
運転支援装置、運転支援方法および運転支援プログラム
【課題】車両が走行している道路を正確に特定できない場合に、自動制御を実行することができなかった。
【解決手段】車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定し、前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する。
【解決手段】車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定し、前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御を実行することによって運転を支援する技術に関する。
【背景技術】
【0002】
従来、カーブ区間の曲率に適合した車速となるように車両の速度を制御するなどの自動制御技術が開発されている。自動制御を行う際には、道路の形状などに応じて制御目標を決定するため、車両が走行している道路を正確に特定できない場合には不適切な制御が実行され得る。そこで、例えば、特許文献1に開示された技術のように、車両が指定道路上に存在する確実度が低い場合に制御を中止する技術が開発されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−25538号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、車両が走行している道路を正確に特定できない場合に、自動制御を実行することができない。従って、車両制御が実行されるべきカーブ区間が前方に存在する2個の道路を比較した場合、双方の道路で同様の自動制御が行われることが期待される状況であるにもかかわらず、道路特定の確実性に応じて自動制御が実行される場合と実行されない場合とが発生し得る。このため、運転者はどのような状況で自動制御が実行されるのか予測することができず、運転者の信頼に足る運転支援を行うことができなかった。
本発明は、上記課題にかんがみてなされたもので、信頼性の高い運転支援を実行可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合に、当該複数の道路のうち、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を実行する。すなわち、車両前方に複数の道路が存在する場合に、車両においていずれの道路を走行する予定であるのか確定できない状況になり得る。しかし、車両においていずれの道路を走行する予定であるのか確定できない状況であったとしても、当該複数の道路のいずれにおいても同一の種類の車両制御を同一の制御目標で実行可能であれば、いずれの道路においても当該同一の種類の車両制御を実行することによる不都合は発生しない。そこで、複数の道路のいずれにおいても同一の種類の車両制御を同一の制御目標で実行可能な場合に、複数の道路のいずれに車両が到達した場合であっても当該同一の種類の車両制御を実行する。この結果、車両前方においていずれの道路を走行する予定であるのか確定できない状況においても運転支援を実施することが可能であり、運転支援の信頼性を高めることが可能である。
【0006】
ここで、車両制御可否判定手段は、車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができればよい。すなわち、車両前方の所定距離以内に存在する複数の道路を判定対象とすることにより、車両が所定距離走行するまでの間に到達する道路であって、車両制御による運転支援を行うべき道路が複数個存在し得る状況にて判定を行う。また、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することにより、いずれの道路において当該同一の種類の車両制御が実行されたとしても、不適切な車両制御を実行してしまうなどの不都合が発生しない状況であるか否かを判定することができればよい。
【0007】
車両前方の所定距離以内に存在する複数の道路は、現在以降に車両が走行する可能性のある複数の道路であれば良く、車両の位置を中心とし、所定距離を半径とした弧や半円の範囲内に存在する道路を検出する構成等によって判定対象となる複数の道路を特定すればよい。むろん、道路間で鉛直方向の高低差が生じている場合も考慮し、車両の位置を中心とし、所定距離を半径とした弧を車両前方に延びる軸周りに回転させた回転体や所定距離を半径とした半球の内部に存在する道路を検出する構成であっても良い。また、車両制御の種類は、車両制御の目的や制御対象によって区別可能であり、車両制御の目的や制御対象の全てあるいは一部が共通の制御を予め同一の種類として規定しても良いし、車両制御を実行するためのプログラムモジュールが共通である場合に同一の種類であるとみなしても良い。なお、車両制御の目的としては、車速の適正化や運転に必要な視野の照明、低燃費化、車両挙動の安定化など、各種の目的を想定し得る。また、制御対象としては、ブレーキ、変速機、サスペンション、ヘッドライトなどを想定し得る。
【0008】
さらに、車両制御の制御目標は、車両制御によって各制御対象にて達成すべき状態であり、最終的な目標であっても良いし、時系列的な目標であっても良い。前者の例としては、目標位置における目標車速を規定して減速制御する際の目標位置や目標車速が挙げられる。後者の例としては、目標位置における目標車速を規定して減速制御する際の現在位置から目標位置までの区間を走行する際の車速や加速度等が挙げられる。むろん、この場合、時間に対応付けて車速や加速度等が規定されても良いし、位置に対応付けて車速や加速度等が規定されても良い。
【0009】
車両制御手段は、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、複数の道路のうち、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を実行することができればよい。すなわち、車両においては走行道路を推定しながら走行しており、推定によって走行道路の候補となる道路は上述の複数の道路のいずれかであるため、当該複数の道路に向けて走行している過程や当該複数の道路のいずれかに到達した後に、当該同一の種類の車両制御を実行すればよい。車両制御の開始タイミングや制御内容は実行される車両制御に応じて適切に決定すればよい。制御目標は、上述の同一の制御目標であってもよいし、複数の道路のいずれにおいても不都合のない制御内容となる範囲で適宜制御目標を調整しても良い。
【0010】
さらに、複数の道路が類似している場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、車両制御の多くは、道路の形状や路面状態、道路上の地物(ペイント)などに基づく制御であるため、道路が類似している場合には実行すべき車両制御の種類および制御目標が同一であるとみなす。この構成によれば、簡易な判定処理によって同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができる。
【0011】
なお、複数の道路が類似しているか否かを判定する際には、複数の道路の形状や路面状態、地物の位置等を示す情報を取得して複数の道路が類似しているか否かを直接的に判定してもよいし、複数の道路が類似しているか否かを間接的に判定しても良い。後者としては、例えば、マップマッチング処理により、車両が走行している道路の候補が複数個特定され、複数の道路の候補のいずれが車両の走行道路であると確定することが困難である場合に当該複数の道路が類似しているとみなす構成等を採用可能である。
【0012】
すなわち、GPS受信部等によって特定された車両の軌跡と形状の一致度が高い道路上を走行しているとみなすマップマッチング処理を実行する場合、車両が走行中の道路の周辺に類似した形状の道路が存在すると、複数の道路が走行道路の候補となる。すなわち、マップマッチング処理において、通常は、道路の形状と車両の軌跡との一致度が最も高い道路が車両の走行道路であるとみなすが、複数の道路についての一致度に所定値以上の差がなければ当該複数の道路のいずれが走行道路であるのか正確に特定することは困難となる。この場合、走行道路の候補が複数となる。しかし、本発明においては、このような場合であっても従来の技術のように車両制御の実行を中止せず、いずれの道路で実行されたとしても不都合がない車両制御が実行されるため、従来実行されなかった車両制御が実行されることになり、運転支援の信頼性を高めることが可能である。
【0013】
さらに、複数の道路のそれぞれについて制御目標を規定する要素を比較し、要素同士の差が所定範囲内である場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、制御目標を規定する要素が類似していれば当該要素から規定される制御目標と当該要素に応じて実行すべき車両制御の種類が同一になるとみなす。この構成によれば、簡易な判定処理によって同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができる。
【0014】
なお、制御目標を規定する要素は、制御目標を特定するために参照されるパラメータであれば良く、例えば、道路の形状に対応した旋回方向や曲率、カーブ区間の開始位置等を示す情報や路面上の段差の大きさや位置、路面上の地物(停止線ペイント等)の位置等を示す情報によって当該要素を構成することが可能である。また、要素同士の差を評価するための所定範囲は、道路が類似しているか否かを判定するための基準となれば良く、要素が数値の場合には要素同士の数値の差が所定範囲内である場合に、同一の種類の車両制御を同一の制御目標で実行不可能になるほど要素同士に差異がないと判定できるように所定範囲を数値範囲として規定してあればよい。また、要素が数値以外の情報、例えば、旋回方向等の状態を示す情報である場合、要素が一致する場合に要素同士の差が所定範囲であり、要素が異なる場合に要素同士の差が所定範囲ではないと判定できるように所定範囲を定義する構成等を採用可能である。
【0015】
さらに、複数の種類の車両制御を実行可能な車両においては、複数の種類の前記車両制御のそれぞれについて制御目標を規定する要素が予め決められており、複数の道路において実行対象となる車両制御の種類に応じて要素を特定する構成とすることが好ましい。すなわち、異なる種類の車両制御においては異なる要素に基づいて制御目標が決定されるため、車両制御の種類に応じて要素を特定すれば、極めて容易に参照すべき要素を特定することが可能である。より具体的には、車両制御の種類毎に車両制御を実行するためのプログラムモジュールが異なる場合に、プログラムモジュールと要素とを対応付けておけば、実行対象のプログラムモジュールが起動された場合に、極めて容易に要素を抽出し、要素同士の差が所定範囲内であるか否かを判定することが可能になる。
【0016】
さらに、同一の種類の車両制御を複数の道路のそれぞれにおいて実行する場合の制御目標を特定し、特定された制御目標が同一である場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、複数の道路のそれぞれで実際に同一の車両制御を実行することを想定した場合に、それぞれの道路での制御目標を実際に決定する。そして、当該決定された制御目標が同一であれば、同一の種類の車両制御を同一の制御目標で実行可能であると判定することができる。
【0017】
さらに、本発明のように、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、車両の走行道路の候補となっている道路において同一の種類の車両制御を実行する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0018】
【図1】運転支援装置のブロック図である。
【図2】運転支援処理を示すフローチャートである。
【図3】車両制御の実行可否の判定を説明する図である。
【図4】車両制御の実行可否の判定を説明する図である。
【発明を実施するための形態】
【0019】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)運転支援処理:
(3)他の実施形態:
【0020】
(1)ナビゲーション装置の構成:
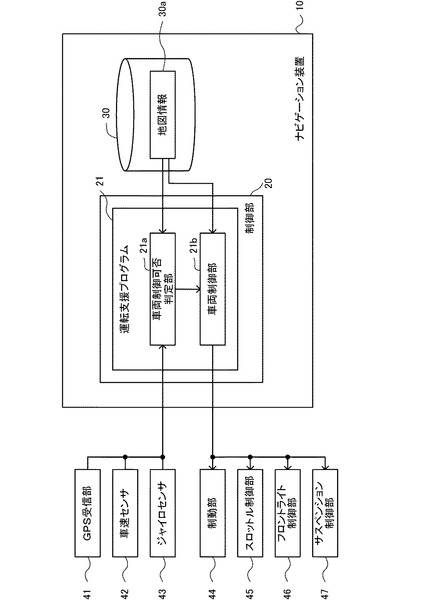
図1は、本発明にかかる運転支援装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20と記録媒体30とを備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとしてナビゲーションプログラムを実施可能であり、当該ナビゲーションプログラムを構成するプログラムモジュールの一つとして運転支援プログラム21を備えている。
【0021】
記録媒体30には、予め地図情報30aが記録されている。地図情報30aは、車両の位置の特定等に利用される情報であり、車両が走行する道路上に設定されたノードの位置等を示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(停止線を示すペイントや建物等)の位置および種類等を示す地物データ,路面上に存在する段差の位置を示す段差データ等を含んでいる。なお、道路がカーブ区間である場合には形状補間点データがその道路に相当するリンクを示すリンクデータに対応付けられ、道路上に段差、停止線ペイントが存在する場合には段差データ、停止線ペイントを示す地物データがその道路に相当するリンクを示すリンクデータに対応付けられている。
【0022】
本実施形態における車両(ナビゲーション装置10が搭載された車両)は、運転支援プログラム21による機能を実現するためにGPS受信部41と車速センサ42とジャイロセンサ43と制動部44とスロットル制御部45とフロントライト制御部46とサスペンション制御部47とを備えており、これらの各部と制御部20とが協働することによって運転支援プログラム21による機能を実現する。
