
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車両がUターンを行ったことを正確に判定することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(横加速度許容値)を設定し、設定された横加速度許容値や幅員曲率半径に基づいて“車両が道路でUターンする為の上限速度”を設定し、車両が一方通行区間の走行中にUターン可能な旋回を行った場合であって、その時の旋回速度が“車両が道路でUターンする為の上限速度”以下である場合に車両がUターンを行ったと判定するとともに、車両がUターンを行ったことによって逆走状態にあると認定し、車両が逆走していることを警告するように構成する。
【解決手段】車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(横加速度許容値)を設定し、設定された横加速度許容値や幅員曲率半径に基づいて“車両が道路でUターンする為の上限速度”を設定し、車両が一方通行区間の走行中にUターン可能な旋回を行った場合であって、その時の旋回速度が“車両が道路でUターンする為の上限速度”以下である場合に車両がUターンを行ったと判定するとともに、車両がUターンを行ったことによって逆走状態にあると認定し、車両が逆走していることを警告するように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置、運転支援方法及びコンピュータプログラムに関する。
【背景技術】
【0002】
道路幅の狭い一般道に加えて、高速自動車道路、都市高速道路、自動車専用道路、一般有料道路、国道等の高速走行が可能な一部の道路では、進行方向毎に道路が区分され、予め決められた方向のみに車両が走行可能に構成されている区間がある。しかしながら、明確に進行方向が明示されていない場合には、車両が進行方向を間違えて走行区間に規定されている進行方向と逆方向に走行する所謂逆走状態となる場合がある。そして、車両がそのような逆走状態となる原因の一つとして以下の事例がある。
【0003】
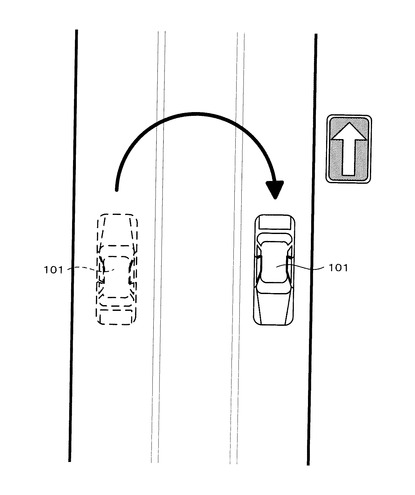
例えば、図6に示すように、複数の車線からなる一方通行区間の道路を車両101が走行する場合では、運転者が右側の車線は対向車線であると誤認識する場合がある。その場合に、車両101が対向車線を走行するつもりでUターンし、右側の車線を走行した結果、その車両は道路に定められている進行方向と逆方向を走行することとなり、逆走状態となる。
【0004】
従って、車両が上記逆走状態となった場合に逆走を迅速に中止させる為には、車両側で車両がUターンを行ったことを正確に把握することが重要である。それによって、運転者に警告を行ったり、車両制御を行うことにより、逆走を止めさせることが可能となる。そこで、例えば特開2008−96141号公報では、車両が旋回を行ったことを検出した場合に、行われた旋回の旋回曲率半径と、道路幅に基づいて算出される幅員曲率半径とを比較し、旋回曲率半径が幅員曲率半径よりも小さい場合に、車両がUターンを行ったと判定する技術について記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−96141号公報(第6−7頁、図3)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1の記載の技術では、車両がUターンを行ったことを正確に判定できない場合があった。例えば、道路幅が比較的広い道路において障害物を回避する為に急旋回を行った場合等には、旋回曲率半径が幅員曲率半径よりも小さくなり、車両がUターンを行っていないにもかかわらず、車両がUターンを行ったと誤った判定がされてしまう場合がある。そして、そのような場合において逆走に対する警告を行うことは、運転者の運転操作を妨げるとともに、現在の車両の進行方向を混乱させてしまう虞があった。
【0007】
本発明は前記従来における問題点を解消するためになされたものであり、車両がUターンを行ったことを正確に判定することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため本願の請求項1に係る運転支援装置(1)は、車両が走行する道路の道路幅を取得する道路幅取得手段(42)と、前記道路幅取得手段によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定手段(43)と、前記車両の挙動を取得する車両挙動取得手段(44)と、前記道路幅取得手段によって取得された前記道路幅と前記車両挙動取得手段により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定手段(45)と、を有することを特徴とする。
尚、「前記車両において前記道路でUターンすることが可能な条件を満たす旋回」は、旋回方向、旋回曲率半径、旋回角度、周辺の道路状況等が一定の条件を満たす旋回をいう。
【0009】
また、請求項2に係る運転支援装置(1)は、請求項1に記載の運転支援装置において、前記上限速度設定手段(43)は、前記車両が前記道路でUターンした場合に前記車両に生じる横方向の加速度が所定加速度以下となる速度の上限を上限速度として設定することを特徴とする。
【0010】
また、請求項3に係る運転支援装置(1)は、請求項1又は請求項2に記載の運転支援装置において、前記車両が走行する前記道路が一方通行区間であって、前記Uターン判定手段(45)により前記車両が前記道路でUターンを行ったと判定された場合に、前記車両が逆走していることを警告する警告手段(46)を有することを特徴とする。
【0011】
また、請求項4に係る運転支援方法は、車両が走行する道路の道路幅を取得する道路幅取得ステップと、前記道路幅取得ステップによって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定ステップと、前記車両の挙動を取得する車両挙動取得ステップと、前記道路幅取得ステップによって取得された前記道路幅と前記車両挙動取得ステップにより取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定ステップと、を有することを特徴とする。
【0012】
更に、請求項5に係るコンピュータプログラムは、コンピュータに搭載され、車両が走行する道路の道路幅を取得する道路幅取得機能と、前記道路幅取得機能によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定機能と、前記車両の挙動を取得する車両挙動取得機能と、前記道路幅取得機能によって取得された前記道路幅と前記車両挙動取得機能により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定機能と、を有することを特徴とする。
【発明の効果】
【0013】
前記構成を有する請求項1に記載の運転支援装置によれば、車両が道路でUターンする為の上限速度を設定するとともに、設定された上限速度に基づいて車両がUターンを行ったか否かを判定するので、車両がUターンを行ったことを正確に判定することが可能となる。その結果、車両が逆走状態となったことを正確且つ迅速に把握することが可能となり、例えば、運転者に警告を行ったり、車両制御を行うことによって、逆走を中止させることが可能となる。
【0014】
また、請求項2に記載の運転支援装置によれば、Uターン時の乗員にかかる負担や安全面を考慮することによって、車両がUターンを行ったことを正確に判定することが可能となる。
【0015】
