
運転支援装置及びプログラム

【課題】交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、交差点に進入する前に走行した進入車線を特定し、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する。また、交差点を退出後に走行した退出道路を特定し、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。
【解決手段】運転支援装置は、交差点に進入する前に走行した進入車線を特定し、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する。また、交差点を退出後に走行した退出道路を特定し、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転を評価し、運転者の運転を支援する運転支援装置及びプログラムに関する。
【背景技術】
【0002】
従来、走行時に運転者が行った運転が適切であったかどうかを評価するシステムが知られている。例えば、特許文献1に記載の技術では、走行中の車速、ブレーキタイミング、車間距離などが適切であるかどうか、また、交差点における一旦停止があったかどうかを評価し、順位化及び得点化を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−186045号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、交差点に接続する道路において、車線に応じて交差点通過後に走行すべき道路が規定されている場合がある。一例として、右折専用レーンが挙げられる。右折専用レーンを走行している車両は、交差点にて右折しなければならないが、交差点を直進する車両が右折専用レーンを走行して直進する場合があり、この運転動作は危険である。しかしながら、特許文献1においては、交差点通過後に走行した道路に応じた車線を、交差点進入前に走行したかについての評価は行われていなかった。
本発明は、上述した問題点を解決するためになされたものであり、その目的は、交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載の運転支援装置は、交差点に進入する前に走行した進入車線を特定する進入車線特定手段と、交差点を退出した後に走行した退出道路を特定する退出道路特定手段と、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段と、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作であると判定する判定手段と、を備えることを特徴とする。
これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。したがって、適切な運転評価を運転者にフィードバックすることにより、運転者の技量向上の一助とすることができる。
【0006】
請求項2に記載の運転支援装置は、進入車線に対応づけられる進行すべき方向が案内されたか否かを判断する案内判断手段を備える。判定手段は、案内判断手段による判断結果に基づき、進入動作の危険度合いを判定する。
これにより、例えば、進行すべき方向が案内されていたにも関わらず退出道路と走行予定道路とが一致しない場合には、案内されていない場合と比べて悪質であるため、危険度合いが高いと判定することができ、進入動作の危険度合いを適切に判定することができる。
【0007】
請求項3に記載の運転支援装置は、交差点を退出した後に走行した退出車線を特定する退出車線特定手段と、進入車線に対応づけられる交差点退出後に走行すべき走行予定車線を特定する走行予定車線特定手段と、を備える。判定手段は、退出道路と走行予定道路とが一致する場合であって、退出車線と走行予定車線とが一致しない場合、交差点を通過する通過動作を危険動作であると判定する。
これにより、退出道路と走行予定道路とが一致していた場合であっても、退出車線と走行予定車線とが一致していなければ、交差点を通過する通過動作を危険動作と判定するので、交差点の通過に伴う運転動作をより適切に評価することできる。
【0008】
以上は、運転支援装置の発明として説明してきたが、次に示すようなプログラムの発明として実現することができる。
交差点に進入する前に走行した進入車線を特定する進入車線特定手段、交差点を退出した後に走行した退出道路を特定する退出道路特定手段、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作であると判定する判定手段、としてコンピュータを機能させるプログラムである。このようなプログラムを実行することで、上記と同様の効果が奏される。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態の運転支援装置の構成を示すブロック図である。
【図2】本発明の一実施形態の交差点通過情報取得処理を示すフローチャートである。
【図3】本発明の一実施形態の運転評価処理を示すフローチャートである。
【図4】本発明の一実施形態の走行すべき車線に関する情報を説明する説明図である。
【図5】本発明の一実施形態の走行すべき車線に関する情報を説明する説明図である。
【図6】本発明の一実施形態の走行すべき車線に関する情報を説明する説明図である。
【図7】本発明の一実施形態の過去運転情報テーブルを説明する説明図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態による運転支援装置を図面に基づいて説明する。
図1は、本実施形態による運転支援装置1の全体構成を示すブロック図である。運転支援装置1は、車両に搭載されているものであり、ナビゲーション装置2、車両ECU80、カメラ86等で構成されている。
【0011】
ナビゲーション装置2は、制御部10を中心に構成されており、制御部10に接続される位置検出器20、地図データ記憶部30、操作スイッチ群40、描画部50、音声出力部60、及び情報記憶部70等を備えている。
制御部10は、通常のコンピュータとして構成されており、内部にはCPU、ROM、I/O、及び、これらの構成を接続するバスラインなどが備えられている。
【0012】
位置検出器20は、車両の現在位置に関する位置情報を検出するものであって、いずれも周知の地磁気センサ21、ジャイロスコープ22、距離センサ23、および、衛星からの電波を受信するGPS(Global Positioning System)受信機24等を有している。これらの21〜24は、各々が性質の異なる誤差を持っているため、相互に補完しながら使用される。なお位置情報は、座標情報として検出される。
【0013】
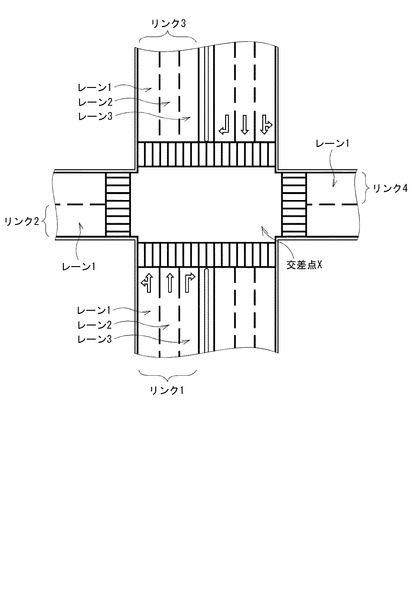
地図データ記憶部30は、例えばハードディスク装置(HDD)として実現される記憶装置である。なお、本実施形態ではHDDを用いたが、メモリカード等の他の媒体を用いても差し支えない。地図データ記憶部30は、車両の位置検出の精度向上のため、また、経路を探索するためや探索された経路を案内するための地図データを記憶している。地図データに含まれる道路情報においては、交差点、合流点などの分岐点はノードとして、また、道路はノードとノードとを結ぶリンクとして定義されている。各リンクは、各リンクを特定するリンクIDに関連づけて進行方位、距離、車線数と車線の位置、車線を区切る路面上の線種パターン、道路種別等が属性情報として定義されている。なお、線種パターンとは、例えば図4のリンク1のように3つの車線が区画され、各車線を区画する区画線の形状が左から実線、破線、破線、実線であるとすると、リンク1の線種パターンを示す情報として「実線、破線、破線、実線」が記憶されている。また、各区画線の色が、形状とともに記憶されている。また、地図データに含まれる道路情報には、交差点(ノード)に接続する道路のそれぞれの車線に対し、交差点通過後に走行すべき道路である予定走行道路、及び交差点通過後に走行すべき車線である予定走行車線が対応づけられた車線情報が含まれている。また、ノードが交差点である場合、交差点の領域を示す情報がノードの位置座標と対応づけて、道路情報として記憶されている。
【0014】
操作スイッチ群40は、ディスプレイ51と一体になったタッチスイッチもしくはメカニカルなスイッチやリモコン装置等で構成され、各種入力に使用される。
描画部50には、ディスプレイ51が接続されている。ディスプレイ51は、液晶やCRTを用いたカラーディスプレイである。このディスプレイ51を介して情報表示が行われる。
音声出力部60にはスピーカ61が接続されており、このスピーカ61を介して音声による案内が行われる。
【0015】
情報記憶部70は、位置検出器20、車両ECU80、及びカメラ86等から取得された情報を記憶するためのものであり、地図データ記憶部30と同様のHDDで構成されている。もちろん、メモリカード等の他の媒体を用いてもよい。また、地図データ記憶部30と同一のHDDであってもよい。情報記憶部70には、交差点進入前に走行した進入道路及び進入車線、交差点退出後に走行した退出道路及び退出車線が記憶される。また、交差点進入時の信号の現示情報、及び交差点通過動作中の車速等が記憶される。また、情報記憶部70には、過去の危険動作に関する過去運転情報がデータベースとして交差点毎に記憶されている。
【0016】