【0023】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の速度を取得する。ジャイロセンサ43は、車両の向きに対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43等は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。
【0024】
本実施形態においては、マップマッチング処理によって車両の現在位置を補正する構成を採用している。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいて特定される車両の走行軌跡と地図情報30aが示す道路の形状との一致度が最も高い道路を車両が走行している走行道路であるとみなして車両の現在位置を補正するマップマッチング処理を行う。なお、車両の走行軌跡と道路の形状との一致度を特定する際には、GPS受信部41の出力信号に基づいて特定される車両の現在位置から所定範囲内に存在する道路のそれぞれと走行軌跡とについての一致度を特定する。この結果、複数の道路について走行軌跡と形状との一致度が特定され、複数の道路の中から一致度が最も高い道路が車両の走行道路であるとみなされる。但し、制御部20は、一致度が最も高い道路についての一致度と他の道路についての一致度との差が所定値以上でなければこれらの道路のいずれが走行道路であるのか正確に特定することは困難とであるとみなす。この場合、走行道路の候補が複数であり、一致度が最も高い道路が走行道路であると予測された状態となる。
【0025】
制動部44は、車両の車輪に搭載されたブレーキによる減速の程度を調整するホイールシリンダの圧力を制御する装置を含み、制御部20は当該制動部44に対して制御信号を出力してホイールシリンダの圧力を調整させることが可能である。従って、制御部20が当該制動部44に対して制御信号を出力してホイールシリンダの圧力を増加させると、ブレーキによる制動力が増加し、車両が減速される。
【0026】
スロットル制御部45は、車両に搭載されたエンジンに供給する空気の量を調整するためのスロットルバルブを制御する装置を含み、制御部20は当該スロットル制御部45に対して制御信号を出力してスロットルバルブの開度を調整することが可能である。従って、制御部20が当該スロットル制御部45に対して制御信号を出力して吸気量を増減させると、エンジンの回転数が増減する。
【0027】
フロントライト制御部46は、車両の前方を照らすフロントライトの光軸方向を変更するため装置を含み、制御部20は当該フロントライト制御部46に対して制御信号を出力してフロントライトの光軸方向を調整することが可能である。従って、制御部20が当該フロントライト制御部46に対して制御信号を出力して光軸方向を変更すると、車両の前方においてフロントライトによって照らされる領域が変動する。
【0028】
サスペンション制御部47は、車両に搭載された防振機構であり、路面から車両に作用する外力の伝達特性(サスペンションのかたさ)を調整可能な機構を備えている。制御部20は、当該サスペンション制御部47に対して制御信号を出力して上述の伝達特性を調整することができる。従って、制御部20が当該サスペンション制御部47に対して制御信号を出力して外力の伝達特性を調整すると、段差の存在する路面やカーブ区間での走行安定性が変動する。
【0029】
制御部20は、ナビゲーションプログラムを実行することにより上述のマップマッチング処理を行って車両の現在位置を特定し、運転支援プログラム21は当該現在位置よりも前方の道路における運転を支援する処理を行う。当該運転支援を行うため、運転支援プログラム21は車両制御可否判定部21aと車両制御部21bとを備えている。
【0030】
車両制御可否判定部21aは、車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、マップマッチング処理によって特定された車両の現在位置を示す情報を取得し、地図情報30aを参照して当該現在位置よりも前方の所定範囲(車両の前方方向から±90°かつ車両から所定距離の範囲)に制御対象となる複数の道路が存在するか否かを判定する。本実施形態においては、カーブ区間と路面上の段差と停止線ペイントとに応じた車両制御を行う構成が採用されている。そこで、制御部20は、地図情報30aを参照し、現在位置よりも前方の所定範囲の領域に存在する複数の道路を示すリンクデータに対して、カーブ区間の形状(カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置)を示す情報が対応付けられている場合に、カーブ区間に関する車両制御の制御対象となる複数の道路が存在すると判定する。
【0031】
また、制御部20は、地図情報30aを参照し、現在位置よりも前方の所定範囲の領域に存在する複数の道路を示すリンクデータに対して、段差の位置を示す情報が対応付けられている場合に、段差位置に関する車両制御の制御対象となる複数の道路が存在すると判定する。さらに、制御部20は、地図情報30aを参照し、現在位置よりも前方の所定範囲の領域に存在する複数の道路を示すリンクデータに対して、停止線ペイントの位置を示す情報が対応付けられている場合に、停止線ペイントに関する車両制御の制御対象となる複数の道路が存在すると判定する。なお、カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置は形状補間点データに基づいて特定される。すなわち、形状補間点データに基づいて特定される隣接する形状補間点同士の位置関係から旋回方向が特定され、形状補間点の中の少なくとも3点の位置からカーブ区間の曲率が特定され、形状補間点列の端点の一方からカーブ区間の開始位置が特定され、形状補間点列の端点の他方からカーブ区間の終了位置が特定される。
【0032】
さらに、本実施形態においては、車両制御の種類毎に制御目標を規定する要素が予め決められており、カーブ区間に関する車両制御については、カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報が制御目標を規定する要素になっている。また、段差位置に関する車両制御については、段差の位置を示す情報が制御目標を規定する要素になっている。さらに、停止線ペイントに関する車両制御については、停止線ペイントの位置を示す情報が制御目標を規定する要素になっている。そこで、制御部20は、カーブ区間において実施され得る車両制御の種類毎に要素を選択し、要素同士の差が所定範囲内である車両制御の種類に関しては、複数の道路において同一の制御目標で実行可能であると判定する。
【0033】
車両制御部21bは、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、複数の道路のうち、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を実行する機能を制御部20に実現させるモジュールである。すなわち、車両制御可否判定部21aによって、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であると判定された場合、当該複数の道路のいずれにおいて当該同一の種類の車両制御を実行しても車両に不都合を生じさせることなく運転支援を行うことができる。そこで、制御部20は、実行可能であると判定された種類の車両制御を、マップマッチング処理によって走行道路として推定された道路の候補において実行する。
【0034】
なお、本実施形態において、制御部20は、当該車両制御を実行する場合の制御目標を、複数の道路において実行可能であると判定された上述の同一の制御目標とする。すなわち、本実施形態において制御目標を規定する要素は、上述のように、カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報と、段差の位置を示す情報と、停止線ペイントの位置を示す情報とであるため、車両の走行道路として推定された道路に関してのこれらの情報に基づいて当該走行道路で実施すべき制御目標を特定し、車両制御を実行する。車両制御は、制御部20が、制動部44,スロットル制御部45,フロントライト制御部46,サスペンション制御部47のいずれかまたは組み合わせに対して制御信号を出力することによって実行される。当該車両制御の詳細は後述する。
【0035】
以上の構成においては、車両前方においていずれの道路を走行する予定であるのか確定できない状況においても運転支援を実施することが可能であり、運転支援の信頼性を高めることが可能である。すなわち、上述のマップマッチング処理において、走行道路の候補が複数であって走行軌跡との一致度が最も高い道路と他の道路についての一致度との差が所定値よりも小さい場合、一致度が最も高い道路が走行道路であると予測された状態である。この場合、車両においていずれの道路を走行する予定であるのか確定できないため、従来は制御を行わない構成としたが、本実施形態においては、複数の道路のいずれにおいても同一の種類の車両制御を同一の制御目標で実行可能である場合に車両制御を行う構成としているため、不適切な制御が実行されることなく車両制御を行って運転支援を行うことが可能である。
【0036】
(2)運転支援処理:
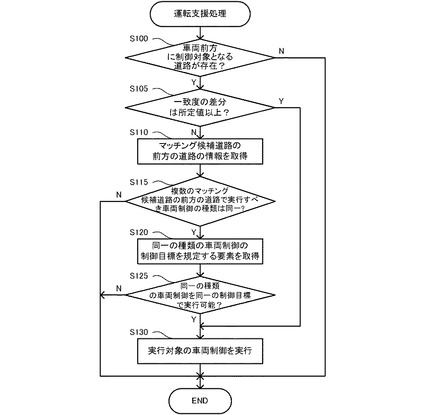
次に、以上の構成においてナビゲーション装置10が実施する運転支援処理を説明する。図2は、運転支援プログラム21による運転支援処理を示すフローチャートであり、当該運転支援処理は所定の期間(例えば、100ms)毎に実行される。また、表1は、本実施形態にて実行可能な車両制御の種類と各種類の車両制御の制御目標を決める要素が車両制御の種類毎に示されている。表1に示すように、本実施形態においては、カーブ区間を目標車速で定速走行するためにカーブ区間の開始位置における車速を目標車速とする減速制御(カーブ区間の減速制御)と、カーブ区間の旋回方向に応じてフロントライトの光軸方向を制御する車両制御(フロントライト光軸制御)と、カーブ区間の旋回方向および曲率に応じてサスペンションの減衰特性を制御することによって走行安定性を向上させる車両制御(カーブ区間のサスペンション制御)と、路面上の段差位置に応じてサスペンションの減衰特性を制御することによって走行安定性を向上させる車両制御(段差位置のサスペンション制御)と、路面上の停止線ペイント付近において停止線以前に停止するための減速制御(一時停止支援)とを実行可能である。また、表1においては、カーブ区間の旋回方向と、カーブ区間の曲率と、カーブ区間の開始位置と終了位置と、段差の位置と停止線ペイントの位置とが車両制御の要素となり得ることを示し、丸が車両制御の要素であることを示し、×は車両制御の要素ではないことを示している。
【表1】

【0037】
図2に示す運転支援処理において、制御部20は、車両制御可否判定部21aの処理により、車両前方に制御対象となる道路が存在するか否かを判定する(ステップS100)。すなわち、運転支援処理において、制御部20は、まず、本実施形態における車両制御の対象となる道路が車両前方に存在し、車両制御の実行の可否を判定すべき状況であるか否かを判定することとしている。具体的には、制御部20は、地図情報30aを参照し、車両の現在位置の前方方向から±90°の範囲の道路を検索対象として、カーブ区間であることを示す形状補間点データを検索し、当該形状補間点データが検索された場合には、車両前方に制御対象となるカーブ区間が存在すると判定する。また、同様の道路を検索対象として段差データを検索し、段差データが存在する場合には、車両前方に制御対象となる段差が存在すると判定する。さらに、同様の道路を検索対象として停止線ペイントを示す地物データを検索し、停止線ペイントを示す地物データが存在する場合には、車両前方に制御対象となる停止線が存在すると判定する。
【0038】
ステップS100にて、車両前方に制御対象となる道路が存在すると判定されない場合、制御部20は、図2に示す運転支援処理を終了する。一方、ステップS100にて、車両前方に制御対象となる道路が存在すると判定された場合、制御部20は、車両制御可否判定部21aの処理により、マップマッチング処理によって特定された車両前方の所定範囲に存在する複数の道路についての一致度を取得し、一致度が最も高い道路についての一致度と他の道路についての一致度との差分が所定値以上であるか否かを判定する(ステップS105)。ステップS105において、一致度の差分が所定値以上であると判定された場合、一致度が最も高い道路が走行道路であるとみなすことができる(走行道路を確定することができる)ため、制御部20は、車両制御部21bの処理により、当該一致度が最も高い道路を車両制御の実行対象としてステップS130の処理を実行する。なお、一致度の判定対象となる道路が複数でなく一個のみである場合にも走行道路を確定することができるため、ステップS105において一致度の差分は所定値以上であるとみなす。
【0039】
一方、ステップS105にて、一致度の差分が所定値以上であると判定されない場合、一致度が最も高い道路が車両の走行道路であると推定された状態となるが、一致度の差分が所定値より小さく、実際には車両が走行している可能性がある他の道路が複数存在することになる(ここで、当該他の道路と一致度が最も高い道路とをマッチング候補道路と呼ぶ)。そこで、制御部20は、ステップS110〜S125において、一致度が最も高い道路において実行すべき車両制御を他のマッチング候補道路において実行した場合に不適切な制御となるか否かを判定する。
【0040】
このためにまず制御部20は、車両制御可否判定部21aの処理により、マッチング候補道路の前方の道路の情報を取得する(ステップS110)。すなわち、本実施形態において制御対象となる道路は、カーブ区間と路面上に段差が存在する道路と路面上に停止線ペイントが存在する道路である。そこで、制御部20は、各マッチング候補道路について車両前方の所定範囲に含まれるリンクを判定対象リンクとして特定し、地図情報30aを参照して判定対象リンクを示すリンクデータに対応づけられた情報(形状補間点データ、段差データ、停止線ペイントを示す地物データ)を取得する。
【0041】
