
運転支援装置
【課題】 車両後退時に最終的に達成したい操作目標に対する進捗状況を暗示的に音を用いて運転者に簡単かつ効果的に報知する運転支援装置を提供することである。
【解決手段】車両後退時にリバース音を出力して運転を支援する運転支援装置50。車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部51と、リバース音を主音とみなした音階に属するリバース音を音階リバース音として管理するリバース音管理部52と、運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部53と、リバース音管理部によって管理されているリバース音から出力リバース音決定部によって決定された音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部54とが備えられている。
【解決手段】車両後退時にリバース音を出力して運転を支援する運転支援装置50。車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部51と、リバース音を主音とみなした音階に属するリバース音を音階リバース音として管理するリバース音管理部52と、運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部53と、リバース音管理部によって管理されているリバース音から出力リバース音決定部によって決定された音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部54とが備えられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両状態及び車両周辺状態を含む運転支援情報を音を通じて運転者に報知することで車両後退時の運転を支援する運転支援装置に関する。
【背景技術】
【0002】
自動車技術の分野では、その運転支援システムにおいて、報知音の音色を変化させる事によって運転者に周辺状況の変化を伝える多くの技術が知られており、最も一般的なものとしては、車両周辺の障害物となる物体との距離や危険度に応じて、報知音の周波数や音量、あるいは報知間隔を変化させる方法が広く使用されている。
【0003】
一方、車両の周囲の障害物となる検知した物体の位置及び方向を、警報音の音像を変化させるによって運転者に警告する立体音場警報装置が提案されている(例えば、特許文献1参照。)この装置では、警報音の音像を障害物の方向に定位させ、さらに警報優先度に応じて警報音を変化させる事によって、運転者が障害物の方向へ視線を向けるように誘導する方法が開示されている。
【0004】
また、上述したような障害物の位置を報知するだけでなく、音像の変化によって駐車操作の支援を目的とした経路誘導を行う装置も提案されている(特許文献2参照)。この装置では、目標駐車位置に対して自車両が傾いているとき、傾きに応じて各近接部位側に設定された基本定位位置間を往復動するような音響信号を出力し、この音響信号で生成される音像により目標駐車位置に対する自車両の位置関係を示す方法が開示されている。
【0005】
さらに、騒音環境下でも容易に識別でき、運転操作時の運転者のストレスを軽減する事を目的として、所定の操作の開始と終了とをビープ音などの単音を用いずに和音によって教示する装置が提案されている(特許文献3参照)。この装置では、操作の開始の教示として第1和音を出力し、終了の教示として第1和音とは異なる第2和音を出力するとともに、所定の操作に対する運転者の操作が教示と異なる場合に、第3和音として不協和音を出力する方法が開示されている。 また、この特許文献3には、開始の教示としての第1和音の出力は、終了の教示が行なわれるまで断続して行なわれ、終了に近づくにつれて断続周期が短縮される方法も開示されている。 また、主和音(ドミソ)に対する属音(ソシレ)を鳴らして運転操作の開始をし、所定の停止位置付近に至るまでの断続周期を短くしながら鳴らし続けるとともに、停止位置付近に至ると、主和音(ドミソ)を鳴らすことで運転者に運転操作の終結感を与える方法も開示されている。
【0006】
また、運転者の危険な運転に対して、不安定のある警告音によって緊張感を効果的に与える事を目的として、安心感のある和音と不安定感を感じる和音とを使い分けて報知を行なう方法が提案されている(特許文献4参照)。
この装置では、安定感を感じさせる警告音としてメジャースケールで構成する音階又は和音を用い、また不安定感を感じさせる警報音としてディミニッシュスケールやオーギュメントスケールで構成する音階又は和音が用いられる方法が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許2689792号公報(段落番号0014−0038、図2)
【特許文献2】特許2959326号公報(段落番号0021−0026、図2)
【特許文献3】特許4066698号公報(段落番号0006、0032−0033、図1)
【特許文献4】特開平11−208370号公報(段落番号0006−0041、図1)
【発明の概要】
【発明が解決しようとする課題】
【0008】
報知音の周波数や音量、あるいは報知間隔を変化させることによって周囲の状況変化を伝える方法では、運転者は変化する前の音を記憶した後に、変化した後の音とを比較して聞き分ける必要があるため、瞬時に周囲の変化を知覚することは困難である。よって、視線を向けなくてもすむが、音の変化を知覚しようとする意識をある一定時間持続させる必要があるために周囲への注意がおろそかになる可能性がある。さらに、音を鳴らし続ける場合、運転者がその継続する音を騒がしく感じるという可能性や、逆にその音に運転者が順応してしまい音の変化に対する方向感や距離感を認知しなくなる可能性がある。しかも、周囲の環境の変化に応じて、音に関する可変パラメータがどの程度変化するのかのルールを運転者があらかじめ理解しておく必要があり、知覚した音の変化の度合いに対して実際の周囲の状況変化が一致するようになるには、ある程度実際システムを使用してみて確認しながら理解してゆく必要があり、慣れるまでに時間がかかるという問題がある。
【0009】
特許文献1や特許文献2のような報知音の音像を変化させる方法は、複数のスピーカを用いて警告音の空間定位を変化させなければならないため、その装置が大掛かりとなる。また、自動車の車内という特殊な音響条件下のため、空間定位の精度に限界があり、ぼんやりとしたおおよその方向感や距離感をつかむことしかできず、瞬時に接近物の位置を明確に伝えることが難しい。また、運転者の体の向きによって知覚する位置精度が低下してしまい、音源として単なるピー音(正弦波)を使用した場合では音の方向性の判別が難しく、いずれの方向から鳴っているのかが瞬時には判別できないという欠点もある。
【0010】
特許文献3による運転支援装置では、単音ではなく和音を使用する事を提案しており、同音量であると仮定すれば単音に比べて和音のほうが識別性を向上させる事は期待できる。しかし、単に和音として同じ音源を同時に複数鳴らすだけでは、単音の場合に比べて運転者のストレスを軽減できるとは限らない。むしろ、識別性が上がり印象強く知覚される分だけ刺激が強くなり音が目立ちすぎるため、長い時間継続して鳴らされると運転者にとってはかえって煩わしく感じさせる可能性がある。
また、特許文献3では、状況の変化を表現するために、和音を鳴らすテンポを変化させるか、あるいは各単音を半音又は全音ずつずらしていくことを提案しているが、このように音に関するパラメータを少しずつ変化させて報知する手法は、上述で指摘した「運転者は変化する前の音を記憶した後に、変化した後の音とを比較して聞き分ける必要があるため、瞬時に周囲の変化を知覚することは困難である。」という同様の問題がある。
また、特許文献3では、属和音から主和音へのコード進行を活用して運転操作の終了を予期させる方法が開示されており、音楽理論に基づいたドミナントモーションと呼ばれる終止感の演出効果は期待できる。しかしながら、和音を鳴らす順番が属和音から主和音への一方通行に限定されているために、終了に到達するまでは属和音しか使用できず、もし停止までに時間がかかる場合には、結果的に同じ属和音を継続して鳴らし続ける事になる。あまりにも同じ属和音が続くと、基準となる主和音の記憶が薄まるために属和音で安定してしまい、主和音への終止への期待感を感じなくなる可能性がある。
【0011】
特許文献4による車両走行支援装置では、不協和音やマイナー系和音で緊急感を伝える報知方法を採用している。しかし、危険が確定しているわけでもない状況において、心地よくない音を頻繁に鳴らすことは運転者や同乗者にとっては不愉快でもあり、特に認知支援や注意喚起などのような危険が確定する前の予兆を報知するための利用には不適である。
【0012】
上記実情に鑑み、本発明の目的は、最終的に達成したい操作目標に対する進捗状況を暗示的に音を用いて簡単かつ効果的に報知する運転支援装置を提供することである。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明に係る運転支援装置は車両後退時にリバース音を出力して運転を支援するものであり、その特徴構成は、車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部と、前記リバース音を主音とみなした音階に属する音に対応するリバース音を音階リバース音として管理するリバース音管理部と、前記運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部と、前記リバース音管理部によって管理されているリバース音から前記出力リバース音決定部によって決定された前記音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部とを備えていることである。
