
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、オートクルーズ走行制御や定速走行制御などにおいて、走行道路の制限車速情報に基づき求めた目標車速となるように車両の車速を制御可能な車両の運転支援技術に関する。
【背景技術】
【0002】
道路標識に基づいた運転支援装置としては、特許文献1に記載の装置がある。この装置は、ナビゲーション装置内の地図データに設定された速度制限表示位置情報に基づいて、法定速度変化を報知或いは走行速度調整をする。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−221973号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1では、地図データの誤差により、地図上の速度制限表示位置と実際の道路上での表示位置とが異なり、運転者に違和感を与えてしまうという問題があった。
本発明は、上記のような点に着目したもので、必ずしもカメラで制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度切り替わり位置の情報を道路上での位置と合わせることで、運転者に制限車速の切り替えについて違和感を防止することを目的としている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明は、地図データの情報に基づき取得した道路の制限車速情報、及び予め設定された制限車速変化推定範囲内に自車両が位置しているときに運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき上記地図データ中の制限車速切り替わり位置の情報を更新する。
【発明の効果】
【0006】
本発明によれば、予め設定された制限車速変化推定範囲内に自車両が位置しているときに運転者が操作する目標車速変更操作子の操作に基づき地図データ中の制限車速に関する情報を更新する。このため、地図データに示された制限速度切り替わり位置の情報を道路上での位置と合わせることができ、運転者が制限速度の切り替わりについて違和感を防止できる。
【図面の簡単な説明】
【0007】
【図1】本発明に基づく実施形態に係る車両の概要構成を示す図である。
【図2】本発明に基づく実施形態に係るシステム構成を示す図である。
【図3】本発明に基づく実施形態に係るコントローラの構成例を示す図である。
【図4】本発明に基づく実施形態に係る車速制限情報処理部の処理例を示すフローチャートである。
【図5】制限車速変化指定範囲と制限車速表示認識可能範囲の例を示す図である。
【図6】本発明に基づく実施形態に係る運転者への制限車速変化通知例の表示図である。
【図7】本発明に基づく実施形態に係るSW操作判定処理の処理手順の一例を示すフローチャートである。
【図8】本発明に基づく実施形態に係る制限車速切り替わり位置の補正処理手順の一例を示すフローチャートである。
【図9】制限車速切り替わり位置の補正処理の動作説明図である。
【図10】制限車速切り替わり位置の補正処理のタイミングチャート例である。
【図11】本発明に基づく実施形態に係るコントローラの別の構成例を示す図である。
【発明を実施するための形態】
【0008】
次に、本発明の実施形態について図面を参照して説明する。
(構成)
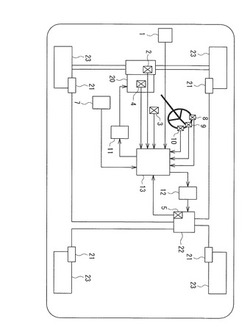
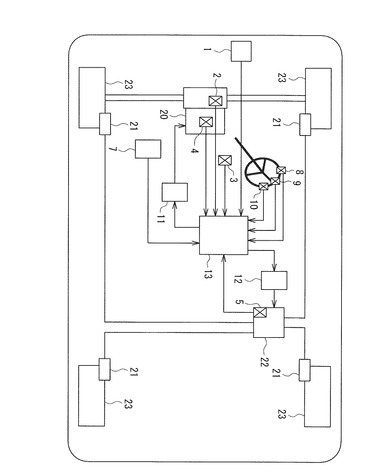
車両1は、駆動力(駆動トルク)を発生する駆動装置、及び制動力を発生する制動装置を備える。
駆動装置は、図1に示すように、駆動源としてのエンジン20と、エンジンで発生するトルク(駆動力)を駆動力指令値に応じた値に制御するスロットルアクチュエータ11とを備える。駆動装置の駆動源は、エンジン20に限定されず、電動モータであっても良いし、エンジンとモータを組合せたハイブリッド構成であっても良い。
【0009】
制動装置は、図1に示すように、車輪23に設けられるブレーキ装置21と、その各ブレーキ装置に接続する流体圧回路22と、ブレーキアクチュエータ12とを備える。ブレーキアクチュエータ12は、上記流体圧回路22を介して各ブレーキ装置21で発生する制動力を、制動力指令値に応じた値に制御する。ブレーキ装置21は、流体圧で制動力を付与する装置に限定されず、電動ブレーキ装置等であっても良い。
【0010】
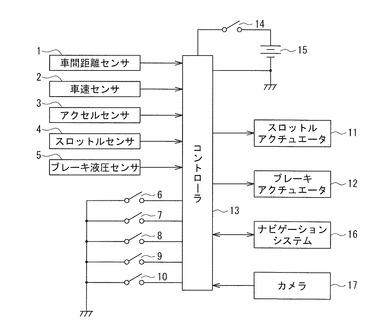
また車両は、車間距離センサ1、車速センサ2、アクセルセンサ3、スロットルセンサ4、ブレーキ液圧センサ5、及び図2に示すような各種スイッチ6〜10を備える。
車間距離センサ1は、先行車との車間距離を計測する。車間距離センサ1は、例えばレーザー距離計から構成されて、レーザービームを車両前方の左右方向に走査して先行車からの反射光を受光し、先行車との車間距離を計測する。車間距離センサ1は、電波や超音波により車間距離を計測するセンサから構成されても良い。
【0011】
車速センサ2は、車両の走行速度(車速)Vを検出するためのセンサである。車速センサ2は、例えば変速機の出力軸に取り付けられ、その回転速度に応じた周期のパルス信号を出力する。この車速パルス信号の周期またはパルス数を計測することによって、車両の走行速度(車速)Vを検出することができる。
アクセルセンサ3は、アクセルペダル(不図示)の踏み込み量accを検出する。スロットルセンサ4はスロットルバルブ開度θthを検出する。さらにブレーキ液圧センサ5はブレーキ液圧Pbrkを検出する。
【0012】
メインスイッチ6は、ONとなることで、コントローラ13や他の車速制御機器に電源を供給し、車間距離制御および車速制御の準備完了状態にする。
ブレーキスイッチ7は、ブレーキペダルの踏み込みを検出するスイッチである。このブレーキスイッチ7によりブレーキペダルの踏み込みが検出された時は、キャンセルSW操作時と同様に車速制御を解除する。
【0013】
スロットルアクチュエータ11は、バキュームポンプ、ベントバルブ、セーフティバルブなどを備える。そして、スロットルアクチュエータ11は、ポンプモータやバルブソレノイドを駆動してスロットルバルブ開度を調節し、エンジントルクすなわち車両の駆動力を制御する。
ブレーキアクチュエータ12は、負圧式ブースターを備えて、上記ブレーキアクチュエータ12を構成する。そして、ブレーキアクチュエータ12は、ブレーキ液圧を調節して車両の制動力を制御する。
【0014】
また、車両はコントローラ13及びナビゲーションシステム16を備える。
また、車両は、セット/コーストSW8、リジューム/アクセラレートSW9およびキャンセルSW10を備える。これらのSW8,9,10は、例えばステアリングホイールなどに設けられる。これらのSW8,9,10は、検出信号をコントローラ13に出力する。
【0015】
ナビゲーションシステム16は、走行中の道路の制限車速情報、前方道路の制限車速情報、制限車速が切り替わるまでの距離などの信号を取得してコントローラ13に供給する。ナビゲーションシステム16、GPS機能も有し、自車位置を検出してコントローラ13に供給する。
コントローラ13は、マイクロコンピューターとメモリなどの周辺部品から構成され、後述する制御プログラムを実行して車間距離制御、車速制御、設定速度Vsetの設定および変更処理その他を行う。なお、コントローラ13、センサ1〜5およびアクチュエータ11,12には、イグニッションキースイッチ14を介してバッテリー15から電源が供給される。
【0016】
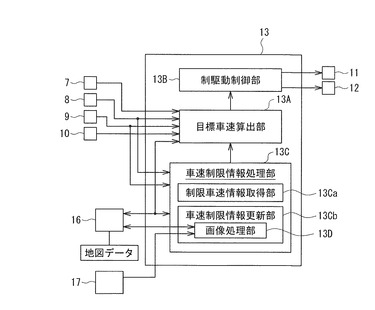
コントローラ13は、運転支援に関わる部分の処理として、図3に示すように、目標車速算出部13A、制駆動制御部13B、車速制限情報処理部13Cを備える。車速制限情報処理部13Cは、制限車速情報取得部13Caと車速制限情報更新部13Cbとを備える。
制限車速情報取得部13Caは、ナビゲーションシステム16の地図データの情報に基づき走行道路の制限車速情報を取得する。車速制限情報更新部13Cbは、目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。ここで、本実施形態の目標車速変更操作子の操作は、車速制御中における、セット/コーストSW8又はリジューム/アクセラレートSW9の操作である。
【0017】
また、目標車速算出部13Aは、運転者が車速変更のために操作した上記目標車速変更操作子の操作情報と上記制限車速情報取得部13Caが取得した制限車速情報とに基づき目標車速を求める。制駆動制御部13Bは、目標車速算出部13Aが算出した目標車速とするための、駆動力指令値及び制動力指令値を演算し、上記スロットルアクチュエータ11及びブレーキアクチュエータ12に出力する。
【0018】
目標車速算出部13Aの処理について説明する。
目標車速算出部13Aは、セット/コーストSW8が非車速制御中に操作されることを検出すると、操作時点の実車速Vを設定速度Vsetに設定する。設定速度Vsetが目標車速となる。これによって、制駆動制御部13Bは、運転者がアクセル操作をしないでも設定速度Vsetで一定速度で走行するように車両の制駆動力を制御する。
