
運転支援装置
【課題】車両運転の安全性向上を図りつつ、運転者の運転技量の向上を促すことのできる運転支援装置を提供する。
【解決手段】本発明は、運転者による車両の運転操作を支援する運転支援装置1であって、車両の走行状況を検出する走行状況検出部13と、走行状況検出部13の検出した走行状況に基づいて、車両の操作許容範囲を算出する操作許容範囲算出部16と、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断部17と、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する車両制御部18と、を備える。
【解決手段】本発明は、運転者による車両の運転操作を支援する運転支援装置1であって、車両の走行状況を検出する走行状況検出部13と、走行状況検出部13の検出した走行状況に基づいて、車両の操作許容範囲を算出する操作許容範囲算出部16と、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断部17と、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する車両制御部18と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者による車両の運転操作を支援する運転支援装置に関する。
【背景技術】
【0002】
従来、運転支援装置として、例えば特開2005−250564号公報に記載のものが知られている。この公報に記載の運転支援装置は、地図データの走行経路に対応した安全運転の基準となる運転操作の基準データを記憶している。そして、この運転支援装置では、基準データに基づいて運転者の運転操作が安全運転の範囲から逸脱したか否かを判定し、運転者の運転操作が安全運転の範囲から逸脱した場合に車両を手動運転モードから自動運転モードに切り換える。自動運転モードでは、基準データに基づいた最適な運転操作が自動で行われる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−250564号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述した従来の運転支援装置においては、運転者の運転操作が安全運転の範囲から逸脱すると自動運転モードに切り替わってしまうため、運転者の運転操作が反映されず、運転者は運転技量が不足していることを体験できない。このため、従来の運転支援装置においては、運転者の技量向上につながらないという問題があった。
【0005】
そこで、本発明は、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことのできる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明は、運転者による車両の運転操作を支援する運転支援装置であって、車両の走行状況を検出する走行状況検出手段と、走行状況検出手段の検出した走行状況に基づいて、車両の操作許容範囲を算出する操作許容範囲算出手段と、運転者の運転操作量が操作許容範囲から逸脱した逸脱操作量であるか否かを判断する逸脱判断手段と、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断した場合、操作許容範囲内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する車両制御手段と、を備えることを特徴とする。
【0007】
本発明に係る運転支援装置によれば、運転者の運転操作量が操作許容範囲から逸脱した場合に運転操作量ではなく範囲限界操作量に基づいて車両を制御するので、不適切な運転操作が車両制御に反映されることを避けることができ、車両運転の安全性向上が図られる。しかも、この運転支援装置によれば、運転操作量が操作許容範囲から逸脱した場合、従来のように基準となる操作量で自動運転されるのではなく、操作許容範囲内で逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両が制御されるので、運転操作の結果が運転者にフィードバックされ、運転者に運転技量の低さを認識させることができる。従って、この運転支援装置によれば、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことができる。
【0008】
本発明に係る運転支援装置においては、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、車両制御装置は、操作量比算出手段が操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量であると判断したときには、範囲限界操作量を操作量比に応じて制限した操作量に基づいて車両を制御することが好ましい。
【0009】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されて車両制御が行われた場合、その後の範囲限界操作量の出力について操作量比に応じた制限を加えることで、運転者はどれだけ逸脱したのかを認識することができる。従って、この運転支援装置によれば、運転者は自分の運転技量をより正確に認識することができるので、効果的に運転者の技量向上を促すことができる。
【0010】
本発明に係る運転支援装置においては、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、車両制御装置は、操作量比算出手段が操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量ではないと判断したときに、当該運転操作量を操作量比に応じて制限した制限操作量に基づいて車両を制御することが好ましい。
【0011】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されて車両制御が行われた場合、その後の運転操作量の出力について操作量比に応じた制限を加えることで、運転者はどれだけ逸脱したのかを認識することができる。従って、この運転支援装置によれば、運転者は自分の運転技量をより正確に認識することができるので、効果的に運転者の技量向上を促すことができる。
【0012】
本発明に係る運転支援装置においては、操作量比算出手段が操作量比を算出した場合、車両の運転時間及び車両のエンジンの始動回数の少なくとも一方と操作量比とに基づいて、操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、車両制御装置は、修正操作量比算出手段が修正操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量であると判断したときには、範囲限界操作量を修正操作量比に応じて制限した操作量に基づいて車両を制御することが好ましい。
【0013】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されたとしても、その後の運転経験の蓄積によって技量向上が見込まれることから、範囲限界操作量の出力に対する制限を車両の運転時間やエンジンの始動回数に応じて緩和していくことで、運転者に自らの技量向上を認識させることができる。従って、この運転支援装置によれば、運転者に自らの技量向上を認識させることで、運転の技量向上を促すことができる。
【0014】
また、本発明に係る運転支援装置においては、操作量比算出手段が操作量比を算出した場合、車両の運転時間及び車両のエンジンの始動回数の少なくとも一方と操作量比とに基づいて、操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、車両制御装置は、修正操作量比算出手段が修正操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量ではないと判断したときに、当該運転操作量を修正操作量比に応じて制限した制限操作量に基づいて車両を制御することが好ましい。
【0015】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されたとしても、その後の運転経験の蓄積によって技量向上が見込まれることから、運転操作量の出力に対する制限を車両の運転時間やエンジンの始動回数に応じて緩和していくことで、運転者に自らの技量向上を認識させることができる。従って、この運転支援装置によれば、運転者に自らの技量向上を認識させることで、運転の技量向上を促すことができる。
【0016】
本発明に係る運転支援装置においては、走行状況検出手段の検出した走行状況に基づいて、車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段と、車線逸脱走行パターン算出手段の算出した車線逸脱走行パターンと運転者の運転操作量とに基づいて、車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断手段と、を更に備え、車両制御装置は、車線逸脱走行判断手段が車両は車線逸脱走行を行うと判断した場合、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断したときであっても、運転者の運転操作量に基づいて車両を制御することが好ましい。
【0017】
本発明に係る運転支援装置では、カーブにおけるアウトインアウト走行や車両追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合にまで、運転操作量を車線内の操作許容範囲に制限することは適切ではないことから、車両が車線逸脱走行を行うと判断された場合には運転者の運転操作量に基づいた車両制御を行う。従って、この運転支援装置によれば、車両運転の安全向上を図りつつも、運転者による意図的な車線逸脱走行を可能にすることができる。
【0018】
本発明に係る運転支援装置においては、走行状況検出手段の検出した走行状況に基づいて、車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段を更に備え、操作許容範囲算出手段は、車両が車線内を走行する場合の操作許容範囲と車両が車線逸脱走行パターンに沿って走行する場合の操作許容範囲とを算出することが好ましい。
【0019】
本発明に係る運転支援装置では、車両が取り得る車線逸脱走行パターンを含めた操作許容範囲を算出するので、運転者は操作許容範囲内で意図的な車線逸脱走行を行うことができる。しかも、車線逸脱走行中に運転を誤った場合には、操作許容範囲から逸脱したと判断されて車両が制御されるので、車線逸脱走行中においても安全性の向上を図ることができる。
【発明の効果】
【0020】
本発明によれば、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことができる。
【図面の簡単な説明】
【0021】
【図1】第1の実施形態に係る運転支援装置を示すブロック図である。
【図2】第1の実施形態に係る運転支援装置を示す機能構成図である。
【図3】第1の実施形態に係る運転支援装置による運転支援を説明するための図である。
【図4】第1の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図5】第2の実施形態に係る運転支援装置を示すブロック図である。
【図6】第2の実施形態に係る運転支援装置を示す機能構成図である。
【図7】第2の実施形態に係る運転支援装置による運転支援を説明するための図である。
【図8】第2の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図9】第3の実施形態に係る運転支援装置を示すブロック図である。
【図10】第3の実施形態に係る運転支援装置を示す機能構成図である。
【図11】第3の実施形態に係る運転支援装置による運転支援を説明するための図である。
【図12】第3の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図13】第4の実施形態に係る運転支援装置を示すブロック図である。
【図14】第4の実施形態に係る運転支援装置を示す機能構成図である。
【図15】車両がアウトインアウト走行を行う状況を示すための概略平面図である。
【図16】第4の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図17】第5の実施形態に係る運転支援装置を示すブロック図である。
【図18】第5の実施形態に係る運転支援装置を示す機能構成図である。
【図19】第5の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図20】第6の実施形態に係る運転支援装置を示すブロック図である。
【図21】第6の実施形態に係る運転支援装置を示す機能構成図である。
【図22】車両がアウトインアウト走行を行う状況を示すための概略平面図である。
【図23】第6の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の好適な実施形態について、図面を参照して詳細に説明する。なお、各図において同一又は相当部分には同一符号を付し、重複する説明を省略する。
【0023】
[第1の実施形態]
図1〜図3に示されるように、第1の実施形態に係る運転支援装置1は、運転者が不適切な運転操作を行った場合に車両制御に介入することで、運転者による車両の運転を支援するものである。運転支援装置1は、運転者の運転操作量Dが操作許容範囲Aから逸脱した場合に、運転者が不適切な運転操作を行ったと判断する。操作許容範囲Aは、車両の安全性確保や交通ルール遵守などの観点から運転者の自在な運転操作が許容される範囲である。
【0024】
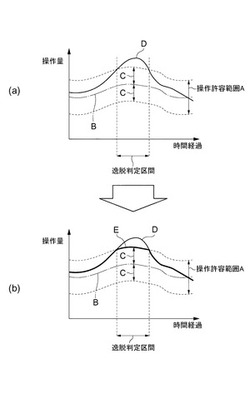
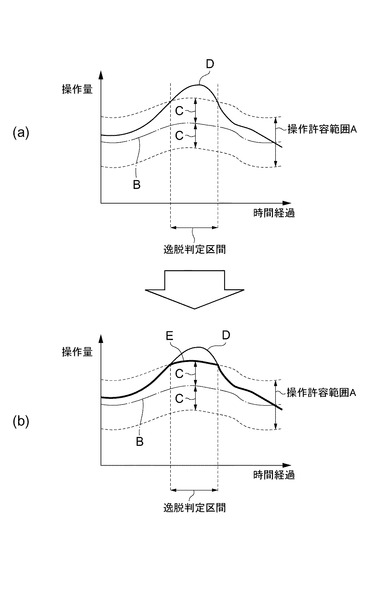
ここで、図3(a)は、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合を示すグラフである。縦軸は操作量、横軸は時間経過を示している。図3(a)に示されるように、運転操作量Dの一部は、操作許容範囲Aを逸脱している。この逸脱した運転操作量Dを逸脱操作量、逸脱した区間を逸脱判断区間とする。
