
運転支援装置
【課題】本発明は、路側装置から受信した支援対象地点までの支援情報を利用して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】支援情報に基づいて支援対象地点における運転支援を行う運転支援装置1であって、支援情報(現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報)を取得する支援情報取得手段10,21と、自車の現在位置を検出する現在位置検出手段11と、支援対象地点を含む地図情報を記憶する記憶手段11aと、現在位置情報と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第1の支援対象候補地点と、検出された現在位置と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第2の支援対象候補地点と、支援対象地点の位置情報とを比較する比較手段22と、その比較結果に基づいて運転支援を行う運転支援手段23,24とを備えることを特徴とする。
【解決手段】支援情報に基づいて支援対象地点における運転支援を行う運転支援装置1であって、支援情報(現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報)を取得する支援情報取得手段10,21と、自車の現在位置を検出する現在位置検出手段11と、支援対象地点を含む地図情報を記憶する記憶手段11aと、現在位置情報と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第1の支援対象候補地点と、検出された現在位置と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第2の支援対象候補地点と、支援対象地点の位置情報とを比較する比較手段22と、その比較結果に基づいて運転支援を行う運転支援手段23,24とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援装置に関する。
【背景技術】
【0002】
運転者の運転負荷を軽減するために、運転支援を行う様々な運転支援装置が開発されている。また、近年、道路上に光ビーコンが設置され、光ビーコンからVICS[Vehicle InformationCommunication System]情報が車両側に提供されている。さらに、光ビーコンからインフラ情報(道路線形情報、交差点情報、車線毎の信号サイクル情報など)も提供される。この光ビーコンからのインフラ情報を利用したインフラ協調サービスによる運転支援が検討されている。例えば、特許文献1に記載の装置では、光ビーコンからの交差点での停止線の位置情報や信号機の信号情報などを受信し、これらの受信した情報、自車位置及び車速などに基づいて危険走行状態にあるか否かを判定し、危険走行状態の場合には加減速制御を行う。さらに、この装置では、光ビーコンから受信したときの位置(光ビーコンの設置位置)に基づいて自車の位置情報を補正する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−296783号公報
【特許文献2】特開2004−239918号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
インフラ協調サービスを行う場合には自車位置を用いるが、自車位置は車両側で保持している地図情報に基づいて検出されている。道路は新規に建設されたりするので、車両側の地図情報の一部のデータが古くなり、サービス対象の交差点までの実際の道路形状と車両側の地図情報とが異なる場合がある。このような場合、上記装置のように自車位置だけを補正したとしても、その補正後の自車位置が車両側の地図上で整合性が取れない。その結果、適切なインフラ協調サービスを行うことができない。
【0005】
そこで、本発明は、路側装置から受信した支援対象地点までの支援情報を利用して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、路側装置から受信した支援対象地点までの支援情報に基づいて支援対象地点における自車の運転を支援する運転支援装置であって、路側装置から支援情報として現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報を取得する支援情報取得手段と、自車の現在位置を検出する現在位置検出手段と、支援対象地点を含む地図情報を記憶する記憶手段と、支援情報取得手段で取得した現在位置情報と支援対象地点までの道路線形情報及び記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第1の支援対象候補地点と、検出手段で検出した現在位置と支援情報取得手段で取得した支援対象地点までの道路線形情報及び記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第2の支援対象候補地点と、支援情報取得手段で取得した支援対象地点の位置情報とを比較する比較手段と、比較手段での比較結果に基づいて支援対象地点における運転支援を行う運転支援手段とを備えることを特徴とする。
【0007】
この運転支援装置では、支援情報取得手段により路側装置からの支援情報として現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報を取得する。この路側装置による支援情報は、高精度な情報である。また、運転支援装置では、現在位置検出手段により自車の現在位置を検出し、記憶手段に支援対象位置を含む地図情報を記憶している。そして、運転支援装置では、比較手段により、路側装置の支援情報による現在位置情報と支援対象地点までの道路線形情報及び支援対象地点を含む地図情報に基づいて第1の支援対象候補地点を特定するとともに、検出された現在位置と路側装置の支援情報による支援対象地点までの道路線形情報及び支援対象地点を含む地図情報に基づいて第2の支援対象候補地点を特定する。第1の支援対象候補地点は、路側装置からの道路線形情報(実際の道路に相当)と車両側で保持している地図情報との整合性を取った上での路側装置による現在位置を起点とした支援対象地点の候補地点である。一方、第2の支援対象候補地点は、路側装置からの道路線形情報と車両側で保持している地図情報との整合性を取った上での車両側で検出される現在位置を起点とした支援対象地点の候補地点である。また、路側装置からの支援対象地点の位置情報は、検出対象地点の実際の位置を示す正確な位置情報である。そこで、運転支援装置では、比較手段により、この第1の支援対象候補地点及び第2の支援対象候補地点と路側装置の支援情報による支援対象地点の位置情報とをそれぞれ比較する。この比較において、第1の支援対象候補地点が支援対象地点の位置情報と異なっている場合には車両側で保持している地図情報が間違っている可能性が高く、第2の支援対象候補地点が支援対象地点の位置情報と異なっている場合には車両側で検出される現在位置が間違っている可能性が高い。運転支援装置では、運転支援手段により、その比較結果に基づいて支援対象地点における運転支援(例えば、通常の運転支援、現在位置を修正して上での運転支援、運転支援内容の変更、運転支援中止)を行う。このように、運転支援装置では、路側装置による支援情報と車両側での情報(地図情報、現在位置)との整合性を確認することにより、適切な運転支援を行うことができる。
