
運転支援装置
【課題】衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにする。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置に関し、詳しくは注意喚起のタイミングの改善に関する。
【背景技術】
【0002】
近年、車車間通信による安全運転支援システムの研究・開発が進められ、その1つとして、運転支援装置により、他車両(いわゆる自動車だけでなく二輪車等も含む)との車車間通信に基づき、衝突可能性がある他車両の接近に対し、衝突予測時点よりTTC(Time to Collision:衝突余裕時間)前から注意喚起や警報を行なうことが考えられている。そして、この注意喚起に基づいて自車両が減速や停止をすることにより、例えば信号機のない交差点を左折する場合に、自車両の右側から直進して接近してくる他車両との出会い頭の衝突を回避することができ、安全運転に寄与する。
【0003】
ところで、前記TTCは、自車両と他車両の距離(相対距離)を両者の相対速度で除算した車間時間であり、従来、一般的な人間行動特性を基準にして例えば3.2秒に設定される。
【0004】
一方、自車両と先行車両等の警報対象物との衝突可能性を喚起音でドライバに注意喚起する車両用警報装置において、ブレーキペダル踏み遅れ時間とブレーキペダル踏み込み速度とに基づいて喚起音を出力するタイミングを制御し、ドライバのブレーキペダル操作特性(ブレーキ操作の癖)を考慮して反応時間が比較的長い傾向にあるドライバに対する喚起音の出力タイミングを、通常の反応時間を考慮したタイミングより早くすることが提案されている(例えば、特許文献1(要約書、段落[0014]、[0024]、図2等)参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−182325号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来の運転支援装置は、前記したようにドライバによらずTTCを一定時間に設定して注意喚起を行なう。この場合、ブレーキペダル操作特性等の運転行動の特性がドライバによって異なることから、ドライバによっては最適なタイミングの注意喚起とならない可能性がある。例えば、自車両が信号機のない交差点を左折する場合に、注意喚起に基づく自車両の減速や停止が遅れ、接近する他車両に、衝突しそうになってドライバがはっとする事態、すなわち、ヒヤリハットが発生し、他車両のドライバに衝突回避のブレーキやハンドルの操作等を行なわせてしまう可能性がある。なお、他車両との車車間通信を行なう代わりに、自車両の測距レーダや撮影手段(単眼カメラ等)のような自律センサの情報から他車両の走行状態の情報を得て注意喚起を行なう場合にも同様の問題がある。
【0007】
また、特許文献1に記載のようにドライバのブレーキペダル操作特性に応じて注意喚起のタイミングを早めるようにするだけでは、他車両にヒヤリハットが発生しない運転を行なうドライバに対しても、早められたタイミングで注意喚起が行なわれる可能性があり、この場合、不必要に注意喚起のタイミングが早められることにより、ドライバは何の注意喚起なのかわからず、注意喚起が意味をなさなくなる可能性がある。
【0008】
さらに、ドライバのプレーキペダル操作特性等の運転行動の特性は、交差点での右左折や直進等の走行場面(シーン)によって異なるが、従来の運転支援装置にあっては、そのような走行場面の別も考慮した最適な注意喚起は全く提案されていない。
【0009】
すなわち、衝突可能性がある他車両の接近に対して注意喚起を行なう従来のこの種の運転支援装置においては、ドライバの運転行動の特性、さらには走行場面を考慮して、個々のドライバに応じた最適なタイミングで注意喚起が行なえない問題がある。
【0010】
本発明は、衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにすることを目的とする。
【課題を解決するための手段】
【0011】
上記した目的を達成するために、本発明の運転支援装置は、衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置であって、衝突可能性があって自車両に接近する他車両のヒヤリハットの発生を検出する検出手段と、前記検出手段の検出に基づいて次回の注意喚起のタイミングを補正するタイミング補正手段と、前記タイミング補正手段により補正されたタイミングで注意喚起を行なう注意喚起手段とを備えたことを特徴としている(請求項1)。
【0012】
また、本発明の運転支援装置の前記検出手段は、衝突可能性があって自車両に接近する他車両の運転状態の情報から前記ヒヤリハットの発生を検出することを特徴としている(請求項2)。
【0013】
また、本発明の運転支援装置の前記タイミング補正手段は、前記検出手段が前記ヒヤリハットの発生を検出することにより注意喚起のタイミングを早めるように補正することを特徴としている(請求項3)。
【0014】
さらに、本発明の運転支援装置の注意喚起手段は、自車両と衝突可能性がある他車両との走行関係に基づき、該当する走行関係の注意喚起の補正されたタイミングにしたがって注意喚起を行うことを特徴としている(請求項4)。
【発明の効果】
【0015】
請求項1の発明の場合、例えば自車両が信号機のない交差点を左折する際、自車両の右側から直進して接近する他車両は衝突可能性があって自車両に接近する他車両であり、このような他車両について、検出手段による他車両のヒヤリハットの発生の検出に基づき、タイミング補正手段が注意喚起のタイミングを学習して補正し、注意喚起手段が補正されたタイミングで注意喚起を行なう。
【0016】
この場合、自車両の運転行動に対する他車両のヒヤリハットの発生状況から学習して注意喚起のタイミングを補正するため、注意喚起のタイミングを自動的に的確に自車両のドライバの運転行動の特性に応じた最適なタイミングにすることができ、補正されたタイミングの注意喚起により、他車両から客観的にみても自車両が危険な運転行動(例えば他車両が接近しているのに飛び出そうとするような運転行動)をとらないようにすることができ、自車両および他車両の安全性が向上する。
