ポイントに自車両を案内する方向を、案内方向として特定する。これにより、運転支援装置が提示する案内方向を、自車両周辺の各位置の高度に基づいて特定した「誘導ポイント」に自車両を導く方向に具体化することができる。
【0007】
この場合、請求項3に記載した発明のように、災害情報取得手段が外部から取得した災害情報も考慮して避難ポイントを特定し、その避難ポイントを誘導ポイントとして設定することができる。この請求項3に記載の発明は、例えば災害発生時などに対応すべく、運転支援装置が提示する案内方向を、外部から取得した災害情報と自車両周辺の各位置の高度とに基づいて特定した「避難ポイント」に自車両を案内する方向に具体化したものである。
【0008】
ところで、例えば地震や津波などの災害発生時においては、現在位置に最も近い避難ポイントに避難することが一般的に考えられる。しかし、その最も近い避難ポイントに向かう方向に高度の低い地点が含まれる場合には、その方向が安全な避難方向であるとはいえない。そのため、例えば、現在位置から遠い避難ポイントであっても、その避難ポイントに向かう方向に高度の低い地点が含まれないのであれば、その遠い避難ポイントに向かって避難した方が安全である。
そこで、請求項4に記載した発明では、案内方向特定手段は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向のうち高度の低い地点が相対的に少ない方向を案内方向として特定する。
これにより、高度の低い地点が極力少ない避難方向が案内されるようになり、より安全な運転支援を行うことができる。
【0009】
この場合、請求項5に記載した発明のように、案内方向特定手段は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向について、各方向に沿う地形の傾斜度合いを示す傾斜値をそれぞれ積算し、その積算値が相対的に大きくなる方向を案内方向として特定するように構成するとよい。この請求項4に記載した発明は、高度の低い地点が極力少ない方向を案内方向として特定するための処理の一例を具体的に特定したものである。
【0010】
請求項6に記載した発明は、複数の車両に搭載された複数の運転支援装置から構成される運転支援システムに係る発明であり、複数の運転支援装置間で、各車両の現在位置を特定する現在位置情報および現在高度を特定する現在高度情報を送受信することで、各車両において、それぞれ地図データベースを用いることなく案内方向を提示することを可能としたものである。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係る運転支援システムの全体構成を概略的に示す図
【図2】運転支援装置の構成を概略的に示す機能ブロック図
【図3】運転支援装置の外観を概略的に示す斜視図
【図4】高度地図の一例を示す図
【図5】案内方向提示動作の内容を示すフローチャート
【図6】案内方向特定処理の内容を示すフローチャート
【図7】案内方向を特定するための図であり、(a)は高度変化分布図、(b)は傾斜分布図
【発明を実施するための形態】
【0012】
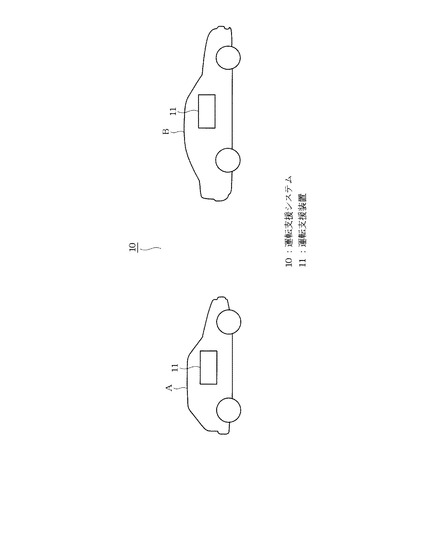
以下、本発明の一実施形態について図面を参照して説明する。図1に示すように、運転支援システム10は、複数の車両に搭載された複数の運転支援装置11から構成されている。なお、図1では、説明の便宜上、他車両Bに搭載された運転支援装置として1台の運転支援装置11のみを示しているが、自車両Aの周辺、つまり、自車両Aから所定範囲内には、他車両B、換言すれば、他車両Bに搭載された運転支援装置11が多数存在している。この所定範囲としては適宜の範囲を設定することができる。
【0013】
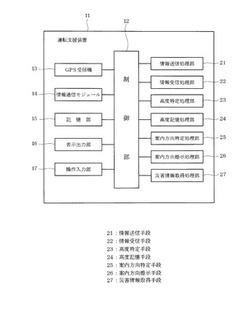
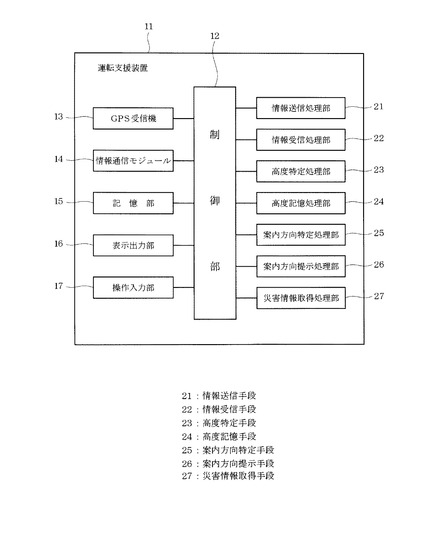
次に、各運転支援装置11の構成について図2を参照して説明する。なお、各車両に搭載された各運転支援装置11の構成は、この場合、何れも同一の構成となっている。
各車両に搭載された運転支援装置11は、それぞれ、制御部12、GPS受信機13(GPS:Global Positioning System)、情報通信モジュール14、記憶部15、表示出力部16、操作入力部17などを備えている。
制御部12は、図示しないCPU、RAM、ROMおよびI/Oバスなどを有するマイクロコンピュータを主体として構成されている。制御部12は、ROMあるいは記憶部15などに記憶されているコンピュータプログラムに従って、情報通信動作や情報管理動作、ならびに、後述する案内方向提示動作など運転支援装置11の動作全般を制御する。
【0014】
また、この制御部12は、コンピュータプログラムを実行することにより、情報送信処理部21、情報受信処理部22、高度特定処理部23、高度記憶処理部24、案内方向特定処理部25、案内方向提示処理部26、災害情報取得処理部27をソフトウェアによって仮想的に実現する。なお、情報送信処理部21は、特許請求の範囲に記載した情報送信手段に相当し、情報受信処理部22は、特許請求の範囲に記載した情報受信手段に相当し、高度特定処理部23は、特許請求の範囲に記載した高度特定手段に相当し、高度記憶処理部24は、特許請求の範囲に記載した高度記憶手段に相当し、案内方向特定処理部25は、特許請求の範囲に記載した案内方向特定手段に相当し、案内方向提示処理部26は、特許請求の範囲に記載した案内方向提示手段に相当し、災害情報取得処理部27は、特許請求の範囲に記載した災害情報取得手段に相当する。
【0015】
GPS受信機13は、図示しないGPS衛星から送信される電波を受信することで、自車両の現在位置を特定する現在位置情報および自車両の現在高度、つまり、現在位置の高度を特定する現在高度情報を取得する。
情報通信モジュール14は、他車両に搭載された運転支援装置11との間で各種の情報を送受信する。また、災害情報取得処理部27は、この情報通信モジュール14を介して、例えば地震や津波などの災害発生時に図示しない緊急通報システムから送信される緊急通報情報を受信する。この緊急通報情報は、特許請求の範囲に記載した災害情報の一例である。
【0016】
記憶部15は、例えばハードディスクドライブやメモリカードなどの記憶媒体で構成されており、各種の情報を記憶する記憶領域を有している。
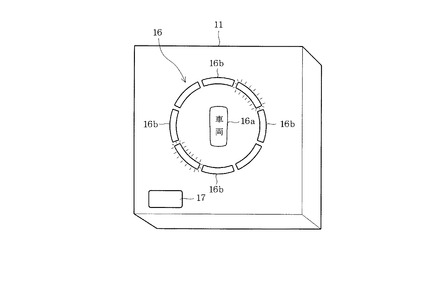
表示出力部16は、この場合、図3に示すように、運転支援装置11の本体に一体的に組み込まれている。この表示出力部16は、自車両マーク16aと、この自車両マーク16aの周囲に配置された複数の発光部16bとから構成されている。自車両マーク16aは、運転支援装置11が搭載された車両、つまり、自車両Aを概念的に示すマークである。発光部16bは、例えばLEDなどの発光素子を備えており、制御部12から与えられる発光指令信号に応じて発光するようになっている。なお、この場合、運転支援装置11の上下方向が自車両Aの前後方向に対応し、運転支援装置11の左右方向が自車両Aの左右方向に対応している。