【0014】
この構成では、従来から車両後退時に鳴らされるリバース音として採用されている音を主音とみなした自然長音階音や自然短音階などに属する音に対応するリバース音を音階リバース音が用意され、リバース管理部に管理されている。さらに、本発明の重要な機能部である出力リバース音決定部は、運転支援情報に応じて車両後退時に鳴らしていくリバース音を順次決定していくが、その決定アルゴリズムは音楽心理学の理論に基づいている。順次鳴らされていくリバース音列はいわゆる旋律を作り出すが、この旋律によって運転者が暗示されるものはその時点で得られている運転支援情報に基づくものに対応している。つまり、出力リバース音決定部の働きにより、順次出力されるリバース音の流れ(旋律)が、例えば、予め設定された音階における属音(ドミナント)から主音(トニック)へ移行するドミナントモーションに基づくものであれば、具体的には、「ソ」から「ド」への音の流れでリバース音を鳴らすことで、終止感、つまり安心感を運転者に与えることになる。これにより、単純にリバース音列を時系列で鳴らすような簡単な構成であるにもかかわらず、運転者に何らかの運転状況が暗示されることになる。
【0015】
さらに、本発明では、通常よく使われているリバース音を主音とする音階に属する音を他のリバース音として利用しているので、実際に出力されるリバース音の流れ(旋律)に違和感がなく、それを聞く煩わしさもなく、音楽心理学の理論に基づいて出力すべき音(リバース音)を決定していることから、そのほど意識せず瞬時に「安定から緊張」、「緊張から安定」といった感覚の変化を受け入れることができる。また、音像定位などのように複数スピーカやステレオ処理系などは不必要となり、コスト的に有利である。
【0016】
本発明に係るにおける特徴構成として、前記リバース音出力制御部は、前記特定された音階に基づく所定の時系列的な音の流れを作り出しているリバース音群を、同一周期で間欠的に出力することも好適である。この構成では、特定の運転支援情報、例えば最適な駐車走行軌跡に入りつつあるという情報に基づいて決定されたドミナントモーションを実現する「ソ」から「ド」へのリバース音の流れとしてのリバース音群が、同一周期(同一間隔)で鳴らすので、その音楽テンポが同じとなり、それを聞く側に違和感が生じにくい。
【0017】
本発明に係るにおけるより具体的な特徴構成として、前記出力リバース音決定部が、前記運転支援情報に応じて車両状態及び車両周辺状態の悪化傾向と良化傾向とを判定し、悪化傾向の判定時には主音から下属音、あるいは主音から属音となる音階の流れを決定し、良化傾向の判定時には下属音から主音、あるいは属音から主音となる音階の流れを決定するように構成することも好適である。ここで、悪化傾向とは、ある理想的な状態から外れていく傾向であり、例えば、目標走行ラインから車両が外れていく状態や障害物が自車に接近してくる状態である。また、良化傾向とは、ある理想的な状態に向かっている傾向であり、例えば、目標走行ラインに車両が近づいていく状態や障害物が自車から遠ざかっていく状態である。
この構成では、出力リバース音決定部は、運転支援情報に応じて実行中の車両後退における状況の時系列的な変化を評価し、その変化が良化傾向、悪化傾向、あるいは無変化(良化傾向でも悪化傾向でもない状態)、と判定する。例を挙げると、後進駐車走行時において、運転支援システムが想定した速度範囲内であれば良化傾向にあると判定し、下属和音から主和音あるいは属和音から主和音となる音階の流れを作り出し、運転者に安定感を感じさせる。逆に速度が超過した場合には悪化傾向にあると判定し、主和音から下属和音となる音階の流れを作り出し、運転者に不安を感じさせる音の流れを作り出す。これにより、このままでよいといった「好転している感覚(良化傾向)」や何かこのままではまずいといった「暗転している感覚(悪化傾向)」を運転者に暗示することが可能となる。その際、運転者は、リバース音の時系列的な流れであるリバース音群に割り当てられている特別な意味を前もって学習しておく必要はない。
【0018】
本発明の好適な実施形態の1つでは、前記リバース音管理部は、車両に固有の通常リバース音を特定音階の主音としての役割をもつ前記主リバース音とし、この主リバース音の音データに基づいて前記属音に対応する属リバース音と前記下属音に対応する下属リバース音とを生成するように構成されている。この構成では、この車両において通常の後進時に鳴らされるリバース音が基本となる主音、つまり主リバース音として用いられる。さらに、この主リバース音の音データを基準として、この主リバース音の音の高さによって規定される特定音階での主音とした場合の属リバース音と下属リバース音との音データが生成される。これにより、この車両で通常鳴らされているリバース音が主音として、その音階の音楽心理学的な理論に基づいて何らかの運転支援情報を暗示する音の流れが出力されるので、運転者にとっては違和感が生じにくい。
【0019】
なお、本発明の好適な実施の形態の1つでは、リバース音をどのような音階の流れで鳴らすかを決定するために用いられる前記車両状態及び車両周辺状態は、操舵角データ、自車位置データ、車両速度データ、障害物検出データによって直接求められる状態もしくはこれらのデータの組み合わせによって間接的に求められる状態である。この求められた状態から、目標駐車位置までの支援速度許容範囲に対する自車速度のずれ、目標駐車位置までの理想経路に対する操舵角のずれ、駐車支援開始位置の許容範囲に対する自車位置のずれ、車両進路上の障害物の接近といった状況をこの運転支援装置は認識することができる。
【図面の簡単な説明】
【0020】
【図1】車両の一部を切り欠いて運転席を見た斜視図である。
【図2】本発明の運転支援装置の1つの実施形態であるリバース音処理ユニットとこれに連携 する各ユニットとの機能を示す機能ブロック図である。
【図3】車両を駐車枠に誘導する経路を示す説明図である。
【図4】バックカメラによる撮影画像から駐車目標エリアを設定する方法を示す説明図である。
【図5】運転者へ暗示する内容と、旋律を示す楽譜との関係を示す説明図である。
【図6】車両後進時の1つのイベント例における、運転者へ暗示する内容と、旋律を示す楽譜の変化を模式的に示すタイムチャート図である。
【図7】車両後進時の別なイベント例における、運転者へ暗示する内容と、旋律を示す楽譜の変化を模式的に示すタイムチャート図である。
【図8】車両後進時のさらに別なイベント例における、運転者へ暗示する内容と、旋律を示す楽譜の変化を模式的に示すタイムチャート図である。
【発明を実施するための形態】
【0021】
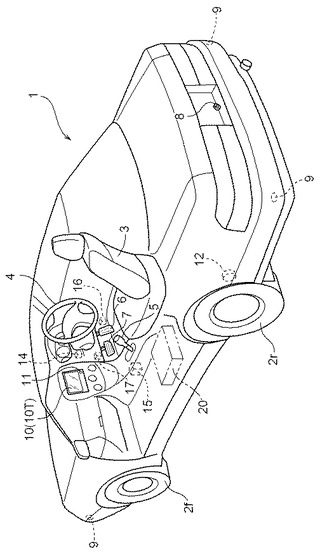
以下本発明にかかわる運転支援装置の実施形態を図面に基づいて説明する。図1に車両1の基本構成が示されている。運転席3の周辺には、回転操作力を前車輪2fに伝えて駆動操向を行うステアリング4、走行速度を制御するシフトレバー5やアクセルペダル6、前車輪2f及び後車輪2rに制動力を作用させるブレーキペダル7が配置されている。さらに、運転席3の近傍のコンソールの上部位置には表示面にタッチパネル10Tが形成されたモニタ10が備えられている。モニタ10の近くにはスピーカ11が備えられている。尚、スピーカ11はドアの内側やその他の車両内装面に設けてもよい。車両1の後端には、車両周辺を撮影する車載カメラの一例としてのバックカメラ8が設けられている。モニタ10は、バックライトを備えた液晶式のものである。もちろん、プラズマ表示型のものやCRT型のものであっても良い。また、このモニタにはタッチパネルが取り付けられており、指等の接触位置をロケーションデータとして出力する。なお、モニタ10はナビゲーションシステムの表示装置としても用いられる。
【0022】
バックカメラ8はCCD(charge coupled device)やCIS(CMOS image sensor)などの撮像素子を内蔵するとともに、撮影した情報をリアルタイムで動画情報として出力するデジタルカメラである。バックカメラ8は、例えば左右140度の視野を有する広角レンズを有し、例えば約30度の俯角を有して設置され、車両1の後方約8m程度までの領域を撮影することができる。
【0023】
ステアリング4の操作系にはステアリングセンサ14が備えられ、ステアリング操作方向と操作量とが計測される。シフトレバー5の操作系にはシフト位置センサ15が備えられ、シフト位置が判別される。アクセルペダル6の操作系にはアクセルセンサ16が備えられ、操作量が計測される。ブレーキペダル7の操作系にはブレーキセンサ17が備えられ、操作の有無などが検出される。
【0024】
また、この車両1の適当な箇所に、この実施形態では車両後面部と側面部と前面部にそれぞれ2個の衝突予知センサ9が設けられている。衝突予知センサ9は、例えば、車両の周囲に存在する障害物を検出するミリ波レーダや画像認識装置等を利用して構成される。さらに、移動距離センサとして、前車輪2f及び後車輪2rの少なくとも一方の回転量を計測する回転センサ12が備えられている。
【0025】
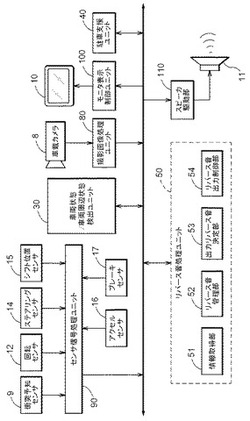
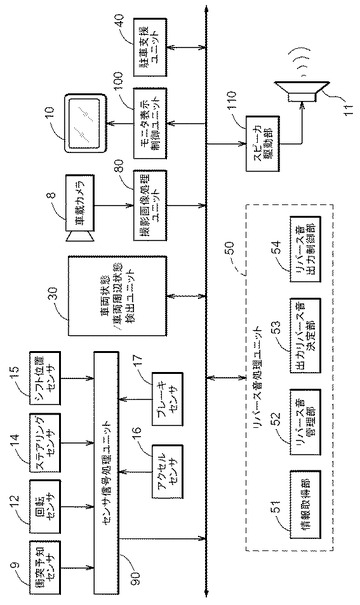
