
運転支援装置
【課題】より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出する。このため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
【解決手段】ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出する。このため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援装置に関し、特に、自車が経路上を走行するための規範となる運転支援を行う運転支援装置に関するものである。
【背景技術】
【0002】
従来、自車が経路上を走行するための規範となる情報を提供する装置が提案されている。例えば、特許文献1には、ドライバーの技量と自信度に応じた態様により運転支援情報をドライバーに提供する装置が開示されている。この運転支援装置では、ドライバーの運転技量を判断する運転技量判断手段と、ドライバーの主観的評価に基づく運転技量に対する自信度を判断する自信度判断手段と、判断された運転技量と自信度に基づいて、情報取得手段を介して取得した運転支援情報を提供する際の態様を決定する提供態様決定手段と、決定された態様により運転支援情報をドライバーに提供する提供手段とを備える。この運転支援装置では、運転技量判断手段は、車両情報に含まれる自車の走行軌跡を取得する走行軌跡取得部と、自車が走行する道路の規範走行モデルを取得する規範走行モデル取得部と、規範走行モデルに対する自車の走行軌跡の乖離度に基づいて運転者の運転技量を算出する運転技量算出部とを有する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−134496号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の装置では、自車が走行する道路の規範走行モデルが取得されるが、当該規範走行モデルは必ずしもドライバーが不快感を覚えない走行モデルではない。例えば、同じ速度で走行したとしても、走行する道路形状によってドライバーが乗り心地が良いと感じる走行方法は異なってくる。そのため、より自車が走行する状況に応じて、自車が経路上を走行するための規範となる情報を提供する装置が望まれている。
【0005】
本発明は、このような実情に考慮してなされたものであり、その目的は、より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出する抽出手段と、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車が経路上を走行するための規範となる規範速度を算出する規範速度算出手段とを備えた運転支援装置である。
【0007】
この構成によれば、抽出手段が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、規範速度算出手段が、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車が経路上を走行するための規範となる規範速度を算出するため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車が走行する状況に応じた規範速度を提供することが可能となる。
【0008】
この場合、パラメータそれぞれの時間変化率には、自車の加速度及び加速度を時間で微分した値であるジャークが含まれることが好適である。
【0009】
加速度及び加速度を時間で微分した値であるジャークは車両の乗り心地に大きな影響を与えるものであるが、この構成によれば、経路の道路形状に対応した加速度及びジャークに基づいて規範速度が算出されることになり、より自車が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0010】
この場合、規範速度算出手段は、加速度とジャークとに基づいて自車が経路上を走行するための規範となる規範加速度を算出し、算出した前記規範加速度に基づいて規範速度を算出することが好適である。
【0011】
この構成によれば、規範速度算出手段は、加速度とジャークとに基づいて自車が経路上を走行するための規範となる規範加速度を算出し、算出した前記規範加速度に基づいて規範速度を算出するため、比較的容易に規範速度を算出することが可能となる。
【0012】
この場合、規範速度算出手段は、自車がジャークにより加減速を行うことにより最短時間で加速度に達する規範加速度を算出し、自車が最短時間で加速度に達する規範加速度により加減速を行った場合の規範速度を算出することが好適である。
【0013】
この構成によれば、規範速度算出手段は、自車がジャークにより加減速を行うことにより最短時間で加速度に達する規範加速度を算出し、自車が最短時間で加速度に達する規範加速度により加減速を行った場合の規範速度を算出するため、規範速度算出手段は、データベースの加速度及びジャークを限界値とした場合において、経路上の移動効率を最大とする規範速度を算出することができる。
【0014】
また、経路の道路形状には、経路の曲率半径が含まれることが好適である。
【0015】
経路の曲率半径は、同じ速度で走行した場合においても、車両の乗り心地に大きな影響を与えるものであるが、この構成によれば、経路の道路形状には、経路の曲率半径が含まれるため、経路の曲率半径に対応したパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0016】
また、抽出手段は、データベースから自車のドライバーの運転の熟練度に応じたパラメータそれぞれの時間変化率を抽出し、規範速度算出手段は、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車のドライバーの運転の熟練度に応じた規範速度を算出することが好適である。
【0017】