【0017】
請求項2の発明の場合、検出手段により、衝突可能性があって接近する他車両の運転状態の情報からヒヤリハットの発生を確実に検出し、この検出に基づいて注意喚起のタイミングを補正することができる。そのため、ヒヤリハットの発生の誤検出がなく、補正の信頼性が向上して安全性が一層向上する。
【0018】
また、請求項3の発明の場合、検出手段による他車両のヒヤリハットの発生の検出に基づき、タイミング補正手段が注意喚起のタイミングを早める補正を行なうため、とくに、注意喚起に対してブレーキペダル操作やハンドル操作を行うまでに時間がかかるドライバに対して、注意喚起のタイミングを的確にそのドライバの最適なタイミング(早めのタイミング)にできる。
【0019】
さらに、請求項4の発明の場合、自車両と、衝突可能性があって接近する他車両との走行関係に基づき、注意喚起手段により、走行場面も考慮して補正されたタイミングで注意喚起を行うことができる。
【0020】
したがって、一層的確にドライバの運転行動の特性に最適なタイミングに補正された注意喚起を行なうことができ、安全性が一層向上する。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態の運転支援装置のブロック図である。
【図2】図1の自車両の走行場面の一例の説明図である。
【図3】図1の自車両の走行場面の他の例の説明図である。
【図4】図1の記憶部の注意喚起のタイミング例の説明図である。
【図5】図1の動作説明用のフローチャートである。
【発明を実施するための形態】
【0022】
つぎに、本発明をより詳細に説明するため、一実施形態について、図1〜図5を参照して詳述する。
【0023】
まず、図2、図3により、注意喚起が必要になる走行場面の例を説明する。
【0024】
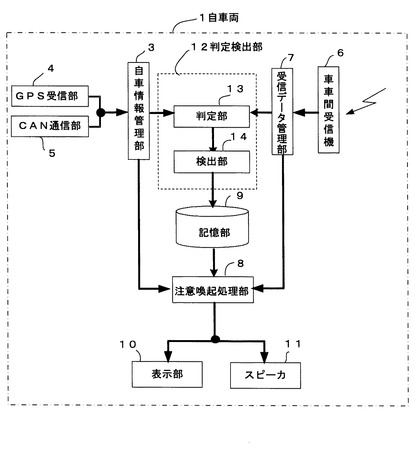
図2は交差点での出会い頭の衝突の可能性がある走行場面であり、紙面の下側の走行路R1が左右の走行路R2と交差する信号機のないT字路の交差点Iaの部分を示す。
【0025】
そして、走行路R1の黒塗り三角形の自車両1が実線矢印aに示すように交差点Iaで左折する場合、走行路R2の交差点Iaの付近を走行中の白抜き三角形の他車両21、22は自車両1と車車間通信可能であり、そのうちの他車両21は実線矢印bに示すように、左折後の自車両1の走行路R2を自車両1と同じ方向(紙面の右から左)に走行するので衝突可能性があり、しかも、他車両21は自車両1に接近しつつある。したがって、他車両21は衝突可能性があって自車両1に接近する車両であり、注意喚起が必要な車両である。なお、他車両22は、自車両1に接近しつつあるが、実線矢印cに示すように左折後の自車両1とは逆方向に走行しているので、自車両1と進路が交差することはなく、衝突可能性はない。
【0026】
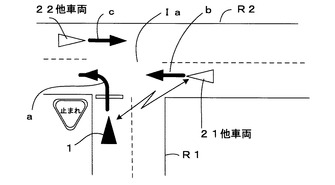
図3は交差点での巻き込みの衝突の可能性がある走行場面であり、紙面上下方向の走行路R3と紙面左右方向の走行路R4が交差する信号機のない十字路の交差点Ibの部分を示す。
【0027】
そして、交差点Ibの手前(紙面下側)の走行路R3を走行中の黒塗り三角形の自車両1が実線矢印dに示すように交差点Ibで左折する際、交差点Ibの手前の走行路R3を白抜き三角形の他車両(例えば二輪車)23が自車両1に接近しつつ走行し、この他車両23が実線矢印eに示すように交差点Ibを直進又は左折するものとすると、他車両23の進路は自車両1の左折の進路と交差し、他車両23は衝突可能性がある。したがって、他車両23は、衝突可能性があって自車両1に接近する車両であり、注意喚起が必要な車両である。
【0028】
そして、交差点Ia、Ibに接近した自車両1および他車両21〜23は、周知の車車間通信で相互に位置、速度、加減速度、ブレーキのオン/オフ、操舵等の走行状態の情報をやり取りする。自車両1は、自車両1の走行状態の情報と、取得した他車両21〜23の走行状態の情報とに基づき、マイクロコンピュータ構成の運転支援装置のソフトウェア処理により、自車1および他車両21〜23の走行を予測し、この予測から衝突可能性がある他車両21、23を検出し、さらに、検出した車両21、23が自車両1に接近していると、設定されたTTCに基づき、自車両1と他車両21、23との進路が交差する衝突予測タイミングよりTCCだけ前のタイミングから注意喚起を行なう。また、後述するように前記運転支援装置は注意喚起のタイミングの必要な補正を行なう。
【0029】
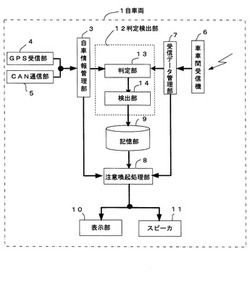
図1は自車両1の上記運転支援装置の一部の構成を示し、図1において、3は自車情報管理部であり、例えばGPS受信部4により受信したGPSの測位情報(自車位置の情報)および、CAN(Controller Area Network)通信部5により受信した速度センサ、ブレーキセンサ、舵角センサ、ヨーレートセンサ等の自車内の走行に関連する各種自律センサの検出情報や方向指示器等の情報から、自車両1の最新の位置、速度、加減速度、ブレーキのオン/オフ、操舵方向、右左折等の走行状態の情報(データ)を取得して管理する。なお、自車両1が自車前方を探査する測距レーダや周囲を撮影するカメラ(単眼カメラ等)も備える場合、自車情報管理部3は測距レーダの測距情報(車間距離情報)やカメラの撮影画像情報も走行状態の情報として管理する。
【0030】
6は車車間受信機であり、前記した一定の距離範囲内にある他車両21〜23から車車間通信で送信された各種の情報を受信する。7は受信データ管理部であり、車車間受信機6が受信した情報から、他車両21〜23の最新の位置、速度、加減速度、ブレーキのオン/オフ、操舵方向、右左折等の走行状態の情報を取得して管理する。
【0031】
8は注意喚起処理部であり、自車情報管理部3の自車両1の時々刻々の走行状態の情報(データ)と、受信データ管理部7の他車両21〜23の時々刻々の走行状態の情報とに基づき、例えば、自車両1および他車両21〜23の進路予想を行い、他車両21〜23の進路(走行予測軌跡)が自車両1の進路と交差する場合には衝突可能性があると判断する。さらに、衝突可能性があると判断した他車両のうちの自車両1との相対距離が短くなって自車両1に接近しつつある他車両21、23を注意喚起が必要な車両として検出する。
