
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援装置に関し、特に車両の減速支援等に採用して有益な車両支援装置に関する。
【背景技術】
【0002】
一般に、上記車両の運転支援装置では、交差点や一時停止位置、カーブ、前方車両の接近等といった車両の減速制御が必要となる交通情報を車載カメラやナビゲーションシステムにより取得している。そして、この取得された車両周辺の交通情報に基づいて、音声による減速案内や半強制的な制動力を付与することによる減速支援を行うことにより、ドライバに対する運転支援が行われている。このような運転支援に際しては、通常、所定の走行モデルのもとで測定された一般のドライバの交通情報の認知、判断、運転操作といった各種運転行動である走行パターンを平均化した標準走行パターンが用いられる。
【0003】
ところで、交差点や一時停止位置等に向かう車両の走行パターンは、道路のカーブの曲率、道路の幅や傾斜等の道路環境によっても変化する。また、こうした車両の走行パターンは、ドライバ固有の癖によっても異なるものであり、実際に車両を運転するドライバの走行パターンに上記一般化された標準走行パターンが適合しない場合もある。このため、一般化された標準走行パターンに基づきドライバに対する運転支援を行ったとしても、必ずしもドライバの意図に沿った運転支援が行われるとは限らず、ドライバに違和感を与えることすらあった。
【0004】
そこで従来、例えば特許文献1に記載の運転支援装置では、一時停止位置等の減速地点が存在する経路毎にドライバの走行パターンを個別に記憶し、この記憶されたドライバ固有の走行パターンに基づいてドライバに対する運転支援を行うこととしている。
【0005】
また、特許文献2に記載の運転支援装置では、特定の交差点や一時停止位置、カーブといった交通情報毎にそのときの車両の走行状態とドライバによる運転操作に関する操作情報とが関連付けられたドライバ固有の運転操作記録を記録装置に適宜記録することとしている。そして、車両の走行時に取得された交通情報に近似する交通情報を上記運転操作記録から検索し、この検索された交通情報に関連付けされている走行状態及び操作情報に基づいて、ドライバに対する警報内容を決定するようにしている。
【0006】
このように、特許文献1や特許文献2に記載の運転支援装置によれば、ドライバ毎に学習された走行パターンに基づき、ドライバ固有の走行パターンが考慮された運転支援を行うことができるようになる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−297621号公報
【特許文献2】特開2008−276327号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、ドライバによる車両の運転操作とは、車両の出発地点から到着地点までの間に存在する複数の交差点やカーブ等といった連続する交通要素に対する連続した動作として行われる。そして通常、ある交差点においてブレーキ操作が遅れた場合には、この経験に基づき、次の交差点では通常よりも早いタイミングでブレーキ操作が行われる。また、
ある交差点においてブレーキ操作が早過ぎた場合には、この経験に基づき、次の交差点では通常よりも遅いタイミングでブレーキ操作が行われる。このように、車両の運転操作を行う過程でドライバが積み重ねた経験によっても、交差点や一時停止位置等の減速地点での車両の走行パターンは変化する。
【0009】
一方、上述のように、車両の運転支援が必要となる地点毎にドライバ固有の走行パターンを学習したとしても、この学習された走行パターンとはあくまで、運転支援を必要とする各地点毎に個別に学習された単発的なものでしかない。このため、例えば車両を運転する過程で、上記積み重ねた経験に基づき次の減速地点で通常よりも早め、あるいは遅めのブレーキ操作をドライバが行おうとする際に、上記個別に学習された走行パターンに基づく運転支援が行われたとしても、ドライバの意図に沿った運転支援が行われるとは限らない。
【0010】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供することにある。
【課題を解決するための手段】
【0011】
以下、上記課題を解決するための手段及びその作用効果について記載する。
請求項1に記載の発明は、走行環境情報である交通情報に基づき車両の運転を支援する運転支援装置において、前記車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習し、前記運転域での車両操作が行われる都度、そのときの交通情報に対応して次に実行すべき運転支援態様である次期運転支援態様を該当する交通情報に関連付けして学習した情報に基づき決定することを要旨とする。
【0012】
上記構成によれば、車両の運転域においてドライバによる車両の連続した運転操作が行われる過程で、交差点や一時停止位置、車両の周辺環境といった各交通情報のもとで行われる操作態様が同交通情報毎に関連付けして学習される。そして、このような学習を通じて、車両の出発地点から到着地点までの間に存在する各交通情報下でドライバが積み重ねた経験に基づき行われる一連の走行パターン(車両操作)が適宜学習されるようになる。このため、例えばある交通情報には、その交通情報に至るまでにドライバが積み重ねた経験に基づき行われた操作態様に関する情報が学習されるようになる。
【0013】
そして、上記運転域でのある交通情報のもとで車両操作が行われると、上記交通情報に関連付けて学習された情報に基づいて次期運転支援態様が決定される。すなわち、ある車両操作が行われると、その車両操作にドライバの心理が反映されているものとして、上記学習された車両操作に関する情報に基づきそのときのドライバの心理に即した運転支援態様が決定される。これにより、車両の運転操作を行う過程で変化するドライバの心理に即した運転支援を実現することができるようになる。
【0014】
請求項2に記載の発明は、請求項1に記載の運転支援装置において、前記次期運転支援態様が決定される前記運転域での車両操作が、前記該当する交通情報の直前に行われた車両操作であることを要旨とする。
【0015】
連続する交通情報のもとで行われるドライバの操作態様はドライバが積み重ねた経験に基づくものが大きく、特に直前の交通情報や同交通情報のもとで行われた車両操作に基づき行われることが多い。このため、上記構成によれば、上記対応する交通情報において直前に行われた車両操作に基づいて次に実行すべき運転支援態様が決定されることから、ドライバの心理が最も反映された車両操作に基づく次期運転支援態様の決定が可能となる。
【0016】
請求項3に記載の発明は、請求項2に記載の運転支援装置において、前記次期運転支援態様として前記該当する交通情報に関連付けして学習した操作態様に関する情報に基づき決定される操作態様が、同該当する交通情報の直前に行われた車両操作から予測される操作態様であることを要旨とする。
【0017】
例えば、ある交差点において減速操作が遅れた場合には、この経験に基づき次の交差点では通常よりも早いタイミングで減速操作が行われる。また、ある交差点において減速操作が早過ぎた場合には、この経験に基づき、次の交差点では通常よりも遅いタイミングで減速操作が行われる。さらに、ある交差点において減速操作が同交差点に適したタイミングで行われた場合には、この経験に基づき、次の交差点でも同様のタイミングで減速操作が行われる。このように、連続する交通情報下でドライバが積み重ねた経験に基づき行われる車両操作にあっては、前回行われた操作態様と次に行われる操作態様との間に一定の法則性が存在し、前回行われた操作態様との相関性が高い操作態様や相関性が低い操作態様が存在する。そこで、こうした各操作態様毎の相関性の高低等に基づいて次に行われる操作態様を予測し、この予測に基づいて次期運転支援態様を決定することとすれば、ドライバの意図に即した減速支援を高い信頼性のもとに行うことができるようになる。
【0018】
請求項4に記載の発明は、請求項2または3に記載の運転支援装置において、前記学習の要否、及び前記学習された操作態様に関する情報に基づく運転支援の要否、の少なくとも一方が、前記該当する交通情報の直前に行われた車両操作から前記該当する交通情報に至るまでの経過時間及び移動距離の少なくとも一方に基づき判断されることを要旨とする。
【0019】
連続する交通情報のもとで行われる車両操作は、前回の車両操作からの経過時間が少ないほど、また前回の車両操作からの移動距離が少ないほど、前回の車両操作の際にドライバが積み重ねた経験に基づいて行われることが多く、前回の車両操作との結びつきである相関性も自ずと高くなる。これに対し、連続する交通情報のもとで行われる車両操作であっても、ある地点で車両操作が行われてから所定時間の経過後や所定距離を走行した後に行われる車両操作は、ドライバの心理状態の変化に伴って前回の車両操作との相関性が逆に低くなる。
【0020】
このため、例えば前回の車両操作からの経過時間が所定時間以内であることや前回の車両操作からの移動距離が所定距離以内であることを条件に上記学習を行うこととすれば、ドライバ固有の連続的な走行パターンを高精度に学習することができるようになる。また同様に、前回の車両操作からの経過時間が所定時間以内であることや前回の車両操作からの移動距離が所定距離以内であることを条件に上記学習された情報に基づく運転支援を行うこととすれば、ドライバの意図に沿った運転支援を的確に行うことができるようになる。
【0021】
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載の運転支援装置において、前記学習は、前記運転支援に必要とされる要素毎に特徴量の異なる複数の操作態様に関する情報を対象として行われることを要旨とする。
【0022】
ドライバによる車両操作は、同一の交通情報下であっても、前回の車両操作態様や天候、車両の乗車人数といった各種要素に起因してその特徴量が変化する。このため、こうした各種要素に応じて特徴量が変化する操作態様毎に上記学習を行うことにより、要素毎に細分化されたドライバ固有の操作態様を学習することができるようになる。これにより、特徴量が共通する操作態様の照合を共通する要素の照合として行うことができるようになるとともに、ドライバの意図に沿った細やかな運転支援が実現されるようになる。
【0023】
請求項6に記載の発明は、請求項1〜5のいずれか一項に記載の運転支援装置において、前記学習は、前記車両の運転支援が実行されたときの車両操作の追従の有無を加味し、追従の無い車両操作が行われたときの操作態様に関する情報の影響を抑制するかたちで行われることを要旨とする。
【0024】
上記構成によるように、上記学習される操作態様として車両の運転支援が実行されたときの車両の操作態様の追従の有無を加味することとすれば、上記学習に基づく運転支援がドライバの意図に沿った運転支援であったか否かも併せて学習されるようになる。そして例えば、車両操作の追従の有無に基づいて交通情報毎に学習された操作態様を適宜修正することにより、一旦学習された操作態様に関する情報をドライバの意図が反映された情報に適宜修正することができるようになる。また、次の運転支援を決定する際には、上記学習された操作態様の照合に併せて同操作態様に対する車両操作の追従の履歴を参照することにより、ドライバの追従の有無が反映された運転支援を行うことができるようになる。このように、上記構成によれば、追従の有無の学習を通じて追従の無い車両操作が行われたときの操作態様に関する情報の影響を抑制することにより、ドライバの意図が大きく反映された学習及び運転支援を行うことができるようになる。
【0025】
請求項7に記載の発明は、請求項1〜6のいずれか一項に記載の運転支援装置において、前記交通情報毎に前記操作態様を標準化した運転支援モデルをさらに備え、前記学習は、各該当する交通情報での前記運転支援モデルと実際に行われた車両操作とのずれ量の学習として行われ、前記次期運転支援態様の決定は、この学習されたずれ量に基づく前記運転支援モデルの補正として行われることを要旨とする。
【0026】
上記構成によるように、交通情報毎に前記操作態様を標準化した運転支援モデルを備えるとともに、各該当する交通情報での運転支援モデルと実際に行われた車両操作とのずれ量の学習として上記学習を行うこととすれば、既存の運転支援モデルを補正することのみによってドライバ固有の走行パターンに即した運転支援を行うことができるようになる。これにより、上記運転支援装置としての汎用性が高められるようになるとともに、上記運転支援にかかるデータ量の低減が図られるようになる。
【0027】
またこの発明は、ドライバ固有の走行パターンが上記運転支援モデルに近似する走行パターンであるときに特に有効であり、この場合には、必要最小限のずれ量の学習による運転支援を行うことができるようになる。
【0028】
請求項8に記載の発明は、請求項1〜6のいずれか一項に記載の運転支援装置において、前記交通情報毎に前記操作態様を標準化した運転支援モデルと、前記車両の運転支援が実行されたときの車両操作の追従態様に基づいて前記学習された情報の信頼性を判断する判断手段とをさらに備え、前記学習は、前記各交通情報下で検出された操作態様そのものを交通情報毎に関連付ける態様で行われ、前記次期運転支援態様の決定は、各該当する交通情報での前記判断手段により信頼性が維持されている旨判断されている操作態様と前記運転支援モデルとのいずれかの選択として行われることを要旨とする。
【0029】
上記構成によれば、標準化された運転支援モデルと別途に、ドライバの操作態様に基づき学習された走行モデルが構築される。そして、次期運転支援態様の決定に際しては、例えば該当する交通情報に学習されている操作態様に関する情報の信頼性が上記判断手段により高いと判断されていれば、その操作態様に基づき次期運転支援態様が決定される。同様に、操作態様に関する情報の信頼性が上記判断手段により低いと判断されていれば、標準化された運転支援モデルに基づき次期運転支援態様が決定される。このように上記構成によれば、判断手段の判断を通じてより信頼性の高い運転支援を行うことができるように
なる。
【0030】
請求項9に記載の発明は、請求項1〜8のいずれか一項に記載の運転支援装置において、前記学習される操作態様に関する情報は、前記各交通情報下での車両の減速操作に関する情報であり、前記次期運転支援態様の決定は、当該車両の減速操作に基づく車両の減速支援タイミングの決定として行われることを要旨とする。
【0031】
上記運転支援は、車両が交差点や一時停止位置等に差し掛かる際の減速操作時に特に必要とされ、ドライバ固有の癖も車両操作に反映されやすい。この点、上記構成によれば、例えばドライバに対する警告や半強制的な制動力の付与等の減速支援が行われるタイミングを上記学習に基づき決定することにより、ドライバの意図に即した減速支援を行うことができるようになる。
【0032】
請求項10に記載の発明は、請求項9に記載の運転支援装置において、前記次期運転支援態様として決定される前記車両の減速支援タイミングは、前記該当する交通情報の直前に行われた車両の減速操作のタイミングと相反するタイミングに設定されることを要旨とする。
【0033】
通常、ある交差点において減速操作が遅れた場合には、この経験に基づき次の交差点では通常よりも早いタイミングで減速操作が行われる。また、ある交差点において減速操作が早過ぎた場合には、この経験に基づき、次の交差点では通常よりも遅いタイミングで減速操作が行われる。このように、連続する交通情報下で行われる減速操作は通常、前回の減速操作の際の経験に基づき、次の減速操作では前回の減速操作と相反するタイミングにて行われる。このため、上記構成によれば、こうした推測のもとに上記減速支援タイミングを決定することにより、ドライバの意図に即した減速支援を容易に行うことができるようになる。
【0034】
請求項11に記載の発明は、請求項1〜10のいずれか一項に記載の運転支援装置において、前記交通情報は、車載用のカーナビゲーションシステム、及び車載カメラ、及び車両間通信システム、及び路車間通信システムの少なくとも1つを通じて取得されることを要旨とする。
【0035】
上記交通情報とは、例えば交差点や一時停止位置、カーブ等があり、この種の情報は通常、上記カーナビゲーションシステムを通じて取得可能である。このため、上記構成によれば、交通情報の取得とこの取得された交通情報に基づき上記運転支援とを1つのカーナビゲーションシステムによって行うことができるようになる。また、車載カメラや車両間通信システムにより上記交通情報を取得することとすれば、実際に車両が走行している交通情報を高い精度のもとに取得することができるようになる。
【図面の簡単な説明】
【0036】
【図1】本発明の運転支援装置の第1の実施の形態について、その構成を示すブロック図。
【図2】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、同交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図3】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、連続する交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図4】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、連続する交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図5】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、連続する交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図6】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、減速支援タイミングの選択態様の一例を示すグラフ。
【図7】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、減速支援タイミングの選択態様の一例を示すグラフ。
【図8】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、減速支援タイミングの選択態様の一例を示すグラフ。
【図9】同実施の形態の運転支援装置による運転支援手順を示すフローチャート。
【図10】同実施の形態の運転支援装置による学習処理を示すフローチャート。
【図11】同実施の形態の運転支援装置による通知処理を示すフローチャート。
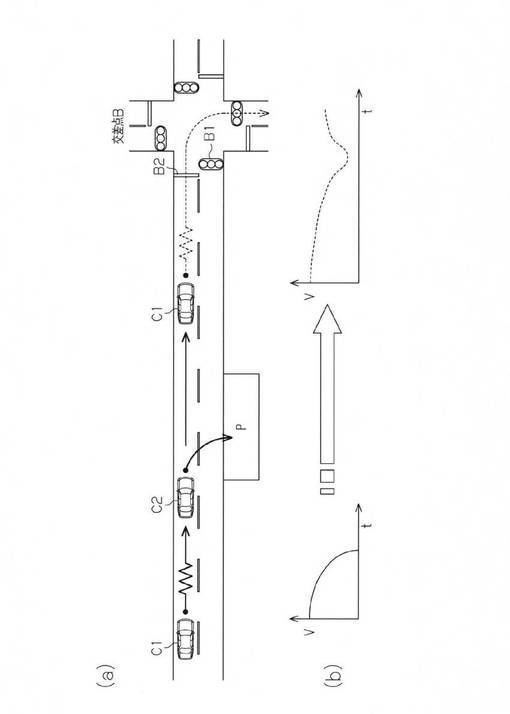
【図12】本発明の運転支援装置の第2の実施の形態について、(a)は、交通情報としての交差点及び前方車両と自車両との関係を示す図。(b)は、交差点のもとで行われた減速操作の推移例を示すグラフ。
【図13】同実施の形態の運転支援装置による学習処理を示すフローチャート。
【図14】同実施の形態の運転支援装置による通知処理を示すフローチャート。
【図15】同実施の形態の運転支援装置による通知処理を示すフローチャート。
【図16】本発明の運転支援装置の他の実施の形態について、その構成を示すブロック図。
【発明を実施するための形態】
【0037】
(第1の実施の形態)
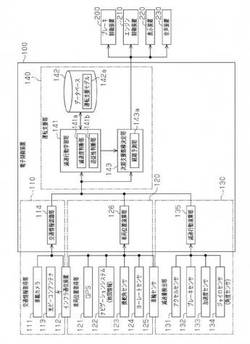
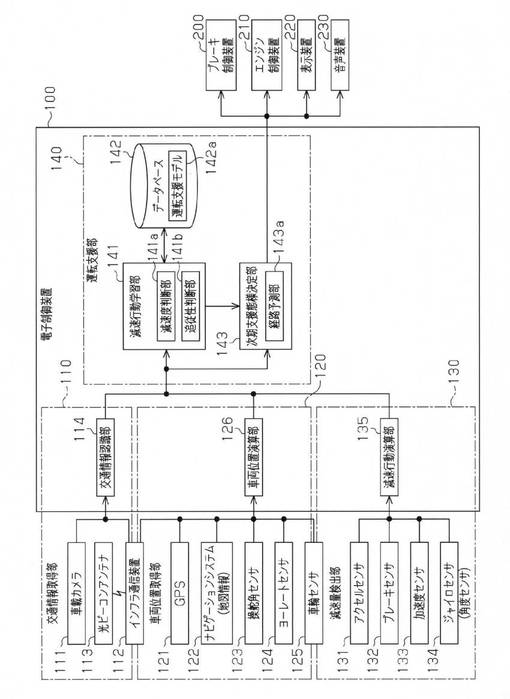
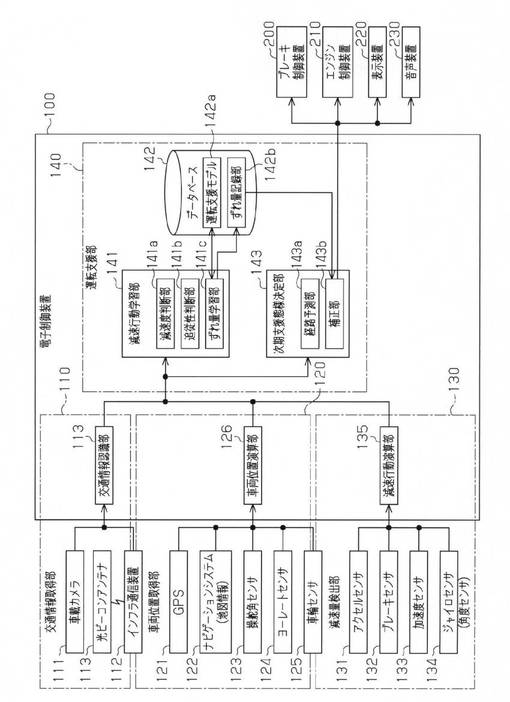
以下、本発明にかかる運転支援装置を具体化した第1の実施の形態について図1〜図11を参照して説明する。なお、本実施の形態の運転支援装置は、車両に搭載されて同車両の運転を操作するドライバの運転支援に用いられる装置である。図1に、本実施の形態の運転支援装置の概略構成を示す。
【0038】
図1に示すように、運転支援装置100は、それぞれ各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。この運転支援装置100では、現在地からドライバにより設定された目的地に到着するまでの間、ドライバの運転操作を支援するために運転支援に応じて必要とされる減速停止支援信号などの各種信号を生成するようになっている。
【0039】
この運転支援装置100は、走行環境情報である交通情報としての交差点、同交差点に設けられた信号機、カーブ、前方車両や、天候等の周辺環境等に関する情報を取得する交通情報取得部110を備えている。この交通情報取得部110は、車両に搭載されて車両の周辺環境を撮像する車載カメラ111を備えている。車載カメラ111は、ルームミラーの裏側に設置された光学式のCCDカメラなどにより車両前方の所定範囲を撮像するとともに、撮像された撮像画像に基づく画像信号を交通情報認識部114に送信する。この交通情報認識部114は、車載カメラ111により撮像された画像信号に基づいて、前方の信号の状態(信号の灯色等)や前方の他車両の状態(車両のテールランプの点灯等)を抽出する。この抽出された前方の信号の状態や前方の他車両の状態に関する情報は、車両を運転するドライバに対する運転支援態様を決定する運転支援部140に送信される。そして、抽出された前方の信号の状態や前方の他車両の状態に基づいて車両が停止すべき状況であるか否かを判定して、停止すべき状況であると判定された場合、車両を停止させる運転支援が運転支援部140により行われる。
