
運転支援装置
【課題】タイヤの走行予測軌跡を認識できる運転支援装置を提供する。
【解決手段】車両が後退する際に運転者を支援する運転支援装置であって、車両の後方画像を撮像するカメラと、自車両の操舵角を検出する操舵角検出部と、操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を後方に延長したタイヤ幅の軌跡の画像を生成し、カメラが撮像した後方画像にタイヤ幅の軌跡の画像を重ねた画像を生成する表示処理部と、表示処理部が生成した画像を表示する表示部と、を備える運転支援装置とする。
【解決手段】車両が後退する際に運転者を支援する運転支援装置であって、車両の後方画像を撮像するカメラと、自車両の操舵角を検出する操舵角検出部と、操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を後方に延長したタイヤ幅の軌跡の画像を生成し、カメラが撮像した後方画像にタイヤ幅の軌跡の画像を重ねた画像を生成する表示処理部と、表示処理部が生成した画像を表示する表示部と、を備える運転支援装置とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を運転する運転者に対し運転支援を行う車両の運転支援装置に関する。
【背景技術】
【0002】
車両の駐車などの際、車両の運転席のディスプレイの画面上に、車両後部に搭載されたカメラで撮像された画像を映し出すとともにこの画像上に走行予測車両枠、及び、タイヤ走行予測線を表示する運転支援システムが知られている。走行予測車両枠は、車両が移動した場合に、車両が存在する位置を示す枠である。タイヤ走行予測線は、車両が移動した場合に、車両のタイヤの中心が走行する位置を示す線である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−311898号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
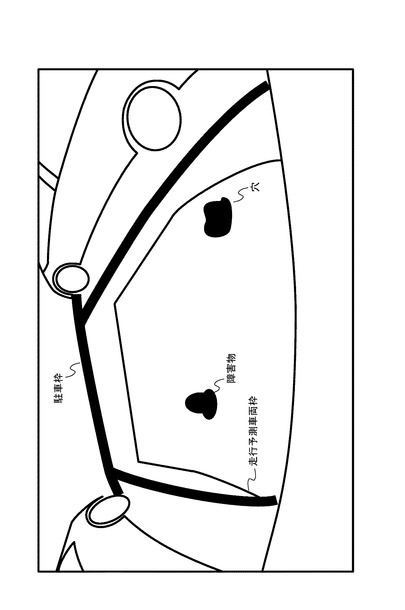
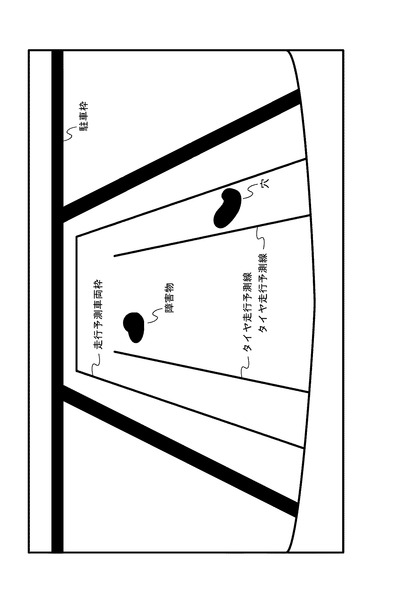
図1、図2、及び、図3は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。図3は、タイヤ走行予測線を含む画像の例を示す図である。図1及び図3は、ステアリングの操舵角が0度で、直進して後退する場合の例を示す図である。図10は、ステアリングの操舵角が0度ではなく、回転して後退する場合の例を示す図である。操舵角は、車両の進行方向に対する前輪の傾きである。図1、図2、及び、図3では、車両の後方に設置されたカメラの画像に走行予測車両枠が重ねられている。図1、図2、及び、図3の例では、駐車枠で囲まれる駐車スペースに障害物及び穴が存在する。
【0005】
車両の運転者は、駐車枠に車両が収まるか否かを、走行予測車両枠により、認識することができる。車両の運転者は、走行予測車両枠を確認しながら、ステアリング等を操作し、駐車枠に車両を収めることができる。
【0006】
しかし、走行予測車両枠及びタイヤ走行予測線では、車両の運転者は、タイヤがどの位置を通過するかを正確に認識することが難しい。よって、車両の運転者が、タイヤが金属片等の障害物に接触するか否か、タイヤが穴や溝などに脱輪するか否かを正確に判別することは困難である。
【0007】
また、コインパーキング等の駐車場では、車両ロック装置が設置される場合がある。車両ロック装置は、駐車車両の車体底面に向けて起倒可能なロック板(可動翼)やロック板を起倒させる機構部等を備えた装置である。車両ロック装置は、駐車車両の前輪と後輪との間に位置するように駐車スペース内に設置される。車両ロック装置が設置された駐車場で車両を駐車する際、タイヤが車両ロック装置の上を通過することが求められる。この時、車両の運転者は、走行予測車両枠及びタイヤ走行予測線では、車両のタイヤが車両ロック装置の上を通過するか否か容易に認識することができない。
【0008】
本発明は、タイヤの走行予測軌跡を認識できる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
開示の運転支援装置は、上記課題を解決するために、以下の手段を採用する。
【0010】
運転支援装置の一態様は、車両が進行する際に運転者を支援する運転支援装置であって、前記車両の前方又は後方の画像を撮像するカメラからの画像を取得するカメラ画像取得部と、自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡の画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤ幅の軌跡の画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、を備える運転支援装置である。
運転支援装置の他の態様は、車両が進行する際に運転者を支援する運転支援装置であって、前記車両の前方又は後方画像を撮像するカメラからの画像を取得するカメラ画像取得部と、自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡上に、前記タイヤのタイヤ幅及びタイヤ幅の軌跡の方向に基づいてタイヤの立体画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤの立体画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、を備える運転支援装置である。
【発明の効果】
【0011】
本発明によれば、タイヤの走行予測軌跡を認識できる運転支援装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。
【図2】図2は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。
【図3】図3は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。
【図4】図4は、運転支援装置の例を示す図である。
【図5】図5は、運転支援装置の動作フローの例を説明する図である。
【図6】図6は、図5の動作フローのステップS104の「タイヤ幅の軌跡を算出」の動作フローの例を示す図である。
【図7】図7は、回転中心Oと車両との関係を示す図である。
【図8】図8は、タイヤ幅の軌跡の例を示す図である。
【図9】図9は、画像処理部が生成する画像の例を示す図である。
【図10】図10は、画像処理部が生成する画像の例を示す図である。
【図11】図11は、画像処理部が生成する画像の例を示す図である。
【図12】図12は、画像処理部が生成する画像の例を示す図である。
【図13】図13は、画像処理部が生成する画像の例を示す図である。
【図14】図14は、画像処理部が生成する画像の例を示す図である。
【図15】図15は、運転支援装置のカメラと路面との関係の例を示す図である。
【図16】図16は、カメラが撮影したタイヤ痕及び路面の画像の例である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明にかかる運転支援装置について説明する。実施形態の構成は例示であり、本発明は開示の実施形態の構成に限定されない。
【0014】
ここで説明する運転支援装置は、例えば、乗用自動車、トラック等の車両に搭載される。
〔実施形態1〕
(構成例)
【0015】
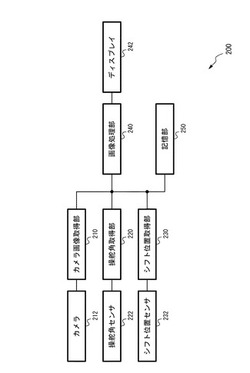
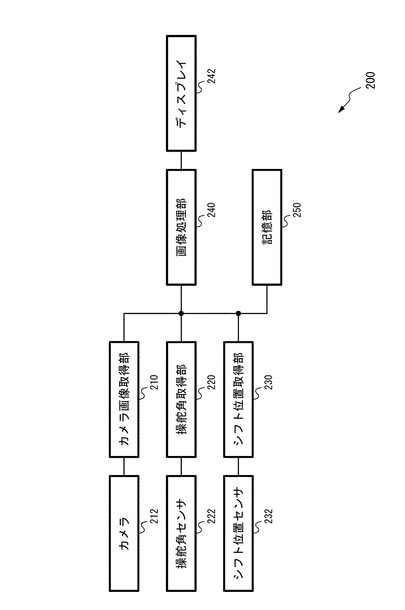
図4は、運転支援装置の例を示す図である。車両支援装置200は、車両100に搭載される。運転支援装置200は、カメラ画像取得部210、カメラ212、操舵角取得部220、操舵角センサ222、シフト位置取得部230、シフト位置センサ232、画像処理部240、ディスプレイ242、記憶部250を有する。
【0016】
カメラ画像取得部210は、カメラ212が撮像した画像データを取得する。カメラ画像取得部210は、カメラ212を制御する。
【0017】