【0008】
本発明の上記運転支援装置では、運転支援手段は、第1の支援対象候補地点と第2の支援対象候補地点とが相違する場合、比較手段における支援対象地点の位置情報と第1の支援対象候補地点及び第2の支援対象候補地点との比較結果に基づいて運転支援に用いる自車の現在位置を補正すると好適である。
【0009】
この運転支援装置では、第1の支援対象候補地点と第2の支援対象候補地点とが相違する場合には支援対象地点の位置情報と第1の支援対象候補地点及び第2の支援対象候補地点との比較結果に基づいて運転支援に用いる自車の現在位置を補正することにより、現在位置を正しい位置に戻すことができ、高精度な現在位置に基づいてより適切な運転支援を行うことができる。
【発明の効果】
【0010】
本発明によれば、路側装置による支援情報と車両側での情報(地図情報、現在位置)との整合性を確認することにより、適切な運転支援を行うことができる。
【図面の簡単な説明】
【0011】
【図1】本実施の形態に係るインフラ協調システムの構成図である。
【図2】光ビーコンが設置され、インフラ協調サービスが可能なエリアの道路状況の一例である。
【図3】インフラ起点とナビ起点の地図マッチング結果に応じたインフラ協調サービスの一覧表である。
【図4】図1のECUにおける処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0013】
本実施の形態では、本発明に係る運転支援装置を、ナビゲーションシステムを装備した車両に搭載されるインフラ協調システムに適用する。本実施の形態に係るインフラ協調システムは、光ビーコンからのインフラ情報を受信し、インフラ情報を利用してサービス対象の交差点におけるインフラ協調サービス(運転支援)を行う。インフラ協調サービスとしては、例えば、自車がサービス対象交差点に赤信号で進入すると予測した場合に運転者に対して注意喚起を行う。
【0014】
図1〜図3を参照して、本実施の形態に係るインフラ協調システム1について説明する。図1は、実施の形態に係るインフラ協調システムの構成図である。図2は、光ビーコンが設置され、インフラ協調サービスが可能なエリアの道路状況の一例である。図3は、インフラ起点とナビ起点の地図マッチング結果に応じたインフラ協調サービスの一覧表である。
【0015】
インフラ協調システム1は、ナビゲーションシステムと連携してインフラ協調サービスを行っており、ナビゲーションシステムからの情報(現在位置、地図情報など)を利用する。インフラ協調システム1では、より信頼性の高いサービスを実施するために、インフラ情報とナビ情報との整合性を確認する。
【0016】
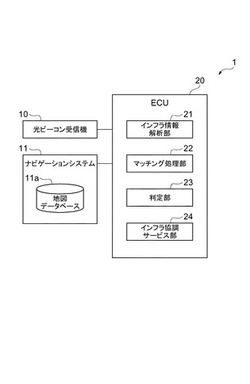
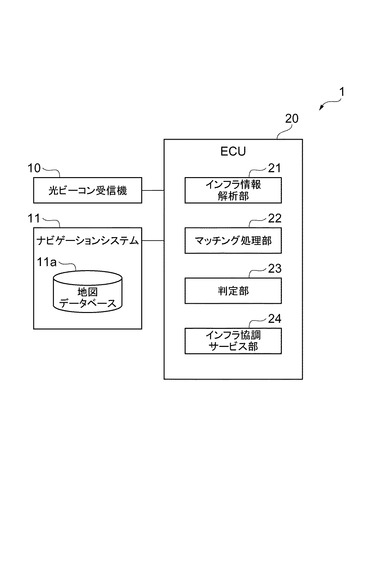
そのために、インフラ協調システム1は、光ビーコン受信機10、ナビゲーションシステム11(地図データベース11a)、ECU[Electronic Control Unit]20を備えており、ECU20にはインフラ情報解析部21、マッチング処理部22、判定部23、インフラ協調サービス部24が構成される。
【0017】
なお、本実施の形態では、光ビーコン受信機10及びインフラ情報解析部21が特許請求の範囲に記載する支援情報取得手段に相当し、ナビゲーションシステム11が特許請求の範囲に記載する現在位置検出手段に相当し、ナビゲーションシステム11の地図データベース11aが特許請求の範囲に記載する記憶手段に相当し、マッチング処理部22が特許請求の範囲に記載する比較手段に相当し、判定部23及びインフラ協調サービス部24が特許請求の範囲に記載する運転支援手段に相当する。
【0018】
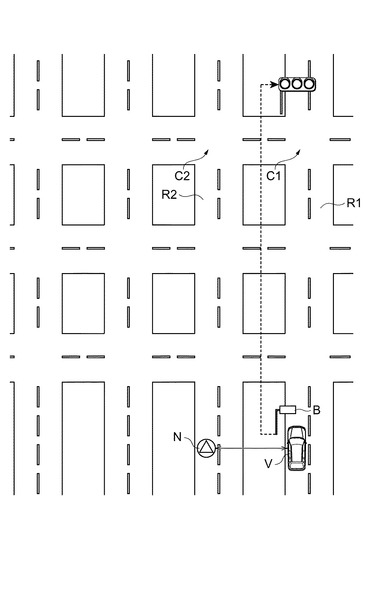
光ビーコンBは、図2に示すように、サービス対象の交差点C1から所定距離手前の位置に設置される。光ビーコンBでは、近赤外線によりデータ通信でき、各種情報を含む信号を交差点手前のダウンリンクエリアにダウンリンクする。このダウンリンクエリアを自車Vが通過するときに、自車Vでは光ビーコンBからの信号を受信できる。
【0019】
光ビーコン受信機10は、光ビーコンアンテナや処理装置などを備えており、光ビーコンから近赤外線によって情報を受信する受信機である。光ビーコン受信機10では、光ビーコンアンテナでダウンリンクエリア内で光ビーコンからの信号を受信する。光ビーコン受信機10では、処理装置でその受信した信号を復調してダウンリンク情報を取り出し、そのダウンリンク情報をECU20に送信する。光ビーコン受信機10で光ビーコンから信号を受信したときには、光ビーコンの設置位置は、自車の実際の位置に略相当する位置であり、高精度な現在位置情報である。なお、光ビーコンとの間で情報を送受信できる光ビーコン送受信機でもよい。
【0020】
ダウンリンク情報としては、VICS情報やインフラ情報がある。VICS情報は、全車線で共通の道路交通情報である。道路交通情報は、渋滞情報、交通規制情報、駐車場情報などがある。インフラ情報は、サービス対象の交差点までの道路線形情報(道路の距離情報も含まれる)、その交差点の情報(交差点の形状情報や位置情報、停止線の情報など)、車線毎の信号サイクル情報、光ビーコンの設置位置などがある。ちなみに、インフラ情報は最新の情報であるので、精度が高い情報であり、例えば、道路線形情報は実際の道路に応じた情報であり、サービス対象の交差点の位置情報や停止線の位置情報は実際の各位置を示す情報である。
【0021】
信号サイクル情報は、青信号、黄信号、赤信号の点灯サイクル(矢灯信号を備える信号機の場合には矢灯信号も含めた点灯サイクル)、各信号の点灯時間(秒数)、現在点灯している信号とその信号が点灯してからの経過時間などである。光ビーコンから取得できる信号サイクル情報は、信号サイクルの2サイクル目までの情報を含む。通常の信号の場合には2サイクル目が確定している情報であるが、感応式信号等においては1サイクル目までは確定している情報であり、2サイクル目が未確定な情報となっていることがある。
【0022】
ナビゲーションシステム11は、自車の現在位置(自車位置)や走行方向の検出及び目的地までの経路案内などを行うシステムである。ナビゲーションシステム11は、地図データベース11aを備えている。地図データベース11aには、地図情報(ノード情報(位置情報、接続するリンクなど)、リンク情報(リンク長、接続するノードなど)など)、交差点情報(位置情報など)などが格納されている。特に、ナビゲーションシステム11では、地図データベース11aに格納されている自車の現在位置周辺(サービス対象交差点を十分に含む範囲)の地図情報や交差点情報、現在位置情報、車速情報などからなるナビ情報をECU20に送信する。また、ナビゲーションシステム11では、ECU20から現在位置の補正情報を受信すると、その補正情報に応じて現在位置を補正する。なお、ナビゲーションシステム11における現在位置検出では、GPS[Global Positioning System]を利用した現在位置測位とマップマッチングなどを利用して現在位置を検出している。
【0023】