【0019】
また、目標車速算出部13Aは、セット/コーストSW8が車速制御中に短押し操作(短時間のSW操作)されることを検出すると、設定速度Vsetを一定速度下げた車速に変更する。
目標車速算出部13Aは、リジューム/アクセラレートSW9が、車速制御中に短押し操作(短時間のSW操作)されることを検出すると、設定速度Vsetを一定速度上げた車速に変更する。これによって制駆動制御部13Bは、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。
【0020】
また、また、目標車速算出部13Aは、車速制御中にセット/コーストSW8を長押し操作(一定時間周期以上のSW操作)されることを検出すると、設定速度Vsetを一定速度下げる操作を一定時間毎に繰り返し行なう。また、目標車速算出部13Aは、リジューム/アクセラレートSW9が、車速制御中に長押し操作(一定時間周期以上のSW操作)されると、設定速度Vsetを一定速度上げる操作を一定時間毎に繰り返し行なう。これによって制駆動制御部13Bは、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。ただし、自車位置が、後述の制限車速変化推定領域内に位置する場合には、車速制御中にセット/コーストSW8を長押し操作及びリジューム/アクセラレートSW9が、車速制御中に長押し操作された際の設定速度Vsetの変更は、車速制限情報処理部13Cでの変更処理を優先する。
【0021】
目標車速算出部13Aは、車速制御中に、キャンセルSW10が操作された場合は、車速制御をキャンセルする。
また、車両は、カメラ17を備える。カメラ17は、例えば単眼カメラなどのカメラから構成される。
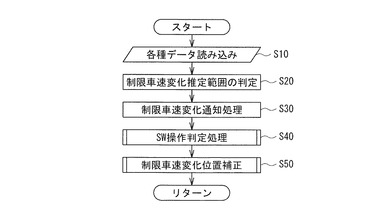
次に、上記コントローラ13により実行される制御プログラムのうちの、制限車速に関する情報を更新する車速制限情報処理部13Cの一例を、フローチャートである図4を参照して説明する。この更新処理は、図示せざるオペレーティングシステムで予め設定した一定の時間毎の定時割り込みで遂行される。
【0022】
上記車速制限情報処理部13Cは、まず、ステップS10では、前記各センサから各種データを読み込む。具体的には、コントローラ13は、ナビゲーションシステム16から現在走行中道路の制限車速Vcurrent_limit、前方道路の制限車速Vnext_limit、地図上で制限車速が切り替わる位置SPまでの距離Change_Distance、セット/コーストSW8、リジューム/アクセラレートSW9およびキャンセルSW10の操作情報、車速V、カメラ17の撮像情報などを読み込む。
【0023】
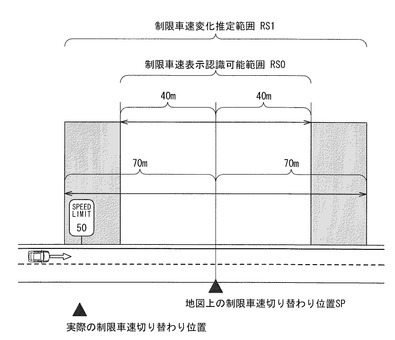
続くステップS20では、車両位置が制限車速変化推定範囲RS1内に存在するか否かの判定を行なう。
ここで、制限車速変化推定範囲RS1は、地図上において、当該範囲内に実際の制限車速標識が存在すると推定される範囲を示す。制限車速変化推定範囲RS1は、現在走行中道路の制限車速Vcurrent_limitと、前方道路の制限車速Vnext_limitとが異なる場合に、その制限速度の変化点(切り替わり点)である地図上での制限車速切り替わり位置SPを基準にして、その前後に予め設定した一定距離の区間を取った範囲である。本実施形態の制限車速変化推定範囲RS1は、地図上での制限車速切り替わり位置SPを中心にして、前後に予め設定した一定距離の区間を設定して決定した範囲である(図5参照)。この制限車速変化推定範囲RS1を規定する上記予め設定した一定距離は、利用するナビゲーションシステム16の地図データ精度、及びGPSを利用して自車が地図データ上のどの位置にいるかを検出するロケータ精度によって決定される。例えば、この制限車速変化推定範囲RS1を、地図上の制限車速切り替わり位置SPの前後70m(=上記予め設定した一定距離)と設定した場合(図5参照)、制限車速が切り替わるまでの距離Change_Distanceが、−70mから70mmの範囲内であると判定すると、制限車速変化推定範囲RS1に自車が存在すると判定する。
【0024】
続くステップS30では、制限車速変化通知処理を行なう。
ステップS20で制限車速変化推定範囲RS1に自車が存在すると判定され、且つ前回の割り込み遂行処理では制限車速変化推定範囲RS1に自車が存在しないと判定されていた場合は、ナビゲーションシステム16の表示部16a上に、現在走行中道路の制限車速Vcurrent_limit及び前方道路の制限車速Vnext_limitの表示と、前方道路で制限車速が上がるのか下がるのかを示す表示を一緒に点滅表示することを開始する。図6に、その表示例を示す。図6では、制限車速が上がるのか下がるのかを矢印によって表示する場合を例示している。また点滅表示を開始すると共に一定時間ブザー音を出力し、運転者へ制限車速変化を通知する。なおつづく、ステップS40でセット/コーストSW8、リジューム/アクセラレートSW9の長押し操作を検出した場合や、車速制御自体がキャンセルされた場合には、点滅表示及びブザー出力を停止する。
【0025】
続くステップS40では、セット/コーストSW8、リジューム/アクセラレートSW9の長押し操作の検出を行ない、その検出結果に基づき、車速制御の設定速度Vsetを前方道路の制限車速Vnext_limitに変更するか否かの処理(SW操作判定処理)を行なう。この処理については後述する。
続くステップS50では、ナビゲーションシステム16で保持している地図データの中の制限車速切り替わり位置SPの補正処理を行なう。その後復帰する。このステップS50での補正処理については後述する。
【0026】
次に、上記ステップS40のSW操作判定処理の処理手順の一例を、フローチャートである図4を参照して説明する。
まず、SW操作判定処理は、ステップS400では、ステップS20で実施した、自車が制限車速変化推定範囲RS1内に存在するか否かの判定結果に基づき、自車が制限車速変化推定範囲RS1内に存在する場合には、ステップS401に進む。自車が制限車速変化推定範囲RS1外の場合には、処理を終了して復帰する。
【0027】
ステップS401では、ステップS30の処理によって、運転者へ制限車速変化の通知を示す、制限車速の点滅処理(図6参照)が行なわれているかどうかを判断する。そして、制限車速の点滅処理が行なわれている場合はステップS402に進む。制限車速の点滅処理が行われていない場合には、処理を終了して復帰する。
ステップS402では、運転者の操作によって、セット/コーストSW8が長押し操作状態にあるかどうかを判定し、セット/コーストSW8が長押し操作状態にあると判定した場合にはステップS403に進み、長押し操作状態にないと判定した場合は、ステップS407に進む。
【0028】
ステップS403では、現在の車速制御の設定速度Vsetと、制限車速が変化する前方道路の制限車速Vnext_limitとを比較し、「設定速度Vset>前方道路の制限車速Vnext_limit」の場合は、ステップS404へ進み、そうでない場合にはステップS406に進む。
ステップS404では、設定速度Vset を前方道路の制限車速Vnext_limit に変更する処理を行なう。その後、ステップS405に移行して、ステップS30で開始したナビゲーションシステム16の制限車速の点滅表示を停止し、処理を終了する。
【0029】
またステップS403で設定速度Vset ≦ 前方道路の制限車速Vnext_limitと判定されてステップSS406に移行すると、現在の設定速度Vsetを一定速度下げた値に変更する処理を行い、その後復帰する。
一方、ステップS407では、リジューム/アクセラレートSW9が運転者により長押し操作状態にあるかどうかを判定する。そして、長押し操作状態にあると判定した場合はステップS408に進み、長押し操作状態にない場合は、処理を終了して復帰する。
【0030】
ステップS408では、現在の車速制御の設定速度Vsetと、制限車速が変化する前方道路の制限車速Vnext_limitとを比較し、「設定速度Vset < 前方道路の制限車速Vnext_limit 」の場合は、ステップS409へ進み、「設定速度Vset ≧ 前方道路の制限車速Vnext_limit 」の場合は、ステップS411に進む。
ステップS409では、設定速度Vset を前方道路の制限車速Vnext_limitに変更する処理を行なう。その後、ステップS410に移行して、ステップS30で開始したナビゲーションシステム16の制限車速の点滅表示を停止し、処理を終了する。その後復帰する。
【0031】
一方、ステップS411では、設定速度Vsetを一定速度上げた値に変更する処理を行い処理を終了する。その後復帰する。
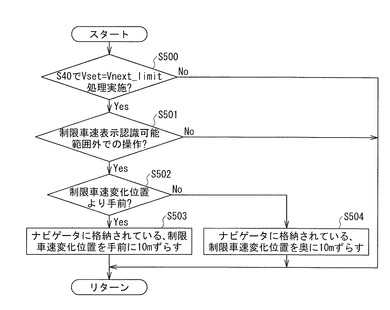
次に、ステップS50の制限車速切り替わり位置SPの補正処理手順の一例を、フローチャートである図8を参照して説明する。
まずステップS500では、ステップS40の処理によって、車速制御中の設定速度Vsetを制限車速Vcurrent_limitに適応する処理をしたかどうかを判定する。適応している場合にはステップS501に進む。一方、適応していない場合には、処理を終了して復帰する。
