
運転支援装置
【課題】自車周辺の障害物と自車との接触のリスクを考慮に入れ、自車が現実的な運転行動を行うことができる支援を行う運転支援装置を提供する。
【解決手段】運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【解決手段】運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転支援装置に関し、特に、自車が走行するための規範となる運転支援を行なう運転支援装置に関するものである。
【背景技術】
【0002】
従来、自車が経路上を走行するための規範となる情報を提供する装置が提案されている。例えば、特許文献1には、車両周辺の走行環境と車両自体の状態とを総合的に判断して車両運転者への最適な運転支援を行うための装置が開示されている。この装置では、車両が置かれている走行環境を検出すると共に、車両の状態を検出する。検出された走行環境と車両状態とに基づいて車両の運転状態が推定される。また、走行環境に応じた走行の規範となる車両の運転理想モデルが算出される。そして、推定運転状態の運転理想モデルからの乖離の有無が演算され、乖離が生じている場合にはアクチュエータが駆動されることにより車両の運転支援が行なわれる。この装置では、交通規則やモラルに基づき運転理想モデルが算出される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−202512号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、どのような規範となるモデルであっても、自車周辺の障害物と自車との接触のリスクは存在する可能性がある。したがって、安全向上のために、当該リスクを考慮した運転支援を行なうことが望ましい。
【0005】
本発明は、このような実情に考慮してなされたものであり、その目的は、自車周辺の障害物と自車との接触のリスクを考慮に入れた自車が走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測するリスク予測手段を備えた運転支援装置である。
【0007】
この構成によれば、リスク予測手段は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測するため、自車周辺の障害物と自車との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【0008】
また、本発明は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測するリスク予測手段と、規範行動候補に係る運転行動により自車が走行した場合における移動効率を取得する移動効率取得手段とを備えた運転支援装置である。
【0009】
この構成によれば、リスク予測手段は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測し、移動効率取得手段は、規範行動候補に係る運転行動により自車が走行した場合における移動効率を取得するため、自車周辺の障害物と自車との接触のリスクと、移動効率とを考慮に入れた規範行動候補を提供することが可能となる。
【0010】
この場合、リスク予測手段は、自車周辺の障害物について取得した障害物情報と、障害物情報に対してより巨視的な関連する情報及び障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて障害物を認知し、障害物と自車との接触のリスクを予測することが好適である。
【0011】
この構成によれば、リスク予測手段は、自車周辺の障害物について取得した障害物情報と、障害物情報に対してより巨視的な関連する情報及び障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて障害物を認知し、障害物と自車との接触のリスクを予測する。このため、障害物について取得された障害物情報が限定的なものであったとしても、得られた情報の範囲から、より巨視的又はより微視的な情報を得ることができ、より有益な障害物の認知が可能となる。
【0012】
また、リスク予測手段は、自車及び障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路である通常経路と、一般経路とは異なる経路である変則経路とを予測しつつ、障害物と自車との接触のリスクを予測することが好適である。
【0013】
この構成によれば、リスク予測手段は、自車及び障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路である通常経路と、一般経路とは異なる経路である変則経路とを予測しつつ、障害物と自車との接触のリスクを予測するため、複数の経路を考慮に入れてリスクを予測する精度を向上させることができる。
【0014】
この場合、リスク予測手段は、障害物の予測される経路について、直接に認知可能な障害物の経路である顕在的経路と、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在的経路とを予測しつつ、障害物と自車との接触のリスクを予測することが好適である。
【0015】
この構成によれば、リスク予測手段は、障害物の予測される経路について、直接に認知可能な障害物の経路である顕在的経路と、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在的経路とを予測しつつ、障害物と自車との接触のリスクを予測するため、潜在的な障害物についてのリスクも予測することが可能となり、予測されるリスクの信頼性を向上させることができる。
【0016】
また、リスク予測手段は、自車及び障害物の予測される経路上に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測することが好適である。
【0017】
この構成によれば、リスク予測手段は、自車及び障害物の予測される経路上に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測するため、例えば道路全域にわたって自車及び障害物が存在する確率を計算する手法に比べて、少ない計算量で障害物と自車との接触のリスクを予測することが可能となる。
【0018】
この場合、リスク予測手段は、自車及び障害物の予測される経路上の位置と速さとを座標軸とする空間内に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測することが好適である。
【0019】
この構成によれば、リスク予測手段は、自車及び障害物の予測される経路上の位置と速さとを座標軸とする空間内に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測するため、少ない計算量で障害物と自車との接触のリスクを予測することが可能となる。
【0020】
また、リスク予測手段は、規範行動候補に係る運転行動により自車が走行した場合について、現在から所定時間経過時における障害物と自車との接触のリスクである短期的リスクと、所定時間より長い時間の経過後における障害物と自車との接触のリスクである長期的リスクとをそれぞれ予測することが好適である。
【0021】
この構成によれば、リスク予測手段は、規範行動候補に係る運転行動により自車が走行した場合について、現在から所定時間経過時における障害物と自車との接触のリスクである短期的リスクと、所定時間より長い時間の経過後における障害物と自車との接触のリスクである長期的リスクとをそれぞれ予測するため、規範行動候補について短期的視点と長期的視点とから、障害物と自車との接触のリスクをより多角的に予測することが可能となる。
【0022】
この場合、リスク予測手段は、短期的リスクが所定の閾値よりも大きいときは、規範行動候補に係る運転行動により自車が走行した場合についての長期的リスクの予測を中止することが好適である。
【0023】
この構成によれば、リスク予測手段は、短期的リスクが所定の閾値よりも大きく、当該規範行動候補に係る運転行動のリスクが短期的に極めて高いときは、当該規範行動候補は妥当性が低く、以後の長期的リスクの予測の必要性は低いため、長期的リスクの予測を中止することにより、不必要な計算量を低減することが可能となる。
【発明の効果】
【0024】
本発明の運転支援装置によれば、自車周辺の障害物と自車との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【図面の簡単な説明】
【0025】
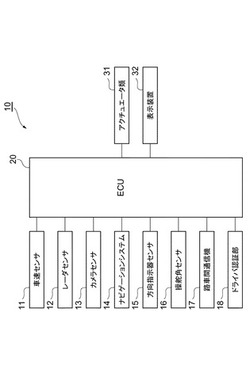
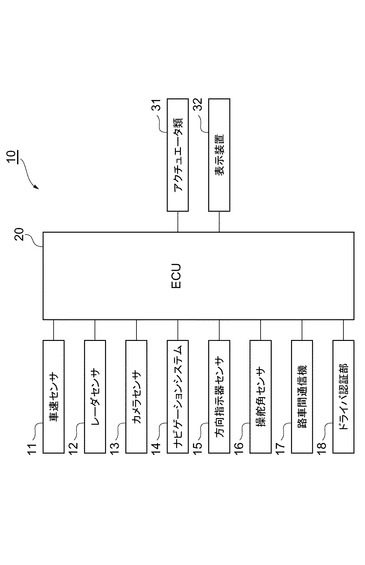
【図1】実施形態に係る運転支援装置の構成を示すブロック図である。
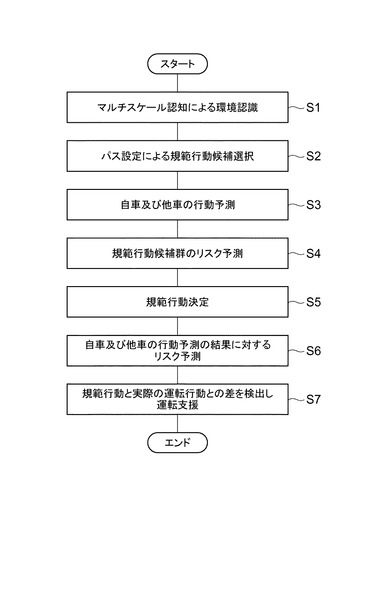
【図2】実施形態に係る運転支援装置の動作の概略を示すフローチャートである。
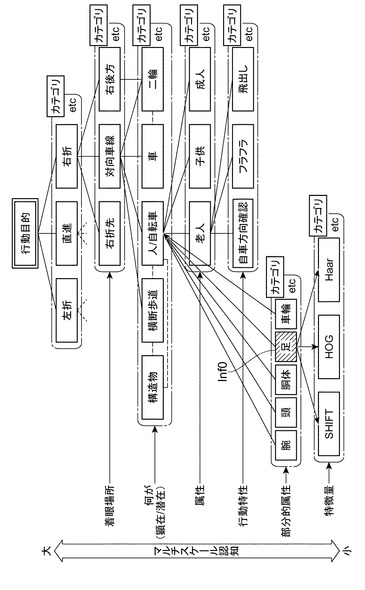
【図3】マルチスケール認知の概念を示す図である。
【図4】パス設定におけるデフォルトパスとアダプティブパスとを示す平面図である。
【図5】パス設定における顕在パスと潜在パスとを示す平面図である。
【図6】自車及び他車の行動予測の動作の詳細を示すフローチャートである。
【図7】行動目的の予測で用いられる説明変数と目的変数との関係を示す表である。
【図8】行動予測における物体の位置と速さとの空間上における存在確率の分布を示す図である。
【図9】リスク予測において想定される状況を示す平面図である。
【図10】自車及び他車の速度プロファイルを示すグラフである。
【図11】想定される交差点の各部の制限速度を示す平面図である。
【図12】交差点通過時の速度プロファイルを示すグラフである。
【図13】自車の先端部分がクロスポイント上に乗ってから自車の後尾部分がクロスポイントを通過する様子を示す平面図である。
【図14】現時刻における他車の存在確率の分布を示すグラフである。
【図15】時刻0と時刻tとにおける他車の存在確率の分布を示すグラフである。
【図16】時刻tにおける他車の存在確率の分布を示すグラフである。
【図17】図16のグラフを速度について積分した他車の位置に対する存在確率の分布を示すグラフである。
【図18】通過時刻にわたる他車の位置に対する存在確率の分布を示すグラフである。
【図19】反射的判断と長期的判断とを組み合わせたリスク予測及び規範行動判断の手順を示す図である。
【図20】規範行動のリスク予測及び規範行動判断で想定される状況を示す平面図である。
【図21】図20の状況の規範行動候補の速度プロファイルを示すグラフである。
【図22】図21に規範行動候補における時間ごとのリスク予測値を示すグラフである。
【図23】図20の状況で自車が停止した場合の状況を示す平面図である。
【図24】図23の状況の規範行動候補の速度プロファイルを示すグラフである。
【図25】図24に規範行動候補における時間ごとのリスク予測値を示すグラフである。
【図26】規範行動候補ごとの速度プロファイルを示すグラフである。
【図27】歩行者及び自転車等に対するリスク予測を行う状況を示す平面図である。
【図28】各クロスポイント到達時刻でのリスク値を判断した時刻ごとに示した表である。
【図29】自車と他車及び自転車とのクロスポイントを示す平面図である。
【図30】規範行動候補1の速度プロファイルを示すグラフである。
【図31】規範行動候補2の速度プロファイルを示すグラフである。
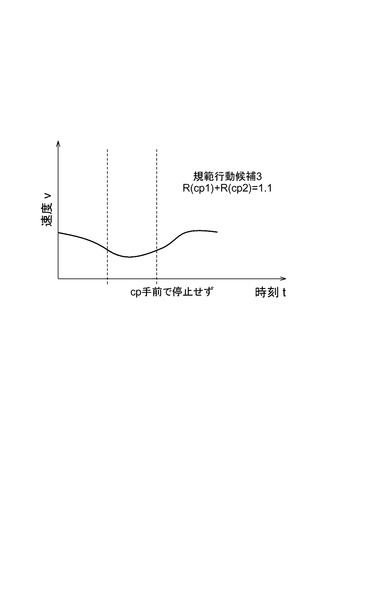