カメラ212は、車両の後方に設置される。カメラ212は、車両後方の外部空間を撮像することが可能である。カメラ212は、例えば、スチルカメラ、ビデオカメラが挙げられる。カメラ212の設置位置、設置角度(レンズの向きなど)は、あらかじめ所定の値に設定されている。カメラ212の設置位置、設置角度は、可変であってもよい。カメラ212のレンズの向きは、車両の後方斜め下方向である。
【0018】
操舵角取得部220は、車両のステアリング(ハンドル)の操舵角を示す情報(操舵角情報)を取得する。操舵角取得部220は、例えば、車載用の操舵角センサ222から操舵角情報を取得することができる。操舵角情報は、CAN(Controller Area Network)
情報から取得されてもよい。
【0019】
シフト位置取得部230は、シフト位置センサ232が検出したシフトレバーの位置の情報を、シフト位置センサ232から取得する。シフト位置センサ232は、車両100のシフトレバーの位置を検出する。
【0020】
画像処理部240は、カメラ画像取得部210、操舵角取得部220、シフト位置取得部230、及び、記憶部250からの情報を基に、ディスプレイ242に表示する画像を生成する。画像処理部240は、走行予測車両枠、タイヤのタイヤ幅の軌跡を算出することができる。
【0021】
ディスプレイ242は、運転席から視認できる位置に設置される。ディスプレイ242には、画像処理部240が処理した画像が表示される。ディスプレイ242に表示される画像は、車両100内のバックミラーに映るものと同様にするため、鏡像であってもよい。
【0022】
記憶部250は、画像処理部240などが使用するデータやプログラム等を格納する。記憶部250は、車両に装着されるタイヤの形状情報、車両形状情報、カメラ212の情報等を格納する。タイヤの形状情報は、タイヤの幅、タイヤの直径等である。車両形状情報は、車両幅、ホイールベース等である。カメラ212の情報は、カメラの画像の画角、設置位置、レンズの向き、レンズの性能等である。
【0023】
運転支援装置200は、PC、ワークステーション(WS、Work Station)、PDA(Personal Digital Assistant)のような専用または汎用のコンピュータ、あるいは、コンピュータを搭載した電子機器を使用して実現可能である。また、運転支援装置200は、カーナビゲーション装置のような専用または汎用のコンピュータ、あるいは、コンピュータを搭載した電子機器を使用して実現可能である。
【0024】
コンピュータ、すなわち、情報処理装置は、プロセッサ、主記憶装置、及び、二次記憶装置や、通信インタフェース装置のような周辺装置とのインタフェース装置を含む。主記
憶装置及び二次記憶装置は、コンピュータ読み取り可能な記録媒体である。
【0025】
コンピュータは、プロセッサが記録媒体に記憶されたプログラムを主記憶装置の作業領域にロードして実行し、プログラムの実行を通じて周辺機器が制御されることによって、所定の目的に合致した機能を実現することができる。
【0026】
プロセッサは、例えば、CPU(Central Processing Unit)やDSP(Data Signal Processor)である。主記憶装置は、例えば、RAM(Random Access Memory)やROM(Read Only Memory)を含む。
【0027】
二次記憶装置は、例えば、EPROM(Erasable Programmable ROM)、ハードディス
クドライブ(HDD、Hard Disk Drive)である。また、二次記憶装置は、リムーバブル
メディア、即ち可搬記録媒体を含むことができる。リムーバブルメディアは、例えば、USB(Universal Serial Bus)メモリ、あるいは、CD(Compact Disk)やDVD(Digital Versatile Disk)のようなディスク記録媒体である。
【0028】
通信インタフェース装置は、例えば、LAN(Local Area Network)インタフェースボードや、無線通信のための無線通信回路である。
【0029】
周辺装置は、上記の二次記憶装置や通信インタフェース装置の他、キーボードやポインティングデバイスのような入力装置や、ディスプレイ装置やプリンタのような出力装置を含む。また、入力装置は、カメラのような映像や画像の入力装置や、マイクロフォンのような音声の入力装置を含むことができる。また、出力装置は、スピーカのような音声の出力装置を含むことができる。
【0030】
運転支援装置200を実現するコンピュータは、プロセッサが二次記憶装置に記憶されているプログラムを主記憶装置にロードして実行することによって、カメラ画像取得部210、操舵角取得部220、シフト位置取得部230及び画像処理部240としての機能を実現する。一方、記憶部250は、主記憶装置または二次記憶装置の記憶領域に設けられる。
(動作例)
【0031】
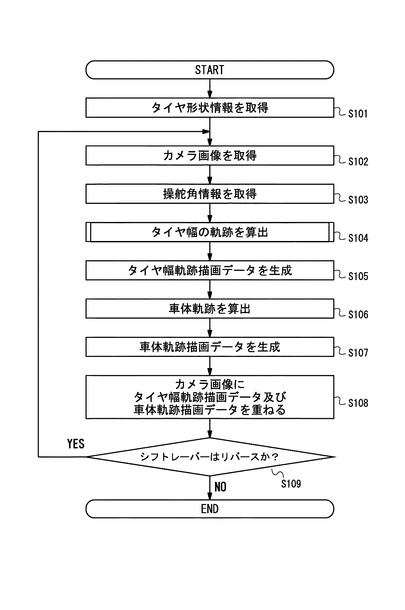
図5は、運転支援装置の動作フローの例を説明する図である。
【0032】
運転支援装置200のシフト位置センサ222が、シフトレバーがリバース(後退)の位置であることを検出することを契機として、図5の動作フローは開始される。
【0033】
シフト位置取得部230は、シフト位置センサ232から、シフトレバーがリバースの位置である情報を取得する。シフト位置取得部230は、カメラ画像取得部210、操舵角取得部220、画像処理部240に、シフトレバーがリバースの位置であることを通知する。
【0034】
画像処理部240は、記憶部250にあらかじめ格納されるタイヤ形状情報を、記憶部250から取得する(S101)。記憶部250には、タイヤの幅を含むタイヤの形状情報が格納される。タイヤの形状情報は、工場出荷時、若しくは、ユーザの操作により、記憶部250に格納され得る。タイヤの形状情報は、CAN情報から取得されてもよい。
【0035】
カメラ212は、車両後方を撮像する。カメラ画像取得部210は、カメラ212から、車両後方を撮像した画像を取得する(S102)。
【0036】
操舵角取得部220は、操舵センサ222から操舵角情報を取得する(S103)。操舵角情報は、車両のステアリングの操舵角を示す情報である。
【0037】
画像処理部240は、カメラ画像取得部210から車両後方の画像、操舵角取得部220から、操舵角情報を取得する。また、画像処理部240は、記憶部250から、車両形状情報を取得する。車両形状情報は、車両幅、ホイールベース等を含む。画像処理部240は、取得した情報を使用して、タイヤ幅の軌跡の空間座標を算出する(S104)。タイヤ幅の軌跡の算出については、後に詳述する。タイヤ幅の軌跡は、現在の操舵角で車両が後退した場合に、タイヤが通過する位置である。
【0038】
画像処理部240は、ステップS104で算出したタイヤ幅の軌跡の空間座標から、カメラ画像取得部210から取得した車両後方の画像の座標に合わせた、タイヤ幅軌跡描画データを生成する(S105)。ここで、車両のタイヤの底面が作る平面及び車両の周辺が同一平面であると仮定する。即ち、カメラ212が撮像する画像は、車両のタイヤの底面が作る平面と同一であると仮定する。カメラ212のレンズの画角、カメラ212の設置位置、カメラ212のレンズの方向等は、既知である。このため、カメラ212が撮影した画像の各画素が空間座標上でどの位置に対応するかは、容易に算出されうる。よって、画像処理部240は、タイヤ幅の軌跡の空間座標から、車両後方の画像の座標に合わせた、タイヤ幅軌跡描画データを生成することができる。
【0039】
また、運転支援装置200は、あらかじめ乾いた路面をタイヤを濡らした車両で走行し、路面のタイヤ痕をカメラ212で撮影しておいてもよい。この場合、カメラ212があらゆる操舵角、移動距離等の条件についてタイヤ痕を撮影し、画像処理部240がタイヤ痕を抽出し、操舵角等の条件毎にタイヤ幅軌跡の画像として記憶部250に格納する。画像処理部240は、操舵角等の条件に応じて記憶部250からタイヤ幅軌跡の画像を読み出し、この画像を車両後方の画像の座標に合わせたタイヤ幅軌跡描画データとすることができる。画像処理部240は、記憶部250に格納された画像を使用すると、タイヤ幅軌跡の算出をしなくてもよいため、画像処理部240における画像処理の負荷を軽減できる。
