
運転支援装置
【課題】自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援装置に関する。
【背景技術】
【0002】
車両の運転者を支援するために様々な装置が開発されており、例えば、衝突防止装置がある。衝突防止装置では、自車両と自車両周辺の障害物との衝突の危険度を判断するために、障害物の将来の位置を予測することが重要となる。この予測方法としては、例えば、障害物の現在の位置情報や速度情報から障害物の将来的な位置の存在確率を算出する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−292538号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
道路には道路標識や道路標示などで示される交通規則があり、道路上を移動する車両などは交通規則に従って移動している。したがって、進入禁止などの交通規則によって、障害物が移動できない領域(道路)もある。しかし、上記の予測方法では障害物の現在の位置情報や速度情報から障害物の存在確率を予測しているので、障害物が移動できない領域に対しても存在確率を算出することがある。そのため、衝突の危険度の判断やその危険度に基づく運転支援を適切に行えない。
【0005】
そこで、本発明は、自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置であって、移動体の現在の移動状態を取得する移動状態取得手段と、移動状態取得手段で取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段と、移動体周辺の交通規則情報を取得する交通規則情報取得手段を備え、移動状態予測手段は、交通規則情報取得手段で取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
【0007】
この運転支援装置では、移動状態取得手段によって自車両周辺の移動体の現在の移動状態(現在の位置、速度、加速度など)を取得する。また、運転支援装置では、交通規則情報取得手段によって移動体周辺の交通規則情報を取得する。そして、運転支援装置では、移動状態予測手段によって移動体の現在の移動状態に加えて交通規則情報に基づいて移動体の将来の移動状態(将来の位置、将来の各位置での存在確率など)を予測し、その移動体の将来の移動状態に基づいて運転支援を行う。このように、運転支援装置では、自車両周辺の移動体の将来の移動状態を交通規則情報を考慮して予測することにより、移動体が将来存在し得ない領域に対する予測などがなくなり、移動体の将来の移動状態を高精度に予測することができる。その移動体の将来の移動状態を用いて運転支援を行うことにより、適切な運転支援を行うことができる。
【0008】
なお、移動体は、道路上を移動する物体であり、例えば、四輪自動車、自動二輪車、自転車、歩行者である。交通規則情報は、道路上の交通に関する各種規則(交通法規、交通ルールなど)であり、例えば、道路標識で示される交通規則、道路標示で示される交通規則、信号機である。
【0009】
本発明の上記運転支援装置では、移動状態予測手段は、交通規則情報取得手段で取得した交通規則情報に基づいて移動体が移動できない領域と認識した場合、当該認識した領域において移動体の将来の移動状態を予測しないと好適である。
【0010】
交通規則には、進入禁止や通行止めなどのように移動体が進入できない領域や専用通行帯や歩行者専用などのように一部の移動体しか移動できない領域を規定したものがある。そこで、運転支援装置では、移動状態予測手段によって交通規則情報から移動体が移動できない領域があると認識した場合、その移動体が移動できない領域を除外して移動体の将来の移動状態を予測する。このように、運転支援装置では、交通規則情報から移動体が将来移動可能な領域を絞ることにより、移動体の将来の移動状態を高精度に予測することができる。
【発明の効果】
【0011】
本発明によれば、自車両周辺の移動体の将来の移動状態を交通規則情報を考慮して予測することにより、移動体の将来の移動状態を高精度に予測することができる。
【図面の簡単な説明】
【0012】
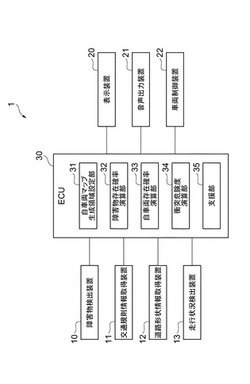
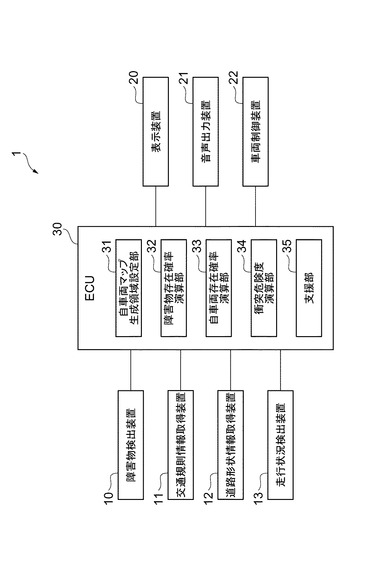
【図1】本実施の形態に係る運転支援装置の構成図である。
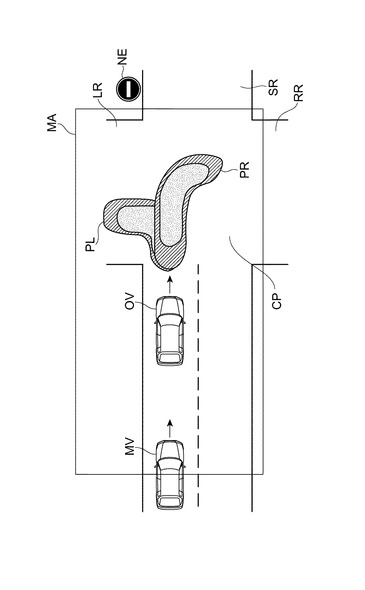
【図2】自車両前方の先行車両のt秒後の存在確率分布の一例である。
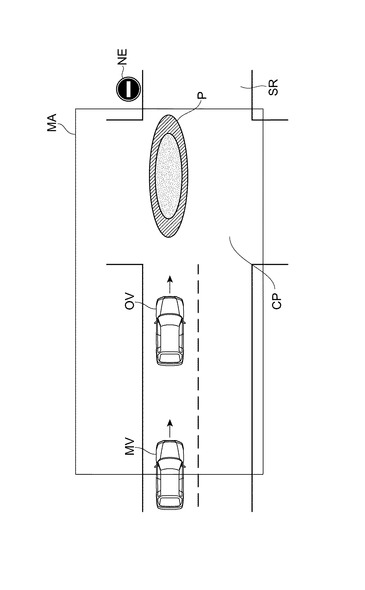
【図3】従来の予測方法による自車両前方の先行車両のt秒後の存在確率分布の一例である。
【図4】図1のECUにおける処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0014】
本実施の形態では、本発明を、車両に搭載される運転支援装置に適用する。本実施の形態に係る運転支援装置は、自車両周辺の障害物との衝突を防止するための運転支援装置であり、自車両と障害物との衝突の危険度が高い場合には運転者に対する表示や音声出力(警報)、車両に対するブレーキ制御や操舵制御を行う。
【0015】
図1、図2を参照して、本実施の形態に係る運転支援装置1について説明する。図1は、本実施の形態に係る運転支援装置の構成図である。図2は、自車両前方の先行車両のt秒後の存在確率分布の一例である。
【0016】
運転支援装置1は、障害物のt秒後の存在確率と自車両のt秒後の存在確率を演算し、その障害物の存在確率と自車両の存在確率から自車両に対する衝突の危険度を演算する。特に、運転支援装置1は、障害物のt秒後の存在確率の精度を向上させるために、障害物周辺の交通規則情報を考慮して存在確率を演算する。