【0040】
インフラ通信装置112は、赤外線などの光信号により道路に設けられる光ビーコンアンテナ113と通信を行う通信装置である。この光ビーコンアンテナ113は、例えば信号機が設けられた交差点の手前数百メートルの位置に設置されている。光ビーコンアンテナ113は、交差点までの距離や交差点に設けられた信号機の信号サイクルや道路線形等
の情報をインフラ情報信号として送信する。そして、インフラ通信装置112は、光ビーコンアンテナ113から送信されるインフラ情報信号を受信するとともに、この受信したインフラ情報信号を上記交通情報認識部114と車両の位置に関する情報の演算が行われる車両位置演算部126とに送信する。またインフラ情報信号には、光ビーコンアンテナ113が設けられている道路の道路状況(交差点形状、曲率、勾配、車線数を含む)などこの道路に付随した付随情報や、地上設備等により検出された交差点周辺の他車両などの移動体情報も含まれる。
【0041】
また、インフラ通信装置112は、光ビーコンアンテナ113を介して、VICS(Vehicle Information and Communication System)センタから配信される道路交通情報を受信する。この道路交通情報には、例えば、渋滞区間、渋滞度等の渋滞情報、通行止め等の通行規制情報等が含まれる。
【0042】
こうして交通情報認識部114では、車載カメラ111やインフラ通信装置112によって取得された情報に基づき、車両前方の信号機の灯色の認識等といった車両の周辺環境の認識が行われる。
【0043】
また、運転支援装置100は、車両の位置情報を取得する車両位置取得部120を備えている。この車両位置取得部120は、GPS121及びカーナビゲーションシステム122や操舵角センサ123、ヨーレートセンサ124、車速センサ125などの各種センサによって構成されている。
【0044】
GPS121は、車両の絶対位置を検出するためのGPS衛星信号を受信するとともに、受信されたGPS衛星信号に基づき車両の位置を検出する。こうして、検出された車両の位置情報が上記車両位置演算部126に送信される。また、カーナビゲーションシステム122には車両の運転域に対応する道路地図データが登録されており、この道路地図データが車両位置演算部126に送信される。この道路地図データは、地図に関する情報であり、地図表示用データ、経路探索用データ、誘導データ(交差点名称・道路名称・方面名称・方向ガイド施設情報など)などから構成される。地図表示用データは、道路や道路地図の背景を表示するためのデータである。経路探索用データは、道路形状とは直接関係しない分岐情報などから成るデータであり、主に推奨経路を演算(経路探索)する際に用いられる。誘導データは、交差点の名称などから成るデータであり、演算された推奨経路に基づき運転者などに推奨経路を誘導する際に用いられる。また、道路地図データには、道路の形状、道路における交差点や横断歩道の情報などの道路付属情報が含まれている。具体的には、道路付属情報として、信号機が設けられた交差点の位置、一時停止位置、踏切、道路の道路形状、トンネル、横断歩道、事故多発地点、路面状態などの情報が含まれる。
【0045】
操舵角センサ123は、検出されたステアリングの操舵角の変化量に基づいて操舵角を算出するとともに、この算出された操舵角に応じた信号を車両位置演算部126に送信する。また、車速センサ125は、車輪の回転速度を検出するとともに、この検出された回転速度に応じた信号を車両位置演算部126に送信する。そして、ヨーレートセンサ124は、車両の旋回方向への回転角の変化する速度であるヨーレートを検出するとともに、この検出されたヨーレートに応じた信号を車両位置演算部126に送信する。
【0046】
こうして、車両位置演算部126では、インフラ通信装置112、GPS121、カーナビゲーションシステム122、操舵角センサ123、ヨーレートセンサ124、及び車速センサ125から送信された情報に基づき、自律慣性航法等の演算を通じて車両の位置情報が求められる。そして、この求められた車両の位置情報も、上記運転支援部140に送信される。
【0047】
また一方、運転支援装置100は、車両の減速量を検出する減速量検出部130を備えている。この減速量検出部130は、アクセルセンサ131、ブレーキセンサ132、加速度センサ(Gセンサ)133、及びジャイロセンサ134などの各種センサによって構成される。それら各センサ131〜134は、各センサ131〜134の検出結果に基づき車両の減速操作を数値化する減速行動演算部135に電気的に接続されている。
【0048】
アクセルセンサ131は、ドライバによるアクセルペダルの操作によって変化するアクセルの開度を検出するとともに、この検出されたアクセルの開度に応じた信号を減速行動演算部135に送信する。ブレーキセンサ132は、ドライバによるブレーキペダルの操作の有無を検出するとともに、この検出された操作の有無に応じた信号を減速行動演算部135に送信する。加速度センサ133は、車両の加速度を検出するとともに、この検出された加速度に応じた信号を減速行動演算部135に送信する。ジャイロセンサ134は、車両進行方向を検出するとともに、この検出された進行方向に応じた信号を減速行動演算部135に送信する。そして、減速行動演算部135では、各センサ131〜134から送信された情報に基づいて、ドライバにより行われた車両の減速操作が数値化される。こうして数値化された車両の減速操作に関する情報もまた、上記運転支援部140に送信される。
【0049】
なお、上記各種信号は、それぞれ所定の周期で運転支援装置100に送信されるようになっており、上記交通情報取得部110、車両位置取得部120、減速量検出部130は、上記伝達される各種信号に基づいて車両の位置、速度、方向等の現在状況を逐次算出することができるようになっている。
【0050】
一方、運転支援装置100には、車両のブレーキの制御等を行うブレーキ制御装置200と、車両のエンジンの制御等を行うエンジン制御装置210とが、CAN(Control Area Network)などの車載ネットワークを介してそれぞれ通信可能に接続されている。なお上記ブレーキ制御装置200及びエンジン制御装置210は、上記運転支援装置100と同様に、それぞれ各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。
【0051】
ブレーキ制御装置200は、各種センサからの信号に基づいて車両のブレーキ装置の制御を通じて当該車両に制動力を発生させる。具体的には、車速センサ125からの信号に基づいて把握される車両の速度、ブレーキセンサ132からの信号等に基づいて要求される制動力を算出してブレーキ装置を制御する。
【0052】
エンジン制御装置210は、車両のエンジンの運転制御を行う装置であって、アクセル踏込量を検出するアクセルセンサ131や吸入空気量を検出するセンサ等が接続されるとともに、スロットルバルブの駆動回路、燃料噴射弁の駆動回路等の各種機器の駆動回路が接続されている。そして、エンジン制御装置210は、上記各センサから入力した検出信号に基づいて把握されるエンジンの運転状態等を検知するとともに、上記各種機器の駆動回路の指令信号を出力する。こうしてエンジンの運転制御がエンジン制御装置210を通じて実施される。
【0053】
また、表示装置220は、例えば液晶ディスプレイによって構成され、車室内のセンターコンソール付近に設置される。この表示装置220には、運転支援装置100から地図表示の画像データが入力されたり、ドライバに対して注意を喚起するために運転支援装置100から出力された警告表示の画像データ等が入力され、各画像データに対応した画像
が表示される。例えば、運転支援装置100は、自車両の現在位置とその周辺の地図とを組み合わせた画像データを出力して、自車両の位置とその周辺の地図とが組み合わされた画像を表示装置に表示させる。このような構成により、表示装置220には、自車両の位置を表す自車位置マークや経路情報及び誘導情報などが道路地図とともに表示される。また、表示装置220は、VICSにより受信した交通情報、方向指示入力装置(方向指示器)及びステアリングの操舵角センサからの情報に基づいて、自車輌の進行路を判定し、進行路に関する交通規制情報を表示する。また、運転支援装置100には、運転支援にかかる警報などの各種情報を出力するための出力装置として音声装置230が電気的に接続されていている。この音声装置230では、運転支援装置100から送信される信号に基づいて、ドライバへの注意喚起や音声案内が行われる。
【0054】
そして、こうした各種装置に接続される運転支援装置100では、上記交通情報認識部114、車両位置演算部126、減速行動演算部135によって取得された交通情報、車両の位置情報、車両の減速量に関する情報が上記運転支援部140に取り込まれる。
【0055】
この運転支援部140に取り込まれた各情報は、それら各情報に基づきドライバ固有の操作態様を学習する減速行動学習部141に入力される。この減速行動学習部141では、交差点等の交通情報に応じてドライバが減速操作を行う地点、及び同地点でのアクセルオフ、ブレーキオン/オフといった減速操作、及び減速度等に関する情報の学習が行われる。なお本実施の形態では、運転支援に必要とされる要素として、車両の減速、停止が必要とされる地点においてドライバによる減速操作が開始されるタイミングが学習される。
【0056】
ドライバが減速操作を行う地点としては、例えば一時停止交差点、信号交差点、踏切、「右折あり」や「左折あり」等の警戒標識が設置される曲率半径の小さなカーブ等がある。そして、それら減速操作が行われる地点は、上述のカーナビゲーションシステム122の道路地図データやインフラ通信装置112にて取得される道路線形等の情報に予め記録されている。
【0057】
こうして減速行動学習部141は、ドライバにより過去に設定された目的地や曜日、時間帯に応じたドライバの行動パターン(走行パターン)を対応する交通情報毎に学習し、この学習した学習値を適宜データベース142に記録する。減速行動学習部141はまた、ドライバにより行われる通常の減速度を学習し、ドライバにより行われた減速操作が急減速であったか否かを判断する減速度判断部141aを備えている。また減速行動学習部141は、運転支援装置100による運転支援が実行されたときに追従する車両操作が行われたか否かを判断する追従性判断部141bを備えている。そして、それら減速度判断部141a及び追従性判断部141bによる判断結果も減速行動学習部141による学習値と併せてデータベース142に蓄積される。また本実施の形態では、データベース142は、一般のドライバの走行パターンに基づき交通情報毎に標準化された車両操作に関する情報が登録されている運転支援モデル142aを備えている。
【0058】
一方、上記交通情報認識部114、車両位置演算部126、減速行動演算部135によって取得された交通情報、車両の位置情報、車両の減速量に関する情報は、車両に対して次に行うべき運転支援態様である次期運転支援態様を決定する次期支援態様決定部143にも取り込まれる。この次期支援態様決定部143では、車両の減速操作が行われる際に、上記各装置200〜230を介した予備制動による車両の減速支援を行うタイミングが決定される。また、この次期支援態様決定部143では、減速支援タイミングの決定に際し、データベース142に学習されている交通情報毎の減速操作に関する情報の信頼性が判断され、信頼性が維持されている旨判断された情報に基づく減速支援タイミングの決定が行われる。すなわち本実施の形態では、この次期支援態様決定部143が車両操作に関する情報の学習値の信頼性を判断する判断手段として機能する。なお、信頼性が高い減速
操作に関する情報としては、例えば上記減速行動学習部141により学習され、データベース142に記録された回数が多い情報や、連続する交通情報のもとで行われた減速操作に関する情報同士の相関性(結び付き)が高い情報などが含まれる。またこの他、上記追従性判断部141bによる判断結果に基づき、運転支援装置100による運転支援が実行されたときのドライバによる追従の有無によっても、データベース142に記録する減速操作に関する情報の信頼性を判断することもできる。なお、本実施の形態では、こうした次期支援態様決定部143による信頼性の判断を通じて減速行動学習部141に学習された減速操作に関する情報の信頼性が低いと判断された場合には、上記運転支援モデル142aに予め登録されている標準化された通常の減速パターンに基づく減速支援が行われる。
【0059】
また、こうした次期支援態様決定部143は、上記データベース142に記録されたドライバの行動パターンに基づき現在地から目的地までに至るまでにドライバが走行する経路を予測する経路予測部143aを備えている。この経路予測部143aは、データベース142に記憶された車両の走行開始及び走行終了の位置や時間帯、走行経路等の情報から、その車両の類型的な走行パターンを抽出することができるようになっている。これにより、日頃から同じ走行経路を通って繰り返される走行パターンについては、エンジンの始動時の状況から、その後の走行経路を予測することができるようになっている。
【0060】
そして、こうした次期支援態様決定部143により減速支援タイミングが決定されると、このタイミングに基づく運転支援が上記ブレーキ制御装置200、エンジン制御装置210、音声装置230、表示装置220を介して実行される。この減速支援としては、例えば車両の進行方向前方に存在する交差点の手前でブレーキ制御装置200やエンジン制御装置210による予備制動を行う制御、表示装置220による視覚的な減速案内、音声装置230による音声案内等が行われる。また、上記経路予測部143aによって予測された予測結果に基づいて、現在地から目的地に至るまでの推奨経路の案内等が音声装置230や表示装置220を介して行われる。
【0061】
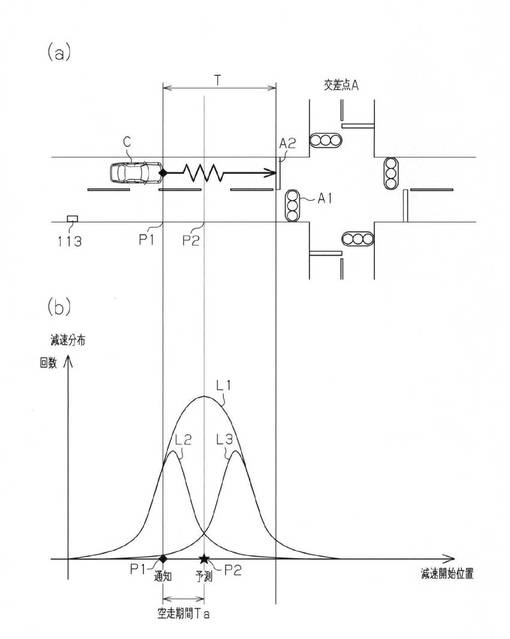
次に、このような運転支援装置100によって実行される車両操作の学習態様について図2〜図5を参照して説明する。なお、図2(a)は、交通情報としての交差点と車両との関係を示したものであり、図2(b)は、この交差点のもとで行われた減速操作の分布の一例を示したものである。
【0062】
図2(a)に示すように、自車両Cが、信号機A1を有する交差点Aに向って進行しているとする。なお、信号機A1には、インフラ装置を介して当該信号機A1の状態を通知する機能が設けられており、例えば同信号機A1の位置や信号サイクルが信号機A1の手前に設けられた光ビーコンアンテナ113により送信されている。これにより、車両Cは、インフラ通信装置112を介して信号機A1の状態を事前に把握することができるようになっている。なお、信号機にインフラ装置を介して通知する機能が設けられていない場合であっても、上記車載カメラ111などにより信号機A1の状態が認識される。
【0063】
そして、運転支援装置100による通常のタイミングによる減速支援では、前方の交差点Aの信号機A1が例えば赤現示とされていると、交差点Aの停止線A2から距離Tだけ手前の地点P1を車両Cが通過するタイミングで上記表示装置220や音声装置230を介してドライバに減速を促す案内が通知される。また、信号機A1が青現示であってもドライバが交差点Aで右折/左折しようとしているとき、すなわち交差点Aでの減速が必要になる際にも同様にドライバに対する減速案内が通知される。
【0064】
こうして、表示装置220や音声装置230を介した減速案内に追従する態様でアクセルオフやブレーキオンなどの減速操作がドライバにより実行される。そして、このドライ
バにあっては、図2(b)に特性L1として示すように、地点P1で減速案内が通知された場合、通常、空走期間Ta経過後に地点P2で減速操作が開始されることが最も多くなる。このような減速分布から、交差点Aにおいて信号機A1の手前の地点P1で減速支援が行われた場合には、上記空走期間Taを経て地点P2で減速操作が開始されると予測することができる。よって、このドライバに対する交差点Aでの減速支援は、車両Cが地点P1を通過するタイミングで実行することが好ましいと推定できる。なお、この図2(b)に特性L1として示した減速操作は、一般のドライバによって行われる標準的な減速操作を示すものでもあり、本実施の形態では、上記運転支援モデル142aに予め登録されている。また、上記空走期間Taも上記運転支援モデル142aに予め登録されている値であり、ドライバに減速案内が通知されてからドライバによる減速操作が行われるまでの一般的な反応速度を示す値である。
【0065】
ところで、こうしたドライバの減速操作による減速分布は1つではなく、図2(b)に特性L2及びL3として示すように、交差点Aに至るまでにドライバが積み重ねた経験、換言すれば、ドライバの心理状態によっても交差点(交通情報)に対する減速操作の分布形状である特徴量が変化する。すなわち、ドライバの減速分布は、交通環境、時間帯、天候等の各要素に起因して変化する傾向が強く、ドライバによる車両操作にはこうした各要素の影響が反映される。このため、地点P1にてドライバに対する減速案内を例えば特性L1に基づき一様に行ったとしても、ドライバの心理状態によっては減速支援が遅過ぎる、あるいは早過ぎると感じることもある。また、このような減速分布の特徴量はドライバ固有の癖によって変化することが多く、その都度変化するドライバ固有の癖に即した運転支援を行うことは困難である。
【0066】
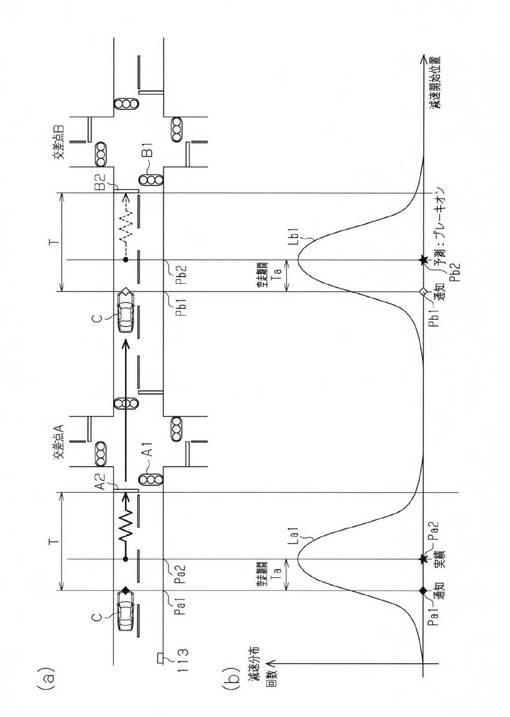
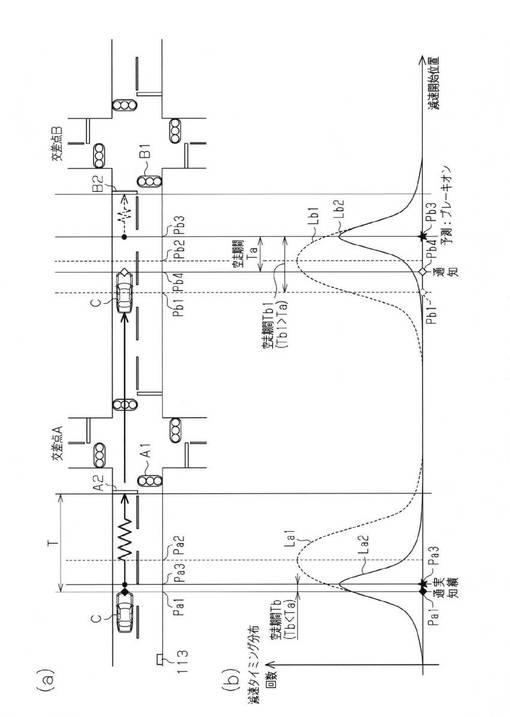
そこで本実施の形態では、車両Cの運転域でドライバが積み重ねた経験に基づいた車両操作の学習を通じて、ドライバの意図を反映した運転支援を行うこととする。図3〜図5に、上記減速行動学習部141により学習されたドライバの減速操作の一例を示す。なお、図3(a)〜図5(a)は、車両Cとその運転域に存在する交通情報としての交差点との関係を模式的に示したものであり、図3(b)〜図5(b)は、各交差点のもとで行われた特徴量の異なる減速操作の分布の一例を示したものである。
【0067】
ここで、図3(a)に示すように、車両Cが、信号機A1を有する交差点Aとその交差点Aの先に連続する信号機B1を有する交差点Bとが進行方向に順に並ぶ道路を、交差点Aに向って進行しているとする。
【0068】
そして本実施の形態では、車両Cが連続する交差点A及びBを走行する際には、上記減速行動学習部141により、交通情報としての交差点Aにて行われた車両操作(減速操作)が交差点Aに関連付けて学習される。次いで、交差点Aにて車両操作が行われた際にドライバが積み重ねた経験が反映された車両操作として、交差点Aを通過した車両Cが交差点Bを通過したときに行われた車両操作が交差点Bに関連付けて学習される。
【0069】
そして、交差点Aに向かう車両Cのドライバに対して停止線A2よりも距離Tだけ手前の地点Pa1で減速案内が通知されたときの交差点Aにおける減速分布は、図3(b)に特性La1として示すように、減速操作の最多開始位置が地点Pa2となっている。また、後続する交差点Bにおいても、図3(b)に特性Lb1として示すように、信号機B1に対応する停止線B2よりも距離Tだけ手前の地点Pb1で減速案内が通知された場合、この減速案内に追従する減速操作の最多開始位置が上記地点Pa1に対応する地点Pb2となっている。
【0070】
すなわち、交差点Aにて行われた減速操作が通常のタイミングであり、ドライバにとって好ましい減速操作が行われたことから、後続する交差点Bにおいても特性La1と同様
の推移のもとに減速操作が行われている。こうしたことから、交差点Aにおいて通常の減速操作が行われた場合には、後続する交差点Bにおいても通常の減速操作が行われる傾向が強い、換言すれば、連続する交差点で行われる通常の減速操作同士の相関性が高いことが理解できる。そして、上記減速行動学習部141では、連続する交差点A及びBで行われる通常のタイミングによる減速操作同士の相関性が高いものとして、それら減速操作に関する情報が紐付けされる。なお、相関性が高い減速操作としては、連続する減速操作として紐付けされた回数が多い減速操作や、上記追従性判断部141bによる判断結果に基づき減速案内に追従したと判断された回数が多い減速操作、あるいは減速案内に追従しなかったと判断された回数が少ない減速操作が含まれる。また、相関性が低い減速操作としては、連続する減速操作として紐付けされた回数が少なく紐付けが不十分な減速操作や、上記追従性判断部141bによる判断結果に基づき減速案内に追従しなかったと判断された回数の多い減速操作が含まれる。