【0040】
画像処理部240は、車両形状情報、操舵角情報等に基づいて、車体軌跡の空間座標を算出する(S106)。車体軌跡は、現在の操舵角で車両が後退した場合に、車体(車両)が通過する領域である。車体軌跡の空間座標は、周知の方法により算出され得る。
【0041】
画像処理部240は、ステップS106で算出した車体軌跡の空間座標から、カメラ画像取得部210から取得した車両後方の画像の空間に合わせた、車体軌跡描画データ(走行予測車両枠の描画データ)を生成する(S107)。
【0042】
画像処理部240は、カメラ画像取得部210から取得した画像に、ステップS105で生成したタイヤ幅軌跡描画データ、および、ステップS107で生成した車体軌跡描画データを重ねた画像を生成する(S108)。ディスプレイ242は、画像処理部240が生成した画像を表示する。画像処理部240は、カメラ画像取得部210から取得した画像が完全に隠れないように、タイヤ幅軌跡の領域を半透明の色にすることができる。また、画像処理部240は、タイヤ幅軌跡をタイヤ幅軌跡の領域の枠(枠線)のみとしてもよい。
【0043】
シフト位置取得部230は、シフトレバーがリバースの位置であるか否かをシフト位置センサを介して確認する(S109)。シフトレバーがリバースの位置である場合(S109;YES)、運転支援装置200は、ステップS102以降の処理を繰り返す。シフトレバーがリバースの位置でない場合(S109;NO)、運転支援装置200は処理を
終了する。
【0044】
図5の動作フローにより、シフトレバーがリバースの位置になると、運転支援装置200のディスプレイ242に、カメラ212が撮像した車両後方の画像と、操舵角に応じたタイヤ幅の予測軌跡および走行予測車両枠とが、重ねて表示される。走行予測車両枠は、表示されなくてもよい。
〈タイヤ幅の軌跡の算出〉
【0045】
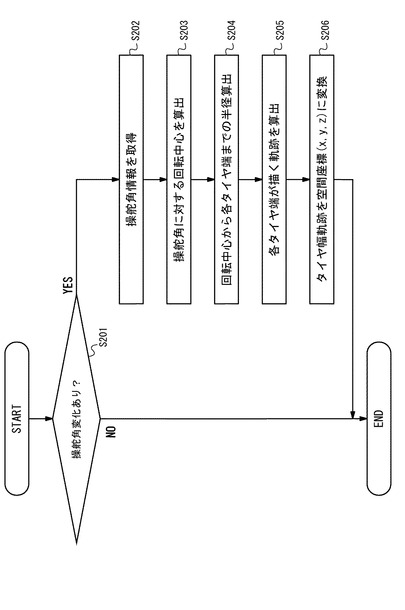
図6は、図5のステップS104の「タイヤ幅の軌跡を算出」の動作フローの例を示す図である。
【0046】
画像処理部240は、操舵角情報から、操舵角が直前の操舵角と比べて変化があったかを確認する(S201)。操舵角が変化していない場合(S201;NO)、画像処理部240は、タイヤ幅軌跡の空間座標を、直前に算出したものと同じとして、この動作フローの処理を終了する。ここで、直前の操舵角情報がない場合(即ち、初めて、この動作フローを実施する場合)は、操舵角が変化したとする。
【0047】
操舵角が直前の操舵角と比べて変化があった場合(S201;YES)、画像処理部240は、タイヤ幅軌跡の空間座標を新たに算出する。操舵角が変化すると、タイヤ幅軌跡が変化するからである。画像処理部240は、操舵角取得部220から現在の操舵角φを取得する(S202)。
【0048】
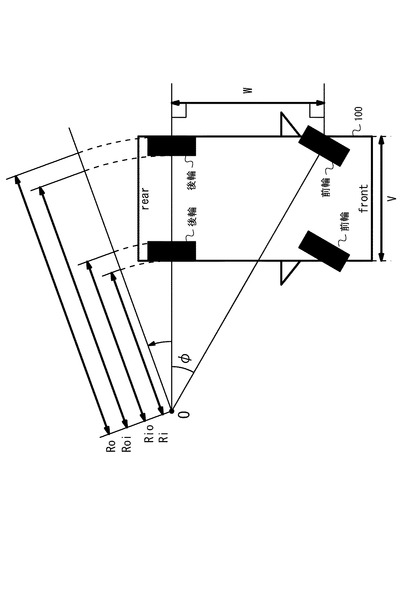
画像処理部240は、車両100の操舵角φに対する回転中心Oの位置を算出する(S203)。操舵角φが0度でない場合、車両100は回転中心Oを中心として回転する。回転中心Oの位置は、操舵角φ及びホイールベースWに依存する。ホイールベースWは、車両100の前輪の車軸と後輪の車軸との間の距離である。ホイールベースWは、車両形状情報として、記憶部250にあらかじめ格納され得る。操舵角φが0度である場合、回転中心Oは算出されない。ただし、操舵角φが0度である場合、回転中心Oは、後輪の車軸上の車両100から無限遠の位置であるとみなしてもよい。
【0049】
図7は、回転中心Oと車両との関係を示す図である。車両100の前輪の操舵角は、角度φである。回転中心Oは、車両100の外輪側の前輪の車軸の延長線と後輪の車軸の延長線との交点である。ここで、図7のように、車両100の前輪が進行方向に対して右側に傾いている場合、進行方向に対して右側のタイヤを内輪側、左側のタイヤを外輪側とする。
【0050】
図6に戻って、画像処理部240は、回転中心Oから後輪の各タイヤ端までの距離(回転半径)を算出する(S204)。
【0051】
図7を参照して、各回転半径を定義する。回転中心Oから外輪側の後輪外側のタイヤ端までの距離を回転半径Roとする。回転中心Oから外輪側の後輪内側のタイヤ端までの距離を回転半径Roiとする。回転中心Oから内輪側の後輪外側のタイヤ端までの距離を回転半径Riとする。回転中心Oから内輪側の後輪内側のタイヤ端までの距離を回転半径Rioとする。各回転半径は、次のように算出される。ここで、タイヤ幅をw、車両100の全幅(外輪側の後輪外側から内輪側の後輪外側までの距離)をVとする。
【数1】

【0052】
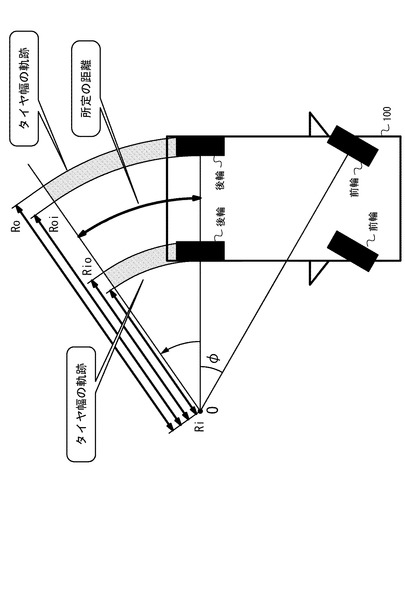
図6に戻って、画像処理部240は、車両100の後輪のタイヤ端が描く軌跡を算出する(S205)。画像処理部240は、車両100が、現在の車両100の位置から所定の距離後退した場合のタイヤ端が描く軌跡を求める。この所定の距離は、運転者があらかじめ設定してもよい。この所定の距離は、記憶部250に格納され得る。また、この所定の距離は、後輪の車軸の中心が移動する距離とすることができる。車両100の後輪の各タイヤ端は、回転中心Oを中心に、現在の車両100の位置から車両が後退する方向に、各回転半径の円弧を描く。内輪側のタイヤの2つのタイヤ端が描く軌跡に囲まれる領域が、内輪側のタイヤのタイヤ幅の軌跡となる。また、外輪側のタイヤの2つのタイヤ端が描く軌跡に囲まれる領域が、外輪側のタイヤのタイヤ幅の軌跡となる。
【0053】
回転中心Oが存在しない場合、車両100の後輪のタイヤ端が描く軌跡は、現在の車両100の位置からまっすぐ所定の距離後退した場合のタイヤ端が描く軌跡となる。また、左右のタイヤのそれぞれの2つのタイヤ端に囲まれる領域がタイヤ幅の軌跡となる。
【0054】
図8は、タイヤ幅の軌跡の例を示す図である。図8は、車両100の操舵角が角度φである場合に、車両100が、回転中心Oを中心として所定の距離後退した場合のタイヤ幅の軌跡の例を示している。
【0055】
図6に戻って、画像処理部240は、ステップS205で算出したタイヤ幅の軌跡の空間座標(x,y,z)を算出する(S206)。このタイヤ幅の軌跡の空間座標は、車両100に対する相対的な座標として算出される。タイヤ幅の軌跡の空間座標が算出されると、この動作フローの処理は終了する。
【0056】
図6の動作フローにより、タイヤ幅の軌跡の空間座標が算出される。
(表示例)
【0057】
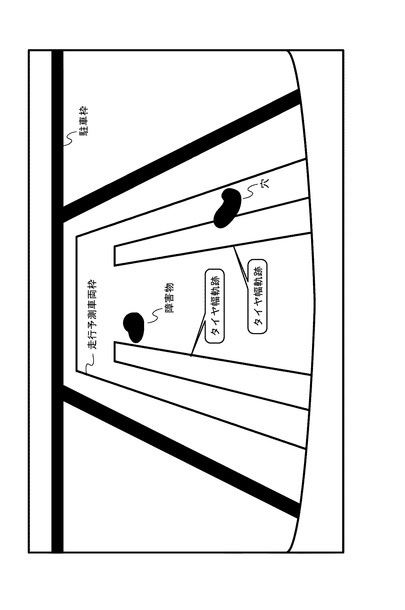
図9は、画像処理部が生成する画像の例を示す図である。図9は、図1の例と同様に、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠及びタイヤ幅軌跡の領域の枠が重ねられている。駐車枠で囲まれる駐車スペースには、障害物及び穴が存在する。
【0058】
車両100の運転者は、ディスプレイ242に表示された図9の画像により、直進して後退した場合に、タイヤが障害物や穴の上を通過するか否かを確認することができる。図9の例では、車両100の運転者は、タイヤが穴の上を通過するが障害物の上を通過しな
いことを認識できる。よって、運転者は、ステアリングを操作すること等により、穴を避けることができる。
【0059】
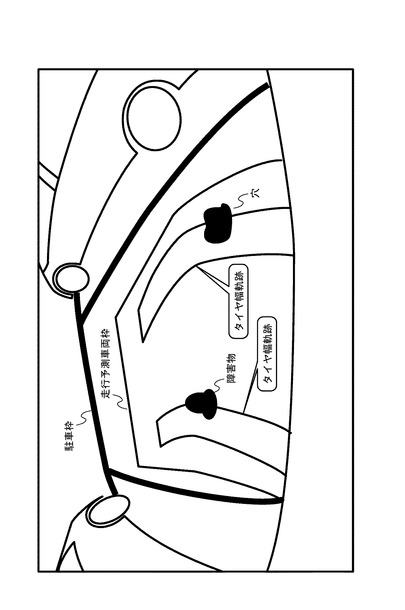
図10は、画像処理部が生成する画像の例を示す図である。図10は、図2の例と同様に、車両100が駐車枠に回転して後退する場合(操舵角φが0度でない場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠及びタイヤ幅軌跡の領域の枠が重ねられている。駐車枠で囲まれる駐車スペースには、障害物及び穴が存在する。
【0060】
車両100の運転者は、ディスプレイ242に表示された図10の画像により、このままの操舵角φで後退した場合に、タイヤが障害物や穴の上を通過するか否かを確認することができる。図10の例では、車両100の運転者は、タイヤが障害物及び穴の上を通過することを認識できる。よって、運転者は、ステアリングを操作すること等により、障害物及び穴を避けることができる。運転者は、タイヤ幅の表示により、タイヤの内側と外側に直近の障害物等に接触するか否かを見極めることができる。