また、請求項3に記載の運転支援装置によれば、車両が一方通行区間を走行中にUターンを行ったと判定された場合に、車両が逆走していることを警告するので、車両がUターンを行うことによって逆走状態となった場合に、迅速に逆走を中止させることが可能となる。
【0016】
また、請求項4に記載の運転支援方法によれば、車両が道路でUターンする為の上限速度を設定するとともに、設定された上限速度に基づいて車両がUターンを行ったか否かを判定するので、車両がUターンを行ったことを正確に判定することが可能となる。その結果、車両が逆走状態となったことを正確且つ迅速に把握することが可能となり、例えば、運転者に警告を行ったり、車両制御を行うことによって、逆走を中止させることが可能となる。
【0017】
更に、請求項5に記載のコンピュータプログラムによれば、車両が道路でUターンする為の上限速度を設定させるとともに、設定させた上限速度に基づいて車両がUターンを行ったか否かを判定させるので、車両がUターンを行ったことを正確に判定させることが可能となる。その結果、車両が逆走状態となったことを正確且つ迅速に把握することが可能となり、例えば、運転者に警告を行ったり、車両制御を行うことによって、逆走を中止させることが可能となる。
【図面の簡単な説明】
【0018】
【図1】本実施形態に係るナビゲーション装置を示したブロック図である。
【図2】ナビゲーションECUの構成を示した図である。
【図3】本実施形態に係る逆走警告処理プログラムのフローチャートである。
【図4】Uターン検出処理のサブ処理プログラムのフローチャートである。
【図5】旋回時の車両の横方向に生じる加速度を旋回曲率半径毎に示した図である。
【図6】車両がUターンすることによって逆走状態となる例を示した図である。
【発明を実施するための形態】
【0019】
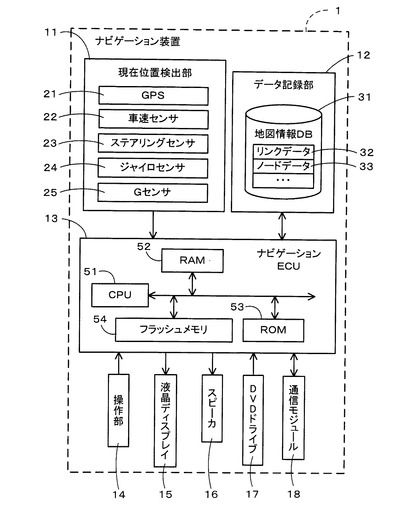
以下、本発明に係る運転支援装置についてナビゲーション装置に具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
【0020】
図1に示すように本実施形態に係るナビゲーション装置1は、車両の現在位置を検出する現在位置検出部11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU13と、ユーザからの操作を受け付ける操作部14と、ユーザに対して地図や目的地までの案内経路を表示する液晶ディスプレイ15と、経路案内に関する音声ガイダンスを出力するスピーカ16と、プログラムを記憶した記憶媒体であるDVDを読み取るDVDドライブ17と、交通情報センタ等の情報センタとの間で通信を行う通信モジュール18と、から構成されている。
【0021】
以下に、ナビゲーション装置1を構成する各構成要素について順に説明する。
現在位置検出部11は、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24、Gセンサ25、高度計(図示せず)等からなり、現在の車両の位置、方位、車両の走行速度等を検出することが可能となっている。ここで、特に車速センサ22は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。尚、上記5種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
【0022】
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31や所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。
【0023】
ここで、地図情報DB31は、経路案内、交通情報案内及び地図表示に必要な各種地図データが記録されている。
また、地図データは、具体的には、道路(リンク)形状に関するリンクデータ32、ノード点に関するノードデータ33、施設等の地点に関する情報であるPOIデータ、各交差点に関する交差点データ、経路を探索するための探索データ、地点を検索するための検索データ、地図、道路、交通情報等の画像を液晶ディスプレイ15に描画するための画像描画データ等から構成されている。特にリンクデータ32としては、リンクの道路種別(高速自動車道路、都市高速道路、自動車専用道路、一般有料道路、取付道路、一般道路)に関する情報や、道路幅に関する情報、一方通行区間の設定有無に関する情報等が記憶される。
尚、地図情報DB31は、地図配信センタ等から配信される更新データや記憶媒体(例えば、DVDやメモリーカード)を介して提供される更新データに基づいて更新される。
【0024】
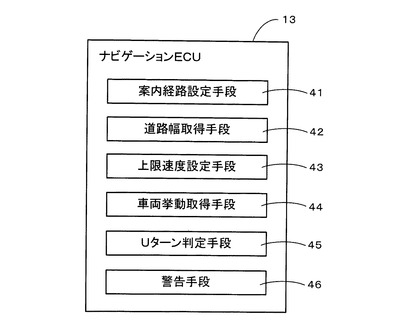
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)13は、図2に示すように目的地が選択された場合に出発地から目的地までの案内経路を設定する案内経路設定手段41、車両が走行する道路の道路幅を取得する道路幅取得手段42、取得された道路幅に基づいて車両が道路でUターンする為の上限速度を設定する上限速度設定手段43、車両の挙動を取得する車両挙動取得手段44、取得された道路幅及び車両の挙動に基づいて車両において道路でUターンすることが可能な条件を満たす旋回が上限速度以下で行われた場合に、車両が道路でUターンを行ったと判定するUターン判定手段45、車両が走行する道路が一方通行区間であって、Uターン判定手段により車両が道路でUターンを行ったと判定された場合に、車両が逆走していることを警告する警告手段46等を構成し、ナビゲーション装置1の全体の制御を行う電子制御ユニットである。そして、演算装置及び制御装置としてのCPU51、並びにCPU51が各種の演算処理を行うにあたってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM52、制御用のプログラムのほか、後述の逆走警告処理プログラム(図3参照)等が記録されたROM53、ROM53から読み出したプログラムを記憶するフラッシュメモリ54等の内部記憶装置を備えている。
【0025】
操作部14は、走行開始地点としての出発地及び走行終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)から構成される。そして、ナビゲーションECU13は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、液晶ディスプレイ15の前面に設けたタッチパネルによって構成することもできる。
【0026】
また、液晶ディスプレイ15には、道路を含む地図画像、交通情報、操作案内、操作メニュー、キーの案内、出発地から目的地までの案内経路、案内経路に沿った案内情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。また、車両が一方通行区間の走行中にUターンを行ったと判定された場合には、逆走状態になったと推定し、逆走に対する警告を表示する。
【0027】
また、スピーカ16は、ナビゲーションECU13からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスや、交通情報の案内を出力する。また、車両が一方通行区間の走行中にUターンを行ったと判定された場合には、逆走状態になったと推定し、逆走に対する警告音声を出力する。
【0028】
また、DVDドライブ17は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて地図情報DB31の更新等が行われる。
