
運転支援装置
【課題】車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供すること。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援装置に関する。
【背景技術】
【0002】
従来、運転支援装置として、例えば特開平10−281776号公報に記載されるように、方向指示器による方向信号とヨーレートセンサによるヨーレート信号とに基づいて、走行中の車両の車線変更を判断する装置が知られている。この装置では、方向信号が左右いずれか一方向を示している間に、正面方向を移動していた車両が方向信号の示す方向と同方向に旋回を開始した後、逆方向に旋回し、再び車両の移動方向が正面に戻った時に、車線変更を行なったと判断している。
【0003】
そして、このような車線変更の判断により、走行中の車線がカーブであるか否かを判断し、更には、前方の走行車両が自車両と同一の車線を走行しているのか別の車線を走行しているのかを判断する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−281776号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の装置では、車両が車線変更を終えた後でなければ車線変更の判断ができないため、車線変更の開始時点を迅速に判断することは難しかった。また、ドライバによる方向指示器の操作タイミングが車線変更のタイミングとずれた場合には、車線変更の開始時点の判断精度が低下するおそれがあった。
【0006】
そこで本発明は、このような技術課題を解決するためになされたものであって、車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
すなわち本発明に係る運転支援装置は、方向指示器による方向指示を検出する方向指示検出手段と、自車両の走行軌跡の曲率である自車両曲率を演算し、自車両曲率の曲率変化速度を演算する自車両曲率演算手段と、方向指示検出手段により検出された方向指示と自車両曲率演算手段により演算された曲率変化速度とに基づいて自車両の車線変更開始時点を推定する車線変更推定手段と、を備え、車線変更推定手段は、方向指示検出手段によって所定の方向指示が検出された第1の時点における曲率変化速度が所定値以上である場合に、曲率変化速度が当該所定値であった第2の時点を車線変更開始時点と推定することを特徴とする。
【0008】
本発明に係る運転支援装置によれば、車線変更推定手段は、方向指示検出手段によって所定の方向指示が検出された第1の時点における曲率変化速度が所定値以上である場合、曲率変化速度が当該所定値であった第2の時点を車線変更開始時点と推定する。通常、自車両が車線変更を開始すると、自車両曲率及び曲率変化速度は漸増する。ここで、方向指示が検出された第1の時点において曲率変化速度が既に所定値以上となっている場合、ドライバによる方向指示器の操作が車線変更の開始よりも遅かったことが考えられる。
【0009】
この場合、車線変更推定手段は、曲率変化速度が所定値であった第2の時点を車線変更開始時点と推定するため、車線変更開始後に方向指示器が操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、方向指示が検出された時点で既に得られている走行情報(曲率変化速度)により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
【0010】
また、本発明に係る運転支援装置において、車線変更推定手段は、第1の時点と第2の時点との時間差が一定時間以上である場合には、第1の時点よりも当該一定時間前の第3の時点を車線変更開始時点と推定することが好ましい。
【0011】
第1の時点と第2の時点との時間差が一定時間以上である場合、すなわち、所定の方向指示が検出された第1の時点よりも、曲率変化速度が所定値であった第2の時点が一定時間以上前である場合、第2の時点では、ドライバは車線変更を開始してから大きく遅れて方向指示器を操作したと考えられる。上記の発明によれば、車線変更推定手段は、第1の時点よりも当該一定時間前の第3の時点を車線変更開始時点と推定するため、そのような例外的な運転がなされた場合であっても車線変更の開始時点を精度良く推定できる。
【0012】
また、本発明に係る運転支援装置において、車線変更推定手段により推定された車線変更開始時点における自車両曲率に基づいて、自車両が車線変更中に走行する道路の曲率である道路曲率を推定する道路曲率推定手段を備えることが好ましい。
【0013】
通常、車線変更中における自車両曲率は、車線を変更するためのハンドル操作により、道路曲率とは異なっている。一方、車線変更開始時点における自車両曲率は、道路曲率に近似していると考えられる。上記の発明によれば、道路曲率推定手段は、車線変更開始時点における自車両曲率に基づいて道路曲率を推定するため、道路曲率を精度良く推定することができる。
【0014】
また、本発明に係る運転支援装置において、道路曲率推定手段は、車線変更開始時点における自車両曲率を道路曲率とすることが好ましい。
【0015】
曲率が略一定なカーブ路を走行する場合、車線変更開始時点における自車両曲率は、車線変更中の道路曲率に略等しいと考えられる。上記の発明によれば、曲率が略一定なカーブ路を走行しながらの車線変更において、道路曲率の推定精度を高めることができる。ここで、曲率が略一定なカーブ路には、直線路も含まれる。
【0016】
また、本発明に係る運転支援装置において、自車両の方向である自車両方向を検出する自車両方向検出手段と、車線変更推定手段により推定された車線変更開始時点における自車両方向に基づいて、自車両が車線変更中に走行する道路の方向である道路方向を推定する道路方向推定手段と、を備えることが好ましい。
【0017】
自車両が走行する車線(以下、「自車線」という)を精度良く推定するためには、道路曲率のみならず、道路方向を推定することが望ましい。通常、車線変更中における自車両方向は、車線を変更するためのハンドル操作により、道路方向とは異なっている。一方、車線変更開始時点における自車両方向は、道路方向に近似していると考えられる。上記の発明によれば、道路方向推定手段は、車線変更開始時点における自車両方向に基づいて道路方向を推定するため、道路方向を精度良く推定できる。更には、自車線を精度良く推定できる。
【0018】
また、本発明に係る運転支援装置において、道路方向推定手段は、車線変更開始時点における自車両方向を道路方向とすることが好ましい。
【0019】
この発明によれば、直進路又は方向の変化が少ないカーブ路を走行しながらの車線変更において、道路方向の推定精度を高めることができる。
【発明の効果】
【0020】
本発明によれば、車線変更の開始時点を迅速に且つ精度良く推定することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る運転支援装置を示すブロック構成図である。
【図2】図1の運転支援装置による車線変更推定処理の処理手順を示すフローチャートである。
【図3】車線変更開始時点推定の説明図である。
【図4】車線変更開始時点推定の他の例の説明図である。
【図5】車線変更開始時点推定の更に他の例の説明図である。
【図6】図2中の車線変更終了推定の処理手順を示すフローチャートである。
【図7】車線変更終了時点推定の説明図である。
【図8】車線変更終了時点推定の他の例の説明図である。
【図9】車線変更終了時点推定の更に他の例の説明図である。
【図10】図1の運転支援装置による自車線中心推定処理の処理手順を示すフローチャートである。
【図11】自車線中心推定の説明図である。
【図12】自車線中心推定の他の例の説明図である。
【図13】自車線中心推定の更に他の例の説明図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明は省略する。
【0023】
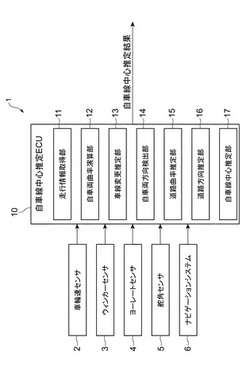
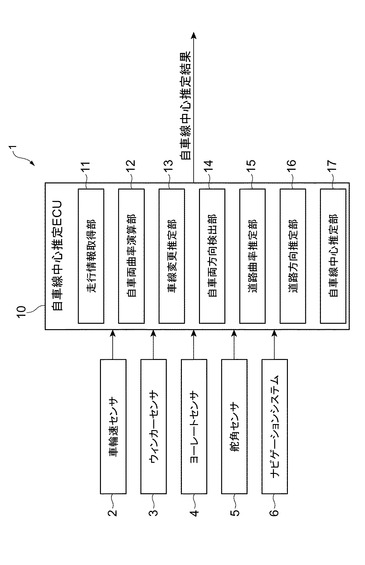
図1は、本発明の実施形態に係る運転支援装置を示すブロック構成図である。本実施形態に係る運転支援装置1は、自車両に搭載されるACC(アダプティブクルーズコントロール)システムに適用されて、道路を走行する自車両の車線変更開始時点及び車線変更終了時点を推定し、車線変更中の道路の方向及び曲率(以下、それぞれ「道路方向」及び「道路曲率」という)を推定するものである。また、運転支援装置1は、推定した道路方向及び道路曲率に基づいて、自車両の前方における自車線の中心線に平行で且つ自車両の前部における車両幅方向中心を通る曲線(以下、「自車線中心」という)を推定する。運転支援装置1により推定された自車線中心は、例えば、前方の走行車両が自車両と同一の車線を走行しているのか否かを判断するような運転支援に利用される。
【0024】
図1に示すように、運転支援装置1は、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、ナビゲーションシステム6、及び自車線中心推定ECU(Electronic Control Unit)10を備えている。車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれは、自車線中心推定ECU10に接続されている。また、自車線中心推定ECU10は、自車線中心の推定結果を用いて運転支援を行う運転支援ECU(図示せず)等に接続されている。
【0025】
車輪速センサ2は、各車輪に設けられて、車輪速パルスを検出するセンサである。車輪速センサ2は、各車輪における車輪速パルスをそれぞれ検出し、検出した車輪速パルスを示す車輪速パルス情報を自車線中心推定ECU10に出力する。
【0026】
ウィンカーセンサ3は、ドライバによって操作されるウィンカー(方向指示器)による方向指示、すなわち右ウィンカーON、左ウィンカーON、又はOFFを検出するセンサである。このウィンカーセンサ3は、方向指示検出手段に相当する。ウィンカーセンサ3は、方向指示を検出し、検出した方向指示を示すウィンカー情報を自車線中心推定ECU10に出力する。
【0027】
ヨーレートセンサ4は、自車両のヨーレートを検出するセンサである。ヨーレートセンサ4は、自車両のヨーレートを検出し、検出したヨーレートを示すヨーレート情報を自車線中心推定ECU10に出力する。
【0028】
舵角センサ5は、自車両のステアリングシャフト(図示せず)に設けられて、自車両のステアリング(図示せず)の操舵角を検出するセンサである。舵角センサ5は、操舵角の方向と大きさを検出し、検出した操舵角の方向と大きさを示す操舵角情報を自車線中心推定ECU10に出力する。
【0029】
ナビゲーションシステム6は、GPS(Global Positioning System)受信機を備え、自車両の方向である自車両方向を検出するものである。このナビゲーションシステム6は、自車両方向検出手段に相当する。ナビゲーションシステム6は、自車両方向を検出し、検出した自車両方向を示す自車両方向情報を自車線中心推定ECU10に出力する。なお、自車両方向は、車輪速センサ2や舵角センサ5による車輪速パルス情報、操舵角情報を用いて検出してもよい。
【0030】