【0061】
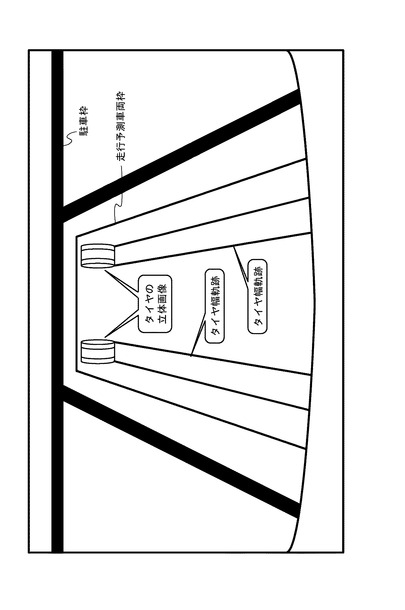
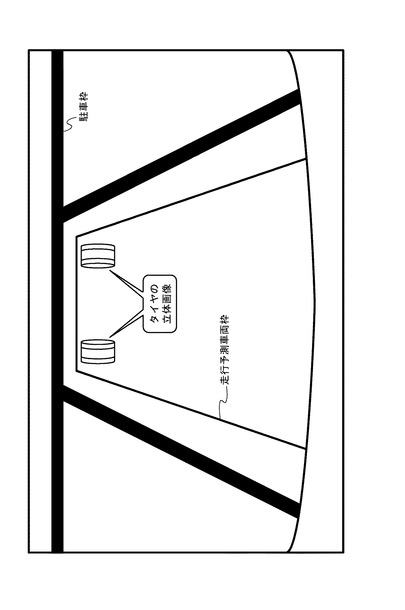
図11は、画像処理部が生成する画像の例を示す図である。図11は、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、タイヤ幅軌跡の領域の枠及びタイヤの立体画像が重ねられている。
【0062】
画像処理部240は、カメラ212が撮像した画像、走行予測車両枠、タイヤ幅軌跡の領域の枠に、さらに、タイヤの立体画像を重ねることができる。画像処理部240は、例えば、図6の動作フローのステップS108で、タイヤの立体画像を重ねることができる。タイヤの立体画像は、記憶部250に格納されるタイヤ形状情報から作成され得る。また、あらかじめ、タイヤをあらゆる方向から撮影した画像を撮影して記憶部250に格納しておいたものを、タイヤの立体画像として使用してもよい。画像処理部240は、タイヤ幅軌跡のタイヤの走行方向、タイヤ幅に合わせてタイヤの立体画像を調整する。
【0063】
タイヤの立体画像をカメラ212が撮像した画像に重ねることにより、運転者は、タイヤの向き等を容易に認識できる。
【0064】
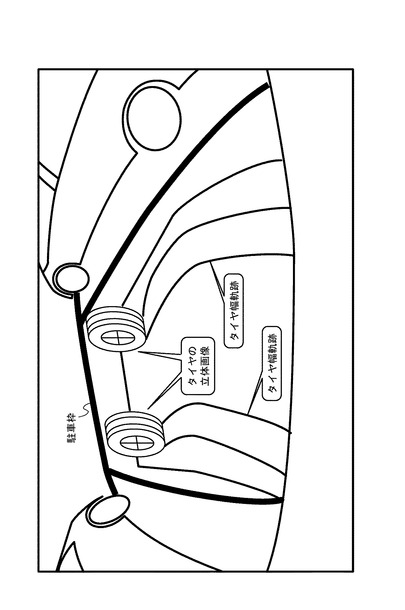
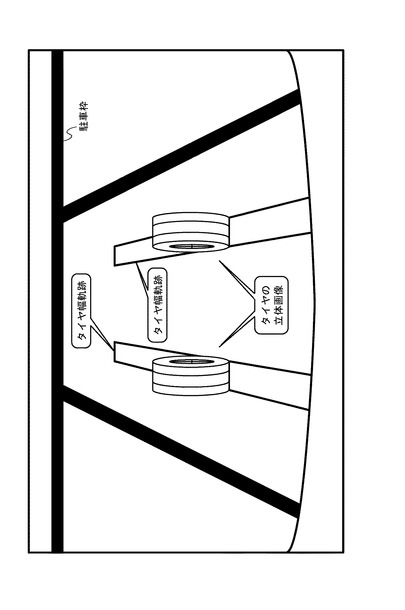
図12は、画像処理部が生成する画像の例を示す図である。図12は、車両100が駐車枠に直進して後退する場合(操舵角φが0度でない場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、タイヤ幅軌跡の領域の枠及びタイヤの立体画像が重ねられている。
【0065】
表示されるタイヤの立体画像におけるタイヤの向きは、タイヤ幅軌跡の方向に合わせて変化する。即ち、タイヤの向きは、車両100の操舵角φによって、変化する。また、表示されるタイヤの立体画像におけるタイヤの大きさ(タイヤ幅、タイヤの直径など)は、タイヤ幅軌跡の幅に合わせて変化する。
【0066】
図13は、画像処理部が生成する画像の例を示す図である。図13は、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、及び、タイヤの立体画像が重ねられている。画像処理部240は、カメラ212が撮像した画像、及び、走行予測車両枠に、タイヤ幅軌跡の領域の枠を重ねずに、タイヤの立体画像を重ねてもよい。
【0067】
図14は、画像処理部が生成する画像の例を示す図である。図14は、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、タイヤ幅軌跡の領域の枠及びタイヤの立体画
像が重ねられている。タイヤの立体画像は、タイヤ幅軌跡の中間位置に表示されている。タイヤの立体画像を表示する位置は、ユーザの設定等により自由に変更され得る。タイヤの立体画像を表示する位置は、車両100からの距離などによって指定され得る。タイヤがタイヤ幅軌跡の上を転がって移動するように、タイヤの立体画像が表示されてもよい。また、運転者の操作によって、タイヤの立体画像がタイヤ幅軌跡上を自由に移動できるようにしてもよい。タイヤの立体画像の表示位置をタイヤ幅軌跡の上で変更することにより、運転者はタイヤがどの位置をどのように移動するかを認識することができる。また、タイヤの大きさと障害物の大きさとを相対的に視認できることにより、運転者は、タイヤが障害物を乗り越えることができるか否か判別することができる。
〈タイヤ幅の計測〉
【0068】
車両100のタイヤが交換されること等により、車両100に装着されるタイヤのタイヤ幅が変更される場合がある。このような場合、運転者は、記憶部250に格納されるタイヤ形状情報を書き換えることができる。また、運転支援装置200は、次のように、タイヤのタイヤ幅を実際に計測して求めてもよい。
【0069】
あらかじめ水などで車両100のタイヤを濡らした上で、車両100が、乾いた路面を、前方方向に直進する。運転支援装置100のカメラ212は、車両後方のタイヤ痕を撮像する。
【0070】
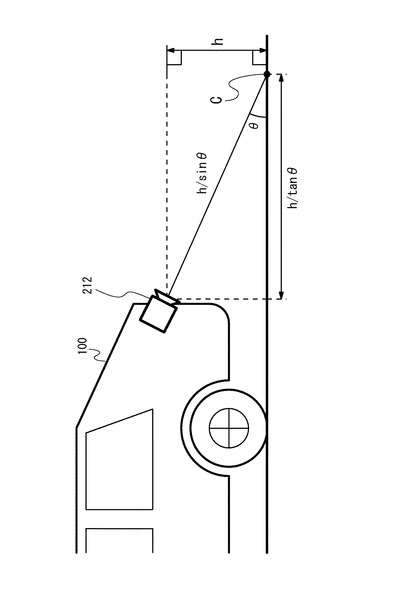
図15は、運転支援装置のカメラと路面との関係の例を示す図である。ここで、カメラ212の設置位置の路面からの高さを、高さh、カメラ212のレンズの方向と路面とのなす角を、角度θとする。カメラ212のレンズの中心からカメラのレンズ方向に伸ばした直線と路面との交点を点Cとする。カメラ212と点Cとの距離は、h/sinθとなる。
【0071】
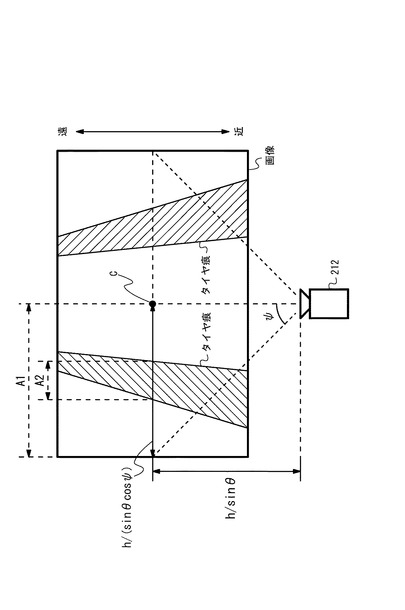
図16は、カメラが撮影したタイヤ痕及び路面の画像の例である。画像の下から上に向かって、カメラ212からの実際の距離は遠くなる。画像処理部240は、カメラ212が撮像した画像から、タイヤ痕部分を抽出する。乾いた路面を濡れたタイヤで走行すると、路面とタイヤ痕とのコントラストが明確になるため、画像処理部240は、タイヤ痕を抽出しやすい。
【0072】
図16の画像内の点Cは、図15の点Cに対応する。図16の画像の点Cを通る横幅の実際の画角を角度2ψとする。点Cから画像の端(左端)までの実際の距離は、h/(sinθcosψ)となる。ここで、図16のように、点Cから画像の端(左端)までの画像におけるドット数を、A1、点Cから画像の左端までの直線がタイヤ痕を横切るドット数を、A2とする。画角ψが非常に小さい場合、実際のタイヤ幅は、次のように求められる。
【数2】
【0073】
画像に映る対象物の画像1ドット当たりの実際の距離は、カメラから対称物への距離に反比例する。カメラの画角、設置位置及び設置角度等は、既知である。これらのことを利用して、車両のタイヤの底面が作る平面及び車両の周辺が同一平面であると仮定すると、画像上のタイヤ痕(走行跡)からタイヤ幅がより正確に算出され得る。
【0074】
画像処理部240は、算出したタイヤのタイヤ幅をタイヤ形状情報として、記憶部250に格納する。画像処理部240は、タイヤ幅軌跡の算出の際、このタイヤ幅の情報を使用することができる。
【0075】
(変形例)
上記では、カメラ212が車両の後方に設置され、後輪のタイヤ幅の軌跡を表示する構成としたが、上記の場合と同様にして、カメラが車両の前方に設置され、前方に進行して駐車等を行う際に、前輪のタイヤ幅の軌跡を表示する構成とすることも可能である。この場合、図5の動作フローに相当する動作は、運転者が入力装置等により運転支援開始を指示すること等により開始され、運転支援終了を指示すること等により終了する。前輪の各タイヤ端の回転半径は、後輪の場合と同様に、操舵角φ、ホイールベースW、タイヤ幅w、車幅V等から算出される。
(実施形態の作用効果)
【0076】
運転支援装置200によると、車両の運転者は操舵角に応じたタイヤ幅及びタイヤの通過位置を把握できる。運転支援装置200によれば、車両の下の障害物の回避、車両の下の溝等への脱輪の防止が可能となる。また、タイヤの大きさと障害物の大きさとを相対的に視認できることにより、運転者は、タイヤが障害物を乗り越えることができるか否か判別することができる。
【符号の説明】
【0077】
100 車両
200 運転支援装置
210 カメラ画像取得部
212 カメラ
220 操舵角取得部
222 操舵角センサ
230 シフト位置取得部
232 シフト位置センサ
240 画像処理部
242 ディスプレイ
250 記憶部
【技術分野】
【0001】
本発明は、車両を運転する運転者に対し運転支援を行う車両の運転支援装置に関する。
【背景技術】
【0002】
車両の駐車などの際、車両の運転席のディスプレイの画面上に、車両後部に搭載されたカメラで撮像された画像を映し出すとともにこの画像上に走行予測車両枠、及び、タイヤ走行予測線を表示する運転支援システムが知られている。走行予測車両枠は、車両が移動した場合に、車両が存在する位置を示す枠である。タイヤ走行予測線は、車両が移動した場合に、車両のタイヤの中心が走行する位置を示す線である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−311898号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