【0032】
つぎに、注意喚起処理部8は、自車両1と他車両21、23の相対距離および相対速度から求められる時々刻々のTTCが、記憶部9に注意喚起のタイミングとして保持されたTTCの設定時間Tsetになり、注意喚起のタイミングになると、表示部10に注意喚起のメッセージ、図形等を表示し、スピーカ11から注意喚起のメッセージ音声あるいは喚起音を出力し、注意喚起を行なう。なお、注意喚起のタイミング(実際には設定時間Tset)は、記憶部9のフラッシュメモリ等の書換え自在の不揮発性メモリ(図示せず)に保持される。
【0033】
表示部10、スピーカ11は本発明の注意喚起手段を形成し、表示部10は例えば自車両1のダッシュボードのメータ表示パネルに設けられ、スピーカ11は自車両1の車室内の適当な位置に取り付けられている。
【0034】
そして、設定時間Tsetは、最初は標準の時間(例えば3.2秒)に設定されるが、つぎに説明するように、衝突可能性があって自車両1に接近し、注意喚起が必要な他車両21、23のヒヤリハットの検出に基づいて、注意喚起のタイミングがドライバの最適なタイミングになるように補正される。
【0035】
図1の12はヒヤリハットの判定検出部であり、判定部13と検出部14を備える。
【0036】
そして、本実施形態の場合、注意喚起が行なわれて自車両1が左折等する際に、車車間通信で取得した注意喚起が必要な他車両21、23の運転状態の情報に基づき、他車両21、23のヒヤリハットの発生を自車両1側で判定して検出するため、判定部13は、注意喚起処理部8からの通知、または、車両自車情報管理部3および受信データ管理部7が管理する情報に基づく注意喚起処理部8と同様の進路予測により、注意喚起が必要な他車両21、23を認識し、車両自車情報管理部3および受信データ管理部7が管理する情報に基づいて他車両21、23の走行状態を追跡する。
【0037】
さらに、判定部13は、例えば図2、図3に示したように自車両1が左折等する際、他車両21、23の位置、速度、加減速度、操舵方向の一定以上の変化やブレーキのオン等から、他車両21、23のドライバが衝突回避の操作を行なったか否かを判定し、それらの操作が行われて他車両21、23にヒヤリハットが発生したと判定すると、判定結果と共に、そのときの自車両1と他車両21、23の走行状態の情報を検出部(本発明の検出手段)14に送る。
【0038】
すなわち、自車両1のドライバに設定時間Tsetに基づくタイミングで注意喚起をしたにもかかわらず、衝突可能性があって自車両1に接近する他車両21、23にヒヤリハットが発生し、他車両21、23のドライバが衝突回避行動をとったときには、判定部13は、自車両1の運転行動が危険であったと判断し、注意喚起のタイミングを早める必要があると学習して、ヒヤリハットの判定結果および、そのときの自車両1、他車両21、23の走行状態の情報を検出部14に送る。
【0039】
検出部14は、ヒヤリハットの判定結果から他車両23、23のヒヤリハットの発生を検出すると、記憶部9に注意喚起のタイミングの補正を指令する。なお、検出部14は判定部13から送られてきた自車両1と他車両21、23の走行状態の情報も併せて記憶部9に送る。
【0040】
記憶部9は本発明のタイミング補正手段を形成し、検出部14の注意喚起のタイミングの補正の指令に基づき、内部の書き込み/読み出しの処理部(図示せず)により、前記不揮発性メモリに保持されている設定時間Tsetを例えば単位時間ずつ増やして注意喚起のタイミングを補正する。なお、設定時間Tsetが増えると注意喚起のタイミングは早くなる。そして、設定時間Tsetの初期値が標準の3.2秒であるとすると、補正による注意喚起のタイミングの変化は最大で1秒程度に制限される。補正量が多くなり過ぎると、注意喚起の効果がなくなる可能性があるからである。
【0041】
ところで、注意喚起のタイミングの補正は、自車両1の運転行動が遅れることに起因する他車両21、23のヒヤリハットの発生に基づいて行なわれるので、通常は、設定時間Tsetを長くして注意喚起のタイミングを早めるものであるが、例えば、補正のくり返し等によって注意喚起のタイミングがドライバにとって早くなり過ぎ、注意喚起の効果が薄れた結果、ヒヤリハットが発生するようになったと判断されるような場合には、補正によって設定時間Tsetを一定範囲内で短くして注意喚起のタイミングを遅くしてもよい。
【0042】
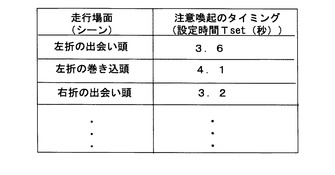
つぎに、注意喚起のタイミングは、図2のような左折の出会い頭の衝突の可能性、図3のような左折の巻き込みの衝突の可能性、その他の衝突の可能性がある各走行場面(シーン)について、共通に1つだけ設定してもよいが、ドライバの運転行動の特性が交差点での右左折や直進等の走行場面によって異なることから、本実施形態においては、設定した複数の走行場面毎に注意喚起のタイミングを記憶部9の前記不揮発性メモリに書き込んで保持する。
【0043】
図4は記憶部9の前記不揮発性メモリに保持された注意喚起のタイミング(設定時間Tset)の一例を示し、各走行場面の注意喚起のタイミング(設定時間Tset)は、必要に応じて標準の3.2秒から自動的に補正されている。
【0044】
すなわち、注意喚起のタイミングの補正が指令された記憶部9は、指令と共に取得した自車両1と他車両21、23の走行状態の情報に基づき、自車両1と他車両21、23との相対的な位置関係や、自車両1および他車両21、23の速度、加減速度等から、該当する走行場面を判別し、該当する走行場面の注意喚起のタイミングを指令にしたがって補正する。
【0045】
そして、注意喚起処理部8は、前記した進路予想により注意喚起が必要な他車両21、23を検出すると、自車両1と他車両21、23の走行状態の情報に基づき、その走行場面を判別し、該当する走行場面の設定時間Tsetを記憶部9から読み出し、その注意喚起のタイミングになると、表示部10、スピーカ11を通して注意喚起を行なう。
【0046】
なお、管理部3、7、注意喚起処理部8、記憶部9、判定検出部12等は、本実施形態の場合、マイクロコンピュータがソフトウェアを実行することで形成される。
