
運転支援装置、運転支援方法および運転支援プログラム
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車外からの交通情報を利用して安全運転を支援するための運転支援装置に関する。
【背景技術】
【0002】
運転者にとって視認困難な位置にある自動車、二輪車、歩行者を、各種感知機により検出し、検出された情報を、車載器に提供し運転者に注意を促すような安全運転支援システムの研究が進められている。安全運転支援システムの一つに、赤外線を利用した双方向通信が可能な光ビーコンにより交通情報を車載器に提供するDSSS(driving safety support systems)がある。DSSSは、渋滞情報提供サービスであるVICS(Vehicle Information Communication System)で使用される光ビーコンを利用するため、車載器のビーコンユニットをそのまま活用することができ、また、通信距離が3.5m程度と短いため、車線ごとの個別の情報を提供することができる、という利点がある。
【0003】
このような運転支援に関して、例えば特許文献1は、車載カメラで停止線を認識できない場合でも、一時停止位置に関する車外情報を無線で取得し、車外情報に基づき運転者に一時停止させるための情報を出力するものである。また、特許文献2は、車両の位置から交差点手前の停止位置の限度位置までの距離を検出し、その距離と走行状態に基づき限度位置での走行状態を予測することで現在の走行状態が適当か否かを判定し、判定結果を運転者に警報を与えるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−53686号公報
【特許文献2】特開2008−262481号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
DSSSのような運転支援システムを利用した車載器は、一時停止に関する情報を光ビーコンなどから受信した後、自車が前方の一時停止線で停止することができないと判断した場合に、運転者に対し減速等の警告を与える。しかし、次のように自車前方に視界不良が存在する状況下では、運転者は、一時停止線を明瞭に認識することができず、一時停止線の前で停止することができないおそれがある。
1)豪雨や暴風等の天候不良により自車前方の一時停止の標記を視認することができない場合;
2)降雪などの路面上の障害物により、路面上の一時停止ラインを視認することができない場合;
3)自車前方に、車高の高い大型車等が存在するなどして、自車前方の一時停止の標識及び一時停止ラインを視認することができない場合などである。
【0006】
さらに一時停止に関する情報以外にも、信号機に関する情報を受信したときにも前方の視界が不良であると、受信したときの信号機の表示状況と実際に信号機を視認したときの表示状況が相違してしまうことがあり、運転者にとって混乱し易い。さらに、右折専用レーンで前の車に続いて進むときに前方の信号が見えないと、前の車が、右折専用の青矢印の信号で進んでいるのか、通常の青信号で進んでいるのか運転者にはわからない。前の車が青信号で右折している場合には、対向車が直進してくる恐れがあり、前車の動きに続いて進むことは大変危険である。
【0007】
本発明は、上記従来の課題を解決し、自車前方に存在する走行規制に対し注意を喚起する運転支援装置、運転支援方法および運転支援プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る運転支援装置は、車外からの交通情報を利用して運転支援を行うものであって、自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信する受信手段と、自車前方を撮像し、その撮像データを提供する撮像手段と、前記撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定する判定手段と、前記判定手段により自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示する提示手段とを有する。
【0009】
好ましくは前記判定手段は、自車前方に撮像された物体の輪郭と背景とのコントラスト比が閾値未満のとき、視界が不良であると判定する。好ましくは前記判定手段は、自車前方の視界を遮る障害物が存在するとき視界が不良であると判定する。好ましくは前記判定手段は、自車前方の標識または信号機を画像認識することができないとき、視界が不良であると判定する。好ましくは前記判定手段は、自車前方の路面に表示された文字または図形を画像認識することができないとき、視界が不良であると判定する。好ましくは運転支援装置はさらに、前記受信した交通情報と自車の走行状態に基づき自車が前記走行規制を遵守することができるか否かを判定する遵守判定手段を含み、前記提示手段は、前記遵守判定手段により自車が走行規制を遵守できると判定された場合であっても前記判定手段により視界が不良であると判定された場合には、前記警報を提示する。好ましくは前記交通情報は、自車が走行している道路前方に存在する一時停止に関する情報を含み、前記提示手段は、一時停止が存在する警報を音声または画像にて提示する。好ましくは前記交通情報は、自車が走行している道路前方に存在する信号機に関する情報を含み、前記提示手段は、信号機の灯色状態を示す警報を画像により提示する。好ましくは前記警報は、灯色の残存時間を含む。好ましくは前記灯色状態は、信号機が赤表示でありかつ右折可能な青矢印の情報を含む。好ましくは前記提示手段は、自車が右折レーンを走行しているとき、信号機が青色の灯色である警報を提示する。
【0010】
本発明に係る運転支援方法は、車外からの交通情報を利用して運転支援を行うものであって、自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、前記自車前方の視界が不良であると判定されたとき、前記受信した交通情報に基づき警報を提示するステップとを有する。
【0011】
本発明に係る運転支援プログラムは、車外からの交通情報を利用して運転支援を行う運転支援装置が実行するものであって、自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、前記自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示するステップとを有する。
【発明の効果】
【0012】
本発明によれば、自車前方の視界が良くないと判定されたときに警報を提示するようにしたので、運転者は、自車前方に存在する走行規制を対し注意を喚起され、安全運転を促される。
【図面の簡単な説明】
【0013】
【図1】DSSSを利用した追突事故防止/信号見落とし防止の例を説明する図である。
【図2】DSSSを利用した一時停止規制見落とし防止/出会い頭衝突事故防止の例を説明する図である。
【図3】本発明の実施例に係る運転支援装置の構成を示すブロック図である。
【図4】撮像カメラの搭載例を示す平面図である。
【図5】制御部の機能的な構成を示す図ブロック図である。
【図6】本実施例の運転支援装置の動作を説明するフローチャートである。
【図7】視界の良否判定の例を示すフローチャートである。
【図8】一時停止に関する情報を受信したときの例を示す図である。
【図9】一時停止に関する情報を警告するときの表示例である。
【図10】信号機に関する情報を受信したときの例を示す図である。
