
運転支援装置
【課題】複数の死角が存在する場合に安全運転支援制御を行うときの運転者に対する不快感を軽減する運転支援装置を提供することを課題とする。
【解決手段】車両からの死角に対して安全運転支援制御を行う運転支援装置であって、車両の周辺環境を認識する周辺環境認識手段と、その認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、死角検出手段での検出結果に基づいて第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、安全運転支援制御を稼動した後に、死角検出手段での検出結果に基づいて第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段を備えることを特徴とする。
【解決手段】車両からの死角に対して安全運転支援制御を行う運転支援装置であって、車両の周辺環境を認識する周辺環境認識手段と、その認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、死角検出手段での検出結果に基づいて第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、安全運転支援制御を稼動した後に、死角検出手段での検出結果に基づいて第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両からの死角に対して安全運転支援制御を行う運転支援装置に関する。
【背景技術】
【0002】
車両が安全に走行するための様々な運転支援装置が開発されている。例えば、車両が走行しているときに建造物や駐車車両あるいは対向車両等によって発生する死角を検出し、その死角から歩行者などが飛び出してくることを仮定して安全な速度まで自車両を減速制御し、死角がなくなると加速制御する。特許文献1に記載の装置では、死角を検出すると、死角に存在する移動物体が自車両の進行上の所定の位置まで到達する時間を算出するとともに自車両がその所定の位置まで到達する時間を算出し、この各時間を比較することによって衝突の可能性を判定し、衝突の可能性の高い場合に運転支援を行う。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−230455号公報
【特許文献2】特開2009−237776号公報
【特許文献3】特開2008−171207号公報
【特許文献4】特開2009−301400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
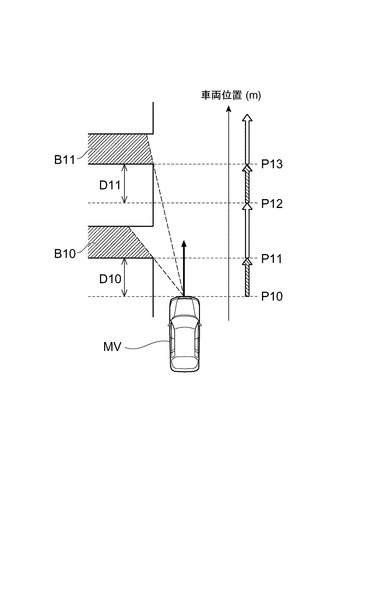
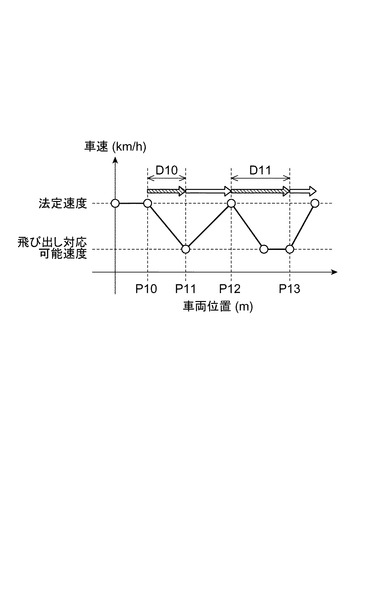
図11に示すように、自車両MVから複数の死角B10,11を検出している場合、自車両MVが進行している各位置で衝突の可能性を判定すると、自車両MVの位置によって衝突の可能性が高い状態と低い状態を繰り返す。その結果、死角を通過するまでの安全な速度までの減速と死角通過後の加速が繰り返され、乗り心地が低下し、運転者が不快感を受ける。例えば、図12に示すように、死角B10に対して地点P10から地点P11の距離D10の区間で安全な速度まで減速し、死角B10がなくなった地点P11から加速し、再度、死角B11に対して地点P12から地点P13の距離D11の区間で安全な速度まで減速し、死角B11がなくなった地点P13から加速する。
【0005】
そこで、本発明は、複数の死角が存在する場合に安全運転支援制御を行うときの運転者に対する不快感を軽減する運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、車両からの死角に対して安全運転支援制御を行う運転支援装置であって、車両の周辺環境を認識する周辺環境認識手段と、周辺環境認識手段で認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、死角検出手段での検出結果に基づいて、第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、制御稼動手段で安全運転支援制御を稼動した後に、死角検出手段での検出結果に基づいて、第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段を備えることを特徴とする。
【0007】
この運転支援装置では、周辺環境認識手段によって車両の周辺環境を認識し、死角検出手段によってその周辺環境に基づいて車両からの死角を検出する。そして、運転支援装置では、制御稼動手段によって、死角検出手段での検出結果に基づいて第1条件を満たすか否かを判定し、第1条件を満たした場合には死角に対する安全運転支援制御(例えば、減速制御)を稼動させる。安全運転支援制御を稼動後、運転支援装置では、制御停止手段によって、死角検出手段での検出結果に基づいて第1条件とは異なる第2条件を満たすか否かを判定し、第2条件を満たさない場合には安全運転支援制御を停止させる。このように、運転支援装置では、死角に対する安全運転支援制御の稼動条件と停止条件を異なる条件とすることにより、複数の死角が存在する場合でも安全運転支援制御の稼動/停止を繰り返し行うことを抑制でき、運転者の不快感を軽減できる。
【0008】
本発明の上記運転支援装置では、死角の種類に応じて第1条件と第2条件を補正すると好適である。
【0009】
この運転支援装置では、死角の種類(例えば、どのような道路構造による死角か、他車両などの移動物体による死角か)に応じて第1条件と第2条件を補正することにより、死角の種類に応じて安全運転支援制御を行う必要があるのか否かを判断でき、不要な安全運転支援制御の稼動を抑制できる。その結果、不要な安全運転支援がなくなり、運転者の不快感を抑制でき、車両側で車速制御している場合には旅行時間を短縮できる。
【0010】
本発明の上記運転支援装置では、死角内に存在する可能性のある移動物体との衝突の可能性を判断する衝突可能性判断手段と、衝突可能性判断手段で衝突の可能性がないと判断した場合には第1条件及び第2条件による判定対象から除外する除外手段を備える構成としてもよい。
【0011】
この運転支援装置では、衝突可能性判断手段によって、死角内から移動物体が飛び出してくると仮定して衝突の可能性を判断する。そして、運転支援装置では、除外手段によって、衝突可能性判断手段で移動物体が飛び出したとしても衝突の可能性がないと判断した死角については第1条件及び第2条件による判定対象から除外し、安全運転支援制御を稼動させない。このように、運転支援装置では、死角から飛び出した移動物体との衝突可能性がない判断した場合には第1条件及び第2条件による判定を行うことなく安全運転支援制御を稼動させないので、不要な安全運転支援制御の稼動を抑制できる。その結果、不要な安全運転支援がなくなり、運転者の不快感を抑制でき、車両側で車速制御している場合には旅行時間を短縮できる。
【発明の効果】
【0012】
本発明は、死角に対する安全運転支援制御の稼動条件と停止条件を異なる条件とすることにより、複数の死角が存在する場合でも安全運転支援制御の稼動/停止を繰り返し行うことを抑制でき、運転者の不快感を軽減できる。
【図面の簡単な説明】
【0013】
【図1】第1及び第3の実施の形態に係る車両速度制御装置の構成図である。
【図2】道路構造によって複数の死角が発生する場合の一例である。
【図3】図2の複数の死角に対して第1の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【図4】第1の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【図5】第2の実施の形態に係る車両速度制御装置の構成図である。
【図6】道路構造によって複数の死角が発生する場合の他の例である。
【図7】図6の複数の死角に対して第2の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【図8】第2の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【図9】対向車両によって複数の死角が発生する場合の一例である。
【図10】第3の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【図11】道路構造によって複数の死角が発生する場合の一例である。
【図12】図11の複数の死角に対して従来の車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0015】
本実施の形態では、本発明に係る運転支援装置を、自動運転又はオートクルーズなどの車両側で速度制御を行う車両速度制御装置に適用する。本発明に係る車両速度制御装置は、通常は法定速度で走行するように一定車速制御を行い、死角を検出すると安全な速度まで減速制御を行う。本実施の形態には3つの形態があり、第1の実施の形態が複数の死角を検出した場合に全ての死角がなくなるまで安全な速度を維持する形態であり、第2の実施の形態が死角を検出した場合に死角からの飛び出しの可能性の高い死角に対してのみ安全な速度まで減速する形態であり、第3の実施の形態が対向車両による死角を検出した場合に死角から飛び出せる状況のときにのみ安全な速度まで減速する形態である。
【0016】
まず、図1〜図3を参照して、第1の実施の形態に係る車両速度制御装置1について説明する。図1は、第1及び第3の実施の形態に係る車両速度制御装置の構成図である。図2は、道路構造によって複数の死角が発生する場合の一例である。図3は、図2の複数の死角に対して第1の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【0017】
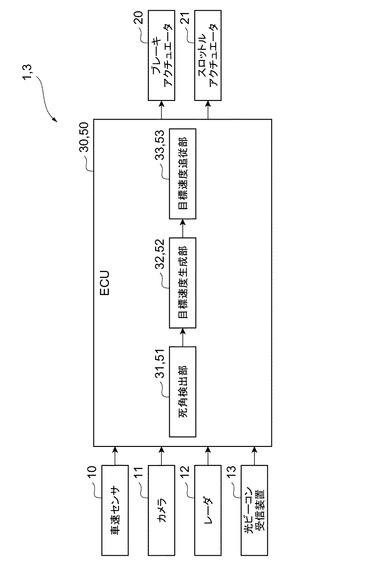
車両速度制御装置1は、複数の死角を検出している場合には最初の死角のときに安全な速度まで減速し、最後の死角がなくなるまで安全な速度を維持する。車両速度制御装置1は、車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13、ブレーキアクチュエータ20、スロットルアクチュエータ21及びECU[Electronic Control Unit]30を備えている。なお、本実施の形態では、カメラ11、レーダ12及び光ビーコン受信装置13が特許請求の範囲に記載する周辺環境認識手段に相当する。
【0018】
車速センサ10は、自車両の車速を検出するセンサである。車速センサ10では、車速を検出し、その車速を車速信号としてECU30に送信する。
【0019】
カメラ11は、自車両の周辺(少なくとも前方であり、必要に応じて側方、後方も)を撮像するカメラである。カメラ11では、自車両の周辺を撮像し、その撮像画像のデータを画像信号としてECU30に送信する。
【0020】
レーダ12は、自車両の周辺(少なくとも前方であり、必要に応じて側方、後方も)の物体を検出するためのレーダである。レーダ12としては、例えば、レーザレーダ、ミリ波レーダがある。レーダ12では、電磁波を水平面内でスキャンしながら送信し、物体に反射して戻ってくる反射波を受信し、その送受信に関する情報を検出する。そして、レーダ12では、その検出した送受信情報をレーダ信号としてECU30に送信する。
【0021】
光ビーコン受信装置13は、光ビーコンアンテナや処理装置などを備えており、光ビーコンから近赤外線によって情報を受信する受信装置である。光ビーコン受信装置13では、光ビーコンアンテナでダウンリンクエリア内で光ビーコンからの信号を受信する。光ビーコン受信装置13では、処理装置でその受信した信号を復調してインフラ情報を取り出し、そのインフラ情報をインフラ信号としてECU30に送信する。インフラ情報には、交通情報の他に、道路構造情報などの死角の発生原因となる情報を含むものとする。死角の発生原因となる情報としては、道路に面している建造物、フェンス、樹木などがある。