【0017】
操作入力部17は、この場合、図3に示すように、運転支援装置11の本体に押圧可能に組み込まれおり、ユーザの手動操作によって押圧されるようになっている。
なお、本実施形態では、表示出力部16および操作入力部17を上記したようにメカニカルな構成とする例を示したが、例えば、表示出力部16は、液晶パネルなどに画像として設ける構成としてもよいし、操作入力部17は、液晶パネルなどにタッチスイッチとして設ける構成としてもよい。
【0018】
情報送信処理部21は、自車両の現在位置を特定する現在位置情報および自車両の現在高度を特定する現在高度情報、つまり、GPS受信機13により受信した現在位置情報および現在高度情報を、情報通信モジュール14を介して送信する。
情報受信処理部22は、他車両から送信された当該他車両の現在位置を特定する現在位置情報、つまり、他車両に搭載された運転支援装置11が当該運転支援装置11が備える情報送信処理部21によって送信した現在位置情報、および、他車両の現在高度を特定する現在高度情報、つまり、他車両に搭載された運転支援装置11が当該運転支援装置11が備える情報送信処理部21によって送信した現在高度情報を、情報通信モジュール14を介して受信する。
高度特定処理部23は、情報受信処理部22が受信した他車両の現在位置情報および他車両の現在高度情報に基づいて、その現在位置情報によって特定される位置における高度を、その現在高度情報によって特定する。
【0019】
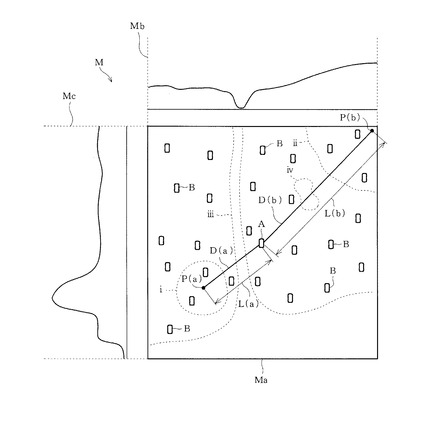
高度記憶処理部24は、高度特定処理部23が特定した高度を、その高度が特定された位置、つまり、現在位置情報によって特定される位置に対応付けて記憶することで、図4に示す高度地図Mを生成する。この高度地図Mには、高度特定処理部23が特定した高度、つまり、自車両Aの周辺に存在する他車両Bの現在高度が、その他車両Bの現在位置情報によって特定される位置に対応付けて記憶される。また、この高度地図Mには、自車両Aの現在高度情報によって特定される現在高度が、その自車両Aの現在位置情報によって特定される位置に対応付けて記憶される。このように生成された高度地図Mは、制御部12のRAMあるいは記憶部15に格納される。
【0020】
図4に示すように、この高度地図Mは、車両分布図Ma、横方向高度分布図Mb、および、縦方向高度分布図Mcを有する。車両分布図Maでは、自車両Aの現在位置が当該車両分布図Maのほぼ中心部に配置されるとともに、その自車両Aの現在位置を中心として当該自車両Aの周囲に存在する複数の他車両Bの現在位置が配置される。横方向高度分布図Mbでは、車両分布図Maに配置された自車両Aの現在高度および複数の他車両Bの現在高度が車両分布図Maの横方向に沿って各車両の現在位置に対応付けられて分布する。そして、これら各車両の現在高度を相互に補間しながら連結することで横方向高度分布図Mbに示すような地形図が得られる。縦方向高度分布図Mcでは、車両分布図Maに配置された自車両Aの現在高度および複数の他車両Bの現在高度が車両分布図Maの縦方向に沿って各車両の現在位置に対応付けられて分布する。そして、これら各車両の現在高度を相互に補間しながら連結することで縦方向高度分布図Mcに示すような地形図が得られる。
なお、この場合、車両分布図Maの左下部分に符号(i)で示す「山」が存在し、右上部分に符号(ii)で示す「丘」が存在し、自車両Aの現在位置よりも山(i)側、この場合、左側に位置して符号(iii)で示す「川」が存在し、丘(ii)と川(iii)との間に位置して符号(iv)で示す「池」が存在しているものとする。
【0021】
このようにして高度記憶処理部24によって生成される高度地図Mは、自車両Aの現在位置が随時変化すること伴い、また、他車両Bから当該他車両Bの現在位置情報および現在高度情報を随時受信することに伴い、常に最新の状態に書き換えられるようになっている。なお、この高度地図Mにおける横方向には、例えば、東西方向、経度方向、自車両Aの左右方向などを対応付けることができる。また、この高度地図Mにおける縦方向には、例えば、南北方向、緯度方向、自車両Aの前後方向などを対応付けることができる。
【0022】
案内方向特定処理部25は、上記のようにして高度記憶処理部24が記憶した各車両の位置情報および高度情報に基づいて生成した高度地図Mに基づいて、自車両Aを案内する方向を案内方向として特定する。この案内方向を特定するための具体的処理内容については、後述する動作説明にて説明する。
案内方向提示処理部26は、案内方向特定処理部25が特定した案内方向を表示出力部16を介してユーザに提示する。この場合、案内方向提示処理部26は、図3に示すように、特定した案内方向に対応する発光部16bを発光させることで、その案内方向をユーザに提示するようになっている。この場合、案内方向提示処理部26は、特定された案内方向が複数存在する場合には、後述するようにして決定した第1候補の案内方向に対応する発光部16bを、例えば安全であることを想起させ易い色である「緑色」や「青色」で発光させ、第2候補の案内方向に対応する発光部16bを、例えば注意を喚起させ易い色である「赤色」や「黄色」や「橙色」で発光させるようになっている。
【0023】
次に、上記した構成の運転支援システム10の動作、つまり、案内方向提示動作について、図5に示すフローチャートを参照して説明する。
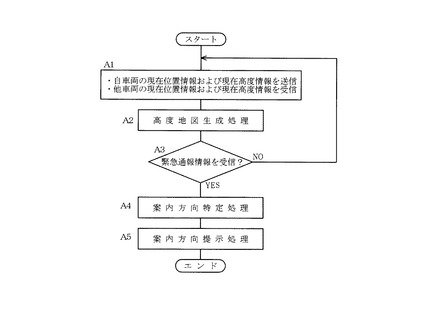
各車両に搭載された運転支援装置11の制御部12は、自車両の現在位置情報および現在高度情報を送信する情報送信処理、および、自車両の周辺に存在する他車両から送信された当該他車両の現在位置情報および現在高度情報を受信する情報受信処理を常時実行している(ステップA1)。また、各車両の制御部12は、それぞれ高度地図生成処理を常時あるいは定期的に実行している(ステップA2)。この高度地図生成処理では、制御部12は、その時点における自車両の現在位置情報および現在高度情報と、その時点で自車両の周辺に存在する他車両から受信している当該他車両の現在位置情報および現在高度情報とに基づいて、自車両および他車両の現在位置および現在高度を配置した高度地図Mを生成する。そして、各車両の制御部12は、それぞれ高度地図Mを生成すると、図示しない緊急通報システムから緊急通報情報を受信したか否かを監視する(ステップA3)。
【0024】
