
運転支援装置および運転支援システム
【課題】より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することを可能にする。
【解決手段】道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している制限速度データベース27と、車両3の走行中の道路の道路条件情報を取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得て、当該制限速度の情報をもとに当該走行中の道路の制限速度を推定する制御装置26と、を備える。
【解決手段】道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している制限速度データベース27と、車両3の走行中の道路の道路条件情報を取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得て、当該制限速度の情報をもとに当該走行中の道路の制限速度を推定する制御装置26と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行中の道路の制限速度の情報を得る運転支援装置および運転支援システムに関するものである。
【背景技術】
【0002】
従来から、ドライバーの不注意による速度超過を防止するための技術が提案されている。例えば、特許文献1には、ナビゲーションシステムで利用されるCD−ROM等の記憶手段に記憶されている地図情報や自車両の前方を撮像するカメラで撮像した道路標識や路面標示の認識結果から制限速度の情報を得て、得られた制限速度の情報をもとに速度超過を判定し、速度超過の場合には警報を行う技術が開示されている。
【0003】
詳しくは、特許文献1に開示の技術では、前述の地図情報から読み込んだ自車両の走行中の道路の制限速度(以下、制限速度イとする)の情報と、前述のカメラで撮像した道路標識や路面標示の認識結果から得た制限速度(以下、制限速度ロとする)の情報とを比較し、制限速度イと制限速度ロとが一致すれば、その制限速度を採用し、制限速度イと制限速度ロとが不一致であれば、一方を制限速度として採用し、採用された制限速度の情報をもとに速度超過を判定して、速度超過の場合には警報を行う。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−128790号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示の技術では、制限速度の情報が含まれる地図情報が記憶手段に記憶されている必要がある。制限速度の情報が含まれる地図情報は近年になって採用され始めたものであるため、制限速度の情報が含まれる地図情報を採用していないナビゲーションシステムは未だに多く、この技術を適用できない場合が多い。つまり、特許文献1に開示の技術は、汎用性に欠けるという問題点を有している。
【0006】
なお、制限速度の情報が含まれていない地図情報に制限速度の情報を新たに追加することも考えられるが、制限速度の情報が含まれていない地図情報に制限速度の情報を新たに追加するには、多大なコストが発生してしまうため現実的でない。
【0007】
さらに、特許文献1に開示の技術では、地図情報中で制限速度の情報が存在しない道路を走行しており、且つ、カメラで撮像した道路標識や路面標示の画像認識に失敗した場合には、走行中の道路の制限速度が特定できないという問題点を有している。画像認識には、一般的にテンプレートマッチングが用いられるが、テンプレートマッチングは用意するテンプレートにより認識率が大きく左右され、例えば、標識が傾いてカメラに映ったり、標識自体が色あせていて画像処理で輪郭がうまく抽出できなかったり、雨天等で撮像条件が悪かったりした場合には、画像認識に失敗することが大いに考えられる。
【0008】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することを可能にする運転支援装置および運転支援システムを提供することにある。
【課題を解決するための手段】
【0009】
請求項1の運転支援装置は、上記課題を解決するために、車両に搭載される運転支援装置であって、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している対応関係データ格納部と、前記車両の走行中の道路の前記道路条件情報を取得する道路条件情報取得部と、前記道路条件情報取得部で取得した道路条件情報をもとに前記対応関係データ格納部に格納されている前記対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得るデータ参照部と、前記データ参照部で得られた制限速度の情報をもとに当該走行中の道路の制限速度を推定する制限速度推定部と、を備えることを特徴としている。
【0010】
これによれば、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを取得しさえすれば、対応関係データを参照して、これらの情報に対応する制限速度の情報を得ることができる。よって、例えば、対応関係データにおいて実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応が精度良くなされていれば、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報をもとに、この対応関係データを参照して、走行中の道路の制限速度を精度良く推定することができる。従って、以上の構成によれば、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0011】
また、以上の構成によれば、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを取得しさえすれば、走行中の道路の制限速度をより精度良く推定することが可能になるので、制限速度の情報が含まれる地図情報を利用したり、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行ったりしなくても、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0012】
従って、以上の構成によれば、より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することが可能になる。
【0013】
また、請求項2の運転支援装置では、前記車両の速度の情報を取得する車速情報取得部と、警告を行う警告部と、前記制限速度推定部で推定した制限速度を前記車速情報取得部で取得した速度の情報が示す速度が超過していると判定した場合に前記警告部で警告を行わせる警告判定部と、をさらに備えることを特徴としている。
【0014】
これによれば、車両の速度が制限速度推定部で推定した制限速度を超過していると判定した場合に警告を行うので、ドライバーの不注意による速度超過をより防止することが可能になる。
【0015】
また、請求項3の運転支援装置では、前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、前記画像認識部で制限速度の情報を認識することができた場合に前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報を当該制限速度の情報に対応付ける処理を、統計をとりながら繰り返していくことによって、前記道路条件情報と前記制限速度の情報とに加えて統計数も対応付けられた前記対応関係データを作成し、作成したこの対応関係データを前記対応関係データ格納部に格納される対応関係データとする対応関係データ作成部と、をさらに備えることを特徴としている。
【0016】
制限速度は、地域ごとに自由に設定されているが、車線数、歩道の有り無し、中央分離帯の有り無し等の各項目によって制限速度を定める規制速度算出要領に則って制限速度が設定されている地域も多い。また、制限速度を定める上で、規制速度算出要領の各項目の中でも車線数(ひいては幅員)の影響が特に大きい。よって、車線数や幅員と実際の制限速度との間には特に強い相関があると言える。また、制限速度は、高速道路、自動車専用道路、一般道路といった道路種別によって設定され得る範囲が大まかに決まっている。よって、道路種別と実際の制限速度との間にも特に強い相関があると言える。
【0017】
従って、以上の構成のように、撮像部で撮像した画像に基づく画像認識によって認識することができた道路標識や路面標示の制限速度の情報と走行中の道路の道路条件情報(つまり、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報)との対応付けを、統計をとりながら繰り返すことによって得られた対応関係データにおいては、実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がより精度良くなされている可能性が高い。
【0018】
よって、以上の構成によれば、対応関係データにおいて実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がより精度良くなされている可能性が高くなるので、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報をもとに、この対応関係データを参照して、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0019】
また、請求項4の運転支援装置では、前記制限速度推定部は、同一の前記道路条件情報に対して複数種類の制限速度の情報が前記データ参照部で得られた場合には、当該複数種類の制限速度の情報のうちの、前記統計数が1番目に多い制限速度の情報が示す制限速度と前記統計数が2番目に多い制限速度の情報が示す制限速度とを比較し、値が低い方の制限速度を前記車両の走行中の道路の制限速度として推定することを特徴としている。
【0020】
これによれば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照部で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が小さいときのような、統計数が1番目に多い制限速度の情報の信憑性がより低い場合であっても、値がより低い方の制限速度を車両の走行中の道路の制限速度として推定するので、推定が誤っていた場合であっても制限速度を実際の制限速度よりも高く推定する可能性を低減することができる。従って、車両の速度が実際の制限速度を超過している場合にも警告を行わない状況が生じる可能性を低減することが可能になり、ドライバーの不注意による速度超過をより防止することが可能になる。
【0021】
また、請求項5の運転支援装置では、前記制限速度推定部は、前記統計数が1番目に多い制限速度の情報の統計数と前記統計数が2番目に多い制限速度の情報の統計数との差が所定の閾値以上であった場合には、前記統計数が1番目に多い制限速度の情報が示す制限速度を前記車両の走行中の道路の制限速度として優先して推定することを特徴とする。
【0022】
同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照部で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が大きいときのような、統計数が1番目に多い制限速度の情報の信憑性がより高い場合には、走行中の道路の制限速度を実際の制限速度よりも高く推定する可能性が低い。よって、以上の構成によれば、統計数が1番目に多い制限速度の情報の信憑性がより高い場合には、統計数が1番目に多い制限速度の情報が示す制限速度を車両の走行中の道路の制限速度として優先して推定することが可能になり、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0023】
また、請求項6の運転支援装置では、前記運転支援装置は、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限含む地図データを記憶する記憶装置から当該地図データを取得するものであって、前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを、前記記憶装置に記憶されている地図データから取得することを特徴としている。
【0024】
この請求項6のように、運転支援装置が、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限含む地図データを記憶する記憶装置から当該地図データを取得するものであって、道路条件情報取得部が、最低限でも道路条件情報のうちの道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを、記憶装置に記憶されている地図データから取得する態様としてもよい。
【0025】
また、請求項7の運転支援装置では、前記運転支援装置は、道路種別の情報を少なくとも含む地図データを記憶する記憶装置から当該地図データを取得するものであって、前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの道路種別の情報を、前記記憶装置に記憶されている地図データから取得するとともに、前記車線数の情報および前記幅員の情報のうちの少なくともいずれかの情報については、前記撮像部で撮像した画像に基づく画像認識によって取得することを特徴としている。
【0026】
この請求項7のように、運転支援装置が、道路種別の情報を少なくとも含む地図データを記憶する記憶装置から当該地図データを取得するものであって、道路条件情報取得部が、最低限でも道路条件情報のうちの道路種別の情報を、記憶装置に記憶されている地図データから取得するとともに、車線数の情報および幅員の情報のうちの少なくともいずれかの情報については、撮像部で撮像した画像に基づく画像認識によって取得する態様としてもよい。
【0027】
また、請求項8の運転支援システムは、上記課題を解決するために、前記のいずれかの運転支援装置を備えた複数台の車両と、情報センタと、を含み、前記運転支援装置は、前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、前記情報センタとの間でデータの送受信を行う通信部と、をさらに備え、前記画像認識部で制限速度の情報を認識することができた場合に、前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報と当該制限速度の情報とを組み合わせた情報である組み合わせ情報を前記通信部によって前記情報センタに送信するとともに、前記情報センタは、複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる前記組み合わせ情報を統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴としている。
【0028】