図中20は、車両1における各種電子制御を行うECU(electronic control unit)を内蔵している電子制御ボックスである。本発明に特に関係するいくつかのECUの機能を模式的に示す機能ブロック図が図2に示されている。各ECUは、コンピュータを中核要素として構成されており、そのネットワーク機能を用いて相互のデータ伝送が可能となっている。図2には、ECUとして、車両状態/車両周辺状態検出ユニット30と、駐車支援ユニット40と、センサ信号処理ユニット90と、撮影画像処理ユニット80と、モニタ表示制御ユニット100と、車両後退時にリバース音を出力して運転を支援する運転支援装置として機能するリバース音処理ユニット50とが示されている。
【0026】
センサ信号処理ユニット90は、前述した各種センサ等からの信号を内部的に演算可能なデータに変換して、そのようなデータを要求している各ECUに送信する。このセンサ信号データを受け取った各ECUは演算処理によって生成されたデータを演算結果データとしてさらにこれを要求する各ECUに送信する。例えば、リバース音処理ユニット50は、リアルタイムでの車両状態及び車両周辺状態を認識するため、センサ信号処理部90から、操舵角データや車両速度データ、駐車支援ユニット40から自動運転支援開始位置データ、車両状態/車両周辺状態検出ユニット30から障害物検出データ等を受け取る。
【0027】
車両状態/車両周辺状態検出ユニット30は、走行データ等の車両状態に関する情報、及び障害物検出データや障害物追従データや道路や駐車場などの走行路データ等の車両周辺状態に関する情報を生成する機能を有する。例えば、注意すべき走行障害物までの距離や車両1との相対位置関係は、衝突予知センサ9などのセンサ信号データに基づいて演算し、さらにはその衝突の可能性も推定することができる。もちろん、カメラ8からの撮影画像を画像処理して注意すべき対象や障害物の検知に利用することも可能である。ここで生成された障害物検知データは、駐車支援ユニット40やリバース音処理ユニット50などに送られる。
【0028】
駐車支援ユニット40自体は公知であるので、ここでは詳しく説明しないが、この駐車支援ユニット40によって作り出される機能として、駐車支援画像生成機能と、駐車目標位置設定機能と、誘導機能と、移動状態検出機能などが挙げられる。駐車支援画像生成機能によって駐車支援に関するイメージ情報が生成され、モニタ10に表示される。駐車目標位置設定機能によって、運転者は、車両1を駐車させる目標位置を設定することができる。誘導機能は、現在位置から駐車目標位置へ車両1を誘導する経路を演算する。移動状態検出機能は、誘導経路に沿って移動する車両1の移動状態を検出し、この検出結果に基づいて車両1の移動中の位置誤差が演算される。
【0029】
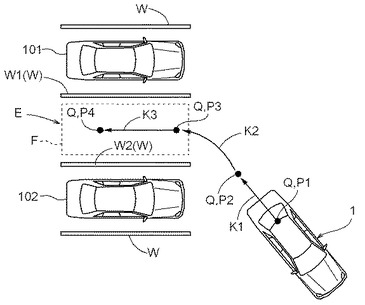
この駐車支援ユニット40を用いた駐車支援の具体例を以下に説明する。図3は、車両1を駐車枠に誘導する経路を示す説明図である。点Qは、車両1を誘導する際の基準点である。本例では、進行方向右側の駐車枠線Wで区切られた駐車枠Eに車両1を駐車する。ここでは、駐車枠線W1とW2とによって区切られた駐車枠Eに車両1を駐車する。当該駐車枠Eの両隣には、他の車両101及び102が既に駐車されている。駐車目標エリアFは駐車枠Eの中に設定される。駐車支援を受ける運転者は駐車枠Eの前方を通り過ぎて、車両1を左方向に旋回させ、車両1の後方を駐車目標エリアFに向けて停車させる。この時、車両1の基準点Qは車両位置P1にある。運転者は、駐車支援ユニット40による誘導に基づいて、車両位置P1から基準点Qが車両位置P2に達するまで車両1を真っ直ぐに後進させる(経路K1)。従って、車両位置P1は、誘導開始位置である。次に、運転者は、ステアリング4を所定の操舵角に保持し、基準点Qが車両位置P2から車両位置P3に達するまで旋回を伴って車両1をさらに後進させる(経路K2)。従って、車両位置P2は旋回開始位置であり、車両位置P3は旋回完了位置である。さらに、運転者は、ステアリング4を中立位置に戻し、基準点Qが車両位置P3から車両位置P4に達するまで車両1を真っ直ぐ後進させる(経路K3)。基準点P4は駐車目標エリアFを基準として設定された駐車目標位置である。車両1の基準点Qが車両位置P4に達すると車両1は駐車目標エリアFを含む駐車枠Eに収まって駐車される。
【0030】
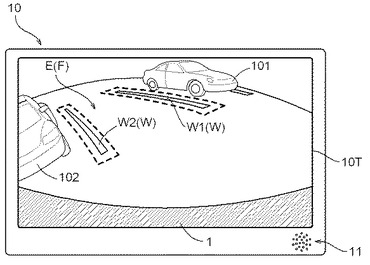
図4は、誘導開始位置P1においてバックカメラ8による撮影画像から駐車枠Eを認識して駐車目標エリアFを設定する方法を示す説明図である。上述したようにバックカメラ8は俯角をもって備えられている。従って、撮影画像には車両1の後部バンパーを含み、車両1の後方の路面(地面)が映っている。上述したように、車両1は、駐車のために、誘導開始位置P1において車両1の後方を駐車枠Eに向けて停車する。従って、バックカメラ8によって、駐車枠Eを含む情景が撮影される。例えば、駐車枠線W1及びW2を画像認識することによって、駐車枠Eを認識し、駐車目標エリアFが設定される。駐車目標エリアFが設定されると、車両位置P4の座標が駐車目標位置として設定される。駐車目標位置P4が設定されると、駐車目標位置P4と現在の誘導開始位置P1とに基づいて、車両1を駐車枠Eへ誘導する経路が演算される。つまり、図4に示したように、直進後進する経路K1及び経路K3と、旋回を伴う経路K2が演算され、各経路の接続点である車両位置P2(旋回開始位置)及び車両位置P3(旋回完了位置)の座標が演算される。
【0031】
後進中のステアリング4の状態はステアリングセンサ14によって検出され、車両1の移動距離は回転センサ12によって検出される。これらのセンサの検出結果に基づいて、車両1の移動状態が検出される。この検出結果に基づいて、誘導開始位置P1の座標から移動する車両1の基準点Qの座標が演算される。そして、この基準点Qに対応するように各駐車ガイドの表示位置が演算され、各駐車ガイドがモニタ10に表示される。このようにモニタ10に表示される駐車ガイドを参照しながら、運転者は車両1の基準点Qが駐車目標位置P4に一致するように車両1が移動することで、駐車が完了する。
【0032】
例えば、上述した駐車支援ユニット40による駐車支援時において、シフトレバー5が後進位置に入っている限り、リバース音が流れる。その際のリバース音の音色は従来と同じであるが、そのリバース音の音の流れ(旋律)は、以下に述べるように、特定音階における音の流れがもたらす音楽心理学的な考えに基づいている。リバース音処理ユニット50は、運転者になんらかの情報を与える目的でリバース音の特徴的な音の流れを作り出す。そのため、リバース音処理ユニット50は、図2に示すように、情報取得部51と、リバース音管理部52と、出力リバース音決定部53と、リバース音出力制御部54とを備えている。情報取得部51は、車両後退時にリバース音を出力して運転を支援する運転支援装置として動作する、このレバース音処理ユニット50で利用される運転支援情報として、センサ信号処理部90から操舵角データや車両速度データ、駐車支援ユニット40から自動運転支援開始位置データ、車両状態/車両周辺状態検出ユニット30から障害物検出データ等を受け取り、必要に応じて内部的に論理演算しやすいパラメータ値に変更し、適当な変数の変数値として格納する。
【0033】
リバース音管理部52は、車両に固有の通常リバース音を特定音階の主音としての役割をもつ前記主リバース音とし、この主リバース音を主音とみなした音階に属する音に対応するリバース音を音階リバース音として管理するが、例えばこの主リバース音の音声データに基づいて音階リバース音として属リバース音や下属リバース音を生成するように構成されている。
この実施の形態では、説明を簡単にするため、この車両において通常の後進時に鳴らされるリバース音が自然長音階の主音(C5:ド)とする。したがって、この主音(C5:ド)が主リバース音となる。この主リバース音を基準として、調性の基本となる主音、つまり主リバース音として用いられる。さらに、この主リバース音の音声データをこの主リバース音の音の高さによって規定される特定音階での主音とした場合の属音である属リバース音と下属音である下属リバース音とが生成される。これにより、この車両においていつも聞きなれているリバース音が主音として、その調性に基づいて何らかの運転支援情報を暗示する音の流れが出力されるので、運転者にとっては違和感が生じにくい。その5度音である属音(G5:ソ)を属リバース音として、その4度音である下属音(F5:ファ)を下属リバース音として、その7度音である導音(B5:シ)を導リバース音として、さらに1オクターブ上のオクターブ主音(C6:ド)をオクターブ主リバース音として管理される。このリバース音管理部51においては、各音データ(リバース音データ)の管理として、各音データを要求に応じて生成して送り出す構成としてもよいし、予め作製して記憶しておいて要求に応じて送り出す構成としてもよい。
【0034】