【0017】
運転支援装置1は、障害物検出装置10、交通規則情報取得装置11、道路形状情報取得装置12、走行状況検出装置13、表示装置20、音声出力装置21、車両制御装置22及びECU[Electronic Control Unit]30を備えている。なお、本実施の形態では、障害物検出装置10が特許請求の範囲に記載する移動状態取得手段に相当し、交通規則情報取得装置11が特許請求の範囲に記載する交通規則情報取得手段に相当する。
【0018】
障害物検出装置10は、自車両周辺の障害物を検出し、障害物に関する情報を取得する装置である。障害物は、自車両の走行に障害となる可能性がある道路上を移動する物体であり、例えば、他車両(四輪自動車、自動二輪車)、自転車、歩行者である。障害物の情報としては、位置、速度、加速度などであり、これらの情報は自車両に対する相対的な値でもよい。障害物検出装置10としては、例えば、ミリ波レーダ、レーザレーダ、カメラとその撮像画像に対する画像認識装置、他車両から車車間通信で情報を取得する車車間通信装置がある。障害物検出装置10では、障害物を検出し、障害物を検出できた場合にはその障害物の情報を取得し、その取得した情報を障害物情報信号としてECU30に送信する。
【0019】
交通規則情報取得装置11は、自車両周辺(ひいては、障害物周辺)の交通規則情報を取得する装置である。交通規則は、道路上の交通に関する各種規則(交通法規、交通ルールなど)であり、例えば、道路標識で示される交通規則、道路標示で示される交通規則、信号機がある。特に、障害物の走行に影響を与える交通規則が対象であり、走行する領域、走行する方向、走行する速度などを制限する規則である。道路標識としては、例えば、進入禁止、通行止め、車両通行止め、一方通行、歩行者専用、一時停止、徐行、専用通行帯、追い越し禁止などがある。道路標示としては、はみ出し禁止の黄色線、立ち入り禁止、停止線、専用通行帯などがある。交通規則情報取得装置11としては、例えば、カメラとその撮像画像に対する画像認識装置、ナビゲーションシステムが搭載されている場合には交通規則情報も格納した地図データベース、路車間通信で交通規則情報を含むインフラ情報を取得する路車間通信装置がある。交通規則情報取得装置11では、交通規則に関する情報を取得し、その取得した情報を交通規則情報信号としてECU30に送信する。
【0020】
道路形状情報取得装置12は、自車両周辺の道路形状情報を取得する装置である。道路形状情報としては、例えば、道路線形情報、道路幅、車線数、交差点情報、カーブ半径がある。道路形状情報取得装置12としては、例えば、上記で列挙した交通規則情報取得装置11と同様の装置がある。道路形状情報取得装置12では、道路形状に関する情報を取得し、その取得した情報を道路形状情報信号としてECU30に送信する。
【0021】
走行状況検出装置13は、自車両の走行状況を検出する装置である。走行状況としては、例えば、位置、速度、加速度(前後方向、横方向)、ヨーレート、走行方向がある。走行状況検出装置13としては、例えば、車輪速センサ、ヨーレートセンサ、舵角センサ、ナビゲーションシステム、ナビゲーションシステムが搭載されていない場合にはGPS受信装置とその受信したGPS信号を利用して現在位置や走行方向を演算する演算装置がある。走行状況検出装置13では、自車両の走行状況を検出し、その検出した走行状況に関する情報を走行状況情報信号としてECU30に送信する。
【0022】
表示装置20は、運転者に対するメッセージや警告などを表示する装置である。表示装置20としては、例えば、ナビゲーションシステムなどで利用される車載の液晶ディスプレイ、メータ内の表示部、ヘッドアップディスプレイがある。表示装置20では、ECU30から表示制御信号を受信すると、表示制御信号に基づいて画像を表示する。
【0023】
音声出力装置21は、運転者に対するメッセージや警報などを出力する装置である。音声出力装置21としては、例えば、車載のスピーカとそのアンプ、警報装置がある。音声出力装置21では、ECU30から音声制御信号を受信すると、音声制御信号に基づいて音声を出力する。
【0024】
車両制御装置22は、衝突を回避するために自車両に対して自動ブレーキや自動操舵を行うための制御装置である。車両制御装置22としては、例えば、ホイールシリンダの油圧を調整するブレーキアクチュエータとその制御装置、電動パワーステアリングシステムがある。車両制御装置22では、ECU30から車両制御信号を受信すると、車両制御信号に示される目標制御値(目標油圧、目標舵角など)になるように車両の各部を制御する。
【0025】
ECU30は、CPU[CentralProcessing Unit]や各種メモリなどからなる電子制御ユニットであり、運転支援装置1を統括制御する。ECU30は、各種アプリケーションプログラムをCPUで実行することによって自車両マップ生成領域設定部31、障害物存在確率演算部32、自車両存在確率演算部33、衝突危険度演算部34、支援部35を構成する。なお、本実施の形態では、障害物存在確率演算部32が特許請求の範囲に記載する移動状態予測手段に相当する。
【0026】
ECU30では、障害物検出装置10、交通規則情報取得装置11、道路形状情報取得装置12、走行状況検出装置13から各信号を受信し、各信号から障害物情報、交通規則情報、道路形状情報、走行状況情報を取得する。そして、ECU30では、これらの各情報を用いて各部31,32,33,34,35での処理を行い、必要に応じて表示装置20、音声出力装置21、車両制御装置22に各制御信号を送信する。
【0027】