これによれば、各車両に搭載された各運転支援装置でそれぞれ画像認識によって認識された制限速度の情報とその制限速度の情報を認識することができた際に走行中の道路の道路条件情報との組み合わせ情報を情報センタで統合して新たな対応関係データを作成するので、1つの運転支援装置のみで対応関係データを作成する場合よりも全体の統計数が増し、実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。そして、この新たな対応関係データを運転支援装置の対応関係データ格納部に対応関係データとして格納し、この新たな対応関係データを参照して走行中の道路の制限速度の推定が行われることになるので、走行中の道路の制限速度をさらに精度良く推定することが可能になる。
【0029】
また、各車両の現在位置の情報をもとに情報センタ側で当該現在位置の道路の制限速度の情報を調べて各車両に配信する構成を想定した場合には、情報センタ側で各車両に個別の処理を行うため、情報センタの負荷が増大する問題が生じる。
【0030】
これに対して、請求項8の構成によれば、上述の新たな対応関係データを各車両の運転支援装置に一律に送信(配信)するだけで、各運転支援装置において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ側の処理の負荷を抑えることができる。
【0031】
また、請求項9の運転支援システムは、上記課題を解決するために、前記のいずれかの運転支援装置を備えた複数台の車両と、情報センタと、を含み、前記運転支援装置は、前記情報センタとの間でデータの送受信を行う通信部をさらに備え、前記対応関係データ作成部で作成した対応関係データを前記通信部によって前記情報センタに送信するとともに、前記情報センタは、複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる対応関係データを統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴としている。
【0032】
これによれば、各車両に搭載された各運転支援装置でそれぞれ作成された対応関係データを情報センタで統合して新たな対応関係データを作成するので、1つの運転支援装置のみで作成された対応関係データよりも全体の統計数が増し、実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。そして、この新たな対応関係データを運転支援装置の対応関係データ格納部に対応関係データとして格納し、この新たな対応関係データを参照して走行中の道路の制限速度の推定が行われることになるので、走行中の道路の制限速度をさらに精度良く推定することが可能になる。
【0033】
また、各車両の現在位置の情報をもとに情報センタ側で当該現在位置の道路の制限速度の情報を調べて各車両に配信する構成を想定した場合には、情報センタ側で各車両に個別の処理を行うため、情報センタの負荷が増大する問題が生じる。また、他にも、各車両の進行に合わせて頻繁に各車両それぞれの走行中の道路の制限速度の情報を個別に配信しなければならないので、情報センタと各車両との間での通信が混み合ってしまい、通信網への負荷が増大する問題も生じる。
【0034】
これに対して、請求項9の構成によれば、上述の新たな対応関係データを各車両の運転支援装置に一律に送信(配信)するだけで、各運転支援装置において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ側の処理の負荷を抑えることができる。また、請求項9の構成によれば、上述の新たな対応関係データをもとに各車両の運転支援装置で自律的に車両の進行に合わせて走行中の道路の制限速度を精度良く推定することが可能であるので、通信網への負荷が増大し過ぎるおそれもない。
【図面の簡単な説明】
【0035】
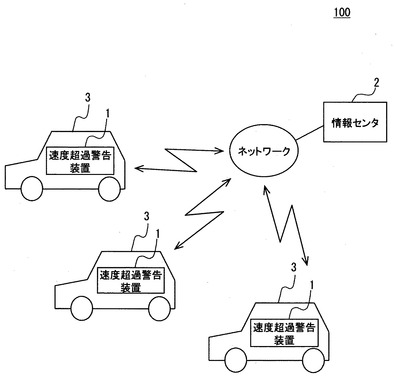
【図1】速度超過警告システム100の概略的な構成を示すブロック図である。
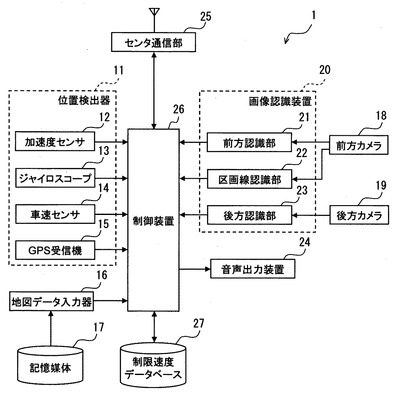
【図2】速度超過警告装置1の概略的な構成を示すブロック図である。
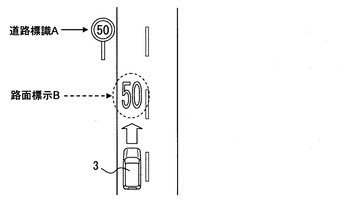
【図3】片側2車線の場合の道路状況を示す一例である。
【図4】片側2車線の場合の道路状況を示す一例である。
【図5】対応関係データの一例を示す図である。
【図6】速度超過警告装置1の動作フローの一例を示すフローチャートである。
【図7】制限速度推定処理の動作フローの一例を示すフローチャートである。
【発明を実施するための形態】
【0036】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された速度超過警告システム100の概略的な構成を示すブロック図である。図1に示す速度超過警告システム100は、速度超過警告装置1を搭載した複数の車両3および情報センタ2を含んでいる。
【0037】
情報センタ2は、例えばサーバから構成されており、ネットワーク(つまり、通信網)を介して複数の車両3の速度超過警告装置1と通信することが可能な通信装置、車両3の速度超過警告装置1から送信されてくる後述の対応関係データを統合した情報を格納する記憶装置、および通信や対応関係データの統合の処理等を制御する制御装置などを備えている。なお、情報センタ2は、1つのサーバからなるものであってもよいし、複数のサーバからなっているものであってもよい。
【0038】
速度超過警告装置1は、自動車等の車両に搭載されるものであって、本実施形態では、自動車としての車両3に搭載されるものとする。速度超過警告装置1は、例えば、情報センタ2とネットワークを介して通信を行う機能、ならびに車両3の走行中の道路の制限速度の情報を後述する画像認識や後述する対応関係データを利用した推定によって得たりする機能等を有している。なお、図1では、速度超過警告システム100に速度超過警告装置1を搭載した3台の車両3を含む構成を示したが、必ずしもこれに限らない。速度超過警告装置1を搭載した車両3は、速度超過警告システム100に複数台含まれていればよく、3台以外の複数台の車両3が含まれている構成であってもよい。
【0039】
ここで、図2を用いて速度超過警告装置1の概略的な構成について説明を行う。図2は、速度超過警告装置1の概略的な構成を示すブロック図である。図2に示すように速度超過警告装置1は、位置検出器11、地図データ入力器16、前方カメラ18、後方カメラ19、画像認識装置20、音声出力装置24、センタ通信部25、制限速度データベース27、およびこれらと接続された制御装置26を備えている。
【0040】
位置検出器11は、周知の加速度センサ12、ジャイロスコープ13、車速センサ14、および衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有しており、ハイブリッド航法により車両3の現在位置を算出する。なお、これらのセンサ等12〜15は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。また、位置検出器11は、精度によっては上述した内の一部で構成してもよく、さらにステアリングの回転センサ、各転動輪の車両センサ、地磁気センサ等を用いてもよい。
【0041】
地図データ入力器16は、記憶媒体17が装着され、その記憶媒体17に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。よって、記憶媒体17は、請求項の記憶装置として機能する。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別(高速道路、一般道路など)、道路幅員(つまり、幅員)、車線数、および右折・左折専用車線の有無とその専用車線の数等の各データから構成される。
【0042】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。なお、記憶媒体17としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0043】
前方カメラ18は、車両3の前方を撮像するカメラであって、後方カメラ19は、車両3の後方を撮像するカメラである。なお、前方カメラ18および後方カメラ19としては、例えばCCDカメラを用いることができる。よって、前方カメラ18および後方カメラ19は、請求項の撮像部として機能する。
【0044】
画像認識装置20は、前方認識部21、区画線認識部22、および後方認識部23を備えている。そして、画像認識装置20は、前方カメラ18や後方カメラ19で撮像された画像をもとに画像認識を行い、道路標識や路面標示に示されている制限速度の情報を認識したり、車両通行帯境界線を示す区画線(白い実線、白い破線、黄色い実線等)や車道外側線を示す区画線(白い実線等)を認識することによって車線数や幅員を認識したりする。よって、画像認識装置20は、請求項の画像認識部として機能する。
【0045】
詳しくは、前方認識部21は、前方カメラ18で撮像された画像をもとに画像認識を行い、車両3の走行中の道路の道路標識や路面標示に示されている制限速度の情報を認識し、認識した制限速度の情報を制御装置26に送る。また、区画線認識部22は、前方カメラ18で撮像された画像をもとに画像認識を行い、車両通行帯境界線を示す区画線や車道外側線を示す区画線を認識し、走行中の道路の車線数や幅員を算出する。そして、算出した車線数や幅員の情報を制御装置26に送る。さらに、後方認識部21は、後方カメラ19で撮像された画像をもとに画像認識を行い、車両3の走行中の道路の路面標示に示されている制限速度の情報を認識し、認識した制限速度の情報を制御装置26に送る。なお、前方認識部21、区画線認識部22、および後方認識部23で行う画像認識については、例えばテンプレートマッチングを用いる方法などの周知の方法を用いて行うものとする。なお、ここで言うところの制限速度とは、道路交通法第22条の道路標識等により指定する最高速度を示しており、他には規制速度とも言い換えることができる。
【0046】
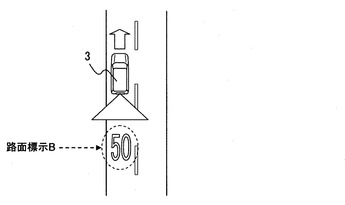
ここで、図3および図4を用いて、前方カメラ18で撮像された画像をもとに画像認識を行って制限速度の情報を認識する具体例と後方カメラ19で撮像された画像をもとに画像認識を行って制限速度の情報を認識する具体例とを示す。なお、図3および図4は、片側2車線の場合の道路状況を示す一例である。
【0047】
図3に示すように、道路脇などに立てられている道路標識Aや道路にペイントされている路面標示Bを前方カメラ18で撮像した場合には、画像認識によって道路標識Aや路面標示Bに示されている走行中の道路の制限速度の情報(図3の例では50km/h)を認識することになる。また、前方カメラ18で撮像した画像から路面標示Bの制限速度の情報が認識できなかった場合には、図4に示すように、後方カメラ19で路面標示Bを撮像し、画像認識によって路面標示Bに示されている走行中の道路の制限速度の情報を認識することになる。なお、後方カメラ19による撮像では、道路標識は制限速度の情報が示されていない裏側しか撮像できず、制限速度の情報が認識できないので、路面標示を撮像した画像をもとに画像認識を行うものとする。
【0048】
図2に戻って、音声出力装置24は、スピーカ等から構成され、制御装置26の指示に基づいて、速度超過を知らせる警告音声などを出力する。よって、音声出力装置24は、請求項の警告部として機能する。
【0049】
また、センタ通信部25は、例えばネットワークを介して情報センタ2との間で通信を行い、情報センタ2との間でのデータの送受信を行う。よって、センタ通信部25は、請求項の通信部として機能する。なお、センタ通信部25は、例えば車両に搭載されるDCM(data communication module)等のテレマティクス通信に用いられる車載通信モジュールを通じてネットワークに接続する構成としてもよいし、例えばBluetooth(登録商標)等で接続した携帯電話機を通じてネットワークに接続する構成としてもよい。また、情報センタ2と通信可能な路側機との路車間通信を通じて情報センタ2との間で通信を行う構成としてもよい。
【0050】
制御装置26はCPU、ROM、RAM、バックアップRAM、I/O等(いずれも図示せず)よりなるマイクロコンピュータを主体として構成され、ROMに記憶された各種の制御プログラムを実行することで各種の処理を実行するものである。
【0051】
制御装置26は、画像認識装置20での画像認識で制限速度の情報を認識できた場合、車両3の走行中の道路の道路種別、車線数、幅員の情報(以下、道路条件情報と呼ぶ)を、地図データ入力器16を介して記憶媒体17中の地図データから取得し、認識できた制限速度の情報と取得した道路条件情報との対応関係を示すデータを制限速度データベース27に格納する処理を実行する。よって、制御装置26は、請求項の道路条件情報取得部として機能する。なお、制限速度データベース27は、データを記憶することが可能なメモリ等の記憶部であって、例えば電気的に書き換えが可能なEEPROM等によって構成することが可能である。また、記憶媒体17中の地図データに車線数の情報および幅員の情報がない場合には、区画線認識部22に指示を行って区画線認識部22での画像認識によって車線数や幅員を算出させ、区画線認識部22から車線数や幅員の情報を取得し、認識できた制限速度の情報と取得した道路条件情報との対応関係を示すデータを制限速度データベース27に格納する処理を実行する。
【0052】
そして、制御装置26は、これらの処理を様々な道路を通行しながら逐次繰り返していくことによって、認識できた制限速度の情報と取得した道路条件情報との対応関係の統計を取っていき、道路条件情報と制限速度の情報とに加えてこれらの道路条件情報と制限速度の情報との組み合わせの種類ごとの統計数も対応付けられたデータ(以下、対応関係データと呼ぶ)を作成する対応関係データ作成処理を実行する。よって、制御装置26は、請求項の対応関係データ作成部としても機能し、制限速度データベース27は請求項の対応関係データ格納部として機能する。
【0053】
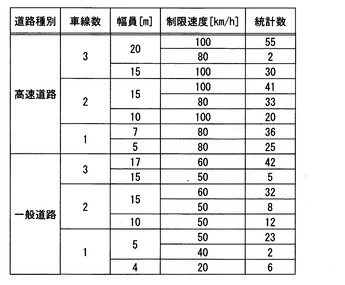
ここで、図5を用いて対応関係データの具体例について説明を行う。図5は、対応関係データの一例を示す図である。なお、図5では、道路種別が高速道路と一般道路との2種類である場合の例を示す。
【0054】
対応関係データ作成処理によって得られる対応関係データは、図5に示すように、道路条件情報の種類(具体的には道路種別、車線数、幅員の情報の組み合わせの種類)ごとに、前述の画像認識で認識できた制限速度の情報が対応付けられているとともに、その道路条件情報と制限速度の情報との組み合わせに該当した統計数も対応付けられている。一例を挙げると、図5に示す対応関係データでは、道路種別の情報「高速道路」、車線数の情報「3」、幅員の情報「20m」の組み合わせに対しては、制限速度の情報「100kn/h」および統計数「55」と制限速度の情報「80km/h」および統計数「2」とが対応付けられている。
【0055】
なお、図5に示す例では、道路種別として高速道路と一般道路との2種類のみを示しているが、必ずしもこれに限らず、道路種別に自動車専用道路等も含む構成としてもよい。また、対応関係データ中の車線数、幅員、制限速度の情報についても、図5に示す例に限らず、図5に示す例以外の値も含む構成としてもよい。
【0056】