【0022】
ブレーキアクチュエータ20は、各車輪のホイールシリンダのブレーキ油圧を調整するアクチュエータである。ブレーキアクチュエータ20では、ECU30からのブレーキ制御信号を受信すると、ブレーキ制御信号の示される目標ブレーキ油圧に応じて作動し、ホイールシリンダのブレーキ油圧を調整する。
【0023】
スロットルアクチュエータ21は、エンジンのスロットルバルブの開度を調整するアクチュエータである。スロットルアクチュエータ21では、ECU30からのエンジン制御信号を受信すると、エンジン制御信号に示される目標開度に応じて作動し、スロットルバルブの開度を調整する。
【0024】
ECU30は、CPU[Central Processing Unit]や各種メモリ等からなり、車両速度制御装置1を統括制御する。ECU30では、メモリに格納されている各アプリケーションプログラムをロードし、CPUで実行することによって死角検出部31、目標速度生成部32、目標速度追従部33が構成される。ECU30では、車速センサ10からの車速信号、カメラ11からの画像信号、レーダ12からのレーダ信号、光ビーコン受信装置13からのインフラ信号をそれぞれ受信する。そして、ECU30では、受信したこれらの各信号に基づいて各部31、32、33での処理を行い、必要に応じてブレーキ制御信号をブレーキアクチュエータ20に送信し、エンジン制御信号をスロットルアクチュエータ21に送信する。なお、第1の実施の形態では、死角検出部31が特許請求の範囲に記載する死角検出手段に相当し、目標速度生成部32及び目標速度追従部33が特許請求の範囲に記載する制御稼動手段及び制御停止手段に相当する。
【0025】
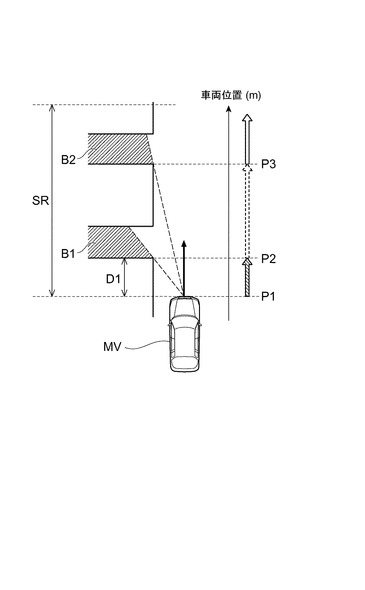
死角検出部31では、一定時間毎に、カメラ11による画像情報、レーダ12によるレーダ情報、光ビーコン受信装置13によるインフラ情報(特に、道路構造情報)に基づいて、死角の発生要因となる物体(建造物、フェンス、樹木、駐車車両などの静止物体、走行中の他車両、歩行者などの移動物体)を検出し、検出した各物体についての情報(物体の位置、物体の大きさ(横方向の長さ、奥行き方向の長さ、高さなど)や形状、物体までの距離、物体が存在する方向、移動物体の場合には移動速度や移動方向)を取得する。そして、死角検出部31では、死角の発生要因となる物体を検出できた場合、その物体の大きさや形状などからその物体で発生する死角を検出し、その検出した死角の情報(センサレンジ内で検出できた死角の領域(位置を含む)、死角の数、死角の発生要因など)を取得する。センサレンジは、基本的にはカメラ11やレーダ12などのセンサの中で最も遠方まで検出可能なセンサの検出範囲であるが、検出性能の高いセンサの検出範囲としてもよい。図2には、センサレンジSR内で検出できた死角の一例を示しており、この例では、自車両MVの左側の建造物などによって発生した2つの死角B1,B2が存在する。なお、死角の検出方法については、従来の方法を適用する。
【0026】
目標速度生成部32では、目標速度として法定速度が設定されている場合、一定時間毎に、死角検出部31で死角が検出されているか否か(死角となる領域が存在するか否か)を判定する。死角検出部31で死角が検出されていない場合、目標速度生成部32では、目標速度として法定速度を設定し続ける。死角検出部31で死角が検出されている場合、目標速度生成部32では、目標速度として法定速度から飛び出し対応可能速度に切り替え設定する。飛び出し対応可能速度は、死角から歩行者などが飛び出してきた場合でも自車両がその手前で十分に停止可能な低速度(安全な速度)である。飛び出し対応可能速度は、自車両のブレーキ性能を考慮し、実車実験などによって設定される。
【0027】
目標速度生成部32では、目標速度として飛び出し対応可能速度が設定されている場合、一定時間毎に、死角検出部31でセンサレンジ内で死角が検出されているか否か(死角となる領域がセンサレンジ内にまだ存在するか否か)を判定する。センサレンジ内で死角が検出されていない場合(すなわち、自車両がセンサレンジ内の全ての死角を通過した場合)、目標速度生成部32では、目標速度として飛び出し対応可能速度から法定速度に切り替え設定する。一方、センサレンジ内で死角が検出されている場合(すなわち、自車両がセンサレンジ内の全ての死角を通過していない場合)、目標速度生成部32では、目標速度として飛び出し対応可能速度を設定し続ける。なお、センサレンジ内に1つの死角が検出されている場合にはその1つの死角を通過するまで飛び出し対応可能速度が維持され、センサレンジ内に複数の死角が検出されている場合にはその複数の死角を全て通過するまで飛び出し対応可能速度が維持される。
【0028】
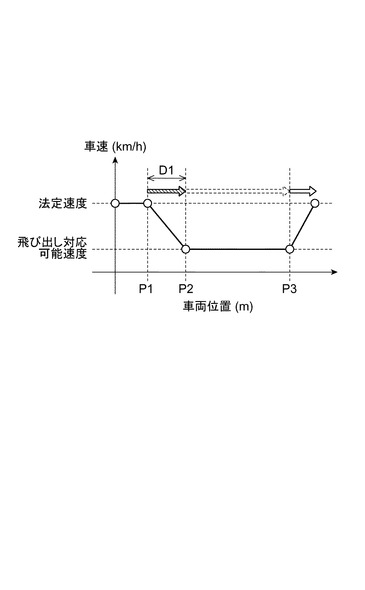
図2の例の場合、まず、図3に示すように、自車両MVが死角B1から距離D1手前の地点P1を通過するときに目標速度が法定速度から飛び出し対応可能速度に切り替えられる。自車両MVが死角B1が死角でなくなる地点P2を通過するときには、センサレンジSR内では死角B2も検出されているので、目標速度は飛び出し対応可能速度が維持される。そして、自車両MVが死角B2が死角でなくなる地点P3を通過するときまで目標速度として飛び出し対応可能速度が維持され、地点P3を通過するときに目標速度が飛び出し対応可能速度から法定速度に切り替えられる。
【0029】
目標速度追従部33では、一定時間毎に、目標速度生成部32で設定している目標速度と車速センサ10による自車両の現在車速との差に基づいて、自車両の車速が目標車速になるために必要な目標加減速度を算出する。目標加減速度がプラス値の場合、目標速度追従部33では、目標加速度を設定し、その目標加速度となるために必要なスロットルバルブの目標開度を設定し、その目標開度をエンジン制御信号としてスロットルアクチュエータ21に送信する。目標加減速度がマイナス値の場合、目標速度追従部33では、目標減速度を設定し、その目標減速度になるために必要な各輪のホイールシリンダの目標ブレーキ油圧を設定し、その目標ブレーキ油圧をブレーキ制御信号としてブレーキアクチュエータ20に送信する。なお、目標速度追従部33では、目標速度生成部32で法定速度を維持している場合には一定車速制御となり、法定速度から飛び出し対応可能速度に切り替えた場合(安全運転支援制御が稼動)には減速制御となり、飛び出し対応可能速度を維持している場合(安全運転支援制御の稼動継続)には速度維持制御となり、飛び出し対応可能速度から法定速度に切り替えた場合(安全運転支援制御が停止)には加速制御となる。
【0030】
図1を参照して、車両速度制御装置1の動作について説明する。特に、ECU30における車両速度制御について図4のフローチャートに沿って説明する。図4は、第1の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【0031】
車速センサ10では、一定時間毎に、自車両の車速を検出し、車速信号をECU30に送信している。カメラ11では、一定時間毎に、自車両の周辺を撮像し、画像信号をECU30に送信している。レーダ12では、一定時間毎に、電磁波を水平面内でスキャンしながら送信するとともに反射波を受信し、レーダ信号をECU30に送信している。光ビーコン受信装置13では、光ビーコンからのダウンリンクエリアを自車両が走行しているときに、光ビーコンからの信号を受信し、インフラ情報を取り出して、インフラ信号をECU30に送信している。
【0032】
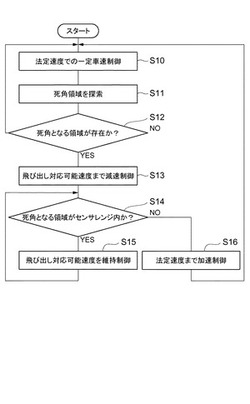
ECU30では、通常、一定時間毎に、目標速度を法定速度とし、法定速度と自車両の現在車速との差に基づいて自車両の車速が法定速度を維持するために必要な目標加減速度を算出し、目標加減速度に基づいて減速制御を行う場合には目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信し、加速制御を行う場合には目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S10)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、ブレーキ制御信号に応じて作動し、ホイールシリンダのブレーキ油圧を調整する。あるいは、スロットルアクチュエータ21では、エンジン制御信号を受信すると、エンジン制御信号に応じて作動し、スロットルバルブの開度を調整する。これによって、自車両は、法定速度での一定車速で走行する。
【0033】
ECU30では、一定時間毎に、画像情報、レーダ情報、インフラ情報に基づいて、死角の探索を行い、死角を探索できた場合にはその死角の情報(死角の領域、死角の数、死角の発生要因など)を取得する(S11)。ECU30では、探索結果に基づいて、死角となる領域が存在するか否かを判定する(S12)。S12にて死角となる領域が存在しないと判定した場合、ECU30では、S10の処理に戻って、法定速度での一定車速制御を継続する。なお、S12の判定では、死角となる領域が複数存在するか否かを判定してもよい。
【0034】
S12にて死角となる領域が存在すると判定した場合、ECU30では、目標車速として飛び出し対応可能速度(安全な速度)を設定し、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度になるために必要な目標減速度を算出し、その目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信する(S13)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度まで減速する。
【0035】
ECU30では、死角となる領域がセンサレンジ内にまだ存在するか否かを判定する(S14)。S14にて死角となる領域がセンサレンジ内にまだ存在すると判定した場合、ECU30では、目標車速として飛び出し対応可能速度を設定し続け、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度を維持するために必要な目標加減速度を算出し、目標加減速度に基づいて減速制御を行う場合には目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信し、加速制御を行う場合には目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S15)。ブレーキアクチュエータ20あるいはスロットルアクチュエータ21では、制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度を維持して走行する。
【0036】
S14にて死角となる領域がセンサレンジ内に存在しないと判定した場合、ECU30では、目標車速として法定速度を設定し、法定速度と自車両の現在車速との差に基づいて自車両の車速が法定速度になるために必要な目標加速度を算出し、その目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S16)。スロットルアクチュエータ21では、エンジン制御信号を受信すると、上記と同様に動作する。これによって、自車両は、法定速度まで加速する。そして、ECU30では、S10の処理に戻って、法定速度での一定車速制御を継続する。
【0037】
車両速度制御装置1によれば、センサレンジ内に複数の死角がある場合でも、一度減速したら死角がなくなるまでは減速後の安全な速度を維持することにより、減速と加速を繰り返すことがなく、乗り心地の低下を抑制でき、運転者の不快感を軽減できる。
【0038】
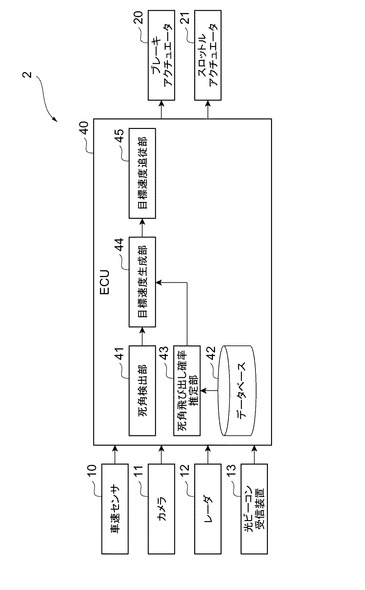
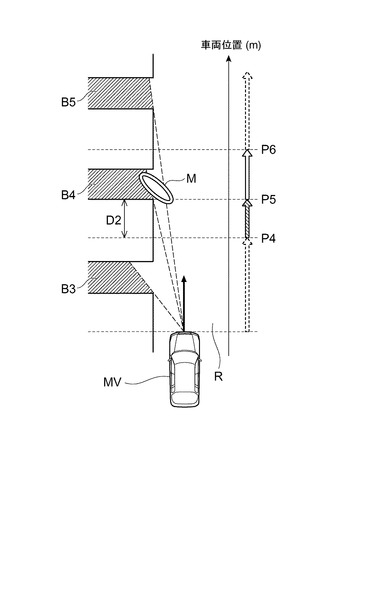