【0025】
操作許容範囲Aは、規範操作量B及び操作許容量Cを用いて表される。規範操作量Bとは、走行車線や交通規則に対応した規範となる操作量である。例えば、規範操作量Bは、走行車線の中央を車両が走行するための規範となる操作量として算出される。操作許容量Cとは、規範操作量Bから外れても許容できる範囲の操作量である。例えば、操作許容量Cは、走行車線から車両が逸脱しない範囲の操作量として算出される。操作許容範囲Aは、数値的に、規範操作量Bに操作許容量Cを加えた操作量と規範操作量Bから操作許容量Cを除いた操作量との間の範囲として表される。なお、操作許容範囲Aの算出について、規範操作量Bに加算する操作許容量Cと規範操作量Bから減算する操作許容量Cとは同じ量とは限らない。
【0026】
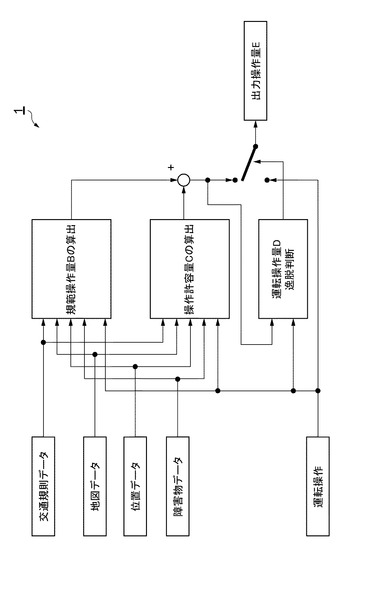
図3(b)は、図3(a)の場合に車両に出力される出力操作量Eを示すグラフである。出力操作量Eとは、車両に出力されて実際の車両制御に反映される操作量である。図3(b)において出力操作量Eを太線で示す。
【0027】
図3(b)に示されるように、運転支援装置1では、運転操作量Dが操作許容範囲Aから逸脱しない区間においては運転操作量Dを出力操作量Eとして車両に出力する。また、運転支援装置1では、運転操作量Dが操作許容範囲Aから逸脱した逸脱判断区間においては操作許容範囲A内で運転操作量Dに最も近い操作量である範囲限界操作量を出力操作量Eとして車両に出力する。
【0028】
このように、運転支援装置1では、運転者の運転操作量Dが操作許容範囲Aから逸脱している場合に、逸脱判断区間内の運転操作量Dを範囲限定操作量に置き換えて車両に出力することで、不適切な運転操作が車両制御に反映されることを避けることができ、車両運転の安全性向上が図られる。
【0029】
次に、第1の実施形態に係る運転支援装置1の構成について説明する。
【0030】
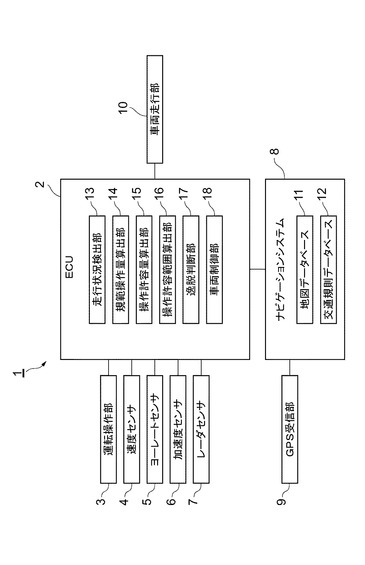
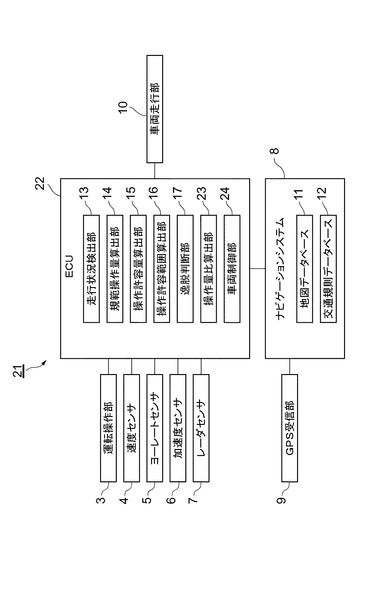
図1に示されるように、運転支援装置1は、装置を統括適に制御するECU[Electronic Control Unit]2を備えている。ECU2は、CPU[Central Processing Unit]、ROM[Read Only Memory]、RAM[Random Access Memory]などからなる電子制御ユニットである。ECU2では、ROMに記憶されているアプリケーションプログラムをRAMにロードし、CPUで実行することで、操作許容範囲Aの算出などの各種演算処理を行う。
【0031】
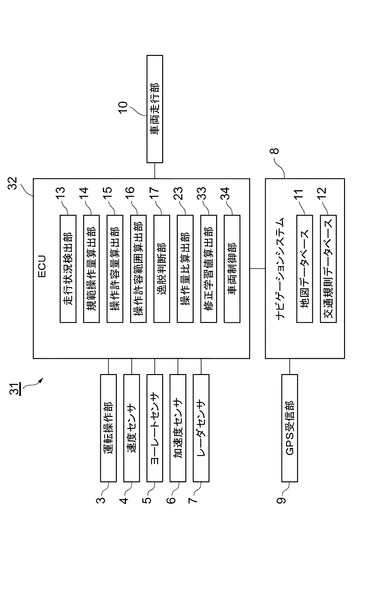
ECU2は、運転操作部3、速度センサ4、ヨーレートセンサ5、加速度センサ6、レーダセンサ7、ナビゲーションシステム8、及び車両走行部10と接続されている。運転操作部3は、運転者が車両に運転操作を入力するためのものである。運転操作部3は、ハンドルやアクセルペダル、ブレーキペダルなどから構成されている。運転操作部3は、運転者から入力された運転操作をECU2に出力する。
【0032】
速度センサ4は、車両の速度を検出するセンサであり、ヨーレートセンサ5は車両のヨーレートを検出するセンサである。また、加速度センサ6は車両の加速度を検出するセンサである。速度センサ4は速度センサ4、ヨーレートセンサ5、及び加速度センサ6は、それぞれ検出結果をECU2に出力する。レーダセンサ7は、他車両や歩行者などの障害物を検出するセンサである。レーダセンサ7は、車両周囲に存在する障害物を検出した場合、検出結果をECU2に出力する。
【0033】
ナビゲーションシステム8は、車両の運転者に経路案内を行うシステムである。ナビゲーションシステム8には、車両の位置を検出するためのGPS[Global Positioning System]受信部9が接続されている。GPS受信部9は、複数のGPS衛星からの信号を受信することで車両の位置を検出する。また、ナビゲーションシステム8は、道路地図データを記憶した地図データベース11と、交通規則データを記憶した交通規則データベース12と、を備えている。ナビゲーションシステム8は、GPS受信部9による車両の位置データ、地図データベース11の道路地図データ、及び交通規則データベース12の交通規則データを利用して運転者に目的地までの経路案内を行う。ナビゲーションシステム8は、車両の位置データ、道路地図データ、及び交通規則データをECU2に出力する。
【0034】
車両走行部10は、車両の走行制御を実行するものである。車両走行部10は、車両のエンジン制御部、ステアリングアクチュエータ、ブレーキアクチュエータ、及びシフトアクチュエータなどから構成されている。車両走行部10は、ECU2の出力信号に応じて車両の走行制御を行う。
【0035】
ECU2は、走行状況検出部13、規範操作量算出部14、操作許容量算出部15、操作許容範囲算出部16、逸脱判断部17、及び車両制御部18を有している。
【0036】
走行状況検出部13は、各種のセンサ4〜7及びナビゲーションシステム8からの出力に基づいて、車両の走行状況を検出する。車両の走行状況には、車両の走行する道路形状、交通規則、車両の速度や姿勢、車両周囲の障害物など車両の走行に関わるあらゆる状況が含まれる。また、走行状況検出部13は、検出した走行状況及び運転操作部3からの出力に基づいて車両の将来進路を算出する。
【0037】
規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて、車線形状や交通規則に対応した規範となる操作量である規範操作量Bを算出する。操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて、規範操作量Bから外れても許容できる範囲の操作量である操作許容量Cを算出する。操作許容量算出部15は、車両が車線から逸脱しない、歩行者などの障害物に接触しない、一時停止などの交通規則を逸脱しないなどの条件を満たすように操作許容量Cを算出する。
【0038】
操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて、操作許容範囲Aを算出する。逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する。
【0039】
車両制御部18は、逸脱判断部17が逸脱操作量であると判断した場合、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する。範囲限界操作量は、規範操作量Bに操作許容量Cを加えた操作量又は規範操作量Bから操作許容量Cを除いた操作量に相当する。車両制御部18は、逸脱判断部17が逸脱操作量であると判断した場合、範囲限界操作量を出力操作量Eとして車両走行部10に出力することで車両の走行を制御する。一方、車両制御部18は、逸脱判断部17が逸脱操作量ではないと判断した場合、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0040】
続いて、第1の実施形態に係る運転支援装置1の動作について説明する。
【0041】
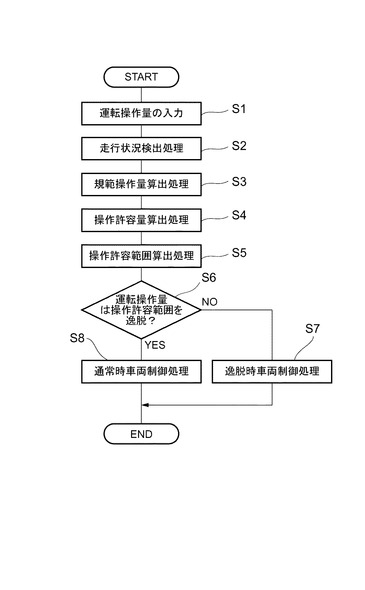
図4に示されるように、第1の実施形態に係る運転支援装置1では、まず運転者による運転操作量Dの入力が行われる(S1)。運転者は、運転操作部3を操作することで車両に対する運転操作の入力を行う。その後、走行状況検出部13は、各種のセンサ4〜7及びナビゲーションシステム8の出力に基づいて車両の走行状況を検出する走行状況検出処理を行う(S2)。また走行状況検出処理において、走行状況検出部13は、車両の走行状況と運転操作部3から出力された運転者の運転操作量Dとに基づいて車両の将来進路を算出する。
【0042】
次に、規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて規範操作量Bを算出する規範操作量算出処理を行う(S3)。その後、操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて操作許容量Cを算出する操作許容量算出処理を行う(S4)。
【0043】
続いて、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S5)。その後、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S6)。
【0044】
逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、車両制御部18は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する逸脱時車両制御処理を行う(S7)。この逸脱時車両制御処理では、範囲限界操作量が出力操作量Eとして車両走行部10に出力される。
【0045】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部18は、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S8)。この通常時車両制御処理では、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0046】
以上説明した運転支援装置1によれば、運転者の運転操作量Dが操作許容範囲Aから逸脱した場合に運転操作量Dではなく範囲限界操作量に基づいて車両を制御することで、不適切な運転操作が車両制御に反映されることを避けることができるので、車両運転の安全性向上を図られる。しかも、この運転支援装置1によれば、運転操作量Dが操作許容範囲Aから逸脱した場合、従来のように基準となる操作量で自動運転されるのではなく、操作許容範囲A内で逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両が制御されるので、運転操作の結果が運転者にフィードバックされ、運転者に運転技量の低さを認識させることができる。従って、この運転支援装置1によれば、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことができる。
【0047】
[第2の実施形態]
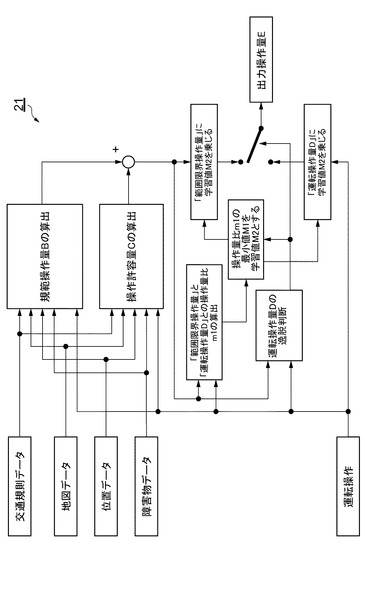
図5及び図6に示されるように、第2の実施形態に係る運転支援装置21は、第1の実施形態に係る運転支援装置1と比べて、運転者の運転操作量Dが操作許容範囲Aから逸脱した場合に運転操作量Dの逸脱程度に応じて、以降の操作量の出力を制限する点が主に異なる。
【0048】
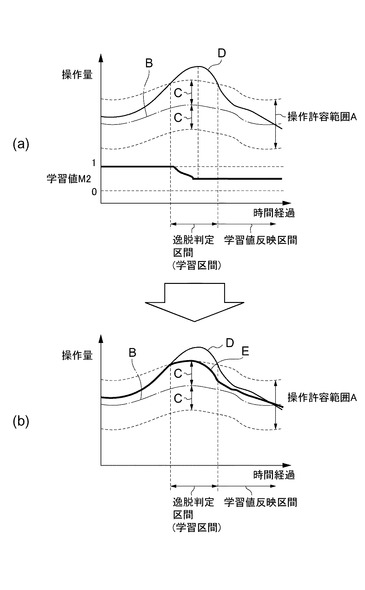
具体的には、運転支援装置21は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断した場合、当該逸脱操作量と操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量との比である操作量比m1を算出する。この操作量比は1以下の値として算出される。すなわち、逸脱操作量及び範囲限界操作量のうち量の大きい方を1とした場合の小さい方の比率が操作量比m1として算出される。操作量比m1は、運転操作量Dの逸脱の程度が大きいほど小さな値が算出される。
【0049】
また、運転支援装置21は、算出した操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。運転支援装置21は、最小値M1を学習値M2として設定する。学習値M2は、操作量の出力の制限に用いられる値である。なお、学習値M2は、最小値M1と同じ値のものに限られず、最小値M1に応じた異なる値を学習値M2として算出する態様であっても良い。このように、運転支援装置21では、記憶した操作量比m1の最小値M1を学習値M2とすることで、毎回算出した操作量比m1を操作量の出力の制限に用いる場合と比べて、演算処理量の低減を図ることができる。
【0050】
ここで、図7(a)は、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合を示すグラフである。縦軸は操作量、横軸は時間経過を示している。また、図7(b)は、第2の実施形態の運転支援装置21における出力操作量Eを示すグラフである。図7(a)及び図7(b)に示されるように、運転支援装置21では、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断されると、以降の範囲限界操作量及び運転操作量Dの出力について学習値M2に応じた制限が加えられる。具体的には、範囲限界操作量又は運転操作量Dに学習値M2を乗じた操作量が出力操作量Eとして車両に出力される。学習値M2に応じた制限が加えられる区間を学習値反映区間として示す。
【0051】
以下、第2の実施形態に係る運転支援装置21の構成について説明する。前述した実施形態と重複する部分については説明を省略する。
【0052】
運転支援装置21のECU22は、操作量比算出部23を有している。操作量比算出部23は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断した場合、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する。また、操作量比算出部23は、操作量比m1のうち最も小さい値を最小値M1として記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を学習値M2として設定する。
【0053】
車両制御部24は、操作量比算出部23が学習値M2を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断したときには、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に学習値M2を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部24は、学習値M2に応じて範囲限界操作量を制限した操作量に基づいて車両を制御する。