また、制御装置26は、画像認識装置20での画像認識で制限速度の情報を認識できた場合には、位置検出器11の車速センサ14のセンサ信号をもとに車両3の車速の情報を取得するとともに、前方認識部21や後方認識部23で認識された車両3の走行中の道路の制限速度の情報が示す制限速度と車速センサ14のセンサ信号をもとに取得した車両3の車速の情報が示す車速とを比較し、車両3の車速が車両3の走行中の道路の制限速度を超過しているか否かを判定する第1速度超過判定処理を実行する。よって、制御装置26は、請求項の車速情報取得部としても機能する。
【0057】
そして、第1速度超過判定処理において、車両3の車速が車両3の走行中の道路の制限速度を超過していると判定した場合には、制御装置26は、音声出力装置24に指示を行って音声出力装置24から速度超過を知らせる警告音声などを出力させ、速度超過の警告を行わせる。
【0058】
なお、本実施形態では、前方カメラ18で撮像された画像をもとに前方認識部21で制限速度の情報を認識できなかったときのために、後方カメラ19で撮像された画像をもとに後方認識部23でも制限速度の情報の認識を行う構成となっているが、必ずしもこれに限らない。例えば、前方カメラ18および前方認識部21を速度超過警告装置1に備えず、後方カメラ19で撮像された画像をもとに後方認識部23でのみ制限速度の情報の認識を行う構成としてもよいし、後方カメラ19および後方認識部23を速度超過警告装置1に備えず、前方カメラ18で撮像された画像をもとに前方認識部21でのみ制限速度の情報の認識を行う構成としてもよい。また、前方カメラ18を速度超過警告装置1に備えない構成とした場合には、車線数や幅員の情報は、画像認識装置20での画像認識によらずに、記憶媒体17中の地図データから取得する構成とすればよい。
【0059】
さらに、制御装置26は、画像認識装置20での画像認識で制限速度の情報を認識できなかった場合には、車両3の走行中の道路の道路条件情報を、地図データ入力器16を介して記憶媒体17中の地図データから取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報および統計数の情報を得るデータ参照処理を実行する。また、制御装置26は、データ参照処理で得られた制限速度の情報や統計数の情報をもとに車両3の走行中の道路の制限速度を推定する制限速度推定処理を実行する。よって、制御装置26は、請求項のデータ参照部および制限速度推定部としても機能する。なお、データ参照処理および制限速度推定処理の詳細については後述する。
【0060】
続いて、制御装置26は、位置検出器11の車速センサ14のセンサ信号をもとに車両3の車速の情報を取得するとともに、制限速度推定処理で推定した制限速度(以下、推定制限速度と呼ぶ)と車速センサ14のセンサ信号をもとに取得した車両3の車速の情報が示す車速とを比較し、車両3の車速が推定制限速度を超過しているか否かを判定する第2速度超過判定処理を実行する。そして、第2速度超過判定処理において、車両3の車速が推定制限速度を超過していると判定した場合には、制御装置26は、音声出力装置24に指示を行って音声出力装置24から速度超過を知らせる警告音声などを出力させ、速度超過の警告を行わせる。よって、制御装置26は、請求項の警告判定部としても機能する。
【0061】
なお、位置検出器11、地図データ入力器16、および音声出力装置24については、車載ナビゲーション装置に備えられているものを利用する構成としてもよい。
【0062】
また、速度超過警告システム100では、各車両3の速度超過警告装置1は、対応関係データ作成処理で作成して制限速度データベース27に格納している対応関係データを、所定の期間ごとにセンタ通信部25から情報センタ2に向けて送信する。さらに、情報センタ2においては、各車両3から送信されてきた各対応関係データを集計して統合した新たな対応関係データを作成して、この新たな対応関係データを各車両3の速度超過警告装置1に配信する。そして、各車両3の速度超過警告装置1は、情報センタ2から配信されてきたこの新たな対応関係データを制限速度データベース27に上書きし、以降は、この新たな対応関係データをデータ参照処理に用いるものとする。
【0063】
なお、ここで言うところの所定の期間ごととは、1日ごとや1週間ごとなどの任意の時間単位であってもよいし、車両3のIG(イグニッション)スイッチがオンになるごとや車両3のACC(アクセサリ)スイッチがオンになるごとなどの状態変化単位であってもよい。
【0064】
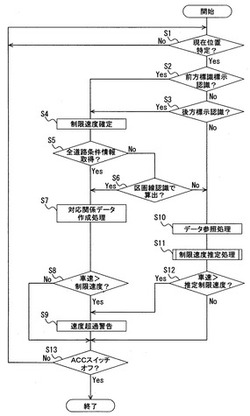
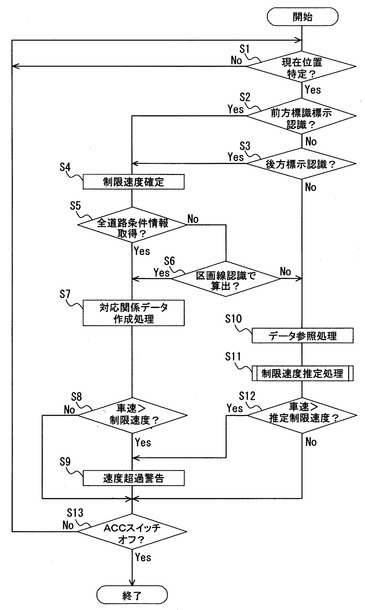
次に、図6を用いて、速度超過警告装置1の動作フローについての説明を行う。図6は、速度超過警告装置1の動作フローの一例を示すフローチャートである。なお、本フローは、例えば自車両のACCスイッチがオンされたときに開始される。また、図6のフローでは、説明の便宜上、情報センタ2との間でのデータの送受信に関する処理は省略している。
【0065】
まず、ステップS1では、制御装置26が車両3の現在位置の特定(つまり、現在位置特定)を行い、現在位置特定を行うことができた場合(ステップS1でYes)には、ステップS2に移る。また、現在位置特定を行うことができなかった場合(ステップS1でNo)には、ステップS1のフローを繰り返す。なお、制御装置26は、位置検出器11で算出した車両3の現在位置の情報を取得することによって車両3の現在位置特定を行うものとする。
【0066】
ステップS2では、前方カメラ18で撮像された車両3の走行中の道路の前方の画像をもとに前方認識部21が画像認識を行い、車両3の走行中の道路の前方に存在する道路標識や路面標示に示されている制限速度の情報を認識(つまり、前方標識標示認識)できた場合(ステップS2でYes)には、認識した制限速度の情報を制御装置26に送って、ステップS4に移る。また、前方標識標示認識できなかった場合(ステップS2でNo)には、ステップS3に移る。
【0067】
ステップS3では、後方カメラ19で撮像された車両3の走行中の道路の後方の画像をもとに後方認識部23が画像認識を行い、車両3の走行中の道路の後方に存在する路面標示に示されている制限速度の情報を認識(つまり、後方標示認識)できた場合(ステップS3でYes)には、認識した制限速度の情報を制御装置26に送って、ステップS4に移る。また、後方標示認識できなかった場合(ステップS3でNo)には、ステップS10に移る。
【0068】
ステップS4では、画像認識装置20で認識した制限速度の情報が示す制限速度を車両3の走行中の道路の制限速度として制御装置26が確定し、ステップS5に移る。ステップS5では、制御装置26が、特定された現在位置の道路種別、車線数、幅員の情報を、地図データ入力器16を介して記憶媒体17中の地図データから取得しようと試みる。そして、道路種別、車線数、幅員の情報(つまり、全道路条件情報)を取得できた場合(ステップS5でYes)には、ステップS7に移る。また、全道路条件情報を取得できなかった(つまり、道路種別、車線数、幅員の情報のうちの車線数および幅員の情報のいずれかでも取得できなかった)場合(ステップS5でNo)には、ステップS6に移る。
【0069】
ステップS6では、制御装置26が区画線認識部22に指示を行い、区画線認識部22での画像認識によって車両3の走行中の道路の前方に存在する区画線を認識させ、車両3の走行中の道路の車線数や幅員を算出させる。そして、区画線認識部22での区画線の認識により車両3の走行中の道路の車線数や幅員を算出(つまり、区画線認識で算出)できた場合(ステップS6でYes)には、ステップS7に移る。また、区画線認識で算出できなかった場合(ステップS6でNo)には、ステップS10に移る。
【0070】
ステップS7では、制御装置26が対応関係データ作成処理を実行し、ステップS8に移る。ステップS8では、制御装置26が第1速度超過判定処理を実行する。そして、第1速度超過判定処理において、車両3の車速が車両3の走行中の道路の制限速度を超過していると判定した場合(ステップS8でYes)には、ステップS9に移る。また、車両3の車速が車両3の走行中の道路の制限速度を超過していると判定しなかった場合(ステップS8でNo)には、ステップS13に移る。
【0071】
ステップS9では、制御装置26が音声出力装置24に指示を行って音声出力装置24で速度超過の警告を行わせ、ステップS13に移る。
【0072】
ステップS10では、データ参照処理を実行し、ステップS11に移る。データ参照処理では、前述したように、車両3の走行中の道路の道路条件情報を、地図データ入力器16を介して記憶媒体17中の地図データから取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報および統計数の情報を得る。ここで、図5の例を用いて具体例を挙げると、車両3の走行中の道路の道路条件情報が、道路種別の情報「一般道路」、車線数の情報「2」、幅員の情報「10m」の組み合わせだった場合には、制限速度の情報「50km/h」および統計数の情報「12」が得られることになる。また、車両3の走行中の道路の道路条件情報が、道路種別の情報「一般道路」、車線数の情報「2」、幅員の情報「15m」の組み合わせだった場合には、制限速度の情報「60km/h」および統計数の情報「32」と制限速度の情報「50km/h」および統計数の情報「8」との2種類の組が得られることになる。
【0073】
なお、データ参照処理において、道路条件情報のうちの車線数や幅員の情報を区画線認識部22での区画線の認識によって得る構成としてもよい。
【0074】
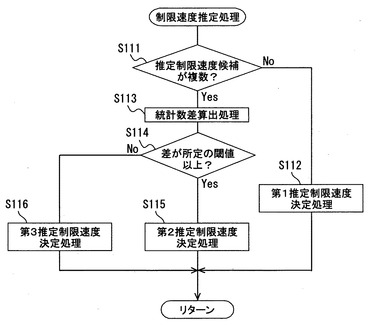
ステップS11では、制限速度推定処理を行ってステップS12に移る。ここで、図7のフローチャートを用いて、制限速度推定処理の概略について説明を行う。なお、図7は、制限速度推定処理の動作フローの一例を示すフローチャートである。
【0075】
まず、ステップS111では、データ参照処理によって制限速度の情報および統計数の情報の組が複数得られたか否かを制御装置26が判定する。そして、データ参照処理によって制限速度の情報および統計数の情報の組が複数得られた(つまり、推定制限速度候補が複数)と判定した場合(ステップS111でYes)には、ステップS113に移る。また、推定制限速度候補が複数と判定しなかった場合(ステップS111でNo)には、ステップS112に移る。
【0076】
ステップS112では、第1推定制限速度決定処理を行って、推定制限速度を決定し、ステップS12に移る。第1推定制限速度決定処理では、データ参照処理によって得られた1組の制限速度の情報および統計数の情報の組のうちの制限速度の情報が示す制限速度を推定制限速度として制御装置26が決定する。
【0077】
ステップS113では、制御装置26が統計数差算出処理を行って、ステップS114に移る。統計数差算出処理では、データ参照処理によって得られた複数組の制限速度の情報および統計数の情報の組のうちの統計数が1番目に多い組と統計数が2番目に多い組とを選択する。そして、統計数が1番目に多い制限速度の情報の統計数と統計数が2番目に多い制限速度の情報の統計数との差を算出する。
【0078】
ステップS114では、統計数が1番目に多い制限速度の情報の統計数と統計数が2番目に多い制限速度の情報の統計数との差が所定の閾値以上であるか否かを制御装置26が判定する。そして、差が所定の閾値以上であると判定した場合(ステップS114でYes)には、ステップS115に移る。また、差が所定の閾値以上であると判定しなかった場合(ステップS114でNo)には、ステップS116に移る。なお、ここで言うところの所定の閾値とは、統計数が1番目に多い制限速度の情報の統計数が、統計数が2番目に多い制限速度の情報の統計数の数倍に達するなど、統計数が1番目に多い制限速度の情報の信憑性が十分に高いと考えられる程度に大きな統計数の開きに該当する値であって、任意に設定可能な値である。
【0079】
ステップS115では、第2推定制限速度決定処理を行って、推定制限速度を決定し、ステップS12に移る。第2推定制限速度決定処理では、データ参照処理によって得られた複数組の制限速度の情報および統計数の情報の組のうちの統計数が1番目に多い組の制限速度の情報が示す制限速度を推定制限速度として制御装置26が決定する。
【0080】
また、ステップS116では、第3推定制限速度決定処理を行って、推定制限速度を決定し、ステップS12に移る。第3推定制限速度決定処理では、データ参照処理によって得られた複数組の制限速度の情報および統計数の情報の組の中の、統計数が1番目に多い組の制限速度の情報が示す制限速度と統計数が2番目に多い組の制限速度の情報が示す制限速度とのうち、値がより低い方の制限速度を推定制限速度として制御装置26が決定する。
【0081】
図6に戻って、ステップS12では、制御装置26が第2速度超過判定処理を実行する。そして、第2速度超過判定処理において、車両3の車速が車両3の走行中の道路の推定制限速度を超過していると判定した場合(ステップS12でYes)には、ステップS9に移る。また、車両3の車速が車両3の走行中の道路の推定制限速度を超過していると判定しなかった場合(ステップS12でNo)には、ステップS13に移る。
【0082】
ステップS13では、自車両のACCスイッチがオフになった場合(ステップS13でYes)には、フローを終了する。また、自車両のACCスイッチがオフになっていない場合(ステップS13でNo)には、ステップS1に戻ってフローを繰り返す。
【0083】
なお、本フローでは、ACCスイッチがオンされたときにフローが開始され、ACCスイッチがオフされたときにフローが終了する構成を示したが、必ずしもこれに限らない。例えば、IGスイッチがオンされたときにフローが開始され、IGスイッチがオフされたときにフローが終了する構成としてもよい。
【0084】
制限速度は、地域ごとに自由に設定されているが、車線数、歩道の有り無し、中央分離帯の有り無し等の各項目によって制限速度を定める規制速度算出要領に則って制限速度が設定されている地域も多い。また、制限速度を定める上で、規制速度算出要領の各項目の中でも車線数(ひいては幅員)の影響が特に大きい。よって、車線数や幅員と実際の制限速度との間には特に強い相関があると言える。また、制限速度は、高速道路、自動車専用道路、一般道路といった道路種別によって設定され得る範囲が大まかに決まっている。よって、道路種別と実際の制限速度との間にも特に強い相関があると言える。
【0085】
従って、以上の構成のように、前方カメラ18や後方カメラ19で撮像した画像に基づく画像認識によって認識することができた道路標識や路面標示の制限速度の情報と車両3の走行中の道路の道路条件情報(道路種別の情報と車線数の情報および幅員の情報とを組み合わせた情報)との対応付けを、統計をとりながら繰り返すことによって得られた対応関係データにおいては、実際の道路条件情報と実際の制限速度との対応がより精度良くなされる可能性が高い。よって、以上の構成によれば、車両3の走行中の道路の道路条件情報をもとに、この対応関係データを参照して、車両3の走行中の道路の制限速度をより精度良く推定することが可能になる。
【0086】