【図11】信号機に関する情報を受信したときの例を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を参照して詳細に説明する。本実施の形態に係る運転支援装置は、DSSSを利用する。DSSSは、信号情報サービス、規制情報サービス、障害物検知情報利用サービス、および路面情報利用サービスを提供する安全運転支援システムの一つである。DSSSによるサービスを実現するために、配信装置から車載器には、以下のような交通情報が提供される。
「システム情報」:年月日、サービス路線状態等から構成される。
「道路線形情報」:情報提供地点から対象、交差点、区間までの道路構造を表す。
「信号情報」:信号の予定秒数を表す。
「信号事象表現情報」:信号情報に対応した停止線位置を表す。
「規制情報」:規制内容、対象期間を表す。
「障害物検知情報」:障害物検知情報に対応した範囲を表す。
「障害物検知事象表現情報」:障害物のセンサー検知状態を表す。
「路面情報」:路面状態を表す。
「路面事象表現情報」:路面情報に対応した範囲を表す。
【0015】
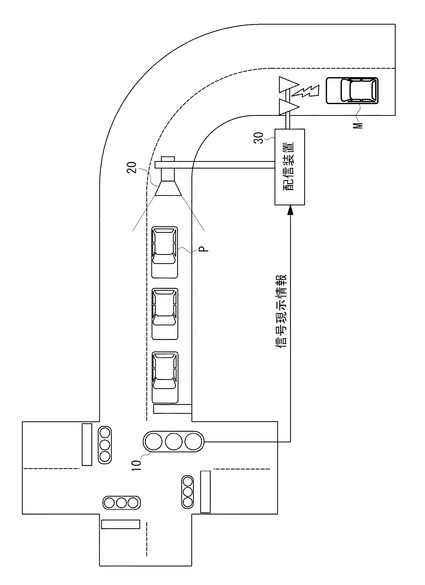
図1は、DSSSを利用した追突事故防止/信号見落とし防止を説明する図である。図の例では、信号機10が設置されている交差点に向けて自車Mが走行している例を示している。信号機10は、現在の表示状況に関する信号現示情報を配信装置30へ提供する。路側に設置された撮像カメラ20は、交差点を撮像し、交差点に渋滞が発生したとき渋滞末尾の車両Pの位置を含む渋滞末尾情報を配信装置30へ提供する。
【0016】
配信装置30は、そこを通過する自車Mに対し信号現示情報や渋滞末尾情報を光ビーコンを介して送信する。また、配信装置30は、交差点までの道路形状に関する道路線形情報も配信することができる。自車Mの車載器は、受信した交通情報に解読し、渋滞末尾の車両Pに衝突すると判断した場合には、減速を警告したり、赤信号であるにもかかわらず交差点の停止線で止まれない判断した場合には、減速を警告する。典型的に、運転者が自車Mを減速行動していれば、警告を発しない。
【0017】
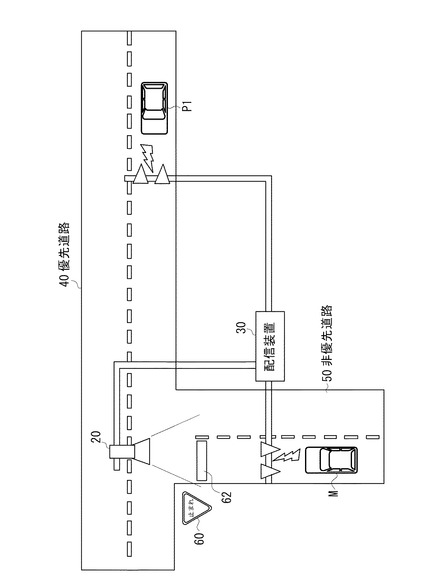
図2は、DSSSを利用した一時停止規制見落とし防止/出会い頭衝突防止を説明する図である。図の例では、優先道路40と非優先道路50が交差し、非優先道路50には、一時停止の標識60と一時停止線62が設けられ、他車P1が優先道路40を走行し、自車Mが非優先道路50を走行し、両車両が交差点に接近している状態を示している。
【0018】
配信装置30は、非優先道路50を走行している自車Mに対して、一時停止線に関する情報を配信する。自車Mの車載器は、受信した情報から前方に一時停止線が存在することを解読し、自車Mの走行状態等から一時停止線で止まれないと判断した場合には、減速を警告する。典型的に運転者が減速行動中であれば、警告をしない。
【0019】
また、路側の撮像カメラ20は、交差点近傍を撮像し、非優先道路50を走行している自車Mに関する車両情報を配信装置30に提供する。配信装置30は、優先道路40を走行している他車P1に、自車Mに関する車両情報を提供し、他車P1の車載器は、その情報を解読し非優先道路50の自車Mと遭遇すると判断した場合には、減速を警告する。典型的に運転者が減速行動中であれば、警告をしない。
【実施例】
【0020】
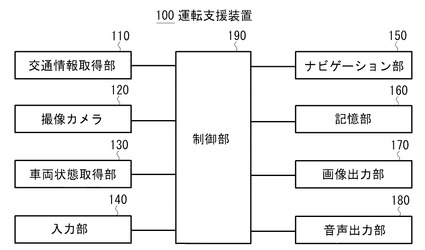
以下、本発明の実施例に係る、DSSSを利用した運転支援装置について説明する。図3は、本実施例に係る運転支援装置の構成を示すブロック図である。本実施例に係る運転支援装置100は、外部からの交通情報を取得する交通情報取得部110と、少なくとも自車の前方を撮像する撮像カメラ120と、自車の走行状態に関する情報を取得する車両状態取得部130と、
ユーザーからの入力を受け取る入力部140と、自車位置周辺の道路地図等を案内するナビゲーション部150と、種々の情報を格納する記憶部160と、ディスプレイに画像情報を表示させる画像出力部170と、スピーカーから音声情報を出力させる音声出力部180と、各部を制御する制御部190とを含んで構成される。
【0021】
交通情報取得部110は、DSSSから配信される交通情報を光ビーコンを介して受信する。交通情報取得部110は、DSSSに加えて、VICSやその他の交通情報を無線により取得する機能を備えていてもよい。
【0022】
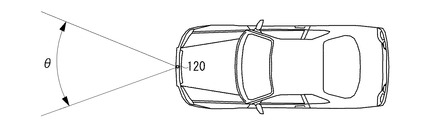
撮像カメラ120は、例えばCCDやCMOSイメージセンサを用いて構成される。撮像カメラ120は、図4に示すように、自車前部の車幅方向の中央部に取り付けられ、自車前方の路面状態、標識、看板、信号機、ビルディング、前方車両等を撮像する。撮像カメラ120の水平方向の画角θは、使用されるレンズによって適宜選択される。撮像カメラ120によって撮像された撮像データは、制御部190へ提供され、そこで画像処理される。
【0023】
車両状態取得部130は、自車の走行状態に関する情報を取得する。走行状態に関する情報として、GPS受信機などによる自車位置情報、自立航法センサーによる走行情報、車速センサーからの速度情報、ブレーキのオン、オフ情報、ウインカー情報などである。入力部140は、ユーザーからの入力を、マウス、キーボード、音声入力、タッチパネル等を介して受け取り、これを制御部190へ伝える。
【0024】
ナビゲーション部150は、車両状態取得部130で取得された自車位置情報に基づき自車位置を道路地図上にマッピングさせて地図案内をしたり、目的地までの誘導経路を案内する。記憶部160は、ナビゲーション部150に必要とされる道路地図情報を記憶したり、制御部190が実行するプログラムデータなどを記憶する。
【0025】
画像出力部170は、ナビゲーション部150が実行されたときにディスプレイ上に道路地図を表示させたり、交通情報を受信したときに警報などを表示させる。音声出力部180は、ナビゲーション部150が実行されたときに音声案内をスピーカーから出力させたり、交通情報を受信したときに警報などを出力させる。
【0026】
制御部190は、例えば、マイクロプロセッサ、マイクロコンピュータ、画像処理プロセッサなどを用いて構成され、ROMやRAMに格納されたプログラムを実行して運転支援動作を行うことができる。但し、制御部190は、ソフトウエア、ハードウエア、あるいはソフトウエアとハードウエアの組合せによって実現されるようにしてもよい。
【0027】
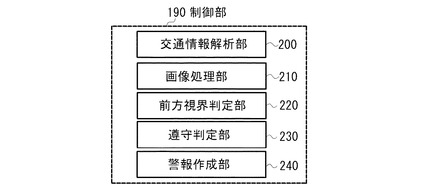
次に、本実施例の制御部190の機能ブロックを図5に示す。同図に示すように、制御部190は、交通情報取得部110で取得された交通情報を解析する交通情報解析部200を有する。DSSSから配信される交通情報は、自車が走行している道路の前方に存在する一時停止規制、信号機の現示表示、渋滞などの走行規制に関する情報を含んでいる。交通情報解析部200は、受信した交通情報から、規制の種別、規制対象までの位置、規制の内容などを解析する。
【0028】
画像処理部210は、撮像カメラ120によって撮像された自車前方の撮像データを受け取り、撮像データの歪み補正処理、撮像データに撮像された物体のエッジ(輪郭)検出処理などの画像処理を行う。このエッジ処理によって、自車前方にある、道路、標識、看板、信号機、ビルディング、前方車両などの輪郭情報が抽出される。
【0029】