図1、図2、及び、図3は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。図3は、タイヤ走行予測線を含む画像の例を示す図である。図1及び図3は、ステアリングの操舵角が0度で、直進して後退する場合の例を示す図である。図10は、ステアリングの操舵角が0度ではなく、回転して後退する場合の例を示す図である。操舵角は、車両の進行方向に対する前輪の傾きである。図1、図2、及び、図3では、車両の後方に設置されたカメラの画像に走行予測車両枠が重ねられている。図1、図2、及び、図3の例では、駐車枠で囲まれる駐車スペースに障害物及び穴が存在する。
【0005】
車両の運転者は、駐車枠に車両が収まるか否かを、走行予測車両枠により、認識することができる。車両の運転者は、走行予測車両枠を確認しながら、ステアリング等を操作し、駐車枠に車両を収めることができる。
【0006】
しかし、走行予測車両枠及びタイヤ走行予測線では、車両の運転者は、タイヤがどの位置を通過するかを正確に認識することが難しい。よって、車両の運転者が、タイヤが金属片等の障害物に接触するか否か、タイヤが穴や溝などに脱輪するか否かを正確に判別することは困難である。
【0007】
また、コインパーキング等の駐車場では、車両ロック装置が設置される場合がある。車両ロック装置は、駐車車両の車体底面に向けて起倒可能なロック板(可動翼)やロック板を起倒させる機構部等を備えた装置である。車両ロック装置は、駐車車両の前輪と後輪との間に位置するように駐車スペース内に設置される。車両ロック装置が設置された駐車場で車両を駐車する際、タイヤが車両ロック装置の上を通過することが求められる。この時、車両の運転者は、走行予測車両枠及びタイヤ走行予測線では、車両のタイヤが車両ロック装置の上を通過するか否か容易に認識することができない。
【0008】
本発明は、タイヤの走行予測軌跡を認識できる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
開示の運転支援装置は、上記課題を解決するために、以下の手段を採用する。
【0010】
運転支援装置の一態様は、車両が進行する際に運転者を支援する運転支援装置であって、前記車両の前方又は後方の画像を撮像するカメラからの画像を取得するカメラ画像取得部と、自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡の画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤ幅の軌跡の画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、を備える運転支援装置である。
運転支援装置の他の態様は、車両が進行する際に運転者を支援する運転支援装置であって、前記車両の前方又は後方画像を撮像するカメラからの画像を取得するカメラ画像取得部と、自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡上に、前記タイヤのタイヤ幅及びタイヤ幅の軌跡の方向に基づいてタイヤの立体画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤの立体画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、を備える運転支援装置である。
【発明の効果】
【0011】
本発明によれば、タイヤの走行予測軌跡を認識できる運転支援装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。
【図2】図2は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。
【図3】図3は、運転支援装置のディスプレイに表示される走行予測車両枠を含む画像の例を示す図である。
【図4】図4は、運転支援装置の例を示す図である。
【図5】図5は、運転支援装置の動作フローの例を説明する図である。
【図6】図6は、図5の動作フローのステップS104の「タイヤ幅の軌跡を算出」の動作フローの例を示す図である。
【図7】図7は、回転中心Oと車両との関係を示す図である。
【図8】図8は、タイヤ幅の軌跡の例を示す図である。
【図9】図9は、画像処理部が生成する画像の例を示す図である。
【図10】図10は、画像処理部が生成する画像の例を示す図である。
【図11】図11は、画像処理部が生成する画像の例を示す図である。
【図12】図12は、画像処理部が生成する画像の例を示す図である。
【図13】図13は、画像処理部が生成する画像の例を示す図である。
【図14】図14は、画像処理部が生成する画像の例を示す図である。
【図15】図15は、運転支援装置のカメラと路面との関係の例を示す図である。
【図16】図16は、カメラが撮影したタイヤ痕及び路面の画像の例である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明にかかる運転支援装置について説明する。実施形態の構成は例示であり、本発明は開示の実施形態の構成に限定されない。
【0014】
ここで説明する運転支援装置は、例えば、乗用自動車、トラック等の車両に搭載される。
〔実施形態1〕
(構成例)
【0015】
図4は、運転支援装置の例を示す図である。車両支援装置200は、車両100に搭載される。運転支援装置200は、カメラ画像取得部210、カメラ212、操舵角取得部220、操舵角センサ222、シフト位置取得部230、シフト位置センサ232、画像処理部240、ディスプレイ242、記憶部250を有する。
【0016】
カメラ画像取得部210は、カメラ212が撮像した画像データを取得する。カメラ画像取得部210は、カメラ212を制御する。
【0017】
カメラ212は、車両の後方に設置される。カメラ212は、車両後方の外部空間を撮像することが可能である。カメラ212は、例えば、スチルカメラ、ビデオカメラが挙げられる。カメラ212の設置位置、設置角度(レンズの向きなど)は、あらかじめ所定の値に設定されている。カメラ212の設置位置、設置角度は、可変であってもよい。カメラ212のレンズの向きは、車両の後方斜め下方向である。
【0018】
操舵角取得部220は、車両のステアリング(ハンドル)の操舵角を示す情報(操舵角情報)を取得する。操舵角取得部220は、例えば、車載用の操舵角センサ222から操舵角情報を取得することができる。操舵角情報は、CAN(Controller Area Network)
情報から取得されてもよい。
【0019】
シフト位置取得部230は、シフト位置センサ232が検出したシフトレバーの位置の情報を、シフト位置センサ232から取得する。シフト位置センサ232は、車両100のシフトレバーの位置を検出する。
【0020】
画像処理部240は、カメラ画像取得部210、操舵角取得部220、シフト位置取得部230、及び、記憶部250からの情報を基に、ディスプレイ242に表示する画像を生成する。画像処理部240は、走行予測車両枠、タイヤのタイヤ幅の軌跡を算出することができる。
【0021】
ディスプレイ242は、運転席から視認できる位置に設置される。ディスプレイ242には、画像処理部240が処理した画像が表示される。ディスプレイ242に表示される画像は、車両100内のバックミラーに映るものと同様にするため、鏡像であってもよい。
【0022】
記憶部250は、画像処理部240などが使用するデータやプログラム等を格納する。記憶部250は、車両に装着されるタイヤの形状情報、車両形状情報、カメラ212の情報等を格納する。タイヤの形状情報は、タイヤの幅、タイヤの直径等である。車両形状情報は、車両幅、ホイールベース等である。カメラ212の情報は、カメラの画像の画角、設置位置、レンズの向き、レンズの性能等である。
【0023】
