
運転支援装置及び運転支援方法
【課題】障害物警報の発令と経路提示とが共に行われることによる運転者の注意力の低下を防止し且つ煩わしさ感を与えることを回避する。
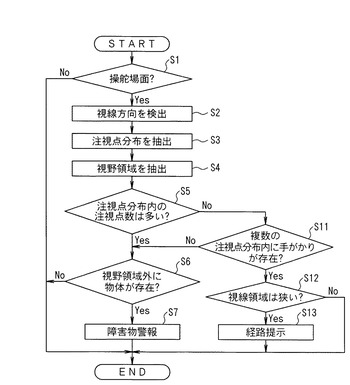
【解決手段】操舵場面で、注視対象物の占有面積とこの注視対象物に対する注視点数との比率から運転負荷が大きいか又は運転技術レベルが低い状態であり、運転者の注視対象物は障害物である可能性が高いと判断されるときは、視野領域外に障害物が存在するとき障害物警報を発する(ステップS5〜S7)。前記比率から運転負荷が小さいか又は運転技術レベルが高い状態であり且つ手がかり情報を満足する注視対象物がしきい値以上あるときは、注視対象物は手がかりとなり得る物体であると判断し、視野領域が狭いとき経路提示を行う(ステップS11〜ステップS13)。手がかり情報を満足する注視対象物がしきい値よりも少ないときは、注視対象物は障害物であると判断し視野領域外に障害物が存在するとき障害物警報を発する。
【解決手段】操舵場面で、注視対象物の占有面積とこの注視対象物に対する注視点数との比率から運転負荷が大きいか又は運転技術レベルが低い状態であり、運転者の注視対象物は障害物である可能性が高いと判断されるときは、視野領域外に障害物が存在するとき障害物警報を発する(ステップS5〜S7)。前記比率から運転負荷が小さいか又は運転技術レベルが高い状態であり且つ手がかり情報を満足する注視対象物がしきい値以上あるときは、注視対象物は手がかりとなり得る物体であると判断し、視野領域が狭いとき経路提示を行う(ステップS11〜ステップS13)。手がかり情報を満足する注視対象物がしきい値よりも少ないときは、注視対象物は障害物であると判断し視野領域外に障害物が存在するとき障害物警報を発する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両前方の障害物の存在を通知する障害物報知支援や、曲路等で自車両の最適な走行経路を表示する経路表示支援等、複数の支援を実行することの可能な運転支援装置において、現時点で運転者が必要としている支援情報のみを情報提供するようにした運転支援装置及び運転支援方法に関する。
【背景技術】
【0002】
従来、運転支援装置として、自車両が障害物に接近していることを運転者に報知する、いわゆる障害物接近警報装置が知られている。この障害物接近警報装置を車両に搭載する際の課題として、警報が頻繁に発生することにより、運転者に煩わしさ感を与えるという問題がある。つまり、障害物警報では、障害物の検出精度が高まり、運転者への報知の頻度が増えるほど、運転者にとって頻繁な報知による煩わしさ感が増えるという、矛盾要素を持っている。このため、この矛盾を解決するための技術の開発が押し進められている。例えば、基本的には、運転者が一度障害物に視線を配ったならば、運転者はその障害物を認識したと判定し、以後、この障害物に対する障害物警報を行わないように警報制御を行うようにしたものが提案されている(例えば、特許文献1参照)。このような警報制御を行うことによって、頻繁な警報の発令を低減し、運転者にとっても煩わしさ感を低減することができる。
【特許文献1】特開2004−210213号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、運転者に情報を提供する運転支援装置としては、障害物接近警報装置だけでなく、曲路等で自車両の最適経路を情報提示するようにした経路情報提示装置等といった数々の支援装置が提案されているが、これら複数の運転支援装置を提供するにあたっては、個々の運転支援装置のみならず、車両に搭載された全ての運転支援装置の関係性を考慮した上で、運転支援を行う必要がある。すなわち、元来、警報等を発する運転支援装置は、運転者の注意を引きつけるものである。たとえ、障害物警報の警報提示を運転者の認知情報に合致する形で行ったとしても、同時に他の運転支援装置から不用意な情報提供が行われた場合には、運転者は、他の運転支援装置に対する煩わしさ感を意識するほか、複数の運転支援装置の集合体である、「運転支援システム」に対する注意が要求され、運転者の煩わしさ感は増加する。また、状況によっては、運転者が配分することの可能な注意量の総量を越えてしまうことも考えられる。
【0004】
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、種類の異なる複数の運転支援を行うにあたり、同時に複数の運転支援情報が提示されることにより、かえって運転者に対して煩わしさ感を与えることを回避することの可能な運転支援装置及び運転支援方法を提供することを目的としている。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明に係る運転支援装置は、支援内容の異なる運転支援情報を提供する複数の運転支援手段を備えた運転支援装置において、注視対象判別手段によって、運転者の注視対象物を検出すると共にその種別を判別し、判別した注視対象物の種別に基づいて、運転者が現在必要としている運転支援情報を推測する。そして、複数の運転支援手段のうち、運転者が必要としている運転支援情報を提供する運転支援手段のみを作動させる。
【発明の効果】
【0006】
本発明に係る運転支援装置によれば、運転者の注視対象物の種別に基づいて、運転者が現在必要としている運転支援情報を推測し、この推測した、運転者が必要としている運転支援情報を提要する運転支援手段のみを作動させるようにしたから、運転者が必要としている運転支援情報については確実に提供しつつ、複数の運転支援が行われることにより運転者に煩わしさ感を与えることを回避することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態を説明する。
まず、第1の実施の形態を説明する。
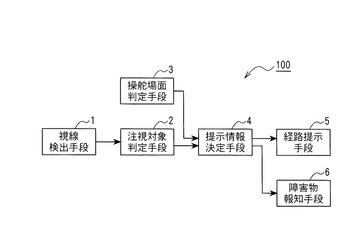
図1は、本発明における運転支援装置100の機能構成を示すブロック図である。
図中1は、運転者の視線方向を検出するための視線検出手段、2は、視線検出手段で検出した視線方向から運転者が注視している注視対象物に対する運転者の視線行動から、運転者の注視対象物が何かを判定する注視対象判定手段、3は、運転者が操舵を行う必要のある運転状態にあるかどうかを判定する操舵場面判定手段、4は、提示情報決定手段であって、注視対象判定手段の検出結果及び操舵場面判定手段の判定結果に基づいて、曲路等で自車両の最適経路を提示するための経路提示手段5及び自車両前方の障害物の存在を運転者に報知するための障害物報知手段6のうちのいずれによる情報提示を行うかを判断する。
【0008】
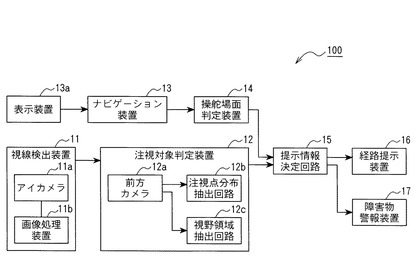
図2は、運転支援装置100のより具体的な機能構成を示す機能ブロック図である。
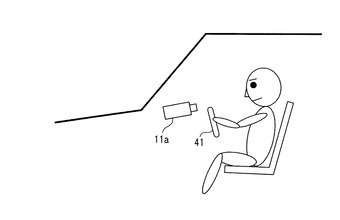
図中11は、視線検出装置であって、この視線検出装置11は、図3に示すように、運転者の眼球等を撮像するための一対のアイカメラ11aと、このアイカメラ11aの撮像画像から、公知の手順で運転者の視線方向を検出するための画像処理装置11bとを備えている。なお、図3中の41はステアリングホイールである。この視線検出装置11で検出された運転者の視線方向は、注視対象判定装置12に入力される。
【0009】
この注視対象判定装置12は、自車両前方の走行路を撮像するための前方カメラ12a、前方カメラ12aの撮像画像と視線検出装置11で検出した視線方向とを重ね合わせ、撮像画像上において走行経路上の障害物や、道路白線、ガードレール等といった走行路上の物体(以後、抽出物体ともいう。)を抽出すると共に、運転者の視線が滞留する地点を注視点として検出し、前記抽出物体に対する注視点の分布状況を検出する注視点分布抽出回路12b、及び視線検出装置11で検出した運転者の視線方向から運転者の上下方向及び左右方向の視線の移動範囲を求め、運転者の視野領域を抽出する視野領域抽出回路12c、を備えている。
【0010】
また、車両には、ナビゲーション装置13が搭載され、このナビゲーション装置13は、マップマッチング法、或いは、GPS等の自車両の現在位置を検出する自車位置検出手段と道路地図情報とを備え、自車位置検出手段で検出した自車両周辺の道路地図情報を、その表示装置13aに表示すると共に、自車両の現在位置及び自車両の現在位置周辺の道路地図情報を、操舵場面判定装置14に出力する。この操舵場面判定装置14は、自車両の道路地図情報に基づいて自車両前方にカーブや右折地点、左折地点等の曲路が存在し、自車両が操舵を行う必要のある状況にあるかどうかを判断する。
【0011】
この操舵場面判定装置14の判定結果及び注視対象判定装置12の判定結果は、提示情報決定回路15に入力され、提示情報決定回路15は、前記操舵場面判定装置14からの操舵を行う必要のある状況にあるかどうかや、運転者の運転技量レベルや運転者の運転負荷等の点から、障害物警報を発するか経路表示を行うかを判断し、その結果に応じて経路提示装置16又は障害物警報装置17の何れか一方のみを作動する。
【0012】
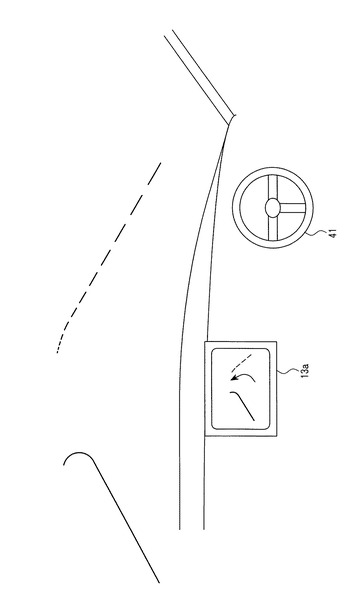
前記経路提示装置16は、曲路において、この曲路を走行するにあたって、安定した車両挙動での走行を可能とするための最適な走行経路を運転者に明示する。例えば、前記ナビゲーション装置13の表示装置13aにおいて、自車両周辺の道路地図情報に代えて、曲路における自車両の最適経路を拡大表示したり、あるいは、ヘッドアップディスプレイ(HUD)を用い、自車両が進むべき最適経路を前方の風景と直接的に重ね合わせたりすることにより、経路表示を行う。
【0013】
前記自車両の最適経路は、例えば、ナビゲーション装置13からの道路地図情報に曲路の旋回半径等の曲路の形状を表す曲路情報を含めておき、このナビゲーション装置13からの道路地図情報から獲得した曲路情報と、自車両の走行速度、自車両の操舵角度等に基づいて、公知の手順で、自車両が安定した車両挙動で走行することの可能な理想的な経路を推測し、これを最適経路として表示すればよい。
また、前記障害物警報装置17は、前記提示情報決定回路15で、障害物警報の発令が必要と判断されたとき障害物警報を発する。
【0014】
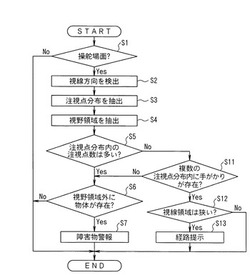
次に、運転支援装置100の動作を、図4のフローチャートに基づいて説明する。
ナビゲーション装置13では、自車両の現在位置を検出すると共に自車両の現在位置周辺の道路地図情報を抽出し、表示装置13aに道路地図情報を表示して運転者に自車両の現在位置を認識させると共に、自車両の現在位置及び自車両周辺の道路地図情報を操舵場面判定装置14に出力する。操舵場面判定装置14では、道路地図情報をもとに、自車両前方に、曲路が存在し、操舵を行う必要のある状況どうかを判断する(ステップS1)。そして、操舵を行う必要のない状況であるときには、略直進走行をしている状態であることから、経路表示を行う必要はない。また、略直進走行を行っており、運転者は障害物のみに注意を払えばよい状況にあるため、障害物警報の発令は不要と判断し、そのまま処理を終了する。
【0015】
一方、視線検出装置11では、アイカメラ11aで運転者の眼球を撮像すること等により、撮像画像から運転者の視線方向を検出する(ステップS2)
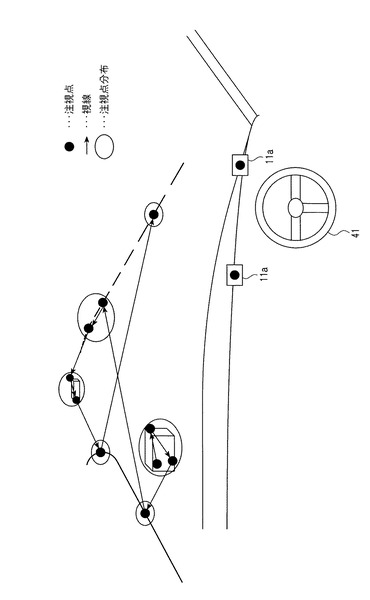
続いて、注視対象判定装置12では、運転者の注視点の分布である、注視点分布を抽出する(ステップS3)。通常、人は物体を認識する場合、この認識対象である対象物上に視線を動かすことで認識する。この結果として、対象物上には、運転者が対象を認識するまでの過程において視線が滞留する点である注視点が分布することになる。そこで、前方カメラ12aによって自車両前方の道路を撮像し、公知の手順で画像処理を行って自車両前方の障害物や道路白線、ガードレール或いは縁石等といった走行路上の物体を抽出物体として検出すると共に、車両前方の風景からなる撮像画像と、ステップS2で算出した、所定時間当たりの運転者の視線方向とを重ね合わせることで、検出された走行路上の抽出物体のうち、運転者の視線が注がれた抽出物体を検出してこれを注視対象物とし、自車両前方の少なくとも一つ以上の注視対象物に注がれた運転者の視線において、個々の注視対象物に注がれた注視点の分布を注視点分布とし、これを注視点分布注視回路12bにおいて抽出する。例えば、図5に示すように、所定時間の間での前方風景における運転者の視線方向の変化状況から、視線が滞留する地点を注視点として検出する。そして、その注視点と重なる抽出物体を注視対象物として認識し、さらに各注視対象物に対する注視点の分布を検出する。
【0016】