前方視界判定部220は、画像処理部210で処理された画像データから、自車前方の視界の良否を判定する。視界の良否の判定は、例えば、抽出された物体のエッジと背景とのコントラスト比または明暗比を用い、それらの比が閾値以上であれば、視界が良好であると判定し、閾値未満であれば、視界が不良であると判定する。この際、撮像されたすべての物体または一定数の物体について上記の判定を行い、過半数以上の物体のコントラスト比または明暗比が閾値以上であれば、視界が良好であると判定するようにしてもよい。
【0030】
さらに前方視界判定部220は、撮像された特定の物体が画像認識することができるか否かを判定基準に用いることもできる。この場合、画像認識の対象となる物体の輪郭を識別するための参照データを記憶部160に格納しておき、参照データと画像処理によって抽出された物体のエッジ情報とのマッチングを行う。好ましくは、走行規制に関連する物体、例えば、一時停止を表す標識、信号機、路面上に記載された「止まれ」の文字や停止線などの画像認識が行われる。もし、マッチングしたならば、視界は良好と判定し、マッチングしなければ視界が不良と判定する。
【0031】
このような視界の判定を行うことにより、例えば、豪雨や暴風等の天候不良により自車前方の標識や信号機などを明瞭に認識することができないとき、降雪などの路面上の障害物により、路面上の一時停止ラインを明瞭に認識することができないとき、視界が不良と判定される。
【0032】
さらに前方視界判定部220は、自車前方に一定以上の高さを有する物体が撮像されたとき、自車前方の視界が遮られるため、視界が不良であると判定する。例えば、自車前方にバスやトラックなどの大型車が存在しているとき、自車前方の標識や信号機を見ることができなくなるので、このような場合、視界が不良であると判定される。好ましくは、画像処理部210および前方視界判定部220は、交通情報解析部200によって交通情報が解析されたことに応答して動作することができる。
【0033】
遵守判定部230は、交通情報から自車前方に走行規制があることが解析されたとき、自車の走行状態や走行規制までの距離などから自車が走行規制を遵守することができるか否かを判定する。例えば、一時停止線を越えずに停止することができないとき、赤信号の残り時間内に交差点に到達するとき、規制を遵守することができないことになる。警報作成部240は、前方視界判定部220により自車前方の視界が不良と判定されたとき、または遵守判定部230により走行規制を遵守することができないと判定されたとき、運転者に注意を喚起するための警報を作成する。
【0034】
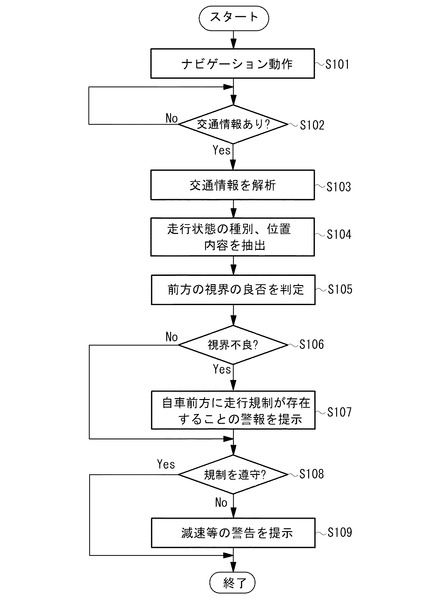
次に、本実施例の運転支援装置の動作を図6のフローチャートを参照して説明する。自車の走行開始に伴いナビゲーション部150が動作される(ステップS101)。ナビゲーション部150は、GPS受信機や自立航法センサーから自車位置情報を受け取り、画像出力部170は、ディスプレイに自車位置周辺の道路地図や合成された自車位置マークを表示する。また、目的地が設定されていれば、目的地までの誘導経路も合成して表示する。
【0035】
交通情報取得部110は、DSSSからの交通情報が受信されたか否かを監視し(ステップS102)、交通情報が受信されると、それが交通情報解析部200によって解析される(ステップS103)。この解析により、自車前方に存在する走行規制の種別、位置および内容が抽出される(ステップS104)。
【0036】
次に、前方視界判定部220は、自車前方の視界の良否を判定する(ステップS105)。前方視界判定部220によって視界が不良と判定された場合には(ステップS106)、警報作成部240は、交通情報解析部200によって抽出された走行規制の種別、位置および内容に基づき自車前方に走行規制が存在することを知らせるための警報を作成し、この警報が提示される(ステップS107)。提示方法として、画像出力部170は、ディスプレイ上に表示されている道路地図上に警報画面を合成して表示したり、音声出力部180は、音声によりその旨の警報を報知することができる。例えば、「これより前方100メートル先に一時停止が存在します」などの警報を提示する。警報の提示は、一定時間、または断続的に行われても良い。
【0037】
次に、遵守判定部230は、自車の走行状態および走行規制までの距離などから、自車が走行規制を遵守できるか否かを判定する(ステップS108)。遵守することができないと判定した場合には、警報作成部240は、減速等を促す警告を作成し、これが提示される(ステップS109)。提示の方法は、ディスプレイに警報を表示したり、あるいは音声にて警報を報知する。他方、規制を遵守することができると判定された場合には、警告の提示は行われない。
【0038】
このように自車前方の視界が不良と判定された場合には、走行規制を遵守できるか否かを問わず、必ず、自車前方に存在する走行規制に関する警報が提示されるため、たとえ運転者が前方の走行規制を明瞭に認識することができないような状況であっても、注意が喚起され安全運転を強いられる。
【0039】
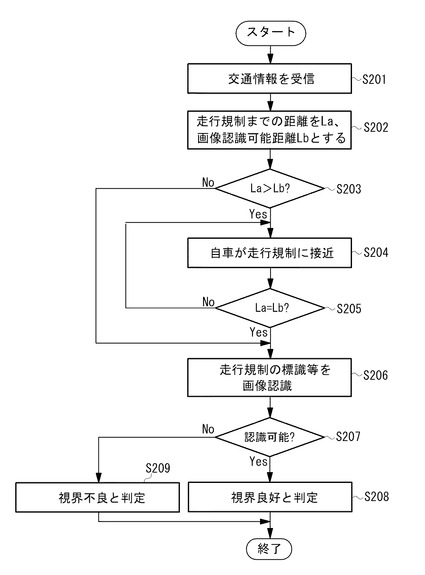
次に、交通情報から抽出された走行規制に関連する物体を画像認識することで視界の良否判定を行う好ましい例を図7のフローチャートを参照して説明する。DSSSによる交通情報が受信されると(ステップS201)、交通情報解析部200によって自車前方に存在する走行規制(例えば、一時停止や信号機など)までの距離が抽出される。この距離をLaとする。他方、撮像データを利用した画像認識は、撮像カメラ120によって目的物を十分に撮像できる位置に到達したときに行うことが望ましい。つまり、目的物までの距離が遠すぎると、それが原因で視界不良となるおそれがある。ここでは、撮像データから画像認識を十分に行うことができる距離をLbとする(ステップS202)。
【0040】
前方視界判定部220は、La>Lbのとき(ステップS203)、画像認識をするには遠すぎると判定し未だ画像認識による視界判定を行わず、自車がさらに走行規制に接近するのを待つ(ステップS204)。La=Lbに到達したとき(ステップS205)、前方視界判定部220は、距離Lbで撮像された撮像データに基づき走行規制の標識や信号機などの画像認識を行う(ステップS206)。前方視界判定部220は、目標物を画像認識することができたとき(ステップS207)、視界が良好であると判定し(ステップS208)、認識することができないとき、視界が不良であると判定する(ステップS209)。
【0041】
なお、上記の視界の判定は、走行規制の位置近傍にある標識等の目標物を画像認識する場合に用いられるものであり、それ以外の目標物について画像認識をする場合には、図7のフローによらず、交通情報を受信した直後の撮像データを画像認識し視界の良否判定をすることができる。
【0042】
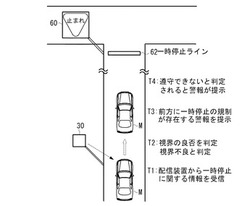
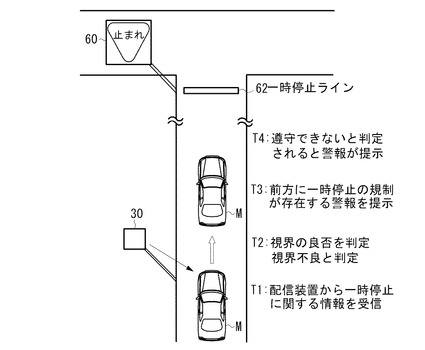
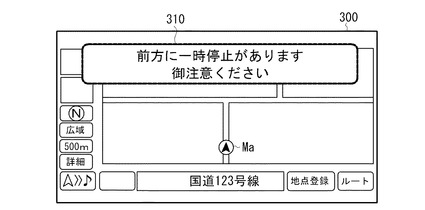
次に、具体的な例を参照して説明する。図8は、交通情報として一時停止に関する情報を受信した例を示している。時間T1において、自車Mは、配信装置30から交通情報を受け取り、その情報を解析する。時間T2において、交通情報を受け取ったことに応答して視界の良否を判定し、その結果、視界が不良であると判定したと仮定する。時間T3において、視界が不良であると判定されたことに応答して、前方に一時停止の規制が存在することを知らせる警報を提示する。図9は、ディスプレイの道路画面300に、警報310が表示された例を示している。そして、時間T4において、一時停止線62で自車が停止することができないと判定されると、減速等を促す警報が提示される。