同じ経路を同じ速度で走行したとしても、ドライバーの運転の熟練度によってドライバーが感じる乗り心地は異なるが、この構成によれば、抽出手段は、データベースから自車のドライバーの運転の熟練度に応じたパラメータそれぞれの時間変化率を抽出し、規範速度算出手段は、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車のドライバーの運転の熟練度に応じた規範速度を算出するため、熟練度によってドライバーが感じる乗り心地の違いを考慮に入れた規範速度を算出することが可能となる。
【0018】
また、規範速度算出手段は、自車が経路上を実際に走行する際の速度と規範速度との差に基づいて規範速度を補正することが好適である。
【0019】
この構成によれば、規範速度算出手段は、自車が経路上を実際に走行する際の速度と規範速度との差に基づいて規範速度を補正するため、自車が経路上を実際に走行する際の速度に対応してロバストに規範速度を算出することが可能となる。
【0020】
この場合、規範速度算出手段は、自車が経路上を規範速度で走行した場合に経路上の所定の地点に到達する時間に、自車が経路上の地点に実際に到達するように規範速度を補正することが好適である。
【0021】
この構成によれば、規範速度算出手段は、自車が経路上を規範速度で走行した場合に経路上の所定の地点に到達する時間に、自車が経路上の地点に実際に到達するように規範速度を補正するため、自車が実際には規範速度から外れた速度で走行したとしても、経路上での移動効率を規範速度で走行した場合と同様にすることが可能となる。
【発明の効果】
【0022】
本発明の運転支援装置によれば、より自車が走行する状況に応じた規範速度を提供することが可能となる。
【図面の簡単な説明】
【0023】
【図1】実施形態に係る運転支援装置の構成を示すブロック図である。
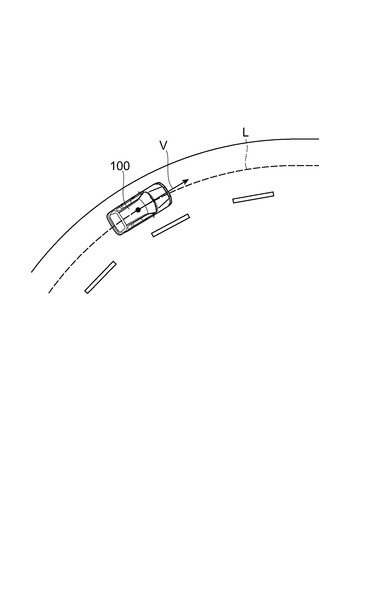
【図2】交差点において自車が取り得るパスの候補を示す平面図である。
【図3】実施形態に係る運転支援装置の動作の概略を示すフローチャートである。
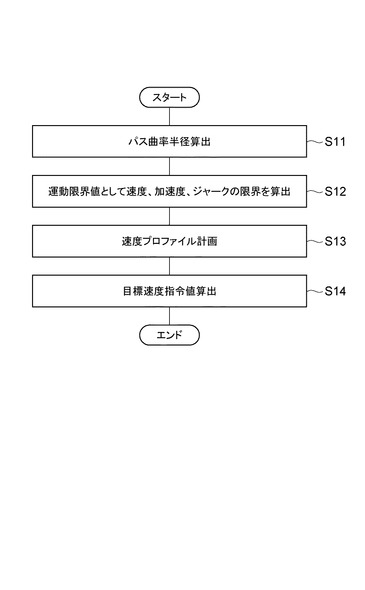
【図4】図3の規範車速計画の詳細な動作を示すフローチャートである。
【図5】自車の走行軌跡と速度との関係を示す平面図である。
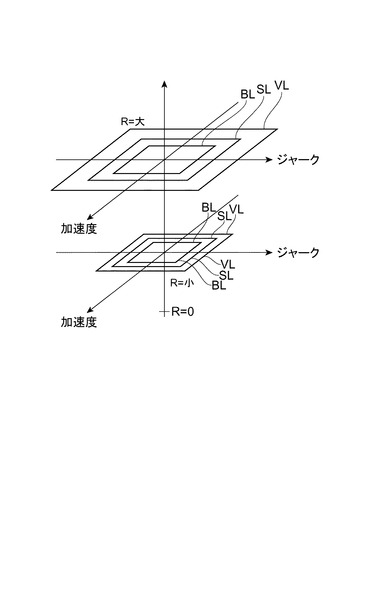
【図6】カーブの曲率半径に対する加速度とジャークとを規定したベクトル空間を示す斜視図である。
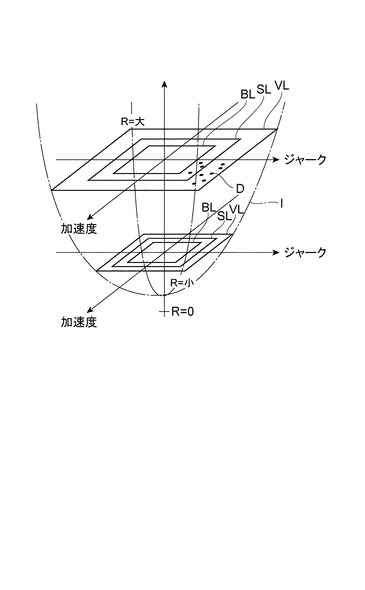
【図7】図6のベクトル空間に補間を行ったベクトル空間を示す斜視図である。
【図8】図4の速度プロファイル計画の詳細な動作を示すフローチャートである。
【図9】作成される速度プロファイルにおけるジャーク、加速度、速度及び位置を示す図である。
【図10】図3の規範車速補正の詳細な動作を示すフローチャートである。
【図11】規範速度、現実の自車の車速、補正値及び位置との関係を示すグラフである。
【発明を実施するための形態】
【0024】
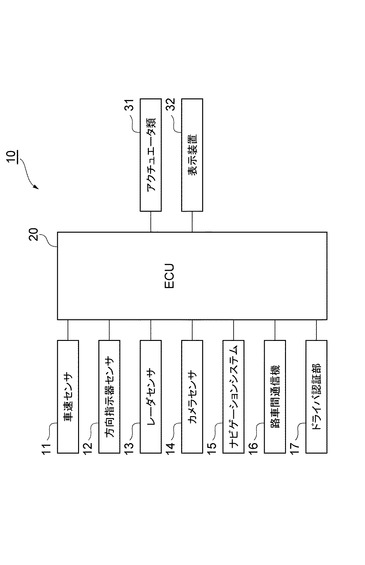
以下、図面を参照して本発明の実施形態に係る運転支援装置を説明する。本実施形態の運転支援装置は車両に搭載され、自車のドライバーに、経路を乗り心地良く走行するための規範となる規範速度を提供するための装置である。図1に示すように、本実施形態の運転支援装置10は、車速センサ11、方向指示器センサ12、レーダセンサ13、カメラセンサ14、ナビゲーションシステム15、路車間通信機16、ドライバ認証部17、ECU20、アクチュエータ類31及び表示装置32を備えている。
【0025】
車速センサ11は、自車の車軸の回転速度から自車の速度を検出するためのセンサである。車速センサ11が検出した速度からは、速度を時間で微分した加速度及び加速度を時間で微分したジャークが得られる。
【0026】
方向指示器センサ12は、自車の方向指示器(ウインカ)の指示する方向を検出するためのものである。方向指示器センサ12は、自車の経路を推定するために用いられる。
【0027】
レーダセンサ13は、例えば自車前方にミリ波を照射することにより、自車前方の道路の曲率半径を測定するためのものである。カメラセンサ14は、自車前方の道路を撮像し、パターン認識等により、自車前方の道路の曲率半径を測定するためのものである。
【0028】
ナビゲーションシステム14は、GPS(Global Positioning System)による自車の測位とデータベース内の地図情報とに基づいて自車が走行する道路の曲率半径を取得するためのものである。また、ナビゲーションシステム14は、ドライバーが入力した目的地や経路についての情報から、自車の経路を推定するためにも用いられる。
【0029】
路車間通信機16は、光ビーコン送信機等の路側の施設から自車前方の道路の曲率半径に関する情報を取得するためのものである。
【0030】
ドライバ認証部17は、自車を運転するドライバーを認証し、ドライバーの運転の熟練度に関する情報を取得するためのものである。ドライバ認証部17は、ドライバーによる暗証番号等の入力や、IDカード等の挿入や、ドライバーの指紋、網膜、虹彩等を識別することによる生体認証等により、ドライバーを認証する。ドライバーの運転の熟練度に関する情報は、ドライバーの総走行距離、走行時間、運転年数等により取得することができる。
【0031】
ECU(Electronic Control Unit)20は、車速センサ11等から得られた情報に基づいて、自車前方の道路の曲率半径及びドライバーの運転の熟練度に応じた規範速度を算出する。
【0032】
アクチュエータ類31は、ECU20が算出した規範速度に基づいて、ドライバーの運転操作に介入して、自車のブレーキやアクセルを駆動させるブレーキアクチュエータやアクセルアクチュエータである。また、アクチュエータ類31は、例えば、ドライバーのアクセル操作に対して反力を与えるものでも良い。
【0033】
表示装置32は、ドライバーに画像を表示するディスプレイや、ドライバーに音声案内を行うスピーカや、ドライバーに警報を与えるブザーである。表示装置32は、ドライバーにECU20が算出した規範速度に基づいた情報を提示するためのものである。