ECU20は、CPU[Central ProcessingUnit]、ROM[Read Only Memory]、RAM[RandomAccess Memory]などからなる電子制御ユニットであり、インフラ協調システム1を統括制御する。ECU20には、ROMに格納されるアプリケーションプログラムがRAMにロードされ、CPUで実行されることによってインフラ情報解析部21、マッチング処理部22、判定部23、インフラ協調サービス部24が構成される。ECU20では、自車がダウンリンクエリア通過時に光ビーコン受信機10からダウンリンク情報を受信し、所定時間毎にナビゲーションシステム11からナビ情報を受信する。そして、ECU20では、これらの各情報に基づいて各部21〜24での処理を行う。
【0024】
インフラ情報解析部21について説明する。インフラ情報解析部21では、光ビーコン受信機10からのダウンリンク情報からインフラ情報を抽出する。そして、インフラ情報解析部21では、インフラ情報のサービス対象交差点までの道路線形情報からサービス経路を取得する。また、インフラ情報解析部21では、インフラ情報の交差点情報から交差点の位置情報(特に、停止線の位置情報)を取得する。インフラ情報解析部21では、インフラ情報の光ビーコン設置位置情報(インフラサービス起点位置情報)を取得する。
【0025】
マッチング処理部22について説明する。マッチング処理部22では、光ビーコンからの信号を受信したときに、インフラ情報の光ビーコン設置位置を起点としてナビ情報の現在位置周辺の地図情報とインフラ情報のサービス対象交差点までの道路線形情報(実際の道路線形に相当)との地図マッチングを行う。ここでは、光ビーコン設置位置座標を起点としてインフラ情報の道路線形情報に従ってサービス対象交差点の候補位置をナビ情報の地図情報上で特定し、この特定した位置とインフラ情報のサービス対象交差点の位置とが一致している場合に地図マッチングが成功と判定する。
【0026】
また、マッチング処理部22では、光ビーコンからの信号を受信したときに、ナビ情報の自車位置を起点としてナビ情報の現在位置周辺の地図情報とインフラ情報のサービス対象交差点までの道路線形情報との地図マッチングを行う。ここでは、自車位置を起点としてインフラ情報の道路線形情報に従ってサービス対象交差点の候補位置をナビ情報の地図情報上で特定し、この特定した位置とインフラ情報のサービス対象交差点の位置とが一致している場合に地図マッチングが成功と判定する。
【0027】
図2に示す例では、符号C1で示す交差点がサービス対象交差点であり、このサービス対象交差点C1に繋がる道路R1に光ビーコンBが設置されている。この例の場合、自車Vは光ビーコンBが設置されている道路R1を走行しているが、ナビゲーションシステムでは道路R1の左側の道路R2上で自車位置Nを検出している。光ビーコンBの設置位置を起点として地図マッチングを行った場合、交差点C1の位置をサービス対象交差点の候補位置と特定し、地図マッチングが成功する。一方、ナビの自車位置Nを起点として地図マッチングを行った場合、交差点C2の位置をサービス対象交差点の候補位置と特定し、地図マッチングが失敗する。この場合、ナビの地図情報は実際の道路(インフラの道路線形情報)と整合性が取れているが、ナビの自車位置Nは間違っている。
【0028】
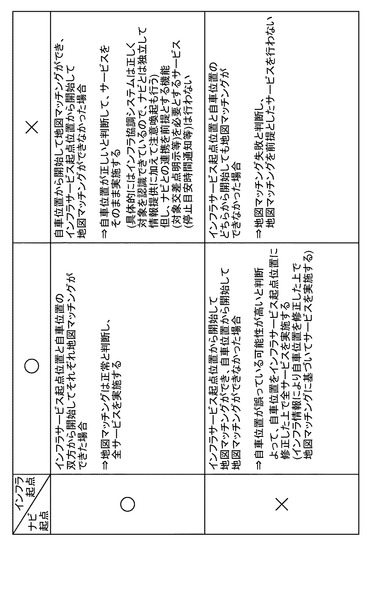
判定部23について説明する。判定部23では、光ビーコン設置位置(インフラサービス起点位置)を起点とした地図マッチングが成功したか否かを判定するとともにナビ情報の自車位置を起点とした地図マッチングが成功したか否かを判定し、この2つの判定結果に応じてインフラ協調サービスを行う(図3参照)。
【0029】
2つの地図マッチングが共に成功した場合、判定部23では、ナビ情報の自車位置は実際の自車の位置(自車位置は光ビーコン設置位置にある)と判断するとともに、地図情報は自車位置からサービス対象交差点までインフラ情報の道路線形情報(実際の道路)と整合していると判断する。そして、ECU20では、通常の全てのインフラ協調サービスを行うと判定する。
【0030】
光ビーコン設置位置を起点とした地図マッチングが成功したが、ナビ情報の自車位置を起点とした地図マッチングが失敗した場合、ECU20では、ナビ情報の自車位置は実際の自車の位置とは異なっている可能性が高い(自車位置は光ビーコン設置位置にない)と判断するとともに、地図情報は自車位置からサービス対象交差点までインフラ情報の道路線形情報と整合していると判断する。そして、ECU20では、自車位置を補正するために光ビーコン設置位置を現在位置の補正情報としてナビゲーションシステム11に送信するとともに、通常の全てのインフラ協調サービスを行うと判定する。
【0031】
ナビ情報の自車位置を起点とした地図マッチングが成功したが、光ビーコン設置位置を起点とした地図マッチングが失敗した場合、ECU20では、地図情報は自車位置からサービス対象交差点までインフラ情報の道路線形情報と整合していない(ナビ情報の地図情報とインフラ情報の道路線形情報との誤差が大きい、あるいは、地図情報が古いデータなど)と判断する。この場合、自車位置を起点とした地図マッチングができているので、自車位置をそのまま利用した場合でもサービスの開始タイミングなどを誤る虞が少ないと考え、ECU20では、インフラ協調サービスを行うと判定する。ただし、インフラ情報の道路線形情報とナビ情報の地図情報との整合性が取れていない可能性が高いので、ナビゲーションシステム11との連携を前提とする機能(例えば、サービス対象交差点の交差点名表示)を必要とするサービス(例えば、停止目安時間通知)は行わない。
【0032】
2つの地図マッチングが共に失敗した場合、ECU20では、ナビ情報の自車位置は実際の自車の位置とは異なっている可能性が高いと判断するとともに、地図情報も自車位置からサービス対象交差点までインフラ情報の道路線形情報と整合していないと判断する。そして、ECU20では、地図マッチングを前提としたサービスを行わないと判断する。この場合、例えば、運転者に前方に信号機が存在することなどの情報提供だけを行う。
【0033】
インフラ協調サービス部24について説明する。インフラ協調サービス部24では、判定部23で通常の全てのインフラ協調サービスを行うと判定した場合、インフラ情報解析部21で取得したインフラ情報とナビゲーションシステム11からのナビ情報を用いて、地図マッチングを行って、通常行う全てのインフラ協調サービスを行う。例えば、自車位置と道路線形情報から求めたサービス対象交差点までの残距離、車速情報(加速度情報を用いてもよい)及び信号サイクル情報に基づいて、自車がサービス対象交差点に進入するときの信号機の点灯色を予測し、自車がサービス対象交差点に進入するときに赤信号と予測した場合には運転者に対する注意喚起(例えば、前方の交差点の信号機が赤信号になることなどを音声出力や画像表示する)を行う。
【0034】
また、インフラ協調サービス部24では、判定部23でナビゲーションシステム11と連携する機能は行わないと判定した場合、通常行う全てのインフラ協調サービスからその機能を除いて、インフラ協調サービスを行う。
【0035】
また、インフラ協調サービス部24では、判定部23で地図マッチングを前提としたインフラ協調サービスを行わないと判定した場合、ECU20では、情報提供(例えば、前方の交差点に信号機が存在するなどを音声出力や画像表示する)などだけを行う。
