
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】制限エリアに基づいて適切な状況下で車載通信装置の通話を支援することを可能とした運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】自車の走行予定経路を取得し(S2)、走行予定経路上にあるハンズフリー通信を制限すべき制限エリアを特定し(S3)、自車の現在位置と制限エリアとの位置関係を取得し(S5)、車載ハンズフリーシステムにおける通話状態を取得し(S6)、着信に対するユーザ応答態様を取得し(S7)、取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2を制御を行う(S8)ように構成する。
【解決手段】自車の走行予定経路を取得し(S2)、走行予定経路上にあるハンズフリー通信を制限すべき制限エリアを特定し(S3)、自車の現在位置と制限エリアとの位置関係を取得し(S5)、車載ハンズフリーシステムにおける通話状態を取得し(S6)、着信に対するユーザ応答態様を取得し(S7)、取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2を制御を行う(S8)ように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通話機能を備えた車載通信装置が搭載された車両において車載通信装置による通話に対する支援を行う運転支援装置、運転支援方法及びコンピュータプログラムに関する。
【背景技術】
【0002】
近年、携帯電話機が広く普及している。そして、携帯電話機は自動車等の車両内においても使用可能であるが、車両走行中における携帯電話機の操作は安全性の面から禁止されている。そこで、近年では車両走行中に携帯電話機による通話を行う場合には、車両の運転操作に大きな支障を与えないように、携帯電話機を持たずに操作・通話が可能となるハンズフリー通話が行われている。このハンズフリー通話は、携帯電話機をハンズフリーユニットを内蔵したナビゲーション装置や専用のハンズフリーユニットと接続することにより実現可能となる。
【0003】
しかしながら、ハンズフリー通話により通話を行う場合であっても、通話中においては運転者の運転に対する集中力が少なからず低下する。ここで、例えば特開2002−64652号公報には、携帯電話機が予め設定された使用禁止エリアに位置する場合にその携帯電話機の接続要求を規制することや、通信先の携帯電話機が使用禁止エリアに位置する場合に携帯電話機の発信動作を停止させる技術について記載されている。
【特許文献1】特開2002−64852号公報(第6〜7頁、図5〜図8)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載された技術では、携帯電話機が予め設定された使用禁止エリアに位置する場合にその携帯電話機の接続要求を規制することや、通信先の携帯電話機が使用禁止エリアに位置する場合に携帯電話機の発信動作を停止させることは記載されているが、携帯電話機の通話状態に応じて携帯電話機の制御を行うことは記載されていない。
【0005】
ここで、特に車両に搭載された通信装置は、通常の携帯電話機や固定電話と異なり、一定のエリア内に留まった状態で使用されることは少なく、一定以上の速度で移動しながら使用されることが多い。従って、例えば外部通信装置と通話した状態や外部通信装置から着信がある状態で使用禁止エリアに進入する場合がある。このような場合において、従来の上記特許文献1に記載された技術では、適切な支援を行うことができなかった。
【0006】
本発明は前記従来における問題点を解消するためになされたものであり、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することを可能とした運転支援装置、運転支援方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するため本願の請求項1に係る運転支援装置(1)は、外部通信装置との通話機能を備えた車載通信装置(1、2)の通信機能を制限すべき制限エリアを特定する制限エリア特定手段(13)と、前記車両の現在位置を取得する車両位置取得手段(13)と、前記車載通信装置の通話状態を取得する通話状態取得手段(13)と、前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援手段(13)と、を有することを特徴とする。
尚、「車載通信装置」とは、車両内で携帯電話機やPHSを直接使うことにより通話を行う場合には、携帯電話機やPHSが該当する。一方、携帯電話機やPHSをハンズフリーユニットを備えたナビゲーション装置や専用のハンズフリーユニットに接続してハンズフリー通話を行う場合には、携帯電話機やPHSに加えてナビゲーション装置やハンズフリーユニットが該当する。
また、「通話状態」としては、(1)外部通信装置と通話中である状態、(2)外部通信装置からの発呼に対して着信中である状態、(3)いずれにも該当しない待受中である状態等がある。
【0008】
また、請求項2に係る運転支援装置(1)は、請求項1に記載の運転支援装置において、前記通話支援手段(13)は、前記制限エリア特定手段(13)によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置(1、2)の通話状態とに基づいて、前記車載通信装置を制御することを特徴とする。
【0009】
また、請求項3に係る運転支援装置(1)は、請求項2に記載の運転支援装置において、前記車両が前記制限エリア取得手段(13)によって取得された前記制限エリア内に位置するか否かを判定するエリア内判定手段(13)を有し、前記通話支援手段(13)は、前記エリア内判定手段により前記車両が前記制限エリア内に位置すると判定された場合であって、且つ外部通信装置から前記車両に搭載された車載通信装置(1、2)への着信があった場合に、その着信に対する応答を制御することを特徴とする。
【0010】
また、請求項4に係る運転支援装置(1)は、請求項3に記載の運転支援装置において、前記通話支援手段(13)は、前記エリア内判定手段(13)により前記車両が前記制限エリア内に位置すると判定された場合に、車両が制限エリアを退出する退出予定時刻を算出する退出予定時刻算出手段(13)を備え、発信元の前記外部通信装置に対して前記退出予定時刻を応答することを特徴とする。
【0011】
また、請求項5に係る運転支援装置(1)は、請求項1に記載の運転支援装置において、前記通話支援手段(13)は、前記制限エリア特定手段(13)によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置(1、2)の通話状態とに基づいて、前記制限エリアに関する案内を行うことを特徴とする。
【0012】
また、請求項6に係る運転支援方法は、外部通信装置との通話機能を備えた車載通信装置(1、2)の通信機能を制限すべき制限エリアを特定する制限エリア特定ステップ(S3)と、前記車両の現在位置を取得する車両位置取得ステップ(S11)と、前記車載通信装置の通話状態を取得する通話状態取得ステップ(S21)と、前記制限エリア特定ステップにおいて特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援ステップ(S8)と、を有することを特徴とする。
【0013】
更に、請求項7に記載のコンピュータプログラムによれば、コンピュータに搭載され、外部通信装置との通話機能を備えた車載通信装置(1、2)の通信機能を制限すべき制限エリアを特定する制限エリア特定機能(S3)と、前記車両の現在位置を取得する車両位置取得機能(S11)と、前記車載通信装置の通話状態を取得する通話状態取得機能(S21)と、前記制限エリア特定機能において特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援機能(S8)と、を実行させることを特徴とする。
【発明の効果】
【0014】
前記構成を有する請求項1に記載の運転支援装置によれば、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
【0015】
また、請求項2に記載の運転支援装置によれば、通話に対する支援として制限エリアと車両の現在位置との位置関係及び通話状態に基づいた車載通信装置の制御を行うので、外部通信装置との通話や着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
【0016】
また、請求項3に記載の運転支援装置によれば、車両が制限エリア内に位置する場合であって、外部通信装置からの着信があった場合に、その着信に対する応答を制御するので、着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
【0017】
また、請求項4に記載の運転支援装置によれば、車両が制限エリア内に位置する場合であって、外部通信装置からの着信があった場合に、車両が制限エリアを退出する退出予定時刻を外部通信装置からの着信に対して応答するので、発呼元の相手に対して今後に通話を適切に行うことができるタイミングを案内することが可能となる。それにより、着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
【0018】
また、請求項5に記載の運転支援装置によれば、通話に対する支援として車両で行われるハンズフリー通話等の通話機能を制限すべき制限エリアに関する案内を行うので、車両走行中の通話を控えるべきタイミングをユーザに把握させることが可能となる。
【0019】
また、請求項6に記載の運転支援方法によれば、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
【0020】
更に、請求項7に記載のコンピュータプログラムによれば、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
【発明を実施するための最良の形態】
【0021】
以下、本発明に係る運転支援装置についてナビゲーション装置1に具体化した一実施形態について図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。尚、本実施形態に係るナビゲーション装置1は、ハンズフリーユニットを内蔵したナビゲーション装置である。従って、後述のように携帯電話機2をナビゲーション装置1に接続(有線接続、無線接続を含む)することによって、車両内で携帯電話機2のハンズフリー通話を実現する車載ハンズフリーシステムを構成する。
【0022】
図1に示すように本実施形態に係るナビゲーション装置1は、自車の現在位置を検出する現在位置検出部11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU(制限エリア特定手段、車両位置取得手段、通話状態取得手段、通話支援手段、エリア内判定手段、退出予定時刻算出手段)13と、ユーザからの操作を受け付ける操作部14と、ユーザに対して地図等の情報を表示する液晶ディスプレイ15と、ハンズフリー通話中に運転者の声を集音するマイク16と、経路案内に関する音声ガイダンスやハンズフリー通話中に携帯電話機2で受信した受話音声を出力するスピーカ17と、プログラムを記憶した記憶媒体であるDVDを読み取るDVDドライブ18と、交通情報センタ等の情報センタとの間で通信を行う通信モジュール19と、有線接続または無線接続により接続された携帯電話機2との間で音声信号や制御信号等を送受信する通信接続装置20とから構成されている。
【0023】
以下に、ナビゲーション装置1を構成する各構成要素について順に説明する。