次に、制御部20は、車両制御可否判定部21aの処理により、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であるか否かを判定する(ステップS115)。すなわち、制御部20は、ステップS110にて取得された前方の道路の情報が複数のマッチング候補道路で共通する場合には、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であると判定する。
【0042】
具体的には、複数のマッチング候補道路の前方の複数の道路についての判定対象リンクに対してカーブ区間であることを示す形状補間点データが対応付けられている場合には、複数のマッチング候補道路の前方の道路にて同一の車両制御であるカーブ区間に関する車両制御(カーブ区間の減速制御、フロントライト光軸制御、カーブ区間のサスペンション制御)を実行すべきであると判定される。また、複数のマッチング候補道路の前方の複数の複数の道路についての判定対象リンクに対して段差データが対応付けられている場合には、複数のマッチング候補道路の前方の道路にて同一の車両制御である段差位置のサスペンション制御を実行すべきであると判定される。さらに、複数のマッチング候補道路の前方の複数の道路についての判定対象リンクに対して停止線ペイントを示す地物データが対応付けられている場合には、複数のマッチング候補道路の前方の道路にて同一の車両制御である一時停止支援を実行すべきであると判定される。
【0043】
ステップS115にて、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であると判定されない場合、制御部20は、図2に示す処理を終了する。一方、ステップS115にて、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であると判定された場合、制御部20は、車両制御可否判定部21aの処理により、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御に関して、当該同一の種類の車両制御の制御目標を規定する要素を取得する(ステップS120)。すなわち、制御部20は、表1に示すような車両制御の種類と要素との関係を示すマップを参照し、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御に対応した要素を特定する。また、制御部20は、地図情報30aを参照し、特定された要素を示す情報を取得する。例えば、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がカーブ区間の減速制御である場合、制御部20は、表1に基づいて制御目標を規定する要素がカーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置であることを特定し、地図情報30aからカーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報を取得する。
【0044】
次に、制御部20は、車両制御可否判定部21aの処理により、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する(ステップS125)。すなわち、制御部20は、ステップS120にて取得した複数のマッチング候補道路の前方の道路に関する要素を比較し、要素同士の差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。なお、本実施形態においては、要素が数値の場合には数値範囲によって要素同士の差が所定範囲であるか否か判定され、要素が旋回方向を示す情報である場合要素が一致する場合に要素同士の差が所定範囲内であると判定される。
【0045】
例えば、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がカーブ区間の減速制御である場合、制御部20は、複数の道路についてのカーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とを特定し、各差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態におけるカーブ区間の減速制御では、カーブ区間の曲率に応じた目標車速となるまで車速を減速させるための加速度が特定されるとともに、車両の現在位置からカーブ区間の開始位置までの区間を当該加速度で走行し、カーブ区間の開始位置からカーブ区間の終了位置までの区間において定速走行するように車両が制御される。そこで、本実施形態においては、表1に示される要素であるのカーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とが所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標でカーブ区間の減速制御が実行可能であると判定される構成を採用している。
【0046】
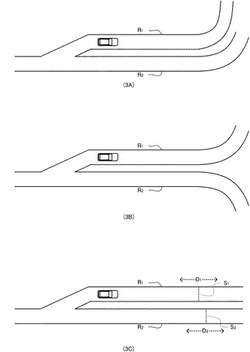
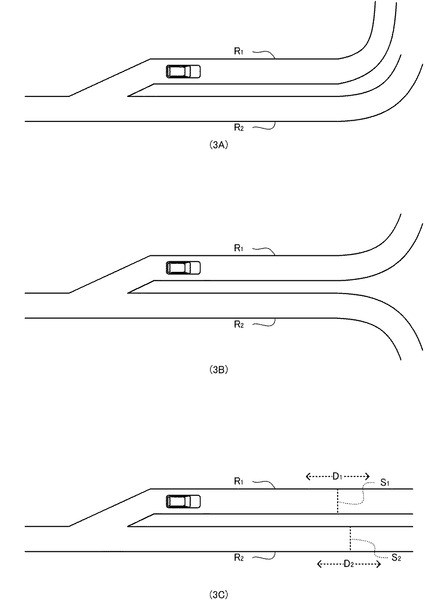
図3Aは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1,R2の前方の道路が左に旋回している例を示している。図3Bは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1の前方の道路が左、マッチング候補道路R2の前方の道路が右に旋回している例を示している。さらに、図3A,3Bに示す例において、マッチング候補道路R1,R2の前方の道路におけるカーブ区間の曲率の差とカーブ区間の開始位置の差とカーブ区間の終了位置の差が所定範囲内であるとする。この場合、図3A,3Bに示す例のいずれにおいても、表1に示される要素であるカーブ区間の曲率の差とカーブ区間の開始位置の差とカーブ区間の終了位置の差の全てが所定範囲内であるため、図3A,3Bに示す例におけるマッチング候補道路R1,R2の前方の道路にて同一の制御目標でカーブ区間の減速制御を行ったとしても不適切な制御にはならない。従って、図3A,3Bに示す例においては、マッチング候補道路R1,R2の前方の道路において同一の制御目標でカーブ区間の減速制御が実行可能であると判定される。
【0047】
一方、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がフロントライト光軸制御である場合、制御部20は、複数の道路についてのカーブ区間の旋回方向の差とカーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とを特定し、各差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態におけるフロントライト光軸制御では、カーブ区間の開始位置からカーブ区間の終了位置までの区間において、カーブ区間の旋回方向および曲率に応じて路面を効率的に照らすようにフロントライトの光軸方向が制御される。そこで、本実施形態においては、表1に示される要素であるのカーブ区間の旋回方向の差と、カーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とが所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標でカーブ区間の減速制御が実行可能であると判定される構成を採用している。
【0048】
図3A,3Bに示す例において、マッチング候補道路R1,R2の前方の道路におけるカーブ区間の曲率の差とカーブ区間の開始位置の差とカーブ区間の終了位置の差が所定範囲内であるが、図3Aにおいては旋回方向が一致し、図3Bにおいては旋回方向が異なる。従って、図3Aに示すマッチング候補道路R1,R2の前方の道路におけるカーブ区間の旋回方向の差は所定範囲内であり、図3Bに示すマッチング候補道路R1,R2の前方の道路におけるカーブ区間の旋回方向の差は所定範囲内ではないと判定される。この結果、図3Aに示す例においてはマッチング候補道路R1,R2の前方の道路において同一の制御目標でフロントライト光軸制御が実行可能であると判定される。一方、図3Bに示す例においてはマッチング候補道路R1,R2の前方の道路において同一の制御目標でフロントライト光軸制御が実行可能であると判定されない。
【0049】
複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がカーブ区間のサスペンション制御である場合、表1に示すように制御目標を規定する要素がフロントライト光軸制御と共通である。同一の制御目標でカーブ区間のサスペンション制御を実行可能であるか否かの判定の結果は、フロントライト光軸制御における判定の結果と同一である。
【0050】
さらに、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御が段差位置のサスペンション制御である場合、制御部20は、複数の道路についての段差位置の差(段差位置と車両との距離の差)を特定し、当該差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態において段差位置に応じたサスペンションの減衰力の制御は、段差の前後の所定範囲(段差S1に関して範囲D1、段差S2に関して範囲D2)で実行される。そこで、本実施形態においては、表1に示される要素である段差位置の差が所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標で段差位置のサスペンション制御が実行可能であると判定される構成を採用している。
【0051】
図3Cは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1,R2の前方の道路に段差S1,S2が存在する例を示している。また、図3Cにおいては、サスペンションの減衰力の制御範囲であるD1,D2は重複し、いずれの範囲でサスペンションの減衰力を制御したとしても適切な制御が行われる例を示している。従って、図3Cに示す例においては、段差位置の差が所定範囲内であると判定され、マッチング候補道路R1,R2の前方の道路において同一の制御目標で段差位置のサスペンション制御が実行可能であると判定される。なお、本実施形態においては段差位置のサスペンション制御の制御目標を規定する要素として段差位置が例示されているが、むろん制御目標を規定する要素に段差の大きさを加えても良い。
【0052】
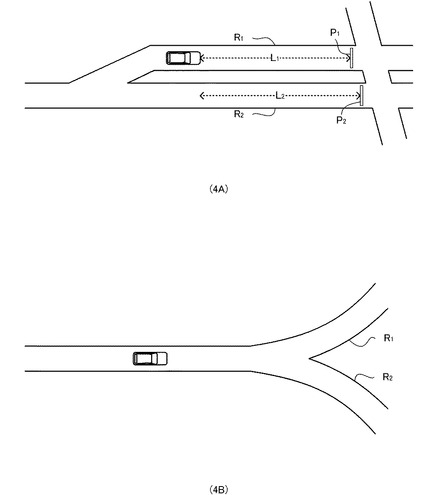
さらに、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御が一時停止支援である場合、制御部20は、複数の道路についての停止線ペイントの位置の差(停止線ペイントの位置と車両との距離の差)を特定し、当該差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態において停止線ペイントの位置に応じた一時停止支援は、停止線ペイントの位置に車両を停止させる減速制御であり、車両の現在位置から停止線ペイントの位置までの距離に応じて車両の加速度が特定され、当該加速度で車両を走行させる車両制御が実行される。そこで、本実施形態においては、表1に示される要素である停止線ペイントの位置の差が所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標で一時停止支援が実行可能であると判定される構成を採用している。
【0053】
図4Aは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1,R2の前方の道路に停止線ペイントP1,P2が存在する例を示している。また、図4Aに示す例において、停止線ペイントP1,P2は近い位置に存在し、いずれの停止線ペイントP1,P2を目標とした減速制御を行ったとしても適切な制御が行われる。従って、図4Aに示す例においては、停止線ペイントの位置の差が所定範囲内であると判定され、マッチング候補道路R1,R2の前方の道路において同一の制御目標で一時停止支援が実行可能であると判定される。
【0054】
ステップS125にて同一の種類の車両制御を同一の制御目標の車両制御を実行可能であると判定されない場合、車両制御を実行すると不適切な車両制御となる可能性があるとみなし、図2に示す処理を終了する。一方、ステップS125にて同一の種類の車両制御を同一の制御目標の車両制御を実行可能であると判定された場合、制御部20は、車両制御部21bの処理により、実行対象の車両制御を実行する(ステップS130)。すなわち、ステップS125の判定を経てステップS130を実行する場合、制御部20は、ステップS125で実行可能とされた種類の車両制御を実行対象の車両制御とする。また、ステップS105の判定を経てステップS130を実行する場合、制御部20は、上述の一致度が最も高い道路にて実行すべき車両制御を実行対象の車両制御とする。
【0055】
なお、各種類の車両制御が実行対象となった場合の制御は以下の通りに実行される。例えば、実行対象の車両制御がカーブ区間の減速制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関するカーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報に基づいて現在位置における現在車速をカーブ区間の開始位置にて目標車速となるように減速させるための加速度を特定する。そして、制御部20は、車両の現在位置からカーブ区間の開始位置までの区間を当該加速度で走行し、カーブ区間の開始位置からカーブ区間の終了位置までの区間において定速走行することを制御目標とし、車両の現在位置からカーブ区間の開始位置までの区間にて上述の加速度が車両に作用した状態となり、カーブ区間の開始位置からカーブ区間の終了位置までの区間にて定速で車両が走行するように制動部44,スロットル制御部45に制御信号を出力する。この結果、車両の現在位置からカーブ区間の開始位置までの区間において、当該加速度が車両に作用するように制動力、スロットルバルブの開度が制御される。
【0056】