車両ECU80は、エンジン、変速機、アクセル、ブレーキ等の作動を制御するものであり、制御部10と同様、通常のコンピュータとして構成されており、内部にはCPU、ROM、I/O、および、これらの構成を接続するバスラインなどが備えられている。車両ECU80には、アクセルペダルの踏み込み量を検出するアクセルセンサ81、ブレーキペダルの踏み込み量を検出するブレーキセンサ82、ステアリングの回転角を検出するステアリングセンサ83、車両の速度を検出する車速センサ84、ウィンカースイッチ85等が接続されている。
カメラ86は、例えばCCD等の固体撮像素子を用いたものであり、車両外部の全方位を撮像可能に構成されている。取得された映像情報は、情報記憶部70に記憶される。
【0017】
ところで、本実施形態においては、交差点の通過に伴う運転動作を適切に評価する点に特徴を有している。そこで、図2及び図3に示すフローチャートに基づいて運転評価処理について説明する。
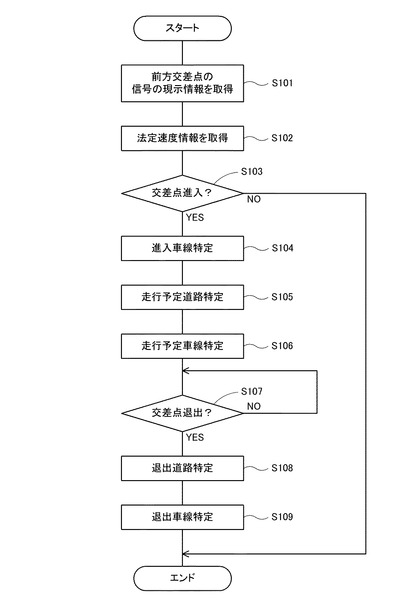
図2に示す交差点通過情報取得処理は、車両走行中の所定の間隔、例えば100msec毎、に行われる処理である。最初のステップS101(以下、「ステップ」を省略し、単に記号「S」で示す)では、前方交差点の信号の現示情報を取得する。現示情報は、カメラ86によって取得された映像情報の画像を画像解析することにより取得する。
【0018】
S102では、車両が走行している道路の法定速度情報を取得する。法定速度情報は、カメラ86によって取得された路面上のペイント又は路側の標識の映像情報の画像を画像解析することにより取得する。
なお、S101及びS102で取得される現示情報及び法定速度情報は、図示しない情報センタや路側機から通信にて取得するように構成してもよい。また法定速度は、地図データ記憶部30に予め記憶されたデータから取得するように構成してもよい。
【0019】
S103では、車両の位置情報及び道路情報に含まれる交差点の領域を示す情報に基づき、交差点に進入したか否かを判断する。交差点に進入していない場合(S103:NO)、S104以降の処理を行わない。交差点に進入した場合(S103:YES)、S104へ移行する。
S104では、交差点に進入する前に走行していた進入道路及び進入車線を特定し、当該進入車線の車線情報を含む道路情報を地図データ記憶部30から取得する。進入道路は、車両の位置情報と地図データとに基づいてマップマッチング処理を行うことにより、進入した交差点に繋がるリンクが進入道路として特定される。なお、特定された進入道路を進行した進行方位が併せて特定される。また、進入車線は、特定された進入道路の線種パターンと、カメラ86によって取得された映像情報の画像を画像解析することにより取得される区画線の線種パターンと、に基づいて特定される。例えば、車両が図4に示すリンク1を走行している場合、車両を基準としてすぐ左側の区画線が実線であり、すぐ右側の区画線が破線である場合、当該車両は左側の車線を走行していると特定される。同様の例において、車両を基準として両側の区画線がともに破線である場合、当該車両は真ん中の車線を走行していると特定される。また同様の例において、車両を基準としてすぐ左側の区画線が破線であり、すぐ右側の区画線が実線である場合、当該車両は右車線を走行していると特定される。なお、片側4車線以上の道路においては、車両のすぐとなりの区画線に加えて他の区画線の情報も用いることにより特定することができる。
【0020】
S105では、S104で取得した道路情報に基づき、交差点退出後に走行すべき走行予定道路を特定する。具体的には、進入車線が右折専用レーンであれば、交差点を右折した先の道路が走行予定道路として特定される、といった具合である。詳細については後述する。
S106では、S104で取得した道路情報に基づき、交差点退出後に走行すべき走行予定車線を特定する。具体的には、交差点を直進する場合、進入車線が左車線であれば、左車線が走行予定車線として特定される、といった具合である。詳細については後述する。
【0021】
S107では、車両の位置情報及び道路情報に含まれる交差点の領域を示す情報に基づき、交差点から退出したか否かを判断する。交差点から退出していない場合(S107:NO)、この判断処理を繰り返す。交差点から退出した場合(S107:YES)、S108へ移行する。
【0022】
S108では、車両の位置情報と道路情報とに基づき、S104にて進入道路を特定した方法と同様の方法にて交差点退出後に走行した退出道路を特定する。
S109では、車両の位置情報と道路情報とに基づき、S104にて進入車線を特定した方法と同様の方法にて交差点退出後に走行した退出車線を特定する。また、交差点通過フラグをセットし、交差点を示すノードに対応付けて、信号の現示情報、法定速度情報、交差点に進入したときの車速、進入道路、進入車線、走行予定道路、走行予定車線、退出道路及び退出車線を記憶部70に記憶し、交差点通過情報取得処理を終了する。
【0023】
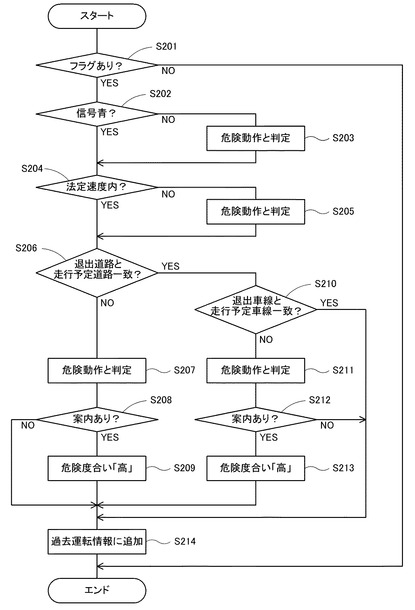
図3に示す運転評価処理は、車両走行中の所定の間隔、例えば100msec毎、に行われる処理であり、車両の動作が危険動作であると判定された場合には、運転の評価を示す運転評価点を減点する態様で、運転の評価を行うように構成されている。
S201では、S109にてセットされる交差点通過フラグがセットされているか否かを判断する。交差点通過フラグがセットされていない場合(S201:NO)、S202以降の処理を行わない。交差点通過フラグがセットされている場合(S201:YES)、S202へ移行する。
【0024】
S202では、S101にて取得した信号の現示情報に基づき、交差点に進入したときの信号の現示が青であったか否かを判断する。なお、矢印信号がある場合には、その矢印の方向に走行した場合は現示が青であったとみなし、その他の方向に走行した場合は現示が青ではなかったとみなす。例えば、交差点に進入したときの信号の現示が赤+右矢印であったとすると、当該交差点を右折した場合は現示が青であったとみなし、左折及び直進した場合は、現示が青ではなかったとみなす。本実施形態では、進入道路と退出道路との交点であるノードから進入道路を進行方向に延長した仮想直線と退出道路とのなす角が、仮想直線に対し時計回りに15度以上105度未満であった場合、車両は右折した、と判断する。また、進入道路と退出道路との交点であるノードから進入道路を進行方向に延長した仮想直線と退出道路とのなす角が、仮想直線に対し反時計回りに15度以上105度未満であった場合、車両は左折した、と判断する。また、進入道路と退出道路との交点であるノードから進入道路を進行方向に延長した仮想直線と退出道路とのなす角が、仮想直線に対し時計回りに15度以下、又は反時計回りに15度以下であった場合、車両は直進した、と判断する。信号の現示が青であった場合(S202:YES)、S204へ移行する。信号の現示が青でなかった場合(S202:NO)、S203へ移行する。
【0025】
S203では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された運転評価点の基礎点から減点する。なお、本実施形態における通過動作とは、交差点に進入するところから退出するところまでの一連の動作をいうものであって、交差点に進入する進入動作、及び交差点から退出する退出動作を含むものとする。
【0026】
S204では、交差点通過動作中の車速とS102にて取得した法定速度情報とに基づき、交差点通過動作中の車速が法定速度内であったか否かを判断する。法定速度内であった場合(S204:YES)、S206へ移行する。法定速度内でなかった場合(S204:NO)、S205へ移行する。
S205では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された基礎点から減点する。
【0027】
S206では、S108で特定された退出道路と、S105で特定された走行予定道路とが一致するか否かを判断する。退出道路と走行予定道路とが一致する場合(S206:YES)、S210へ移行する。退出道路と走行予定道路とが一致しない場合(S206:NO)、S207へ移行する。
S207では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された基礎点から減点する。なお、詳細にいえば、交差点に進入する進入動作が危険動作であると判定する、ということである。
【0028】
S208では、進入車線に関する案内が交差点通過前にあったか否かを判断する。本実施形態における進入車線に関する案内とは、ディスプレイ51上に、進入車線ごとに対応する走行予定道路等が矢印によって表示されるものである。また、進入車線に関する案内は、「現在進行中のレーンは、右折専用レーンです」といったスピーカ61を介した音声案内であってもよい。このような案内は、本処理とは別途に行われる処理に基づいて行われるものであって、例えば、目的地への経路案内が行われている場合、経路と共に案内される。進入車線に関する案内がなかった場合(S208:NO)、S214へ移行する。進入車線に関する案内があった場合(S208:YES)、S209へ移行する。
【0029】
S209では、進入車線に関する案内があったにも関わらず、退出道路と走行予定道路が一致しなかったため、案内がなかった場合と比べて悪質であり、S207にて危険動作と判定された交差点を通過する通過動作の危険度合いが高いと判定し、さらに評価を下げる。具体的には、予め設定された基礎点からさらに減点する。
【0030】
退出道路と走行予定道路とが一致する場合(S206:YES)に移行するS210では、S109で特定された退出車線とS106で特定された走行予定車線とが一致するか否かを判断する。退出車線と走行予定車線とが一致する場合(S210:YES)、S214へ移行する。退出車線と走行予定車線とが一致しない場合(S210:NO)、S211へ移行する。