【0036】
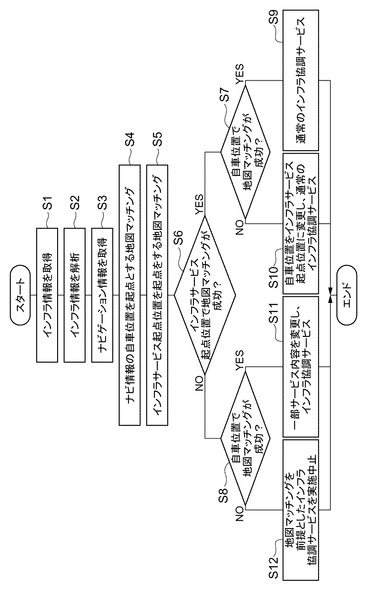
図1〜図3を参照して、インフラ協調システム1における動作について説明する。特に、ECU20における処理については図4のフローチャートに沿って説明する。図4は、図1のECUにおける処理の流れを示すフローチャートである。
【0037】
自車が交差点手前のダウンリンクエリアに入ると、光ビーコン受信機10では、光ビーコンからダウンリンク情報を含む信号を受信し、そのダウンリンク情報をECU20に送信する。ECU20では、このダウリンク情報(特に、インフラ情報)を受信し(S1)、そのインフラ情報を解析してサービス対象交差点までの道路線形情報、サービス対象の交差点情報、信号サイクル情報、光ビーコン設置位置などを取得する(S2)。
【0038】
ナビゲーションシステム11では、所定時間毎に、現在位置、車速情報、現在位置周辺の地図情報などを含むナビ情報をECU20に送信している。ECU20では、このナビ情報を受信し、現在位置(自車位置)、車速情報、現在位置周辺の地図情報などを取得する(S3)。
【0039】
インフラ情報を受信したときに(光ビーコン受信機10で光ビーコンからの信号を受信できたときに)、ECU20では、ナビ情報の地図情報及びインフラ情報の道路線形情報とサービス対象交差点の位置情報を用いて、ナビ情報の自車位置を起点とする地図マッチングを行う(S4)。また、ECU20では、ナビ情報の地図情報及びインフラ情報の道路線形情報とサービス対象交差点の位置情報を用いて、インフラサービス起点位置(光ビーコン設置位置)を起点とする地図マッチングを行う(S5)。
【0040】
ECU20では、インフラサービス起点位置を起点とする地図マッチングが成功したか否かを判定する(S6)。S6にてインフラサービス起点位置を起点とする地図マッチングが成功したと判定した場合、ECU20では、自車位置を起点とする地図マッチングが成功したか否か判定する(S7)。
【0041】
S7にて自車位置を起点とする地図マッチングが成功したと判定した場合、ECU20では、通常のインフラ協調サービスを行うと判定し、通常行う全てのインフラ協調サービスを行う(S9)。
【0042】
一方、S7にて自車位置を起点とする地図マッチングが失敗したと判定した場合、ECU20では、自車位置をインフラサービス起点位置に変更するためにナビゲーションシステムに11に光ビーコン設置位置を示す補正情報を送信する(S10)。そして、ECU20では、通常のインフラ協調サービスを行うと判定し、通常行う全てのインフラ協調サービスを行う(S10)。補正情報を受信すると、ナビゲーションシステム11では、自車位置を光ビーコン設置位置に変更する。そして、ナビゲーションシステム11では、この補正した自車位置から現在位置検出を行い、検出した現在位置を含むナビ情報をECU20に送信する。
【0043】
S6にてインフラサービス起点位置を起点とする地図マッチングが失敗したと判定した場合、ECU20では、自車位置を起点とする地図マッチングが成功したか否か判定する(S8)。
【0044】
S8にて自車位置を起点とする地図マッチングが成功したと判定した場合、ECU20では、ナビゲーションシステム11と連携する機能を除いた一部のインフラ協調サービスを行うと判定し、その一部のインフラ協調サービスを行う(S11)。
【0045】
一方、S8にて自車位置を起点とする地図マッチングが失敗したと判定した場合、ECU20では、地図マッチングを前提としたインフラ協調サービスを行わないと判定し、地図マッチングを前提としないインフラ協調サービスだけを行う(S12)。
【0046】
このインフラ協調システム1によれば、インフラ側の道路線形情報とサービス対象交差点の位置情報及び車両側の地図情報を用いて、インフラ側の光ビーコン設置位置と車両側の自車位置の双方を起点とする地図マッチングを行うことにより、2つの地図マッチングが成功するか否かをそれぞれ判定し(ひいては、自車位置、地図情報が正しいか否かを判断し)、その判定結果に応じて適切なインフラ協調サービスを行うことができる。その結果、インフラ協調システム1やインフラ協調サービスへの信頼性と訴求力を向上させることができる。
【0047】
特に、インフラ協調システム1では、車両側の地図情報がインフラ側の道路線形情報(実際の道路線形に相当)と整合性が取れているかを確認した上で自車位置が正しいか否かを判断し、正しくないと判断した場合には光ビーコン設置位置に補正しているので、自車位置の信頼性を高めることができる。そして、この高精度な自車位置を用いて、より精度の高いインフラ協調サービスを行うことができる。
【0048】
また、インフラ協調システム1では、光ビーコン設置位置を起点とした地図マッチングができない場合でも自車位置を起点とした地図マッチングができた場合には一部のサービスを制限してインフラ強調サービスを継続するので、インフラ協調サービスを行うケースを極力増やすことができる。
【0049】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0050】
例えば、本実施の形態ではナビゲーションシステムを装備する車両に搭載されるインフラ協調システムに適用したが、ナビゲーションシステムを装備しない車両にも適用可能であり、路側装置からの支援情報を利用する他の運転支援装置にも適用可能である。ナビゲーションシステムを装備しない車両の場合、地図データベースを別途備える構成とすればよく、現在位置についてもGPS受信機などの現在位置検出手段を別途備える構成とすればよい。
【0051】
また、本実施の形態では路側装置からの支援情報として光ビーコンからのインフラ情報を適用したが、路側装置としては光ビーコン以外の路側装置でも適用可能であり、支援情報としても他の支援情報でも適用可能である。
【0052】
また、本実施の形態では支援対象地点を交差点としたが、踏み切り、合流点などの他の地点としてもよい。
【0053】
また、本実施の形態ではインフラ協調サービスとしてサービス対象交差点に自車が赤信号で進入すると予測した場合に注意喚起する場合を例に挙げたが、注意喚起以外にも車両の減速や停止などを行う車両制御を行ってもよいし、あるいは、インフラ情報を利用した他のインフラ協調サービスを行ってもよい。
【0054】
また、本実施の形態では光ビーコン設置位置を起点とした地図マッチングが失敗した場合でも一部のサービスを制限してインフラ協調サービスを継続する構成としたが、サービスを中止してもよい。
【符号の説明】
【0055】
1…インフラ協調システム、10…光ビーコン受信機、11…ナビゲーションシステム、11a…地図データベース、20…ECU、21…インフラ情報解析部、22…マッチング処理部、23…判定部、24…インフラ協調サービス部
【技術分野】
【0001】
本発明は、運転支援装置に関する。
【背景技術】
【0002】