【0047】
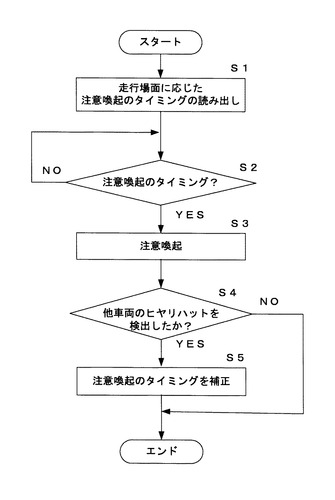
図5は注意喚起が必要になった他車両21、23が検出されたときの図1の動作の一例を示し、まず、注意喚起処理部8は管理部3、7の情報に基づいて記憶部9から該当する走行場面の注意喚起のタイミング(設定時間Tset)を読み出す(ステップS1)。そして、注意喚起のタイミングになると(ステップS2で”YES”)、注意喚起処理部8は、表示部10の表示、スピーカ11の音声(音)の出力によって注意喚起を行なう(ステップS3)。つぎに、検出部14が他車両21、23のヒヤリハットの発生を検出すると(ステップS4で”YES”)、記憶部9の該当する走行場面の注意喚起のタイミングを補正する(ステップS5)。ステップS4で”NO”の場合は、注意喚起のタイミングを補正しないで本フローチャートを終了する。
【0048】
そして、上記補正をくり返すことにより、自車両1の注意喚起のタイミングは、注意喚起に基づく自車両1の運転行動に対する他車両21、23のヒヤリハットの発生状況から学習して走行場面毎に自動的に補正される。
【0049】
この場合、注意喚起のタイミングを自動的に的確に自車両1の走行場面に応じたドライバの運転行動の特性に最適なタイミングに自動的に補正することができ、次回、同じ走行場面に遭遇すると、補正された注意喚起のタイミングで表示部10、スピーカ11が注意喚起を行なうことにより、ドライバによらず、交差点Ia、Ibの手前で確実に停止し、他車両21、23から客観的にみても自車両1が危険な運転行動(例えば他車両21、23が接近しているのに飛び出そうとするような運転行動)をとらないようにすることができ、安全性が著しく向上する。
【0050】
また、判定部13の判定結果に基づき、検出部14は、衝突可能性があって接近する他車両の運転状態の情報からヒヤリハットの発生を確実に検出し、この検出に基づいて注意喚起のタイミングを補正することができるため、ヒヤリハットの発生の誤検出がなく、補正の信頼性が向上して安全性が一層向上する。
【0051】
さらに、注意喚起処理部8が注意喚起のタイミングを早めて補正することにより、とくに、注意喚起が発生してからブレーキペダル操作やハンドル操作を行うまでに時間がかかるドライバに対して、注意喚起のタイミングを、的確にそのドライバの最適なタイミング(早めのタイミング)に補正できる。
【0052】
したがって、本実施形態の運転支援装置は、注意喚起のタイミングを、走行場面に応じたドライバの運転行動の特性に最適なタイミングに自動的に的確に補正し、最適なタイミングで注意喚起が行なえ、自車両1や他車両21、23の安全性が極めて向上する。
【0053】
そして、本発明は上記した実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行なうことが可能であり、例えば、注意喚起のタイミングとしての設定時間Tsetは、初期設定の標準時間が3.2秒に限られるものではなく、その補正量(範囲)も実験等に基づいて適当に設定してよいのは勿論である。
【0054】
また、注意喚起のタイミングの補正手順等は、前記実施形態の手順等に限るものではない。
【0055】
さらに、自車両1、他車両21、23の走行状態の情報の種類や、注意喚起の方法等は前記実施形態のものに限るものではない。
【0056】
つぎに、前記実施形態においては、他車両21〜23の走行状態の情報を車車間通信で取得したが、本発明は、車車間通信を行なわない場合にも適用することができ、この場合は、例えば前記した測距センサの測距情報や周囲を撮影するカメラの撮影画像情報から、他車両21〜23を捕捉してそれらの速度、加減速度、ブレーキのオン/オフ(ブレーキランプの点消灯)、ブレーキ圧、ブレーキペダルの踏み込み速度、操舵方向、右左折(方向指示器の点滅)等の走行状態の情報を取得し、他車両21〜23の走行状態の情報を自車両1の自律センサによって取得すればよい。
【0057】
つぎに、前記実施形態においては、自車両1の判定部13により、自車両1側で他車両21、23のヒヤリハットの発生を判定したが、この判定を他車両21、23側で行い、その判定結果を車車間通信で自車両1が受信し、受信した判定結果から検出部14によって他車両21、23のヒヤリハットの発生を検出するようにしてもよい。
【0058】
また、ヒヤリハットの発生を他車両21、23側で行なう場合、例えば、他車両21、23に取り付けたモニタカメラでそれぞれの車両のドライバの顔を撮影し、画像処理によってドライバの表情の変化からヒヤリハットの発生を判定するようにしてもよく、ドライバの体温や心拍数、発汗等の観測に基づいてヒヤリハットの発生を判定するようにしてもい。
【0059】
そして、本発明は、種々の車両の運転支援装置に適用することができる。
【符号の説明】
【0060】
1 自車両
8 注意喚起処理部
9 記憶部
10 表示部
11 スピーカ
14 検出部
21〜23 他車両
【技術分野】
【0001】
この発明は、衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置に関し、詳しくは注意喚起のタイミングの改善に関する。
【背景技術】
【0002】
近年、車車間通信による安全運転支援システムの研究・開発が進められ、その1つとして、運転支援装置により、他車両(いわゆる自動車だけでなく二輪車等も含む)との車車間通信に基づき、衝突可能性がある他車両の接近に対し、衝突予測時点よりTTC(Time to Collision:衝突余裕時間)前から注意喚起や警報を行なうことが考えられている。そして、この注意喚起に基づいて自車両が減速や停止をすることにより、例えば信号機のない交差点を左折する場合に、自車両の右側から直進して接近してくる他車両との出会い頭の衝突を回避することができ、安全運転に寄与する。
【0003】
ところで、前記TTCは、自車両と他車両の距離(相対距離)を両者の相対速度で除算した車間時間であり、従来、一般的な人間行動特性を基準にして例えば3.2秒に設定される。
【0004】