S211では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された基礎点から減点する。
【0031】
S212では、進入車線及び走行予定車線に関する案内が交差点通過前にあったか否かを判断する。本実施形態における進入車線及び走行予定車線に関する案内とは、例えば、進入車線から走行予定車線にかけて交差点を跨ぐようにして描かれる矢印として、ディスプレイ51上に表示されるものである。このような案内は、本処理とは別途に行われる処理に基づいて行われるものであって、例えば、目的地への経路案内が行われている場合、経路と共に案内される。進入車線及び走行予定車線に関する案内がなかった場合(S212:NO)、S214へ移行する。進入車線及び走行予定車線に関する案内があった場合(S212:YES)、S213へ移行する。
【0032】
S213では、進入車線及び走行予定車線に関する案内があったにも関わらず、退出車線と走行予定車線とが一致しなかったため、案内がなかった場合と比べて悪質であり、S211にて危険動作と判定された交差点を通過する通過動作の危険度合いが高いと判定し、さらに評価を下げる。具体的には、予め設定された基礎点からさらに減点する。
【0033】
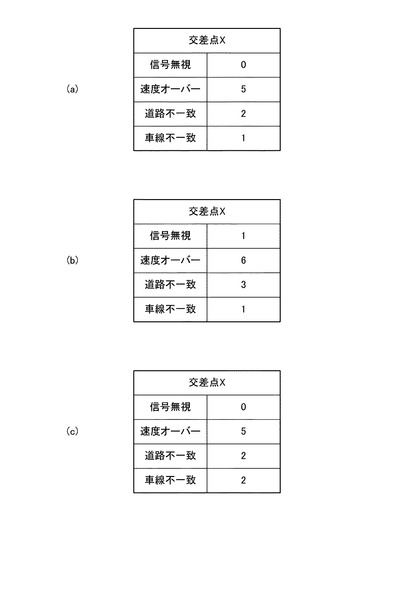
S214では、交差点を通過する通過動作に関する情報を過去運転情報に追加する。具体的には、図7に示すような過去運転情報テーブルが交差点毎に記憶されており、本処理にて危険動作と判定された項目の数値をインクリメントする。すなわち、交差点に進入したときの信号現示が青ではなく(S202:NO)、危険動作と判定された場合(S203)、「信号無視」に対応する値をインクリメントする。交差点通過動作中の車速が法定速度内ではなく(S204:NO)、危険動作と判定された場合(S205)、「速度オーバー」に対応する値をインクリメントする。退出道路と走行予定道路とが一致せず(S206:NO)、危険動作と判定された場合(S207)、「道路不一致」に対応する値をインクリメントする。退出車線と走行予定車線とが一致せず(S210:NO)、危険動作と判定された場合(S211)、「車線不一致」に対応する項目をインクリメントする。なお、交差点を通過する通過動作がいずれのステップにおいても危険動作と判定されなかった場合(S202:YES、S204:YES、S206:YES、S210:YES)には、過去運転情報テーブルの変更は行わない。そして、交差点通過フラグをリセットし、本処理を終了する。
そして、運転終了時における別の処理として、運転評価点が基準点を下回った場合には、ディスプレイ51やスピーカ61を介して運転評価点が基準点を下回った旨の警告情報を通知する。
【0034】
ここで、走行予定道路及び走行予定車線と進入車線との関係の具体例を図4、及び図5に基づいて説明する。
図4に示すように、交差点Xは、片側3車線の道路と片側1車線の道路が交わる交差点である。ここでは、リンク1から交差点Xに進入する場合を例に説明する。この場合、リンク1が「進入道路」に対応している。
【0035】
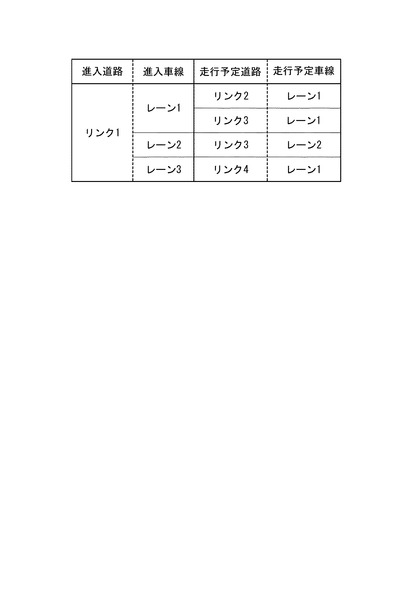
リンク1のレーン1から交差点Xに進入した場合、交差点X退出後に走行すべき走行予定道路は、リンク2又はリンク3である。また、交差点X退出後に走行すべき走行予定車線はリンク2のレーン1又はリンク3のレーン1である。この場合、リンク1のレーン1が「進入車線」に対応している。
リンク1のレーン2から交差点Xに進入した場合、交差点X退出後に走行すべき走行予定道路は、リンク3である。また、交差点X退出後に走行すべき走行予定車線は、リンク3のレーン2である。この場合、リンク1のレーン2が「進入車線」に対応している。
リンク1のレーン3から交差点Xに進入した場合、交差点X退出後に走行すべき走行予定道路は、リンク4である。また、交差点X退出後に走行すべき走行予定車線は、リンク4のレーン1である。この場合、リンク1のレーン3が「進入車線」に対応している。
以上をまとめると、図5に示すテーブルのごとくであり、このようなデータが車線情報として地図データ記憶部30に記憶されている。
【0036】
続いて、図4及び図5を用いて説明した交差点Xを通過する通過動作を評価する運転評価処理の具体例を図6に基づいて説明する。
まず、車両Pが走行軌跡Rに示すように走行して交差点Xを通過したものとする。なお、交差点Xに進入するときの信号の現示は赤+右矢印であり、交差点通過動作中の車速は法定速度内であったものとする。
車両Pが交差点Xに進入したとき(S103:YES)、交差点Xに進入する前に走行していた進入道路および進入車線を特定する(S104)。進入道路はリンク1であり、進入車線はリンク1のレーン3であるので、これに基づき、走行予定道路をリンク4と特定し、走行予定車線をリンク4のリンク1と特定する(S105、S106)。そして車両Pが交差点Xから退出したとき(S107:YES)、交差点退出後に走行した退出道路をリンク4、退出車線をリンク4のレーン1と特定する(S108、S109)。
【0037】
走行軌跡Rで走行した車両Pが交差点Xを通過する通過動作を評価すると、車両Pが交差点Xに進入したときの信号の現示は赤+右矢印であり、車両Pは交差点Xを右折したので、信号の現示は青であったとみなす(S202:YES)。車両Pは交差点Xを法定速度内で走行している(S204:YES)。また、退出道路がリンク4であり、走行予定道路がリンク4であるので、退出道路と走行予定道路とは一致している(S206:YES)。また、退出車線がリンク4のレーン1であり、走行予定車線がリンク4のレーン1であるので、退出車線と走行予定車線とは一致している(S210:YES)。したがって、車両Pが走行軌跡Rで交差点Xを通過した通過動作は、いずれのステップにおいても危険動作と判定されなかったので、過去運転情報テーブルの変更は行わず、運転評価処理を終了する。
【0038】
次に、車両Pが走行軌跡Sに示すように走行して交差点Xを通過したものとする。なお、交差点Xに進入するときの信号の現示は赤+右矢印であり、交差点通過動作中の車速は法定速度内ではなかったものとする。また、交差点Xに進入する前には、ディスプレイ51には、進入車線ごとに対応する走行予定道路が矢印によって表示され、スピーカ61より「現在進行中のレーンは、右折専用レーンです」という音声案内が行われていたものとする。
【0039】
車両Pが交差点Xに進入したとき(S103:YES)、交差点Xに進入する前に走行していた進入道路および進入車線を特定する(S104)。進入道路はリンク1であり、進入車線はリンク1のレーン3であるので、これに基づき、走行予定道路をリンク4と特定し、走行予定車線をリンク4のレーン1と特定する(S105、S106)。そして、車両Pが交差点Xから退出したとき(S107:YES)、交差点退出後に走行した退出道路をリンク3、退出車線をリンク3のレーン3と特定する(S108、S109)。
【0040】
走行軌跡Sで走行した車両Pが交差点Xを通過する通過動作を評価すると、車両Pが交差点Xに進入したときの信号の現示は赤+右矢印であり、車両Pは交差点Xを直進したので、信号の現示は青でなかったとみなし(S202:NO)、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S203)。車両Pは交差点Xを法定速度内で通過していないので(S204:NO)、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S205)。また、退出道路がリンク3であり、走行予定道路がリンク4であるので、退出道路と走行予定道路とが一致していない(S206:NO)。したがって、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S207)。さらに、進入車線に関する案内が行われていたので(S208:YES)、S207にて危険動作と判定された交差点を通過する通過動作の危険度合いが高いと判定し、さらに評価を下げる(S209)。そして、交差点Xを通過する通過動作に関する情報を過去運転情報に追加する(S214)。この例においては、図7(a)に示す過去運転情報テーブルの「信号無視」、「速度オーバー」、「道路不一致」の各項目の数値をインクリメントする。したがって、走行軌跡Sにて交差点Xを通過した後の過去運転情報テーブルは、図7(b)に示すごとくとなる。
【0041】
また別の例として、車両Pが走行軌跡Tに示すように走行して交差点Xを通過したものとする。なお、交差点Xに進入するときの信号の現示は青であり、交差点通過動作中の車速は法定速度内であったものとする。また、交差点Xに進入する前には、進入車線及び走行予定車線に関する案内は行われなかったものとする。
【0042】
車両Pが交差点Xに進入したとき(S103:YES)、交差点に進入する前に走行していた進入道路および進入車線を特定する(S104)。進入道路はリンク1であり、進入車線はリンク1のレーン2であるので、これに基づき、走行予定道路をリンク3と特定し、走行予定車線をリンク3のレーン2と特定する(S105、S106)。そして、車両Pが交差点Xから退出したとき(S107:YES)、交差点退出後に走行した退出道路をリンク3、退出車線をリンク3のレーン1と特定する(S108、S109)。
【0043】