そして、各車両の制御部12は、緊急通報情報を受信すると(ステップA3:YES)、案内方向特定処理を実行する(ステップA4)。この案内方向特定処理では、制御部12は、生成した高度地図Mに基づいて、自車両を案内する方向を案内方向として特定する。ここで、この案内方向特定処理の内容について、図6に示すフローチャートを参照して説明する。
【0025】
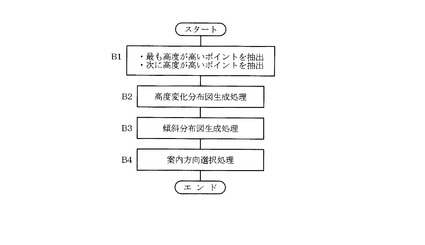
即ち、制御部12は、生成した高度地図Mのうち最も高度が高いポイント、この場合、山(i)の頂上を、図4に示すように誘導ポイントの候補である避難ポイント候補P(a)として抽出するとともに、当該避難ポイント候補P(a)の次に高度が高いポイント、この場合、丘(ii)の上を、図4に示すように誘導ポイントの候補である避難ポイント候補P(b)として抽出する(ステップB1)。この場合、自車両Aの現在位置から避難ポイント候補P(a)までの距離L(a)は、自車両Aの現在位置から避難ポイント候補P(b)までの距離L(b)よりも短くなっている。即ち、この場合、避難ポイント候補P(a)が自車両Aの現在位置から最も近い避難ポイントである。
【0026】
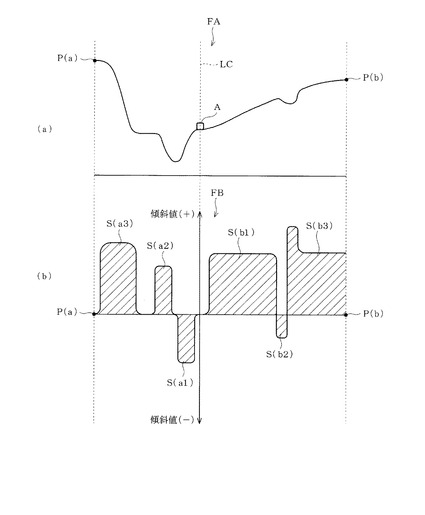
次に、制御部12は、高度変化分布図生成処理を実行する(ステップB2)。この高度変化分布図生成処理では、制御部12は、自車両の現在位置から避難ポイント候補P(a)に向かう避難方向D(a)における各地点の高度、および、自車両の現在位置から避難ポイント候補P(b)に向かう避難方向D(b)における各地点の高度を示す高度変化分布図FAを生成する。図7(a)は、この高度変化分布図FAの一例を示しており、この場合、自車両Aの現在位置を通過する境界線LCよりも左側が図4に示す避難方向D(a)に対応し、境界線LCよりも右側が図4に示す避難方向D(b)に対応する。
【0027】
次に、制御部12は、傾斜分布図生成処理を実行する(ステップB3)。この傾斜分布図生成処理では、制御部12は、生成した高度変化分布図FAの各地点における地形の傾斜度合いを示す傾斜値k、つまり、各地点における接線の傾きを算出し、その算出した傾斜値kをプロットした傾斜分布図FBを生成する。図7(b)は、この傾斜分布図FBの一例を示している。この図7(b)に示す傾斜分布図FBは、図7(a)に示す高度変化分布図FAに対応しており、自車両Aの現在位置を通過する境界線LCよりも左側が図4に示す避難方向D(a)に対応し、境界線LCよりも右側が図4に示す避難方向D(b)に対応する。
【0028】
次に、制御部12は、案内方向選択処理を実行する。この案内方向選択処理では、制御部12は、上記の傾斜分布図FBに基づいて各避難方向D(a),D(b)における高度の変化の態様、つまり、地形の傾斜度合いの変化の態様を把握し、把握した高度変化、換言すれば、傾斜の変化の態様に基づいて、より安全な避難方向、即ち、自車両Aを案内する方向としてより安全な案内方向を選択する。即ち、制御部12は、傾斜分布図FBのうち避難方向D(a)に対応する面積S(a)、つまり、避難方向D(a)の各地点における傾斜値kを積算した積算値であり図7(b)に示す面積S(a1),S(a2),S(a3)の和と、傾斜分布図FBのうち避難方向D(b)に対応する面積S(b)、つまり、避難方向D(b)の各地点における傾斜値kを積算した積算値であり図7(b)に示す面積S(b1),S(b2),S(b3)の和とを比較する。
【0029】
そして、制御部12は、その積算値がより大きくなる避難方向を選択する。つまり、制御部12は、自車両Aを避難ポイント候補P(a)に案内する避難方向D(a)、および、自車両Aを避難ポイント候補P(b)に案内する避難方向D(b)のうち、高度の低い地点がより少ない方向を選択するのである。この場合、避難方向D(a)に対応する面積S(a)よりも避難方向D(b)に対応する面積S(b)の方が大きいことから、制御部12は、避難方向D(b)を選択する。そして、制御部12は、その選択した避難方向D(b)、つまり、避難ポイント候補P(b)が存在する方向である自車両Aの右前方を、第1候補の案内方向として選択する。また、制御部12は、選択しなかった避難方向D(a)、つまり、避難ポイント候補P(a)が存在する方向である自車両Aの左後方を第2候補の案内方向として選択する。制御部12は、第1候補の案内方向および第2候補の案内方向を特定すると、この案内方向特定処理を終了する。
【0030】
制御部12は、案内方向特定処理を終了すると、案内情報提示処理を実行する(ステップA5)。この案内情報提示処理では、制御部12は、図3に示すように、上記の案内方向特定処理にて決定した第1候補の案内方向、この場合、自車両Aの右前方に対応する発光部16bを、例えば安全であることを想起させ易い色である「緑色」や「青色」で発光させ、第2候補の案内方向、この場合、自車両Aの左後方に対応する発光部16bを、例えば注意を喚起させ易い色である「赤色」や「黄色」や「橙色」で発光させる。
【0031】
以上に説明したように本実施形態によれば、運転支援装置11は、自車両の現在位置情報および現在高度情報と、他車両から受信した現在位置情報および現在高度情報とに基づいて自車両周辺の高度を示す高度地図Mを生成し、その高度地図Mに基づいて自車両の案内方向を特定して提示する。これにより、車両を案内する方向を運転支援装置11に地図データベースを備えることなく提示することができる。
【0032】
また、本実施形態によれば、運転支援装置11は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向のうち高度の低い地点が相対的に少ない方向を案内方向として特定する。また、本実施形態によれば、運転支援装置11は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向について、各方向に沿う地形の傾斜度合いを示す傾斜値kをそれぞれ積算し、その積算値が相対的に大きくなる方向を案内方向として特定する。
これにより、高度の低い地点が極力少ない避難方向が案内されるようになり、より安全な運転支援を行うことができる。
【0033】
また、本実施形態に係る複数の運転支援装置11から構成される運転支援システム10によれば、複数の運転支援装置11間で、各車両の現在位置を特定する現在位置情報および現在高度を特定する現在高度情報を送受信する。これにより、各車両の運転支援装置11において、それぞれ地図データベースを備えることなく案内方向を提示することが可能となる。
【0034】