また、実行対象の車両制御がフロントライト光軸制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関するカーブ区間の旋回方向および曲率に基づいてカーブ区間の路面を効果的に照らすためのフロントライトの光軸方向を特定する。そして、制御部20は、カーブ区間の開始位置からカーブ区間の終了位置までの区間にて当該特定された光軸方向にフロントライトの光軸方向を向けることを制御目標とし、フロントライト制御部46に対して制御信号を出力してカーブ区間の開始位置からカーブ区間の終了位置までの区間におけるフロントライトの光軸が上述の制御目標に一致するように制御する。
【0057】
さらに、実行対象の車両制御がカーブ区間のサスペンション制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関するカーブ区間の旋回方向および曲率に基づいて走行安定性を向上させるためのサスペンションの減衰特性を特定する。本実施形態においては、曲率が大きいほど減衰力を大きく(サスペンションをかたく)するように設定される。従って、制御部20は、カーブ区間の曲率に対応する基準の減衰力を特定するとともに、カーブ区間の旋回方向に応じて左右の車輪と曲率中心との位置関係を特定し、曲率中心に近い車輪の方が遠い車輪よりも減衰力が大きくなるように基準の減衰力を補正して左右の減衰力を特定する。そして、制御部20は、カーブ区間の開始位置からカーブ区間の終了位置までの区間にてサスペンションを当該特定された減衰力にすることを制御目標とし、サスペンション制御部47に対して制御信号を出力してカーブ区間の開始位置からカーブ区間の終了位置までの区間におけるサスペンションの減衰力が上述の制御目標に一致するように制御する。
【0058】
さらに、実行対象の車両制御が段差位置のサスペンション制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関する段差の位置に基づいて走行安定性を向上させるためのサスペンションの減衰特性を特定する。そして、制御部20は、段差の位置の前後に所定距離の範囲の区間にてサスペンションを当該特定された減衰力にすることを制御目標とし、サスペンション制御部47に対して制御信号を出力して段差の位置の前後に所定距離の範囲の区間におけるサスペンションの減衰力が上述の制御目標に一致するように制御する。
【0059】
さらに、実行対象の車両制御が一時停止支援の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関する停止線ペイントの位置を示す情報に基づいて現在位置における現在車速を停止線の位置にて0km/hとなるように減速させるための加速度を特定する。そして、制御部20は、車両の現在位置から停止線の位置までの区間を当該加速度で走行することを制御目標とし、車両の現在位置から停止線の位置までの区間にて上述の加速度が車両に作用した状態となるように制動部44,スロットル制御部45に制御信号を出力する。この結果、車両の現在位置から停止線の位置までの区間において、当該加速度が車両に作用するように制動力、スロットルバルブの開度が制御され、停止線の位置で車両が停止される。
【0060】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、車両の走行道路の候補となっている道路において同一の種類の車両制御を実行する限りにおいて、他にも種々の実施形態を採用可能である。例えば、車両前方の複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する対象となる道路は、現在以降に車両が走行する可能性のある複数の道路であれば良く、車両の位置を中心とし、所定距離を半径とした弧やの範囲内に存在する道路を対象としても良い。むろん、道路間で鉛直方向の高低差が生じている場合も考慮し、車両の位置を中心とし、所定距離を半径とした弧を車両前方に延びる軸周りに回転させた回転体や所定距離を半径とした半球の内部に存在する道路を検出する構成であっても良い。
【0061】
さらに、車両制御の種類は、上述の種類に限定されず、種類の区分法も上述の例に限定されない。すなわち、車両制御の種類は車両制御の目的や制御対象によって区別可能であり、車両制御の目的や制御対象の全てあるいは一部が共通の制御を予め同一の種類として規定しても良いし、車両制御を実行するためのプログラムモジュールが共通である場合に同一の種類であるとみなしても良い。
【0062】
さらに、車両制御の制御目標は、車両制御によって各制御対象にて達成すべき状態であり、最終的な目標であっても良いし、時系列的な目標であっても良い。前者の例としては、目標位置における目標車速を規定して減速制御する際の目標位置や目標車速が挙げられる。後者の例としては、目標位置における目標車速を規定して減速制御する際の現在位置から目標位置までの区間を走行する際の車速や加速度等が挙げられる。むろん、この場合、時間に対応付けて車速や加速度等が規定されても良いし、位置に対応付けて車速や加速度等が規定されても良い。
【0063】
さらに、上述の実施形態においては、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であると判定された場合に、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を同一の制御目標で実行する構成であったが、制御目標は当該同一の制御目標でなくても良い。すなわち、車両制御が実行可能であるか否かを判定する際の指標となる「同一の制御目標」と実際に車両制御が実行される際の「制御目標」が異なっていても良い。例えば、複数の道路のいずれにおいても不都合のない制御内容となる範囲で減速力を抑制するなど適宜制御目標を調整しても良い。
【0064】
さらに、車両制御可否判定部21aにおける、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるとの判定は、当該判定に応じて当該同一の種類の車両制御が実行された場合に不適切な車両制御とならないような判定であればよい。従って、上述のような制御目標を規定するための要素を比較する構成の他にも種々の手法によって判定を行うことができる。例えば、車両前方の複数の道路が類似している場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、車両制御の多くは、道路の形状や路面状態、道路上の地物(ペイント)などに基づく制御であるため、道路が類似している場合には実行すべき車両制御の種類および制御目標が同一であるとみなす。この構成によれば、簡易な判定処理によって同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができる。
【0065】
なお、複数の道路が類似しているか否かを判定する際には、複数の道路の形状や路面状態、地物の位置等を示す情報を取得して複数の道路が類似しているか否かを直接的に判定してもよいし、複数の道路が類似しているか否かを間接的に判定しても良い。後者としては、例えば、マップマッチング処理により、車両が走行している道路の候補が複数個特定され、複数の道路の候補のいずれが車両の走行道路であると確定することが困難である場合に当該複数の道路が類似しているとみなす構成等を採用可能である。
【0066】
さらに、上述の実施形態おいては、車両制御に対応する要素を選択し、要素同士の差に基づいて同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する構成であったが、他の手法によって要素を選択する構成としても良い。例えば、車両制御の種類毎に車両制御を実行するためのプログラムモジュールが異なる場合に、プログラムモジュールと要素とを対応付けておけば、実行対象のプログラムモジュールが起動された場合に、極めて容易に要素を抽出し、要素同士の差が所定範囲内であるか否かを判定することが可能になる。
【0067】
要素同士の差を比較する構成ではなく、同一の種類の車両制御を複数の道路のそれぞれにおいて実行する場合の制御目標を特定し、特定された制御目標が同一である場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、複数の道路のそれぞれで実際に同一の車両制御を実行することを想定した場合に、それぞれの道路での制御目標を実際に決定する。そして、当該決定された制御目標が同一であれば、同一の種類の車両制御を同一の制御目標で実行可能であると判定することができる。
【0068】
例えば、車両に備えられた変速機の変速比を予め決められたマップに基づいて特定し、特定された変速比となるように調整可能な車両においては、複数の道路のそれぞれにおいて車両制御を実行する際の制御目標を特定する構成を採用することが好ましい。すなわち、複数の変速段を有する有段のトルクコンバータを備えた変速部においては、曲率や道路勾配、エンジン回転数など、多数のパラメータに基づいてマップを参照することによって制御目標となる変速比が決定される。そこで、このような構成においては、車両前方の複数の道路のそれぞれについての要素同士を比較するのみで同一の制御目標であるか否かを即座に判定することは困難となる。そこで、制御部20が実際に複数の道路のそれぞれについて車両制御を行うと仮定した場合に必要な曲率等の要素を特定し、各要素とマップに基づいて変速比を特定すれば、複数の道路についての変速比同士を比較することにより、容易に同一の制御目標で車両制御を実行可能であるか否かを判定することができる。むろん、マップに基づいて変速比を決定する構成は一例であり、マップに基づいて変速比とスロットルバルブ開度との組み合わせを決定する構成や他の制御目標を決定する構成に本例を適用可能である。
【0069】
さらに、上述の図2に示す運転支援処理においては、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であるか否かを判定していたが、マップマッチング処理を行うことなく車両前方において車両制御を実行すべきか否かを判定する対象となる複数の道路を決定しても良い。例えば、制御部20が地図情報30aに基づいて車両前方の所定範囲に存在する道路を抽出し、抽出された複数の道路について同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する構成としても良い。
【0070】
この構成は、車両の走行道路の周辺に他の道路が存在しないが、走行道路の前方に複数の道路が存在する状態に適用することが好ましい。例えば、図4Bに示すように、車両の前方に分岐地点が存在し、分岐地点よりも前方に道路R1,R2が存在する場合、マップマッチング処理を行うと車両が走行している走行道路が確定されることになるものの、分岐地点以降の走行予定経路が確定されていない場合には道路R1,R2のいずれを走行するのか判定することは困難である。しかし、例えば、カーブ区間の減速制御においては、表1に示すように制御目標を規定する要素がカーブ区間の曲率とカーブ区間の開始位置とカーブ区間の終了位置とであるため、これらの要素は道路R1,R2で一致し得る。このため、制御目標を規定する要素が複数の道路R1,R2で一致している場合には、同一の種類の車両制御であるカーブ区間の減速制御を同一の制御目標で実行可能な状態となる。そこで、マップマッチング処理を行うことなく、車両前方において車両制御を実行すべきか否かを判定する対象となる複数の道路を決定する構成とすれば、分岐後の走行予定経路が特定されていない場合であっても運転支援を実施することが可能であり、運転支援の信頼性を高めることが可能である。
【0071】
さらに、図2に示す運転支援処理のステップS105においては、走行道路を確定できるか否かを判定すれば良く、マップマッチング処理における一致度以外の情報を利用して判定を行うことも可能である。例えば、制御部20は、GPS受信部41の出力情報に基づいて車両の現在位置が存在し得る範囲を誤差円として特定することが可能であり、当該誤差円内に車両の走行道路の候補が一個のみ存在する場合には、走行道路が確定できると判定しても良い。
【符号の説明】
【0072】
10…ナビゲーション装置、20…制御部、21…運転支援プログラム、21a…車両制御可否判定部、21b…車両制御部、30…記録媒体、30a…地図情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…制動部、45…スロットル制御部、46…フロントライト制御部、47…サスペンション制御部
【技術分野】
【0001】
本発明は、車両制御を実行することによって運転を支援する技術に関する。
【背景技術】
【0002】
従来、カーブ区間の曲率に適合した車速となるように車両の速度を制御するなどの自動制御技術が開発されている。自動制御を行う際には、道路の形状などに応じて制御目標を決定するため、車両が走行している道路を正確に特定できない場合には不適切な制御が実行され得る。そこで、例えば、特許文献1に開示された技術のように、車両が指定道路上に存在する確実度が低い場合に制御を中止する技術が開発されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−25538号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、車両が走行している道路を正確に特定できない場合に、自動制御を実行することができない。従って、車両制御が実行されるべきカーブ区間が前方に存在する2個の道路を比較した場合、双方の道路で同様の自動制御が行われることが期待される状況であるにもかかわらず、道路特定の確実性に応じて自動制御が実行される場合と実行されない場合とが発生し得る。このため、運転者はどのような状況で自動制御が実行されるのか予測することができず、運転者の信頼に足る運転支援を行うことができなかった。