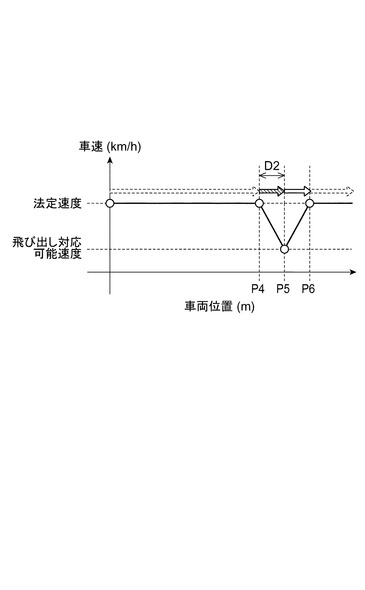
図5〜図7を参照して、第2の実施の形態に係る車両速度制御装置2について説明する。図5は、第2の実施の形態に係る車両速度制御装置の構成図である。図6は、道路構造によって複数の死角が発生する場合の他の例である。図7は、図6の複数の死角に対して第2の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【0039】
車両速度制御装置2は、死角を検出している場合でも死角からの飛び出しの可能性のある死角に対してのみ安全な速度まで減速する。車両速度制御装置2は、車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13、ブレーキアクチュエータ20、スロットルアクチュエータ21及びECU40を備えている。車両速度制御装置2では、第1の実施の形態に係る車両速度制御装置1と比較すると、ECU40の構成だけが異なるので、ECU40についてのみ説明する。
【0040】
ECU40は、CPUや各種メモリ等からなり、車両速度制御装置2を統括制御する。ECU40では、メモリに格納されている各アプリケーションプログラムをロードし、CPUで実行することによって死角検出部41、死角飛び出し確率推定部43、目標速度生成部44、目標速度追従部45が構成され、データベース42を備えている。ECU40の死角検出部41と目標速度追従部45については、第1の実施の形態に係るECU30の死角検出部31と目標速度追従部33と同様の処理を行うので、説明を省略する。
【0041】
データベース42は、死角が発生する可能性のある領域毎に、死角からの歩行者などの移動物体の飛び出し確率に関する情報を格納したデータベースである。飛び出し確率に関する情報としては、例えば、死角領域における人通り(時間帯、曜日、天気など毎に)、死角からの飛び出しによる事故発生率(時間帯、曜日、天気など毎に)、スクールゾーンなどの標識の有無、カーブミラーの有無、道路幅がある。
【0042】
死角飛び出し確率推定部43では、死角検出部31で死角を検出している場合、検出している死角毎に、データベース42から飛び出し確率に関する情報を取得するとともに、カメラ11による画像情報、レーダ12によるレーダ情報、光ビーコン受信装置13によるインフラ情報から飛び出し確率に関する情報を取得する。そして、死角飛び出し確率推定部43では、取得した各情報に基づいて、死角からの移動物体の飛び出し確率を推定する。この推定方法としては、例えば、死角領域での人通りが多いほど、死角からの飛び出しによる事故発生率が高いほど、スクールゾーンなどの標識がある場合、カーブミラーが設置されている場合に、飛び出し確率を高くする。この推定方法については、様々な方法が適用可能である。
【0043】
図6に示す例の場合、3つの死角B3,B4,B5があり、その中の死角B4にのみカーブミラーMが設置してある。このようにカーブミラーMが設置されるのは、死角B4から道路Rに歩行者などの移動物体が出てくることが多く、安全性向上のために道路Rの走行中の車両の運転者が死角B4の状況を確認するためである。一方、死角B3,B5についてはカーブミラーが設置されていないので、普段、死角B3,B5からは道路Rに移動物体が出てくることは殆どないと考えられる。このような場合、死角B4に対して飛び出し確率を高くして減速を行い、死角B3,B5については飛び出し確率を低くして減速を行わない。
【0044】
目標速度生成部44では、目標速度として法定速度が設定されている場合、一定時間毎に、死角検出部41で死角が検出されているか否かを判定する。死角検出部41で死角が検出されていない場合、目標速度生成部44では、目標速度として法定速度を設定し続ける。死角検出部41で死角が検出されている場合、目標速度生成部44では、死角飛び出し確率推定部43で算出した飛び出し確率が閾値より大きいか否かを判定する。閾値は、飛び出し確率に基づいて死角から飛び出す可能性のあることを判定するための閾値であり、シミュレーションや実車実験などによって予め設定される。飛び出し確率が閾値より大きい場合、目標速度生成部44では、死角から移動物体が飛び出してくる可能性があると判断し、目標速度として法定速度から飛び出し対応可能速度に切り替え設定する。
【0045】
目標速度生成部44では、目標速度として飛び出し対応可能速度が設定されている場合、一定時間毎に、死角飛び出し確率推定部43で算出した飛び出し確率が閾値より大きいか否かを判定する。飛び出し確率が閾値以下の場合、目標速度生成部44では、死角から移動物体が飛び出してくる可能性がないと判断し、目標速度として飛び出し対応可能速度から法定速度に切り替え設定する。
【0046】
図6の例の場合、図7に示すように、自車両MVが最初の死角B3の手前に到達しても、目標速度として法定速度が維持される。そして、自車両MVが次の死角B4から距離D2手前の地点P4を通過するときに目標速度が法定速度から飛び出し対応可能速度に切り替えられ、自車両MVが減速する。死角B4が死角でなくなる地点P5を通過するときには目標速度が飛び出し対応可能速度から法定速度に切り替えられ、自車両MVが加速する。そして、自車両MVが最後の死角B5の手前の地点P6に到達しても、目標速度として法定速度が維持される。
【0047】
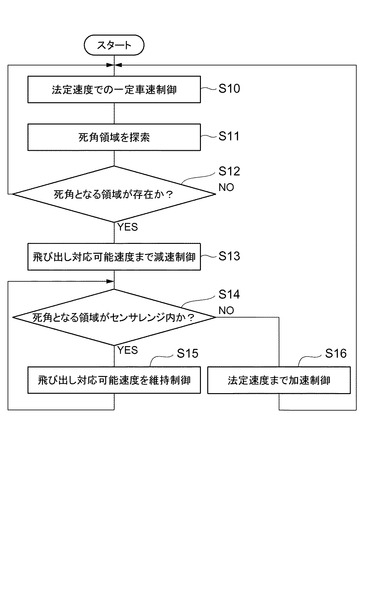
図5を参照して、車両速度制御装置2の動作について説明する。特に、ECU40における車両速度制御について図8のフローチャートに沿って説明する。図8は、第2の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【0048】
車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13については、第1の実施の形態での動作説明と同様に動作している。
【0049】
ECU40では、通常、一定時間毎に、第1の実施の形態におけるS10での処理と同様に、法定速度での一定車速制御を行う(S20)。ブレーキアクチュエータ20あるいはスロットルアクチュエータ21では、ブレーキ制御信号あるいはエンジン制御信号を受信すると、第1の実施の形態における動作説明と同様に動作する。これによって、自車両は、法定速度での一定車速で走行する。
【0050】
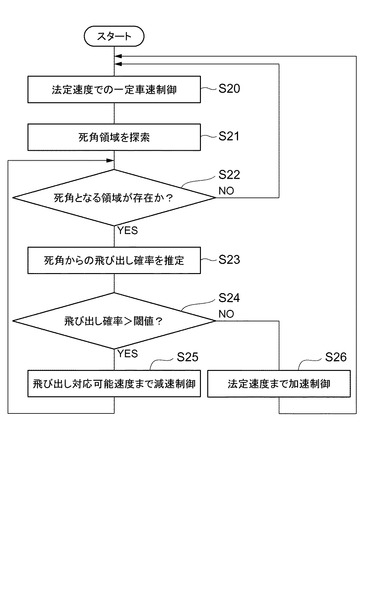
ECU40では、第1の実施の形態におけるS11での処理と同様に、死角領域を探索する(S21)。そして、ECU40では、死角となる領域が存在するか否かを判定する(S22)。S22にて死角となる領域が存在しないと判定した場合、ECU40では、S20の処理に戻って、法定速度での一定車速制御を継続する。
【0051】
S22にて死角となる領域が存在すると判定した場合、ECU40では、検出している死角毎に、データベース42の飛び出し確率に関する情報、カメラ11による画像情報、レーダ12によるレーダ情報、光ビーコン受信装置13によるインフラ情報に基づいて、死角からの移動物体の飛び出し確率を推定する(S23)。そして、ECU40では、死角についての飛び出し確率が閾値よりも大きいか否かを判定する(S24)。
【0052】
S24にて飛び出し確率が閾値よりも大きいと判定した場合、ECU40では、目標車速として飛び出し対応可能速度を設定し、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度になるために必要な目標減速度を算出し、その目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信する(S25)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度まで減速する。
【0053】
目標車速として飛び出し対応可能速度が設定されているときに、S24にて飛び出し確率が閾値以下と判定した場合、ECU40では、目標車速として法定速度を設定し、法定速度と自車両の現在車速との差に基づいて自車両の車速が法定速度になるために必要な目標加速度を算出し、その目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S26)。スロットルアクチュエータ21では、エンジン制御信号を受信すると、上記と同様に動作する。これによって、自車両は、法定速度まで加速する。そして、ECU30では、S20の処理に戻って、法定速度での一定車速制御を継続する。あるいは、目標車速として法定速度が設定されているときに、S24にて飛び出し確率が閾値以下と判定した場合、ECU40では、そのままS20の処理に戻って、法定速度での一定車速制御を継続する。
【0054】
この車両速度制御装置2によれば、死角からの移動物体の飛び出し確率が高い死角についてのみ減速を行うので、安全性を確保しつつ旅行時間を短縮することができる。特に、複数の死角がある場合でも、減速が不要な死角に対して減速を行わないので、減速と加速の繰り返しを抑制でき、乗り心地の低下を抑制でき、運転者の不快感を軽減できる。
【0055】
図1及び図9を参照して、第3の実施の形態に係る車両速度制御装置3について説明する。図1は、第1及び第3の実施の形態に係る車両速度制御装置の構成図である。図9は、対向車両によって複数の死角が発生する場合の一例である。
【0056】
車両速度制御装置3は、移動物体(特に、対向車両)による死角を検出している場合にはその死角から移動物体(歩行者など)が飛び出してくる可能性があるかを判断し、移動物体が飛び出してくる可能性があると安全な速度まで減速する。車両速度制御装置3は、車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13、ブレーキアクチュエータ20、スロットルアクチュエータ21及びECU50を備えている。車両速度制御装置3では、第1の実施の形態に係る車両速度制御装置1と比較すると、ECU50の処理だけが異なるので、ECU50についてのみ説明する。なお、車両速度制御装置3は、静止物体による死角を検出している場合には第1の実施の形態に係る車両速度制御装置1又は第2の実施の形態に係る車両速度制御装置2と同様の制御を行う。
【0057】
ECU50は、CPUや各種メモリ等からなり、車両速度制御装置3を統括制御する。ECU50では、メモリに格納されている各アプリケーションプログラムをロードし、CPUで実行することによって死角検出部51、目標速度生成部52、目標速度追従部53が構成される。ECU50の死角検出部51と目標速度追従部53については、第1の実施の形態に係るECU30の死角検出部31と目標速度追従部33と同様の処理を行うので、説明を省略する。なお、第3の実施の形態では、死角検出部51が特許請求の範囲に記載する死角検出手段に相当し、目標速度生成部52及び目標速度追従部53が特許請求の範囲に記載する制御稼動手段及び制御停止手段に相当し、目標速度生成部52が特許請求の範囲に記載する衝突可能性判断手段及び除外手段に相当する。
【0058】
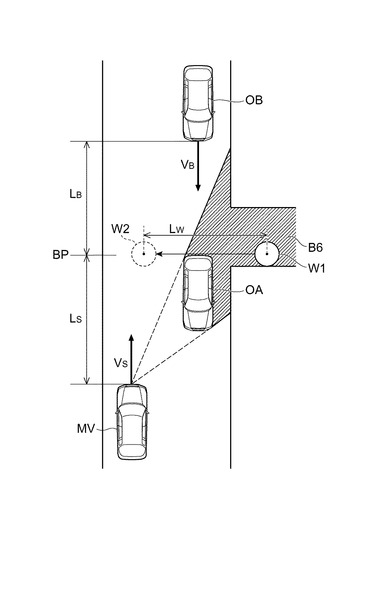
目標速度生成部52では、一定時間毎に、死角検出部31での検出結果に基づいて対向車両による死角が発生しているか否かを判定する。図9の例で示すように、自車両MVででは、前方から走行してくる対向車両OAによって死角B6が発生している。
【0059】
対向車両による死角が発生している場合、目標速度生成部52では、車速センサ10による自車両の現在車速VSと自車両の現在位置から基準地点までの距離LSを用いて、自車両が基準地点を通過するまでの時間TS(=LS/VS)を算出する。図9に示すように、基準地点BPは、死角B6を発生させる対向車両OAの後端部辺りの地点とする。自車両MVがこの基準地点BPを通過するまでの時間が算出される。ちなみに、歩行者が車両が走行している道路を横断する場合、歩行者は道路の端部の地点W1で待機し、対向車両OAの後端が歩行者の前を通過した直ぐ後に飛び出してゆくと考えられる。基準地点BP、距離LSについては、死角検出部51で取得している対向車両についての情報から取得できる。