運転者の運転負荷を軽減するために、運転支援を行う様々な運転支援装置が開発されている。また、近年、道路上に光ビーコンが設置され、光ビーコンからVICS[Vehicle InformationCommunication System]情報が車両側に提供されている。さらに、光ビーコンからインフラ情報(道路線形情報、交差点情報、車線毎の信号サイクル情報など)も提供される。この光ビーコンからのインフラ情報を利用したインフラ協調サービスによる運転支援が検討されている。例えば、特許文献1に記載の装置では、光ビーコンからの交差点での停止線の位置情報や信号機の信号情報などを受信し、これらの受信した情報、自車位置及び車速などに基づいて危険走行状態にあるか否かを判定し、危険走行状態の場合には加減速制御を行う。さらに、この装置では、光ビーコンから受信したときの位置(光ビーコンの設置位置)に基づいて自車の位置情報を補正する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−296783号公報
【特許文献2】特開2004−239918号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
インフラ協調サービスを行う場合には自車位置を用いるが、自車位置は車両側で保持している地図情報に基づいて検出されている。道路は新規に建設されたりするので、車両側の地図情報の一部のデータが古くなり、サービス対象の交差点までの実際の道路形状と車両側の地図情報とが異なる場合がある。このような場合、上記装置のように自車位置だけを補正したとしても、その補正後の自車位置が車両側の地図上で整合性が取れない。その結果、適切なインフラ協調サービスを行うことができない。
【0005】
そこで、本発明は、路側装置から受信した支援対象地点までの支援情報を利用して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、路側装置から受信した支援対象地点までの支援情報に基づいて支援対象地点における自車の運転を支援する運転支援装置であって、路側装置から支援情報として現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報を取得する支援情報取得手段と、自車の現在位置を検出する現在位置検出手段と、支援対象地点を含む地図情報を記憶する記憶手段と、支援情報取得手段で取得した現在位置情報と支援対象地点までの道路線形情報及び記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第1の支援対象候補地点と、検出手段で検出した現在位置と支援情報取得手段で取得した支援対象地点までの道路線形情報及び記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第2の支援対象候補地点と、支援情報取得手段で取得した支援対象地点の位置情報とを比較する比較手段と、比較手段での比較結果に基づいて支援対象地点における運転支援を行う運転支援手段とを備えることを特徴とする。
【0007】
この運転支援装置では、支援情報取得手段により路側装置からの支援情報として現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報を取得する。この路側装置による支援情報は、高精度な情報である。また、運転支援装置では、現在位置検出手段により自車の現在位置を検出し、記憶手段に支援対象位置を含む地図情報を記憶している。そして、運転支援装置では、比較手段により、路側装置の支援情報による現在位置情報と支援対象地点までの道路線形情報及び支援対象地点を含む地図情報に基づいて第1の支援対象候補地点を特定するとともに、検出された現在位置と路側装置の支援情報による支援対象地点までの道路線形情報及び支援対象地点を含む地図情報に基づいて第2の支援対象候補地点を特定する。第1の支援対象候補地点は、路側装置からの道路線形情報(実際の道路に相当)と車両側で保持している地図情報との整合性を取った上での路側装置による現在位置を起点とした支援対象地点の候補地点である。一方、第2の支援対象候補地点は、路側装置からの道路線形情報と車両側で保持している地図情報との整合性を取った上での車両側で検出される現在位置を起点とした支援対象地点の候補地点である。また、路側装置からの支援対象地点の位置情報は、検出対象地点の実際の位置を示す正確な位置情報である。そこで、運転支援装置では、比較手段により、この第1の支援対象候補地点及び第2の支援対象候補地点と路側装置の支援情報による支援対象地点の位置情報とをそれぞれ比較する。この比較において、第1の支援対象候補地点が支援対象地点の位置情報と異なっている場合には車両側で保持している地図情報が間違っている可能性が高く、第2の支援対象候補地点が支援対象地点の位置情報と異なっている場合には車両側で検出される現在位置が間違っている可能性が高い。運転支援装置では、運転支援手段により、その比較結果に基づいて支援対象地点における運転支援(例えば、通常の運転支援、現在位置を修正して上での運転支援、運転支援内容の変更、運転支援中止)を行う。このように、運転支援装置では、路側装置による支援情報と車両側での情報(地図情報、現在位置)との整合性を確認することにより、適切な運転支援を行うことができる。
【0008】
本発明の上記運転支援装置では、運転支援手段は、第1の支援対象候補地点と第2の支援対象候補地点とが相違する場合、比較手段における支援対象地点の位置情報と第1の支援対象候補地点及び第2の支援対象候補地点との比較結果に基づいて運転支援に用いる自車の現在位置を補正すると好適である。
【0009】
この運転支援装置では、第1の支援対象候補地点と第2の支援対象候補地点とが相違する場合には支援対象地点の位置情報と第1の支援対象候補地点及び第2の支援対象候補地点との比較結果に基づいて運転支援に用いる自車の現在位置を補正することにより、現在位置を正しい位置に戻すことができ、高精度な現在位置に基づいてより適切な運転支援を行うことができる。
【発明の効果】
【0010】
本発明によれば、路側装置による支援情報と車両側での情報(地図情報、現在位置)との整合性を確認することにより、適切な運転支援を行うことができる。
【図面の簡単な説明】
【0011】
【図1】本実施の形態に係るインフラ協調システムの構成図である。
【図2】光ビーコンが設置され、インフラ協調サービスが可能なエリアの道路状況の一例である。
【図3】インフラ起点とナビ起点の地図マッチング結果に応じたインフラ協調サービスの一覧表である。
【図4】図1のECUにおける処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0013】
本実施の形態では、本発明に係る運転支援装置を、ナビゲーションシステムを装備した車両に搭載されるインフラ協調システムに適用する。本実施の形態に係るインフラ協調システムは、光ビーコンからのインフラ情報を受信し、インフラ情報を利用してサービス対象の交差点におけるインフラ協調サービス(運転支援)を行う。インフラ協調サービスとしては、例えば、自車がサービス対象交差点に赤信号で進入すると予測した場合に運転者に対して注意喚起を行う。
【0014】
図1〜図3を参照して、本実施の形態に係るインフラ協調システム1について説明する。図1は、実施の形態に係るインフラ協調システムの構成図である。図2は、光ビーコンが設置され、インフラ協調サービスが可能なエリアの道路状況の一例である。図3は、インフラ起点とナビ起点の地図マッチング結果に応じたインフラ協調サービスの一覧表である。
【0015】
インフラ協調システム1は、ナビゲーションシステムと連携してインフラ協調サービスを行っており、ナビゲーションシステムからの情報(現在位置、地図情報など)を利用する。インフラ協調システム1では、より信頼性の高いサービスを実施するために、インフラ情報とナビ情報との整合性を確認する。