現在位置検出部11は、GPS21、地磁気センサ22、車速センサ23、ステアリングセンサ24、ジャイロセンサ25、高度計(図示せず)等からなり、現在の自車の位置、方位、自車の走行速度等を検出することが可能となっている。ここで、特に車速センサ23は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。尚、上記5種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
【0024】
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31、所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。
【0025】
ここで、地図情報DB31は、経路案内、交通情報案内及び地図表示に必要な各種地図データが記録されている。
また、地図データは、具体的には、道路(リンク)形状に関するリンクデータ33、ノード点に関するノードデータ34、各交差点に関する交差点データ35、施設に関する施設データ、経路を探索するための探索データ、地点を検索するための検索データ、地図、道路、交通情報等の画像を液晶ディスプレイ15に描画するための画像描画データ等から構成されている。また、リンクデータ33にはリンクの道路種別(高速道路、有料道路、一般道路、細街路)、周囲の明るさ、一方通行の有無、道路のレーン数、道路幅等の道路属性に関する情報も含まれている。また、交差点データ35としては、交差点の信号機の有無、高速道路の合流地点又は分岐地点に該当するか否かに関する情報も含まれている。
そして、本実施形態に係るナビゲーション装置1は、後述のように地図情報DB31に記憶された地図情報と自車の走行予定経路に基づいて、自車で行われるハンズフリー通話を対象として、その使用を制限すべきエリア(以下、制限エリアという)を特定する。
【0026】
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)13は、公知のダイクストラ法を用いて目的地への案内経路を探索する経路探索処理、設定された案内経路に従って走行を案内する走行案内処理、携帯電話機2を介してハンズフリー通話を行うハンズフリー通話処理、制限エリア内を自車両が走行する場合において走行中の通話支援を行う通話支援処理等のナビゲーション装置1の全体の制御を行う電子制御ユニットである。そして、演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うに当たってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ、位置フラグ、状態フラグ、着信フラグ、不許可フラグ等が記憶されるRAM42、ナビゲーション装置1の備える各種装置の制御用のプログラムのほか、後述の通話支援処理プログラム(図2参照)を記録するROM43、ROM43から読み出したプログラム等を記録するフラッシュメモリ44等の内部記憶装置を備えている。
【0027】
操作部14は、案内終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)から構成される。そして、ナビゲーションECU13は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、液晶ディスプレイ15の前面に設けたタッチパネルによって構成することもできる。また、本実施形態では操作部14はハンズフリー通話時において通話に関連する操作を行う際にも用いられる。
【0028】
また、液晶ディスプレイ15には、操作案内、操作メニュー、キーの案内、現在地から目的地までの案内経路、案内経路に沿った案内情報、交通情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。また、本実施形態ではハンズフリー通話時において、相手先の電話番号、電話帳、着信履歴、発信履歴、応答許可の確認画面等も液晶ディスプレイ15に表示される。
【0029】
また、マイク16は、ハンズフリー通話中にユーザの音声を集音する集音マイクである。マイク16はハンドルやフロントパネル上に配置される。そして、マイク16により集音したユーザの音声は音声信号に変換され、ナビゲーションECU13において増幅等の所定処理を行った後に通信接続装置20を介して携帯電話機2に転送される。
【0030】
また、スピーカ17は、具体的にナビゲーションECU13からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスを出力する。ここで、出力される音声ガイダンスとしては、例えば、「300m先の○○交差点を右方向です。」等がある。また、本実施形態ではスピーカ17は、ハンズフリー通話中に携帯電話機2が外部通信装置から受信した受話音声を出力する際にも用いられる。
【0031】
また、DVDドライブ18は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて地図情報DB31の更新等が行われる。
【0032】
また、通信接続装置20は携帯電話機2との間で音声信号、制御信号等の各種信号を送受信する通信装置である。そして、有線ケーブルを介した伝送方式又はBluetooth(ブルートゥース:登録商標)や無線LAN、DSRC等の近距離無線方式により携帯電話機2と接続される。
【0033】
また、携帯電話機2は外部通信装置(他の電話機器等の外部通信端末や、情報提供センター等)との間での電波送受信のための外部通信機能を有する通信装置である。また、携帯電話機2はハンズフリーユニットを内蔵したナビゲーション装置1や専用のハンズフリーユニットとの間で無線通信又は有線通信を行う通信インターフェースを備える。尚、携帯電話機の代わりにPHSを用いても良い。更に、携帯電話機2は、ユーザの車室内への入室に伴って車室内に持ち込まれるものであってよいが、常時車室内に維持される種の携帯電話機であってもよい。
【0034】
次に、上記構成を有するナビゲーション装置1及び携帯電話機2によって実現されるハンズフリーシステムについて以下に説明する。
ユーザがハンズフリーシステムにより相手先との通話を行う場合は、先ず操作部14で通話を開始する為の所定の操作を行う。その際、ナビゲーションECU13は操作部14の操作に応じて発信履歴、着信履歴、電話帳等をメモリから読み出し、液晶ディスプレイ15に表示させる。
その後、ユーザは液晶ディスプレイ15に表示された画面に従って通話する相手を特定した後、操作部14により発信操作を行う。その際、ナビゲーションECU13は、ユーザの操作により特定された相手先の電話番号を含む発信(発呼)を指示する信号を通信接続装置20を介して携帯電話機2送信するとともに、発信(発呼)指示した電話番号を発信履歴としてメモリに記憶する。
一方、携帯電話機2は、ナビゲーション装置1から相手先の電話番号を含む発呼を指示する信号を受信すると、その信号に含まれる相手先の電話番号に発呼する。その後、携帯電話機2と相手先の外部通信装置との間の通信が確立するとハンズフリー通話が可能となる。
【0035】
また、相手先の外部通信装置から携帯電話機2へ着呼があった場合には、携帯電話機2からナビゲーション装置1に通信インターフェースを介して相手の電話番号とともに着呼を通知する信号が送信される。ナビゲーションECU13は着呼を通知する信号を受信すると、相手の電話番号を着信履歴としてメモリに記憶するとともに、相手の電話番号、着呼の通知とともに応答許可の確認(例えば、応答許可する場合に押下される応答ボタン)を液晶ディスプレイ15に表示する。また、ユーザの操作部14の操作に応じて操作部14からユーザの応答許可を示す信号が入力されると、ナビゲーション装置1から携帯電話機2に許可信号を送信する。そして、携帯電話機2と相手先の外部通信装置との間の通信が確立するとハンズフリー通話が可能となる。
【0036】
また、ハンズフリー通話中にユーザが相手先との回線(通話)を切断する場合には、ユーザは操作部14を操作して回線切断の指示を入力する。これにより、ナビゲーションECU13から携帯電話機2に通信接続装置20を介して回線切断の指示が送信される。そして、携帯電話機2はこの指示に従って回線を切断する。
【0037】
また、相手先の切断操作により回線が切断された場合には、携帯電話機2からナビゲーション装置1に通信インターフェースを介して相手側の切断操作により回線が切断されたことを通知する信号が送信される。ナビゲーションECU13は、回線が切断されたことを通知する信号を受信すると、回線が切断された旨を液晶ディスプレイ15に表示する。
【0038】
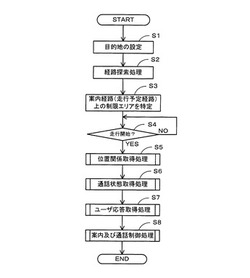
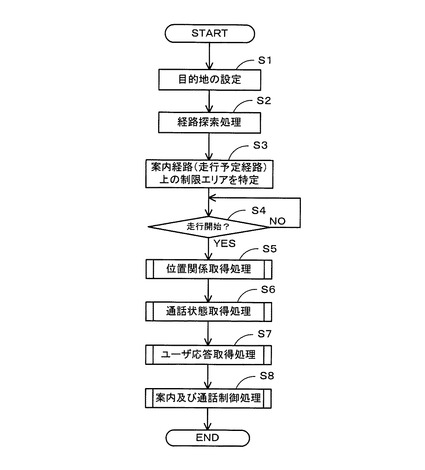
続いて、前記構成を有するナビゲーション装置1においてナビゲーションECU13が実行する通話支援処理プログラムについて図2に基づき説明する。図2は本実施形態に係る通話支援処理プログラムのフローチャートである。ここで、通話支援処理プログラムはナビゲーション装置1に対して携帯電話機2を接続し、ユーザにより目的地を設定する操作が操作部14で行われた後に実行され、制限エリア内を自車両が走行する場合においてハンズフリー通話の支援を行うプログラムである。また、以下の図2、図6〜図9にフローチャートで示されるプログラムは、ナビゲーション装置1が備えているRAM42やROM43に記憶されており、CPU41により実行される。
【0039】
先ず、通話支援処理プログラムではステップ(以下、Sと略記する)1において、CPU41は、ユーザにより行われた操作部14の操作に基づいて目的地を設定する。
【0040】
次に、S2においてCPU41は、地図情報DB31に記憶されたリンクデータやノードデータ等に基づいて、出発地(例えば自車の現在位置)から前記S1で設定された目的地までの経路探索処理を実行する。そして、経路探索の結果に基づいて案内経路(走行予定経路)を設定する。尚、経路探索処理は、公知のダイクストラ法等を用いて行う。
【0041】
続いて、S3においてCPU41は、地図情報DB31に記憶された地図情報に基づいて、前記S2で設定された案内経路(走行予定経路)上にある制限エリアを特定する。
ここで、以下に上記S3の制限エリアの特定処理について詳細を説明する。
【0042】
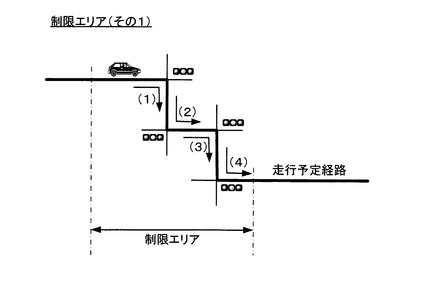
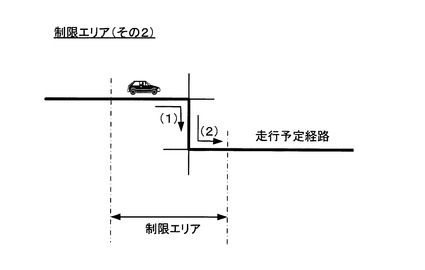
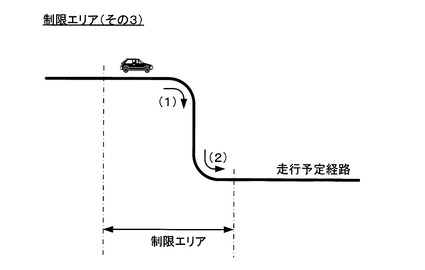
本実施形態では以下の(a)〜(f)のようなエリアを制限エリアとして特定する。尚、図3〜図5は制限エリアの一例を示した図である。
(a)所定範囲内(例えば1km内)に所定個数(例えば3個以上)以上の信号機が存在する交差点で進路変更をする経路が含まれる場合に、その連続する交差点の内の最初の交差点の所定距離(例えば300m)手前の地点から最後の交差点の所定距離(例えば100m)先の地点までのエリア(図3参照)。
(b)所定範囲内(例えば1km内)に所定個数(例えば2個以上)以上の信号機が存在しない交差点で進路変更を行い、細街路を走行する経路が含まれる場合に、その連続する交差点の内の最初の交差点の所定距離(例えば300m)手前の地点から最後の交差点の所定距離(例えば100m)先の地点までのエリア(図4参照)。
(c)所定範囲内(例えば1km内)に所定個数(例えば2個以上)以上のカーブを走行する経路が含まれる場合に、その連続するカーブの内の最初のカーブ開始点の所定距離(例えば300m)手前の地点から最後のカーブ終了点の所定距離(例えば100m)先の地点までのエリア(図5参照)。