運転支援装置200は、PC、ワークステーション(WS、Work Station)、PDA(Personal Digital Assistant)のような専用または汎用のコンピュータ、あるいは、コンピュータを搭載した電子機器を使用して実現可能である。また、運転支援装置200は、カーナビゲーション装置のような専用または汎用のコンピュータ、あるいは、コンピュータを搭載した電子機器を使用して実現可能である。
【0024】
コンピュータ、すなわち、情報処理装置は、プロセッサ、主記憶装置、及び、二次記憶装置や、通信インタフェース装置のような周辺装置とのインタフェース装置を含む。主記
憶装置及び二次記憶装置は、コンピュータ読み取り可能な記録媒体である。
【0025】
コンピュータは、プロセッサが記録媒体に記憶されたプログラムを主記憶装置の作業領域にロードして実行し、プログラムの実行を通じて周辺機器が制御されることによって、所定の目的に合致した機能を実現することができる。
【0026】
プロセッサは、例えば、CPU(Central Processing Unit)やDSP(Data Signal Processor)である。主記憶装置は、例えば、RAM(Random Access Memory)やROM(Read Only Memory)を含む。
【0027】
二次記憶装置は、例えば、EPROM(Erasable Programmable ROM)、ハードディス
クドライブ(HDD、Hard Disk Drive)である。また、二次記憶装置は、リムーバブル
メディア、即ち可搬記録媒体を含むことができる。リムーバブルメディアは、例えば、USB(Universal Serial Bus)メモリ、あるいは、CD(Compact Disk)やDVD(Digital Versatile Disk)のようなディスク記録媒体である。
【0028】
通信インタフェース装置は、例えば、LAN(Local Area Network)インタフェースボードや、無線通信のための無線通信回路である。
【0029】
周辺装置は、上記の二次記憶装置や通信インタフェース装置の他、キーボードやポインティングデバイスのような入力装置や、ディスプレイ装置やプリンタのような出力装置を含む。また、入力装置は、カメラのような映像や画像の入力装置や、マイクロフォンのような音声の入力装置を含むことができる。また、出力装置は、スピーカのような音声の出力装置を含むことができる。
【0030】
運転支援装置200を実現するコンピュータは、プロセッサが二次記憶装置に記憶されているプログラムを主記憶装置にロードして実行することによって、カメラ画像取得部210、操舵角取得部220、シフト位置取得部230及び画像処理部240としての機能を実現する。一方、記憶部250は、主記憶装置または二次記憶装置の記憶領域に設けられる。
(動作例)
【0031】
図5は、運転支援装置の動作フローの例を説明する図である。
【0032】
運転支援装置200のシフト位置センサ222が、シフトレバーがリバース(後退)の位置であることを検出することを契機として、図5の動作フローは開始される。
【0033】
シフト位置取得部230は、シフト位置センサ232から、シフトレバーがリバースの位置である情報を取得する。シフト位置取得部230は、カメラ画像取得部210、操舵角取得部220、画像処理部240に、シフトレバーがリバースの位置であることを通知する。
【0034】
画像処理部240は、記憶部250にあらかじめ格納されるタイヤ形状情報を、記憶部250から取得する(S101)。記憶部250には、タイヤの幅を含むタイヤの形状情報が格納される。タイヤの形状情報は、工場出荷時、若しくは、ユーザの操作により、記憶部250に格納され得る。タイヤの形状情報は、CAN情報から取得されてもよい。
【0035】
カメラ212は、車両後方を撮像する。カメラ画像取得部210は、カメラ212から、車両後方を撮像した画像を取得する(S102)。
【0036】
操舵角取得部220は、操舵センサ222から操舵角情報を取得する(S103)。操舵角情報は、車両のステアリングの操舵角を示す情報である。
【0037】
画像処理部240は、カメラ画像取得部210から車両後方の画像、操舵角取得部220から、操舵角情報を取得する。また、画像処理部240は、記憶部250から、車両形状情報を取得する。車両形状情報は、車両幅、ホイールベース等を含む。画像処理部240は、取得した情報を使用して、タイヤ幅の軌跡の空間座標を算出する(S104)。タイヤ幅の軌跡の算出については、後に詳述する。タイヤ幅の軌跡は、現在の操舵角で車両が後退した場合に、タイヤが通過する位置である。
【0038】
画像処理部240は、ステップS104で算出したタイヤ幅の軌跡の空間座標から、カメラ画像取得部210から取得した車両後方の画像の座標に合わせた、タイヤ幅軌跡描画データを生成する(S105)。ここで、車両のタイヤの底面が作る平面及び車両の周辺が同一平面であると仮定する。即ち、カメラ212が撮像する画像は、車両のタイヤの底面が作る平面と同一であると仮定する。カメラ212のレンズの画角、カメラ212の設置位置、カメラ212のレンズの方向等は、既知である。このため、カメラ212が撮影した画像の各画素が空間座標上でどの位置に対応するかは、容易に算出されうる。よって、画像処理部240は、タイヤ幅の軌跡の空間座標から、車両後方の画像の座標に合わせた、タイヤ幅軌跡描画データを生成することができる。
【0039】
また、運転支援装置200は、あらかじめ乾いた路面をタイヤを濡らした車両で走行し、路面のタイヤ痕をカメラ212で撮影しておいてもよい。この場合、カメラ212があらゆる操舵角、移動距離等の条件についてタイヤ痕を撮影し、画像処理部240がタイヤ痕を抽出し、操舵角等の条件毎にタイヤ幅軌跡の画像として記憶部250に格納する。画像処理部240は、操舵角等の条件に応じて記憶部250からタイヤ幅軌跡の画像を読み出し、この画像を車両後方の画像の座標に合わせたタイヤ幅軌跡描画データとすることができる。画像処理部240は、記憶部250に格納された画像を使用すると、タイヤ幅軌跡の算出をしなくてもよいため、画像処理部240における画像処理の負荷を軽減できる。
【0040】
画像処理部240は、車両形状情報、操舵角情報等に基づいて、車体軌跡の空間座標を算出する(S106)。車体軌跡は、現在の操舵角で車両が後退した場合に、車体(車両)が通過する領域である。車体軌跡の空間座標は、周知の方法により算出され得る。
【0041】
画像処理部240は、ステップS106で算出した車体軌跡の空間座標から、カメラ画像取得部210から取得した車両後方の画像の空間に合わせた、車体軌跡描画データ(走行予測車両枠の描画データ)を生成する(S107)。
【0042】
画像処理部240は、カメラ画像取得部210から取得した画像に、ステップS105で生成したタイヤ幅軌跡描画データ、および、ステップS107で生成した車体軌跡描画データを重ねた画像を生成する(S108)。ディスプレイ242は、画像処理部240が生成した画像を表示する。画像処理部240は、カメラ画像取得部210から取得した画像が完全に隠れないように、タイヤ幅軌跡の領域を半透明の色にすることができる。また、画像処理部240は、タイヤ幅軌跡をタイヤ幅軌跡の領域の枠(枠線)のみとしてもよい。
【0043】
シフト位置取得部230は、シフトレバーがリバースの位置であるか否かをシフト位置センサを介して確認する(S109)。シフトレバーがリバースの位置である場合(S109;YES)、運転支援装置200は、ステップS102以降の処理を繰り返す。シフトレバーがリバースの位置でない場合(S109;NO)、運転支援装置200は処理を
終了する。
【0044】
図5の動作フローにより、シフトレバーがリバースの位置になると、運転支援装置200のディスプレイ242に、カメラ212が撮像した車両後方の画像と、操舵角に応じたタイヤ幅の予測軌跡および走行予測車両枠とが、重ねて表示される。走行予測車両枠は、表示されなくてもよい。
〈タイヤ幅の軌跡の算出〉
【0045】
図6は、図5のステップS104の「タイヤ幅の軌跡を算出」の動作フローの例を示す図である。
【0046】
画像処理部240は、操舵角情報から、操舵角が直前の操舵角と比べて変化があったかを確認する(S201)。操舵角が変化していない場合(S201;NO)、画像処理部240は、タイヤ幅軌跡の空間座標を、直前に算出したものと同じとして、この動作フローの処理を終了する。ここで、直前の操舵角情報がない場合(即ち、初めて、この動作フローを実施する場合)は、操舵角が変化したとする。