【図32】規範行動候補3の速度プロファイルを示すグラフである。
【発明を実施するための形態】
【0026】
以下、図面を参照して本発明の実施形態に係る運転支援装置を説明する。本実施形態の運転支援装置は車両に搭載され、自車のドライバーに、経路を低いリスクで且つ高い移動効率で走行するための規範となる規範行動を提供するための装置である。図1に示すように、本実施形態の運転支援装置10は、車速センサ11、レーダセンサ12、カメラセンサ13、ナビゲーションシステム14、方向指示器センサ15、操舵角センサ16、路車間通信機17、ドライバ認証部18、ECU20、アクチュエータ類31及び表示装置32を備えている。
【0027】
車速センサ11は、自車の車軸の回転速度から自車の速度を検出するためのセンサである。
【0028】
レーダセンサ12は、例えば自車前方にミリ波を照射することにより、自車前方の他の自動車、自動二輪車、自転車及び歩行者等の障害物を認知するためのものである。また、レーダセンサ12は、道路上に固定された障害物や、道路の線形、曲率半径、勾配等の道路形状を認知するためのものである。
【0029】
カメラセンサ13は、自車前方を撮像し、パターン認識等により、自車前方の他の自動車、自動二輪車、自転車及び歩行者等の障害物を認知するためのものである。また、カメラセンサ13は、パターン認識等により、道路上に固定された障害物や、道路の線形、曲率半径、勾配等の道路形状を認知するためのものである。
【0030】
ナビゲーションシステム14は、GPS(Global Positioning System)による自車の測位とデータベース内の地図情報とに基づいて自車が走行する道路の線形、曲率半径、勾配等の道路形状に関する情報を取得するためのものである。ナビゲーションシステム14は、ドライバーが入力した目的地や経路についての情報から、自車の経路を推定するためにも用いられる。
【0031】
方向指示器センサ15は、自車の方向指示器(ウインカ)の指示する方向を検出するためのものである。方向指示器センサ15は、自車の経路を推定するために用いられる。操舵角センサ16は、自車の操舵角を検出するためのセンサである。操舵角センサ16は、自車の経路を推定するために用いられる。
【0032】
路車間通信機17は、光ビーコン送信機等の路側の施設から自車前方の道路の線形、曲率半径、勾配等の道路形状に関する情報を取得するためのものである。また、路車間通信機17は、路側のセンサで検出した他車、歩行者等の障害物に関する情報を受信するためのものである。さらに、路車間通信機17は、自車が走行する道路の交通量、渋滞、事故、交通規制等の道路の状態に関する情報を取得するためにも用いられる。
【0033】
ドライバ認証部18は、自車を運転するドライバーを認証するためのものである。ドライバ認証部18は、ドライバーによる暗証番号等の入力や、IDカード等の挿入や、ドライバーの指紋、網膜、虹彩等を識別することによる生体認証等により、ドライバーを認証する。
【0034】
ECU(Electronic Control Unit)20は、車速センサ11等から得られた情報に基づいて、自車周辺の状況に対する自車の規範的な運転行動の候補である幾つかの規範行動候補について、自車周辺の障害物と自車とが接触するリスクと、当該規範行動候補に係る運転行動により自車が走行した場合の移動効率とを予測する。
【0035】
アクチュエータ類31は、ECU20が算出した規範行動候補あるいは規範行動候補から選択された規範行動に基づいて、ドライバーの運転操作に介入して、自車のブレーキやアクセルを駆動させるブレーキアクチュエータやアクセルアクチュエータである。また、アクチュエータ類31は、例えば、ドライバーのアクセル操作に対して反力を与えるものでも良い。
【0036】
表示装置32は、ドライバーに画像を表示するディスプレイや、ドライバーに音声案内を行うスピーカや、ドライバーに警報を与えるブザーである。表示装置32は、ドライバーにECU20が算出した規範行動候補に基づいた情報を提示するためのものである。
【0037】
以下、本実施形態の運転支援装置10の動作について説明する。まず、運転支援装置10の動作の概略について説明する。図2に示すように、本実施形態の運転支援装置10は、自車周辺の他車等の障害物について、マルチスケール認知による環境認識を行う(S1)。マルチスケール認知は、事故パターンの分析において、事故を回避するための着眼点のカテゴリーを、微視的に細部まで着眼するカテゴリーから、巨視的に全体を把握するカテゴリーまで階層的に多層化することで、自車の置かれた状況に適したカテゴリーの中からリスク予測の対象となり得る障害物を認知し選択する。
【0038】
運転支援装置10は、パス設定による規範行動候補を選択する(S2)。自車のパス(経路)及び他車のパスの設定は、それぞれのパスを予め複数想定し、パスに当該他車等の可動物を重み付けで割り振り、0.5秒等の短い周期の観測結果ごとにマルチスケール認知を活用して、割り振りの重み付けを更新する。この段階では、パスを1つに絞り込む必要はない。また、パスの設定は、直接に認知可能な障害物の経路である顕在パスと、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在パスとの2種類を設定する。
【0039】
運転支援装置10は、自車及び他車等の障害物の行動を予測する(S3)。この行動予測では、パス上の位置x、速度vを座標とした(x,v)空間上に自車及び他車等が存在する確率分布をセンサ等から得られた情報から推定し、この確率分布を時間ごとに変化させることで、自車及び他車等の未来の位置を予測する。
【0040】
運転支援装置10は、規範行動候補群のリスク予測を行う(S4)。リスク予測では、自車のパスと他車等の可動物のパスとのクロスポイント(交差点)を算出し、クロスポイントでの接触のリスクを算出する。この場合、可動物の死角に潜在的に存在する可能性がある可動物に対して、潜在的な接触のリスクも算出される。運転支援装置10は、規範行動候補群について短期的リスク予測及び長期的リスク予測をそれぞれ行い、それぞれのリスクを算出する。
【0041】
運転支援装置10は、リスクが最小となり、移動効率が最大となる規範行動を規範行動候補から選択的に決定する(S5)。この場合の規範行動の決定は、ドライバー各人の運転行動の傾向に応じて決定する。
【0042】
運転支援装置10は、自車及び他車等の可動物の行動予測の実際の結果に対して、再度リスクを算出する(S6)。自車及び他車等の実際のパスが予測したパスから大きくずれている場合は、パスを外挿的に実時間で生成し、自車及び他車等のクロスポイントでのリスクを算出する。
【0043】
運転支援装置10は、規範行動と実際の運転行動との差を検出し、アクチュエータ類31や表示装置32を用いて運転支援を行なう(S7)。
【0044】
以下、重要な工程について詳述する。まず、マルチスケール認知(S1)について説明する。図3に示すように、ECU20内あるいは自車外部のデータベースには、例えば四差路交差点進入の状況について、典型的な事故を防ぐための概念の大きさを考慮して、知識として保持されている。
【0045】
ここで、例えば、レーダセンサ12やカメラセンサ13あるいは路車間通信機17で受信した路側のセンサが検出した物に関する情報で、何かの「足」が情報Inf0として認知できたと仮定する。この場合、運転支援装置10のECU20は、微視的な観点から「SHIFT」、「HOG」、「Haar」といった特徴量に関する情報を図3のデータベースから抽出することができる。また、運転支援装置10のECU20は、巨視的な観点から「人/自転車」といった対象物が何であるのかに関する情報を図3のデータベースから抽出することができる。さらに、他の階層の情報を抽出しても良い。
【0046】
本実施形態では、マルチスケールな概念のネットワーク構造を使って、典型的な事故を誘引する対象を漏れなく検出することを試みるようにしたので、危険予測の精度を上げることができる。さらに、三叉路、単路その他の交通状況から得られたマルチスケール認知を複合させることにより、事故を起こさないための知識が総合的に表現できる。以上のように、マルチスケール認知では、取得できた情報の範囲で、より有用な認知が可能となる。
【0047】
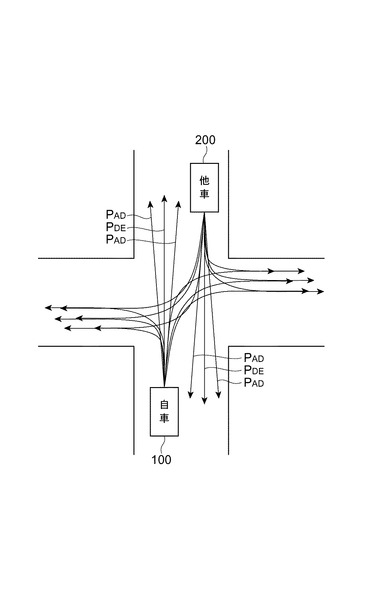
次に、パス設定(S2)について説明する。ここでは、前提として、レーダセンサ12、カメラセンサ13、ナビゲーションシステム14及び路車間通信機17等により、道路形状に関する情報が取得できているものと仮定する。図4に示す交差点での状況では、運転支援装置10のECU20は、路上に障害物がない場合の理想的な自車100及び他車200の右左折、直進のパスであるデフォルトパスPDEを想定する。また、運転支援装置10のECU20は、デフォルトパスPDEに付随して、パスの変種であるアダプティブパスPADを想定する。ここで、ECU20は、パスは車両のキネマティクスを考慮して部分的(区分的)に準備しておき、これらを即時的な処理で繋げる。本実施形態では、パスを複数化することにより、自車及び他車等についてのリスク予測の精度を向上できる。
【0048】
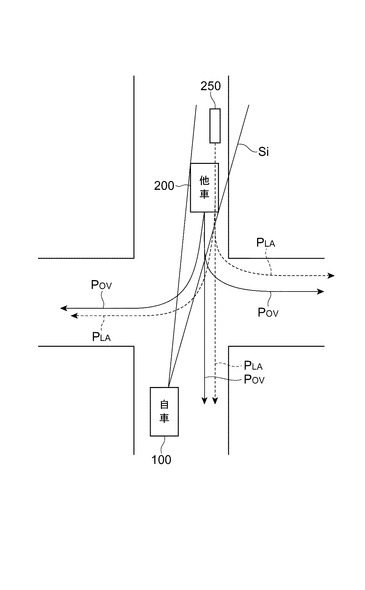
また、本実施形態では、図5に示すように、視界Si内にあり直接に認知可能な他車200の経路である顕在パスPOVと、他車200の影に隠れ直接に認知不可能ではあるが存在が予想される自動二輪等の潜在物体250の経路である潜在パスPLAとをECU20は予測する。本実施形態では、潜在パスPLAを予測することで、マルチスケール認知で想定した潜在的に存在する物体に対するリスク予測を行うことができる。
【0049】
なお、以上のパス設定については、予め道路形状や交通状況に対応したパスをデータべースに格納しておき、それらを自車が走行時に置かれた状況に合わせて抽出することができる。また、即時的に道路形状や交通状況に合わせてパスを導出しても良い。
【0050】
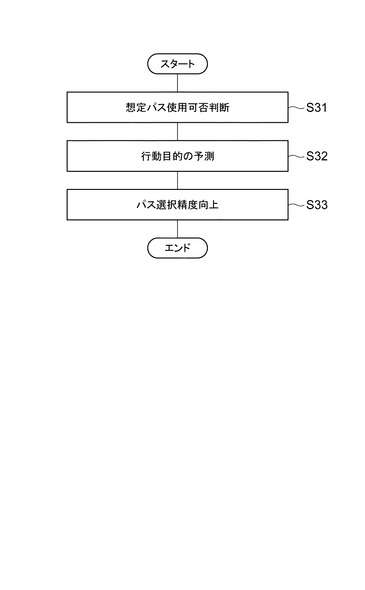
以下、行動予測の前提として、自車及び他車等がどの想定したどのパス上を移動するかを、段階的に予測する手法について説明する。ECU20は想定したパスの使用可否の判断を行う(S31)。すなわち、ECU20は、自車及び他車等が想定しているパスと大きく離れた動きをしているか否かを判断する。ECU20は、自車及び他車等の実際のパスと最も近い想定したパスとの距離を時系列的に観測し、観測時間の区間において、想定したパスと実際のパスとの距離が、ある閾値以上となる時間が一定以上の時間続いた場合、当該想定したパスは使用できないと判断し、自車及び他車等の実際の動きに沿ってパスを外挿的に生成する。
【0051】
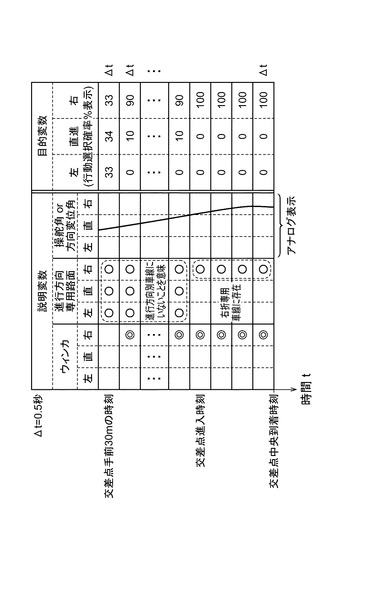
次に、ECU20は、行動目的の予測を行う(S32)。図7に示すようなECU20内あるいは自車外部のデータベースにおいて、自車あるいは他車等の行動の条件を示す説明変数と、パスの重み付けに用いられる目的変数とが対応付けて記憶されている。ECU20は、説明変数と実際の自車及び他車等の行動とが一致することを条件として、目的変数を判定する。ただし、操舵角又は方位変位角については、アナログ値を右左折及び直進の3つの離散値として判定する。
【0052】
ECU20は、行動目的の予測を踏まえてパスの選択精度を向上する(S31)。ECU20は、行動目的の予測の結果ごとに、複数準備したパスを目的変数として、自車及び他車等の行動をどのパスに割り振れば良いかを、バギング法、ブースティング法、ランダムフォレスト法等の集団学習法やカーネル法等で決定する。
【0053】