一方、自車両と先行車両等の警報対象物との衝突可能性を喚起音でドライバに注意喚起する車両用警報装置において、ブレーキペダル踏み遅れ時間とブレーキペダル踏み込み速度とに基づいて喚起音を出力するタイミングを制御し、ドライバのブレーキペダル操作特性(ブレーキ操作の癖)を考慮して反応時間が比較的長い傾向にあるドライバに対する喚起音の出力タイミングを、通常の反応時間を考慮したタイミングより早くすることが提案されている(例えば、特許文献1(要約書、段落[0014]、[0024]、図2等)参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−182325号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来の運転支援装置は、前記したようにドライバによらずTTCを一定時間に設定して注意喚起を行なう。この場合、ブレーキペダル操作特性等の運転行動の特性がドライバによって異なることから、ドライバによっては最適なタイミングの注意喚起とならない可能性がある。例えば、自車両が信号機のない交差点を左折する場合に、注意喚起に基づく自車両の減速や停止が遅れ、接近する他車両に、衝突しそうになってドライバがはっとする事態、すなわち、ヒヤリハットが発生し、他車両のドライバに衝突回避のブレーキやハンドルの操作等を行なわせてしまう可能性がある。なお、他車両との車車間通信を行なう代わりに、自車両の測距レーダや撮影手段(単眼カメラ等)のような自律センサの情報から他車両の走行状態の情報を得て注意喚起を行なう場合にも同様の問題がある。
【0007】
また、特許文献1に記載のようにドライバのブレーキペダル操作特性に応じて注意喚起のタイミングを早めるようにするだけでは、他車両にヒヤリハットが発生しない運転を行なうドライバに対しても、早められたタイミングで注意喚起が行なわれる可能性があり、この場合、不必要に注意喚起のタイミングが早められることにより、ドライバは何の注意喚起なのかわからず、注意喚起が意味をなさなくなる可能性がある。
【0008】
さらに、ドライバのプレーキペダル操作特性等の運転行動の特性は、交差点での右左折や直進等の走行場面(シーン)によって異なるが、従来の運転支援装置にあっては、そのような走行場面の別も考慮した最適な注意喚起は全く提案されていない。
【0009】
すなわち、衝突可能性がある他車両の接近に対して注意喚起を行なう従来のこの種の運転支援装置においては、ドライバの運転行動の特性、さらには走行場面を考慮して、個々のドライバに応じた最適なタイミングで注意喚起が行なえない問題がある。
【0010】
本発明は、衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにすることを目的とする。
【課題を解決するための手段】
【0011】
上記した目的を達成するために、本発明の運転支援装置は、衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置であって、衝突可能性があって自車両に接近する他車両のヒヤリハットの発生を検出する検出手段と、前記検出手段の検出に基づいて次回の注意喚起のタイミングを補正するタイミング補正手段と、前記タイミング補正手段により補正されたタイミングで注意喚起を行なう注意喚起手段とを備えたことを特徴としている(請求項1)。
【0012】
また、本発明の運転支援装置の前記検出手段は、衝突可能性があって自車両に接近する他車両の運転状態の情報から前記ヒヤリハットの発生を検出することを特徴としている(請求項2)。
【0013】
また、本発明の運転支援装置の前記タイミング補正手段は、前記検出手段が前記ヒヤリハットの発生を検出することにより注意喚起のタイミングを早めるように補正することを特徴としている(請求項3)。
【0014】
さらに、本発明の運転支援装置の注意喚起手段は、自車両と衝突可能性がある他車両との走行関係に基づき、該当する走行関係の注意喚起の補正されたタイミングにしたがって注意喚起を行うことを特徴としている(請求項4)。
【発明の効果】
【0015】
請求項1の発明の場合、例えば自車両が信号機のない交差点を左折する際、自車両の右側から直進して接近する他車両は衝突可能性があって自車両に接近する他車両であり、このような他車両について、検出手段による他車両のヒヤリハットの発生の検出に基づき、タイミング補正手段が注意喚起のタイミングを学習して補正し、注意喚起手段が補正されたタイミングで注意喚起を行なう。
【0016】
この場合、自車両の運転行動に対する他車両のヒヤリハットの発生状況から学習して注意喚起のタイミングを補正するため、注意喚起のタイミングを自動的に的確に自車両のドライバの運転行動の特性に応じた最適なタイミングにすることができ、補正されたタイミングの注意喚起により、他車両から客観的にみても自車両が危険な運転行動(例えば他車両が接近しているのに飛び出そうとするような運転行動)をとらないようにすることができ、自車両および他車両の安全性が向上する。
【0017】
請求項2の発明の場合、検出手段により、衝突可能性があって接近する他車両の運転状態の情報からヒヤリハットの発生を確実に検出し、この検出に基づいて注意喚起のタイミングを補正することができる。そのため、ヒヤリハットの発生の誤検出がなく、補正の信頼性が向上して安全性が一層向上する。
【0018】
また、請求項3の発明の場合、検出手段による他車両のヒヤリハットの発生の検出に基づき、タイミング補正手段が注意喚起のタイミングを早める補正を行なうため、とくに、注意喚起に対してブレーキペダル操作やハンドル操作を行うまでに時間がかかるドライバに対して、注意喚起のタイミングを的確にそのドライバの最適なタイミング(早めのタイミング)にできる。
【0019】
さらに、請求項4の発明の場合、自車両と、衝突可能性があって接近する他車両との走行関係に基づき、注意喚起手段により、走行場面も考慮して補正されたタイミングで注意喚起を行うことができる。
【0020】
したがって、一層的確にドライバの運転行動の特性に最適なタイミングに補正された注意喚起を行なうことができ、安全性が一層向上する。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態の運転支援装置のブロック図である。
【図2】図1の自車両の走行場面の一例の説明図である。
【図3】図1の自車両の走行場面の他の例の説明図である。