【0054】
また、車両制御部24は、操作量比算出部23が学習値M2を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断したときには、運転者の運転操作量Dに学習値M2を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部24は、学習値M2に応じて運転者の運転操作量Dを制限した操作量に基づいて車両を制御する。
【0055】
続いて、第2の実施形態に係る運転支援装置21の動作について説明する。
【0056】
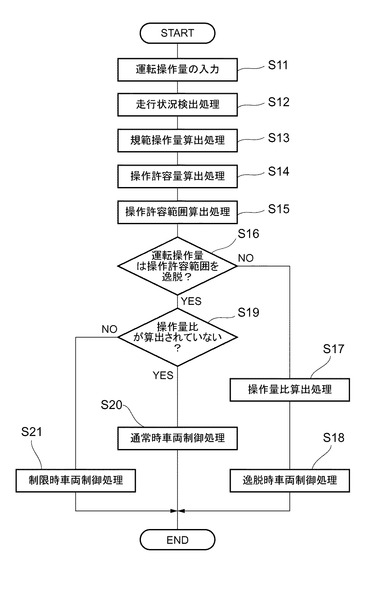
図8に示されるように、第2の実施形態に係る運転支援装置21では、まず運転者による運転操作量Dの入力が行われる(S11)。運転者は、運転操作部3を操作することで車両に対する運転操作の入力を行う。その後、走行状況検出部13は、運転操作部3、各種のセンサ4〜7、及びナビゲーションシステム8に基づいて、車両の走行状況の検出及び車両の将来進路の算出を行う走行状況検出処理を行う(S12)。
【0057】
次に、規範操作量算出部14が車両の走行状況の検出及び車両の将来進路に基づいて規範操作量Bを算出する規範操作量算出処理が行われる(S13)。続いて、操作許容量算出部15は、車両の走行状況の検出及び車両の将来進路に基づいて操作許容量Cを算出する操作許容量算出処理が行われる(S14)。
【0058】
その後、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S15)。次に、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S16)。
【0059】
逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する(S17)。また、操作量比算出部23は、操作量比m1のうち最も小さい値を最小値M1として記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を学習値M2として設定する。
【0060】
その後、車両制御部24は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量を算出すると共に、当該範囲限界操作量に学習値M2を乗じた操作量に基づいて車両を制御する逸脱時車両制御処理を行う(S18)。この逸脱時車両制御処理では、範囲限界操作量に学習値M2を乗じた操作量が出力操作量Eとして車両走行部10に出力される。
【0061】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部24は、操作量比算出部23が操作量比m1を算出したか否かを判断する操作量比算出判断処理を行う(S19)。車両制御部24は、操作量比算出部23が操作量比m1を算出していないと判断した場合、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S20)。
【0062】
車両制御部24は、操作量比算出部23が操作量比m1を算出したと判断した場合、運転者の運転操作量Dに学習値M2を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S21)。この制限時車両制御処理では、運転者の運転操作量Dに学習値M2を乗じた操作量が出力操作量Eとして車両走行部10に出力される。
【0063】
以上説明した運転支援装置21によれば、運転者の運転操作量Dが逸脱操作量であると判断されて車両制御が行われた場合、その後の範囲限界操作量及び運転操作量Dの出力について操作量比m1に応じた制限を加えることで、運転者はどれだけ逸脱したのかを認識することができる。従って、この運転支援装置21によれば、運転者は自分の運転技量をより正確に認識することができるので、効果的に運転者の技量向上を促すことができる。なお、範囲限界操作量及び運転操作量Dのいずれか一方にのみ制限を加える態様であっても良い。
【0064】
[第3の実施形態]
図9及び図10に示されるように、第3の実施形態に係る運転支援装置31は、第2の実施形態に係る運転支援装置21と比べて、範囲限界操作量及び運転操作量Dの出力に加える制限を運転時間の経過等に応じて小さくする点が主に異なる。
【0065】
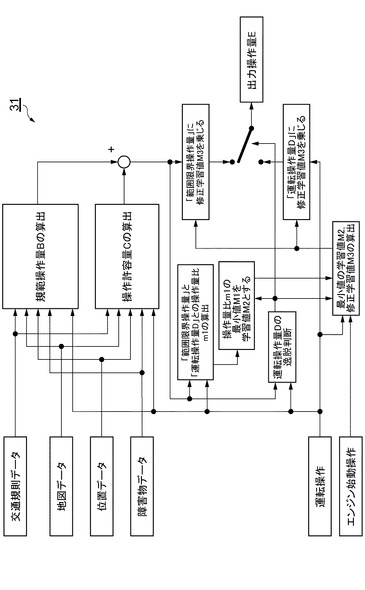
具体的には、運転支援装置31は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断した場合、当該逸脱操作量と操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量との比である操作量比m1を算出する。運転支援装置31は、算出した操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。運転支援装置31は、最小値M1を学習値M2として設定する。
【0066】
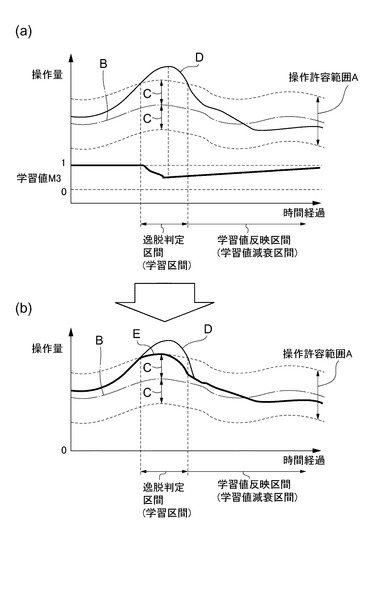
更に、運転支援装置31は、学習値M2の設定後の運転時間に基づいて、学習値M2を増加するように修正した修正学習値M3を算出する。修正学習値M3は、特許請求の範囲に記載の修正操作量比に相当する。この修正学習値M3は、学習値M2の設定後の運転時間が0の場合、すなわち学習値M2の設定直後は学習値M2と等しい値をとる。
【0067】
ここで、図11(a)は、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合を示すグラフである。縦軸は操作量、横軸は時間経過を示している。また、図11(b)は、第3の実施形態の運転支援装置31における出力操作量Eを示すグラフである。図11(a)及び図11(b)に示されるように、運転支援装置31では、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断されると、その後の範囲限界操作量及び運転操作量Dの出力について修正学習値M3に応じた制限が加えられる。具体的には、範囲限界操作量又は運転操作量Dに修正学習値M3を乗じた操作量が出力操作量Eとして車両に出力される。
【0068】
この運転支援装置31では、修正学習値M3が学習値M2の設定後の運転時間及びエンジン始動回数に応じて1に近づくように増加する。すなわち、運転時間の経過及びエンジン停止後の始動操作の回数に伴って運転者の運転操作量Dや範囲限界操作量の出力の制限が緩和され、元の操作量が出力されるようになる。修正学習値M3は、学習値M2と運転時間との比に基づいて増加するように算出される。また、運転支援装置31では、運転者の運転操作量Dが再び操作許容範囲Aから逸脱した場合には、新たな修正学習値M3が再び算出される。
【0069】
以下、第3の実施形態に係る運転支援装置31の構成について説明する。
【0070】
運転支援装置31のECU32は、修正学習値算出部33を有している。修正学習値算出部33は、操作量比算出部23が学習値M2を設定した場合、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する。修正学習値算出部33は、逸脱判断部17が運転者の運転操作量Dが再び操作許容範囲Aから逸脱したと判断した場合には、新たな学習値M2の値に合わせて修正学習値M3を再び算出する。この修正学習値算出部33は、特許請求の範囲に記載の修正操作量比算出手段に相当する。
【0071】
車両制御部34は、修正学習値算出部33が修正学習値M3を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断したときには、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部34は、修正学習値M3に応じて範囲限界操作量を制限した操作量に基づいて車両を制御する。
【0072】
また、車両制御部34は、修正学習値算出部33が修正学習値M3を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断したときには、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部34は、修正学習値M3に応じて運転者の運転操作量Dを制限した操作量に基づいて車両を制御する。なお、修正学習値M3が1である場合には運転操作量Dの値がそのまま車両制御
【0073】
続いて、第3の実施形態に係る運転支援装置31の動作について説明する。
【0074】
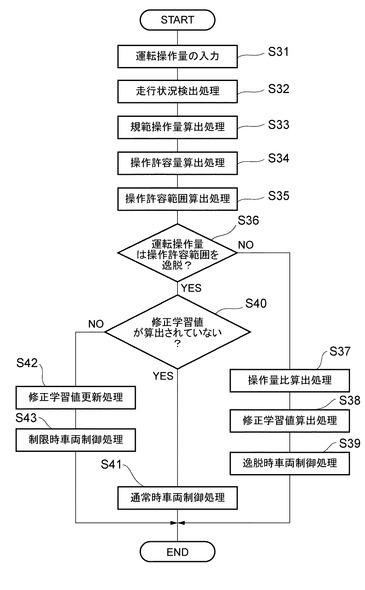
図8に示されるように、第3の実施形態に係る運転支援装置31では、まず運転者による運転操作量Dの入力が行われる(S31)。その後、走行状況検出部13は、運転操作部3、各種のセンサ4〜7、及びナビゲーションシステム8に基づいて、車両の走行状況の検出及び車両の将来進路の算出を行う走行状況検出処理を行う(S32)。
【0075】
次に、規範操作量算出部14が車両の走行状況の検出及び車両の将来進路に基づいて規範操作量Bを算出する規範操作量算出処理が行われる(S33)。続いて、操作許容量算出部15は、車両の走行状況の検出及び車両の将来進路に基づいて、操作許容量Cを算出する操作許容量算出処理が行われる(S34)。
【0076】
その後、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S35)。次に、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S36)。
【0077】
逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する操作量比算出場処理を行う(S37)。操作量比算出場処理において、操作量比算出部23は、操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。また、操作量比算出部23は、最小値M1を運転操作量Dの制限に用いる学習値M2として設定する。
【0078】
修正学習値算出部33は、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する修正学習値算出処理を行う(S38)。その後、車両制御部34は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する逸脱時出力制御処理を行う(S39)。すなわち、車両制御部34は、修正学習値M3に応じて範囲限界操作量を制限した操作量に基づいて車両を制御する。
【0079】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部34は、修正学習値算出部33が修正学習値M3を算出したか否かを判断する修正操作量比算出判断処理を行う(S40)。車両制御部34は、修正学習値算出部33が修正学習値M3を算出していないと判断した場合、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S41)。
【0080】
車両制御部34が修正学習値算出部33は修正学習値M3を算出したと判断した場合、修正学習値算出部33は、記憶されている学習値M2と学習値M2の設定後の運転時間とに基づいて修正学習値M3を更新する修正学習値更新処理を行う(S42)。その後、車両制御部34は、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S43)。この制限時車両制御処理では、運転者の運転操作量Dに修正学習値M3を乗じた操作量が出力操作量Eとして車両走行部10に出力される。また、修正学習値M3の値が1の場合には運転者の運転操作量Dの値が出力操作量Eとして車両走行部10に出力されることになる。
【0081】
以上説明した運転支援装置31によれば、運転者の運転操作量が逸脱操作量であると判断されたとしても、その後の運転経験の蓄積によって技量向上が見込まれることから、車両の運転時間に応じて操作量に加える制限を緩和していくことで、運転者に自らの技量向上を認識させることができる。従って、この運転支援装置31によれば、運転者に自らの技量向上を認識させることで、運転の技量向上を促すことができる。
【0082】
なお、修正学習値M3は、学習値M2の設定後の運転時間及びエンジン始動回数の両方ではなく、いずれか一方に応じて増加する態様であっても良い。
【0083】
[第4の実施形態]
図13及び図14に示されるように、第4の実施形態に係る運転支援装置41は、第1の実施形態に係る運転支援装置1と比べて、カーブにおけるアウトインアウト走行や車線変更、追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合に運転者の運転操作量Dの逸脱を判断しない点で主に異なる。
【0084】
図15は、車両がアウトインアウト走行を行う状況を示すための概略平面図である。図15において、車両をM、道路の中央線をCn、アウトインアウト走行の進路をR、規範操作量に基づく進路をRb、道路上で操作許容範囲Aに対応する領域をFaとして示す。
【0085】
図15に示されるように、車両Mが効率的に走行するため意図的にアウトインアウト走行の進路Rを選択すると、操作許容範囲Aに対応する領域Faから逸脱することになり、前述した実施形態に係る運転支援装置では車両制御への介入が行われてしまう。そこで、運転支援装置41では、アウトインアウト走行や追い越しなどの車両が取り得る車線逸脱走行パターンを予め算出し、車両が車線逸脱走行を行うと判断した場合には、運転者の運転操作量Dの操作許容範囲Aからの逸脱を判断しないことで、運転者による意図的な車線逸脱走行を可能とする。
【0086】
以下、第4の実施形態に係る運転支援装置41の構成について説明する。
【0087】
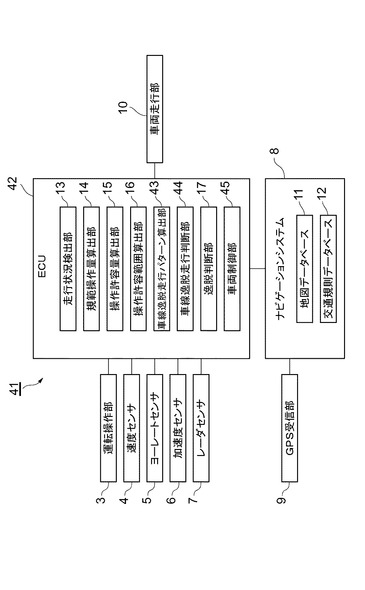
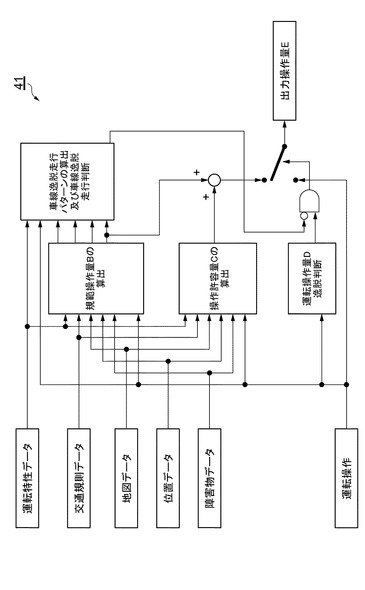
運転支援装置41のECU42は、車線逸脱走行パターン算出部43及び車線逸脱走行判断部44を有している。車線逸脱走行パターン算出部43は、過去の運転履歴から運転者の癖や運転傾向などの運転特性データを記憶している。この運転特性データには、過去に運転者がどのような車線でアウトインアウト走行や追い越しなどの車線逸脱走行を行ったかなどのデータが含まれている。