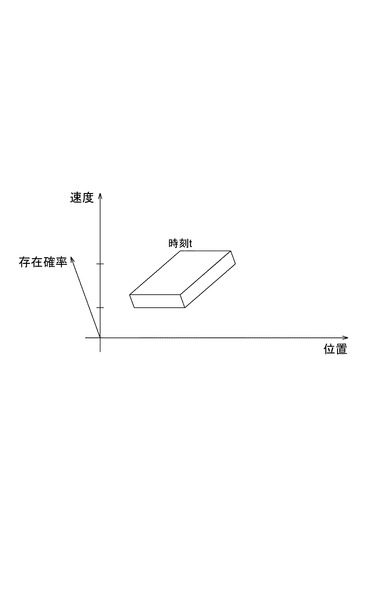
以下、行動予測(S3)及びリスク予測(S4)について説明する。本実施形態では、基本的な考え方として、想定したパス上を物体が動くものとし、パス上の位置と速さとが座標軸とする空間上で、物体の存在を同時確率密度関数でモデル化される。モデル化した確率密度関数の各々の位置、速度において等加速度運動が仮定され、未来のパス上の位置が予測される。以下、具体的な例を挙げて説明する。
【0054】
図8に示すように、物体Xi(1)〜Xi(n)は、パスCi(t)上を動くものと仮定する。ここで、nは物体の数を表し、tは時間を表す。パスの目盛が等間隔になるように、パスCiの時間パラメータを選ぶものとする。ある物体Xi(k)の時刻t=0でのパスCi(t)上の位置を原点とすると(以下、添え字のkを省略する)、時刻tでの物体の位置xiは、下式(1)によって計算することができる。
【数1】

【0055】
上式(1)でのノルムは計量から定義するものとする。ある時刻tにおけるパスCi(t)上の位置と速さとの空間上に物体Xiの情報が、関数Pt(x,v)として分布しているものとする。位置や速さの情報には、様々な誤差が含まれているので、これらを分布モデルとして表現することにする。この場合、図8のようになる。
【0056】
物体は等加速度運動をするものと仮定しているので、時刻t=0の場合(x0,v0)とすると、時刻tの場合は、(x0+v0・t+α・t2/2,v0+α・t)となる。ここで、αは加速度(定数)を表す。従って、この座標変換では面積が保存される。v座標に関して関数Pt(x,v)をファイバー積分したものをQt(x)と定義する。関数Qt(x)は、時刻tにおける物体の存在確率を表す。すなわち、0≦Qt(x)≦1となる。
【0057】
物体Xiが時刻tにおいて、クロスポイントに存在する確率は、xcをクロスポイントの位置とすると、下式(2)で計算することができる。なお、下式(2)において、δはデルタ関数である。
【数2】
【0058】
上式(2)のp(t)を自車がクロスポイントを通過する時間[t1,t2]にわたって積分すると、他車等の物体に対する位置xcにおけるリスクRが下式(3)で計算することができる。ここで、時刻t1は自車の先頭がクロスポイントに乗る時刻であり、時刻t2は自車の後端がクロスポイントを通過する時刻である。
【数3】
【0059】
また、ECU20は、可動物の死角に潜在的に存在するかもしれない可動物に対しても、上述した潜在パスPLAについて、同様の処理を行い、潜在的なリスクも算出する。以上の処理により、パス上のクロスポイントでリスクを計算するため、道路の全域にわたって存在確率を計算するような手法と異なり、リスクの計算のコストを小さく抑えることができ、即時的な処理が可能となる。
【0060】
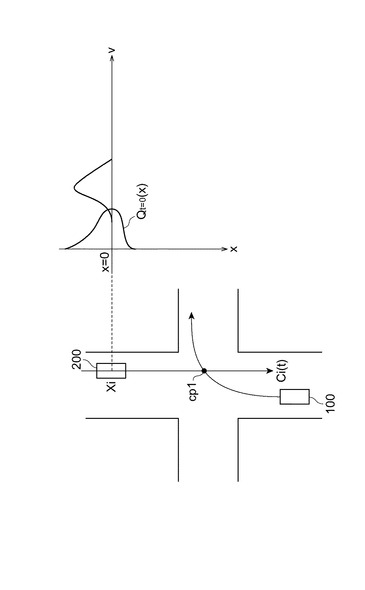
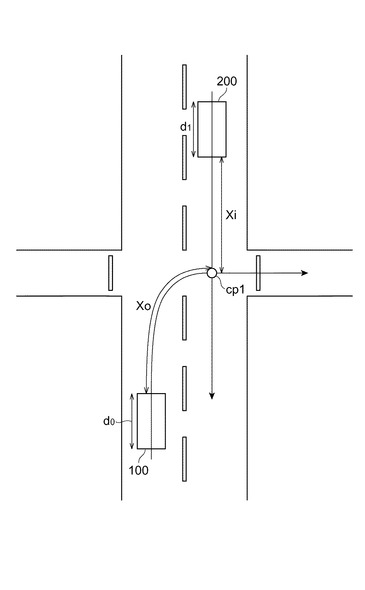
以下、さらに具体的な道路の状況において、実際に上記手法でリスクを計算し、行動候補のモデルにしたがって運転した結果を示す。図9に示す道路の状況において、他車200に対する自車100の接触のリスクの計算方法を以下に示す。図9に示すように、自車100は、クロスポイントcpからx0[m]離れた所に位置し、v0[m/s]の速度を持っている。また、自車100の全長はd0[m]である。
【0061】
他車200は、クロスポイントcpからx1[m]離れた所に位置し、平均v1[m/s]、幅dvの[v1−0.5dv,v1+0.5dv]の間に一様に分布するような速度分布を持っている。速度分布の積分値は1になるものとする。また、他車100の全長はd1[m]である。自車100の加速度及び減速度は、モデルパラメータで与えられた値を用い、それぞれaa0,ad0とする。他車の加速度はa1とし、誤差は考えない。
【0062】
リスクの計算では、以下の4つの手順を踏む。
(1)自車100及び他車200の速度プロファイルを生成
(2)自車100がクロスポイントcpを通過し始めてから、通過し終わるまでの時間(通過時間)を算出
(3)他車200の位置分布を算出
(4)他車200がクロスポイントcpにいる確率を通過時間にわたって積分し、リスク値を算出する
【0063】
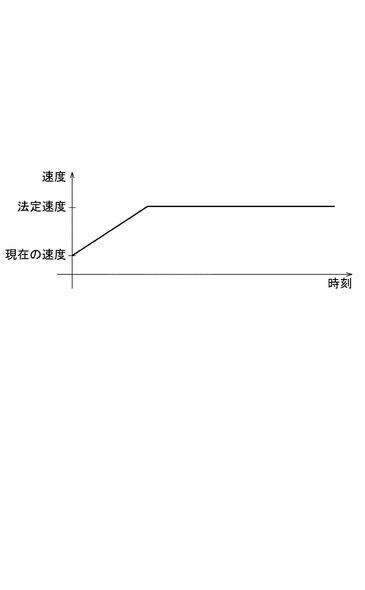
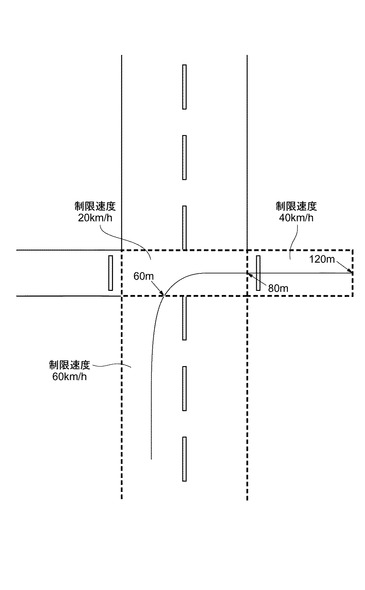
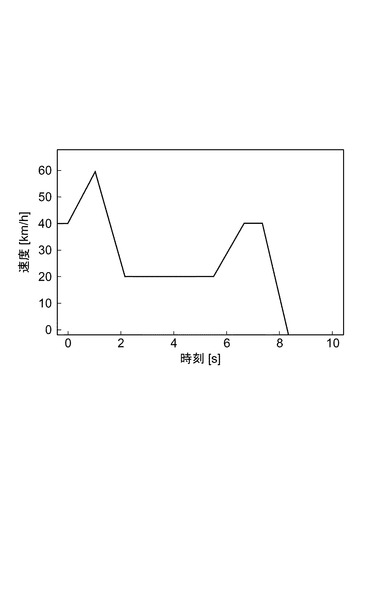
まず、自車100及び他車200の速度プロファイルを生成する。速度プロファイルとは、自車100及び他車200の運動する速度を時刻の関数として表したものである。図10に速度プロファイルの例を示す。自車100については、行動の選択肢に基づいて、モデルパラメータとして指定した加速度aa0あるいは減速度ad0で加減速し、道路の制限速度を守りつつ、停止すべき位置で停止できるような速度変化を求めて、それを速度プロファイルとする。生成された速度プロファイルの例として、図11に示すような制減速度を持つ道路において、図中にあるパスに沿って運動した場合のものを図12に示す。
【0064】
図12に示すように、加速度としては、5秒間で0km/hから60km/hまで加速できる加速度を用いた。減速度としては、5秒間で60km/hから0km/hまで減速できる減速度を用いた。また、パス上の位置0mにおける速度である初速度は40km/hとした。他車200については、加速度は他車200の持つ値a1とし、道路の法定速度は考えずに運動するような速度プロファイルを生成して用いる。
【0065】
物体の運動は、速度プロファイルから完全に計算することができる。物体の時刻tにおける位置x(t)は、時刻t=0から時刻tまで速度プロファイルを積分すれば良い。つまり、時刻Tにおける速度をv(T)として、下式(4)として求められる。
【数4】
【0066】
時刻tにおける速度は、時刻tにおける速度プロファイルの値v(t)である。また、物体が位置Xに来る時刻は、下式(5)のようなtについての方程式を解けば良い。
【数5】
【0067】
この例のモデルでは、速度に負の値を許していないため、位置は時刻に対して単調に増加するため、下式(5)の方程式はかならず1つの解を持ち、簡単に解くことができる。
【0068】
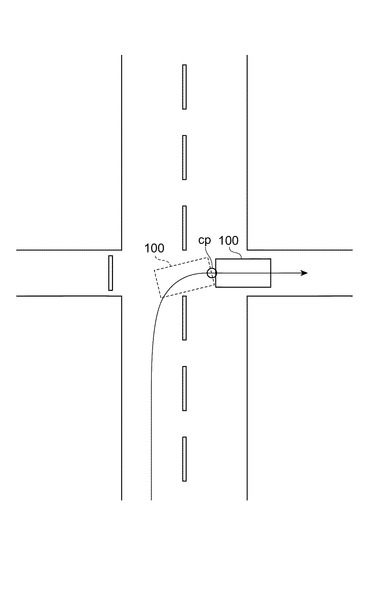
以下、自車100がクロスポイントcpを通過し始めてから、通過し終わるまでの通過時間を算出する手法について説明する。通過時間は、自車100の先頭部分がクロスポイントcpに乗ってから、自車100の後尾部分がクロスポイントcpを通過するまでの時間である。図13に自車100のクロスポイントcp通過の様子を示す。自車100の先頭部分がクロスポイントcpに乗る時刻及び自車100の後尾部分がクロスポイントcpを通過するまでの時刻は、速度プロファイルから算出できる。
【0069】
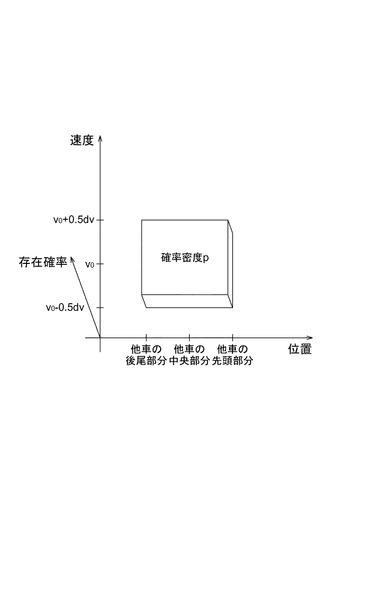
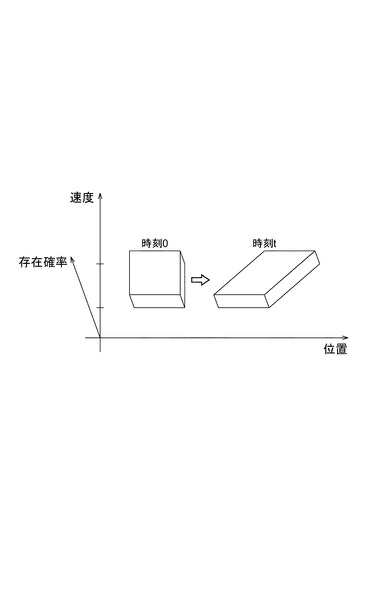
以下、他車200の位置分布を算出する手法について説明する。ある時刻における他車200の位置分布を算出する。時刻t=0(現在時刻とする)において、他車200は、位置・速度空間に図14に示すように分布している。図14の分布を他車200の速度プロファイル(等加速度運動)に従って時間発展させると、速度が速いほど先に進み、図15に示すような分布となる。図15に示すように、時刻tにおける分布は時刻t=0における分布とは異なる形状に変化するが、等加速度運動(図15は加速度0の例)であり、加速度には誤差がないものとしていることから、任意の時刻で他車200の分布は必ず平行四辺形状となる。
【0070】
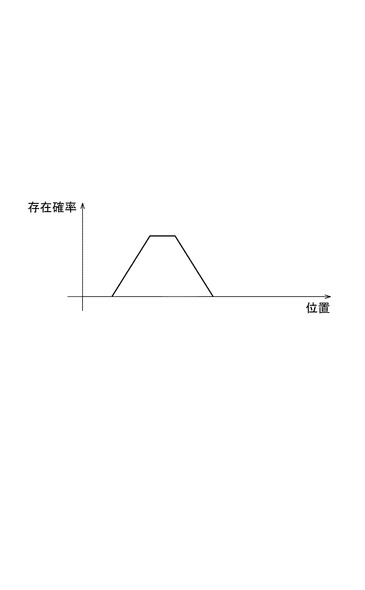
図15に示すような分布を速度について積分すると、時刻tにおける他車200の位置分布が得られる。つまり、時刻tにおける位置・速度空間における他車200の分布をPt(x,v)とすると、時刻tにおける他車の位置分布Qt(x)は、図16に示すような時刻tにおける分布を速度で積分した下式(6)で示される。
【数6】
【0071】
図16に示すような速度・位置空間における分布が平行四辺形状になることから、位置分布は図17に示すように必ず台形となる。この積分は、位置・速度空間における分布の幾何学的な性質から簡単に行うことができる。
【0072】
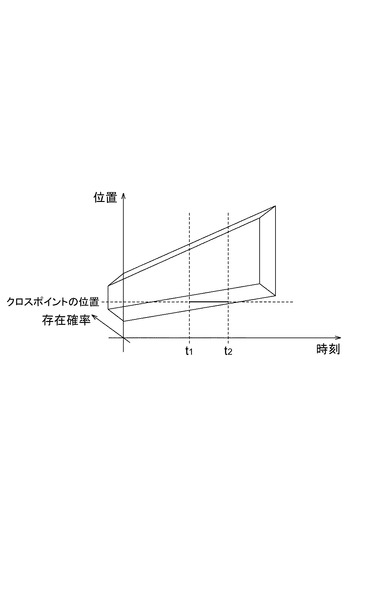
以下、他車200がクロスポイントcpにいる確率を通過時間にわたって積分し、リスク値を算出する手法について説明する。これは、自車100がクロスポイントcpに乗っている間に、他車200がクロスポイントcpに存在する確率を積分することに相当する。自車100のクロスポイントcpの通過時間を[t1,t2]とする。t1で自車100の先頭部分がクロスポイントcpに乗り、t2で自車100の後尾がクロスポイントcpを通過する。図18に、上記の通過時間にわたる他車200の位置分布の積分の概念図を示す。図中太線で示す通過時間[t1,t2]において存在確率が積分される。この積分は、数値積分法を用いて計算する。
【0073】
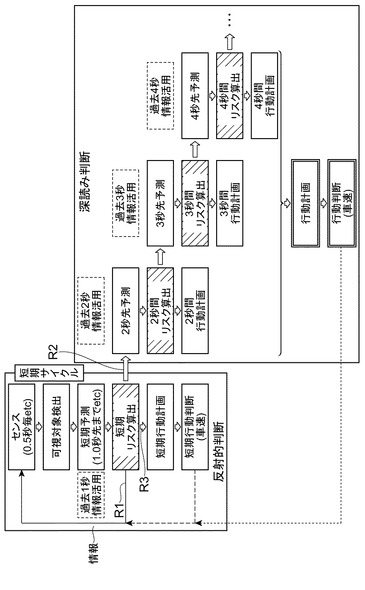
以下、本実施形態のリスク予測(S4)及び規範行動決定(S5)についてさらに詳述する。基本的な考え方として、本実施形態では、人間の運転行動のパターンを考えて、それと同様の選択肢を準備し、リスクが許容できる範囲であり、且つ移動効率の良い規範行動を選択する。図19に示すように、本実施形態では、短い時間の反射的なリスク回避(反射的判断)と並行して、長い時間の熟慮した上でのリスク回避(深読み判断)についてリスクを予測する。図19の例では、規範行動の決定基準を満たす解が例えば4秒以内の過去または未来にあると想定して、リスクを予測する。すなわち、本実施形態では、予測時間についてのマルチスケール化が図られる。
【0074】
図19に示すように、反射的判断においては、過去1秒の情報が活用される。図中に示されるように、例えば0.5秒ごとに自車100周辺の障害物を認知し、可視対象を検出する。例えば1秒先の未来までに限定した短期予測が行われ、短期リスクが算出される。ここで、短期リスクが閾値よりも大きい場合はルーチンR3に進み、短期の行動計画が設定され、車速等の短期行動の短期リスクの算出が再度行なわれる。
【0075】
一方、短期リスクが閾値よりも小さい場合は、ルーチンR1に進み、再度0.5秒ごとに短期リスクの算出が行なわれる。この場合、併せてルーチンR2が実行され、深読み判断が行われる。図中に示すように、2〜4秒先のリスク算出である2〜4秒リスク算出と2〜4秒間における行動計画である2〜4秒間行動計画の設定とが行われる。これらの2〜4秒間行動計画の中で、移動効率が最大であり、リスクが最小である行動計画が選択され、実行される。例えば、交差点中央手前で一時停止してから右折するか、一時停止しないで右折するかといった行動計画が選択される。ルーチンR3が実行されるときは、短期リスクが高いため、ルーチンR1及びルーチンR2は実行されない。選択された行動計画は、短期の行動計画と同様に、車速等の短期行動の短期リスクの算出が再度行なわれる。これらの行動計画は0.5秒ごとに随時更新され、常に最新の計画が採用される。
【0076】