【0032】
ステップS501では、前記車速変更の操作が制限車速表示認識可能範囲RS0外での操作かどうかを判定する。
制限車速表示認識可能範囲RS0は、図5に示すように制限車速変化推定範囲RS1内に位置し、且つ運転者が制限車速表示認識可能な道路範囲を示す。本実施形態の制限車速表示認識可能範囲RS0は、制限車速切り替わり位置SPを中心にして、前後に予め設定した距離(図5では40m)の区画である。
【0033】
具体的にはステップS501で、ステップS40で判定したSWの長押し操作がこの制限車速表示認識可能範囲RS0の外で行なわれた場合は、ステップS502へ進み、そうでない場合には、処理を終了して復帰する。
ステップS502では、操作位置が制限車速切り替わり位置SPよりも進行方向前方か否かを判定する。そして、手前の場合にはステップS503へ進み、手前でない場合(制限車速変化地点より後ろの場合)にはステップS504に移行する。
【0034】
ステップS503では、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を手前(自車側)に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう。その後復帰する。
この位置補正(更新処理)で、例えば、手前に一定距離として10mずらすと、同じ制限車速変化地点を次回通過する際は、今回よりも10m手前で、ステップS30で実施される処理である、運転者への制限車速変化通知処理が行なわれる。
【0035】
一方、ステップS504では、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を奥側に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう。その後復帰する。
この位置補正(更新処理)で、例えば、奥に一定距離として10mずらすと、同じ制限車速変化地点を次回通過する際は、今回よりも10m奥(自車側)でステップS30で実施される処理である、運転者への制限車速変化通知処理が行なわれる。
【0036】
(動作その他)
本実施形態の車速制御は、一定速度を保って走行する車速制御とする。
そして、運転者が非車速制御中にセット/コーストSW8を操作すると、操作時点の実車速Vを設定速度Vsetに設定し、運転者がアクセル操作をしないでも設定速度Vsetで一定速度で走行するように車両の制駆動力を制御する。
また、車速制御中にセット/コーストSW8を短押し操作(短時間のSW操作)すると、設定速度Vsetを一定速度下げた車速に変更、リジューム/アクセラレートSW9を短押し操作(短時間のSW操作)すると、設定速度Vsetを一定速度上げた車速に変更し、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。
【0037】
また、車速制御中にセット/コーストSW8を長押し操作(一定時間周期以上のSW操作)すると、設定速度Vsetを一定速度下げる操作を一定時間毎に繰り返し行う。一方、レジューム/アクセラレートSW9を長押し操作(一定時間周期以上のSW操作)すると、設定速度Vsetを一定速度上げる操作を一定時間毎に繰り返し行ない、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。
更に、車速制御中に、キャンセルSW10が操作された場合は、車速制御をキャンセルする。
【0038】
以上のような車速制御を基本とするが、自車両が制限車速変化推定範囲RS1内に位置する場合には次のような処理を実施する。
すなわち、自車両が制限車速変化推定範囲RS1内に存在すると、図6に示すように、現在走行中道路の制限車速Vcurrent_limit及び前方道路の制限車速Vnext_limitの表示と、前方道路で制限車速が上がるのか下がるのかを示す表示を一緒に点滅表示することを開始する(ステップS30)。
【0039】
このとき、その自車両が制限車速変化推定範囲RS1内に入って上記点滅表示に対して、運転者がセット/コーストSW8を長押し操作したことを検知すると、次の処理を行う(ステップS402)。すなわち、「設定速度Vset>前方道路の制限車速Vnext_limit」の場合には、設定速度Vset を前方道路の制限車速Vnext_limit に変更した後に、上記制限車速の点滅表示を停止する(ステップS403,S404,S405)。一方、「設定速度Vset≦前方道路の制限車速Vnext_limit」の場合には、設定速度Vset を一定速度下げる操作を一定時間毎に繰り返し行う(ステップS406)。
【0040】
また、上記自車両が制限車速変化推定範囲RS1内に入って上記点滅表示に対して、運転者がリジューム/アクセラレートSW9を長押し操作したことを検知すると、次の処理を行う(ステップS407)。すなわち、「設定速度Vset < 前方道路の制限車速Vnext_limit 」の場合は、設定速度Vset を前方道路の制限車速Vnext_limit に変更した後、上記制限車速の点滅表示を停止する(ステップS408,S409,S410)。一方、「設定速度Vset ≧ 前方道路の制限車速Vnext_limit 」の場合は、設定速度Vset を一定速度上げる操作を一定時間毎に繰り返し行う(ステップS411)。
【0041】
以上の処理で、自車両が制限車速変化推定範囲RS1内に入ると、運転者へ前方道路で制限車速が変化することを通知する(ステップS30)。更に、前方道路の変化後の制限車速Vnext_limitが、現在走行中道路の制限車速Vcurrent_limitに対して上がる場合は、リジューム/アクセラレートSW9の長押し操作、現在走行中道路の制限車速Vcurrent_limitに対して下がる場合は、セット/コーストSW8の長押し操作により、車速制御中の設定速度Vsetを制限車速Vcurrent_limitに適性に変更することができる(ステップS40)。
【0042】
また、自車が制限車速変化推定範囲RS1内に存在するときに、リジューム/アクセラレートSW9の長押し操作又はセット/コーストSW8の長押し操作によって、設定速度Vsetを前方道路の制限車速Vnext_limitに設定変更した場合(ステップS404,S409)、次の補正処理(更新処理)を実施する。すなわち、そのリジューム/アクセラレートSW9の長押し操作又はセット/コーストSW8の長押し操作が制限車速表示認識可能範囲RS0外での操作と判定すると(S501)、操作位置が制限車速切り替わり位置SPが自車の手前か否かで次のような位置補正を行う。自車の手前と判定した場合には、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を手前に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう(S503)。一方。自車に対し奥側(後ろ側)と判定した場合には、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を奥側に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう(S504)。
【0043】
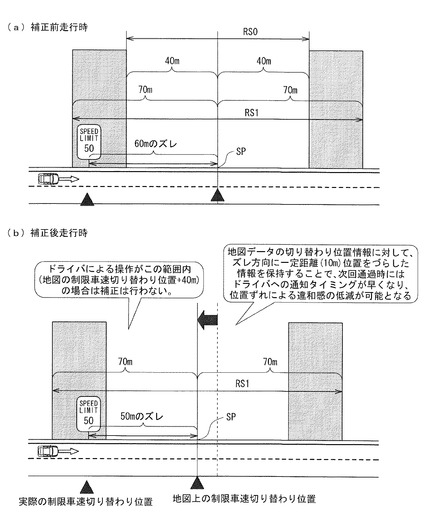
この補正処理は、図5で示すように、実際の制限車速の切り替わり位置と、ナビゲーションの地図データ内の制限車速切り替わり位置SPにズレがある場合の補正処理である。例えば図9の補正前走行時にあるように、実際の制限車速の切り替わり位置が、ナビゲーションの地図データ内の制限車速の切り替わり位置に対して60m手前にずれていた場合、ステップS40で判定する、運転者によるセット/コーストSW8、リジューム/アクセラレートSW9の長押し操作は、実際の制限車速標識を確認と同時期に実施することが通常操作と想定される。このため、ナビゲーションシステムの地図データ内の制限車速切り替わり位置SPに対して60m手前で長押し操作が行なわれたとすると、補正処理によりナビゲーションの地図データ内の制限車速切り替わり位置SPが手前(自車側)に10m補正される。そのため、同じ制限車速変化地点を次に通過した際は、ナビゲーションの地図データ内の制限車速切り替わり位置SPが、実際の制限車速切り替わり位置との誤差が50mに補正され、補正前より運転者への制限車速変化通知処理のタイミングが適切なタイミングとなる。
【0044】
図10にこの補正処理を繰り返した場合の、運転者への制限車速変化の通知タイミングと、地図上の制限車速の切り替わり位置の補正量をタイミングチャートで示す。
同じ制限車速変化地点の走行1回目で、制限車速変化推定範囲RS1内であるが、制限車速表示認識可能範囲RS0の外(図10では60m手前)で上記長押し操作が行われた場合、地図データ上の制限車速変化地点が10m手前位置に補正される(図10(b))。
【0045】
同じ制限車速変化地点の走行2回目では、地図上での制限車速変化地点が前回よりも10m手前に補正されてた結果、運転者への制限車速変化の通知タイミングに余裕が出来る。またこの際に、制限車速変化推定範囲RS1内であるが、制限車速表示認識可能範囲RS0外(図8では50m手前)で上記長押し操作が行われた場合、地図データ上の制限車速変化地点が更に10m手前位置に補正される(図10(c))。