【0034】
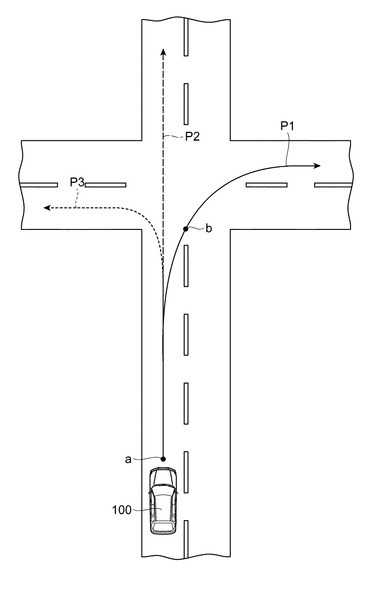
以下、本実施形態の運転支援装置10の動作について説明する。前提として、運転支援装置10のECU20は、自車が走行する経路(パス)を選択する。たとえば、図2に示すような自車100が交差点に進入しようとしている状況では、自車の予測される経路は、交差点を右折する経路P1、交差点を直進する経路P2及び交差点を左折する経路P3の3つがある。ECU20は、方向指示器センサ12からの方向指示器の指示方向や、ナビゲーションシステム15にドライバーが設定した目的地や経路についての情報から、自車100の経路を選択する。以下の説明では、自車100は、交差点を右折する経路P1を地点aから地点bへと移動するものとする。
【0035】
本実施形態の運転支援装置10は、大きく分けると、図3に示すような規範速度の計画を行う工程(S1)と、計画した規範速度の補正を行う工程(S2)とを実行する。以下、まず規範速度の計画を行う工程について説明する。図4に示すように、ECU20は、自車100が走行する経路の曲率半径を算出する(S11)。経路の曲率半径は、レーダセンサ13やカメラセンサ14による測定値や、ナビゲーションシステム15の地図情報や路車間通信機16から得られた情報に基づいて得ることができる。曲率半径は、経路の単位長さ毎に曲率半径の情報が得られるものとする。この場合、曲率半径の情報は、大、中、小等の離散的な有限個の情報であっても良い。なお、この曲率半径の情報は、自車100の経路が予め確定しており、経路の形状が既知である場合は、路車間通信機16等を利用せずに、予め計算し、データとして保持していても良い。
【0036】
ECU20は、運動限界値として速度、加速度、ジャークの限界を算出する(S12)。なお、この場合の速度とは、図5に示すように、自車100の走行軌跡Lの接線方向の速度Vを意味する。この速度Vを時間で微分したものが加速度となる。この加速度を時間で微分したものがジャークとなる。
【0037】
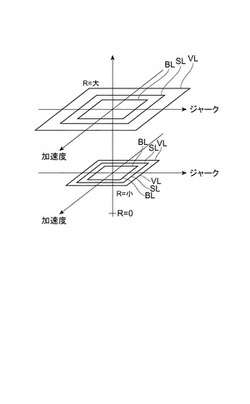
ECU20は、図6に示すように、経路の曲率半径R、加速度及びジャークを座標軸とする3次元空間上に、経路の曲率半径Rに対応した加速度及びジャークの限界を設定したデータを予め保持している。図6に示すように、加速度及びジャークそれぞれの限界は、最も小さい値に設定されている初心者許容限界BL、中程度の値に設定されている標準許容限界SL及び最も大きい値に設定されているベテラン許容限界VLの3つが設定されている。初心者許容限界BL、標準許容限界SL及びベテラン許容限界VLのいずれも、曲率半径Rが小さく、小さな加速度やジャークでもドライバーが不快感を覚え易い場合ほど、小さい値に設定されている。
【0038】
図6に示すようなデータは、予めドライバーの熟練度に応じて実測値を測定することで作成することができる。図7に示すように、曲率半径R、加速度及びジャークについての離散的なデータDを取得しておき、それらを補間するように曲線Iを描くことにより、さまざまな曲率半径Rに対応した加速度及びジャークの限界を求めることが可能となる。ECU20は、図4のS11で算出した経路の曲率半径Rと自車100のドライバーの運転の熟練度に対応する加速度及びジャークの限界を図7に示すデータから抽出し、自車100が走行する経路の加速度及びジャークの限界とする。
【0039】
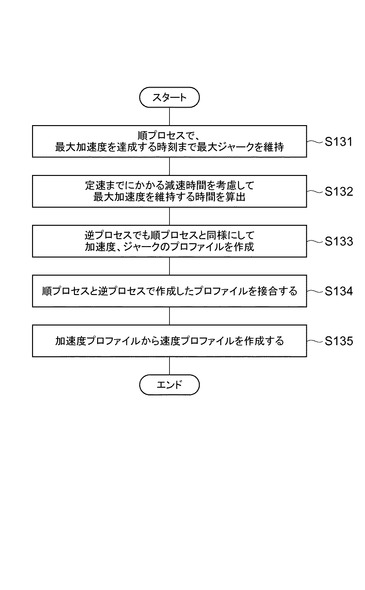
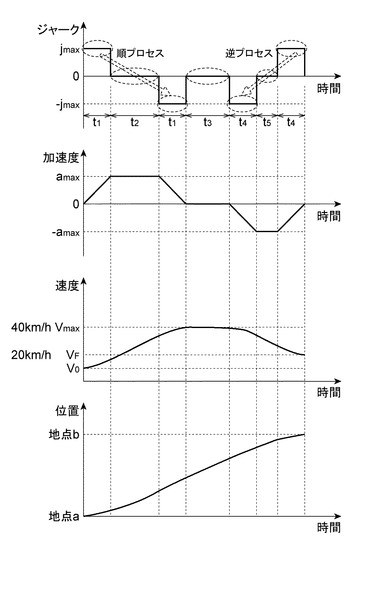
ECU20は、抽出された加速度及びジャークの限界を用いて規範速度を時間の関数として表した速度プロファイルを計画する。ジャークの限界が最大ジャークjmaxであり、加速度の限界が最大加速度amaxとした場合に、最大加速度amaxとなる時刻まで最大ジャークjmaxを維持して加速を行った場合が最も最大加速度amaxとなるまでの時間が短く移動効率が良い。そこで、ECU20は、図8及び9に示すように、自車が速度を増大させる加速時についての順プロセスにおいて、最大加速度amaxを達成する時刻まで最大ジャークjmaxを維持するジャークプロファイル及び加速度プロファイルを作成する(S131)。
【0040】
ECU20は、定速となる最大速度Vmaxとするまでに要する減速時間を考慮して、最大加速度amaxを維持する時間を算出する(S132)。これにより、順プロセスにおける加速度プロファイルが作成される。
【0041】
ECU20は、自車が速度を減少させる減速時についての逆プロセスにおいても、順プロセスと同様にして、加速度及びジャークの経時的な変化を示す加速度プロファイル及びジャークプロファイルを作成する(S133)。ECU20は、順プロセスと逆プロセルとで作成したジャークプロファイル及び加速度プロファイルを接合する(S134)。
【0042】
ECU20は、加速度プロファイルを積分し、速度Vの初期値をV0、最終値をVFとすることにより、速度プロファイルを作成する(S135)。ECU20は、当該速度プロファイルに係る速度を規範速度(速度指令値)として、アクチュエータ類31を駆動し、表示装置32に規範速度を表示する。なお、速度プロファイルを積分することにより、地点aから地点bまでの位置プロファイルが作成される。
【0043】
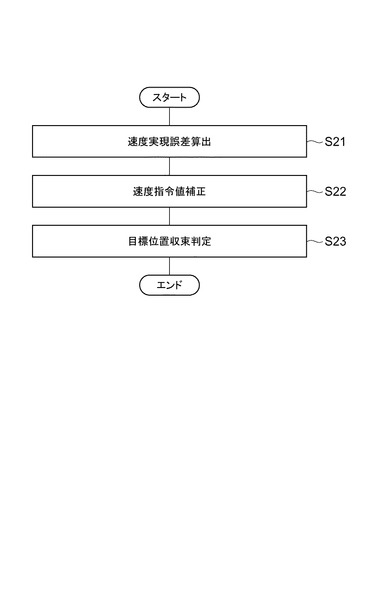
次に計画した規範速度の補正を行う工程について説明する。図10及び図11に示すように、ECU20は、車速センサ11により検出された実際の自車100の速度と規範速度との差である速度実現誤差を算出する(S21)。ECU20は、速度実現誤差に応じて速度指令値の補正を行う(S22)。
【0044】
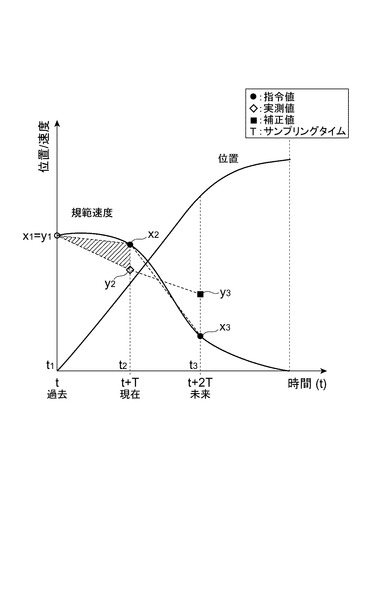