本発明は、上記課題にかんがみてなされたもので、信頼性の高い運転支援を実行可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合に、当該複数の道路のうち、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を実行する。すなわち、車両前方に複数の道路が存在する場合に、車両においていずれの道路を走行する予定であるのか確定できない状況になり得る。しかし、車両においていずれの道路を走行する予定であるのか確定できない状況であったとしても、当該複数の道路のいずれにおいても同一の種類の車両制御を同一の制御目標で実行可能であれば、いずれの道路においても当該同一の種類の車両制御を実行することによる不都合は発生しない。そこで、複数の道路のいずれにおいても同一の種類の車両制御を同一の制御目標で実行可能な場合に、複数の道路のいずれに車両が到達した場合であっても当該同一の種類の車両制御を実行する。この結果、車両前方においていずれの道路を走行する予定であるのか確定できない状況においても運転支援を実施することが可能であり、運転支援の信頼性を高めることが可能である。
【0006】
ここで、車両制御可否判定手段は、車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができればよい。すなわち、車両前方の所定距離以内に存在する複数の道路を判定対象とすることにより、車両が所定距離走行するまでの間に到達する道路であって、車両制御による運転支援を行うべき道路が複数個存在し得る状況にて判定を行う。また、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することにより、いずれの道路において当該同一の種類の車両制御が実行されたとしても、不適切な車両制御を実行してしまうなどの不都合が発生しない状況であるか否かを判定することができればよい。
【0007】
車両前方の所定距離以内に存在する複数の道路は、現在以降に車両が走行する可能性のある複数の道路であれば良く、車両の位置を中心とし、所定距離を半径とした弧や半円の範囲内に存在する道路を検出する構成等によって判定対象となる複数の道路を特定すればよい。むろん、道路間で鉛直方向の高低差が生じている場合も考慮し、車両の位置を中心とし、所定距離を半径とした弧を車両前方に延びる軸周りに回転させた回転体や所定距離を半径とした半球の内部に存在する道路を検出する構成であっても良い。また、車両制御の種類は、車両制御の目的や制御対象によって区別可能であり、車両制御の目的や制御対象の全てあるいは一部が共通の制御を予め同一の種類として規定しても良いし、車両制御を実行するためのプログラムモジュールが共通である場合に同一の種類であるとみなしても良い。なお、車両制御の目的としては、車速の適正化や運転に必要な視野の照明、低燃費化、車両挙動の安定化など、各種の目的を想定し得る。また、制御対象としては、ブレーキ、変速機、サスペンション、ヘッドライトなどを想定し得る。
【0008】
さらに、車両制御の制御目標は、車両制御によって各制御対象にて達成すべき状態であり、最終的な目標であっても良いし、時系列的な目標であっても良い。前者の例としては、目標位置における目標車速を規定して減速制御する際の目標位置や目標車速が挙げられる。後者の例としては、目標位置における目標車速を規定して減速制御する際の現在位置から目標位置までの区間を走行する際の車速や加速度等が挙げられる。むろん、この場合、時間に対応付けて車速や加速度等が規定されても良いし、位置に対応付けて車速や加速度等が規定されても良い。
【0009】
車両制御手段は、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、複数の道路のうち、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を実行することができればよい。すなわち、車両においては走行道路を推定しながら走行しており、推定によって走行道路の候補となる道路は上述の複数の道路のいずれかであるため、当該複数の道路に向けて走行している過程や当該複数の道路のいずれかに到達した後に、当該同一の種類の車両制御を実行すればよい。車両制御の開始タイミングや制御内容は実行される車両制御に応じて適切に決定すればよい。制御目標は、上述の同一の制御目標であってもよいし、複数の道路のいずれにおいても不都合のない制御内容となる範囲で適宜制御目標を調整しても良い。
【0010】
さらに、複数の道路が類似している場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、車両制御の多くは、道路の形状や路面状態、道路上の地物(ペイント)などに基づく制御であるため、道路が類似している場合には実行すべき車両制御の種類および制御目標が同一であるとみなす。この構成によれば、簡易な判定処理によって同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができる。
【0011】
なお、複数の道路が類似しているか否かを判定する際には、複数の道路の形状や路面状態、地物の位置等を示す情報を取得して複数の道路が類似しているか否かを直接的に判定してもよいし、複数の道路が類似しているか否かを間接的に判定しても良い。後者としては、例えば、マップマッチング処理により、車両が走行している道路の候補が複数個特定され、複数の道路の候補のいずれが車両の走行道路であると確定することが困難である場合に当該複数の道路が類似しているとみなす構成等を採用可能である。
【0012】
すなわち、GPS受信部等によって特定された車両の軌跡と形状の一致度が高い道路上を走行しているとみなすマップマッチング処理を実行する場合、車両が走行中の道路の周辺に類似した形状の道路が存在すると、複数の道路が走行道路の候補となる。すなわち、マップマッチング処理において、通常は、道路の形状と車両の軌跡との一致度が最も高い道路が車両の走行道路であるとみなすが、複数の道路についての一致度に所定値以上の差がなければ当該複数の道路のいずれが走行道路であるのか正確に特定することは困難となる。この場合、走行道路の候補が複数となる。しかし、本発明においては、このような場合であっても従来の技術のように車両制御の実行を中止せず、いずれの道路で実行されたとしても不都合がない車両制御が実行されるため、従来実行されなかった車両制御が実行されることになり、運転支援の信頼性を高めることが可能である。
【0013】
さらに、複数の道路のそれぞれについて制御目標を規定する要素を比較し、要素同士の差が所定範囲内である場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、制御目標を規定する要素が類似していれば当該要素から規定される制御目標と当該要素に応じて実行すべき車両制御の種類が同一になるとみなす。この構成によれば、簡易な判定処理によって同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができる。
【0014】
なお、制御目標を規定する要素は、制御目標を特定するために参照されるパラメータであれば良く、例えば、道路の形状に対応した旋回方向や曲率、カーブ区間の開始位置等を示す情報や路面上の段差の大きさや位置、路面上の地物(停止線ペイント等)の位置等を示す情報によって当該要素を構成することが可能である。また、要素同士の差を評価するための所定範囲は、道路が類似しているか否かを判定するための基準となれば良く、要素が数値の場合には要素同士の数値の差が所定範囲内である場合に、同一の種類の車両制御を同一の制御目標で実行不可能になるほど要素同士に差異がないと判定できるように所定範囲を数値範囲として規定してあればよい。また、要素が数値以外の情報、例えば、旋回方向等の状態を示す情報である場合、要素が一致する場合に要素同士の差が所定範囲であり、要素が異なる場合に要素同士の差が所定範囲ではないと判定できるように所定範囲を定義する構成等を採用可能である。
【0015】
さらに、複数の種類の車両制御を実行可能な車両においては、複数の種類の前記車両制御のそれぞれについて制御目標を規定する要素が予め決められており、複数の道路において実行対象となる車両制御の種類に応じて要素を特定する構成とすることが好ましい。すなわち、異なる種類の車両制御においては異なる要素に基づいて制御目標が決定されるため、車両制御の種類に応じて要素を特定すれば、極めて容易に参照すべき要素を特定することが可能である。より具体的には、車両制御の種類毎に車両制御を実行するためのプログラムモジュールが異なる場合に、プログラムモジュールと要素とを対応付けておけば、実行対象のプログラムモジュールが起動された場合に、極めて容易に要素を抽出し、要素同士の差が所定範囲内であるか否かを判定することが可能になる。
【0016】
さらに、同一の種類の車両制御を複数の道路のそれぞれにおいて実行する場合の制御目標を特定し、特定された制御目標が同一である場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、複数の道路のそれぞれで実際に同一の車両制御を実行することを想定した場合に、それぞれの道路での制御目標を実際に決定する。そして、当該決定された制御目標が同一であれば、同一の種類の車両制御を同一の制御目標で実行可能であると判定することができる。
【0017】
さらに、本発明のように、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、車両の走行道路の候補となっている道路において同一の種類の車両制御を実行する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0018】
【図1】運転支援装置のブロック図である。
【図2】運転支援処理を示すフローチャートである。
【図3】車両制御の実行可否の判定を説明する図である。
【図4】車両制御の実行可否の判定を説明する図である。
【発明を実施するための形態】
【0019】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)運転支援処理:
(3)他の実施形態:
【0020】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる運転支援装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20と記録媒体30とを備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとしてナビゲーションプログラムを実施可能であり、当該ナビゲーションプログラムを構成するプログラムモジュールの一つとして運転支援プログラム21を備えている。
【0021】
記録媒体30には、予め地図情報30aが記録されている。地図情報30aは、車両の位置の特定等に利用される情報であり、車両が走行する道路上に設定されたノードの位置等を示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(停止線を示すペイントや建物等)の位置および種類等を示す地物データ,路面上に存在する段差の位置を示す段差データ等を含んでいる。なお、道路がカーブ区間である場合には形状補間点データがその道路に相当するリンクを示すリンクデータに対応付けられ、道路上に段差、停止線ペイントが存在する場合には段差データ、停止線ペイントを示す地物データがその道路に相当するリンクを示すリンクデータに対応付けられている。
【0022】
本実施形態における車両(ナビゲーション装置10が搭載された車両)は、運転支援プログラム21による機能を実現するためにGPS受信部41と車速センサ42とジャイロセンサ43と制動部44とスロットル制御部45とフロントライト制御部46とサスペンション制御部47とを備えており、これらの各部と制御部20とが協働することによって運転支援プログラム21による機能を実現する。
【0023】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の速度を取得する。ジャイロセンサ43は、車両の向きに対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43等は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。
【0024】
本実施形態においては、マップマッチング処理によって車両の現在位置を補正する構成を採用している。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいて特定される車両の走行軌跡と地図情報30aが示す道路の形状との一致度が最も高い道路を車両が走行している走行道路であるとみなして車両の現在位置を補正するマップマッチング処理を行う。なお、車両の走行軌跡と道路の形状との一致度を特定する際には、GPS受信部41の出力信号に基づいて特定される車両の現在位置から所定範囲内に存在する道路のそれぞれと走行軌跡とについての一致度を特定する。この結果、複数の道路について走行軌跡と形状との一致度が特定され、複数の道路の中から一致度が最も高い道路が車両の走行道路であるとみなされる。但し、制御部20は、一致度が最も高い道路についての一致度と他の道路についての一致度との差が所定値以上でなければこれらの道路のいずれが走行道路であるのか正確に特定することは困難とであるとみなす。この場合、走行道路の候補が複数であり、一致度が最も高い道路が走行道路であると予測された状態となる。
【0025】
制動部44は、車両の車輪に搭載されたブレーキによる減速の程度を調整するホイールシリンダの圧力を制御する装置を含み、制御部20は当該制動部44に対して制御信号を出力してホイールシリンダの圧力を調整させることが可能である。従って、制御部20が当該制動部44に対して制御信号を出力してホイールシリンダの圧力を増加させると、ブレーキによる制動力が増加し、車両が減速される。
【0026】
スロットル制御部45は、車両に搭載されたエンジンに供給する空気の量を調整するためのスロットルバルブを制御する装置を含み、制御部20は当該スロットル制御部45に対して制御信号を出力してスロットルバルブの開度を調整することが可能である。従って、制御部20が当該スロットル制御部45に対して制御信号を出力して吸気量を増減させると、エンジンの回転数が増減する。
【0027】