【0071】
そこで、上記次期支援態様決定部143では、交差点Aにて車両Cが地点Pa1で通知された減速案内に追従する減速操作が地点Pa2付近で開始された場合は、交差点Bにおける地点Pb2から上記空走期間Taを逆算した地点、ここでの例では地点Pb1に車両Cが到達するタイミングを交差点Bにて減速支援を行うべきタイミングとして決定する。
【0072】
次に、交差点A及びBにおいて学習された減速分布のうち、先の特性La1及びLb1とは特徴量が異なる減速分布を図4及び図5に示す。
すなわちここでの例では、図4(a)に示すように、通常の減速タイミングにより地点Pa1にてドライバに対する減速案内が通知されたとしても、図4(b)に特性La2として示すように、地点Pa1から先の空走期間Taよりも短い空走期間Tbが経過した地点Pa3で減速操作が開始される頻度が高くなっている。そしてドライバは、例えば交差点Aでの減速操作が早過ぎたという経験を積み重ねる。
【0073】
そして、こうした経験に基づきドライバは、図4(a)に示すように、後続する交差点Bでは通常よりも遅いタイミング、ここでの例では地点Pb3を通過するタイミングで、きつめのブレーキによる減速操作を開始するようになる。このため、交差点Bにおける減速分布(減速タイミング)は、図4(b)に特性Lb2として示すように、交差点Aにおける特性La2とは相反する推移(タイミング)となる。こうしたことから、交差点Aにおいて通常よりも早いタイミングで減速操作が行われた場合には、後続する交差点Bにおいては通常の減速操作よりも遅いタイミングで減速操作が行われる傾向が強い、換言すれば、それら連続する交通情報下で行われる減速操作の相関性が高いことが理解できる。そして、上記減速行動学習部141では、連続する交差点A及びBで行われる通常よりも早いタイミングによる減速操作と通常よりも遅いタイミングによる減速操作との相関性が高いものとして、それら減速操作に関する情報が紐付けされる。
【0074】
そしてこの場合には、交差点Bにて通常のタイミング(地点Pb1)で減速案内を通知したとしても、車両Cがこの地点Pb1から減速開始位置Pb3に到達する間での期間Tb1が上記空走期間Taよりも長く、そのときのドライバにとっては減速案内が通知されるタイミングが早過ぎるように感じられる。
【0075】
そこで、本実施の形態では、交差点Aにて減速操作が通常よりも早いタイミングで行われた場合には、後続する交差点Bでは、この交差点Bに関連付けて学習された減速分布に基づき、交差点Bにおける地点Pb3から上記空走期間Taを逆算した地点Pb4に車両Cが到達するタイミングを交差点Bにて減速支援を行うべきタイミングとして決定する。
【0076】
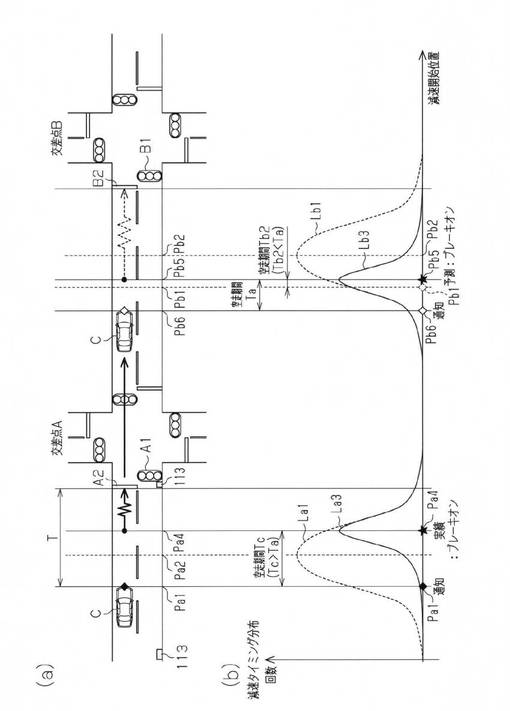
一方、図5(a)に示すように、通常の減速タイミングにより地点Pa1にてドライバに対する減速案内が通知されたとしても、図5(b)に特性La3として示すように、地
点Pa1から上記空走期間Taよりも長い空走期間Tcが経過した地点Pa4で減速操作が開始される頻度が高くなっている。そしてドライバは、例えば交差点Aでの減速操作が遅過ぎたという経験を積み重ねる。
【0077】
そして、こうした経験に基づきドライバは、図5(a)に示すように、後続する交差点Bでは通常よりも早いタイミング、ここでの例では地点Pb5を通過するタイミングで緩やかな減速操作を開始するようになる。このため、交差点Bにおける減速分布(減速タイミング)は、図5(b)に特性Lb3として示すように、交差点Aにおける特性La3とは相反する推移(タイミング)となる。こうしたことから、交差点Aにおいて通常よりも遅いタイミングで減速操作が行われた場合には後続する交差点Bにおいては通常の減速操作よりも早いタイミングで減速操作が行われる傾向が強い、換言すれば、それら連続する交通情報下で行われる減速操作の相関性が高いことが理解できる。そして、上記減速行動学習部141では、連続する交差点A及びBで行われる通常よりも遅いタイミングによる減速操作と通常よりも早いタイミングによる減速操作との相関性が高いものとして、それら減速操作に関する情報が紐付けされる。
【0078】
そしてこの場合には、交差点Bにて通常のタイミング(地点Pb1)で減速案内を通知したとしても、車両Cがこの地点Pb1から減速開始位置Pb5に到達する間での期間Tb2が上記空走期間Taよりも短く、そのときのドライバにとっては減速案内が通知されるタイミングが遅過ぎるように感じられる。
【0079】
そこで、本実施の形態では、交差点Aにて減速操作が通常よりも遅いタイミングで行われた場合には、後続する交差点Bでは、この交差点Bに関連付けて学習された減速分布に基づき、交差点Bにおける地点Pb5から上記空走期間Taを逆算した地点Pb6に車両Cが到達するタイミングを交差点Bにて減速支援を行うべきタイミングとして決定する。
【0080】
なお、こうした学習は上記交差点A及びBに限らず、一時停止交差点、信号交差点、踏切、交差点、「右折あり」や「左折あり」等の警戒標識が設置される曲率半径の小さなカーブ等の減速操作が必要となる交通情報毎に行われる。
【0081】
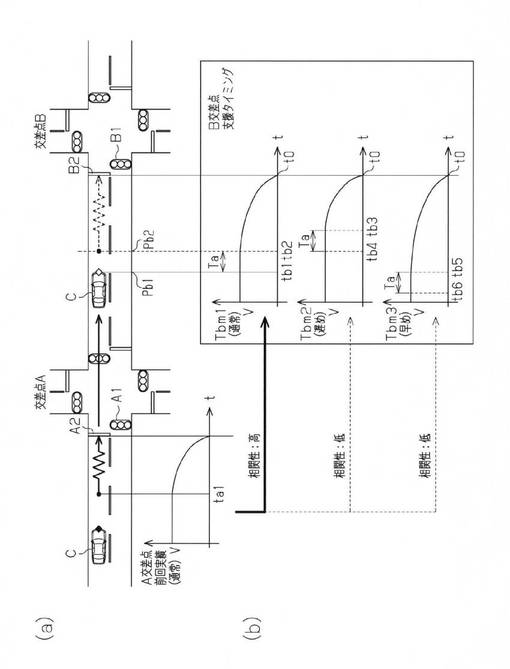
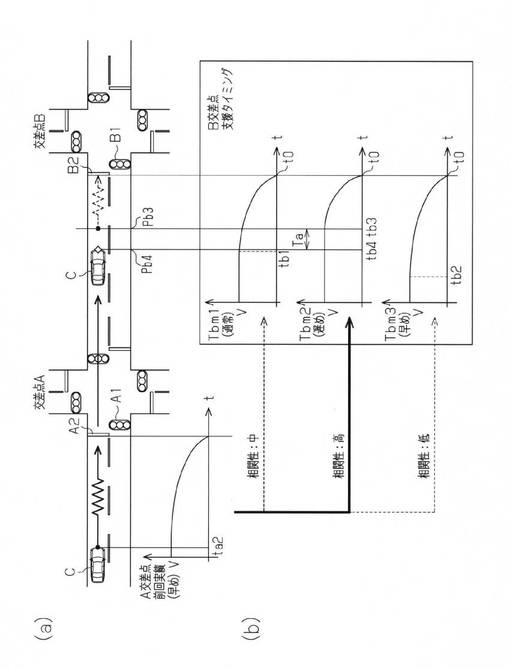
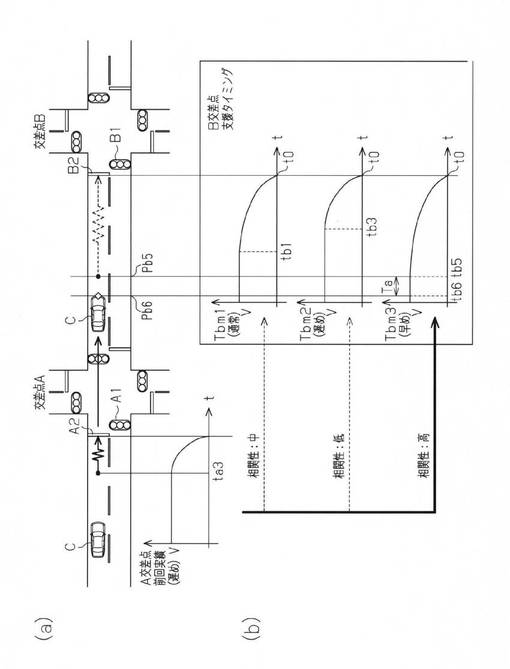
次に、こうした学習結果に基づき行われる減速支援タイミングの決定態様について図6〜図8を参照して説明する。なお、図6(a)〜図8(a)は、車両Cとその運転域に存在する交通情報としての交差点A及びBとの関係を模式的に示したものであり、図6(b)〜図8(b)は、交差点Aで行われた減速操作の実績に基づいて決定される交差点Bでの減速支援タイミングの一例を示したものである。
【0082】
まず、図6(a)に示すように、例えば信号機A1が赤現示とされている交差点Aにおいて、通常のタイミングta1による減速操作が行われたとする。そして、交差点Aを通過した車両Cが交差点Bに向かうときに信号機B1が赤現示である場合、上記運転支援装置100による減速支援が実行される。この減速支援に際しては、交差点Aで実際に減速操作が行われたタイミングta1に基づき、図6(b)に示すように、交差点Bでの減速操作として上記データベース142に学習されている減速タイミング情報Tbm1〜Tbm3のうち、相関性が最も高い学習値が選択される。ここでの例では、交差点Aで実際に行われた減速タイミングta1に基づき通常の減速タイミングTbm1が選択され、車両Cが先の地点Pb1を通過するタイミングtb1にて上記表示装置220や音声装置230による減速案内が通知される。こうして、空走期間Ta経過後、車両Cが先の地点Pb2を通過するタイミングtb2にてドライバによる減速操作が開始され、タイミングt0にて車両Cが停止線B2の手前で停止する。
【0083】
また、図7(a)に示すように、例えば信号機A1が赤現示とされている交差点Aにお
いて、通常よりも早いタイミングta2による減速操作が行われたとする。そして、この交差点Aで実際に行われた減速タイミングta2に基づき、図7(b)に示すように、相関性が最も高い減速タイミング情報Tbm2が交差点Bにて減速支援を行うための学習値として選択される。こうして、車両Cが先の地点Pb4を通過するタイミングtb4にて上記表示装置220や音声装置230による減速案内が通知される。これにより、空走期間Ta経過後、車両Cが先の地点Pb3を通過するタイミングtb3にてドライバによる減速操作が開始され、タイミングt0にて車両Cが停止線B2の手前で停止する。
【0084】
一方、図8(a)に示すように、例えば信号機A1が赤現示とされている交差点Aにおいて、通常よりも遅いタイミングta3による減速操作が行われたとする。そして、この交差点Aで実際に行われた減速タイミングta3に基づき、図8(b)に示すように、相関性が最も高い減速タイミング情報Tbm3が交差点Bにて減速支援を行うための学習値として選択される。こうして、車両Cが先の地点Pb6を通過するタイミングtb6にて上記表示装置220や音声装置230による減速案内が通知される。これにより、空走期間Ta経過後、車両Cが先の地点Pb5を通過するタイミングtb5にてドライバによる減速操作が開始され、タイミングt0にて車両Cが停止線B2の手前で停止する。
【0085】
このように、本実施の形態では、前回の減速地点で行われた減速操作と次の減速地点に学習されている減速操作に関する情報とに基づいて次の減速地点で行われる減速操作を予測し、この予測のもとに減速案内が通知される。これにより、連続する減速地点のもとでドライバが積み重ねた経験に応じた減速案内が行われるようになり、その都度変化するドライバの心理に即した減速操作が実現されるようになる。
【0086】
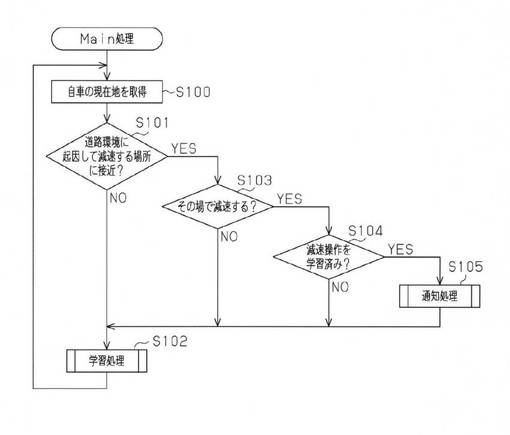
以下、このような前提のもとに行われる上記運転支援部140による運転支援手順を図9を参照して詳述する。
まず、運転支援装置100に対して目的地が設定され、ドライバによる車両操作が開始されると、ステップS100において、上記車両位置演算部126及び上記交通情報認識部114により、車両Cの現在地(位置情報)及び車両C周辺の交通情報が取得される。そして、それら取得された位置情報及び交通情報に基づいて、道路環境に応じて減速操作が行われる地点(交通情報)、例えば一時停止交差点、信号交差点、踏切、交差点、「右折あり」や「左折あり」等の警戒標識が設置されている曲率半径の小さなカーブ等に車両Cが接近しているか否かが判断される(ステップS101)。
【0087】
こうして、減速操作が行われる地点に車両Cが接近していないと判断されると、上記減速行動学習部141によって学習処理が実行されることにより、ドライバにより行われた車両操作が上記取得された交通情報に関連付けて学習される(ステップS101:NO、S102)。
【0088】
一方、減速操作が行われる地点に車両Cが接近したことによりドライバによる減速操作が行われたと判断されると、この地点(交通情報)にドライバによる車両操作が学習されているか否かが上記データベース142の参照を通じて判断される(ステップS101:YES、ステップS103、S104)。こうして、運転支援の対象とする交通情報に学習された車両操作に関する情報が関連付けられていれば、この車両操作に基づく減速支援タイミングの決定やこの決定されたタイミングでの減速案内といった通知処理が実行される(ステップS104、S105、)。そして、そのときに行われたドライバによる車両操作に関する情報が学習されるとともに、この車両操作が減速案内に対して追従していたか否かが併せて学習される(S102)。
【0089】
一方、減速操作が行われる地点に車両Cが接近したとしても、例えば交通情報としての交差点に設けられた信号機が青現示であり、同交差点を直進したために減速操作が行われ
なかった場合にも、ドライバによって行われた車両操作に関する情報が上記取得された位置情報及び交通情報に関連付けて学習される(ステップS103:NO、S102)。また、運転支援の対象とする交通情報に車両操作に関する情報が学習されていない場合にも同様に、ドライバによって行われた車両操作が上記取得された位置情報及び交通情報に関連付けて学習される(ステップS104:NO、S102)。
【0090】
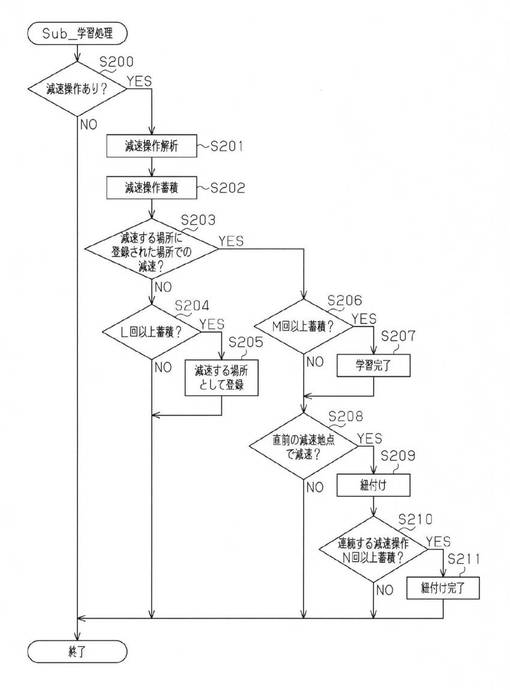
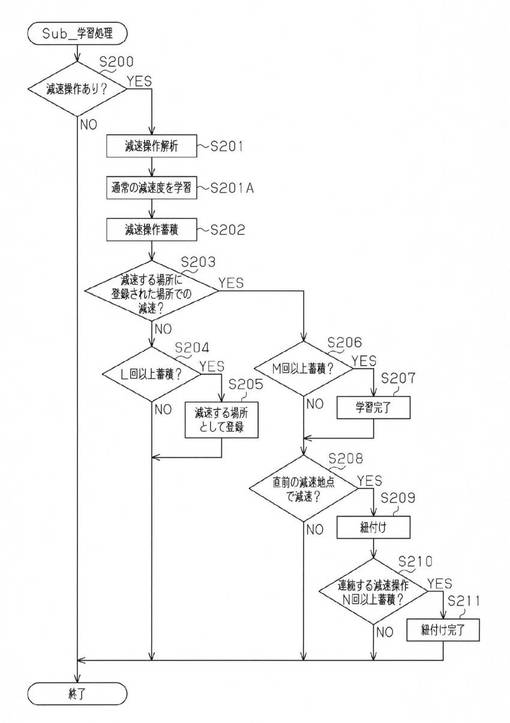
次に、上記減速行動学習部141によって実行される学習処理について図10を参照して説明する。
この学習処理では、ドライバによるアクセルオフやブレーキオン等の減速操作が行われると、この減速操作が開始されたタイミングが上記各センサ131〜134等の検出結果に基づき解析される(ステップS200、S201)。この解析により、例えば減速操作が通常のタイミングであったか否かなどが解析される。次いで、この解析された減速操作とこの減速操作が行われた地点(交通情報)とが関連付けられた情報が上記データベース142に蓄積されるとともに、その蓄積回数がカウントされる(ステップS202)。
【0091】
こうして減速操作が解析されると、当該減速操作が行われた地点が、上記カーナビゲーションシステム122の地図情報やデータベース142に減速操作が行われる交通情報として登録されているか否かが判断される(ステップS203)。この結果、減速操作が行われた地点が未登録であり、これまでに上記データベース142に減速地点と当該地点での減速操作とが蓄積されている回数がL回未満であれば、車両Cが走行する頻度が少ない経路での減速操作として判断される(ステップS203:NO、S204:NO)。このため、この判断対象とされた地点を、同地点のもとで行われる減速操作に関する情報を学習すべき地点として登録することなく本学習処理が終了する。また、減速操作が行われた地点が未登録であっても、上記カウントされる蓄積回数がL回以上であれば、この地点が同地点のもとで行われる減速操作を学習すべき地点として登録される(ステップS204:YES、S205)。このように本実施の形態では、減速操作が必要な地点として地図情報やデータベース142に登録されていない地点であっても、ドライバによる減速操作が行われる頻度に基づいて新たな減速地点として適宜追加されるようになる。
【0092】
一方、減速操作が行われた地点が上記カーナビゲーションシステム122の地図情報やデータベース142に減速操作が行われる交通情報として既に登録されており、上記蓄積回数がM回(M>L)以上であれば、その地点でのドライバ固有の減速操作パターンの学習が完了する(ステップS203:YES、S206:YES、S207)。
【0093】
そして、続くステップS208では、上記判断の対象とされた減速地点の直前に存在する減速地点、例えば先の図3〜図8に示した交差点Bの直前の減速地点である交差点Aにて減速操作が行われていたか否かが判断される。この結果、直前の減速地点でも減速操作が行われていた場合には、直前の減速地点(例えば交差点A)で行われた減速操作に関する情報と上記判断の対象とされた減速地点(例えば交差点B)で行われた減速操作に関する情報とが紐付けされて上記データベース142に蓄積される(ステップS208:YES、S209)。
【0094】
こうして、学習の対象とする地点での各々紐付けられた減速操作に関する情報の蓄積回数がN(N≧M>L)回以上となると、学習対象とする地点に登録される減速操作の紐付けが完了したとして本学習処理が終了する(ステップS211)。なお、本実施の形態では、このように減速地点毎に学習が完了された減速操作に関する情報であっても、例えば上記追従性判断部141bによる判断の結果、この学習された情報に基づく減速案内にドライバが追従しなかった場合、あるいは、追従しない頻度が増えた場合には、その減速操作に関する情報を修正すべき情報として再度の学習が行われる。これにより、ドライバに対する減速支援を行う上で、追従の無い減速操作が行われたときの減速操作に関する情報
の影響が抑制されるようになり、ドライバの意図がより反映された減速操作に関する情報の学習が可能となる。
【0095】
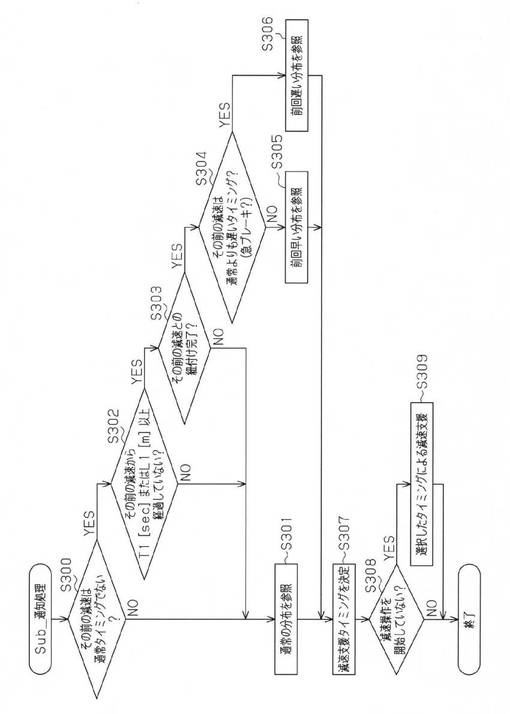
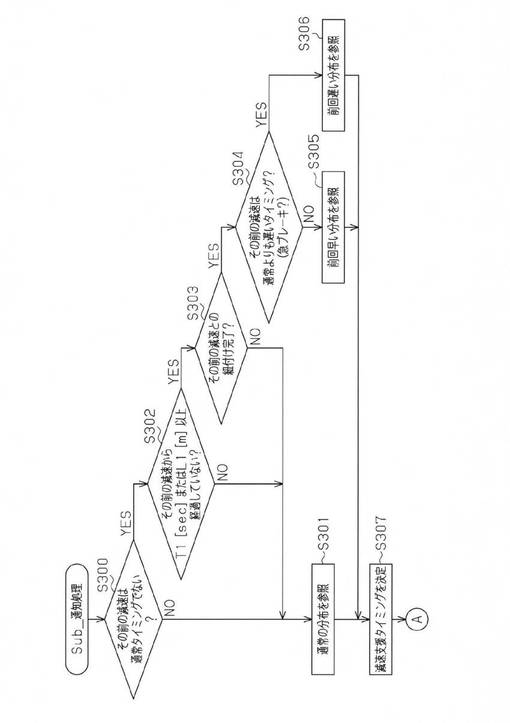
次に、上記運転支援部140によって実行される減速案内の通知処理について図11を参照して説明する。
この通知処理ではまず、先の図9のステップS105に示したように、減速操作が学習されている減速地点でドライバによる減速操作が行われたとすると、当該減速操作が行われる前に行われた減速操作が通常の減速タイミングであるか否かが判断される(ステップS300)。そして、前回行われた減速操作が通常の減速タイミングであった場合は、例えば先の図3、図6に示したように、前回の減速地点に関連付けて学習されている減速分布のうちの通常の減速分布に基づいて減速支援タイミングが選択される(ステップS300:NO、S301、S307)。
【0096】
一方、前回行われた減速操作が通常の減速タイミングではない場合には、前回の減速操作が行われてから所定の時間T1が経過しているか、もしくは、所定の距離T1を走行しているか否かが判断される(ステップS302)。そして、所定の時間T1が経過している場合、もしくは所定の距離T1を走行している場合は、前回の減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が小さいとして、通常の減速分布に基づく減速支援タイミングが選択される(ステップS302:NO、S301、S307)。
【0097】
また、前回の減速操作が行われてからの経過時間が時間T1未満、もしくは移動距離が距離T1未満である場合には、前回の減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が大きいとして、次の減速地点での減速操作に関する情報と前回の減速地点での減速操作に関する情報との紐付けが完了しているか否かが判断される(ステップS302:YES、S303)。
【0098】
この結果、各情報の紐付けが完了していないと判断された場合は、上記学習された減速操作に関する情報の信頼性が低いものとして、通常の減速分布に基づいて減速支援タイミングが選択される(ステップS303:NO、S301、S307)。
【0099】
一方、各情報の紐付けが完了していると判断された場合は、上記学習された減速操作に関する情報の信頼性が高いものとして、学習された減速操作に関する情報に基づいて減速支援タイミングが選択される(ステップS303:YES)。この減速支援タイミングの選択に際しては、前回行われた減速操作が通常よりも早いタイミングによる減速タイミングであった場合には、例えば先の図4、図7に示したように、通常のタイミングよりも早い減速分布に基づいて減速支援タイミングが決定される(ステップS304:NO、S305、S307)。一方、前回行われた減速操作が通常よりも遅いタイミングによる減速タイミングであった場合には、例えば先の図5、図8に示したように、通常のタイミングよりも遅い減速分布に基づいて減速支援タイミングが決定される(ステップS304:YES、S306、S307)。すなわち、前回行われた減速操作と相反するタイミングが次の減速支援タイミングとして選択される。
【0100】
こうして、前回の減速操作に応じた減速支援タイミングが決定されると、ドライバが次の減速地点で減速操作を開始しているか否かが判断され、既にドライバによる減速操作が開始されていれば、運転支援装置100による減速支援が不要であるとして本通知処理が終了する(ステップS308:NO)。一方、ドライバによる減速操作が行われていない場合には、各々決定された減速支援タイミングで上記表示装置220や音声装置230による減速案内が通知される(ステップS308:YES、S309)。こうして、その都度変化するドライバの意図に即した減速案内が通知されるようになる。
【0101】
以上説明したように、本実施の形態にかかる運転支援装置によれば、以下の効果が得られるようになる。
(1)車両Cの運転域においてドライバによる連続した車両操作が行われる過程で、交差点や一時停止位置等の減速地点毎にドライバにより行われた減速操作を学習した。そして、この学習を通じて連続する減速地点間で行われた減速操作に関する情報を紐付け、この紐付けされた情報とドライバにより行われた減速操作とに基づいて次の減速地点で実行すべき減速支援態様を決定することとした。このため、前回行われた減速操作から次に行われる減速操作を経験的に予測することができるようになり、この予測に基づく減速支援を行うことができるようになる。これにより、車両操作が行われる過程でドライバが積み重ねた経験によりドライバによる走行パターンが変化したとしても、そのときのドライバの心理に即した減速支援を行うことができるようになる。
【0102】
(2)次に行われる減速支援を、その直前に行われた減速操作に基づき決定することとした。これにより、ドライバの心理が最も反映された車両操作に基づく減速支援を行うことができるようになる。
【0103】
(3)次に行われる減速支援を、その直前に行われた車両操作との相関性に基づいて決定することとした。これにより、減速支援の対象とする減速地点で行われる減速操作を高い信頼性のもとに予測することができるようになる。
【0104】
(4)上記学習された減速操作に関する情報に基づく減速支援の要否を、前回の減速操作が行われてからの経過時間もしくは移動距離に基づき判断することとした。このため、前回の減速操作で積み重ねた経験が次の減速操作に反映される可能性が高いときに限って上記学習された減速操作に関する情報に基づく減速支援が実行されるようになる。
【0105】