本実施形態は、例えば災害発生時などに対応すべく、運転支援装置11が提示する案内方向として、高度地図Mに基づいて特定した「避難ポイント」に自車両を案内する方向を提示する実施形態を具体的に例示したものである。そして、本実施形態では、自車両を避難ポイントに導く具体的な避難経路を提示するのではなく、その避難ポイントが存在する「方向」を提示する構成とした。災害発生時においては、一刻も早く避難ポイントに避難する必要があり、従って、具体的な避難経路が提示されたとしても、その避難経路を確認する時間的な余裕はない。本実施形態によれば、具体的な避難経路ではなく、避難ポイントが存在する「方向」を提示するようにしたので、使用者は、まずはその方向に向かって避難を開始することで避難ポイントに近付くことができ、緊急を要する災害発生時において有効な運転支援を行うことができる。
【0035】
なお、本発明は、上述した一実施形態のみに限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば、以下のように変形または拡張することができる。
上述した案内方向提示動作は、操作入力部17が手動操作されたことをトリガとして実行するように構成してもよい。災害発生時では、緊急通報システム自体が適切に機能しなくなることも想定される。この構成によれば、手動操作によって案内方向を提示することが可能となり、緊急通報システムに依存することなく車両を案内することができる。
【0036】
車両を誘導する誘導ポイントは、「避難ポイント」に限られるものではなく、例えば、空きスペースが多い駐車場や低料金の駐車場、ユーザの好みに応じた娯楽施設、コンビニエンスストア、ガソリンスタンドなど、種々のポイントを誘導ポイントとして設定することができる。このような誘導ポイントを設定するための情報、例えば、駐車場の空きスペースや料金に関する情報、ユーザの好みに応じた施設や店舗などを特定するための情報などは、例えば情報通信モジュール14を介して外部の情報提供サーバから取得する構成としてもよいし、あるいは、ユーザが好みの施設や店舗などを予め運転支援装置11に登録しておく構成としてもよい。これにより、多少遠くても、空きスペースが多い駐車場、料金が安い駐車場、ユーザの好みに応じた施設や店舗など、ユーザにとってより好ましいポイントに自車両を誘導することができるようになる。
【符号の説明】
【0037】
図面中、10は運転支援システム、11は運転支援装置、21は情報送信処理部(情報送信手段)、22は情報受信処理部(情報受信手段)、23は高度特定処理部(高度特定手段)、24は高度記憶処理部(高度記憶手段)、25は案内方向特定処理部(案内方向特定手段)、26は案内方向提示処理部(案内方向提示手段)を示す。
【技術分野】
【0001】
本発明は、車両を案内する方向を提示する運転支援装置、および、当該運転支援装置から構成される運転支援システムに関する。
【背景技術】
【0002】
従来より、例えば災害発生時などに、車両を避難ポイントに案内するための技術が考えられている。例えば、特許文献1には、災害により不通となった区間を考慮した避難経路を案内する情報通知システムが開示されている。また、特許文献2には、地震発生時に、予め定められた避難場所のうち最近接する避難場所までの避難経路を表示する制御システムが開示されている。
しかしながら、これらの従来技術は、何れも地図データベースに基づいて避難経路を決定している。そのため、地図データベースを備える装置、例えば、カーナビゲーション装置を車両に搭載していることが前提の技術であり、このようなカーナビゲーション装置を備えていない車両では実施することができない技術である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−54895号公報
【特許文献2】特開2010−15481号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は上記した事情に鑑みてなされたものであり、その目的は、車両を案内する方向を地図データベースを備えることなく提示する運転支援装置、および、当該運転支援装置から構成される運転支援システムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載した発明によれば、運転支援装置は、情報受信手段によって、他車両から送信された当該他車両の現在位置を特定する現在位置情報および当該他車両の現在高度を特定する現在高度情報を受信し、高度特定手段によって、情報受信手段が受信した現在位置情報および現在高度情報に基づいて、当該現在位置情報によって特定される位置における高度を当該現在高度情報によって特定する。そして、運転支援装置は、高度記憶手段によって、高度特定手段が特定した高度を現在位置情報によって特定される位置に対応付けて記憶し、その記憶した位置および高度に基づいて、案内方向特定手段によって、自車両を案内する方向を案内方向として特定し、案内方向提示手段によって、案内方向特定手段が特定した案内方向を提示する。
即ち、この運転支援装置では、他車両から受信した現在位置情報および現在高度情報に基づいて自車両周辺の各位置の高度を記憶し、その記憶した各位置の高度に基づいて自車両の案内方向を特定して提示する。これにより、車両を案内する方向を地図データベースを備えることなく提示することができる。
【0006】
請求項2に記載した発明によれば、案内方向特定手段は、高度記憶手段に記憶された位置および高度に基づいて誘導ポイントを特定し、その誘導ポイントに自車両を案内する方向を、案内方向として特定する。これにより、運転支援装置が提示する案内方向を、自車両周辺の各位置の高度に基づいて特定した「誘導ポイント」に自車両を導く方向に具体化することができる。
【0007】
この場合、請求項3に記載した発明のように、災害情報取得手段が外部から取得した災害情報も考慮して避難ポイントを特定し、その避難ポイントを誘導ポイントとして設定することができる。この請求項3に記載の発明は、例えば災害発生時などに対応すべく、運転支援装置が提示する案内方向を、外部から取得した災害情報と自車両周辺の各位置の高度とに基づいて特定した「避難ポイント」に自車両を案内する方向に具体化したものである。
【0008】
ところで、例えば地震や津波などの災害発生時においては、現在位置に最も近い避難ポイントに避難することが一般的に考えられる。しかし、その最も近い避難ポイントに向かう方向に高度の低い地点が含まれる場合には、その方向が安全な避難方向であるとはいえない。そのため、例えば、現在位置から遠い避難ポイントであっても、その避難ポイントに向かう方向に高度の低い地点が含まれないのであれば、その遠い避難ポイントに向かって避難した方が安全である。
そこで、請求項4に記載した発明では、案内方向特定手段は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向のうち高度の低い地点が相対的に少ない方向を案内方向として特定する。
これにより、高度の低い地点が極力少ない避難方向が案内されるようになり、より安全な運転支援を行うことができる。
【0009】