例えば、図5に示すように、自車両の走行路上に障害物が存在する場合には、運転者は視線を移動させて障害物を認識することから注視点は障害物上に現れることになり、また、曲路を走行する場合等には、運転者はガードレールの位置や道路白線等を認識することで、走行車線における自車両の位置を認識し、滑らかに走行可能な経路や、楽な操舵で走行できる経路を選んでカーブを走行することから、ガードレールや道路白線に注視点が現れることになる。
なお、前記抽出物体は、例えば、撮像画像における輝度の変化状況等に基づいて公知の手順で検出すればよい。
【0017】
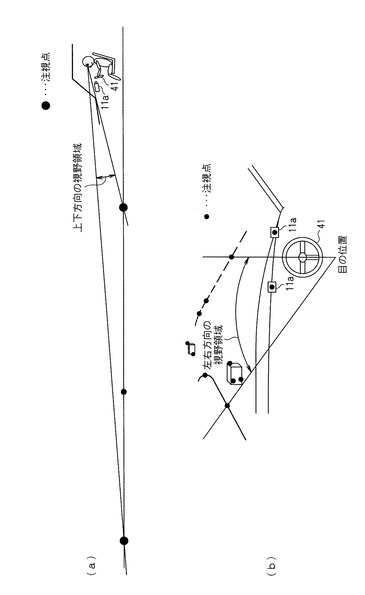
このようにして、注視点の分布を検出したならば、ステップS4に移行し、次に、注視対象判定装置12において、運転者の視界の広さである視野領域を抽出する。すなわち、通常、人は環境を認識するとき、視界全体に視線を動かすが、この視界の範囲は、運転技量や、運転負荷等によっても変化する。そこで、本実施形態においては、注視対象判定装置12の視野領域抽出回路12cにおいて、前記ステップS2で、視線検出装置11において検出した所定時間における運転者の視線方向をもとに、図6に示すように、運転者の上下方向の視線角度(図6(a))及び左右方向の角度(図6(b))を抽出し、視線角度の最大値及び最小値から求まる上下方向の視野領域と、左右方向の左端角度及び右端角度から求まる左右方向の視野領域を抽出する。
【0018】
前記ステップS5では、前記ステップS3で、注視対象判定装置12において算出した、自車両前方の個々の注視対象物に対する運転者の注視点分布において、注視点の点数が多いか少ないかを判定する。つまり、通常、運転者が対象物を認識するとき、運転者の運転技量のレベルが高いときほど、また、運転者に与えられた運転負荷が低いときほど、この対象物に対する注視点の点数は少なくなる傾向にある。そこで、本実施形態においては、前方カメラ12aで撮像した前方画像における、個々の注視対象物の占有面積と、その注視対象物における注視点の点数をもとに、注視点数比率(=占有面積/注視点の点数)を算出し、この注視点数比率が予め設定した注視点数比率のしきい値P以下であるときには、その注視対象物に対する注視点数は多いと判定する。そして、各注視対象物に対する注視点数比率のうち、しきい値P以下のものが一つ以上ある場合には、運転者の運転技量のレベルが低いかあるいは運転負荷が高い状態であると予測できることから、運転者の注視対象物は、障害物である可能性が高いと判断し、ステップS6に移行する。
【0019】
一方、注視対象物に対する注視点数比率が、前記注視点数比率のしきい値Pより大きいときには、その注視対象物に対する注視点数は少ないと判定する。そして、全ての注視対象物に対する注視点数比率が、前記注視点数比率のしきい値Pより大きいときには、この運転者の運転技量のレベルが高いか又は運転負荷が低い状態であると判定し、ステップS11に移行する。
【0020】
なお、前記占有面積は、前記ステップS3で抽出した抽出物体について、撮像画像における占有面積を推測すればよい。
なお、ここでは、個々の注視対象物に対する注視点数から注視点数比率を算出し、何れかの注視対象物の注視点数比率がそのしきい値P以下であるときに、運転者の運転技量のレベルが低いか、運転負荷が大きく、運転者の注視対象物は障害物である可能性が高いと判断するようにしているが、これに限るものではなく、例えば、複数の注視対象物に対する注視点数比率の平均値等、注視対象物に対する注視点数の分布状況から、運転者の運転技量のレベルが低いか、あるいは運転負荷が高い状態にあるかどうかを推測するようにしてもよい。
【0021】
そして、ステップS6の処理では、運転者の注視対象物は障害物である可能性が高いが、運転者の運転技量のレベルが低いか又は運転負荷が多い状態であって、自車両前方の障害物に対する注意が不足する可能性があることから、運転者の視野領域外に物体が存在するかどうかを判断する。つまり、運転者は運転技量のレベルが低いときほど、また、運転負荷が高いときほど、視野領域は狭くなり、視野領域外の障害物の存在を見落とす可能性が高くなる。そこで、この実施形態においては、前記ステップS4で検出した、運転者の視野領域外に障害物が存在するか否かに応じて、障害物警報を発するか否かの判断を行う。つまり、運転者の視野領域外に障害物が存在する場合には、運転者の運転負荷が大きいか又は運転技量のレベルが低いと予測される状態であり且つ視野領域外に障害物が存在する状態であって、視野領域外の障害物の存在を見落とす可能性があると予測されることから、ステップS7に移行し、障害物警報装置17を作動させて障害物警報を発する。一方、視野領域外に障害物が存在しない場合には、障害物は、運転者の視野領域内に含まれており、運転者は、自車両前方の障害物を全て認識していると予測されることから、障害物警報の発令は不要としてそのまま処理を終了する。すなわち、障害物警報の発令を行わない。
【0022】
一方、前記ステップS11では、注視点数比率が、そのしきい値Pより大きく、注視対象物に対する注視点数が少ないと判断されるときには、運転者の運転技量レベルが高いか、又は運転負荷が低い状態であることから、前記ステップS3で抽出した複数の注視対象物の中に、予め設定した「手がかり」情報に対応する注視点対象が含まれているかどうかを判断する。つまり、運転者は、運転技量のレベルが高いときほど、また、運転負荷が低いときほど、進路上の障害物に関する情報取得に加えて、適切な経路を辿るために手がかりとなる情報の取得を行うようになる。つまり、道路白線や、ガードレール、縁石、反射板、数台前までの車両等の情報の取得を行うようになる。そこで、本実施形態では、前記道路白線や、ガードレール、縁石、反射板、数台前までの車両等を特定するための、その特徴等、注視対象物が、前記道路白線や、ガードレール、縁石、反射板や車両等であることを特定することの可能な情報を手がかり情報として予め設定しておき、これを所定の記憶領域に格納しておく。具体的には、前記手がかり情報として、例えば、白線に対しては「150mm程度の幅」とか「白線の両側のエッジ」等が、手がかり情報として設定される。また、縁石に対しては、「自車両左側の高さ200mm程度の段差」とか「路面と異なる色を持つ」等が、手がかり情報として設定される。
【0023】
そして、注視点分布抽出回路12bで検出した注視点分布に基づいて、注視対象物のうち、手がかり情報に該当するものがあるかどうかを検出し、手がかり情報に該当する注視対象物の数を算出する。例えば、図5の場合には、走行車線上の2つの障害物に相当する2つの注視点分布と、道路白線やガードレール等に相当する4つの注視点分布との計6個の注視点分布、すなわち注視対象物があり、そのうち、4つが手がかり情報に該当することから、手がかり情報に該当する注視対象物の数は4個となる。
【0024】
そして、手がかり情報に該当する注視点分布が一つまたは零である場合には、運転者の注視対象物は、手がかりとなり得る物体ではなく、障害物であると判断しステップS6に移行する。そして、視野領域外に障害物が存在する場合には、障害物警報を発する。
一方、手がかり情報に該当する注視対象物が少なくとも2つ以上含まれている場合には、運転者は手がかり情報を取得していることから、注視対象物は手がかりとなり得る物体であると予測し、前記ステップS4で算出した運転者の視野領域が広いかどうかを判定する。すなわち、運転技量レベルが高い運転者であっても、また、運転負荷が低い場合であっても、視野領域が狭くなるときがある。このような場合には、手がかり情報を、すなわち最適経路の情報を積極的に与えることによって、自車両が進むべき経路が明確になり、安定した運転を達成することができる。そこで、この実施形態では、運転者の視野領域が狭くなっているときには、ステップS13に移行し、経路情報の提示を行う。
【0025】
前記視野領域が狭くなっているかどうかの判断は次の手順で行う。まず、前記ステップS1で算出した、操舵場面に相当する道路を過去に走行した場合の視野領域を、走行履歴情報として予め収集しておく。そして、走行履歴情報に基づいて、前記操舵場面に相当する道路を過去に走行したときの視野領域の平均値を算出し、この平均値と、今回の視野領域とを比較することで判断する。つまり、今回の視野領域が、過去の視野領域の平均値よりも小さいときには、視野領域が狭くなっていると判断する。
【0026】
そして、視野領域が狭くなっていると判断されるときには、ステップS13に移行し、視野領域が狭くなっており、経路提示が必要と判断し、経路提示装置16による情報提示を行う。例えば図7に示すように、ナビゲーション装置13の表示装置13aにおいて、通常の自車両基準の周辺の道路地図に代えて、曲路において、自車両の最適経路を明示した画像を表示したり、あるいは、ヘッドアップディスプレイによって、車両前方の風景に最適経路を重ね合わせて表示したりする。
一方、視野領域が狭くなっていない場合には、運転者は、自車両の最適経路を十分把握しており経路提示は不要と判定し、情報提示は行わずそのまま処理を終了する。
【0027】
次に、上記第1の実施の形態の動作を説明する。
視線検出装置11では、所定周期で、運転者の視線方向を検出し、注視対象判定装置12では、運転者の視線方向と前方カメラ12aの撮像画像とを重ね合わせて、運転者の注視点分布を検出する。また、操舵場面判定装置14では、ナビゲーション装置13からの道路地図情報に基づいて操舵を行う状況にあるかどうかを判断する。
【0028】
そして、このとき、運転者が操舵を行う状況にあり、運転者の視線が向けられた注視対象物に対する注視点数が多い場合には(ステップS1〜ステップS4)、運転者の運転技量レベルが低いか、又は運転負荷が高い状態であると予測されることから、運転者の注視対象物は障害物であると予測し、ステップS5からステップS6に移行し、運転者の視野対象領域外に障害物が存在するかどうかを判断する。そして、視野領域外に障害物が存在しない場合には、障害物警報は発令されない。
【0029】
したがって、運転者が自車両前方の注視対象物、すなわち障害物等を認識しているにも関わらず、障害物警報を発することによって運転者に煩わしさ感を与えることを回避することができる。また、運転者の運転技量のレベルが低い場合や、運転者の運転負荷が高い状態である場合には、障害物警報を発することによって、場合によっては、かえって自車両前方の障害物に対する注意力を削ぐ可能性も考えられるが、上述のように、運転者の視野領域内に注視対象物が存在し、運転者がこの注視対象物を十分認識しているとみなすことの可能な場合には、障害物警報を発しないから、不要な障害物警報を発することによって運転者に悪影響を及ぼすことを回避することができる。このとき、操舵場面であるにも関わらず、経路表示が行われないことになるが、この場合、運転者の運転技量のレベルが低いか、又は運転者の運転負荷が高い状態であって、運転者には、滑らかな経路選択や楽な操舵を実現するために適した経路を探す余裕はないと予測されることから、経路表示を行わなくとも何ら問題はなく、自車両前方の障害物を注視している状態で、不要な経路表示を行うことによってかえって運転者の障害物に対する注意を削ぐことを回避することができる。
【0030】
逆に、運転者の視野対象領域外に障害物が存在する場合には、ステップS6からステップS7に移行して障害物警報が発令される。したがって、運転者の運転技量レベルが低い場合や、運転者の運転負荷が高い状態である場合には、障害物を見落とす可能性が高くなるが、このように運転者の視野領域外に障害物があるとき、すなわち運転者が認識していない障害物が存在するときには、障害物警報を発するから、障害物の存在を、運転者に確実に認識させることができる。
【0031】
一方、例えば、運転者の運転技量レベルが比較的高いとき、あるいは運転者の運転負荷が比較的低い状態である場合には、運転者は、注視対象物の存在を確実に認識し、この注視対象物に対して視線を向ける回数も比較的少なくなることから、注視対象物に対する注視点数が少なくなる。
このため、全ての注視対象物に対する注視点数の比率がそのしきい値Pより大きくなると、ステップS5からステップS11に移行し、このとき、運転者が、道路白線や、ガードレールあるいは縁石等といった曲路を走行するための手がかりの情報を取得している場合にはステップS12に移行し、さらに、このときの運転者の視野領域が以前通行したときよりも狭いと予測されるときには、ステップS13に移行して、自車両の最適経路を明示した表示を行う経路情報提示が行われる。
【0032】
つまり、運転者が、道路白線や、ガードレールあるいは縁石等といった曲路を走行するための手がかりの情報を取得しており、運転者が安全確認のために障害物を経路上に探しているわけではなく、滑らかな経路選択や楽な操舵を実現するために適した経路を探していると予測されるときには、自車両の最適経路を表示する経路情報提示が行われる。このため、運転者は、表示された経路情報を参照することによって、自車両が進むべき最適経路を明確に認識することができ、運転者はより安定した運転行動を行うことができる。