【0046】
そして、同じ制限車速変化地点の走行3回目では、地図上での制限車速変化地点が前回よりも10m手前(一番最初からは20m手前)に補正されてた結果、運転者への制限車速変化の通知タイミングに余裕が出来る。
このように制限車速変化地点について補正処理を繰り返すことにより、いずれ実際の制限車速の切り替わり位置と、ナビゲーションの地図データ内の制限車速の切り替わり位置のずれが制限車速表示認識可能範囲RS0内となり、より違和感のない運転者への制限車速変化通知が可能となる。
【0047】
そして、以上のような構成とすることで、カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、ナビゲーションを使って安価に地図データに示された制限速度情報を更新することで、運転者の感覚にあった地図データの補正をすることができる。
ここで、上記ステップS501において、今回の長押し操作が行われたときの自車位置が、制限車速表示認識範囲外か否かを判定した。これに代えて、同一制限車速切り替わり位置SPに対して検出した過去の長押し操作時の自車位置履歴の平均値と、今回の長押し操作時の自車位置との中間地点を求め、その求めた中間地点が制限車速表示認識範囲外か否かで判定しても良い。
【0048】
このように過去履歴を加味して判定することで、補正精度を向上することができる。
また、図11に示すように、コントローラ13が画像処理部13Dを備えても良い。画像処理部13Dは、カメラ17が撮像した速度表示標識の画像処理を行い、撮像した画像から制限車速情報を読み取る。この画像処理部13Dの処理で撮像した画像から制限車速情報を読み取ることが出来、且つ速度表示標識の位置が特定できた場合は、その画像処理部13Dの処理の情報により地図データに示された制限速度切り替わり位置の情報を更新する。そして、画像処理部13Dの処理で標識位置や制限速度情報が認識できなかった場合に、上述のような操作位置情報により制限車速情報を更新するようにしても良い。
【0049】
カメラ画像の認識を利用することで、ナビゲーションシステムの地図データだけを利用するよりもより補正精度を向上することができる。又、カメラ画像も利用しても、そのカメラ画像の解像度を必ずしも高解像度とする必要もない。
ここで、セット/コーストSW8及びリジューム/アクセラレートSW9は、目標車速変更操作子を構成する。ステップS501は操作検出部を構成する。
【0050】
(本実施形態の効果)
(1)制限車速情報取得部13Caは、地図データの情報に基づき道路の制限車速情報を取得する。目標車速算出部13Aは、運転者が車速変更のために操作する目標車速変更操作子の操作情報と上記制限車速情報取得部13Caが取得した制限車速情報とに基づき目標車速を求める。制駆動制御部13Bは、目標車速算出部13Aが算出した目標車速となるように車両の制駆動力を制御する。車速制限情報更新部13Cbは、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。具体的には、上記車速制限情報更新部13Cbは、上記地図データ中の制限車速切り替わり位置SPを基準として予め設定された制限車速変化推定範囲RS1内に自車両が位置しているときに、上記目標車速変更操作子の操作を検出すると、上記更新を行う。
【0051】
ナビゲーション等が有する地図データと運転者の操作情報に基づき、地図データに示された制限速度情報を更新する。この結果、必ずしもカメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データ上の制限車速切り替わり位置SPを、運転者の感覚にあった位置に補正することができる。
そして、地図データに示された制限速度切り替わり位置の情報を道路上での位置と合わせることができ、運転者が制限速度の切り替わりについて違和感を防止できる。
また、運転者の操作による道路の制限車速情報の更新を、制限車速変化推定範囲RS1内に限定することで、補正対象となる制限車速標識を明確にでき、補正精度を高くすることができる。
【0052】
(2)操作検出部は、上記制限車速変化推定範囲RS1内且つ上記制限車速切り替わり位置を基準として予め設定された上記制限車速変化推定範囲RS1より狭い領域である制限車速表示認識可能範囲RS0の外に自車両が位置しているときに、目標車速変更操作子の操作を行なったかどうかを検出する。上記車速制限情報更新部13Cbは、操作検出部が制限車速表示認識可能範囲RS0外に自車両が位置しているときに上記操作を行ったことを検出したと判定した場合には、上記制限車速切り替わり位置SPの情報を上記操作を行なったときの自車両の位置側へ更新する。
運転者の操作による道路の制限車速情報の更新を、推定制限車速位置範囲内でもさらに運転者が制限車速表示認識可能な所定の道路範囲外で操作部材の操作を行なった場合に限定する。この結果、操作を行なった側へ一定距離補正することでより補正精度を向上させることができる。
【0053】
(3)上記車速制限情報更新部13Cbは、同一の制限車速切り替わり位置SPに対して、過去に目標車速変更操作子の操作を検出したときの自車位置である過去自車位置情報と、今回の目標車速変更操作子の操作を検出したときの今回の自車位置情報とを用いて、過去の自車位置情報の平均位置と今回の自車位置情報との中間地点を、目標車速変更操作子の操作が行われたときの自車位置として上記更新処理を行う。
過去の操作の位置履歴をも加味することで、今回の操作位置のぶれを低減できる結果、補正精度を向上できる。
【0054】
(4)車両は標識を撮影可能なカメラ17を備える。上記車速制限情報更新部13Cbは、カメラ17が撮像した画像に基づき、速度表示標識を検出し且つ当該標識に表示されている制限車速情報を認識出来た場合には、検出した速度表示標識の位置によって制限車速切り替わり位置SPの情報を更新し、上記カメラ17画像に基づき上記速度表示標識の位置を特定出来なかった場合に、上記目標車速変更操作子の操作に基づき制限車速切り替わり位置SPの情報の更新を行う。
カメラ17の撮像画像で速度表示標識の標識情報及び位置が特定出来る場合には、その情報を利用することで、操作情報及び地図データの情報だけを利用するよりもより補正精度を向上できる。
【符号の説明】
【0055】
13 コントローラ
13A 目標車速算出部
13B 制駆動制御部
13C 車速制限情報処理部
13Ca 制限車速情報取得部
13Cb 車速制限情報更新部
13D 画像処理部
16 ナビゲーションシステム
16a 表示部
17 カメラ
RS0 制限車速表示認識可能範囲
RS1 制限車速変化推定範囲
SP 制限車速切り替わり位置
8 セット/コーストSW(目標車速変更操作子)
9 リジューム/アクセラレートSW(目標車速変更操作子)
【技術分野】
【0001】
本発明は、オートクルーズ走行制御や定速走行制御などにおいて、走行道路の制限車速情報に基づき求めた目標車速となるように車両の車速を制御可能な車両の運転支援技術に関する。
【背景技術】
【0002】
道路標識に基づいた運転支援装置としては、特許文献1に記載の装置がある。この装置は、ナビゲーション装置内の地図データに設定された速度制限表示位置情報に基づいて、法定速度変化を報知或いは走行速度調整をする。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−221973号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1では、地図データの誤差により、地図上の速度制限表示位置と実際の道路上での表示位置とが異なり、運転者に違和感を与えてしまうという問題があった。
本発明は、上記のような点に着目したもので、必ずしもカメラで制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度切り替わり位置の情報を道路上での位置と合わせることで、運転者に制限車速の切り替えについて違和感を防止することを目的としている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明は、地図データの情報に基づき取得した道路の制限車速情報、及び予め設定された制限車速変化推定範囲内に自車両が位置しているときに運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき上記地図データ中の制限車速切り替わり位置の情報を更新する。
【発明の効果】
【0006】
本発明によれば、予め設定された制限車速変化推定範囲内に自車両が位置しているときに運転者が操作する目標車速変更操作子の操作に基づき地図データ中の制限車速に関する情報を更新する。このため、地図データに示された制限速度切り替わり位置の情報を道路上での位置と合わせることができ、運転者が制限速度の切り替わりについて違和感を防止できる。
【図面の簡単な説明】
【0007】
【図1】本発明に基づく実施形態に係る車両の概要構成を示す図である。
【図2】本発明に基づく実施形態に係るシステム構成を示す図である。
【図3】本発明に基づく実施形態に係るコントローラの構成例を示す図である。