【0029】
また、通信モジュール18は、交通情報センタ、例えば、VICS(登録商標:Vehicle Information and Communication System)センタやプローブセンタ等から送信された渋滞情報、規制情報、交通事故情報等の各情報から成る交通情報を受信する為の通信装置であり、例えば携帯電話機やDCMが該当する。
【0030】
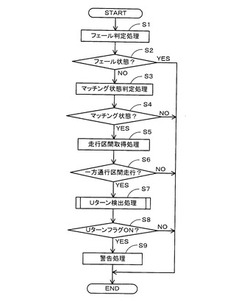
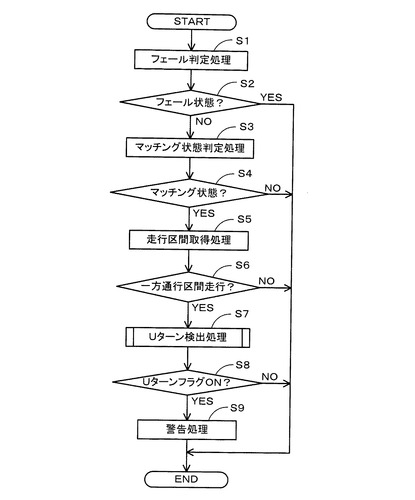
続いて、前記構成を有するナビゲーション装置1において実行する逆走警告処理プログラムについて図3に基づき説明する。図3は本実施形態に係る逆走警告処理プログラムのフローチャートである。ここで、逆走警告処理プログラムは車両のACCがONされた後に実行され、車両が一方通行区間の走行中にUターンを行ったか否かを判定し、その判定結果に基づいて逆走に対する警告を行うプログラムである。尚、以下の図3及び図4にフローチャートで示されるプログラムは、ナビゲーションECU13が備えているRAM52、ROM53等に記憶されており、CPU51により実行される。
【0031】
逆走警告処理プログラムでは、先ずステップ(以下、Sと略記する)1において、CPU51は、フェール判定処理を行う。フェール判定処理では、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24、Gセンサ25等の各種機器が正常に作動しているか否かの判定を行う。
【0032】
そして、前記S1の処理においてフェール状態であると判定された場合(S2:YES)には、当該逆走警告処理プログラムを終了する。それに対して、フェール状態でないと判定された場合(S2:NO)には、S3へと移行する。
【0033】
S3においてCPU51は、マッチング状態判定処理を行う。マッチング状態判定処理では、マップマッチング処理によって車両の現在位置が正しく地図のリンク上に特定されている状態(マッチング状態)にあるか否かの判定を行う。尚、車両の現在位置をリンク上に特定する際には、GPS21に加えてGセンサ25も用いる。具体的には、上下方向に道路が重複して設置されている場合には、Gセンサ25により車両に生じた加速度を検出することによって、いずれの道路を走行しているかを特定する。
【0034】
そして、前記S3の処理においてマッチング状態にあると判定された場合(S4:YES)には、S5へと移行する。それに対して、マッチング状態にないと判定された場合(S4:NO)には、当該逆走警告処理プログラムを終了する。
【0035】
S5においてCPU51は、車両の走行する道路の走行区間に関する情報(道路種別、規制情報等)を地図情報DB31から取得する。具体的には、車両の現在走行するリンクを特定し、該リンクのリンクデータ32を地図情報DB31から取得することにより行う。
【0036】
続いて、S6においてCPU51は、前記S5で取得した情報に基づいて車両が走行する区間が一方通行区間であるか否か判定する。具体的には、車両の現在走行するリンクのリンクデータ32に基づいて判定する。尚、一方通行区間とは予め決められた方向のみに車両が走行可能に構成されている区間であり、道路幅の狭い一般道の他、高速自動車道路、都市高速道路、自動車専用道路、一般有料道路、国道等の高速走行が可能な一部の道路においても設定されている。
【0037】
そして、車両が走行する区間が一方通行区間であると判定された場合(S6:YES)には、S7へと移行する。それに対して、車両が走行する区間が一方通行区間でないと判定された場合(S6:NO)には、当該逆走警告処理プログラムを終了する。
【0038】
S7においてCPU51は、後述のUターン検出処理(図4)を行う。尚、Uターン検出処理は、車両においてUターンが行われた場合に車両がUターンを行ったことを検出する処理である。また、Uターン検出処理では、後述のように車両がUターンを行ったことが検出された場合にはRAM52に記憶されているUターンフラグがONされる。
【0039】
次に、S8においてCPU51は、RAM52に記憶されているUターンフラグを読み出し、UターンフラグがONであるか否か、即ち、車両がUターンを行ったか否かを判定する。尚、Uターンフラグは初期状態ではOFFに設定される。
【0040】
そして、UターンフラグがONである、即ち、車両がUターンを行ったと判定された場合(S8:YES)には、車両がUターンを行ったことによって逆走状態(道路に設定されている進行方向と逆方向に走行する状態)にあると推定し、S9へと移行する。一方、UターンフラグがOFFである、即ち、車両がUターンを行っていないと判定された場合(S8:NO)には、逆走状態にないと推定し、警告を行うことなく当該逆走警告処理プログラムを終了する。
【0041】
S9においてCPU51は、車両が逆走していることを警告する警告処理を行う。具体的には、液晶ディスプレイ15に対して「現在、道路を逆走していますので注意して下さい。」とのメッセージを表示したり、同内容の音声をスピーカ16から出力する。
【0042】
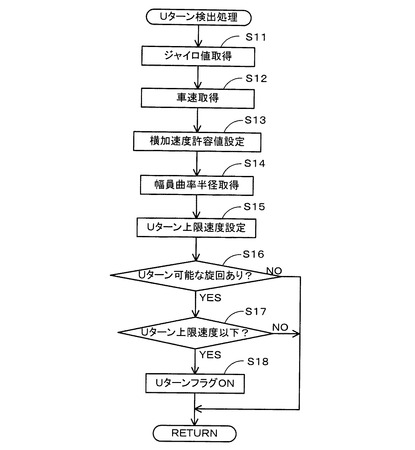
次に、上記S7のUターン検出処理のサブ処理について図4に基づき説明する。図4は逆走検出処理のサブ処理プログラムのフローチャートである。
【0043】
先ず、S11においてCPU51は、ジャイロセンサ24により検出された検出値を取得する。尚、取得した検出値は後述のS16で車両においてUターン可能な旋回が行われたか否か判定する際に用いられる。
【0044】
次に、S12においてCPU51は、車速センサ22の検出結果に基づいて現在の車両の車速を取得する。
【0045】
続いて、S13においてCPU51は、車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(以下、横加速度許容値という)を設定する。
ここで、車両が旋回すると遠心力によって車両には横方向に加速度が生じる。この横方向の加速度は、旋回時の車速が速い程及び旋回曲率半径が小さい程大きくなる。また、横方向の加速度が大きくなり過ぎると、乗員に負担が生じ、また、スリップの原因にもなる。従って、車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行う為には、車両の横方向に生じる加速度は所定値以下である必要があり、この所定値を横加速度許容値とする。
尚、本実施形態では横加速度許容値は0.8G[9.81kg.m/sec2]とする。また、横加速度許容値は車種、天候、乗員の数、年齢、過去のUターン時に生じた横方向の加速度等に応じて設定しても良い。
【0046】
次に、S14においてCPU51は、幅員曲率半径を取得する。尚、幅員曲率半径は、車両が現在走行する道路でUターンを行うことが可能な最大の旋回曲率半径であり、道路幅の1/2となる。具体的には、車両が現在走行する道路幅を地図情報DB31から取得して、取得した道路幅の半分の長さを算出することにより幅員曲率半径を取得する。
【0047】
続いて、S15においてCPU51は、前記S13で取得した横加速度許容値と前記S14で取得した幅員曲率半径とに基づいて、“車両が道路でUターンする為の上限速度”を設定する。ここで、“車両が道路でUターンする為の上限速度”は、車両が現在走行する道路でUターンした場合に、乗員に負担がかかることなく安全にUターンを行うことが可能な速度の上限であり、具体的には、車両が前記S14で取得した幅員曲率半径で旋回した場合に、車両に生じる横方向の加速度が前記S13で取得した横加速度許容値以下となる速度の上限値となる。