この場合、請求項5に記載した発明のように、案内方向特定手段は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向について、各方向に沿う地形の傾斜度合いを示す傾斜値をそれぞれ積算し、その積算値が相対的に大きくなる方向を案内方向として特定するように構成するとよい。この請求項4に記載した発明は、高度の低い地点が極力少ない方向を案内方向として特定するための処理の一例を具体的に特定したものである。
【0010】
請求項6に記載した発明は、複数の車両に搭載された複数の運転支援装置から構成される運転支援システムに係る発明であり、複数の運転支援装置間で、各車両の現在位置を特定する現在位置情報および現在高度を特定する現在高度情報を送受信することで、各車両において、それぞれ地図データベースを用いることなく案内方向を提示することを可能としたものである。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係る運転支援システムの全体構成を概略的に示す図
【図2】運転支援装置の構成を概略的に示す機能ブロック図
【図3】運転支援装置の外観を概略的に示す斜視図
【図4】高度地図の一例を示す図
【図5】案内方向提示動作の内容を示すフローチャート
【図6】案内方向特定処理の内容を示すフローチャート
【図7】案内方向を特定するための図であり、(a)は高度変化分布図、(b)は傾斜分布図
【発明を実施するための形態】
【0012】
以下、本発明の一実施形態について図面を参照して説明する。図1に示すように、運転支援システム10は、複数の車両に搭載された複数の運転支援装置11から構成されている。なお、図1では、説明の便宜上、他車両Bに搭載された運転支援装置として1台の運転支援装置11のみを示しているが、自車両Aの周辺、つまり、自車両Aから所定範囲内には、他車両B、換言すれば、他車両Bに搭載された運転支援装置11が多数存在している。この所定範囲としては適宜の範囲を設定することができる。
【0013】
次に、各運転支援装置11の構成について図2を参照して説明する。なお、各車両に搭載された各運転支援装置11の構成は、この場合、何れも同一の構成となっている。
各車両に搭載された運転支援装置11は、それぞれ、制御部12、GPS受信機13(GPS:Global Positioning System)、情報通信モジュール14、記憶部15、表示出力部16、操作入力部17などを備えている。
制御部12は、図示しないCPU、RAM、ROMおよびI/Oバスなどを有するマイクロコンピュータを主体として構成されている。制御部12は、ROMあるいは記憶部15などに記憶されているコンピュータプログラムに従って、情報通信動作や情報管理動作、ならびに、後述する案内方向提示動作など運転支援装置11の動作全般を制御する。
【0014】
また、この制御部12は、コンピュータプログラムを実行することにより、情報送信処理部21、情報受信処理部22、高度特定処理部23、高度記憶処理部24、案内方向特定処理部25、案内方向提示処理部26、災害情報取得処理部27をソフトウェアによって仮想的に実現する。なお、情報送信処理部21は、特許請求の範囲に記載した情報送信手段に相当し、情報受信処理部22は、特許請求の範囲に記載した情報受信手段に相当し、高度特定処理部23は、特許請求の範囲に記載した高度特定手段に相当し、高度記憶処理部24は、特許請求の範囲に記載した高度記憶手段に相当し、案内方向特定処理部25は、特許請求の範囲に記載した案内方向特定手段に相当し、案内方向提示処理部26は、特許請求の範囲に記載した案内方向提示手段に相当し、災害情報取得処理部27は、特許請求の範囲に記載した災害情報取得手段に相当する。
【0015】
GPS受信機13は、図示しないGPS衛星から送信される電波を受信することで、自車両の現在位置を特定する現在位置情報および自車両の現在高度、つまり、現在位置の高度を特定する現在高度情報を取得する。
情報通信モジュール14は、他車両に搭載された運転支援装置11との間で各種の情報を送受信する。また、災害情報取得処理部27は、この情報通信モジュール14を介して、例えば地震や津波などの災害発生時に図示しない緊急通報システムから送信される緊急通報情報を受信する。この緊急通報情報は、特許請求の範囲に記載した災害情報の一例である。
【0016】
記憶部15は、例えばハードディスクドライブやメモリカードなどの記憶媒体で構成されており、各種の情報を記憶する記憶領域を有している。
表示出力部16は、この場合、図3に示すように、運転支援装置11の本体に一体的に組み込まれている。この表示出力部16は、自車両マーク16aと、この自車両マーク16aの周囲に配置された複数の発光部16bとから構成されている。自車両マーク16aは、運転支援装置11が搭載された車両、つまり、自車両Aを概念的に示すマークである。発光部16bは、例えばLEDなどの発光素子を備えており、制御部12から与えられる発光指令信号に応じて発光するようになっている。なお、この場合、運転支援装置11の上下方向が自車両Aの前後方向に対応し、運転支援装置11の左右方向が自車両Aの左右方向に対応している。
【0017】
操作入力部17は、この場合、図3に示すように、運転支援装置11の本体に押圧可能に組み込まれおり、ユーザの手動操作によって押圧されるようになっている。
なお、本実施形態では、表示出力部16および操作入力部17を上記したようにメカニカルな構成とする例を示したが、例えば、表示出力部16は、液晶パネルなどに画像として設ける構成としてもよいし、操作入力部17は、液晶パネルなどにタッチスイッチとして設ける構成としてもよい。
【0018】
情報送信処理部21は、自車両の現在位置を特定する現在位置情報および自車両の現在高度を特定する現在高度情報、つまり、GPS受信機13により受信した現在位置情報および現在高度情報を、情報通信モジュール14を介して送信する。
情報受信処理部22は、他車両から送信された当該他車両の現在位置を特定する現在位置情報、つまり、他車両に搭載された運転支援装置11が当該運転支援装置11が備える情報送信処理部21によって送信した現在位置情報、および、他車両の現在高度を特定する現在高度情報、つまり、他車両に搭載された運転支援装置11が当該運転支援装置11が備える情報送信処理部21によって送信した現在高度情報を、情報通信モジュール14を介して受信する。
高度特定処理部23は、情報受信処理部22が受信した他車両の現在位置情報および他車両の現在高度情報に基づいて、その現在位置情報によって特定される位置における高度を、その現在高度情報によって特定する。
【0019】