【0088】
車線逸脱走行パターン算出部43は、運転者の運転特性データと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、車両が取り得る車線逸脱走行パターンを算出する。
【0089】
車線逸脱走行判断部44は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと運転者の運転操作量Dとに基づいて、車両が車線逸脱走行を行うか否かの判断を行う。車両制御部45は、車線逸脱走行判断部44が車両は車線逸脱走行を行うと判断した場合、逸脱判断部17が運転者の運転操作量Dが操作許容範囲Aから逸脱していると判断した場合であっても、運転者の運転操作量Dに基づいて車両制御を行う。
【0090】
次に、第4の実施形態に係る運転支援装置41の動作について説明する。
【0091】
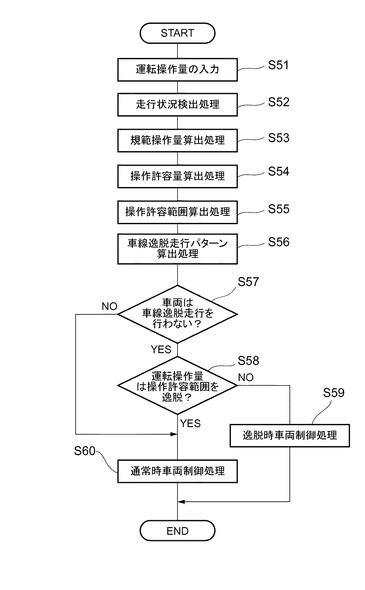
図16に示されるように、第4の実施形態に係る運転支援装置41では、まず運転者による運転操作量Dの入力が行われる(S51)。その後、走行状況検出部13は、運転操作部3や各種センサ4〜7、及びナビゲーションシステム8の出力結果に基づいて車両の走行状況の検出及び将来進路の算出を行う走行状況検出処理を行う(S52)。
【0092】
次に、規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて規範操作量Bを算出する規範操作量算出処理を行う(S53)。その後、操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて操作許容量Cを算出する操作許容量算出処理を行う(S54)。続いて、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S55)。
【0093】
その後、車線逸脱走行パターン算出部43は、走行状況検出部13の求めた車両の走行状況及び将来進路に基づいて、アウトインアウト走行や追い越しなど車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出処理を行う(S56)。
【0094】
続いて、車線逸脱走行判断部44は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと運転者の運転操作量Dとに基づいて、車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断処理を行う(S57)。車線逸脱走行判断部44が車両は車線逸脱走行を行うと判断した場合、ステップS60に移行する。
【0095】
一方、車線逸脱走行判断部44が車両は車線逸脱走行を行わないと判断した場合、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S58)。逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、ステップS60に移行する。
【0096】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、車両制御部45は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する逸脱時車両制御処理を行う(S59)。
【0097】
ステップS60において、車両制御部45は、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う。この通常時車両制御処理では、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0098】
以上説明した運転支援装置41によれば、カーブにおけるアウトインアウト走行や車線変更、追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合にまで、運転操作量Dを車線内の操作許容範囲Aに制限することは適切ではないことから、車両が車線逸脱走行を行うと判断された場合には運転者の運転操作量Dに基づいた車両制御を行う。これにより、この運転支援装置41によれば、車両運転の安全向上を図りつつも、運転者による意図的な車線逸脱走行を可能にすることができる。
【0099】
[第5の実施形態]
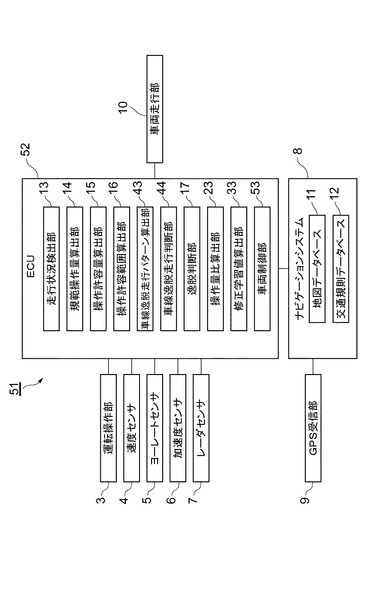
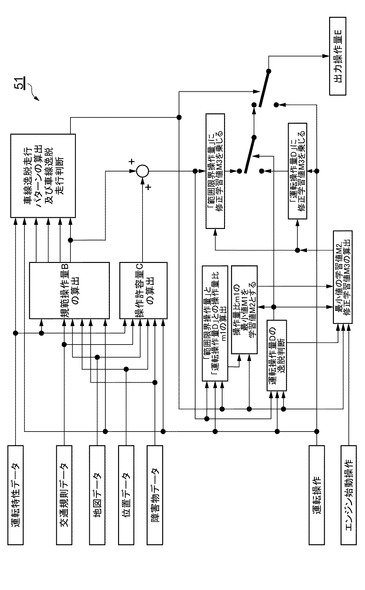
図17及び図18に示されるように、第5の実施形態に係る運転支援装置51は、第3の実施形態に係る運転支援装置31と比べて、車両が車線逸脱走行を行う場合に運転者の運転操作量Dの逸脱を判断せず、また操作量比m1を算出しない点で主に異なる。運転支援装置51の構成は前述した第3及び第4の実施形態とほぼ重複するため説明を省略する。
【0100】
以下、第5の実施形態に係る運転支援装置51の動作について説明する。
【0101】
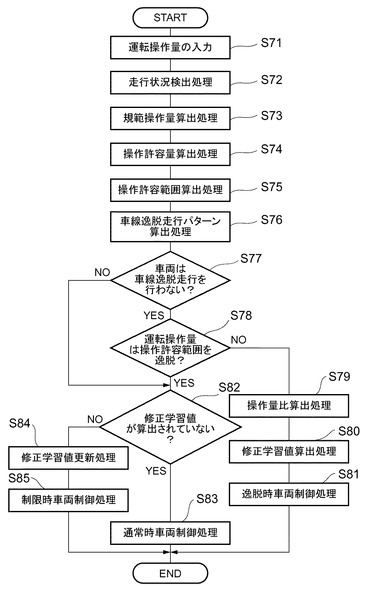
図19に示されるように、第5の実施形態に係る運転支援装置51では、まず運転者による運転操作量Dの入力が行われる(S71)。その後、走行状況検出部13は、運転操作部3や各種センサ4〜7、及びナビゲーションシステム8の出力に基づいて車両の走行状況の検出及び将来進路の算出を行う走行状況検出処理を行う(S72)。
【0102】
次に、規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて規範操作量Bを算出する規範操作量算出処理を行う(S73)。その後、操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて操作許容量Cを算出する操作許容量算出処理を行う(S74)。続いて、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S75)。
【0103】
その後、車線逸脱走行パターン算出部43は、走行状況検出部13の求めた車両の走行状況及び将来進路に基づいて、アウトインアウト走行や追い越しなど車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出処理を行う(S76)。
【0104】
続いて、車線逸脱走行判断部44は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと運転者の運転操作量Dとに基づいて、車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断処理を行う(S77)。車線逸脱走行判断部44が車両は車線逸脱走行を行うと判断した場合、ステップS85に移行する。
【0105】
一方、車線逸脱走行判断部44が車両は車線逸脱走行を行わないと判断した場合、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S78)。逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する操作量比算出場処理を行う(S79)。また、操作量比算出場処理において、操作量比算出部23は、操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を運転操作量Dの制限に用いる学習値M2として設定する。
【0106】
修正学習値算出部33は、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する修正学習値算出処理を行う(S80)。その後、車両制御部53は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する逸脱時出力制御処理を行う(S81)。
【0107】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部53は、修正学習値算出部33が修正学習値M3を算出したか否かを判断する修正操作量比算出判断処理を行う(S82)。車両制御部53は、修正学習値算出部33が修正学習値M3を算出していないと判断した場合、ステップS85に移行する。
【0108】
一方、車両制御部53が修正学習値算出部33は修正学習値M3を算出したと判断した場合、修正学習値算出部33は、記憶されている学習値M2と学習値M2の設定後の運転時間とに基づいて修正学習値M3を更新する修正学習値更新処理を行う(S83)。その後、車両制御部53は、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S84)。
【0109】
ステップS85において、車両制御部53は、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う。この通常時車両制御処理では、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0110】
以上説明した運転支援装置51によれば、カーブにおけるアウトインアウト走行や車線変更、追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合にまで、操作量比m1を算出して操作量の出力に制限を加えることは適切ではないことから、車両が車線逸脱走行を行うと判断された場合には操作量比m1の算出などの学習を行わない。従って、この運転支援装置51によれば、車線逸脱走行に起因して操作量の出力に制限が加えられることで、運転者が自らの技量を誤って認識してしまうことを避けることができる。
【0111】
[第6の実施形態]
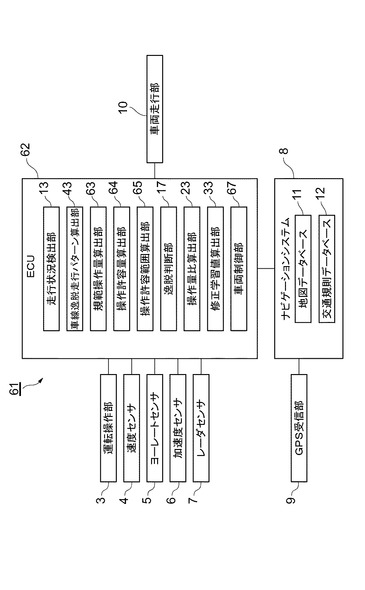
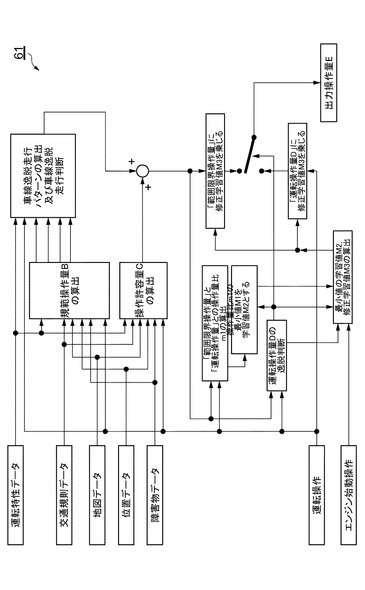
図20及び図21に示されるように、第6の実施形態に係る運転支援装置61は、第3の実施形態に係る運転支援装置31と比べて、アウトインアウト走行や追い越しなど車両が取り得る車線走行逸脱パターンに対応する操作許容範囲Aを算出する点が主に異なる。
【0112】
具体的には、運転支援装置61では、車両の取り得る車線走行逸脱パターンを予め算出し、車両が車線内を走行するパターン及び車線走行逸脱パターンの各パターンについて規範操作量B及び操作許容量Cを算出する。そして、これらの規範操作量B及び操作許容量Cから車線内を走行するパターン及び車線走行逸脱パターンに対応する操作許容範囲Aを算出する。
【0113】
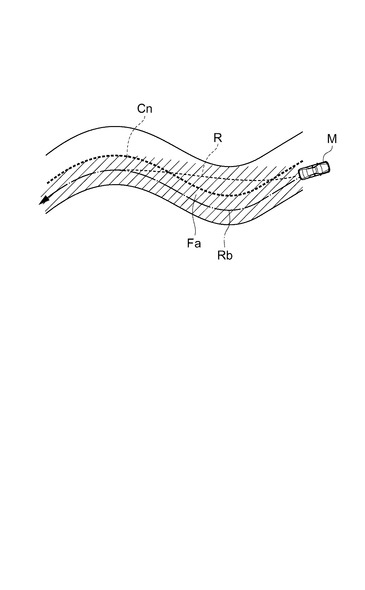
図22は、車両がアウトインアウト走行を行う状況を示すための概略平面図である。図22において、車両をM、S字状道路の中央線をCn、アウトインアウト走行の進路をR、規範操作量に基づく進路をRb、道路上で操作許容範囲Aに対応する領域をFaとして示す。図21に示されるように、運転支援装置61では、操作許容範囲Aに対応する領域Faがアウトインアウト走行の進路Rを含んで形成されている。これにより、運転支援装置61では、車両Mがアウトインアウト走行を行う場合であっても、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合には不適切な運転操作であると判断し、車両制御に介入することができる。
【0114】
以下、第6の実施形態に係る運転支援装置61の構成について説明する。運転支援装置61のECU62は、車両の取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出部43を有している。
【0115】
規範操作量算出部63は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、各パターンに対応した規範となる規範操作量Bを算出する。また、操作許容量算出部64は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、安全性などの観点から許容できる操作許容量Cを算出する。
【0116】
操作許容範囲算出部65は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて、車両が車線内を走行するパターン及び車線走行逸脱パターンに対応する操作許容範囲Aを算出する。運転支援装置61では、車線内を走行するパターン及び車線走行逸脱パターンに対応した操作許容範囲Aを利用して運転者の運転操作量Dの逸脱の判断や車両制御が行われる。
【0117】
次に、第6の実施形態に係る運転支援装置61の動作について説明する。
【0118】
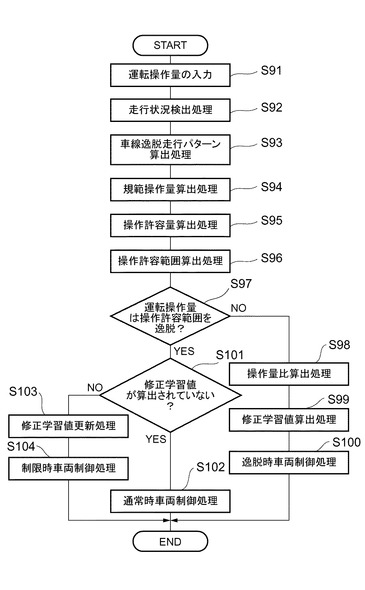
図23に示されるように、第6の実施形態に係る運転支援装置61では、まず運転者による運転操作量Dの入力が行われる(S91)。その後、走行状況検出部13は、運転操作部3や各種センサ4〜7、及びナビゲーションシステム8の出力に基づいて車両の走行状況の検出及び将来進路の算出を行う走行状況検出処理を行う(S92)。
【0119】
続いて、車線逸脱走行パターン算出部43は、走行状況検出部13の求めた車両の走行状況及び将来進路に基づいて、アウトインアウト走行や車線変更、追い越しなど車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出処理を行う(S93)。
【0120】
その後、規範操作量算出部63は、車線逸脱走行パターン算出部43が算出した車線逸脱パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、規範操作量Bを算出する規範操作量算出処理を行う(S94)。続いて、操作許容量算出部64は、車線逸脱走行パターン算出部43が算出した車線逸脱パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、操作許容量Cを算出する操作許容量算出処理を行う(S95)。
【0121】
その後、操作許容範囲算出部65は、規範操作量算出部63の算出した規範操作量Bと操作許容量算出部64の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S96)。