自車両マップ生成領域設定部31では、自車両の現在の位置情報と動き情報(速度、加速度など)に基づいて、自車両マップ生成領域を設定する。自車両マップ生成領域は、自車両の現在位置から進行方向側にt秒後に移動することが可能な最大範囲に応じた領域であり、領域内がグリッド状に区画される。この自車両マップ生成領域のグリッド状に区画された各エリア(各位置)に、障害物と自車両の各存在確率及び衝突の危険度がそれぞれ設定される。t秒は、実験などで予め設定された固定値でもよいし、速度や加速度に応じた可変値でもよい。図2に示す例では、自車両MVから前方の交差点CPを含む範囲までが自車両マップ生成領域MAとして設定されている。
【0028】
障害物存在確率演算部32では、検出された障害物毎に、周辺の道路形状情報、障害物の現在の位置情報と動き情報及び周辺の交通規則情報に基づいて、障害物のt秒後の存在確率を演算する。
【0029】
この演算方法としては、まず、障害物の現在位置を基準として速度や加速度に基づいてt秒後に存在する位置についての正規分布の平均と分散を演算し、その平均と分散から正規分布の確率分布を演算し、その正規分布の確率分布からt秒後の障害物の存在確率分布を演算する。この存在確率分布は、t秒後に障害物が存在する各確率を同心の楕円状又は円状の各領域で表したものであり、確率が大きくなるほど領域が大きくなる。また、この存在確率分布は、基準となる分布であり、障害物が現在走行中の道路に沿って将来も走行した場合のマップである。ここまでの演算は、従来と同様の方法であり、従来の他の方法で演算してもよい。
【0030】
さらに、交通規則情報を利用し、その存在確率分布が配置される方向や位置あるいは存在確率分布の形状や大きさを変更し、その変更した存在確率分布に基づいて自車両マップ生成領域MAのグリッド状に区画された各エリア(各位置)に存在確率を設定する。以下に、交通規則情報を利用した存在確率の変更方法の具体的な例を示す。
【0031】
図2に示す例では、交差点CPの直進先の道路SRが道路標識で進入禁止NEとなっているので、自車両MVの障害物である先行車両OVは右折先の道路RRと左折先の道路LRへの進入が可能である。そこで、存在確率分布の方向を交差点CPを右折する方向と左折する方向に曲げ、右折の場合の存在確率分布PRと左折の場合の存在確率分布PLとする。ちなみに、図3には、従来の方法による存在確率分布を示しており、従来の方法では道路標識の進入禁止NEを考慮していないので、交差点CPの直進先の道路SRの方向に延びる存在確率分布P(現在の位置情報と動き情報に基づく基準となる存在確率分布に相当)となる。
【0032】
進入禁止以外の交通規則情報を利用した存在確率分布の変更方法の具体的な例を他にも説明する。通行止め、車両通行止めの場合、通行止めの対象となる障害物はその道路に進入できないので、その道路以外の進入可能な道路の方向に存在確率分布を変更する。一方通行の場合、障害物はその一方通行の方向にしか進めないので、その一方通行の方向に存在確率分布を変更する。歩行者専用の場合、歩行者以外の障害物はその道路に進入できないので、その道路以外の進入可能な道路の方向に存在確率分布を変更する。
【0033】
一時停止の場合(信号機が赤信号の場合も同様)、障害物はその一時停止の位置で停止しなければならないので、一時停止線の手前となるように存在確率分布の位置及び大きさを変更する。徐行の場合、障害物は速度を低下させて走行しなければならないので、存在確率分布の位置及び大きさを変更する。これらの場合、基準となる存在確率分布を演算する際の速度や加速度を変更して、一時停止や徐行に対応する存在確率分布を演算するようにするとよい。
【0034】
専用通行帯の場合、障害物に対して車線変更をする経路を考えなくてよいので、現在走行している車線内になるように存在確率分布の形状を変更する。追い越し禁止の場合(道路標示のはみ出し禁止の黄色線も同様)、障害物に対して追い越す経路を考えなくてよいので、現在走行している車線内になるように存在確率分布の形状を変更する。道路標示で立ち入り禁止がある場合、障害物がそのエリアに進入できないので、そのエリアを除外したエリアに分布するように存在確率分布の形状を変更する。
【0035】
自車両存在確率演算部33では、周辺の道路形状情報、自車両の現在の位置情報と動き情報及び走行予定経路に基づいて、自車両のt秒後の存在確率を演算する。この演算方法としては、障害物存在確率演算部32で説明した同様の方法によって、自車両の現在の位置情報と動き情報に基づいて自車両のt秒後の存在確率分布を演算する。そして、自車両の走行予定経路に沿って存在確率分布が配置される方向を設定し、その存在確率分布に基づいて自車両マップ生成領域MAのグリッド状に区画された各エリア(各位置)に存在確率を設定する。走行予定経路がない場合、障害物存在確率演算部32で説明した同様の方法により、交通規則情報を利用して存在確率分布を変更してもよい。
【0036】
衝突危険度演算部34では、検出された障害物毎に、自車両マップ生成領域MAのグリッド状に区画された各エリアにおける障害物の存在確率と自車両の存在確率をそれぞれ乗算し、その各乗算値を各エリアにおける衝突の危険度とする。存在確率を用いた衝突の危険度の演算方法は、この方法以外の他の方法でもよい。
【0037】
支援部35では、検出された障害物毎に、各エリアにおける衝突の危険度が高いと判定した場合、衝突の危険度が高いことや衝突の回避操作が必要なことなどを運転者に知らせる表示用及び音声出力用のメッセージや警告を生成し、そのメッセージや警告を表示するための表示制御信号を表示装置20に送信するとともに音声出力するための音声制御信号を音声出力装置21に送信する。さらに、支援部35では、衝突の危険度が低下しないあるいは更に危険度が高くなったと判定した場合、衝突を回避するための自動ブレーキを作動させるための目標油圧及び/又は自動操舵を行うための目標舵角を演算し、その目標油圧や目標舵角を示す車両制御信号を車両制御装置22に送信する。
【0038】
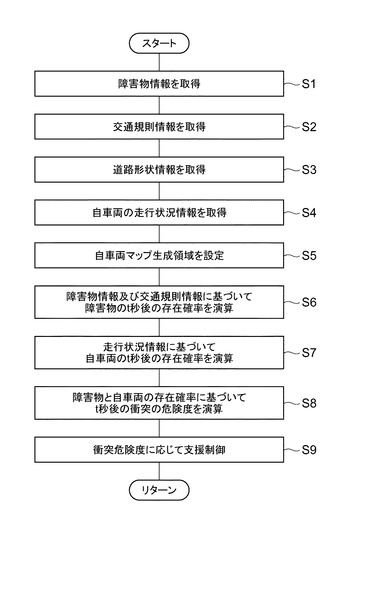