以上のように、本実施形態では、1秒間の短期リスク算出及び2〜4秒間リスク算出は、複数の規範行動に対して並列で処理される。2〜4秒間行動計画については、移動効率が最大であり、リスクが最小である行動計画が選択されることにより、最適な行動計画が決定される。なお、上記の過去何秒間の情報を活用して、何秒先までのリスクを算出するかは、ドライバーの運転傾向から決定し、ドライバー個人に適した規範行動を決定しても良い。
【0077】
本実施形態では、基本的な考え方として自車100の行動目的ごとに自車100の複数の規範行動の選択肢が準備され、移動効率が最大であり、リスクが最小となるような基準で規範行動が選択される。この結果、規範車速等の規範行動が決定される。
【0078】
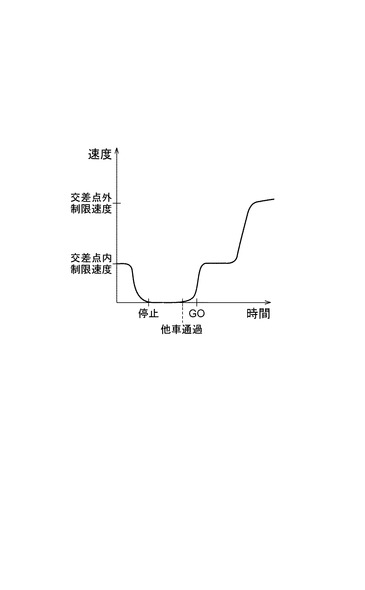
図20に示すように、対向車である他車200に対して自車100が右折する場合を想定する。図21に示すように、行動選択肢である規範行動1では一時停止をしないため、リスク予測値は、図22に示すように高く、移動効率は高いものとなる。一方、図23及び図24の規範行動2に示すように、自車100が右折中に一時停止をした場合、リスク予測値は、図25に示すように低いが、移動効率は低いものとなる。
【0079】
交差点右折行動の選択肢の大分類としては以下の4つが挙げられる。
(1)交差点前一時停止(信号、一時停止線などの規制により)
(2)交差点中央付近停止(対向車の存在により)
(3)右折先道路手前停止(右折先の歩行者の存在等により)
(4)停止せず右折
【0080】
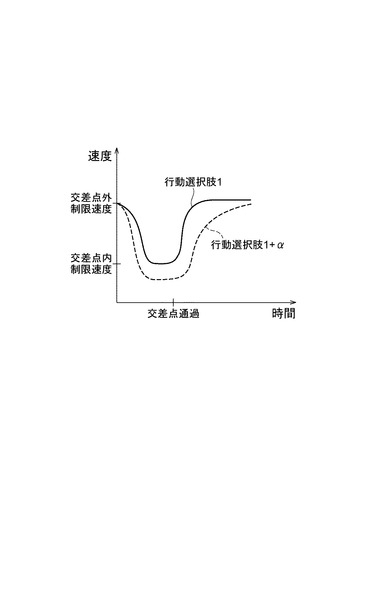
上記の交差点右折行動の状況において、規範行動1は上記の(4)の分類に属し、規範行動2は上記の(2)の分類に属す。上記(1)〜(4)のような大分類の中には、行動の選択肢の変種が複数存在する。例えば、行動選択肢である規範行動1と異なる選択肢として、図26に示すように、行動選択肢1+αがある。このように本実施形態では、想定される行動選択肢の大分類の中で、リスクが低く且つ移動効率が最も高い行動を、行動選択肢の大分類の中及び大分類の間で選択的に決定する。例えば、図26においても、もし、行動選択肢1と行動選択肢1+αとの予測されるリスクが同じであるのならば、移動効率がより良いため、行動選択肢1が選択される。
【0081】
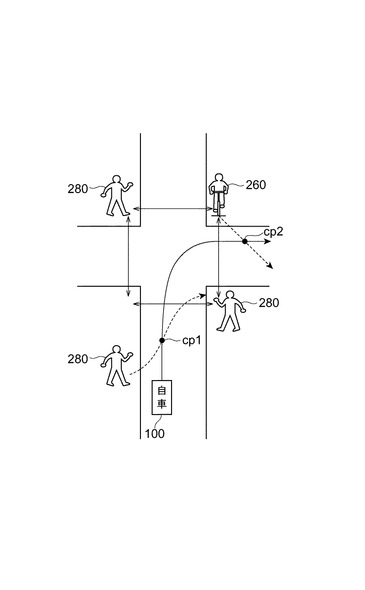
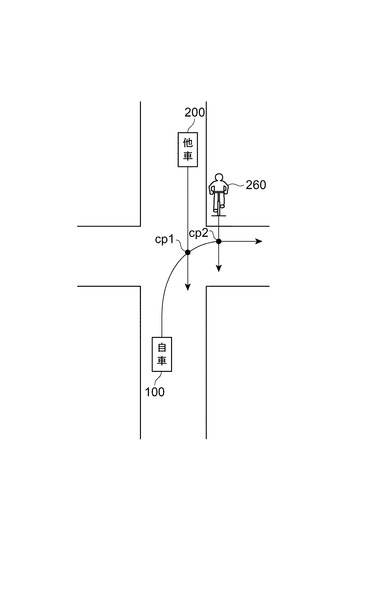
さらに、他車200については、例外的な場合以外は想定されたパスから大きくずれる場合は少ないが、図27に示すように、自転車260や歩行者280については、図中の実線に示す想定されるパスから、図中の破線に示すように大きくずれたパスを移動する可能性がある。このような破線に示すような行動については、ある単位時間ごとに過去の情報を使って予測することで求める。具体的には、簡単な運動の一次近似モデルまたは時系列解析における状態空間モデルなどで予測を行い、想定外のクロスポイントcp1,cp2についてもリスクを予測する。
【0082】
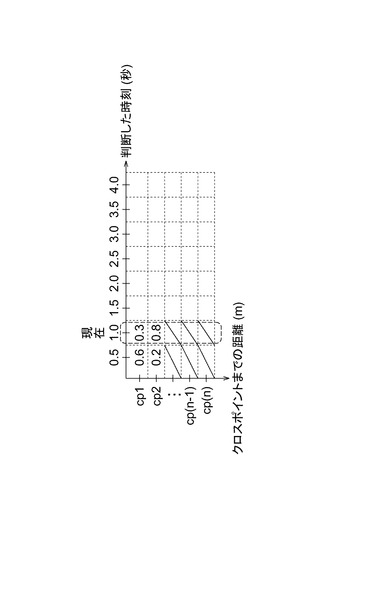
自車100と他車200等との接触可能性に関するリスク予測は、図28に示すように、さまざまなクロスポイントcp1〜cp(n)の到達時刻におけるリスク値をそれぞれ予測する。図中破線部で示される部分が、その時刻におけるCP(クロスポイント)ベクトルとなる。
【0083】
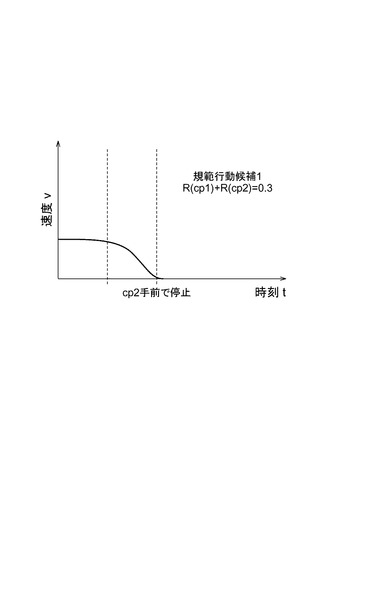
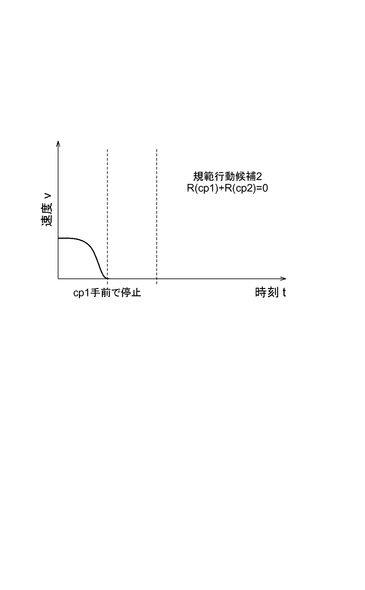
現時点のCPベクトルから図29に示すような各クロスポイントcp1等でのリスク値の和が算出され、リスク最小となる規範行動候補が選択される。例えば、図30〜32に示される規範行動候補1〜3では、リスク値Rが0となる規範行動候補2が選択される。ある一定のリスク許容値限界以下の規範候補があれば、目標地点までの移動効率によって規範運転が決定される。例えば、リスク許容値限界を0.4以下と設定すれば、図30〜32の中では、リスク値Rが0.3と0.4以下であり、移動効率が規範行動候補2よりも高い規範行動候補1が選択される。
【0084】
なお、上記の例では、過去、1期前(例えば、0.5秒前)の過去の車速等のデータから他車200等の位置及び速度を予測していたが、何秒かの過去のデータを用いても良い。例えば、何秒か過去のデータのデータ個数は以下のようになる。
(1)過去4秒間のデータを用いて車の位置及び速度を予測(データ個数8)
(2)過去3秒間のデータを用いて車の位置及び速度を予測(データ個数6)
(3)過去2秒間のデータを用いて車の位置及び速度を予測(データ個数4)
(4)過去1秒間のデータを用いて車の位置及び速度を予測(データ個数2)
(5)過去0.5秒間のデータを用いて車の位置及び速度を予測(データ個数1)
【0085】
過去のデータを観測することによって、他車200等及び自車100の行動予測精度の評価基準として、予測安定性が基準とされる。例えば、観測時間によって、予測結果が大きく変化する場合、過去の長い時間による予測結果は予測安定性が低く信頼性が低いため、過去1秒間等の短い時間の観測結果を使って予測が行われる。一方、観測時間によって予測結果が大きく変化しない場合は、予測安定性が高いため、過去1秒より長い時間の観測結果を使うことで、外乱に強い予測が行われる。
【0086】
本実施形態によれば、運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【0087】
また、本実施形態によれば、運転支援装置10のECU20は、自車100周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測し、規範行動候補に係る運転行動により自車100が走行した場合における移動効率を取得するため、自車100周辺の障害物と自車100との接触のリスクと、移動効率とを考慮に入れた規範行動候補を提供することが可能となる。
【0088】
また、ECU20は、自車100周辺の障害物について取得した情報と、情報に対してより巨視的な関連する情報及び障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて障害物をマルチスケール認知により認知し、障害物と自車100との接触のリスクを予測する。このため、障害物について取得された障害物情報が限定的なものであったとしても、得られた情報の範囲から、より巨視的又はより微視的な情報を得ることができ、より有益な障害物の認知が可能となる。
【0089】
また、ECU20は、自車100及び障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路であるデフォルトパスPDEと、一般経路とは異なる経路であるアダプティプパスPADとを予測しつつ、障害物と自車100との接触のリスクを予測するため、複数の経路を考慮に入れてリスクを予測する精度を向上させることができる。
【0090】
また、ECU20は、障害物の予測される経路について、直接に認知可能な障害物の経路である顕在パスPOVと、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在パスPLAとを予測しつつ、障害物と自車100との接触のリスクを予測するため、潜在的な障害物についてのリスクも予測することが可能となり、予測されるリスクの信頼性を向上させることができる。
【0091】
また、ECU20は、自車100及び障害物の予測される経路上に自車100及び障害物が存在する確率の確率分布に基づいて、障害物と自車100との接触のリスクを予測するため、例えば道路全域にわたって自車100及び障害物が存在する確率を計算する手法に比べて、少ない計算量で障害物と自車100との接触のリスクを予測することが可能となる。
【0092】
特に、ECU20は、自車100及び障害物の予測される経路上の位置と速さとを座標軸とする空間内に自車100及び障害物が存在する確率の確率分布に基づいて、障害物と自車100との接触のリスクを予測するため、少ない計算量で障害物と自車100との接触のリスクを予測することが可能となる。
【0093】
さらに、ECU20は、規範行動候補に係る運転行動により自車100が走行した場合について、現在から所定時間経過時における障害物と自車100との接触のリスクである短期リスクと、所定時間より長い時間の経過後における障害物と自車との接触のリスクである長期的な2〜4秒間リスクとをそれぞれ予測するため、規範行動候補について短期的視点と長期的視点とから、障害物と自車100との接触のリスクをより多角的に予測することが可能となる。
【0094】
加えて、ECU20は、短期リスクのリスク値が所定の閾値よりも大きく、当該規範行動候補に係る運転行動のリスクが短期的に極めて高いときは、当該規範行動候補は妥当性が低く、以後の長期的なリスクの予測の必要性は低いため、長期的なリスクの予測を中止することにより、不必要な計算量を低減することが可能となる。
【0095】
尚、本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0096】
10…運転支援装置、11…車速センサ、12…レーダセンサ、13…カメラセンサ、14…ナビゲーションシステム、15…方向指示器センサ、16…操舵角センサ、17…路車間通信機、18…ドライバ認証部、20…ECU、31…アクチュエータ類、32…表示装置、100…自車、200…他車、250…潜在物体、260…自転車、280…歩行者。
【技術分野】
【0001】
本発明は、運転支援装置に関し、特に、自車が走行するための規範となる運転支援を行なう運転支援装置に関するものである。
【背景技術】
【0002】
従来、自車が経路上を走行するための規範となる情報を提供する装置が提案されている。例えば、特許文献1には、車両周辺の走行環境と車両自体の状態とを総合的に判断して車両運転者への最適な運転支援を行うための装置が開示されている。この装置では、車両が置かれている走行環境を検出すると共に、車両の状態を検出する。検出された走行環境と車両状態とに基づいて車両の運転状態が推定される。また、走行環境に応じた走行の規範となる車両の運転理想モデルが算出される。そして、推定運転状態の運転理想モデルからの乖離の有無が演算され、乖離が生じている場合にはアクチュエータが駆動されることにより車両の運転支援が行なわれる。この装置では、交通規則やモラルに基づき運転理想モデルが算出される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−202512号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、どのような規範となるモデルであっても、自車周辺の障害物と自車との接触のリスクは存在する可能性がある。したがって、安全向上のために、当該リスクを考慮した運転支援を行なうことが望ましい。
【0005】
本発明は、このような実情に考慮してなされたものであり、その目的は、自車周辺の障害物と自車との接触のリスクを考慮に入れた自車が走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測するリスク予測手段を備えた運転支援装置である。
【0007】
この構成によれば、リスク予測手段は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測するため、自車周辺の障害物と自車との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【0008】