自車線中心推定ECU10は、道路を走行する自車両の車線変更開始時点及び車線変更終了時点、更には道路方向及び道路曲率を推定することにより、自車線中心を推定するものである。この自車線中心推定ECU10は、例えばCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)を含むコンピュータを主体として構成されている。自車線中心推定ECU10は、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれから出力される情報を取得し、取得した各情報に基づいて所定の処理を実行することにより、上記の推定を行う。
【0031】
自車線中心推定ECU10は、走行情報取得部11、自車両曲率演算部12、車線変更推定部13、自車両方向検出部14、道路曲率推定部15、道路方向推定部16、及び自車線中心推定部17を備えている。
【0032】
走行情報取得部11は、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれから出力される情報を取得し、取得した各情報を走行情報として記憶する。ここで、走行情報取得部11は、各走行情報が検出された時刻に対応させて、各走行情報を記憶する。また、走行情報取得部11は、自車両曲率演算部12、車線変更推定部13、自車両方向検出部14、道路曲率推定部15、及び道路方向推定部16における処理のために、記憶した走行情報を出力する。
【0033】
自車両曲率演算部12は、走行情報取得部11に記憶された車輪速パルス情報、ヨーレート情報、及び操舵角情報に基づいて、各時刻における自車両の走行軌跡の曲率である自車両曲率を演算し、自車両曲率の変化速度である曲率変化速度を演算する自車両曲率演算手段である。自車両曲率演算部12は、演算した自車両曲率及び曲率変化速度を、各走行情報が検出された時刻に対応させて記憶する。
【0034】
また、自車両曲率演算部12は、車線変更開始時点における自車両曲率(以下、「車線変更開始曲率」という)を基準とする自車両曲率の変化量である曲率変化量を演算する。なお、自車両曲率演算部12によって演算・記憶される自車両曲率、曲率変化速度、及び曲率変化量は、自車両を基準として進行方向右方が正、進行方向左方が負とされる。
【0035】
車線変更推定部13は、ウィンカーセンサ3により検出された方向指示と自車両曲率演算部12により演算された曲率変化速度とに基づいて、自車両の車線変更開始時点を推定する車線変更推定手段である。また、車線変更推定部13は、ウィンカーセンサ3により検出された方向指示と自車両曲率演算部12により演算された自車両曲率とに基づいて自車両の車線変更終了時点を推定する。車線変更推定部13は、推定した車線変更開始時点及び車線変更終了時点を記憶する。更に、車線変更推定部13は、推定した車線変更開始時点に基づいて、車線変更開始曲率を推定し、記憶する。
【0036】
また、車線変更推定部13には、自車両が車線変更中であるか否かを示す車線変更中フラグが記憶されている。具体的には、この車線変更中フラグには、車線変更中であると推定される間、“1”がセットされる。また、それ以外の間には、“0”がセットされる。また、車線変更推定部13は、車線変更中フラグが“1”であるか“0”であるかを判断する。
【0037】
更にまた、車線変更推定部13には、後述の処理で用いられる各種の基準値が記憶されている。すなわち、車線変更推定部13には、基準曲率変化速度(所定値)VR0、一定時間T0,T1、曲率R1、及び曲率の所定範囲R2が記憶されている。基準曲率変化速度(所定値)VR0は、曲率変化速度についての基準値である。また、一定時間T0は、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅についての基準値であり、一定時間T1は、ウィンカーOFFが検出されてからの経過時間についての基準値である。更には、曲率R1及び曲率の所定範囲R2は、車線変更の終了時点を推定するための自車両曲率の基準値である。なお、これらの基準値は、予め定められた一定値であってもよいし、例えば車速等の走行状態に応じて適宜設定される値であってもよい。
【0038】
自車両方向検出部14は、走行情報取得部11に記憶された自車両方向情報に基づいて、車線変更開始時点における自車両方向(以下、「車線変更開始方向」という)を演算する自車両方向検出手段である。また、自車両方向検出部14は、演算した車線変更開始方向を基準とする自車両方向の変化量である方向変化量を演算する。なお、自車両方向検出部14によって演算される自車両方向及び方向変化量は、自車両を基準として進行方向右方が正、進行方向左方が負とされる。
【0039】
道路曲率推定部15は、車線変更推定部13により推定された車線変更開始曲率に基づいて、道路曲率を推定する道路曲率推定手段である。また、道路曲率推定部15には、後述の処理で用いられる一定値DR0が記憶されている。道路曲率推定部15は、自車両曲率演算部12によって演算された曲率変化量が一定値DR0未満であるか否かを判断する。この一定値DR0は、車線変更時に通常発生する自車両曲率の変化量として設定される値である。
【0040】
道路方向推定部16は、自車両方向検出部14により演算された車線変更開始方向に基づいて、道路方向を推定する道路方向推定手段である。また、道路方向推定部16には、後述の処理で用いられる一定値DY0が記憶されている。道路方向推定部16は、自車両方向検出部14によって演算された方向変化量が一定値DY0未満であるか否かを判断する。この一定値DY0は、車線変更時に通常発生する自車両方向の変化量として設定される値である。
【0041】
自車線中心推定部17は、道路曲率推定部15によって推定された道路曲率と、道路方向推定部16によって推定された道路方向とに基づいて自車線中心を推定する。自車線中心推定部17は、自車線中心の推定結果を示す情報を、運転支援ECU(図示せず)等に出力する。
【0042】
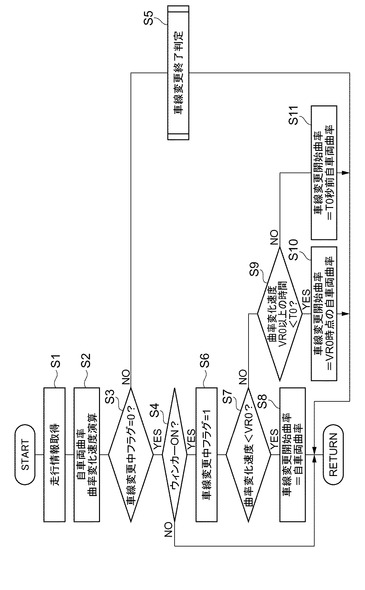
続いて、以上の構成を有する運転支援装置1の動作について説明する。まず、運転支援装置1による車線変更開始時点及び車線変更終了時点の推定処理について説明する。図2は、車線変更推定処理の処理手順を示すフローチャートである。図2における処理は、自車線中心推定ECU10によって所定の周期で繰り返し実行される。
【0043】
まず、ステップS1において、走行情報取得部11によって走行情報が取得される。ここでは、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれから出力される情報が取得され、逐次記憶される。
【0044】
次に、ステップS2に移行し、自車両曲率演算部12によって自車両曲率及び曲率変化速度が演算される。また、演算された自車両曲率及び曲率変化速度は、逐次記憶される。
【0045】
次に、ステップS3に移行し、車線変更推定部13によって車線変更中フラグに“0”がセットされているか否かが判断される。ここでは、車線変更推定部13のフラグが“0”又は“1”のいずれにセットされているかが判断される。
【0046】
ステップS3で車線変更中フラグに“0”がセットされていると判断されると、ステップS4に移行し、走行情報取得部11によってウィンカー(右ウィンカー又は左ウィンカー)のON/OFFが判断される。ここでは、走行情報取得部11に記憶されている最新のウィンカー情報が用いられる。
【0047】
一方、ステップS3で車線変更中フラグに“1”がセットされていると判断されると、ステップS5に移行し、車線変更終了判定が行われる。この車線変更終了判定の処理手順については後述する。
【0048】
ステップS4でウィンカーがONである(右ウィンカーON又は左ウィンカーON)と判断されると、ステップS6に移行し、車線変更推定部13によって車線変更中フラグに“1”がセットされる。なお、ステップS4でウィンカーがOFFであると判断された場合、図2に示す処理は終了される。
【0049】
次に、ステップS7に移行し、車線変更推定部13によって、曲率変化速度が基準曲率変化速度VR0未満であるか否かが判断される。ここでは、自車両曲率演算部12に記憶された曲率変化速度のうち、ウィンカーセンサ3によってウィンカーONが検出された時刻(第1の時点)における曲率変化速度が用いられる。
【0050】
ステップS7で曲率変化速度が基準曲率変化速度VR0未満であると判断されると、ステップS8に移行し、車線変更推定部13によって、ウィンカーONが検出された時刻が車線変更の開始時点であると推定され、その時刻における自車両曲率が車線変更開始曲率であると推定される。そして、図2に示す処理は終了される。
【0051】
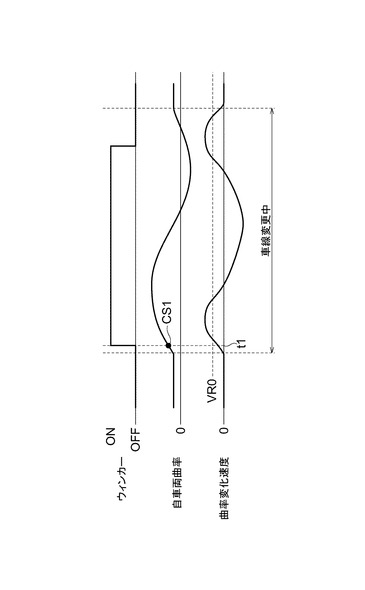
図3は、ステップS7,S8における車線変更開始時点推定の説明図である。図3には、上から順に、ウィンカーのON/OFF、自車両曲率、及び曲率変化速度の経時変化がそれぞれ示されている。なお、図3中の「車線変更中」は、車線変更が行われている真の時間帯を示している(図4、図5、及び図7〜9においても同様とする)。図3に示す例では、ウィンカーONが検出された時刻t1において、曲率変化速度は基準曲率変化速度VR0未満となっている。よって、ステップS8では、時刻t1における自車両曲率CS1が車線変更開始曲率であると推定される。このように、ステップS8での推定処理により、真の車線変更開始時点に近似した時刻t1が車線変更の開始時点であると推定される。
【0052】
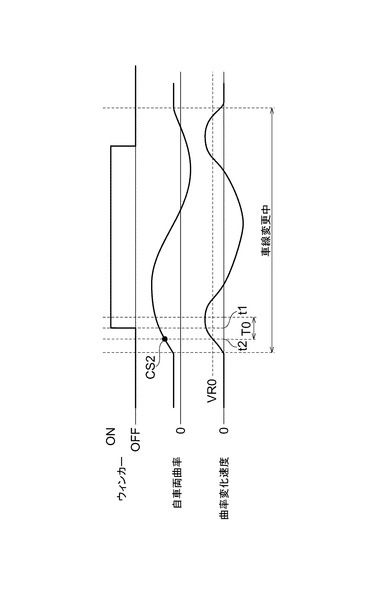
一方、ステップS7で曲率変化速度が基準曲率変化速度VR0以上であると判断されると、ステップS9に移行し、車線変更推定部13によって、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅が一定時間T0未満であるか否かが判断される。ここでは、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅は、曲率変化速度が基準曲率変化速度VR0であった時刻(第2の時点)と、ウィンカーONが検出された時刻(第1の時点)との時間差として演算される。
【0053】
ステップS9で曲率変化速度が基準曲率変化速度VR0以上となっている時間幅が一定時間T0未満であると判断されると、ステップS10に移行し、車線変更推定部13によって、曲率変化速度が基準曲率変化速度VR0であった時刻が車線変更の開始時点であると推定され、その時刻における自車両曲率が車線変更開始曲率であると推定される。そして、図2に示す処理は終了される。
【0054】
図4は、ステップS7,S9,S10における車線変更開始時点推定の説明図である。図4に示す例では、ウィンカーONが検出された時刻t1において、曲率変化速度は基準曲率変化速度VR0以上となっている。また、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅、すなわち時刻t1と時刻t2との時間差は、一定時間T0未満となっている。よって、ステップS10では、時刻t2における自車両曲率CS2が車線変更開始曲率とされる。このように、ステップS10での推定処理により、車線変更中にウィンカーを立ち上げるような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0055】
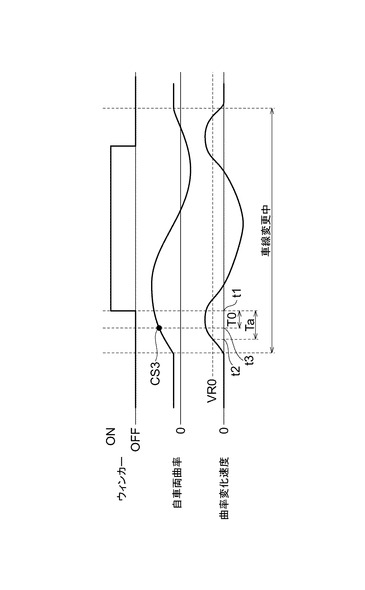
また、ステップS9で曲率変化速度が基準曲率変化速度VR0以上となっている時間幅が一定時間T0以上であると判断されると、ステップS11に移行し、車線変更推定部13によって、ウィンカーONが検出された時刻よりも一定時間T0前の時刻(第3の時点)が車線変更の開始時点であると推定され、その時刻における自車両曲率が車線変更開始曲率であると推定される。そして、図2に示す処理は終了される。
【0056】