高度記憶処理部24は、高度特定処理部23が特定した高度を、その高度が特定された位置、つまり、現在位置情報によって特定される位置に対応付けて記憶することで、図4に示す高度地図Mを生成する。この高度地図Mには、高度特定処理部23が特定した高度、つまり、自車両Aの周辺に存在する他車両Bの現在高度が、その他車両Bの現在位置情報によって特定される位置に対応付けて記憶される。また、この高度地図Mには、自車両Aの現在高度情報によって特定される現在高度が、その自車両Aの現在位置情報によって特定される位置に対応付けて記憶される。このように生成された高度地図Mは、制御部12のRAMあるいは記憶部15に格納される。
【0020】
図4に示すように、この高度地図Mは、車両分布図Ma、横方向高度分布図Mb、および、縦方向高度分布図Mcを有する。車両分布図Maでは、自車両Aの現在位置が当該車両分布図Maのほぼ中心部に配置されるとともに、その自車両Aの現在位置を中心として当該自車両Aの周囲に存在する複数の他車両Bの現在位置が配置される。横方向高度分布図Mbでは、車両分布図Maに配置された自車両Aの現在高度および複数の他車両Bの現在高度が車両分布図Maの横方向に沿って各車両の現在位置に対応付けられて分布する。そして、これら各車両の現在高度を相互に補間しながら連結することで横方向高度分布図Mbに示すような地形図が得られる。縦方向高度分布図Mcでは、車両分布図Maに配置された自車両Aの現在高度および複数の他車両Bの現在高度が車両分布図Maの縦方向に沿って各車両の現在位置に対応付けられて分布する。そして、これら各車両の現在高度を相互に補間しながら連結することで縦方向高度分布図Mcに示すような地形図が得られる。
なお、この場合、車両分布図Maの左下部分に符号(i)で示す「山」が存在し、右上部分に符号(ii)で示す「丘」が存在し、自車両Aの現在位置よりも山(i)側、この場合、左側に位置して符号(iii)で示す「川」が存在し、丘(ii)と川(iii)との間に位置して符号(iv)で示す「池」が存在しているものとする。
【0021】
このようにして高度記憶処理部24によって生成される高度地図Mは、自車両Aの現在位置が随時変化すること伴い、また、他車両Bから当該他車両Bの現在位置情報および現在高度情報を随時受信することに伴い、常に最新の状態に書き換えられるようになっている。なお、この高度地図Mにおける横方向には、例えば、東西方向、経度方向、自車両Aの左右方向などを対応付けることができる。また、この高度地図Mにおける縦方向には、例えば、南北方向、緯度方向、自車両Aの前後方向などを対応付けることができる。
【0022】
案内方向特定処理部25は、上記のようにして高度記憶処理部24が記憶した各車両の位置情報および高度情報に基づいて生成した高度地図Mに基づいて、自車両Aを案内する方向を案内方向として特定する。この案内方向を特定するための具体的処理内容については、後述する動作説明にて説明する。
案内方向提示処理部26は、案内方向特定処理部25が特定した案内方向を表示出力部16を介してユーザに提示する。この場合、案内方向提示処理部26は、図3に示すように、特定した案内方向に対応する発光部16bを発光させることで、その案内方向をユーザに提示するようになっている。この場合、案内方向提示処理部26は、特定された案内方向が複数存在する場合には、後述するようにして決定した第1候補の案内方向に対応する発光部16bを、例えば安全であることを想起させ易い色である「緑色」や「青色」で発光させ、第2候補の案内方向に対応する発光部16bを、例えば注意を喚起させ易い色である「赤色」や「黄色」や「橙色」で発光させるようになっている。
【0023】
次に、上記した構成の運転支援システム10の動作、つまり、案内方向提示動作について、図5に示すフローチャートを参照して説明する。
各車両に搭載された運転支援装置11の制御部12は、自車両の現在位置情報および現在高度情報を送信する情報送信処理、および、自車両の周辺に存在する他車両から送信された当該他車両の現在位置情報および現在高度情報を受信する情報受信処理を常時実行している(ステップA1)。また、各車両の制御部12は、それぞれ高度地図生成処理を常時あるいは定期的に実行している(ステップA2)。この高度地図生成処理では、制御部12は、その時点における自車両の現在位置情報および現在高度情報と、その時点で自車両の周辺に存在する他車両から受信している当該他車両の現在位置情報および現在高度情報とに基づいて、自車両および他車両の現在位置および現在高度を配置した高度地図Mを生成する。そして、各車両の制御部12は、それぞれ高度地図Mを生成すると、図示しない緊急通報システムから緊急通報情報を受信したか否かを監視する(ステップA3)。
【0024】
そして、各車両の制御部12は、緊急通報情報を受信すると(ステップA3:YES)、案内方向特定処理を実行する(ステップA4)。この案内方向特定処理では、制御部12は、生成した高度地図Mに基づいて、自車両を案内する方向を案内方向として特定する。ここで、この案内方向特定処理の内容について、図6に示すフローチャートを参照して説明する。
【0025】
即ち、制御部12は、生成した高度地図Mのうち最も高度が高いポイント、この場合、山(i)の頂上を、図4に示すように誘導ポイントの候補である避難ポイント候補P(a)として抽出するとともに、当該避難ポイント候補P(a)の次に高度が高いポイント、この場合、丘(ii)の上を、図4に示すように誘導ポイントの候補である避難ポイント候補P(b)として抽出する(ステップB1)。この場合、自車両Aの現在位置から避難ポイント候補P(a)までの距離L(a)は、自車両Aの現在位置から避難ポイント候補P(b)までの距離L(b)よりも短くなっている。即ち、この場合、避難ポイント候補P(a)が自車両Aの現在位置から最も近い避難ポイントである。
【0026】
次に、制御部12は、高度変化分布図生成処理を実行する(ステップB2)。この高度変化分布図生成処理では、制御部12は、自車両の現在位置から避難ポイント候補P(a)に向かう避難方向D(a)における各地点の高度、および、自車両の現在位置から避難ポイント候補P(b)に向かう避難方向D(b)における各地点の高度を示す高度変化分布図FAを生成する。図7(a)は、この高度変化分布図FAの一例を示しており、この場合、自車両Aの現在位置を通過する境界線LCよりも左側が図4に示す避難方向D(a)に対応し、境界線LCよりも右側が図4に示す避難方向D(b)に対応する。
【0027】
次に、制御部12は、傾斜分布図生成処理を実行する(ステップB3)。この傾斜分布図生成処理では、制御部12は、生成した高度変化分布図FAの各地点における地形の傾斜度合いを示す傾斜値k、つまり、各地点における接線の傾きを算出し、その算出した傾斜値kをプロットした傾斜分布図FBを生成する。図7(b)は、この傾斜分布図FBの一例を示している。この図7(b)に示す傾斜分布図FBは、図7(a)に示す高度変化分布図FAに対応しており、自車両Aの現在位置を通過する境界線LCよりも左側が図4に示す避難方向D(a)に対応し、境界線LCよりも右側が図4に示す避難方向D(b)に対応する。