【0048】
以下に、上記S15の“車両が道路でUターンする為の上限速度”の設定処理の詳細について説明する。
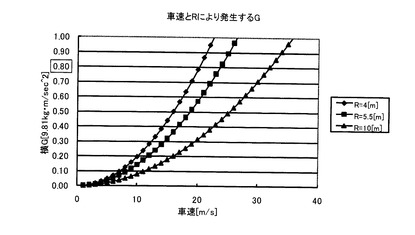
旋回時に車両に生じる横方向の加速度をk、旋回時の車速をV、旋回曲率半径をR、重力加速度をgとすると、旋回時に車両に生じる横方向の加速度kは以下の式(1)で示される。
k=V2/(R×g)・・・・(1)
そして、図5は、旋回曲率半径Rを4m、5.5m、10mとした場合において、車速Vに対する旋回時に車両に生じる横方向の加速度kの変化をそれぞれ示した図である。
【0049】
図5に示すように、旋回時に車両に生じる横方向の加速度は、旋回時の車速が速い程及び旋回曲率半径が小さい程大きくなる。そして、横加速度許容値を0.8Gとすると、“車両が道路でUターンする為の上限速度Vmax”は以下の式(2)で示される。
Vmax=√(0.8×R×g)・・・・(2)
そして、前記S15では上記式(2)に基づいて、“車両が道路でUターンする為の上限速度”が算出され、設定される。例えば、幅員曲率半径が4mの道路では、“車両が道路でUターンする為の上限速度”は20.2km/hとなる。また、幅員曲率半径が5.5mの道路では、“車両が道路でUターンする為の上限速度”は23.7km/hとなる。また、幅員曲率半径が10mの道路では、“車両が道路でUターンする為の上限速度”は31.9km/hとなる。
【0050】
次に、S16においてCPU51は、車両においてUターンすることが可能な条件を満たす旋回が行われたか否か判定する。ここで、Uターンすることが可能な条件を満たす旋回とは、旋回方向や旋回曲率半径が条件を満たす旋回であり、例えば、右方向の旋回であって、旋回曲率半径が幅員曲率半径よりも小さい旋回とする。尚、旋回方向や旋回曲率半径については前記S1で取得したジャイロセンサ24の検出値を用いて算出する。尚、旋回方向や旋回曲率半径に加えて又は代わりに、旋回角度や周辺の道路状況等を用いて判定しても良い。
【0051】
そして、車両においてUターン可能な旋回が行われたと判定された場合(S16:YES)には、S17へと移行する。それに対して、車両においてUターン可能な旋回が行われていないと判定された場合(S16:NO)には、車両がUターンを行っていないと判定し、当該Uターン検出処理のサブ処理プログラムを終了し、S8へと移行する。
【0052】
S17においてCPU51は、前記S12で取得された現在の車両の車速(即ち、車両の旋回速度)が前記S15で設定した“車両が道路でUターンする為の上限速度”以下であるか否か判定する。
【0053】
そして、車両の旋回速度が“車両が道路でUターンする為の上限速度”以下であると判定された場合(S17:YES)には、車両がUターンを行ったと判定し、S18へと移行する。それに対して、車両の旋回速度が“車両が道路でUターンする為の上限速度”より速いと判定された場合(S17:NO)には、車両では障害物を回避する為の急旋回やスピンが行われたのであり、Uターンは行っていないと判定し、当該Uターン検出処理のサブ処理プログラムを終了し、S8へと移行する。
即ち、車両において道路でUターンすることが可能な条件を満たす旋回が上限速度以下で行われたか否かを判定することにより、車両が道路でUターンを行ったか否かを判定することとなる。そして、車両において道路でUターンすることが可能な条件を満たす旋回が上限速度以下で行われたと判定された場合に、車両が道路でUターンを行ったと判定する。
【0054】
S18においてCPU51は、RAM52からUターンフラグを読み出し、UターンフラグをONに設定する。その後、S8へと移行する。その後、車両が逆走していることを警告する警告処理を行う(S9)。
【0055】
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1では、車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(横加速度許容値)を設定し(S13)、設定された横加速度許容値や幅員曲率半径に基づいて“車両が道路でUターンする為の上限速度”を設定し(S14)、車両が一方通行区間の走行中にUターン可能な旋回を行った場合であって、その時の旋回速度が“車両が道路でUターンする為の上限速度”以下である場合に車両がUターンを行ったと判定するとともに、車両がUターンを行ったことによって逆走状態にあると認定し、車両が逆走していることを警告する(S9)ので、車両がUターンを行ったことを正確に判定することが可能となる。また、車両がUターンを行うことによって逆走状態となった場合に、迅速に逆走を中止させることが可能となる。
また、車両が道路でUターンした場合に車両に生じる横方向の加速度が所定加速度以下となる速度の上限を上限速度として設定するので、Uターン時の乗員にかかる負担や安全面を考慮することによって車両がUターンを行ったことを正確に判定することが可能となる。
【0056】
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態では“車両が道路でUターンする為の上限速度”を、車両が前記S14で取得した幅員曲率半径で旋回した場合に、車両に生じる横方向の加速度が前記S13で取得した横加速度許容値以下となる速度の上限値としているが、幅員曲率半径でなく車両の最小旋回曲率半径としても良い。また、実際に車両が旋回した旋回曲率半径を検出し、検出した旋回曲率半径としても良い。
【0057】
また、本実施形態では横加速度許容値は0.8G[9.81kg.m/sec2]としているが、他の値であっても良い。また、横加速度許容値は車種、天候、乗員の数、年齢、過去のUターン時に生じた横方向の加速度などに応じて変更しても良い。
【符号の説明】
【0058】
1 ナビゲーション装置
13 ナビゲーションECU
51 CPU
52 ROM
53 RAM
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置、運転支援方法及びコンピュータプログラムに関する。
【背景技術】
【0002】
道路幅の狭い一般道に加えて、高速自動車道路、都市高速道路、自動車専用道路、一般有料道路、国道等の高速走行が可能な一部の道路では、進行方向毎に道路が区分され、予め決められた方向のみに車両が走行可能に構成されている区間がある。しかしながら、明確に進行方向が明示されていない場合には、車両が進行方向を間違えて走行区間に規定されている進行方向と逆方向に走行する所謂逆走状態となる場合がある。そして、車両がそのような逆走状態となる原因の一つとして以下の事例がある。
【0003】
例えば、図6に示すように、複数の車線からなる一方通行区間の道路を車両101が走行する場合では、運転者が右側の車線は対向車線であると誤認識する場合がある。その場合に、車両101が対向車線を走行するつもりでUターンし、右側の車線を走行した結果、その車両は道路に定められている進行方向と逆方向を走行することとなり、逆走状態となる。
【0004】