(d)周囲の明るさが一定以下のエリア。
(e)市街地を走行するエリア。
(f)高速道路の合流地点又は分岐地点の所定距離(例えば300m)手前の地点から高速道路の合流地点又は分岐地点までのエリア。
尚、交差点及びカーブの位置、周囲の明るさ、市街地の範囲、高速道路の合流地点又は分岐地点の位置については地図情報DB31に予め記憶される。また、前記S3で特定された制限エリアは案内経路に関する情報とともに一旦RAM42に格納される。尚、上記S3が制限エリア特定手段の処理に相当する。
【0043】
その後、S4においてCPU41は、車速センサ23により自車が走行を開始したか否かを判定する。そして、自車が走行を開始したと判定された場合(S4:YES)には、S5へと移行する。一方、自車が走行を開始していないと判定された場合(S4:NO)には、走行が開始されるまで待機する。
【0044】
S5においてCPU41は、後述の位置関係取得処理(図6)を実行する。位置関係取得処理では、制限エリアと自車の位置関係を取得する。
【0045】
次に、S6においてCPU41は、後述の通話状態取得処理(図7)を実行する。通話状態取得処理では、車載ハンズフリーシステムにおける通話状態(ハンズフリー通話中か否か、着信中か否か)を取得する。
【0046】
また、S7においてCPU41は、後述のユーザ応答取得処理(図8)を実行する。ユーザ応答取得処理では、外部通信装置からの着信に対するユーザの応答態様を取得する。
【0047】
更に、S8においてCPU41は、後述の案内及び通話制御処理(図9)を実行する。案内及び通話制御処理では、前記S5〜S7で取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内を行ったり、ナビゲーション装置1及び携帯電話機2を制御する。その後、当該通話支援処理プログラムを終了する。尚、上記S8が通話支援手段の処理に相当する。
【0048】
次に、上記S5の位置関係取得処理のサブ処理について図6に基づき説明する。図6は本実施形態に係る位置関係取得処理のサブ処理プログラムのフローチャートである。
【0049】
位置関係取得処理において、先ずS11でCPU41は、現在位置検出部11により自車の現在位置や進行方向を検出する。また、検出した自車の現在位置を地図上で特定するマップマッチングも行われる。尚、上記S11が車両位置取得手段の処理に相当する。
【0050】
次に、S12においてCPU41は、RAM42から前記S3で特定した制限エリアに関する情報を読み出し、前記S11で取得した自車の現在位置が制限エリア内に位置するか否か判定する。
【0051】
そして、自車の現在位置が制限エリア内に位置すると判定された場合(S12:YES)には、S13へと移行する。それに対して、自車の現在位置が制限エリア外に位置すると判定された場合(S12:NO)には、S14へと移行する。
【0052】
S13においてCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグに「2」を代入する。尚、位置フラグは制限エリアに対する自車の現在位置の位置関係を特定するフラグであり、イグニションがONされた際に行われる初期設定処理で「0」に設定される。
【0053】
また、S14においてCPU41は、RAM42から前記S3で特定した制限エリアに関する情報を読み出し、前記S11で取得した自車の現在位置が制限エリアの開始点から所定距離以内(例えば300m以内)に位置するか否か判定する。
【0054】
そして、自車の現在位置が制限エリアの開始点から所定距離以内に位置すると判定された場合(S14:YES)には、S15へと移行する。それに対して、自車の現在位置が制限エリアの開始点から所定距離以内に位置しないと判定された場合(S14:NO)には、S16へと移行する。
【0055】
S15においてCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグに「1」を代入する。また、S16においてCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグに「0」を代入する。その後、S6へと移行する。
【0056】
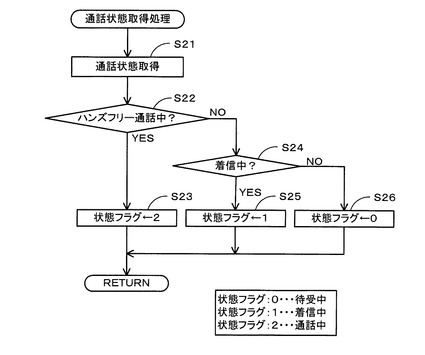
次に、上記S6の通話状態取得処理のサブ処理について図7に基づき説明する。図7は本実施形態に係る通話状態取得処理のサブ処理プログラムのフローチャートである。
【0057】
通話状態取得処理において、先ずS21でCPU41は、ナビゲーション装置1及び携帯電話機2から構成される車載ハンズフリーシステムの通話状態を取得する。尚、通話状態は、(1)外部通信装置と通話中である状態、(2)外部通信装置からの発呼に対して着信中である状態、(3)いずれにも該当しない待受中である状態、のいずれかの状態に分類される。また、上記S21が通話状態取得手段の処理に相当する。
【0058】
次に、S22においてCPU41は、前記S21で取得した通話状態が外部通信装置と通話中であるか否か判定する。
【0059】
そして、通話状態が外部通信装置と通話中であると判定された場合(S22:YES)には、S23へと移行する。それに対して、通話状態が外部通信装置と通話中でないと判定された場合(S22:NO)には、S24へと移行する。
【0060】
S23においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグに「2」を代入する。尚、状態フラグはナビゲーション装置1及び携帯電話機2から構成される車載ハンズフリーシステムの通話状態を特定するフラグであり、イグニションがONされた際に行われる初期設定処理で「0」に設定される。
【0061】
また、S24においてCPU41は、前記S21で取得した通話状態が外部通信装置からの発呼に対して着信中であるか否か判定する。
【0062】
そして、通話状態が外部通信装置からの発呼に対して着信中であると判定された場合(S24:YES)には、S25へと移行する。それに対して、通話状態が外部通信装置からの発呼に対して着信中でないと判定された場合(S24:NO)には、S26へと移行する。
【0063】
S25においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグに「1」を代入する。また、S26においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグに「0」を代入する。その後、S7へと移行する。
【0064】
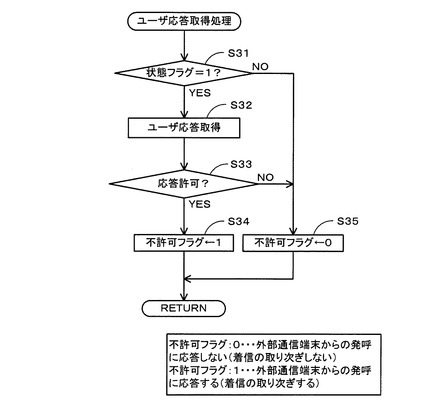
次に、上記S7のユーザ応答取得処理のサブ処理について図8に基づき説明する。図8は本実施形態に係るユーザ応答取得処理のサブ処理プログラムのフローチャートである。
【0065】
ユーザ応答取得処理において、先ずS31でCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグが「1」であるか否か判定する。
【0066】
そして、状態フラグが「1」であると判定された場合(S31:YES)、即ち、外部通信装置からの発呼に対して着信中であると判定された場合には、S32へと移行する。それに対して、状態フラグが「1」でないと判定された場合(S31:NO)には、S35へと移行する。
【0067】
S32においてCPU41は、外部通信装置からの着信に対するユーザの応答態様を取得する。具体的には、発呼先の相手の電話番号、着呼の通知とともに応答許可の確認(例えば、応答許可する場合に押下される応答ボタン)を液晶ディスプレイ15に表示し、ユーザが応答許可を選択したか否かを特定する。
尚、ユーザの応答態様は着信がある度にユーザによって選択された選択結果に基づいて特定される場合に限られない。例えば、予めナビゲーション装置1において着信があった場合に一律に応答することが設定されている場合には、常にユーザが応答するとしてユーザの応答態様を取得する。また、予めナビゲーション装置1において着信があった場合に一律に応答しないことが設定されている場合には、常にユーザが応答しないとしてユーザの応答態様を取得する。
【0068】
次に、S33においてCPU41は、前記S32で取得したユーザの応答態様が外部通信装置からの着信の取り次ぎを許可する態様(即ち、応答許可する態様)であるか否か判定する。
【0069】
そして、ユーザの応答態様が外部通信装置からの着信の取り次ぎを許可する態様であると判定された場合(S33:YES)には、S34へと移行する。それに対して、ユーザの応答態様が外部通信装置からの着信の取り次ぎを許可しない態様であると判定された場合(S33:NO)には、S35へと移行する。
【0070】
S34においてCPU41は、RAM42に記憶された不許可フラグを読み出し、不許可フラグに「1」を代入する。また、S35においてCPU41は、RAM42に記憶された不許可フラグを読み出し、不許可フラグに「0」を代入する。その後、S8へと移行する。尚、不許可フラグはユーザの外部通信装置の発呼に対する応答態様、即ち、着信の取り次ぎを許可するか否かを特定するフラグであり、イグニションがONされた際に行われる初期設定処理で「0」に設定される。
【0071】
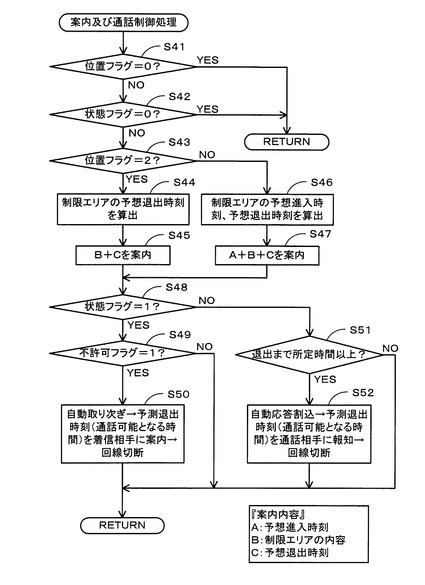
次に、上記S8の案内及び通話制御処理のサブ処理について図9に基づき説明する。図9は本実施形態に係る案内及び通話制御処理のサブ処理プログラムのフローチャートである。
【0072】
案内及び通話制御処理において、先ずS41でCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグが「0」であるか否か判定する。
【0073】
そして、位置フラグが「0」であると判定された場合(S41:YES)、即ち、自車が制限エリア外で且つ開始点から所定距離以内でもない安全エリアに位置すると判定された場合には、通話状態にかかわらず自車が安全に走行することが可能であるとし、当該通話支援処理プログラムを終了する。
【0074】
一方、位置フラグが「0」でないと判定された場合(S41:NO)、即ち、自車が制限エリア内又は制限エリアの開始点から所定距離以内(例えば300m以内)に位置すると判定された場合には、S42へと移行する。
【0075】
S42においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグが「0」であるか否か判定する。
【0076】
そして、状態フラグが「0」であると判定された場合(S42:YES)、即ち、外部通信装置と通話中でもなく、外部通信装置の発呼に対して着信中でもないと判定された場合には、当該通話支援処理プログラムを終了する。
【0077】
一方、状態フラグが「0」でないと判定された場合(S42:NO)、即ち、外部通信装置と通話中か、或いは外部通信装置の発呼に対して着信中であると判定された場合には、S43へと移行する。
【0078】
次に、S43でCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグが「2」であるか否か判定する。
【0079】
そして、位置フラグが「2」であると判定された場合(S43:YES)、即ち、自車が制限エリア内に位置すると判定された場合には、S44へと移行する。それに対して、位置フラグが「2」でないと判定された場合(S43:NO)、即ち、自車が制限エリア開始点から所定距離以内(例えば300m以内)に位置すると判定された場合には、S46へと移行する。尚、上記S41、S43がエリア内判定手段の処理に相当する。
【0080】