図1を参照して、運転支援装置1の動作について説明する。特に、ECU30における処理については図4のフローチャートに沿って説明する。図4は、図1のECUにおける処理の流れを示すフローチャートである。ECU30では、以下の処理を一定時間毎に繰り返し実行する。
【0039】
障害物検出装置10では、一定時間毎に、自車両周辺の障害物を検出し、障害物を検出できた場合にはその障害物の情報を取得し、障害物情報信号をECU30に送信する。ECU30では、この障害物情報信号を受信し、障害物の情報を取得する(S1)。
【0040】
交通規則情報取得装置11では、一定時間毎に、自車両周辺の交通規則に関する情報を取得し、交通規則情報信号をECU30に送信する。ECU30では、この交通規則情報信号を受信し、自車両周辺(ひいては、障害物周辺)の交通規則情報を取得する(S2)。
【0041】
道路形状情報取得装置12では、一定時間毎に、自車両周辺の道路形状に関する情報を取得し、道路形状情報信号をECU30に送信する。ECU30では、この道路形状情報信号を受信し、自車両周辺の道路形状情報を取得する(S3)。
【0042】
走行状況検出装置13では、一定時間毎に、自車両の走行状況の情報を検出し、走行状況情報信号をECU30に送信する。ECU30では、この走行状況情報信号を受信し、自車両の走行状況の情報を取得する(S4)。
【0043】
ECU30では、自車両の走行状況の情報に基づいて、自車両マップ生成領域を設定する(S5)。EUC30における以下の処理は、障害物毎に行われ、障害物が存在しない場合には行われない。
【0044】
ECU30では、周辺の道路形状情報、障害物の情報及び周辺の交通規則情報に基づいて、自車両マップ生成領域内における障害物のt秒後の存在確率を演算する(S6)。また、ECU30では、周辺の道路形状情報及び自車両の走行状況の情報に基づいて、自車両マップ生成領域内における自車両のt秒後の存在確率を演算する(S7)。そして、ECU30では、その障害物の存在確率と自車両の存在確率に基づいて、t秒後の自車両に対する衝突の危険度を演算する(S8)。
【0045】
ECU30では、衝突の危険度が高いと判定した場合、運転者に対する表示用及び音声出力用のメッセージあるいは警告を生成し、表示制御信号を表示装置20に送信するとともに音声制御信号を音声出力装置21に送信する(S9)。表示装置20では、この表示制御信号を受信すると、表示制御信号に基づいてメッセージあるいは警告を表示する。また、音声出力装置21では、この音声制御信号を受信すると、音声制御信号に基づいてメッセージあるいは警報を出力する。これらの表示や音声(警報)出力を行っても、衝突の危険度が低下しないあるいは更に高くなったと判定した場合、ECU30では、衝突を回避するための目標制御値を演算し、その目標制御値を示す車両制御信号を車両制御装置22に送信する(S9)。車両制御装置22では、この車両制御信号を受信すると、目標制御値に応じて衝突を回避するためのブレーキ制御及び/又は操舵制御を行い、自動ブレーキ及び/又は自動操舵を行う。一方、衝突の危険度が低いと判定した場合、ECU30では、各制御信号を送信することなく、今回の処理を終了する。
【0046】
この運転支援装置1によれば、障害物のt秒後の存在確率を交通規則情報を考慮して予測することにより、障害物がt秒後に存在し得ない領域に対する予測などがなくなり、障害物のt秒後の存在確率を高精度に予測することができる。その障害物のt秒の存在確率を用いて衝突の危険度を求め、その衝突の危険度を用いて衝突防止支援を行うことにより、適切な支援を行うことができる。
【0047】
特に、運転支援装置1では、交通規則情報によって障害物が将来移動可能な領域(移動可能な方向、道路内での移動可能な範囲など)を絞ることにより、障害物のt秒後の存在確率を高精度に予測することができる。
【0048】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0049】
例えば、本実施の形態では障害物の将来の存在確率を予測し、その存在確率から衝突の危険度を演算し、衝突を防止する運転支援装置に適用したが、衝突防止以外の他の運転支援に適用してもよい。また、本実施の形態では衝突の危険度が高い場合には表示、音声出力、車両制御を行う構成としたが、これらのうちのどれか1つ又は2つだけを行ってもよいし、あるいは、他の手段で支援を行ってもよい。
【0050】
また、本実施の形態では障害物の将来の移動状態をt秒後の存在確率で表したが、障害物の将来の移動状態を表すものとしては他のパラメータを用いてもよい。
【符号の説明】
【0051】
1…運転支援装置、10…障害物検出装置、11…交通規則情報取得装置、12…道路形状情報取得装置、13…走行状況検出装置、20…表示装置、21…音声出力装置、22…車両制御装置、30…ECU、31…自車両マップ生成領域設定部、32…障害物存在確率演算部、33…自車両存在確率演算部、34…衝突危険度演算部、35…支援部。
【技術分野】
【0001】
本発明は、運転支援装置に関する。
【背景技術】
【0002】
車両の運転者を支援するために様々な装置が開発されており、例えば、衝突防止装置がある。衝突防止装置では、自車両と自車両周辺の障害物との衝突の危険度を判断するために、障害物の将来の位置を予測することが重要となる。この予測方法としては、例えば、障害物の現在の位置情報や速度情報から障害物の将来的な位置の存在確率を算出する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−292538号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