フロントライト制御部46は、車両の前方を照らすフロントライトの光軸方向を変更するため装置を含み、制御部20は当該フロントライト制御部46に対して制御信号を出力してフロントライトの光軸方向を調整することが可能である。従って、制御部20が当該フロントライト制御部46に対して制御信号を出力して光軸方向を変更すると、車両の前方においてフロントライトによって照らされる領域が変動する。
【0028】
サスペンション制御部47は、車両に搭載された防振機構であり、路面から車両に作用する外力の伝達特性(サスペンションのかたさ)を調整可能な機構を備えている。制御部20は、当該サスペンション制御部47に対して制御信号を出力して上述の伝達特性を調整することができる。従って、制御部20が当該サスペンション制御部47に対して制御信号を出力して外力の伝達特性を調整すると、段差の存在する路面やカーブ区間での走行安定性が変動する。
【0029】
制御部20は、ナビゲーションプログラムを実行することにより上述のマップマッチング処理を行って車両の現在位置を特定し、運転支援プログラム21は当該現在位置よりも前方の道路における運転を支援する処理を行う。当該運転支援を行うため、運転支援プログラム21は車両制御可否判定部21aと車両制御部21bとを備えている。
【0030】
車両制御可否判定部21aは、車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、マップマッチング処理によって特定された車両の現在位置を示す情報を取得し、地図情報30aを参照して当該現在位置よりも前方の所定範囲(車両の前方方向から±90°かつ車両から所定距離の範囲)に制御対象となる複数の道路が存在するか否かを判定する。本実施形態においては、カーブ区間と路面上の段差と停止線ペイントとに応じた車両制御を行う構成が採用されている。そこで、制御部20は、地図情報30aを参照し、現在位置よりも前方の所定範囲の領域に存在する複数の道路を示すリンクデータに対して、カーブ区間の形状(カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置)を示す情報が対応付けられている場合に、カーブ区間に関する車両制御の制御対象となる複数の道路が存在すると判定する。
【0031】
また、制御部20は、地図情報30aを参照し、現在位置よりも前方の所定範囲の領域に存在する複数の道路を示すリンクデータに対して、段差の位置を示す情報が対応付けられている場合に、段差位置に関する車両制御の制御対象となる複数の道路が存在すると判定する。さらに、制御部20は、地図情報30aを参照し、現在位置よりも前方の所定範囲の領域に存在する複数の道路を示すリンクデータに対して、停止線ペイントの位置を示す情報が対応付けられている場合に、停止線ペイントに関する車両制御の制御対象となる複数の道路が存在すると判定する。なお、カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置は形状補間点データに基づいて特定される。すなわち、形状補間点データに基づいて特定される隣接する形状補間点同士の位置関係から旋回方向が特定され、形状補間点の中の少なくとも3点の位置からカーブ区間の曲率が特定され、形状補間点列の端点の一方からカーブ区間の開始位置が特定され、形状補間点列の端点の他方からカーブ区間の終了位置が特定される。
【0032】
さらに、本実施形態においては、車両制御の種類毎に制御目標を規定する要素が予め決められており、カーブ区間に関する車両制御については、カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報が制御目標を規定する要素になっている。また、段差位置に関する車両制御については、段差の位置を示す情報が制御目標を規定する要素になっている。さらに、停止線ペイントに関する車両制御については、停止線ペイントの位置を示す情報が制御目標を規定する要素になっている。そこで、制御部20は、カーブ区間において実施され得る車両制御の種類毎に要素を選択し、要素同士の差が所定範囲内である車両制御の種類に関しては、複数の道路において同一の制御目標で実行可能であると判定する。
【0033】
車両制御部21bは、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、複数の道路のうち、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を実行する機能を制御部20に実現させるモジュールである。すなわち、車両制御可否判定部21aによって、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であると判定された場合、当該複数の道路のいずれにおいて当該同一の種類の車両制御を実行しても車両に不都合を生じさせることなく運転支援を行うことができる。そこで、制御部20は、実行可能であると判定された種類の車両制御を、マップマッチング処理によって走行道路として推定された道路の候補において実行する。
【0034】
なお、本実施形態において、制御部20は、当該車両制御を実行する場合の制御目標を、複数の道路において実行可能であると判定された上述の同一の制御目標とする。すなわち、本実施形態において制御目標を規定する要素は、上述のように、カーブ区間の旋回方向、カーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報と、段差の位置を示す情報と、停止線ペイントの位置を示す情報とであるため、車両の走行道路として推定された道路に関してのこれらの情報に基づいて当該走行道路で実施すべき制御目標を特定し、車両制御を実行する。車両制御は、制御部20が、制動部44,スロットル制御部45,フロントライト制御部46,サスペンション制御部47のいずれかまたは組み合わせに対して制御信号を出力することによって実行される。当該車両制御の詳細は後述する。
【0035】
以上の構成においては、車両前方においていずれの道路を走行する予定であるのか確定できない状況においても運転支援を実施することが可能であり、運転支援の信頼性を高めることが可能である。すなわち、上述のマップマッチング処理において、走行道路の候補が複数であって走行軌跡との一致度が最も高い道路と他の道路についての一致度との差が所定値よりも小さい場合、一致度が最も高い道路が走行道路であると予測された状態である。この場合、車両においていずれの道路を走行する予定であるのか確定できないため、従来は制御を行わない構成としたが、本実施形態においては、複数の道路のいずれにおいても同一の種類の車両制御を同一の制御目標で実行可能である場合に車両制御を行う構成としているため、不適切な制御が実行されることなく車両制御を行って運転支援を行うことが可能である。
【0036】
(2)運転支援処理:
次に、以上の構成においてナビゲーション装置10が実施する運転支援処理を説明する。図2は、運転支援プログラム21による運転支援処理を示すフローチャートであり、当該運転支援処理は所定の期間(例えば、100ms)毎に実行される。また、表1は、本実施形態にて実行可能な車両制御の種類と各種類の車両制御の制御目標を決める要素が車両制御の種類毎に示されている。表1に示すように、本実施形態においては、カーブ区間を目標車速で定速走行するためにカーブ区間の開始位置における車速を目標車速とする減速制御(カーブ区間の減速制御)と、カーブ区間の旋回方向に応じてフロントライトの光軸方向を制御する車両制御(フロントライト光軸制御)と、カーブ区間の旋回方向および曲率に応じてサスペンションの減衰特性を制御することによって走行安定性を向上させる車両制御(カーブ区間のサスペンション制御)と、路面上の段差位置に応じてサスペンションの減衰特性を制御することによって走行安定性を向上させる車両制御(段差位置のサスペンション制御)と、路面上の停止線ペイント付近において停止線以前に停止するための減速制御(一時停止支援)とを実行可能である。また、表1においては、カーブ区間の旋回方向と、カーブ区間の曲率と、カーブ区間の開始位置と終了位置と、段差の位置と停止線ペイントの位置とが車両制御の要素となり得ることを示し、丸が車両制御の要素であることを示し、×は車両制御の要素ではないことを示している。
【表1】
【0037】
図2に示す運転支援処理において、制御部20は、車両制御可否判定部21aの処理により、車両前方に制御対象となる道路が存在するか否かを判定する(ステップS100)。すなわち、運転支援処理において、制御部20は、まず、本実施形態における車両制御の対象となる道路が車両前方に存在し、車両制御の実行の可否を判定すべき状況であるか否かを判定することとしている。具体的には、制御部20は、地図情報30aを参照し、車両の現在位置の前方方向から±90°の範囲の道路を検索対象として、カーブ区間であることを示す形状補間点データを検索し、当該形状補間点データが検索された場合には、車両前方に制御対象となるカーブ区間が存在すると判定する。また、同様の道路を検索対象として段差データを検索し、段差データが存在する場合には、車両前方に制御対象となる段差が存在すると判定する。さらに、同様の道路を検索対象として停止線ペイントを示す地物データを検索し、停止線ペイントを示す地物データが存在する場合には、車両前方に制御対象となる停止線が存在すると判定する。
【0038】
ステップS100にて、車両前方に制御対象となる道路が存在すると判定されない場合、制御部20は、図2に示す運転支援処理を終了する。一方、ステップS100にて、車両前方に制御対象となる道路が存在すると判定された場合、制御部20は、車両制御可否判定部21aの処理により、マップマッチング処理によって特定された車両前方の所定範囲に存在する複数の道路についての一致度を取得し、一致度が最も高い道路についての一致度と他の道路についての一致度との差分が所定値以上であるか否かを判定する(ステップS105)。ステップS105において、一致度の差分が所定値以上であると判定された場合、一致度が最も高い道路が走行道路であるとみなすことができる(走行道路を確定することができる)ため、制御部20は、車両制御部21bの処理により、当該一致度が最も高い道路を車両制御の実行対象としてステップS130の処理を実行する。なお、一致度の判定対象となる道路が複数でなく一個のみである場合にも走行道路を確定することができるため、ステップS105において一致度の差分は所定値以上であるとみなす。
【0039】
一方、ステップS105にて、一致度の差分が所定値以上であると判定されない場合、一致度が最も高い道路が車両の走行道路であると推定された状態となるが、一致度の差分が所定値より小さく、実際には車両が走行している可能性がある他の道路が複数存在することになる(ここで、当該他の道路と一致度が最も高い道路とをマッチング候補道路と呼ぶ)。そこで、制御部20は、ステップS110〜S125において、一致度が最も高い道路において実行すべき車両制御を他のマッチング候補道路において実行した場合に不適切な制御となるか否かを判定する。
【0040】
このためにまず制御部20は、車両制御可否判定部21aの処理により、マッチング候補道路の前方の道路の情報を取得する(ステップS110)。すなわち、本実施形態において制御対象となる道路は、カーブ区間と路面上に段差が存在する道路と路面上に停止線ペイントが存在する道路である。そこで、制御部20は、各マッチング候補道路について車両前方の所定範囲に含まれるリンクを判定対象リンクとして特定し、地図情報30aを参照して判定対象リンクを示すリンクデータに対応づけられた情報(形状補間点データ、段差データ、停止線ペイントを示す地物データ)を取得する。
【0041】
次に、制御部20は、車両制御可否判定部21aの処理により、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であるか否かを判定する(ステップS115)。すなわち、制御部20は、ステップS110にて取得された前方の道路の情報が複数のマッチング候補道路で共通する場合には、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であると判定する。
【0042】
具体的には、複数のマッチング候補道路の前方の複数の道路についての判定対象リンクに対してカーブ区間であることを示す形状補間点データが対応付けられている場合には、複数のマッチング候補道路の前方の道路にて同一の車両制御であるカーブ区間に関する車両制御(カーブ区間の減速制御、フロントライト光軸制御、カーブ区間のサスペンション制御)を実行すべきであると判定される。また、複数のマッチング候補道路の前方の複数の複数の道路についての判定対象リンクに対して段差データが対応付けられている場合には、複数のマッチング候補道路の前方の道路にて同一の車両制御である段差位置のサスペンション制御を実行すべきであると判定される。さらに、複数のマッチング候補道路の前方の複数の道路についての判定対象リンクに対して停止線ペイントを示す地物データが対応付けられている場合には、複数のマッチング候補道路の前方の道路にて同一の車両制御である一時停止支援を実行すべきであると判定される。
【0043】
ステップS115にて、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であると判定されない場合、制御部20は、図2に示す処理を終了する。一方、ステップS115にて、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であると判定された場合、制御部20は、車両制御可否判定部21aの処理により、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御に関して、当該同一の種類の車両制御の制御目標を規定する要素を取得する(ステップS120)。すなわち、制御部20は、表1に示すような車両制御の種類と要素との関係を示すマップを参照し、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御に対応した要素を特定する。また、制御部20は、地図情報30aを参照し、特定された要素を示す情報を取得する。例えば、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がカーブ区間の減速制御である場合、制御部20は、表1に基づいて制御目標を規定する要素がカーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置であることを特定し、地図情報30aからカーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報を取得する。