【0060】
また、目標速度生成部52では、死角内に歩行者(移動物体)が存在すると仮定し、歩行者の最高速度Vmaxと死角が発生している道路の端部から自車両の進路上の地点までの距離LWを用いて、歩行者が自車両の進路上に飛び出してくまでの最短時間TW(=LW/Vmax)を算出する。図9に示す例では、歩行者が死角B6が発生している道路の端部の地点W1から自車両MVの進路上の地点W2までの距離LWを移動するための最短時間が算出される。最高速度Vmaxについては、実験などによって予め設定しておく。距離LWについては、道路構造から取得できる。
【0061】
また、目標速度生成部52では、死角を発生させる対向車両の後続車両の車速VBとその後続車両から基準地点までの距離LB(対向車両とその後続車両との車間距離に相当)を用いて、対向車両の後続車両が基準地点を通過するまでの時間TB(=LB/VB)を算出する。図9に示す例の場合、死角B6を発生させる対向車両OAの後方には車両OBが走行しており、その後続車両OBが基準地点BPを通過するまでの時間が算出される。ちなみに、歩行者が対向車両OAを通過後に道路を横断するためには、後続車両OBが基準地点BPを通過する前に地点W2まで移動しなければならない。車速VB、距離LBについては、死角検出部51で取得している対向車両の後続車両についての情報から取得できる。
【0062】
目標速度生成部52では、自車両が基準地点を通過するまでの時間TSと歩行者が自車両の進路上に飛び出してくまでの最短時間TWとがほぼ同じ時間か否かを判定する。ここでの判定では、実車実験などで設定した短時間の範囲を設け、時間TSを基準にしてその短時間範囲内に時間TWが入れば時間TSと時間TWとがほぼ同じ時間と判定する。この時間TSと時間TWとがほぼ同じであれば歩行者が死角から飛び出してきた場合に歩行者が自車両と衝突する可能性が高いと考えられ、この時間TSと時間TWとが明らかに異なっていれば歩行者が死角から飛び出してきた場合でも歩行者が横断した後に自車両が通過するかあるいは歩行者が横断する前に自車両が通過すると考えられる。そこで、時間TSと時間TWとが明らかに異なっている場合、対向車両が通過直後に死角内の歩行者が飛び出したとしても自車両と衝突する可能性がないので(自車両は減速する必要がない)、目標速度生成部52では、目標速度として法定速度を設定し続ける。
【0063】
時間TSと時間TWとがほぼ同じ場合(死角内の歩行者が飛び出したときには自車両と衝突する可能性がある場合)、目標速度生成部52では、対向車両の後続車両が基準地点を通過するまでの時間TBが歩行者が自車両の進路上に飛び出してくまでの最短時間TWより長いか否かを判定する。図9の例で示すように、対向車両OAと後続車両OBとの車間距離が短く、歩行者が地点W2まで移動する前に後続車両OBが基準地点BPを通過するような場合、歩行者は対向車両OAが通過しても飛び出さないと考えられる。一方、対向車両OAと後続車両OBとの車間距離が長く、後続車両OBが基準地点BPを通過する前に歩行者が地点W2まで移動できる場合、歩行者は対向車両OAが通過すると飛び出すと考えられる。そこで、時間TBが時間TW以下の場合、死角内に歩行者が存在したとしても飛び出さないので(自車両は減速する必要がない)、目標速度生成部52では、目標速度として法定速度を設定し続ける。一方、時間TBが時間TWより長い場合、死角内の歩行者が飛び出す可能性あるので(自車両は減速する必要がある)、目標速度生成部52では、目標速度として法定速度から飛び出し対応可能速度に切り替え設定する。
【0064】
なお、目標速度生成部52では、対向車両(移動物体)による死角に対して上記処理を行い、静止物体による死角に対しては第1の実施の形態に係る目標速度生成部32又は第2の実施の形態に係る目標速度生成部44での処理を行う。また、上記の説明では、対向車両による死角としたが、車両以外の移動物体で死角ができる場合にはその移動物体による死角についての上記処理を適用する。
【0065】
図1を参照して、車両速度制御装置3の動作について説明する。特に、ECU50における車両速度制御について図10のフローチャートに沿って説明する。図10は、第3の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【0066】
車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13については、第1の実施の形態での動作説明と同様に動作している。
【0067】
ECU50では、通常、一定時間毎に、第1の実施の形態におけるS10での処理と同様に、法定速度での一定車速制御を行う(S30)。ブレーキアクチュエータ20あるいはスロットルアクチュエータ21では、ブレーキ制御信号あるいはエンジン制御信号を受信すると、第1の実施の形態における動作説明と同様に動作する。これによって、自車両は、法定速度での一定車速で走行する。
【0068】
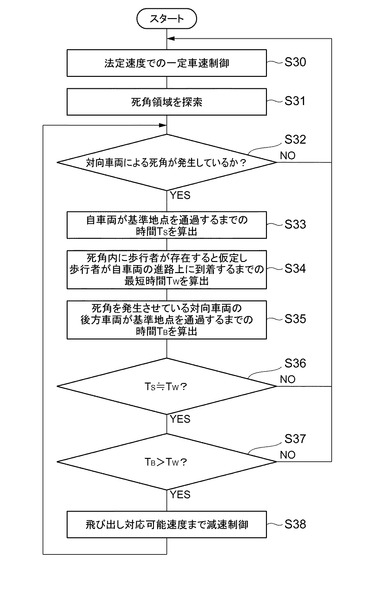
ECU50では、第1の実施の形態におけるS11での処理と同様に、死角領域を探索する(S31)。そして、ECU50では、その探索結果に基づいて、対向車両による死角が発生しているかを判定する(S32)。S32にて対向車両による死角が発生していないと判定した場合、ECU50では、S30の処理に戻って、法定速度での一定車速制御を継続する。なお、ここでは、S30の処理に戻るとしたが、ECU50では、静止物体による死角領域が存在する場合には第1の実施の形態又は第2の実施の形態で動作説明した処理に移行すればよい。
【0069】
S32にて対向車両による死角が発生していると判定した場合、ECU50では、自車両の現在車速VSと基準地点までの距離LSに基づいて自車両が基準地点を通過するまでの時間TSを算出する(S33)。また、ECU50では、死角内に歩行者が存在すると仮定し、歩行者の最高速度Vmaxと死角が発生している道路の端部から自車両の進路上の地点までの距離LWに基づいて歩行者が自車両の進路上に到着するまでの最短時間TWを算出する(S34)。また、ECU50では、死角を発生させる対向車両の後続車両の車速VBとその後続車両から基準地点までの距離LBに基づいて対向車両の後続車両が基準地点を通過するまでの時間TBを算出する(S35)。
【0070】
そして、ECU50では、自車両が基準地点を通過するまでの時間TSと歩行者が自車両の進路上に到着するまでの最短時間TWとがほぼ同じか否かを判定する(S36)。S36にて時間TSと時間TWとが明らかに異なると判定した場合、ECU50では、S30の処理に戻って、法定速度での一定車速制御を継続する。
【0071】
S36にて時間TSと時間TWとがほぼ同じと判定した場合、ECU50では、対向車両の後続車両が基準地点を通過するまでの時間TBが歩行者が自車両の進路上に到着するまでの最短時間TWよりも長いか否かを判定する(S37)。S37にて時間TBが時間TW以下と判定した場合、ECU50では、S30の処理に戻って、法定速度での一定車速制御を継続する。
【0072】
S37にて時間TBが時間TWより長いと判定した場合、ECU50では、目標車速として飛び出し対応可能速度を設定し、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度になるために必要な目標減速度を算出し、その目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信する(S38)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度まで減速する。
【0073】
この車両速度制御装置3によれば、対向車両による死角が発生している場合にその対向車両と後続車両との車間距離から歩行者が飛び出せないと判断した場合及び歩行者が飛び出したとしても自車両と衝突する可能性がないと判断した場合には減速を行わないので、安全性を確保しつつ旅行時間を短縮することができる。
【0074】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0075】
例えば、本実施の形態ではオートクルーズや自動運転などの車両側で車速制御を行っている場合に適用したが、運転者がアクセル操作及びブレーキ操作を行っている場合の運転支援にも適用できる。このような運転支援では、死角に対して減速が必要な場合には介入制御(減速制御)あるいは表示や音声による注意喚起、警報などを行う。
【0076】
また、第1〜第3の実施の形態では死角に対する制御でそれぞれ異なる制御を行ったが、第1の実施の形態と第2の実施の形態は静止物体で発生する死角を対象としており、第3の実施の形態では移動物体で発生する死角を対象としているので、第1〜第3の実施の形態の各制御を組み合わせることにより、死角に対する制御としてはより好適なものとなる。
【0077】
また、本実施の形態では死角を検出するための周辺環境認識手段としてカメラ、レーダ、光ビーコン受信装置を適用したが、他の手段を適用してもよい。例えば、死角を発生させる要因となる道路構造情報を格納したデータベース、車車間通信を利用した他車両の情報を受信するための車車間通信装置がある。
【0078】
また、本実施の形態では出力先としてブレーキアクチュエータとスロットルアクチュエータに直接出力する構成としたが、ブレーキ制御ECUやエンジン制御ECUなどに出力してもよい。
【0079】
また、本実施の形態では通常走行時の目標速度を走行中の道路の法定速度としたが、運転者が設定する速度などの他の速度としてもよい。
【0080】
また、第1の実施の形態では死角に対して減速制御を行うか否かの条件及び減速制御後に加速制御を行うか否かの条件の一例を示したが、この各条件については死角の種類(どのような道路構造による死角か、他車両などの移動物体による死角かなど)に応じて補正してもよい。条件を変えることによって、死角の種類に応じて減速制御を行う必要があるのか否かを判断でき、単純に死角が存在するだけで減速制御を行なうことがなくなる。その結果、不要な減速制御がなくなり、運転者の不快感を抑制でき、車両側で車速制御している場合には旅行時間を短縮できる。
【0081】
また、第2の実施の形態では飛び出し確率に関する各種情報に基づいて飛び出し確率を推定し、飛び出し確率が閾値より大きいか否かを判定することによって死角に対して減速制御を行う否かを判断したが、飛び出し確率に関する情報を用いて直接死角に対して減速制御を行う否かを判断してもよい。例えば、各死角についてカーブミラーが設置してあるか否かを判定し、カーブミラーが設置してある死角に対してのみ減速制御を行う。
【0082】
また、第3の実施の形態では対向車両による死角が発生している場合に死角内から歩行者(移動物体)が飛び出したときの自車両との衝突の可能性の判断方法及び死角内から歩行者が飛び出すか否かの判断方法の一例を示したが、他の方法によって判断してもよい。また、第3の実施の形態では対向車両による死角が発生している場合に死角内から歩行者が飛び出したときの自車両との衝突の可能性の判断及び対向車両とその後続車両との車間距離から歩行者が飛び出すか否かを判定する構成としたが、いずれか一方の判定だけを行ってもよい。
【符号の説明】
【0083】
1,2,3…車両速度制御装置、10…車速センサ、11…カメラ、12…レーダ、13…光ビーコン受信装置、20…ブレーキアクチュエータ、21…スロットルアクチュエータ、30,40,50…ECU、31,41,51…死角検出部、32,44,52…目標速度生成部、33,45,53…目標速度追従部、42…データベース、43…死角飛び出し確率推定部。
【技術分野】
【0001】