(5)上記運転支援に必要とされる要素として減速操作が行われるタイミングを学習し、この学習結果から特徴量が異なる3つの減速分布、すなわち通常のタイミングによる減速分布、通常よりも早いタイミングによる減速分布、通常よりも遅いタイミングによる減速分布を作成した。このため、前回行われた減速操作のタイミングと各々作成された減速分布との照合を通じて次に行われる減速操作を予測することができるようになり、次の減速地点での減速支援態様を容易に選択することができるようになる。
【0106】
(6)上記追従性判断部141bによる判断の結果、この学習された情報に基づく減速案内にドライバが追従しなかった場合、あるいは、追従しない頻度が増えた場合には、その減速操作に関する情報を修正すべき情報として再度の学習を行うこととした。これにより、ドライバに対する減速支援を行う上で、追従の無い減速操作が行われたときの減速操作に関する情報の影響が抑制されるようになり、ドライバの意図がより反映された減速操作に関する情報の学習が可能となる。
【0107】
(7)上記学習される操作態様に関する情報として各交通情報下での車両の減速操作に関する情報を学習し、次期運転支援態様の決定を車両Cの減速操作に基づく減速支援タイミングの決定として行うこととした。これにより、ドライバ固有の癖が特に反映されやすい減速パターンを学習することができるようになり、ひいては、ドライバ固有の癖に応じた減速支援を行うことができるようになる。
【0108】
(8)次に実行される減速支援タイミングとして、前回行われた減速操作と相反するタイミングを選択することとした。これにより、前回の車両操作の際にドライバが積み重ねた経験に対応する減速支援を容易に行うことができるようになる。
【0109】
(9)上記減速操作が行われる地点の学習に際し、減速操作が必要な地点としてカーナ
ビゲーションシステム122の地図情報やデータベース142に登録されていない場所であっても、減速操作が所定回数(L回)以上行われることを条件に減速地点として登録することとした。これにより、実際のドライバの減速操作に基づいて減速支援が必要とされる地点を適宜学習することができるようになり、減速支援可能な範囲がドライバによる車両操作の実績に基づいて拡張されるようになる。また、減速操作が所定回数(L回)以上行われることを条件に減速地点として登録することにより、ドライバによる減速操作が行われる頻度が高い減速地点のみを学習することができるようになる。これにより、必要最小限の情報量に基づく運転支援が可能となる。
(10)減速操作が必要となる交差点等の交通情報を、車載カメラ111、インフラ通信装置112、カーナビゲーションシステム122の地図情報等を用いて取得することとした。これにより、車両の減速操作が必要となる減速地点の認識を的確に行うことができるようになり、ひいては、この認識に基づく減速支援にかかる信頼性が高められるようになる。
【0110】
(第2の実施の形態)
次に本発明にかかる運転支援装置を具体化した第2の実施の形態について図12〜図15を参照して説明する。なお、本実施の形態の運転支援装置は、ドライバにより行われた減速操作の減速度も加味して次期運転支援態様を決定するものであり、その基本的な構成は先の第1の実施の形態と共通したものとなっている。以下、本実施の形態の運転支援装置について図12〜図15を参照して説明する。
【0111】
ここで、図12(a)に示すように、車両Cが、例えば交差点等の減速地点での通常のタイミングによる減速操作、あるいは通常よりも遅めのタイミングによる減速操作を終えて、信号機B1を有する交差点Bに向って進行しているとする。そして、車両C1が交差点Bに向かう途中で進行方向前方の車両C2が駐車場Pに進入するために急減速し、右折した場合には、前方の車両C2との接触を回避すべく、図12(b)に示すように、自車両C1のドライバによる急減速操作が行われる。このため、車両C1のドライバは、以後の車両操作では通常よりも慎重な車両操作を行うようになり、例えば信号機B1が青現時となっている交差点Bを右折する際には、通常よりも早いタイミングで余裕を持った減速操作を開始するようになる。すなわち、このような突発的な急減速が行われた場合には、ドライバの心理は、交差点Bの直前に存在する減速地点で減速操作が行われたときから変化しており、前回の減速地点のもとで行われた減速操作に基づいて交差点Bでの減速支援態様を決定したとしてもドライバの心理に即した減速支援が行われるとは限らない。
【0112】
そこで本実施の形態では、連続する減速地点の途中でドライバによる急減速操作が行われた場合には、この急減速操作を基準として次の減速地点での減速支援態様を決定することとする。
【0113】
以下、本実施の形態による減速操作に関する情報の学習処理について先の図10に対応する図として図13を参照して説明する。
この学習処理ではまず、ステップS200においてドライバによるアクセルオフやブレーキオン等の減速操作が行われると、この減速操作が開始されたタイミングや減速度が上記各センサ131〜134等の検出結果に基づき解析される(ステップS201)。そして、ドライバによる減速操作が行われる都度こうした解析が行われることにより、減速支援の対象とするドライバが通常の減速操作を行うときの減速度が学習される(ステップS201A)。この学習により、例えば最も高い頻度で行われた減速操作の減速度がドライバによる通常の減速度として減速度として学習される。そして、本実施の形態では、この通常の減速度を基準にドライバによる減速度が急減速(急ブレーキ)であったか否かなどの判断が上記減速度判断部141aにより行われる。こうして通常の減速度が学習されると、先の図10のステップS202〜S211と同様に減速地点の登録や減速操作に関す
る情報の紐付け等が実行される。
【0114】
次に、本実施の形態による減速案内の通知処理について先の図11に対応する図として図14及び図15を参照して説明する。
まず、図14に示すように、減速操作が学習されている減速地点でドライバによる減速操作が行われたとすると、当該減速操作が行われる前に行われた減速操作が通常の減速タイミングであるか否かが判断される(ステップS300)。そして、先の図11のステップS301〜S307と同様に、この前回行われた減速操作のタイミングに基づき次の減速地点で実行する減速支援タイミングが決定される(ステップS301〜S307)。
【0115】
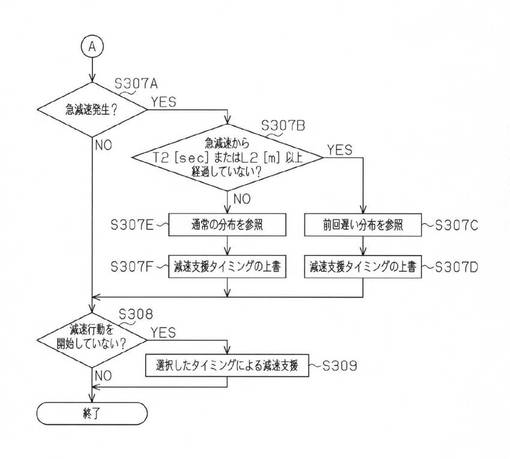
ここで、本実施の形態では、図15に示すように、前回の減速地点から次の減速地点に至る途中で、前方を走行する車両の急減速等といった走行環境に起因してドライバによる急減速が行われたか否かが判断される(S307A)。すなわち、前回の減速地点から次の減速地点に至る途中で行われた減速操作の減速度が、先の学習処理において学習された通常の減速度よりも急であるか否かが判断される。
【0116】
そして、次の減速地点に向かう途中で急減速操作が行われた場合には、急減速操作が行われてから所定の時間T2が経過しているか、もしくは、所定の距離T2を走行しているか否かが判断される(ステップS307B)。
【0117】
この結果、急減速操作が行われてからの経過時間が時間T2未満、もしくは移動距離が距離T2未満である場合には、急減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が大きいとして、通常のタイミングよりも遅い減速分布に基づき減速支援タイミングが再選択される(ステップS307B:YES、S307C)。そして、ステップS307において一旦決定された減速支援タイミングが上書きされる(ステップS307D)。一方、所定の時間T2が経過している場合、もしくは所定の距離T2を走行している場合は、これまでの減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が小さいとして、通常の減速分布に基づいて減速支援タイミングが再選択される(ステップS307B:NO、S307E)。そしてこの場合にも、ステップS307において一旦決定された減速支援タイミングが上書きされる(ステップS307F)。
【0118】
このように次の減速地点に向かう途中で急減速が発生した場合には、各々上書きされた減速支援タイミングとなったときに、上記表示装置220や音声装置230による減速案内がドライバに対して通知される(ステップS307A:YES、ステップS308、309)。また、次の減速地点に向かう途中で急減速が行われなければ、先のステップS307において各々決定された減速支援タイミングになったときに、上記表示装置220や音声装置230による減速案内がドライバに対して通知される(ステップS307A:NO、S308、309)。
【0119】
このように本実施の形態では、前回の減速地点から次の減速地点に向かう途中で急減速が発生した場合には、前回の減速地点で行われた減速操作よりもその後に行われた急減速操作がドライバの心理に与える影響が大きいとして、一旦決定された減速支援タイミングが上書きされるようになる。
【0120】
以上説明したように、本実施の形態にかかる運転支援装置によれば、前記(1)〜(10)に示した効果が得られるとともに、さらに以下の効果が得られるようになる。
(11)連続する減速地点の間で急減速操作が行われた場合には、前回の減速操作に関する情報に基づき一旦選択された減速支援タイミングを上書きすることとした。これにより、急減速が発生したことによりドライバの心理が前回の減速操作が行われたときから変化したとしても、ドライバの心理に応じた減速支援が行われるようになる。
【0121】
(12)また、このように急減速が発生したか否かを基準として減速支援タイミングを決定することにより、次の減速地点での減速支援態様を容易に決定することができるようになる。
【0122】
(他の実施の形態)
なお、上記各実施の形態は、以下のような形態をもって実施することもできる。
・上記各実施の形態では、前回の減速地点で行われた減速操作に基づいて次の減速地点での減速支援態様を決定することとした。これに限らず、次の減速地点に向かう途中で走行環境に起因する急減速操作が行われたか否かのみを基準として次の減速地点での減速支援態様を決定するようにしてもよい。これにより、たとえ次の減速地点での減速操作に関する情報の学習や紐付けが完了していなかったとしても、急減速の発生の有無のみを基準として次の減速地点での減速支援態様を決定することができるようになる。これにより、学習支援態様を容易に決定することができるようになるとともに、減速支援可能な範囲が拡張されるようになる。
【0123】
・上記各実施の形態では、減速操作が行われた地点を新たな減速地点として登録する条件として、上記データベース142に蓄積された回数がL回以上蓄積されたことを条件とした。これに限らす、ドライバによる減速操作が行われた地点の全てを減速地点としてデータベース142に登録し、この減速地点のもとで行われる減速操作に関する情報を適宜学習するようにしてもよい。
【0124】
・上記各実施の形態では、次の減速支援タイミングとして、前回行われた減速操作と相反するタイミングを選択することとした。これに限らず、次の減速支援タイミングとしてはドライバ固有の癖が反映されたタイミングであればよく、前回行われた減速操作と同様のタイミングによる減速支援を行うこととしてもよい。
【0125】
・上記各実施の形態では、上記運転支援モデル142aに予め登録されている減速操作に関する情報(減速分布)とは別途にドライバ固有の減速操作に関する情報を学習することとした。これに限らず、先の図1に対応する図として例えば図16に示すように、減速行動学習部141として、上記運転支援モデル142aに登録されている標準的な車両操作と実際に行われた車両操作との差分であるずれ量を学習するずれ量学習部141cを備える構成としてもよい。この場合には、例えば上記ずれ量学習部141cにより学習されたずれ量を適宜記録するずれ量記録部142bをデータベース142に設ける。また次期支援態様決定部143に、このずれ量記録部142bに記録されているずれ量と前回行われた車両操作とに基づき運転支援モデル142aに登録されている標準的な車両操作に関する情報を適宜補正して次の運転支援態様として出力する補正部143bを設ける。これにより、既存の運転支援モデル142aを適宜補正することによりドライバ固有の癖に即した運転支援を行うことができるようになり、より少ないデータ量に基づく運転支援が実現されるようになる。
【0126】
・上記各実施の形態では、上記減速行動学習部141に追従性判断部141bを備える構成としたが、この追従性判断部141bを割愛する構成としてもよい。そして、減速行動学習部141による学習として、交通情報下で行われた車両の操作態様に関する情報のみを学習するようにしてもよい。
【0127】
・上記各実施の形態では、上記データベース142として上記運転支援モデル142aを備える構成とし、この運転支援モデル142aに予め登録されている標準的な減速パターンを運転支援の対象とするドライバの通常の減速分布として用いることとした。これに限らず、上記減速行動学習部141により学習された情報に基づき、例えば最も高い頻度
で行われる減速操作(減速タイミング)の分布をそのドライバによる通常の減速分布として用いるようにしてもよい。
【0128】
・上記各実施の形態では、前回の減速操作が行われてからの経過時間が時間T1、T2未満、もしくは移動距離が距離T1、T2未満であるときに、前回の減速操作を反映させるかたちで次の減速支援態様を決定することとした。これに限らず、前回の減速操作が行われてからの経過時間が時間T1、T2未満であり、かつ移動距離が距離T1、T2未満であるときに前回の減速操作を反映させるかたちで次の減速支援態様を決定するようにしてもよい。
【0129】
・また、減速支援態様の決定に限らず、前回の車両操作からの経過時間が所定時間以内であることや前回の車両操作からの移動距離が所定距離以内であることを条件に、減速地点毎の減速操作に関する情報の学習を行うようにしてもよい。これにより、ドライバ固有の連続的な走行パターンを高い精度のもとに学習することができるようになる。
【0130】
・上記各実施の形態では、要素毎に特徴量が異なる複数の操作態様として通常の減速分布、通常よりも早い減速分布、通常よりも遅い減速分布に分類し、それら3つの減速分布に基づいて通常のタイミングでの減速支援、通常よりも遅いタイミングでの減速支援、通常よりも早いタイミングでの減速支援を行うこととした。これに限らず、上記減速行動学習部141による学習として、例えば時間帯、天候、車両の総重量、乗車人数等のドライバによる車両操作態様に影響を与える各要素を減速操作に関する情報に紐付けて学習し、それら要素毎にさらに細分化された減速分布を減速地点毎に関連づけて学習するようにしてもよい。そして、前回の減速操作とそのときの天候、車両の総重量、乗車人数等の情報とに基づき上記細分化された減速分布を参照し、次の減速地点での減速支援を決定するようにしてもよい。これにより、ドライバ固有の減速操作に関する情報のより細やかな学習ができるようになり、この学習された情報に基づく細やかな減速支援が行われるようになる。
・また、この要素として車両を運転するドライバを特定し、この特定されたドライバ毎に減速操作に関する情報を学習するようにしてもよい。これにより、運転支援の対象とするドライバが変更されたとしても、この変更されたドライバの固有の減速操作に即した運転支援が行われるようになる。
・上記各実施の形態では、運転支援装置100による運転支援として、表示装置220及び音声装置230を介した減速案内を行うこととした。これに限らず、各々選択されたタイミングに基づいて上記ブレーキ制御装置200やエンジン制御装置210による予備制動を行うようにしてもよい。
【0131】
・上記各実施の形態では、ドライバによる車両操作に関する情報として減速操作に関する情報を学習し、次期運転支援態様の決定としてドライバによる減速操作に基づく車両の減速支援タイミングの決定として行うこととした。これに限らず、ドライバによる車両操作に関する情報としては、ドライバ固有の走行パターンが反映されるものであればよく、例えば右折操作や左折操作等に関する情報を学習し、この学習された情報に基づき次期運転支援態様を決定するようにしてもよい。
【0132】
・上記各実施の形態では、減速支援が行われる交通情報として交差点で行われる減速支援を例示したが、減速支援の対象となる地点(場所)とは、ドライバ固有の減速操作が反映される地点であればよく、この他、踏切やカーブ、駐車場等であってもよい。
【0133】
・上記各実施の形態では、減速操作が必要となる交差点等の交通情報を、車載カメラ111、インフラ通信装置112、カーナビゲーションシステム122の地図情報等を用いて取得することとした。この他、例えば車両間通信システムや路車間通信システムを通じ
て上記交通情報を取得するようにしてもよい。要は、交差点に設けられた信号機の現示(灯色)状態や、踏切、標識等に関する交通情報を取得可能なものであればよく、いずれの手段を用いて交通情報を取得するかは任意である。
【符号の説明】
【0134】
A1、B1…信号機、A、B…交差点、C、C1、C2…車両、100…運転支援装置、110…交通情報取得部、111…車載カメラ、112…インフラ通信装置、113…光ビーコンアンテナ、114…交通情報認識部、120…車両位置取得部、121…GPS、122…カーナビゲーションシステム、123…操舵角センサ、124…ヨーレートセンサ、125…車速センサ、126…車両位置演算部、130…減速量検出部、131…アクセルセンサ、132…ブレーキセンサ、133…加速度センサ、134…ジャイロセンサ、135…減速行動演算部、140…運転支援部、141…減速行動学習部、141a…減速度判断部、141b…追従性判断部、141c…ずれ量学習部、142…データベース、142a…運転支援モデル、142b…ずれ量記録部、143…次期支援態様決定部(判断手段)、143a…経路予測部、143b…補正部、200…ブレーキ制御装置、210…エンジン制御装置、220…表示装置、230…音声装置。
【技術分野】
【0001】
本発明は、運転支援装置に関し、特に車両の減速支援等に採用して有益な車両支援装置に関する。
【背景技術】
【0002】
一般に、上記車両の運転支援装置では、交差点や一時停止位置、カーブ、前方車両の接近等といった車両の減速制御が必要となる交通情報を車載カメラやナビゲーションシステムにより取得している。そして、この取得された車両周辺の交通情報に基づいて、音声による減速案内や半強制的な制動力を付与することによる減速支援を行うことにより、ドライバに対する運転支援が行われている。このような運転支援に際しては、通常、所定の走行モデルのもとで測定された一般のドライバの交通情報の認知、判断、運転操作といった各種運転行動である走行パターンを平均化した標準走行パターンが用いられる。
【0003】
ところで、交差点や一時停止位置等に向かう車両の走行パターンは、道路のカーブの曲率、道路の幅や傾斜等の道路環境によっても変化する。また、こうした車両の走行パターンは、ドライバ固有の癖によっても異なるものであり、実際に車両を運転するドライバの走行パターンに上記一般化された標準走行パターンが適合しない場合もある。このため、一般化された標準走行パターンに基づきドライバに対する運転支援を行ったとしても、必ずしもドライバの意図に沿った運転支援が行われるとは限らず、ドライバに違和感を与えることすらあった。
【0004】
そこで従来、例えば特許文献1に記載の運転支援装置では、一時停止位置等の減速地点が存在する経路毎にドライバの走行パターンを個別に記憶し、この記憶されたドライバ固有の走行パターンに基づいてドライバに対する運転支援を行うこととしている。
【0005】
また、特許文献2に記載の運転支援装置では、特定の交差点や一時停止位置、カーブといった交通情報毎にそのときの車両の走行状態とドライバによる運転操作に関する操作情報とが関連付けられたドライバ固有の運転操作記録を記録装置に適宜記録することとしている。そして、車両の走行時に取得された交通情報に近似する交通情報を上記運転操作記録から検索し、この検索された交通情報に関連付けされている走行状態及び操作情報に基づいて、ドライバに対する警報内容を決定するようにしている。
【0006】
このように、特許文献1や特許文献2に記載の運転支援装置によれば、ドライバ毎に学習された走行パターンに基づき、ドライバ固有の走行パターンが考慮された運転支援を行うことができるようになる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−297621号公報
【特許文献2】特開2008−276327号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、ドライバによる車両の運転操作とは、車両の出発地点から到着地点までの間に存在する複数の交差点やカーブ等といった連続する交通要素に対する連続した動作として行われる。そして通常、ある交差点においてブレーキ操作が遅れた場合には、この経験に基づき、次の交差点では通常よりも早いタイミングでブレーキ操作が行われる。また、