【0033】
このとき、障害物が存在する場合であっても、障害物警報は発せられないが、このように、障害物警報よりも経路情報の提示を希望している状態は、運転者が障害物を十分認識している状態であるか、あるいは、それほど注意を払う必要のない障害物であるとみなすことができるから、障害物警報が発令されなくても問題はなく、障害物警報を発することによって却って運転者に対して煩わしさ感を与えることを回避することができる。
【0034】
一方、運転者の視野領域が以前と同等あるいはそれよりも広い場合には、曲路を走行するにあたって以前この操舵場面に相当する地点を走行した場合と同等の視野領域であって、滑らかな経路選択や楽な操舵操作を実現するために適した経路を十分認識していると予測されることから、経路表示を行う必要はないと予測し、そのまま処理を終了して経路表示は行われない。
したがって、運転者が、比較的運転負荷が低いときあるいは運転技量のレベルが高く、前方の操舵場面を走行するにあたってその経路を十分認識しており、経路表示を必要としていない状態で、不要な経路情報の表示が行われることによって、かえって、運転者に煩わしさ感を与えることを回避することができる。
【0035】
このように、上記第1の実施の形態においては、運転支援装置において、操舵を行う状況であるときに、運転者が、安全確認のために障害物を経路上に探している状態であるのか、あるいは、滑らかな経路選択や楽な操舵を実現するために適した経路を探しているのかを判定し、経路を探している場合には経路表示のみを行うようにし、障害物を探しているときには、認識していない障害物があるときにのみ障害物警報を発するようにしたから、運転者が操舵を行う場面において、望んでいる情報に合致する情報を提供することができると共に、煩わしさ感を与えることなく実現することができる。
【0036】
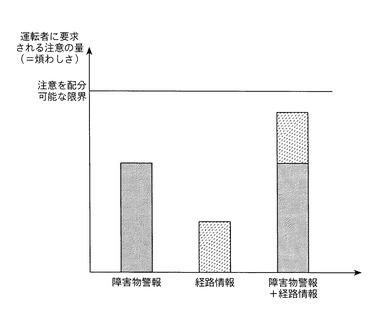
特に、運転者は、障害物警報が発令された場合には、障害物に対して注意を払うようになり、また、経路表示が行われた場合には、経路表示に対して注意を払うようになる。これら障害物警報の発令と経路表示との何れか一方のみが行われる場合には、図8に示すように、障害物警報の発令又は経路表示に対して、運転者が払う注意量は、運転者の許容範囲内に収まるが、障害物警報の発令と経路表示とが共に行われた場合には、その総和分相当の注意を払う必要があり、運転技量のレベルが低い運転者、あるいは運転負荷が比較的高い状態である場合等には、場合によっては、障害物警報及び経路表示に対して運転者が払う注意量の総和が、運転者の許容範囲を越えてしまい、障害物警報及び経路表示に対して運転者が十分な注意を払うことができず、障害物に対する注意量が少なくなったり、あるいは、経路表示に対する注意量が少なくなったりする場合があり、情報提供や経路表示を行うことによって、運転支援を行っても十分な注意が払われなかったり有効に活用されなかったりする場合がある。
【0037】
しかしながら、上述のように、障害物警報及び経路表示のうちの何れか一方のみを情報提示するから、運転者は障害物警報及び経路表示の何れに対しても十分注意を払うことができ、有効な運転支援を行うことができる。
また、注視点分布を抽出する際には、前方カメラ12aで撮像した自車両前方の撮像画像と、運転者の視線方向とから、一般的な運転者の視線配分行動に則した方法に基づいて注視対象物を判定しているから、運転者の運転技量レベルや運転者に課された運転負荷に応じて変化する注視行動を適切に捉えることができる。
【0038】
また、このとき、運転者の注視対象物に対する視線の配り方や、視野領域等を考慮して、運転者が障害物警報を望んでいる状態にあるか、あるいは経路表示を望んでいる状態にあるかを判断すると共に、これら情報を提供するかどうかを判断するようにしたから、運転者の運転技量のレベルや運転者の運転負荷に応じて、その時々で適した判定を行うことができ、より的確に情報提供を行うことができると共に、煩わしさ感を与えることなく、効果的に運転支援を行うことができる。
【0039】
また、運転者の視線行動に基づいて運転者の注視対象物を判別するようにしているから、運転者の注視対象物を容易且つ的確に検出することができる。
また、ナビゲーション装置13で保持する自車両周辺の道路地図情報に基づいて前方に曲路が存在するかどうかを判断するようにしているから、操舵を行う状況にあるかどうかを容易且つ的確に判断することができる。
【0040】
なお、上記第1の実施の形態において、経路提示装置16及び障害物警報装置17が運転支援手段に対応し、経路提示装置16が経路情報提供手段に対応し、障害物警報装置17が障害物情報提供手段に対応している。また、図4のステップS1の処理が操舵場面検出手段に対応し、ステップS2からステップS5及びステップS11の処理が注視対象判別手段に対応し、ステップS6及びステップS12の処理が提供情報決定手段に対応している。
【0041】
また、図4のステップS2の処理が視線方向検出手段に対応し、前方カメラ12aが前方撮像手段に対応し、ステップS3で抽出物体を抽出する処理が物体抽出手段に対応し、ステップS5の処理が注視比率検出手段に対応し、ステップS11の処理が手がかり該当数検出手段に対応している。
また、図4のステップS5で、運転者の視線が向けられた抽出物体の撮像画像上での占有面積を検出する処理が占有面積検出手段に対応し、注視点の数を計測する処理が注視点数計測手段に対応している。
また、図4のステップS4の処理が視野領域推測手段に対応し、ステップS6の処理が視野領域外障害物検出手段に対応している。
【0042】
次に、本発明の第2の実施の形態を説明する。
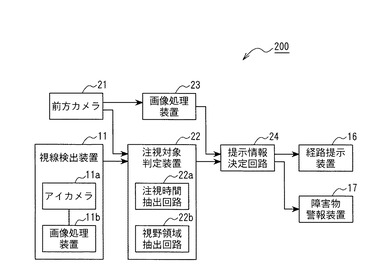
図9は、第2の実施の形態における、運転支援装置200の機能構成図である。
この第2の実施の形態における運転支援装置200は、図9に示すように、上記第1の実施の形態で用いた視線検出装置11と、自車両前方の道路を撮像する前方カメラ21と、この前方カメラ21の撮像画像及び視線検出装置11の検出結果に基づいて、運転者が注視している注視対象物の有無や位置、また、運転者の視野領域等を検出する注視対象判定装置22と、前記前方カメラ21の撮像画像に対して画像処理を行い、自車両前方の道路線形形状を検出する画像処理装置23と、前記注視対象判定装置22の判定結果及び画像処理装置23での処理結果に基づいて警報情報の報知及び経路情報の表示の何れを行うかを判断する提示情報決定回路24と、上記第1の実施の形態で用いた経路提示装置16及び障害物警報装置17を備えている。
【0043】
この第2の実施の形態における注視対象判定装置22は、前記前方カメラ21の撮像画像において、上記第1の実施の形態と同様にして走行路上の物体を抽出物体として検出すると共に、視線検出装置11で検出された視線方向と前記前方カメラ21で検出された撮像画像とを重ね合わせて、前記抽出物体に対して運転者の視線が注視物体、すなわち、注視対象物に配られた時間である注視時間を抽出する注視時間抽出回路22aと、上記第1の実施の形態における視野領域抽出回路12cと同等の視野領域抽出回路22bとを備えている。
【0044】
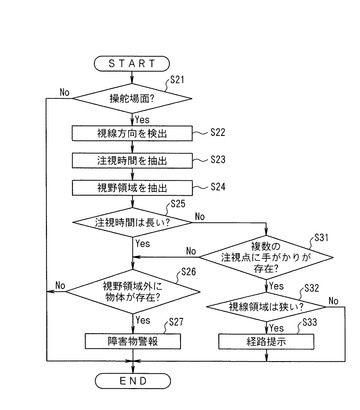
図10は、運転支援装置200の動作を表すフローチャートである。
前方カメラ21では、予め設定した周期で自車両前方の道路を撮像する。画像処理装置23では、前方カメラ21の撮像画像に対して画像処理を行い、自車両前方の道路形状を検出する。例えば、公知の手順でエッジ抽出処理を行って道路白線を検出し、その道路白線の形状から道路形状を検出する。そして、道路形状から運転者が操舵を行う必要のある状況になるかどうか、すなわち、自車両前方に曲路が存在するかどうかを予測し(ステップS21)、操舵を行う必要のある状況になると予測されない場合には、そのまま処理を終了するが、操舵を行う必要のある状況になると予測されるときには、ステップS22に移行する。
【0045】
このステップS22では、上記第1の実施の形態におけるステップS2の処理と同様の手順で、視線検出装置11において運転者の視線方向を検出し、次いで、ステップS23に移行し、注視時間抽出回路22aで、走行路上の抽出物体を検出すると共に、この抽出物体に対する運転者の注視時間を算出する。ここで、通常、人は対象物を認識する場合、対象物上に視線を動かすことで認識する。この結果として、対象物上には、運転者が対象を認識するまでの過程において視線が滞留する点である注視点が、一定の時間、対象物上に配られることになる。そこで、本実施形態では、前記前方カメラ21の撮像画像に対し、視線検出装置11で検出した、所定時間における運転者の視線方向を重ね合わせることで、車両前方の風景に含まれる少なくとも一つ以上の対象物に注がれた運転者の視線において、個々の対象物に配られた注視点の滞留時間を抽出し、これを注視時間として抽出する。
【0046】
次いで、ステップS24に移行し、視野領域抽出回路22bにおいて上記第1の実施の形態における視野領域抽出回路12cと同様の手順で運転者の視野領域を抽出した後、ステップS25に移行し、ステップS23で検出した、個々の注視対象物に対する運転者の注視時間が長いかどうかを判断する。すなわち、通常、運転者が対象物を認識するとき、運転者の運転技量のレベルが高いときほど注視時間は短くなり、また、運転者に与えられる運転負荷が低いときほど注視時間は短くなる傾向にある。そこで、この実施の形態においては、前方カメラ21の撮像画像における個々の注視対象物の占有面積と、この注視対象物に対する注視時間とに基づいて注視時間比率(=占有面積/注視時間)を算出し、この注視時間比率が予め設定したしきい値Qよりも小さいときには、注視対象物に対する注視時間は長と判断する。そして、個々の注視対象物についてその注視時間比率を算出し、何れか一つでもその注視時間比率がしきい値Qよりも小さいときには、注視対象物に対する注視時間が長く、すなわち、運転者の運転技量のレベルが低いか、又は運転者の運転負荷が高い状態にあると予測されることから、運転者の注視対象物は、障害物である可能性が高いとしてステップS26に移行する。
【0047】
なお、ここでは、各注視対象物に対する注視時間比率のうち、何れか一つでもその注視時間比率がしきい値Qよりも小さいときに、運転者の運転技量のレベルが低い、あるいは運転者の運転負荷が高い状態にあり注視対象物は障害物である可能性が高いとしてステップS26に移行するようにしたが、これに限るものではなく、例えば、複数の注視対象物に対する注視時間比率の平均値等、注視時間比率の分布状況から、運転者の運転技量のレベルが低いか、あるいは運転負荷が高い状態にあるかどうかを推測するようにしてもよい。
【0048】
そして、ステップS26の処理では、上記第1の実施の形態における図4のステップS7の処理と同様の手順で、前方カメラ21の撮像画像において運転者の視野領域の外に、障害物が存在するかどうかを判断し、障害物が存在する場合には、ステップS27に移行し、障害物警報装置17を作動し、運転者の視野領域外に存在する障害物に関する障害物警報を発する。
【0049】
つまり、注視対象物に対する注視時間が比較的長く、運転者の運転技量のレベルが低いか、又は運転者の運転負荷が高い状態であると予測される状態にある状態で、運転者の視野領域外に障害物が存在する場合には、運転者は障害物に気がつかない可能性があると予測し、障害物警報を発する。このとき、操舵場面ではあるにも関わらず、経路表示は行われないが、前述のように、運転者は、その運転技量レベルが低いかあるいはその運転負荷が高い状態であって、運転者は、滑らかな経路選択や楽な操舵を実現するための経路選択を行うといった行動をとることはないと予測されることから、経路表示が行われなくとも何ら問題はなく、障害物警報の発令と共に経路表示を行うことによって、かえって運転者の注意が分散することを回避することができる。
【0050】
逆に、運転者の視野領域の外に、障害物が存在しない(ステップS26)ときには、そのまま処理を終了し、障害物情報は発令しない。つまり、運転者の視野領域の外に障害物は存在しないことから、運転者は自車両前方の障害物を全て認識しているとみなすことができる。したがって、運転者が障害物を認識しているにも関わらず警報を発生させることによって、かえって運転者に煩わしさ感を与えたり、既に認識している障害物からの注意を却ってそらせてしまったりすることを回避することができる。
一方、前記ステップS25の処理で、全ての注視対象物に対する注視時間がしきい値Q以上であると判断されるときには、注視対象物に対する注視時間は短い、すなわち、運転者の運転技量のレベルが高いか、又は運転者の運転負荷が低い状態にあると判断し、ステップS31に移行する。