本発明は、車両からの死角に対して安全運転支援制御を行う運転支援装置に関する。
【背景技術】
【0002】
車両が安全に走行するための様々な運転支援装置が開発されている。例えば、車両が走行しているときに建造物や駐車車両あるいは対向車両等によって発生する死角を検出し、その死角から歩行者などが飛び出してくることを仮定して安全な速度まで自車両を減速制御し、死角がなくなると加速制御する。特許文献1に記載の装置では、死角を検出すると、死角に存在する移動物体が自車両の進行上の所定の位置まで到達する時間を算出するとともに自車両がその所定の位置まで到達する時間を算出し、この各時間を比較することによって衝突の可能性を判定し、衝突の可能性の高い場合に運転支援を行う。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−230455号公報
【特許文献2】特開2009−237776号公報
【特許文献3】特開2008−171207号公報
【特許文献4】特開2009−301400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
図11に示すように、自車両MVから複数の死角B10,11を検出している場合、自車両MVが進行している各位置で衝突の可能性を判定すると、自車両MVの位置によって衝突の可能性が高い状態と低い状態を繰り返す。その結果、死角を通過するまでの安全な速度までの減速と死角通過後の加速が繰り返され、乗り心地が低下し、運転者が不快感を受ける。例えば、図12に示すように、死角B10に対して地点P10から地点P11の距離D10の区間で安全な速度まで減速し、死角B10がなくなった地点P11から加速し、再度、死角B11に対して地点P12から地点P13の距離D11の区間で安全な速度まで減速し、死角B11がなくなった地点P13から加速する。
【0005】
そこで、本発明は、複数の死角が存在する場合に安全運転支援制御を行うときの運転者に対する不快感を軽減する運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、車両からの死角に対して安全運転支援制御を行う運転支援装置であって、車両の周辺環境を認識する周辺環境認識手段と、周辺環境認識手段で認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、死角検出手段での検出結果に基づいて、第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、制御稼動手段で安全運転支援制御を稼動した後に、死角検出手段での検出結果に基づいて、第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段を備えることを特徴とする。
【0007】
この運転支援装置では、周辺環境認識手段によって車両の周辺環境を認識し、死角検出手段によってその周辺環境に基づいて車両からの死角を検出する。そして、運転支援装置では、制御稼動手段によって、死角検出手段での検出結果に基づいて第1条件を満たすか否かを判定し、第1条件を満たした場合には死角に対する安全運転支援制御(例えば、減速制御)を稼動させる。安全運転支援制御を稼動後、運転支援装置では、制御停止手段によって、死角検出手段での検出結果に基づいて第1条件とは異なる第2条件を満たすか否かを判定し、第2条件を満たさない場合には安全運転支援制御を停止させる。このように、運転支援装置では、死角に対する安全運転支援制御の稼動条件と停止条件を異なる条件とすることにより、複数の死角が存在する場合でも安全運転支援制御の稼動/停止を繰り返し行うことを抑制でき、運転者の不快感を軽減できる。
【0008】
本発明の上記運転支援装置では、死角の種類に応じて第1条件と第2条件を補正すると好適である。
【0009】
この運転支援装置では、死角の種類(例えば、どのような道路構造による死角か、他車両などの移動物体による死角か)に応じて第1条件と第2条件を補正することにより、死角の種類に応じて安全運転支援制御を行う必要があるのか否かを判断でき、不要な安全運転支援制御の稼動を抑制できる。その結果、不要な安全運転支援がなくなり、運転者の不快感を抑制でき、車両側で車速制御している場合には旅行時間を短縮できる。
【0010】
本発明の上記運転支援装置では、死角内に存在する可能性のある移動物体との衝突の可能性を判断する衝突可能性判断手段と、衝突可能性判断手段で衝突の可能性がないと判断した場合には第1条件及び第2条件による判定対象から除外する除外手段を備える構成としてもよい。
【0011】
この運転支援装置では、衝突可能性判断手段によって、死角内から移動物体が飛び出してくると仮定して衝突の可能性を判断する。そして、運転支援装置では、除外手段によって、衝突可能性判断手段で移動物体が飛び出したとしても衝突の可能性がないと判断した死角については第1条件及び第2条件による判定対象から除外し、安全運転支援制御を稼動させない。このように、運転支援装置では、死角から飛び出した移動物体との衝突可能性がない判断した場合には第1条件及び第2条件による判定を行うことなく安全運転支援制御を稼動させないので、不要な安全運転支援制御の稼動を抑制できる。その結果、不要な安全運転支援がなくなり、運転者の不快感を抑制でき、車両側で車速制御している場合には旅行時間を短縮できる。
【発明の効果】
【0012】
本発明は、死角に対する安全運転支援制御の稼動条件と停止条件を異なる条件とすることにより、複数の死角が存在する場合でも安全運転支援制御の稼動/停止を繰り返し行うことを抑制でき、運転者の不快感を軽減できる。
【図面の簡単な説明】
【0013】
【図1】第1及び第3の実施の形態に係る車両速度制御装置の構成図である。
【図2】道路構造によって複数の死角が発生する場合の一例である。
【図3】図2の複数の死角に対して第1の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【図4】第1の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【図5】第2の実施の形態に係る車両速度制御装置の構成図である。
【図6】道路構造によって複数の死角が発生する場合の他の例である。
【図7】図6の複数の死角に対して第2の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【図8】第2の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【図9】対向車両によって複数の死角が発生する場合の一例である。
【図10】第3の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【図11】道路構造によって複数の死角が発生する場合の一例である。
【図12】図11の複数の死角に対して従来の車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0015】
本実施の形態では、本発明に係る運転支援装置を、自動運転又はオートクルーズなどの車両側で速度制御を行う車両速度制御装置に適用する。本発明に係る車両速度制御装置は、通常は法定速度で走行するように一定車速制御を行い、死角を検出すると安全な速度まで減速制御を行う。本実施の形態には3つの形態があり、第1の実施の形態が複数の死角を検出した場合に全ての死角がなくなるまで安全な速度を維持する形態であり、第2の実施の形態が死角を検出した場合に死角からの飛び出しの可能性の高い死角に対してのみ安全な速度まで減速する形態であり、第3の実施の形態が対向車両による死角を検出した場合に死角から飛び出せる状況のときにのみ安全な速度まで減速する形態である。
【0016】
まず、図1〜図3を参照して、第1の実施の形態に係る車両速度制御装置1について説明する。図1は、第1及び第3の実施の形態に係る車両速度制御装置の構成図である。図2は、道路構造によって複数の死角が発生する場合の一例である。図3は、図2の複数の死角に対して第1の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【0017】
車両速度制御装置1は、複数の死角を検出している場合には最初の死角のときに安全な速度まで減速し、最後の死角がなくなるまで安全な速度を維持する。車両速度制御装置1は、車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13、ブレーキアクチュエータ20、スロットルアクチュエータ21及びECU[Electronic Control Unit]30を備えている。なお、本実施の形態では、カメラ11、レーダ12及び光ビーコン受信装置13が特許請求の範囲に記載する周辺環境認識手段に相当する。
【0018】
車速センサ10は、自車両の車速を検出するセンサである。車速センサ10では、車速を検出し、その車速を車速信号としてECU30に送信する。
【0019】
カメラ11は、自車両の周辺(少なくとも前方であり、必要に応じて側方、後方も)を撮像するカメラである。カメラ11では、自車両の周辺を撮像し、その撮像画像のデータを画像信号としてECU30に送信する。
【0020】
レーダ12は、自車両の周辺(少なくとも前方であり、必要に応じて側方、後方も)の物体を検出するためのレーダである。レーダ12としては、例えば、レーザレーダ、ミリ波レーダがある。レーダ12では、電磁波を水平面内でスキャンしながら送信し、物体に反射して戻ってくる反射波を受信し、その送受信に関する情報を検出する。そして、レーダ12では、その検出した送受信情報をレーダ信号としてECU30に送信する。
【0021】
光ビーコン受信装置13は、光ビーコンアンテナや処理装置などを備えており、光ビーコンから近赤外線によって情報を受信する受信装置である。光ビーコン受信装置13では、光ビーコンアンテナでダウンリンクエリア内で光ビーコンからの信号を受信する。光ビーコン受信装置13では、処理装置でその受信した信号を復調してインフラ情報を取り出し、そのインフラ情報をインフラ信号としてECU30に送信する。インフラ情報には、交通情報の他に、道路構造情報などの死角の発生原因となる情報を含むものとする。死角の発生原因となる情報としては、道路に面している建造物、フェンス、樹木などがある。
【0022】
ブレーキアクチュエータ20は、各車輪のホイールシリンダのブレーキ油圧を調整するアクチュエータである。ブレーキアクチュエータ20では、ECU30からのブレーキ制御信号を受信すると、ブレーキ制御信号の示される目標ブレーキ油圧に応じて作動し、ホイールシリンダのブレーキ油圧を調整する。
【0023】
スロットルアクチュエータ21は、エンジンのスロットルバルブの開度を調整するアクチュエータである。スロットルアクチュエータ21では、ECU30からのエンジン制御信号を受信すると、エンジン制御信号に示される目標開度に応じて作動し、スロットルバルブの開度を調整する。
【0024】
ECU30は、CPU[Central Processing Unit]や各種メモリ等からなり、車両速度制御装置1を統括制御する。ECU30では、メモリに格納されている各アプリケーションプログラムをロードし、CPUで実行することによって死角検出部31、目標速度生成部32、目標速度追従部33が構成される。ECU30では、車速センサ10からの車速信号、カメラ11からの画像信号、レーダ12からのレーダ信号、光ビーコン受信装置13からのインフラ信号をそれぞれ受信する。そして、ECU30では、受信したこれらの各信号に基づいて各部31、32、33での処理を行い、必要に応じてブレーキ制御信号をブレーキアクチュエータ20に送信し、エンジン制御信号をスロットルアクチュエータ21に送信する。なお、第1の実施の形態では、死角検出部31が特許請求の範囲に記載する死角検出手段に相当し、目標速度生成部32及び目標速度追従部33が特許請求の範囲に記載する制御稼動手段及び制御停止手段に相当する。