図5は、ステップS7,S9,S11における車線変更開始時点推定の説明図である。図5に示す例では、ウィンカーONが検出された時刻t1において、曲率変化速度は基準曲率変化速度VR0以上となっている。また、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅、すなわち時刻t1と時刻t2との時間差Taは、一定時間T0以上となっている。よって、ステップS11では、時刻t1よりも一定時間T0前の時刻t3における自車両曲率CS3が車線変更開始曲率とされる。このように、ステップS11での推定処理により、車線変更の開始時点からかけ離れて(大きく遅れて)ウィンカーを立ち上げるような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0057】
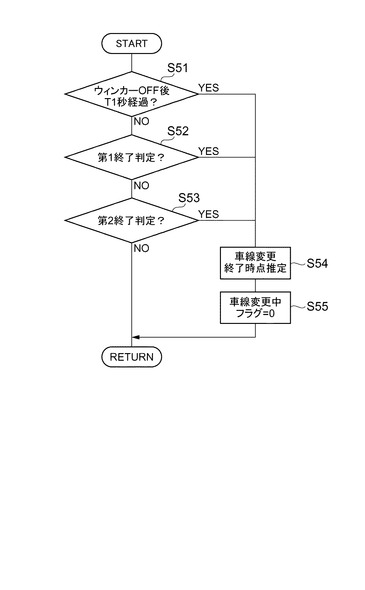
次に、ステップS5での車線変更終了時点の推定処理について説明する。図6は、図2中の車線変更終了推定の処理手順を示すフローチャートである。
【0058】
まず、ステップS51において、車線変更推定部13によって、ウィンカーOFFが検出されてから一定時間T1以上経過しているか否かが判断される。ここでは、走行情報取得部11に記憶されているウィンカー情報により、ウィンカーONが検出された後に初めてウィンカーOFFが検出された時刻から現在までの時間差が演算され、この時間差は一定時間T1以上であるか否かにより判断がなされる。
【0059】
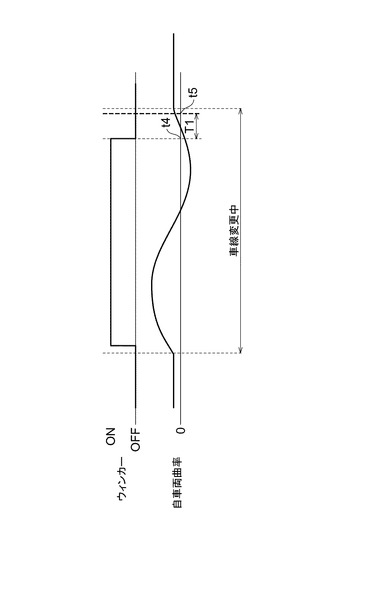
ステップS51でウィンカーOFFが検出されてから一定時間T1以上経過していると判断されると、ステップS54に移行し、車線変更推定部13によって車線変更終了時点が推定される。
【0060】
図7は、ステップS51からステップS54へ移行した場合の車線変更終了時点推定の説明図である。図7に示す例では、ウィンカーOFFが検出された時刻t4から一定時間T1以上が経過している。この場合、ステップS54では、ウィンカーOFFが検出されてから一定時間T1後の時刻t5が車線変更の終了時点であると推定される。このような推定処理により、車線変更中にウィンカーを消すような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0061】
ステップS51でウィンカーOFFが検出されてから一定時間T1以上経過していないと判断されると、ステップS52に移行し、車線変更推定部13によって、車線変更は終了したか否かが第1の終了判定により判断される。この第1の終了判定では、ステップS8(又はステップS10,S11)で推定された車線変更開始曲率CS1(又はCS2,CS3)から一定値以上、自車両曲率が左右方向に変化した後、再度、自車両曲率が車線変更開始曲率付近に戻ったか否かにより判断がなされる。
【0062】
ステップS52で第1の終了判定により車線変更は終了したと判断されると、ステップS54に移行し、車線変更推定部13によって車線変更終了時点が推定される。
【0063】
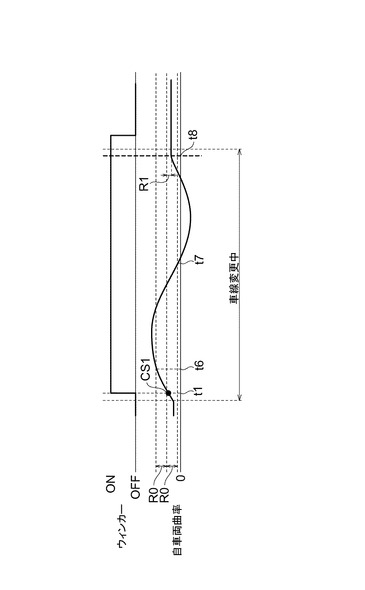
図8は、ステップS52からステップS54へ移行した場合の車線変更終了時点推定の説明図である。図8に示す例では、ステップS8で推定された車線変更開始曲率CS1から一定値R0以上、自車両曲率が左右方向に変化した後、再度、自車両曲率が車線変更開始曲率付近に戻っている。具体的には、時刻t6及び時刻t7において、自車両曲率が車線変更開始曲率CS1から一定値R0以上、右方(正側)及び左方(負側)に変化している。そして、その後時刻t8において、自車両曲率は、車線変更開始曲率CS1との差の絶対値が所定の曲率R1となるまで戻っている。この場合、ステップS54では、時刻t8が車線変更の終了時点であると推定される。このような推定処理により、車線変更が終了してからウィンカーを消すような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0064】
ステップS52で車線変更は終了していないと判定されると、ステップS53に移行し、車線変更推定部13によって、車線変更は終了したか否かが第2の終了判定により判断される。この第2の終了判定では、ステップS8(又はステップS10,S11)で推定された車線変更開始曲率CS1(又はCS2,CS3)から一定値以上、自車両曲率が左右方向に変化した後、自車両曲率が所定範囲内に所定時間収束したか否かにより判断がなされる。
【0065】
ステップS53で第2の終了判定により車線変更は終了したと判断されると、ステップS54に移行し、車線変更推定部13によって車線変更終了時点が推定される。
【0066】
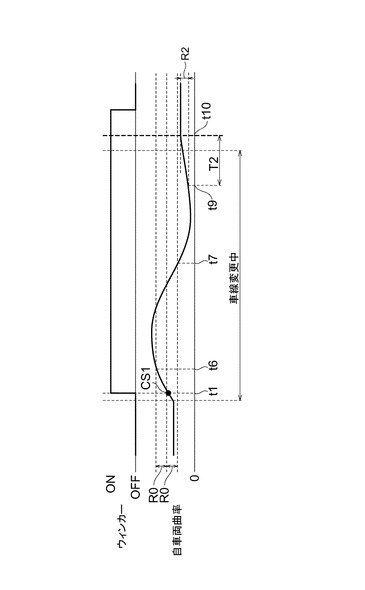
図9は、ステップS53からステップS54へ移行した場合の車線変更終了時点推定の説明図である。図9に示す例では、ステップS8で推定された車線変更開始曲率CS1から一定値R0以上、自車両曲率が左右方向に変化した後、自車両曲率が所定範囲内に所定時間収束している。具体的には、時刻t6及び時刻t7において、自車両曲率が車線変更開始曲率CS1から一定値R0以上、右方(正側)及び左方(負側)に変化している。そして、時刻t9から時刻t10まで所定時間T2が経過する間、自車両曲率は所定範囲R2内に収束している。この場合、ステップS54では、時刻t10が車線変更の終了時点であると推定される。このような推定処理により、車線変更中に実際の道路曲率が変化し、車線変更開始時点と車線変更終了時点とにおける自車両曲率が異なってしまう場合であっても、精度の良い推定が可能となる。
【0067】
次に、ステップS55に移行し、車線変更推定部13によって車線変更中フラグに“0”がセットされ、図6の車線変更終了推定処理は終了される。
【0068】
続いて、運転支援装置1による自車線中心の推定処理について説明する。図10は、自車線中心推定処理の処理手順を示すフローチャートである。図10における処理は、自車線中心推定ECU10によって所定の周期で繰り返し実行される。なお、この自車線中心推定処理は、図2の車線変更推定処理において取得若しくは演算される走行情報、曲率変化速度、車線変更開始時点、車線変更開始曲率等を用いて実行される。
【0069】
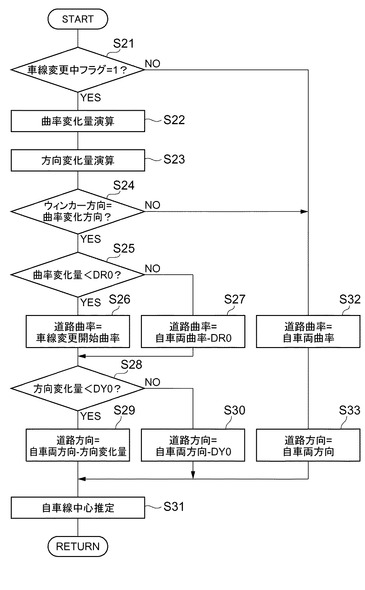
まず、ステップS21において、車線変更推定部13によって、車線変更中であるか否かの判断のために、車線変更中フラグに“1”がセットされているか否かが判断される。ここでは、車線変更推定部13のフラグは“0”又は“1”のいずれにセットされているかが判断される。
【0070】
ステップS21で車線変更中フラグに“1”がセットされていると判断されると、ステップS22に移行し、自車両曲率演算部12によって曲率変化量が演算される。ここでは、曲率変化量は、走行情報取得部11に記憶された最新の自車両曲率について演算される。この曲率変化量は、車線変更開始後に、自車両曲率がどの程度変化したかを示す値である。
【0071】
次に、ステップS23に移行し、自車両方向検出部14によって方向変化量が演算される。ここでは、走行情報取得部11に記憶された自車両方向情報に基づいて車線変更開始方向が演算され、走行情報取得部11に記憶された最新の自車両方向について方向変化量が演算される。この方向変化量は、車線変更開始後に、自車両方向がどの程度変化したかを示す値である。
【0072】
次に、ステップS24に移行し、自車両曲率演算部12によって、ウィンカー方向と曲率変化方向とは同じであるか否かが判断される。ここでは、走行情報取得部11に記憶される最新のウィンカー情報と自車両曲率演算部12が記憶する最新の曲率変化速度とに基づいて判断がなされる。例えば、ウィンカー情報に示される方向指示が右ウィンカーONであり、右方への曲率変化(正の曲率変化)が生じている場合、ウィンカー方向と曲率変化方向とは同じであると判断される。また、ウィンカー情報に示される方向指示が左ウィンカーONであり、右方への曲率変化が生じている場合、ウィンカー方向と曲率変化方向とは異なると判断される。
【0073】
ステップS24でウィンカー方向と曲率変化方向とは同じであると判断されると、ステップS25に移行し、道路曲率推定部15によって、ステップS22で演算された曲率変化量は一定値DR0未満であるか否かが判断される。
【0074】
ステップS25で曲率変化量が一定値DR0未満であると判断されると、ステップS26に移行し、道路曲率推定部15によって車線変更開始曲率が道路曲率であると推定される。すなわち、車線変更開始曲率が道路曲率に代入される。このような推定処理により、車線変更中に自車両曲率と道路曲率とが異なる場合であっても、道路曲率を精度良く推定することができる。
【0075】
一方、ステップS25で曲率変化量が一定値DR0以上であると判断されると、ステップS27に移行し、道路曲率推定部15によって、ステップS22で用いられた自車両曲率から一定値DR0を減じた値が道路曲率であると推定される。すなわち、自車両曲率から車線変更時に通常発生する自車両曲率変化量DR0を減じた値が道路曲率に代入される。更に言い換えれば、道路曲率推定部15は、車線変更開始曲率に、曲率変化量が一定値DR0を超えた分((曲率変化量)−(一定値DR0))を加えた値を道路曲率とする。このような推定処理により、車線変更中に道路曲率が変化する場合であっても、その変化分が車線変更開始曲率に加えられるため、道路曲率を精度良く推定することができる。
【0076】
ステップS26又はステップS27に続いて、ステップS28に移行し、道路方向推定部16によって、ステップS23で演算された方向変化量は一定値DY0未満であるか否かが判断される。
【0077】
ステップS28で方向変化量が一定値DY0未満であると判断されると、ステップS29に移行し、道路方向推定部16によって、自車両方向から方向変化量を減じた値が道路方向であると推定される。すなわち、車線変更開始方向が道路方向に代入される。このような推定処理により、車線変更中に自車両方向と道路方向とが異なる場合であっても、道路方向を精度良く推定することができる。
【0078】
一方、ステップS28で方向変化量が一定値DY0以上であると判断されると、ステップS30に移行し、道路方向推定部16によって、ステップS23で用いられた自車両方向から一定値DY0を減じた値が道路方向であると推定される。すなわち、自車両方向から車線変更時に通常発生する自車両方向変化量DY0を減じた値が道路方向に代入される。更に言い換えれば、道路方向推定部16は、車線変更開始方向に、方向変化量が一定値DY0を超えた分((方向変化量)−(一定値DY0))を加えた値を道路方向とする。このような推定処理により、車線変更中に道路方向が変化する場合であっても、その変化分が車線変更開始方向に加えられるため、道路方向を精度良く推定することができる。
【0079】
ステップS29又はステップS30に続いて、ステップS31に移行し、自車線中心推定部17によって自車線中心が推定される。ここでは、道路曲率推定部15によって推定された道路曲率と、道路方向推定部16によって推定された道路方向とに基づいて、自車線中心が推定される。そして、図10の自車線中心推定処理は終了される。
【0080】
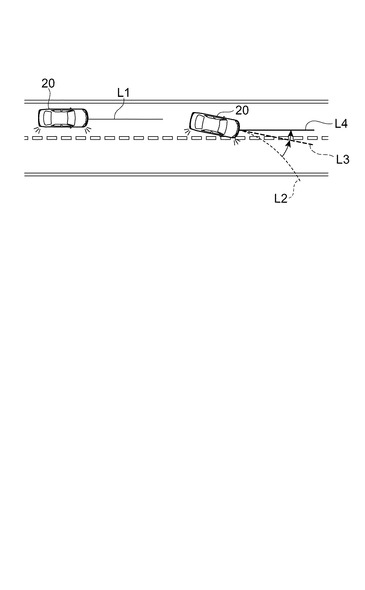