【0122】
次に、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S97)。逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する操作量比算出場処理を行う(S98)。また、操作量比算出場処理において、操作量比算出部23は、操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を学習値M2として設定する。
【0123】
修正学習値算出部33は、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する修正学習値算出処理を行う(S99)。その後、車両制御部34は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する逸脱時出力制御処理を行う(S100)。
【0124】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部53は、修正学習値算出部33が修正学習値M3を算出したか否かを判断する修正操作量比算出判断処理を行う(S101)。車両制御部34は、修正学習値算出部33が修正学習値M3を算出していないと判断した場合、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S102)。
【0125】
車両制御部34が修正学習値算出部33は修正学習値M3を算出したと判断した場合、修正学習値算出部33は、記憶されている学習値M2と学習値M2の設定後の運転時間とに基づいて修正学習値M3を更新する修正学習値更新処理を行う(S103)。その後、車両制御部34は、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S104)。
【0126】
以上説明した運転支援装置61によれば、車両が車線内を走行するパターンの他、車線逸脱走行パターンにも対応した操作許容範囲Aを算出することで、運転者が操作許容範囲A内で意図的に車線逸脱走行を行うことが可能になる。しかも、車線逸脱走行中においても操作許容範囲Aから逸脱したと判断された場合には車両制御に介入されるので、車線逸脱走行中における不適切な運転操作が車両制御に反映されることを避けることができ、車両運転の安全性の向上を図ることができる。
【0127】
本発明は、上述した実施形態に限定されるものではない。例えば、本発明は、四輪自動車や二輪自動車の他、パーソナルモビリティなどの車両に対しても有効に適用できる。
【0128】
また、操作許容範囲Aの算出方法は前述したものに限られない。種々のデータを用いてより詳細な走行状況を検出し、操作許容範囲Aを高精度に算出する態様であっても良い。
【符号の説明】
【0129】
1,21,31,41,51,61…運転支援装置 3…運転操作部 4…速度センサ 5…ヨーレートセンサ 6…加速度センサ 7…レーダセンサ 8…ナビゲーションシステム 9…GPS受信部 10…車両走行部 11…地図データベース 12…交通規則データベース 13…走行状況検出部(走行状況検出手段) 14,63…規範操作量算出部(規範操作量算出手段) 15,64…操作許容量算出部(操作許容量算出手段) 16,65…操作許容範囲算出部(操作許容範囲算出手段) 17…逸脱判断部(逸脱判断手段) 18,24,34,45,53…車両制御部(車両制御手段) 23…操作量比算出部(操作量比算出手段) 33…修正学習値算出部(修正学習値算出手段) 43…車線逸脱走行パターン算出部(車線逸脱走行パターン算出手段) 44…車線逸脱走行判断部(車線逸脱走行判断手段) A…操作許容範囲 B…規範操作量 C…操作許容量 D…運転操作量 E…出力操作量 Fa…操作許容範囲に対応する領域 M…車両 R…アウトインアウト走行の進路 m1…操作量比
【技術分野】
【0001】
本発明は、運転者による車両の運転操作を支援する運転支援装置に関する。
【背景技術】
【0002】
従来、運転支援装置として、例えば特開2005−250564号公報に記載のものが知られている。この公報に記載の運転支援装置は、地図データの走行経路に対応した安全運転の基準となる運転操作の基準データを記憶している。そして、この運転支援装置では、基準データに基づいて運転者の運転操作が安全運転の範囲から逸脱したか否かを判定し、運転者の運転操作が安全運転の範囲から逸脱した場合に車両を手動運転モードから自動運転モードに切り換える。自動運転モードでは、基準データに基づいた最適な運転操作が自動で行われる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−250564号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述した従来の運転支援装置においては、運転者の運転操作が安全運転の範囲から逸脱すると自動運転モードに切り替わってしまうため、運転者の運転操作が反映されず、運転者は運転技量が不足していることを体験できない。このため、従来の運転支援装置においては、運転者の技量向上につながらないという問題があった。
【0005】
そこで、本発明は、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことのできる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明は、運転者による車両の運転操作を支援する運転支援装置であって、車両の走行状況を検出する走行状況検出手段と、走行状況検出手段の検出した走行状況に基づいて、車両の操作許容範囲を算出する操作許容範囲算出手段と、運転者の運転操作量が操作許容範囲から逸脱した逸脱操作量であるか否かを判断する逸脱判断手段と、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断した場合、操作許容範囲内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する車両制御手段と、を備えることを特徴とする。
【0007】
本発明に係る運転支援装置によれば、運転者の運転操作量が操作許容範囲から逸脱した場合に運転操作量ではなく範囲限界操作量に基づいて車両を制御するので、不適切な運転操作が車両制御に反映されることを避けることができ、車両運転の安全性向上が図られる。しかも、この運転支援装置によれば、運転操作量が操作許容範囲から逸脱した場合、従来のように基準となる操作量で自動運転されるのではなく、操作許容範囲内で逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両が制御されるので、運転操作の結果が運転者にフィードバックされ、運転者に運転技量の低さを認識させることができる。従って、この運転支援装置によれば、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことができる。
【0008】
本発明に係る運転支援装置においては、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、車両制御装置は、操作量比算出手段が操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量であると判断したときには、範囲限界操作量を操作量比に応じて制限した操作量に基づいて車両を制御することが好ましい。
【0009】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されて車両制御が行われた場合、その後の範囲限界操作量の出力について操作量比に応じた制限を加えることで、運転者はどれだけ逸脱したのかを認識することができる。従って、この運転支援装置によれば、運転者は自分の運転技量をより正確に認識することができるので、効果的に運転者の技量向上を促すことができる。
【0010】
本発明に係る運転支援装置においては、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、車両制御装置は、操作量比算出手段が操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量ではないと判断したときに、当該運転操作量を操作量比に応じて制限した制限操作量に基づいて車両を制御することが好ましい。
【0011】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されて車両制御が行われた場合、その後の運転操作量の出力について操作量比に応じた制限を加えることで、運転者はどれだけ逸脱したのかを認識することができる。従って、この運転支援装置によれば、運転者は自分の運転技量をより正確に認識することができるので、効果的に運転者の技量向上を促すことができる。
【0012】
本発明に係る運転支援装置においては、操作量比算出手段が操作量比を算出した場合、車両の運転時間及び車両のエンジンの始動回数の少なくとも一方と操作量比とに基づいて、操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、車両制御装置は、修正操作量比算出手段が修正操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量であると判断したときには、範囲限界操作量を修正操作量比に応じて制限した操作量に基づいて車両を制御することが好ましい。
【0013】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されたとしても、その後の運転経験の蓄積によって技量向上が見込まれることから、範囲限界操作量の出力に対する制限を車両の運転時間やエンジンの始動回数に応じて緩和していくことで、運転者に自らの技量向上を認識させることができる。従って、この運転支援装置によれば、運転者に自らの技量向上を認識させることで、運転の技量向上を促すことができる。
【0014】
また、本発明に係る運転支援装置においては、操作量比算出手段が操作量比を算出した場合、車両の運転時間及び車両のエンジンの始動回数の少なくとも一方と操作量比とに基づいて、操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、車両制御装置は、修正操作量比算出手段が修正操作量比を算出した場合、逸脱操作判断手段が運転者の運転操作量は逸脱操作量ではないと判断したときに、当該運転操作量を修正操作量比に応じて制限した制限操作量に基づいて車両を制御することが好ましい。
【0015】
本発明に係る運転支援装置によれば、運転者の運転操作量が逸脱操作量であると判断されたとしても、その後の運転経験の蓄積によって技量向上が見込まれることから、運転操作量の出力に対する制限を車両の運転時間やエンジンの始動回数に応じて緩和していくことで、運転者に自らの技量向上を認識させることができる。従って、この運転支援装置によれば、運転者に自らの技量向上を認識させることで、運転の技量向上を促すことができる。
【0016】
本発明に係る運転支援装置においては、走行状況検出手段の検出した走行状況に基づいて、車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段と、車線逸脱走行パターン算出手段の算出した車線逸脱走行パターンと運転者の運転操作量とに基づいて、車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断手段と、を更に備え、車両制御装置は、車線逸脱走行判断手段が車両は車線逸脱走行を行うと判断した場合、逸脱判断手段が運転者の運転操作量は逸脱操作量であると判断したときであっても、運転者の運転操作量に基づいて車両を制御することが好ましい。
【0017】
本発明に係る運転支援装置では、カーブにおけるアウトインアウト走行や車両追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合にまで、運転操作量を車線内の操作許容範囲に制限することは適切ではないことから、車両が車線逸脱走行を行うと判断された場合には運転者の運転操作量に基づいた車両制御を行う。従って、この運転支援装置によれば、車両運転の安全向上を図りつつも、運転者による意図的な車線逸脱走行を可能にすることができる。
【0018】
本発明に係る運転支援装置においては、走行状況検出手段の検出した走行状況に基づいて、車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段を更に備え、操作許容範囲算出手段は、車両が車線内を走行する場合の操作許容範囲と車両が車線逸脱走行パターンに沿って走行する場合の操作許容範囲とを算出することが好ましい。
【0019】
本発明に係る運転支援装置では、車両が取り得る車線逸脱走行パターンを含めた操作許容範囲を算出するので、運転者は操作許容範囲内で意図的な車線逸脱走行を行うことができる。しかも、車線逸脱走行中に運転を誤った場合には、操作許容範囲から逸脱したと判断されて車両が制御されるので、車線逸脱走行中においても安全性の向上を図ることができる。
【発明の効果】
【0020】
本発明によれば、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことができる。
【図面の簡単な説明】
【0021】
【図1】第1の実施形態に係る運転支援装置を示すブロック図である。
【図2】第1の実施形態に係る運転支援装置を示す機能構成図である。
【図3】第1の実施形態に係る運転支援装置による運転支援を説明するための図である。
【図4】第1の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図5】第2の実施形態に係る運転支援装置を示すブロック図である。
【図6】第2の実施形態に係る運転支援装置を示す機能構成図である。
【図7】第2の実施形態に係る運転支援装置による運転支援を説明するための図である。
【図8】第2の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図9】第3の実施形態に係る運転支援装置を示すブロック図である。
【図10】第3の実施形態に係る運転支援装置を示す機能構成図である。