【0025】
死角検出部31では、一定時間毎に、カメラ11による画像情報、レーダ12によるレーダ情報、光ビーコン受信装置13によるインフラ情報(特に、道路構造情報)に基づいて、死角の発生要因となる物体(建造物、フェンス、樹木、駐車車両などの静止物体、走行中の他車両、歩行者などの移動物体)を検出し、検出した各物体についての情報(物体の位置、物体の大きさ(横方向の長さ、奥行き方向の長さ、高さなど)や形状、物体までの距離、物体が存在する方向、移動物体の場合には移動速度や移動方向)を取得する。そして、死角検出部31では、死角の発生要因となる物体を検出できた場合、その物体の大きさや形状などからその物体で発生する死角を検出し、その検出した死角の情報(センサレンジ内で検出できた死角の領域(位置を含む)、死角の数、死角の発生要因など)を取得する。センサレンジは、基本的にはカメラ11やレーダ12などのセンサの中で最も遠方まで検出可能なセンサの検出範囲であるが、検出性能の高いセンサの検出範囲としてもよい。図2には、センサレンジSR内で検出できた死角の一例を示しており、この例では、自車両MVの左側の建造物などによって発生した2つの死角B1,B2が存在する。なお、死角の検出方法については、従来の方法を適用する。
【0026】
目標速度生成部32では、目標速度として法定速度が設定されている場合、一定時間毎に、死角検出部31で死角が検出されているか否か(死角となる領域が存在するか否か)を判定する。死角検出部31で死角が検出されていない場合、目標速度生成部32では、目標速度として法定速度を設定し続ける。死角検出部31で死角が検出されている場合、目標速度生成部32では、目標速度として法定速度から飛び出し対応可能速度に切り替え設定する。飛び出し対応可能速度は、死角から歩行者などが飛び出してきた場合でも自車両がその手前で十分に停止可能な低速度(安全な速度)である。飛び出し対応可能速度は、自車両のブレーキ性能を考慮し、実車実験などによって設定される。
【0027】
目標速度生成部32では、目標速度として飛び出し対応可能速度が設定されている場合、一定時間毎に、死角検出部31でセンサレンジ内で死角が検出されているか否か(死角となる領域がセンサレンジ内にまだ存在するか否か)を判定する。センサレンジ内で死角が検出されていない場合(すなわち、自車両がセンサレンジ内の全ての死角を通過した場合)、目標速度生成部32では、目標速度として飛び出し対応可能速度から法定速度に切り替え設定する。一方、センサレンジ内で死角が検出されている場合(すなわち、自車両がセンサレンジ内の全ての死角を通過していない場合)、目標速度生成部32では、目標速度として飛び出し対応可能速度を設定し続ける。なお、センサレンジ内に1つの死角が検出されている場合にはその1つの死角を通過するまで飛び出し対応可能速度が維持され、センサレンジ内に複数の死角が検出されている場合にはその複数の死角を全て通過するまで飛び出し対応可能速度が維持される。
【0028】
図2の例の場合、まず、図3に示すように、自車両MVが死角B1から距離D1手前の地点P1を通過するときに目標速度が法定速度から飛び出し対応可能速度に切り替えられる。自車両MVが死角B1が死角でなくなる地点P2を通過するときには、センサレンジSR内では死角B2も検出されているので、目標速度は飛び出し対応可能速度が維持される。そして、自車両MVが死角B2が死角でなくなる地点P3を通過するときまで目標速度として飛び出し対応可能速度が維持され、地点P3を通過するときに目標速度が飛び出し対応可能速度から法定速度に切り替えられる。
【0029】
目標速度追従部33では、一定時間毎に、目標速度生成部32で設定している目標速度と車速センサ10による自車両の現在車速との差に基づいて、自車両の車速が目標車速になるために必要な目標加減速度を算出する。目標加減速度がプラス値の場合、目標速度追従部33では、目標加速度を設定し、その目標加速度となるために必要なスロットルバルブの目標開度を設定し、その目標開度をエンジン制御信号としてスロットルアクチュエータ21に送信する。目標加減速度がマイナス値の場合、目標速度追従部33では、目標減速度を設定し、その目標減速度になるために必要な各輪のホイールシリンダの目標ブレーキ油圧を設定し、その目標ブレーキ油圧をブレーキ制御信号としてブレーキアクチュエータ20に送信する。なお、目標速度追従部33では、目標速度生成部32で法定速度を維持している場合には一定車速制御となり、法定速度から飛び出し対応可能速度に切り替えた場合(安全運転支援制御が稼動)には減速制御となり、飛び出し対応可能速度を維持している場合(安全運転支援制御の稼動継続)には速度維持制御となり、飛び出し対応可能速度から法定速度に切り替えた場合(安全運転支援制御が停止)には加速制御となる。
【0030】
図1を参照して、車両速度制御装置1の動作について説明する。特に、ECU30における車両速度制御について図4のフローチャートに沿って説明する。図4は、第1の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【0031】
車速センサ10では、一定時間毎に、自車両の車速を検出し、車速信号をECU30に送信している。カメラ11では、一定時間毎に、自車両の周辺を撮像し、画像信号をECU30に送信している。レーダ12では、一定時間毎に、電磁波を水平面内でスキャンしながら送信するとともに反射波を受信し、レーダ信号をECU30に送信している。光ビーコン受信装置13では、光ビーコンからのダウンリンクエリアを自車両が走行しているときに、光ビーコンからの信号を受信し、インフラ情報を取り出して、インフラ信号をECU30に送信している。
【0032】
ECU30では、通常、一定時間毎に、目標速度を法定速度とし、法定速度と自車両の現在車速との差に基づいて自車両の車速が法定速度を維持するために必要な目標加減速度を算出し、目標加減速度に基づいて減速制御を行う場合には目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信し、加速制御を行う場合には目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S10)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、ブレーキ制御信号に応じて作動し、ホイールシリンダのブレーキ油圧を調整する。あるいは、スロットルアクチュエータ21では、エンジン制御信号を受信すると、エンジン制御信号に応じて作動し、スロットルバルブの開度を調整する。これによって、自車両は、法定速度での一定車速で走行する。
【0033】
ECU30では、一定時間毎に、画像情報、レーダ情報、インフラ情報に基づいて、死角の探索を行い、死角を探索できた場合にはその死角の情報(死角の領域、死角の数、死角の発生要因など)を取得する(S11)。ECU30では、探索結果に基づいて、死角となる領域が存在するか否かを判定する(S12)。S12にて死角となる領域が存在しないと判定した場合、ECU30では、S10の処理に戻って、法定速度での一定車速制御を継続する。なお、S12の判定では、死角となる領域が複数存在するか否かを判定してもよい。
【0034】
S12にて死角となる領域が存在すると判定した場合、ECU30では、目標車速として飛び出し対応可能速度(安全な速度)を設定し、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度になるために必要な目標減速度を算出し、その目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信する(S13)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度まで減速する。
【0035】
ECU30では、死角となる領域がセンサレンジ内にまだ存在するか否かを判定する(S14)。S14にて死角となる領域がセンサレンジ内にまだ存在すると判定した場合、ECU30では、目標車速として飛び出し対応可能速度を設定し続け、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度を維持するために必要な目標加減速度を算出し、目標加減速度に基づいて減速制御を行う場合には目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信し、加速制御を行う場合には目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S15)。ブレーキアクチュエータ20あるいはスロットルアクチュエータ21では、制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度を維持して走行する。
【0036】
S14にて死角となる領域がセンサレンジ内に存在しないと判定した場合、ECU30では、目標車速として法定速度を設定し、法定速度と自車両の現在車速との差に基づいて自車両の車速が法定速度になるために必要な目標加速度を算出し、その目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S16)。スロットルアクチュエータ21では、エンジン制御信号を受信すると、上記と同様に動作する。これによって、自車両は、法定速度まで加速する。そして、ECU30では、S10の処理に戻って、法定速度での一定車速制御を継続する。
【0037】
車両速度制御装置1によれば、センサレンジ内に複数の死角がある場合でも、一度減速したら死角がなくなるまでは減速後の安全な速度を維持することにより、減速と加速を繰り返すことがなく、乗り心地の低下を抑制でき、運転者の不快感を軽減できる。
【0038】
図5〜図7を参照して、第2の実施の形態に係る車両速度制御装置2について説明する。図5は、第2の実施の形態に係る車両速度制御装置の構成図である。図6は、道路構造によって複数の死角が発生する場合の他の例である。図7は、図6の複数の死角に対して第2の実施の形態に係る車両速度制御を行った場合の車両の位置に対する車速の変化を示す図である。
【0039】
車両速度制御装置2は、死角を検出している場合でも死角からの飛び出しの可能性のある死角に対してのみ安全な速度まで減速する。車両速度制御装置2は、車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13、ブレーキアクチュエータ20、スロットルアクチュエータ21及びECU40を備えている。車両速度制御装置2では、第1の実施の形態に係る車両速度制御装置1と比較すると、ECU40の構成だけが異なるので、ECU40についてのみ説明する。
【0040】
ECU40は、CPUや各種メモリ等からなり、車両速度制御装置2を統括制御する。ECU40では、メモリに格納されている各アプリケーションプログラムをロードし、CPUで実行することによって死角検出部41、死角飛び出し確率推定部43、目標速度生成部44、目標速度追従部45が構成され、データベース42を備えている。ECU40の死角検出部41と目標速度追従部45については、第1の実施の形態に係るECU30の死角検出部31と目標速度追従部33と同様の処理を行うので、説明を省略する。
【0041】
データベース42は、死角が発生する可能性のある領域毎に、死角からの歩行者などの移動物体の飛び出し確率に関する情報を格納したデータベースである。飛び出し確率に関する情報としては、例えば、死角領域における人通り(時間帯、曜日、天気など毎に)、死角からの飛び出しによる事故発生率(時間帯、曜日、天気など毎に)、スクールゾーンなどの標識の有無、カーブミラーの有無、道路幅がある。
【0042】