S44においてCPU41は、自車の現在位置と走行予定経路とRAM42から読み出した制限エリアと地図情報DB31から読み出した地図情報とに基づいて、自車が現在位置する制限エリアを退出する予想退出時刻を算出する。尚、予想退出時刻の算出には、道路種別(高速道路、有料道路、一般道路)毎に予め設定された平均車速が用いられる。
【0081】
続いて、S45においてCPU41は、自車が現在位置する制限エリアの内容と前記S44で算出した予想退出時刻をユーザに案内する。具体提起には、制限エリアの内容や予想退出時刻を液晶ディスプレイ15に表示したり、スピーカ17から出力する。尚、制限エリアの内容とは、自車が現在位置する制限エリアが前記S3で述べた(a)〜(f)のいずれかの条件に該当する制限エリアであるかを案内するものであり、例えば「この先、進路変更をすべき交差点が多くあります。」、「この先、カーブが多くあります。」等がある。
【0082】
ここで、図10は前記S45においてナビゲーション装置1の液晶ディスプレイ15に表示される案内画面を示した図である。
図10に示すように、液晶ディスプレイ15には自車周辺の地図画像とともに、制限エリアの内容や予想退出時刻を案内するメッセージウィンドウ71が表示される。例えば、図10に示すメッセージウィンドウ71では、自車が進路変更をすべき交差点が多い制限エリアに位置すること、及び予想退出時刻が8:27であることをユーザに案内する。
そして、CPU41は前記S45の案内処理を行った後、S48へと移行する。尚、案内を行う回数や時間に制限を設けるようにしても良い。
また、外部通信装置と通話中に制限エリアへと進入した場合と、外部通信装置からの発呼の着信中に制限エリアへと進入した場合とで、案内処理の内容を変更しても良い。例えば、外部通信装置と通話中に制限エリアへと進入した場合には、通信相手先からの音声出力に対して案内音声を割り込ませてスピーカ17や図示しないイヤホンから出力する。また、外部通信装置からの発呼の着信中に制限エリアへと進入した場合には、液晶ディスプレイ15に案内内容を出力する。
【0083】
一方、S46においてCPU41は、自車の現在位置と走行予定経路とRAM42から読み出した制限エリアと地図情報DB31から読み出した地図情報とに基づいて、自車の進行方向前方に位置する制限エリアに進入する予想進入時刻と退出する予想退出時刻を算出する。尚、予想進入時刻及び予想退出時刻の算出には、道路種別(高速道路、有料道路、一般道路)毎に予め設定された平均車速が用いられる。また、上記S44、46が退出予定時刻算出手段の処理に相当する。
【0084】
続いて、S47においてCPU41は、自車の進行方向前方にある制限エリアの内容と前記S46で算出した予想進入時刻及び予想退出時刻をユーザに案内する。具体的には、制限エリアの内容、予想退出時刻及び予想進入時刻を液晶ディスプレイ15に表示したり、スピーカ17から出力する(図10参照)。その後、S48へと移行する。尚、案内を行う回数や時間に制限を設けるようにしても良い。
【0085】
S48においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグが「1」であるか否か判定する。
【0086】
そして、状態フラグが「1」であると判定された場合(S48:YES)、即ち、外部通信装置の発呼に対して着信中であると判定された場合には、S49へと移行する。一方、状態フラグが「1」でないと判定された場合(S48:NO)、即ち、外部通信装置と通話中であると判定された場合には、S51へと移行する。
【0087】
また、S49においてCPU41は、RAM42に記憶された不許可フラグを読み出し、不許可フラグが「1」であるか否か判定する。
【0088】
そして、不許可フラグが「1」であると判定された場合(S49:YES)、即ち、外部通信装置からの発呼に対してユーザが着信の取り次ぎを許可する場合には、S50へと移行する。一方、不許可フラグが「1」でないと判定された場合(S49:NO)、外部通信装置の発呼に対してユーザが着信の取り次ぎを許可しない場合には、着信を行わずに当該通話支援処理プログラムを終了する。
【0089】
S50においてCPU41は、着信に対して自動で取り次ぎを実行し、通信を確立する。そして、予想退出時刻(即ち、自車が制限エリアを抜けて通話可能となる時刻)を案内する音声メッセージを携帯電話機2を介して発呼側の外部通信装置に対して送信する。音声メッセージを送信した後、携帯電話機2に回線切断の指示を送信し、回線を切断する。それによって、着信に対する応答に係るユーザの負担を軽減するとともに、発呼元の相手に対して通話を適切に行うことができるタイミングを案内することが可能となる。
【0090】
また、S51においてCPU41は、前記S44又はS46で算出された制限エリアの予想退出時間に基づいて、制限エリアを退出するまでの時間が所定時間(例えば5分)以上であるか否か判定する。
【0091】
そして、制限エリアを退出するまでの時間が所定時間(例えば5分)以上であると判定された場合(S51:YES)には、S52へと移行する。一方、制限エリアを退出するまでの時間が所定時間未満であると判定された場合(S51:NO)には、通話の制限は行わずに、継続して通話を行わせる。
【0092】
S52においてCPU41は、通話中の回線に対して自動で応答割り込みを行う。そして、予想退出時刻(即ち、自車が制限エリアを抜けて通話可能となる時刻)を案内する音声メッセージを携帯電話機2を介して発呼側の外部通信装置に対して送信する。音声メッセージを送信した後、携帯電話機2に回線切断の指示を送信し、回線を切断する。それによって、通話に係るユーザの負担を軽減するとともに、発呼元の相手に対して通話を適切に行うことができるタイミングを案内することが可能となる。
【0093】
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1、ナビゲーション装置1による運転支援方法及びナビゲーション装置1で実行されるコンピュータプログラムでは、自車の走行予定経路を取得し(S2)、走行予定経路上にあるハンズフリー通信を制限すべき制限エリアを特定し(S3)、自車の現在位置と制限エリアとの位置関係を取得し(S5)、車載ハンズフリーシステムにおける通話状態を取得し(S6)、着信に対するユーザ応答態様を取得し(S7)、取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2の制御を行う(S8)ので、通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
また、通話に対する支援として制限エリアに関する案内を行う(S45、S47)ので、車両走行中の通話を控えるべきタイミングをユーザに把握させることが可能となる。
また、通話に対する支援として自動応答、メッセージ送信、自動切断等のハンズフリーシステムの制御を行う(S50、S52)ので、外部通信装置との通話や着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
また、車両が制限エリア内に位置する場合であって、外部通信装置からの着信があった場合に、車両が制限エリアを退出する退出予定時刻を外部通信装置からの着信に対して応答する(S50)ので、発呼元の相手に対して今後に通話を適切に行うことができるタイミングを案内することが可能となる。
【0094】
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態では走行予定経路中にある制限エリアを特定する際に、前記S3で述べた(a)〜(f)のようなエリアを制限エリアとして特定しているが、(a)〜(f)以外の条件を設けても良い。例えば、道路幅が所定幅以下である道路を走行するエリアについても制限エリアとして特定しても良い。
【0095】
また、本実施形態では携帯電話機2をハンズフリーユニットを内蔵したナビゲーション装置1に接続することにより車載ハンズフリーシステムを構成しているが、携帯電話機2を専用のハンズフリーユニットに接続することにより車載ハンズフリーシステムを構成しても良い。その場合には、ハンズフリーユニットが本願発明の運転支援装置に相当する。
【0096】
また、本実施形態では自車が制限エリア内に位置する場合に加えて、制限エリアの開始点から所定距離以内(例えば300m以内)に位置する場合にも、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2の制御を行っているが、自車が制限エリア内に位置する場合のみに制限エリアに関する案内やナビゲーション装置1及び携帯電話機2の制御を行う構成としても良い。
【図面の簡単な説明】
【0097】
【図1】本実施形態に係るナビゲーション装置1を示したブロック図である。
【図2】本実施形態に係る通話支援処理プログラムのフローチャートである。
【図3】制限エリアの一例を示した図である。
【図4】制限エリアの一例を示した図である。
【図5】制限エリアの一例を示した図である。
【図6】本実施形態に係る位置関係取得処理のサブ処理プログラムのフローチャートである。
【図7】本実施形態に係る通話状態取得処理のサブ処理プログラムのフローチャートである。
【図8】本実施形態に係るユーザ応答取得処理のサブ処理プログラムのフローチャートである。
【図9】本実施形態に係る案内及び通話制御処理のサブ処理プログラムのフローチャートである。
【図10】制限エリアと予想退出時刻を案内する案内画面を示した図である。
【符号の説明】
【0098】
1 ナビゲーション装置
2 携帯電話機
13 ナビゲーションECU
41 CPU
42 RAM
43 ROM
【技術分野】
【0001】
本発明は、通話機能を備えた車載通信装置が搭載された車両において車載通信装置による通話に対する支援を行う運転支援装置、運転支援方法及びコンピュータプログラムに関する。
【背景技術】
【0002】
近年、携帯電話機が広く普及している。そして、携帯電話機は自動車等の車両内においても使用可能であるが、車両走行中における携帯電話機の操作は安全性の面から禁止されている。そこで、近年では車両走行中に携帯電話機による通話を行う場合には、車両の運転操作に大きな支障を与えないように、携帯電話機を持たずに操作・通話が可能となるハンズフリー通話が行われている。このハンズフリー通話は、携帯電話機をハンズフリーユニットを内蔵したナビゲーション装置や専用のハンズフリーユニットと接続することにより実現可能となる。
【0003】
しかしながら、ハンズフリー通話により通話を行う場合であっても、通話中においては運転者の運転に対する集中力が少なからず低下する。ここで、例えば特開2002−64652号公報には、携帯電話機が予め設定された使用禁止エリアに位置する場合にその携帯電話機の接続要求を規制することや、通信先の携帯電話機が使用禁止エリアに位置する場合に携帯電話機の発信動作を停止させる技術について記載されている。
【特許文献1】特開2002−64852号公報(第6〜7頁、図5〜図8)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載された技術では、携帯電話機が予め設定された使用禁止エリアに位置する場合にその携帯電話機の接続要求を規制することや、通信先の携帯電話機が使用禁止エリアに位置する場合に携帯電話機の発信動作を停止させることは記載されているが、携帯電話機の通話状態に応じて携帯電話機の制御を行うことは記載されていない。
【0005】
ここで、特に車両に搭載された通信装置は、通常の携帯電話機や固定電話と異なり、一定のエリア内に留まった状態で使用されることは少なく、一定以上の速度で移動しながら使用されることが多い。従って、例えば外部通信装置と通話した状態や外部通信装置から着信がある状態で使用禁止エリアに進入する場合がある。このような場合において、従来の上記特許文献1に記載された技術では、適切な支援を行うことができなかった。