【0047】
操舵角が直前の操舵角と比べて変化があった場合(S201;YES)、画像処理部240は、タイヤ幅軌跡の空間座標を新たに算出する。操舵角が変化すると、タイヤ幅軌跡が変化するからである。画像処理部240は、操舵角取得部220から現在の操舵角φを取得する(S202)。
【0048】
画像処理部240は、車両100の操舵角φに対する回転中心Oの位置を算出する(S203)。操舵角φが0度でない場合、車両100は回転中心Oを中心として回転する。回転中心Oの位置は、操舵角φ及びホイールベースWに依存する。ホイールベースWは、車両100の前輪の車軸と後輪の車軸との間の距離である。ホイールベースWは、車両形状情報として、記憶部250にあらかじめ格納され得る。操舵角φが0度である場合、回転中心Oは算出されない。ただし、操舵角φが0度である場合、回転中心Oは、後輪の車軸上の車両100から無限遠の位置であるとみなしてもよい。
【0049】
図7は、回転中心Oと車両との関係を示す図である。車両100の前輪の操舵角は、角度φである。回転中心Oは、車両100の外輪側の前輪の車軸の延長線と後輪の車軸の延長線との交点である。ここで、図7のように、車両100の前輪が進行方向に対して右側に傾いている場合、進行方向に対して右側のタイヤを内輪側、左側のタイヤを外輪側とする。
【0050】
図6に戻って、画像処理部240は、回転中心Oから後輪の各タイヤ端までの距離(回転半径)を算出する(S204)。
【0051】
図7を参照して、各回転半径を定義する。回転中心Oから外輪側の後輪外側のタイヤ端までの距離を回転半径Roとする。回転中心Oから外輪側の後輪内側のタイヤ端までの距離を回転半径Roiとする。回転中心Oから内輪側の後輪外側のタイヤ端までの距離を回転半径Riとする。回転中心Oから内輪側の後輪内側のタイヤ端までの距離を回転半径Rioとする。各回転半径は、次のように算出される。ここで、タイヤ幅をw、車両100の全幅(外輪側の後輪外側から内輪側の後輪外側までの距離)をVとする。
【数1】
【0052】
図6に戻って、画像処理部240は、車両100の後輪のタイヤ端が描く軌跡を算出する(S205)。画像処理部240は、車両100が、現在の車両100の位置から所定の距離後退した場合のタイヤ端が描く軌跡を求める。この所定の距離は、運転者があらかじめ設定してもよい。この所定の距離は、記憶部250に格納され得る。また、この所定の距離は、後輪の車軸の中心が移動する距離とすることができる。車両100の後輪の各タイヤ端は、回転中心Oを中心に、現在の車両100の位置から車両が後退する方向に、各回転半径の円弧を描く。内輪側のタイヤの2つのタイヤ端が描く軌跡に囲まれる領域が、内輪側のタイヤのタイヤ幅の軌跡となる。また、外輪側のタイヤの2つのタイヤ端が描く軌跡に囲まれる領域が、外輪側のタイヤのタイヤ幅の軌跡となる。
【0053】
回転中心Oが存在しない場合、車両100の後輪のタイヤ端が描く軌跡は、現在の車両100の位置からまっすぐ所定の距離後退した場合のタイヤ端が描く軌跡となる。また、左右のタイヤのそれぞれの2つのタイヤ端に囲まれる領域がタイヤ幅の軌跡となる。
【0054】
図8は、タイヤ幅の軌跡の例を示す図である。図8は、車両100の操舵角が角度φである場合に、車両100が、回転中心Oを中心として所定の距離後退した場合のタイヤ幅の軌跡の例を示している。
【0055】
図6に戻って、画像処理部240は、ステップS205で算出したタイヤ幅の軌跡の空間座標(x,y,z)を算出する(S206)。このタイヤ幅の軌跡の空間座標は、車両100に対する相対的な座標として算出される。タイヤ幅の軌跡の空間座標が算出されると、この動作フローの処理は終了する。
【0056】
図6の動作フローにより、タイヤ幅の軌跡の空間座標が算出される。
(表示例)
【0057】
図9は、画像処理部が生成する画像の例を示す図である。図9は、図1の例と同様に、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠及びタイヤ幅軌跡の領域の枠が重ねられている。駐車枠で囲まれる駐車スペースには、障害物及び穴が存在する。
【0058】
車両100の運転者は、ディスプレイ242に表示された図9の画像により、直進して後退した場合に、タイヤが障害物や穴の上を通過するか否かを確認することができる。図9の例では、車両100の運転者は、タイヤが穴の上を通過するが障害物の上を通過しな
いことを認識できる。よって、運転者は、ステアリングを操作すること等により、穴を避けることができる。
【0059】
図10は、画像処理部が生成する画像の例を示す図である。図10は、図2の例と同様に、車両100が駐車枠に回転して後退する場合(操舵角φが0度でない場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠及びタイヤ幅軌跡の領域の枠が重ねられている。駐車枠で囲まれる駐車スペースには、障害物及び穴が存在する。
【0060】
車両100の運転者は、ディスプレイ242に表示された図10の画像により、このままの操舵角φで後退した場合に、タイヤが障害物や穴の上を通過するか否かを確認することができる。図10の例では、車両100の運転者は、タイヤが障害物及び穴の上を通過することを認識できる。よって、運転者は、ステアリングを操作すること等により、障害物及び穴を避けることができる。運転者は、タイヤ幅の表示により、タイヤの内側と外側に直近の障害物等に接触するか否かを見極めることができる。
【0061】
図11は、画像処理部が生成する画像の例を示す図である。図11は、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、タイヤ幅軌跡の領域の枠及びタイヤの立体画像が重ねられている。
【0062】
画像処理部240は、カメラ212が撮像した画像、走行予測車両枠、タイヤ幅軌跡の領域の枠に、さらに、タイヤの立体画像を重ねることができる。画像処理部240は、例えば、図6の動作フローのステップS108で、タイヤの立体画像を重ねることができる。タイヤの立体画像は、記憶部250に格納されるタイヤ形状情報から作成され得る。また、あらかじめ、タイヤをあらゆる方向から撮影した画像を撮影して記憶部250に格納しておいたものを、タイヤの立体画像として使用してもよい。画像処理部240は、タイヤ幅軌跡のタイヤの走行方向、タイヤ幅に合わせてタイヤの立体画像を調整する。
【0063】
タイヤの立体画像をカメラ212が撮像した画像に重ねることにより、運転者は、タイヤの向き等を容易に認識できる。
【0064】
図12は、画像処理部が生成する画像の例を示す図である。図12は、車両100が駐車枠に直進して後退する場合(操舵角φが0度でない場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、タイヤ幅軌跡の領域の枠及びタイヤの立体画像が重ねられている。
【0065】
表示されるタイヤの立体画像におけるタイヤの向きは、タイヤ幅軌跡の方向に合わせて変化する。即ち、タイヤの向きは、車両100の操舵角φによって、変化する。また、表示されるタイヤの立体画像におけるタイヤの大きさ(タイヤ幅、タイヤの直径など)は、タイヤ幅軌跡の幅に合わせて変化する。
【0066】
図13は、画像処理部が生成する画像の例を示す図である。図13は、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、及び、タイヤの立体画像が重ねられている。画像処理部240は、カメラ212が撮像した画像、及び、走行予測車両枠に、タイヤ幅軌跡の領域の枠を重ねずに、タイヤの立体画像を重ねてもよい。
【0067】
図14は、画像処理部が生成する画像の例を示す図である。図14は、車両100が駐車枠に直進して後退する場合(操舵角φが0度である場合)の例を示す図である。カメラ212が撮像した画像に、走行予測車両枠、タイヤ幅軌跡の領域の枠及びタイヤの立体画