走行軌跡Tで走行した車両Pの交差点Xを通過する通過動作を評価すると、車両Pが交差点Xに進入したときの信号の現示は青であり(S202:YES)、車両Pは交差点Xを法定速度内で走行している(S204:YES)。また、退出道路がリンク3であり、走行予定道路がリンク3であるので、退出道路と走行予定道路とが一致している(S206:YES)。一方、退出車線がリンク3のレーン1であり、走行予定車線がリンク3のレーン2であり、退出車線と走行予定車線とが一致していない(S210:NO)。したがって、車両Pは、交差点X内にて車線変更を行っており、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S211)。なお、進入車線及び走行予定車線に関する案内は行われていない(212:NO)。そして、交差点Xを通過する通過動作に関する情報を過去運転情報に追加する(S214)。この例においては、図7(a)に示す過去運転情報テーブルの「車線不一致」の項目の数値をインクリメントする。したがって、走行軌跡Tにて交差点Xを通過した後の過去運転情報テーブルは、図7(c)に示すごとくとなる。
【0044】
以上詳述したように、運転支援装置1は、交差点に進入する前に走行した進入車線を特定し(S104)、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する(S105)。また、交差点を退出後に走行した退出道路を特定し(S108)、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。したがって、適切な運転評価を運転者にフィードバックすることにより、運転者の技量向上の一助とすることができる。
【0045】
また、運転支援装置1は、退出道路と走行予定道路とが一致しない場合(S206:YES)、進入車線に対応づけられる進行すべき方向が案内されていたか否かに基づき(S208)、進入動作の危険度合いを判定する。本実施形態では、退出道路と走行予定道路とが一致せず(S206:YES)、進入車線に対応づけられる進行すべき方向が案内されていた場合(S208:YES)、危険度合いが高いと判定する(S209)。これにより、進行すべき方向が案内されていたにも関わらず退出道路と走行予定道路とが一致しない場合には、案内されていない場合と比べて悪質であるため、危険度合いが高いと判定することができ、進入動作の危険度合いを適切に判定することができる。
【0046】
さらにまた、運転支援装置1は、進入車線に対応づけられる交差点退出後に走行すべき走行予定車線を特定する(S106)。また、交差点退出後に走行した退出車線を特定し(S109)、退出道路と走行予定道路とが一致する場合であって(S206:YES)、退出車線と走行予定車線とが一致しない場合(S210:NO)、交差点を通過する通過動作を危険動作であると判定する(S211)。これにより、退出道路と走行予定道路とが一致していた場合であっても、退出車線と走行予定車線とが一致していなければ、交差点を通過する通過動作を危険動作と判定するので、交差点の通過に伴う運転動作をより適切に評価することができる。
【0047】
なお、本実施形態における制御部10が、「進入車線特定手段」、「退出道路特定手段」、「走行予定道路特定手段」、「判定手段」、「案内判断手段」、「退出車線特定手段」、及び「走行予定車線特定手段」を構成する。また、S104が「進入車線特定手段」の機能としての処理に相当し、S108が「退出道路特定手段」の機能としての処理に相当し、S105が「走行予定道路特定手段」の機能としての処理に相当し、S203、S205、S207、S209、S211、及びS213が「判定手段」の機能としての処理に相当する。また、S208、S212が「案内判定手段」の機能としての処理に相当し、S109が「退出車線特定手段」の機能としての処理に相当し、S106が「走行予定車線特定手段」の機能としての処理に相当する。
以上、本発明は上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない難易において種々の形態で実施可能である。
【0048】
(ア)判定手段
走行予定道路と退出道路とが一致しない場合であっても、走行予定道路が走行できない場合には、危険動作と判定しないように構成してもよい。すなわち、S206にて否定判断された後に、走行予定道路の走行が可能か否かを判断する判断処理を設け、走行予定道路を走行可能である場合はS207へ移行して危険動作と判定し、走行可能でない場合は、S207〜S213の処理を行わず、S214へ移行する。
【0049】
同様に、走行予定車線と退出車線が一致しない場合であっても、走行予定道路が走行できない場合には、危険動作と判定しないように構成してもよい。すなわち、S210にて否定判断された後に、走行予定車線の走行が可能か否かを判断する判断処理を設け、走行予定車線を走行可能である場合はS211へ移行して危険動作と判定し、走行可能でない場合、S211〜S213の処理を行わず、S214へ移行する。
走行予定道路や走行予定車線が走行できない場合とは、通行止めである場合や障害物がある場合などが例示される。このような情報は、カメラ86によって取得してもよいし、図示しない情報センタ等から通信にて取得してもよい。
【0050】
また、特定の危険動作について常習性があると判断された場合、危険度合いが高いと判定するように構成してもよい。常習性の有無の判断は、過去運転情報を参照し、運転動作に対応する値が所定値(例えば5回)以上である場合、常習性がある、と判断することができる。常習性がある、と判断された場合、上記実施形態のS203、S205、S207及びS211で危険動作と判定された運転動作に対し、さらに減点(例えば10点)するように構成してもよい。
【0051】
(イ)判定結果の利用方法
上記実施形態では、危険動作と判定された場合、予め設定された基礎点から減点して運転評価点を算出した。上記実施形態では、減点幅については特に言及していないが、危険動作と判定された要因ごとに同じ点数としてもよいし、要因毎に点数を変えてもよい。要因毎に点数を変える場合の例としては、信号無視(S203)、速度オーバー(S205)、道路不一致(S207)、車線不一致(S209)が、この順で危険度が高いとすると、信号無視(S203)では40点、速度オーバー(S205)では30点、道路不一致(S207)では20点、車線不一致(S203)では10点減点する、といった具合である。また、案内があったにも関わらず道路不一致、或いは車線不一致だった場合(S208:YES、またはS212:YES)には、さらに5点減点とすることができる。
また、減点方式ではなく、危険動作と判定された場合に加点する加点方式にて運転評価点を算出し、運転評価を行ってもよい。この場合、点数が高いほど悪い評価であり、例えば運転終了時に評価点が基準点を上回った場合に警告を行うように構成してもよい。
【0052】
また、運転評価結果は、運転終了時に運転評価点が基準点を下回った場合に警告を行うように構成していた。その他に、危険動作を行った場合にリアルタイムに警告を行ってもよい。また、危険動作と判定された運転動作がなされた地点の位置座標を記憶しておき、当該地点を再度通行する際に、危険動作を行った地点である旨の情報を運転者に通知し、注意喚起するように構成してもよい。また、運転評価結果を、情報センタに送信し、他の運転者の走行情報を参照してランキングを行ってもよい。
【0053】
(ウ)運転支援装置
上記実施形態では、ナビゲーション装置が運転支援装置を構成していたが、車両の走行情報を情報センタに送信し、情報センタにて上述の処理を行うようにしてもよい。すなわち、情報センタが運転支援装置を構成してもよい。
【符号の説明】
【0054】
1:運転支援装置、2:ナビゲーション装置、10:制御部(進入車線特定手段、退出道路特定手段、走行予定道路特定手段、判定手段、案内判断手段、退出車線特定手段、走行予定車線特定手段)、20:位置検出器、21:地磁気センサ、22:ジャイロスコープ、23:距離センサ、24:GPS受信機、30:地図データ記憶部、40:操作スイッチ群、50:描画部、51:ディスプレイ、60:音声出力部、61:スピーカ、70:情報記憶部、80:車両ECU、81:アクセルセンサ、82:ブレーキセンサ、83:ステアリングセンサ、84:車速センサ、85:ウィンカースイッチ、86:カメラ
【技術分野】
【0001】
本発明は、運転を評価し、運転者の運転を支援する運転支援装置及びプログラムに関する。
【背景技術】
【0002】
従来、走行時に運転者が行った運転が適切であったかどうかを評価するシステムが知られている。例えば、特許文献1に記載の技術では、走行中の車速、ブレーキタイミング、車間距離などが適切であるかどうか、また、交差点における一旦停止があったかどうかを評価し、順位化及び得点化を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−186045号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、交差点に接続する道路において、車線に応じて交差点通過後に走行すべき道路が規定されている場合がある。一例として、右折専用レーンが挙げられる。右折専用レーンを走行している車両は、交差点にて右折しなければならないが、交差点を直進する車両が右折専用レーンを走行して直進する場合があり、この運転動作は危険である。しかしながら、特許文献1においては、交差点通過後に走行した道路に応じた車線を、交差点進入前に走行したかについての評価は行われていなかった。