ある交差点においてブレーキ操作が早過ぎた場合には、この経験に基づき、次の交差点では通常よりも遅いタイミングでブレーキ操作が行われる。このように、車両の運転操作を行う過程でドライバが積み重ねた経験によっても、交差点や一時停止位置等の減速地点での車両の走行パターンは変化する。
【0009】
一方、上述のように、車両の運転支援が必要となる地点毎にドライバ固有の走行パターンを学習したとしても、この学習された走行パターンとはあくまで、運転支援を必要とする各地点毎に個別に学習された単発的なものでしかない。このため、例えば車両を運転する過程で、上記積み重ねた経験に基づき次の減速地点で通常よりも早め、あるいは遅めのブレーキ操作をドライバが行おうとする際に、上記個別に学習された走行パターンに基づく運転支援が行われたとしても、ドライバの意図に沿った運転支援が行われるとは限らない。
【0010】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供することにある。
【課題を解決するための手段】
【0011】
以下、上記課題を解決するための手段及びその作用効果について記載する。
請求項1に記載の発明は、走行環境情報である交通情報に基づき車両の運転を支援する運転支援装置において、前記車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習し、前記運転域での車両操作が行われる都度、そのときの交通情報に対応して次に実行すべき運転支援態様である次期運転支援態様を該当する交通情報に関連付けして学習した情報に基づき決定することを要旨とする。
【0012】
上記構成によれば、車両の運転域においてドライバによる車両の連続した運転操作が行われる過程で、交差点や一時停止位置、車両の周辺環境といった各交通情報のもとで行われる操作態様が同交通情報毎に関連付けして学習される。そして、このような学習を通じて、車両の出発地点から到着地点までの間に存在する各交通情報下でドライバが積み重ねた経験に基づき行われる一連の走行パターン(車両操作)が適宜学習されるようになる。このため、例えばある交通情報には、その交通情報に至るまでにドライバが積み重ねた経験に基づき行われた操作態様に関する情報が学習されるようになる。
【0013】
そして、上記運転域でのある交通情報のもとで車両操作が行われると、上記交通情報に関連付けて学習された情報に基づいて次期運転支援態様が決定される。すなわち、ある車両操作が行われると、その車両操作にドライバの心理が反映されているものとして、上記学習された車両操作に関する情報に基づきそのときのドライバの心理に即した運転支援態様が決定される。これにより、車両の運転操作を行う過程で変化するドライバの心理に即した運転支援を実現することができるようになる。
【0014】
請求項2に記載の発明は、請求項1に記載の運転支援装置において、前記次期運転支援態様が決定される前記運転域での車両操作が、前記該当する交通情報の直前に行われた車両操作であることを要旨とする。
【0015】
連続する交通情報のもとで行われるドライバの操作態様はドライバが積み重ねた経験に基づくものが大きく、特に直前の交通情報や同交通情報のもとで行われた車両操作に基づき行われることが多い。このため、上記構成によれば、上記対応する交通情報において直前に行われた車両操作に基づいて次に実行すべき運転支援態様が決定されることから、ドライバの心理が最も反映された車両操作に基づく次期運転支援態様の決定が可能となる。
【0016】
請求項3に記載の発明は、請求項2に記載の運転支援装置において、前記次期運転支援態様として前記該当する交通情報に関連付けして学習した操作態様に関する情報に基づき決定される操作態様が、同該当する交通情報の直前に行われた車両操作から予測される操作態様であることを要旨とする。
【0017】
例えば、ある交差点において減速操作が遅れた場合には、この経験に基づき次の交差点では通常よりも早いタイミングで減速操作が行われる。また、ある交差点において減速操作が早過ぎた場合には、この経験に基づき、次の交差点では通常よりも遅いタイミングで減速操作が行われる。さらに、ある交差点において減速操作が同交差点に適したタイミングで行われた場合には、この経験に基づき、次の交差点でも同様のタイミングで減速操作が行われる。このように、連続する交通情報下でドライバが積み重ねた経験に基づき行われる車両操作にあっては、前回行われた操作態様と次に行われる操作態様との間に一定の法則性が存在し、前回行われた操作態様との相関性が高い操作態様や相関性が低い操作態様が存在する。そこで、こうした各操作態様毎の相関性の高低等に基づいて次に行われる操作態様を予測し、この予測に基づいて次期運転支援態様を決定することとすれば、ドライバの意図に即した減速支援を高い信頼性のもとに行うことができるようになる。
【0018】
請求項4に記載の発明は、請求項2または3に記載の運転支援装置において、前記学習の要否、及び前記学習された操作態様に関する情報に基づく運転支援の要否、の少なくとも一方が、前記該当する交通情報の直前に行われた車両操作から前記該当する交通情報に至るまでの経過時間及び移動距離の少なくとも一方に基づき判断されることを要旨とする。
【0019】
連続する交通情報のもとで行われる車両操作は、前回の車両操作からの経過時間が少ないほど、また前回の車両操作からの移動距離が少ないほど、前回の車両操作の際にドライバが積み重ねた経験に基づいて行われることが多く、前回の車両操作との結びつきである相関性も自ずと高くなる。これに対し、連続する交通情報のもとで行われる車両操作であっても、ある地点で車両操作が行われてから所定時間の経過後や所定距離を走行した後に行われる車両操作は、ドライバの心理状態の変化に伴って前回の車両操作との相関性が逆に低くなる。
【0020】
このため、例えば前回の車両操作からの経過時間が所定時間以内であることや前回の車両操作からの移動距離が所定距離以内であることを条件に上記学習を行うこととすれば、ドライバ固有の連続的な走行パターンを高精度に学習することができるようになる。また同様に、前回の車両操作からの経過時間が所定時間以内であることや前回の車両操作からの移動距離が所定距離以内であることを条件に上記学習された情報に基づく運転支援を行うこととすれば、ドライバの意図に沿った運転支援を的確に行うことができるようになる。
【0021】
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載の運転支援装置において、前記学習は、前記運転支援に必要とされる要素毎に特徴量の異なる複数の操作態様に関する情報を対象として行われることを要旨とする。
【0022】
ドライバによる車両操作は、同一の交通情報下であっても、前回の車両操作態様や天候、車両の乗車人数といった各種要素に起因してその特徴量が変化する。このため、こうした各種要素に応じて特徴量が変化する操作態様毎に上記学習を行うことにより、要素毎に細分化されたドライバ固有の操作態様を学習することができるようになる。これにより、特徴量が共通する操作態様の照合を共通する要素の照合として行うことができるようになるとともに、ドライバの意図に沿った細やかな運転支援が実現されるようになる。
【0023】
請求項6に記載の発明は、請求項1〜5のいずれか一項に記載の運転支援装置において、前記学習は、前記車両の運転支援が実行されたときの車両操作の追従の有無を加味し、追従の無い車両操作が行われたときの操作態様に関する情報の影響を抑制するかたちで行われることを要旨とする。
【0024】
上記構成によるように、上記学習される操作態様として車両の運転支援が実行されたときの車両の操作態様の追従の有無を加味することとすれば、上記学習に基づく運転支援がドライバの意図に沿った運転支援であったか否かも併せて学習されるようになる。そして例えば、車両操作の追従の有無に基づいて交通情報毎に学習された操作態様を適宜修正することにより、一旦学習された操作態様に関する情報をドライバの意図が反映された情報に適宜修正することができるようになる。また、次の運転支援を決定する際には、上記学習された操作態様の照合に併せて同操作態様に対する車両操作の追従の履歴を参照することにより、ドライバの追従の有無が反映された運転支援を行うことができるようになる。このように、上記構成によれば、追従の有無の学習を通じて追従の無い車両操作が行われたときの操作態様に関する情報の影響を抑制することにより、ドライバの意図が大きく反映された学習及び運転支援を行うことができるようになる。
【0025】
請求項7に記載の発明は、請求項1〜6のいずれか一項に記載の運転支援装置において、前記交通情報毎に前記操作態様を標準化した運転支援モデルをさらに備え、前記学習は、各該当する交通情報での前記運転支援モデルと実際に行われた車両操作とのずれ量の学習として行われ、前記次期運転支援態様の決定は、この学習されたずれ量に基づく前記運転支援モデルの補正として行われることを要旨とする。
【0026】
上記構成によるように、交通情報毎に前記操作態様を標準化した運転支援モデルを備えるとともに、各該当する交通情報での運転支援モデルと実際に行われた車両操作とのずれ量の学習として上記学習を行うこととすれば、既存の運転支援モデルを補正することのみによってドライバ固有の走行パターンに即した運転支援を行うことができるようになる。これにより、上記運転支援装置としての汎用性が高められるようになるとともに、上記運転支援にかかるデータ量の低減が図られるようになる。
【0027】
またこの発明は、ドライバ固有の走行パターンが上記運転支援モデルに近似する走行パターンであるときに特に有効であり、この場合には、必要最小限のずれ量の学習による運転支援を行うことができるようになる。
【0028】
請求項8に記載の発明は、請求項1〜6のいずれか一項に記載の運転支援装置において、前記交通情報毎に前記操作態様を標準化した運転支援モデルと、前記車両の運転支援が実行されたときの車両操作の追従態様に基づいて前記学習された情報の信頼性を判断する判断手段とをさらに備え、前記学習は、前記各交通情報下で検出された操作態様そのものを交通情報毎に関連付ける態様で行われ、前記次期運転支援態様の決定は、各該当する交通情報での前記判断手段により信頼性が維持されている旨判断されている操作態様と前記運転支援モデルとのいずれかの選択として行われることを要旨とする。
【0029】
上記構成によれば、標準化された運転支援モデルと別途に、ドライバの操作態様に基づき学習された走行モデルが構築される。そして、次期運転支援態様の決定に際しては、例えば該当する交通情報に学習されている操作態様に関する情報の信頼性が上記判断手段により高いと判断されていれば、その操作態様に基づき次期運転支援態様が決定される。同様に、操作態様に関する情報の信頼性が上記判断手段により低いと判断されていれば、標準化された運転支援モデルに基づき次期運転支援態様が決定される。このように上記構成によれば、判断手段の判断を通じてより信頼性の高い運転支援を行うことができるように
なる。
【0030】
請求項9に記載の発明は、請求項1〜8のいずれか一項に記載の運転支援装置において、前記学習される操作態様に関する情報は、前記各交通情報下での車両の減速操作に関する情報であり、前記次期運転支援態様の決定は、当該車両の減速操作に基づく車両の減速支援タイミングの決定として行われることを要旨とする。
【0031】
上記運転支援は、車両が交差点や一時停止位置等に差し掛かる際の減速操作時に特に必要とされ、ドライバ固有の癖も車両操作に反映されやすい。この点、上記構成によれば、例えばドライバに対する警告や半強制的な制動力の付与等の減速支援が行われるタイミングを上記学習に基づき決定することにより、ドライバの意図に即した減速支援を行うことができるようになる。
【0032】
請求項10に記載の発明は、請求項9に記載の運転支援装置において、前記次期運転支援態様として決定される前記車両の減速支援タイミングは、前記該当する交通情報の直前に行われた車両の減速操作のタイミングと相反するタイミングに設定されることを要旨とする。
【0033】
通常、ある交差点において減速操作が遅れた場合には、この経験に基づき次の交差点では通常よりも早いタイミングで減速操作が行われる。また、ある交差点において減速操作が早過ぎた場合には、この経験に基づき、次の交差点では通常よりも遅いタイミングで減速操作が行われる。このように、連続する交通情報下で行われる減速操作は通常、前回の減速操作の際の経験に基づき、次の減速操作では前回の減速操作と相反するタイミングにて行われる。このため、上記構成によれば、こうした推測のもとに上記減速支援タイミングを決定することにより、ドライバの意図に即した減速支援を容易に行うことができるようになる。
【0034】
請求項11に記載の発明は、請求項1〜10のいずれか一項に記載の運転支援装置において、前記交通情報は、車載用のカーナビゲーションシステム、及び車載カメラ、及び車両間通信システム、及び路車間通信システムの少なくとも1つを通じて取得されることを要旨とする。
【0035】
上記交通情報とは、例えば交差点や一時停止位置、カーブ等があり、この種の情報は通常、上記カーナビゲーションシステムを通じて取得可能である。このため、上記構成によれば、交通情報の取得とこの取得された交通情報に基づき上記運転支援とを1つのカーナビゲーションシステムによって行うことができるようになる。また、車載カメラや車両間通信システムにより上記交通情報を取得することとすれば、実際に車両が走行している交通情報を高い精度のもとに取得することができるようになる。
【図面の簡単な説明】
【0036】
【図1】本発明の運転支援装置の第1の実施の形態について、その構成を示すブロック図。
【図2】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、同交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図3】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、連続する交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図4】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、連続する交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図5】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、連続する交差点のもとで行われた減速操作の分布の一例を示すグラフ。
【図6】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、減速支援タイミングの選択態様の一例を示すグラフ。
【図7】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、減速支援タイミングの選択態様の一例を示すグラフ。
【図8】(a)は、交通情報としての交差点と車両との関係を示す図。(b)は、減速支援タイミングの選択態様の一例を示すグラフ。
【図9】同実施の形態の運転支援装置による運転支援手順を示すフローチャート。
【図10】同実施の形態の運転支援装置による学習処理を示すフローチャート。
【図11】同実施の形態の運転支援装置による通知処理を示すフローチャート。
【図12】本発明の運転支援装置の第2の実施の形態について、(a)は、交通情報としての交差点及び前方車両と自車両との関係を示す図。(b)は、交差点のもとで行われた減速操作の推移例を示すグラフ。
【図13】同実施の形態の運転支援装置による学習処理を示すフローチャート。
【図14】同実施の形態の運転支援装置による通知処理を示すフローチャート。
【図15】同実施の形態の運転支援装置による通知処理を示すフローチャート。
【図16】本発明の運転支援装置の他の実施の形態について、その構成を示すブロック図。
【発明を実施するための形態】
【0037】
(第1の実施の形態)
以下、本発明にかかる運転支援装置を具体化した第1の実施の形態について図1〜図11を参照して説明する。なお、本実施の形態の運転支援装置は、車両に搭載されて同車両の運転を操作するドライバの運転支援に用いられる装置である。図1に、本実施の形態の運転支援装置の概略構成を示す。
【0038】
図1に示すように、運転支援装置100は、それぞれ各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。この運転支援装置100では、現在地からドライバにより設定された目的地に到着するまでの間、ドライバの運転操作を支援するために運転支援に応じて必要とされる減速停止支援信号などの各種信号を生成するようになっている。
【0039】
この運転支援装置100は、走行環境情報である交通情報としての交差点、同交差点に設けられた信号機、カーブ、前方車両や、天候等の周辺環境等に関する情報を取得する交通情報取得部110を備えている。この交通情報取得部110は、車両に搭載されて車両の周辺環境を撮像する車載カメラ111を備えている。車載カメラ111は、ルームミラーの裏側に設置された光学式のCCDカメラなどにより車両前方の所定範囲を撮像するとともに、撮像された撮像画像に基づく画像信号を交通情報認識部114に送信する。この交通情報認識部114は、車載カメラ111により撮像された画像信号に基づいて、前方の信号の状態(信号の灯色等)や前方の他車両の状態(車両のテールランプの点灯等)を抽出する。この抽出された前方の信号の状態や前方の他車両の状態に関する情報は、車両を運転するドライバに対する運転支援態様を決定する運転支援部140に送信される。そして、抽出された前方の信号の状態や前方の他車両の状態に基づいて車両が停止すべき状況であるか否かを判定して、停止すべき状況であると判定された場合、車両を停止させる運転支援が運転支援部140により行われる。
【0040】
インフラ通信装置112は、赤外線などの光信号により道路に設けられる光ビーコンアンテナ113と通信を行う通信装置である。この光ビーコンアンテナ113は、例えば信号機が設けられた交差点の手前数百メートルの位置に設置されている。光ビーコンアンテナ113は、交差点までの距離や交差点に設けられた信号機の信号サイクルや道路線形等
の情報をインフラ情報信号として送信する。そして、インフラ通信装置112は、光ビーコンアンテナ113から送信されるインフラ情報信号を受信するとともに、この受信したインフラ情報信号を上記交通情報認識部114と車両の位置に関する情報の演算が行われる車両位置演算部126とに送信する。またインフラ情報信号には、光ビーコンアンテナ113が設けられている道路の道路状況(交差点形状、曲率、勾配、車線数を含む)などこの道路に付随した付随情報や、地上設備等により検出された交差点周辺の他車両などの移動体情報も含まれる。
【0041】
また、インフラ通信装置112は、光ビーコンアンテナ113を介して、VICS(Vehicle Information and Communication System)センタから配信される道路交通情報を受信する。この道路交通情報には、例えば、渋滞区間、渋滞度等の渋滞情報、通行止め等の通行規制情報等が含まれる。
【0042】
こうして交通情報認識部114では、車載カメラ111やインフラ通信装置112によって取得された情報に基づき、車両前方の信号機の灯色の認識等といった車両の周辺環境の認識が行われる。
【0043】
また、運転支援装置100は、車両の位置情報を取得する車両位置取得部120を備えている。この車両位置取得部120は、GPS121及びカーナビゲーションシステム122や操舵角センサ123、ヨーレートセンサ124、車速センサ125などの各種センサによって構成されている。
【0044】
GPS121は、車両の絶対位置を検出するためのGPS衛星信号を受信するとともに、受信されたGPS衛星信号に基づき車両の位置を検出する。こうして、検出された車両の位置情報が上記車両位置演算部126に送信される。また、カーナビゲーションシステム122には車両の運転域に対応する道路地図データが登録されており、この道路地図データが車両位置演算部126に送信される。この道路地図データは、地図に関する情報であり、地図表示用データ、経路探索用データ、誘導データ(交差点名称・道路名称・方面名称・方向ガイド施設情報など)などから構成される。地図表示用データは、道路や道路地図の背景を表示するためのデータである。経路探索用データは、道路形状とは直接関係しない分岐情報などから成るデータであり、主に推奨経路を演算(経路探索)する際に用いられる。誘導データは、交差点の名称などから成るデータであり、演算された推奨経路に基づき運転者などに推奨経路を誘導する際に用いられる。また、道路地図データには、道路の形状、道路における交差点や横断歩道の情報などの道路付属情報が含まれている。具体的には、道路付属情報として、信号機が設けられた交差点の位置、一時停止位置、踏切、道路の道路形状、トンネル、横断歩道、事故多発地点、路面状態などの情報が含まれる。