また、以上の構成によれば、車両3の走行中の道路の道路種別、車線数、および幅員の情報を取得しさえすれば、車両3の走行中の道路の制限速度をより精度良く推定することが可能になるので、制限速度の情報が含まれる地図データが利用できなかったり、道路標識や路面標示の画像認識による車両3の走行中の道路の制限速度の特定に失敗したりした場合であっても、車両3の走行中の道路の制限速度をより精度良く推定することが可能になる。従って、以上の構成によれば、より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても、走行中の道路の制限速度をより精度良く推定することが可能になる。よって、速度超過警告装置1は、請求項の運転支援装置として機能する。
【0087】
さらに、以上の構成によれば、車両3の速度が制限速度や推定制限速度を超過していると制御装置26で判定した場合に速度超過を知らせる警告を行うので、ドライバーの不注意による速度超過を防止することが可能になる。
【0088】
また、以上の構成によれば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が小さいときのような、統計数が1番目に多い制限速度の情報の信憑性がより低い場合であっても、値がより低い方の制限速度を車両3の走行中の道路の推定制限速度として決定するので、推定が誤っていた場合であっても推定制限速度を実際の制限速度よりも高く推定する可能性を低減することができる。従って、車両3の速度が実際の制限速度を超過している場合にも警告を行わない状況が生じる可能性を低減することが可能になり、ドライバーの不注意による速度超過をより防止することが可能になる。
【0089】
さらに、以上の構成によれば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が大きいときのような、統計数が1番目に多い制限速度の情報の信憑性がより高い場合には、統計数が1番目に多い制限速度の情報が示す制限速度を車両3の走行中の道路の制限速度として優先して推定することが可能になるので、車両3の走行中の道路の制限速度を実際の制限速度よりも高く推定する可能性が低くなり、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0090】
また、本発明が適用された速度超過警告システム100によれば、各車両3に搭載された各速度超過警告装置1でそれぞれ作成された対応関係データを情報センタ2で統合して新たな対応関係データを作成するので、1つの速度超過警告装置1のみで作成された対応関係データよりも全体の統計数が増し、実際の道路の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。そして、この新たな対応関係データを速度超過警告装置1の制限速度データベース27に対応関係データとして格納し、この新たな対応関係データを参照して車両3の走行中の道路の制限速度の推定が行われることになるので、走行中の道路の制限速度をさらに精度良く推定することが可能になる。
【0091】
なお、各車両3の現在位置の情報をもとに情報センタ2側で当該現在位置の道路の制限速度の情報を調べて各車両3に配信する構成を想定した場合には、情報センタ2側で各車両に個別の処理を行うため、情報センタ2の負荷が増大する問題が生じる。また、他にも、各車両3の進行に合わせて頻繁に各車両3それぞれの走行中の道路の制限速度の情報を個別に配信しなければならないので、情報センタ2と各車両3との間での通信が混み合ってしまい、通信網への負荷が増大する問題も生じる。
【0092】
これに対して、本発明が適用された速度超過警告システム100の構成によれば、上述の新たな対応関係データを各車両3の速度超過警告装置1に一律に送信(配信)するだけで、各速度超過警告装置1において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ2側の処理の負荷を抑えることや通信網への負荷の増大を抑えることが可能になる。よって、速度超過警告システム100は、請求項の運転支援システムとして機能する。
【0093】
なお、前述の実施形態では、対応関係データを速度超過警告装置1の制御装置26で作成する構成を示したが、必ずしもこれに限らない。例えば、画像認識装置20で認識できた制限速度の情報と地図データ入力器16を介して記憶媒体17中の地図データから取得したこの制限速度の情報が認識できた地点の道路条件情報との組(以下、組み合わせ情報と呼ぶ)を制御装置26がセンタ通信部25を介して情報センタ2に逐次送信し、逐次送信されてくるこの組み合わせ情報をもとに統計を取りながら情報センタ2で対応関係データを作成する構成としてもよい。この場合には、情報センタ2で作成した対応関係データを、センタ通信部25を介して速度超過警告装置1が取得して制限速度データベース27に格納し、この情報センタ2由来の対応関係データをデータ参照処理に用いる構成とすればよい。
【0094】
以上の構成によれば、各車両3に搭載された速度超過警告装置1でそれぞれ画像認識によって認識された制限速度の情報とその制限速度の情報を認識することができた際に走行中の道路の道路条件情報との組み合わせ情報を情報センタ2で統合して新たな対応関係データを作成するので、1つの速度超過警告装置1のみで対応関係データを作成する場合よりも全体の統計数が増し、実際の道路の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。従って、以上の構成によっても、走行中の道路の制限速度をさらに精度良く推定することが可能になる。また、以上の構成によれば、上述の新たな対応関係データを各車両3の速度超過警告装置1に一律に送信(配信)するだけで、各速度超過警告装置1において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ2側の処理の負荷を抑えることができる。
【0095】
また、前述の実施形態では、速度超過警告装置1が情報センタ2とセンタ通信部25を介して通信を行うことによって情報センタ2から対応関係データを受信(取得)する構成を示したが、必ずしもこれに限らない。例えば、速度超過警告装置1がセンタ通信部25を備えず、情報センタ2から対応関係データを受信(取得)しない構成としてもよい。
【0096】
さらに、前述の実施形態では、速度超過警告装置1の画像認識装置20で認識できた制限速度の情報と地図データ入力器16を介して記憶媒体17中の地図データから取得したこの制限速度の情報が認識できた地点の道路条件情報とをもとに作成された対応関係データをデータ参照処理に用いる構成を示したが、必ずしもこれに限らない。例えば、速度超過警告装置1以外の手段(例えば人手など)によって、道路条件情報とその道路条件情報において設定されていることが多い制限速度の情報との対応付けを行って作成した対応関係データベースを予め制限速度データベース27に格納しておき、この予め作成された対応関係データをデータ参照処理に用いる構成としてもよい。この場合、速度超過警告装置1において対応関係データ作成処理を行わない構成としてもよい。なお、速度超過警告装置1において対応関係データ作成処理を行わず、上述の予め作成された対応関係データをデータ参照処理に用いる構成とした場合には、制限速度データベース27は読み出し専用のROM等のメモリで構成してもよい。
【0097】
また、前述の実施形態では、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときに、第2推定制限速度決定処理や第3推定制限速度決定処理を行って推定制限速度を決定する構成を示したが、必ずしもこれに限らない。例えば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときに、統計数が1番目に多い組の制限速度の情報が示す制限速度を常に推定制限速度として決定する構成としてもよい。また、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときに、統計数が1番目に多い組の制限速度の情報が示す制限速度と統計数が2番目に多い組の制限速度の情報が示す制限速度とのうち、値がより低い方の制限速度を常に推定制限速度として決定する構成としてもよい。
【0098】
なお、前述の実施形態では、音声出力装置24によって速度超過を知らせる警告を行う構成を示したが、必ずしもこれに限らない。例えば、液晶ディスプレイ等のディスプレイに速度超過を知らせる警告表示を行うことによって警告を行う構成としてもよいし、LED等の点灯を行うことによって速度超過を知らせる警告を行う構成としてもよい。また、速度超過警告装置1に含まれない音声出力装置や表示装置などによって速度超過を知らせる警告を行う構成としてもよい。
【0099】
また、前述の実施形態では、道路条件情報が道路種別の情報、車線数の情報、および幅員の情報からなる構成を示したが、必ずしもこれに限らない。前述したように、実際の制限速度との間に特に強い相関があるのは、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とであるため、道路条件情報は、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報であればよい。さらに、道路条件情報に道路種別の情報、車線数の情報、および幅員の情報以外の情報を含む構成であってもよく、例えば、実際の制限速度との間に強い相関がある歩道の有無の情報、中央分離帯の有無の情報、交差点の数の情報などをさらに含む構成としてもよい。
【0100】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0101】
1 速度超過警告装置(運転支援装置)、2 情報センタ、3 車両、11 位置検出器、12 加速度センサ、13 ジャイロスコープ、14 車速センサ、15 GPS受信機、16 地図データ入力器、17 記憶媒体(記憶装置)、18 前方カメラ(撮像部)、19 後方カメラ(撮像部)、20 画像認識装置(画像認識部)、21 前方認識部、22 区画線認識部、23 後方認識部、24 音声出力装置(警告部)、25 センタ通信部(通信部)、26 制御装置(道路条件情報取得部、対応関係データ作成部、車速情報取得部、データ参照部、制限速度推定部、警告判定部)、27 制限速度データベース(対応関係データ格納部)、100 速度超過警告システム(運転支援システム)
【技術分野】
【0001】
本発明は、走行中の道路の制限速度の情報を得る運転支援装置および運転支援システムに関するものである。
【背景技術】
【0002】
従来から、ドライバーの不注意による速度超過を防止するための技術が提案されている。例えば、特許文献1には、ナビゲーションシステムで利用されるCD−ROM等の記憶手段に記憶されている地図情報や自車両の前方を撮像するカメラで撮像した道路標識や路面標示の認識結果から制限速度の情報を得て、得られた制限速度の情報をもとに速度超過を判定し、速度超過の場合には警報を行う技術が開示されている。
【0003】
詳しくは、特許文献1に開示の技術では、前述の地図情報から読み込んだ自車両の走行中の道路の制限速度(以下、制限速度イとする)の情報と、前述のカメラで撮像した道路標識や路面標示の認識結果から得た制限速度(以下、制限速度ロとする)の情報とを比較し、制限速度イと制限速度ロとが一致すれば、その制限速度を採用し、制限速度イと制限速度ロとが不一致であれば、一方を制限速度として採用し、採用された制限速度の情報をもとに速度超過を判定して、速度超過の場合には警報を行う。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−128790号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示の技術では、制限速度の情報が含まれる地図情報が記憶手段に記憶されている必要がある。制限速度の情報が含まれる地図情報は近年になって採用され始めたものであるため、制限速度の情報が含まれる地図情報を採用していないナビゲーションシステムは未だに多く、この技術を適用できない場合が多い。つまり、特許文献1に開示の技術は、汎用性に欠けるという問題点を有している。
【0006】
なお、制限速度の情報が含まれていない地図情報に制限速度の情報を新たに追加することも考えられるが、制限速度の情報が含まれていない地図情報に制限速度の情報を新たに追加するには、多大なコストが発生してしまうため現実的でない。
【0007】
さらに、特許文献1に開示の技術では、地図情報中で制限速度の情報が存在しない道路を走行しており、且つ、カメラで撮像した道路標識や路面標示の画像認識に失敗した場合には、走行中の道路の制限速度が特定できないという問題点を有している。画像認識には、一般的にテンプレートマッチングが用いられるが、テンプレートマッチングは用意するテンプレートにより認識率が大きく左右され、例えば、標識が傾いてカメラに映ったり、標識自体が色あせていて画像処理で輪郭がうまく抽出できなかったり、雨天等で撮像条件が悪かったりした場合には、画像認識に失敗することが大いに考えられる。
【0008】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することを可能にする運転支援装置および運転支援システムを提供することにある。
【課題を解決するための手段】
【0009】
請求項1の運転支援装置は、上記課題を解決するために、車両に搭載される運転支援装置であって、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している対応関係データ格納部と、前記車両の走行中の道路の前記道路条件情報を取得する道路条件情報取得部と、前記道路条件情報取得部で取得した道路条件情報をもとに前記対応関係データ格納部に格納されている前記対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得るデータ参照部と、前記データ参照部で得られた制限速度の情報をもとに当該走行中の道路の制限速度を推定する制限速度推定部と、を備えることを特徴としている。
【0010】
これによれば、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを取得しさえすれば、対応関係データを参照して、これらの情報に対応する制限速度の情報を得ることができる。よって、例えば、対応関係データにおいて実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応が精度良くなされていれば、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報をもとに、この対応関係データを参照して、走行中の道路の制限速度を精度良く推定することができる。従って、以上の構成によれば、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0011】
また、以上の構成によれば、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを取得しさえすれば、走行中の道路の制限速度をより精度良く推定することが可能になるので、制限速度の情報が含まれる地図情報を利用したり、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行ったりしなくても、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0012】