以下、速度実現誤差の算出と速度指令値の補正について詳述する。図11に示すような規範車速の車速プロファイルが、図11に示すように過去の時刻t1で計画されていたとする。時刻t1からサンプリングタイムT後の時刻t2において、速度指令値x2に対して、実際の自車100の速度はy2であったとする。この場合、ECU20は図11中の四角形t1x1x2t2の面積すなわち規範速度による移動距離と、四角形t1y1y2t2の面積すなわち現実の速度による移動距離との移動距離差ΔSを算出する。
【0045】
ECU20は、時刻t2からサンプリングタイムT後の時刻t3において、移動距離差ΔS+四角形t2x2x3t3の面積(移動距離)と、四角形t2y2y3t3の面積(移動距離)とが一致するように、規範速度x3をy3に補正する。すなわち、ECU20は、前半の時刻t1〜t2での遅れを取り戻すため、後半の時刻t2〜t3で目標とする規範速度を上方修正する。
【0046】
ECU20は、規範速度による移動距離の総和と、実際の速度による距離の総和との距離の差が所定値以下であるかどうかを判定し、当該距離の差が所定値を超えた場合は、所定の補正量をS21及びS22における補正値に加算する。
【0047】
本実施形態によれば、ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出するため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
【0048】
特に、加速度及び加速度を時間で微分した値であるジャークは車両の乗り心地に大きな影響を与えるものであるが、本実施形態によれば、経路の道路形状に対応した加速度及びジャークに基づいて規範速度が算出されることになり、より自車100が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0049】
さらに、ECU20は、加速度とジャークとに基づいて自車100が経路上を走行するための規範となる規範加速度を算出し、算出した規範加速度に基づいて規範速度を算出するため、比較的容易に規範速度を算出することが可能となる。
【0050】
加えて、ECU20は、自車100がジャークにより加減速を行うことにより最短時間で加速度に達する規範加速度を算出し、自車が最短時間で加速度に達する規範加速度により加減速を行った場合の規範速度を算出するため、データベースの加速度及びジャークを限界値とした場合において、経路上の移動効率を最大とする規範速度を算出することができる。
【0051】
また、経路の曲率半径は、同じ速度で走行した場合においても、車両の乗り心地に大きな影響を与えるものであるが、本実施形態によれば、経路の道路形状には、経路の曲率半径Rが含まれるため、経路の曲率半径Rに対応したパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0052】
また、同じ経路を同じ速度で走行したとしても、ドライバーの運転の熟練度によってドライバーが感じる乗り心地は異なるが、本実施形態によれば、ECU20は、データベースから自車100のドライバーの運転の熟練度に応じたパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100のドライバーの運転の熟練度に応じた規範速度を算出するため、熟練度によってドライバーが感じる乗り心地の違いを考慮に入れた規範速度を算出することが可能となる。
【0053】
また、ECU20は、自車100が経路上を実際に走行する際の速度と規範速度との差に基づいて規範速度を補正するため、自車100が経路上を実際に走行する際の速度に対応してロバストに規範速度を算出することが可能となる。
【0054】
さらに、ECU20は、自車100が経路上を規範速度で走行した場合に経路上の所定の地点に到達する時間に、自車100が経路上の地点に実際に到達するように規範速度を補正するため、自車100が実際には規範速度から外れた速度で走行したとしても、経路上での移動効率を規範速度で走行した場合と同様にすることが可能となる。
【0055】
尚、本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0056】
10…運転支援装置、11…車速センサ、12…方向指示器センサ、13…レーダセンサ、14…カメラセンサ、15…ナビゲーションシステム、16…路車間通信機、17…ドライバ認証部、20…ECU、31…アクチュエータ類、32…表示装置、100…自車、200…他車。
【技術分野】
【0001】
本発明は、運転支援装置に関し、特に、自車が経路上を走行するための規範となる運転支援を行う運転支援装置に関するものである。
【背景技術】
【0002】
従来、自車が経路上を走行するための規範となる情報を提供する装置が提案されている。例えば、特許文献1には、ドライバーの技量と自信度に応じた態様により運転支援情報をドライバーに提供する装置が開示されている。この運転支援装置では、ドライバーの運転技量を判断する運転技量判断手段と、ドライバーの主観的評価に基づく運転技量に対する自信度を判断する自信度判断手段と、判断された運転技量と自信度に基づいて、情報取得手段を介して取得した運転支援情報を提供する際の態様を決定する提供態様決定手段と、決定された態様により運転支援情報をドライバーに提供する提供手段とを備える。この運転支援装置では、運転技量判断手段は、車両情報に含まれる自車の走行軌跡を取得する走行軌跡取得部と、自車が走行する道路の規範走行モデルを取得する規範走行モデル取得部と、規範走行モデルに対する自車の走行軌跡の乖離度に基づいて運転者の運転技量を算出する運転技量算出部とを有する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−134496号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の装置では、自車が走行する道路の規範走行モデルが取得されるが、当該規範走行モデルは必ずしもドライバーが不快感を覚えない走行モデルではない。例えば、同じ速度で走行したとしても、走行する道路形状によってドライバーが乗り心地が良いと感じる走行方法は異なってくる。そのため、より自車が走行する状況に応じて、自車が経路上を走行するための規範となる情報を提供する装置が望まれている。