本発明は、上述した問題点を解決するためになされたものであり、その目的は、交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載の運転支援装置は、交差点に進入する前に走行した進入車線を特定する進入車線特定手段と、交差点を退出した後に走行した退出道路を特定する退出道路特定手段と、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段と、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作であると判定する判定手段と、を備えることを特徴とする。
これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。したがって、適切な運転評価を運転者にフィードバックすることにより、運転者の技量向上の一助とすることができる。
【0006】
請求項2に記載の運転支援装置は、進入車線に対応づけられる進行すべき方向が案内されたか否かを判断する案内判断手段を備える。判定手段は、案内判断手段による判断結果に基づき、進入動作の危険度合いを判定する。
これにより、例えば、進行すべき方向が案内されていたにも関わらず退出道路と走行予定道路とが一致しない場合には、案内されていない場合と比べて悪質であるため、危険度合いが高いと判定することができ、進入動作の危険度合いを適切に判定することができる。
【0007】
請求項3に記載の運転支援装置は、交差点を退出した後に走行した退出車線を特定する退出車線特定手段と、進入車線に対応づけられる交差点退出後に走行すべき走行予定車線を特定する走行予定車線特定手段と、を備える。判定手段は、退出道路と走行予定道路とが一致する場合であって、退出車線と走行予定車線とが一致しない場合、交差点を通過する通過動作を危険動作であると判定する。
これにより、退出道路と走行予定道路とが一致していた場合であっても、退出車線と走行予定車線とが一致していなければ、交差点を通過する通過動作を危険動作と判定するので、交差点の通過に伴う運転動作をより適切に評価することできる。
【0008】
以上は、運転支援装置の発明として説明してきたが、次に示すようなプログラムの発明として実現することができる。
交差点に進入する前に走行した進入車線を特定する進入車線特定手段、交差点を退出した後に走行した退出道路を特定する退出道路特定手段、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作であると判定する判定手段、としてコンピュータを機能させるプログラムである。このようなプログラムを実行することで、上記と同様の効果が奏される。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態の運転支援装置の構成を示すブロック図である。
【図2】本発明の一実施形態の交差点通過情報取得処理を示すフローチャートである。
【図3】本発明の一実施形態の運転評価処理を示すフローチャートである。
【図4】本発明の一実施形態の走行すべき車線に関する情報を説明する説明図である。
【図5】本発明の一実施形態の走行すべき車線に関する情報を説明する説明図である。
【図6】本発明の一実施形態の走行すべき車線に関する情報を説明する説明図である。
【図7】本発明の一実施形態の過去運転情報テーブルを説明する説明図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態による運転支援装置を図面に基づいて説明する。
図1は、本実施形態による運転支援装置1の全体構成を示すブロック図である。運転支援装置1は、車両に搭載されているものであり、ナビゲーション装置2、車両ECU80、カメラ86等で構成されている。
【0011】
ナビゲーション装置2は、制御部10を中心に構成されており、制御部10に接続される位置検出器20、地図データ記憶部30、操作スイッチ群40、描画部50、音声出力部60、及び情報記憶部70等を備えている。
制御部10は、通常のコンピュータとして構成されており、内部にはCPU、ROM、I/O、及び、これらの構成を接続するバスラインなどが備えられている。
【0012】
位置検出器20は、車両の現在位置に関する位置情報を検出するものであって、いずれも周知の地磁気センサ21、ジャイロスコープ22、距離センサ23、および、衛星からの電波を受信するGPS(Global Positioning System)受信機24等を有している。これらの21〜24は、各々が性質の異なる誤差を持っているため、相互に補完しながら使用される。なお位置情報は、座標情報として検出される。
【0013】
地図データ記憶部30は、例えばハードディスク装置(HDD)として実現される記憶装置である。なお、本実施形態ではHDDを用いたが、メモリカード等の他の媒体を用いても差し支えない。地図データ記憶部30は、車両の位置検出の精度向上のため、また、経路を探索するためや探索された経路を案内するための地図データを記憶している。地図データに含まれる道路情報においては、交差点、合流点などの分岐点はノードとして、また、道路はノードとノードとを結ぶリンクとして定義されている。各リンクは、各リンクを特定するリンクIDに関連づけて進行方位、距離、車線数と車線の位置、車線を区切る路面上の線種パターン、道路種別等が属性情報として定義されている。なお、線種パターンとは、例えば図4のリンク1のように3つの車線が区画され、各車線を区画する区画線の形状が左から実線、破線、破線、実線であるとすると、リンク1の線種パターンを示す情報として「実線、破線、破線、実線」が記憶されている。また、各区画線の色が、形状とともに記憶されている。また、地図データに含まれる道路情報には、交差点(ノード)に接続する道路のそれぞれの車線に対し、交差点通過後に走行すべき道路である予定走行道路、及び交差点通過後に走行すべき車線である予定走行車線が対応づけられた車線情報が含まれている。また、ノードが交差点である場合、交差点の領域を示す情報がノードの位置座標と対応づけて、道路情報として記憶されている。
【0014】
操作スイッチ群40は、ディスプレイ51と一体になったタッチスイッチもしくはメカニカルなスイッチやリモコン装置等で構成され、各種入力に使用される。
描画部50には、ディスプレイ51が接続されている。ディスプレイ51は、液晶やCRTを用いたカラーディスプレイである。このディスプレイ51を介して情報表示が行われる。
音声出力部60にはスピーカ61が接続されており、このスピーカ61を介して音声による案内が行われる。
【0015】
情報記憶部70は、位置検出器20、車両ECU80、及びカメラ86等から取得された情報を記憶するためのものであり、地図データ記憶部30と同様のHDDで構成されている。もちろん、メモリカード等の他の媒体を用いてもよい。また、地図データ記憶部30と同一のHDDであってもよい。情報記憶部70には、交差点進入前に走行した進入道路及び進入車線、交差点退出後に走行した退出道路及び退出車線が記憶される。また、交差点進入時の信号の現示情報、及び交差点通過動作中の車速等が記憶される。また、情報記憶部70には、過去の危険動作に関する過去運転情報がデータベースとして交差点毎に記憶されている。
【0016】
車両ECU80は、エンジン、変速機、アクセル、ブレーキ等の作動を制御するものであり、制御部10と同様、通常のコンピュータとして構成されており、内部にはCPU、ROM、I/O、および、これらの構成を接続するバスラインなどが備えられている。車両ECU80には、アクセルペダルの踏み込み量を検出するアクセルセンサ81、ブレーキペダルの踏み込み量を検出するブレーキセンサ82、ステアリングの回転角を検出するステアリングセンサ83、車両の速度を検出する車速センサ84、ウィンカースイッチ85等が接続されている。
カメラ86は、例えばCCD等の固体撮像素子を用いたものであり、車両外部の全方位を撮像可能に構成されている。取得された映像情報は、情報記憶部70に記憶される。
【0017】
ところで、本実施形態においては、交差点の通過に伴う運転動作を適切に評価する点に特徴を有している。そこで、図2及び図3に示すフローチャートに基づいて運転評価処理について説明する。
図2に示す交差点通過情報取得処理は、車両走行中の所定の間隔、例えば100msec毎、に行われる処理である。最初のステップS101(以下、「ステップ」を省略し、単に記号「S」で示す)では、前方交差点の信号の現示情報を取得する。現示情報は、カメラ86によって取得された映像情報の画像を画像解析することにより取得する。
【0018】
S102では、車両が走行している道路の法定速度情報を取得する。法定速度情報は、カメラ86によって取得された路面上のペイント又は路側の標識の映像情報の画像を画像解析することにより取得する。
なお、S101及びS102で取得される現示情報及び法定速度情報は、図示しない情報センタや路側機から通信にて取得するように構成してもよい。また法定速度は、地図データ記憶部30に予め記憶されたデータから取得するように構成してもよい。
【0019】
S103では、車両の位置情報及び道路情報に含まれる交差点の領域を示す情報に基づき、交差点に進入したか否かを判断する。交差点に進入していない場合(S103:NO)、S104以降の処理を行わない。交差点に進入した場合(S103:YES)、S104へ移行する。