【0016】
そのために、インフラ協調システム1は、光ビーコン受信機10、ナビゲーションシステム11(地図データベース11a)、ECU[Electronic Control Unit]20を備えており、ECU20にはインフラ情報解析部21、マッチング処理部22、判定部23、インフラ協調サービス部24が構成される。
【0017】
なお、本実施の形態では、光ビーコン受信機10及びインフラ情報解析部21が特許請求の範囲に記載する支援情報取得手段に相当し、ナビゲーションシステム11が特許請求の範囲に記載する現在位置検出手段に相当し、ナビゲーションシステム11の地図データベース11aが特許請求の範囲に記載する記憶手段に相当し、マッチング処理部22が特許請求の範囲に記載する比較手段に相当し、判定部23及びインフラ協調サービス部24が特許請求の範囲に記載する運転支援手段に相当する。
【0018】
光ビーコンBは、図2に示すように、サービス対象の交差点C1から所定距離手前の位置に設置される。光ビーコンBでは、近赤外線によりデータ通信でき、各種情報を含む信号を交差点手前のダウンリンクエリアにダウンリンクする。このダウンリンクエリアを自車Vが通過するときに、自車Vでは光ビーコンBからの信号を受信できる。
【0019】
光ビーコン受信機10は、光ビーコンアンテナや処理装置などを備えており、光ビーコンから近赤外線によって情報を受信する受信機である。光ビーコン受信機10では、光ビーコンアンテナでダウンリンクエリア内で光ビーコンからの信号を受信する。光ビーコン受信機10では、処理装置でその受信した信号を復調してダウンリンク情報を取り出し、そのダウンリンク情報をECU20に送信する。光ビーコン受信機10で光ビーコンから信号を受信したときには、光ビーコンの設置位置は、自車の実際の位置に略相当する位置であり、高精度な現在位置情報である。なお、光ビーコンとの間で情報を送受信できる光ビーコン送受信機でもよい。
【0020】
ダウンリンク情報としては、VICS情報やインフラ情報がある。VICS情報は、全車線で共通の道路交通情報である。道路交通情報は、渋滞情報、交通規制情報、駐車場情報などがある。インフラ情報は、サービス対象の交差点までの道路線形情報(道路の距離情報も含まれる)、その交差点の情報(交差点の形状情報や位置情報、停止線の情報など)、車線毎の信号サイクル情報、光ビーコンの設置位置などがある。ちなみに、インフラ情報は最新の情報であるので、精度が高い情報であり、例えば、道路線形情報は実際の道路に応じた情報であり、サービス対象の交差点の位置情報や停止線の位置情報は実際の各位置を示す情報である。
【0021】
信号サイクル情報は、青信号、黄信号、赤信号の点灯サイクル(矢灯信号を備える信号機の場合には矢灯信号も含めた点灯サイクル)、各信号の点灯時間(秒数)、現在点灯している信号とその信号が点灯してからの経過時間などである。光ビーコンから取得できる信号サイクル情報は、信号サイクルの2サイクル目までの情報を含む。通常の信号の場合には2サイクル目が確定している情報であるが、感応式信号等においては1サイクル目までは確定している情報であり、2サイクル目が未確定な情報となっていることがある。
【0022】
ナビゲーションシステム11は、自車の現在位置(自車位置)や走行方向の検出及び目的地までの経路案内などを行うシステムである。ナビゲーションシステム11は、地図データベース11aを備えている。地図データベース11aには、地図情報(ノード情報(位置情報、接続するリンクなど)、リンク情報(リンク長、接続するノードなど)など)、交差点情報(位置情報など)などが格納されている。特に、ナビゲーションシステム11では、地図データベース11aに格納されている自車の現在位置周辺(サービス対象交差点を十分に含む範囲)の地図情報や交差点情報、現在位置情報、車速情報などからなるナビ情報をECU20に送信する。また、ナビゲーションシステム11では、ECU20から現在位置の補正情報を受信すると、その補正情報に応じて現在位置を補正する。なお、ナビゲーションシステム11における現在位置検出では、GPS[Global Positioning System]を利用した現在位置測位とマップマッチングなどを利用して現在位置を検出している。
【0023】
ECU20は、CPU[Central ProcessingUnit]、ROM[Read Only Memory]、RAM[RandomAccess Memory]などからなる電子制御ユニットであり、インフラ協調システム1を統括制御する。ECU20には、ROMに格納されるアプリケーションプログラムがRAMにロードされ、CPUで実行されることによってインフラ情報解析部21、マッチング処理部22、判定部23、インフラ協調サービス部24が構成される。ECU20では、自車がダウンリンクエリア通過時に光ビーコン受信機10からダウンリンク情報を受信し、所定時間毎にナビゲーションシステム11からナビ情報を受信する。そして、ECU20では、これらの各情報に基づいて各部21〜24での処理を行う。
【0024】
インフラ情報解析部21について説明する。インフラ情報解析部21では、光ビーコン受信機10からのダウンリンク情報からインフラ情報を抽出する。そして、インフラ情報解析部21では、インフラ情報のサービス対象交差点までの道路線形情報からサービス経路を取得する。また、インフラ情報解析部21では、インフラ情報の交差点情報から交差点の位置情報(特に、停止線の位置情報)を取得する。インフラ情報解析部21では、インフラ情報の光ビーコン設置位置情報(インフラサービス起点位置情報)を取得する。
【0025】
マッチング処理部22について説明する。マッチング処理部22では、光ビーコンからの信号を受信したときに、インフラ情報の光ビーコン設置位置を起点としてナビ情報の現在位置周辺の地図情報とインフラ情報のサービス対象交差点までの道路線形情報(実際の道路線形に相当)との地図マッチングを行う。ここでは、光ビーコン設置位置座標を起点としてインフラ情報の道路線形情報に従ってサービス対象交差点の候補位置をナビ情報の地図情報上で特定し、この特定した位置とインフラ情報のサービス対象交差点の位置とが一致している場合に地図マッチングが成功と判定する。
【0026】
また、マッチング処理部22では、光ビーコンからの信号を受信したときに、ナビ情報の自車位置を起点としてナビ情報の現在位置周辺の地図情報とインフラ情報のサービス対象交差点までの道路線形情報との地図マッチングを行う。ここでは、自車位置を起点としてインフラ情報の道路線形情報に従ってサービス対象交差点の候補位置をナビ情報の地図情報上で特定し、この特定した位置とインフラ情報のサービス対象交差点の位置とが一致している場合に地図マッチングが成功と判定する。
【0027】
図2に示す例では、符号C1で示す交差点がサービス対象交差点であり、このサービス対象交差点C1に繋がる道路R1に光ビーコンBが設置されている。この例の場合、自車Vは光ビーコンBが設置されている道路R1を走行しているが、ナビゲーションシステムでは道路R1の左側の道路R2上で自車位置Nを検出している。光ビーコンBの設置位置を起点として地図マッチングを行った場合、交差点C1の位置をサービス対象交差点の候補位置と特定し、地図マッチングが成功する。一方、ナビの自車位置Nを起点として地図マッチングを行った場合、交差点C2の位置をサービス対象交差点の候補位置と特定し、地図マッチングが失敗する。この場合、ナビの地図情報は実際の道路(インフラの道路線形情報)と整合性が取れているが、ナビの自車位置Nは間違っている。