【0051】
このステップS31では、提示情報決定回路24において、前記ステップS21で抽出した運転者の注視対象物の中に、前記手がかり情報に該当する注視対象物が存在するかどうかを判断する。この判断は上記第1の実施の形態と同様であって、予め手がかり情報を保持しておき、これに基づいて判断する。そして、手がかり情報に該当する注視対象物が存在する場合には該当する注視対象物の数を計数し、所定時間における視線検出の結果、少なくとも2つ以上の注視対象物が手がかり情報に該当するとき、運転者の注視対象物は手がかりとなり得る物体であると判断し、ステップS32に移行する。そして、上記第1の実施の形態における図4のステップS12の処理と同様の手順で、過去にこの操舵場面に該当する道路を走行したときの視野領域の平均値等に基づいて、現在の運転者の視野領域が狭くなっているかどうかを判断し、視野領域が狭くなっていると予測されるときにはステップS33に移行し、経路提示装置16を作動して、運転者に対して経路表示を行う。
【0052】
したがって、注視対象物に対する注視時間が比較的短く、運転者の運転技量のレベルが比較的高いと判定されるか、又は運転者の運転負荷が小さいとみなすことの可能な状態で、操舵場面において運転者が複数の手がかり情報に該当する対象物を注視しているときには、運転者は、安全確認のために経路上の障害物を探すよりも、滑らかな経路の選択や楽な操舵を実現するために適した経路を探している状況であると予測されることから、経路表示が行われることによって、運転者は進むべき最適経路が明確となり、安定した運転が達成されることになる。このとき、障害物警報は発令されないが、このとき、運転者は、運転技量のレベルが高いか運転負荷が低い状態であり、且つ障害物よりも手がかり情報を取得していることから、運転者は障害物を十分認識しているとみなすことが可能な状態であるため、警報が発生されなくても問題はなく、却って、運転者が障害物を十分に認識して手がかり情報の獲得を行っているときに障害物警報が発せられることによって運転者に違和感を与えることを回避することができる。
【0053】
したがって、この第2の実施の形態も上記第1の実施の形態と同等の作用効果を得ることができると共に、この第2の実施の形態においては、注視対象物に対する運転者の注視時間を検出しこれに基づいて情報提示の判断を行うようにしているから、上記第1の実施の形態のように、注視点分布に基づいて情報提示の判断を行う場合に比較してより簡便に行うことができる。また、前方カメラ21の撮像画像に基づいて前方の道路形状を検出するようにしているから、ナビゲーション装置を設けることなく実現することでき、その分、構成品点数を低減することができるから、より安価に実現することができる。
【0054】
なお、上記第2の実施の形態において、経路提示装置16及び障害物警報装置17が運転支援手段に対応し、経路提示装置16が経路情報提供手段に対応し、障害物警報装置17が障害物情報提供手段に対応している。
また、図10のステップS21の処理が操舵場面検出手段に対応し、ステップS22〜S25及びステップS31の処理が注視対象判別手段に対応し、ステップS26及びステップS32の処理が提供情報決定手段に対応している。
【0055】
また、ステップS22の処理が視線方向検出手段に対応し、前方カメラ21が前方撮像手段に対応し、ステップS23で抽出物体を検出する処理が物体抽出手段に対応し、ステップS25の処理が注視比率検出手段に対応し、ステップS31の処理が手がかり該当数検出手段に対応している。
また、図10のステップS25の処理で、運転者の視線が向けられた抽出物体の撮像画像上での占有面積を検出する処理が占有面積検出手段に対応し、ステップS23で抽出物体に対する注視時間を計測する処理が注視時間計測手段に対応し、ステップS24の処理が視野領域推測手段に対応し、ステップS26の処理が視野領域外障害物検出手段に対応している。
【0056】
また、前記カメラ21が走行路形状撮像手段に対応し、画像処理装置23が走行路形状検出手段に対応している。
なお、上記各実施の形態においては、運転者が操舵を行う必要のある状況にないときには、そのまま処理を終了し、障害物警報を発しないようにしているが、これに限るものではなく、運転者が操舵を行う必要のある状況にないときには、障害物の有無に応じて、障害物警報装置のみを作動させるようにしてもよい。
【0057】
また、上記各実施の形態においては、経路表示装置及び障害物警報装置の何れか一方を選択し何れか一方のみにより情報提示を行う場合について説明したが、経路表示装置及び障害物警報装置に限るものではなく、例えば、運転者に駐車を行うための手続を指示する類の駐車支援装置と後方や側方の障害物の存在を報知する後側方警報装置、カーブへの進入速度が超過している際に報知するカーブ進入速度警報装置と車線の逸脱を報知する車線逸脱警報装置等、他の情報提示を行う運転支援装置どうしの組み合わせであっても適用することができる。また、2つの運転支援どうしに限るものではなく、3以上の運転支援装置の中から作動させる運転支援装置を1つ選択するようにしてもよい。
【図面の簡単な説明】
【0058】
【図1】本発明の運転支援装置の機能構成を示すブロック図である。
【図2】図1の、より詳細な機能構成を示す機能ブロック図である。
【図3】視線検出装置の説明に供する図である。
【図4】運転支援装置の動作の一例を示すフローチャートである。
【図5】注視点分布を説明するための説明図である。
【図6】視野領域を説明するための説明図である。
【図7】経路提示装置による提示内容の一例である。
【図8】運転者に要求される注意量を説明するための説明図である。
【図9】第2の実施の形態における機能ブロック図である。
【図10】第2の実施の形態における運転支援装置の動作の一例を示すフローチャートである。
【符号の説明】
【0059】
11 視線検出装置
11a アイカメラ
11b 画像処理装置
12 注視対象判定装置
12a 前方カメラ
12b 注視点分布抽出回路
12c 視野領域抽出回路
13 ナビゲーション装置
14 操舵場面判定装置
15 提示情報決定回路
16 経路提示装置
17 障害物警報装置
21 前方カメラ
22 注視対象判定装置
22a 注視時間抽出回路
22b 視野領域抽出回路
23 画像処理装置
24 提示情報決定回路
【技術分野】
【0001】
本発明は、自車両前方の障害物の存在を通知する障害物報知支援や、曲路等で自車両の最適な走行経路を表示する経路表示支援等、複数の支援を実行することの可能な運転支援装置において、現時点で運転者が必要としている支援情報のみを情報提供するようにした運転支援装置及び運転支援方法に関する。
【背景技術】
【0002】
従来、運転支援装置として、自車両が障害物に接近していることを運転者に報知する、いわゆる障害物接近警報装置が知られている。この障害物接近警報装置を車両に搭載する際の課題として、警報が頻繁に発生することにより、運転者に煩わしさ感を与えるという問題がある。つまり、障害物警報では、障害物の検出精度が高まり、運転者への報知の頻度が増えるほど、運転者にとって頻繁な報知による煩わしさ感が増えるという、矛盾要素を持っている。このため、この矛盾を解決するための技術の開発が押し進められている。例えば、基本的には、運転者が一度障害物に視線を配ったならば、運転者はその障害物を認識したと判定し、以後、この障害物に対する障害物警報を行わないように警報制御を行うようにしたものが提案されている(例えば、特許文献1参照)。このような警報制御を行うことによって、頻繁な警報の発令を低減し、運転者にとっても煩わしさ感を低減することができる。
【特許文献1】特開2004−210213号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、運転者に情報を提供する運転支援装置としては、障害物接近警報装置だけでなく、曲路等で自車両の最適経路を情報提示するようにした経路情報提示装置等といった数々の支援装置が提案されているが、これら複数の運転支援装置を提供するにあたっては、個々の運転支援装置のみならず、車両に搭載された全ての運転支援装置の関係性を考慮した上で、運転支援を行う必要がある。すなわち、元来、警報等を発する運転支援装置は、運転者の注意を引きつけるものである。たとえ、障害物警報の警報提示を運転者の認知情報に合致する形で行ったとしても、同時に他の運転支援装置から不用意な情報提供が行われた場合には、運転者は、他の運転支援装置に対する煩わしさ感を意識するほか、複数の運転支援装置の集合体である、「運転支援システム」に対する注意が要求され、運転者の煩わしさ感は増加する。また、状況によっては、運転者が配分することの可能な注意量の総量を越えてしまうことも考えられる。
【0004】
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、種類の異なる複数の運転支援を行うにあたり、同時に複数の運転支援情報が提示されることにより、かえって運転者に対して煩わしさ感を与えることを回避することの可能な運転支援装置及び運転支援方法を提供することを目的としている。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明に係る運転支援装置は、支援内容の異なる運転支援情報を提供する複数の運転支援手段を備えた運転支援装置において、注視対象判別手段によって、運転者の注視対象物を検出すると共にその種別を判別し、判別した注視対象物の種別に基づいて、運転者が現在必要としている運転支援情報を推測する。そして、複数の運転支援手段のうち、運転者が必要としている運転支援情報を提供する運転支援手段のみを作動させる。
【発明の効果】
【0006】
本発明に係る運転支援装置によれば、運転者の注視対象物の種別に基づいて、運転者が現在必要としている運転支援情報を推測し、この推測した、運転者が必要としている運転支援情報を提要する運転支援手段のみを作動させるようにしたから、運転者が必要としている運転支援情報については確実に提供しつつ、複数の運転支援が行われることにより運転者に煩わしさ感を与えることを回避することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態を説明する。
まず、第1の実施の形態を説明する。
図1は、本発明における運転支援装置100の機能構成を示すブロック図である。
図中1は、運転者の視線方向を検出するための視線検出手段、2は、視線検出手段で検出した視線方向から運転者が注視している注視対象物に対する運転者の視線行動から、運転者の注視対象物が何かを判定する注視対象判定手段、3は、運転者が操舵を行う必要のある運転状態にあるかどうかを判定する操舵場面判定手段、4は、提示情報決定手段であって、注視対象判定手段の検出結果及び操舵場面判定手段の判定結果に基づいて、曲路等で自車両の最適経路を提示するための経路提示手段5及び自車両前方の障害物の存在を運転者に報知するための障害物報知手段6のうちのいずれによる情報提示を行うかを判断する。
【0008】
図2は、運転支援装置100のより具体的な機能構成を示す機能ブロック図である。
図中11は、視線検出装置であって、この視線検出装置11は、図3に示すように、運転者の眼球等を撮像するための一対のアイカメラ11aと、このアイカメラ11aの撮像画像から、公知の手順で運転者の視線方向を検出するための画像処理装置11bとを備えている。なお、図3中の41はステアリングホイールである。この視線検出装置11で検出された運転者の視線方向は、注視対象判定装置12に入力される。
【0009】
この注視対象判定装置12は、自車両前方の走行路を撮像するための前方カメラ12a、前方カメラ12aの撮像画像と視線検出装置11で検出した視線方向とを重ね合わせ、撮像画像上において走行経路上の障害物や、道路白線、ガードレール等といった走行路上の物体(以後、抽出物体ともいう。)を抽出すると共に、運転者の視線が滞留する地点を注視点として検出し、前記抽出物体に対する注視点の分布状況を検出する注視点分布抽出回路12b、及び視線検出装置11で検出した運転者の視線方向から運転者の上下方向及び左右方向の視線の移動範囲を求め、運転者の視野領域を抽出する視野領域抽出回路12c、を備えている。
【0010】
また、車両には、ナビゲーション装置13が搭載され、このナビゲーション装置13は、マップマッチング法、或いは、GPS等の自車両の現在位置を検出する自車位置検出手段と道路地図情報とを備え、自車位置検出手段で検出した自車両周辺の道路地図情報を、その表示装置13aに表示すると共に、自車両の現在位置及び自車両の現在位置周辺の道路地図情報を、操舵場面判定装置14に出力する。この操舵場面判定装置14は、自車両の道路地図情報に基づいて自車両前方にカーブや右折地点、左折地点等の曲路が存在し、自車両が操舵を行う必要のある状況にあるかどうかを判断する。