【0006】
本発明は前記従来における問題点を解消するためになされたものであり、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することを可能とした運転支援装置、運転支援方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するため本願の請求項1に係る運転支援装置(1)は、外部通信装置との通話機能を備えた車載通信装置(1、2)の通信機能を制限すべき制限エリアを特定する制限エリア特定手段(13)と、前記車両の現在位置を取得する車両位置取得手段(13)と、前記車載通信装置の通話状態を取得する通話状態取得手段(13)と、前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援手段(13)と、を有することを特徴とする。
尚、「車載通信装置」とは、車両内で携帯電話機やPHSを直接使うことにより通話を行う場合には、携帯電話機やPHSが該当する。一方、携帯電話機やPHSをハンズフリーユニットを備えたナビゲーション装置や専用のハンズフリーユニットに接続してハンズフリー通話を行う場合には、携帯電話機やPHSに加えてナビゲーション装置やハンズフリーユニットが該当する。
また、「通話状態」としては、(1)外部通信装置と通話中である状態、(2)外部通信装置からの発呼に対して着信中である状態、(3)いずれにも該当しない待受中である状態等がある。
【0008】
また、請求項2に係る運転支援装置(1)は、請求項1に記載の運転支援装置において、前記通話支援手段(13)は、前記制限エリア特定手段(13)によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置(1、2)の通話状態とに基づいて、前記車載通信装置を制御することを特徴とする。
【0009】
また、請求項3に係る運転支援装置(1)は、請求項2に記載の運転支援装置において、前記車両が前記制限エリア取得手段(13)によって取得された前記制限エリア内に位置するか否かを判定するエリア内判定手段(13)を有し、前記通話支援手段(13)は、前記エリア内判定手段により前記車両が前記制限エリア内に位置すると判定された場合であって、且つ外部通信装置から前記車両に搭載された車載通信装置(1、2)への着信があった場合に、その着信に対する応答を制御することを特徴とする。
【0010】
また、請求項4に係る運転支援装置(1)は、請求項3に記載の運転支援装置において、前記通話支援手段(13)は、前記エリア内判定手段(13)により前記車両が前記制限エリア内に位置すると判定された場合に、車両が制限エリアを退出する退出予定時刻を算出する退出予定時刻算出手段(13)を備え、発信元の前記外部通信装置に対して前記退出予定時刻を応答することを特徴とする。
【0011】
また、請求項5に係る運転支援装置(1)は、請求項1に記載の運転支援装置において、前記通話支援手段(13)は、前記制限エリア特定手段(13)によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置(1、2)の通話状態とに基づいて、前記制限エリアに関する案内を行うことを特徴とする。
【0012】
また、請求項6に係る運転支援方法は、外部通信装置との通話機能を備えた車載通信装置(1、2)の通信機能を制限すべき制限エリアを特定する制限エリア特定ステップ(S3)と、前記車両の現在位置を取得する車両位置取得ステップ(S11)と、前記車載通信装置の通話状態を取得する通話状態取得ステップ(S21)と、前記制限エリア特定ステップにおいて特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援ステップ(S8)と、を有することを特徴とする。
【0013】
更に、請求項7に記載のコンピュータプログラムによれば、コンピュータに搭載され、外部通信装置との通話機能を備えた車載通信装置(1、2)の通信機能を制限すべき制限エリアを特定する制限エリア特定機能(S3)と、前記車両の現在位置を取得する車両位置取得機能(S11)と、前記車載通信装置の通話状態を取得する通話状態取得機能(S21)と、前記制限エリア特定機能において特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援機能(S8)と、を実行させることを特徴とする。
【発明の効果】
【0014】
前記構成を有する請求項1に記載の運転支援装置によれば、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
【0015】
また、請求項2に記載の運転支援装置によれば、通話に対する支援として制限エリアと車両の現在位置との位置関係及び通話状態に基づいた車載通信装置の制御を行うので、外部通信装置との通話や着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
【0016】
また、請求項3に記載の運転支援装置によれば、車両が制限エリア内に位置する場合であって、外部通信装置からの着信があった場合に、その着信に対する応答を制御するので、着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
【0017】
また、請求項4に記載の運転支援装置によれば、車両が制限エリア内に位置する場合であって、外部通信装置からの着信があった場合に、車両が制限エリアを退出する退出予定時刻を外部通信装置からの着信に対して応答するので、発呼元の相手に対して今後に通話を適切に行うことができるタイミングを案内することが可能となる。それにより、着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
【0018】
また、請求項5に記載の運転支援装置によれば、通話に対する支援として車両で行われるハンズフリー通話等の通話機能を制限すべき制限エリアに関する案内を行うので、車両走行中の通話を控えるべきタイミングをユーザに把握させることが可能となる。
【0019】
また、請求項6に記載の運転支援方法によれば、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
【0020】
更に、請求項7に記載のコンピュータプログラムによれば、車載通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
【発明を実施するための最良の形態】
【0021】
以下、本発明に係る運転支援装置についてナビゲーション装置1に具体化した一実施形態について図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。尚、本実施形態に係るナビゲーション装置1は、ハンズフリーユニットを内蔵したナビゲーション装置である。従って、後述のように携帯電話機2をナビゲーション装置1に接続(有線接続、無線接続を含む)することによって、車両内で携帯電話機2のハンズフリー通話を実現する車載ハンズフリーシステムを構成する。
【0022】
図1に示すように本実施形態に係るナビゲーション装置1は、自車の現在位置を検出する現在位置検出部11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU(制限エリア特定手段、車両位置取得手段、通話状態取得手段、通話支援手段、エリア内判定手段、退出予定時刻算出手段)13と、ユーザからの操作を受け付ける操作部14と、ユーザに対して地図等の情報を表示する液晶ディスプレイ15と、ハンズフリー通話中に運転者の声を集音するマイク16と、経路案内に関する音声ガイダンスやハンズフリー通話中に携帯電話機2で受信した受話音声を出力するスピーカ17と、プログラムを記憶した記憶媒体であるDVDを読み取るDVDドライブ18と、交通情報センタ等の情報センタとの間で通信を行う通信モジュール19と、有線接続または無線接続により接続された携帯電話機2との間で音声信号や制御信号等を送受信する通信接続装置20とから構成されている。
【0023】
以下に、ナビゲーション装置1を構成する各構成要素について順に説明する。
現在位置検出部11は、GPS21、地磁気センサ22、車速センサ23、ステアリングセンサ24、ジャイロセンサ25、高度計(図示せず)等からなり、現在の自車の位置、方位、自車の走行速度等を検出することが可能となっている。ここで、特に車速センサ23は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。尚、上記5種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
【0024】
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31、所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。
【0025】
ここで、地図情報DB31は、経路案内、交通情報案内及び地図表示に必要な各種地図データが記録されている。
また、地図データは、具体的には、道路(リンク)形状に関するリンクデータ33、ノード点に関するノードデータ34、各交差点に関する交差点データ35、施設に関する施設データ、経路を探索するための探索データ、地点を検索するための検索データ、地図、道路、交通情報等の画像を液晶ディスプレイ15に描画するための画像描画データ等から構成されている。また、リンクデータ33にはリンクの道路種別(高速道路、有料道路、一般道路、細街路)、周囲の明るさ、一方通行の有無、道路のレーン数、道路幅等の道路属性に関する情報も含まれている。また、交差点データ35としては、交差点の信号機の有無、高速道路の合流地点又は分岐地点に該当するか否かに関する情報も含まれている。
そして、本実施形態に係るナビゲーション装置1は、後述のように地図情報DB31に記憶された地図情報と自車の走行予定経路に基づいて、自車で行われるハンズフリー通話を対象として、その使用を制限すべきエリア(以下、制限エリアという)を特定する。
【0026】
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)13は、公知のダイクストラ法を用いて目的地への案内経路を探索する経路探索処理、設定された案内経路に従って走行を案内する走行案内処理、携帯電話機2を介してハンズフリー通話を行うハンズフリー通話処理、制限エリア内を自車両が走行する場合において走行中の通話支援を行う通話支援処理等のナビゲーション装置1の全体の制御を行う電子制御ユニットである。そして、演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うに当たってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ、位置フラグ、状態フラグ、着信フラグ、不許可フラグ等が記憶されるRAM42、ナビゲーション装置1の備える各種装置の制御用のプログラムのほか、後述の通話支援処理プログラム(図2参照)を記録するROM43、ROM43から読み出したプログラム等を記録するフラッシュメモリ44等の内部記憶装置を備えている。
【0027】
操作部14は、案内終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)から構成される。そして、ナビゲーションECU13は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、液晶ディスプレイ15の前面に設けたタッチパネルによって構成することもできる。また、本実施形態では操作部14はハンズフリー通話時において通話に関連する操作を行う際にも用いられる。