【図4】図1の記憶部の注意喚起のタイミング例の説明図である。
【図5】図1の動作説明用のフローチャートである。
【発明を実施するための形態】
【0022】
つぎに、本発明をより詳細に説明するため、一実施形態について、図1〜図5を参照して詳述する。
【0023】
まず、図2、図3により、注意喚起が必要になる走行場面の例を説明する。
【0024】
図2は交差点での出会い頭の衝突の可能性がある走行場面であり、紙面の下側の走行路R1が左右の走行路R2と交差する信号機のないT字路の交差点Iaの部分を示す。
【0025】
そして、走行路R1の黒塗り三角形の自車両1が実線矢印aに示すように交差点Iaで左折する場合、走行路R2の交差点Iaの付近を走行中の白抜き三角形の他車両21、22は自車両1と車車間通信可能であり、そのうちの他車両21は実線矢印bに示すように、左折後の自車両1の走行路R2を自車両1と同じ方向(紙面の右から左)に走行するので衝突可能性があり、しかも、他車両21は自車両1に接近しつつある。したがって、他車両21は衝突可能性があって自車両1に接近する車両であり、注意喚起が必要な車両である。なお、他車両22は、自車両1に接近しつつあるが、実線矢印cに示すように左折後の自車両1とは逆方向に走行しているので、自車両1と進路が交差することはなく、衝突可能性はない。
【0026】
図3は交差点での巻き込みの衝突の可能性がある走行場面であり、紙面上下方向の走行路R3と紙面左右方向の走行路R4が交差する信号機のない十字路の交差点Ibの部分を示す。
【0027】
そして、交差点Ibの手前(紙面下側)の走行路R3を走行中の黒塗り三角形の自車両1が実線矢印dに示すように交差点Ibで左折する際、交差点Ibの手前の走行路R3を白抜き三角形の他車両(例えば二輪車)23が自車両1に接近しつつ走行し、この他車両23が実線矢印eに示すように交差点Ibを直進又は左折するものとすると、他車両23の進路は自車両1の左折の進路と交差し、他車両23は衝突可能性がある。したがって、他車両23は、衝突可能性があって自車両1に接近する車両であり、注意喚起が必要な車両である。
【0028】
そして、交差点Ia、Ibに接近した自車両1および他車両21〜23は、周知の車車間通信で相互に位置、速度、加減速度、ブレーキのオン/オフ、操舵等の走行状態の情報をやり取りする。自車両1は、自車両1の走行状態の情報と、取得した他車両21〜23の走行状態の情報とに基づき、マイクロコンピュータ構成の運転支援装置のソフトウェア処理により、自車1および他車両21〜23の走行を予測し、この予測から衝突可能性がある他車両21、23を検出し、さらに、検出した車両21、23が自車両1に接近していると、設定されたTTCに基づき、自車両1と他車両21、23との進路が交差する衝突予測タイミングよりTCCだけ前のタイミングから注意喚起を行なう。また、後述するように前記運転支援装置は注意喚起のタイミングの必要な補正を行なう。
【0029】
図1は自車両1の上記運転支援装置の一部の構成を示し、図1において、3は自車情報管理部であり、例えばGPS受信部4により受信したGPSの測位情報(自車位置の情報)および、CAN(Controller Area Network)通信部5により受信した速度センサ、ブレーキセンサ、舵角センサ、ヨーレートセンサ等の自車内の走行に関連する各種自律センサの検出情報や方向指示器等の情報から、自車両1の最新の位置、速度、加減速度、ブレーキのオン/オフ、操舵方向、右左折等の走行状態の情報(データ)を取得して管理する。なお、自車両1が自車前方を探査する測距レーダや周囲を撮影するカメラ(単眼カメラ等)も備える場合、自車情報管理部3は測距レーダの測距情報(車間距離情報)やカメラの撮影画像情報も走行状態の情報として管理する。
【0030】
6は車車間受信機であり、前記した一定の距離範囲内にある他車両21〜23から車車間通信で送信された各種の情報を受信する。7は受信データ管理部であり、車車間受信機6が受信した情報から、他車両21〜23の最新の位置、速度、加減速度、ブレーキのオン/オフ、操舵方向、右左折等の走行状態の情報を取得して管理する。
【0031】
8は注意喚起処理部であり、自車情報管理部3の自車両1の時々刻々の走行状態の情報(データ)と、受信データ管理部7の他車両21〜23の時々刻々の走行状態の情報とに基づき、例えば、自車両1および他車両21〜23の進路予想を行い、他車両21〜23の進路(走行予測軌跡)が自車両1の進路と交差する場合には衝突可能性があると判断する。さらに、衝突可能性があると判断した他車両のうちの自車両1との相対距離が短くなって自車両1に接近しつつある他車両21、23を注意喚起が必要な車両として検出する。
【0032】
つぎに、注意喚起処理部8は、自車両1と他車両21、23の相対距離および相対速度から求められる時々刻々のTTCが、記憶部9に注意喚起のタイミングとして保持されたTTCの設定時間Tsetになり、注意喚起のタイミングになると、表示部10に注意喚起のメッセージ、図形等を表示し、スピーカ11から注意喚起のメッセージ音声あるいは喚起音を出力し、注意喚起を行なう。なお、注意喚起のタイミング(実際には設定時間Tset)は、記憶部9のフラッシュメモリ等の書換え自在の不揮発性メモリ(図示せず)に保持される。
【0033】
表示部10、スピーカ11は本発明の注意喚起手段を形成し、表示部10は例えば自車両1のダッシュボードのメータ表示パネルに設けられ、スピーカ11は自車両1の車室内の適当な位置に取り付けられている。
【0034】
そして、設定時間Tsetは、最初は標準の時間(例えば3.2秒)に設定されるが、つぎに説明するように、衝突可能性があって自車両1に接近し、注意喚起が必要な他車両21、23のヒヤリハットの検出に基づいて、注意喚起のタイミングがドライバの最適なタイミングになるように補正される。
【0035】
図1の12はヒヤリハットの判定検出部であり、判定部13と検出部14を備える。
【0036】