また、本発明は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測するリスク予測手段と、規範行動候補に係る運転行動により自車が走行した場合における移動効率を取得する移動効率取得手段とを備えた運転支援装置である。
【0009】
この構成によれば、リスク予測手段は、自車周辺の状況に対する自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車が走行した場合における自車周辺の障害物と自車との接触のリスクを予測し、移動効率取得手段は、規範行動候補に係る運転行動により自車が走行した場合における移動効率を取得するため、自車周辺の障害物と自車との接触のリスクと、移動効率とを考慮に入れた規範行動候補を提供することが可能となる。
【0010】
この場合、リスク予測手段は、自車周辺の障害物について取得した障害物情報と、障害物情報に対してより巨視的な関連する情報及び障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて障害物を認知し、障害物と自車との接触のリスクを予測することが好適である。
【0011】
この構成によれば、リスク予測手段は、自車周辺の障害物について取得した障害物情報と、障害物情報に対してより巨視的な関連する情報及び障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて障害物を認知し、障害物と自車との接触のリスクを予測する。このため、障害物について取得された障害物情報が限定的なものであったとしても、得られた情報の範囲から、より巨視的又はより微視的な情報を得ることができ、より有益な障害物の認知が可能となる。
【0012】
また、リスク予測手段は、自車及び障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路である通常経路と、一般経路とは異なる経路である変則経路とを予測しつつ、障害物と自車との接触のリスクを予測することが好適である。
【0013】
この構成によれば、リスク予測手段は、自車及び障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路である通常経路と、一般経路とは異なる経路である変則経路とを予測しつつ、障害物と自車との接触のリスクを予測するため、複数の経路を考慮に入れてリスクを予測する精度を向上させることができる。
【0014】
この場合、リスク予測手段は、障害物の予測される経路について、直接に認知可能な障害物の経路である顕在的経路と、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在的経路とを予測しつつ、障害物と自車との接触のリスクを予測することが好適である。
【0015】
この構成によれば、リスク予測手段は、障害物の予測される経路について、直接に認知可能な障害物の経路である顕在的経路と、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在的経路とを予測しつつ、障害物と自車との接触のリスクを予測するため、潜在的な障害物についてのリスクも予測することが可能となり、予測されるリスクの信頼性を向上させることができる。
【0016】
また、リスク予測手段は、自車及び障害物の予測される経路上に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測することが好適である。
【0017】
この構成によれば、リスク予測手段は、自車及び障害物の予測される経路上に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測するため、例えば道路全域にわたって自車及び障害物が存在する確率を計算する手法に比べて、少ない計算量で障害物と自車との接触のリスクを予測することが可能となる。
【0018】
この場合、リスク予測手段は、自車及び障害物の予測される経路上の位置と速さとを座標軸とする空間内に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測することが好適である。
【0019】
この構成によれば、リスク予測手段は、自車及び障害物の予測される経路上の位置と速さとを座標軸とする空間内に自車及び障害物が存在する確率の確率分布に基づいて、障害物と自車との接触のリスクを予測するため、少ない計算量で障害物と自車との接触のリスクを予測することが可能となる。
【0020】
また、リスク予測手段は、規範行動候補に係る運転行動により自車が走行した場合について、現在から所定時間経過時における障害物と自車との接触のリスクである短期的リスクと、所定時間より長い時間の経過後における障害物と自車との接触のリスクである長期的リスクとをそれぞれ予測することが好適である。
【0021】
この構成によれば、リスク予測手段は、規範行動候補に係る運転行動により自車が走行した場合について、現在から所定時間経過時における障害物と自車との接触のリスクである短期的リスクと、所定時間より長い時間の経過後における障害物と自車との接触のリスクである長期的リスクとをそれぞれ予測するため、規範行動候補について短期的視点と長期的視点とから、障害物と自車との接触のリスクをより多角的に予測することが可能となる。
【0022】
この場合、リスク予測手段は、短期的リスクが所定の閾値よりも大きいときは、規範行動候補に係る運転行動により自車が走行した場合についての長期的リスクの予測を中止することが好適である。
【0023】
この構成によれば、リスク予測手段は、短期的リスクが所定の閾値よりも大きく、当該規範行動候補に係る運転行動のリスクが短期的に極めて高いときは、当該規範行動候補は妥当性が低く、以後の長期的リスクの予測の必要性は低いため、長期的リスクの予測を中止することにより、不必要な計算量を低減することが可能となる。
【発明の効果】
【0024】
本発明の運転支援装置によれば、自車周辺の障害物と自車との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【図面の簡単な説明】
【0025】
【図1】実施形態に係る運転支援装置の構成を示すブロック図である。
【図2】実施形態に係る運転支援装置の動作の概略を示すフローチャートである。
【図3】マルチスケール認知の概念を示す図である。
【図4】パス設定におけるデフォルトパスとアダプティブパスとを示す平面図である。
【図5】パス設定における顕在パスと潜在パスとを示す平面図である。
【図6】自車及び他車の行動予測の動作の詳細を示すフローチャートである。
【図7】行動目的の予測で用いられる説明変数と目的変数との関係を示す表である。
【図8】行動予測における物体の位置と速さとの空間上における存在確率の分布を示す図である。
【図9】リスク予測において想定される状況を示す平面図である。
【図10】自車及び他車の速度プロファイルを示すグラフである。
【図11】想定される交差点の各部の制限速度を示す平面図である。
【図12】交差点通過時の速度プロファイルを示すグラフである。
【図13】自車の先端部分がクロスポイント上に乗ってから自車の後尾部分がクロスポイントを通過する様子を示す平面図である。
【図14】現時刻における他車の存在確率の分布を示すグラフである。
【図15】時刻0と時刻tとにおける他車の存在確率の分布を示すグラフである。
【図16】時刻tにおける他車の存在確率の分布を示すグラフである。
【図17】図16のグラフを速度について積分した他車の位置に対する存在確率の分布を示すグラフである。
【図18】通過時刻にわたる他車の位置に対する存在確率の分布を示すグラフである。
【図19】反射的判断と長期的判断とを組み合わせたリスク予測及び規範行動判断の手順を示す図である。
【図20】規範行動のリスク予測及び規範行動判断で想定される状況を示す平面図である。
【図21】図20の状況の規範行動候補の速度プロファイルを示すグラフである。
【図22】図21に規範行動候補における時間ごとのリスク予測値を示すグラフである。
【図23】図20の状況で自車が停止した場合の状況を示す平面図である。
【図24】図23の状況の規範行動候補の速度プロファイルを示すグラフである。
【図25】図24に規範行動候補における時間ごとのリスク予測値を示すグラフである。
【図26】規範行動候補ごとの速度プロファイルを示すグラフである。
【図27】歩行者及び自転車等に対するリスク予測を行う状況を示す平面図である。
【図28】各クロスポイント到達時刻でのリスク値を判断した時刻ごとに示した表である。
【図29】自車と他車及び自転車とのクロスポイントを示す平面図である。
【図30】規範行動候補1の速度プロファイルを示すグラフである。
【図31】規範行動候補2の速度プロファイルを示すグラフである。
【図32】規範行動候補3の速度プロファイルを示すグラフである。
【発明を実施するための形態】
【0026】
以下、図面を参照して本発明の実施形態に係る運転支援装置を説明する。本実施形態の運転支援装置は車両に搭載され、自車のドライバーに、経路を低いリスクで且つ高い移動効率で走行するための規範となる規範行動を提供するための装置である。図1に示すように、本実施形態の運転支援装置10は、車速センサ11、レーダセンサ12、カメラセンサ13、ナビゲーションシステム14、方向指示器センサ15、操舵角センサ16、路車間通信機17、ドライバ認証部18、ECU20、アクチュエータ類31及び表示装置32を備えている。
【0027】
車速センサ11は、自車の車軸の回転速度から自車の速度を検出するためのセンサである。
【0028】
レーダセンサ12は、例えば自車前方にミリ波を照射することにより、自車前方の他の自動車、自動二輪車、自転車及び歩行者等の障害物を認知するためのものである。また、レーダセンサ12は、道路上に固定された障害物や、道路の線形、曲率半径、勾配等の道路形状を認知するためのものである。
【0029】
カメラセンサ13は、自車前方を撮像し、パターン認識等により、自車前方の他の自動車、自動二輪車、自転車及び歩行者等の障害物を認知するためのものである。また、カメラセンサ13は、パターン認識等により、道路上に固定された障害物や、道路の線形、曲率半径、勾配等の道路形状を認知するためのものである。
【0030】
ナビゲーションシステム14は、GPS(Global Positioning System)による自車の測位とデータベース内の地図情報とに基づいて自車が走行する道路の線形、曲率半径、勾配等の道路形状に関する情報を取得するためのものである。ナビゲーションシステム14は、ドライバーが入力した目的地や経路についての情報から、自車の経路を推定するためにも用いられる。
【0031】
方向指示器センサ15は、自車の方向指示器(ウインカ)の指示する方向を検出するためのものである。方向指示器センサ15は、自車の経路を推定するために用いられる。操舵角センサ16は、自車の操舵角を検出するためのセンサである。操舵角センサ16は、自車の経路を推定するために用いられる。
【0032】
路車間通信機17は、光ビーコン送信機等の路側の施設から自車前方の道路の線形、曲率半径、勾配等の道路形状に関する情報を取得するためのものである。また、路車間通信機17は、路側のセンサで検出した他車、歩行者等の障害物に関する情報を受信するためのものである。さらに、路車間通信機17は、自車が走行する道路の交通量、渋滞、事故、交通規制等の道路の状態に関する情報を取得するためにも用いられる。
【0033】
ドライバ認証部18は、自車を運転するドライバーを認証するためのものである。ドライバ認証部18は、ドライバーによる暗証番号等の入力や、IDカード等の挿入や、ドライバーの指紋、網膜、虹彩等を識別することによる生体認証等により、ドライバーを認証する。
【0034】