従って、車両が上記逆走状態となった場合に逆走を迅速に中止させる為には、車両側で車両がUターンを行ったことを正確に把握することが重要である。それによって、運転者に警告を行ったり、車両制御を行うことにより、逆走を止めさせることが可能となる。そこで、例えば特開2008−96141号公報では、車両が旋回を行ったことを検出した場合に、行われた旋回の旋回曲率半径と、道路幅に基づいて算出される幅員曲率半径とを比較し、旋回曲率半径が幅員曲率半径よりも小さい場合に、車両がUターンを行ったと判定する技術について記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−96141号公報(第6−7頁、図3)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1の記載の技術では、車両がUターンを行ったことを正確に判定できない場合があった。例えば、道路幅が比較的広い道路において障害物を回避する為に急旋回を行った場合等には、旋回曲率半径が幅員曲率半径よりも小さくなり、車両がUターンを行っていないにもかかわらず、車両がUターンを行ったと誤った判定がされてしまう場合がある。そして、そのような場合において逆走に対する警告を行うことは、運転者の運転操作を妨げるとともに、現在の車両の進行方向を混乱させてしまう虞があった。
【0007】
本発明は前記従来における問題点を解消するためになされたものであり、車両がUターンを行ったことを正確に判定することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため本願の請求項1に係る運転支援装置(1)は、車両が走行する道路の道路幅を取得する道路幅取得手段(42)と、前記道路幅取得手段によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定手段(43)と、前記車両の挙動を取得する車両挙動取得手段(44)と、前記道路幅取得手段によって取得された前記道路幅と前記車両挙動取得手段により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定手段(45)と、を有することを特徴とする。
尚、「前記車両において前記道路でUターンすることが可能な条件を満たす旋回」は、旋回方向、旋回曲率半径、旋回角度、周辺の道路状況等が一定の条件を満たす旋回をいう。
【0009】
また、請求項2に係る運転支援装置(1)は、請求項1に記載の運転支援装置において、前記上限速度設定手段(43)は、前記車両が前記道路でUターンした場合に前記車両に生じる横方向の加速度が所定加速度以下となる速度の上限を上限速度として設定することを特徴とする。
【0010】
また、請求項3に係る運転支援装置(1)は、請求項1又は請求項2に記載の運転支援装置において、前記車両が走行する前記道路が一方通行区間であって、前記Uターン判定手段(45)により前記車両が前記道路でUターンを行ったと判定された場合に、前記車両が逆走していることを警告する警告手段(46)を有することを特徴とする。
【0011】
また、請求項4に係る運転支援方法は、車両が走行する道路の道路幅を取得する道路幅取得ステップと、前記道路幅取得ステップによって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定ステップと、前記車両の挙動を取得する車両挙動取得ステップと、前記道路幅取得ステップによって取得された前記道路幅と前記車両挙動取得ステップにより取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定ステップと、を有することを特徴とする。
【0012】
更に、請求項5に係るコンピュータプログラムは、コンピュータに搭載され、車両が走行する道路の道路幅を取得する道路幅取得機能と、前記道路幅取得機能によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定機能と、前記車両の挙動を取得する車両挙動取得機能と、前記道路幅取得機能によって取得された前記道路幅と前記車両挙動取得機能により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定機能と、を有することを特徴とする。
【発明の効果】
【0013】
前記構成を有する請求項1に記載の運転支援装置によれば、車両が道路でUターンする為の上限速度を設定するとともに、設定された上限速度に基づいて車両がUターンを行ったか否かを判定するので、車両がUターンを行ったことを正確に判定することが可能となる。その結果、車両が逆走状態となったことを正確且つ迅速に把握することが可能となり、例えば、運転者に警告を行ったり、車両制御を行うことによって、逆走を中止させることが可能となる。
【0014】
また、請求項2に記載の運転支援装置によれば、Uターン時の乗員にかかる負担や安全面を考慮することによって、車両がUターンを行ったことを正確に判定することが可能となる。
【0015】
また、請求項3に記載の運転支援装置によれば、車両が一方通行区間を走行中にUターンを行ったと判定された場合に、車両が逆走していることを警告するので、車両がUターンを行うことによって逆走状態となった場合に、迅速に逆走を中止させることが可能となる。
【0016】
また、請求項4に記載の運転支援方法によれば、車両が道路でUターンする為の上限速度を設定するとともに、設定された上限速度に基づいて車両がUターンを行ったか否かを判定するので、車両がUターンを行ったことを正確に判定することが可能となる。その結果、車両が逆走状態となったことを正確且つ迅速に把握することが可能となり、例えば、運転者に警告を行ったり、車両制御を行うことによって、逆走を中止させることが可能となる。
【0017】
更に、請求項5に記載のコンピュータプログラムによれば、車両が道路でUターンする為の上限速度を設定させるとともに、設定させた上限速度に基づいて車両がUターンを行ったか否かを判定させるので、車両がUターンを行ったことを正確に判定させることが可能となる。その結果、車両が逆走状態となったことを正確且つ迅速に把握することが可能となり、例えば、運転者に警告を行ったり、車両制御を行うことによって、逆走を中止させることが可能となる。
【図面の簡単な説明】
【0018】
【図1】本実施形態に係るナビゲーション装置を示したブロック図である。
【図2】ナビゲーションECUの構成を示した図である。
【図3】本実施形態に係る逆走警告処理プログラムのフローチャートである。
【図4】Uターン検出処理のサブ処理プログラムのフローチャートである。
【図5】旋回時の車両の横方向に生じる加速度を旋回曲率半径毎に示した図である。
【図6】車両がUターンすることによって逆走状態となる例を示した図である。
【発明を実施するための形態】
【0019】
以下、本発明に係る運転支援装置についてナビゲーション装置に具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
【0020】
図1に示すように本実施形態に係るナビゲーション装置1は、車両の現在位置を検出する現在位置検出部11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU13と、ユーザからの操作を受け付ける操作部14と、ユーザに対して地図や目的地までの案内経路を表示する液晶ディスプレイ15と、経路案内に関する音声ガイダンスを出力するスピーカ16と、プログラムを記憶した記憶媒体であるDVDを読み取るDVDドライブ17と、交通情報センタ等の情報センタとの間で通信を行う通信モジュール18と、から構成されている。
【0021】
以下に、ナビゲーション装置1を構成する各構成要素について順に説明する。
現在位置検出部11は、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24、Gセンサ25、高度計(図示せず)等からなり、現在の車両の位置、方位、車両の走行速度等を検出することが可能となっている。ここで、特に車速センサ22は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。尚、上記5種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