【0045】
操舵角センサ123は、検出されたステアリングの操舵角の変化量に基づいて操舵角を算出するとともに、この算出された操舵角に応じた信号を車両位置演算部126に送信する。また、車速センサ125は、車輪の回転速度を検出するとともに、この検出された回転速度に応じた信号を車両位置演算部126に送信する。そして、ヨーレートセンサ124は、車両の旋回方向への回転角の変化する速度であるヨーレートを検出するとともに、この検出されたヨーレートに応じた信号を車両位置演算部126に送信する。
【0046】
こうして、車両位置演算部126では、インフラ通信装置112、GPS121、カーナビゲーションシステム122、操舵角センサ123、ヨーレートセンサ124、及び車速センサ125から送信された情報に基づき、自律慣性航法等の演算を通じて車両の位置情報が求められる。そして、この求められた車両の位置情報も、上記運転支援部140に送信される。
【0047】
また一方、運転支援装置100は、車両の減速量を検出する減速量検出部130を備えている。この減速量検出部130は、アクセルセンサ131、ブレーキセンサ132、加速度センサ(Gセンサ)133、及びジャイロセンサ134などの各種センサによって構成される。それら各センサ131〜134は、各センサ131〜134の検出結果に基づき車両の減速操作を数値化する減速行動演算部135に電気的に接続されている。
【0048】
アクセルセンサ131は、ドライバによるアクセルペダルの操作によって変化するアクセルの開度を検出するとともに、この検出されたアクセルの開度に応じた信号を減速行動演算部135に送信する。ブレーキセンサ132は、ドライバによるブレーキペダルの操作の有無を検出するとともに、この検出された操作の有無に応じた信号を減速行動演算部135に送信する。加速度センサ133は、車両の加速度を検出するとともに、この検出された加速度に応じた信号を減速行動演算部135に送信する。ジャイロセンサ134は、車両進行方向を検出するとともに、この検出された進行方向に応じた信号を減速行動演算部135に送信する。そして、減速行動演算部135では、各センサ131〜134から送信された情報に基づいて、ドライバにより行われた車両の減速操作が数値化される。こうして数値化された車両の減速操作に関する情報もまた、上記運転支援部140に送信される。
【0049】
なお、上記各種信号は、それぞれ所定の周期で運転支援装置100に送信されるようになっており、上記交通情報取得部110、車両位置取得部120、減速量検出部130は、上記伝達される各種信号に基づいて車両の位置、速度、方向等の現在状況を逐次算出することができるようになっている。
【0050】
一方、運転支援装置100には、車両のブレーキの制御等を行うブレーキ制御装置200と、車両のエンジンの制御等を行うエンジン制御装置210とが、CAN(Control Area Network)などの車載ネットワークを介してそれぞれ通信可能に接続されている。なお上記ブレーキ制御装置200及びエンジン制御装置210は、上記運転支援装置100と同様に、それぞれ各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。
【0051】
ブレーキ制御装置200は、各種センサからの信号に基づいて車両のブレーキ装置の制御を通じて当該車両に制動力を発生させる。具体的には、車速センサ125からの信号に基づいて把握される車両の速度、ブレーキセンサ132からの信号等に基づいて要求される制動力を算出してブレーキ装置を制御する。
【0052】
エンジン制御装置210は、車両のエンジンの運転制御を行う装置であって、アクセル踏込量を検出するアクセルセンサ131や吸入空気量を検出するセンサ等が接続されるとともに、スロットルバルブの駆動回路、燃料噴射弁の駆動回路等の各種機器の駆動回路が接続されている。そして、エンジン制御装置210は、上記各センサから入力した検出信号に基づいて把握されるエンジンの運転状態等を検知するとともに、上記各種機器の駆動回路の指令信号を出力する。こうしてエンジンの運転制御がエンジン制御装置210を通じて実施される。
【0053】
また、表示装置220は、例えば液晶ディスプレイによって構成され、車室内のセンターコンソール付近に設置される。この表示装置220には、運転支援装置100から地図表示の画像データが入力されたり、ドライバに対して注意を喚起するために運転支援装置100から出力された警告表示の画像データ等が入力され、各画像データに対応した画像
が表示される。例えば、運転支援装置100は、自車両の現在位置とその周辺の地図とを組み合わせた画像データを出力して、自車両の位置とその周辺の地図とが組み合わされた画像を表示装置に表示させる。このような構成により、表示装置220には、自車両の位置を表す自車位置マークや経路情報及び誘導情報などが道路地図とともに表示される。また、表示装置220は、VICSにより受信した交通情報、方向指示入力装置(方向指示器)及びステアリングの操舵角センサからの情報に基づいて、自車輌の進行路を判定し、進行路に関する交通規制情報を表示する。また、運転支援装置100には、運転支援にかかる警報などの各種情報を出力するための出力装置として音声装置230が電気的に接続されていている。この音声装置230では、運転支援装置100から送信される信号に基づいて、ドライバへの注意喚起や音声案内が行われる。
【0054】
そして、こうした各種装置に接続される運転支援装置100では、上記交通情報認識部114、車両位置演算部126、減速行動演算部135によって取得された交通情報、車両の位置情報、車両の減速量に関する情報が上記運転支援部140に取り込まれる。
【0055】
この運転支援部140に取り込まれた各情報は、それら各情報に基づきドライバ固有の操作態様を学習する減速行動学習部141に入力される。この減速行動学習部141では、交差点等の交通情報に応じてドライバが減速操作を行う地点、及び同地点でのアクセルオフ、ブレーキオン/オフといった減速操作、及び減速度等に関する情報の学習が行われる。なお本実施の形態では、運転支援に必要とされる要素として、車両の減速、停止が必要とされる地点においてドライバによる減速操作が開始されるタイミングが学習される。
【0056】
ドライバが減速操作を行う地点としては、例えば一時停止交差点、信号交差点、踏切、「右折あり」や「左折あり」等の警戒標識が設置される曲率半径の小さなカーブ等がある。そして、それら減速操作が行われる地点は、上述のカーナビゲーションシステム122の道路地図データやインフラ通信装置112にて取得される道路線形等の情報に予め記録されている。
【0057】
こうして減速行動学習部141は、ドライバにより過去に設定された目的地や曜日、時間帯に応じたドライバの行動パターン(走行パターン)を対応する交通情報毎に学習し、この学習した学習値を適宜データベース142に記録する。減速行動学習部141はまた、ドライバにより行われる通常の減速度を学習し、ドライバにより行われた減速操作が急減速であったか否かを判断する減速度判断部141aを備えている。また減速行動学習部141は、運転支援装置100による運転支援が実行されたときに追従する車両操作が行われたか否かを判断する追従性判断部141bを備えている。そして、それら減速度判断部141a及び追従性判断部141bによる判断結果も減速行動学習部141による学習値と併せてデータベース142に蓄積される。また本実施の形態では、データベース142は、一般のドライバの走行パターンに基づき交通情報毎に標準化された車両操作に関する情報が登録されている運転支援モデル142aを備えている。
【0058】
一方、上記交通情報認識部114、車両位置演算部126、減速行動演算部135によって取得された交通情報、車両の位置情報、車両の減速量に関する情報は、車両に対して次に行うべき運転支援態様である次期運転支援態様を決定する次期支援態様決定部143にも取り込まれる。この次期支援態様決定部143では、車両の減速操作が行われる際に、上記各装置200〜230を介した予備制動による車両の減速支援を行うタイミングが決定される。また、この次期支援態様決定部143では、減速支援タイミングの決定に際し、データベース142に学習されている交通情報毎の減速操作に関する情報の信頼性が判断され、信頼性が維持されている旨判断された情報に基づく減速支援タイミングの決定が行われる。すなわち本実施の形態では、この次期支援態様決定部143が車両操作に関する情報の学習値の信頼性を判断する判断手段として機能する。なお、信頼性が高い減速
操作に関する情報としては、例えば上記減速行動学習部141により学習され、データベース142に記録された回数が多い情報や、連続する交通情報のもとで行われた減速操作に関する情報同士の相関性(結び付き)が高い情報などが含まれる。またこの他、上記追従性判断部141bによる判断結果に基づき、運転支援装置100による運転支援が実行されたときのドライバによる追従の有無によっても、データベース142に記録する減速操作に関する情報の信頼性を判断することもできる。なお、本実施の形態では、こうした次期支援態様決定部143による信頼性の判断を通じて減速行動学習部141に学習された減速操作に関する情報の信頼性が低いと判断された場合には、上記運転支援モデル142aに予め登録されている標準化された通常の減速パターンに基づく減速支援が行われる。
【0059】
また、こうした次期支援態様決定部143は、上記データベース142に記録されたドライバの行動パターンに基づき現在地から目的地までに至るまでにドライバが走行する経路を予測する経路予測部143aを備えている。この経路予測部143aは、データベース142に記憶された車両の走行開始及び走行終了の位置や時間帯、走行経路等の情報から、その車両の類型的な走行パターンを抽出することができるようになっている。これにより、日頃から同じ走行経路を通って繰り返される走行パターンについては、エンジンの始動時の状況から、その後の走行経路を予測することができるようになっている。
【0060】
そして、こうした次期支援態様決定部143により減速支援タイミングが決定されると、このタイミングに基づく運転支援が上記ブレーキ制御装置200、エンジン制御装置210、音声装置230、表示装置220を介して実行される。この減速支援としては、例えば車両の進行方向前方に存在する交差点の手前でブレーキ制御装置200やエンジン制御装置210による予備制動を行う制御、表示装置220による視覚的な減速案内、音声装置230による音声案内等が行われる。また、上記経路予測部143aによって予測された予測結果に基づいて、現在地から目的地に至るまでの推奨経路の案内等が音声装置230や表示装置220を介して行われる。
【0061】
次に、このような運転支援装置100によって実行される車両操作の学習態様について図2〜図5を参照して説明する。なお、図2(a)は、交通情報としての交差点と車両との関係を示したものであり、図2(b)は、この交差点のもとで行われた減速操作の分布の一例を示したものである。
【0062】
図2(a)に示すように、自車両Cが、信号機A1を有する交差点Aに向って進行しているとする。なお、信号機A1には、インフラ装置を介して当該信号機A1の状態を通知する機能が設けられており、例えば同信号機A1の位置や信号サイクルが信号機A1の手前に設けられた光ビーコンアンテナ113により送信されている。これにより、車両Cは、インフラ通信装置112を介して信号機A1の状態を事前に把握することができるようになっている。なお、信号機にインフラ装置を介して通知する機能が設けられていない場合であっても、上記車載カメラ111などにより信号機A1の状態が認識される。
【0063】
そして、運転支援装置100による通常のタイミングによる減速支援では、前方の交差点Aの信号機A1が例えば赤現示とされていると、交差点Aの停止線A2から距離Tだけ手前の地点P1を車両Cが通過するタイミングで上記表示装置220や音声装置230を介してドライバに減速を促す案内が通知される。また、信号機A1が青現示であってもドライバが交差点Aで右折/左折しようとしているとき、すなわち交差点Aでの減速が必要になる際にも同様にドライバに対する減速案内が通知される。
【0064】
こうして、表示装置220や音声装置230を介した減速案内に追従する態様でアクセルオフやブレーキオンなどの減速操作がドライバにより実行される。そして、このドライ
バにあっては、図2(b)に特性L1として示すように、地点P1で減速案内が通知された場合、通常、空走期間Ta経過後に地点P2で減速操作が開始されることが最も多くなる。このような減速分布から、交差点Aにおいて信号機A1の手前の地点P1で減速支援が行われた場合には、上記空走期間Taを経て地点P2で減速操作が開始されると予測することができる。よって、このドライバに対する交差点Aでの減速支援は、車両Cが地点P1を通過するタイミングで実行することが好ましいと推定できる。なお、この図2(b)に特性L1として示した減速操作は、一般のドライバによって行われる標準的な減速操作を示すものでもあり、本実施の形態では、上記運転支援モデル142aに予め登録されている。また、上記空走期間Taも上記運転支援モデル142aに予め登録されている値であり、ドライバに減速案内が通知されてからドライバによる減速操作が行われるまでの一般的な反応速度を示す値である。
【0065】
ところで、こうしたドライバの減速操作による減速分布は1つではなく、図2(b)に特性L2及びL3として示すように、交差点Aに至るまでにドライバが積み重ねた経験、換言すれば、ドライバの心理状態によっても交差点(交通情報)に対する減速操作の分布形状である特徴量が変化する。すなわち、ドライバの減速分布は、交通環境、時間帯、天候等の各要素に起因して変化する傾向が強く、ドライバによる車両操作にはこうした各要素の影響が反映される。このため、地点P1にてドライバに対する減速案内を例えば特性L1に基づき一様に行ったとしても、ドライバの心理状態によっては減速支援が遅過ぎる、あるいは早過ぎると感じることもある。また、このような減速分布の特徴量はドライバ固有の癖によって変化することが多く、その都度変化するドライバ固有の癖に即した運転支援を行うことは困難である。
【0066】
そこで本実施の形態では、車両Cの運転域でドライバが積み重ねた経験に基づいた車両操作の学習を通じて、ドライバの意図を反映した運転支援を行うこととする。図3〜図5に、上記減速行動学習部141により学習されたドライバの減速操作の一例を示す。なお、図3(a)〜図5(a)は、車両Cとその運転域に存在する交通情報としての交差点との関係を模式的に示したものであり、図3(b)〜図5(b)は、各交差点のもとで行われた特徴量の異なる減速操作の分布の一例を示したものである。
【0067】
ここで、図3(a)に示すように、車両Cが、信号機A1を有する交差点Aとその交差点Aの先に連続する信号機B1を有する交差点Bとが進行方向に順に並ぶ道路を、交差点Aに向って進行しているとする。
【0068】
そして本実施の形態では、車両Cが連続する交差点A及びBを走行する際には、上記減速行動学習部141により、交通情報としての交差点Aにて行われた車両操作(減速操作)が交差点Aに関連付けて学習される。次いで、交差点Aにて車両操作が行われた際にドライバが積み重ねた経験が反映された車両操作として、交差点Aを通過した車両Cが交差点Bを通過したときに行われた車両操作が交差点Bに関連付けて学習される。
【0069】
そして、交差点Aに向かう車両Cのドライバに対して停止線A2よりも距離Tだけ手前の地点Pa1で減速案内が通知されたときの交差点Aにおける減速分布は、図3(b)に特性La1として示すように、減速操作の最多開始位置が地点Pa2となっている。また、後続する交差点Bにおいても、図3(b)に特性Lb1として示すように、信号機B1に対応する停止線B2よりも距離Tだけ手前の地点Pb1で減速案内が通知された場合、この減速案内に追従する減速操作の最多開始位置が上記地点Pa1に対応する地点Pb2となっている。
【0070】
すなわち、交差点Aにて行われた減速操作が通常のタイミングであり、ドライバにとって好ましい減速操作が行われたことから、後続する交差点Bにおいても特性La1と同様
の推移のもとに減速操作が行われている。こうしたことから、交差点Aにおいて通常の減速操作が行われた場合には、後続する交差点Bにおいても通常の減速操作が行われる傾向が強い、換言すれば、連続する交差点で行われる通常の減速操作同士の相関性が高いことが理解できる。そして、上記減速行動学習部141では、連続する交差点A及びBで行われる通常のタイミングによる減速操作同士の相関性が高いものとして、それら減速操作に関する情報が紐付けされる。なお、相関性が高い減速操作としては、連続する減速操作として紐付けされた回数が多い減速操作や、上記追従性判断部141bによる判断結果に基づき減速案内に追従したと判断された回数が多い減速操作、あるいは減速案内に追従しなかったと判断された回数が少ない減速操作が含まれる。また、相関性が低い減速操作としては、連続する減速操作として紐付けされた回数が少なく紐付けが不十分な減速操作や、上記追従性判断部141bによる判断結果に基づき減速案内に追従しなかったと判断された回数の多い減速操作が含まれる。
【0071】
そこで、上記次期支援態様決定部143では、交差点Aにて車両Cが地点Pa1で通知された減速案内に追従する減速操作が地点Pa2付近で開始された場合は、交差点Bにおける地点Pb2から上記空走期間Taを逆算した地点、ここでの例では地点Pb1に車両Cが到達するタイミングを交差点Bにて減速支援を行うべきタイミングとして決定する。
【0072】
次に、交差点A及びBにおいて学習された減速分布のうち、先の特性La1及びLb1とは特徴量が異なる減速分布を図4及び図5に示す。
すなわちここでの例では、図4(a)に示すように、通常の減速タイミングにより地点Pa1にてドライバに対する減速案内が通知されたとしても、図4(b)に特性La2として示すように、地点Pa1から先の空走期間Taよりも短い空走期間Tbが経過した地点Pa3で減速操作が開始される頻度が高くなっている。そしてドライバは、例えば交差点Aでの減速操作が早過ぎたという経験を積み重ねる。
【0073】
そして、こうした経験に基づきドライバは、図4(a)に示すように、後続する交差点Bでは通常よりも遅いタイミング、ここでの例では地点Pb3を通過するタイミングで、きつめのブレーキによる減速操作を開始するようになる。このため、交差点Bにおける減速分布(減速タイミング)は、図4(b)に特性Lb2として示すように、交差点Aにおける特性La2とは相反する推移(タイミング)となる。こうしたことから、交差点Aにおいて通常よりも早いタイミングで減速操作が行われた場合には、後続する交差点Bにおいては通常の減速操作よりも遅いタイミングで減速操作が行われる傾向が強い、換言すれば、それら連続する交通情報下で行われる減速操作の相関性が高いことが理解できる。そして、上記減速行動学習部141では、連続する交差点A及びBで行われる通常よりも早いタイミングによる減速操作と通常よりも遅いタイミングによる減速操作との相関性が高いものとして、それら減速操作に関する情報が紐付けされる。
【0074】
そしてこの場合には、交差点Bにて通常のタイミング(地点Pb1)で減速案内を通知したとしても、車両Cがこの地点Pb1から減速開始位置Pb3に到達する間での期間Tb1が上記空走期間Taよりも長く、そのときのドライバにとっては減速案内が通知されるタイミングが早過ぎるように感じられる。
【0075】
そこで、本実施の形態では、交差点Aにて減速操作が通常よりも早いタイミングで行われた場合には、後続する交差点Bでは、この交差点Bに関連付けて学習された減速分布に基づき、交差点Bにおける地点Pb3から上記空走期間Taを逆算した地点Pb4に車両Cが到達するタイミングを交差点Bにて減速支援を行うべきタイミングとして決定する。
【0076】
一方、図5(a)に示すように、通常の減速タイミングにより地点Pa1にてドライバに対する減速案内が通知されたとしても、図5(b)に特性La3として示すように、地
点Pa1から上記空走期間Taよりも長い空走期間Tcが経過した地点Pa4で減速操作が開始される頻度が高くなっている。そしてドライバは、例えば交差点Aでの減速操作が遅過ぎたという経験を積み重ねる。
【0077】
そして、こうした経験に基づきドライバは、図5(a)に示すように、後続する交差点Bでは通常よりも早いタイミング、ここでの例では地点Pb5を通過するタイミングで緩やかな減速操作を開始するようになる。このため、交差点Bにおける減速分布(減速タイミング)は、図5(b)に特性Lb3として示すように、交差点Aにおける特性La3とは相反する推移(タイミング)となる。こうしたことから、交差点Aにおいて通常よりも遅いタイミングで減速操作が行われた場合には後続する交差点Bにおいては通常の減速操作よりも早いタイミングで減速操作が行われる傾向が強い、換言すれば、それら連続する交通情報下で行われる減速操作の相関性が高いことが理解できる。そして、上記減速行動学習部141では、連続する交差点A及びBで行われる通常よりも遅いタイミングによる減速操作と通常よりも早いタイミングによる減速操作との相関性が高いものとして、それら減速操作に関する情報が紐付けされる。