【0005】
本発明は、このような実情に考慮してなされたものであり、その目的は、より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出する抽出手段と、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車が経路上を走行するための規範となる規範速度を算出する規範速度算出手段とを備えた運転支援装置である。
【0007】
この構成によれば、抽出手段が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、規範速度算出手段が、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車が経路上を走行するための規範となる規範速度を算出するため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車が走行する状況に応じた規範速度を提供することが可能となる。
【0008】
この場合、パラメータそれぞれの時間変化率には、自車の加速度及び加速度を時間で微分した値であるジャークが含まれることが好適である。
【0009】
加速度及び加速度を時間で微分した値であるジャークは車両の乗り心地に大きな影響を与えるものであるが、この構成によれば、経路の道路形状に対応した加速度及びジャークに基づいて規範速度が算出されることになり、より自車が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0010】
この場合、規範速度算出手段は、加速度とジャークとに基づいて自車が経路上を走行するための規範となる規範加速度を算出し、算出した前記規範加速度に基づいて規範速度を算出することが好適である。
【0011】
この構成によれば、規範速度算出手段は、加速度とジャークとに基づいて自車が経路上を走行するための規範となる規範加速度を算出し、算出した前記規範加速度に基づいて規範速度を算出するため、比較的容易に規範速度を算出することが可能となる。
【0012】
この場合、規範速度算出手段は、自車がジャークにより加減速を行うことにより最短時間で加速度に達する規範加速度を算出し、自車が最短時間で加速度に達する規範加速度により加減速を行った場合の規範速度を算出することが好適である。
【0013】
この構成によれば、規範速度算出手段は、自車がジャークにより加減速を行うことにより最短時間で加速度に達する規範加速度を算出し、自車が最短時間で加速度に達する規範加速度により加減速を行った場合の規範速度を算出するため、規範速度算出手段は、データベースの加速度及びジャークを限界値とした場合において、経路上の移動効率を最大とする規範速度を算出することができる。
【0014】
また、経路の道路形状には、経路の曲率半径が含まれることが好適である。
【0015】
経路の曲率半径は、同じ速度で走行した場合においても、車両の乗り心地に大きな影響を与えるものであるが、この構成によれば、経路の道路形状には、経路の曲率半径が含まれるため、経路の曲率半径に対応したパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0016】
また、抽出手段は、データベースから自車のドライバーの運転の熟練度に応じたパラメータそれぞれの時間変化率を抽出し、規範速度算出手段は、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車のドライバーの運転の熟練度に応じた規範速度を算出することが好適である。
【0017】
同じ経路を同じ速度で走行したとしても、ドライバーの運転の熟練度によってドライバーが感じる乗り心地は異なるが、この構成によれば、抽出手段は、データベースから自車のドライバーの運転の熟練度に応じたパラメータそれぞれの時間変化率を抽出し、規範速度算出手段は、抽出手段が抽出したパラメータそれぞれの時間変化率に基づいて、自車のドライバーの運転の熟練度に応じた規範速度を算出するため、熟練度によってドライバーが感じる乗り心地の違いを考慮に入れた規範速度を算出することが可能となる。
【0018】
また、規範速度算出手段は、自車が経路上を実際に走行する際の速度と規範速度との差に基づいて規範速度を補正することが好適である。
【0019】
この構成によれば、規範速度算出手段は、自車が経路上を実際に走行する際の速度と規範速度との差に基づいて規範速度を補正するため、自車が経路上を実際に走行する際の速度に対応してロバストに規範速度を算出することが可能となる。
【0020】
この場合、規範速度算出手段は、自車が経路上を規範速度で走行した場合に経路上の所定の地点に到達する時間に、自車が経路上の地点に実際に到達するように規範速度を補正することが好適である。
【0021】
この構成によれば、規範速度算出手段は、自車が経路上を規範速度で走行した場合に経路上の所定の地点に到達する時間に、自車が経路上の地点に実際に到達するように規範速度を補正するため、自車が実際には規範速度から外れた速度で走行したとしても、経路上での移動効率を規範速度で走行した場合と同様にすることが可能となる。
【発明の効果】
【0022】
本発明の運転支援装置によれば、より自車が走行する状況に応じた規範速度を提供することが可能となる。
【図面の簡単な説明】
【0023】
【図1】実施形態に係る運転支援装置の構成を示すブロック図である。
【図2】交差点において自車が取り得るパスの候補を示す平面図である。
【図3】実施形態に係る運転支援装置の動作の概略を示すフローチャートである。
【図4】図3の規範車速計画の詳細な動作を示すフローチャートである。
【図5】自車の走行軌跡と速度との関係を示す平面図である。
【図6】カーブの曲率半径に対する加速度とジャークとを規定したベクトル空間を示す斜視図である。
【図7】図6のベクトル空間に補間を行ったベクトル空間を示す斜視図である。
【図8】図4の速度プロファイル計画の詳細な動作を示すフローチャートである。
【図9】作成される速度プロファイルにおけるジャーク、加速度、速度及び位置を示す図である。