【0028】
また、液晶ディスプレイ15には、操作案内、操作メニュー、キーの案内、現在地から目的地までの案内経路、案内経路に沿った案内情報、交通情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。また、本実施形態ではハンズフリー通話時において、相手先の電話番号、電話帳、着信履歴、発信履歴、応答許可の確認画面等も液晶ディスプレイ15に表示される。
【0029】
また、マイク16は、ハンズフリー通話中にユーザの音声を集音する集音マイクである。マイク16はハンドルやフロントパネル上に配置される。そして、マイク16により集音したユーザの音声は音声信号に変換され、ナビゲーションECU13において増幅等の所定処理を行った後に通信接続装置20を介して携帯電話機2に転送される。
【0030】
また、スピーカ17は、具体的にナビゲーションECU13からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスを出力する。ここで、出力される音声ガイダンスとしては、例えば、「300m先の○○交差点を右方向です。」等がある。また、本実施形態ではスピーカ17は、ハンズフリー通話中に携帯電話機2が外部通信装置から受信した受話音声を出力する際にも用いられる。
【0031】
また、DVDドライブ18は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて地図情報DB31の更新等が行われる。
【0032】
また、通信接続装置20は携帯電話機2との間で音声信号、制御信号等の各種信号を送受信する通信装置である。そして、有線ケーブルを介した伝送方式又はBluetooth(ブルートゥース:登録商標)や無線LAN、DSRC等の近距離無線方式により携帯電話機2と接続される。
【0033】
また、携帯電話機2は外部通信装置(他の電話機器等の外部通信端末や、情報提供センター等)との間での電波送受信のための外部通信機能を有する通信装置である。また、携帯電話機2はハンズフリーユニットを内蔵したナビゲーション装置1や専用のハンズフリーユニットとの間で無線通信又は有線通信を行う通信インターフェースを備える。尚、携帯電話機の代わりにPHSを用いても良い。更に、携帯電話機2は、ユーザの車室内への入室に伴って車室内に持ち込まれるものであってよいが、常時車室内に維持される種の携帯電話機であってもよい。
【0034】
次に、上記構成を有するナビゲーション装置1及び携帯電話機2によって実現されるハンズフリーシステムについて以下に説明する。
ユーザがハンズフリーシステムにより相手先との通話を行う場合は、先ず操作部14で通話を開始する為の所定の操作を行う。その際、ナビゲーションECU13は操作部14の操作に応じて発信履歴、着信履歴、電話帳等をメモリから読み出し、液晶ディスプレイ15に表示させる。
その後、ユーザは液晶ディスプレイ15に表示された画面に従って通話する相手を特定した後、操作部14により発信操作を行う。その際、ナビゲーションECU13は、ユーザの操作により特定された相手先の電話番号を含む発信(発呼)を指示する信号を通信接続装置20を介して携帯電話機2送信するとともに、発信(発呼)指示した電話番号を発信履歴としてメモリに記憶する。
一方、携帯電話機2は、ナビゲーション装置1から相手先の電話番号を含む発呼を指示する信号を受信すると、その信号に含まれる相手先の電話番号に発呼する。その後、携帯電話機2と相手先の外部通信装置との間の通信が確立するとハンズフリー通話が可能となる。
【0035】
また、相手先の外部通信装置から携帯電話機2へ着呼があった場合には、携帯電話機2からナビゲーション装置1に通信インターフェースを介して相手の電話番号とともに着呼を通知する信号が送信される。ナビゲーションECU13は着呼を通知する信号を受信すると、相手の電話番号を着信履歴としてメモリに記憶するとともに、相手の電話番号、着呼の通知とともに応答許可の確認(例えば、応答許可する場合に押下される応答ボタン)を液晶ディスプレイ15に表示する。また、ユーザの操作部14の操作に応じて操作部14からユーザの応答許可を示す信号が入力されると、ナビゲーション装置1から携帯電話機2に許可信号を送信する。そして、携帯電話機2と相手先の外部通信装置との間の通信が確立するとハンズフリー通話が可能となる。
【0036】
また、ハンズフリー通話中にユーザが相手先との回線(通話)を切断する場合には、ユーザは操作部14を操作して回線切断の指示を入力する。これにより、ナビゲーションECU13から携帯電話機2に通信接続装置20を介して回線切断の指示が送信される。そして、携帯電話機2はこの指示に従って回線を切断する。
【0037】
また、相手先の切断操作により回線が切断された場合には、携帯電話機2からナビゲーション装置1に通信インターフェースを介して相手側の切断操作により回線が切断されたことを通知する信号が送信される。ナビゲーションECU13は、回線が切断されたことを通知する信号を受信すると、回線が切断された旨を液晶ディスプレイ15に表示する。
【0038】
続いて、前記構成を有するナビゲーション装置1においてナビゲーションECU13が実行する通話支援処理プログラムについて図2に基づき説明する。図2は本実施形態に係る通話支援処理プログラムのフローチャートである。ここで、通話支援処理プログラムはナビゲーション装置1に対して携帯電話機2を接続し、ユーザにより目的地を設定する操作が操作部14で行われた後に実行され、制限エリア内を自車両が走行する場合においてハンズフリー通話の支援を行うプログラムである。また、以下の図2、図6〜図9にフローチャートで示されるプログラムは、ナビゲーション装置1が備えているRAM42やROM43に記憶されており、CPU41により実行される。
【0039】
先ず、通話支援処理プログラムではステップ(以下、Sと略記する)1において、CPU41は、ユーザにより行われた操作部14の操作に基づいて目的地を設定する。
【0040】
次に、S2においてCPU41は、地図情報DB31に記憶されたリンクデータやノードデータ等に基づいて、出発地(例えば自車の現在位置)から前記S1で設定された目的地までの経路探索処理を実行する。そして、経路探索の結果に基づいて案内経路(走行予定経路)を設定する。尚、経路探索処理は、公知のダイクストラ法等を用いて行う。
【0041】
続いて、S3においてCPU41は、地図情報DB31に記憶された地図情報に基づいて、前記S2で設定された案内経路(走行予定経路)上にある制限エリアを特定する。
ここで、以下に上記S3の制限エリアの特定処理について詳細を説明する。
【0042】
本実施形態では以下の(a)〜(f)のようなエリアを制限エリアとして特定する。尚、図3〜図5は制限エリアの一例を示した図である。
(a)所定範囲内(例えば1km内)に所定個数(例えば3個以上)以上の信号機が存在する交差点で進路変更をする経路が含まれる場合に、その連続する交差点の内の最初の交差点の所定距離(例えば300m)手前の地点から最後の交差点の所定距離(例えば100m)先の地点までのエリア(図3参照)。
(b)所定範囲内(例えば1km内)に所定個数(例えば2個以上)以上の信号機が存在しない交差点で進路変更を行い、細街路を走行する経路が含まれる場合に、その連続する交差点の内の最初の交差点の所定距離(例えば300m)手前の地点から最後の交差点の所定距離(例えば100m)先の地点までのエリア(図4参照)。
(c)所定範囲内(例えば1km内)に所定個数(例えば2個以上)以上のカーブを走行する経路が含まれる場合に、その連続するカーブの内の最初のカーブ開始点の所定距離(例えば300m)手前の地点から最後のカーブ終了点の所定距離(例えば100m)先の地点までのエリア(図5参照)。
(d)周囲の明るさが一定以下のエリア。
(e)市街地を走行するエリア。
(f)高速道路の合流地点又は分岐地点の所定距離(例えば300m)手前の地点から高速道路の合流地点又は分岐地点までのエリア。
尚、交差点及びカーブの位置、周囲の明るさ、市街地の範囲、高速道路の合流地点又は分岐地点の位置については地図情報DB31に予め記憶される。また、前記S3で特定された制限エリアは案内経路に関する情報とともに一旦RAM42に格納される。尚、上記S3が制限エリア特定手段の処理に相当する。
【0043】
その後、S4においてCPU41は、車速センサ23により自車が走行を開始したか否かを判定する。そして、自車が走行を開始したと判定された場合(S4:YES)には、S5へと移行する。一方、自車が走行を開始していないと判定された場合(S4:NO)には、走行が開始されるまで待機する。
【0044】
S5においてCPU41は、後述の位置関係取得処理(図6)を実行する。位置関係取得処理では、制限エリアと自車の位置関係を取得する。
【0045】
次に、S6においてCPU41は、後述の通話状態取得処理(図7)を実行する。通話状態取得処理では、車載ハンズフリーシステムにおける通話状態(ハンズフリー通話中か否か、着信中か否か)を取得する。
【0046】
また、S7においてCPU41は、後述のユーザ応答取得処理(図8)を実行する。ユーザ応答取得処理では、外部通信装置からの着信に対するユーザの応答態様を取得する。
【0047】
更に、S8においてCPU41は、後述の案内及び通話制御処理(図9)を実行する。案内及び通話制御処理では、前記S5〜S7で取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内を行ったり、ナビゲーション装置1及び携帯電話機2を制御する。その後、当該通話支援処理プログラムを終了する。尚、上記S8が通話支援手段の処理に相当する。
【0048】
次に、上記S5の位置関係取得処理のサブ処理について図6に基づき説明する。図6は本実施形態に係る位置関係取得処理のサブ処理プログラムのフローチャートである。
【0049】
位置関係取得処理において、先ずS11でCPU41は、現在位置検出部11により自車の現在位置や進行方向を検出する。また、検出した自車の現在位置を地図上で特定するマップマッチングも行われる。尚、上記S11が車両位置取得手段の処理に相当する。
【0050】
次に、S12においてCPU41は、RAM42から前記S3で特定した制限エリアに関する情報を読み出し、前記S11で取得した自車の現在位置が制限エリア内に位置するか否か判定する。
【0051】
そして、自車の現在位置が制限エリア内に位置すると判定された場合(S12:YES)には、S13へと移行する。それに対して、自車の現在位置が制限エリア外に位置すると判定された場合(S12:NO)には、S14へと移行する。
【0052】
S13においてCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグに「2」を代入する。尚、位置フラグは制限エリアに対する自車の現在位置の位置関係を特定するフラグであり、イグニションがONされた際に行われる初期設定処理で「0」に設定される。
【0053】
また、S14においてCPU41は、RAM42から前記S3で特定した制限エリアに関する情報を読み出し、前記S11で取得した自車の現在位置が制限エリアの開始点から所定距離以内(例えば300m以内)に位置するか否か判定する。
【0054】
そして、自車の現在位置が制限エリアの開始点から所定距離以内に位置すると判定された場合(S14:YES)には、S15へと移行する。それに対して、自車の現在位置が制限エリアの開始点から所定距離以内に位置しないと判定された場合(S14:NO)には、S16へと移行する。
【0055】