【0044】
次に、制御部20は、車両制御可否判定部21aの処理により、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する(ステップS125)。すなわち、制御部20は、ステップS120にて取得した複数のマッチング候補道路の前方の道路に関する要素を比較し、要素同士の差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。なお、本実施形態においては、要素が数値の場合には数値範囲によって要素同士の差が所定範囲であるか否か判定され、要素が旋回方向を示す情報である場合要素が一致する場合に要素同士の差が所定範囲内であると判定される。
【0045】
例えば、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がカーブ区間の減速制御である場合、制御部20は、複数の道路についてのカーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とを特定し、各差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態におけるカーブ区間の減速制御では、カーブ区間の曲率に応じた目標車速となるまで車速を減速させるための加速度が特定されるとともに、車両の現在位置からカーブ区間の開始位置までの区間を当該加速度で走行し、カーブ区間の開始位置からカーブ区間の終了位置までの区間において定速走行するように車両が制御される。そこで、本実施形態においては、表1に示される要素であるのカーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とが所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標でカーブ区間の減速制御が実行可能であると判定される構成を採用している。
【0046】
図3Aは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1,R2の前方の道路が左に旋回している例を示している。図3Bは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1の前方の道路が左、マッチング候補道路R2の前方の道路が右に旋回している例を示している。さらに、図3A,3Bに示す例において、マッチング候補道路R1,R2の前方の道路におけるカーブ区間の曲率の差とカーブ区間の開始位置の差とカーブ区間の終了位置の差が所定範囲内であるとする。この場合、図3A,3Bに示す例のいずれにおいても、表1に示される要素であるカーブ区間の曲率の差とカーブ区間の開始位置の差とカーブ区間の終了位置の差の全てが所定範囲内であるため、図3A,3Bに示す例におけるマッチング候補道路R1,R2の前方の道路にて同一の制御目標でカーブ区間の減速制御を行ったとしても不適切な制御にはならない。従って、図3A,3Bに示す例においては、マッチング候補道路R1,R2の前方の道路において同一の制御目標でカーブ区間の減速制御が実行可能であると判定される。
【0047】
一方、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がフロントライト光軸制御である場合、制御部20は、複数の道路についてのカーブ区間の旋回方向の差とカーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とを特定し、各差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態におけるフロントライト光軸制御では、カーブ区間の開始位置からカーブ区間の終了位置までの区間において、カーブ区間の旋回方向および曲率に応じて路面を効率的に照らすようにフロントライトの光軸方向が制御される。そこで、本実施形態においては、表1に示される要素であるのカーブ区間の旋回方向の差と、カーブ区間の曲率の差と、カーブ区間の開始位置の差とカーブ区間の終了位置の差とが所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標でカーブ区間の減速制御が実行可能であると判定される構成を採用している。
【0048】
図3A,3Bに示す例において、マッチング候補道路R1,R2の前方の道路におけるカーブ区間の曲率の差とカーブ区間の開始位置の差とカーブ区間の終了位置の差が所定範囲内であるが、図3Aにおいては旋回方向が一致し、図3Bにおいては旋回方向が異なる。従って、図3Aに示すマッチング候補道路R1,R2の前方の道路におけるカーブ区間の旋回方向の差は所定範囲内であり、図3Bに示すマッチング候補道路R1,R2の前方の道路におけるカーブ区間の旋回方向の差は所定範囲内ではないと判定される。この結果、図3Aに示す例においてはマッチング候補道路R1,R2の前方の道路において同一の制御目標でフロントライト光軸制御が実行可能であると判定される。一方、図3Bに示す例においてはマッチング候補道路R1,R2の前方の道路において同一の制御目標でフロントライト光軸制御が実行可能であると判定されない。
【0049】
複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御がカーブ区間のサスペンション制御である場合、表1に示すように制御目標を規定する要素がフロントライト光軸制御と共通である。同一の制御目標でカーブ区間のサスペンション制御を実行可能であるか否かの判定の結果は、フロントライト光軸制御における判定の結果と同一である。
【0050】
さらに、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御が段差位置のサスペンション制御である場合、制御部20は、複数の道路についての段差位置の差(段差位置と車両との距離の差)を特定し、当該差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態において段差位置に応じたサスペンションの減衰力の制御は、段差の前後の所定範囲(段差S1に関して範囲D1、段差S2に関して範囲D2)で実行される。そこで、本実施形態においては、表1に示される要素である段差位置の差が所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標で段差位置のサスペンション制御が実行可能であると判定される構成を採用している。
【0051】
図3Cは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1,R2の前方の道路に段差S1,S2が存在する例を示している。また、図3Cにおいては、サスペンションの減衰力の制御範囲であるD1,D2は重複し、いずれの範囲でサスペンションの減衰力を制御したとしても適切な制御が行われる例を示している。従って、図3Cに示す例においては、段差位置の差が所定範囲内であると判定され、マッチング候補道路R1,R2の前方の道路において同一の制御目標で段差位置のサスペンション制御が実行可能であると判定される。なお、本実施形態においては段差位置のサスペンション制御の制御目標を規定する要素として段差位置が例示されているが、むろん制御目標を規定する要素に段差の大きさを加えても良い。
【0052】
さらに、複数のマッチング候補道路の前方の道路で実行すべき同一の種類の車両制御が一時停止支援である場合、制御部20は、複数の道路についての停止線ペイントの位置の差(停止線ペイントの位置と車両との距離の差)を特定し、当該差が所定範囲内である場合に同一の制御目標を実行可能であると判定する。すなわち、本実施形態において停止線ペイントの位置に応じた一時停止支援は、停止線ペイントの位置に車両を停止させる減速制御であり、車両の現在位置から停止線ペイントの位置までの距離に応じて車両の加速度が特定され、当該加速度で車両を走行させる車両制御が実行される。そこで、本実施形態においては、表1に示される要素である停止線ペイントの位置の差が所定範囲内である場合に、マッチング候補道路R1,R2の前方の道路において同一の制御目標で一時停止支援が実行可能であると判定される構成を採用している。
【0053】
図4Aは車両が走行する道路R1と並走する道路R2との双方がマッチング候補道路となり、マッチング候補道路R1,R2の前方の道路に停止線ペイントP1,P2が存在する例を示している。また、図4Aに示す例において、停止線ペイントP1,P2は近い位置に存在し、いずれの停止線ペイントP1,P2を目標とした減速制御を行ったとしても適切な制御が行われる。従って、図4Aに示す例においては、停止線ペイントの位置の差が所定範囲内であると判定され、マッチング候補道路R1,R2の前方の道路において同一の制御目標で一時停止支援が実行可能であると判定される。
【0054】
ステップS125にて同一の種類の車両制御を同一の制御目標の車両制御を実行可能であると判定されない場合、車両制御を実行すると不適切な車両制御となる可能性があるとみなし、図2に示す処理を終了する。一方、ステップS125にて同一の種類の車両制御を同一の制御目標の車両制御を実行可能であると判定された場合、制御部20は、車両制御部21bの処理により、実行対象の車両制御を実行する(ステップS130)。すなわち、ステップS125の判定を経てステップS130を実行する場合、制御部20は、ステップS125で実行可能とされた種類の車両制御を実行対象の車両制御とする。また、ステップS105の判定を経てステップS130を実行する場合、制御部20は、上述の一致度が最も高い道路にて実行すべき車両制御を実行対象の車両制御とする。
【0055】
なお、各種類の車両制御が実行対象となった場合の制御は以下の通りに実行される。例えば、実行対象の車両制御がカーブ区間の減速制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関するカーブ区間の曲率、カーブ区間の開始位置、カーブ区間の終了位置を示す情報に基づいて現在位置における現在車速をカーブ区間の開始位置にて目標車速となるように減速させるための加速度を特定する。そして、制御部20は、車両の現在位置からカーブ区間の開始位置までの区間を当該加速度で走行し、カーブ区間の開始位置からカーブ区間の終了位置までの区間において定速走行することを制御目標とし、車両の現在位置からカーブ区間の開始位置までの区間にて上述の加速度が車両に作用した状態となり、カーブ区間の開始位置からカーブ区間の終了位置までの区間にて定速で車両が走行するように制動部44,スロットル制御部45に制御信号を出力する。この結果、車両の現在位置からカーブ区間の開始位置までの区間において、当該加速度が車両に作用するように制動力、スロットルバルブの開度が制御される。
【0056】
また、実行対象の車両制御がフロントライト光軸制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関するカーブ区間の旋回方向および曲率に基づいてカーブ区間の路面を効果的に照らすためのフロントライトの光軸方向を特定する。そして、制御部20は、カーブ区間の開始位置からカーブ区間の終了位置までの区間にて当該特定された光軸方向にフロントライトの光軸方向を向けることを制御目標とし、フロントライト制御部46に対して制御信号を出力してカーブ区間の開始位置からカーブ区間の終了位置までの区間におけるフロントライトの光軸が上述の制御目標に一致するように制御する。
【0057】
さらに、実行対象の車両制御がカーブ区間のサスペンション制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関するカーブ区間の旋回方向および曲率に基づいて走行安定性を向上させるためのサスペンションの減衰特性を特定する。本実施形態においては、曲率が大きいほど減衰力を大きく(サスペンションをかたく)するように設定される。従って、制御部20は、カーブ区間の曲率に対応する基準の減衰力を特定するとともに、カーブ区間の旋回方向に応じて左右の車輪と曲率中心との位置関係を特定し、曲率中心に近い車輪の方が遠い車輪よりも減衰力が大きくなるように基準の減衰力を補正して左右の減衰力を特定する。そして、制御部20は、カーブ区間の開始位置からカーブ区間の終了位置までの区間にてサスペンションを当該特定された減衰力にすることを制御目標とし、サスペンション制御部47に対して制御信号を出力してカーブ区間の開始位置からカーブ区間の終了位置までの区間におけるサスペンションの減衰力が上述の制御目標に一致するように制御する。
【0058】
さらに、実行対象の車両制御が段差位置のサスペンション制御の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関する段差の位置に基づいて走行安定性を向上させるためのサスペンションの減衰特性を特定する。そして、制御部20は、段差の位置の前後に所定距離の範囲の区間にてサスペンションを当該特定された減衰力にすることを制御目標とし、サスペンション制御部47に対して制御信号を出力して段差の位置の前後に所定距離の範囲の区間におけるサスペンションの減衰力が上述の制御目標に一致するように制御する。
【0059】
さらに、実行対象の車両制御が一時停止支援の場合、制御部20は、複数のマッチング候補のうち、一致度が最も高い道路の前方の道路に関する停止線ペイントの位置を示す情報に基づいて現在位置における現在車速を停止線の位置にて0km/hとなるように減速させるための加速度を特定する。そして、制御部20は、車両の現在位置から停止線の位置までの区間を当該加速度で走行することを制御目標とし、車両の現在位置から停止線の位置までの区間にて上述の加速度が車両に作用した状態となるように制動部44,スロットル制御部45に制御信号を出力する。この結果、車両の現在位置から停止線の位置までの区間において、当該加速度が車両に作用するように制動力、スロットルバルブの開度が制御され、停止線の位置で車両が停止される。