【0011】
この操舵場面判定装置14の判定結果及び注視対象判定装置12の判定結果は、提示情報決定回路15に入力され、提示情報決定回路15は、前記操舵場面判定装置14からの操舵を行う必要のある状況にあるかどうかや、運転者の運転技量レベルや運転者の運転負荷等の点から、障害物警報を発するか経路表示を行うかを判断し、その結果に応じて経路提示装置16又は障害物警報装置17の何れか一方のみを作動する。
【0012】
前記経路提示装置16は、曲路において、この曲路を走行するにあたって、安定した車両挙動での走行を可能とするための最適な走行経路を運転者に明示する。例えば、前記ナビゲーション装置13の表示装置13aにおいて、自車両周辺の道路地図情報に代えて、曲路における自車両の最適経路を拡大表示したり、あるいは、ヘッドアップディスプレイ(HUD)を用い、自車両が進むべき最適経路を前方の風景と直接的に重ね合わせたりすることにより、経路表示を行う。
【0013】
前記自車両の最適経路は、例えば、ナビゲーション装置13からの道路地図情報に曲路の旋回半径等の曲路の形状を表す曲路情報を含めておき、このナビゲーション装置13からの道路地図情報から獲得した曲路情報と、自車両の走行速度、自車両の操舵角度等に基づいて、公知の手順で、自車両が安定した車両挙動で走行することの可能な理想的な経路を推測し、これを最適経路として表示すればよい。
また、前記障害物警報装置17は、前記提示情報決定回路15で、障害物警報の発令が必要と判断されたとき障害物警報を発する。
【0014】
次に、運転支援装置100の動作を、図4のフローチャートに基づいて説明する。
ナビゲーション装置13では、自車両の現在位置を検出すると共に自車両の現在位置周辺の道路地図情報を抽出し、表示装置13aに道路地図情報を表示して運転者に自車両の現在位置を認識させると共に、自車両の現在位置及び自車両周辺の道路地図情報を操舵場面判定装置14に出力する。操舵場面判定装置14では、道路地図情報をもとに、自車両前方に、曲路が存在し、操舵を行う必要のある状況どうかを判断する(ステップS1)。そして、操舵を行う必要のない状況であるときには、略直進走行をしている状態であることから、経路表示を行う必要はない。また、略直進走行を行っており、運転者は障害物のみに注意を払えばよい状況にあるため、障害物警報の発令は不要と判断し、そのまま処理を終了する。
【0015】
一方、視線検出装置11では、アイカメラ11aで運転者の眼球を撮像すること等により、撮像画像から運転者の視線方向を検出する(ステップS2)
続いて、注視対象判定装置12では、運転者の注視点の分布である、注視点分布を抽出する(ステップS3)。通常、人は物体を認識する場合、この認識対象である対象物上に視線を動かすことで認識する。この結果として、対象物上には、運転者が対象を認識するまでの過程において視線が滞留する点である注視点が分布することになる。そこで、前方カメラ12aによって自車両前方の道路を撮像し、公知の手順で画像処理を行って自車両前方の障害物や道路白線、ガードレール或いは縁石等といった走行路上の物体を抽出物体として検出すると共に、車両前方の風景からなる撮像画像と、ステップS2で算出した、所定時間当たりの運転者の視線方向とを重ね合わせることで、検出された走行路上の抽出物体のうち、運転者の視線が注がれた抽出物体を検出してこれを注視対象物とし、自車両前方の少なくとも一つ以上の注視対象物に注がれた運転者の視線において、個々の注視対象物に注がれた注視点の分布を注視点分布とし、これを注視点分布注視回路12bにおいて抽出する。例えば、図5に示すように、所定時間の間での前方風景における運転者の視線方向の変化状況から、視線が滞留する地点を注視点として検出する。そして、その注視点と重なる抽出物体を注視対象物として認識し、さらに各注視対象物に対する注視点の分布を検出する。
【0016】
例えば、図5に示すように、自車両の走行路上に障害物が存在する場合には、運転者は視線を移動させて障害物を認識することから注視点は障害物上に現れることになり、また、曲路を走行する場合等には、運転者はガードレールの位置や道路白線等を認識することで、走行車線における自車両の位置を認識し、滑らかに走行可能な経路や、楽な操舵で走行できる経路を選んでカーブを走行することから、ガードレールや道路白線に注視点が現れることになる。
なお、前記抽出物体は、例えば、撮像画像における輝度の変化状況等に基づいて公知の手順で検出すればよい。
【0017】
このようにして、注視点の分布を検出したならば、ステップS4に移行し、次に、注視対象判定装置12において、運転者の視界の広さである視野領域を抽出する。すなわち、通常、人は環境を認識するとき、視界全体に視線を動かすが、この視界の範囲は、運転技量や、運転負荷等によっても変化する。そこで、本実施形態においては、注視対象判定装置12の視野領域抽出回路12cにおいて、前記ステップS2で、視線検出装置11において検出した所定時間における運転者の視線方向をもとに、図6に示すように、運転者の上下方向の視線角度(図6(a))及び左右方向の角度(図6(b))を抽出し、視線角度の最大値及び最小値から求まる上下方向の視野領域と、左右方向の左端角度及び右端角度から求まる左右方向の視野領域を抽出する。
【0018】
前記ステップS5では、前記ステップS3で、注視対象判定装置12において算出した、自車両前方の個々の注視対象物に対する運転者の注視点分布において、注視点の点数が多いか少ないかを判定する。つまり、通常、運転者が対象物を認識するとき、運転者の運転技量のレベルが高いときほど、また、運転者に与えられた運転負荷が低いときほど、この対象物に対する注視点の点数は少なくなる傾向にある。そこで、本実施形態においては、前方カメラ12aで撮像した前方画像における、個々の注視対象物の占有面積と、その注視対象物における注視点の点数をもとに、注視点数比率(=占有面積/注視点の点数)を算出し、この注視点数比率が予め設定した注視点数比率のしきい値P以下であるときには、その注視対象物に対する注視点数は多いと判定する。そして、各注視対象物に対する注視点数比率のうち、しきい値P以下のものが一つ以上ある場合には、運転者の運転技量のレベルが低いかあるいは運転負荷が高い状態であると予測できることから、運転者の注視対象物は、障害物である可能性が高いと判断し、ステップS6に移行する。
【0019】
一方、注視対象物に対する注視点数比率が、前記注視点数比率のしきい値Pより大きいときには、その注視対象物に対する注視点数は少ないと判定する。そして、全ての注視対象物に対する注視点数比率が、前記注視点数比率のしきい値Pより大きいときには、この運転者の運転技量のレベルが高いか又は運転負荷が低い状態であると判定し、ステップS11に移行する。
【0020】
なお、前記占有面積は、前記ステップS3で抽出した抽出物体について、撮像画像における占有面積を推測すればよい。
なお、ここでは、個々の注視対象物に対する注視点数から注視点数比率を算出し、何れかの注視対象物の注視点数比率がそのしきい値P以下であるときに、運転者の運転技量のレベルが低いか、運転負荷が大きく、運転者の注視対象物は障害物である可能性が高いと判断するようにしているが、これに限るものではなく、例えば、複数の注視対象物に対する注視点数比率の平均値等、注視対象物に対する注視点数の分布状況から、運転者の運転技量のレベルが低いか、あるいは運転負荷が高い状態にあるかどうかを推測するようにしてもよい。
【0021】
そして、ステップS6の処理では、運転者の注視対象物は障害物である可能性が高いが、運転者の運転技量のレベルが低いか又は運転負荷が多い状態であって、自車両前方の障害物に対する注意が不足する可能性があることから、運転者の視野領域外に物体が存在するかどうかを判断する。つまり、運転者は運転技量のレベルが低いときほど、また、運転負荷が高いときほど、視野領域は狭くなり、視野領域外の障害物の存在を見落とす可能性が高くなる。そこで、この実施形態においては、前記ステップS4で検出した、運転者の視野領域外に障害物が存在するか否かに応じて、障害物警報を発するか否かの判断を行う。つまり、運転者の視野領域外に障害物が存在する場合には、運転者の運転負荷が大きいか又は運転技量のレベルが低いと予測される状態であり且つ視野領域外に障害物が存在する状態であって、視野領域外の障害物の存在を見落とす可能性があると予測されることから、ステップS7に移行し、障害物警報装置17を作動させて障害物警報を発する。一方、視野領域外に障害物が存在しない場合には、障害物は、運転者の視野領域内に含まれており、運転者は、自車両前方の障害物を全て認識していると予測されることから、障害物警報の発令は不要としてそのまま処理を終了する。すなわち、障害物警報の発令を行わない。
【0022】
一方、前記ステップS11では、注視点数比率が、そのしきい値Pより大きく、注視対象物に対する注視点数が少ないと判断されるときには、運転者の運転技量レベルが高いか、又は運転負荷が低い状態であることから、前記ステップS3で抽出した複数の注視対象物の中に、予め設定した「手がかり」情報に対応する注視点対象が含まれているかどうかを判断する。つまり、運転者は、運転技量のレベルが高いときほど、また、運転負荷が低いときほど、進路上の障害物に関する情報取得に加えて、適切な経路を辿るために手がかりとなる情報の取得を行うようになる。つまり、道路白線や、ガードレール、縁石、反射板、数台前までの車両等の情報の取得を行うようになる。そこで、本実施形態では、前記道路白線や、ガードレール、縁石、反射板、数台前までの車両等を特定するための、その特徴等、注視対象物が、前記道路白線や、ガードレール、縁石、反射板や車両等であることを特定することの可能な情報を手がかり情報として予め設定しておき、これを所定の記憶領域に格納しておく。具体的には、前記手がかり情報として、例えば、白線に対しては「150mm程度の幅」とか「白線の両側のエッジ」等が、手がかり情報として設定される。また、縁石に対しては、「自車両左側の高さ200mm程度の段差」とか「路面と異なる色を持つ」等が、手がかり情報として設定される。
【0023】
そして、注視点分布抽出回路12bで検出した注視点分布に基づいて、注視対象物のうち、手がかり情報に該当するものがあるかどうかを検出し、手がかり情報に該当する注視対象物の数を算出する。例えば、図5の場合には、走行車線上の2つの障害物に相当する2つの注視点分布と、道路白線やガードレール等に相当する4つの注視点分布との計6個の注視点分布、すなわち注視対象物があり、そのうち、4つが手がかり情報に該当することから、手がかり情報に該当する注視対象物の数は4個となる。
【0024】
そして、手がかり情報に該当する注視点分布が一つまたは零である場合には、運転者の注視対象物は、手がかりとなり得る物体ではなく、障害物であると判断しステップS6に移行する。そして、視野領域外に障害物が存在する場合には、障害物警報を発する。
一方、手がかり情報に該当する注視対象物が少なくとも2つ以上含まれている場合には、運転者は手がかり情報を取得していることから、注視対象物は手がかりとなり得る物体であると予測し、前記ステップS4で算出した運転者の視野領域が広いかどうかを判定する。すなわち、運転技量レベルが高い運転者であっても、また、運転負荷が低い場合であっても、視野領域が狭くなるときがある。このような場合には、手がかり情報を、すなわち最適経路の情報を積極的に与えることによって、自車両が進むべき経路が明確になり、安定した運転を達成することができる。そこで、この実施形態では、運転者の視野領域が狭くなっているときには、ステップS13に移行し、経路情報の提示を行う。
【0025】
前記視野領域が狭くなっているかどうかの判断は次の手順で行う。まず、前記ステップS1で算出した、操舵場面に相当する道路を過去に走行した場合の視野領域を、走行履歴情報として予め収集しておく。そして、走行履歴情報に基づいて、前記操舵場面に相当する道路を過去に走行したときの視野領域の平均値を算出し、この平均値と、今回の視野領域とを比較することで判断する。つまり、今回の視野領域が、過去の視野領域の平均値よりも小さいときには、視野領域が狭くなっていると判断する。
【0026】
そして、視野領域が狭くなっていると判断されるときには、ステップS13に移行し、視野領域が狭くなっており、経路提示が必要と判断し、経路提示装置16による情報提示を行う。例えば図7に示すように、ナビゲーション装置13の表示装置13aにおいて、通常の自車両基準の周辺の道路地図に代えて、曲路において、自車両の最適経路を明示した画像を表示したり、あるいは、ヘッドアップディスプレイによって、車両前方の風景に最適経路を重ね合わせて表示したりする。