S15においてCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグに「1」を代入する。また、S16においてCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグに「0」を代入する。その後、S6へと移行する。
【0056】
次に、上記S6の通話状態取得処理のサブ処理について図7に基づき説明する。図7は本実施形態に係る通話状態取得処理のサブ処理プログラムのフローチャートである。
【0057】
通話状態取得処理において、先ずS21でCPU41は、ナビゲーション装置1及び携帯電話機2から構成される車載ハンズフリーシステムの通話状態を取得する。尚、通話状態は、(1)外部通信装置と通話中である状態、(2)外部通信装置からの発呼に対して着信中である状態、(3)いずれにも該当しない待受中である状態、のいずれかの状態に分類される。また、上記S21が通話状態取得手段の処理に相当する。
【0058】
次に、S22においてCPU41は、前記S21で取得した通話状態が外部通信装置と通話中であるか否か判定する。
【0059】
そして、通話状態が外部通信装置と通話中であると判定された場合(S22:YES)には、S23へと移行する。それに対して、通話状態が外部通信装置と通話中でないと判定された場合(S22:NO)には、S24へと移行する。
【0060】
S23においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグに「2」を代入する。尚、状態フラグはナビゲーション装置1及び携帯電話機2から構成される車載ハンズフリーシステムの通話状態を特定するフラグであり、イグニションがONされた際に行われる初期設定処理で「0」に設定される。
【0061】
また、S24においてCPU41は、前記S21で取得した通話状態が外部通信装置からの発呼に対して着信中であるか否か判定する。
【0062】
そして、通話状態が外部通信装置からの発呼に対して着信中であると判定された場合(S24:YES)には、S25へと移行する。それに対して、通話状態が外部通信装置からの発呼に対して着信中でないと判定された場合(S24:NO)には、S26へと移行する。
【0063】
S25においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグに「1」を代入する。また、S26においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグに「0」を代入する。その後、S7へと移行する。
【0064】
次に、上記S7のユーザ応答取得処理のサブ処理について図8に基づき説明する。図8は本実施形態に係るユーザ応答取得処理のサブ処理プログラムのフローチャートである。
【0065】
ユーザ応答取得処理において、先ずS31でCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグが「1」であるか否か判定する。
【0066】
そして、状態フラグが「1」であると判定された場合(S31:YES)、即ち、外部通信装置からの発呼に対して着信中であると判定された場合には、S32へと移行する。それに対して、状態フラグが「1」でないと判定された場合(S31:NO)には、S35へと移行する。
【0067】
S32においてCPU41は、外部通信装置からの着信に対するユーザの応答態様を取得する。具体的には、発呼先の相手の電話番号、着呼の通知とともに応答許可の確認(例えば、応答許可する場合に押下される応答ボタン)を液晶ディスプレイ15に表示し、ユーザが応答許可を選択したか否かを特定する。
尚、ユーザの応答態様は着信がある度にユーザによって選択された選択結果に基づいて特定される場合に限られない。例えば、予めナビゲーション装置1において着信があった場合に一律に応答することが設定されている場合には、常にユーザが応答するとしてユーザの応答態様を取得する。また、予めナビゲーション装置1において着信があった場合に一律に応答しないことが設定されている場合には、常にユーザが応答しないとしてユーザの応答態様を取得する。
【0068】
次に、S33においてCPU41は、前記S32で取得したユーザの応答態様が外部通信装置からの着信の取り次ぎを許可する態様(即ち、応答許可する態様)であるか否か判定する。
【0069】
そして、ユーザの応答態様が外部通信装置からの着信の取り次ぎを許可する態様であると判定された場合(S33:YES)には、S34へと移行する。それに対して、ユーザの応答態様が外部通信装置からの着信の取り次ぎを許可しない態様であると判定された場合(S33:NO)には、S35へと移行する。
【0070】
S34においてCPU41は、RAM42に記憶された不許可フラグを読み出し、不許可フラグに「1」を代入する。また、S35においてCPU41は、RAM42に記憶された不許可フラグを読み出し、不許可フラグに「0」を代入する。その後、S8へと移行する。尚、不許可フラグはユーザの外部通信装置の発呼に対する応答態様、即ち、着信の取り次ぎを許可するか否かを特定するフラグであり、イグニションがONされた際に行われる初期設定処理で「0」に設定される。
【0071】
次に、上記S8の案内及び通話制御処理のサブ処理について図9に基づき説明する。図9は本実施形態に係る案内及び通話制御処理のサブ処理プログラムのフローチャートである。
【0072】
案内及び通話制御処理において、先ずS41でCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグが「0」であるか否か判定する。
【0073】
そして、位置フラグが「0」であると判定された場合(S41:YES)、即ち、自車が制限エリア外で且つ開始点から所定距離以内でもない安全エリアに位置すると判定された場合には、通話状態にかかわらず自車が安全に走行することが可能であるとし、当該通話支援処理プログラムを終了する。
【0074】
一方、位置フラグが「0」でないと判定された場合(S41:NO)、即ち、自車が制限エリア内又は制限エリアの開始点から所定距離以内(例えば300m以内)に位置すると判定された場合には、S42へと移行する。
【0075】
S42においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグが「0」であるか否か判定する。
【0076】
そして、状態フラグが「0」であると判定された場合(S42:YES)、即ち、外部通信装置と通話中でもなく、外部通信装置の発呼に対して着信中でもないと判定された場合には、当該通話支援処理プログラムを終了する。
【0077】
一方、状態フラグが「0」でないと判定された場合(S42:NO)、即ち、外部通信装置と通話中か、或いは外部通信装置の発呼に対して着信中であると判定された場合には、S43へと移行する。
【0078】
次に、S43でCPU41は、RAM42に記憶された位置フラグを読み出し、位置フラグが「2」であるか否か判定する。
【0079】
そして、位置フラグが「2」であると判定された場合(S43:YES)、即ち、自車が制限エリア内に位置すると判定された場合には、S44へと移行する。それに対して、位置フラグが「2」でないと判定された場合(S43:NO)、即ち、自車が制限エリア開始点から所定距離以内(例えば300m以内)に位置すると判定された場合には、S46へと移行する。尚、上記S41、S43がエリア内判定手段の処理に相当する。
【0080】
S44においてCPU41は、自車の現在位置と走行予定経路とRAM42から読み出した制限エリアと地図情報DB31から読み出した地図情報とに基づいて、自車が現在位置する制限エリアを退出する予想退出時刻を算出する。尚、予想退出時刻の算出には、道路種別(高速道路、有料道路、一般道路)毎に予め設定された平均車速が用いられる。
【0081】
続いて、S45においてCPU41は、自車が現在位置する制限エリアの内容と前記S44で算出した予想退出時刻をユーザに案内する。具体提起には、制限エリアの内容や予想退出時刻を液晶ディスプレイ15に表示したり、スピーカ17から出力する。尚、制限エリアの内容とは、自車が現在位置する制限エリアが前記S3で述べた(a)〜(f)のいずれかの条件に該当する制限エリアであるかを案内するものであり、例えば「この先、進路変更をすべき交差点が多くあります。」、「この先、カーブが多くあります。」等がある。
【0082】
ここで、図10は前記S45においてナビゲーション装置1の液晶ディスプレイ15に表示される案内画面を示した図である。
図10に示すように、液晶ディスプレイ15には自車周辺の地図画像とともに、制限エリアの内容や予想退出時刻を案内するメッセージウィンドウ71が表示される。例えば、図10に示すメッセージウィンドウ71では、自車が進路変更をすべき交差点が多い制限エリアに位置すること、及び予想退出時刻が8:27であることをユーザに案内する。
そして、CPU41は前記S45の案内処理を行った後、S48へと移行する。尚、案内を行う回数や時間に制限を設けるようにしても良い。
また、外部通信装置と通話中に制限エリアへと進入した場合と、外部通信装置からの発呼の着信中に制限エリアへと進入した場合とで、案内処理の内容を変更しても良い。例えば、外部通信装置と通話中に制限エリアへと進入した場合には、通信相手先からの音声出力に対して案内音声を割り込ませてスピーカ17や図示しないイヤホンから出力する。また、外部通信装置からの発呼の着信中に制限エリアへと進入した場合には、液晶ディスプレイ15に案内内容を出力する。
【0083】
一方、S46においてCPU41は、自車の現在位置と走行予定経路とRAM42から読み出した制限エリアと地図情報DB31から読み出した地図情報とに基づいて、自車の進行方向前方に位置する制限エリアに進入する予想進入時刻と退出する予想退出時刻を算出する。尚、予想進入時刻及び予想退出時刻の算出には、道路種別(高速道路、有料道路、一般道路)毎に予め設定された平均車速が用いられる。また、上記S44、46が退出予定時刻算出手段の処理に相当する。
【0084】
続いて、S47においてCPU41は、自車の進行方向前方にある制限エリアの内容と前記S46で算出した予想進入時刻及び予想退出時刻をユーザに案内する。具体的には、制限エリアの内容、予想退出時刻及び予想進入時刻を液晶ディスプレイ15に表示したり、スピーカ17から出力する(図10参照)。その後、S48へと移行する。尚、案内を行う回数や時間に制限を設けるようにしても良い。
【0085】
S48においてCPU41は、RAM42に記憶された状態フラグを読み出し、状態フラグが「1」であるか否か判定する。
【0086】
そして、状態フラグが「1」であると判定された場合(S48:YES)、即ち、外部通信装置の発呼に対して着信中であると判定された場合には、S49へと移行する。一方、状態フラグが「1」でないと判定された場合(S48:NO)、即ち、外部通信装置と通話中であると判定された場合には、S51へと移行する。
【0087】
また、S49においてCPU41は、RAM42に記憶された不許可フラグを読み出し、不許可フラグが「1」であるか否か判定する。
【0088】
そして、不許可フラグが「1」であると判定された場合(S49:YES)、即ち、外部通信装置からの発呼に対してユーザが着信の取り次ぎを許可する場合には、S50へと移行する。一方、不許可フラグが「1」でないと判定された場合(S49:NO)、外部通信装置の発呼に対してユーザが着信の取り次ぎを許可しない場合には、着信を行わずに当該通話支援処理プログラムを終了する。
【0089】