【0022】
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31や所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。
【0023】
ここで、地図情報DB31は、経路案内、交通情報案内及び地図表示に必要な各種地図データが記録されている。
また、地図データは、具体的には、道路(リンク)形状に関するリンクデータ32、ノード点に関するノードデータ33、施設等の地点に関する情報であるPOIデータ、各交差点に関する交差点データ、経路を探索するための探索データ、地点を検索するための検索データ、地図、道路、交通情報等の画像を液晶ディスプレイ15に描画するための画像描画データ等から構成されている。特にリンクデータ32としては、リンクの道路種別(高速自動車道路、都市高速道路、自動車専用道路、一般有料道路、取付道路、一般道路)に関する情報や、道路幅に関する情報、一方通行区間の設定有無に関する情報等が記憶される。
尚、地図情報DB31は、地図配信センタ等から配信される更新データや記憶媒体(例えば、DVDやメモリーカード)を介して提供される更新データに基づいて更新される。
【0024】
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)13は、図2に示すように目的地が選択された場合に出発地から目的地までの案内経路を設定する案内経路設定手段41、車両が走行する道路の道路幅を取得する道路幅取得手段42、取得された道路幅に基づいて車両が道路でUターンする為の上限速度を設定する上限速度設定手段43、車両の挙動を取得する車両挙動取得手段44、取得された道路幅及び車両の挙動に基づいて車両において道路でUターンすることが可能な条件を満たす旋回が上限速度以下で行われた場合に、車両が道路でUターンを行ったと判定するUターン判定手段45、車両が走行する道路が一方通行区間であって、Uターン判定手段により車両が道路でUターンを行ったと判定された場合に、車両が逆走していることを警告する警告手段46等を構成し、ナビゲーション装置1の全体の制御を行う電子制御ユニットである。そして、演算装置及び制御装置としてのCPU51、並びにCPU51が各種の演算処理を行うにあたってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM52、制御用のプログラムのほか、後述の逆走警告処理プログラム(図3参照)等が記録されたROM53、ROM53から読み出したプログラムを記憶するフラッシュメモリ54等の内部記憶装置を備えている。
【0025】
操作部14は、走行開始地点としての出発地及び走行終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)から構成される。そして、ナビゲーションECU13は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、液晶ディスプレイ15の前面に設けたタッチパネルによって構成することもできる。
【0026】
また、液晶ディスプレイ15には、道路を含む地図画像、交通情報、操作案内、操作メニュー、キーの案内、出発地から目的地までの案内経路、案内経路に沿った案内情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。また、車両が一方通行区間の走行中にUターンを行ったと判定された場合には、逆走状態になったと推定し、逆走に対する警告を表示する。
【0027】
また、スピーカ16は、ナビゲーションECU13からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスや、交通情報の案内を出力する。また、車両が一方通行区間の走行中にUターンを行ったと判定された場合には、逆走状態になったと推定し、逆走に対する警告音声を出力する。
【0028】
また、DVDドライブ17は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて地図情報DB31の更新等が行われる。
【0029】
また、通信モジュール18は、交通情報センタ、例えば、VICS(登録商標:Vehicle Information and Communication System)センタやプローブセンタ等から送信された渋滞情報、規制情報、交通事故情報等の各情報から成る交通情報を受信する為の通信装置であり、例えば携帯電話機やDCMが該当する。
【0030】
続いて、前記構成を有するナビゲーション装置1において実行する逆走警告処理プログラムについて図3に基づき説明する。図3は本実施形態に係る逆走警告処理プログラムのフローチャートである。ここで、逆走警告処理プログラムは車両のACCがONされた後に実行され、車両が一方通行区間の走行中にUターンを行ったか否かを判定し、その判定結果に基づいて逆走に対する警告を行うプログラムである。尚、以下の図3及び図4にフローチャートで示されるプログラムは、ナビゲーションECU13が備えているRAM52、ROM53等に記憶されており、CPU51により実行される。
【0031】
逆走警告処理プログラムでは、先ずステップ(以下、Sと略記する)1において、CPU51は、フェール判定処理を行う。フェール判定処理では、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24、Gセンサ25等の各種機器が正常に作動しているか否かの判定を行う。
【0032】
そして、前記S1の処理においてフェール状態であると判定された場合(S2:YES)には、当該逆走警告処理プログラムを終了する。それに対して、フェール状態でないと判定された場合(S2:NO)には、S3へと移行する。
【0033】
S3においてCPU51は、マッチング状態判定処理を行う。マッチング状態判定処理では、マップマッチング処理によって車両の現在位置が正しく地図のリンク上に特定されている状態(マッチング状態)にあるか否かの判定を行う。尚、車両の現在位置をリンク上に特定する際には、GPS21に加えてGセンサ25も用いる。具体的には、上下方向に道路が重複して設置されている場合には、Gセンサ25により車両に生じた加速度を検出することによって、いずれの道路を走行しているかを特定する。
【0034】
そして、前記S3の処理においてマッチング状態にあると判定された場合(S4:YES)には、S5へと移行する。それに対して、マッチング状態にないと判定された場合(S4:NO)には、当該逆走警告処理プログラムを終了する。
【0035】
S5においてCPU51は、車両の走行する道路の走行区間に関する情報(道路種別、規制情報等)を地図情報DB31から取得する。具体的には、車両の現在走行するリンクを特定し、該リンクのリンクデータ32を地図情報DB31から取得することにより行う。
【0036】
続いて、S6においてCPU51は、前記S5で取得した情報に基づいて車両が走行する区間が一方通行区間であるか否か判定する。具体的には、車両の現在走行するリンクのリンクデータ32に基づいて判定する。尚、一方通行区間とは予め決められた方向のみに車両が走行可能に構成されている区間であり、道路幅の狭い一般道の他、高速自動車道路、都市高速道路、自動車専用道路、一般有料道路、国道等の高速走行が可能な一部の道路においても設定されている。
【0037】