図11は、直線路を走行中に車線変更した場合の自車線中心推定の説明図である。図11に示す例では、自車両20は、直線路を走行中に右方(追越車線)へ車線変更している。図11では、左側に車線変更開始時点の自車両20を、右側に車線変更開始中の自車両20を示している(以下の図面においても同様とする)。図11に示すように、直進中の自車両20が車線変更を開始する際、車線変更開始曲率及び車線変更開始方向が、それぞれ道路曲率及び道路方向とされ(S26,S29)、自車線中心L1が推定される(S31)。
【0081】
また、車線変更中においても、走行する道路は直線路であるため、曲率変化量及び方向変化量はそれぞれ一定値DR0,DY0未満となり、車線変更開始曲率及び車線変更開始方向が、それぞれ道路曲率及び道路方向とされる(S26,S29)。そして、自車線中心L4が推定される(S31)。
【0082】
ここで、実際の自車両曲率に基づいて自車線中心を推定した場合、車線変更中の自車両曲率は道路曲率とは異なるため、図11中の自車線中心L2のように、実際の自車線中心からは大きくずれてしまう。また、道路曲率として車線変更開始曲率を用いた場合でも、実際の自車両方向に基づいて自車線中心を推定した場合、車線変更中の自車両方向は道路方向とは異なるため、図11中の自車線中心L3のように、実際の自車線中心からはずれてしまう。
【0083】
運転支援装置1では、曲率変化量及び方向変化量がそれぞれ一定値DR0,DY0未満の場合、道路曲率推定部15及び道路方向推定部16によって、車線変更開始曲率及び車線変更開始方向がそれぞれ道路曲率及び道路方向とされる。このため、自車線中心L2や自車線中心L3のようなずれを補正でき、自車線中心を精度良く推定できる。なお、曲率が略一定なカーブ路を走行中に車線変更する場合であっても、同様の作用効果が得られる。
【0084】
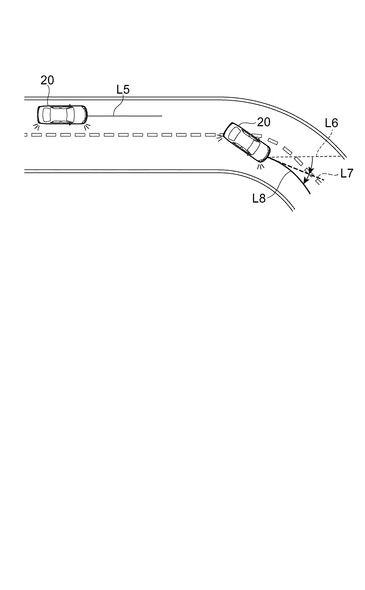
図12は、車線変更中に道路曲率及び道路方向が変化した場合の自車線中心推定の説明図である。図12に示す例では、自車両20は、直線路を走行中に右方(追越車線)へ車線変更を開始し、その後、車線変更中に道路は右方へカーブしている。図12に示す自車線中心L5は、図11に示した場合と同様に推定される。更に、車線変更中に道路がカーブ路となるため、曲率変化量及び方向変化量はいずれも一定値DR0,DY0以上となり、実際の自車両曲率及び自車両方向から一定値DR0,DY0をそれぞれ減じた値が、道路曲率及び道路方向であると推定される(S27,S30)。そして、自車線中心L8が推定される(S31)。
【0085】
ここで、図11に示した方法と同様の手順で自車線中心を推定した場合、車線変更中に道路曲率が変化しているため、図12中の自車線中心L6のように、実際の自車線中心からは大きくずれてしまう。また、道路方向として実際の自車両方向から一定値DY0を減じた値を用いた場合でも、道路曲率として車線変更開始曲率を用いた場合、車線変更中の自車両曲率は車線変更開始曲率から一定値DR0以上変化しているため、図12中の自車線中心L7のように実際の自車線中心からはずれてしまう。
【0086】
運転支援装置1では、曲率変化量及び方向変化量がいずれも一定値DR0,DY0以上の場合、道路曲率推定部15及び道路方向推定部16によって、自車両曲率及び自車両方向から一定値DR0,DY0をそれぞれ減じた値が道路曲率及び道路方向とされる。このため、自車線中心L6や自車線中心L7のようなずれを補正でき、自車線中心を精度良く推定できる。
【0087】
一方、ステップS21で車線変更中フラグに“0”がセットされていると判断されたり、ステップS24でウィンカー方向と曲率変化方向とは異なると判断されると、ステップS32に移行し、道路曲率推定部15によって、走行情報取得部11に記憶された最新の自車両曲率が道路曲率であると推定される。すなわち、その最新の自車両曲率が道路曲率に代入される。このような推定処理により、車線変更中に車線変更方向とは逆方向に実際の道路曲率が変化する場合であっても、道路曲率を精度良く推定することができる。
【0088】
次に、ステップS33に移行し、道路方向推定部16によって、走行情報取得部11に記憶された最新の自車両方向が道路方向であると推定される。すなわち、その最新の自車両方向が道路方向に代入される。このような推定処理により、車線変更中に車線変更方向とは逆方向に実際の道路方向が変化する場合であっても、道路方向を精度良く推定することができる。
【0089】
次に、ステップS31に移行し、自車線中心推定部17によって自車線中心が推定され、図10の自車線中心推定処理は終了される。
【0090】
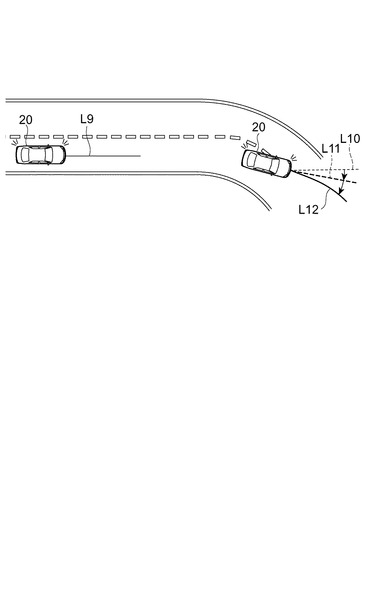
図13は、車線変更中に、車線変更方向とは逆方向に道路曲率及び道路方向が変化した場合の自車線中心推定の説明図である。図13に示す例では、自車両20は、直線路を走行中に左方(走行車線)へ車線変更を開始し、その後、車線変更中に道路は右方へカーブしている。図13に示す自車線中心L9は、図11に示した場合と同様に推定される。更に、車線変更中に、道路が車線変更方向とは逆方向のカーブ路となるため、ウィンカー方向と曲率変化方向とは異なると判断され(S24)、自車両曲率及び自車両方向がそれぞれ道路曲率及び道路方向であると推定される(S32,S33)。そして、自車線中心L12が推定される(S31)。
【0091】
ここで、図11や図12に示した方法と同様の手順で自車線中心を推定した場合、車線変更中に、車線変更方向とは逆方向に道路曲率及び道路方向が変化しているため、図13中の自車線中心L10のように、実際の自車線中心からは大きくずれてしまう。また、道路方向として実際の自車両方向を用いた場合でも、車線変更開始曲率に基づいて自車線中心を推定した場合、図13中の自車線中心L11のように、実際の自車線中心からはずれてしまう。
【0092】
運転支援装置1では、ウィンカー方向と曲率変化方向とは異なると判断された場合、道路曲率推定部15及び道路方向推定部16によって、自車両曲率及び自車両方向がそれぞれ道路曲率及び道路方向とされる。このため、曲率変化量や方向変化量が少ない場合でも、自車線中心を精度良く推定できる。なお、車線変更中でない場合にも、同様にして、自車両曲率及び自車両方向がそれぞれ道路曲率及び道路方向であると推定されるため、自車線中心を精度良く推定できる。
【0093】
以上の一連の処理によって、運転支援装置1による車線変更推定処理及び自車線中心推定処理が実行される。
【0094】
このように、本実施形態に係る運転支援装置1によれば、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点t1における曲率変化速度が基準曲率変化速度VR0以上である場合、曲率変化速度が基準曲率変化速度VR0であった第2の時点t2を車線変更開始時点と推定する(図4参照)。通常、自車両が車線変更を開始すると、自車両曲率及び曲率変化速度は漸増する。ここで、ウィンカーONが検出された第1の時点t1において曲率変化速度が既に基準曲率変化速度VR0以上となっている場合、ドライバによるウィンカーの操作が車線変更の開始よりも遅かったことが考えられる。
【0095】
この場合、車線変更推定部13は、曲率変化速度が基準曲率変化速度VR0であった第2の時点t2を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報(曲率変化速度)により車線変更の開始時点t2を推定するため、車線変更の開始時点t2を迅速に推定できる。
【0096】
また、第1の時点t1と第2の時点t2との時間差Taが一定時間T0以上である場合、すなわち、ウィンカーONが検出された第1の時点t1よりも、曲率変化速度が基準曲率変化速度VR0であった第2の時点t2が一定時間T0以上前である場合、第2の時点t2では、ドライバは車線変更を開始してから大きく遅れてウィンカーを操作したと考えられる。運転支援装置1によれば、車線変更推定部13は、第1の時点t1よりも一定時間T0前の第3の時点t3を車線変更開始時点と推定するため、そのような例外的な運転がなされた場合であっても車線変更の開始時点を精度良く推定できる(図5参照)。
【0097】
また、通常、車線変更中における自車両曲率は、車線を変更するためのハンドル操作により、道路曲率とは異なっている。一方、車線変更開始時点における自車両曲率は、道路曲率に近似していると考えられる。運転支援装置1によれば、道路曲率推定部15は、車線変更開始時点における自車両曲率に基づいて道路曲率を推定するため、道路曲率を精度良く推定することができる。
【0098】
また、曲率が略一定なカーブ路(直進路を含む)を走行する場合、車線変更開始時点における自車両曲率は、車線変更中の道路曲率に略等しいと考えられる。運転支援装置1によれば、曲率が略一定なカーブ路を走行しながらの車線変更において、道路曲率の推定精度を高めることができる。
【0099】
また、自車線中心を精度良く推定するためには、道路曲率のみならず、道路方向を推定することが望ましい。通常、車線変更中における自車両方向は、車線を変更するためのハンドル操作により、道路方向とは異なっている。一方、車線変更開始時点における自車両方向は、道路方向に近似していると考えられる。運転支援装置1によれば、道路方向推定手段は、車線変更開始時点における自車両方向に基づいて道路方向を推定するため、道路方向を精度良く推定できる。更には、自車線中心L4を精度良く推定できる(図11参照)。
【0100】
また、運転支援装置1によれば、直進路又は方向の変化が少ないカーブ路を走行しながらの車線変更において、道路方向の推定精度を高めることができる。
【0101】
以上、本発明の実施形態について詳述したが、本発明は上記実施形態に限られるものではない。例えば、上記実施形態では、車線変更の推定結果が自車線中心の推定に用いられる場合について説明したが、隣接する車線を走行する他車両との衝突防止のための運転支援等、他の運転支援に用いられてもよい。
【符号の説明】
【0102】
1…運転支援装置、3…ウィンカーセンサ(方向指示検出手段)、12…自車両曲率演算部(自車両曲率演算手段)、13…車線変更推定部(車線変更推定部手段)、14…自車両方向検出部(自車両方向検出手段)15…道路曲率推定部(道路曲率推定手段)、16…道路方向推定部(道路方向推定手段)、20…自車両、T0…一定時間、t1…時刻(第1の時点)、t2…時刻(第2の時点)、t3…時刻(第3の時点)、Ta…時間差、VR0…基準曲率変化速度(所定値)。
【技術分野】
【0001】
本発明は、運転支援装置に関する。
【背景技術】
【0002】
従来、運転支援装置として、例えば特開平10−281776号公報に記載されるように、方向指示器による方向信号とヨーレートセンサによるヨーレート信号とに基づいて、走行中の車両の車線変更を判断する装置が知られている。この装置では、方向信号が左右いずれか一方向を示している間に、正面方向を移動していた車両が方向信号の示す方向と同方向に旋回を開始した後、逆方向に旋回し、再び車両の移動方向が正面に戻った時に、車線変更を行なったと判断している。
【0003】
そして、このような車線変更の判断により、走行中の車線がカーブであるか否かを判断し、更には、前方の走行車両が自車両と同一の車線を走行しているのか別の車線を走行しているのかを判断する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−281776号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の装置では、車両が車線変更を終えた後でなければ車線変更の判断ができないため、車線変更の開始時点を迅速に判断することは難しかった。また、ドライバによる方向指示器の操作タイミングが車線変更のタイミングとずれた場合には、車線変更の開始時点の判断精度が低下するおそれがあった。