S104では、交差点に進入する前に走行していた進入道路及び進入車線を特定し、当該進入車線の車線情報を含む道路情報を地図データ記憶部30から取得する。進入道路は、車両の位置情報と地図データとに基づいてマップマッチング処理を行うことにより、進入した交差点に繋がるリンクが進入道路として特定される。なお、特定された進入道路を進行した進行方位が併せて特定される。また、進入車線は、特定された進入道路の線種パターンと、カメラ86によって取得された映像情報の画像を画像解析することにより取得される区画線の線種パターンと、に基づいて特定される。例えば、車両が図4に示すリンク1を走行している場合、車両を基準としてすぐ左側の区画線が実線であり、すぐ右側の区画線が破線である場合、当該車両は左側の車線を走行していると特定される。同様の例において、車両を基準として両側の区画線がともに破線である場合、当該車両は真ん中の車線を走行していると特定される。また同様の例において、車両を基準としてすぐ左側の区画線が破線であり、すぐ右側の区画線が実線である場合、当該車両は右車線を走行していると特定される。なお、片側4車線以上の道路においては、車両のすぐとなりの区画線に加えて他の区画線の情報も用いることにより特定することができる。
【0020】
S105では、S104で取得した道路情報に基づき、交差点退出後に走行すべき走行予定道路を特定する。具体的には、進入車線が右折専用レーンであれば、交差点を右折した先の道路が走行予定道路として特定される、といった具合である。詳細については後述する。
S106では、S104で取得した道路情報に基づき、交差点退出後に走行すべき走行予定車線を特定する。具体的には、交差点を直進する場合、進入車線が左車線であれば、左車線が走行予定車線として特定される、といった具合である。詳細については後述する。
【0021】
S107では、車両の位置情報及び道路情報に含まれる交差点の領域を示す情報に基づき、交差点から退出したか否かを判断する。交差点から退出していない場合(S107:NO)、この判断処理を繰り返す。交差点から退出した場合(S107:YES)、S108へ移行する。
【0022】
S108では、車両の位置情報と道路情報とに基づき、S104にて進入道路を特定した方法と同様の方法にて交差点退出後に走行した退出道路を特定する。
S109では、車両の位置情報と道路情報とに基づき、S104にて進入車線を特定した方法と同様の方法にて交差点退出後に走行した退出車線を特定する。また、交差点通過フラグをセットし、交差点を示すノードに対応付けて、信号の現示情報、法定速度情報、交差点に進入したときの車速、進入道路、進入車線、走行予定道路、走行予定車線、退出道路及び退出車線を記憶部70に記憶し、交差点通過情報取得処理を終了する。
【0023】
図3に示す運転評価処理は、車両走行中の所定の間隔、例えば100msec毎、に行われる処理であり、車両の動作が危険動作であると判定された場合には、運転の評価を示す運転評価点を減点する態様で、運転の評価を行うように構成されている。
S201では、S109にてセットされる交差点通過フラグがセットされているか否かを判断する。交差点通過フラグがセットされていない場合(S201:NO)、S202以降の処理を行わない。交差点通過フラグがセットされている場合(S201:YES)、S202へ移行する。
【0024】
S202では、S101にて取得した信号の現示情報に基づき、交差点に進入したときの信号の現示が青であったか否かを判断する。なお、矢印信号がある場合には、その矢印の方向に走行した場合は現示が青であったとみなし、その他の方向に走行した場合は現示が青ではなかったとみなす。例えば、交差点に進入したときの信号の現示が赤+右矢印であったとすると、当該交差点を右折した場合は現示が青であったとみなし、左折及び直進した場合は、現示が青ではなかったとみなす。本実施形態では、進入道路と退出道路との交点であるノードから進入道路を進行方向に延長した仮想直線と退出道路とのなす角が、仮想直線に対し時計回りに15度以上105度未満であった場合、車両は右折した、と判断する。また、進入道路と退出道路との交点であるノードから進入道路を進行方向に延長した仮想直線と退出道路とのなす角が、仮想直線に対し反時計回りに15度以上105度未満であった場合、車両は左折した、と判断する。また、進入道路と退出道路との交点であるノードから進入道路を進行方向に延長した仮想直線と退出道路とのなす角が、仮想直線に対し時計回りに15度以下、又は反時計回りに15度以下であった場合、車両は直進した、と判断する。信号の現示が青であった場合(S202:YES)、S204へ移行する。信号の現示が青でなかった場合(S202:NO)、S203へ移行する。
【0025】
S203では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された運転評価点の基礎点から減点する。なお、本実施形態における通過動作とは、交差点に進入するところから退出するところまでの一連の動作をいうものであって、交差点に進入する進入動作、及び交差点から退出する退出動作を含むものとする。
【0026】
S204では、交差点通過動作中の車速とS102にて取得した法定速度情報とに基づき、交差点通過動作中の車速が法定速度内であったか否かを判断する。法定速度内であった場合(S204:YES)、S206へ移行する。法定速度内でなかった場合(S204:NO)、S205へ移行する。
S205では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された基礎点から減点する。
【0027】
S206では、S108で特定された退出道路と、S105で特定された走行予定道路とが一致するか否かを判断する。退出道路と走行予定道路とが一致する場合(S206:YES)、S210へ移行する。退出道路と走行予定道路とが一致しない場合(S206:NO)、S207へ移行する。
S207では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された基礎点から減点する。なお、詳細にいえば、交差点に進入する進入動作が危険動作であると判定する、ということである。
【0028】
S208では、進入車線に関する案内が交差点通過前にあったか否かを判断する。本実施形態における進入車線に関する案内とは、ディスプレイ51上に、進入車線ごとに対応する走行予定道路等が矢印によって表示されるものである。また、進入車線に関する案内は、「現在進行中のレーンは、右折専用レーンです」といったスピーカ61を介した音声案内であってもよい。このような案内は、本処理とは別途に行われる処理に基づいて行われるものであって、例えば、目的地への経路案内が行われている場合、経路と共に案内される。進入車線に関する案内がなかった場合(S208:NO)、S214へ移行する。進入車線に関する案内があった場合(S208:YES)、S209へ移行する。
【0029】
S209では、進入車線に関する案内があったにも関わらず、退出道路と走行予定道路が一致しなかったため、案内がなかった場合と比べて悪質であり、S207にて危険動作と判定された交差点を通過する通過動作の危険度合いが高いと判定し、さらに評価を下げる。具体的には、予め設定された基礎点からさらに減点する。
【0030】
退出道路と走行予定道路とが一致する場合(S206:YES)に移行するS210では、S109で特定された退出車線とS106で特定された走行予定車線とが一致するか否かを判断する。退出車線と走行予定車線とが一致する場合(S210:YES)、S214へ移行する。退出車線と走行予定車線とが一致しない場合(S210:NO)、S211へ移行する。
S211では、交差点を通過する通過動作が危険動作であると判定し、評価を下げる。具体的には、予め設定された基礎点から減点する。
【0031】
S212では、進入車線及び走行予定車線に関する案内が交差点通過前にあったか否かを判断する。本実施形態における進入車線及び走行予定車線に関する案内とは、例えば、進入車線から走行予定車線にかけて交差点を跨ぐようにして描かれる矢印として、ディスプレイ51上に表示されるものである。このような案内は、本処理とは別途に行われる処理に基づいて行われるものであって、例えば、目的地への経路案内が行われている場合、経路と共に案内される。進入車線及び走行予定車線に関する案内がなかった場合(S212:NO)、S214へ移行する。進入車線及び走行予定車線に関する案内があった場合(S212:YES)、S213へ移行する。
【0032】
S213では、進入車線及び走行予定車線に関する案内があったにも関わらず、退出車線と走行予定車線とが一致しなかったため、案内がなかった場合と比べて悪質であり、S211にて危険動作と判定された交差点を通過する通過動作の危険度合いが高いと判定し、さらに評価を下げる。具体的には、予め設定された基礎点からさらに減点する。
【0033】
S214では、交差点を通過する通過動作に関する情報を過去運転情報に追加する。具体的には、図7に示すような過去運転情報テーブルが交差点毎に記憶されており、本処理にて危険動作と判定された項目の数値をインクリメントする。すなわち、交差点に進入したときの信号現示が青ではなく(S202:NO)、危険動作と判定された場合(S203)、「信号無視」に対応する値をインクリメントする。交差点通過動作中の車速が法定速度内ではなく(S204:NO)、危険動作と判定された場合(S205)、「速度オーバー」に対応する値をインクリメントする。退出道路と走行予定道路とが一致せず(S206:NO)、危険動作と判定された場合(S207)、「道路不一致」に対応する値をインクリメントする。退出車線と走行予定車線とが一致せず(S210:NO)、危険動作と判定された場合(S211)、「車線不一致」に対応する項目をインクリメントする。なお、交差点を通過する通過動作がいずれのステップにおいても危険動作と判定されなかった場合(S202:YES、S204:YES、S206:YES、S210:YES)には、過去運転情報テーブルの変更は行わない。そして、交差点通過フラグをリセットし、本処理を終了する。
そして、運転終了時における別の処理として、運転評価点が基準点を下回った場合には、ディスプレイ51やスピーカ61を介して運転評価点が基準点を下回った旨の警告情報を通知する。