ECU(Electronic Control Unit)20は、車速センサ11等から得られた情報に基づいて、自車周辺の状況に対する自車の規範的な運転行動の候補である幾つかの規範行動候補について、自車周辺の障害物と自車とが接触するリスクと、当該規範行動候補に係る運転行動により自車が走行した場合の移動効率とを予測する。
【0035】
アクチュエータ類31は、ECU20が算出した規範行動候補あるいは規範行動候補から選択された規範行動に基づいて、ドライバーの運転操作に介入して、自車のブレーキやアクセルを駆動させるブレーキアクチュエータやアクセルアクチュエータである。また、アクチュエータ類31は、例えば、ドライバーのアクセル操作に対して反力を与えるものでも良い。
【0036】
表示装置32は、ドライバーに画像を表示するディスプレイや、ドライバーに音声案内を行うスピーカや、ドライバーに警報を与えるブザーである。表示装置32は、ドライバーにECU20が算出した規範行動候補に基づいた情報を提示するためのものである。
【0037】
以下、本実施形態の運転支援装置10の動作について説明する。まず、運転支援装置10の動作の概略について説明する。図2に示すように、本実施形態の運転支援装置10は、自車周辺の他車等の障害物について、マルチスケール認知による環境認識を行う(S1)。マルチスケール認知は、事故パターンの分析において、事故を回避するための着眼点のカテゴリーを、微視的に細部まで着眼するカテゴリーから、巨視的に全体を把握するカテゴリーまで階層的に多層化することで、自車の置かれた状況に適したカテゴリーの中からリスク予測の対象となり得る障害物を認知し選択する。
【0038】
運転支援装置10は、パス設定による規範行動候補を選択する(S2)。自車のパス(経路)及び他車のパスの設定は、それぞれのパスを予め複数想定し、パスに当該他車等の可動物を重み付けで割り振り、0.5秒等の短い周期の観測結果ごとにマルチスケール認知を活用して、割り振りの重み付けを更新する。この段階では、パスを1つに絞り込む必要はない。また、パスの設定は、直接に認知可能な障害物の経路である顕在パスと、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在パスとの2種類を設定する。
【0039】
運転支援装置10は、自車及び他車等の障害物の行動を予測する(S3)。この行動予測では、パス上の位置x、速度vを座標とした(x,v)空間上に自車及び他車等が存在する確率分布をセンサ等から得られた情報から推定し、この確率分布を時間ごとに変化させることで、自車及び他車等の未来の位置を予測する。
【0040】
運転支援装置10は、規範行動候補群のリスク予測を行う(S4)。リスク予測では、自車のパスと他車等の可動物のパスとのクロスポイント(交差点)を算出し、クロスポイントでの接触のリスクを算出する。この場合、可動物の死角に潜在的に存在する可能性がある可動物に対して、潜在的な接触のリスクも算出される。運転支援装置10は、規範行動候補群について短期的リスク予測及び長期的リスク予測をそれぞれ行い、それぞれのリスクを算出する。
【0041】
運転支援装置10は、リスクが最小となり、移動効率が最大となる規範行動を規範行動候補から選択的に決定する(S5)。この場合の規範行動の決定は、ドライバー各人の運転行動の傾向に応じて決定する。
【0042】
運転支援装置10は、自車及び他車等の可動物の行動予測の実際の結果に対して、再度リスクを算出する(S6)。自車及び他車等の実際のパスが予測したパスから大きくずれている場合は、パスを外挿的に実時間で生成し、自車及び他車等のクロスポイントでのリスクを算出する。
【0043】
運転支援装置10は、規範行動と実際の運転行動との差を検出し、アクチュエータ類31や表示装置32を用いて運転支援を行なう(S7)。
【0044】
以下、重要な工程について詳述する。まず、マルチスケール認知(S1)について説明する。図3に示すように、ECU20内あるいは自車外部のデータベースには、例えば四差路交差点進入の状況について、典型的な事故を防ぐための概念の大きさを考慮して、知識として保持されている。
【0045】
ここで、例えば、レーダセンサ12やカメラセンサ13あるいは路車間通信機17で受信した路側のセンサが検出した物に関する情報で、何かの「足」が情報Inf0として認知できたと仮定する。この場合、運転支援装置10のECU20は、微視的な観点から「SHIFT」、「HOG」、「Haar」といった特徴量に関する情報を図3のデータベースから抽出することができる。また、運転支援装置10のECU20は、巨視的な観点から「人/自転車」といった対象物が何であるのかに関する情報を図3のデータベースから抽出することができる。さらに、他の階層の情報を抽出しても良い。
【0046】
本実施形態では、マルチスケールな概念のネットワーク構造を使って、典型的な事故を誘引する対象を漏れなく検出することを試みるようにしたので、危険予測の精度を上げることができる。さらに、三叉路、単路その他の交通状況から得られたマルチスケール認知を複合させることにより、事故を起こさないための知識が総合的に表現できる。以上のように、マルチスケール認知では、取得できた情報の範囲で、より有用な認知が可能となる。
【0047】
次に、パス設定(S2)について説明する。ここでは、前提として、レーダセンサ12、カメラセンサ13、ナビゲーションシステム14及び路車間通信機17等により、道路形状に関する情報が取得できているものと仮定する。図4に示す交差点での状況では、運転支援装置10のECU20は、路上に障害物がない場合の理想的な自車100及び他車200の右左折、直進のパスであるデフォルトパスPDEを想定する。また、運転支援装置10のECU20は、デフォルトパスPDEに付随して、パスの変種であるアダプティブパスPADを想定する。ここで、ECU20は、パスは車両のキネマティクスを考慮して部分的(区分的)に準備しておき、これらを即時的な処理で繋げる。本実施形態では、パスを複数化することにより、自車及び他車等についてのリスク予測の精度を向上できる。
【0048】
また、本実施形態では、図5に示すように、視界Si内にあり直接に認知可能な他車200の経路である顕在パスPOVと、他車200の影に隠れ直接に認知不可能ではあるが存在が予想される自動二輪等の潜在物体250の経路である潜在パスPLAとをECU20は予測する。本実施形態では、潜在パスPLAを予測することで、マルチスケール認知で想定した潜在的に存在する物体に対するリスク予測を行うことができる。
【0049】
なお、以上のパス設定については、予め道路形状や交通状況に対応したパスをデータべースに格納しておき、それらを自車が走行時に置かれた状況に合わせて抽出することができる。また、即時的に道路形状や交通状況に合わせてパスを導出しても良い。
【0050】
以下、行動予測の前提として、自車及び他車等がどの想定したどのパス上を移動するかを、段階的に予測する手法について説明する。ECU20は想定したパスの使用可否の判断を行う(S31)。すなわち、ECU20は、自車及び他車等が想定しているパスと大きく離れた動きをしているか否かを判断する。ECU20は、自車及び他車等の実際のパスと最も近い想定したパスとの距離を時系列的に観測し、観測時間の区間において、想定したパスと実際のパスとの距離が、ある閾値以上となる時間が一定以上の時間続いた場合、当該想定したパスは使用できないと判断し、自車及び他車等の実際の動きに沿ってパスを外挿的に生成する。
【0051】
次に、ECU20は、行動目的の予測を行う(S32)。図7に示すようなECU20内あるいは自車外部のデータベースにおいて、自車あるいは他車等の行動の条件を示す説明変数と、パスの重み付けに用いられる目的変数とが対応付けて記憶されている。ECU20は、説明変数と実際の自車及び他車等の行動とが一致することを条件として、目的変数を判定する。ただし、操舵角又は方位変位角については、アナログ値を右左折及び直進の3つの離散値として判定する。
【0052】
ECU20は、行動目的の予測を踏まえてパスの選択精度を向上する(S31)。ECU20は、行動目的の予測の結果ごとに、複数準備したパスを目的変数として、自車及び他車等の行動をどのパスに割り振れば良いかを、バギング法、ブースティング法、ランダムフォレスト法等の集団学習法やカーネル法等で決定する。
【0053】
以下、行動予測(S3)及びリスク予測(S4)について説明する。本実施形態では、基本的な考え方として、想定したパス上を物体が動くものとし、パス上の位置と速さとが座標軸とする空間上で、物体の存在を同時確率密度関数でモデル化される。モデル化した確率密度関数の各々の位置、速度において等加速度運動が仮定され、未来のパス上の位置が予測される。以下、具体的な例を挙げて説明する。
【0054】
図8に示すように、物体Xi(1)〜Xi(n)は、パスCi(t)上を動くものと仮定する。ここで、nは物体の数を表し、tは時間を表す。パスの目盛が等間隔になるように、パスCiの時間パラメータを選ぶものとする。ある物体Xi(k)の時刻t=0でのパスCi(t)上の位置を原点とすると(以下、添え字のkを省略する)、時刻tでの物体の位置xiは、下式(1)によって計算することができる。
【数1】
【0055】
上式(1)でのノルムは計量から定義するものとする。ある時刻tにおけるパスCi(t)上の位置と速さとの空間上に物体Xiの情報が、関数Pt(x,v)として分布しているものとする。位置や速さの情報には、様々な誤差が含まれているので、これらを分布モデルとして表現することにする。この場合、図8のようになる。
【0056】
物体は等加速度運動をするものと仮定しているので、時刻t=0の場合(x0,v0)とすると、時刻tの場合は、(x0+v0・t+α・t2/2,v0+α・t)となる。ここで、αは加速度(定数)を表す。従って、この座標変換では面積が保存される。v座標に関して関数Pt(x,v)をファイバー積分したものをQt(x)と定義する。関数Qt(x)は、時刻tにおける物体の存在確率を表す。すなわち、0≦Qt(x)≦1となる。
【0057】
物体Xiが時刻tにおいて、クロスポイントに存在する確率は、xcをクロスポイントの位置とすると、下式(2)で計算することができる。なお、下式(2)において、δはデルタ関数である。
【数2】
【0058】
上式(2)のp(t)を自車がクロスポイントを通過する時間[t1,t2]にわたって積分すると、他車等の物体に対する位置xcにおけるリスクRが下式(3)で計算することができる。ここで、時刻t1は自車の先頭がクロスポイントに乗る時刻であり、時刻t2は自車の後端がクロスポイントを通過する時刻である。
【数3】
【0059】
また、ECU20は、可動物の死角に潜在的に存在するかもしれない可動物に対しても、上述した潜在パスPLAについて、同様の処理を行い、潜在的なリスクも算出する。以上の処理により、パス上のクロスポイントでリスクを計算するため、道路の全域にわたって存在確率を計算するような手法と異なり、リスクの計算のコストを小さく抑えることができ、即時的な処理が可能となる。
【0060】
以下、さらに具体的な道路の状況において、実際に上記手法でリスクを計算し、行動候補のモデルにしたがって運転した結果を示す。図9に示す道路の状況において、他車200に対する自車100の接触のリスクの計算方法を以下に示す。図9に示すように、自車100は、クロスポイントcpからx0[m]離れた所に位置し、v0[m/s]の速度を持っている。また、自車100の全長はd0[m]である。
【0061】