【0006】
そこで本発明は、このような技術課題を解決するためになされたものであって、車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
すなわち本発明に係る運転支援装置は、方向指示器による方向指示を検出する方向指示検出手段と、自車両の走行軌跡の曲率である自車両曲率を演算し、自車両曲率の曲率変化速度を演算する自車両曲率演算手段と、方向指示検出手段により検出された方向指示と自車両曲率演算手段により演算された曲率変化速度とに基づいて自車両の車線変更開始時点を推定する車線変更推定手段と、を備え、車線変更推定手段は、方向指示検出手段によって所定の方向指示が検出された第1の時点における曲率変化速度が所定値以上である場合に、曲率変化速度が当該所定値であった第2の時点を車線変更開始時点と推定することを特徴とする。
【0008】
本発明に係る運転支援装置によれば、車線変更推定手段は、方向指示検出手段によって所定の方向指示が検出された第1の時点における曲率変化速度が所定値以上である場合、曲率変化速度が当該所定値であった第2の時点を車線変更開始時点と推定する。通常、自車両が車線変更を開始すると、自車両曲率及び曲率変化速度は漸増する。ここで、方向指示が検出された第1の時点において曲率変化速度が既に所定値以上となっている場合、ドライバによる方向指示器の操作が車線変更の開始よりも遅かったことが考えられる。
【0009】
この場合、車線変更推定手段は、曲率変化速度が所定値であった第2の時点を車線変更開始時点と推定するため、車線変更開始後に方向指示器が操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、方向指示が検出された時点で既に得られている走行情報(曲率変化速度)により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
【0010】
また、本発明に係る運転支援装置において、車線変更推定手段は、第1の時点と第2の時点との時間差が一定時間以上である場合には、第1の時点よりも当該一定時間前の第3の時点を車線変更開始時点と推定することが好ましい。
【0011】
第1の時点と第2の時点との時間差が一定時間以上である場合、すなわち、所定の方向指示が検出された第1の時点よりも、曲率変化速度が所定値であった第2の時点が一定時間以上前である場合、第2の時点では、ドライバは車線変更を開始してから大きく遅れて方向指示器を操作したと考えられる。上記の発明によれば、車線変更推定手段は、第1の時点よりも当該一定時間前の第3の時点を車線変更開始時点と推定するため、そのような例外的な運転がなされた場合であっても車線変更の開始時点を精度良く推定できる。
【0012】
また、本発明に係る運転支援装置において、車線変更推定手段により推定された車線変更開始時点における自車両曲率に基づいて、自車両が車線変更中に走行する道路の曲率である道路曲率を推定する道路曲率推定手段を備えることが好ましい。
【0013】
通常、車線変更中における自車両曲率は、車線を変更するためのハンドル操作により、道路曲率とは異なっている。一方、車線変更開始時点における自車両曲率は、道路曲率に近似していると考えられる。上記の発明によれば、道路曲率推定手段は、車線変更開始時点における自車両曲率に基づいて道路曲率を推定するため、道路曲率を精度良く推定することができる。
【0014】
また、本発明に係る運転支援装置において、道路曲率推定手段は、車線変更開始時点における自車両曲率を道路曲率とすることが好ましい。
【0015】
曲率が略一定なカーブ路を走行する場合、車線変更開始時点における自車両曲率は、車線変更中の道路曲率に略等しいと考えられる。上記の発明によれば、曲率が略一定なカーブ路を走行しながらの車線変更において、道路曲率の推定精度を高めることができる。ここで、曲率が略一定なカーブ路には、直線路も含まれる。
【0016】
また、本発明に係る運転支援装置において、自車両の方向である自車両方向を検出する自車両方向検出手段と、車線変更推定手段により推定された車線変更開始時点における自車両方向に基づいて、自車両が車線変更中に走行する道路の方向である道路方向を推定する道路方向推定手段と、を備えることが好ましい。
【0017】
自車両が走行する車線(以下、「自車線」という)を精度良く推定するためには、道路曲率のみならず、道路方向を推定することが望ましい。通常、車線変更中における自車両方向は、車線を変更するためのハンドル操作により、道路方向とは異なっている。一方、車線変更開始時点における自車両方向は、道路方向に近似していると考えられる。上記の発明によれば、道路方向推定手段は、車線変更開始時点における自車両方向に基づいて道路方向を推定するため、道路方向を精度良く推定できる。更には、自車線を精度良く推定できる。
【0018】
また、本発明に係る運転支援装置において、道路方向推定手段は、車線変更開始時点における自車両方向を道路方向とすることが好ましい。
【0019】
この発明によれば、直進路又は方向の変化が少ないカーブ路を走行しながらの車線変更において、道路方向の推定精度を高めることができる。
【発明の効果】
【0020】
本発明によれば、車線変更の開始時点を迅速に且つ精度良く推定することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る運転支援装置を示すブロック構成図である。
【図2】図1の運転支援装置による車線変更推定処理の処理手順を示すフローチャートである。
【図3】車線変更開始時点推定の説明図である。
【図4】車線変更開始時点推定の他の例の説明図である。
【図5】車線変更開始時点推定の更に他の例の説明図である。
【図6】図2中の車線変更終了推定の処理手順を示すフローチャートである。
【図7】車線変更終了時点推定の説明図である。
【図8】車線変更終了時点推定の他の例の説明図である。
【図9】車線変更終了時点推定の更に他の例の説明図である。
【図10】図1の運転支援装置による自車線中心推定処理の処理手順を示すフローチャートである。
【図11】自車線中心推定の説明図である。
【図12】自車線中心推定の他の例の説明図である。
【図13】自車線中心推定の更に他の例の説明図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明は省略する。
【0023】
図1は、本発明の実施形態に係る運転支援装置を示すブロック構成図である。本実施形態に係る運転支援装置1は、自車両に搭載されるACC(アダプティブクルーズコントロール)システムに適用されて、道路を走行する自車両の車線変更開始時点及び車線変更終了時点を推定し、車線変更中の道路の方向及び曲率(以下、それぞれ「道路方向」及び「道路曲率」という)を推定するものである。また、運転支援装置1は、推定した道路方向及び道路曲率に基づいて、自車両の前方における自車線の中心線に平行で且つ自車両の前部における車両幅方向中心を通る曲線(以下、「自車線中心」という)を推定する。運転支援装置1により推定された自車線中心は、例えば、前方の走行車両が自車両と同一の車線を走行しているのか否かを判断するような運転支援に利用される。
【0024】
図1に示すように、運転支援装置1は、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、ナビゲーションシステム6、及び自車線中心推定ECU(Electronic Control Unit)10を備えている。車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれは、自車線中心推定ECU10に接続されている。また、自車線中心推定ECU10は、自車線中心の推定結果を用いて運転支援を行う運転支援ECU(図示せず)等に接続されている。
【0025】
車輪速センサ2は、各車輪に設けられて、車輪速パルスを検出するセンサである。車輪速センサ2は、各車輪における車輪速パルスをそれぞれ検出し、検出した車輪速パルスを示す車輪速パルス情報を自車線中心推定ECU10に出力する。
【0026】
ウィンカーセンサ3は、ドライバによって操作されるウィンカー(方向指示器)による方向指示、すなわち右ウィンカーON、左ウィンカーON、又はOFFを検出するセンサである。このウィンカーセンサ3は、方向指示検出手段に相当する。ウィンカーセンサ3は、方向指示を検出し、検出した方向指示を示すウィンカー情報を自車線中心推定ECU10に出力する。
【0027】
ヨーレートセンサ4は、自車両のヨーレートを検出するセンサである。ヨーレートセンサ4は、自車両のヨーレートを検出し、検出したヨーレートを示すヨーレート情報を自車線中心推定ECU10に出力する。
【0028】
舵角センサ5は、自車両のステアリングシャフト(図示せず)に設けられて、自車両のステアリング(図示せず)の操舵角を検出するセンサである。舵角センサ5は、操舵角の方向と大きさを検出し、検出した操舵角の方向と大きさを示す操舵角情報を自車線中心推定ECU10に出力する。
【0029】
ナビゲーションシステム6は、GPS(Global Positioning System)受信機を備え、自車両の方向である自車両方向を検出するものである。このナビゲーションシステム6は、自車両方向検出手段に相当する。ナビゲーションシステム6は、自車両方向を検出し、検出した自車両方向を示す自車両方向情報を自車線中心推定ECU10に出力する。なお、自車両方向は、車輪速センサ2や舵角センサ5による車輪速パルス情報、操舵角情報を用いて検出してもよい。
【0030】
自車線中心推定ECU10は、道路を走行する自車両の車線変更開始時点及び車線変更終了時点、更には道路方向及び道路曲率を推定することにより、自車線中心を推定するものである。この自車線中心推定ECU10は、例えばCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)を含むコンピュータを主体として構成されている。自車線中心推定ECU10は、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれから出力される情報を取得し、取得した各情報に基づいて所定の処理を実行することにより、上記の推定を行う。
【0031】
自車線中心推定ECU10は、走行情報取得部11、自車両曲率演算部12、車線変更推定部13、自車両方向検出部14、道路曲率推定部15、道路方向推定部16、及び自車線中心推定部17を備えている。
【0032】
走行情報取得部11は、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれから出力される情報を取得し、取得した各情報を走行情報として記憶する。ここで、走行情報取得部11は、各走行情報が検出された時刻に対応させて、各走行情報を記憶する。また、走行情報取得部11は、自車両曲率演算部12、車線変更推定部13、自車両方向検出部14、道路曲率推定部15、及び道路方向推定部16における処理のために、記憶した走行情報を出力する。
【0033】
自車両曲率演算部12は、走行情報取得部11に記憶された車輪速パルス情報、ヨーレート情報、及び操舵角情報に基づいて、各時刻における自車両の走行軌跡の曲率である自車両曲率を演算し、自車両曲率の変化速度である曲率変化速度を演算する自車両曲率演算手段である。自車両曲率演算部12は、演算した自車両曲率及び曲率変化速度を、各走行情報が検出された時刻に対応させて記憶する。
【0034】
また、自車両曲率演算部12は、車線変更開始時点における自車両曲率(以下、「車線変更開始曲率」という)を基準とする自車両曲率の変化量である曲率変化量を演算する。なお、自車両曲率演算部12によって演算・記憶される自車両曲率、曲率変化速度、及び曲率変化量は、自車両を基準として進行方向右方が正、進行方向左方が負とされる。