死角飛び出し確率推定部43では、死角検出部31で死角を検出している場合、検出している死角毎に、データベース42から飛び出し確率に関する情報を取得するとともに、カメラ11による画像情報、レーダ12によるレーダ情報、光ビーコン受信装置13によるインフラ情報から飛び出し確率に関する情報を取得する。そして、死角飛び出し確率推定部43では、取得した各情報に基づいて、死角からの移動物体の飛び出し確率を推定する。この推定方法としては、例えば、死角領域での人通りが多いほど、死角からの飛び出しによる事故発生率が高いほど、スクールゾーンなどの標識がある場合、カーブミラーが設置されている場合に、飛び出し確率を高くする。この推定方法については、様々な方法が適用可能である。
【0043】
図6に示す例の場合、3つの死角B3,B4,B5があり、その中の死角B4にのみカーブミラーMが設置してある。このようにカーブミラーMが設置されるのは、死角B4から道路Rに歩行者などの移動物体が出てくることが多く、安全性向上のために道路Rの走行中の車両の運転者が死角B4の状況を確認するためである。一方、死角B3,B5についてはカーブミラーが設置されていないので、普段、死角B3,B5からは道路Rに移動物体が出てくることは殆どないと考えられる。このような場合、死角B4に対して飛び出し確率を高くして減速を行い、死角B3,B5については飛び出し確率を低くして減速を行わない。
【0044】
目標速度生成部44では、目標速度として法定速度が設定されている場合、一定時間毎に、死角検出部41で死角が検出されているか否かを判定する。死角検出部41で死角が検出されていない場合、目標速度生成部44では、目標速度として法定速度を設定し続ける。死角検出部41で死角が検出されている場合、目標速度生成部44では、死角飛び出し確率推定部43で算出した飛び出し確率が閾値より大きいか否かを判定する。閾値は、飛び出し確率に基づいて死角から飛び出す可能性のあることを判定するための閾値であり、シミュレーションや実車実験などによって予め設定される。飛び出し確率が閾値より大きい場合、目標速度生成部44では、死角から移動物体が飛び出してくる可能性があると判断し、目標速度として法定速度から飛び出し対応可能速度に切り替え設定する。
【0045】
目標速度生成部44では、目標速度として飛び出し対応可能速度が設定されている場合、一定時間毎に、死角飛び出し確率推定部43で算出した飛び出し確率が閾値より大きいか否かを判定する。飛び出し確率が閾値以下の場合、目標速度生成部44では、死角から移動物体が飛び出してくる可能性がないと判断し、目標速度として飛び出し対応可能速度から法定速度に切り替え設定する。
【0046】
図6の例の場合、図7に示すように、自車両MVが最初の死角B3の手前に到達しても、目標速度として法定速度が維持される。そして、自車両MVが次の死角B4から距離D2手前の地点P4を通過するときに目標速度が法定速度から飛び出し対応可能速度に切り替えられ、自車両MVが減速する。死角B4が死角でなくなる地点P5を通過するときには目標速度が飛び出し対応可能速度から法定速度に切り替えられ、自車両MVが加速する。そして、自車両MVが最後の死角B5の手前の地点P6に到達しても、目標速度として法定速度が維持される。
【0047】
図5を参照して、車両速度制御装置2の動作について説明する。特に、ECU40における車両速度制御について図8のフローチャートに沿って説明する。図8は、第2の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【0048】
車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13については、第1の実施の形態での動作説明と同様に動作している。
【0049】
ECU40では、通常、一定時間毎に、第1の実施の形態におけるS10での処理と同様に、法定速度での一定車速制御を行う(S20)。ブレーキアクチュエータ20あるいはスロットルアクチュエータ21では、ブレーキ制御信号あるいはエンジン制御信号を受信すると、第1の実施の形態における動作説明と同様に動作する。これによって、自車両は、法定速度での一定車速で走行する。
【0050】
ECU40では、第1の実施の形態におけるS11での処理と同様に、死角領域を探索する(S21)。そして、ECU40では、死角となる領域が存在するか否かを判定する(S22)。S22にて死角となる領域が存在しないと判定した場合、ECU40では、S20の処理に戻って、法定速度での一定車速制御を継続する。
【0051】
S22にて死角となる領域が存在すると判定した場合、ECU40では、検出している死角毎に、データベース42の飛び出し確率に関する情報、カメラ11による画像情報、レーダ12によるレーダ情報、光ビーコン受信装置13によるインフラ情報に基づいて、死角からの移動物体の飛び出し確率を推定する(S23)。そして、ECU40では、死角についての飛び出し確率が閾値よりも大きいか否かを判定する(S24)。
【0052】
S24にて飛び出し確率が閾値よりも大きいと判定した場合、ECU40では、目標車速として飛び出し対応可能速度を設定し、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度になるために必要な目標減速度を算出し、その目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信する(S25)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度まで減速する。
【0053】
目標車速として飛び出し対応可能速度が設定されているときに、S24にて飛び出し確率が閾値以下と判定した場合、ECU40では、目標車速として法定速度を設定し、法定速度と自車両の現在車速との差に基づいて自車両の車速が法定速度になるために必要な目標加速度を算出し、その目標加速度になるためのエンジン制御信号をスロットルアクチュエータ21に送信する(S26)。スロットルアクチュエータ21では、エンジン制御信号を受信すると、上記と同様に動作する。これによって、自車両は、法定速度まで加速する。そして、ECU30では、S20の処理に戻って、法定速度での一定車速制御を継続する。あるいは、目標車速として法定速度が設定されているときに、S24にて飛び出し確率が閾値以下と判定した場合、ECU40では、そのままS20の処理に戻って、法定速度での一定車速制御を継続する。
【0054】
この車両速度制御装置2によれば、死角からの移動物体の飛び出し確率が高い死角についてのみ減速を行うので、安全性を確保しつつ旅行時間を短縮することができる。特に、複数の死角がある場合でも、減速が不要な死角に対して減速を行わないので、減速と加速の繰り返しを抑制でき、乗り心地の低下を抑制でき、運転者の不快感を軽減できる。
【0055】
図1及び図9を参照して、第3の実施の形態に係る車両速度制御装置3について説明する。図1は、第1及び第3の実施の形態に係る車両速度制御装置の構成図である。図9は、対向車両によって複数の死角が発生する場合の一例である。
【0056】
車両速度制御装置3は、移動物体(特に、対向車両)による死角を検出している場合にはその死角から移動物体(歩行者など)が飛び出してくる可能性があるかを判断し、移動物体が飛び出してくる可能性があると安全な速度まで減速する。車両速度制御装置3は、車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13、ブレーキアクチュエータ20、スロットルアクチュエータ21及びECU50を備えている。車両速度制御装置3では、第1の実施の形態に係る車両速度制御装置1と比較すると、ECU50の処理だけが異なるので、ECU50についてのみ説明する。なお、車両速度制御装置3は、静止物体による死角を検出している場合には第1の実施の形態に係る車両速度制御装置1又は第2の実施の形態に係る車両速度制御装置2と同様の制御を行う。
【0057】
ECU50は、CPUや各種メモリ等からなり、車両速度制御装置3を統括制御する。ECU50では、メモリに格納されている各アプリケーションプログラムをロードし、CPUで実行することによって死角検出部51、目標速度生成部52、目標速度追従部53が構成される。ECU50の死角検出部51と目標速度追従部53については、第1の実施の形態に係るECU30の死角検出部31と目標速度追従部33と同様の処理を行うので、説明を省略する。なお、第3の実施の形態では、死角検出部51が特許請求の範囲に記載する死角検出手段に相当し、目標速度生成部52及び目標速度追従部53が特許請求の範囲に記載する制御稼動手段及び制御停止手段に相当し、目標速度生成部52が特許請求の範囲に記載する衝突可能性判断手段及び除外手段に相当する。
【0058】
目標速度生成部52では、一定時間毎に、死角検出部31での検出結果に基づいて対向車両による死角が発生しているか否かを判定する。図9の例で示すように、自車両MVででは、前方から走行してくる対向車両OAによって死角B6が発生している。
【0059】
対向車両による死角が発生している場合、目標速度生成部52では、車速センサ10による自車両の現在車速VSと自車両の現在位置から基準地点までの距離LSを用いて、自車両が基準地点を通過するまでの時間TS(=LS/VS)を算出する。図9に示すように、基準地点BPは、死角B6を発生させる対向車両OAの後端部辺りの地点とする。自車両MVがこの基準地点BPを通過するまでの時間が算出される。ちなみに、歩行者が車両が走行している道路を横断する場合、歩行者は道路の端部の地点W1で待機し、対向車両OAの後端が歩行者の前を通過した直ぐ後に飛び出してゆくと考えられる。基準地点BP、距離LSについては、死角検出部51で取得している対向車両についての情報から取得できる。
【0060】
また、目標速度生成部52では、死角内に歩行者(移動物体)が存在すると仮定し、歩行者の最高速度Vmaxと死角が発生している道路の端部から自車両の進路上の地点までの距離LWを用いて、歩行者が自車両の進路上に飛び出してくまでの最短時間TW(=LW/Vmax)を算出する。図9に示す例では、歩行者が死角B6が発生している道路の端部の地点W1から自車両MVの進路上の地点W2までの距離LWを移動するための最短時間が算出される。最高速度Vmaxについては、実験などによって予め設定しておく。距離LWについては、道路構造から取得できる。
【0061】
また、目標速度生成部52では、死角を発生させる対向車両の後続車両の車速VBとその後続車両から基準地点までの距離LB(対向車両とその後続車両との車間距離に相当)を用いて、対向車両の後続車両が基準地点を通過するまでの時間TB(=LB/VB)を算出する。図9に示す例の場合、死角B6を発生させる対向車両OAの後方には車両OBが走行しており、その後続車両OBが基準地点BPを通過するまでの時間が算出される。ちなみに、歩行者が対向車両OAを通過後に道路を横断するためには、後続車両OBが基準地点BPを通過する前に地点W2まで移動しなければならない。車速VB、距離LBについては、死角検出部51で取得している対向車両の後続車両についての情報から取得できる。
【0062】
目標速度生成部52では、自車両が基準地点を通過するまでの時間TSと歩行者が自車両の進路上に飛び出してくまでの最短時間TWとがほぼ同じ時間か否かを判定する。ここでの判定では、実車実験などで設定した短時間の範囲を設け、時間TSを基準にしてその短時間範囲内に時間TWが入れば時間TSと時間TWとがほぼ同じ時間と判定する。この時間TSと時間TWとがほぼ同じであれば歩行者が死角から飛び出してきた場合に歩行者が自車両と衝突する可能性が高いと考えられ、この時間TSと時間TWとが明らかに異なっていれば歩行者が死角から飛び出してきた場合でも歩行者が横断した後に自車両が通過するかあるいは歩行者が横断する前に自車両が通過すると考えられる。そこで、時間TSと時間TWとが明らかに異なっている場合、対向車両が通過直後に死角内の歩行者が飛び出したとしても自車両と衝突する可能性がないので(自車両は減速する必要がない)、目標速度生成部52では、目標速度として法定速度を設定し続ける。