従って、以上の構成によれば、より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することが可能になる。
【0013】
また、請求項2の運転支援装置では、前記車両の速度の情報を取得する車速情報取得部と、警告を行う警告部と、前記制限速度推定部で推定した制限速度を前記車速情報取得部で取得した速度の情報が示す速度が超過していると判定した場合に前記警告部で警告を行わせる警告判定部と、をさらに備えることを特徴としている。
【0014】
これによれば、車両の速度が制限速度推定部で推定した制限速度を超過していると判定した場合に警告を行うので、ドライバーの不注意による速度超過をより防止することが可能になる。
【0015】
また、請求項3の運転支援装置では、前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、前記画像認識部で制限速度の情報を認識することができた場合に前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報を当該制限速度の情報に対応付ける処理を、統計をとりながら繰り返していくことによって、前記道路条件情報と前記制限速度の情報とに加えて統計数も対応付けられた前記対応関係データを作成し、作成したこの対応関係データを前記対応関係データ格納部に格納される対応関係データとする対応関係データ作成部と、をさらに備えることを特徴としている。
【0016】
制限速度は、地域ごとに自由に設定されているが、車線数、歩道の有り無し、中央分離帯の有り無し等の各項目によって制限速度を定める規制速度算出要領に則って制限速度が設定されている地域も多い。また、制限速度を定める上で、規制速度算出要領の各項目の中でも車線数(ひいては幅員)の影響が特に大きい。よって、車線数や幅員と実際の制限速度との間には特に強い相関があると言える。また、制限速度は、高速道路、自動車専用道路、一般道路といった道路種別によって設定され得る範囲が大まかに決まっている。よって、道路種別と実際の制限速度との間にも特に強い相関があると言える。
【0017】
従って、以上の構成のように、撮像部で撮像した画像に基づく画像認識によって認識することができた道路標識や路面標示の制限速度の情報と走行中の道路の道路条件情報(つまり、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報)との対応付けを、統計をとりながら繰り返すことによって得られた対応関係データにおいては、実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がより精度良くなされている可能性が高い。
【0018】
よって、以上の構成によれば、対応関係データにおいて実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がより精度良くなされている可能性が高くなるので、車両の走行中の道路の道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報をもとに、この対応関係データを参照して、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0019】
また、請求項4の運転支援装置では、前記制限速度推定部は、同一の前記道路条件情報に対して複数種類の制限速度の情報が前記データ参照部で得られた場合には、当該複数種類の制限速度の情報のうちの、前記統計数が1番目に多い制限速度の情報が示す制限速度と前記統計数が2番目に多い制限速度の情報が示す制限速度とを比較し、値が低い方の制限速度を前記車両の走行中の道路の制限速度として推定することを特徴としている。
【0020】
これによれば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照部で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が小さいときのような、統計数が1番目に多い制限速度の情報の信憑性がより低い場合であっても、値がより低い方の制限速度を車両の走行中の道路の制限速度として推定するので、推定が誤っていた場合であっても制限速度を実際の制限速度よりも高く推定する可能性を低減することができる。従って、車両の速度が実際の制限速度を超過している場合にも警告を行わない状況が生じる可能性を低減することが可能になり、ドライバーの不注意による速度超過をより防止することが可能になる。
【0021】
また、請求項5の運転支援装置では、前記制限速度推定部は、前記統計数が1番目に多い制限速度の情報の統計数と前記統計数が2番目に多い制限速度の情報の統計数との差が所定の閾値以上であった場合には、前記統計数が1番目に多い制限速度の情報が示す制限速度を前記車両の走行中の道路の制限速度として優先して推定することを特徴とする。
【0022】
同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照部で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が大きいときのような、統計数が1番目に多い制限速度の情報の信憑性がより高い場合には、走行中の道路の制限速度を実際の制限速度よりも高く推定する可能性が低い。よって、以上の構成によれば、統計数が1番目に多い制限速度の情報の信憑性がより高い場合には、統計数が1番目に多い制限速度の情報が示す制限速度を車両の走行中の道路の制限速度として優先して推定することが可能になり、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0023】
また、請求項6の運転支援装置では、前記運転支援装置は、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限含む地図データを記憶する記憶装置から当該地図データを取得するものであって、前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを、前記記憶装置に記憶されている地図データから取得することを特徴としている。
【0024】
この請求項6のように、運転支援装置が、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限含む地図データを記憶する記憶装置から当該地図データを取得するものであって、道路条件情報取得部が、最低限でも道路条件情報のうちの道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを、記憶装置に記憶されている地図データから取得する態様としてもよい。
【0025】
また、請求項7の運転支援装置では、前記運転支援装置は、道路種別の情報を少なくとも含む地図データを記憶する記憶装置から当該地図データを取得するものであって、前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの道路種別の情報を、前記記憶装置に記憶されている地図データから取得するとともに、前記車線数の情報および前記幅員の情報のうちの少なくともいずれかの情報については、前記撮像部で撮像した画像に基づく画像認識によって取得することを特徴としている。
【0026】
この請求項7のように、運転支援装置が、道路種別の情報を少なくとも含む地図データを記憶する記憶装置から当該地図データを取得するものであって、道路条件情報取得部が、最低限でも道路条件情報のうちの道路種別の情報を、記憶装置に記憶されている地図データから取得するとともに、車線数の情報および幅員の情報のうちの少なくともいずれかの情報については、撮像部で撮像した画像に基づく画像認識によって取得する態様としてもよい。
【0027】
また、請求項8の運転支援システムは、上記課題を解決するために、前記のいずれかの運転支援装置を備えた複数台の車両と、情報センタと、を含み、前記運転支援装置は、前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、前記情報センタとの間でデータの送受信を行う通信部と、をさらに備え、前記画像認識部で制限速度の情報を認識することができた場合に、前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報と当該制限速度の情報とを組み合わせた情報である組み合わせ情報を前記通信部によって前記情報センタに送信するとともに、前記情報センタは、複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる前記組み合わせ情報を統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴としている。
【0028】
これによれば、各車両に搭載された各運転支援装置でそれぞれ画像認識によって認識された制限速度の情報とその制限速度の情報を認識することができた際に走行中の道路の道路条件情報との組み合わせ情報を情報センタで統合して新たな対応関係データを作成するので、1つの運転支援装置のみで対応関係データを作成する場合よりも全体の統計数が増し、実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。そして、この新たな対応関係データを運転支援装置の対応関係データ格納部に対応関係データとして格納し、この新たな対応関係データを参照して走行中の道路の制限速度の推定が行われることになるので、走行中の道路の制限速度をさらに精度良く推定することが可能になる。
【0029】
また、各車両の現在位置の情報をもとに情報センタ側で当該現在位置の道路の制限速度の情報を調べて各車両に配信する構成を想定した場合には、情報センタ側で各車両に個別の処理を行うため、情報センタの負荷が増大する問題が生じる。
【0030】
これに対して、請求項8の構成によれば、上述の新たな対応関係データを各車両の運転支援装置に一律に送信(配信)するだけで、各運転支援装置において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ側の処理の負荷を抑えることができる。
【0031】
また、請求項9の運転支援システムは、上記課題を解決するために、前記のいずれかの運転支援装置を備えた複数台の車両と、情報センタと、を含み、前記運転支援装置は、前記情報センタとの間でデータの送受信を行う通信部をさらに備え、前記対応関係データ作成部で作成した対応関係データを前記通信部によって前記情報センタに送信するとともに、前記情報センタは、複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる対応関係データを統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴としている。
【0032】
これによれば、各車両に搭載された各運転支援装置でそれぞれ作成された対応関係データを情報センタで統合して新たな対応関係データを作成するので、1つの運転支援装置のみで作成された対応関係データよりも全体の統計数が増し、実際の道路の道路種別、車線数、幅員等の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。そして、この新たな対応関係データを運転支援装置の対応関係データ格納部に対応関係データとして格納し、この新たな対応関係データを参照して走行中の道路の制限速度の推定が行われることになるので、走行中の道路の制限速度をさらに精度良く推定することが可能になる。
【0033】
また、各車両の現在位置の情報をもとに情報センタ側で当該現在位置の道路の制限速度の情報を調べて各車両に配信する構成を想定した場合には、情報センタ側で各車両に個別の処理を行うため、情報センタの負荷が増大する問題が生じる。また、他にも、各車両の進行に合わせて頻繁に各車両それぞれの走行中の道路の制限速度の情報を個別に配信しなければならないので、情報センタと各車両との間での通信が混み合ってしまい、通信網への負荷が増大する問題も生じる。
【0034】
これに対して、請求項9の構成によれば、上述の新たな対応関係データを各車両の運転支援装置に一律に送信(配信)するだけで、各運転支援装置において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ側の処理の負荷を抑えることができる。また、請求項9の構成によれば、上述の新たな対応関係データをもとに各車両の運転支援装置で自律的に車両の進行に合わせて走行中の道路の制限速度を精度良く推定することが可能であるので、通信網への負荷が増大し過ぎるおそれもない。
【図面の簡単な説明】
【0035】
【図1】速度超過警告システム100の概略的な構成を示すブロック図である。
【図2】速度超過警告装置1の概略的な構成を示すブロック図である。
【図3】片側2車線の場合の道路状況を示す一例である。
【図4】片側2車線の場合の道路状況を示す一例である。
【図5】対応関係データの一例を示す図である。
【図6】速度超過警告装置1の動作フローの一例を示すフローチャートである。
【図7】制限速度推定処理の動作フローの一例を示すフローチャートである。
【発明を実施するための形態】
【0036】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された速度超過警告システム100の概略的な構成を示すブロック図である。図1に示す速度超過警告システム100は、速度超過警告装置1を搭載した複数の車両3および情報センタ2を含んでいる。
【0037】
情報センタ2は、例えばサーバから構成されており、ネットワーク(つまり、通信網)を介して複数の車両3の速度超過警告装置1と通信することが可能な通信装置、車両3の速度超過警告装置1から送信されてくる後述の対応関係データを統合した情報を格納する記憶装置、および通信や対応関係データの統合の処理等を制御する制御装置などを備えている。なお、情報センタ2は、1つのサーバからなるものであってもよいし、複数のサーバからなっているものであってもよい。
【0038】
速度超過警告装置1は、自動車等の車両に搭載されるものであって、本実施形態では、自動車としての車両3に搭載されるものとする。速度超過警告装置1は、例えば、情報センタ2とネットワークを介して通信を行う機能、ならびに車両3の走行中の道路の制限速度の情報を後述する画像認識や後述する対応関係データを利用した推定によって得たりする機能等を有している。なお、図1では、速度超過警告システム100に速度超過警告装置1を搭載した3台の車両3を含む構成を示したが、必ずしもこれに限らない。速度超過警告装置1を搭載した車両3は、速度超過警告システム100に複数台含まれていればよく、3台以外の複数台の車両3が含まれている構成であってもよい。
【0039】
ここで、図2を用いて速度超過警告装置1の概略的な構成について説明を行う。図2は、速度超過警告装置1の概略的な構成を示すブロック図である。図2に示すように速度超過警告装置1は、位置検出器11、地図データ入力器16、前方カメラ18、後方カメラ19、画像認識装置20、音声出力装置24、センタ通信部25、制限速度データベース27、およびこれらと接続された制御装置26を備えている。
【0040】