出力リバース音決定部53は、情報取得部51が受け取った運転支援情報に応じて、運転者に伝達すべき状況を音楽心理学的に暗示できるように、時系列的なリバース音の流れとしての特定音階での音の流れ(旋律)を決定するアルゴリズムを有する。つまり、音楽心理学においてドミナントモーションと呼ばれる「属音(ドミナント)から主音(トニック)に進むと解決したような安心感を得る(終止感)」という聴感上の性質を使うことで、運転者に対して現状の車両走行が安心できるものであると暗示することができる。例えば、属音(属リバース音)から主音(主リバース音)、あるいは属音(属リバース音)からオクターブ主音(オクターブ主リバース音)に進行すると安心感を与えることができ、そのまま車両走行を続行することを示唆するために好都合である。また、属音(属リバース音)から導音(導リバース音)を経てオクターブ主音(オクターブ主リバース音)に移行すると、さらに大きな安心感ないしは終止感を与えるので、例えば、後進駐車走行時の完了を示唆するために好都合である。
【0035】
これに対して、主音(主リバース音)から下属音(下属リバース音)へ移行した後に主音(主リバース音)に移行しない場合、つまりドミナントモーションによる解決が生じない場合、不安感ないしは状況が少し望まない方向に進んでいるような感覚を与えるので、例えば、後進走行時において少し走行経路がずれてしまっていることを示唆するために好都合である。
【0036】
このような特定音階での音楽心理学の理論に基づいて音の流れ(旋律)によって運転者に特定の感情を生じさせることが可能である。このことから、上述した異なる感覚を運転者に暗示する旋律に基づいて時系列的なリバース音の流れを作り出すことにより、駐車操舵支援や車両周辺障害物の接近状態などにおける、「順調かどうか?」の状況変化のみを運転者に暗示することも可能となる。従って、この実施の形態では、出力リバース音決定部53は、以下のような車両走行状況の変化と、旋律を結びつけている。
(a)順調「オーライ」:主音(主リバース音)から主音(主リバース音)への進行、つまり通常のリバース音の繰り返し。
(b)暗転「あれ?」:主音(主リバース音)から下属音(下属リバース音)への進行。
(c)好転「その調子」:属音から主音(主リバース音)への進行。
(d)完了「ストップ」:属音(属リバース音)から導音(導リバース音)を経て主音(主リバース音)への進行。
図5では、このような旋律をわかりやすくするため、これを楽譜で表示している。なお、図5の楽譜から理解できるように、各所定のリバース音群は同一周期で間欠的に繰り返される。なお、図中の音符は、リバース音の音の流れを楽譜化したものである。
【0037】
リバース音出力制御部54は、リバース音管理部52によって管理されているリバース音から出力リバース音決定部によって決定されたリバース音を選択して受け取り、所定のタイミング(テンポ)でリバース音をスピーカ11で鳴らすために、このリバース音データをスピーカ駆動部110に出力する。
【0038】
次に、車両後退における3種類のイベント進行と、その際に運転者に暗示したい内容の変化と、その暗示したい内容の変化に対応する旋律の移り変わりを、それぞれ図6、図7、図8を用いて説明する。図6、図7、図8では、運転者に暗示したい内容の変化、スピーカ11から鳴らされるリバース音群の楽譜と、時間軸、イベント進行の流れが、タイムチャートの形態で示されている。
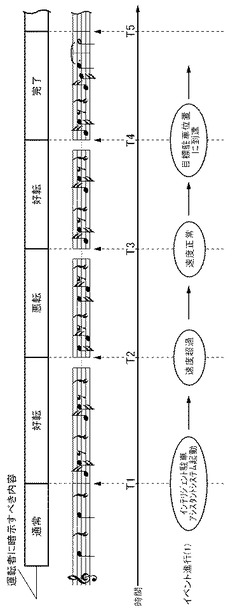
図6で示されているイベント進行(1)は、駐車時に操舵角を自動制御することで運転者の駐車操作を支援するインテリジェント駐車アシスタントシステムなどでシステムが制御する運転支援時において発生するものであり、ここではシステムが想定している支援速度の許容範囲に対して自車速度が適正かどうかを運転者に暗示している。
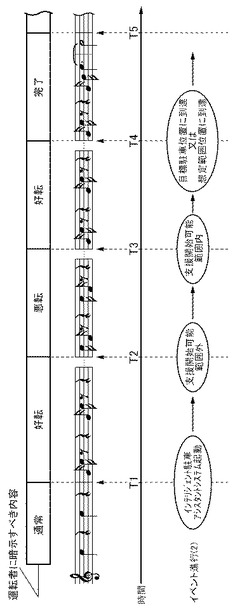
図7で示されているイベント進行(2)は、インテリジェント駐車アシスタントシステムなどでシステムが制御する運転支援時において発生するものであり、システムが想定している支援開始位置の許容範囲に対して自車位置が適正かどうかを運転者に暗示している。
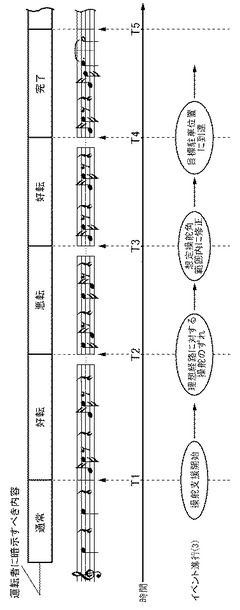
図8で示されているイベント進行(3)は、目標駐車位置までの理想経路に対する操舵角のずれ、又は自車位置のずれや速度のずれを運転者に伝える駐車支援システムなどで発生するもので、理想経路と操舵角とのずれを運転者に暗示している。
【0039】
図6、図7、図8に示された各イベント進行における、運転者に暗示したい内容の変化、その暗示したい内容の変化に対応する旋律の移り変わりを、以下に共通的に説明する。
まず、最初は通常のリバース音である主リバース音が繰り返して鳴らされる。
次に、T1のタイミングで、イベント進行(1)と(2)ではインテリジェント駐車アシスタントシステムが起動し、イベント進行(3)では、操舵支援が開始される。このT1の時点から、好転を暗示する属音から主音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。
続いて、T2のタイミングで、イベント進行(1)では「速度超過であることが検出され」、イベント進行(2)では「支援開始可能範囲外であることが検出され」、イベント進行(3)では「理想経路に対する操舵のずれが検出され」る。従って、このT2の時点から、暗転を暗示する主音から下属音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。
さらに、T3のタイミングで、イベント進行(1)では「速度正常であることが検出され」、イベント進行(2)では「支援開始可能範囲内に戻ったことが検出され」、イベント進行(3)では「想定操舵角範囲内に修正されたことが検出され」る。従って、このT3の時点から、再び好転を暗示する属音から主音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。
さらに、T4のタイミングで、イベント進行(1)では「目標駐車位置に到達したことが検出され」、イベント進行(2)では「目標駐車位置に到達したことまたは想定範囲位置に到達したこと検出され」、イベント進行(3)では「想定操舵角範囲内に修正されたことが検出され」る。従って、このT4の時点から、完了を暗示する属音から導音を経ての主音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。完了を暗示するリバース音群がT5の時点まで所定回繰り返されると、シフトレバーが後進位置から離脱するまで通常のリバース音が繰り返される。
【0040】
また、図を用いた説明は省略されるが、車両進路上の障害物の接近状況に応じて、「暗転」「好転」を使いわけながら、障害物の接近状況を運転者に暗示することも可能である。
【0041】
このように、本発明による運転支援装置では、聞きなれたリバース音をベースとして、運転者に伝達すべき状況を音楽心理学的に暗示できるように、特定音階での音の流れ(旋律)を作り出していくので、ほとんど無意識的に状況の変化を暗示させることができる。また、音楽的親和度の高い音との組み合わせによって耳障りではなくなるため、うるささや煩わしさを感じさせずに、“暗転”などの好ましくない状況から“好転”するまでの長い時間の状況変化を報知することができる。鳴らされるリバース音は、普段から聴きなれている音色であり、その時系列的な音の高さだけが変化しているだけなので、長い時間聞かされても違和感がなく、危険な状況が確定する前に早い段階において注意喚起を行う事が可能になる。
【0042】
〔その他の実施の形態〕
(1)上述した実施の形態では、リバース音群は単音であったが、主和音もしくは分散和音を取り入れてもよい。
(2)ベースとなるリバース音の音色は任意に選択できるようにしてもよい。その際、選択されたリバース音を主音としてその音色で属音、下属音、導音等が用意される。
(3)上述した実施の形態では、リバース音群が作り出す音階の流れを旋律として表現していた。しかしながら、本発明においては、単に旋律だけで運転者に伝達すべき状況を音楽心理学的に暗示することに限定されるわけではない。例えば、音階の流れの速さ、つまり音楽におけるテンポを運転者に伝達すべき状況に応じて変化させることや、各リバース音を表している各音符の時間長さによって作り出される音楽リズムを運転者に伝達すべき状況に応じて変化させることもその権利範囲に含まれている。つまり、出力リバース音決定部によって決定された音階の流れという技術概念には、特定音階における旋律だけでなく、テンポやリズムも含まれている。
【符号の説明】
【0043】
8 バックカメラ
10 モニタ
11 スピーカ
40 駐車支援ユニット
50 リバース音処理ユニット(運転支援装置)
51 情報取得部
52 リバース音管理部
53 出力リバース音決定部
54 リバース音出力制御部
【技術分野】
【0001】
本発明は、車両状態及び車両周辺状態を含む運転支援情報を音を通じて運転者に報知することで車両後退時の運転を支援する運転支援装置に関する。
【背景技術】
【0002】
自動車技術の分野では、その運転支援システムにおいて、報知音の音色を変化させる事によって運転者に周辺状況の変化を伝える多くの技術が知られており、最も一般的なものとしては、車両周辺の障害物となる物体との距離や危険度に応じて、報知音の周波数や音量、あるいは報知間隔を変化させる方法が広く使用されている。
【0003】
一方、車両の周囲の障害物となる検知した物体の位置及び方向を、警報音の音像を変化させるによって運転者に警告する立体音場警報装置が提案されている(例えば、特許文献1参照。)この装置では、警報音の音像を障害物の方向に定位させ、さらに警報優先度に応じて警報音を変化させる事によって、運転者が障害物の方向へ視線を向けるように誘導する方法が開示されている。
【0004】