【0043】
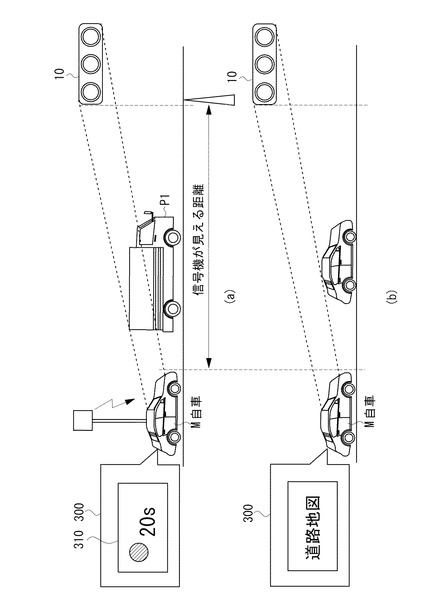
図10は、交通情報として信号機に関する情報を受信した例を示している。自車Mは、配信装置30から前方に存在する信号機10に関する情報を受信する。前方視界判定部220は、自車から信号機を見ることができる距離に到達したとき、当該距離に基づき信号機10の高さまたは信号機10が見える方向を算出し、自車Mと信号機10が見える方向との間に車両が撮像されているか否かを判定する。図10(a)に示すように、信号機10を視認するのに障害となる車両P1が存在するとき、視界が不良と判定され、自車Mのディスプレイ300には、信号機10の灯色情報と残秒(図の例では、赤信号で残り20秒)の警報310が表示される。他方、図10(b)に示すように、障害となるような車両が存在しないとき、視界は良好と判定され、警報はディスプレイに表示されないが、運転者は、信号機10を見ることができるので、通常通り、前方確認の義務を履行する。
【0044】
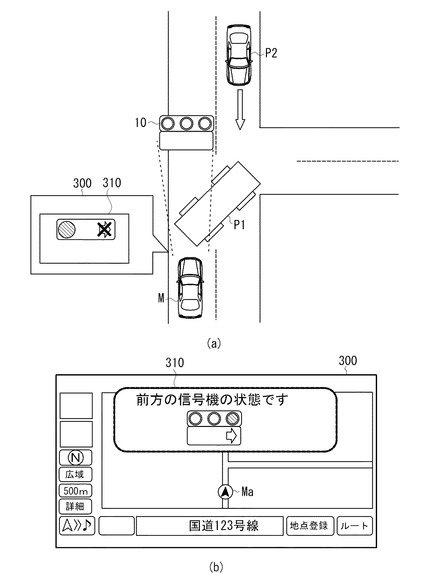
図11は、交通情報として信号機に関する情報を受信したときの他の例を示している。
自車Mが信号機に関する情報を受信し、自車前方に信号機を見るのに障害となる車両P1が存在するとき、視界が不良と判定される。そして、自車Mのディスプレイ300には、信号機の灯色情報と右折可能な青矢が点灯しているか否かの警報310が表示される。図(a)の例では、青信号の灯色情報が示されている。通常、青信号は警告の対象にならないが、信号機の灯色表示パターンが青矢を含む場合で、かつ自車が右折レーンを通過する時、警告の対象とする。なお、信号機が赤信号で青矢のときにも、図(b)に示すような警報310がディスプレイ300の画面上に表示される。
【0045】
前方車両P1は、信号機10の灯色および対向車P2を確認して右折するが、自車Mの運転者は、青矢になったと思い込んで前方車両P1に続いて右折することなく、対向車P2を確認してから右折するように注意を喚起される。
【0046】
上記実施例では、自車が走行する前方に存在する一時停止や信号機などの走行規制に関する情報を受信し、かつ視界が不良と判定されたときに、警報を提示するようにしたが、例えば、自車と走行規制との間に脇道が存在し、その脇道を走行するような誘導経路が引かれている場合には、自車は走行規制を通らないので、警告を提示しないようにしてもよい。
【0047】
以上、本発明の好ましい実施の形態について詳述したが、本発明は、特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。上記実施例は、車載表示装置としての例を示したが、車載表示装置は、ナビゲーション装置、オーディオ・ビデオ装置と一体化されたシステム内に含まれるものであってもよい。
【符号の説明】
【0048】
10:信号機 20:路側機側の撮像カメラ
30:配信装置 40:優先道路
50:非優先道路 60:一時低の標識
62:一時停止のライン 100:運転支援装置
110:交通情報取得部 120:撮像カメラ
130:車両状態取得部 140:入力部
150:ナビゲーション部 160:記憶部
170:画像出力部 180:音声出力部
190:制御部 200:交通情報解析部
210:画像処理部 220:前方視界判定部
230:遵守判定部 240:警報作成部
300:ディスプレイ画面 310:警報
M:自車
P:渋滞末尾車両
P1、P2:車両
【技術分野】
【0001】
本発明は、車外からの交通情報を利用して安全運転を支援するための運転支援装置に関する。
【背景技術】
【0002】
運転者にとって視認困難な位置にある自動車、二輪車、歩行者を、各種感知機により検出し、検出された情報を、車載器に提供し運転者に注意を促すような安全運転支援システムの研究が進められている。安全運転支援システムの一つに、赤外線を利用した双方向通信が可能な光ビーコンにより交通情報を車載器に提供するDSSS(driving safety support systems)がある。DSSSは、渋滞情報提供サービスであるVICS(Vehicle Information Communication System)で使用される光ビーコンを利用するため、車載器のビーコンユニットをそのまま活用することができ、また、通信距離が3.5m程度と短いため、車線ごとの個別の情報を提供することができる、という利点がある。
【0003】
このような運転支援に関して、例えば特許文献1は、車載カメラで停止線を認識できない場合でも、一時停止位置に関する車外情報を無線で取得し、車外情報に基づき運転者に一時停止させるための情報を出力するものである。また、特許文献2は、車両の位置から交差点手前の停止位置の限度位置までの距離を検出し、その距離と走行状態に基づき限度位置での走行状態を予測することで現在の走行状態が適当か否かを判定し、判定結果を運転者に警報を与えるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−53686号公報
【特許文献2】特開2008−262481号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
DSSSのような運転支援システムを利用した車載器は、一時停止に関する情報を光ビーコンなどから受信した後、自車が前方の一時停止線で停止することができないと判断した場合に、運転者に対し減速等の警告を与える。しかし、次のように自車前方に視界不良が存在する状況下では、運転者は、一時停止線を明瞭に認識することができず、一時停止線の前で停止することができないおそれがある。
1)豪雨や暴風等の天候不良により自車前方の一時停止の標記を視認することができない場合;
2)降雪などの路面上の障害物により、路面上の一時停止ラインを視認することができない場合;
3)自車前方に、車高の高い大型車等が存在するなどして、自車前方の一時停止の標識及び一時停止ラインを視認することができない場合などである。
【0006】
さらに一時停止に関する情報以外にも、信号機に関する情報を受信したときにも前方の視界が不良であると、受信したときの信号機の表示状況と実際に信号機を視認したときの表示状況が相違してしまうことがあり、運転者にとって混乱し易い。さらに、右折専用レーンで前の車に続いて進むときに前方の信号が見えないと、前の車が、右折専用の青矢印の信号で進んでいるのか、通常の青信号で進んでいるのか運転者にはわからない。前の車が青信号で右折している場合には、対向車が直進してくる恐れがあり、前車の動きに続いて進むことは大変危険である。
【0007】
本発明は、上記従来の課題を解決し、自車前方に存在する走行規制に対し注意を喚起する運転支援装置、運転支援方法および運転支援プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る運転支援装置は、車外からの交通情報を利用して運転支援を行うものであって、自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信する受信手段と、自車前方を撮像し、その撮像データを提供する撮像手段と、前記撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定する判定手段と、前記判定手段により自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示する提示手段とを有する。