【0028】
次に、制御部12は、案内方向選択処理を実行する。この案内方向選択処理では、制御部12は、上記の傾斜分布図FBに基づいて各避難方向D(a),D(b)における高度の変化の態様、つまり、地形の傾斜度合いの変化の態様を把握し、把握した高度変化、換言すれば、傾斜の変化の態様に基づいて、より安全な避難方向、即ち、自車両Aを案内する方向としてより安全な案内方向を選択する。即ち、制御部12は、傾斜分布図FBのうち避難方向D(a)に対応する面積S(a)、つまり、避難方向D(a)の各地点における傾斜値kを積算した積算値であり図7(b)に示す面積S(a1),S(a2),S(a3)の和と、傾斜分布図FBのうち避難方向D(b)に対応する面積S(b)、つまり、避難方向D(b)の各地点における傾斜値kを積算した積算値であり図7(b)に示す面積S(b1),S(b2),S(b3)の和とを比較する。
【0029】
そして、制御部12は、その積算値がより大きくなる避難方向を選択する。つまり、制御部12は、自車両Aを避難ポイント候補P(a)に案内する避難方向D(a)、および、自車両Aを避難ポイント候補P(b)に案内する避難方向D(b)のうち、高度の低い地点がより少ない方向を選択するのである。この場合、避難方向D(a)に対応する面積S(a)よりも避難方向D(b)に対応する面積S(b)の方が大きいことから、制御部12は、避難方向D(b)を選択する。そして、制御部12は、その選択した避難方向D(b)、つまり、避難ポイント候補P(b)が存在する方向である自車両Aの右前方を、第1候補の案内方向として選択する。また、制御部12は、選択しなかった避難方向D(a)、つまり、避難ポイント候補P(a)が存在する方向である自車両Aの左後方を第2候補の案内方向として選択する。制御部12は、第1候補の案内方向および第2候補の案内方向を特定すると、この案内方向特定処理を終了する。
【0030】
制御部12は、案内方向特定処理を終了すると、案内情報提示処理を実行する(ステップA5)。この案内情報提示処理では、制御部12は、図3に示すように、上記の案内方向特定処理にて決定した第1候補の案内方向、この場合、自車両Aの右前方に対応する発光部16bを、例えば安全であることを想起させ易い色である「緑色」や「青色」で発光させ、第2候補の案内方向、この場合、自車両Aの左後方に対応する発光部16bを、例えば注意を喚起させ易い色である「赤色」や「黄色」や「橙色」で発光させる。
【0031】
以上に説明したように本実施形態によれば、運転支援装置11は、自車両の現在位置情報および現在高度情報と、他車両から受信した現在位置情報および現在高度情報とに基づいて自車両周辺の高度を示す高度地図Mを生成し、その高度地図Mに基づいて自車両の案内方向を特定して提示する。これにより、車両を案内する方向を運転支援装置11に地図データベースを備えることなく提示することができる。
【0032】
また、本実施形態によれば、運転支援装置11は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向のうち高度の低い地点が相対的に少ない方向を案内方向として特定する。また、本実施形態によれば、運転支援装置11は、避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向について、各方向に沿う地形の傾斜度合いを示す傾斜値kをそれぞれ積算し、その積算値が相対的に大きくなる方向を案内方向として特定する。
これにより、高度の低い地点が極力少ない避難方向が案内されるようになり、より安全な運転支援を行うことができる。
【0033】
また、本実施形態に係る複数の運転支援装置11から構成される運転支援システム10によれば、複数の運転支援装置11間で、各車両の現在位置を特定する現在位置情報および現在高度を特定する現在高度情報を送受信する。これにより、各車両の運転支援装置11において、それぞれ地図データベースを備えることなく案内方向を提示することが可能となる。
【0034】
本実施形態は、例えば災害発生時などに対応すべく、運転支援装置11が提示する案内方向として、高度地図Mに基づいて特定した「避難ポイント」に自車両を案内する方向を提示する実施形態を具体的に例示したものである。そして、本実施形態では、自車両を避難ポイントに導く具体的な避難経路を提示するのではなく、その避難ポイントが存在する「方向」を提示する構成とした。災害発生時においては、一刻も早く避難ポイントに避難する必要があり、従って、具体的な避難経路が提示されたとしても、その避難経路を確認する時間的な余裕はない。本実施形態によれば、具体的な避難経路ではなく、避難ポイントが存在する「方向」を提示するようにしたので、使用者は、まずはその方向に向かって避難を開始することで避難ポイントに近付くことができ、緊急を要する災害発生時において有効な運転支援を行うことができる。
【0035】
なお、本発明は、上述した一実施形態のみに限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば、以下のように変形または拡張することができる。
上述した案内方向提示動作は、操作入力部17が手動操作されたことをトリガとして実行するように構成してもよい。災害発生時では、緊急通報システム自体が適切に機能しなくなることも想定される。この構成によれば、手動操作によって案内方向を提示することが可能となり、緊急通報システムに依存することなく車両を案内することができる。
【0036】
車両を誘導する誘導ポイントは、「避難ポイント」に限られるものではなく、例えば、空きスペースが多い駐車場や低料金の駐車場、ユーザの好みに応じた娯楽施設、コンビニエンスストア、ガソリンスタンドなど、種々のポイントを誘導ポイントとして設定することができる。このような誘導ポイントを設定するための情報、例えば、駐車場の空きスペースや料金に関する情報、ユーザの好みに応じた施設や店舗などを特定するための情報などは、例えば情報通信モジュール14を介して外部の情報提供サーバから取得する構成としてもよいし、あるいは、ユーザが好みの施設や店舗などを予め運転支援装置11に登録しておく構成としてもよい。これにより、多少遠くても、空きスペースが多い駐車場、料金が安い駐車場、ユーザの好みに応じた施設や店舗など、ユーザにとってより好ましいポイントに自車両を誘導することができるようになる。
【符号の説明】
【0037】
図面中、10は運転支援システム、11は運転支援装置、21は情報送信処理部(情報送信手段)、22は情報受信処理部(情報受信手段)、23は高度特定処理部(高度特定手段)、24は高度記憶処理部(高度記憶手段)、25は案内方向特定処理部(案内方向特定手段)、26は案内方向提示処理部(案内方向提示手段)を示す。
【特許請求の範囲】
【請求項1】