また、上述したような障害物の位置を報知するだけでなく、音像の変化によって駐車操作の支援を目的とした経路誘導を行う装置も提案されている(特許文献2参照)。この装置では、目標駐車位置に対して自車両が傾いているとき、傾きに応じて各近接部位側に設定された基本定位位置間を往復動するような音響信号を出力し、この音響信号で生成される音像により目標駐車位置に対する自車両の位置関係を示す方法が開示されている。
【0005】
さらに、騒音環境下でも容易に識別でき、運転操作時の運転者のストレスを軽減する事を目的として、所定の操作の開始と終了とをビープ音などの単音を用いずに和音によって教示する装置が提案されている(特許文献3参照)。この装置では、操作の開始の教示として第1和音を出力し、終了の教示として第1和音とは異なる第2和音を出力するとともに、所定の操作に対する運転者の操作が教示と異なる場合に、第3和音として不協和音を出力する方法が開示されている。 また、この特許文献3には、開始の教示としての第1和音の出力は、終了の教示が行なわれるまで断続して行なわれ、終了に近づくにつれて断続周期が短縮される方法も開示されている。 また、主和音(ドミソ)に対する属音(ソシレ)を鳴らして運転操作の開始をし、所定の停止位置付近に至るまでの断続周期を短くしながら鳴らし続けるとともに、停止位置付近に至ると、主和音(ドミソ)を鳴らすことで運転者に運転操作の終結感を与える方法も開示されている。
【0006】
また、運転者の危険な運転に対して、不安定のある警告音によって緊張感を効果的に与える事を目的として、安心感のある和音と不安定感を感じる和音とを使い分けて報知を行なう方法が提案されている(特許文献4参照)。
この装置では、安定感を感じさせる警告音としてメジャースケールで構成する音階又は和音を用い、また不安定感を感じさせる警報音としてディミニッシュスケールやオーギュメントスケールで構成する音階又は和音が用いられる方法が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許2689792号公報(段落番号0014−0038、図2)
【特許文献2】特許2959326号公報(段落番号0021−0026、図2)
【特許文献3】特許4066698号公報(段落番号0006、0032−0033、図1)
【特許文献4】特開平11−208370号公報(段落番号0006−0041、図1)
【発明の概要】
【発明が解決しようとする課題】
【0008】
報知音の周波数や音量、あるいは報知間隔を変化させることによって周囲の状況変化を伝える方法では、運転者は変化する前の音を記憶した後に、変化した後の音とを比較して聞き分ける必要があるため、瞬時に周囲の変化を知覚することは困難である。よって、視線を向けなくてもすむが、音の変化を知覚しようとする意識をある一定時間持続させる必要があるために周囲への注意がおろそかになる可能性がある。さらに、音を鳴らし続ける場合、運転者がその継続する音を騒がしく感じるという可能性や、逆にその音に運転者が順応してしまい音の変化に対する方向感や距離感を認知しなくなる可能性がある。しかも、周囲の環境の変化に応じて、音に関する可変パラメータがどの程度変化するのかのルールを運転者があらかじめ理解しておく必要があり、知覚した音の変化の度合いに対して実際の周囲の状況変化が一致するようになるには、ある程度実際システムを使用してみて確認しながら理解してゆく必要があり、慣れるまでに時間がかかるという問題がある。
【0009】
特許文献1や特許文献2のような報知音の音像を変化させる方法は、複数のスピーカを用いて警告音の空間定位を変化させなければならないため、その装置が大掛かりとなる。また、自動車の車内という特殊な音響条件下のため、空間定位の精度に限界があり、ぼんやりとしたおおよその方向感や距離感をつかむことしかできず、瞬時に接近物の位置を明確に伝えることが難しい。また、運転者の体の向きによって知覚する位置精度が低下してしまい、音源として単なるピー音(正弦波)を使用した場合では音の方向性の判別が難しく、いずれの方向から鳴っているのかが瞬時には判別できないという欠点もある。
【0010】
特許文献3による運転支援装置では、単音ではなく和音を使用する事を提案しており、同音量であると仮定すれば単音に比べて和音のほうが識別性を向上させる事は期待できる。しかし、単に和音として同じ音源を同時に複数鳴らすだけでは、単音の場合に比べて運転者のストレスを軽減できるとは限らない。むしろ、識別性が上がり印象強く知覚される分だけ刺激が強くなり音が目立ちすぎるため、長い時間継続して鳴らされると運転者にとってはかえって煩わしく感じさせる可能性がある。
また、特許文献3では、状況の変化を表現するために、和音を鳴らすテンポを変化させるか、あるいは各単音を半音又は全音ずつずらしていくことを提案しているが、このように音に関するパラメータを少しずつ変化させて報知する手法は、上述で指摘した「運転者は変化する前の音を記憶した後に、変化した後の音とを比較して聞き分ける必要があるため、瞬時に周囲の変化を知覚することは困難である。」という同様の問題がある。
また、特許文献3では、属和音から主和音へのコード進行を活用して運転操作の終了を予期させる方法が開示されており、音楽理論に基づいたドミナントモーションと呼ばれる終止感の演出効果は期待できる。しかしながら、和音を鳴らす順番が属和音から主和音への一方通行に限定されているために、終了に到達するまでは属和音しか使用できず、もし停止までに時間がかかる場合には、結果的に同じ属和音を継続して鳴らし続ける事になる。あまりにも同じ属和音が続くと、基準となる主和音の記憶が薄まるために属和音で安定してしまい、主和音への終止への期待感を感じなくなる可能性がある。
【0011】
特許文献4による車両走行支援装置では、不協和音やマイナー系和音で緊急感を伝える報知方法を採用している。しかし、危険が確定しているわけでもない状況において、心地よくない音を頻繁に鳴らすことは運転者や同乗者にとっては不愉快でもあり、特に認知支援や注意喚起などのような危険が確定する前の予兆を報知するための利用には不適である。
【0012】
上記実情に鑑み、本発明の目的は、最終的に達成したい操作目標に対する進捗状況を暗示的に音を用いて簡単かつ効果的に報知する運転支援装置を提供することである。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明に係る運転支援装置は車両後退時にリバース音を出力して運転を支援するものであり、その特徴構成は、車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部と、前記リバース音を主音とみなした音階に属する音に対応するリバース音を音階リバース音として管理するリバース音管理部と、前記運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部と、前記リバース音管理部によって管理されているリバース音から前記出力リバース音決定部によって決定された前記音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部とを備えていることである。
【0014】
この構成では、従来から車両後退時に鳴らされるリバース音として採用されている音を主音とみなした自然長音階音や自然短音階などに属する音に対応するリバース音を音階リバース音が用意され、リバース管理部に管理されている。さらに、本発明の重要な機能部である出力リバース音決定部は、運転支援情報に応じて車両後退時に鳴らしていくリバース音を順次決定していくが、その決定アルゴリズムは音楽心理学の理論に基づいている。順次鳴らされていくリバース音列はいわゆる旋律を作り出すが、この旋律によって運転者が暗示されるものはその時点で得られている運転支援情報に基づくものに対応している。つまり、出力リバース音決定部の働きにより、順次出力されるリバース音の流れ(旋律)が、例えば、予め設定された音階における属音(ドミナント)から主音(トニック)へ移行するドミナントモーションに基づくものであれば、具体的には、「ソ」から「ド」への音の流れでリバース音を鳴らすことで、終止感、つまり安心感を運転者に与えることになる。これにより、単純にリバース音列を時系列で鳴らすような簡単な構成であるにもかかわらず、運転者に何らかの運転状況が暗示されることになる。
【0015】
さらに、本発明では、通常よく使われているリバース音を主音とする音階に属する音を他のリバース音として利用しているので、実際に出力されるリバース音の流れ(旋律)に違和感がなく、それを聞く煩わしさもなく、音楽心理学の理論に基づいて出力すべき音(リバース音)を決定していることから、そのほど意識せず瞬時に「安定から緊張」、「緊張から安定」といった感覚の変化を受け入れることができる。また、音像定位などのように複数スピーカやステレオ処理系などは不必要となり、コスト的に有利である。
【0016】
本発明に係るにおける特徴構成として、前記リバース音出力制御部は、前記特定された音階に基づく所定の時系列的な音の流れを作り出しているリバース音群を、同一周期で間欠的に出力することも好適である。この構成では、特定の運転支援情報、例えば最適な駐車走行軌跡に入りつつあるという情報に基づいて決定されたドミナントモーションを実現する「ソ」から「ド」へのリバース音の流れとしてのリバース音群が、同一周期(同一間隔)で鳴らすので、その音楽テンポが同じとなり、それを聞く側に違和感が生じにくい。
【0017】