【0060】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能である場合、車両の走行道路の候補となっている道路において同一の種類の車両制御を実行する限りにおいて、他にも種々の実施形態を採用可能である。例えば、車両前方の複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する対象となる道路は、現在以降に車両が走行する可能性のある複数の道路であれば良く、車両の位置を中心とし、所定距離を半径とした弧やの範囲内に存在する道路を対象としても良い。むろん、道路間で鉛直方向の高低差が生じている場合も考慮し、車両の位置を中心とし、所定距離を半径とした弧を車両前方に延びる軸周りに回転させた回転体や所定距離を半径とした半球の内部に存在する道路を検出する構成であっても良い。
【0061】
さらに、車両制御の種類は、上述の種類に限定されず、種類の区分法も上述の例に限定されない。すなわち、車両制御の種類は車両制御の目的や制御対象によって区別可能であり、車両制御の目的や制御対象の全てあるいは一部が共通の制御を予め同一の種類として規定しても良いし、車両制御を実行するためのプログラムモジュールが共通である場合に同一の種類であるとみなしても良い。
【0062】
さらに、車両制御の制御目標は、車両制御によって各制御対象にて達成すべき状態であり、最終的な目標であっても良いし、時系列的な目標であっても良い。前者の例としては、目標位置における目標車速を規定して減速制御する際の目標位置や目標車速が挙げられる。後者の例としては、目標位置における目標車速を規定して減速制御する際の現在位置から目標位置までの区間を走行する際の車速や加速度等が挙げられる。むろん、この場合、時間に対応付けて車速や加速度等が規定されても良いし、位置に対応付けて車速や加速度等が規定されても良い。
【0063】
さらに、上述の実施形態においては、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であると判定された場合に、車両の走行道路の候補となっている道路において当該同一の種類の車両制御を同一の制御目標で実行する構成であったが、制御目標は当該同一の制御目標でなくても良い。すなわち、車両制御が実行可能であるか否かを判定する際の指標となる「同一の制御目標」と実際に車両制御が実行される際の「制御目標」が異なっていても良い。例えば、複数の道路のいずれにおいても不都合のない制御内容となる範囲で減速力を抑制するなど適宜制御目標を調整しても良い。
【0064】
さらに、車両制御可否判定部21aにおける、複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるとの判定は、当該判定に応じて当該同一の種類の車両制御が実行された場合に不適切な車両制御とならないような判定であればよい。従って、上述のような制御目標を規定するための要素を比較する構成の他にも種々の手法によって判定を行うことができる。例えば、車両前方の複数の道路が類似している場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、車両制御の多くは、道路の形状や路面状態、道路上の地物(ペイント)などに基づく制御であるため、道路が類似している場合には実行すべき車両制御の種類および制御目標が同一であるとみなす。この構成によれば、簡易な判定処理によって同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定することができる。
【0065】
なお、複数の道路が類似しているか否かを判定する際には、複数の道路の形状や路面状態、地物の位置等を示す情報を取得して複数の道路が類似しているか否かを直接的に判定してもよいし、複数の道路が類似しているか否かを間接的に判定しても良い。後者としては、例えば、マップマッチング処理により、車両が走行している道路の候補が複数個特定され、複数の道路の候補のいずれが車両の走行道路であると確定することが困難である場合に当該複数の道路が類似しているとみなす構成等を採用可能である。
【0066】
さらに、上述の実施形態おいては、車両制御に対応する要素を選択し、要素同士の差に基づいて同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する構成であったが、他の手法によって要素を選択する構成としても良い。例えば、車両制御の種類毎に車両制御を実行するためのプログラムモジュールが異なる場合に、プログラムモジュールと要素とを対応付けておけば、実行対象のプログラムモジュールが起動された場合に、極めて容易に要素を抽出し、要素同士の差が所定範囲内であるか否かを判定することが可能になる。
【0067】
要素同士の差を比較する構成ではなく、同一の種類の車両制御を複数の道路のそれぞれにおいて実行する場合の制御目標を特定し、特定された制御目標が同一である場合に同一の種類の車両制御を同一の制御目標で実行可能であると判定する構成を採用しても良い。すなわち、複数の道路のそれぞれで実際に同一の車両制御を実行することを想定した場合に、それぞれの道路での制御目標を実際に決定する。そして、当該決定された制御目標が同一であれば、同一の種類の車両制御を同一の制御目標で実行可能であると判定することができる。
【0068】
例えば、車両に備えられた変速機の変速比を予め決められたマップに基づいて特定し、特定された変速比となるように調整可能な車両においては、複数の道路のそれぞれにおいて車両制御を実行する際の制御目標を特定する構成を採用することが好ましい。すなわち、複数の変速段を有する有段のトルクコンバータを備えた変速部においては、曲率や道路勾配、エンジン回転数など、多数のパラメータに基づいてマップを参照することによって制御目標となる変速比が決定される。そこで、このような構成においては、車両前方の複数の道路のそれぞれについての要素同士を比較するのみで同一の制御目標であるか否かを即座に判定することは困難となる。そこで、制御部20が実際に複数の道路のそれぞれについて車両制御を行うと仮定した場合に必要な曲率等の要素を特定し、各要素とマップに基づいて変速比を特定すれば、複数の道路についての変速比同士を比較することにより、容易に同一の制御目標で車両制御を実行可能であるか否かを判定することができる。むろん、マップに基づいて変速比を決定する構成は一例であり、マップに基づいて変速比とスロットルバルブ開度との組み合わせを決定する構成や他の制御目標を決定する構成に本例を適用可能である。
【0069】
さらに、上述の図2に示す運転支援処理においては、複数のマッチング候補道路の前方の道路で実行すべき車両制御の種類が同一であるか否かを判定していたが、マップマッチング処理を行うことなく車両前方において車両制御を実行すべきか否かを判定する対象となる複数の道路を決定しても良い。例えば、制御部20が地図情報30aに基づいて車両前方の所定範囲に存在する道路を抽出し、抽出された複数の道路について同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する構成としても良い。
【0070】
この構成は、車両の走行道路の周辺に他の道路が存在しないが、走行道路の前方に複数の道路が存在する状態に適用することが好ましい。例えば、図4Bに示すように、車両の前方に分岐地点が存在し、分岐地点よりも前方に道路R1,R2が存在する場合、マップマッチング処理を行うと車両が走行している走行道路が確定されることになるものの、分岐地点以降の走行予定経路が確定されていない場合には道路R1,R2のいずれを走行するのか判定することは困難である。しかし、例えば、カーブ区間の減速制御においては、表1に示すように制御目標を規定する要素がカーブ区間の曲率とカーブ区間の開始位置とカーブ区間の終了位置とであるため、これらの要素は道路R1,R2で一致し得る。このため、制御目標を規定する要素が複数の道路R1,R2で一致している場合には、同一の種類の車両制御であるカーブ区間の減速制御を同一の制御目標で実行可能な状態となる。そこで、マップマッチング処理を行うことなく、車両前方において車両制御を実行すべきか否かを判定する対象となる複数の道路を決定する構成とすれば、分岐後の走行予定経路が特定されていない場合であっても運転支援を実施することが可能であり、運転支援の信頼性を高めることが可能である。
【0071】
さらに、図2に示す運転支援処理のステップS105においては、走行道路を確定できるか否かを判定すれば良く、マップマッチング処理における一致度以外の情報を利用して判定を行うことも可能である。例えば、制御部20は、GPS受信部41の出力情報に基づいて車両の現在位置が存在し得る範囲を誤差円として特定することが可能であり、当該誤差円内に車両の走行道路の候補が一個のみ存在する場合には、走行道路が確定できると判定しても良い。
【符号の説明】
【0072】
10…ナビゲーション装置、20…制御部、21…運転支援プログラム、21a…車両制御可否判定部、21b…車両制御部、30…記録媒体、30a…地図情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…制動部、45…スロットル制御部、46…フロントライト制御部、47…サスペンション制御部
【特許請求の範囲】
【請求項1】
車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する車両制御可否判定手段と、
前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する車両制御手段と、
を備える運転支援装置。
【請求項2】
前記車両制御可否判定手段は、前記複数の道路が類似している場合に前記同一の種類の車両制御を前記同一の制御目標で実行可能であると判定する、
請求項1に記載の運転支援装置。
【請求項3】
前記車両制御可否判定手段は、前記複数の道路のそれぞれについて制御目標を規定する要素を比較し、前記要素同士の差が所定範囲内である場合に前記同一の種類の車両制御を前記同一の制御目標で実行可能であると判定する、
請求項1に記載の運転支援装置。
【請求項4】
前記要素は、複数の種類の車両制御のそれぞれについて予め決められており、
前記車両制御可否判定手段は、前記複数の道路において実行対象となる車両制御の種類に応じて前記要素を特定する、
請求項3に記載の運転支援装置。
【請求項5】
前記車両制御可否判定手段は、前記同一の種類の車両制御を前記複数の道路のそれぞれにおいて実行する場合の制御目標を特定し、特定された制御目標が同一である場合に前記同一の種類の車両制御を前記同一の制御目標で実行可能であると判定する、
請求項1に記載の運転支援装置。
【請求項6】
車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する車両制御可否判定工程と、
前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する車両制御工程と、
を含む運転支援方法。
【請求項7】
車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する車両制御可否判定機能と、
前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する車両制御機能と、
をコンピュータに実現させる運転支援プログラム。
【請求項1】
車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する車両制御可否判定手段と、
前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する車両制御手段と、
を備える運転支援装置。
【請求項2】
前記車両制御可否判定手段は、前記複数の道路が類似している場合に前記同一の種類の車両制御を前記同一の制御目標で実行可能であると判定する、
請求項1に記載の運転支援装置。
【請求項3】
前記車両制御可否判定手段は、前記複数の道路のそれぞれについて制御目標を規定する要素を比較し、前記要素同士の差が所定範囲内である場合に前記同一の種類の車両制御を前記同一の制御目標で実行可能であると判定する、
請求項1に記載の運転支援装置。
【請求項4】
前記要素は、複数の種類の車両制御のそれぞれについて予め決められており、
前記車両制御可否判定手段は、前記複数の道路において実行対象となる車両制御の種類に応じて前記要素を特定する、
請求項3に記載の運転支援装置。
【請求項5】
前記車両制御可否判定手段は、前記同一の種類の車両制御を前記複数の道路のそれぞれにおいて実行する場合の制御目標を特定し、特定された制御目標が同一である場合に前記同一の種類の車両制御を前記同一の制御目標で実行可能であると判定する、
請求項1に記載の運転支援装置。
【請求項6】
車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する車両制御可否判定工程と、
前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する車両制御工程と、
を含む運転支援方法。
【請求項7】
車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定する車両制御可否判定機能と、
前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する車両制御機能と、
をコンピュータに実現させる運転支援プログラム。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−98997(P2012−98997A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−247447(P2010−247447)
【出願日】平成22年11月4日(2010.11.4)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月4日(2010.11.4)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]