【図4】本発明に基づく実施形態に係る車速制限情報処理部の処理例を示すフローチャートである。
【図5】制限車速変化指定範囲と制限車速表示認識可能範囲の例を示す図である。
【図6】本発明に基づく実施形態に係る運転者への制限車速変化通知例の表示図である。
【図7】本発明に基づく実施形態に係るSW操作判定処理の処理手順の一例を示すフローチャートである。
【図8】本発明に基づく実施形態に係る制限車速切り替わり位置の補正処理手順の一例を示すフローチャートである。
【図9】制限車速切り替わり位置の補正処理の動作説明図である。
【図10】制限車速切り替わり位置の補正処理のタイミングチャート例である。
【図11】本発明に基づく実施形態に係るコントローラの別の構成例を示す図である。
【発明を実施するための形態】
【0008】
次に、本発明の実施形態について図面を参照して説明する。
(構成)
車両1は、駆動力(駆動トルク)を発生する駆動装置、及び制動力を発生する制動装置を備える。
駆動装置は、図1に示すように、駆動源としてのエンジン20と、エンジンで発生するトルク(駆動力)を駆動力指令値に応じた値に制御するスロットルアクチュエータ11とを備える。駆動装置の駆動源は、エンジン20に限定されず、電動モータであっても良いし、エンジンとモータを組合せたハイブリッド構成であっても良い。
【0009】
制動装置は、図1に示すように、車輪23に設けられるブレーキ装置21と、その各ブレーキ装置に接続する流体圧回路22と、ブレーキアクチュエータ12とを備える。ブレーキアクチュエータ12は、上記流体圧回路22を介して各ブレーキ装置21で発生する制動力を、制動力指令値に応じた値に制御する。ブレーキ装置21は、流体圧で制動力を付与する装置に限定されず、電動ブレーキ装置等であっても良い。
【0010】
また車両は、車間距離センサ1、車速センサ2、アクセルセンサ3、スロットルセンサ4、ブレーキ液圧センサ5、及び図2に示すような各種スイッチ6〜10を備える。
車間距離センサ1は、先行車との車間距離を計測する。車間距離センサ1は、例えばレーザー距離計から構成されて、レーザービームを車両前方の左右方向に走査して先行車からの反射光を受光し、先行車との車間距離を計測する。車間距離センサ1は、電波や超音波により車間距離を計測するセンサから構成されても良い。
【0011】
車速センサ2は、車両の走行速度(車速)Vを検出するためのセンサである。車速センサ2は、例えば変速機の出力軸に取り付けられ、その回転速度に応じた周期のパルス信号を出力する。この車速パルス信号の周期またはパルス数を計測することによって、車両の走行速度(車速)Vを検出することができる。
アクセルセンサ3は、アクセルペダル(不図示)の踏み込み量accを検出する。スロットルセンサ4はスロットルバルブ開度θthを検出する。さらにブレーキ液圧センサ5はブレーキ液圧Pbrkを検出する。
【0012】
メインスイッチ6は、ONとなることで、コントローラ13や他の車速制御機器に電源を供給し、車間距離制御および車速制御の準備完了状態にする。
ブレーキスイッチ7は、ブレーキペダルの踏み込みを検出するスイッチである。このブレーキスイッチ7によりブレーキペダルの踏み込みが検出された時は、キャンセルSW操作時と同様に車速制御を解除する。
【0013】
スロットルアクチュエータ11は、バキュームポンプ、ベントバルブ、セーフティバルブなどを備える。そして、スロットルアクチュエータ11は、ポンプモータやバルブソレノイドを駆動してスロットルバルブ開度を調節し、エンジントルクすなわち車両の駆動力を制御する。
ブレーキアクチュエータ12は、負圧式ブースターを備えて、上記ブレーキアクチュエータ12を構成する。そして、ブレーキアクチュエータ12は、ブレーキ液圧を調節して車両の制動力を制御する。
【0014】
また、車両はコントローラ13及びナビゲーションシステム16を備える。
また、車両は、セット/コーストSW8、リジューム/アクセラレートSW9およびキャンセルSW10を備える。これらのSW8,9,10は、例えばステアリングホイールなどに設けられる。これらのSW8,9,10は、検出信号をコントローラ13に出力する。
【0015】
ナビゲーションシステム16は、走行中の道路の制限車速情報、前方道路の制限車速情報、制限車速が切り替わるまでの距離などの信号を取得してコントローラ13に供給する。ナビゲーションシステム16、GPS機能も有し、自車位置を検出してコントローラ13に供給する。
コントローラ13は、マイクロコンピューターとメモリなどの周辺部品から構成され、後述する制御プログラムを実行して車間距離制御、車速制御、設定速度Vsetの設定および変更処理その他を行う。なお、コントローラ13、センサ1〜5およびアクチュエータ11,12には、イグニッションキースイッチ14を介してバッテリー15から電源が供給される。
【0016】
コントローラ13は、運転支援に関わる部分の処理として、図3に示すように、目標車速算出部13A、制駆動制御部13B、車速制限情報処理部13Cを備える。車速制限情報処理部13Cは、制限車速情報取得部13Caと車速制限情報更新部13Cbとを備える。
制限車速情報取得部13Caは、ナビゲーションシステム16の地図データの情報に基づき走行道路の制限車速情報を取得する。車速制限情報更新部13Cbは、目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。ここで、本実施形態の目標車速変更操作子の操作は、車速制御中における、セット/コーストSW8又はリジューム/アクセラレートSW9の操作である。
【0017】
また、目標車速算出部13Aは、運転者が車速変更のために操作した上記目標車速変更操作子の操作情報と上記制限車速情報取得部13Caが取得した制限車速情報とに基づき目標車速を求める。制駆動制御部13Bは、目標車速算出部13Aが算出した目標車速とするための、駆動力指令値及び制動力指令値を演算し、上記スロットルアクチュエータ11及びブレーキアクチュエータ12に出力する。
【0018】
目標車速算出部13Aの処理について説明する。
目標車速算出部13Aは、セット/コーストSW8が非車速制御中に操作されることを検出すると、操作時点の実車速Vを設定速度Vsetに設定する。設定速度Vsetが目標車速となる。これによって、制駆動制御部13Bは、運転者がアクセル操作をしないでも設定速度Vsetで一定速度で走行するように車両の制駆動力を制御する。
【0019】
また、目標車速算出部13Aは、セット/コーストSW8が車速制御中に短押し操作(短時間のSW操作)されることを検出すると、設定速度Vsetを一定速度下げた車速に変更する。
目標車速算出部13Aは、リジューム/アクセラレートSW9が、車速制御中に短押し操作(短時間のSW操作)されることを検出すると、設定速度Vsetを一定速度上げた車速に変更する。これによって制駆動制御部13Bは、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。
【0020】
また、また、目標車速算出部13Aは、車速制御中にセット/コーストSW8を長押し操作(一定時間周期以上のSW操作)されることを検出すると、設定速度Vsetを一定速度下げる操作を一定時間毎に繰り返し行なう。また、目標車速算出部13Aは、リジューム/アクセラレートSW9が、車速制御中に長押し操作(一定時間周期以上のSW操作)されると、設定速度Vsetを一定速度上げる操作を一定時間毎に繰り返し行なう。これによって制駆動制御部13Bは、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。ただし、自車位置が、後述の制限車速変化推定領域内に位置する場合には、車速制御中にセット/コーストSW8を長押し操作及びリジューム/アクセラレートSW9が、車速制御中に長押し操作された際の設定速度Vsetの変更は、車速制限情報処理部13Cでの変更処理を優先する。
【0021】
目標車速算出部13Aは、車速制御中に、キャンセルSW10が操作された場合は、車速制御をキャンセルする。
また、車両は、カメラ17を備える。カメラ17は、例えば単眼カメラなどのカメラから構成される。
次に、上記コントローラ13により実行される制御プログラムのうちの、制限車速に関する情報を更新する車速制限情報処理部13Cの一例を、フローチャートである図4を参照して説明する。この更新処理は、図示せざるオペレーティングシステムで予め設定した一定の時間毎の定時割り込みで遂行される。
【0022】
上記車速制限情報処理部13Cは、まず、ステップS10では、前記各センサから各種データを読み込む。具体的には、コントローラ13は、ナビゲーションシステム16から現在走行中道路の制限車速Vcurrent_limit、前方道路の制限車速Vnext_limit、地図上で制限車速が切り替わる位置SPまでの距離Change_Distance、セット/コーストSW8、リジューム/アクセラレートSW9およびキャンセルSW10の操作情報、車速V、カメラ17の撮像情報などを読み込む。
【0023】
続くステップS20では、車両位置が制限車速変化推定範囲RS1内に存在するか否かの判定を行なう。