【0009】
好ましくは前記判定手段は、自車前方に撮像された物体の輪郭と背景とのコントラスト比が閾値未満のとき、視界が不良であると判定する。好ましくは前記判定手段は、自車前方の視界を遮る障害物が存在するとき視界が不良であると判定する。好ましくは前記判定手段は、自車前方の標識または信号機を画像認識することができないとき、視界が不良であると判定する。好ましくは前記判定手段は、自車前方の路面に表示された文字または図形を画像認識することができないとき、視界が不良であると判定する。好ましくは運転支援装置はさらに、前記受信した交通情報と自車の走行状態に基づき自車が前記走行規制を遵守することができるか否かを判定する遵守判定手段を含み、前記提示手段は、前記遵守判定手段により自車が走行規制を遵守できると判定された場合であっても前記判定手段により視界が不良であると判定された場合には、前記警報を提示する。好ましくは前記交通情報は、自車が走行している道路前方に存在する一時停止に関する情報を含み、前記提示手段は、一時停止が存在する警報を音声または画像にて提示する。好ましくは前記交通情報は、自車が走行している道路前方に存在する信号機に関する情報を含み、前記提示手段は、信号機の灯色状態を示す警報を画像により提示する。好ましくは前記警報は、灯色の残存時間を含む。好ましくは前記灯色状態は、信号機が赤表示でありかつ右折可能な青矢印の情報を含む。好ましくは前記提示手段は、自車が右折レーンを走行しているとき、信号機が青色の灯色である警報を提示する。
【0010】
本発明に係る運転支援方法は、車外からの交通情報を利用して運転支援を行うものであって、自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、前記自車前方の視界が不良であると判定されたとき、前記受信した交通情報に基づき警報を提示するステップとを有する。
【0011】
本発明に係る運転支援プログラムは、車外からの交通情報を利用して運転支援を行う運転支援装置が実行するものであって、自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、前記自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示するステップとを有する。
【発明の効果】
【0012】
本発明によれば、自車前方の視界が良くないと判定されたときに警報を提示するようにしたので、運転者は、自車前方に存在する走行規制を対し注意を喚起され、安全運転を促される。
【図面の簡単な説明】
【0013】
【図1】DSSSを利用した追突事故防止/信号見落とし防止の例を説明する図である。
【図2】DSSSを利用した一時停止規制見落とし防止/出会い頭衝突事故防止の例を説明する図である。
【図3】本発明の実施例に係る運転支援装置の構成を示すブロック図である。
【図4】撮像カメラの搭載例を示す平面図である。
【図5】制御部の機能的な構成を示す図ブロック図である。
【図6】本実施例の運転支援装置の動作を説明するフローチャートである。
【図7】視界の良否判定の例を示すフローチャートである。
【図8】一時停止に関する情報を受信したときの例を示す図である。
【図9】一時停止に関する情報を警告するときの表示例である。
【図10】信号機に関する情報を受信したときの例を示す図である。
【図11】信号機に関する情報を受信したときの例を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を参照して詳細に説明する。本実施の形態に係る運転支援装置は、DSSSを利用する。DSSSは、信号情報サービス、規制情報サービス、障害物検知情報利用サービス、および路面情報利用サービスを提供する安全運転支援システムの一つである。DSSSによるサービスを実現するために、配信装置から車載器には、以下のような交通情報が提供される。
「システム情報」:年月日、サービス路線状態等から構成される。
「道路線形情報」:情報提供地点から対象、交差点、区間までの道路構造を表す。
「信号情報」:信号の予定秒数を表す。
「信号事象表現情報」:信号情報に対応した停止線位置を表す。
「規制情報」:規制内容、対象期間を表す。
「障害物検知情報」:障害物検知情報に対応した範囲を表す。
「障害物検知事象表現情報」:障害物のセンサー検知状態を表す。
「路面情報」:路面状態を表す。
「路面事象表現情報」:路面情報に対応した範囲を表す。
【0015】
図1は、DSSSを利用した追突事故防止/信号見落とし防止を説明する図である。図の例では、信号機10が設置されている交差点に向けて自車Mが走行している例を示している。信号機10は、現在の表示状況に関する信号現示情報を配信装置30へ提供する。路側に設置された撮像カメラ20は、交差点を撮像し、交差点に渋滞が発生したとき渋滞末尾の車両Pの位置を含む渋滞末尾情報を配信装置30へ提供する。
【0016】
配信装置30は、そこを通過する自車Mに対し信号現示情報や渋滞末尾情報を光ビーコンを介して送信する。また、配信装置30は、交差点までの道路形状に関する道路線形情報も配信することができる。自車Mの車載器は、受信した交通情報に解読し、渋滞末尾の車両Pに衝突すると判断した場合には、減速を警告したり、赤信号であるにもかかわらず交差点の停止線で止まれない判断した場合には、減速を警告する。典型的に、運転者が自車Mを減速行動していれば、警告を発しない。
【0017】
図2は、DSSSを利用した一時停止規制見落とし防止/出会い頭衝突防止を説明する図である。図の例では、優先道路40と非優先道路50が交差し、非優先道路50には、一時停止の標識60と一時停止線62が設けられ、他車P1が優先道路40を走行し、自車Mが非優先道路50を走行し、両車両が交差点に接近している状態を示している。
【0018】
配信装置30は、非優先道路50を走行している自車Mに対して、一時停止線に関する情報を配信する。自車Mの車載器は、受信した情報から前方に一時停止線が存在することを解読し、自車Mの走行状態等から一時停止線で止まれないと判断した場合には、減速を警告する。典型的に運転者が減速行動中であれば、警告をしない。
【0019】
また、路側の撮像カメラ20は、交差点近傍を撮像し、非優先道路50を走行している自車Mに関する車両情報を配信装置30に提供する。配信装置30は、優先道路40を走行している他車P1に、自車Mに関する車両情報を提供し、他車P1の車載器は、その情報を解読し非優先道路50の自車Mと遭遇すると判断した場合には、減速を警告する。典型的に運転者が減速行動中であれば、警告をしない。
【実施例】
【0020】
以下、本発明の実施例に係る、DSSSを利用した運転支援装置について説明する。図3は、本実施例に係る運転支援装置の構成を示すブロック図である。本実施例に係る運転支援装置100は、外部からの交通情報を取得する交通情報取得部110と、少なくとも自車の前方を撮像する撮像カメラ120と、自車の走行状態に関する情報を取得する車両状態取得部130と、
ユーザーからの入力を受け取る入力部140と、自車位置周辺の道路地図等を案内するナビゲーション部150と、種々の情報を格納する記憶部160と、ディスプレイに画像情報を表示させる画像出力部170と、スピーカーから音声情報を出力させる音声出力部180と、各部を制御する制御部190とを含んで構成される。
【0021】
交通情報取得部110は、DSSSから配信される交通情報を光ビーコンを介して受信する。交通情報取得部110は、DSSSに加えて、VICSやその他の交通情報を無線により取得する機能を備えていてもよい。