他車両から送信された当該他車両の現在位置を特定する現在位置情報および当該他車両の現在高度を特定する現在高度情報を受信する情報受信手段と、
前記情報受信手段が受信した前記現在位置情報および前記現在高度情報に基づいて、当該現在位置情報によって特定される位置における高度を当該現在高度情報によって特定する高度特定手段と、
前記高度特定手段が特定した高度を前記現在位置情報によって特定される位置に対応付けて記憶する高度記憶手段と、
前記高度記憶手段に記憶された位置および高度に基づいて、自車両を案内する方向を案内方向として特定する案内方向特定手段と、
前記案内方向特定手段が特定した前記案内方向を提示する案内方向提示手段と、
を備えることを特徴とする運転支援装置。
【請求項2】
前記案内方向特定手段は、前記高度記憶手段に記憶された位置および高度に基づいて誘導ポイントを特定し、その誘導ポイントに自車両を案内する方向を、前記案内方向として特定することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
災害情報を取得する災害情報取得手段をさらに備え、
前記案内方向特定手段は、前記災害情報取得手段によって取得した前記災害情報と、前記高度記憶手段に記憶された位置および高度とに基づいて、避難すべき避難ポイントを前記誘導ポイントとして特定し、その避難ポイントに自車両を案内する方向を、前記案内方向として特定することを特徴とする請求項2に記載の運転支援装置。
【請求項4】
前記案内方向特定手段は、前記避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向のうち高度の低い地点が相対的に少ない方向を前記案内方向として特定することを特徴とする請求項3に記載の運転支援装置。
【請求項5】
前記案内方向特定手段は、前記避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向について、各方向に沿う地形の傾斜度合いを示す傾斜値をそれぞれ積算し、その積算値が相対的に大きくなる方向を前記案内方向として特定することを特徴とする請求項4に記載の運転支援装置。
【請求項6】
複数の車両に搭載された複数の運転支援装置から構成される運転支援システムであって、
前記運転支援装置は、それぞれ、
自車両の現在位置を特定する現在位置情報および自車両の現在高度を特定する現在高度情報を送信する情報送信手段と、
他車両から送信された当該他車両の現在位置を特定する現在位置情報および当該他車両の現在高度を特定する現在高度情報を受信する情報受信手段と、
前記情報受信手段が受信した他車両の前記現在位置情報および他車両の前記現在高度情報に基づいて、当該現在位置情報によって特定される位置における高度を当該現在高度情報によって特定する高度特定手段と、
前記高度特定手段が特定した高度を他車両の前記現在位置情報によって特定される位置に対応付けて記憶する高度記憶手段と、
前記高度記憶手段に記憶された位置および高度に基づいて、自車両を案内する方向を案内方向として特定する案内方向特定手段と、
前記案内方向特定手段が特定した前記案内方向を提示する案内方向提示手段と、
を備えることを特徴とする運転支援システム。
【請求項1】
他車両から送信された当該他車両の現在位置を特定する現在位置情報および当該他車両の現在高度を特定する現在高度情報を受信する情報受信手段と、
前記情報受信手段が受信した前記現在位置情報および前記現在高度情報に基づいて、当該現在位置情報によって特定される位置における高度を当該現在高度情報によって特定する高度特定手段と、
前記高度特定手段が特定した高度を前記現在位置情報によって特定される位置に対応付けて記憶する高度記憶手段と、
前記高度記憶手段に記憶された位置および高度に基づいて、自車両を案内する方向を案内方向として特定する案内方向特定手段と、
前記案内方向特定手段が特定した前記案内方向を提示する案内方向提示手段と、
を備えることを特徴とする運転支援装置。
【請求項2】
前記案内方向特定手段は、前記高度記憶手段に記憶された位置および高度に基づいて誘導ポイントを特定し、その誘導ポイントに自車両を案内する方向を、前記案内方向として特定することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
災害情報を取得する災害情報取得手段をさらに備え、
前記案内方向特定手段は、前記災害情報取得手段によって取得した前記災害情報と、前記高度記憶手段に記憶された位置および高度とに基づいて、避難すべき避難ポイントを前記誘導ポイントとして特定し、その避難ポイントに自車両を案内する方向を、前記案内方向として特定することを特徴とする請求項2に記載の運転支援装置。
【請求項4】
前記案内方向特定手段は、前記避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向のうち高度の低い地点が相対的に少ない方向を前記案内方向として特定することを特徴とする請求項3に記載の運転支援装置。
【請求項5】
前記案内方向特定手段は、前記避難ポイントが複数存在する場合には、自車両の現在位置から各避難ポイントに向かう複数の方向について、各方向に沿う地形の傾斜度合いを示す傾斜値をそれぞれ積算し、その積算値が相対的に大きくなる方向を前記案内方向として特定することを特徴とする請求項4に記載の運転支援装置。
【請求項6】
複数の車両に搭載された複数の運転支援装置から構成される運転支援システムであって、
前記運転支援装置は、それぞれ、
自車両の現在位置を特定する現在位置情報および自車両の現在高度を特定する現在高度情報を送信する情報送信手段と、
他車両から送信された当該他車両の現在位置を特定する現在位置情報および当該他車両の現在高度を特定する現在高度情報を受信する情報受信手段と、
前記情報受信手段が受信した他車両の前記現在位置情報および他車両の前記現在高度情報に基づいて、当該現在位置情報によって特定される位置における高度を当該現在高度情報によって特定する高度特定手段と、
前記高度特定手段が特定した高度を他車両の前記現在位置情報によって特定される位置に対応付けて記憶する高度記憶手段と、
前記高度記憶手段に記憶された位置および高度に基づいて、自車両を案内する方向を案内方向として特定する案内方向特定手段と、
前記案内方向特定手段が特定した前記案内方向を提示する案内方向提示手段と、
を備えることを特徴とする運転支援システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−72690(P2013−72690A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210768(P2011−210768)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]