【0034】
ここで、走行予定道路及び走行予定車線と進入車線との関係の具体例を図4、及び図5に基づいて説明する。
図4に示すように、交差点Xは、片側3車線の道路と片側1車線の道路が交わる交差点である。ここでは、リンク1から交差点Xに進入する場合を例に説明する。この場合、リンク1が「進入道路」に対応している。
【0035】
リンク1のレーン1から交差点Xに進入した場合、交差点X退出後に走行すべき走行予定道路は、リンク2又はリンク3である。また、交差点X退出後に走行すべき走行予定車線はリンク2のレーン1又はリンク3のレーン1である。この場合、リンク1のレーン1が「進入車線」に対応している。
リンク1のレーン2から交差点Xに進入した場合、交差点X退出後に走行すべき走行予定道路は、リンク3である。また、交差点X退出後に走行すべき走行予定車線は、リンク3のレーン2である。この場合、リンク1のレーン2が「進入車線」に対応している。
リンク1のレーン3から交差点Xに進入した場合、交差点X退出後に走行すべき走行予定道路は、リンク4である。また、交差点X退出後に走行すべき走行予定車線は、リンク4のレーン1である。この場合、リンク1のレーン3が「進入車線」に対応している。
以上をまとめると、図5に示すテーブルのごとくであり、このようなデータが車線情報として地図データ記憶部30に記憶されている。
【0036】
続いて、図4及び図5を用いて説明した交差点Xを通過する通過動作を評価する運転評価処理の具体例を図6に基づいて説明する。
まず、車両Pが走行軌跡Rに示すように走行して交差点Xを通過したものとする。なお、交差点Xに進入するときの信号の現示は赤+右矢印であり、交差点通過動作中の車速は法定速度内であったものとする。
車両Pが交差点Xに進入したとき(S103:YES)、交差点Xに進入する前に走行していた進入道路および進入車線を特定する(S104)。進入道路はリンク1であり、進入車線はリンク1のレーン3であるので、これに基づき、走行予定道路をリンク4と特定し、走行予定車線をリンク4のリンク1と特定する(S105、S106)。そして車両Pが交差点Xから退出したとき(S107:YES)、交差点退出後に走行した退出道路をリンク4、退出車線をリンク4のレーン1と特定する(S108、S109)。
【0037】
走行軌跡Rで走行した車両Pが交差点Xを通過する通過動作を評価すると、車両Pが交差点Xに進入したときの信号の現示は赤+右矢印であり、車両Pは交差点Xを右折したので、信号の現示は青であったとみなす(S202:YES)。車両Pは交差点Xを法定速度内で走行している(S204:YES)。また、退出道路がリンク4であり、走行予定道路がリンク4であるので、退出道路と走行予定道路とは一致している(S206:YES)。また、退出車線がリンク4のレーン1であり、走行予定車線がリンク4のレーン1であるので、退出車線と走行予定車線とは一致している(S210:YES)。したがって、車両Pが走行軌跡Rで交差点Xを通過した通過動作は、いずれのステップにおいても危険動作と判定されなかったので、過去運転情報テーブルの変更は行わず、運転評価処理を終了する。
【0038】
次に、車両Pが走行軌跡Sに示すように走行して交差点Xを通過したものとする。なお、交差点Xに進入するときの信号の現示は赤+右矢印であり、交差点通過動作中の車速は法定速度内ではなかったものとする。また、交差点Xに進入する前には、ディスプレイ51には、進入車線ごとに対応する走行予定道路が矢印によって表示され、スピーカ61より「現在進行中のレーンは、右折専用レーンです」という音声案内が行われていたものとする。
【0039】
車両Pが交差点Xに進入したとき(S103:YES)、交差点Xに進入する前に走行していた進入道路および進入車線を特定する(S104)。進入道路はリンク1であり、進入車線はリンク1のレーン3であるので、これに基づき、走行予定道路をリンク4と特定し、走行予定車線をリンク4のレーン1と特定する(S105、S106)。そして、車両Pが交差点Xから退出したとき(S107:YES)、交差点退出後に走行した退出道路をリンク3、退出車線をリンク3のレーン3と特定する(S108、S109)。
【0040】
走行軌跡Sで走行した車両Pが交差点Xを通過する通過動作を評価すると、車両Pが交差点Xに進入したときの信号の現示は赤+右矢印であり、車両Pは交差点Xを直進したので、信号の現示は青でなかったとみなし(S202:NO)、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S203)。車両Pは交差点Xを法定速度内で通過していないので(S204:NO)、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S205)。また、退出道路がリンク3であり、走行予定道路がリンク4であるので、退出道路と走行予定道路とが一致していない(S206:NO)。したがって、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S207)。さらに、進入車線に関する案内が行われていたので(S208:YES)、S207にて危険動作と判定された交差点を通過する通過動作の危険度合いが高いと判定し、さらに評価を下げる(S209)。そして、交差点Xを通過する通過動作に関する情報を過去運転情報に追加する(S214)。この例においては、図7(a)に示す過去運転情報テーブルの「信号無視」、「速度オーバー」、「道路不一致」の各項目の数値をインクリメントする。したがって、走行軌跡Sにて交差点Xを通過した後の過去運転情報テーブルは、図7(b)に示すごとくとなる。
【0041】
また別の例として、車両Pが走行軌跡Tに示すように走行して交差点Xを通過したものとする。なお、交差点Xに進入するときの信号の現示は青であり、交差点通過動作中の車速は法定速度内であったものとする。また、交差点Xに進入する前には、進入車線及び走行予定車線に関する案内は行われなかったものとする。
【0042】
車両Pが交差点Xに進入したとき(S103:YES)、交差点に進入する前に走行していた進入道路および進入車線を特定する(S104)。進入道路はリンク1であり、進入車線はリンク1のレーン2であるので、これに基づき、走行予定道路をリンク3と特定し、走行予定車線をリンク3のレーン2と特定する(S105、S106)。そして、車両Pが交差点Xから退出したとき(S107:YES)、交差点退出後に走行した退出道路をリンク3、退出車線をリンク3のレーン1と特定する(S108、S109)。
【0043】
走行軌跡Tで走行した車両Pの交差点Xを通過する通過動作を評価すると、車両Pが交差点Xに進入したときの信号の現示は青であり(S202:YES)、車両Pは交差点Xを法定速度内で走行している(S204:YES)。また、退出道路がリンク3であり、走行予定道路がリンク3であるので、退出道路と走行予定道路とが一致している(S206:YES)。一方、退出車線がリンク3のレーン1であり、走行予定車線がリンク3のレーン2であり、退出車線と走行予定車線とが一致していない(S210:NO)。したがって、車両Pは、交差点X内にて車線変更を行っており、交差点Xを通過する通過動作が危険動作であると判定し、評価を下げる(S211)。なお、進入車線及び走行予定車線に関する案内は行われていない(212:NO)。そして、交差点Xを通過する通過動作に関する情報を過去運転情報に追加する(S214)。この例においては、図7(a)に示す過去運転情報テーブルの「車線不一致」の項目の数値をインクリメントする。したがって、走行軌跡Tにて交差点Xを通過した後の過去運転情報テーブルは、図7(c)に示すごとくとなる。
【0044】
以上詳述したように、運転支援装置1は、交差点に進入する前に走行した進入車線を特定し(S104)、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する(S105)。また、交差点を退出後に走行した退出道路を特定し(S108)、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。したがって、適切な運転評価を運転者にフィードバックすることにより、運転者の技量向上の一助とすることができる。
【0045】
また、運転支援装置1は、退出道路と走行予定道路とが一致しない場合(S206:YES)、進入車線に対応づけられる進行すべき方向が案内されていたか否かに基づき(S208)、進入動作の危険度合いを判定する。本実施形態では、退出道路と走行予定道路とが一致せず(S206:YES)、進入車線に対応づけられる進行すべき方向が案内されていた場合(S208:YES)、危険度合いが高いと判定する(S209)。これにより、進行すべき方向が案内されていたにも関わらず退出道路と走行予定道路とが一致しない場合には、案内されていない場合と比べて悪質であるため、危険度合いが高いと判定することができ、進入動作の危険度合いを適切に判定することができる。
【0046】
さらにまた、運転支援装置1は、進入車線に対応づけられる交差点退出後に走行すべき走行予定車線を特定する(S106)。また、交差点退出後に走行した退出車線を特定し(S109)、退出道路と走行予定道路とが一致する場合であって(S206:YES)、退出車線と走行予定車線とが一致しない場合(S210:NO)、交差点を通過する通過動作を危険動作であると判定する(S211)。これにより、退出道路と走行予定道路とが一致していた場合であっても、退出車線と走行予定車線とが一致していなければ、交差点を通過する通過動作を危険動作と判定するので、交差点の通過に伴う運転動作をより適切に評価することができる。