道路には道路標識や道路標示などで示される交通規則があり、道路上を移動する車両などは交通規則に従って移動している。したがって、進入禁止などの交通規則によって、障害物が移動できない領域(道路)もある。しかし、上記の予測方法では障害物の現在の位置情報や速度情報から障害物の存在確率を予測しているので、障害物が移動できない領域に対しても存在確率を算出することがある。そのため、衝突の危険度の判断やその危険度に基づく運転支援を適切に行えない。
【0005】
そこで、本発明は、自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置であって、移動体の現在の移動状態を取得する移動状態取得手段と、移動状態取得手段で取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段と、移動体周辺の交通規則情報を取得する交通規則情報取得手段を備え、移動状態予測手段は、交通規則情報取得手段で取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
【0007】
この運転支援装置では、移動状態取得手段によって自車両周辺の移動体の現在の移動状態(現在の位置、速度、加速度など)を取得する。また、運転支援装置では、交通規則情報取得手段によって移動体周辺の交通規則情報を取得する。そして、運転支援装置では、移動状態予測手段によって移動体の現在の移動状態に加えて交通規則情報に基づいて移動体の将来の移動状態(将来の位置、将来の各位置での存在確率など)を予測し、その移動体の将来の移動状態に基づいて運転支援を行う。このように、運転支援装置では、自車両周辺の移動体の将来の移動状態を交通規則情報を考慮して予測することにより、移動体が将来存在し得ない領域に対する予測などがなくなり、移動体の将来の移動状態を高精度に予測することができる。その移動体の将来の移動状態を用いて運転支援を行うことにより、適切な運転支援を行うことができる。
【0008】
なお、移動体は、道路上を移動する物体であり、例えば、四輪自動車、自動二輪車、自転車、歩行者である。交通規則情報は、道路上の交通に関する各種規則(交通法規、交通ルールなど)であり、例えば、道路標識で示される交通規則、道路標示で示される交通規則、信号機である。
【0009】
本発明の上記運転支援装置では、移動状態予測手段は、交通規則情報取得手段で取得した交通規則情報に基づいて移動体が移動できない領域と認識した場合、当該認識した領域において移動体の将来の移動状態を予測しないと好適である。
【0010】
交通規則には、進入禁止や通行止めなどのように移動体が進入できない領域や専用通行帯や歩行者専用などのように一部の移動体しか移動できない領域を規定したものがある。そこで、運転支援装置では、移動状態予測手段によって交通規則情報から移動体が移動できない領域があると認識した場合、その移動体が移動できない領域を除外して移動体の将来の移動状態を予測する。このように、運転支援装置では、交通規則情報から移動体が将来移動可能な領域を絞ることにより、移動体の将来の移動状態を高精度に予測することができる。
【発明の効果】
【0011】
本発明によれば、自車両周辺の移動体の将来の移動状態を交通規則情報を考慮して予測することにより、移動体の将来の移動状態を高精度に予測することができる。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る運転支援装置の構成図である。
【図2】自車両前方の先行車両のt秒後の存在確率分布の一例である。
【図3】従来の予測方法による自車両前方の先行車両のt秒後の存在確率分布の一例である。
【図4】図1のECUにおける処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0014】
本実施の形態では、本発明を、車両に搭載される運転支援装置に適用する。本実施の形態に係る運転支援装置は、自車両周辺の障害物との衝突を防止するための運転支援装置であり、自車両と障害物との衝突の危険度が高い場合には運転者に対する表示や音声出力(警報)、車両に対するブレーキ制御や操舵制御を行う。
【0015】
図1、図2を参照して、本実施の形態に係る運転支援装置1について説明する。図1は、本実施の形態に係る運転支援装置の構成図である。図2は、自車両前方の先行車両のt秒後の存在確率分布の一例である。
【0016】
運転支援装置1は、障害物のt秒後の存在確率と自車両のt秒後の存在確率を演算し、その障害物の存在確率と自車両の存在確率から自車両に対する衝突の危険度を演算する。特に、運転支援装置1は、障害物のt秒後の存在確率の精度を向上させるために、障害物周辺の交通規則情報を考慮して存在確率を演算する。
【0017】
運転支援装置1は、障害物検出装置10、交通規則情報取得装置11、道路形状情報取得装置12、走行状況検出装置13、表示装置20、音声出力装置21、車両制御装置22及びECU[Electronic Control Unit]30を備えている。なお、本実施の形態では、障害物検出装置10が特許請求の範囲に記載する移動状態取得手段に相当し、交通規則情報取得装置11が特許請求の範囲に記載する交通規則情報取得手段に相当する。
【0018】
障害物検出装置10は、自車両周辺の障害物を検出し、障害物に関する情報を取得する装置である。障害物は、自車両の走行に障害となる可能性がある道路上を移動する物体であり、例えば、他車両(四輪自動車、自動二輪車)、自転車、歩行者である。障害物の情報としては、位置、速度、加速度などであり、これらの情報は自車両に対する相対的な値でもよい。障害物検出装置10としては、例えば、ミリ波レーダ、レーザレーダ、カメラとその撮像画像に対する画像認識装置、他車両から車車間通信で情報を取得する車車間通信装置がある。障害物検出装置10では、障害物を検出し、障害物を検出できた場合にはその障害物の情報を取得し、その取得した情報を障害物情報信号としてECU30に送信する。
【0019】