そして、本実施形態の場合、注意喚起が行なわれて自車両1が左折等する際に、車車間通信で取得した注意喚起が必要な他車両21、23の運転状態の情報に基づき、他車両21、23のヒヤリハットの発生を自車両1側で判定して検出するため、判定部13は、注意喚起処理部8からの通知、または、車両自車情報管理部3および受信データ管理部7が管理する情報に基づく注意喚起処理部8と同様の進路予測により、注意喚起が必要な他車両21、23を認識し、車両自車情報管理部3および受信データ管理部7が管理する情報に基づいて他車両21、23の走行状態を追跡する。
【0037】
さらに、判定部13は、例えば図2、図3に示したように自車両1が左折等する際、他車両21、23の位置、速度、加減速度、操舵方向の一定以上の変化やブレーキのオン等から、他車両21、23のドライバが衝突回避の操作を行なったか否かを判定し、それらの操作が行われて他車両21、23にヒヤリハットが発生したと判定すると、判定結果と共に、そのときの自車両1と他車両21、23の走行状態の情報を検出部(本発明の検出手段)14に送る。
【0038】
すなわち、自車両1のドライバに設定時間Tsetに基づくタイミングで注意喚起をしたにもかかわらず、衝突可能性があって自車両1に接近する他車両21、23にヒヤリハットが発生し、他車両21、23のドライバが衝突回避行動をとったときには、判定部13は、自車両1の運転行動が危険であったと判断し、注意喚起のタイミングを早める必要があると学習して、ヒヤリハットの判定結果および、そのときの自車両1、他車両21、23の走行状態の情報を検出部14に送る。
【0039】
検出部14は、ヒヤリハットの判定結果から他車両23、23のヒヤリハットの発生を検出すると、記憶部9に注意喚起のタイミングの補正を指令する。なお、検出部14は判定部13から送られてきた自車両1と他車両21、23の走行状態の情報も併せて記憶部9に送る。
【0040】
記憶部9は本発明のタイミング補正手段を形成し、検出部14の注意喚起のタイミングの補正の指令に基づき、内部の書き込み/読み出しの処理部(図示せず)により、前記不揮発性メモリに保持されている設定時間Tsetを例えば単位時間ずつ増やして注意喚起のタイミングを補正する。なお、設定時間Tsetが増えると注意喚起のタイミングは早くなる。そして、設定時間Tsetの初期値が標準の3.2秒であるとすると、補正による注意喚起のタイミングの変化は最大で1秒程度に制限される。補正量が多くなり過ぎると、注意喚起の効果がなくなる可能性があるからである。
【0041】
ところで、注意喚起のタイミングの補正は、自車両1の運転行動が遅れることに起因する他車両21、23のヒヤリハットの発生に基づいて行なわれるので、通常は、設定時間Tsetを長くして注意喚起のタイミングを早めるものであるが、例えば、補正のくり返し等によって注意喚起のタイミングがドライバにとって早くなり過ぎ、注意喚起の効果が薄れた結果、ヒヤリハットが発生するようになったと判断されるような場合には、補正によって設定時間Tsetを一定範囲内で短くして注意喚起のタイミングを遅くしてもよい。
【0042】
つぎに、注意喚起のタイミングは、図2のような左折の出会い頭の衝突の可能性、図3のような左折の巻き込みの衝突の可能性、その他の衝突の可能性がある各走行場面(シーン)について、共通に1つだけ設定してもよいが、ドライバの運転行動の特性が交差点での右左折や直進等の走行場面によって異なることから、本実施形態においては、設定した複数の走行場面毎に注意喚起のタイミングを記憶部9の前記不揮発性メモリに書き込んで保持する。
【0043】
図4は記憶部9の前記不揮発性メモリに保持された注意喚起のタイミング(設定時間Tset)の一例を示し、各走行場面の注意喚起のタイミング(設定時間Tset)は、必要に応じて標準の3.2秒から自動的に補正されている。
【0044】
すなわち、注意喚起のタイミングの補正が指令された記憶部9は、指令と共に取得した自車両1と他車両21、23の走行状態の情報に基づき、自車両1と他車両21、23との相対的な位置関係や、自車両1および他車両21、23の速度、加減速度等から、該当する走行場面を判別し、該当する走行場面の注意喚起のタイミングを指令にしたがって補正する。
【0045】
そして、注意喚起処理部8は、前記した進路予想により注意喚起が必要な他車両21、23を検出すると、自車両1と他車両21、23の走行状態の情報に基づき、その走行場面を判別し、該当する走行場面の設定時間Tsetを記憶部9から読み出し、その注意喚起のタイミングになると、表示部10、スピーカ11を通して注意喚起を行なう。
【0046】
なお、管理部3、7、注意喚起処理部8、記憶部9、判定検出部12等は、本実施形態の場合、マイクロコンピュータがソフトウェアを実行することで形成される。
【0047】
図5は注意喚起が必要になった他車両21、23が検出されたときの図1の動作の一例を示し、まず、注意喚起処理部8は管理部3、7の情報に基づいて記憶部9から該当する走行場面の注意喚起のタイミング(設定時間Tset)を読み出す(ステップS1)。そして、注意喚起のタイミングになると(ステップS2で”YES”)、注意喚起処理部8は、表示部10の表示、スピーカ11の音声(音)の出力によって注意喚起を行なう(ステップS3)。つぎに、検出部14が他車両21、23のヒヤリハットの発生を検出すると(ステップS4で”YES”)、記憶部9の該当する走行場面の注意喚起のタイミングを補正する(ステップS5)。ステップS4で”NO”の場合は、注意喚起のタイミングを補正しないで本フローチャートを終了する。
【0048】
そして、上記補正をくり返すことにより、自車両1の注意喚起のタイミングは、注意喚起に基づく自車両1の運転行動に対する他車両21、23のヒヤリハットの発生状況から学習して走行場面毎に自動的に補正される。
【0049】
この場合、注意喚起のタイミングを自動的に的確に自車両1の走行場面に応じたドライバの運転行動の特性に最適なタイミングに自動的に補正することができ、次回、同じ走行場面に遭遇すると、補正された注意喚起のタイミングで表示部10、スピーカ11が注意喚起を行なうことにより、ドライバによらず、交差点Ia、Ibの手前で確実に停止し、他車両21、23から客観的にみても自車両1が危険な運転行動(例えば他車両21、23が接近しているのに飛び出そうとするような運転行動)をとらないようにすることができ、安全性が著しく向上する。
【0050】