【0047】
なお、本実施形態における制御部10が、「進入車線特定手段」、「退出道路特定手段」、「走行予定道路特定手段」、「判定手段」、「案内判断手段」、「退出車線特定手段」、及び「走行予定車線特定手段」を構成する。また、S104が「進入車線特定手段」の機能としての処理に相当し、S108が「退出道路特定手段」の機能としての処理に相当し、S105が「走行予定道路特定手段」の機能としての処理に相当し、S203、S205、S207、S209、S211、及びS213が「判定手段」の機能としての処理に相当する。また、S208、S212が「案内判定手段」の機能としての処理に相当し、S109が「退出車線特定手段」の機能としての処理に相当し、S106が「走行予定車線特定手段」の機能としての処理に相当する。
以上、本発明は上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない難易において種々の形態で実施可能である。
【0048】
(ア)判定手段
走行予定道路と退出道路とが一致しない場合であっても、走行予定道路が走行できない場合には、危険動作と判定しないように構成してもよい。すなわち、S206にて否定判断された後に、走行予定道路の走行が可能か否かを判断する判断処理を設け、走行予定道路を走行可能である場合はS207へ移行して危険動作と判定し、走行可能でない場合は、S207〜S213の処理を行わず、S214へ移行する。
【0049】
同様に、走行予定車線と退出車線が一致しない場合であっても、走行予定道路が走行できない場合には、危険動作と判定しないように構成してもよい。すなわち、S210にて否定判断された後に、走行予定車線の走行が可能か否かを判断する判断処理を設け、走行予定車線を走行可能である場合はS211へ移行して危険動作と判定し、走行可能でない場合、S211〜S213の処理を行わず、S214へ移行する。
走行予定道路や走行予定車線が走行できない場合とは、通行止めである場合や障害物がある場合などが例示される。このような情報は、カメラ86によって取得してもよいし、図示しない情報センタ等から通信にて取得してもよい。
【0050】
また、特定の危険動作について常習性があると判断された場合、危険度合いが高いと判定するように構成してもよい。常習性の有無の判断は、過去運転情報を参照し、運転動作に対応する値が所定値(例えば5回)以上である場合、常習性がある、と判断することができる。常習性がある、と判断された場合、上記実施形態のS203、S205、S207及びS211で危険動作と判定された運転動作に対し、さらに減点(例えば10点)するように構成してもよい。
【0051】
(イ)判定結果の利用方法
上記実施形態では、危険動作と判定された場合、予め設定された基礎点から減点して運転評価点を算出した。上記実施形態では、減点幅については特に言及していないが、危険動作と判定された要因ごとに同じ点数としてもよいし、要因毎に点数を変えてもよい。要因毎に点数を変える場合の例としては、信号無視(S203)、速度オーバー(S205)、道路不一致(S207)、車線不一致(S209)が、この順で危険度が高いとすると、信号無視(S203)では40点、速度オーバー(S205)では30点、道路不一致(S207)では20点、車線不一致(S203)では10点減点する、といった具合である。また、案内があったにも関わらず道路不一致、或いは車線不一致だった場合(S208:YES、またはS212:YES)には、さらに5点減点とすることができる。
また、減点方式ではなく、危険動作と判定された場合に加点する加点方式にて運転評価点を算出し、運転評価を行ってもよい。この場合、点数が高いほど悪い評価であり、例えば運転終了時に評価点が基準点を上回った場合に警告を行うように構成してもよい。
【0052】
また、運転評価結果は、運転終了時に運転評価点が基準点を下回った場合に警告を行うように構成していた。その他に、危険動作を行った場合にリアルタイムに警告を行ってもよい。また、危険動作と判定された運転動作がなされた地点の位置座標を記憶しておき、当該地点を再度通行する際に、危険動作を行った地点である旨の情報を運転者に通知し、注意喚起するように構成してもよい。また、運転評価結果を、情報センタに送信し、他の運転者の走行情報を参照してランキングを行ってもよい。
【0053】
(ウ)運転支援装置
上記実施形態では、ナビゲーション装置が運転支援装置を構成していたが、車両の走行情報を情報センタに送信し、情報センタにて上述の処理を行うようにしてもよい。すなわち、情報センタが運転支援装置を構成してもよい。
【符号の説明】
【0054】
1:運転支援装置、2:ナビゲーション装置、10:制御部(進入車線特定手段、退出道路特定手段、走行予定道路特定手段、判定手段、案内判断手段、退出車線特定手段、走行予定車線特定手段)、20:位置検出器、21:地磁気センサ、22:ジャイロスコープ、23:距離センサ、24:GPS受信機、30:地図データ記憶部、40:操作スイッチ群、50:描画部、51:ディスプレイ、60:音声出力部、61:スピーカ、70:情報記憶部、80:車両ECU、81:アクセルセンサ、82:ブレーキセンサ、83:ステアリングセンサ、84:車速センサ、85:ウィンカースイッチ、86:カメラ
【特許請求の範囲】
【請求項1】
交差点に進入する前に走行した進入車線を特定する進入車線特定手段と、
前記交差点を退出した後に走行した退出道路を特定する退出道路特定手段と、
前記進入車線に対応づけられる前記交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段と、
前記退出道路と前記走行予定道路とが一致しない場合、前記交差点に進入する進入動作を危険動作であると判定する判定手段と、
を備えることを特徴とする運転支援装置。
【請求項2】
前記進入車線に対応づけられる進行すべき方向が案内されたか否かを判断する案内判断手段を備え、
前記判定手段は、前記案内判断手段による判断結果に基づき、前記進入動作の危険度合いを判定することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記交差点を退出した後に走行した退出車線を特定する退出車線特定手段と、
前記進入車線に対応づけられる前記交差点退出後に走行すべき走行予定車線を特定する走行予定車線特定手段と、
を備え、
前記判定手段は、前記退出道路と前記走行予定道路とが一致する場合であって、前記退出車線と前記走行予定車線とが一致しない場合、前記交差点を通過する通過動作を危険動作であると判定することを特徴とする請求項1または2に記載の運転支援装置。
【請求項4】
交差点に進入する前に走行した進入車線を特定する進入車線特定手段、
前記交差点を退出した後に走行した退出道路を特定する退出道路特定手段、
前記進入車線に対応づけられる前記交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段、
前記退出道路と前記走行予定道路とが一致しない場合、前記交差点に進入する進入動作を危険動作であると判定する判定手段、
としてコンピュータを機能させるプログラム。
【請求項1】
交差点に進入する前に走行した進入車線を特定する進入車線特定手段と、
前記交差点を退出した後に走行した退出道路を特定する退出道路特定手段と、
前記進入車線に対応づけられる前記交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段と、
前記退出道路と前記走行予定道路とが一致しない場合、前記交差点に進入する進入動作を危険動作であると判定する判定手段と、
を備えることを特徴とする運転支援装置。
【請求項2】
前記進入車線に対応づけられる進行すべき方向が案内されたか否かを判断する案内判断手段を備え、
前記判定手段は、前記案内判断手段による判断結果に基づき、前記進入動作の危険度合いを判定することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記交差点を退出した後に走行した退出車線を特定する退出車線特定手段と、
前記進入車線に対応づけられる前記交差点退出後に走行すべき走行予定車線を特定する走行予定車線特定手段と、
を備え、
前記判定手段は、前記退出道路と前記走行予定道路とが一致する場合であって、前記退出車線と前記走行予定車線とが一致しない場合、前記交差点を通過する通過動作を危険動作であると判定することを特徴とする請求項1または2に記載の運転支援装置。
【請求項4】
交差点に進入する前に走行した進入車線を特定する進入車線特定手段、
前記交差点を退出した後に走行した退出道路を特定する退出道路特定手段、
前記進入車線に対応づけられる前記交差点を退出した後に走行すべき走行予定道路を特定する走行予定道路特定手段、
前記退出道路と前記走行予定道路とが一致しない場合、前記交差点に進入する進入動作を危険動作であると判定する判定手段、
としてコンピュータを機能させるプログラム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−2893(P2011−2893A)
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2009−143363(P2009−143363)
【出願日】平成21年6月16日(2009.6.16)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成21年6月16日(2009.6.16)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]