そして、車両が走行する区間が一方通行区間であると判定された場合(S6:YES)には、S7へと移行する。それに対して、車両が走行する区間が一方通行区間でないと判定された場合(S6:NO)には、当該逆走警告処理プログラムを終了する。
【0038】
S7においてCPU51は、後述のUターン検出処理(図4)を行う。尚、Uターン検出処理は、車両においてUターンが行われた場合に車両がUターンを行ったことを検出する処理である。また、Uターン検出処理では、後述のように車両がUターンを行ったことが検出された場合にはRAM52に記憶されているUターンフラグがONされる。
【0039】
次に、S8においてCPU51は、RAM52に記憶されているUターンフラグを読み出し、UターンフラグがONであるか否か、即ち、車両がUターンを行ったか否かを判定する。尚、Uターンフラグは初期状態ではOFFに設定される。
【0040】
そして、UターンフラグがONである、即ち、車両がUターンを行ったと判定された場合(S8:YES)には、車両がUターンを行ったことによって逆走状態(道路に設定されている進行方向と逆方向に走行する状態)にあると推定し、S9へと移行する。一方、UターンフラグがOFFである、即ち、車両がUターンを行っていないと判定された場合(S8:NO)には、逆走状態にないと推定し、警告を行うことなく当該逆走警告処理プログラムを終了する。
【0041】
S9においてCPU51は、車両が逆走していることを警告する警告処理を行う。具体的には、液晶ディスプレイ15に対して「現在、道路を逆走していますので注意して下さい。」とのメッセージを表示したり、同内容の音声をスピーカ16から出力する。
【0042】
次に、上記S7のUターン検出処理のサブ処理について図4に基づき説明する。図4は逆走検出処理のサブ処理プログラムのフローチャートである。
【0043】
先ず、S11においてCPU51は、ジャイロセンサ24により検出された検出値を取得する。尚、取得した検出値は後述のS16で車両においてUターン可能な旋回が行われたか否か判定する際に用いられる。
【0044】
次に、S12においてCPU51は、車速センサ22の検出結果に基づいて現在の車両の車速を取得する。
【0045】
続いて、S13においてCPU51は、車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(以下、横加速度許容値という)を設定する。
ここで、車両が旋回すると遠心力によって車両には横方向に加速度が生じる。この横方向の加速度は、旋回時の車速が速い程及び旋回曲率半径が小さい程大きくなる。また、横方向の加速度が大きくなり過ぎると、乗員に負担が生じ、また、スリップの原因にもなる。従って、車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行う為には、車両の横方向に生じる加速度は所定値以下である必要があり、この所定値を横加速度許容値とする。
尚、本実施形態では横加速度許容値は0.8G[9.81kg.m/sec2]とする。また、横加速度許容値は車種、天候、乗員の数、年齢、過去のUターン時に生じた横方向の加速度等に応じて設定しても良い。
【0046】
次に、S14においてCPU51は、幅員曲率半径を取得する。尚、幅員曲率半径は、車両が現在走行する道路でUターンを行うことが可能な最大の旋回曲率半径であり、道路幅の1/2となる。具体的には、車両が現在走行する道路幅を地図情報DB31から取得して、取得した道路幅の半分の長さを算出することにより幅員曲率半径を取得する。
【0047】
続いて、S15においてCPU51は、前記S13で取得した横加速度許容値と前記S14で取得した幅員曲率半径とに基づいて、“車両が道路でUターンする為の上限速度”を設定する。ここで、“車両が道路でUターンする為の上限速度”は、車両が現在走行する道路でUターンした場合に、乗員に負担がかかることなく安全にUターンを行うことが可能な速度の上限であり、具体的には、車両が前記S14で取得した幅員曲率半径で旋回した場合に、車両に生じる横方向の加速度が前記S13で取得した横加速度許容値以下となる速度の上限値となる。
【0048】
以下に、上記S15の“車両が道路でUターンする為の上限速度”の設定処理の詳細について説明する。
旋回時に車両に生じる横方向の加速度をk、旋回時の車速をV、旋回曲率半径をR、重力加速度をgとすると、旋回時に車両に生じる横方向の加速度kは以下の式(1)で示される。
k=V2/(R×g)・・・・(1)
そして、図5は、旋回曲率半径Rを4m、5.5m、10mとした場合において、車速Vに対する旋回時に車両に生じる横方向の加速度kの変化をそれぞれ示した図である。
【0049】
図5に示すように、旋回時に車両に生じる横方向の加速度は、旋回時の車速が速い程及び旋回曲率半径が小さい程大きくなる。そして、横加速度許容値を0.8Gとすると、“車両が道路でUターンする為の上限速度Vmax”は以下の式(2)で示される。
Vmax=√(0.8×R×g)・・・・(2)
そして、前記S15では上記式(2)に基づいて、“車両が道路でUターンする為の上限速度”が算出され、設定される。例えば、幅員曲率半径が4mの道路では、“車両が道路でUターンする為の上限速度”は20.2km/hとなる。また、幅員曲率半径が5.5mの道路では、“車両が道路でUターンする為の上限速度”は23.7km/hとなる。また、幅員曲率半径が10mの道路では、“車両が道路でUターンする為の上限速度”は31.9km/hとなる。
【0050】
次に、S16においてCPU51は、車両においてUターンすることが可能な条件を満たす旋回が行われたか否か判定する。ここで、Uターンすることが可能な条件を満たす旋回とは、旋回方向や旋回曲率半径が条件を満たす旋回であり、例えば、右方向の旋回であって、旋回曲率半径が幅員曲率半径よりも小さい旋回とする。尚、旋回方向や旋回曲率半径については前記S1で取得したジャイロセンサ24の検出値を用いて算出する。尚、旋回方向や旋回曲率半径に加えて又は代わりに、旋回角度や周辺の道路状況等を用いて判定しても良い。
【0051】
そして、車両においてUターン可能な旋回が行われたと判定された場合(S16:YES)には、S17へと移行する。それに対して、車両においてUターン可能な旋回が行われていないと判定された場合(S16:NO)には、車両がUターンを行っていないと判定し、当該Uターン検出処理のサブ処理プログラムを終了し、S8へと移行する。
【0052】
S17においてCPU51は、前記S12で取得された現在の車両の車速(即ち、車両の旋回速度)が前記S15で設定した“車両が道路でUターンする為の上限速度”以下であるか否か判定する。
【0053】
そして、車両の旋回速度が“車両が道路でUターンする為の上限速度”以下であると判定された場合(S17:YES)には、車両がUターンを行ったと判定し、S18へと移行する。それに対して、車両の旋回速度が“車両が道路でUターンする為の上限速度”より速いと判定された場合(S17:NO)には、車両では障害物を回避する為の急旋回やスピンが行われたのであり、Uターンは行っていないと判定し、当該Uターン検出処理のサブ処理プログラムを終了し、S8へと移行する。
即ち、車両において道路でUターンすることが可能な条件を満たす旋回が上限速度以下で行われたか否かを判定することにより、車両が道路でUターンを行ったか否かを判定することとなる。そして、車両において道路でUターンすることが可能な条件を満たす旋回が上限速度以下で行われたと判定された場合に、車両が道路でUターンを行ったと判定する。
【0054】
S18においてCPU51は、RAM52からUターンフラグを読み出し、UターンフラグをONに設定する。その後、S8へと移行する。その後、車両が逆走していることを警告する警告処理を行う(S9)。