一方、視野領域が狭くなっていない場合には、運転者は、自車両の最適経路を十分把握しており経路提示は不要と判定し、情報提示は行わずそのまま処理を終了する。
【0027】
次に、上記第1の実施の形態の動作を説明する。
視線検出装置11では、所定周期で、運転者の視線方向を検出し、注視対象判定装置12では、運転者の視線方向と前方カメラ12aの撮像画像とを重ね合わせて、運転者の注視点分布を検出する。また、操舵場面判定装置14では、ナビゲーション装置13からの道路地図情報に基づいて操舵を行う状況にあるかどうかを判断する。
【0028】
そして、このとき、運転者が操舵を行う状況にあり、運転者の視線が向けられた注視対象物に対する注視点数が多い場合には(ステップS1〜ステップS4)、運転者の運転技量レベルが低いか、又は運転負荷が高い状態であると予測されることから、運転者の注視対象物は障害物であると予測し、ステップS5からステップS6に移行し、運転者の視野対象領域外に障害物が存在するかどうかを判断する。そして、視野領域外に障害物が存在しない場合には、障害物警報は発令されない。
【0029】
したがって、運転者が自車両前方の注視対象物、すなわち障害物等を認識しているにも関わらず、障害物警報を発することによって運転者に煩わしさ感を与えることを回避することができる。また、運転者の運転技量のレベルが低い場合や、運転者の運転負荷が高い状態である場合には、障害物警報を発することによって、場合によっては、かえって自車両前方の障害物に対する注意力を削ぐ可能性も考えられるが、上述のように、運転者の視野領域内に注視対象物が存在し、運転者がこの注視対象物を十分認識しているとみなすことの可能な場合には、障害物警報を発しないから、不要な障害物警報を発することによって運転者に悪影響を及ぼすことを回避することができる。このとき、操舵場面であるにも関わらず、経路表示が行われないことになるが、この場合、運転者の運転技量のレベルが低いか、又は運転者の運転負荷が高い状態であって、運転者には、滑らかな経路選択や楽な操舵を実現するために適した経路を探す余裕はないと予測されることから、経路表示を行わなくとも何ら問題はなく、自車両前方の障害物を注視している状態で、不要な経路表示を行うことによってかえって運転者の障害物に対する注意を削ぐことを回避することができる。
【0030】
逆に、運転者の視野対象領域外に障害物が存在する場合には、ステップS6からステップS7に移行して障害物警報が発令される。したがって、運転者の運転技量レベルが低い場合や、運転者の運転負荷が高い状態である場合には、障害物を見落とす可能性が高くなるが、このように運転者の視野領域外に障害物があるとき、すなわち運転者が認識していない障害物が存在するときには、障害物警報を発するから、障害物の存在を、運転者に確実に認識させることができる。
【0031】
一方、例えば、運転者の運転技量レベルが比較的高いとき、あるいは運転者の運転負荷が比較的低い状態である場合には、運転者は、注視対象物の存在を確実に認識し、この注視対象物に対して視線を向ける回数も比較的少なくなることから、注視対象物に対する注視点数が少なくなる。
このため、全ての注視対象物に対する注視点数の比率がそのしきい値Pより大きくなると、ステップS5からステップS11に移行し、このとき、運転者が、道路白線や、ガードレールあるいは縁石等といった曲路を走行するための手がかりの情報を取得している場合にはステップS12に移行し、さらに、このときの運転者の視野領域が以前通行したときよりも狭いと予測されるときには、ステップS13に移行して、自車両の最適経路を明示した表示を行う経路情報提示が行われる。
【0032】
つまり、運転者が、道路白線や、ガードレールあるいは縁石等といった曲路を走行するための手がかりの情報を取得しており、運転者が安全確認のために障害物を経路上に探しているわけではなく、滑らかな経路選択や楽な操舵を実現するために適した経路を探していると予測されるときには、自車両の最適経路を表示する経路情報提示が行われる。このため、運転者は、表示された経路情報を参照することによって、自車両が進むべき最適経路を明確に認識することができ、運転者はより安定した運転行動を行うことができる。
【0033】
このとき、障害物が存在する場合であっても、障害物警報は発せられないが、このように、障害物警報よりも経路情報の提示を希望している状態は、運転者が障害物を十分認識している状態であるか、あるいは、それほど注意を払う必要のない障害物であるとみなすことができるから、障害物警報が発令されなくても問題はなく、障害物警報を発することによって却って運転者に対して煩わしさ感を与えることを回避することができる。
【0034】
一方、運転者の視野領域が以前と同等あるいはそれよりも広い場合には、曲路を走行するにあたって以前この操舵場面に相当する地点を走行した場合と同等の視野領域であって、滑らかな経路選択や楽な操舵操作を実現するために適した経路を十分認識していると予測されることから、経路表示を行う必要はないと予測し、そのまま処理を終了して経路表示は行われない。
したがって、運転者が、比較的運転負荷が低いときあるいは運転技量のレベルが高く、前方の操舵場面を走行するにあたってその経路を十分認識しており、経路表示を必要としていない状態で、不要な経路情報の表示が行われることによって、かえって、運転者に煩わしさ感を与えることを回避することができる。
【0035】
このように、上記第1の実施の形態においては、運転支援装置において、操舵を行う状況であるときに、運転者が、安全確認のために障害物を経路上に探している状態であるのか、あるいは、滑らかな経路選択や楽な操舵を実現するために適した経路を探しているのかを判定し、経路を探している場合には経路表示のみを行うようにし、障害物を探しているときには、認識していない障害物があるときにのみ障害物警報を発するようにしたから、運転者が操舵を行う場面において、望んでいる情報に合致する情報を提供することができると共に、煩わしさ感を与えることなく実現することができる。
【0036】
特に、運転者は、障害物警報が発令された場合には、障害物に対して注意を払うようになり、また、経路表示が行われた場合には、経路表示に対して注意を払うようになる。これら障害物警報の発令と経路表示との何れか一方のみが行われる場合には、図8に示すように、障害物警報の発令又は経路表示に対して、運転者が払う注意量は、運転者の許容範囲内に収まるが、障害物警報の発令と経路表示とが共に行われた場合には、その総和分相当の注意を払う必要があり、運転技量のレベルが低い運転者、あるいは運転負荷が比較的高い状態である場合等には、場合によっては、障害物警報及び経路表示に対して運転者が払う注意量の総和が、運転者の許容範囲を越えてしまい、障害物警報及び経路表示に対して運転者が十分な注意を払うことができず、障害物に対する注意量が少なくなったり、あるいは、経路表示に対する注意量が少なくなったりする場合があり、情報提供や経路表示を行うことによって、運転支援を行っても十分な注意が払われなかったり有効に活用されなかったりする場合がある。
【0037】
しかしながら、上述のように、障害物警報及び経路表示のうちの何れか一方のみを情報提示するから、運転者は障害物警報及び経路表示の何れに対しても十分注意を払うことができ、有効な運転支援を行うことができる。
また、注視点分布を抽出する際には、前方カメラ12aで撮像した自車両前方の撮像画像と、運転者の視線方向とから、一般的な運転者の視線配分行動に則した方法に基づいて注視対象物を判定しているから、運転者の運転技量レベルや運転者に課された運転負荷に応じて変化する注視行動を適切に捉えることができる。
【0038】
また、このとき、運転者の注視対象物に対する視線の配り方や、視野領域等を考慮して、運転者が障害物警報を望んでいる状態にあるか、あるいは経路表示を望んでいる状態にあるかを判断すると共に、これら情報を提供するかどうかを判断するようにしたから、運転者の運転技量のレベルや運転者の運転負荷に応じて、その時々で適した判定を行うことができ、より的確に情報提供を行うことができると共に、煩わしさ感を与えることなく、効果的に運転支援を行うことができる。
【0039】
また、運転者の視線行動に基づいて運転者の注視対象物を判別するようにしているから、運転者の注視対象物を容易且つ的確に検出することができる。
また、ナビゲーション装置13で保持する自車両周辺の道路地図情報に基づいて前方に曲路が存在するかどうかを判断するようにしているから、操舵を行う状況にあるかどうかを容易且つ的確に判断することができる。
【0040】
なお、上記第1の実施の形態において、経路提示装置16及び障害物警報装置17が運転支援手段に対応し、経路提示装置16が経路情報提供手段に対応し、障害物警報装置17が障害物情報提供手段に対応している。また、図4のステップS1の処理が操舵場面検出手段に対応し、ステップS2からステップS5及びステップS11の処理が注視対象判別手段に対応し、ステップS6及びステップS12の処理が提供情報決定手段に対応している。
【0041】
また、図4のステップS2の処理が視線方向検出手段に対応し、前方カメラ12aが前方撮像手段に対応し、ステップS3で抽出物体を抽出する処理が物体抽出手段に対応し、ステップS5の処理が注視比率検出手段に対応し、ステップS11の処理が手がかり該当数検出手段に対応している。
また、図4のステップS5で、運転者の視線が向けられた抽出物体の撮像画像上での占有面積を検出する処理が占有面積検出手段に対応し、注視点の数を計測する処理が注視点数計測手段に対応している。
また、図4のステップS4の処理が視野領域推測手段に対応し、ステップS6の処理が視野領域外障害物検出手段に対応している。
【0042】
次に、本発明の第2の実施の形態を説明する。
図9は、第2の実施の形態における、運転支援装置200の機能構成図である。
この第2の実施の形態における運転支援装置200は、図9に示すように、上記第1の実施の形態で用いた視線検出装置11と、自車両前方の道路を撮像する前方カメラ21と、この前方カメラ21の撮像画像及び視線検出装置11の検出結果に基づいて、運転者が注視している注視対象物の有無や位置、また、運転者の視野領域等を検出する注視対象判定装置22と、前記前方カメラ21の撮像画像に対して画像処理を行い、自車両前方の道路線形形状を検出する画像処理装置23と、前記注視対象判定装置22の判定結果及び画像処理装置23での処理結果に基づいて警報情報の報知及び経路情報の表示の何れを行うかを判断する提示情報決定回路24と、上記第1の実施の形態で用いた経路提示装置16及び障害物警報装置17を備えている。
【0043】
この第2の実施の形態における注視対象判定装置22は、前記前方カメラ21の撮像画像において、上記第1の実施の形態と同様にして走行路上の物体を抽出物体として検出すると共に、視線検出装置11で検出された視線方向と前記前方カメラ21で検出された撮像画像とを重ね合わせて、前記抽出物体に対して運転者の視線が注視物体、すなわち、注視対象物に配られた時間である注視時間を抽出する注視時間抽出回路22aと、上記第1の実施の形態における視野領域抽出回路12cと同等の視野領域抽出回路22bとを備えている。
【0044】
図10は、運転支援装置200の動作を表すフローチャートである。
前方カメラ21では、予め設定した周期で自車両前方の道路を撮像する。画像処理装置23では、前方カメラ21の撮像画像に対して画像処理を行い、自車両前方の道路形状を検出する。例えば、公知の手順でエッジ抽出処理を行って道路白線を検出し、その道路白線の形状から道路形状を検出する。そして、道路形状から運転者が操舵を行う必要のある状況になるかどうか、すなわち、自車両前方に曲路が存在するかどうかを予測し(ステップS21)、操舵を行う必要のある状況になると予測されない場合には、そのまま処理を終了するが、操舵を行う必要のある状況になると予測されるときには、ステップS22に移行する。
【0045】
このステップS22では、上記第1の実施の形態におけるステップS2の処理と同様の手順で、視線検出装置11において運転者の視線方向を検出し、次いで、ステップS23に移行し、注視時間抽出回路22aで、走行路上の抽出物体を検出すると共に、この抽出物体に対する運転者の注視時間を算出する。ここで、通常、人は対象物を認識する場合、対象物上に視線を動かすことで認識する。この結果として、対象物上には、運転者が対象を認識するまでの過程において視線が滞留する点である注視点が、一定の時間、対象物上に配られることになる。そこで、本実施形態では、前記前方カメラ21の撮像画像に対し、視線検出装置11で検出した、所定時間における運転者の視線方向を重ね合わせることで、車両前方の風景に含まれる少なくとも一つ以上の対象物に注がれた運転者の視線において、個々の対象物に配られた注視点の滞留時間を抽出し、これを注視時間として抽出する。
【0046】