ここで、制限車速変化推定範囲RS1は、地図上において、当該範囲内に実際の制限車速標識が存在すると推定される範囲を示す。制限車速変化推定範囲RS1は、現在走行中道路の制限車速Vcurrent_limitと、前方道路の制限車速Vnext_limitとが異なる場合に、その制限速度の変化点(切り替わり点)である地図上での制限車速切り替わり位置SPを基準にして、その前後に予め設定した一定距離の区間を取った範囲である。本実施形態の制限車速変化推定範囲RS1は、地図上での制限車速切り替わり位置SPを中心にして、前後に予め設定した一定距離の区間を設定して決定した範囲である(図5参照)。この制限車速変化推定範囲RS1を規定する上記予め設定した一定距離は、利用するナビゲーションシステム16の地図データ精度、及びGPSを利用して自車が地図データ上のどの位置にいるかを検出するロケータ精度によって決定される。例えば、この制限車速変化推定範囲RS1を、地図上の制限車速切り替わり位置SPの前後70m(=上記予め設定した一定距離)と設定した場合(図5参照)、制限車速が切り替わるまでの距離Change_Distanceが、−70mから70mmの範囲内であると判定すると、制限車速変化推定範囲RS1に自車が存在すると判定する。
【0024】
続くステップS30では、制限車速変化通知処理を行なう。
ステップS20で制限車速変化推定範囲RS1に自車が存在すると判定され、且つ前回の割り込み遂行処理では制限車速変化推定範囲RS1に自車が存在しないと判定されていた場合は、ナビゲーションシステム16の表示部16a上に、現在走行中道路の制限車速Vcurrent_limit及び前方道路の制限車速Vnext_limitの表示と、前方道路で制限車速が上がるのか下がるのかを示す表示を一緒に点滅表示することを開始する。図6に、その表示例を示す。図6では、制限車速が上がるのか下がるのかを矢印によって表示する場合を例示している。また点滅表示を開始すると共に一定時間ブザー音を出力し、運転者へ制限車速変化を通知する。なおつづく、ステップS40でセット/コーストSW8、リジューム/アクセラレートSW9の長押し操作を検出した場合や、車速制御自体がキャンセルされた場合には、点滅表示及びブザー出力を停止する。
【0025】
続くステップS40では、セット/コーストSW8、リジューム/アクセラレートSW9の長押し操作の検出を行ない、その検出結果に基づき、車速制御の設定速度Vsetを前方道路の制限車速Vnext_limitに変更するか否かの処理(SW操作判定処理)を行なう。この処理については後述する。
続くステップS50では、ナビゲーションシステム16で保持している地図データの中の制限車速切り替わり位置SPの補正処理を行なう。その後復帰する。このステップS50での補正処理については後述する。
【0026】
次に、上記ステップS40のSW操作判定処理の処理手順の一例を、フローチャートである図4を参照して説明する。
まず、SW操作判定処理は、ステップS400では、ステップS20で実施した、自車が制限車速変化推定範囲RS1内に存在するか否かの判定結果に基づき、自車が制限車速変化推定範囲RS1内に存在する場合には、ステップS401に進む。自車が制限車速変化推定範囲RS1外の場合には、処理を終了して復帰する。
【0027】
ステップS401では、ステップS30の処理によって、運転者へ制限車速変化の通知を示す、制限車速の点滅処理(図6参照)が行なわれているかどうかを判断する。そして、制限車速の点滅処理が行なわれている場合はステップS402に進む。制限車速の点滅処理が行われていない場合には、処理を終了して復帰する。
ステップS402では、運転者の操作によって、セット/コーストSW8が長押し操作状態にあるかどうかを判定し、セット/コーストSW8が長押し操作状態にあると判定した場合にはステップS403に進み、長押し操作状態にないと判定した場合は、ステップS407に進む。
【0028】
ステップS403では、現在の車速制御の設定速度Vsetと、制限車速が変化する前方道路の制限車速Vnext_limitとを比較し、「設定速度Vset>前方道路の制限車速Vnext_limit」の場合は、ステップS404へ進み、そうでない場合にはステップS406に進む。
ステップS404では、設定速度Vset を前方道路の制限車速Vnext_limit に変更する処理を行なう。その後、ステップS405に移行して、ステップS30で開始したナビゲーションシステム16の制限車速の点滅表示を停止し、処理を終了する。
【0029】
またステップS403で設定速度Vset ≦ 前方道路の制限車速Vnext_limitと判定されてステップSS406に移行すると、現在の設定速度Vsetを一定速度下げた値に変更する処理を行い、その後復帰する。
一方、ステップS407では、リジューム/アクセラレートSW9が運転者により長押し操作状態にあるかどうかを判定する。そして、長押し操作状態にあると判定した場合はステップS408に進み、長押し操作状態にない場合は、処理を終了して復帰する。
【0030】
ステップS408では、現在の車速制御の設定速度Vsetと、制限車速が変化する前方道路の制限車速Vnext_limitとを比較し、「設定速度Vset < 前方道路の制限車速Vnext_limit 」の場合は、ステップS409へ進み、「設定速度Vset ≧ 前方道路の制限車速Vnext_limit 」の場合は、ステップS411に進む。
ステップS409では、設定速度Vset を前方道路の制限車速Vnext_limitに変更する処理を行なう。その後、ステップS410に移行して、ステップS30で開始したナビゲーションシステム16の制限車速の点滅表示を停止し、処理を終了する。その後復帰する。
【0031】
一方、ステップS411では、設定速度Vsetを一定速度上げた値に変更する処理を行い処理を終了する。その後復帰する。
次に、ステップS50の制限車速切り替わり位置SPの補正処理手順の一例を、フローチャートである図8を参照して説明する。
まずステップS500では、ステップS40の処理によって、車速制御中の設定速度Vsetを制限車速Vcurrent_limitに適応する処理をしたかどうかを判定する。適応している場合にはステップS501に進む。一方、適応していない場合には、処理を終了して復帰する。
【0032】
ステップS501では、前記車速変更の操作が制限車速表示認識可能範囲RS0外での操作かどうかを判定する。
制限車速表示認識可能範囲RS0は、図5に示すように制限車速変化推定範囲RS1内に位置し、且つ運転者が制限車速表示認識可能な道路範囲を示す。本実施形態の制限車速表示認識可能範囲RS0は、制限車速切り替わり位置SPを中心にして、前後に予め設定した距離(図5では40m)の区画である。
【0033】
具体的にはステップS501で、ステップS40で判定したSWの長押し操作がこの制限車速表示認識可能範囲RS0の外で行なわれた場合は、ステップS502へ進み、そうでない場合には、処理を終了して復帰する。
ステップS502では、操作位置が制限車速切り替わり位置SPよりも進行方向前方か否かを判定する。そして、手前の場合にはステップS503へ進み、手前でない場合(制限車速変化地点より後ろの場合)にはステップS504に移行する。
【0034】
ステップS503では、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を手前(自車側)に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう。その後復帰する。
この位置補正(更新処理)で、例えば、手前に一定距離として10mずらすと、同じ制限車速変化地点を次回通過する際は、今回よりも10m手前で、ステップS30で実施される処理である、運転者への制限車速変化通知処理が行なわれる。
【0035】
一方、ステップS504では、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を奥側に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう。その後復帰する。
この位置補正(更新処理)で、例えば、奥に一定距離として10mずらすと、同じ制限車速変化地点を次回通過する際は、今回よりも10m奥(自車側)でステップS30で実施される処理である、運転者への制限車速変化通知処理が行なわれる。
【0036】
(動作その他)
本実施形態の車速制御は、一定速度を保って走行する車速制御とする。
そして、運転者が非車速制御中にセット/コーストSW8を操作すると、操作時点の実車速Vを設定速度Vsetに設定し、運転者がアクセル操作をしないでも設定速度Vsetで一定速度で走行するように車両の制駆動力を制御する。
また、車速制御中にセット/コーストSW8を短押し操作(短時間のSW操作)すると、設定速度Vsetを一定速度下げた車速に変更、リジューム/アクセラレートSW9を短押し操作(短時間のSW操作)すると、設定速度Vsetを一定速度上げた車速に変更し、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。
【0037】
また、車速制御中にセット/コーストSW8を長押し操作(一定時間周期以上のSW操作)すると、設定速度Vsetを一定速度下げる操作を一定時間毎に繰り返し行う。一方、レジューム/アクセラレートSW9を長押し操作(一定時間周期以上のSW操作)すると、設定速度Vsetを一定速度上げる操作を一定時間毎に繰り返し行ない、変更後の設定速度Vsetになるように、車両の制駆動力を制御する。