【0063】
時間TSと時間TWとがほぼ同じ場合(死角内の歩行者が飛び出したときには自車両と衝突する可能性がある場合)、目標速度生成部52では、対向車両の後続車両が基準地点を通過するまでの時間TBが歩行者が自車両の進路上に飛び出してくまでの最短時間TWより長いか否かを判定する。図9の例で示すように、対向車両OAと後続車両OBとの車間距離が短く、歩行者が地点W2まで移動する前に後続車両OBが基準地点BPを通過するような場合、歩行者は対向車両OAが通過しても飛び出さないと考えられる。一方、対向車両OAと後続車両OBとの車間距離が長く、後続車両OBが基準地点BPを通過する前に歩行者が地点W2まで移動できる場合、歩行者は対向車両OAが通過すると飛び出すと考えられる。そこで、時間TBが時間TW以下の場合、死角内に歩行者が存在したとしても飛び出さないので(自車両は減速する必要がない)、目標速度生成部52では、目標速度として法定速度を設定し続ける。一方、時間TBが時間TWより長い場合、死角内の歩行者が飛び出す可能性あるので(自車両は減速する必要がある)、目標速度生成部52では、目標速度として法定速度から飛び出し対応可能速度に切り替え設定する。
【0064】
なお、目標速度生成部52では、対向車両(移動物体)による死角に対して上記処理を行い、静止物体による死角に対しては第1の実施の形態に係る目標速度生成部32又は第2の実施の形態に係る目標速度生成部44での処理を行う。また、上記の説明では、対向車両による死角としたが、車両以外の移動物体で死角ができる場合にはその移動物体による死角についての上記処理を適用する。
【0065】
図1を参照して、車両速度制御装置3の動作について説明する。特に、ECU50における車両速度制御について図10のフローチャートに沿って説明する。図10は、第3の実施の形態に係る車両速度制御の流れを示すフローチャートである。
【0066】
車速センサ10、カメラ11、レーダ12、光ビーコン受信装置13については、第1の実施の形態での動作説明と同様に動作している。
【0067】
ECU50では、通常、一定時間毎に、第1の実施の形態におけるS10での処理と同様に、法定速度での一定車速制御を行う(S30)。ブレーキアクチュエータ20あるいはスロットルアクチュエータ21では、ブレーキ制御信号あるいはエンジン制御信号を受信すると、第1の実施の形態における動作説明と同様に動作する。これによって、自車両は、法定速度での一定車速で走行する。
【0068】
ECU50では、第1の実施の形態におけるS11での処理と同様に、死角領域を探索する(S31)。そして、ECU50では、その探索結果に基づいて、対向車両による死角が発生しているかを判定する(S32)。S32にて対向車両による死角が発生していないと判定した場合、ECU50では、S30の処理に戻って、法定速度での一定車速制御を継続する。なお、ここでは、S30の処理に戻るとしたが、ECU50では、静止物体による死角領域が存在する場合には第1の実施の形態又は第2の実施の形態で動作説明した処理に移行すればよい。
【0069】
S32にて対向車両による死角が発生していると判定した場合、ECU50では、自車両の現在車速VSと基準地点までの距離LSに基づいて自車両が基準地点を通過するまでの時間TSを算出する(S33)。また、ECU50では、死角内に歩行者が存在すると仮定し、歩行者の最高速度Vmaxと死角が発生している道路の端部から自車両の進路上の地点までの距離LWに基づいて歩行者が自車両の進路上に到着するまでの最短時間TWを算出する(S34)。また、ECU50では、死角を発生させる対向車両の後続車両の車速VBとその後続車両から基準地点までの距離LBに基づいて対向車両の後続車両が基準地点を通過するまでの時間TBを算出する(S35)。
【0070】
そして、ECU50では、自車両が基準地点を通過するまでの時間TSと歩行者が自車両の進路上に到着するまでの最短時間TWとがほぼ同じか否かを判定する(S36)。S36にて時間TSと時間TWとが明らかに異なると判定した場合、ECU50では、S30の処理に戻って、法定速度での一定車速制御を継続する。
【0071】
S36にて時間TSと時間TWとがほぼ同じと判定した場合、ECU50では、対向車両の後続車両が基準地点を通過するまでの時間TBが歩行者が自車両の進路上に到着するまでの最短時間TWよりも長いか否かを判定する(S37)。S37にて時間TBが時間TW以下と判定した場合、ECU50では、S30の処理に戻って、法定速度での一定車速制御を継続する。
【0072】
S37にて時間TBが時間TWより長いと判定した場合、ECU50では、目標車速として飛び出し対応可能速度を設定し、飛び出し対応可能速度と自車両の現在車速との差に基づいて自車両の車速が飛び出し対応可能速度になるために必要な目標減速度を算出し、その目標減速度になるためのブレーキ制御信号をブレーキアクチュエータ20に送信する(S38)。ブレーキアクチュエータ20では、ブレーキ制御信号を受信すると、上記と同様に動作する。これによって、自車両は、飛び出し対応可能速度まで減速する。
【0073】
この車両速度制御装置3によれば、対向車両による死角が発生している場合にその対向車両と後続車両との車間距離から歩行者が飛び出せないと判断した場合及び歩行者が飛び出したとしても自車両と衝突する可能性がないと判断した場合には減速を行わないので、安全性を確保しつつ旅行時間を短縮することができる。
【0074】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0075】
例えば、本実施の形態ではオートクルーズや自動運転などの車両側で車速制御を行っている場合に適用したが、運転者がアクセル操作及びブレーキ操作を行っている場合の運転支援にも適用できる。このような運転支援では、死角に対して減速が必要な場合には介入制御(減速制御)あるいは表示や音声による注意喚起、警報などを行う。
【0076】
また、第1〜第3の実施の形態では死角に対する制御でそれぞれ異なる制御を行ったが、第1の実施の形態と第2の実施の形態は静止物体で発生する死角を対象としており、第3の実施の形態では移動物体で発生する死角を対象としているので、第1〜第3の実施の形態の各制御を組み合わせることにより、死角に対する制御としてはより好適なものとなる。
【0077】
また、本実施の形態では死角を検出するための周辺環境認識手段としてカメラ、レーダ、光ビーコン受信装置を適用したが、他の手段を適用してもよい。例えば、死角を発生させる要因となる道路構造情報を格納したデータベース、車車間通信を利用した他車両の情報を受信するための車車間通信装置がある。
【0078】
また、本実施の形態では出力先としてブレーキアクチュエータとスロットルアクチュエータに直接出力する構成としたが、ブレーキ制御ECUやエンジン制御ECUなどに出力してもよい。
【0079】
また、本実施の形態では通常走行時の目標速度を走行中の道路の法定速度としたが、運転者が設定する速度などの他の速度としてもよい。
【0080】
また、第1の実施の形態では死角に対して減速制御を行うか否かの条件及び減速制御後に加速制御を行うか否かの条件の一例を示したが、この各条件については死角の種類(どのような道路構造による死角か、他車両などの移動物体による死角かなど)に応じて補正してもよい。条件を変えることによって、死角の種類に応じて減速制御を行う必要があるのか否かを判断でき、単純に死角が存在するだけで減速制御を行なうことがなくなる。その結果、不要な減速制御がなくなり、運転者の不快感を抑制でき、車両側で車速制御している場合には旅行時間を短縮できる。
【0081】
また、第2の実施の形態では飛び出し確率に関する各種情報に基づいて飛び出し確率を推定し、飛び出し確率が閾値より大きいか否かを判定することによって死角に対して減速制御を行う否かを判断したが、飛び出し確率に関する情報を用いて直接死角に対して減速制御を行う否かを判断してもよい。例えば、各死角についてカーブミラーが設置してあるか否かを判定し、カーブミラーが設置してある死角に対してのみ減速制御を行う。
【0082】
また、第3の実施の形態では対向車両による死角が発生している場合に死角内から歩行者(移動物体)が飛び出したときの自車両との衝突の可能性の判断方法及び死角内から歩行者が飛び出すか否かの判断方法の一例を示したが、他の方法によって判断してもよい。また、第3の実施の形態では対向車両による死角が発生している場合に死角内から歩行者が飛び出したときの自車両との衝突の可能性の判断及び対向車両とその後続車両との車間距離から歩行者が飛び出すか否かを判定する構成としたが、いずれか一方の判定だけを行ってもよい。
【符号の説明】
【0083】
1,2,3…車両速度制御装置、10…車速センサ、11…カメラ、12…レーダ、13…光ビーコン受信装置、20…ブレーキアクチュエータ、21…スロットルアクチュエータ、30,40,50…ECU、31,41,51…死角検出部、32,44,52…目標速度生成部、33,45,53…目標速度追従部、42…データベース、43…死角飛び出し確率推定部。
【特許請求の範囲】
【請求項1】
車両からの死角に対して安全運転支援制御を行う運転支援装置であって、
車両の周辺環境を認識する周辺環境認識手段と、
前記周辺環境認識手段で認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、
前記死角検出手段での検出結果に基づいて、第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、
前記制御稼動手段で安全運転支援制御を稼動した後に、前記死角検出手段での検出結果に基づいて、前記第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段
を備えることを特徴とする運転支援装置。
【請求項2】
死角の種類に応じて前記第1条件と前記第2条件を補正することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
死角内に存在する可能性のある移動物体との衝突の可能性を判断する衝突可能性判断手段と、
前記衝突可能性判断手段で衝突の可能性がないと判断した場合には前記第1条件及び前記第2条件による判定対象から除外する除外手段
を備えることを特徴とする請求項1又は請求項2に記載の運転支援装置。
【請求項1】
車両からの死角に対して安全運転支援制御を行う運転支援装置であって、
車両の周辺環境を認識する周辺環境認識手段と、
前記周辺環境認識手段で認識した周辺環境に基づいて車両からの死角を検出する死角検出手段と、
前記死角検出手段での検出結果に基づいて、第1条件を満たした場合に死角に対する安全運転支援制御を稼動させる制御稼動手段と、
前記制御稼動手段で安全運転支援制御を稼動した後に、前記死角検出手段での検出結果に基づいて、前記第1条件とは異なる第2条件を満たさない場合に安全運転支援制御を停止させる制御停止手段
を備えることを特徴とする運転支援装置。
【請求項2】
死角の種類に応じて前記第1条件と前記第2条件を補正することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
死角内に存在する可能性のある移動物体との衝突の可能性を判断する衝突可能性判断手段と、
前記衝突可能性判断手段で衝突の可能性がないと判断した場合には前記第1条件及び前記第2条件による判定対象から除外する除外手段
を備えることを特徴とする請求項1又は請求項2に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−194979(P2011−194979A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−62847(P2010−62847)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]