S50においてCPU41は、着信に対して自動で取り次ぎを実行し、通信を確立する。そして、予想退出時刻(即ち、自車が制限エリアを抜けて通話可能となる時刻)を案内する音声メッセージを携帯電話機2を介して発呼側の外部通信装置に対して送信する。音声メッセージを送信した後、携帯電話機2に回線切断の指示を送信し、回線を切断する。それによって、着信に対する応答に係るユーザの負担を軽減するとともに、発呼元の相手に対して通話を適切に行うことができるタイミングを案内することが可能となる。
【0090】
また、S51においてCPU41は、前記S44又はS46で算出された制限エリアの予想退出時間に基づいて、制限エリアを退出するまでの時間が所定時間(例えば5分)以上であるか否か判定する。
【0091】
そして、制限エリアを退出するまでの時間が所定時間(例えば5分)以上であると判定された場合(S51:YES)には、S52へと移行する。一方、制限エリアを退出するまでの時間が所定時間未満であると判定された場合(S51:NO)には、通話の制限は行わずに、継続して通話を行わせる。
【0092】
S52においてCPU41は、通話中の回線に対して自動で応答割り込みを行う。そして、予想退出時刻(即ち、自車が制限エリアを抜けて通話可能となる時刻)を案内する音声メッセージを携帯電話機2を介して発呼側の外部通信装置に対して送信する。音声メッセージを送信した後、携帯電話機2に回線切断の指示を送信し、回線を切断する。それによって、通話に係るユーザの負担を軽減するとともに、発呼元の相手に対して通話を適切に行うことができるタイミングを案内することが可能となる。
【0093】
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1、ナビゲーション装置1による運転支援方法及びナビゲーション装置1で実行されるコンピュータプログラムでは、自車の走行予定経路を取得し(S2)、走行予定経路上にあるハンズフリー通信を制限すべき制限エリアを特定し(S3)、自車の現在位置と制限エリアとの位置関係を取得し(S5)、車載ハンズフリーシステムにおける通話状態を取得し(S6)、着信に対するユーザ応答態様を取得し(S7)、取得した制限エリアと自車の位置関係、車載ハンズフリーシステムにおける通話状態及びユーザの応答態様に基づいて、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2の制御を行う(S8)ので、通信装置の通話状態を考慮することによって、車両で行われるハンズフリー通話等の通話機能を制限エリアと車両との位置関係に基づいて適切に支援することが可能となる。それにより、車両走行中の安全性を確保することができる。
また、通話に対する支援として制限エリアに関する案内を行う(S45、S47)ので、車両走行中の通話を控えるべきタイミングをユーザに把握させることが可能となる。
また、通話に対する支援として自動応答、メッセージ送信、自動切断等のハンズフリーシステムの制御を行う(S50、S52)ので、外部通信装置との通話や着信の応答に係るユーザの負担を軽減し、車両走行中の安全性を確保することができる。
また、車両が制限エリア内に位置する場合であって、外部通信装置からの着信があった場合に、車両が制限エリアを退出する退出予定時刻を外部通信装置からの着信に対して応答する(S50)ので、発呼元の相手に対して今後に通話を適切に行うことができるタイミングを案内することが可能となる。
【0094】
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態では走行予定経路中にある制限エリアを特定する際に、前記S3で述べた(a)〜(f)のようなエリアを制限エリアとして特定しているが、(a)〜(f)以外の条件を設けても良い。例えば、道路幅が所定幅以下である道路を走行するエリアについても制限エリアとして特定しても良い。
【0095】
また、本実施形態では携帯電話機2をハンズフリーユニットを内蔵したナビゲーション装置1に接続することにより車載ハンズフリーシステムを構成しているが、携帯電話機2を専用のハンズフリーユニットに接続することにより車載ハンズフリーシステムを構成しても良い。その場合には、ハンズフリーユニットが本願発明の運転支援装置に相当する。
【0096】
また、本実施形態では自車が制限エリア内に位置する場合に加えて、制限エリアの開始点から所定距離以内(例えば300m以内)に位置する場合にも、制限エリアに関する案内やナビゲーション装置1及び携帯電話機2の制御を行っているが、自車が制限エリア内に位置する場合のみに制限エリアに関する案内やナビゲーション装置1及び携帯電話機2の制御を行う構成としても良い。
【図面の簡単な説明】
【0097】
【図1】本実施形態に係るナビゲーション装置1を示したブロック図である。
【図2】本実施形態に係る通話支援処理プログラムのフローチャートである。
【図3】制限エリアの一例を示した図である。
【図4】制限エリアの一例を示した図である。
【図5】制限エリアの一例を示した図である。
【図6】本実施形態に係る位置関係取得処理のサブ処理プログラムのフローチャートである。
【図7】本実施形態に係る通話状態取得処理のサブ処理プログラムのフローチャートである。
【図8】本実施形態に係るユーザ応答取得処理のサブ処理プログラムのフローチャートである。
【図9】本実施形態に係る案内及び通話制御処理のサブ処理プログラムのフローチャートである。
【図10】制限エリアと予想退出時刻を案内する案内画面を示した図である。
【符号の説明】
【0098】
1 ナビゲーション装置
2 携帯電話機
13 ナビゲーションECU
41 CPU
42 RAM
43 ROM
【特許請求の範囲】
【請求項1】
外部通信装置との通話機能を備えた車載通信装置の通信機能を制限すべき制限エリアを特定する制限エリア特定手段と、
前記車両の現在位置を取得する車両位置取得手段と、
前記車載通信装置の通話状態を取得する通話状態取得手段と、
前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援手段と、を有することを特徴とする運転支援装置。
【請求項2】
前記通話支援手段は、前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置を制御することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記車両が前記制限エリア取得手段によって取得された前記制限エリア内に位置するか否かを判定するエリア内判定手段を有し、
前記通話支援手段は、前記エリア内判定手段により前記車両が前記制限エリア内に位置すると判定された場合であって、且つ外部通信装置から前記車両に搭載された車載通信装置への着信があった場合に、その着信に対する応答を制御することを特徴とする請求項2に記載の運転支援装置。
【請求項4】
前記通話支援手段は、
前記エリア内判定手段により前記車両が前記制限エリア内に位置すると判定された場合に、車両が制限エリアを退出する退出予定時刻を算出する退出予定時刻算出手段を備え、
前記外部通信装置に対して前記退出予定時刻を応答することを特徴とする請求項3に記載の運転支援装置。
【請求項5】
前記通話支援手段は、前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記制限エリアに関する案内を行うことを特徴とする請求項1に記載の運転支援装置。
【請求項6】
外部通信装置との通話機能を備えた車載通信装置の通信機能を制限すべき制限エリアを特定する制限エリア特定ステップと、
前記車両の現在位置を取得する車両位置取得ステップと、
前記車載通信装置の通話状態を取得する通話状態取得ステップと、
前記制限エリア特定ステップにおいて特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援ステップと、を有することを特徴とする運転支援方法。
【請求項7】
コンピュータに搭載され、
車両に搭載され外部通信装置との通話機能を備えた車載通信装置の通信機能を制限すべき制限エリアを特定する制限エリア特定機能と、
前記車両の現在位置を取得する車両位置取得機能と、
前記車載通信装置の通話状態を取得する通話状態取得機能と、
前記制限エリア特定機能において特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援機能と、
を実行させることを特徴とするコンピュータプログラム。
【請求項1】
外部通信装置との通話機能を備えた車載通信装置の通信機能を制限すべき制限エリアを特定する制限エリア特定手段と、
前記車両の現在位置を取得する車両位置取得手段と、
前記車載通信装置の通話状態を取得する通話状態取得手段と、
前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援手段と、を有することを特徴とする運転支援装置。
【請求項2】
前記通話支援手段は、前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置を制御することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記車両が前記制限エリア取得手段によって取得された前記制限エリア内に位置するか否かを判定するエリア内判定手段を有し、
前記通話支援手段は、前記エリア内判定手段により前記車両が前記制限エリア内に位置すると判定された場合であって、且つ外部通信装置から前記車両に搭載された車載通信装置への着信があった場合に、その着信に対する応答を制御することを特徴とする請求項2に記載の運転支援装置。
【請求項4】
前記通話支援手段は、
前記エリア内判定手段により前記車両が前記制限エリア内に位置すると判定された場合に、車両が制限エリアを退出する退出予定時刻を算出する退出予定時刻算出手段を備え、
前記外部通信装置に対して前記退出予定時刻を応答することを特徴とする請求項3に記載の運転支援装置。
【請求項5】
前記通話支援手段は、前記制限エリア特定手段によって特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記制限エリアに関する案内を行うことを特徴とする請求項1に記載の運転支援装置。
【請求項6】
外部通信装置との通話機能を備えた車載通信装置の通信機能を制限すべき制限エリアを特定する制限エリア特定ステップと、
前記車両の現在位置を取得する車両位置取得ステップと、
前記車載通信装置の通話状態を取得する通話状態取得ステップと、
前記制限エリア特定ステップにおいて特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援ステップと、を有することを特徴とする運転支援方法。
【請求項7】
コンピュータに搭載され、
車両に搭載され外部通信装置との通話機能を備えた車載通信装置の通信機能を制限すべき制限エリアを特定する制限エリア特定機能と、
前記車両の現在位置を取得する車両位置取得機能と、
前記車載通信装置の通話状態を取得する通話状態取得機能と、
前記制限エリア特定機能において特定された前記制限エリアと前記車両の現在位置との位置関係と前記車載通信装置の通話状態とに基づいて、前記車載通信装置による通話に対する支援を行う通話支援機能と、
を実行させることを特徴とするコンピュータプログラム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−38630(P2010−38630A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−199658(P2008−199658)
【出願日】平成20年8月1日(2008.8.1)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月1日(2008.8.1)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]