【0022】
撮像カメラ120は、例えばCCDやCMOSイメージセンサを用いて構成される。撮像カメラ120は、図4に示すように、自車前部の車幅方向の中央部に取り付けられ、自車前方の路面状態、標識、看板、信号機、ビルディング、前方車両等を撮像する。撮像カメラ120の水平方向の画角θは、使用されるレンズによって適宜選択される。撮像カメラ120によって撮像された撮像データは、制御部190へ提供され、そこで画像処理される。
【0023】
車両状態取得部130は、自車の走行状態に関する情報を取得する。走行状態に関する情報として、GPS受信機などによる自車位置情報、自立航法センサーによる走行情報、車速センサーからの速度情報、ブレーキのオン、オフ情報、ウインカー情報などである。入力部140は、ユーザーからの入力を、マウス、キーボード、音声入力、タッチパネル等を介して受け取り、これを制御部190へ伝える。
【0024】
ナビゲーション部150は、車両状態取得部130で取得された自車位置情報に基づき自車位置を道路地図上にマッピングさせて地図案内をしたり、目的地までの誘導経路を案内する。記憶部160は、ナビゲーション部150に必要とされる道路地図情報を記憶したり、制御部190が実行するプログラムデータなどを記憶する。
【0025】
画像出力部170は、ナビゲーション部150が実行されたときにディスプレイ上に道路地図を表示させたり、交通情報を受信したときに警報などを表示させる。音声出力部180は、ナビゲーション部150が実行されたときに音声案内をスピーカーから出力させたり、交通情報を受信したときに警報などを出力させる。
【0026】
制御部190は、例えば、マイクロプロセッサ、マイクロコンピュータ、画像処理プロセッサなどを用いて構成され、ROMやRAMに格納されたプログラムを実行して運転支援動作を行うことができる。但し、制御部190は、ソフトウエア、ハードウエア、あるいはソフトウエアとハードウエアの組合せによって実現されるようにしてもよい。
【0027】
次に、本実施例の制御部190の機能ブロックを図5に示す。同図に示すように、制御部190は、交通情報取得部110で取得された交通情報を解析する交通情報解析部200を有する。DSSSから配信される交通情報は、自車が走行している道路の前方に存在する一時停止規制、信号機の現示表示、渋滞などの走行規制に関する情報を含んでいる。交通情報解析部200は、受信した交通情報から、規制の種別、規制対象までの位置、規制の内容などを解析する。
【0028】
画像処理部210は、撮像カメラ120によって撮像された自車前方の撮像データを受け取り、撮像データの歪み補正処理、撮像データに撮像された物体のエッジ(輪郭)検出処理などの画像処理を行う。このエッジ処理によって、自車前方にある、道路、標識、看板、信号機、ビルディング、前方車両などの輪郭情報が抽出される。
【0029】
前方視界判定部220は、画像処理部210で処理された画像データから、自車前方の視界の良否を判定する。視界の良否の判定は、例えば、抽出された物体のエッジと背景とのコントラスト比または明暗比を用い、それらの比が閾値以上であれば、視界が良好であると判定し、閾値未満であれば、視界が不良であると判定する。この際、撮像されたすべての物体または一定数の物体について上記の判定を行い、過半数以上の物体のコントラスト比または明暗比が閾値以上であれば、視界が良好であると判定するようにしてもよい。
【0030】
さらに前方視界判定部220は、撮像された特定の物体が画像認識することができるか否かを判定基準に用いることもできる。この場合、画像認識の対象となる物体の輪郭を識別するための参照データを記憶部160に格納しておき、参照データと画像処理によって抽出された物体のエッジ情報とのマッチングを行う。好ましくは、走行規制に関連する物体、例えば、一時停止を表す標識、信号機、路面上に記載された「止まれ」の文字や停止線などの画像認識が行われる。もし、マッチングしたならば、視界は良好と判定し、マッチングしなければ視界が不良と判定する。
【0031】
このような視界の判定を行うことにより、例えば、豪雨や暴風等の天候不良により自車前方の標識や信号機などを明瞭に認識することができないとき、降雪などの路面上の障害物により、路面上の一時停止ラインを明瞭に認識することができないとき、視界が不良と判定される。
【0032】
さらに前方視界判定部220は、自車前方に一定以上の高さを有する物体が撮像されたとき、自車前方の視界が遮られるため、視界が不良であると判定する。例えば、自車前方にバスやトラックなどの大型車が存在しているとき、自車前方の標識や信号機を見ることができなくなるので、このような場合、視界が不良であると判定される。好ましくは、画像処理部210および前方視界判定部220は、交通情報解析部200によって交通情報が解析されたことに応答して動作することができる。
【0033】
遵守判定部230は、交通情報から自車前方に走行規制があることが解析されたとき、自車の走行状態や走行規制までの距離などから自車が走行規制を遵守することができるか否かを判定する。例えば、一時停止線を越えずに停止することができないとき、赤信号の残り時間内に交差点に到達するとき、規制を遵守することができないことになる。警報作成部240は、前方視界判定部220により自車前方の視界が不良と判定されたとき、または遵守判定部230により走行規制を遵守することができないと判定されたとき、運転者に注意を喚起するための警報を作成する。
【0034】
次に、本実施例の運転支援装置の動作を図6のフローチャートを参照して説明する。自車の走行開始に伴いナビゲーション部150が動作される(ステップS101)。ナビゲーション部150は、GPS受信機や自立航法センサーから自車位置情報を受け取り、画像出力部170は、ディスプレイに自車位置周辺の道路地図や合成された自車位置マークを表示する。また、目的地が設定されていれば、目的地までの誘導経路も合成して表示する。
【0035】
交通情報取得部110は、DSSSからの交通情報が受信されたか否かを監視し(ステップS102)、交通情報が受信されると、それが交通情報解析部200によって解析される(ステップS103)。この解析により、自車前方に存在する走行規制の種別、位置および内容が抽出される(ステップS104)。
【0036】
次に、前方視界判定部220は、自車前方の視界の良否を判定する(ステップS105)。前方視界判定部220によって視界が不良と判定された場合には(ステップS106)、警報作成部240は、交通情報解析部200によって抽出された走行規制の種別、位置および内容に基づき自車前方に走行規制が存在することを知らせるための警報を作成し、この警報が提示される(ステップS107)。提示方法として、画像出力部170は、ディスプレイ上に表示されている道路地図上に警報画面を合成して表示したり、音声出力部180は、音声によりその旨の警報を報知することができる。例えば、「これより前方100メートル先に一時停止が存在します」などの警報を提示する。警報の提示は、一定時間、または断続的に行われても良い。
【0037】
次に、遵守判定部230は、自車の走行状態および走行規制までの距離などから、自車が走行規制を遵守できるか否かを判定する(ステップS108)。遵守することができないと判定した場合には、警報作成部240は、減速等を促す警告を作成し、これが提示される(ステップS109)。提示の方法は、ディスプレイに警報を表示したり、あるいは音声にて警報を報知する。他方、規制を遵守することができると判定された場合には、警告の提示は行われない。