【0028】
判定部23について説明する。判定部23では、光ビーコン設置位置(インフラサービス起点位置)を起点とした地図マッチングが成功したか否かを判定するとともにナビ情報の自車位置を起点とした地図マッチングが成功したか否かを判定し、この2つの判定結果に応じてインフラ協調サービスを行う(図3参照)。
【0029】
2つの地図マッチングが共に成功した場合、判定部23では、ナビ情報の自車位置は実際の自車の位置(自車位置は光ビーコン設置位置にある)と判断するとともに、地図情報は自車位置からサービス対象交差点までインフラ情報の道路線形情報(実際の道路)と整合していると判断する。そして、ECU20では、通常の全てのインフラ協調サービスを行うと判定する。
【0030】
光ビーコン設置位置を起点とした地図マッチングが成功したが、ナビ情報の自車位置を起点とした地図マッチングが失敗した場合、ECU20では、ナビ情報の自車位置は実際の自車の位置とは異なっている可能性が高い(自車位置は光ビーコン設置位置にない)と判断するとともに、地図情報は自車位置からサービス対象交差点までインフラ情報の道路線形情報と整合していると判断する。そして、ECU20では、自車位置を補正するために光ビーコン設置位置を現在位置の補正情報としてナビゲーションシステム11に送信するとともに、通常の全てのインフラ協調サービスを行うと判定する。
【0031】
ナビ情報の自車位置を起点とした地図マッチングが成功したが、光ビーコン設置位置を起点とした地図マッチングが失敗した場合、ECU20では、地図情報は自車位置からサービス対象交差点までインフラ情報の道路線形情報と整合していない(ナビ情報の地図情報とインフラ情報の道路線形情報との誤差が大きい、あるいは、地図情報が古いデータなど)と判断する。この場合、自車位置を起点とした地図マッチングができているので、自車位置をそのまま利用した場合でもサービスの開始タイミングなどを誤る虞が少ないと考え、ECU20では、インフラ協調サービスを行うと判定する。ただし、インフラ情報の道路線形情報とナビ情報の地図情報との整合性が取れていない可能性が高いので、ナビゲーションシステム11との連携を前提とする機能(例えば、サービス対象交差点の交差点名表示)を必要とするサービス(例えば、停止目安時間通知)は行わない。
【0032】
2つの地図マッチングが共に失敗した場合、ECU20では、ナビ情報の自車位置は実際の自車の位置とは異なっている可能性が高いと判断するとともに、地図情報も自車位置からサービス対象交差点までインフラ情報の道路線形情報と整合していないと判断する。そして、ECU20では、地図マッチングを前提としたサービスを行わないと判断する。この場合、例えば、運転者に前方に信号機が存在することなどの情報提供だけを行う。
【0033】
インフラ協調サービス部24について説明する。インフラ協調サービス部24では、判定部23で通常の全てのインフラ協調サービスを行うと判定した場合、インフラ情報解析部21で取得したインフラ情報とナビゲーションシステム11からのナビ情報を用いて、地図マッチングを行って、通常行う全てのインフラ協調サービスを行う。例えば、自車位置と道路線形情報から求めたサービス対象交差点までの残距離、車速情報(加速度情報を用いてもよい)及び信号サイクル情報に基づいて、自車がサービス対象交差点に進入するときの信号機の点灯色を予測し、自車がサービス対象交差点に進入するときに赤信号と予測した場合には運転者に対する注意喚起(例えば、前方の交差点の信号機が赤信号になることなどを音声出力や画像表示する)を行う。
【0034】
また、インフラ協調サービス部24では、判定部23でナビゲーションシステム11と連携する機能は行わないと判定した場合、通常行う全てのインフラ協調サービスからその機能を除いて、インフラ協調サービスを行う。
【0035】
また、インフラ協調サービス部24では、判定部23で地図マッチングを前提としたインフラ協調サービスを行わないと判定した場合、ECU20では、情報提供(例えば、前方の交差点に信号機が存在するなどを音声出力や画像表示する)などだけを行う。
【0036】
図1〜図3を参照して、インフラ協調システム1における動作について説明する。特に、ECU20における処理については図4のフローチャートに沿って説明する。図4は、図1のECUにおける処理の流れを示すフローチャートである。
【0037】
自車が交差点手前のダウンリンクエリアに入ると、光ビーコン受信機10では、光ビーコンからダウンリンク情報を含む信号を受信し、そのダウンリンク情報をECU20に送信する。ECU20では、このダウリンク情報(特に、インフラ情報)を受信し(S1)、そのインフラ情報を解析してサービス対象交差点までの道路線形情報、サービス対象の交差点情報、信号サイクル情報、光ビーコン設置位置などを取得する(S2)。
【0038】
ナビゲーションシステム11では、所定時間毎に、現在位置、車速情報、現在位置周辺の地図情報などを含むナビ情報をECU20に送信している。ECU20では、このナビ情報を受信し、現在位置(自車位置)、車速情報、現在位置周辺の地図情報などを取得する(S3)。
【0039】
インフラ情報を受信したときに(光ビーコン受信機10で光ビーコンからの信号を受信できたときに)、ECU20では、ナビ情報の地図情報及びインフラ情報の道路線形情報とサービス対象交差点の位置情報を用いて、ナビ情報の自車位置を起点とする地図マッチングを行う(S4)。また、ECU20では、ナビ情報の地図情報及びインフラ情報の道路線形情報とサービス対象交差点の位置情報を用いて、インフラサービス起点位置(光ビーコン設置位置)を起点とする地図マッチングを行う(S5)。
【0040】
ECU20では、インフラサービス起点位置を起点とする地図マッチングが成功したか否かを判定する(S6)。S6にてインフラサービス起点位置を起点とする地図マッチングが成功したと判定した場合、ECU20では、自車位置を起点とする地図マッチングが成功したか否か判定する(S7)。
【0041】
S7にて自車位置を起点とする地図マッチングが成功したと判定した場合、ECU20では、通常のインフラ協調サービスを行うと判定し、通常行う全てのインフラ協調サービスを行う(S9)。
【0042】
一方、S7にて自車位置を起点とする地図マッチングが失敗したと判定した場合、ECU20では、自車位置をインフラサービス起点位置に変更するためにナビゲーションシステムに11に光ビーコン設置位置を示す補正情報を送信する(S10)。そして、ECU20では、通常のインフラ協調サービスを行うと判定し、通常行う全てのインフラ協調サービスを行う(S10)。補正情報を受信すると、ナビゲーションシステム11では、自車位置を光ビーコン設置位置に変更する。そして、ナビゲーションシステム11では、この補正した自車位置から現在位置検出を行い、検出した現在位置を含むナビ情報をECU20に送信する。
【0043】
S6にてインフラサービス起点位置を起点とする地図マッチングが失敗したと判定した場合、ECU20では、自車位置を起点とする地図マッチングが成功したか否か判定する(S8)。
【0044】