位置検出器11は、周知の加速度センサ12、ジャイロスコープ13、車速センサ14、および衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有しており、ハイブリッド航法により車両3の現在位置を算出する。なお、これらのセンサ等12〜15は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。また、位置検出器11は、精度によっては上述した内の一部で構成してもよく、さらにステアリングの回転センサ、各転動輪の車両センサ、地磁気センサ等を用いてもよい。
【0041】
地図データ入力器16は、記憶媒体17が装着され、その記憶媒体17に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。よって、記憶媒体17は、請求項の記憶装置として機能する。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別(高速道路、一般道路など)、道路幅員(つまり、幅員)、車線数、および右折・左折専用車線の有無とその専用車線の数等の各データから構成される。
【0042】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。なお、記憶媒体17としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0043】
前方カメラ18は、車両3の前方を撮像するカメラであって、後方カメラ19は、車両3の後方を撮像するカメラである。なお、前方カメラ18および後方カメラ19としては、例えばCCDカメラを用いることができる。よって、前方カメラ18および後方カメラ19は、請求項の撮像部として機能する。
【0044】
画像認識装置20は、前方認識部21、区画線認識部22、および後方認識部23を備えている。そして、画像認識装置20は、前方カメラ18や後方カメラ19で撮像された画像をもとに画像認識を行い、道路標識や路面標示に示されている制限速度の情報を認識したり、車両通行帯境界線を示す区画線(白い実線、白い破線、黄色い実線等)や車道外側線を示す区画線(白い実線等)を認識することによって車線数や幅員を認識したりする。よって、画像認識装置20は、請求項の画像認識部として機能する。
【0045】
詳しくは、前方認識部21は、前方カメラ18で撮像された画像をもとに画像認識を行い、車両3の走行中の道路の道路標識や路面標示に示されている制限速度の情報を認識し、認識した制限速度の情報を制御装置26に送る。また、区画線認識部22は、前方カメラ18で撮像された画像をもとに画像認識を行い、車両通行帯境界線を示す区画線や車道外側線を示す区画線を認識し、走行中の道路の車線数や幅員を算出する。そして、算出した車線数や幅員の情報を制御装置26に送る。さらに、後方認識部21は、後方カメラ19で撮像された画像をもとに画像認識を行い、車両3の走行中の道路の路面標示に示されている制限速度の情報を認識し、認識した制限速度の情報を制御装置26に送る。なお、前方認識部21、区画線認識部22、および後方認識部23で行う画像認識については、例えばテンプレートマッチングを用いる方法などの周知の方法を用いて行うものとする。なお、ここで言うところの制限速度とは、道路交通法第22条の道路標識等により指定する最高速度を示しており、他には規制速度とも言い換えることができる。
【0046】
ここで、図3および図4を用いて、前方カメラ18で撮像された画像をもとに画像認識を行って制限速度の情報を認識する具体例と後方カメラ19で撮像された画像をもとに画像認識を行って制限速度の情報を認識する具体例とを示す。なお、図3および図4は、片側2車線の場合の道路状況を示す一例である。
【0047】
図3に示すように、道路脇などに立てられている道路標識Aや道路にペイントされている路面標示Bを前方カメラ18で撮像した場合には、画像認識によって道路標識Aや路面標示Bに示されている走行中の道路の制限速度の情報(図3の例では50km/h)を認識することになる。また、前方カメラ18で撮像した画像から路面標示Bの制限速度の情報が認識できなかった場合には、図4に示すように、後方カメラ19で路面標示Bを撮像し、画像認識によって路面標示Bに示されている走行中の道路の制限速度の情報を認識することになる。なお、後方カメラ19による撮像では、道路標識は制限速度の情報が示されていない裏側しか撮像できず、制限速度の情報が認識できないので、路面標示を撮像した画像をもとに画像認識を行うものとする。
【0048】
図2に戻って、音声出力装置24は、スピーカ等から構成され、制御装置26の指示に基づいて、速度超過を知らせる警告音声などを出力する。よって、音声出力装置24は、請求項の警告部として機能する。
【0049】
また、センタ通信部25は、例えばネットワークを介して情報センタ2との間で通信を行い、情報センタ2との間でのデータの送受信を行う。よって、センタ通信部25は、請求項の通信部として機能する。なお、センタ通信部25は、例えば車両に搭載されるDCM(data communication module)等のテレマティクス通信に用いられる車載通信モジュールを通じてネットワークに接続する構成としてもよいし、例えばBluetooth(登録商標)等で接続した携帯電話機を通じてネットワークに接続する構成としてもよい。また、情報センタ2と通信可能な路側機との路車間通信を通じて情報センタ2との間で通信を行う構成としてもよい。
【0050】
制御装置26はCPU、ROM、RAM、バックアップRAM、I/O等(いずれも図示せず)よりなるマイクロコンピュータを主体として構成され、ROMに記憶された各種の制御プログラムを実行することで各種の処理を実行するものである。
【0051】
制御装置26は、画像認識装置20での画像認識で制限速度の情報を認識できた場合、車両3の走行中の道路の道路種別、車線数、幅員の情報(以下、道路条件情報と呼ぶ)を、地図データ入力器16を介して記憶媒体17中の地図データから取得し、認識できた制限速度の情報と取得した道路条件情報との対応関係を示すデータを制限速度データベース27に格納する処理を実行する。よって、制御装置26は、請求項の道路条件情報取得部として機能する。なお、制限速度データベース27は、データを記憶することが可能なメモリ等の記憶部であって、例えば電気的に書き換えが可能なEEPROM等によって構成することが可能である。また、記憶媒体17中の地図データに車線数の情報および幅員の情報がない場合には、区画線認識部22に指示を行って区画線認識部22での画像認識によって車線数や幅員を算出させ、区画線認識部22から車線数や幅員の情報を取得し、認識できた制限速度の情報と取得した道路条件情報との対応関係を示すデータを制限速度データベース27に格納する処理を実行する。
【0052】
そして、制御装置26は、これらの処理を様々な道路を通行しながら逐次繰り返していくことによって、認識できた制限速度の情報と取得した道路条件情報との対応関係の統計を取っていき、道路条件情報と制限速度の情報とに加えてこれらの道路条件情報と制限速度の情報との組み合わせの種類ごとの統計数も対応付けられたデータ(以下、対応関係データと呼ぶ)を作成する対応関係データ作成処理を実行する。よって、制御装置26は、請求項の対応関係データ作成部としても機能し、制限速度データベース27は請求項の対応関係データ格納部として機能する。
【0053】
ここで、図5を用いて対応関係データの具体例について説明を行う。図5は、対応関係データの一例を示す図である。なお、図5では、道路種別が高速道路と一般道路との2種類である場合の例を示す。
【0054】
対応関係データ作成処理によって得られる対応関係データは、図5に示すように、道路条件情報の種類(具体的には道路種別、車線数、幅員の情報の組み合わせの種類)ごとに、前述の画像認識で認識できた制限速度の情報が対応付けられているとともに、その道路条件情報と制限速度の情報との組み合わせに該当した統計数も対応付けられている。一例を挙げると、図5に示す対応関係データでは、道路種別の情報「高速道路」、車線数の情報「3」、幅員の情報「20m」の組み合わせに対しては、制限速度の情報「100kn/h」および統計数「55」と制限速度の情報「80km/h」および統計数「2」とが対応付けられている。
【0055】
なお、図5に示す例では、道路種別として高速道路と一般道路との2種類のみを示しているが、必ずしもこれに限らず、道路種別に自動車専用道路等も含む構成としてもよい。また、対応関係データ中の車線数、幅員、制限速度の情報についても、図5に示す例に限らず、図5に示す例以外の値も含む構成としてもよい。
【0056】
また、制御装置26は、画像認識装置20での画像認識で制限速度の情報を認識できた場合には、位置検出器11の車速センサ14のセンサ信号をもとに車両3の車速の情報を取得するとともに、前方認識部21や後方認識部23で認識された車両3の走行中の道路の制限速度の情報が示す制限速度と車速センサ14のセンサ信号をもとに取得した車両3の車速の情報が示す車速とを比較し、車両3の車速が車両3の走行中の道路の制限速度を超過しているか否かを判定する第1速度超過判定処理を実行する。よって、制御装置26は、請求項の車速情報取得部としても機能する。
【0057】
そして、第1速度超過判定処理において、車両3の車速が車両3の走行中の道路の制限速度を超過していると判定した場合には、制御装置26は、音声出力装置24に指示を行って音声出力装置24から速度超過を知らせる警告音声などを出力させ、速度超過の警告を行わせる。
【0058】
なお、本実施形態では、前方カメラ18で撮像された画像をもとに前方認識部21で制限速度の情報を認識できなかったときのために、後方カメラ19で撮像された画像をもとに後方認識部23でも制限速度の情報の認識を行う構成となっているが、必ずしもこれに限らない。例えば、前方カメラ18および前方認識部21を速度超過警告装置1に備えず、後方カメラ19で撮像された画像をもとに後方認識部23でのみ制限速度の情報の認識を行う構成としてもよいし、後方カメラ19および後方認識部23を速度超過警告装置1に備えず、前方カメラ18で撮像された画像をもとに前方認識部21でのみ制限速度の情報の認識を行う構成としてもよい。また、前方カメラ18を速度超過警告装置1に備えない構成とした場合には、車線数や幅員の情報は、画像認識装置20での画像認識によらずに、記憶媒体17中の地図データから取得する構成とすればよい。
【0059】
さらに、制御装置26は、画像認識装置20での画像認識で制限速度の情報を認識できなかった場合には、車両3の走行中の道路の道路条件情報を、地図データ入力器16を介して記憶媒体17中の地図データから取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報および統計数の情報を得るデータ参照処理を実行する。また、制御装置26は、データ参照処理で得られた制限速度の情報や統計数の情報をもとに車両3の走行中の道路の制限速度を推定する制限速度推定処理を実行する。よって、制御装置26は、請求項のデータ参照部および制限速度推定部としても機能する。なお、データ参照処理および制限速度推定処理の詳細については後述する。
【0060】
続いて、制御装置26は、位置検出器11の車速センサ14のセンサ信号をもとに車両3の車速の情報を取得するとともに、制限速度推定処理で推定した制限速度(以下、推定制限速度と呼ぶ)と車速センサ14のセンサ信号をもとに取得した車両3の車速の情報が示す車速とを比較し、車両3の車速が推定制限速度を超過しているか否かを判定する第2速度超過判定処理を実行する。そして、第2速度超過判定処理において、車両3の車速が推定制限速度を超過していると判定した場合には、制御装置26は、音声出力装置24に指示を行って音声出力装置24から速度超過を知らせる警告音声などを出力させ、速度超過の警告を行わせる。よって、制御装置26は、請求項の警告判定部としても機能する。
【0061】
なお、位置検出器11、地図データ入力器16、および音声出力装置24については、車載ナビゲーション装置に備えられているものを利用する構成としてもよい。
【0062】
また、速度超過警告システム100では、各車両3の速度超過警告装置1は、対応関係データ作成処理で作成して制限速度データベース27に格納している対応関係データを、所定の期間ごとにセンタ通信部25から情報センタ2に向けて送信する。さらに、情報センタ2においては、各車両3から送信されてきた各対応関係データを集計して統合した新たな対応関係データを作成して、この新たな対応関係データを各車両3の速度超過警告装置1に配信する。そして、各車両3の速度超過警告装置1は、情報センタ2から配信されてきたこの新たな対応関係データを制限速度データベース27に上書きし、以降は、この新たな対応関係データをデータ参照処理に用いるものとする。
【0063】
なお、ここで言うところの所定の期間ごととは、1日ごとや1週間ごとなどの任意の時間単位であってもよいし、車両3のIG(イグニッション)スイッチがオンになるごとや車両3のACC(アクセサリ)スイッチがオンになるごとなどの状態変化単位であってもよい。
【0064】
次に、図6を用いて、速度超過警告装置1の動作フローについての説明を行う。図6は、速度超過警告装置1の動作フローの一例を示すフローチャートである。なお、本フローは、例えば自車両のACCスイッチがオンされたときに開始される。また、図6のフローでは、説明の便宜上、情報センタ2との間でのデータの送受信に関する処理は省略している。
【0065】
まず、ステップS1では、制御装置26が車両3の現在位置の特定(つまり、現在位置特定)を行い、現在位置特定を行うことができた場合(ステップS1でYes)には、ステップS2に移る。また、現在位置特定を行うことができなかった場合(ステップS1でNo)には、ステップS1のフローを繰り返す。なお、制御装置26は、位置検出器11で算出した車両3の現在位置の情報を取得することによって車両3の現在位置特定を行うものとする。
【0066】
ステップS2では、前方カメラ18で撮像された車両3の走行中の道路の前方の画像をもとに前方認識部21が画像認識を行い、車両3の走行中の道路の前方に存在する道路標識や路面標示に示されている制限速度の情報を認識(つまり、前方標識標示認識)できた場合(ステップS2でYes)には、認識した制限速度の情報を制御装置26に送って、ステップS4に移る。また、前方標識標示認識できなかった場合(ステップS2でNo)には、ステップS3に移る。
【0067】
ステップS3では、後方カメラ19で撮像された車両3の走行中の道路の後方の画像をもとに後方認識部23が画像認識を行い、車両3の走行中の道路の後方に存在する路面標示に示されている制限速度の情報を認識(つまり、後方標示認識)できた場合(ステップS3でYes)には、認識した制限速度の情報を制御装置26に送って、ステップS4に移る。また、後方標示認識できなかった場合(ステップS3でNo)には、ステップS10に移る。
【0068】
ステップS4では、画像認識装置20で認識した制限速度の情報が示す制限速度を車両3の走行中の道路の制限速度として制御装置26が確定し、ステップS5に移る。ステップS5では、制御装置26が、特定された現在位置の道路種別、車線数、幅員の情報を、地図データ入力器16を介して記憶媒体17中の地図データから取得しようと試みる。そして、道路種別、車線数、幅員の情報(つまり、全道路条件情報)を取得できた場合(ステップS5でYes)には、ステップS7に移る。また、全道路条件情報を取得できなかった(つまり、道路種別、車線数、幅員の情報のうちの車線数および幅員の情報のいずれかでも取得できなかった)場合(ステップS5でNo)には、ステップS6に移る。