本発明に係るにおけるより具体的な特徴構成として、前記出力リバース音決定部が、前記運転支援情報に応じて車両状態及び車両周辺状態の悪化傾向と良化傾向とを判定し、悪化傾向の判定時には主音から下属音、あるいは主音から属音となる音階の流れを決定し、良化傾向の判定時には下属音から主音、あるいは属音から主音となる音階の流れを決定するように構成することも好適である。ここで、悪化傾向とは、ある理想的な状態から外れていく傾向であり、例えば、目標走行ラインから車両が外れていく状態や障害物が自車に接近してくる状態である。また、良化傾向とは、ある理想的な状態に向かっている傾向であり、例えば、目標走行ラインに車両が近づいていく状態や障害物が自車から遠ざかっていく状態である。
この構成では、出力リバース音決定部は、運転支援情報に応じて実行中の車両後退における状況の時系列的な変化を評価し、その変化が良化傾向、悪化傾向、あるいは無変化(良化傾向でも悪化傾向でもない状態)、と判定する。例を挙げると、後進駐車走行時において、運転支援システムが想定した速度範囲内であれば良化傾向にあると判定し、下属和音から主和音あるいは属和音から主和音となる音階の流れを作り出し、運転者に安定感を感じさせる。逆に速度が超過した場合には悪化傾向にあると判定し、主和音から下属和音となる音階の流れを作り出し、運転者に不安を感じさせる音の流れを作り出す。これにより、このままでよいといった「好転している感覚(良化傾向)」や何かこのままではまずいといった「暗転している感覚(悪化傾向)」を運転者に暗示することが可能となる。その際、運転者は、リバース音の時系列的な流れであるリバース音群に割り当てられている特別な意味を前もって学習しておく必要はない。
【0018】
本発明の好適な実施形態の1つでは、前記リバース音管理部は、車両に固有の通常リバース音を特定音階の主音としての役割をもつ前記主リバース音とし、この主リバース音の音データに基づいて前記属音に対応する属リバース音と前記下属音に対応する下属リバース音とを生成するように構成されている。この構成では、この車両において通常の後進時に鳴らされるリバース音が基本となる主音、つまり主リバース音として用いられる。さらに、この主リバース音の音データを基準として、この主リバース音の音の高さによって規定される特定音階での主音とした場合の属リバース音と下属リバース音との音データが生成される。これにより、この車両で通常鳴らされているリバース音が主音として、その音階の音楽心理学的な理論に基づいて何らかの運転支援情報を暗示する音の流れが出力されるので、運転者にとっては違和感が生じにくい。
【0019】
なお、本発明の好適な実施の形態の1つでは、リバース音をどのような音階の流れで鳴らすかを決定するために用いられる前記車両状態及び車両周辺状態は、操舵角データ、自車位置データ、車両速度データ、障害物検出データによって直接求められる状態もしくはこれらのデータの組み合わせによって間接的に求められる状態である。この求められた状態から、目標駐車位置までの支援速度許容範囲に対する自車速度のずれ、目標駐車位置までの理想経路に対する操舵角のずれ、駐車支援開始位置の許容範囲に対する自車位置のずれ、車両進路上の障害物の接近といった状況をこの運転支援装置は認識することができる。
【図面の簡単な説明】
【0020】
【図1】車両の一部を切り欠いて運転席を見た斜視図である。
【図2】本発明の運転支援装置の1つの実施形態であるリバース音処理ユニットとこれに連携 する各ユニットとの機能を示す機能ブロック図である。
【図3】車両を駐車枠に誘導する経路を示す説明図である。
【図4】バックカメラによる撮影画像から駐車目標エリアを設定する方法を示す説明図である。
【図5】運転者へ暗示する内容と、旋律を示す楽譜との関係を示す説明図である。
【図6】車両後進時の1つのイベント例における、運転者へ暗示する内容と、旋律を示す楽譜の変化を模式的に示すタイムチャート図である。
【図7】車両後進時の別なイベント例における、運転者へ暗示する内容と、旋律を示す楽譜の変化を模式的に示すタイムチャート図である。
【図8】車両後進時のさらに別なイベント例における、運転者へ暗示する内容と、旋律を示す楽譜の変化を模式的に示すタイムチャート図である。
【発明を実施するための形態】
【0021】
以下本発明にかかわる運転支援装置の実施形態を図面に基づいて説明する。図1に車両1の基本構成が示されている。運転席3の周辺には、回転操作力を前車輪2fに伝えて駆動操向を行うステアリング4、走行速度を制御するシフトレバー5やアクセルペダル6、前車輪2f及び後車輪2rに制動力を作用させるブレーキペダル7が配置されている。さらに、運転席3の近傍のコンソールの上部位置には表示面にタッチパネル10Tが形成されたモニタ10が備えられている。モニタ10の近くにはスピーカ11が備えられている。尚、スピーカ11はドアの内側やその他の車両内装面に設けてもよい。車両1の後端には、車両周辺を撮影する車載カメラの一例としてのバックカメラ8が設けられている。モニタ10は、バックライトを備えた液晶式のものである。もちろん、プラズマ表示型のものやCRT型のものであっても良い。また、このモニタにはタッチパネルが取り付けられており、指等の接触位置をロケーションデータとして出力する。なお、モニタ10はナビゲーションシステムの表示装置としても用いられる。
【0022】
バックカメラ8はCCD(charge coupled device)やCIS(CMOS image sensor)などの撮像素子を内蔵するとともに、撮影した情報をリアルタイムで動画情報として出力するデジタルカメラである。バックカメラ8は、例えば左右140度の視野を有する広角レンズを有し、例えば約30度の俯角を有して設置され、車両1の後方約8m程度までの領域を撮影することができる。
【0023】
ステアリング4の操作系にはステアリングセンサ14が備えられ、ステアリング操作方向と操作量とが計測される。シフトレバー5の操作系にはシフト位置センサ15が備えられ、シフト位置が判別される。アクセルペダル6の操作系にはアクセルセンサ16が備えられ、操作量が計測される。ブレーキペダル7の操作系にはブレーキセンサ17が備えられ、操作の有無などが検出される。
【0024】
また、この車両1の適当な箇所に、この実施形態では車両後面部と側面部と前面部にそれぞれ2個の衝突予知センサ9が設けられている。衝突予知センサ9は、例えば、車両の周囲に存在する障害物を検出するミリ波レーダや画像認識装置等を利用して構成される。さらに、移動距離センサとして、前車輪2f及び後車輪2rの少なくとも一方の回転量を計測する回転センサ12が備えられている。
【0025】
図中20は、車両1における各種電子制御を行うECU(electronic control unit)を内蔵している電子制御ボックスである。本発明に特に関係するいくつかのECUの機能を模式的に示す機能ブロック図が図2に示されている。各ECUは、コンピュータを中核要素として構成されており、そのネットワーク機能を用いて相互のデータ伝送が可能となっている。図2には、ECUとして、車両状態/車両周辺状態検出ユニット30と、駐車支援ユニット40と、センサ信号処理ユニット90と、撮影画像処理ユニット80と、モニタ表示制御ユニット100と、車両後退時にリバース音を出力して運転を支援する運転支援装置として機能するリバース音処理ユニット50とが示されている。
【0026】
センサ信号処理ユニット90は、前述した各種センサ等からの信号を内部的に演算可能なデータに変換して、そのようなデータを要求している各ECUに送信する。このセンサ信号データを受け取った各ECUは演算処理によって生成されたデータを演算結果データとしてさらにこれを要求する各ECUに送信する。例えば、リバース音処理ユニット50は、リアルタイムでの車両状態及び車両周辺状態を認識するため、センサ信号処理部90から、操舵角データや車両速度データ、駐車支援ユニット40から自動運転支援開始位置データ、車両状態/車両周辺状態検出ユニット30から障害物検出データ等を受け取る。
【0027】
車両状態/車両周辺状態検出ユニット30は、走行データ等の車両状態に関する情報、及び障害物検出データや障害物追従データや道路や駐車場などの走行路データ等の車両周辺状態に関する情報を生成する機能を有する。例えば、注意すべき走行障害物までの距離や車両1との相対位置関係は、衝突予知センサ9などのセンサ信号データに基づいて演算し、さらにはその衝突の可能性も推定することができる。もちろん、カメラ8からの撮影画像を画像処理して注意すべき対象や障害物の検知に利用することも可能である。ここで生成された障害物検知データは、駐車支援ユニット40やリバース音処理ユニット50などに送られる。
【0028】
駐車支援ユニット40自体は公知であるので、ここでは詳しく説明しないが、この駐車支援ユニット40によって作り出される機能として、駐車支援画像生成機能と、駐車目標位置設定機能と、誘導機能と、移動状態検出機能などが挙げられる。駐車支援画像生成機能によって駐車支援に関するイメージ情報が生成され、モニタ10に表示される。駐車目標位置設定機能によって、運転者は、車両1を駐車させる目標位置を設定することができる。誘導機能は、現在位置から駐車目標位置へ車両1を誘導する経路を演算する。移動状態検出機能は、誘導経路に沿って移動する車両1の移動状態を検出し、この検出結果に基づいて車両1の移動中の位置誤差が演算される。
【0029】