像が重ねられている。タイヤの立体画像は、タイヤ幅軌跡の中間位置に表示されている。タイヤの立体画像を表示する位置は、ユーザの設定等により自由に変更され得る。タイヤの立体画像を表示する位置は、車両100からの距離などによって指定され得る。タイヤがタイヤ幅軌跡の上を転がって移動するように、タイヤの立体画像が表示されてもよい。また、運転者の操作によって、タイヤの立体画像がタイヤ幅軌跡上を自由に移動できるようにしてもよい。タイヤの立体画像の表示位置をタイヤ幅軌跡の上で変更することにより、運転者はタイヤがどの位置をどのように移動するかを認識することができる。また、タイヤの大きさと障害物の大きさとを相対的に視認できることにより、運転者は、タイヤが障害物を乗り越えることができるか否か判別することができる。
〈タイヤ幅の計測〉
【0068】
車両100のタイヤが交換されること等により、車両100に装着されるタイヤのタイヤ幅が変更される場合がある。このような場合、運転者は、記憶部250に格納されるタイヤ形状情報を書き換えることができる。また、運転支援装置200は、次のように、タイヤのタイヤ幅を実際に計測して求めてもよい。
【0069】
あらかじめ水などで車両100のタイヤを濡らした上で、車両100が、乾いた路面を、前方方向に直進する。運転支援装置100のカメラ212は、車両後方のタイヤ痕を撮像する。
【0070】
図15は、運転支援装置のカメラと路面との関係の例を示す図である。ここで、カメラ212の設置位置の路面からの高さを、高さh、カメラ212のレンズの方向と路面とのなす角を、角度θとする。カメラ212のレンズの中心からカメラのレンズ方向に伸ばした直線と路面との交点を点Cとする。カメラ212と点Cとの距離は、h/sinθとなる。
【0071】
図16は、カメラが撮影したタイヤ痕及び路面の画像の例である。画像の下から上に向かって、カメラ212からの実際の距離は遠くなる。画像処理部240は、カメラ212が撮像した画像から、タイヤ痕部分を抽出する。乾いた路面を濡れたタイヤで走行すると、路面とタイヤ痕とのコントラストが明確になるため、画像処理部240は、タイヤ痕を抽出しやすい。
【0072】
図16の画像内の点Cは、図15の点Cに対応する。図16の画像の点Cを通る横幅の実際の画角を角度2ψとする。点Cから画像の端(左端)までの実際の距離は、h/(sinθcosψ)となる。ここで、図16のように、点Cから画像の端(左端)までの画像におけるドット数を、A1、点Cから画像の左端までの直線がタイヤ痕を横切るドット数を、A2とする。画角ψが非常に小さい場合、実際のタイヤ幅は、次のように求められる。
【数2】
【0073】
画像に映る対象物の画像1ドット当たりの実際の距離は、カメラから対称物への距離に反比例する。カメラの画角、設置位置及び設置角度等は、既知である。これらのことを利用して、車両のタイヤの底面が作る平面及び車両の周辺が同一平面であると仮定すると、画像上のタイヤ痕(走行跡)からタイヤ幅がより正確に算出され得る。
【0074】
画像処理部240は、算出したタイヤのタイヤ幅をタイヤ形状情報として、記憶部250に格納する。画像処理部240は、タイヤ幅軌跡の算出の際、このタイヤ幅の情報を使用することができる。
【0075】
(変形例)
上記では、カメラ212が車両の後方に設置され、後輪のタイヤ幅の軌跡を表示する構成としたが、上記の場合と同様にして、カメラが車両の前方に設置され、前方に進行して駐車等を行う際に、前輪のタイヤ幅の軌跡を表示する構成とすることも可能である。この場合、図5の動作フローに相当する動作は、運転者が入力装置等により運転支援開始を指示すること等により開始され、運転支援終了を指示すること等により終了する。前輪の各タイヤ端の回転半径は、後輪の場合と同様に、操舵角φ、ホイールベースW、タイヤ幅w、車幅V等から算出される。
(実施形態の作用効果)
【0076】
運転支援装置200によると、車両の運転者は操舵角に応じたタイヤ幅及びタイヤの通過位置を把握できる。運転支援装置200によれば、車両の下の障害物の回避、車両の下の溝等への脱輪の防止が可能となる。また、タイヤの大きさと障害物の大きさとを相対的に視認できることにより、運転者は、タイヤが障害物を乗り越えることができるか否か判別することができる。
【符号の説明】
【0077】
100 車両
200 運転支援装置
210 カメラ画像取得部
212 カメラ
220 操舵角取得部
222 操舵角センサ
230 シフト位置取得部
232 シフト位置センサ
240 画像処理部
242 ディスプレイ
250 記憶部
【特許請求の範囲】
【請求項1】
車両が進行する際に運転者を支援する運転支援装置であって、
前記車両の前方又は後方の画像を撮像するカメラからの画像を取得するカメラ画像取得部と、
自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、
前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡の画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤ幅の軌跡の画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、
を備える運転支援装置。
【請求項2】
前記表示処理部は、更に、前記タイヤ幅の軌跡の画像上に、前記タイヤのタイヤ幅及びタイヤ幅の軌跡の方向に基づいて、前記タイヤの立体画像を重ねる
請求項1に記載の運転支援装置。
【請求項3】
車両が進行する際に運転者を支援する運転支援装置であって、
前記車両の前方又は後方画像を撮像するカメラからの画像を取得するカメラ画像取得部と、
自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、
前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡上に、前記タイヤのタイヤ幅及びタイヤ幅の軌跡の方向に基づいてタイヤの立体画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤの立体画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、
を備える運転支援装置。
【請求項1】
車両が進行する際に運転者を支援する運転支援装置であって、
前記車両の前方又は後方の画像を撮像するカメラからの画像を取得するカメラ画像取得部と、
自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、
前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡の画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤ幅の軌跡の画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、
を備える運転支援装置。
【請求項2】
前記表示処理部は、更に、前記タイヤ幅の軌跡の画像上に、前記タイヤのタイヤ幅及びタイヤ幅の軌跡の方向に基づいて、前記タイヤの立体画像を重ねる
請求項1に記載の運転支援装置。
【請求項3】
車両が進行する際に運転者を支援する運転支援装置であって、
前記車両の前方又は後方画像を撮像するカメラからの画像を取得するカメラ画像取得部と、
自車両の操舵角を検出する操舵角センサからの操舵角を取得する操舵角取得部と、
前記操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を前方又は後方に延長したタイヤ幅の軌跡上に、前記タイヤのタイヤ幅及びタイヤ幅の軌跡の方向に基づいてタイヤの立体画像を生成し、前記カメラが撮像した前記前方又は後方画像に前記タイヤの立体画像を重ねた画像を生成し、生成した画像を表示する表示部へ出力する表示処理部と、
を備える運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−116149(P2011−116149A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−272700(P2009−272700)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]