【図11】第3の実施形態に係る運転支援装置による運転支援を説明するための図である。
【図12】第3の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図13】第4の実施形態に係る運転支援装置を示すブロック図である。
【図14】第4の実施形態に係る運転支援装置を示す機能構成図である。
【図15】車両がアウトインアウト走行を行う状況を示すための概略平面図である。
【図16】第4の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図17】第5の実施形態に係る運転支援装置を示すブロック図である。
【図18】第5の実施形態に係る運転支援装置を示す機能構成図である。
【図19】第5の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【図20】第6の実施形態に係る運転支援装置を示すブロック図である。
【図21】第6の実施形態に係る運転支援装置を示す機能構成図である。
【図22】車両がアウトインアウト走行を行う状況を示すための概略平面図である。
【図23】第6の実施形態に係る運転支援装置の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の好適な実施形態について、図面を参照して詳細に説明する。なお、各図において同一又は相当部分には同一符号を付し、重複する説明を省略する。
【0023】
[第1の実施形態]
図1〜図3に示されるように、第1の実施形態に係る運転支援装置1は、運転者が不適切な運転操作を行った場合に車両制御に介入することで、運転者による車両の運転を支援するものである。運転支援装置1は、運転者の運転操作量Dが操作許容範囲Aから逸脱した場合に、運転者が不適切な運転操作を行ったと判断する。操作許容範囲Aは、車両の安全性確保や交通ルール遵守などの観点から運転者の自在な運転操作が許容される範囲である。
【0024】
ここで、図3(a)は、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合を示すグラフである。縦軸は操作量、横軸は時間経過を示している。図3(a)に示されるように、運転操作量Dの一部は、操作許容範囲Aを逸脱している。この逸脱した運転操作量Dを逸脱操作量、逸脱した区間を逸脱判断区間とする。
【0025】
操作許容範囲Aは、規範操作量B及び操作許容量Cを用いて表される。規範操作量Bとは、走行車線や交通規則に対応した規範となる操作量である。例えば、規範操作量Bは、走行車線の中央を車両が走行するための規範となる操作量として算出される。操作許容量Cとは、規範操作量Bから外れても許容できる範囲の操作量である。例えば、操作許容量Cは、走行車線から車両が逸脱しない範囲の操作量として算出される。操作許容範囲Aは、数値的に、規範操作量Bに操作許容量Cを加えた操作量と規範操作量Bから操作許容量Cを除いた操作量との間の範囲として表される。なお、操作許容範囲Aの算出について、規範操作量Bに加算する操作許容量Cと規範操作量Bから減算する操作許容量Cとは同じ量とは限らない。
【0026】
図3(b)は、図3(a)の場合に車両に出力される出力操作量Eを示すグラフである。出力操作量Eとは、車両に出力されて実際の車両制御に反映される操作量である。図3(b)において出力操作量Eを太線で示す。
【0027】
図3(b)に示されるように、運転支援装置1では、運転操作量Dが操作許容範囲Aから逸脱しない区間においては運転操作量Dを出力操作量Eとして車両に出力する。また、運転支援装置1では、運転操作量Dが操作許容範囲Aから逸脱した逸脱判断区間においては操作許容範囲A内で運転操作量Dに最も近い操作量である範囲限界操作量を出力操作量Eとして車両に出力する。
【0028】
このように、運転支援装置1では、運転者の運転操作量Dが操作許容範囲Aから逸脱している場合に、逸脱判断区間内の運転操作量Dを範囲限定操作量に置き換えて車両に出力することで、不適切な運転操作が車両制御に反映されることを避けることができ、車両運転の安全性向上が図られる。
【0029】
次に、第1の実施形態に係る運転支援装置1の構成について説明する。
【0030】
図1に示されるように、運転支援装置1は、装置を統括適に制御するECU[Electronic Control Unit]2を備えている。ECU2は、CPU[Central Processing Unit]、ROM[Read Only Memory]、RAM[Random Access Memory]などからなる電子制御ユニットである。ECU2では、ROMに記憶されているアプリケーションプログラムをRAMにロードし、CPUで実行することで、操作許容範囲Aの算出などの各種演算処理を行う。
【0031】
ECU2は、運転操作部3、速度センサ4、ヨーレートセンサ5、加速度センサ6、レーダセンサ7、ナビゲーションシステム8、及び車両走行部10と接続されている。運転操作部3は、運転者が車両に運転操作を入力するためのものである。運転操作部3は、ハンドルやアクセルペダル、ブレーキペダルなどから構成されている。運転操作部3は、運転者から入力された運転操作をECU2に出力する。
【0032】
速度センサ4は、車両の速度を検出するセンサであり、ヨーレートセンサ5は車両のヨーレートを検出するセンサである。また、加速度センサ6は車両の加速度を検出するセンサである。速度センサ4は速度センサ4、ヨーレートセンサ5、及び加速度センサ6は、それぞれ検出結果をECU2に出力する。レーダセンサ7は、他車両や歩行者などの障害物を検出するセンサである。レーダセンサ7は、車両周囲に存在する障害物を検出した場合、検出結果をECU2に出力する。
【0033】
ナビゲーションシステム8は、車両の運転者に経路案内を行うシステムである。ナビゲーションシステム8には、車両の位置を検出するためのGPS[Global Positioning System]受信部9が接続されている。GPS受信部9は、複数のGPS衛星からの信号を受信することで車両の位置を検出する。また、ナビゲーションシステム8は、道路地図データを記憶した地図データベース11と、交通規則データを記憶した交通規則データベース12と、を備えている。ナビゲーションシステム8は、GPS受信部9による車両の位置データ、地図データベース11の道路地図データ、及び交通規則データベース12の交通規則データを利用して運転者に目的地までの経路案内を行う。ナビゲーションシステム8は、車両の位置データ、道路地図データ、及び交通規則データをECU2に出力する。
【0034】
車両走行部10は、車両の走行制御を実行するものである。車両走行部10は、車両のエンジン制御部、ステアリングアクチュエータ、ブレーキアクチュエータ、及びシフトアクチュエータなどから構成されている。車両走行部10は、ECU2の出力信号に応じて車両の走行制御を行う。
【0035】
ECU2は、走行状況検出部13、規範操作量算出部14、操作許容量算出部15、操作許容範囲算出部16、逸脱判断部17、及び車両制御部18を有している。
【0036】
走行状況検出部13は、各種のセンサ4〜7及びナビゲーションシステム8からの出力に基づいて、車両の走行状況を検出する。車両の走行状況には、車両の走行する道路形状、交通規則、車両の速度や姿勢、車両周囲の障害物など車両の走行に関わるあらゆる状況が含まれる。また、走行状況検出部13は、検出した走行状況及び運転操作部3からの出力に基づいて車両の将来進路を算出する。
【0037】
規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて、車線形状や交通規則に対応した規範となる操作量である規範操作量Bを算出する。操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて、規範操作量Bから外れても許容できる範囲の操作量である操作許容量Cを算出する。操作許容量算出部15は、車両が車線から逸脱しない、歩行者などの障害物に接触しない、一時停止などの交通規則を逸脱しないなどの条件を満たすように操作許容量Cを算出する。
【0038】
操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて、操作許容範囲Aを算出する。逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する。
【0039】
車両制御部18は、逸脱判断部17が逸脱操作量であると判断した場合、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する。範囲限界操作量は、規範操作量Bに操作許容量Cを加えた操作量又は規範操作量Bから操作許容量Cを除いた操作量に相当する。車両制御部18は、逸脱判断部17が逸脱操作量であると判断した場合、範囲限界操作量を出力操作量Eとして車両走行部10に出力することで車両の走行を制御する。一方、車両制御部18は、逸脱判断部17が逸脱操作量ではないと判断した場合、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0040】
続いて、第1の実施形態に係る運転支援装置1の動作について説明する。
【0041】
図4に示されるように、第1の実施形態に係る運転支援装置1では、まず運転者による運転操作量Dの入力が行われる(S1)。運転者は、運転操作部3を操作することで車両に対する運転操作の入力を行う。その後、走行状況検出部13は、各種のセンサ4〜7及びナビゲーションシステム8の出力に基づいて車両の走行状況を検出する走行状況検出処理を行う(S2)。また走行状況検出処理において、走行状況検出部13は、車両の走行状況と運転操作部3から出力された運転者の運転操作量Dとに基づいて車両の将来進路を算出する。
【0042】
次に、規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて規範操作量Bを算出する規範操作量算出処理を行う(S3)。その後、操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて操作許容量Cを算出する操作許容量算出処理を行う(S4)。
【0043】
続いて、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S5)。その後、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S6)。
【0044】
逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、車両制御部18は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する逸脱時車両制御処理を行う(S7)。この逸脱時車両制御処理では、範囲限界操作量が出力操作量Eとして車両走行部10に出力される。
【0045】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部18は、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S8)。この通常時車両制御処理では、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0046】
以上説明した運転支援装置1によれば、運転者の運転操作量Dが操作許容範囲Aから逸脱した場合に運転操作量Dではなく範囲限界操作量に基づいて車両を制御することで、不適切な運転操作が車両制御に反映されることを避けることができるので、車両運転の安全性向上を図られる。しかも、この運転支援装置1によれば、運転操作量Dが操作許容範囲Aから逸脱した場合、従来のように基準となる操作量で自動運転されるのではなく、操作許容範囲A内で逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両が制御されるので、運転操作の結果が運転者にフィードバックされ、運転者に運転技量の低さを認識させることができる。従って、この運転支援装置1によれば、車両運転の安全性向上を図りつつ、運転者の技量向上を促すことができる。
【0047】
[第2の実施形態]
図5及び図6に示されるように、第2の実施形態に係る運転支援装置21は、第1の実施形態に係る運転支援装置1と比べて、運転者の運転操作量Dが操作許容範囲Aから逸脱した場合に運転操作量Dの逸脱程度に応じて、以降の操作量の出力を制限する点が主に異なる。
【0048】
具体的には、運転支援装置21は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断した場合、当該逸脱操作量と操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量との比である操作量比m1を算出する。この操作量比は1以下の値として算出される。すなわち、逸脱操作量及び範囲限界操作量のうち量の大きい方を1とした場合の小さい方の比率が操作量比m1として算出される。操作量比m1は、運転操作量Dの逸脱の程度が大きいほど小さな値が算出される。
【0049】
また、運転支援装置21は、算出した操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。運転支援装置21は、最小値M1を学習値M2として設定する。学習値M2は、操作量の出力の制限に用いられる値である。なお、学習値M2は、最小値M1と同じ値のものに限られず、最小値M1に応じた異なる値を学習値M2として算出する態様であっても良い。このように、運転支援装置21では、記憶した操作量比m1の最小値M1を学習値M2とすることで、毎回算出した操作量比m1を操作量の出力の制限に用いる場合と比べて、演算処理量の低減を図ることができる。
【0050】
ここで、図7(a)は、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合を示すグラフである。縦軸は操作量、横軸は時間経過を示している。また、図7(b)は、第2の実施形態の運転支援装置21における出力操作量Eを示すグラフである。図7(a)及び図7(b)に示されるように、運転支援装置21では、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断されると、以降の範囲限界操作量及び運転操作量Dの出力について学習値M2に応じた制限が加えられる。具体的には、範囲限界操作量又は運転操作量Dに学習値M2を乗じた操作量が出力操作量Eとして車両に出力される。学習値M2に応じた制限が加えられる区間を学習値反映区間として示す。