次いで、ステップS24に移行し、視野領域抽出回路22bにおいて上記第1の実施の形態における視野領域抽出回路12cと同様の手順で運転者の視野領域を抽出した後、ステップS25に移行し、ステップS23で検出した、個々の注視対象物に対する運転者の注視時間が長いかどうかを判断する。すなわち、通常、運転者が対象物を認識するとき、運転者の運転技量のレベルが高いときほど注視時間は短くなり、また、運転者に与えられる運転負荷が低いときほど注視時間は短くなる傾向にある。そこで、この実施の形態においては、前方カメラ21の撮像画像における個々の注視対象物の占有面積と、この注視対象物に対する注視時間とに基づいて注視時間比率(=占有面積/注視時間)を算出し、この注視時間比率が予め設定したしきい値Qよりも小さいときには、注視対象物に対する注視時間は長と判断する。そして、個々の注視対象物についてその注視時間比率を算出し、何れか一つでもその注視時間比率がしきい値Qよりも小さいときには、注視対象物に対する注視時間が長く、すなわち、運転者の運転技量のレベルが低いか、又は運転者の運転負荷が高い状態にあると予測されることから、運転者の注視対象物は、障害物である可能性が高いとしてステップS26に移行する。
【0047】
なお、ここでは、各注視対象物に対する注視時間比率のうち、何れか一つでもその注視時間比率がしきい値Qよりも小さいときに、運転者の運転技量のレベルが低い、あるいは運転者の運転負荷が高い状態にあり注視対象物は障害物である可能性が高いとしてステップS26に移行するようにしたが、これに限るものではなく、例えば、複数の注視対象物に対する注視時間比率の平均値等、注視時間比率の分布状況から、運転者の運転技量のレベルが低いか、あるいは運転負荷が高い状態にあるかどうかを推測するようにしてもよい。
【0048】
そして、ステップS26の処理では、上記第1の実施の形態における図4のステップS7の処理と同様の手順で、前方カメラ21の撮像画像において運転者の視野領域の外に、障害物が存在するかどうかを判断し、障害物が存在する場合には、ステップS27に移行し、障害物警報装置17を作動し、運転者の視野領域外に存在する障害物に関する障害物警報を発する。
【0049】
つまり、注視対象物に対する注視時間が比較的長く、運転者の運転技量のレベルが低いか、又は運転者の運転負荷が高い状態であると予測される状態にある状態で、運転者の視野領域外に障害物が存在する場合には、運転者は障害物に気がつかない可能性があると予測し、障害物警報を発する。このとき、操舵場面ではあるにも関わらず、経路表示は行われないが、前述のように、運転者は、その運転技量レベルが低いかあるいはその運転負荷が高い状態であって、運転者は、滑らかな経路選択や楽な操舵を実現するための経路選択を行うといった行動をとることはないと予測されることから、経路表示が行われなくとも何ら問題はなく、障害物警報の発令と共に経路表示を行うことによって、かえって運転者の注意が分散することを回避することができる。
【0050】
逆に、運転者の視野領域の外に、障害物が存在しない(ステップS26)ときには、そのまま処理を終了し、障害物情報は発令しない。つまり、運転者の視野領域の外に障害物は存在しないことから、運転者は自車両前方の障害物を全て認識しているとみなすことができる。したがって、運転者が障害物を認識しているにも関わらず警報を発生させることによって、かえって運転者に煩わしさ感を与えたり、既に認識している障害物からの注意を却ってそらせてしまったりすることを回避することができる。
一方、前記ステップS25の処理で、全ての注視対象物に対する注視時間がしきい値Q以上であると判断されるときには、注視対象物に対する注視時間は短い、すなわち、運転者の運転技量のレベルが高いか、又は運転者の運転負荷が低い状態にあると判断し、ステップS31に移行する。
【0051】
このステップS31では、提示情報決定回路24において、前記ステップS21で抽出した運転者の注視対象物の中に、前記手がかり情報に該当する注視対象物が存在するかどうかを判断する。この判断は上記第1の実施の形態と同様であって、予め手がかり情報を保持しておき、これに基づいて判断する。そして、手がかり情報に該当する注視対象物が存在する場合には該当する注視対象物の数を計数し、所定時間における視線検出の結果、少なくとも2つ以上の注視対象物が手がかり情報に該当するとき、運転者の注視対象物は手がかりとなり得る物体であると判断し、ステップS32に移行する。そして、上記第1の実施の形態における図4のステップS12の処理と同様の手順で、過去にこの操舵場面に該当する道路を走行したときの視野領域の平均値等に基づいて、現在の運転者の視野領域が狭くなっているかどうかを判断し、視野領域が狭くなっていると予測されるときにはステップS33に移行し、経路提示装置16を作動して、運転者に対して経路表示を行う。
【0052】
したがって、注視対象物に対する注視時間が比較的短く、運転者の運転技量のレベルが比較的高いと判定されるか、又は運転者の運転負荷が小さいとみなすことの可能な状態で、操舵場面において運転者が複数の手がかり情報に該当する対象物を注視しているときには、運転者は、安全確認のために経路上の障害物を探すよりも、滑らかな経路の選択や楽な操舵を実現するために適した経路を探している状況であると予測されることから、経路表示が行われることによって、運転者は進むべき最適経路が明確となり、安定した運転が達成されることになる。このとき、障害物警報は発令されないが、このとき、運転者は、運転技量のレベルが高いか運転負荷が低い状態であり、且つ障害物よりも手がかり情報を取得していることから、運転者は障害物を十分認識しているとみなすことが可能な状態であるため、警報が発生されなくても問題はなく、却って、運転者が障害物を十分に認識して手がかり情報の獲得を行っているときに障害物警報が発せられることによって運転者に違和感を与えることを回避することができる。
【0053】
したがって、この第2の実施の形態も上記第1の実施の形態と同等の作用効果を得ることができると共に、この第2の実施の形態においては、注視対象物に対する運転者の注視時間を検出しこれに基づいて情報提示の判断を行うようにしているから、上記第1の実施の形態のように、注視点分布に基づいて情報提示の判断を行う場合に比較してより簡便に行うことができる。また、前方カメラ21の撮像画像に基づいて前方の道路形状を検出するようにしているから、ナビゲーション装置を設けることなく実現することでき、その分、構成品点数を低減することができるから、より安価に実現することができる。
【0054】
なお、上記第2の実施の形態において、経路提示装置16及び障害物警報装置17が運転支援手段に対応し、経路提示装置16が経路情報提供手段に対応し、障害物警報装置17が障害物情報提供手段に対応している。
また、図10のステップS21の処理が操舵場面検出手段に対応し、ステップS22〜S25及びステップS31の処理が注視対象判別手段に対応し、ステップS26及びステップS32の処理が提供情報決定手段に対応している。
【0055】
また、ステップS22の処理が視線方向検出手段に対応し、前方カメラ21が前方撮像手段に対応し、ステップS23で抽出物体を検出する処理が物体抽出手段に対応し、ステップS25の処理が注視比率検出手段に対応し、ステップS31の処理が手がかり該当数検出手段に対応している。
また、図10のステップS25の処理で、運転者の視線が向けられた抽出物体の撮像画像上での占有面積を検出する処理が占有面積検出手段に対応し、ステップS23で抽出物体に対する注視時間を計測する処理が注視時間計測手段に対応し、ステップS24の処理が視野領域推測手段に対応し、ステップS26の処理が視野領域外障害物検出手段に対応している。
【0056】
また、前記カメラ21が走行路形状撮像手段に対応し、画像処理装置23が走行路形状検出手段に対応している。
なお、上記各実施の形態においては、運転者が操舵を行う必要のある状況にないときには、そのまま処理を終了し、障害物警報を発しないようにしているが、これに限るものではなく、運転者が操舵を行う必要のある状況にないときには、障害物の有無に応じて、障害物警報装置のみを作動させるようにしてもよい。
【0057】
また、上記各実施の形態においては、経路表示装置及び障害物警報装置の何れか一方を選択し何れか一方のみにより情報提示を行う場合について説明したが、経路表示装置及び障害物警報装置に限るものではなく、例えば、運転者に駐車を行うための手続を指示する類の駐車支援装置と後方や側方の障害物の存在を報知する後側方警報装置、カーブへの進入速度が超過している際に報知するカーブ進入速度警報装置と車線の逸脱を報知する車線逸脱警報装置等、他の情報提示を行う運転支援装置どうしの組み合わせであっても適用することができる。また、2つの運転支援どうしに限るものではなく、3以上の運転支援装置の中から作動させる運転支援装置を1つ選択するようにしてもよい。
【図面の簡単な説明】
【0058】
【図1】本発明の運転支援装置の機能構成を示すブロック図である。
【図2】図1の、より詳細な機能構成を示す機能ブロック図である。
【図3】視線検出装置の説明に供する図である。
【図4】運転支援装置の動作の一例を示すフローチャートである。
【図5】注視点分布を説明するための説明図である。
【図6】視野領域を説明するための説明図である。
【図7】経路提示装置による提示内容の一例である。
【図8】運転者に要求される注意量を説明するための説明図である。
【図9】第2の実施の形態における機能ブロック図である。
【図10】第2の実施の形態における運転支援装置の動作の一例を示すフローチャートである。
【符号の説明】
【0059】
11 視線検出装置
11a アイカメラ
11b 画像処理装置
12 注視対象判定装置
12a 前方カメラ
12b 注視点分布抽出回路
12c 視野領域抽出回路
13 ナビゲーション装置
14 操舵場面判定装置
15 提示情報決定回路
16 経路提示装置
17 障害物警報装置
21 前方カメラ
22 注視対象判定装置
22a 注視時間抽出回路
22b 視野領域抽出回路
23 画像処理装置
24 提示情報決定回路
【特許請求の範囲】
【請求項1】
運転者に対し、運転支援情報を提供する運転支援手段を複数備え、且つ前記運転支援手段は支援内容の異なる運転支援情報を提供する運転支援装置において、
運転者の注視対象を検出すると共にその種別を判別する注視対象判別手段と、
当該注視対象判別手段で判別した前記注視対象の種別に基づいて、前記運転者が現在必要としている運転支援情報を推測し、前記運転支援手段のうち、前記運転者が必要としている運転支援情報を提供する運転支援手段のみを作動させる提供情報決定手段と、を備えることを特徴とする運転支援装置。
【請求項2】
曲路走行時に前記曲路を走行する際の適切な経路を示す経路情報を提供する経路情報提供手段と、
自車両周辺の障害物情報を提供する障害物情報提供手段と、
運転者の視線方向を検出する視線方向検出手段と、
当該視線方向検出手段で検出した視線方向から前記運転者の注視対象を検出すると共にその種別を判別する注視対象判別手段と、
自車両が曲路を走行する状況にあるかどうかを検出する操舵場面検出手段と、
前記注視対象判別手段で判別した注視対象の種別及び前記操舵場面検出手段の検出結果に基づいて、前記運転者が、前記経路情報及び前記障害物情報のうち、何れの情報を現在必要としているかを推測し、前記経路情報提供手段及び前記障害物情報提供手段のうち、前記運転者が現在必要としている情報を提供する手段のみを作動させる提供情報決定手段と、を備えることを特徴とする運転支援装置。
【請求項3】
前記注視対象判別手段は、前記運転者の注視対象が、自車両の走行路上の障害物であるのか、前記曲路を走行する際の運転者の経路の決定に用いる手がかりとなり得る物体であるのかを判別することを特徴とする請求項2記載の運転支援装置。
【請求項4】
車両前方を撮像する前方撮像手段と、
当該前方撮像手段で撮像した前方撮像画像において、自車両の走行路上の物体を抽出する物体抽出手段と、を備え、
前記注視対象判別手段は、前記運転者の視線が向けられた前記撮像画像上の点を注視点としたとき、前記視線方向検出手段で検出した視線方向に基づき、前記物体抽出手段で抽出した抽出物体に対する前記注視点の分布状況を検出し、これに基づき前記抽出物体に対する運転者の注視度合を検出する注視度合検出手段と、
前記運転者の視線が向けられた前記抽出物体のうち、前記抽出物体が前記手がかりとなり得る物体であるかどうかを判別するための、予め設定した手がかり情報を満足する抽出物体の数を検出する手がかり該当数検出手段と、を備え、
前記注視度合検出手段で検出される注視度合から前記運転者の前記抽出物体に対する注視度合が小さいと推測され且つ前記手がかり該当数検出手段で検出される手がかり該当数が予め設定した手がかり該当数のしきい値以上であるとき、前記注視対象は前記手がかりとなり得る物体であると判別し、