【図10】図3の規範車速補正の詳細な動作を示すフローチャートである。
【図11】規範速度、現実の自車の車速、補正値及び位置との関係を示すグラフである。
【発明を実施するための形態】
【0024】
以下、図面を参照して本発明の実施形態に係る運転支援装置を説明する。本実施形態の運転支援装置は車両に搭載され、自車のドライバーに、経路を乗り心地良く走行するための規範となる規範速度を提供するための装置である。図1に示すように、本実施形態の運転支援装置10は、車速センサ11、方向指示器センサ12、レーダセンサ13、カメラセンサ14、ナビゲーションシステム15、路車間通信機16、ドライバ認証部17、ECU20、アクチュエータ類31及び表示装置32を備えている。
【0025】
車速センサ11は、自車の車軸の回転速度から自車の速度を検出するためのセンサである。車速センサ11が検出した速度からは、速度を時間で微分した加速度及び加速度を時間で微分したジャークが得られる。
【0026】
方向指示器センサ12は、自車の方向指示器(ウインカ)の指示する方向を検出するためのものである。方向指示器センサ12は、自車の経路を推定するために用いられる。
【0027】
レーダセンサ13は、例えば自車前方にミリ波を照射することにより、自車前方の道路の曲率半径を測定するためのものである。カメラセンサ14は、自車前方の道路を撮像し、パターン認識等により、自車前方の道路の曲率半径を測定するためのものである。
【0028】
ナビゲーションシステム14は、GPS(Global Positioning System)による自車の測位とデータベース内の地図情報とに基づいて自車が走行する道路の曲率半径を取得するためのものである。また、ナビゲーションシステム14は、ドライバーが入力した目的地や経路についての情報から、自車の経路を推定するためにも用いられる。
【0029】
路車間通信機16は、光ビーコン送信機等の路側の施設から自車前方の道路の曲率半径に関する情報を取得するためのものである。
【0030】
ドライバ認証部17は、自車を運転するドライバーを認証し、ドライバーの運転の熟練度に関する情報を取得するためのものである。ドライバ認証部17は、ドライバーによる暗証番号等の入力や、IDカード等の挿入や、ドライバーの指紋、網膜、虹彩等を識別することによる生体認証等により、ドライバーを認証する。ドライバーの運転の熟練度に関する情報は、ドライバーの総走行距離、走行時間、運転年数等により取得することができる。
【0031】
ECU(Electronic Control Unit)20は、車速センサ11等から得られた情報に基づいて、自車前方の道路の曲率半径及びドライバーの運転の熟練度に応じた規範速度を算出する。
【0032】
アクチュエータ類31は、ECU20が算出した規範速度に基づいて、ドライバーの運転操作に介入して、自車のブレーキやアクセルを駆動させるブレーキアクチュエータやアクセルアクチュエータである。また、アクチュエータ類31は、例えば、ドライバーのアクセル操作に対して反力を与えるものでも良い。
【0033】
表示装置32は、ドライバーに画像を表示するディスプレイや、ドライバーに音声案内を行うスピーカや、ドライバーに警報を与えるブザーである。表示装置32は、ドライバーにECU20が算出した規範速度に基づいた情報を提示するためのものである。
【0034】
以下、本実施形態の運転支援装置10の動作について説明する。前提として、運転支援装置10のECU20は、自車が走行する経路(パス)を選択する。たとえば、図2に示すような自車100が交差点に進入しようとしている状況では、自車の予測される経路は、交差点を右折する経路P1、交差点を直進する経路P2及び交差点を左折する経路P3の3つがある。ECU20は、方向指示器センサ12からの方向指示器の指示方向や、ナビゲーションシステム15にドライバーが設定した目的地や経路についての情報から、自車100の経路を選択する。以下の説明では、自車100は、交差点を右折する経路P1を地点aから地点bへと移動するものとする。
【0035】
本実施形態の運転支援装置10は、大きく分けると、図3に示すような規範速度の計画を行う工程(S1)と、計画した規範速度の補正を行う工程(S2)とを実行する。以下、まず規範速度の計画を行う工程について説明する。図4に示すように、ECU20は、自車100が走行する経路の曲率半径を算出する(S11)。経路の曲率半径は、レーダセンサ13やカメラセンサ14による測定値や、ナビゲーションシステム15の地図情報や路車間通信機16から得られた情報に基づいて得ることができる。曲率半径は、経路の単位長さ毎に曲率半径の情報が得られるものとする。この場合、曲率半径の情報は、大、中、小等の離散的な有限個の情報であっても良い。なお、この曲率半径の情報は、自車100の経路が予め確定しており、経路の形状が既知である場合は、路車間通信機16等を利用せずに、予め計算し、データとして保持していても良い。
【0036】
ECU20は、運動限界値として速度、加速度、ジャークの限界を算出する(S12)。なお、この場合の速度とは、図5に示すように、自車100の走行軌跡Lの接線方向の速度Vを意味する。この速度Vを時間で微分したものが加速度となる。この加速度を時間で微分したものがジャークとなる。
【0037】
ECU20は、図6に示すように、経路の曲率半径R、加速度及びジャークを座標軸とする3次元空間上に、経路の曲率半径Rに対応した加速度及びジャークの限界を設定したデータを予め保持している。図6に示すように、加速度及びジャークそれぞれの限界は、最も小さい値に設定されている初心者許容限界BL、中程度の値に設定されている標準許容限界SL及び最も大きい値に設定されているベテラン許容限界VLの3つが設定されている。初心者許容限界BL、標準許容限界SL及びベテラン許容限界VLのいずれも、曲率半径Rが小さく、小さな加速度やジャークでもドライバーが不快感を覚え易い場合ほど、小さい値に設定されている。
【0038】