また、判定部13の判定結果に基づき、検出部14は、衝突可能性があって接近する他車両の運転状態の情報からヒヤリハットの発生を確実に検出し、この検出に基づいて注意喚起のタイミングを補正することができるため、ヒヤリハットの発生の誤検出がなく、補正の信頼性が向上して安全性が一層向上する。
【0051】
さらに、注意喚起処理部8が注意喚起のタイミングを早めて補正することにより、とくに、注意喚起が発生してからブレーキペダル操作やハンドル操作を行うまでに時間がかかるドライバに対して、注意喚起のタイミングを、的確にそのドライバの最適なタイミング(早めのタイミング)に補正できる。
【0052】
したがって、本実施形態の運転支援装置は、注意喚起のタイミングを、走行場面に応じたドライバの運転行動の特性に最適なタイミングに自動的に的確に補正し、最適なタイミングで注意喚起が行なえ、自車両1や他車両21、23の安全性が極めて向上する。
【0053】
そして、本発明は上記した実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行なうことが可能であり、例えば、注意喚起のタイミングとしての設定時間Tsetは、初期設定の標準時間が3.2秒に限られるものではなく、その補正量(範囲)も実験等に基づいて適当に設定してよいのは勿論である。
【0054】
また、注意喚起のタイミングの補正手順等は、前記実施形態の手順等に限るものではない。
【0055】
さらに、自車両1、他車両21、23の走行状態の情報の種類や、注意喚起の方法等は前記実施形態のものに限るものではない。
【0056】
つぎに、前記実施形態においては、他車両21〜23の走行状態の情報を車車間通信で取得したが、本発明は、車車間通信を行なわない場合にも適用することができ、この場合は、例えば前記した測距センサの測距情報や周囲を撮影するカメラの撮影画像情報から、他車両21〜23を捕捉してそれらの速度、加減速度、ブレーキのオン/オフ(ブレーキランプの点消灯)、ブレーキ圧、ブレーキペダルの踏み込み速度、操舵方向、右左折(方向指示器の点滅)等の走行状態の情報を取得し、他車両21〜23の走行状態の情報を自車両1の自律センサによって取得すればよい。
【0057】
つぎに、前記実施形態においては、自車両1の判定部13により、自車両1側で他車両21、23のヒヤリハットの発生を判定したが、この判定を他車両21、23側で行い、その判定結果を車車間通信で自車両1が受信し、受信した判定結果から検出部14によって他車両21、23のヒヤリハットの発生を検出するようにしてもよい。
【0058】
また、ヒヤリハットの発生を他車両21、23側で行なう場合、例えば、他車両21、23に取り付けたモニタカメラでそれぞれの車両のドライバの顔を撮影し、画像処理によってドライバの表情の変化からヒヤリハットの発生を判定するようにしてもよく、ドライバの体温や心拍数、発汗等の観測に基づいてヒヤリハットの発生を判定するようにしてもい。
【0059】
そして、本発明は、種々の車両の運転支援装置に適用することができる。
【符号の説明】
【0060】
1 自車両
8 注意喚起処理部
9 記憶部
10 表示部
11 スピーカ
14 検出部
21〜23 他車両
【特許請求の範囲】
【請求項1】
衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置であって、
衝突可能性があって自車両に接近する他車両のヒヤリハットの発生を検出する検出手段と、
前記検出手段の検出に基づいて注意喚起のタイミングを補正するタイミング補正手段と、
前記タイミング補正手段により補正されたタイミングで注意喚起を行なう注意喚起手段とを備えたことを特徴とする運転支援装置。
【請求項2】
請求項1に記載の運転支援装置において、
前記検出手段は、衝突可能性があって自車両に接近する他車両の運転状態の情報から前記ヒヤリハットの発生を検出することを特徴とする運転支援装置。
【請求項3】
請求項1または2に記載の運転支援装置において、
前記タイミング補正手段は、前記検出手段が前記ヒヤリハットの発生を検出することにより注意喚起のタイミングを早めるように補正することを特徴とする運転支援装置。
【請求項4】
請求項1〜3のいずれかに記載の運転支援装置において、
前記注意喚起手段は、自車両と衝突可能性がある他車両との走行関係に基づき、該当する走行関係の注意喚起の補正されたタイミングにしたがって注意喚起を行うことを特徴とする運転支援装置。
【請求項1】
衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置であって、
衝突可能性があって自車両に接近する他車両のヒヤリハットの発生を検出する検出手段と、
前記検出手段の検出に基づいて注意喚起のタイミングを補正するタイミング補正手段と、
前記タイミング補正手段により補正されたタイミングで注意喚起を行なう注意喚起手段とを備えたことを特徴とする運転支援装置。
【請求項2】
請求項1に記載の運転支援装置において、
前記検出手段は、衝突可能性があって自車両に接近する他車両の運転状態の情報から前記ヒヤリハットの発生を検出することを特徴とする運転支援装置。
【請求項3】
請求項1または2に記載の運転支援装置において、
前記タイミング補正手段は、前記検出手段が前記ヒヤリハットの発生を検出することにより注意喚起のタイミングを早めるように補正することを特徴とする運転支援装置。
【請求項4】
請求項1〜3のいずれかに記載の運転支援装置において、
前記注意喚起手段は、自車両と衝突可能性がある他車両との走行関係に基づき、該当する走行関係の注意喚起の補正されたタイミングにしたがって注意喚起を行うことを特徴とする運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−113275(P2011−113275A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−268768(P2009−268768)
【出願日】平成21年11月26日(2009.11.26)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月26日(2009.11.26)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]