【0069】
ステップS6では、制御装置26が区画線認識部22に指示を行い、区画線認識部22での画像認識によって車両3の走行中の道路の前方に存在する区画線を認識させ、車両3の走行中の道路の車線数や幅員を算出させる。そして、区画線認識部22での区画線の認識により車両3の走行中の道路の車線数や幅員を算出(つまり、区画線認識で算出)できた場合(ステップS6でYes)には、ステップS7に移る。また、区画線認識で算出できなかった場合(ステップS6でNo)には、ステップS10に移る。
【0070】
ステップS7では、制御装置26が対応関係データ作成処理を実行し、ステップS8に移る。ステップS8では、制御装置26が第1速度超過判定処理を実行する。そして、第1速度超過判定処理において、車両3の車速が車両3の走行中の道路の制限速度を超過していると判定した場合(ステップS8でYes)には、ステップS9に移る。また、車両3の車速が車両3の走行中の道路の制限速度を超過していると判定しなかった場合(ステップS8でNo)には、ステップS13に移る。
【0071】
ステップS9では、制御装置26が音声出力装置24に指示を行って音声出力装置24で速度超過の警告を行わせ、ステップS13に移る。
【0072】
ステップS10では、データ参照処理を実行し、ステップS11に移る。データ参照処理では、前述したように、車両3の走行中の道路の道路条件情報を、地図データ入力器16を介して記憶媒体17中の地図データから取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報および統計数の情報を得る。ここで、図5の例を用いて具体例を挙げると、車両3の走行中の道路の道路条件情報が、道路種別の情報「一般道路」、車線数の情報「2」、幅員の情報「10m」の組み合わせだった場合には、制限速度の情報「50km/h」および統計数の情報「12」が得られることになる。また、車両3の走行中の道路の道路条件情報が、道路種別の情報「一般道路」、車線数の情報「2」、幅員の情報「15m」の組み合わせだった場合には、制限速度の情報「60km/h」および統計数の情報「32」と制限速度の情報「50km/h」および統計数の情報「8」との2種類の組が得られることになる。
【0073】
なお、データ参照処理において、道路条件情報のうちの車線数や幅員の情報を区画線認識部22での区画線の認識によって得る構成としてもよい。
【0074】
ステップS11では、制限速度推定処理を行ってステップS12に移る。ここで、図7のフローチャートを用いて、制限速度推定処理の概略について説明を行う。なお、図7は、制限速度推定処理の動作フローの一例を示すフローチャートである。
【0075】
まず、ステップS111では、データ参照処理によって制限速度の情報および統計数の情報の組が複数得られたか否かを制御装置26が判定する。そして、データ参照処理によって制限速度の情報および統計数の情報の組が複数得られた(つまり、推定制限速度候補が複数)と判定した場合(ステップS111でYes)には、ステップS113に移る。また、推定制限速度候補が複数と判定しなかった場合(ステップS111でNo)には、ステップS112に移る。
【0076】
ステップS112では、第1推定制限速度決定処理を行って、推定制限速度を決定し、ステップS12に移る。第1推定制限速度決定処理では、データ参照処理によって得られた1組の制限速度の情報および統計数の情報の組のうちの制限速度の情報が示す制限速度を推定制限速度として制御装置26が決定する。
【0077】
ステップS113では、制御装置26が統計数差算出処理を行って、ステップS114に移る。統計数差算出処理では、データ参照処理によって得られた複数組の制限速度の情報および統計数の情報の組のうちの統計数が1番目に多い組と統計数が2番目に多い組とを選択する。そして、統計数が1番目に多い制限速度の情報の統計数と統計数が2番目に多い制限速度の情報の統計数との差を算出する。
【0078】
ステップS114では、統計数が1番目に多い制限速度の情報の統計数と統計数が2番目に多い制限速度の情報の統計数との差が所定の閾値以上であるか否かを制御装置26が判定する。そして、差が所定の閾値以上であると判定した場合(ステップS114でYes)には、ステップS115に移る。また、差が所定の閾値以上であると判定しなかった場合(ステップS114でNo)には、ステップS116に移る。なお、ここで言うところの所定の閾値とは、統計数が1番目に多い制限速度の情報の統計数が、統計数が2番目に多い制限速度の情報の統計数の数倍に達するなど、統計数が1番目に多い制限速度の情報の信憑性が十分に高いと考えられる程度に大きな統計数の開きに該当する値であって、任意に設定可能な値である。
【0079】
ステップS115では、第2推定制限速度決定処理を行って、推定制限速度を決定し、ステップS12に移る。第2推定制限速度決定処理では、データ参照処理によって得られた複数組の制限速度の情報および統計数の情報の組のうちの統計数が1番目に多い組の制限速度の情報が示す制限速度を推定制限速度として制御装置26が決定する。
【0080】
また、ステップS116では、第3推定制限速度決定処理を行って、推定制限速度を決定し、ステップS12に移る。第3推定制限速度決定処理では、データ参照処理によって得られた複数組の制限速度の情報および統計数の情報の組の中の、統計数が1番目に多い組の制限速度の情報が示す制限速度と統計数が2番目に多い組の制限速度の情報が示す制限速度とのうち、値がより低い方の制限速度を推定制限速度として制御装置26が決定する。
【0081】
図6に戻って、ステップS12では、制御装置26が第2速度超過判定処理を実行する。そして、第2速度超過判定処理において、車両3の車速が車両3の走行中の道路の推定制限速度を超過していると判定した場合(ステップS12でYes)には、ステップS9に移る。また、車両3の車速が車両3の走行中の道路の推定制限速度を超過していると判定しなかった場合(ステップS12でNo)には、ステップS13に移る。
【0082】
ステップS13では、自車両のACCスイッチがオフになった場合(ステップS13でYes)には、フローを終了する。また、自車両のACCスイッチがオフになっていない場合(ステップS13でNo)には、ステップS1に戻ってフローを繰り返す。
【0083】
なお、本フローでは、ACCスイッチがオンされたときにフローが開始され、ACCスイッチがオフされたときにフローが終了する構成を示したが、必ずしもこれに限らない。例えば、IGスイッチがオンされたときにフローが開始され、IGスイッチがオフされたときにフローが終了する構成としてもよい。
【0084】
制限速度は、地域ごとに自由に設定されているが、車線数、歩道の有り無し、中央分離帯の有り無し等の各項目によって制限速度を定める規制速度算出要領に則って制限速度が設定されている地域も多い。また、制限速度を定める上で、規制速度算出要領の各項目の中でも車線数(ひいては幅員)の影響が特に大きい。よって、車線数や幅員と実際の制限速度との間には特に強い相関があると言える。また、制限速度は、高速道路、自動車専用道路、一般道路といった道路種別によって設定され得る範囲が大まかに決まっている。よって、道路種別と実際の制限速度との間にも特に強い相関があると言える。
【0085】
従って、以上の構成のように、前方カメラ18や後方カメラ19で撮像した画像に基づく画像認識によって認識することができた道路標識や路面標示の制限速度の情報と車両3の走行中の道路の道路条件情報(道路種別の情報と車線数の情報および幅員の情報とを組み合わせた情報)との対応付けを、統計をとりながら繰り返すことによって得られた対応関係データにおいては、実際の道路条件情報と実際の制限速度との対応がより精度良くなされる可能性が高い。よって、以上の構成によれば、車両3の走行中の道路の道路条件情報をもとに、この対応関係データを参照して、車両3の走行中の道路の制限速度をより精度良く推定することが可能になる。
【0086】
また、以上の構成によれば、車両3の走行中の道路の道路種別、車線数、および幅員の情報を取得しさえすれば、車両3の走行中の道路の制限速度をより精度良く推定することが可能になるので、制限速度の情報が含まれる地図データが利用できなかったり、道路標識や路面標示の画像認識による車両3の走行中の道路の制限速度の特定に失敗したりした場合であっても、車両3の走行中の道路の制限速度をより精度良く推定することが可能になる。従って、以上の構成によれば、より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても、走行中の道路の制限速度をより精度良く推定することが可能になる。よって、速度超過警告装置1は、請求項の運転支援装置として機能する。
【0087】
さらに、以上の構成によれば、車両3の速度が制限速度や推定制限速度を超過していると制御装置26で判定した場合に速度超過を知らせる警告を行うので、ドライバーの不注意による速度超過を防止することが可能になる。
【0088】
また、以上の構成によれば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が小さいときのような、統計数が1番目に多い制限速度の情報の信憑性がより低い場合であっても、値がより低い方の制限速度を車両3の走行中の道路の推定制限速度として決定するので、推定が誤っていた場合であっても推定制限速度を実際の制限速度よりも高く推定する可能性を低減することができる。従って、車両3の速度が実際の制限速度を超過している場合にも警告を行わない状況が生じる可能性を低減することが可能になり、ドライバーの不注意による速度超過をより防止することが可能になる。
【0089】
さらに、以上の構成によれば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときであって、統計数が1番目に多い制限速度の情報と統計数が2番目に多い制限速度の情報との間の統計数の差が大きいときのような、統計数が1番目に多い制限速度の情報の信憑性がより高い場合には、統計数が1番目に多い制限速度の情報が示す制限速度を車両3の走行中の道路の制限速度として優先して推定することが可能になるので、車両3の走行中の道路の制限速度を実際の制限速度よりも高く推定する可能性が低くなり、走行中の道路の制限速度をより精度良く推定することが可能になる。
【0090】
また、本発明が適用された速度超過警告システム100によれば、各車両3に搭載された各速度超過警告装置1でそれぞれ作成された対応関係データを情報センタ2で統合して新たな対応関係データを作成するので、1つの速度超過警告装置1のみで作成された対応関係データよりも全体の統計数が増し、実際の道路の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。そして、この新たな対応関係データを速度超過警告装置1の制限速度データベース27に対応関係データとして格納し、この新たな対応関係データを参照して車両3の走行中の道路の制限速度の推定が行われることになるので、走行中の道路の制限速度をさらに精度良く推定することが可能になる。
【0091】
なお、各車両3の現在位置の情報をもとに情報センタ2側で当該現在位置の道路の制限速度の情報を調べて各車両3に配信する構成を想定した場合には、情報センタ2側で各車両に個別の処理を行うため、情報センタ2の負荷が増大する問題が生じる。また、他にも、各車両3の進行に合わせて頻繁に各車両3それぞれの走行中の道路の制限速度の情報を個別に配信しなければならないので、情報センタ2と各車両3との間での通信が混み合ってしまい、通信網への負荷が増大する問題も生じる。
【0092】
これに対して、本発明が適用された速度超過警告システム100の構成によれば、上述の新たな対応関係データを各車両3の速度超過警告装置1に一律に送信(配信)するだけで、各速度超過警告装置1において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ2側の処理の負荷を抑えることや通信網への負荷の増大を抑えることが可能になる。よって、速度超過警告システム100は、請求項の運転支援システムとして機能する。
【0093】
なお、前述の実施形態では、対応関係データを速度超過警告装置1の制御装置26で作成する構成を示したが、必ずしもこれに限らない。例えば、画像認識装置20で認識できた制限速度の情報と地図データ入力器16を介して記憶媒体17中の地図データから取得したこの制限速度の情報が認識できた地点の道路条件情報との組(以下、組み合わせ情報と呼ぶ)を制御装置26がセンタ通信部25を介して情報センタ2に逐次送信し、逐次送信されてくるこの組み合わせ情報をもとに統計を取りながら情報センタ2で対応関係データを作成する構成としてもよい。この場合には、情報センタ2で作成した対応関係データを、センタ通信部25を介して速度超過警告装置1が取得して制限速度データベース27に格納し、この情報センタ2由来の対応関係データをデータ参照処理に用いる構成とすればよい。
【0094】
以上の構成によれば、各車両3に搭載された速度超過警告装置1でそれぞれ画像認識によって認識された制限速度の情報とその制限速度の情報を認識することができた際に走行中の道路の道路条件情報との組み合わせ情報を情報センタ2で統合して新たな対応関係データを作成するので、1つの速度超過警告装置1のみで対応関係データを作成する場合よりも全体の統計数が増し、実際の道路の道路条件情報と実際の制限速度との対応がさらに精度良くなされる可能性が高くなる。従って、以上の構成によっても、走行中の道路の制限速度をさらに精度良く推定することが可能になる。また、以上の構成によれば、上述の新たな対応関係データを各車両3の速度超過警告装置1に一律に送信(配信)するだけで、各速度超過警告装置1において走行中の道路の制限速度をさらに精度良く推定することを可能にすることができるので、情報センタ2側の処理の負荷を抑えることができる。
【0095】
また、前述の実施形態では、速度超過警告装置1が情報センタ2とセンタ通信部25を介して通信を行うことによって情報センタ2から対応関係データを受信(取得)する構成を示したが、必ずしもこれに限らない。例えば、速度超過警告装置1がセンタ通信部25を備えず、情報センタ2から対応関係データを受信(取得)しない構成としてもよい。
【0096】
さらに、前述の実施形態では、速度超過警告装置1の画像認識装置20で認識できた制限速度の情報と地図データ入力器16を介して記憶媒体17中の地図データから取得したこの制限速度の情報が認識できた地点の道路条件情報とをもとに作成された対応関係データをデータ参照処理に用いる構成を示したが、必ずしもこれに限らない。例えば、速度超過警告装置1以外の手段(例えば人手など)によって、道路条件情報とその道路条件情報において設定されていることが多い制限速度の情報との対応付けを行って作成した対応関係データベースを予め制限速度データベース27に格納しておき、この予め作成された対応関係データをデータ参照処理に用いる構成としてもよい。この場合、速度超過警告装置1において対応関係データ作成処理を行わない構成としてもよい。なお、速度超過警告装置1において対応関係データ作成処理を行わず、上述の予め作成された対応関係データをデータ参照処理に用いる構成とした場合には、制限速度データベース27は読み出し専用のROM等のメモリで構成してもよい。