この駐車支援ユニット40を用いた駐車支援の具体例を以下に説明する。図3は、車両1を駐車枠に誘導する経路を示す説明図である。点Qは、車両1を誘導する際の基準点である。本例では、進行方向右側の駐車枠線Wで区切られた駐車枠Eに車両1を駐車する。ここでは、駐車枠線W1とW2とによって区切られた駐車枠Eに車両1を駐車する。当該駐車枠Eの両隣には、他の車両101及び102が既に駐車されている。駐車目標エリアFは駐車枠Eの中に設定される。駐車支援を受ける運転者は駐車枠Eの前方を通り過ぎて、車両1を左方向に旋回させ、車両1の後方を駐車目標エリアFに向けて停車させる。この時、車両1の基準点Qは車両位置P1にある。運転者は、駐車支援ユニット40による誘導に基づいて、車両位置P1から基準点Qが車両位置P2に達するまで車両1を真っ直ぐに後進させる(経路K1)。従って、車両位置P1は、誘導開始位置である。次に、運転者は、ステアリング4を所定の操舵角に保持し、基準点Qが車両位置P2から車両位置P3に達するまで旋回を伴って車両1をさらに後進させる(経路K2)。従って、車両位置P2は旋回開始位置であり、車両位置P3は旋回完了位置である。さらに、運転者は、ステアリング4を中立位置に戻し、基準点Qが車両位置P3から車両位置P4に達するまで車両1を真っ直ぐ後進させる(経路K3)。基準点P4は駐車目標エリアFを基準として設定された駐車目標位置である。車両1の基準点Qが車両位置P4に達すると車両1は駐車目標エリアFを含む駐車枠Eに収まって駐車される。
【0030】
図4は、誘導開始位置P1においてバックカメラ8による撮影画像から駐車枠Eを認識して駐車目標エリアFを設定する方法を示す説明図である。上述したようにバックカメラ8は俯角をもって備えられている。従って、撮影画像には車両1の後部バンパーを含み、車両1の後方の路面(地面)が映っている。上述したように、車両1は、駐車のために、誘導開始位置P1において車両1の後方を駐車枠Eに向けて停車する。従って、バックカメラ8によって、駐車枠Eを含む情景が撮影される。例えば、駐車枠線W1及びW2を画像認識することによって、駐車枠Eを認識し、駐車目標エリアFが設定される。駐車目標エリアFが設定されると、車両位置P4の座標が駐車目標位置として設定される。駐車目標位置P4が設定されると、駐車目標位置P4と現在の誘導開始位置P1とに基づいて、車両1を駐車枠Eへ誘導する経路が演算される。つまり、図4に示したように、直進後進する経路K1及び経路K3と、旋回を伴う経路K2が演算され、各経路の接続点である車両位置P2(旋回開始位置)及び車両位置P3(旋回完了位置)の座標が演算される。
【0031】
後進中のステアリング4の状態はステアリングセンサ14によって検出され、車両1の移動距離は回転センサ12によって検出される。これらのセンサの検出結果に基づいて、車両1の移動状態が検出される。この検出結果に基づいて、誘導開始位置P1の座標から移動する車両1の基準点Qの座標が演算される。そして、この基準点Qに対応するように各駐車ガイドの表示位置が演算され、各駐車ガイドがモニタ10に表示される。このようにモニタ10に表示される駐車ガイドを参照しながら、運転者は車両1の基準点Qが駐車目標位置P4に一致するように車両1が移動することで、駐車が完了する。
【0032】
例えば、上述した駐車支援ユニット40による駐車支援時において、シフトレバー5が後進位置に入っている限り、リバース音が流れる。その際のリバース音の音色は従来と同じであるが、そのリバース音の音の流れ(旋律)は、以下に述べるように、特定音階における音の流れがもたらす音楽心理学的な考えに基づいている。リバース音処理ユニット50は、運転者になんらかの情報を与える目的でリバース音の特徴的な音の流れを作り出す。そのため、リバース音処理ユニット50は、図2に示すように、情報取得部51と、リバース音管理部52と、出力リバース音決定部53と、リバース音出力制御部54とを備えている。情報取得部51は、車両後退時にリバース音を出力して運転を支援する運転支援装置として動作する、このレバース音処理ユニット50で利用される運転支援情報として、センサ信号処理部90から操舵角データや車両速度データ、駐車支援ユニット40から自動運転支援開始位置データ、車両状態/車両周辺状態検出ユニット30から障害物検出データ等を受け取り、必要に応じて内部的に論理演算しやすいパラメータ値に変更し、適当な変数の変数値として格納する。
【0033】
リバース音管理部52は、車両に固有の通常リバース音を特定音階の主音としての役割をもつ前記主リバース音とし、この主リバース音を主音とみなした音階に属する音に対応するリバース音を音階リバース音として管理するが、例えばこの主リバース音の音声データに基づいて音階リバース音として属リバース音や下属リバース音を生成するように構成されている。
この実施の形態では、説明を簡単にするため、この車両において通常の後進時に鳴らされるリバース音が自然長音階の主音(C5:ド)とする。したがって、この主音(C5:ド)が主リバース音となる。この主リバース音を基準として、調性の基本となる主音、つまり主リバース音として用いられる。さらに、この主リバース音の音声データをこの主リバース音の音の高さによって規定される特定音階での主音とした場合の属音である属リバース音と下属音である下属リバース音とが生成される。これにより、この車両においていつも聞きなれているリバース音が主音として、その調性に基づいて何らかの運転支援情報を暗示する音の流れが出力されるので、運転者にとっては違和感が生じにくい。その5度音である属音(G5:ソ)を属リバース音として、その4度音である下属音(F5:ファ)を下属リバース音として、その7度音である導音(B5:シ)を導リバース音として、さらに1オクターブ上のオクターブ主音(C6:ド)をオクターブ主リバース音として管理される。このリバース音管理部51においては、各音データ(リバース音データ)の管理として、各音データを要求に応じて生成して送り出す構成としてもよいし、予め作製して記憶しておいて要求に応じて送り出す構成としてもよい。
【0034】
出力リバース音決定部53は、情報取得部51が受け取った運転支援情報に応じて、運転者に伝達すべき状況を音楽心理学的に暗示できるように、時系列的なリバース音の流れとしての特定音階での音の流れ(旋律)を決定するアルゴリズムを有する。つまり、音楽心理学においてドミナントモーションと呼ばれる「属音(ドミナント)から主音(トニック)に進むと解決したような安心感を得る(終止感)」という聴感上の性質を使うことで、運転者に対して現状の車両走行が安心できるものであると暗示することができる。例えば、属音(属リバース音)から主音(主リバース音)、あるいは属音(属リバース音)からオクターブ主音(オクターブ主リバース音)に進行すると安心感を与えることができ、そのまま車両走行を続行することを示唆するために好都合である。また、属音(属リバース音)から導音(導リバース音)を経てオクターブ主音(オクターブ主リバース音)に移行すると、さらに大きな安心感ないしは終止感を与えるので、例えば、後進駐車走行時の完了を示唆するために好都合である。
【0035】
これに対して、主音(主リバース音)から下属音(下属リバース音)へ移行した後に主音(主リバース音)に移行しない場合、つまりドミナントモーションによる解決が生じない場合、不安感ないしは状況が少し望まない方向に進んでいるような感覚を与えるので、例えば、後進走行時において少し走行経路がずれてしまっていることを示唆するために好都合である。
【0036】
このような特定音階での音楽心理学の理論に基づいて音の流れ(旋律)によって運転者に特定の感情を生じさせることが可能である。このことから、上述した異なる感覚を運転者に暗示する旋律に基づいて時系列的なリバース音の流れを作り出すことにより、駐車操舵支援や車両周辺障害物の接近状態などにおける、「順調かどうか?」の状況変化のみを運転者に暗示することも可能となる。従って、この実施の形態では、出力リバース音決定部53は、以下のような車両走行状況の変化と、旋律を結びつけている。
(a)順調「オーライ」:主音(主リバース音)から主音(主リバース音)への進行、つまり通常のリバース音の繰り返し。
(b)暗転「あれ?」:主音(主リバース音)から下属音(下属リバース音)への進行。
(c)好転「その調子」:属音から主音(主リバース音)への進行。
(d)完了「ストップ」:属音(属リバース音)から導音(導リバース音)を経て主音(主リバース音)への進行。
図5では、このような旋律をわかりやすくするため、これを楽譜で表示している。なお、図5の楽譜から理解できるように、各所定のリバース音群は同一周期で間欠的に繰り返される。なお、図中の音符は、リバース音の音の流れを楽譜化したものである。
【0037】
リバース音出力制御部54は、リバース音管理部52によって管理されているリバース音から出力リバース音決定部によって決定されたリバース音を選択して受け取り、所定のタイミング(テンポ)でリバース音をスピーカ11で鳴らすために、このリバース音データをスピーカ駆動部110に出力する。
【0038】
次に、車両後退における3種類のイベント進行と、その際に運転者に暗示したい内容の変化と、その暗示したい内容の変化に対応する旋律の移り変わりを、それぞれ図6、図7、図8を用いて説明する。図6、図7、図8では、運転者に暗示したい内容の変化、スピーカ11から鳴らされるリバース音群の楽譜と、時間軸、イベント進行の流れが、タイムチャートの形態で示されている。
図6で示されているイベント進行(1)は、駐車時に操舵角を自動制御することで運転者の駐車操作を支援するインテリジェント駐車アシスタントシステムなどでシステムが制御する運転支援時において発生するものであり、ここではシステムが想定している支援速度の許容範囲に対して自車速度が適正かどうかを運転者に暗示している。