図6に示すようなデータは、予めドライバーの熟練度に応じて実測値を測定することで作成することができる。図7に示すように、曲率半径R、加速度及びジャークについての離散的なデータDを取得しておき、それらを補間するように曲線Iを描くことにより、さまざまな曲率半径Rに対応した加速度及びジャークの限界を求めることが可能となる。ECU20は、図4のS11で算出した経路の曲率半径Rと自車100のドライバーの運転の熟練度に対応する加速度及びジャークの限界を図7に示すデータから抽出し、自車100が走行する経路の加速度及びジャークの限界とする。
【0039】
ECU20は、抽出された加速度及びジャークの限界を用いて規範速度を時間の関数として表した速度プロファイルを計画する。ジャークの限界が最大ジャークjmaxであり、加速度の限界が最大加速度amaxとした場合に、最大加速度amaxとなる時刻まで最大ジャークjmaxを維持して加速を行った場合が最も最大加速度amaxとなるまでの時間が短く移動効率が良い。そこで、ECU20は、図8及び9に示すように、自車が速度を増大させる加速時についての順プロセスにおいて、最大加速度amaxを達成する時刻まで最大ジャークjmaxを維持するジャークプロファイル及び加速度プロファイルを作成する(S131)。
【0040】
ECU20は、定速となる最大速度Vmaxとするまでに要する減速時間を考慮して、最大加速度amaxを維持する時間を算出する(S132)。これにより、順プロセスにおける加速度プロファイルが作成される。
【0041】
ECU20は、自車が速度を減少させる減速時についての逆プロセスにおいても、順プロセスと同様にして、加速度及びジャークの経時的な変化を示す加速度プロファイル及びジャークプロファイルを作成する(S133)。ECU20は、順プロセスと逆プロセルとで作成したジャークプロファイル及び加速度プロファイルを接合する(S134)。
【0042】
ECU20は、加速度プロファイルを積分し、速度Vの初期値をV0、最終値をVFとすることにより、速度プロファイルを作成する(S135)。ECU20は、当該速度プロファイルに係る速度を規範速度(速度指令値)として、アクチュエータ類31を駆動し、表示装置32に規範速度を表示する。なお、速度プロファイルを積分することにより、地点aから地点bまでの位置プロファイルが作成される。
【0043】
次に計画した規範速度の補正を行う工程について説明する。図10及び図11に示すように、ECU20は、車速センサ11により検出された実際の自車100の速度と規範速度との差である速度実現誤差を算出する(S21)。ECU20は、速度実現誤差に応じて速度指令値の補正を行う(S22)。
【0044】
以下、速度実現誤差の算出と速度指令値の補正について詳述する。図11に示すような規範車速の車速プロファイルが、図11に示すように過去の時刻t1で計画されていたとする。時刻t1からサンプリングタイムT後の時刻t2において、速度指令値x2に対して、実際の自車100の速度はy2であったとする。この場合、ECU20は図11中の四角形t1x1x2t2の面積すなわち規範速度による移動距離と、四角形t1y1y2t2の面積すなわち現実の速度による移動距離との移動距離差ΔSを算出する。
【0045】
ECU20は、時刻t2からサンプリングタイムT後の時刻t3において、移動距離差ΔS+四角形t2x2x3t3の面積(移動距離)と、四角形t2y2y3t3の面積(移動距離)とが一致するように、規範速度x3をy3に補正する。すなわち、ECU20は、前半の時刻t1〜t2での遅れを取り戻すため、後半の時刻t2〜t3で目標とする規範速度を上方修正する。
【0046】
ECU20は、規範速度による移動距離の総和と、実際の速度による距離の総和との距離の差が所定値以下であるかどうかを判定し、当該距離の差が所定値を超えた場合は、所定の補正量をS21及びS22における補正値に加算する。
【0047】
本実施形態によれば、ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出するため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
【0048】
特に、加速度及び加速度を時間で微分した値であるジャークは車両の乗り心地に大きな影響を与えるものであるが、本実施形態によれば、経路の道路形状に対応した加速度及びジャークに基づいて規範速度が算出されることになり、より自車100が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0049】
さらに、ECU20は、加速度とジャークとに基づいて自車100が経路上を走行するための規範となる規範加速度を算出し、算出した規範加速度に基づいて規範速度を算出するため、比較的容易に規範速度を算出することが可能となる。
【0050】
加えて、ECU20は、自車100がジャークにより加減速を行うことにより最短時間で加速度に達する規範加速度を算出し、自車が最短時間で加速度に達する規範加速度により加減速を行った場合の規範速度を算出するため、データベースの加速度及びジャークを限界値とした場合において、経路上の移動効率を最大とする規範速度を算出することができる。
【0051】
また、経路の曲率半径は、同じ速度で走行した場合においても、車両の乗り心地に大きな影響を与えるものであるが、本実施形態によれば、経路の道路形状には、経路の曲率半径Rが含まれるため、経路の曲率半径Rに対応したパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車が走行する状況に応じて、乗り心地を重視した規範速度を算出することが可能となる。
【0052】
また、同じ経路を同じ速度で走行したとしても、ドライバーの運転の熟練度によってドライバーが感じる乗り心地は異なるが、本実施形態によれば、ECU20は、データベースから自車100のドライバーの運転の熟練度に応じたパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100のドライバーの運転の熟練度に応じた規範速度を算出するため、熟練度によってドライバーが感じる乗り心地の違いを考慮に入れた規範速度を算出することが可能となる。
【0053】