更に、車速制御中に、キャンセルSW10が操作された場合は、車速制御をキャンセルする。
【0038】
以上のような車速制御を基本とするが、自車両が制限車速変化推定範囲RS1内に位置する場合には次のような処理を実施する。
すなわち、自車両が制限車速変化推定範囲RS1内に存在すると、図6に示すように、現在走行中道路の制限車速Vcurrent_limit及び前方道路の制限車速Vnext_limitの表示と、前方道路で制限車速が上がるのか下がるのかを示す表示を一緒に点滅表示することを開始する(ステップS30)。
【0039】
このとき、その自車両が制限車速変化推定範囲RS1内に入って上記点滅表示に対して、運転者がセット/コーストSW8を長押し操作したことを検知すると、次の処理を行う(ステップS402)。すなわち、「設定速度Vset>前方道路の制限車速Vnext_limit」の場合には、設定速度Vset を前方道路の制限車速Vnext_limit に変更した後に、上記制限車速の点滅表示を停止する(ステップS403,S404,S405)。一方、「設定速度Vset≦前方道路の制限車速Vnext_limit」の場合には、設定速度Vset を一定速度下げる操作を一定時間毎に繰り返し行う(ステップS406)。
【0040】
また、上記自車両が制限車速変化推定範囲RS1内に入って上記点滅表示に対して、運転者がリジューム/アクセラレートSW9を長押し操作したことを検知すると、次の処理を行う(ステップS407)。すなわち、「設定速度Vset < 前方道路の制限車速Vnext_limit 」の場合は、設定速度Vset を前方道路の制限車速Vnext_limit に変更した後、上記制限車速の点滅表示を停止する(ステップS408,S409,S410)。一方、「設定速度Vset ≧ 前方道路の制限車速Vnext_limit 」の場合は、設定速度Vset を一定速度上げる操作を一定時間毎に繰り返し行う(ステップS411)。
【0041】
以上の処理で、自車両が制限車速変化推定範囲RS1内に入ると、運転者へ前方道路で制限車速が変化することを通知する(ステップS30)。更に、前方道路の変化後の制限車速Vnext_limitが、現在走行中道路の制限車速Vcurrent_limitに対して上がる場合は、リジューム/アクセラレートSW9の長押し操作、現在走行中道路の制限車速Vcurrent_limitに対して下がる場合は、セット/コーストSW8の長押し操作により、車速制御中の設定速度Vsetを制限車速Vcurrent_limitに適性に変更することができる(ステップS40)。
【0042】
また、自車が制限車速変化推定範囲RS1内に存在するときに、リジューム/アクセラレートSW9の長押し操作又はセット/コーストSW8の長押し操作によって、設定速度Vsetを前方道路の制限車速Vnext_limitに設定変更した場合(ステップS404,S409)、次の補正処理(更新処理)を実施する。すなわち、そのリジューム/アクセラレートSW9の長押し操作又はセット/コーストSW8の長押し操作が制限車速表示認識可能範囲RS0外での操作と判定すると(S501)、操作位置が制限車速切り替わり位置SPが自車の手前か否かで次のような位置補正を行う。自車の手前と判定した場合には、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を手前に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう(S503)。一方。自車に対し奥側(後ろ側)と判定した場合には、ナビデータシステムの地図データに格納されている、制限車速切り替わり位置SPの情報を奥側に予め設定した一定距離ずらすことで、位置補正つまり更新処理を行なう(S504)。
【0043】
この補正処理は、図5で示すように、実際の制限車速の切り替わり位置と、ナビゲーションの地図データ内の制限車速切り替わり位置SPにズレがある場合の補正処理である。例えば図9の補正前走行時にあるように、実際の制限車速の切り替わり位置が、ナビゲーションの地図データ内の制限車速の切り替わり位置に対して60m手前にずれていた場合、ステップS40で判定する、運転者によるセット/コーストSW8、リジューム/アクセラレートSW9の長押し操作は、実際の制限車速標識を確認と同時期に実施することが通常操作と想定される。このため、ナビゲーションシステムの地図データ内の制限車速切り替わり位置SPに対して60m手前で長押し操作が行なわれたとすると、補正処理によりナビゲーションの地図データ内の制限車速切り替わり位置SPが手前(自車側)に10m補正される。そのため、同じ制限車速変化地点を次に通過した際は、ナビゲーションの地図データ内の制限車速切り替わり位置SPが、実際の制限車速切り替わり位置との誤差が50mに補正され、補正前より運転者への制限車速変化通知処理のタイミングが適切なタイミングとなる。
【0044】
図10にこの補正処理を繰り返した場合の、運転者への制限車速変化の通知タイミングと、地図上の制限車速の切り替わり位置の補正量をタイミングチャートで示す。
同じ制限車速変化地点の走行1回目で、制限車速変化推定範囲RS1内であるが、制限車速表示認識可能範囲RS0の外(図10では60m手前)で上記長押し操作が行われた場合、地図データ上の制限車速変化地点が10m手前位置に補正される(図10(b))。
【0045】
同じ制限車速変化地点の走行2回目では、地図上での制限車速変化地点が前回よりも10m手前に補正されてた結果、運転者への制限車速変化の通知タイミングに余裕が出来る。またこの際に、制限車速変化推定範囲RS1内であるが、制限車速表示認識可能範囲RS0外(図8では50m手前)で上記長押し操作が行われた場合、地図データ上の制限車速変化地点が更に10m手前位置に補正される(図10(c))。
【0046】
そして、同じ制限車速変化地点の走行3回目では、地図上での制限車速変化地点が前回よりも10m手前(一番最初からは20m手前)に補正されてた結果、運転者への制限車速変化の通知タイミングに余裕が出来る。
このように制限車速変化地点について補正処理を繰り返すことにより、いずれ実際の制限車速の切り替わり位置と、ナビゲーションの地図データ内の制限車速の切り替わり位置のずれが制限車速表示認識可能範囲RS0内となり、より違和感のない運転者への制限車速変化通知が可能となる。
【0047】
そして、以上のような構成とすることで、カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、ナビゲーションを使って安価に地図データに示された制限速度情報を更新することで、運転者の感覚にあった地図データの補正をすることができる。
ここで、上記ステップS501において、今回の長押し操作が行われたときの自車位置が、制限車速表示認識範囲外か否かを判定した。これに代えて、同一制限車速切り替わり位置SPに対して検出した過去の長押し操作時の自車位置履歴の平均値と、今回の長押し操作時の自車位置との中間地点を求め、その求めた中間地点が制限車速表示認識範囲外か否かで判定しても良い。
【0048】
このように過去履歴を加味して判定することで、補正精度を向上することができる。
また、図11に示すように、コントローラ13が画像処理部13Dを備えても良い。画像処理部13Dは、カメラ17が撮像した速度表示標識の画像処理を行い、撮像した画像から制限車速情報を読み取る。この画像処理部13Dの処理で撮像した画像から制限車速情報を読み取ることが出来、且つ速度表示標識の位置が特定できた場合は、その画像処理部13Dの処理の情報により地図データに示された制限速度切り替わり位置の情報を更新する。そして、画像処理部13Dの処理で標識位置や制限速度情報が認識できなかった場合に、上述のような操作位置情報により制限車速情報を更新するようにしても良い。
【0049】
カメラ画像の認識を利用することで、ナビゲーションシステムの地図データだけを利用するよりもより補正精度を向上することができる。又、カメラ画像も利用しても、そのカメラ画像の解像度を必ずしも高解像度とする必要もない。
ここで、セット/コーストSW8及びリジューム/アクセラレートSW9は、目標車速変更操作子を構成する。ステップS501は操作検出部を構成する。
【0050】
(本実施形態の効果)
(1)制限車速情報取得部13Caは、地図データの情報に基づき道路の制限車速情報を取得する。目標車速算出部13Aは、運転者が車速変更のために操作する目標車速変更操作子の操作情報と上記制限車速情報取得部13Caが取得した制限車速情報とに基づき目標車速を求める。制駆動制御部13Bは、目標車速算出部13Aが算出した目標車速となるように車両の制駆動力を制御する。車速制限情報更新部13Cbは、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。具体的には、上記車速制限情報更新部13Cbは、上記地図データ中の制限車速切り替わり位置SPを基準として予め設定された制限車速変化推定範囲RS1内に自車両が位置しているときに、上記目標車速変更操作子の操作を検出すると、上記更新を行う。