【0051】
以下、第2の実施形態に係る運転支援装置21の構成について説明する。前述した実施形態と重複する部分については説明を省略する。
【0052】
運転支援装置21のECU22は、操作量比算出部23を有している。操作量比算出部23は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断した場合、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する。また、操作量比算出部23は、操作量比m1のうち最も小さい値を最小値M1として記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を学習値M2として設定する。
【0053】
車両制御部24は、操作量比算出部23が学習値M2を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断したときには、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に学習値M2を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部24は、学習値M2に応じて範囲限界操作量を制限した操作量に基づいて車両を制御する。
【0054】
また、車両制御部24は、操作量比算出部23が学習値M2を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断したときには、運転者の運転操作量Dに学習値M2を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部24は、学習値M2に応じて運転者の運転操作量Dを制限した操作量に基づいて車両を制御する。
【0055】
続いて、第2の実施形態に係る運転支援装置21の動作について説明する。
【0056】
図8に示されるように、第2の実施形態に係る運転支援装置21では、まず運転者による運転操作量Dの入力が行われる(S11)。運転者は、運転操作部3を操作することで車両に対する運転操作の入力を行う。その後、走行状況検出部13は、運転操作部3、各種のセンサ4〜7、及びナビゲーションシステム8に基づいて、車両の走行状況の検出及び車両の将来進路の算出を行う走行状況検出処理を行う(S12)。
【0057】
次に、規範操作量算出部14が車両の走行状況の検出及び車両の将来進路に基づいて規範操作量Bを算出する規範操作量算出処理が行われる(S13)。続いて、操作許容量算出部15は、車両の走行状況の検出及び車両の将来進路に基づいて操作許容量Cを算出する操作許容量算出処理が行われる(S14)。
【0058】
その後、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S15)。次に、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S16)。
【0059】
逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する(S17)。また、操作量比算出部23は、操作量比m1のうち最も小さい値を最小値M1として記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を学習値M2として設定する。
【0060】
その後、車両制御部24は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量を算出すると共に、当該範囲限界操作量に学習値M2を乗じた操作量に基づいて車両を制御する逸脱時車両制御処理を行う(S18)。この逸脱時車両制御処理では、範囲限界操作量に学習値M2を乗じた操作量が出力操作量Eとして車両走行部10に出力される。
【0061】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部24は、操作量比算出部23が操作量比m1を算出したか否かを判断する操作量比算出判断処理を行う(S19)。車両制御部24は、操作量比算出部23が操作量比m1を算出していないと判断した場合、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S20)。
【0062】
車両制御部24は、操作量比算出部23が操作量比m1を算出したと判断した場合、運転者の運転操作量Dに学習値M2を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S21)。この制限時車両制御処理では、運転者の運転操作量Dに学習値M2を乗じた操作量が出力操作量Eとして車両走行部10に出力される。
【0063】
以上説明した運転支援装置21によれば、運転者の運転操作量Dが逸脱操作量であると判断されて車両制御が行われた場合、その後の範囲限界操作量及び運転操作量Dの出力について操作量比m1に応じた制限を加えることで、運転者はどれだけ逸脱したのかを認識することができる。従って、この運転支援装置21によれば、運転者は自分の運転技量をより正確に認識することができるので、効果的に運転者の技量向上を促すことができる。なお、範囲限界操作量及び運転操作量Dのいずれか一方にのみ制限を加える態様であっても良い。
【0064】
[第3の実施形態]
図9及び図10に示されるように、第3の実施形態に係る運転支援装置31は、第2の実施形態に係る運転支援装置21と比べて、範囲限界操作量及び運転操作量Dの出力に加える制限を運転時間の経過等に応じて小さくする点が主に異なる。
【0065】
具体的には、運転支援装置31は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断した場合、当該逸脱操作量と操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量との比である操作量比m1を算出する。運転支援装置31は、算出した操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。運転支援装置31は、最小値M1を学習値M2として設定する。
【0066】
更に、運転支援装置31は、学習値M2の設定後の運転時間に基づいて、学習値M2を増加するように修正した修正学習値M3を算出する。修正学習値M3は、特許請求の範囲に記載の修正操作量比に相当する。この修正学習値M3は、学習値M2の設定後の運転時間が0の場合、すなわち学習値M2の設定直後は学習値M2と等しい値をとる。
【0067】
ここで、図11(a)は、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合を示すグラフである。縦軸は操作量、横軸は時間経過を示している。また、図11(b)は、第3の実施形態の運転支援装置31における出力操作量Eを示すグラフである。図11(a)及び図11(b)に示されるように、運転支援装置31では、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であると判断されると、その後の範囲限界操作量及び運転操作量Dの出力について修正学習値M3に応じた制限が加えられる。具体的には、範囲限界操作量又は運転操作量Dに修正学習値M3を乗じた操作量が出力操作量Eとして車両に出力される。
【0068】
この運転支援装置31では、修正学習値M3が学習値M2の設定後の運転時間及びエンジン始動回数に応じて1に近づくように増加する。すなわち、運転時間の経過及びエンジン停止後の始動操作の回数に伴って運転者の運転操作量Dや範囲限界操作量の出力の制限が緩和され、元の操作量が出力されるようになる。修正学習値M3は、学習値M2と運転時間との比に基づいて増加するように算出される。また、運転支援装置31では、運転者の運転操作量Dが再び操作許容範囲Aから逸脱した場合には、新たな修正学習値M3が再び算出される。
【0069】
以下、第3の実施形態に係る運転支援装置31の構成について説明する。
【0070】
運転支援装置31のECU32は、修正学習値算出部33を有している。修正学習値算出部33は、操作量比算出部23が学習値M2を設定した場合、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する。修正学習値算出部33は、逸脱判断部17が運転者の運転操作量Dが再び操作許容範囲Aから逸脱したと判断した場合には、新たな学習値M2の値に合わせて修正学習値M3を再び算出する。この修正学習値算出部33は、特許請求の範囲に記載の修正操作量比算出手段に相当する。
【0071】
車両制御部34は、修正学習値算出部33が修正学習値M3を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断したときには、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部34は、修正学習値M3に応じて範囲限界操作量を制限した操作量に基づいて車両を制御する。
【0072】
また、車両制御部34は、修正学習値算出部33が修正学習値M3を算出した場合、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断したときには、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する。すなわち、車両制御部34は、修正学習値M3に応じて運転者の運転操作量Dを制限した操作量に基づいて車両を制御する。なお、修正学習値M3が1である場合には運転操作量Dの値がそのまま車両制御
【0073】
続いて、第3の実施形態に係る運転支援装置31の動作について説明する。
【0074】
図8に示されるように、第3の実施形態に係る運転支援装置31では、まず運転者による運転操作量Dの入力が行われる(S31)。その後、走行状況検出部13は、運転操作部3、各種のセンサ4〜7、及びナビゲーションシステム8に基づいて、車両の走行状況の検出及び車両の将来進路の算出を行う走行状況検出処理を行う(S32)。
【0075】
次に、規範操作量算出部14が車両の走行状況の検出及び車両の将来進路に基づいて規範操作量Bを算出する規範操作量算出処理が行われる(S33)。続いて、操作許容量算出部15は、車両の走行状況の検出及び車両の将来進路に基づいて、操作許容量Cを算出する操作許容量算出処理が行われる(S34)。
【0076】
その後、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S35)。次に、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S36)。
【0077】
逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する操作量比算出場処理を行う(S37)。操作量比算出場処理において、操作量比算出部23は、操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。また、操作量比算出部23は、最小値M1を運転操作量Dの制限に用いる学習値M2として設定する。
【0078】
修正学習値算出部33は、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する修正学習値算出処理を行う(S38)。その後、車両制御部34は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する逸脱時出力制御処理を行う(S39)。すなわち、車両制御部34は、修正学習値M3に応じて範囲限界操作量を制限した操作量に基づいて車両を制御する。
【0079】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部34は、修正学習値算出部33が修正学習値M3を算出したか否かを判断する修正操作量比算出判断処理を行う(S40)。車両制御部34は、修正学習値算出部33が修正学習値M3を算出していないと判断した場合、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S41)。
【0080】
車両制御部34が修正学習値算出部33は修正学習値M3を算出したと判断した場合、修正学習値算出部33は、記憶されている学習値M2と学習値M2の設定後の運転時間とに基づいて修正学習値M3を更新する修正学習値更新処理を行う(S42)。その後、車両制御部34は、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S43)。この制限時車両制御処理では、運転者の運転操作量Dに修正学習値M3を乗じた操作量が出力操作量Eとして車両走行部10に出力される。また、修正学習値M3の値が1の場合には運転者の運転操作量Dの値が出力操作量Eとして車両走行部10に出力されることになる。
【0081】
以上説明した運転支援装置31によれば、運転者の運転操作量が逸脱操作量であると判断されたとしても、その後の運転経験の蓄積によって技量向上が見込まれることから、車両の運転時間に応じて操作量に加える制限を緩和していくことで、運転者に自らの技量向上を認識させることができる。従って、この運転支援装置31によれば、運転者に自らの技量向上を認識させることで、運転の技量向上を促すことができる。
【0082】
なお、修正学習値M3は、学習値M2の設定後の運転時間及びエンジン始動回数の両方ではなく、いずれか一方に応じて増加する態様であっても良い。
【0083】
[第4の実施形態]
図13及び図14に示されるように、第4の実施形態に係る運転支援装置41は、第1の実施形態に係る運転支援装置1と比べて、カーブにおけるアウトインアウト走行や車線変更、追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合に運転者の運転操作量Dの逸脱を判断しない点で主に異なる。
【0084】