図7で示されているイベント進行(2)は、インテリジェント駐車アシスタントシステムなどでシステムが制御する運転支援時において発生するものであり、システムが想定している支援開始位置の許容範囲に対して自車位置が適正かどうかを運転者に暗示している。
図8で示されているイベント進行(3)は、目標駐車位置までの理想経路に対する操舵角のずれ、又は自車位置のずれや速度のずれを運転者に伝える駐車支援システムなどで発生するもので、理想経路と操舵角とのずれを運転者に暗示している。
【0039】
図6、図7、図8に示された各イベント進行における、運転者に暗示したい内容の変化、その暗示したい内容の変化に対応する旋律の移り変わりを、以下に共通的に説明する。
まず、最初は通常のリバース音である主リバース音が繰り返して鳴らされる。
次に、T1のタイミングで、イベント進行(1)と(2)ではインテリジェント駐車アシスタントシステムが起動し、イベント進行(3)では、操舵支援が開始される。このT1の時点から、好転を暗示する属音から主音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。
続いて、T2のタイミングで、イベント進行(1)では「速度超過であることが検出され」、イベント進行(2)では「支援開始可能範囲外であることが検出され」、イベント進行(3)では「理想経路に対する操舵のずれが検出され」る。従って、このT2の時点から、暗転を暗示する主音から下属音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。
さらに、T3のタイミングで、イベント進行(1)では「速度正常であることが検出され」、イベント進行(2)では「支援開始可能範囲内に戻ったことが検出され」、イベント進行(3)では「想定操舵角範囲内に修正されたことが検出され」る。従って、このT3の時点から、再び好転を暗示する属音から主音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。
さらに、T4のタイミングで、イベント進行(1)では「目標駐車位置に到達したことが検出され」、イベント進行(2)では「目標駐車位置に到達したことまたは想定範囲位置に到達したこと検出され」、イベント進行(3)では「想定操舵角範囲内に修正されたことが検出され」る。従って、このT4の時点から、完了を暗示する属音から導音を経ての主音への旋律が決定され、この旋律に対応するリバース音が鳴らされる。完了を暗示するリバース音群がT5の時点まで所定回繰り返されると、シフトレバーが後進位置から離脱するまで通常のリバース音が繰り返される。
【0040】
また、図を用いた説明は省略されるが、車両進路上の障害物の接近状況に応じて、「暗転」「好転」を使いわけながら、障害物の接近状況を運転者に暗示することも可能である。
【0041】
このように、本発明による運転支援装置では、聞きなれたリバース音をベースとして、運転者に伝達すべき状況を音楽心理学的に暗示できるように、特定音階での音の流れ(旋律)を作り出していくので、ほとんど無意識的に状況の変化を暗示させることができる。また、音楽的親和度の高い音との組み合わせによって耳障りではなくなるため、うるささや煩わしさを感じさせずに、“暗転”などの好ましくない状況から“好転”するまでの長い時間の状況変化を報知することができる。鳴らされるリバース音は、普段から聴きなれている音色であり、その時系列的な音の高さだけが変化しているだけなので、長い時間聞かされても違和感がなく、危険な状況が確定する前に早い段階において注意喚起を行う事が可能になる。
【0042】
〔その他の実施の形態〕
(1)上述した実施の形態では、リバース音群は単音であったが、主和音もしくは分散和音を取り入れてもよい。
(2)ベースとなるリバース音の音色は任意に選択できるようにしてもよい。その際、選択されたリバース音を主音としてその音色で属音、下属音、導音等が用意される。
(3)上述した実施の形態では、リバース音群が作り出す音階の流れを旋律として表現していた。しかしながら、本発明においては、単に旋律だけで運転者に伝達すべき状況を音楽心理学的に暗示することに限定されるわけではない。例えば、音階の流れの速さ、つまり音楽におけるテンポを運転者に伝達すべき状況に応じて変化させることや、各リバース音を表している各音符の時間長さによって作り出される音楽リズムを運転者に伝達すべき状況に応じて変化させることもその権利範囲に含まれている。つまり、出力リバース音決定部によって決定された音階の流れという技術概念には、特定音階における旋律だけでなく、テンポやリズムも含まれている。
【符号の説明】
【0043】
8 バックカメラ
10 モニタ
11 スピーカ
40 駐車支援ユニット
50 リバース音処理ユニット(運転支援装置)
51 情報取得部
52 リバース音管理部
53 出力リバース音決定部
54 リバース音出力制御部
【特許請求の範囲】
【請求項1】
車両後退時にリバース音を出力して運転を支援する運転支援装置であって、
車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部と、
前記リバース音を主音とみなした音階に属する音に対応するリバース音を音階リバース音として管理するリバース音管理部と、
前記運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部と、
前記リバース音管理部によって管理されているリバース音から前記出力リバース音決定部によって決定された前記音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部と、
を備えた運転支援装置。
【請求項2】
前記リバース音出力制御部は、前記音階の流れを作り出すリバース音群を同一周期で間欠的に出力する請求項1に記載の運転支援装置。
【請求項3】
前記出力リバース音決定部は、前記運転支援情報に応じて車両状態及び車両周辺状態の悪化傾向と良化傾向とを判定し、悪化傾向の判定時には主音から下属音、あるいは主音から属音となる音階の流れを決定し、良化傾向の判定時には下属音から主音、あるいは属音から主音となる音階の流れを決定する請求項1または2に記載の運転支援装置。
【請求項4】
前記リバース音管理部は、車両に固有の通常リバース音を特定音階の主音としての役割をもつ主リバース音とし、この主リバース音の音データに基づいて前記属音に対応する属リバース音と前記下属音に対応する下属リバース音とを生成する請求項3に記載の運転支援装置。
【請求項5】
前記車両状態及び車両周辺状態は、操舵角データ、自動運転支援開始位置データ、車両速度データ、障害物検出データによって直接求められる状態もしくはこれらのデータの組み合わせによって間接的に求められる状態である請求項1から4のいずれか一項に記載の運転支援装置。
【請求項1】
車両後退時にリバース音を出力して運転を支援する運転支援装置であって、
車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部と、
前記リバース音を主音とみなした音階に属する音に対応するリバース音を音階リバース音として管理するリバース音管理部と、
前記運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部と、
前記リバース音管理部によって管理されているリバース音から前記出力リバース音決定部によって決定された前記音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部と、
を備えた運転支援装置。
【請求項2】
前記リバース音出力制御部は、前記音階の流れを作り出すリバース音群を同一周期で間欠的に出力する請求項1に記載の運転支援装置。
【請求項3】
前記出力リバース音決定部は、前記運転支援情報に応じて車両状態及び車両周辺状態の悪化傾向と良化傾向とを判定し、悪化傾向の判定時には主音から下属音、あるいは主音から属音となる音階の流れを決定し、良化傾向の判定時には下属音から主音、あるいは属音から主音となる音階の流れを決定する請求項1または2に記載の運転支援装置。
【請求項4】
前記リバース音管理部は、車両に固有の通常リバース音を特定音階の主音としての役割をもつ主リバース音とし、この主リバース音の音データに基づいて前記属音に対応する属リバース音と前記下属音に対応する下属リバース音とを生成する請求項3に記載の運転支援装置。
【請求項5】
前記車両状態及び車両周辺状態は、操舵角データ、自動運転支援開始位置データ、車両速度データ、障害物検出データによって直接求められる状態もしくはこれらのデータの組み合わせによって間接的に求められる状態である請求項1から4のいずれか一項に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−51468(P2011−51468A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−201916(P2009−201916)
【出願日】平成21年9月1日(2009.9.1)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年9月1日(2009.9.1)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]