【0051】
ナビゲーション等が有する地図データと運転者の操作情報に基づき、地図データに示された制限速度情報を更新する。この結果、必ずしもカメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データ上の制限車速切り替わり位置SPを、運転者の感覚にあった位置に補正することができる。
そして、地図データに示された制限速度切り替わり位置の情報を道路上での位置と合わせることができ、運転者が制限速度の切り替わりについて違和感を防止できる。
また、運転者の操作による道路の制限車速情報の更新を、制限車速変化推定範囲RS1内に限定することで、補正対象となる制限車速標識を明確にでき、補正精度を高くすることができる。
【0052】
(2)操作検出部は、上記制限車速変化推定範囲RS1内且つ上記制限車速切り替わり位置を基準として予め設定された上記制限車速変化推定範囲RS1より狭い領域である制限車速表示認識可能範囲RS0の外に自車両が位置しているときに、目標車速変更操作子の操作を行なったかどうかを検出する。上記車速制限情報更新部13Cbは、操作検出部が制限車速表示認識可能範囲RS0外に自車両が位置しているときに上記操作を行ったことを検出したと判定した場合には、上記制限車速切り替わり位置SPの情報を上記操作を行なったときの自車両の位置側へ更新する。
運転者の操作による道路の制限車速情報の更新を、推定制限車速位置範囲内でもさらに運転者が制限車速表示認識可能な所定の道路範囲外で操作部材の操作を行なった場合に限定する。この結果、操作を行なった側へ一定距離補正することでより補正精度を向上させることができる。
【0053】
(3)上記車速制限情報更新部13Cbは、同一の制限車速切り替わり位置SPに対して、過去に目標車速変更操作子の操作を検出したときの自車位置である過去自車位置情報と、今回の目標車速変更操作子の操作を検出したときの今回の自車位置情報とを用いて、過去の自車位置情報の平均位置と今回の自車位置情報との中間地点を、目標車速変更操作子の操作が行われたときの自車位置として上記更新処理を行う。
過去の操作の位置履歴をも加味することで、今回の操作位置のぶれを低減できる結果、補正精度を向上できる。
【0054】
(4)車両は標識を撮影可能なカメラ17を備える。上記車速制限情報更新部13Cbは、カメラ17が撮像した画像に基づき、速度表示標識を検出し且つ当該標識に表示されている制限車速情報を認識出来た場合には、検出した速度表示標識の位置によって制限車速切り替わり位置SPの情報を更新し、上記カメラ17画像に基づき上記速度表示標識の位置を特定出来なかった場合に、上記目標車速変更操作子の操作に基づき制限車速切り替わり位置SPの情報の更新を行う。
カメラ17の撮像画像で速度表示標識の標識情報及び位置が特定出来る場合には、その情報を利用することで、操作情報及び地図データの情報だけを利用するよりもより補正精度を向上できる。
【符号の説明】
【0055】
13 コントローラ
13A 目標車速算出部
13B 制駆動制御部
13C 車速制限情報処理部
13Ca 制限車速情報取得部
13Cb 車速制限情報更新部
13D 画像処理部
16 ナビゲーションシステム
16a 表示部
17 カメラ
RS0 制限車速表示認識可能範囲
RS1 制限車速変化推定範囲
SP 制限車速切り替わり位置
8 セット/コーストSW(目標車速変更操作子)
9 リジューム/アクセラレートSW(目標車速変更操作子)
【特許請求の範囲】
【請求項1】
地図データの情報に基づき道路の制限車速情報を取得する制限車速情報取得部と、
運転者が車速変更のために操作する目標車速変更操作子の操作情報と上記制限車速情報取得部が取得した制限車速情報とに基づき目標車速を求める目標車速算出部と、
上記地図データ中の制限車速切り替わり位置を基準として予め設定された制限車速変化推定範囲内に自車両が位置しているときに、上記目標車速変更操作子の操作検出により、上記地図データ中の制限車速切り替わり位置の情報を更新する車速制限情報更新部と、
を備えることを特徴とする運転支援装置。
【請求項2】
上記制限車速変化推定範囲内且つ上記制限車速切り替わり位置を基準として予め設定された上記制限車速変化推定範囲より狭い領域である制限車速表示認識可能範囲の外に自車両が位置しているときに、目標車速変更操作子の操作を行なったかどうかを検出する操作検出部を備え、
上記車速制限情報更新部は、操作検出部が制限車速表示認識可能範囲外に自車両が位置しているときに上記操作を行ったことを検出したと判定した場合には、上記制限車速切り替わり位置の情報を上記操作を行なったときの自車両の位置側へ更新することを特徴とする請求項1に記載した運転支援装置。
【請求項3】
上記車速制限情報更新部は、同一の制限車速切り替わり位置に対して、過去に目標車速変更操作子の操作を検出したときの自車位置である過去自車位置情報と、今回の目標車速変更操作子の操作を検出したときの今回自車位置情報とを用いて、過去の自車位置の平均位置と今回の自車位置との中間地点を、目標車速変更操作子の操作が行われたときの自車位置として上記更新処理を行うことを特徴とする請求項1又は2に記載した運転支援装置。
【請求項4】
標識を撮影可能なカメラを備え、
上記車速制限情報更新部は、カメラが撮像した画像に基づき、速度表示標識を検出し且つ当該標識に表示されている制限車速情報を認識出来た場合には、検出した速度表示標識の位置によって制限車速切り替わり位置の情報を更新し、上記カメラ画像に基づき上記速度表示標識の位置を特定出来なかった場合に、上記目標車速変更操作子の操作に基づき制限車速切り替わり位置の情報の更新を行うことを特徴とする請求項1〜3のいずれか1項に記載した運転支援装置。
【請求項5】
地図データの情報に基づき取得した道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、上記地図データ中の制限車速切り替わり位置を基準として予め設定された制限車速変化推定範囲内に自車両が位置しているときに、上記目標車速変更操作子の操作検出により、上記地図データ中の制限車速切り替わり位置の情報を更新することを特徴とする運転支援方法。
【請求項1】
地図データの情報に基づき道路の制限車速情報を取得する制限車速情報取得部と、
運転者が車速変更のために操作する目標車速変更操作子の操作情報と上記制限車速情報取得部が取得した制限車速情報とに基づき目標車速を求める目標車速算出部と、
上記地図データ中の制限車速切り替わり位置を基準として予め設定された制限車速変化推定範囲内に自車両が位置しているときに、上記目標車速変更操作子の操作検出により、上記地図データ中の制限車速切り替わり位置の情報を更新する車速制限情報更新部と、
を備えることを特徴とする運転支援装置。
【請求項2】
上記制限車速変化推定範囲内且つ上記制限車速切り替わり位置を基準として予め設定された上記制限車速変化推定範囲より狭い領域である制限車速表示認識可能範囲の外に自車両が位置しているときに、目標車速変更操作子の操作を行なったかどうかを検出する操作検出部を備え、
上記車速制限情報更新部は、操作検出部が制限車速表示認識可能範囲外に自車両が位置しているときに上記操作を行ったことを検出したと判定した場合には、上記制限車速切り替わり位置の情報を上記操作を行なったときの自車両の位置側へ更新することを特徴とする請求項1に記載した運転支援装置。
【請求項3】
上記車速制限情報更新部は、同一の制限車速切り替わり位置に対して、過去に目標車速変更操作子の操作を検出したときの自車位置である過去自車位置情報と、今回の目標車速変更操作子の操作を検出したときの今回自車位置情報とを用いて、過去の自車位置の平均位置と今回の自車位置との中間地点を、目標車速変更操作子の操作が行われたときの自車位置として上記更新処理を行うことを特徴とする請求項1又は2に記載した運転支援装置。
【請求項4】
標識を撮影可能なカメラを備え、
上記車速制限情報更新部は、カメラが撮像した画像に基づき、速度表示標識を検出し且つ当該標識に表示されている制限車速情報を認識出来た場合には、検出した速度表示標識の位置によって制限車速切り替わり位置の情報を更新し、上記カメラ画像に基づき上記速度表示標識の位置を特定出来なかった場合に、上記目標車速変更操作子の操作に基づき制限車速切り替わり位置の情報の更新を行うことを特徴とする請求項1〜3のいずれか1項に記載した運転支援装置。
【請求項5】
地図データの情報に基づき取得した道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、上記地図データ中の制限車速切り替わり位置を基準として予め設定された制限車速変化推定範囲内に自車両が位置しているときに、上記目標車速変更操作子の操作検出により、上記地図データ中の制限車速切り替わり位置の情報を更新することを特徴とする運転支援方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−224247(P2012−224247A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94342(P2011−94342)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]