【0035】
車線変更推定部13は、ウィンカーセンサ3により検出された方向指示と自車両曲率演算部12により演算された曲率変化速度とに基づいて、自車両の車線変更開始時点を推定する車線変更推定手段である。また、車線変更推定部13は、ウィンカーセンサ3により検出された方向指示と自車両曲率演算部12により演算された自車両曲率とに基づいて自車両の車線変更終了時点を推定する。車線変更推定部13は、推定した車線変更開始時点及び車線変更終了時点を記憶する。更に、車線変更推定部13は、推定した車線変更開始時点に基づいて、車線変更開始曲率を推定し、記憶する。
【0036】
また、車線変更推定部13には、自車両が車線変更中であるか否かを示す車線変更中フラグが記憶されている。具体的には、この車線変更中フラグには、車線変更中であると推定される間、“1”がセットされる。また、それ以外の間には、“0”がセットされる。また、車線変更推定部13は、車線変更中フラグが“1”であるか“0”であるかを判断する。
【0037】
更にまた、車線変更推定部13には、後述の処理で用いられる各種の基準値が記憶されている。すなわち、車線変更推定部13には、基準曲率変化速度(所定値)VR0、一定時間T0,T1、曲率R1、及び曲率の所定範囲R2が記憶されている。基準曲率変化速度(所定値)VR0は、曲率変化速度についての基準値である。また、一定時間T0は、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅についての基準値であり、一定時間T1は、ウィンカーOFFが検出されてからの経過時間についての基準値である。更には、曲率R1及び曲率の所定範囲R2は、車線変更の終了時点を推定するための自車両曲率の基準値である。なお、これらの基準値は、予め定められた一定値であってもよいし、例えば車速等の走行状態に応じて適宜設定される値であってもよい。
【0038】
自車両方向検出部14は、走行情報取得部11に記憶された自車両方向情報に基づいて、車線変更開始時点における自車両方向(以下、「車線変更開始方向」という)を演算する自車両方向検出手段である。また、自車両方向検出部14は、演算した車線変更開始方向を基準とする自車両方向の変化量である方向変化量を演算する。なお、自車両方向検出部14によって演算される自車両方向及び方向変化量は、自車両を基準として進行方向右方が正、進行方向左方が負とされる。
【0039】
道路曲率推定部15は、車線変更推定部13により推定された車線変更開始曲率に基づいて、道路曲率を推定する道路曲率推定手段である。また、道路曲率推定部15には、後述の処理で用いられる一定値DR0が記憶されている。道路曲率推定部15は、自車両曲率演算部12によって演算された曲率変化量が一定値DR0未満であるか否かを判断する。この一定値DR0は、車線変更時に通常発生する自車両曲率の変化量として設定される値である。
【0040】
道路方向推定部16は、自車両方向検出部14により演算された車線変更開始方向に基づいて、道路方向を推定する道路方向推定手段である。また、道路方向推定部16には、後述の処理で用いられる一定値DY0が記憶されている。道路方向推定部16は、自車両方向検出部14によって演算された方向変化量が一定値DY0未満であるか否かを判断する。この一定値DY0は、車線変更時に通常発生する自車両方向の変化量として設定される値である。
【0041】
自車線中心推定部17は、道路曲率推定部15によって推定された道路曲率と、道路方向推定部16によって推定された道路方向とに基づいて自車線中心を推定する。自車線中心推定部17は、自車線中心の推定結果を示す情報を、運転支援ECU(図示せず)等に出力する。
【0042】
続いて、以上の構成を有する運転支援装置1の動作について説明する。まず、運転支援装置1による車線変更開始時点及び車線変更終了時点の推定処理について説明する。図2は、車線変更推定処理の処理手順を示すフローチャートである。図2における処理は、自車線中心推定ECU10によって所定の周期で繰り返し実行される。
【0043】
まず、ステップS1において、走行情報取得部11によって走行情報が取得される。ここでは、車輪速センサ2、ウィンカーセンサ3、ヨーレートセンサ4、舵角センサ5、及びナビゲーションシステム6のそれぞれから出力される情報が取得され、逐次記憶される。
【0044】
次に、ステップS2に移行し、自車両曲率演算部12によって自車両曲率及び曲率変化速度が演算される。また、演算された自車両曲率及び曲率変化速度は、逐次記憶される。
【0045】
次に、ステップS3に移行し、車線変更推定部13によって車線変更中フラグに“0”がセットされているか否かが判断される。ここでは、車線変更推定部13のフラグが“0”又は“1”のいずれにセットされているかが判断される。
【0046】
ステップS3で車線変更中フラグに“0”がセットされていると判断されると、ステップS4に移行し、走行情報取得部11によってウィンカー(右ウィンカー又は左ウィンカー)のON/OFFが判断される。ここでは、走行情報取得部11に記憶されている最新のウィンカー情報が用いられる。
【0047】
一方、ステップS3で車線変更中フラグに“1”がセットされていると判断されると、ステップS5に移行し、車線変更終了判定が行われる。この車線変更終了判定の処理手順については後述する。
【0048】
ステップS4でウィンカーがONである(右ウィンカーON又は左ウィンカーON)と判断されると、ステップS6に移行し、車線変更推定部13によって車線変更中フラグに“1”がセットされる。なお、ステップS4でウィンカーがOFFであると判断された場合、図2に示す処理は終了される。
【0049】
次に、ステップS7に移行し、車線変更推定部13によって、曲率変化速度が基準曲率変化速度VR0未満であるか否かが判断される。ここでは、自車両曲率演算部12に記憶された曲率変化速度のうち、ウィンカーセンサ3によってウィンカーONが検出された時刻(第1の時点)における曲率変化速度が用いられる。
【0050】
ステップS7で曲率変化速度が基準曲率変化速度VR0未満であると判断されると、ステップS8に移行し、車線変更推定部13によって、ウィンカーONが検出された時刻が車線変更の開始時点であると推定され、その時刻における自車両曲率が車線変更開始曲率であると推定される。そして、図2に示す処理は終了される。
【0051】
図3は、ステップS7,S8における車線変更開始時点推定の説明図である。図3には、上から順に、ウィンカーのON/OFF、自車両曲率、及び曲率変化速度の経時変化がそれぞれ示されている。なお、図3中の「車線変更中」は、車線変更が行われている真の時間帯を示している(図4、図5、及び図7〜9においても同様とする)。図3に示す例では、ウィンカーONが検出された時刻t1において、曲率変化速度は基準曲率変化速度VR0未満となっている。よって、ステップS8では、時刻t1における自車両曲率CS1が車線変更開始曲率であると推定される。このように、ステップS8での推定処理により、真の車線変更開始時点に近似した時刻t1が車線変更の開始時点であると推定される。
【0052】
一方、ステップS7で曲率変化速度が基準曲率変化速度VR0以上であると判断されると、ステップS9に移行し、車線変更推定部13によって、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅が一定時間T0未満であるか否かが判断される。ここでは、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅は、曲率変化速度が基準曲率変化速度VR0であった時刻(第2の時点)と、ウィンカーONが検出された時刻(第1の時点)との時間差として演算される。
【0053】
ステップS9で曲率変化速度が基準曲率変化速度VR0以上となっている時間幅が一定時間T0未満であると判断されると、ステップS10に移行し、車線変更推定部13によって、曲率変化速度が基準曲率変化速度VR0であった時刻が車線変更の開始時点であると推定され、その時刻における自車両曲率が車線変更開始曲率であると推定される。そして、図2に示す処理は終了される。
【0054】
図4は、ステップS7,S9,S10における車線変更開始時点推定の説明図である。図4に示す例では、ウィンカーONが検出された時刻t1において、曲率変化速度は基準曲率変化速度VR0以上となっている。また、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅、すなわち時刻t1と時刻t2との時間差は、一定時間T0未満となっている。よって、ステップS10では、時刻t2における自車両曲率CS2が車線変更開始曲率とされる。このように、ステップS10での推定処理により、車線変更中にウィンカーを立ち上げるような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0055】
また、ステップS9で曲率変化速度が基準曲率変化速度VR0以上となっている時間幅が一定時間T0以上であると判断されると、ステップS11に移行し、車線変更推定部13によって、ウィンカーONが検出された時刻よりも一定時間T0前の時刻(第3の時点)が車線変更の開始時点であると推定され、その時刻における自車両曲率が車線変更開始曲率であると推定される。そして、図2に示す処理は終了される。
【0056】
図5は、ステップS7,S9,S11における車線変更開始時点推定の説明図である。図5に示す例では、ウィンカーONが検出された時刻t1において、曲率変化速度は基準曲率変化速度VR0以上となっている。また、曲率変化速度が基準曲率変化速度VR0以上となっている時間幅、すなわち時刻t1と時刻t2との時間差Taは、一定時間T0以上となっている。よって、ステップS11では、時刻t1よりも一定時間T0前の時刻t3における自車両曲率CS3が車線変更開始曲率とされる。このように、ステップS11での推定処理により、車線変更の開始時点からかけ離れて(大きく遅れて)ウィンカーを立ち上げるような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0057】
次に、ステップS5での車線変更終了時点の推定処理について説明する。図6は、図2中の車線変更終了推定の処理手順を示すフローチャートである。
【0058】
まず、ステップS51において、車線変更推定部13によって、ウィンカーOFFが検出されてから一定時間T1以上経過しているか否かが判断される。ここでは、走行情報取得部11に記憶されているウィンカー情報により、ウィンカーONが検出された後に初めてウィンカーOFFが検出された時刻から現在までの時間差が演算され、この時間差は一定時間T1以上であるか否かにより判断がなされる。
【0059】
ステップS51でウィンカーOFFが検出されてから一定時間T1以上経過していると判断されると、ステップS54に移行し、車線変更推定部13によって車線変更終了時点が推定される。
【0060】
図7は、ステップS51からステップS54へ移行した場合の車線変更終了時点推定の説明図である。図7に示す例では、ウィンカーOFFが検出された時刻t4から一定時間T1以上が経過している。この場合、ステップS54では、ウィンカーOFFが検出されてから一定時間T1後の時刻t5が車線変更の終了時点であると推定される。このような推定処理により、車線変更中にウィンカーを消すような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0061】