【0055】
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1では、車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(横加速度許容値)を設定し(S13)、設定された横加速度許容値や幅員曲率半径に基づいて“車両が道路でUターンする為の上限速度”を設定し(S14)、車両が一方通行区間の走行中にUターン可能な旋回を行った場合であって、その時の旋回速度が“車両が道路でUターンする為の上限速度”以下である場合に車両がUターンを行ったと判定するとともに、車両がUターンを行ったことによって逆走状態にあると認定し、車両が逆走していることを警告する(S9)ので、車両がUターンを行ったことを正確に判定することが可能となる。また、車両がUターンを行うことによって逆走状態となった場合に、迅速に逆走を中止させることが可能となる。
また、車両が道路でUターンした場合に車両に生じる横方向の加速度が所定加速度以下となる速度の上限を上限速度として設定するので、Uターン時の乗員にかかる負担や安全面を考慮することによって車両がUターンを行ったことを正確に判定することが可能となる。
【0056】
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態では“車両が道路でUターンする為の上限速度”を、車両が前記S14で取得した幅員曲率半径で旋回した場合に、車両に生じる横方向の加速度が前記S13で取得した横加速度許容値以下となる速度の上限値としているが、幅員曲率半径でなく車両の最小旋回曲率半径としても良い。また、実際に車両が旋回した旋回曲率半径を検出し、検出した旋回曲率半径としても良い。
【0057】
また、本実施形態では横加速度許容値は0.8G[9.81kg.m/sec2]としているが、他の値であっても良い。また、横加速度許容値は車種、天候、乗員の数、年齢、過去のUターン時に生じた横方向の加速度などに応じて変更しても良い。
【符号の説明】
【0058】
1 ナビゲーション装置
13 ナビゲーションECU
51 CPU
52 ROM
53 RAM
【特許請求の範囲】
【請求項1】
車両が走行する道路の道路幅を取得する道路幅取得手段と、
前記道路幅取得手段によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定手段と、
前記車両の挙動を取得する車両挙動取得手段と、
前記道路幅取得手段によって取得された前記道路幅と前記車両挙動取得手段により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定手段と、を有することを特徴とする運転支援装置。
【請求項2】
前記上限速度設定手段は、前記車両が前記道路でUターンした場合に前記車両に生じる横方向の加速度が所定加速度以下となる速度の上限を上限速度として設定することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記車両が走行する前記道路が一方通行区間であって、前記Uターン判定手段により前記車両が前記道路でUターンを行ったと判定された場合に、前記車両が逆走していることを警告する警告手段を有することを特徴とする請求項1又は請求項2に記載の運転支援装置。
【請求項4】
車両が走行する道路の道路幅を取得する道路幅取得ステップと、
前記道路幅取得ステップによって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定ステップと、
前記車両の挙動を取得する車両挙動取得ステップと、
前記道路幅取得ステップによって取得された前記道路幅と前記車両挙動取得ステップにより取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定ステップと、を有することを特徴とする運転支援方法。
【請求項5】
コンピュータに搭載され、
車両が走行する道路の道路幅を取得する道路幅取得機能と、
前記道路幅取得機能によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定機能と、
前記車両の挙動を取得する車両挙動取得機能と、
前記道路幅取得機能によって取得された前記道路幅と前記車両挙動取得機能により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定機能と、
を実行させることを特徴とするコンピュータプログラム。
【請求項1】
車両が走行する道路の道路幅を取得する道路幅取得手段と、
前記道路幅取得手段によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定手段と、
前記車両の挙動を取得する車両挙動取得手段と、
前記道路幅取得手段によって取得された前記道路幅と前記車両挙動取得手段により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定手段と、を有することを特徴とする運転支援装置。
【請求項2】
前記上限速度設定手段は、前記車両が前記道路でUターンした場合に前記車両に生じる横方向の加速度が所定加速度以下となる速度の上限を上限速度として設定することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記車両が走行する前記道路が一方通行区間であって、前記Uターン判定手段により前記車両が前記道路でUターンを行ったと判定された場合に、前記車両が逆走していることを警告する警告手段を有することを特徴とする請求項1又は請求項2に記載の運転支援装置。
【請求項4】
車両が走行する道路の道路幅を取得する道路幅取得ステップと、
前記道路幅取得ステップによって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定ステップと、
前記車両の挙動を取得する車両挙動取得ステップと、
前記道路幅取得ステップによって取得された前記道路幅と前記車両挙動取得ステップにより取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定ステップと、を有することを特徴とする運転支援方法。
【請求項5】
コンピュータに搭載され、
車両が走行する道路の道路幅を取得する道路幅取得機能と、
前記道路幅取得機能によって取得された前記道路幅に基づいて、前記車両が前記道路でUターンする為の上限速度を設定する上限速度設定機能と、
前記車両の挙動を取得する車両挙動取得機能と、
前記道路幅取得機能によって取得された前記道路幅と前記車両挙動取得機能により取得された前記車両の挙動とに基づいて、前記車両において前記道路でUターンすることが可能な条件を満たす旋回が前記上限速度以下で行われたか否かを判定することにより、前記車両が前記道路でUターンを行ったか否かを判定するUターン判定機能と、
を実行させることを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−64121(P2012−64121A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−209515(P2010−209515)
【出願日】平成22年9月17日(2010.9.17)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月17日(2010.9.17)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]