【0097】
また、前述の実施形態では、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときに、第2推定制限速度決定処理や第3推定制限速度決定処理を行って推定制限速度を決定する構成を示したが、必ずしもこれに限らない。例えば、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときに、統計数が1番目に多い組の制限速度の情報が示す制限速度を常に推定制限速度として決定する構成としてもよい。また、同一の道路条件情報に対して複数種類の制限速度の情報がデータ参照処理で得られたときに、統計数が1番目に多い組の制限速度の情報が示す制限速度と統計数が2番目に多い組の制限速度の情報が示す制限速度とのうち、値がより低い方の制限速度を常に推定制限速度として決定する構成としてもよい。
【0098】
なお、前述の実施形態では、音声出力装置24によって速度超過を知らせる警告を行う構成を示したが、必ずしもこれに限らない。例えば、液晶ディスプレイ等のディスプレイに速度超過を知らせる警告表示を行うことによって警告を行う構成としてもよいし、LED等の点灯を行うことによって速度超過を知らせる警告を行う構成としてもよい。また、速度超過警告装置1に含まれない音声出力装置や表示装置などによって速度超過を知らせる警告を行う構成としてもよい。
【0099】
また、前述の実施形態では、道路条件情報が道路種別の情報、車線数の情報、および幅員の情報からなる構成を示したが、必ずしもこれに限らない。前述したように、実際の制限速度との間に特に強い相関があるのは、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とであるため、道路条件情報は、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報であればよい。さらに、道路条件情報に道路種別の情報、車線数の情報、および幅員の情報以外の情報を含む構成であってもよく、例えば、実際の制限速度との間に強い相関がある歩道の有無の情報、中央分離帯の有無の情報、交差点の数の情報などをさらに含む構成としてもよい。
【0100】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0101】
1 速度超過警告装置(運転支援装置)、2 情報センタ、3 車両、11 位置検出器、12 加速度センサ、13 ジャイロスコープ、14 車速センサ、15 GPS受信機、16 地図データ入力器、17 記憶媒体(記憶装置)、18 前方カメラ(撮像部)、19 後方カメラ(撮像部)、20 画像認識装置(画像認識部)、21 前方認識部、22 区画線認識部、23 後方認識部、24 音声出力装置(警告部)、25 センタ通信部(通信部)、26 制御装置(道路条件情報取得部、対応関係データ作成部、車速情報取得部、データ参照部、制限速度推定部、警告判定部)、27 制限速度データベース(対応関係データ格納部)、100 速度超過警告システム(運転支援システム)
【特許請求の範囲】
【請求項1】
車両に搭載される運転支援装置であって、
道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している対応関係データ格納部と、
前記車両の走行中の道路の前記道路条件情報を取得する道路条件情報取得部と、
前記道路条件情報取得部で取得した道路条件情報をもとに前記対応関係データ格納部に格納されている前記対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得るデータ参照部と、
前記データ参照部で得られた制限速度の情報をもとに当該走行中の道路の制限速度を推定する制限速度推定部と、を備えることを特徴とする運転支援装置。
【請求項2】
前記車両の速度の情報を取得する車速情報取得部と、
警告を行う警告部と、
前記制限速度推定部で推定した制限速度を前記車速情報取得部で取得した速度の情報が示す速度が超過していると判定した場合に前記警告部で警告を行わせる警告判定部と、をさらに備えることを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、
前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、
前記画像認識部で制限速度の情報を認識することができた場合に前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報を当該制限速度の情報に対応付ける処理を、統計をとりながら繰り返していくことによって、前記道路条件情報と前記制限速度の情報とに加えて統計数も対応付けられた前記対応関係データを作成し、作成したこの対応関係データを前記対応関係データ格納部に格納される対応関係データとする対応関係データ作成部と、をさらに備えることを特徴とする請求項1または2に記載の運転支援装置。
【請求項4】
前記制限速度推定部は、同一の前記道路条件情報に対して複数種類の制限速度の情報が前記データ参照部で得られた場合には、当該複数種類の制限速度の情報のうちの、前記統計数が1番目に多い制限速度の情報が示す制限速度と前記統計数が2番目に多い制限速度の情報が示す制限速度とを比較し、値が低い方の制限速度を前記車両の走行中の道路の制限速度として推定することを特徴とする請求項3に記載の運転支援装置。
【請求項5】
前記制限速度推定部は、前記統計数が1番目に多い制限速度の情報の統計数と前記統計数が2番目に多い制限速度の情報の統計数との差が所定の閾値以上であった場合には、前記統計数が1番目に多い制限速度の情報が示す制限速度を前記車両の走行中の道路の制限速度として優先して推定することを特徴とする請求項4に記載の運転支援装置。
【請求項6】
前記運転支援装置は、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限含む地図データを記憶する記憶装置から当該地図データを取得するものであって、
前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを、前記記憶装置に記憶されている地図データから取得することを特徴とする請求項1〜5のいずれか1項に記載の運転支援装置。
【請求項7】
前記運転支援装置は、道路種別の情報を少なくとも含む地図データを記憶する記憶装置から当該地図データを取得するものであって、
前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの前記道路種別の情報を、前記記憶装置に記憶されている地図データから取得するとともに、
前記車線数の情報および前記幅員の情報のうちの少なくともいずれかの情報については、前記撮像部で撮像した画像に基づく画像認識によって取得することを特徴とする請求項3〜5のいずれか1項に記載の運転支援装置。
【請求項8】
請求項1または2に記載の運転支援装置を備えた複数台の車両と、
情報センタと、を含み、
前記運転支援装置は、
前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、
前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、
前記情報センタとの間でデータの送受信を行う通信部と、をさらに備え、
前記画像認識部で制限速度の情報を認識することができた場合に、前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報と当該制限速度の情報とを組み合わせた情報である組み合わせ情報を前記通信部によって前記情報センタに送信するとともに、
前記情報センタは、
複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる前記組み合わせ情報を統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、
前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴とする運転支援システム。
【請求項9】
請求項3〜7のいずれか1項に記載の運転支援装置を備えた複数台の車両と、
情報センタと、を含み、
前記運転支援装置は、
前記情報センタとの間でデータの送受信を行う通信部をさらに備え、
前記対応関係データ作成部で作成した対応関係データを前記通信部によって前記情報センタに送信するとともに、
前記情報センタは、
複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる対応関係データを統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、
前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴とする運転支援システム。
【請求項1】
車両に搭載される運転支援装置であって、
道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している対応関係データ格納部と、
前記車両の走行中の道路の前記道路条件情報を取得する道路条件情報取得部と、
前記道路条件情報取得部で取得した道路条件情報をもとに前記対応関係データ格納部に格納されている前記対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得るデータ参照部と、
前記データ参照部で得られた制限速度の情報をもとに当該走行中の道路の制限速度を推定する制限速度推定部と、を備えることを特徴とする運転支援装置。
【請求項2】
前記車両の速度の情報を取得する車速情報取得部と、
警告を行う警告部と、
前記制限速度推定部で推定した制限速度を前記車速情報取得部で取得した速度の情報が示す速度が超過していると判定した場合に前記警告部で警告を行わせる警告判定部と、をさらに備えることを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、
前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、
前記画像認識部で制限速度の情報を認識することができた場合に前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報を当該制限速度の情報に対応付ける処理を、統計をとりながら繰り返していくことによって、前記道路条件情報と前記制限速度の情報とに加えて統計数も対応付けられた前記対応関係データを作成し、作成したこの対応関係データを前記対応関係データ格納部に格納される対応関係データとする対応関係データ作成部と、をさらに備えることを特徴とする請求項1または2に記載の運転支援装置。
【請求項4】
前記制限速度推定部は、同一の前記道路条件情報に対して複数種類の制限速度の情報が前記データ参照部で得られた場合には、当該複数種類の制限速度の情報のうちの、前記統計数が1番目に多い制限速度の情報が示す制限速度と前記統計数が2番目に多い制限速度の情報が示す制限速度とを比較し、値が低い方の制限速度を前記車両の走行中の道路の制限速度として推定することを特徴とする請求項3に記載の運転支援装置。
【請求項5】
前記制限速度推定部は、前記統計数が1番目に多い制限速度の情報の統計数と前記統計数が2番目に多い制限速度の情報の統計数との差が所定の閾値以上であった場合には、前記統計数が1番目に多い制限速度の情報が示す制限速度を前記車両の走行中の道路の制限速度として優先して推定することを特徴とする請求項4に記載の運転支援装置。
【請求項6】
前記運転支援装置は、道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限含む地図データを記憶する記憶装置から当該地図データを取得するものであって、
前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを、前記記憶装置に記憶されている地図データから取得することを特徴とする請求項1〜5のいずれか1項に記載の運転支援装置。
【請求項7】
前記運転支援装置は、道路種別の情報を少なくとも含む地図データを記憶する記憶装置から当該地図データを取得するものであって、
前記道路条件情報取得部は、最低限でも前記道路条件情報のうちの前記道路種別の情報を、前記記憶装置に記憶されている地図データから取得するとともに、
前記車線数の情報および前記幅員の情報のうちの少なくともいずれかの情報については、前記撮像部で撮像した画像に基づく画像認識によって取得することを特徴とする請求項3〜5のいずれか1項に記載の運転支援装置。
【請求項8】
請求項1または2に記載の運転支援装置を備えた複数台の車両と、
情報センタと、を含み、
前記運転支援装置は、
前記車両の前方および後方のうちの少なくともいずれかの画像を撮像する撮像部と、
前記撮像部で撮像した画像に基づく画像認識によって、道路標識に示されている制限速度の情報および路面標示に示されている制限速度の情報のうちの少なくともいずれかの制限速度の情報を認識する画像認識部と、
前記情報センタとの間でデータの送受信を行う通信部と、をさらに備え、
前記画像認識部で制限速度の情報を認識することができた場合に、前記道路条件情報取得部で取得した前記車両の走行中の道路の前記道路条件情報と当該制限速度の情報とを組み合わせた情報である組み合わせ情報を前記通信部によって前記情報センタに送信するとともに、
前記情報センタは、
複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる前記組み合わせ情報を統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、
前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴とする運転支援システム。
【請求項9】
請求項3〜7のいずれか1項に記載の運転支援装置を備えた複数台の車両と、
情報センタと、を含み、
前記運転支援装置は、
前記情報センタとの間でデータの送受信を行う通信部をさらに備え、
前記対応関係データ作成部で作成した対応関係データを前記通信部によって前記情報センタに送信するとともに、
前記情報センタは、
複数台の車両に搭載された各前記運転支援装置の前記通信部からそれぞれ送信されてくる対応関係データを統合して新たな対応関係データを作成して、作成した当該新たな対応関係データを前記運転支援装置に送信し、
前記情報センタで作成した当該新たな対応関係データを前記運転支援装置の前記対応関係データ格納部に前記対応関係データとして格納することを特徴とする運転支援システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−282508(P2010−282508A)
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願番号】特願2009−136633(P2009−136633)
【出願日】平成21年6月5日(2009.6.5)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願日】平成21年6月5日(2009.6.5)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]