ステップS51でウィンカーOFFが検出されてから一定時間T1以上経過していないと判断されると、ステップS52に移行し、車線変更推定部13によって、車線変更は終了したか否かが第1の終了判定により判断される。この第1の終了判定では、ステップS8(又はステップS10,S11)で推定された車線変更開始曲率CS1(又はCS2,CS3)から一定値以上、自車両曲率が左右方向に変化した後、再度、自車両曲率が車線変更開始曲率付近に戻ったか否かにより判断がなされる。
【0062】
ステップS52で第1の終了判定により車線変更は終了したと判断されると、ステップS54に移行し、車線変更推定部13によって車線変更終了時点が推定される。
【0063】
図8は、ステップS52からステップS54へ移行した場合の車線変更終了時点推定の説明図である。図8に示す例では、ステップS8で推定された車線変更開始曲率CS1から一定値R0以上、自車両曲率が左右方向に変化した後、再度、自車両曲率が車線変更開始曲率付近に戻っている。具体的には、時刻t6及び時刻t7において、自車両曲率が車線変更開始曲率CS1から一定値R0以上、右方(正側)及び左方(負側)に変化している。そして、その後時刻t8において、自車両曲率は、車線変更開始曲率CS1との差の絶対値が所定の曲率R1となるまで戻っている。この場合、ステップS54では、時刻t8が車線変更の終了時点であると推定される。このような推定処理により、車線変更が終了してからウィンカーを消すような運転(ドライバ)であっても、精度の良い推定が可能となる。
【0064】
ステップS52で車線変更は終了していないと判定されると、ステップS53に移行し、車線変更推定部13によって、車線変更は終了したか否かが第2の終了判定により判断される。この第2の終了判定では、ステップS8(又はステップS10,S11)で推定された車線変更開始曲率CS1(又はCS2,CS3)から一定値以上、自車両曲率が左右方向に変化した後、自車両曲率が所定範囲内に所定時間収束したか否かにより判断がなされる。
【0065】
ステップS53で第2の終了判定により車線変更は終了したと判断されると、ステップS54に移行し、車線変更推定部13によって車線変更終了時点が推定される。
【0066】
図9は、ステップS53からステップS54へ移行した場合の車線変更終了時点推定の説明図である。図9に示す例では、ステップS8で推定された車線変更開始曲率CS1から一定値R0以上、自車両曲率が左右方向に変化した後、自車両曲率が所定範囲内に所定時間収束している。具体的には、時刻t6及び時刻t7において、自車両曲率が車線変更開始曲率CS1から一定値R0以上、右方(正側)及び左方(負側)に変化している。そして、時刻t9から時刻t10まで所定時間T2が経過する間、自車両曲率は所定範囲R2内に収束している。この場合、ステップS54では、時刻t10が車線変更の終了時点であると推定される。このような推定処理により、車線変更中に実際の道路曲率が変化し、車線変更開始時点と車線変更終了時点とにおける自車両曲率が異なってしまう場合であっても、精度の良い推定が可能となる。
【0067】
次に、ステップS55に移行し、車線変更推定部13によって車線変更中フラグに“0”がセットされ、図6の車線変更終了推定処理は終了される。
【0068】
続いて、運転支援装置1による自車線中心の推定処理について説明する。図10は、自車線中心推定処理の処理手順を示すフローチャートである。図10における処理は、自車線中心推定ECU10によって所定の周期で繰り返し実行される。なお、この自車線中心推定処理は、図2の車線変更推定処理において取得若しくは演算される走行情報、曲率変化速度、車線変更開始時点、車線変更開始曲率等を用いて実行される。
【0069】
まず、ステップS21において、車線変更推定部13によって、車線変更中であるか否かの判断のために、車線変更中フラグに“1”がセットされているか否かが判断される。ここでは、車線変更推定部13のフラグは“0”又は“1”のいずれにセットされているかが判断される。
【0070】
ステップS21で車線変更中フラグに“1”がセットされていると判断されると、ステップS22に移行し、自車両曲率演算部12によって曲率変化量が演算される。ここでは、曲率変化量は、走行情報取得部11に記憶された最新の自車両曲率について演算される。この曲率変化量は、車線変更開始後に、自車両曲率がどの程度変化したかを示す値である。
【0071】
次に、ステップS23に移行し、自車両方向検出部14によって方向変化量が演算される。ここでは、走行情報取得部11に記憶された自車両方向情報に基づいて車線変更開始方向が演算され、走行情報取得部11に記憶された最新の自車両方向について方向変化量が演算される。この方向変化量は、車線変更開始後に、自車両方向がどの程度変化したかを示す値である。
【0072】
次に、ステップS24に移行し、自車両曲率演算部12によって、ウィンカー方向と曲率変化方向とは同じであるか否かが判断される。ここでは、走行情報取得部11に記憶される最新のウィンカー情報と自車両曲率演算部12が記憶する最新の曲率変化速度とに基づいて判断がなされる。例えば、ウィンカー情報に示される方向指示が右ウィンカーONであり、右方への曲率変化(正の曲率変化)が生じている場合、ウィンカー方向と曲率変化方向とは同じであると判断される。また、ウィンカー情報に示される方向指示が左ウィンカーONであり、右方への曲率変化が生じている場合、ウィンカー方向と曲率変化方向とは異なると判断される。
【0073】
ステップS24でウィンカー方向と曲率変化方向とは同じであると判断されると、ステップS25に移行し、道路曲率推定部15によって、ステップS22で演算された曲率変化量は一定値DR0未満であるか否かが判断される。
【0074】
ステップS25で曲率変化量が一定値DR0未満であると判断されると、ステップS26に移行し、道路曲率推定部15によって車線変更開始曲率が道路曲率であると推定される。すなわち、車線変更開始曲率が道路曲率に代入される。このような推定処理により、車線変更中に自車両曲率と道路曲率とが異なる場合であっても、道路曲率を精度良く推定することができる。
【0075】
一方、ステップS25で曲率変化量が一定値DR0以上であると判断されると、ステップS27に移行し、道路曲率推定部15によって、ステップS22で用いられた自車両曲率から一定値DR0を減じた値が道路曲率であると推定される。すなわち、自車両曲率から車線変更時に通常発生する自車両曲率変化量DR0を減じた値が道路曲率に代入される。更に言い換えれば、道路曲率推定部15は、車線変更開始曲率に、曲率変化量が一定値DR0を超えた分((曲率変化量)−(一定値DR0))を加えた値を道路曲率とする。このような推定処理により、車線変更中に道路曲率が変化する場合であっても、その変化分が車線変更開始曲率に加えられるため、道路曲率を精度良く推定することができる。
【0076】
ステップS26又はステップS27に続いて、ステップS28に移行し、道路方向推定部16によって、ステップS23で演算された方向変化量は一定値DY0未満であるか否かが判断される。
【0077】
ステップS28で方向変化量が一定値DY0未満であると判断されると、ステップS29に移行し、道路方向推定部16によって、自車両方向から方向変化量を減じた値が道路方向であると推定される。すなわち、車線変更開始方向が道路方向に代入される。このような推定処理により、車線変更中に自車両方向と道路方向とが異なる場合であっても、道路方向を精度良く推定することができる。
【0078】
一方、ステップS28で方向変化量が一定値DY0以上であると判断されると、ステップS30に移行し、道路方向推定部16によって、ステップS23で用いられた自車両方向から一定値DY0を減じた値が道路方向であると推定される。すなわち、自車両方向から車線変更時に通常発生する自車両方向変化量DY0を減じた値が道路方向に代入される。更に言い換えれば、道路方向推定部16は、車線変更開始方向に、方向変化量が一定値DY0を超えた分((方向変化量)−(一定値DY0))を加えた値を道路方向とする。このような推定処理により、車線変更中に道路方向が変化する場合であっても、その変化分が車線変更開始方向に加えられるため、道路方向を精度良く推定することができる。
【0079】
ステップS29又はステップS30に続いて、ステップS31に移行し、自車線中心推定部17によって自車線中心が推定される。ここでは、道路曲率推定部15によって推定された道路曲率と、道路方向推定部16によって推定された道路方向とに基づいて、自車線中心が推定される。そして、図10の自車線中心推定処理は終了される。
【0080】
図11は、直線路を走行中に車線変更した場合の自車線中心推定の説明図である。図11に示す例では、自車両20は、直線路を走行中に右方(追越車線)へ車線変更している。図11では、左側に車線変更開始時点の自車両20を、右側に車線変更開始中の自車両20を示している(以下の図面においても同様とする)。図11に示すように、直進中の自車両20が車線変更を開始する際、車線変更開始曲率及び車線変更開始方向が、それぞれ道路曲率及び道路方向とされ(S26,S29)、自車線中心L1が推定される(S31)。
【0081】
また、車線変更中においても、走行する道路は直線路であるため、曲率変化量及び方向変化量はそれぞれ一定値DR0,DY0未満となり、車線変更開始曲率及び車線変更開始方向が、それぞれ道路曲率及び道路方向とされる(S26,S29)。そして、自車線中心L4が推定される(S31)。
【0082】
ここで、実際の自車両曲率に基づいて自車線中心を推定した場合、車線変更中の自車両曲率は道路曲率とは異なるため、図11中の自車線中心L2のように、実際の自車線中心からは大きくずれてしまう。また、道路曲率として車線変更開始曲率を用いた場合でも、実際の自車両方向に基づいて自車線中心を推定した場合、車線変更中の自車両方向は道路方向とは異なるため、図11中の自車線中心L3のように、実際の自車線中心からはずれてしまう。
【0083】
運転支援装置1では、曲率変化量及び方向変化量がそれぞれ一定値DR0,DY0未満の場合、道路曲率推定部15及び道路方向推定部16によって、車線変更開始曲率及び車線変更開始方向がそれぞれ道路曲率及び道路方向とされる。このため、自車線中心L2や自車線中心L3のようなずれを補正でき、自車線中心を精度良く推定できる。なお、曲率が略一定なカーブ路を走行中に車線変更する場合であっても、同様の作用効果が得られる。
【0084】
図12は、車線変更中に道路曲率及び道路方向が変化した場合の自車線中心推定の説明図である。図12に示す例では、自車両20は、直線路を走行中に右方(追越車線)へ車線変更を開始し、その後、車線変更中に道路は右方へカーブしている。図12に示す自車線中心L5は、図11に示した場合と同様に推定される。更に、車線変更中に道路がカーブ路となるため、曲率変化量及び方向変化量はいずれも一定値DR0,DY0以上となり、実際の自車両曲率及び自車両方向から一定値DR0,DY0をそれぞれ減じた値が、道路曲率及び道路方向であると推定される(S27,S30)。そして、自車線中心L8が推定される(S31)。
【0085】
ここで、図11に示した方法と同様の手順で自車線中心を推定した場合、車線変更中に道路曲率が変化しているため、図12中の自車線中心L6のように、実際の自車線中心からは大きくずれてしまう。また、道路方向として実際の自車両方向から一定値DY0を減じた値を用いた場合でも、道路曲率として車線変更開始曲率を用いた場合、車線変更中の自車両曲率は車線変更開始曲率から一定値DR0以上変化しているため、図12中の自車線中心L7のように実際の自車線中心からはずれてしまう。
【0086】