また、ECU20は、自車100が経路上を実際に走行する際の速度と規範速度との差に基づいて規範速度を補正するため、自車100が経路上を実際に走行する際の速度に対応してロバストに規範速度を算出することが可能となる。
【0054】
さらに、ECU20は、自車100が経路上を規範速度で走行した場合に経路上の所定の地点に到達する時間に、自車100が経路上の地点に実際に到達するように規範速度を補正するため、自車100が実際には規範速度から外れた速度で走行したとしても、経路上での移動効率を規範速度で走行した場合と同様にすることが可能となる。
【0055】
尚、本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0056】
10…運転支援装置、11…車速センサ、12…方向指示器センサ、13…レーダセンサ、14…カメラセンサ、15…ナビゲーションシステム、16…路車間通信機、17…ドライバ認証部、20…ECU、31…アクチュエータ類、32…表示装置、100…自車、200…他車。
【特許請求の範囲】
【請求項1】
経路の道路形状と前記経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車が走行する前記経路の道路形状に対応する前記パラメータそれぞれの前記時間変化率を抽出する抽出手段と、
前記抽出手段が抽出した前記パラメータそれぞれの前記時間変化率に基づいて、前記自車が前記経路上を走行するための規範となる規範速度を算出する規範速度算出手段と、
を備えた運転支援装置。
【請求項2】
前記パラメータそれぞれの前記時間変化率には、前記自車の加速度及び前記加速度を時間で微分した値であるジャークが含まれる、請求項1に記載の運転支援装置。
【請求項3】
前記規範速度算出手段は、前記加速度と前記ジャークとに基づいて前記自車が前記経路上を走行するための規範となる規範加速度を算出し、算出した前記規範加速度に基づいて前記規範速度を算出する、請求項2に記載の運転支援装置。
【請求項4】
前記規範速度算出手段は、前記自車が前記ジャークにより加減速を行うことにより最短時間で前記加速度に達する前記規範加速度を算出し、前記自車が最短時間で前記加速度に達する前記規範加速度により加減速を行った場合の前記規範速度を算出する、請求項3に記載の運転支援装置。
【請求項5】
前記経路の道路形状には、前記経路の曲率半径が含まれる、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項6】
前記抽出手段は、前記データベースから前記自車のドライバーの運転の熟練度に応じた前記パラメータそれぞれの時間変化率を抽出し、
前記規範速度算出手段は、前記抽出手段が抽出した前記パラメータそれぞれの前記時間変化率に基づいて、前記自車のドライバーの運転の熟練度に応じた前記規範速度を算出する、請求項1〜5のいずれか1項に記載の運転支援装置。
【請求項7】
前記規範速度算出手段は、前記自車が前記経路上を実際に走行する際の速度と前記規範速度との差に基づいて前記規範速度を補正する、請求項1〜6のいずれか1項に記載の運転支援装置。
【請求項8】
前記規範速度算出手段は、前記自車が前記経路上を前記規範速度で走行した場合に前記経路上の所定の地点に到達する時間に、前記自車が前記経路上の前記地点に実際に到達するように前記規範速度を補正する、請求項7に記載の運転支援装置。
【請求項1】
経路の道路形状と前記経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車が走行する前記経路の道路形状に対応する前記パラメータそれぞれの前記時間変化率を抽出する抽出手段と、
前記抽出手段が抽出した前記パラメータそれぞれの前記時間変化率に基づいて、前記自車が前記経路上を走行するための規範となる規範速度を算出する規範速度算出手段と、
を備えた運転支援装置。
【請求項2】
前記パラメータそれぞれの前記時間変化率には、前記自車の加速度及び前記加速度を時間で微分した値であるジャークが含まれる、請求項1に記載の運転支援装置。
【請求項3】
前記規範速度算出手段は、前記加速度と前記ジャークとに基づいて前記自車が前記経路上を走行するための規範となる規範加速度を算出し、算出した前記規範加速度に基づいて前記規範速度を算出する、請求項2に記載の運転支援装置。
【請求項4】
前記規範速度算出手段は、前記自車が前記ジャークにより加減速を行うことにより最短時間で前記加速度に達する前記規範加速度を算出し、前記自車が最短時間で前記加速度に達する前記規範加速度により加減速を行った場合の前記規範速度を算出する、請求項3に記載の運転支援装置。
【請求項5】
前記経路の道路形状には、前記経路の曲率半径が含まれる、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項6】
前記抽出手段は、前記データベースから前記自車のドライバーの運転の熟練度に応じた前記パラメータそれぞれの時間変化率を抽出し、
前記規範速度算出手段は、前記抽出手段が抽出した前記パラメータそれぞれの前記時間変化率に基づいて、前記自車のドライバーの運転の熟練度に応じた前記規範速度を算出する、請求項1〜5のいずれか1項に記載の運転支援装置。
【請求項7】
前記規範速度算出手段は、前記自車が前記経路上を実際に走行する際の速度と前記規範速度との差に基づいて前記規範速度を補正する、請求項1〜6のいずれか1項に記載の運転支援装置。
【請求項8】
前記規範速度算出手段は、前記自車が前記経路上を前記規範速度で走行した場合に前記経路上の所定の地点に到達する時間に、前記自車が前記経路上の前記地点に実際に到達するように前記規範速度を補正する、請求項7に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−96103(P2011−96103A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−250966(P2009−250966)
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]