他車200は、クロスポイントcpからx1[m]離れた所に位置し、平均v1[m/s]、幅dvの[v1−0.5dv,v1+0.5dv]の間に一様に分布するような速度分布を持っている。速度分布の積分値は1になるものとする。また、他車100の全長はd1[m]である。自車100の加速度及び減速度は、モデルパラメータで与えられた値を用い、それぞれaa0,ad0とする。他車の加速度はa1とし、誤差は考えない。
【0062】
リスクの計算では、以下の4つの手順を踏む。
(1)自車100及び他車200の速度プロファイルを生成
(2)自車100がクロスポイントcpを通過し始めてから、通過し終わるまでの時間(通過時間)を算出
(3)他車200の位置分布を算出
(4)他車200がクロスポイントcpにいる確率を通過時間にわたって積分し、リスク値を算出する
【0063】
まず、自車100及び他車200の速度プロファイルを生成する。速度プロファイルとは、自車100及び他車200の運動する速度を時刻の関数として表したものである。図10に速度プロファイルの例を示す。自車100については、行動の選択肢に基づいて、モデルパラメータとして指定した加速度aa0あるいは減速度ad0で加減速し、道路の制限速度を守りつつ、停止すべき位置で停止できるような速度変化を求めて、それを速度プロファイルとする。生成された速度プロファイルの例として、図11に示すような制減速度を持つ道路において、図中にあるパスに沿って運動した場合のものを図12に示す。
【0064】
図12に示すように、加速度としては、5秒間で0km/hから60km/hまで加速できる加速度を用いた。減速度としては、5秒間で60km/hから0km/hまで減速できる減速度を用いた。また、パス上の位置0mにおける速度である初速度は40km/hとした。他車200については、加速度は他車200の持つ値a1とし、道路の法定速度は考えずに運動するような速度プロファイルを生成して用いる。
【0065】
物体の運動は、速度プロファイルから完全に計算することができる。物体の時刻tにおける位置x(t)は、時刻t=0から時刻tまで速度プロファイルを積分すれば良い。つまり、時刻Tにおける速度をv(T)として、下式(4)として求められる。
【数4】
【0066】
時刻tにおける速度は、時刻tにおける速度プロファイルの値v(t)である。また、物体が位置Xに来る時刻は、下式(5)のようなtについての方程式を解けば良い。
【数5】
【0067】
この例のモデルでは、速度に負の値を許していないため、位置は時刻に対して単調に増加するため、下式(5)の方程式はかならず1つの解を持ち、簡単に解くことができる。
【0068】
以下、自車100がクロスポイントcpを通過し始めてから、通過し終わるまでの通過時間を算出する手法について説明する。通過時間は、自車100の先頭部分がクロスポイントcpに乗ってから、自車100の後尾部分がクロスポイントcpを通過するまでの時間である。図13に自車100のクロスポイントcp通過の様子を示す。自車100の先頭部分がクロスポイントcpに乗る時刻及び自車100の後尾部分がクロスポイントcpを通過するまでの時刻は、速度プロファイルから算出できる。
【0069】
以下、他車200の位置分布を算出する手法について説明する。ある時刻における他車200の位置分布を算出する。時刻t=0(現在時刻とする)において、他車200は、位置・速度空間に図14に示すように分布している。図14の分布を他車200の速度プロファイル(等加速度運動)に従って時間発展させると、速度が速いほど先に進み、図15に示すような分布となる。図15に示すように、時刻tにおける分布は時刻t=0における分布とは異なる形状に変化するが、等加速度運動(図15は加速度0の例)であり、加速度には誤差がないものとしていることから、任意の時刻で他車200の分布は必ず平行四辺形状となる。
【0070】
図15に示すような分布を速度について積分すると、時刻tにおける他車200の位置分布が得られる。つまり、時刻tにおける位置・速度空間における他車200の分布をPt(x,v)とすると、時刻tにおける他車の位置分布Qt(x)は、図16に示すような時刻tにおける分布を速度で積分した下式(6)で示される。
【数6】
【0071】
図16に示すような速度・位置空間における分布が平行四辺形状になることから、位置分布は図17に示すように必ず台形となる。この積分は、位置・速度空間における分布の幾何学的な性質から簡単に行うことができる。
【0072】
以下、他車200がクロスポイントcpにいる確率を通過時間にわたって積分し、リスク値を算出する手法について説明する。これは、自車100がクロスポイントcpに乗っている間に、他車200がクロスポイントcpに存在する確率を積分することに相当する。自車100のクロスポイントcpの通過時間を[t1,t2]とする。t1で自車100の先頭部分がクロスポイントcpに乗り、t2で自車100の後尾がクロスポイントcpを通過する。図18に、上記の通過時間にわたる他車200の位置分布の積分の概念図を示す。図中太線で示す通過時間[t1,t2]において存在確率が積分される。この積分は、数値積分法を用いて計算する。
【0073】
以下、本実施形態のリスク予測(S4)及び規範行動決定(S5)についてさらに詳述する。基本的な考え方として、本実施形態では、人間の運転行動のパターンを考えて、それと同様の選択肢を準備し、リスクが許容できる範囲であり、且つ移動効率の良い規範行動を選択する。図19に示すように、本実施形態では、短い時間の反射的なリスク回避(反射的判断)と並行して、長い時間の熟慮した上でのリスク回避(深読み判断)についてリスクを予測する。図19の例では、規範行動の決定基準を満たす解が例えば4秒以内の過去または未来にあると想定して、リスクを予測する。すなわち、本実施形態では、予測時間についてのマルチスケール化が図られる。
【0074】
図19に示すように、反射的判断においては、過去1秒の情報が活用される。図中に示されるように、例えば0.5秒ごとに自車100周辺の障害物を認知し、可視対象を検出する。例えば1秒先の未来までに限定した短期予測が行われ、短期リスクが算出される。ここで、短期リスクが閾値よりも大きい場合はルーチンR3に進み、短期の行動計画が設定され、車速等の短期行動の短期リスクの算出が再度行なわれる。
【0075】
一方、短期リスクが閾値よりも小さい場合は、ルーチンR1に進み、再度0.5秒ごとに短期リスクの算出が行なわれる。この場合、併せてルーチンR2が実行され、深読み判断が行われる。図中に示すように、2〜4秒先のリスク算出である2〜4秒リスク算出と2〜4秒間における行動計画である2〜4秒間行動計画の設定とが行われる。これらの2〜4秒間行動計画の中で、移動効率が最大であり、リスクが最小である行動計画が選択され、実行される。例えば、交差点中央手前で一時停止してから右折するか、一時停止しないで右折するかといった行動計画が選択される。ルーチンR3が実行されるときは、短期リスクが高いため、ルーチンR1及びルーチンR2は実行されない。選択された行動計画は、短期の行動計画と同様に、車速等の短期行動の短期リスクの算出が再度行なわれる。これらの行動計画は0.5秒ごとに随時更新され、常に最新の計画が採用される。
【0076】
以上のように、本実施形態では、1秒間の短期リスク算出及び2〜4秒間リスク算出は、複数の規範行動に対して並列で処理される。2〜4秒間行動計画については、移動効率が最大であり、リスクが最小である行動計画が選択されることにより、最適な行動計画が決定される。なお、上記の過去何秒間の情報を活用して、何秒先までのリスクを算出するかは、ドライバーの運転傾向から決定し、ドライバー個人に適した規範行動を決定しても良い。
【0077】
本実施形態では、基本的な考え方として自車100の行動目的ごとに自車100の複数の規範行動の選択肢が準備され、移動効率が最大であり、リスクが最小となるような基準で規範行動が選択される。この結果、規範車速等の規範行動が決定される。
【0078】
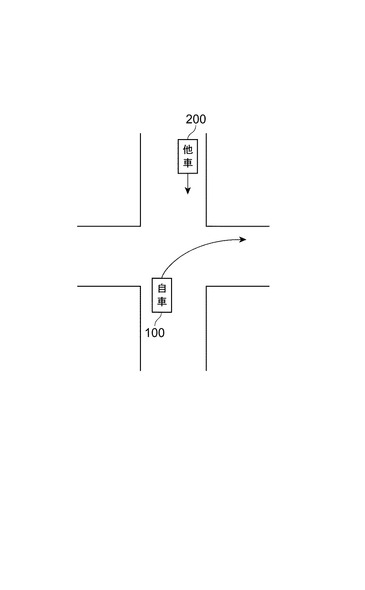
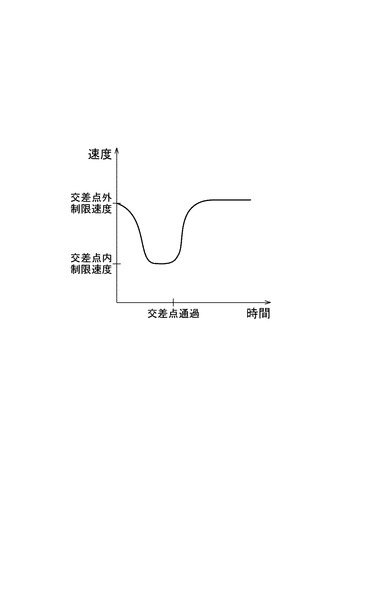
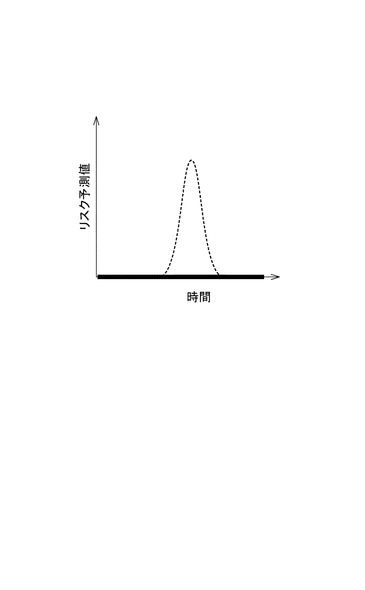
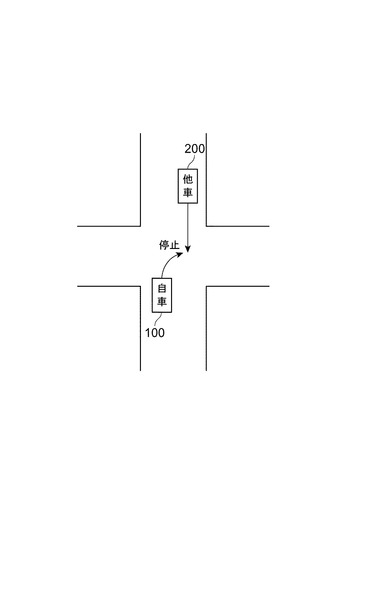
図20に示すように、対向車である他車200に対して自車100が右折する場合を想定する。図21に示すように、行動選択肢である規範行動1では一時停止をしないため、リスク予測値は、図22に示すように高く、移動効率は高いものとなる。一方、図23及び図24の規範行動2に示すように、自車100が右折中に一時停止をした場合、リスク予測値は、図25に示すように低いが、移動効率は低いものとなる。
【0079】
交差点右折行動の選択肢の大分類としては以下の4つが挙げられる。
(1)交差点前一時停止(信号、一時停止線などの規制により)
(2)交差点中央付近停止(対向車の存在により)
(3)右折先道路手前停止(右折先の歩行者の存在等により)
(4)停止せず右折
【0080】
上記の交差点右折行動の状況において、規範行動1は上記の(4)の分類に属し、規範行動2は上記の(2)の分類に属す。上記(1)〜(4)のような大分類の中には、行動の選択肢の変種が複数存在する。例えば、行動選択肢である規範行動1と異なる選択肢として、図26に示すように、行動選択肢1+αがある。このように本実施形態では、想定される行動選択肢の大分類の中で、リスクが低く且つ移動効率が最も高い行動を、行動選択肢の大分類の中及び大分類の間で選択的に決定する。例えば、図26においても、もし、行動選択肢1と行動選択肢1+αとの予測されるリスクが同じであるのならば、移動効率がより良いため、行動選択肢1が選択される。
【0081】
さらに、他車200については、例外的な場合以外は想定されたパスから大きくずれる場合は少ないが、図27に示すように、自転車260や歩行者280については、図中の実線に示す想定されるパスから、図中の破線に示すように大きくずれたパスを移動する可能性がある。このような破線に示すような行動については、ある単位時間ごとに過去の情報を使って予測することで求める。具体的には、簡単な運動の一次近似モデルまたは時系列解析における状態空間モデルなどで予測を行い、想定外のクロスポイントcp1,cp2についてもリスクを予測する。
【0082】
自車100と他車200等との接触可能性に関するリスク予測は、図28に示すように、さまざまなクロスポイントcp1〜cp(n)の到達時刻におけるリスク値をそれぞれ予測する。図中破線部で示される部分が、その時刻におけるCP(クロスポイント)ベクトルとなる。
【0083】
現時点のCPベクトルから図29に示すような各クロスポイントcp1等でのリスク値の和が算出され、リスク最小となる規範行動候補が選択される。例えば、図30〜32に示される規範行動候補1〜3では、リスク値Rが0となる規範行動候補2が選択される。ある一定のリスク許容値限界以下の規範候補があれば、目標地点までの移動効率によって規範運転が決定される。例えば、リスク許容値限界を0.4以下と設定すれば、図30〜32の中では、リスク値Rが0.3と0.4以下であり、移動効率が規範行動候補2よりも高い規範行動候補1が選択される。
【0084】
なお、上記の例では、過去、1期前(例えば、0.5秒前)の過去の車速等のデータから他車200等の位置及び速度を予測していたが、何秒かの過去のデータを用いても良い。例えば、何秒か過去のデータのデータ個数は以下のようになる。
(1)過去4秒間のデータを用いて車の位置及び速度を予測(データ個数8)
(2)過去3秒間のデータを用いて車の位置及び速度を予測(データ個数6)
(3)過去2秒間のデータを用いて車の位置及び速度を予測(データ個数4)
(4)過去1秒間のデータを用いて車の位置及び速度を予測(データ個数2)