運転支援装置1では、曲率変化量及び方向変化量がいずれも一定値DR0,DY0以上の場合、道路曲率推定部15及び道路方向推定部16によって、自車両曲率及び自車両方向から一定値DR0,DY0をそれぞれ減じた値が道路曲率及び道路方向とされる。このため、自車線中心L6や自車線中心L7のようなずれを補正でき、自車線中心を精度良く推定できる。
【0087】
一方、ステップS21で車線変更中フラグに“0”がセットされていると判断されたり、ステップS24でウィンカー方向と曲率変化方向とは異なると判断されると、ステップS32に移行し、道路曲率推定部15によって、走行情報取得部11に記憶された最新の自車両曲率が道路曲率であると推定される。すなわち、その最新の自車両曲率が道路曲率に代入される。このような推定処理により、車線変更中に車線変更方向とは逆方向に実際の道路曲率が変化する場合であっても、道路曲率を精度良く推定することができる。
【0088】
次に、ステップS33に移行し、道路方向推定部16によって、走行情報取得部11に記憶された最新の自車両方向が道路方向であると推定される。すなわち、その最新の自車両方向が道路方向に代入される。このような推定処理により、車線変更中に車線変更方向とは逆方向に実際の道路方向が変化する場合であっても、道路方向を精度良く推定することができる。
【0089】
次に、ステップS31に移行し、自車線中心推定部17によって自車線中心が推定され、図10の自車線中心推定処理は終了される。
【0090】
図13は、車線変更中に、車線変更方向とは逆方向に道路曲率及び道路方向が変化した場合の自車線中心推定の説明図である。図13に示す例では、自車両20は、直線路を走行中に左方(走行車線)へ車線変更を開始し、その後、車線変更中に道路は右方へカーブしている。図13に示す自車線中心L9は、図11に示した場合と同様に推定される。更に、車線変更中に、道路が車線変更方向とは逆方向のカーブ路となるため、ウィンカー方向と曲率変化方向とは異なると判断され(S24)、自車両曲率及び自車両方向がそれぞれ道路曲率及び道路方向であると推定される(S32,S33)。そして、自車線中心L12が推定される(S31)。
【0091】
ここで、図11や図12に示した方法と同様の手順で自車線中心を推定した場合、車線変更中に、車線変更方向とは逆方向に道路曲率及び道路方向が変化しているため、図13中の自車線中心L10のように、実際の自車線中心からは大きくずれてしまう。また、道路方向として実際の自車両方向を用いた場合でも、車線変更開始曲率に基づいて自車線中心を推定した場合、図13中の自車線中心L11のように、実際の自車線中心からはずれてしまう。
【0092】
運転支援装置1では、ウィンカー方向と曲率変化方向とは異なると判断された場合、道路曲率推定部15及び道路方向推定部16によって、自車両曲率及び自車両方向がそれぞれ道路曲率及び道路方向とされる。このため、曲率変化量や方向変化量が少ない場合でも、自車線中心を精度良く推定できる。なお、車線変更中でない場合にも、同様にして、自車両曲率及び自車両方向がそれぞれ道路曲率及び道路方向であると推定されるため、自車線中心を精度良く推定できる。
【0093】
以上の一連の処理によって、運転支援装置1による車線変更推定処理及び自車線中心推定処理が実行される。
【0094】
このように、本実施形態に係る運転支援装置1によれば、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点t1における曲率変化速度が基準曲率変化速度VR0以上である場合、曲率変化速度が基準曲率変化速度VR0であった第2の時点t2を車線変更開始時点と推定する(図4参照)。通常、自車両が車線変更を開始すると、自車両曲率及び曲率変化速度は漸増する。ここで、ウィンカーONが検出された第1の時点t1において曲率変化速度が既に基準曲率変化速度VR0以上となっている場合、ドライバによるウィンカーの操作が車線変更の開始よりも遅かったことが考えられる。
【0095】
この場合、車線変更推定部13は、曲率変化速度が基準曲率変化速度VR0であった第2の時点t2を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報(曲率変化速度)により車線変更の開始時点t2を推定するため、車線変更の開始時点t2を迅速に推定できる。
【0096】
また、第1の時点t1と第2の時点t2との時間差Taが一定時間T0以上である場合、すなわち、ウィンカーONが検出された第1の時点t1よりも、曲率変化速度が基準曲率変化速度VR0であった第2の時点t2が一定時間T0以上前である場合、第2の時点t2では、ドライバは車線変更を開始してから大きく遅れてウィンカーを操作したと考えられる。運転支援装置1によれば、車線変更推定部13は、第1の時点t1よりも一定時間T0前の第3の時点t3を車線変更開始時点と推定するため、そのような例外的な運転がなされた場合であっても車線変更の開始時点を精度良く推定できる(図5参照)。
【0097】
また、通常、車線変更中における自車両曲率は、車線を変更するためのハンドル操作により、道路曲率とは異なっている。一方、車線変更開始時点における自車両曲率は、道路曲率に近似していると考えられる。運転支援装置1によれば、道路曲率推定部15は、車線変更開始時点における自車両曲率に基づいて道路曲率を推定するため、道路曲率を精度良く推定することができる。
【0098】
また、曲率が略一定なカーブ路(直進路を含む)を走行する場合、車線変更開始時点における自車両曲率は、車線変更中の道路曲率に略等しいと考えられる。運転支援装置1によれば、曲率が略一定なカーブ路を走行しながらの車線変更において、道路曲率の推定精度を高めることができる。
【0099】
また、自車線中心を精度良く推定するためには、道路曲率のみならず、道路方向を推定することが望ましい。通常、車線変更中における自車両方向は、車線を変更するためのハンドル操作により、道路方向とは異なっている。一方、車線変更開始時点における自車両方向は、道路方向に近似していると考えられる。運転支援装置1によれば、道路方向推定手段は、車線変更開始時点における自車両方向に基づいて道路方向を推定するため、道路方向を精度良く推定できる。更には、自車線中心L4を精度良く推定できる(図11参照)。
【0100】
また、運転支援装置1によれば、直進路又は方向の変化が少ないカーブ路を走行しながらの車線変更において、道路方向の推定精度を高めることができる。
【0101】
以上、本発明の実施形態について詳述したが、本発明は上記実施形態に限られるものではない。例えば、上記実施形態では、車線変更の推定結果が自車線中心の推定に用いられる場合について説明したが、隣接する車線を走行する他車両との衝突防止のための運転支援等、他の運転支援に用いられてもよい。
【符号の説明】
【0102】
1…運転支援装置、3…ウィンカーセンサ(方向指示検出手段)、12…自車両曲率演算部(自車両曲率演算手段)、13…車線変更推定部(車線変更推定部手段)、14…自車両方向検出部(自車両方向検出手段)15…道路曲率推定部(道路曲率推定手段)、16…道路方向推定部(道路方向推定手段)、20…自車両、T0…一定時間、t1…時刻(第1の時点)、t2…時刻(第2の時点)、t3…時刻(第3の時点)、Ta…時間差、VR0…基準曲率変化速度(所定値)。
【特許請求の範囲】
【請求項1】
方向指示器による方向指示を検出する方向指示検出手段と、
自車両の走行軌跡の曲率である自車両曲率を演算し、前記自車両曲率の曲率変化速度を演算する自車両曲率演算手段と、
前記方向指示検出手段により検出された前記方向指示と前記自車両曲率演算手段により演算された前記曲率変化速度とに基づいて前記自車両の車線変更開始時点を推定する車線変更推定手段と、を備え、
前記車線変更推定手段は、前記方向指示検出手段によって所定の方向指示が検出された第1の時点における前記曲率変化速度が所定値以上である場合に、前記曲率変化速度が当該所定値であった第2の時点を前記車線変更開始時点と推定することを特徴とする運転支援装置。
【請求項2】
前記車線変更推定手段は、前記第1の時点と前記第2の時点との時間差が一定時間以上である場合には、前記第1の時点よりも当該一定時間前の第3の時点を前記車線変更開始時点と推定する請求項1記載の運転支援装置。
【請求項3】
前記車線変更推定手段により推定された前記車線変更開始時点における前記自車両曲率に基づいて、前記自車両が車線変更中に走行する道路の曲率である道路曲率を推定する道路曲率推定手段を備える請求項1又は2記載の運転支援装置。
【請求項4】
前記道路曲率推定手段は、前記車線変更開始時点における前記自車両曲率を前記道路曲率とする請求項3記載の運転支援装置。
【請求項5】
前記自車両の方向である自車両方向を検出する自車両方向検出手段と、
前記車線変更推定手段により推定された前記車線変更開始時点における前記自車両方向に基づいて、前記自車両が車線変更中に走行する道路の方向である道路方向を推定する道路方向推定手段と、を備える請求項1〜4のいずれか一項記載の運転支援装置。
【請求項6】
前記道路方向推定手段は、前記車線変更開始時点における前記自車両方向を前記道路方向とする請求項5記載の運転支援装置。
【請求項1】
方向指示器による方向指示を検出する方向指示検出手段と、
自車両の走行軌跡の曲率である自車両曲率を演算し、前記自車両曲率の曲率変化速度を演算する自車両曲率演算手段と、
前記方向指示検出手段により検出された前記方向指示と前記自車両曲率演算手段により演算された前記曲率変化速度とに基づいて前記自車両の車線変更開始時点を推定する車線変更推定手段と、を備え、
前記車線変更推定手段は、前記方向指示検出手段によって所定の方向指示が検出された第1の時点における前記曲率変化速度が所定値以上である場合に、前記曲率変化速度が当該所定値であった第2の時点を前記車線変更開始時点と推定することを特徴とする運転支援装置。
【請求項2】
前記車線変更推定手段は、前記第1の時点と前記第2の時点との時間差が一定時間以上である場合には、前記第1の時点よりも当該一定時間前の第3の時点を前記車線変更開始時点と推定する請求項1記載の運転支援装置。
【請求項3】
前記車線変更推定手段により推定された前記車線変更開始時点における前記自車両曲率に基づいて、前記自車両が車線変更中に走行する道路の曲率である道路曲率を推定する道路曲率推定手段を備える請求項1又は2記載の運転支援装置。
【請求項4】
前記道路曲率推定手段は、前記車線変更開始時点における前記自車両曲率を前記道路曲率とする請求項3記載の運転支援装置。
【請求項5】
前記自車両の方向である自車両方向を検出する自車両方向検出手段と、
前記車線変更推定手段により推定された前記車線変更開始時点における前記自車両方向に基づいて、前記自車両が車線変更中に走行する道路の方向である道路方向を推定する道路方向推定手段と、を備える請求項1〜4のいずれか一項記載の運転支援装置。
【請求項6】
前記道路方向推定手段は、前記車線変更開始時点における前記自車両方向を前記道路方向とする請求項5記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−118819(P2011−118819A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−277644(P2009−277644)
【出願日】平成21年12月7日(2009.12.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月7日(2009.12.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]