【0078】
そしてこの場合には、交差点Bにて通常のタイミング(地点Pb1)で減速案内を通知したとしても、車両Cがこの地点Pb1から減速開始位置Pb5に到達する間での期間Tb2が上記空走期間Taよりも短く、そのときのドライバにとっては減速案内が通知されるタイミングが遅過ぎるように感じられる。
【0079】
そこで、本実施の形態では、交差点Aにて減速操作が通常よりも遅いタイミングで行われた場合には、後続する交差点Bでは、この交差点Bに関連付けて学習された減速分布に基づき、交差点Bにおける地点Pb5から上記空走期間Taを逆算した地点Pb6に車両Cが到達するタイミングを交差点Bにて減速支援を行うべきタイミングとして決定する。
【0080】
なお、こうした学習は上記交差点A及びBに限らず、一時停止交差点、信号交差点、踏切、交差点、「右折あり」や「左折あり」等の警戒標識が設置される曲率半径の小さなカーブ等の減速操作が必要となる交通情報毎に行われる。
【0081】
次に、こうした学習結果に基づき行われる減速支援タイミングの決定態様について図6〜図8を参照して説明する。なお、図6(a)〜図8(a)は、車両Cとその運転域に存在する交通情報としての交差点A及びBとの関係を模式的に示したものであり、図6(b)〜図8(b)は、交差点Aで行われた減速操作の実績に基づいて決定される交差点Bでの減速支援タイミングの一例を示したものである。
【0082】
まず、図6(a)に示すように、例えば信号機A1が赤現示とされている交差点Aにおいて、通常のタイミングta1による減速操作が行われたとする。そして、交差点Aを通過した車両Cが交差点Bに向かうときに信号機B1が赤現示である場合、上記運転支援装置100による減速支援が実行される。この減速支援に際しては、交差点Aで実際に減速操作が行われたタイミングta1に基づき、図6(b)に示すように、交差点Bでの減速操作として上記データベース142に学習されている減速タイミング情報Tbm1〜Tbm3のうち、相関性が最も高い学習値が選択される。ここでの例では、交差点Aで実際に行われた減速タイミングta1に基づき通常の減速タイミングTbm1が選択され、車両Cが先の地点Pb1を通過するタイミングtb1にて上記表示装置220や音声装置230による減速案内が通知される。こうして、空走期間Ta経過後、車両Cが先の地点Pb2を通過するタイミングtb2にてドライバによる減速操作が開始され、タイミングt0にて車両Cが停止線B2の手前で停止する。
【0083】
また、図7(a)に示すように、例えば信号機A1が赤現示とされている交差点Aにお
いて、通常よりも早いタイミングta2による減速操作が行われたとする。そして、この交差点Aで実際に行われた減速タイミングta2に基づき、図7(b)に示すように、相関性が最も高い減速タイミング情報Tbm2が交差点Bにて減速支援を行うための学習値として選択される。こうして、車両Cが先の地点Pb4を通過するタイミングtb4にて上記表示装置220や音声装置230による減速案内が通知される。これにより、空走期間Ta経過後、車両Cが先の地点Pb3を通過するタイミングtb3にてドライバによる減速操作が開始され、タイミングt0にて車両Cが停止線B2の手前で停止する。
【0084】
一方、図8(a)に示すように、例えば信号機A1が赤現示とされている交差点Aにおいて、通常よりも遅いタイミングta3による減速操作が行われたとする。そして、この交差点Aで実際に行われた減速タイミングta3に基づき、図8(b)に示すように、相関性が最も高い減速タイミング情報Tbm3が交差点Bにて減速支援を行うための学習値として選択される。こうして、車両Cが先の地点Pb6を通過するタイミングtb6にて上記表示装置220や音声装置230による減速案内が通知される。これにより、空走期間Ta経過後、車両Cが先の地点Pb5を通過するタイミングtb5にてドライバによる減速操作が開始され、タイミングt0にて車両Cが停止線B2の手前で停止する。
【0085】
このように、本実施の形態では、前回の減速地点で行われた減速操作と次の減速地点に学習されている減速操作に関する情報とに基づいて次の減速地点で行われる減速操作を予測し、この予測のもとに減速案内が通知される。これにより、連続する減速地点のもとでドライバが積み重ねた経験に応じた減速案内が行われるようになり、その都度変化するドライバの心理に即した減速操作が実現されるようになる。
【0086】
以下、このような前提のもとに行われる上記運転支援部140による運転支援手順を図9を参照して詳述する。
まず、運転支援装置100に対して目的地が設定され、ドライバによる車両操作が開始されると、ステップS100において、上記車両位置演算部126及び上記交通情報認識部114により、車両Cの現在地(位置情報)及び車両C周辺の交通情報が取得される。そして、それら取得された位置情報及び交通情報に基づいて、道路環境に応じて減速操作が行われる地点(交通情報)、例えば一時停止交差点、信号交差点、踏切、交差点、「右折あり」や「左折あり」等の警戒標識が設置されている曲率半径の小さなカーブ等に車両Cが接近しているか否かが判断される(ステップS101)。
【0087】
こうして、減速操作が行われる地点に車両Cが接近していないと判断されると、上記減速行動学習部141によって学習処理が実行されることにより、ドライバにより行われた車両操作が上記取得された交通情報に関連付けて学習される(ステップS101:NO、S102)。
【0088】
一方、減速操作が行われる地点に車両Cが接近したことによりドライバによる減速操作が行われたと判断されると、この地点(交通情報)にドライバによる車両操作が学習されているか否かが上記データベース142の参照を通じて判断される(ステップS101:YES、ステップS103、S104)。こうして、運転支援の対象とする交通情報に学習された車両操作に関する情報が関連付けられていれば、この車両操作に基づく減速支援タイミングの決定やこの決定されたタイミングでの減速案内といった通知処理が実行される(ステップS104、S105、)。そして、そのときに行われたドライバによる車両操作に関する情報が学習されるとともに、この車両操作が減速案内に対して追従していたか否かが併せて学習される(S102)。
【0089】
一方、減速操作が行われる地点に車両Cが接近したとしても、例えば交通情報としての交差点に設けられた信号機が青現示であり、同交差点を直進したために減速操作が行われ
なかった場合にも、ドライバによって行われた車両操作に関する情報が上記取得された位置情報及び交通情報に関連付けて学習される(ステップS103:NO、S102)。また、運転支援の対象とする交通情報に車両操作に関する情報が学習されていない場合にも同様に、ドライバによって行われた車両操作が上記取得された位置情報及び交通情報に関連付けて学習される(ステップS104:NO、S102)。
【0090】
次に、上記減速行動学習部141によって実行される学習処理について図10を参照して説明する。
この学習処理では、ドライバによるアクセルオフやブレーキオン等の減速操作が行われると、この減速操作が開始されたタイミングが上記各センサ131〜134等の検出結果に基づき解析される(ステップS200、S201)。この解析により、例えば減速操作が通常のタイミングであったか否かなどが解析される。次いで、この解析された減速操作とこの減速操作が行われた地点(交通情報)とが関連付けられた情報が上記データベース142に蓄積されるとともに、その蓄積回数がカウントされる(ステップS202)。
【0091】
こうして減速操作が解析されると、当該減速操作が行われた地点が、上記カーナビゲーションシステム122の地図情報やデータベース142に減速操作が行われる交通情報として登録されているか否かが判断される(ステップS203)。この結果、減速操作が行われた地点が未登録であり、これまでに上記データベース142に減速地点と当該地点での減速操作とが蓄積されている回数がL回未満であれば、車両Cが走行する頻度が少ない経路での減速操作として判断される(ステップS203:NO、S204:NO)。このため、この判断対象とされた地点を、同地点のもとで行われる減速操作に関する情報を学習すべき地点として登録することなく本学習処理が終了する。また、減速操作が行われた地点が未登録であっても、上記カウントされる蓄積回数がL回以上であれば、この地点が同地点のもとで行われる減速操作を学習すべき地点として登録される(ステップS204:YES、S205)。このように本実施の形態では、減速操作が必要な地点として地図情報やデータベース142に登録されていない地点であっても、ドライバによる減速操作が行われる頻度に基づいて新たな減速地点として適宜追加されるようになる。
【0092】
一方、減速操作が行われた地点が上記カーナビゲーションシステム122の地図情報やデータベース142に減速操作が行われる交通情報として既に登録されており、上記蓄積回数がM回(M>L)以上であれば、その地点でのドライバ固有の減速操作パターンの学習が完了する(ステップS203:YES、S206:YES、S207)。
【0093】
そして、続くステップS208では、上記判断の対象とされた減速地点の直前に存在する減速地点、例えば先の図3〜図8に示した交差点Bの直前の減速地点である交差点Aにて減速操作が行われていたか否かが判断される。この結果、直前の減速地点でも減速操作が行われていた場合には、直前の減速地点(例えば交差点A)で行われた減速操作に関する情報と上記判断の対象とされた減速地点(例えば交差点B)で行われた減速操作に関する情報とが紐付けされて上記データベース142に蓄積される(ステップS208:YES、S209)。
【0094】
こうして、学習の対象とする地点での各々紐付けられた減速操作に関する情報の蓄積回数がN(N≧M>L)回以上となると、学習対象とする地点に登録される減速操作の紐付けが完了したとして本学習処理が終了する(ステップS211)。なお、本実施の形態では、このように減速地点毎に学習が完了された減速操作に関する情報であっても、例えば上記追従性判断部141bによる判断の結果、この学習された情報に基づく減速案内にドライバが追従しなかった場合、あるいは、追従しない頻度が増えた場合には、その減速操作に関する情報を修正すべき情報として再度の学習が行われる。これにより、ドライバに対する減速支援を行う上で、追従の無い減速操作が行われたときの減速操作に関する情報
の影響が抑制されるようになり、ドライバの意図がより反映された減速操作に関する情報の学習が可能となる。
【0095】
次に、上記運転支援部140によって実行される減速案内の通知処理について図11を参照して説明する。
この通知処理ではまず、先の図9のステップS105に示したように、減速操作が学習されている減速地点でドライバによる減速操作が行われたとすると、当該減速操作が行われる前に行われた減速操作が通常の減速タイミングであるか否かが判断される(ステップS300)。そして、前回行われた減速操作が通常の減速タイミングであった場合は、例えば先の図3、図6に示したように、前回の減速地点に関連付けて学習されている減速分布のうちの通常の減速分布に基づいて減速支援タイミングが選択される(ステップS300:NO、S301、S307)。
【0096】
一方、前回行われた減速操作が通常の減速タイミングではない場合には、前回の減速操作が行われてから所定の時間T1が経過しているか、もしくは、所定の距離T1を走行しているか否かが判断される(ステップS302)。そして、所定の時間T1が経過している場合、もしくは所定の距離T1を走行している場合は、前回の減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が小さいとして、通常の減速分布に基づく減速支援タイミングが選択される(ステップS302:NO、S301、S307)。
【0097】
また、前回の減速操作が行われてからの経過時間が時間T1未満、もしくは移動距離が距離T1未満である場合には、前回の減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が大きいとして、次の減速地点での減速操作に関する情報と前回の減速地点での減速操作に関する情報との紐付けが完了しているか否かが判断される(ステップS302:YES、S303)。
【0098】
この結果、各情報の紐付けが完了していないと判断された場合は、上記学習された減速操作に関する情報の信頼性が低いものとして、通常の減速分布に基づいて減速支援タイミングが選択される(ステップS303:NO、S301、S307)。
【0099】
一方、各情報の紐付けが完了していると判断された場合は、上記学習された減速操作に関する情報の信頼性が高いものとして、学習された減速操作に関する情報に基づいて減速支援タイミングが選択される(ステップS303:YES)。この減速支援タイミングの選択に際しては、前回行われた減速操作が通常よりも早いタイミングによる減速タイミングであった場合には、例えば先の図4、図7に示したように、通常のタイミングよりも早い減速分布に基づいて減速支援タイミングが決定される(ステップS304:NO、S305、S307)。一方、前回行われた減速操作が通常よりも遅いタイミングによる減速タイミングであった場合には、例えば先の図5、図8に示したように、通常のタイミングよりも遅い減速分布に基づいて減速支援タイミングが決定される(ステップS304:YES、S306、S307)。すなわち、前回行われた減速操作と相反するタイミングが次の減速支援タイミングとして選択される。
【0100】
こうして、前回の減速操作に応じた減速支援タイミングが決定されると、ドライバが次の減速地点で減速操作を開始しているか否かが判断され、既にドライバによる減速操作が開始されていれば、運転支援装置100による減速支援が不要であるとして本通知処理が終了する(ステップS308:NO)。一方、ドライバによる減速操作が行われていない場合には、各々決定された減速支援タイミングで上記表示装置220や音声装置230による減速案内が通知される(ステップS308:YES、S309)。こうして、その都度変化するドライバの意図に即した減速案内が通知されるようになる。
【0101】
以上説明したように、本実施の形態にかかる運転支援装置によれば、以下の効果が得られるようになる。
(1)車両Cの運転域においてドライバによる連続した車両操作が行われる過程で、交差点や一時停止位置等の減速地点毎にドライバにより行われた減速操作を学習した。そして、この学習を通じて連続する減速地点間で行われた減速操作に関する情報を紐付け、この紐付けされた情報とドライバにより行われた減速操作とに基づいて次の減速地点で実行すべき減速支援態様を決定することとした。このため、前回行われた減速操作から次に行われる減速操作を経験的に予測することができるようになり、この予測に基づく減速支援を行うことができるようになる。これにより、車両操作が行われる過程でドライバが積み重ねた経験によりドライバによる走行パターンが変化したとしても、そのときのドライバの心理に即した減速支援を行うことができるようになる。
【0102】
(2)次に行われる減速支援を、その直前に行われた減速操作に基づき決定することとした。これにより、ドライバの心理が最も反映された車両操作に基づく減速支援を行うことができるようになる。
【0103】
(3)次に行われる減速支援を、その直前に行われた車両操作との相関性に基づいて決定することとした。これにより、減速支援の対象とする減速地点で行われる減速操作を高い信頼性のもとに予測することができるようになる。
【0104】
(4)上記学習された減速操作に関する情報に基づく減速支援の要否を、前回の減速操作が行われてからの経過時間もしくは移動距離に基づき判断することとした。このため、前回の減速操作で積み重ねた経験が次の減速操作に反映される可能性が高いときに限って上記学習された減速操作に関する情報に基づく減速支援が実行されるようになる。
【0105】
(5)上記運転支援に必要とされる要素として減速操作が行われるタイミングを学習し、この学習結果から特徴量が異なる3つの減速分布、すなわち通常のタイミングによる減速分布、通常よりも早いタイミングによる減速分布、通常よりも遅いタイミングによる減速分布を作成した。このため、前回行われた減速操作のタイミングと各々作成された減速分布との照合を通じて次に行われる減速操作を予測することができるようになり、次の減速地点での減速支援態様を容易に選択することができるようになる。
【0106】
(6)上記追従性判断部141bによる判断の結果、この学習された情報に基づく減速案内にドライバが追従しなかった場合、あるいは、追従しない頻度が増えた場合には、その減速操作に関する情報を修正すべき情報として再度の学習を行うこととした。これにより、ドライバに対する減速支援を行う上で、追従の無い減速操作が行われたときの減速操作に関する情報の影響が抑制されるようになり、ドライバの意図がより反映された減速操作に関する情報の学習が可能となる。
【0107】
(7)上記学習される操作態様に関する情報として各交通情報下での車両の減速操作に関する情報を学習し、次期運転支援態様の決定を車両Cの減速操作に基づく減速支援タイミングの決定として行うこととした。これにより、ドライバ固有の癖が特に反映されやすい減速パターンを学習することができるようになり、ひいては、ドライバ固有の癖に応じた減速支援を行うことができるようになる。
【0108】
(8)次に実行される減速支援タイミングとして、前回行われた減速操作と相反するタイミングを選択することとした。これにより、前回の車両操作の際にドライバが積み重ねた経験に対応する減速支援を容易に行うことができるようになる。
【0109】
(9)上記減速操作が行われる地点の学習に際し、減速操作が必要な地点としてカーナ
ビゲーションシステム122の地図情報やデータベース142に登録されていない場所であっても、減速操作が所定回数(L回)以上行われることを条件に減速地点として登録することとした。これにより、実際のドライバの減速操作に基づいて減速支援が必要とされる地点を適宜学習することができるようになり、減速支援可能な範囲がドライバによる車両操作の実績に基づいて拡張されるようになる。また、減速操作が所定回数(L回)以上行われることを条件に減速地点として登録することにより、ドライバによる減速操作が行われる頻度が高い減速地点のみを学習することができるようになる。これにより、必要最小限の情報量に基づく運転支援が可能となる。
(10)減速操作が必要となる交差点等の交通情報を、車載カメラ111、インフラ通信装置112、カーナビゲーションシステム122の地図情報等を用いて取得することとした。これにより、車両の減速操作が必要となる減速地点の認識を的確に行うことができるようになり、ひいては、この認識に基づく減速支援にかかる信頼性が高められるようになる。
【0110】
(第2の実施の形態)
次に本発明にかかる運転支援装置を具体化した第2の実施の形態について図12〜図15を参照して説明する。なお、本実施の形態の運転支援装置は、ドライバにより行われた減速操作の減速度も加味して次期運転支援態様を決定するものであり、その基本的な構成は先の第1の実施の形態と共通したものとなっている。以下、本実施の形態の運転支援装置について図12〜図15を参照して説明する。
【0111】
ここで、図12(a)に示すように、車両Cが、例えば交差点等の減速地点での通常のタイミングによる減速操作、あるいは通常よりも遅めのタイミングによる減速操作を終えて、信号機B1を有する交差点Bに向って進行しているとする。そして、車両C1が交差点Bに向かう途中で進行方向前方の車両C2が駐車場Pに進入するために急減速し、右折した場合には、前方の車両C2との接触を回避すべく、図12(b)に示すように、自車両C1のドライバによる急減速操作が行われる。このため、車両C1のドライバは、以後の車両操作では通常よりも慎重な車両操作を行うようになり、例えば信号機B1が青現時となっている交差点Bを右折する際には、通常よりも早いタイミングで余裕を持った減速操作を開始するようになる。すなわち、このような突発的な急減速が行われた場合には、ドライバの心理は、交差点Bの直前に存在する減速地点で減速操作が行われたときから変化しており、前回の減速地点のもとで行われた減速操作に基づいて交差点Bでの減速支援態様を決定したとしてもドライバの心理に即した減速支援が行われるとは限らない。
【0112】
そこで本実施の形態では、連続する減速地点の途中でドライバによる急減速操作が行われた場合には、この急減速操作を基準として次の減速地点での減速支援態様を決定することとする。
【0113】