交通規則情報取得装置11は、自車両周辺(ひいては、障害物周辺)の交通規則情報を取得する装置である。交通規則は、道路上の交通に関する各種規則(交通法規、交通ルールなど)であり、例えば、道路標識で示される交通規則、道路標示で示される交通規則、信号機がある。特に、障害物の走行に影響を与える交通規則が対象であり、走行する領域、走行する方向、走行する速度などを制限する規則である。道路標識としては、例えば、進入禁止、通行止め、車両通行止め、一方通行、歩行者専用、一時停止、徐行、専用通行帯、追い越し禁止などがある。道路標示としては、はみ出し禁止の黄色線、立ち入り禁止、停止線、専用通行帯などがある。交通規則情報取得装置11としては、例えば、カメラとその撮像画像に対する画像認識装置、ナビゲーションシステムが搭載されている場合には交通規則情報も格納した地図データベース、路車間通信で交通規則情報を含むインフラ情報を取得する路車間通信装置がある。交通規則情報取得装置11では、交通規則に関する情報を取得し、その取得した情報を交通規則情報信号としてECU30に送信する。
【0020】
道路形状情報取得装置12は、自車両周辺の道路形状情報を取得する装置である。道路形状情報としては、例えば、道路線形情報、道路幅、車線数、交差点情報、カーブ半径がある。道路形状情報取得装置12としては、例えば、上記で列挙した交通規則情報取得装置11と同様の装置がある。道路形状情報取得装置12では、道路形状に関する情報を取得し、その取得した情報を道路形状情報信号としてECU30に送信する。
【0021】
走行状況検出装置13は、自車両の走行状況を検出する装置である。走行状況としては、例えば、位置、速度、加速度(前後方向、横方向)、ヨーレート、走行方向がある。走行状況検出装置13としては、例えば、車輪速センサ、ヨーレートセンサ、舵角センサ、ナビゲーションシステム、ナビゲーションシステムが搭載されていない場合にはGPS受信装置とその受信したGPS信号を利用して現在位置や走行方向を演算する演算装置がある。走行状況検出装置13では、自車両の走行状況を検出し、その検出した走行状況に関する情報を走行状況情報信号としてECU30に送信する。
【0022】
表示装置20は、運転者に対するメッセージや警告などを表示する装置である。表示装置20としては、例えば、ナビゲーションシステムなどで利用される車載の液晶ディスプレイ、メータ内の表示部、ヘッドアップディスプレイがある。表示装置20では、ECU30から表示制御信号を受信すると、表示制御信号に基づいて画像を表示する。
【0023】
音声出力装置21は、運転者に対するメッセージや警報などを出力する装置である。音声出力装置21としては、例えば、車載のスピーカとそのアンプ、警報装置がある。音声出力装置21では、ECU30から音声制御信号を受信すると、音声制御信号に基づいて音声を出力する。
【0024】
車両制御装置22は、衝突を回避するために自車両に対して自動ブレーキや自動操舵を行うための制御装置である。車両制御装置22としては、例えば、ホイールシリンダの油圧を調整するブレーキアクチュエータとその制御装置、電動パワーステアリングシステムがある。車両制御装置22では、ECU30から車両制御信号を受信すると、車両制御信号に示される目標制御値(目標油圧、目標舵角など)になるように車両の各部を制御する。
【0025】
ECU30は、CPU[CentralProcessing Unit]や各種メモリなどからなる電子制御ユニットであり、運転支援装置1を統括制御する。ECU30は、各種アプリケーションプログラムをCPUで実行することによって自車両マップ生成領域設定部31、障害物存在確率演算部32、自車両存在確率演算部33、衝突危険度演算部34、支援部35を構成する。なお、本実施の形態では、障害物存在確率演算部32が特許請求の範囲に記載する移動状態予測手段に相当する。
【0026】
ECU30では、障害物検出装置10、交通規則情報取得装置11、道路形状情報取得装置12、走行状況検出装置13から各信号を受信し、各信号から障害物情報、交通規則情報、道路形状情報、走行状況情報を取得する。そして、ECU30では、これらの各情報を用いて各部31,32,33,34,35での処理を行い、必要に応じて表示装置20、音声出力装置21、車両制御装置22に各制御信号を送信する。
【0027】
自車両マップ生成領域設定部31では、自車両の現在の位置情報と動き情報(速度、加速度など)に基づいて、自車両マップ生成領域を設定する。自車両マップ生成領域は、自車両の現在位置から進行方向側にt秒後に移動することが可能な最大範囲に応じた領域であり、領域内がグリッド状に区画される。この自車両マップ生成領域のグリッド状に区画された各エリア(各位置)に、障害物と自車両の各存在確率及び衝突の危険度がそれぞれ設定される。t秒は、実験などで予め設定された固定値でもよいし、速度や加速度に応じた可変値でもよい。図2に示す例では、自車両MVから前方の交差点CPを含む範囲までが自車両マップ生成領域MAとして設定されている。
【0028】
障害物存在確率演算部32では、検出された障害物毎に、周辺の道路形状情報、障害物の現在の位置情報と動き情報及び周辺の交通規則情報に基づいて、障害物のt秒後の存在確率を演算する。
【0029】
この演算方法としては、まず、障害物の現在位置を基準として速度や加速度に基づいてt秒後に存在する位置についての正規分布の平均と分散を演算し、その平均と分散から正規分布の確率分布を演算し、その正規分布の確率分布からt秒後の障害物の存在確率分布を演算する。この存在確率分布は、t秒後に障害物が存在する各確率を同心の楕円状又は円状の各領域で表したものであり、確率が大きくなるほど領域が大きくなる。また、この存在確率分布は、基準となる分布であり、障害物が現在走行中の道路に沿って将来も走行した場合のマップである。ここまでの演算は、従来と同様の方法であり、従来の他の方法で演算してもよい。
【0030】