S8にて自車位置を起点とする地図マッチングが成功したと判定した場合、ECU20では、ナビゲーションシステム11と連携する機能を除いた一部のインフラ協調サービスを行うと判定し、その一部のインフラ協調サービスを行う(S11)。
【0045】
一方、S8にて自車位置を起点とする地図マッチングが失敗したと判定した場合、ECU20では、地図マッチングを前提としたインフラ協調サービスを行わないと判定し、地図マッチングを前提としないインフラ協調サービスだけを行う(S12)。
【0046】
このインフラ協調システム1によれば、インフラ側の道路線形情報とサービス対象交差点の位置情報及び車両側の地図情報を用いて、インフラ側の光ビーコン設置位置と車両側の自車位置の双方を起点とする地図マッチングを行うことにより、2つの地図マッチングが成功するか否かをそれぞれ判定し(ひいては、自車位置、地図情報が正しいか否かを判断し)、その判定結果に応じて適切なインフラ協調サービスを行うことができる。その結果、インフラ協調システム1やインフラ協調サービスへの信頼性と訴求力を向上させることができる。
【0047】
特に、インフラ協調システム1では、車両側の地図情報がインフラ側の道路線形情報(実際の道路線形に相当)と整合性が取れているかを確認した上で自車位置が正しいか否かを判断し、正しくないと判断した場合には光ビーコン設置位置に補正しているので、自車位置の信頼性を高めることができる。そして、この高精度な自車位置を用いて、より精度の高いインフラ協調サービスを行うことができる。
【0048】
また、インフラ協調システム1では、光ビーコン設置位置を起点とした地図マッチングができない場合でも自車位置を起点とした地図マッチングができた場合には一部のサービスを制限してインフラ強調サービスを継続するので、インフラ協調サービスを行うケースを極力増やすことができる。
【0049】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0050】
例えば、本実施の形態ではナビゲーションシステムを装備する車両に搭載されるインフラ協調システムに適用したが、ナビゲーションシステムを装備しない車両にも適用可能であり、路側装置からの支援情報を利用する他の運転支援装置にも適用可能である。ナビゲーションシステムを装備しない車両の場合、地図データベースを別途備える構成とすればよく、現在位置についてもGPS受信機などの現在位置検出手段を別途備える構成とすればよい。
【0051】
また、本実施の形態では路側装置からの支援情報として光ビーコンからのインフラ情報を適用したが、路側装置としては光ビーコン以外の路側装置でも適用可能であり、支援情報としても他の支援情報でも適用可能である。
【0052】
また、本実施の形態では支援対象地点を交差点としたが、踏み切り、合流点などの他の地点としてもよい。
【0053】
また、本実施の形態ではインフラ協調サービスとしてサービス対象交差点に自車が赤信号で進入すると予測した場合に注意喚起する場合を例に挙げたが、注意喚起以外にも車両の減速や停止などを行う車両制御を行ってもよいし、あるいは、インフラ情報を利用した他のインフラ協調サービスを行ってもよい。
【0054】
また、本実施の形態では光ビーコン設置位置を起点とした地図マッチングが失敗した場合でも一部のサービスを制限してインフラ協調サービスを継続する構成としたが、サービスを中止してもよい。
【符号の説明】
【0055】
1…インフラ協調システム、10…光ビーコン受信機、11…ナビゲーションシステム、11a…地図データベース、20…ECU、21…インフラ情報解析部、22…マッチング処理部、23…判定部、24…インフラ協調サービス部
【特許請求の範囲】
【請求項1】
路側装置から受信した支援対象地点までの支援情報に基づいて支援対象地点における自車の運転を支援する運転支援装置であって、
前記路側装置から支援情報として現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報を取得する支援情報取得手段と、
自車の現在位置を検出する現在位置検出手段と、
支援対象地点を含む地図情報を記憶する記憶手段と、
前記支援情報取得手段で取得した現在位置情報と支援対象地点までの道路線形情報及び前記記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第1の支援対象候補地点と、前記検出手段で検出した現在位置と前記支援情報取得手段で取得した支援対象地点までの道路線形情報及び前記記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第2の支援対象候補地点と、前記支援情報取得手段で取得した支援対象地点の位置情報とを比較する比較手段と、
前記比較手段での比較結果に基づいて支援対象地点における運転支援を行う運転支援手段と
を備えることを特徴とする運転支援装置。
【請求項2】
前記運転支援手段は、第1の支援対象候補地点と第2の支援対象候補地点とが相違する場合、前記比較手段における支援対象地点の位置情報と第1の支援対象候補地点及び第2の支援対象候補地点との比較結果に基づいて運転支援に用いる自車の現在位置を補正することを特徴とする請求項1に記載する運転支援装置。
【請求項1】
路側装置から受信した支援対象地点までの支援情報に基づいて支援対象地点における自車の運転を支援する運転支援装置であって、
前記路側装置から支援情報として現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報を取得する支援情報取得手段と、
自車の現在位置を検出する現在位置検出手段と、
支援対象地点を含む地図情報を記憶する記憶手段と、
前記支援情報取得手段で取得した現在位置情報と支援対象地点までの道路線形情報及び前記記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第1の支援対象候補地点と、前記検出手段で検出した現在位置と前記支援情報取得手段で取得した支援対象地点までの道路線形情報及び前記記憶手段に記憶されている支援対象地点を含む地図情報に基づいて特定される第2の支援対象候補地点と、前記支援情報取得手段で取得した支援対象地点の位置情報とを比較する比較手段と、
前記比較手段での比較結果に基づいて支援対象地点における運転支援を行う運転支援手段と
を備えることを特徴とする運転支援装置。
【請求項2】
前記運転支援手段は、第1の支援対象候補地点と第2の支援対象候補地点とが相違する場合、前記比較手段における支援対象地点の位置情報と第1の支援対象候補地点及び第2の支援対象候補地点との比較結果に基づいて運転支援に用いる自車の現在位置を補正することを特徴とする請求項1に記載する運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−37341(P2011−37341A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−184926(P2009−184926)
【出願日】平成21年8月7日(2009.8.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月7日(2009.8.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]