(5)過去0.5秒間のデータを用いて車の位置及び速度を予測(データ個数1)
【0085】
過去のデータを観測することによって、他車200等及び自車100の行動予測精度の評価基準として、予測安定性が基準とされる。例えば、観測時間によって、予測結果が大きく変化する場合、過去の長い時間による予測結果は予測安定性が低く信頼性が低いため、過去1秒間等の短い時間の観測結果を使って予測が行われる。一方、観測時間によって予測結果が大きく変化しない場合は、予測安定性が高いため、過去1秒より長い時間の観測結果を使うことで、外乱に強い予測が行われる。
【0086】
本実施形態によれば、運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
【0087】
また、本実施形態によれば、運転支援装置10のECU20は、自車100周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測し、規範行動候補に係る運転行動により自車100が走行した場合における移動効率を取得するため、自車100周辺の障害物と自車100との接触のリスクと、移動効率とを考慮に入れた規範行動候補を提供することが可能となる。
【0088】
また、ECU20は、自車100周辺の障害物について取得した情報と、情報に対してより巨視的な関連する情報及び障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて障害物をマルチスケール認知により認知し、障害物と自車100との接触のリスクを予測する。このため、障害物について取得された障害物情報が限定的なものであったとしても、得られた情報の範囲から、より巨視的又はより微視的な情報を得ることができ、より有益な障害物の認知が可能となる。
【0089】
また、ECU20は、自車100及び障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路であるデフォルトパスPDEと、一般経路とは異なる経路であるアダプティプパスPADとを予測しつつ、障害物と自車100との接触のリスクを予測するため、複数の経路を考慮に入れてリスクを予測する精度を向上させることができる。
【0090】
また、ECU20は、障害物の予測される経路について、直接に認知可能な障害物の経路である顕在パスPOVと、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在パスPLAとを予測しつつ、障害物と自車100との接触のリスクを予測するため、潜在的な障害物についてのリスクも予測することが可能となり、予測されるリスクの信頼性を向上させることができる。
【0091】
また、ECU20は、自車100及び障害物の予測される経路上に自車100及び障害物が存在する確率の確率分布に基づいて、障害物と自車100との接触のリスクを予測するため、例えば道路全域にわたって自車100及び障害物が存在する確率を計算する手法に比べて、少ない計算量で障害物と自車100との接触のリスクを予測することが可能となる。
【0092】
特に、ECU20は、自車100及び障害物の予測される経路上の位置と速さとを座標軸とする空間内に自車100及び障害物が存在する確率の確率分布に基づいて、障害物と自車100との接触のリスクを予測するため、少ない計算量で障害物と自車100との接触のリスクを予測することが可能となる。
【0093】
さらに、ECU20は、規範行動候補に係る運転行動により自車100が走行した場合について、現在から所定時間経過時における障害物と自車100との接触のリスクである短期リスクと、所定時間より長い時間の経過後における障害物と自車との接触のリスクである長期的な2〜4秒間リスクとをそれぞれ予測するため、規範行動候補について短期的視点と長期的視点とから、障害物と自車100との接触のリスクをより多角的に予測することが可能となる。
【0094】
加えて、ECU20は、短期リスクのリスク値が所定の閾値よりも大きく、当該規範行動候補に係る運転行動のリスクが短期的に極めて高いときは、当該規範行動候補は妥当性が低く、以後の長期的なリスクの予測の必要性は低いため、長期的なリスクの予測を中止することにより、不必要な計算量を低減することが可能となる。
【0095】
尚、本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0096】
10…運転支援装置、11…車速センサ、12…レーダセンサ、13…カメラセンサ、14…ナビゲーションシステム、15…方向指示器センサ、16…操舵角センサ、17…路車間通信機、18…ドライバ認証部、20…ECU、31…アクチュエータ類、32…表示装置、100…自車、200…他車、250…潜在物体、260…自転車、280…歩行者。
【特許請求の範囲】
【請求項1】
自車周辺の状況に対する前記自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、前記規範行動候補に係る運転行動により前記自車が走行した場合における前記自車周辺の障害物と前記自車との接触のリスクを予測するリスク予測手段を備えた運転支援装置。
【請求項2】
自車周辺の状況に対する前記自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、前記規範行動候補に係る運転行動により前記自車が走行した場合における前記自車周辺の障害物と前記自車との接触のリスクを予測するリスク予測手段と、
前記規範行動候補に係る運転行動により前記自車が走行した場合における移動効率を取得する移動効率取得手段と、
を備えた運転支援装置。
【請求項3】
前記リスク予測手段は、前記自車周辺の前記障害物について取得した障害物情報と、前記障害物情報に対してより巨視的な関連する情報及び前記障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて前記障害物を認知し、前記障害物と前記自車との接触のリスクを予測する、請求項1又は2に記載の運転支援装置。
【請求項4】
前記リスク予測手段は、前記自車及び前記障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路である通常経路と、前記一般経路とは異なる経路である変則経路とを予測しつつ、前記障害物と前記自車との接触のリスクを予測する、請求項1〜3のいずれか1項に記載の運転支援装置。
【請求項5】
前記リスク予測手段は、前記障害物の予測される経路について、直接に認知可能な障害物の経路である顕在的経路と、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在的経路とを予測しつつ、前記障害物と前記自車との接触のリスクを予測する、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項6】
前記リスク予測手段は、前記自車及び前記障害物の予測される経路上に前記自車及び前記障害物が存在する確率の確率分布に基づいて、前記障害物と前記自車との接触のリスクを予測する、請求項1〜5のいずれか1項に記載の運転支援装置。
【請求項7】
前記リスク予測手段は、前記自車及び前記障害物の予測される経路上の位置と速さとを座標軸とする空間内に前記自車及び前記障害物が存在する確率の確率分布に基づいて、前記障害物と前記自車との接触のリスクを予測する、請求項6に記載の運転支援装置。
【請求項8】
前記リスク予測手段は、前記規範行動候補に係る運転行動により前記自車が走行した場合について、現在から所定時間経過時における前記障害物と前記自車との接触のリスクである短期的リスクと、前記所定時間より長い時間の経過後における前記障害物と前記自車との接触のリスクである長期的リスクとをそれぞれ予測する、請求項1〜7のいずれか1項に記載の運転支援装置。
【請求項9】
前記リスク予測手段は、前記短期的リスクが所定の閾値よりも大きいときは、当該規範行動候補に係る運転行動により前記自車が走行した場合についての前記長期的リスクの予測を中止する請求項8に記載の運転支援装置。
【請求項1】
自車周辺の状況に対する前記自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、前記規範行動候補に係る運転行動により前記自車が走行した場合における前記自車周辺の障害物と前記自車との接触のリスクを予測するリスク予測手段を備えた運転支援装置。
【請求項2】
自車周辺の状況に対する前記自車の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、前記規範行動候補に係る運転行動により前記自車が走行した場合における前記自車周辺の障害物と前記自車との接触のリスクを予測するリスク予測手段と、
前記規範行動候補に係る運転行動により前記自車が走行した場合における移動効率を取得する移動効率取得手段と、
を備えた運転支援装置。
【請求項3】
前記リスク予測手段は、前記自車周辺の前記障害物について取得した障害物情報と、前記障害物情報に対してより巨視的な関連する情報及び前記障害物情報に対してより微視的な関連する情報のいずれかが階層的に格納されたデータベースとから取得した情報とに基づいて前記障害物を認知し、前記障害物と前記自車との接触のリスクを予測する、請求項1又は2に記載の運転支援装置。
【請求項4】
前記リスク予測手段は、前記自車及び前記障害物のいずれかの予測される目的地を同じくする経路について、最も一般的な経路である通常経路と、前記一般経路とは異なる経路である変則経路とを予測しつつ、前記障害物と前記自車との接触のリスクを予測する、請求項1〜3のいずれか1項に記載の運転支援装置。
【請求項5】
前記リスク予測手段は、前記障害物の予測される経路について、直接に認知可能な障害物の経路である顕在的経路と、直接に認知不可能ではあるが存在が予想される障害物の経路である潜在的経路とを予測しつつ、前記障害物と前記自車との接触のリスクを予測する、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項6】
前記リスク予測手段は、前記自車及び前記障害物の予測される経路上に前記自車及び前記障害物が存在する確率の確率分布に基づいて、前記障害物と前記自車との接触のリスクを予測する、請求項1〜5のいずれか1項に記載の運転支援装置。
【請求項7】
前記リスク予測手段は、前記自車及び前記障害物の予測される経路上の位置と速さとを座標軸とする空間内に前記自車及び前記障害物が存在する確率の確率分布に基づいて、前記障害物と前記自車との接触のリスクを予測する、請求項6に記載の運転支援装置。
【請求項8】
前記リスク予測手段は、前記規範行動候補に係る運転行動により前記自車が走行した場合について、現在から所定時間経過時における前記障害物と前記自車との接触のリスクである短期的リスクと、前記所定時間より長い時間の経過後における前記障害物と前記自車との接触のリスクである長期的リスクとをそれぞれ予測する、請求項1〜7のいずれか1項に記載の運転支援装置。
【請求項9】
前記リスク予測手段は、前記短期的リスクが所定の閾値よりも大きいときは、当該規範行動候補に係る運転行動により前記自車が走行した場合についての前記長期的リスクの予測を中止する請求項8に記載の運転支援装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【公開番号】特開2011−96105(P2011−96105A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−250976(P2009−250976)
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]