さらに、交通規則情報を利用し、その存在確率分布が配置される方向や位置あるいは存在確率分布の形状や大きさを変更し、その変更した存在確率分布に基づいて自車両マップ生成領域MAのグリッド状に区画された各エリア(各位置)に存在確率を設定する。以下に、交通規則情報を利用した存在確率の変更方法の具体的な例を示す。
【0031】
図2に示す例では、交差点CPの直進先の道路SRが道路標識で進入禁止NEとなっているので、自車両MVの障害物である先行車両OVは右折先の道路RRと左折先の道路LRへの進入が可能である。そこで、存在確率分布の方向を交差点CPを右折する方向と左折する方向に曲げ、右折の場合の存在確率分布PRと左折の場合の存在確率分布PLとする。ちなみに、図3には、従来の方法による存在確率分布を示しており、従来の方法では道路標識の進入禁止NEを考慮していないので、交差点CPの直進先の道路SRの方向に延びる存在確率分布P(現在の位置情報と動き情報に基づく基準となる存在確率分布に相当)となる。
【0032】
進入禁止以外の交通規則情報を利用した存在確率分布の変更方法の具体的な例を他にも説明する。通行止め、車両通行止めの場合、通行止めの対象となる障害物はその道路に進入できないので、その道路以外の進入可能な道路の方向に存在確率分布を変更する。一方通行の場合、障害物はその一方通行の方向にしか進めないので、その一方通行の方向に存在確率分布を変更する。歩行者専用の場合、歩行者以外の障害物はその道路に進入できないので、その道路以外の進入可能な道路の方向に存在確率分布を変更する。
【0033】
一時停止の場合(信号機が赤信号の場合も同様)、障害物はその一時停止の位置で停止しなければならないので、一時停止線の手前となるように存在確率分布の位置及び大きさを変更する。徐行の場合、障害物は速度を低下させて走行しなければならないので、存在確率分布の位置及び大きさを変更する。これらの場合、基準となる存在確率分布を演算する際の速度や加速度を変更して、一時停止や徐行に対応する存在確率分布を演算するようにするとよい。
【0034】
専用通行帯の場合、障害物に対して車線変更をする経路を考えなくてよいので、現在走行している車線内になるように存在確率分布の形状を変更する。追い越し禁止の場合(道路標示のはみ出し禁止の黄色線も同様)、障害物に対して追い越す経路を考えなくてよいので、現在走行している車線内になるように存在確率分布の形状を変更する。道路標示で立ち入り禁止がある場合、障害物がそのエリアに進入できないので、そのエリアを除外したエリアに分布するように存在確率分布の形状を変更する。
【0035】
自車両存在確率演算部33では、周辺の道路形状情報、自車両の現在の位置情報と動き情報及び走行予定経路に基づいて、自車両のt秒後の存在確率を演算する。この演算方法としては、障害物存在確率演算部32で説明した同様の方法によって、自車両の現在の位置情報と動き情報に基づいて自車両のt秒後の存在確率分布を演算する。そして、自車両の走行予定経路に沿って存在確率分布が配置される方向を設定し、その存在確率分布に基づいて自車両マップ生成領域MAのグリッド状に区画された各エリア(各位置)に存在確率を設定する。走行予定経路がない場合、障害物存在確率演算部32で説明した同様の方法により、交通規則情報を利用して存在確率分布を変更してもよい。
【0036】
衝突危険度演算部34では、検出された障害物毎に、自車両マップ生成領域MAのグリッド状に区画された各エリアにおける障害物の存在確率と自車両の存在確率をそれぞれ乗算し、その各乗算値を各エリアにおける衝突の危険度とする。存在確率を用いた衝突の危険度の演算方法は、この方法以外の他の方法でもよい。
【0037】
支援部35では、検出された障害物毎に、各エリアにおける衝突の危険度が高いと判定した場合、衝突の危険度が高いことや衝突の回避操作が必要なことなどを運転者に知らせる表示用及び音声出力用のメッセージや警告を生成し、そのメッセージや警告を表示するための表示制御信号を表示装置20に送信するとともに音声出力するための音声制御信号を音声出力装置21に送信する。さらに、支援部35では、衝突の危険度が低下しないあるいは更に危険度が高くなったと判定した場合、衝突を回避するための自動ブレーキを作動させるための目標油圧及び/又は自動操舵を行うための目標舵角を演算し、その目標油圧や目標舵角を示す車両制御信号を車両制御装置22に送信する。
【0038】
図1を参照して、運転支援装置1の動作について説明する。特に、ECU30における処理については図4のフローチャートに沿って説明する。図4は、図1のECUにおける処理の流れを示すフローチャートである。ECU30では、以下の処理を一定時間毎に繰り返し実行する。
【0039】
障害物検出装置10では、一定時間毎に、自車両周辺の障害物を検出し、障害物を検出できた場合にはその障害物の情報を取得し、障害物情報信号をECU30に送信する。ECU30では、この障害物情報信号を受信し、障害物の情報を取得する(S1)。
【0040】
交通規則情報取得装置11では、一定時間毎に、自車両周辺の交通規則に関する情報を取得し、交通規則情報信号をECU30に送信する。ECU30では、この交通規則情報信号を受信し、自車両周辺(ひいては、障害物周辺)の交通規則情報を取得する(S2)。
【0041】
道路形状情報取得装置12では、一定時間毎に、自車両周辺の道路形状に関する情報を取得し、道路形状情報信号をECU30に送信する。ECU30では、この道路形状情報信号を受信し、自車両周辺の道路形状情報を取得する(S3)。
【0042】
走行状況検出装置13では、一定時間毎に、自車両の走行状況の情報を検出し、走行状況情報信号をECU30に送信する。ECU30では、この走行状況情報信号を受信し、自車両の走行状況の情報を取得する(S4)。
【0043】
ECU30では、自車両の走行状況の情報に基づいて、自車両マップ生成領域を設定する(S5)。EUC30における以下の処理は、障害物毎に行われ、障害物が存在しない場合には行われない。