【0038】
このように自車前方の視界が不良と判定された場合には、走行規制を遵守できるか否かを問わず、必ず、自車前方に存在する走行規制に関する警報が提示されるため、たとえ運転者が前方の走行規制を明瞭に認識することができないような状況であっても、注意が喚起され安全運転を強いられる。
【0039】
次に、交通情報から抽出された走行規制に関連する物体を画像認識することで視界の良否判定を行う好ましい例を図7のフローチャートを参照して説明する。DSSSによる交通情報が受信されると(ステップS201)、交通情報解析部200によって自車前方に存在する走行規制(例えば、一時停止や信号機など)までの距離が抽出される。この距離をLaとする。他方、撮像データを利用した画像認識は、撮像カメラ120によって目的物を十分に撮像できる位置に到達したときに行うことが望ましい。つまり、目的物までの距離が遠すぎると、それが原因で視界不良となるおそれがある。ここでは、撮像データから画像認識を十分に行うことができる距離をLbとする(ステップS202)。
【0040】
前方視界判定部220は、La>Lbのとき(ステップS203)、画像認識をするには遠すぎると判定し未だ画像認識による視界判定を行わず、自車がさらに走行規制に接近するのを待つ(ステップS204)。La=Lbに到達したとき(ステップS205)、前方視界判定部220は、距離Lbで撮像された撮像データに基づき走行規制の標識や信号機などの画像認識を行う(ステップS206)。前方視界判定部220は、目標物を画像認識することができたとき(ステップS207)、視界が良好であると判定し(ステップS208)、認識することができないとき、視界が不良であると判定する(ステップS209)。
【0041】
なお、上記の視界の判定は、走行規制の位置近傍にある標識等の目標物を画像認識する場合に用いられるものであり、それ以外の目標物について画像認識をする場合には、図7のフローによらず、交通情報を受信した直後の撮像データを画像認識し視界の良否判定をすることができる。
【0042】
次に、具体的な例を参照して説明する。図8は、交通情報として一時停止に関する情報を受信した例を示している。時間T1において、自車Mは、配信装置30から交通情報を受け取り、その情報を解析する。時間T2において、交通情報を受け取ったことに応答して視界の良否を判定し、その結果、視界が不良であると判定したと仮定する。時間T3において、視界が不良であると判定されたことに応答して、前方に一時停止の規制が存在することを知らせる警報を提示する。図9は、ディスプレイの道路画面300に、警報310が表示された例を示している。そして、時間T4において、一時停止線62で自車が停止することができないと判定されると、減速等を促す警報が提示される。
【0043】
図10は、交通情報として信号機に関する情報を受信した例を示している。自車Mは、配信装置30から前方に存在する信号機10に関する情報を受信する。前方視界判定部220は、自車から信号機を見ることができる距離に到達したとき、当該距離に基づき信号機10の高さまたは信号機10が見える方向を算出し、自車Mと信号機10が見える方向との間に車両が撮像されているか否かを判定する。図10(a)に示すように、信号機10を視認するのに障害となる車両P1が存在するとき、視界が不良と判定され、自車Mのディスプレイ300には、信号機10の灯色情報と残秒(図の例では、赤信号で残り20秒)の警報310が表示される。他方、図10(b)に示すように、障害となるような車両が存在しないとき、視界は良好と判定され、警報はディスプレイに表示されないが、運転者は、信号機10を見ることができるので、通常通り、前方確認の義務を履行する。
【0044】
図11は、交通情報として信号機に関する情報を受信したときの他の例を示している。
自車Mが信号機に関する情報を受信し、自車前方に信号機を見るのに障害となる車両P1が存在するとき、視界が不良と判定される。そして、自車Mのディスプレイ300には、信号機の灯色情報と右折可能な青矢が点灯しているか否かの警報310が表示される。図(a)の例では、青信号の灯色情報が示されている。通常、青信号は警告の対象にならないが、信号機の灯色表示パターンが青矢を含む場合で、かつ自車が右折レーンを通過する時、警告の対象とする。なお、信号機が赤信号で青矢のときにも、図(b)に示すような警報310がディスプレイ300の画面上に表示される。
【0045】
前方車両P1は、信号機10の灯色および対向車P2を確認して右折するが、自車Mの運転者は、青矢になったと思い込んで前方車両P1に続いて右折することなく、対向車P2を確認してから右折するように注意を喚起される。
【0046】
上記実施例では、自車が走行する前方に存在する一時停止や信号機などの走行規制に関する情報を受信し、かつ視界が不良と判定されたときに、警報を提示するようにしたが、例えば、自車と走行規制との間に脇道が存在し、その脇道を走行するような誘導経路が引かれている場合には、自車は走行規制を通らないので、警告を提示しないようにしてもよい。
【0047】
以上、本発明の好ましい実施の形態について詳述したが、本発明は、特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。上記実施例は、車載表示装置としての例を示したが、車載表示装置は、ナビゲーション装置、オーディオ・ビデオ装置と一体化されたシステム内に含まれるものであってもよい。
【符号の説明】
【0048】
10:信号機 20:路側機側の撮像カメラ
30:配信装置 40:優先道路
50:非優先道路 60:一時低の標識
62:一時停止のライン 100:運転支援装置
110:交通情報取得部 120:撮像カメラ
130:車両状態取得部 140:入力部
150:ナビゲーション部 160:記憶部
170:画像出力部 180:音声出力部
190:制御部 200:交通情報解析部
210:画像処理部 220:前方視界判定部
230:遵守判定部 240:警報作成部
300:ディスプレイ画面 310:警報
M:自車
P:渋滞末尾車両
P1、P2:車両
【特許請求の範囲】
【請求項1】
車外からの交通情報を利用して運転支援を行う運転支援装置であって、
自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信する受信手段と、
自車前方を撮像し、その撮像データを提供する撮像手段と、
前記撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定する判定手段と、
前記判定手段により自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示する提示手段と、
を有する運転支援装置。
【請求項2】
前記判定手段は、自車前方に撮像された物体の輪郭と背景とのコントラスト比が閾値未満のとき、視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項3】
前記判定手段は、自車前方の視界を遮る障害物が存在するとき視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項4】
前記判定手段は、自車前方の標識または信号機を画像認識することができないとき、視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項5】
前記判定手段は、自車前方の路面に表示された文字または図形を画像認識することができないとき、視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項6】