以下、本実施の形態による減速操作に関する情報の学習処理について先の図10に対応する図として図13を参照して説明する。
この学習処理ではまず、ステップS200においてドライバによるアクセルオフやブレーキオン等の減速操作が行われると、この減速操作が開始されたタイミングや減速度が上記各センサ131〜134等の検出結果に基づき解析される(ステップS201)。そして、ドライバによる減速操作が行われる都度こうした解析が行われることにより、減速支援の対象とするドライバが通常の減速操作を行うときの減速度が学習される(ステップS201A)。この学習により、例えば最も高い頻度で行われた減速操作の減速度がドライバによる通常の減速度として減速度として学習される。そして、本実施の形態では、この通常の減速度を基準にドライバによる減速度が急減速(急ブレーキ)であったか否かなどの判断が上記減速度判断部141aにより行われる。こうして通常の減速度が学習されると、先の図10のステップS202〜S211と同様に減速地点の登録や減速操作に関す
る情報の紐付け等が実行される。
【0114】
次に、本実施の形態による減速案内の通知処理について先の図11に対応する図として図14及び図15を参照して説明する。
まず、図14に示すように、減速操作が学習されている減速地点でドライバによる減速操作が行われたとすると、当該減速操作が行われる前に行われた減速操作が通常の減速タイミングであるか否かが判断される(ステップS300)。そして、先の図11のステップS301〜S307と同様に、この前回行われた減速操作のタイミングに基づき次の減速地点で実行する減速支援タイミングが決定される(ステップS301〜S307)。
【0115】
ここで、本実施の形態では、図15に示すように、前回の減速地点から次の減速地点に至る途中で、前方を走行する車両の急減速等といった走行環境に起因してドライバによる急減速が行われたか否かが判断される(S307A)。すなわち、前回の減速地点から次の減速地点に至る途中で行われた減速操作の減速度が、先の学習処理において学習された通常の減速度よりも急であるか否かが判断される。
【0116】
そして、次の減速地点に向かう途中で急減速操作が行われた場合には、急減速操作が行われてから所定の時間T2が経過しているか、もしくは、所定の距離T2を走行しているか否かが判断される(ステップS307B)。
【0117】
この結果、急減速操作が行われてからの経過時間が時間T2未満、もしくは移動距離が距離T2未満である場合には、急減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が大きいとして、通常のタイミングよりも遅い減速分布に基づき減速支援タイミングが再選択される(ステップS307B:YES、S307C)。そして、ステップS307において一旦決定された減速支援タイミングが上書きされる(ステップS307D)。一方、所定の時間T2が経過している場合、もしくは所定の距離T2を走行している場合は、これまでの減速操作が行われたときのドライバの心理が次の減速操作に及ぼす影響が小さいとして、通常の減速分布に基づいて減速支援タイミングが再選択される(ステップS307B:NO、S307E)。そしてこの場合にも、ステップS307において一旦決定された減速支援タイミングが上書きされる(ステップS307F)。
【0118】
このように次の減速地点に向かう途中で急減速が発生した場合には、各々上書きされた減速支援タイミングとなったときに、上記表示装置220や音声装置230による減速案内がドライバに対して通知される(ステップS307A:YES、ステップS308、309)。また、次の減速地点に向かう途中で急減速が行われなければ、先のステップS307において各々決定された減速支援タイミングになったときに、上記表示装置220や音声装置230による減速案内がドライバに対して通知される(ステップS307A:NO、S308、309)。
【0119】
このように本実施の形態では、前回の減速地点から次の減速地点に向かう途中で急減速が発生した場合には、前回の減速地点で行われた減速操作よりもその後に行われた急減速操作がドライバの心理に与える影響が大きいとして、一旦決定された減速支援タイミングが上書きされるようになる。
【0120】
以上説明したように、本実施の形態にかかる運転支援装置によれば、前記(1)〜(10)に示した効果が得られるとともに、さらに以下の効果が得られるようになる。
(11)連続する減速地点の間で急減速操作が行われた場合には、前回の減速操作に関する情報に基づき一旦選択された減速支援タイミングを上書きすることとした。これにより、急減速が発生したことによりドライバの心理が前回の減速操作が行われたときから変化したとしても、ドライバの心理に応じた減速支援が行われるようになる。
【0121】
(12)また、このように急減速が発生したか否かを基準として減速支援タイミングを決定することにより、次の減速地点での減速支援態様を容易に決定することができるようになる。
【0122】
(他の実施の形態)
なお、上記各実施の形態は、以下のような形態をもって実施することもできる。
・上記各実施の形態では、前回の減速地点で行われた減速操作に基づいて次の減速地点での減速支援態様を決定することとした。これに限らず、次の減速地点に向かう途中で走行環境に起因する急減速操作が行われたか否かのみを基準として次の減速地点での減速支援態様を決定するようにしてもよい。これにより、たとえ次の減速地点での減速操作に関する情報の学習や紐付けが完了していなかったとしても、急減速の発生の有無のみを基準として次の減速地点での減速支援態様を決定することができるようになる。これにより、学習支援態様を容易に決定することができるようになるとともに、減速支援可能な範囲が拡張されるようになる。
【0123】
・上記各実施の形態では、減速操作が行われた地点を新たな減速地点として登録する条件として、上記データベース142に蓄積された回数がL回以上蓄積されたことを条件とした。これに限らす、ドライバによる減速操作が行われた地点の全てを減速地点としてデータベース142に登録し、この減速地点のもとで行われる減速操作に関する情報を適宜学習するようにしてもよい。
【0124】
・上記各実施の形態では、次の減速支援タイミングとして、前回行われた減速操作と相反するタイミングを選択することとした。これに限らず、次の減速支援タイミングとしてはドライバ固有の癖が反映されたタイミングであればよく、前回行われた減速操作と同様のタイミングによる減速支援を行うこととしてもよい。
【0125】
・上記各実施の形態では、上記運転支援モデル142aに予め登録されている減速操作に関する情報(減速分布)とは別途にドライバ固有の減速操作に関する情報を学習することとした。これに限らず、先の図1に対応する図として例えば図16に示すように、減速行動学習部141として、上記運転支援モデル142aに登録されている標準的な車両操作と実際に行われた車両操作との差分であるずれ量を学習するずれ量学習部141cを備える構成としてもよい。この場合には、例えば上記ずれ量学習部141cにより学習されたずれ量を適宜記録するずれ量記録部142bをデータベース142に設ける。また次期支援態様決定部143に、このずれ量記録部142bに記録されているずれ量と前回行われた車両操作とに基づき運転支援モデル142aに登録されている標準的な車両操作に関する情報を適宜補正して次の運転支援態様として出力する補正部143bを設ける。これにより、既存の運転支援モデル142aを適宜補正することによりドライバ固有の癖に即した運転支援を行うことができるようになり、より少ないデータ量に基づく運転支援が実現されるようになる。
【0126】
・上記各実施の形態では、上記減速行動学習部141に追従性判断部141bを備える構成としたが、この追従性判断部141bを割愛する構成としてもよい。そして、減速行動学習部141による学習として、交通情報下で行われた車両の操作態様に関する情報のみを学習するようにしてもよい。
【0127】
・上記各実施の形態では、上記データベース142として上記運転支援モデル142aを備える構成とし、この運転支援モデル142aに予め登録されている標準的な減速パターンを運転支援の対象とするドライバの通常の減速分布として用いることとした。これに限らず、上記減速行動学習部141により学習された情報に基づき、例えば最も高い頻度
で行われる減速操作(減速タイミング)の分布をそのドライバによる通常の減速分布として用いるようにしてもよい。
【0128】
・上記各実施の形態では、前回の減速操作が行われてからの経過時間が時間T1、T2未満、もしくは移動距離が距離T1、T2未満であるときに、前回の減速操作を反映させるかたちで次の減速支援態様を決定することとした。これに限らず、前回の減速操作が行われてからの経過時間が時間T1、T2未満であり、かつ移動距離が距離T1、T2未満であるときに前回の減速操作を反映させるかたちで次の減速支援態様を決定するようにしてもよい。
【0129】
・また、減速支援態様の決定に限らず、前回の車両操作からの経過時間が所定時間以内であることや前回の車両操作からの移動距離が所定距離以内であることを条件に、減速地点毎の減速操作に関する情報の学習を行うようにしてもよい。これにより、ドライバ固有の連続的な走行パターンを高い精度のもとに学習することができるようになる。
【0130】
・上記各実施の形態では、要素毎に特徴量が異なる複数の操作態様として通常の減速分布、通常よりも早い減速分布、通常よりも遅い減速分布に分類し、それら3つの減速分布に基づいて通常のタイミングでの減速支援、通常よりも遅いタイミングでの減速支援、通常よりも早いタイミングでの減速支援を行うこととした。これに限らず、上記減速行動学習部141による学習として、例えば時間帯、天候、車両の総重量、乗車人数等のドライバによる車両操作態様に影響を与える各要素を減速操作に関する情報に紐付けて学習し、それら要素毎にさらに細分化された減速分布を減速地点毎に関連づけて学習するようにしてもよい。そして、前回の減速操作とそのときの天候、車両の総重量、乗車人数等の情報とに基づき上記細分化された減速分布を参照し、次の減速地点での減速支援を決定するようにしてもよい。これにより、ドライバ固有の減速操作に関する情報のより細やかな学習ができるようになり、この学習された情報に基づく細やかな減速支援が行われるようになる。
・また、この要素として車両を運転するドライバを特定し、この特定されたドライバ毎に減速操作に関する情報を学習するようにしてもよい。これにより、運転支援の対象とするドライバが変更されたとしても、この変更されたドライバの固有の減速操作に即した運転支援が行われるようになる。
・上記各実施の形態では、運転支援装置100による運転支援として、表示装置220及び音声装置230を介した減速案内を行うこととした。これに限らず、各々選択されたタイミングに基づいて上記ブレーキ制御装置200やエンジン制御装置210による予備制動を行うようにしてもよい。
【0131】
・上記各実施の形態では、ドライバによる車両操作に関する情報として減速操作に関する情報を学習し、次期運転支援態様の決定としてドライバによる減速操作に基づく車両の減速支援タイミングの決定として行うこととした。これに限らず、ドライバによる車両操作に関する情報としては、ドライバ固有の走行パターンが反映されるものであればよく、例えば右折操作や左折操作等に関する情報を学習し、この学習された情報に基づき次期運転支援態様を決定するようにしてもよい。
【0132】
・上記各実施の形態では、減速支援が行われる交通情報として交差点で行われる減速支援を例示したが、減速支援の対象となる地点(場所)とは、ドライバ固有の減速操作が反映される地点であればよく、この他、踏切やカーブ、駐車場等であってもよい。
【0133】
・上記各実施の形態では、減速操作が必要となる交差点等の交通情報を、車載カメラ111、インフラ通信装置112、カーナビゲーションシステム122の地図情報等を用いて取得することとした。この他、例えば車両間通信システムや路車間通信システムを通じ
て上記交通情報を取得するようにしてもよい。要は、交差点に設けられた信号機の現示(灯色)状態や、踏切、標識等に関する交通情報を取得可能なものであればよく、いずれの手段を用いて交通情報を取得するかは任意である。
【符号の説明】
【0134】
A1、B1…信号機、A、B…交差点、C、C1、C2…車両、100…運転支援装置、110…交通情報取得部、111…車載カメラ、112…インフラ通信装置、113…光ビーコンアンテナ、114…交通情報認識部、120…車両位置取得部、121…GPS、122…カーナビゲーションシステム、123…操舵角センサ、124…ヨーレートセンサ、125…車速センサ、126…車両位置演算部、130…減速量検出部、131…アクセルセンサ、132…ブレーキセンサ、133…加速度センサ、134…ジャイロセンサ、135…減速行動演算部、140…運転支援部、141…減速行動学習部、141a…減速度判断部、141b…追従性判断部、141c…ずれ量学習部、142…データベース、142a…運転支援モデル、142b…ずれ量記録部、143…次期支援態様決定部(判断手段)、143a…経路予測部、143b…補正部、200…ブレーキ制御装置、210…エンジン制御装置、220…表示装置、230…音声装置。
【特許請求の範囲】
【請求項1】
走行環境情報である交通情報に基づき車両の運転を支援する運転支援装置において、
前記車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習し、前記運転域での車両操作が行われる都度、そのときの交通情報に対応して次に実行すべき運転支援態様である次期運転支援態様を該当する交通情報に関連付けして学習した情報に基づき決定する
ことを特徴とする運転支援装置。
【請求項2】
前記次期運転支援態様が決定される前記運転域での車両操作が、前記該当する交通情報の直前に行われた車両操作である
請求項1に記載の運転支援装置。
【請求項3】
前記次期運転支援態様として前記該当する交通情報に関連付けして学習した操作態様に関する情報に基づき決定される操作態様が、同該当する交通情報の直前に行われた車両操作から予測される操作態様である
請求項2に記載の運転支援装置。
【請求項4】
前記学習の要否、及び前記学習された操作態様に関する情報に基づく運転支援の要否、の少なくとも一方が、前記該当する交通情報の直前に行われた車両操作から前記該当する交通情報に至るまでの経過時間及び移動距離の少なくとも一方に基づき判断される
請求項2または3に記載の運転支援装置。
【請求項5】
前記学習は、前記運転支援に必要とされる要素毎に特徴量の異なる複数の操作態様に関する情報を対象として行われる
請求項1〜4のいずれか一項に記載の運転支援装置。
【請求項6】
前記学習は、前記車両の運転支援が実行されたときの車両操作の追従の有無を加味し、追従の無い車両操作が行われたときの操作態様に関する情報の影響を抑制するかたちで行われる
請求項1〜5のいずれか一項に記載の運転支援装置。
【請求項7】
請求項1〜6のいずれか一項に記載の運転支援装置において、
前記交通情報毎に前記操作態様を標準化した運転支援モデルをさらに備え、
前記学習は、各該当する交通情報での前記運転支援モデルと実際に行われた車両操作とのずれ量の学習として行われ、前記次期運転支援態様の決定は、この学習されたずれ量に基づく前記運転支援モデルの補正として行われる
ことを特徴とする運転支援装置。
【請求項8】
請求項1〜6のいずれか一項に記載の運転支援装置において、
前記交通情報毎に前記操作態様を標準化した運転支援モデルと、前記車両の運転支援が実行されたときの車両操作の追従態様に基づいて前記学習された情報の信頼性を判断する判断手段とをさらに備え、
前記学習は、前記各交通情報下で検出された操作態様そのものを交通情報毎に関連付ける態様で行われ、前記次期運転支援態様の決定は、各該当する交通情報での前記判断手段により信頼性が維持されている旨判断されている操作態様と前記運転支援モデルとのいずれかの選択として行われる
ことを特徴とする運転支援装置。
【請求項9】
前記学習される操作態様に関する情報は、前記各交通情報下での車両の減速操作に関す
る情報であり、前記次期運転支援態様の決定は、当該車両の減速操作に基づく車両の減速支援タイミングの決定として行われる
請求項1〜8のいずれか一項に記載の運転支援装置。
【請求項10】
前記次期運転支援態様として決定される前記車両の減速支援タイミングは、前記該当する交通情報の直前に行われた車両の減速操作のタイミングと相反するタイミングに設定される
請求項9に記載の運転支援装置。
【請求項11】
前記交通情報は、車載用のカーナビゲーションシステム、及び車載カメラ、及び車両間通信システム、及び路車間通信システムの少なくとも1つを通じて取得される
請求項1〜10のいずれか一項に記載の運転支援装置。
【請求項1】
走行環境情報である交通情報に基づき車両の運転を支援する運転支援装置において、
前記車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習し、前記運転域での車両操作が行われる都度、そのときの交通情報に対応して次に実行すべき運転支援態様である次期運転支援態様を該当する交通情報に関連付けして学習した情報に基づき決定する
ことを特徴とする運転支援装置。
【請求項2】
前記次期運転支援態様が決定される前記運転域での車両操作が、前記該当する交通情報の直前に行われた車両操作である
請求項1に記載の運転支援装置。
【請求項3】
前記次期運転支援態様として前記該当する交通情報に関連付けして学習した操作態様に関する情報に基づき決定される操作態様が、同該当する交通情報の直前に行われた車両操作から予測される操作態様である
請求項2に記載の運転支援装置。
【請求項4】
前記学習の要否、及び前記学習された操作態様に関する情報に基づく運転支援の要否、の少なくとも一方が、前記該当する交通情報の直前に行われた車両操作から前記該当する交通情報に至るまでの経過時間及び移動距離の少なくとも一方に基づき判断される
請求項2または3に記載の運転支援装置。
【請求項5】
前記学習は、前記運転支援に必要とされる要素毎に特徴量の異なる複数の操作態様に関する情報を対象として行われる
請求項1〜4のいずれか一項に記載の運転支援装置。
【請求項6】
前記学習は、前記車両の運転支援が実行されたときの車両操作の追従の有無を加味し、追従の無い車両操作が行われたときの操作態様に関する情報の影響を抑制するかたちで行われる
請求項1〜5のいずれか一項に記載の運転支援装置。
【請求項7】
請求項1〜6のいずれか一項に記載の運転支援装置において、
前記交通情報毎に前記操作態様を標準化した運転支援モデルをさらに備え、
前記学習は、各該当する交通情報での前記運転支援モデルと実際に行われた車両操作とのずれ量の学習として行われ、前記次期運転支援態様の決定は、この学習されたずれ量に基づく前記運転支援モデルの補正として行われる
ことを特徴とする運転支援装置。
【請求項8】
請求項1〜6のいずれか一項に記載の運転支援装置において、
前記交通情報毎に前記操作態様を標準化した運転支援モデルと、前記車両の運転支援が実行されたときの車両操作の追従態様に基づいて前記学習された情報の信頼性を判断する判断手段とをさらに備え、
前記学習は、前記各交通情報下で検出された操作態様そのものを交通情報毎に関連付ける態様で行われ、前記次期運転支援態様の決定は、各該当する交通情報での前記判断手段により信頼性が維持されている旨判断されている操作態様と前記運転支援モデルとのいずれかの選択として行われる
ことを特徴とする運転支援装置。
【請求項9】
前記学習される操作態様に関する情報は、前記各交通情報下での車両の減速操作に関す
る情報であり、前記次期運転支援態様の決定は、当該車両の減速操作に基づく車両の減速支援タイミングの決定として行われる
請求項1〜8のいずれか一項に記載の運転支援装置。
【請求項10】
前記次期運転支援態様として決定される前記車両の減速支援タイミングは、前記該当する交通情報の直前に行われた車両の減速操作のタイミングと相反するタイミングに設定される
請求項9に記載の運転支援装置。
【請求項11】
前記交通情報は、車載用のカーナビゲーションシステム、及び車載カメラ、及び車両間通信システム、及び路車間通信システムの少なくとも1つを通じて取得される
請求項1〜10のいずれか一項に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−227833(P2011−227833A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−99189(P2010−99189)
【出願日】平成22年4月22日(2010.4.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月22日(2010.4.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]