前記注視度合から前記運転者の前記抽出物体に対する注視度合が大きいと推測されるとき又は前記手がかり該当数がそのしきい値よりも小さいとき、前記注視対象は前記障害物であると判別することを特徴とする請求項3記載の運転支援装置。
【請求項5】
前記注視度合検出手段は、前記運転者の視線が向けられた前記抽出物体の前記撮像画像上での占有面積を検出する占有面積検出手段と、
前記運転者の視線が向けられた前記抽出物体に対する注視点の数を計測する注視点数計測手段と、を備え、
前記占有面積検出手段で検出される前記抽出物体の占有面積と前記注視点数計測手段で計測される前記注視点の数との比率である注視点数比率(占有面積/注視点の数)を前記注視度合として算出し、
前記注視対象判別手段は、前記注視点数比率が予め設定したそのしきい値以下であるとき前記運転者の前記抽出物体に対する注視度合が大きいと判断し、前記注視点比率がそのしきい値より大きいとき前記注視度合が小さいと判断することを特徴とする請求項4記載の運転支援装置。
【請求項6】
前記注視比率検出手段は、前記運転者の視線が向けられた前記抽出物体の前記撮像画像上での占有面積を検出する占有面積検出手段と、
前記運転者の視線が向けられた前記抽出物体に対する注視時間を計測する注視時間計測手段と、を備え、
前記占有面積検出手段で検出される前記抽出物体の占有面積と前記注視時間計測手段で計測される注視時間との比率である注視時間比率(占有面積/注視時間)を、前記注視度合として算出し、
前記注視対象判別手段は、前記注視時間比率が予め設定したそのしきい値以下であるとき前記運転者の前記抽出物体に対する注視度合が大きいと判断し、前記注視時間比率がそのしきい値より大きいとき前記注視度合が小さいと判断することを特徴とする請求項4記載の運転支援装置。
【請求項7】
前記撮像画像上における前記注視点の分布状況から前記運転者の視野領域を推測する視野領域推測手段と、
当該視野領域推測手段で推測される視野領域外に障害物が存在するかどうかを検出する視野領域外障害物検出手段と、を備え、
前記提供情報決定手段は、前記操舵場面検出手段で前記操舵場面であることが検出された場合に、前記注視対象判別手段で前記運転者の注視対象物が前記手がかりとなり得る物体であると判別され且つ前記視野領域推測手段で推測される視野領域が予め設定した視野領域よりも狭いとき前記経路情報提供手段を作動させ、
前記注視対象判別手段で前記運転者の注視対象物が前記走行路上の障害物であると判別され且つ前記視野領域外障害物検出手段で前記視野領域外に障害物が存在することが検出されたとき、前記障害物情報提供手段を作動させることを特徴とする請求項4から請求項6の何れか1項に記載の運転支援装置。
【請求項8】
自車両周辺の道路地図情報を保持するナビゲーション装置を備え、
前記操舵場面検出手段は、前記ナビゲーション装置で保持する前記自車両周辺の道路地図情報に基づいて、
自車両が曲路を走行する状況にあるかどうかを検出することを特徴とする請求項2から請求項7の何れか1項に記載の運転支援装置。
【請求項9】
自車両前方の走行路形状を撮像する走行路形状撮像手段と、
当該走行路形状撮像手段の撮像画像に基づいて自車両前方の走行路形状を検出する走行路形状検出手段と、を備え、
前記操舵場面検出手段は、前記走行路形状検出手段で検出した走行路形状に基づいて、自車両が曲路を走行する状況にあるかどうかを検出することを特徴とする請求項2から請求項7の何れか1項に記載の運転支援装置。
【請求項10】
前記前方撮像手段の撮像画像に基づいて自車両前方の走行迂路形状を検出する走行路形状検出手段を備え、
前記操舵場面検出手段は、前記走行路形状検出手段で検出した走行路形状に基づいて、自車両が曲路を走行する状況にあるかどうかを検出することを特徴とする請求項4から請求項7の何れか1項に記載の運転支援装置。
【請求項11】
運転者に対し、支援内容の異なる複数の運転支援情報を提供するようにした運転支援方法において、
運転者の注視対象物を検出すると共にその種別を判別し、前記注視対象物の種別から、前記運転者が現在必要としている運転支援情報を推測し、前記複数の運転支援情報のうち、前記運転者が現在必要としている運転支援情報のみを提供することを特徴とする運転支援方法。
【請求項12】
運転者に対し、曲路走行時の最適経路を表す経路情報と、自車両周辺の障害物情報とを提供するようにした運転支援方法において、
前記運転者の注視対象物を検出すると共にその種別を判別し、自車両が曲路を走行する状況にあるとき、前記注視対象物の種別の判別結果に基づいて、前記経路情報及び前記障害物情報の何れを必要としているかを推測し、
前記経路情報及び前記障害物情報のうち、前記運転者が必要としていると推測される情報のみを提供することを特徴とする運転支援方法。
【請求項1】
運転者に対し、運転支援情報を提供する運転支援手段を複数備え、且つ前記運転支援手段は支援内容の異なる運転支援情報を提供する運転支援装置において、
運転者の注視対象を検出すると共にその種別を判別する注視対象判別手段と、
当該注視対象判別手段で判別した前記注視対象の種別に基づいて、前記運転者が現在必要としている運転支援情報を推測し、前記運転支援手段のうち、前記運転者が必要としている運転支援情報を提供する運転支援手段のみを作動させる提供情報決定手段と、を備えることを特徴とする運転支援装置。
【請求項2】
曲路走行時に前記曲路を走行する際の適切な経路を示す経路情報を提供する経路情報提供手段と、
自車両周辺の障害物情報を提供する障害物情報提供手段と、
運転者の視線方向を検出する視線方向検出手段と、
当該視線方向検出手段で検出した視線方向から前記運転者の注視対象を検出すると共にその種別を判別する注視対象判別手段と、
自車両が曲路を走行する状況にあるかどうかを検出する操舵場面検出手段と、
前記注視対象判別手段で判別した注視対象の種別及び前記操舵場面検出手段の検出結果に基づいて、前記運転者が、前記経路情報及び前記障害物情報のうち、何れの情報を現在必要としているかを推測し、前記経路情報提供手段及び前記障害物情報提供手段のうち、前記運転者が現在必要としている情報を提供する手段のみを作動させる提供情報決定手段と、を備えることを特徴とする運転支援装置。
【請求項3】
前記注視対象判別手段は、前記運転者の注視対象が、自車両の走行路上の障害物であるのか、前記曲路を走行する際の運転者の経路の決定に用いる手がかりとなり得る物体であるのかを判別することを特徴とする請求項2記載の運転支援装置。
【請求項4】
車両前方を撮像する前方撮像手段と、
当該前方撮像手段で撮像した前方撮像画像において、自車両の走行路上の物体を抽出する物体抽出手段と、を備え、
前記注視対象判別手段は、前記運転者の視線が向けられた前記撮像画像上の点を注視点としたとき、前記視線方向検出手段で検出した視線方向に基づき、前記物体抽出手段で抽出した抽出物体に対する前記注視点の分布状況を検出し、これに基づき前記抽出物体に対する運転者の注視度合を検出する注視度合検出手段と、
前記運転者の視線が向けられた前記抽出物体のうち、前記抽出物体が前記手がかりとなり得る物体であるかどうかを判別するための、予め設定した手がかり情報を満足する抽出物体の数を検出する手がかり該当数検出手段と、を備え、
前記注視度合検出手段で検出される注視度合から前記運転者の前記抽出物体に対する注視度合が小さいと推測され且つ前記手がかり該当数検出手段で検出される手がかり該当数が予め設定した手がかり該当数のしきい値以上であるとき、前記注視対象は前記手がかりとなり得る物体であると判別し、
前記注視度合から前記運転者の前記抽出物体に対する注視度合が大きいと推測されるとき又は前記手がかり該当数がそのしきい値よりも小さいとき、前記注視対象は前記障害物であると判別することを特徴とする請求項3記載の運転支援装置。
【請求項5】
前記注視度合検出手段は、前記運転者の視線が向けられた前記抽出物体の前記撮像画像上での占有面積を検出する占有面積検出手段と、
前記運転者の視線が向けられた前記抽出物体に対する注視点の数を計測する注視点数計測手段と、を備え、
前記占有面積検出手段で検出される前記抽出物体の占有面積と前記注視点数計測手段で計測される前記注視点の数との比率である注視点数比率(占有面積/注視点の数)を前記注視度合として算出し、
前記注視対象判別手段は、前記注視点数比率が予め設定したそのしきい値以下であるとき前記運転者の前記抽出物体に対する注視度合が大きいと判断し、前記注視点比率がそのしきい値より大きいとき前記注視度合が小さいと判断することを特徴とする請求項4記載の運転支援装置。
【請求項6】
前記注視比率検出手段は、前記運転者の視線が向けられた前記抽出物体の前記撮像画像上での占有面積を検出する占有面積検出手段と、
前記運転者の視線が向けられた前記抽出物体に対する注視時間を計測する注視時間計測手段と、を備え、
前記占有面積検出手段で検出される前記抽出物体の占有面積と前記注視時間計測手段で計測される注視時間との比率である注視時間比率(占有面積/注視時間)を、前記注視度合として算出し、
前記注視対象判別手段は、前記注視時間比率が予め設定したそのしきい値以下であるとき前記運転者の前記抽出物体に対する注視度合が大きいと判断し、前記注視時間比率がそのしきい値より大きいとき前記注視度合が小さいと判断することを特徴とする請求項4記載の運転支援装置。
【請求項7】
前記撮像画像上における前記注視点の分布状況から前記運転者の視野領域を推測する視野領域推測手段と、
当該視野領域推測手段で推測される視野領域外に障害物が存在するかどうかを検出する視野領域外障害物検出手段と、を備え、
前記提供情報決定手段は、前記操舵場面検出手段で前記操舵場面であることが検出された場合に、前記注視対象判別手段で前記運転者の注視対象物が前記手がかりとなり得る物体であると判別され且つ前記視野領域推測手段で推測される視野領域が予め設定した視野領域よりも狭いとき前記経路情報提供手段を作動させ、
前記注視対象判別手段で前記運転者の注視対象物が前記走行路上の障害物であると判別され且つ前記視野領域外障害物検出手段で前記視野領域外に障害物が存在することが検出されたとき、前記障害物情報提供手段を作動させることを特徴とする請求項4から請求項6の何れか1項に記載の運転支援装置。
【請求項8】
自車両周辺の道路地図情報を保持するナビゲーション装置を備え、
前記操舵場面検出手段は、前記ナビゲーション装置で保持する前記自車両周辺の道路地図情報に基づいて、
自車両が曲路を走行する状況にあるかどうかを検出することを特徴とする請求項2から請求項7の何れか1項に記載の運転支援装置。
【請求項9】
自車両前方の走行路形状を撮像する走行路形状撮像手段と、
当該走行路形状撮像手段の撮像画像に基づいて自車両前方の走行路形状を検出する走行路形状検出手段と、を備え、
前記操舵場面検出手段は、前記走行路形状検出手段で検出した走行路形状に基づいて、自車両が曲路を走行する状況にあるかどうかを検出することを特徴とする請求項2から請求項7の何れか1項に記載の運転支援装置。
【請求項10】
前記前方撮像手段の撮像画像に基づいて自車両前方の走行迂路形状を検出する走行路形状検出手段を備え、
前記操舵場面検出手段は、前記走行路形状検出手段で検出した走行路形状に基づいて、自車両が曲路を走行する状況にあるかどうかを検出することを特徴とする請求項4から請求項7の何れか1項に記載の運転支援装置。
【請求項11】
運転者に対し、支援内容の異なる複数の運転支援情報を提供するようにした運転支援方法において、
運転者の注視対象物を検出すると共にその種別を判別し、前記注視対象物の種別から、前記運転者が現在必要としている運転支援情報を推測し、前記複数の運転支援情報のうち、前記運転者が現在必要としている運転支援情報のみを提供することを特徴とする運転支援方法。
【請求項12】
運転者に対し、曲路走行時の最適経路を表す経路情報と、自車両周辺の障害物情報とを提供するようにした運転支援方法において、
前記運転者の注視対象物を検出すると共にその種別を判別し、自車両が曲路を走行する状況にあるとき、前記注視対象物の種別の判別結果に基づいて、前記経路情報及び前記障害物情報の何れを必要としているかを推測し、
前記経路情報及び前記障害物情報のうち、前記運転者が必要としていると推測される情報のみを提供することを特徴とする運転支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−128427(P2007−128427A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−322309(P2005−322309)
【出願日】平成17年11月7日(2005.11.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月7日(2005.11.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]