運転支援装置はさらに、前記受信した交通情報と自車の走行状態に基づき自車が前記走行規制を遵守することができるか否かを判定する遵守判定手段を含み、前記提示手段は、前記遵守判定手段により自車が走行規制を遵守できると判定された場合であっても前記判定手段により視界が不良であると判定された場合には、前記警報を提示する、請求項1ないし5いずれか1つに記載の運転支援装置。
【請求項7】
前記交通情報は、自車が走行している道路前方に存在する一時停止に関する情報を含み、前記提示手段は、一時停止が存在する警報を音声または画像にて提示する、請求項1ないし5いずれか1つに記載の運転支援装置。
【請求項8】
前記交通情報は、自車が走行している道路前方に存在する信号機に関する情報を含み、前記提示手段は、信号機の灯色状態を示す警報を画像により提示する、請求項1ないし5いずれか1つに記載の運転支援装置。
【請求項9】
前記警報は、灯色の残存時間を含む、請求項8に記載の運転支援装置。
【請求項10】
前記灯色状態は、信号機が赤表示でありかつ右折可能な青矢印の情報を含む、請求項8に記載の運転支援装置。
【請求項11】
前記提示手段は、自車が右折レーンを走行しているとき、信号機が青色の灯色である警報を提示する、請求項8に記載の運転支援装置。
【請求項12】
車外からの交通情報を利用して運転支援を行う運転支援方法であって、
自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、
自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、
前記自車前方の視界が不良であると判定されたとき、前記受信した交通情報に基づき警報を提示するステップと、
を有する運転支援方法。
【請求項13】
運転支援方法はさらに、前記受信した交通情報と自車の走行状態に基づき自車が前記走行規制を遵守することができるか否かを判定するステップを含み、前記提示するステップは、自車が走行規制を遵守できると判定された場合であっても視界が不良であると判定された場合には、前記警報を提示する、請求項12に記載の運転支援方法。
【請求項14】
車外からの交通情報を利用して運転支援を行う運転支援装置が実行する運転支援プログラムであって、
自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、
自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、
前記自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示するステップと、
を有する運転支援プログラム。
【請求項1】
車外からの交通情報を利用して運転支援を行う運転支援装置であって、
自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信する受信手段と、
自車前方を撮像し、その撮像データを提供する撮像手段と、
前記撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定する判定手段と、
前記判定手段により自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示する提示手段と、
を有する運転支援装置。
【請求項2】
前記判定手段は、自車前方に撮像された物体の輪郭と背景とのコントラスト比が閾値未満のとき、視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項3】
前記判定手段は、自車前方の視界を遮る障害物が存在するとき視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項4】
前記判定手段は、自車前方の標識または信号機を画像認識することができないとき、視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項5】
前記判定手段は、自車前方の路面に表示された文字または図形を画像認識することができないとき、視界が不良であると判定する、請求項1に記載の運転支援装置。
【請求項6】
運転支援装置はさらに、前記受信した交通情報と自車の走行状態に基づき自車が前記走行規制を遵守することができるか否かを判定する遵守判定手段を含み、前記提示手段は、前記遵守判定手段により自車が走行規制を遵守できると判定された場合であっても前記判定手段により視界が不良であると判定された場合には、前記警報を提示する、請求項1ないし5いずれか1つに記載の運転支援装置。
【請求項7】
前記交通情報は、自車が走行している道路前方に存在する一時停止に関する情報を含み、前記提示手段は、一時停止が存在する警報を音声または画像にて提示する、請求項1ないし5いずれか1つに記載の運転支援装置。
【請求項8】
前記交通情報は、自車が走行している道路前方に存在する信号機に関する情報を含み、前記提示手段は、信号機の灯色状態を示す警報を画像により提示する、請求項1ないし5いずれか1つに記載の運転支援装置。
【請求項9】
前記警報は、灯色の残存時間を含む、請求項8に記載の運転支援装置。
【請求項10】
前記灯色状態は、信号機が赤表示でありかつ右折可能な青矢印の情報を含む、請求項8に記載の運転支援装置。
【請求項11】
前記提示手段は、自車が右折レーンを走行しているとき、信号機が青色の灯色である警報を提示する、請求項8に記載の運転支援装置。
【請求項12】
車外からの交通情報を利用して運転支援を行う運転支援方法であって、
自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、
自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、
前記自車前方の視界が不良であると判定されたとき、前記受信した交通情報に基づき警報を提示するステップと、
を有する運転支援方法。
【請求項13】
運転支援方法はさらに、前記受信した交通情報と自車の走行状態に基づき自車が前記走行規制を遵守することができるか否かを判定するステップを含み、前記提示するステップは、自車が走行規制を遵守できると判定された場合であっても視界が不良であると判定された場合には、前記警報を提示する、請求項12に記載の運転支援方法。
【請求項14】
車外からの交通情報を利用して運転支援を行う運転支援装置が実行する運転支援プログラムであって、
自車が走行している道路前方に存在する走行規制に関する交通情報を無線により受信するステップと、
自車前方を撮像した撮像データを画像処理し、その処理結果に基づき自車前方の視界の良否を判定するステップと、
前記自車前方の視界が良くないと判定されたとき、前記受信した交通情報に基づき警報を提示するステップと、
を有する運転支援プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−108175(P2011−108175A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−265247(P2009−265247)
【出願日】平成21年11月20日(2009.11.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月20日(2009.11.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]