【0044】
ECU30では、周辺の道路形状情報、障害物の情報及び周辺の交通規則情報に基づいて、自車両マップ生成領域内における障害物のt秒後の存在確率を演算する(S6)。また、ECU30では、周辺の道路形状情報及び自車両の走行状況の情報に基づいて、自車両マップ生成領域内における自車両のt秒後の存在確率を演算する(S7)。そして、ECU30では、その障害物の存在確率と自車両の存在確率に基づいて、t秒後の自車両に対する衝突の危険度を演算する(S8)。
【0045】
ECU30では、衝突の危険度が高いと判定した場合、運転者に対する表示用及び音声出力用のメッセージあるいは警告を生成し、表示制御信号を表示装置20に送信するとともに音声制御信号を音声出力装置21に送信する(S9)。表示装置20では、この表示制御信号を受信すると、表示制御信号に基づいてメッセージあるいは警告を表示する。また、音声出力装置21では、この音声制御信号を受信すると、音声制御信号に基づいてメッセージあるいは警報を出力する。これらの表示や音声(警報)出力を行っても、衝突の危険度が低下しないあるいは更に高くなったと判定した場合、ECU30では、衝突を回避するための目標制御値を演算し、その目標制御値を示す車両制御信号を車両制御装置22に送信する(S9)。車両制御装置22では、この車両制御信号を受信すると、目標制御値に応じて衝突を回避するためのブレーキ制御及び/又は操舵制御を行い、自動ブレーキ及び/又は自動操舵を行う。一方、衝突の危険度が低いと判定した場合、ECU30では、各制御信号を送信することなく、今回の処理を終了する。
【0046】
この運転支援装置1によれば、障害物のt秒後の存在確率を交通規則情報を考慮して予測することにより、障害物がt秒後に存在し得ない領域に対する予測などがなくなり、障害物のt秒後の存在確率を高精度に予測することができる。その障害物のt秒の存在確率を用いて衝突の危険度を求め、その衝突の危険度を用いて衝突防止支援を行うことにより、適切な支援を行うことができる。
【0047】
特に、運転支援装置1では、交通規則情報によって障害物が将来移動可能な領域(移動可能な方向、道路内での移動可能な範囲など)を絞ることにより、障害物のt秒後の存在確率を高精度に予測することができる。
【0048】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0049】
例えば、本実施の形態では障害物の将来の存在確率を予測し、その存在確率から衝突の危険度を演算し、衝突を防止する運転支援装置に適用したが、衝突防止以外の他の運転支援に適用してもよい。また、本実施の形態では衝突の危険度が高い場合には表示、音声出力、車両制御を行う構成としたが、これらのうちのどれか1つ又は2つだけを行ってもよいし、あるいは、他の手段で支援を行ってもよい。
【0050】
また、本実施の形態では障害物の将来の移動状態をt秒後の存在確率で表したが、障害物の将来の移動状態を表すものとしては他のパラメータを用いてもよい。
【符号の説明】
【0051】
1…運転支援装置、10…障害物検出装置、11…交通規則情報取得装置、12…道路形状情報取得装置、13…走行状況検出装置、20…表示装置、21…音声出力装置、22…車両制御装置、30…ECU、31…自車両マップ生成領域設定部、32…障害物存在確率演算部、33…自車両存在確率演算部、34…衝突危険度演算部、35…支援部。
【特許請求の範囲】
【請求項1】
自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置であって、
前記移動体の現在の移動状態を取得する移動状態取得手段と、
前記移動状態取得手段で取得した移動体の現在の移動状態に基づいて前記移動体の将来の移動状態を予測する移動状態予測手段と、
前記移動体周辺の交通規則情報を取得する交通規則情報取得手段
を備え、
前記移動状態予測手段は、前記交通規則情報取得手段で取得した交通規則情報を用いて前記移動体の将来の移動状態を予測することを特徴とする運転支援装置。
【請求項2】
前記移動状態予測手段は、前記交通規則情報取得手段で取得した交通規則情報に基づいて前記移動体が移動できない領域と認識した場合、当該認識した領域において前記移動体の将来の移動状態を予測しないことを特徴とする請求項1に記載の運転支援装置。
【請求項1】
自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置であって、
前記移動体の現在の移動状態を取得する移動状態取得手段と、
前記移動状態取得手段で取得した移動体の現在の移動状態に基づいて前記移動体の将来の移動状態を予測する移動状態予測手段と、
前記移動体周辺の交通規則情報を取得する交通規則情報取得手段
を備え、
前記移動状態予測手段は、前記交通規則情報取得手段で取得した交通規則情報を用いて前記移動体の将来の移動状態を予測することを特徴とする運転支援装置。
【請求項2】
前記移動状態予測手段は、前記交通規則情報取得手段で取得した交通規則情報に基づいて前記移動体が移動できない領域と認識した場合、当該認識した領域において前記移動体の将来の移動状態を予測しないことを特徴とする請求項1に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−170762(P2011−170762A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−36097(P2010−36097)
【出願日】平成22年2月22日(2010.2.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月22日(2010.2.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]