図15は、車両がアウトインアウト走行を行う状況を示すための概略平面図である。図15において、車両をM、道路の中央線をCn、アウトインアウト走行の進路をR、規範操作量に基づく進路をRb、道路上で操作許容範囲Aに対応する領域をFaとして示す。
【0085】
図15に示されるように、車両Mが効率的に走行するため意図的にアウトインアウト走行の進路Rを選択すると、操作許容範囲Aに対応する領域Faから逸脱することになり、前述した実施形態に係る運転支援装置では車両制御への介入が行われてしまう。そこで、運転支援装置41では、アウトインアウト走行や追い越しなどの車両が取り得る車線逸脱走行パターンを予め算出し、車両が車線逸脱走行を行うと判断した場合には、運転者の運転操作量Dの操作許容範囲Aからの逸脱を判断しないことで、運転者による意図的な車線逸脱走行を可能とする。
【0086】
以下、第4の実施形態に係る運転支援装置41の構成について説明する。
【0087】
運転支援装置41のECU42は、車線逸脱走行パターン算出部43及び車線逸脱走行判断部44を有している。車線逸脱走行パターン算出部43は、過去の運転履歴から運転者の癖や運転傾向などの運転特性データを記憶している。この運転特性データには、過去に運転者がどのような車線でアウトインアウト走行や追い越しなどの車線逸脱走行を行ったかなどのデータが含まれている。
【0088】
車線逸脱走行パターン算出部43は、運転者の運転特性データと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、車両が取り得る車線逸脱走行パターンを算出する。
【0089】
車線逸脱走行判断部44は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと運転者の運転操作量Dとに基づいて、車両が車線逸脱走行を行うか否かの判断を行う。車両制御部45は、車線逸脱走行判断部44が車両は車線逸脱走行を行うと判断した場合、逸脱判断部17が運転者の運転操作量Dが操作許容範囲Aから逸脱していると判断した場合であっても、運転者の運転操作量Dに基づいて車両制御を行う。
【0090】
次に、第4の実施形態に係る運転支援装置41の動作について説明する。
【0091】
図16に示されるように、第4の実施形態に係る運転支援装置41では、まず運転者による運転操作量Dの入力が行われる(S51)。その後、走行状況検出部13は、運転操作部3や各種センサ4〜7、及びナビゲーションシステム8の出力結果に基づいて車両の走行状況の検出及び将来進路の算出を行う走行状況検出処理を行う(S52)。
【0092】
次に、規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて規範操作量Bを算出する規範操作量算出処理を行う(S53)。その後、操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて操作許容量Cを算出する操作許容量算出処理を行う(S54)。続いて、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S55)。
【0093】
その後、車線逸脱走行パターン算出部43は、走行状況検出部13の求めた車両の走行状況及び将来進路に基づいて、アウトインアウト走行や追い越しなど車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出処理を行う(S56)。
【0094】
続いて、車線逸脱走行判断部44は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと運転者の運転操作量Dとに基づいて、車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断処理を行う(S57)。車線逸脱走行判断部44が車両は車線逸脱走行を行うと判断した場合、ステップS60に移行する。
【0095】
一方、車線逸脱走行判断部44が車両は車線逸脱走行を行わないと判断した場合、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S58)。逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、ステップS60に移行する。
【0096】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、車両制御部45は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する逸脱時車両制御処理を行う(S59)。
【0097】
ステップS60において、車両制御部45は、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う。この通常時車両制御処理では、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0098】
以上説明した運転支援装置41によれば、カーブにおけるアウトインアウト走行や車線変更、追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合にまで、運転操作量Dを車線内の操作許容範囲Aに制限することは適切ではないことから、車両が車線逸脱走行を行うと判断された場合には運転者の運転操作量Dに基づいた車両制御を行う。これにより、この運転支援装置41によれば、車両運転の安全向上を図りつつも、運転者による意図的な車線逸脱走行を可能にすることができる。
【0099】
[第5の実施形態]
図17及び図18に示されるように、第5の実施形態に係る運転支援装置51は、第3の実施形態に係る運転支援装置31と比べて、車両が車線逸脱走行を行う場合に運転者の運転操作量Dの逸脱を判断せず、また操作量比m1を算出しない点で主に異なる。運転支援装置51の構成は前述した第3及び第4の実施形態とほぼ重複するため説明を省略する。
【0100】
以下、第5の実施形態に係る運転支援装置51の動作について説明する。
【0101】
図19に示されるように、第5の実施形態に係る運転支援装置51では、まず運転者による運転操作量Dの入力が行われる(S71)。その後、走行状況検出部13は、運転操作部3や各種センサ4〜7、及びナビゲーションシステム8の出力に基づいて車両の走行状況の検出及び将来進路の算出を行う走行状況検出処理を行う(S72)。
【0102】
次に、規範操作量算出部14は、走行状況検出部13の求めた走行状況及び将来進路に基づいて規範操作量Bを算出する規範操作量算出処理を行う(S73)。その後、操作許容量算出部15は、走行状況検出部13の求めた走行状況及び将来進路に基づいて操作許容量Cを算出する操作許容量算出処理を行う(S74)。続いて、操作許容範囲算出部16は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S75)。
【0103】
その後、車線逸脱走行パターン算出部43は、走行状況検出部13の求めた車両の走行状況及び将来進路に基づいて、アウトインアウト走行や追い越しなど車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出処理を行う(S76)。
【0104】
続いて、車線逸脱走行判断部44は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと運転者の運転操作量Dとに基づいて、車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断処理を行う(S77)。車線逸脱走行判断部44が車両は車線逸脱走行を行うと判断した場合、ステップS85に移行する。
【0105】
一方、車線逸脱走行判断部44が車両は車線逸脱走行を行わないと判断した場合、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S78)。逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する操作量比算出場処理を行う(S79)。また、操作量比算出場処理において、操作量比算出部23は、操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を運転操作量Dの制限に用いる学習値M2として設定する。
【0106】
修正学習値算出部33は、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する修正学習値算出処理を行う(S80)。その後、車両制御部53は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する逸脱時出力制御処理を行う(S81)。
【0107】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部53は、修正学習値算出部33が修正学習値M3を算出したか否かを判断する修正操作量比算出判断処理を行う(S82)。車両制御部53は、修正学習値算出部33が修正学習値M3を算出していないと判断した場合、ステップS85に移行する。
【0108】
一方、車両制御部53が修正学習値算出部33は修正学習値M3を算出したと判断した場合、修正学習値算出部33は、記憶されている学習値M2と学習値M2の設定後の運転時間とに基づいて修正学習値M3を更新する修正学習値更新処理を行う(S83)。その後、車両制御部53は、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S84)。
【0109】
ステップS85において、車両制御部53は、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う。この通常時車両制御処理では、運転者の運転操作量Dを出力操作量Eとして車両走行部10に出力する。
【0110】
以上説明した運転支援装置51によれば、カーブにおけるアウトインアウト走行や車線変更、追い越しなどのために意図的に車線を逸脱する車線逸脱走行を行う場合にまで、操作量比m1を算出して操作量の出力に制限を加えることは適切ではないことから、車両が車線逸脱走行を行うと判断された場合には操作量比m1の算出などの学習を行わない。従って、この運転支援装置51によれば、車線逸脱走行に起因して操作量の出力に制限が加えられることで、運転者が自らの技量を誤って認識してしまうことを避けることができる。
【0111】
[第6の実施形態]
図20及び図21に示されるように、第6の実施形態に係る運転支援装置61は、第3の実施形態に係る運転支援装置31と比べて、アウトインアウト走行や追い越しなど車両が取り得る車線走行逸脱パターンに対応する操作許容範囲Aを算出する点が主に異なる。
【0112】
具体的には、運転支援装置61では、車両の取り得る車線走行逸脱パターンを予め算出し、車両が車線内を走行するパターン及び車線走行逸脱パターンの各パターンについて規範操作量B及び操作許容量Cを算出する。そして、これらの規範操作量B及び操作許容量Cから車線内を走行するパターン及び車線走行逸脱パターンに対応する操作許容範囲Aを算出する。
【0113】
図22は、車両がアウトインアウト走行を行う状況を示すための概略平面図である。図22において、車両をM、S字状道路の中央線をCn、アウトインアウト走行の進路をR、規範操作量に基づく進路をRb、道路上で操作許容範囲Aに対応する領域をFaとして示す。図21に示されるように、運転支援装置61では、操作許容範囲Aに対応する領域Faがアウトインアウト走行の進路Rを含んで形成されている。これにより、運転支援装置61では、車両Mがアウトインアウト走行を行う場合であっても、運転者の運転操作量Dが操作許容範囲Aを逸脱した場合には不適切な運転操作であると判断し、車両制御に介入することができる。
【0114】
以下、第6の実施形態に係る運転支援装置61の構成について説明する。運転支援装置61のECU62は、車両の取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出部43を有している。
【0115】
規範操作量算出部63は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、各パターンに対応した規範となる規範操作量Bを算出する。また、操作許容量算出部64は、車線逸脱走行パターン算出部43の算出した車線逸脱走行パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、安全性などの観点から許容できる操作許容量Cを算出する。
【0116】
操作許容範囲算出部65は、規範操作量算出部14の算出した規範操作量Bと操作許容量算出部15の算出した操作許容量Cとに基づいて、車両が車線内を走行するパターン及び車線走行逸脱パターンに対応する操作許容範囲Aを算出する。運転支援装置61では、車線内を走行するパターン及び車線走行逸脱パターンに対応した操作許容範囲Aを利用して運転者の運転操作量Dの逸脱の判断や車両制御が行われる。
【0117】
次に、第6の実施形態に係る運転支援装置61の動作について説明する。
【0118】
図23に示されるように、第6の実施形態に係る運転支援装置61では、まず運転者による運転操作量Dの入力が行われる(S91)。その後、走行状況検出部13は、運転操作部3や各種センサ4〜7、及びナビゲーションシステム8の出力に基づいて車両の走行状況の検出及び将来進路の算出を行う走行状況検出処理を行う(S92)。
【0119】
続いて、車線逸脱走行パターン算出部43は、走行状況検出部13の求めた車両の走行状況及び将来進路に基づいて、アウトインアウト走行や車線変更、追い越しなど車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出処理を行う(S93)。
【0120】
その後、規範操作量算出部63は、車線逸脱走行パターン算出部43が算出した車線逸脱パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、規範操作量Bを算出する規範操作量算出処理を行う(S94)。続いて、操作許容量算出部64は、車線逸脱走行パターン算出部43が算出した車線逸脱パターンと走行状況検出部13の求めた車両の走行状況及び将来進路とに基づいて、操作許容量Cを算出する操作許容量算出処理を行う(S95)。
【0121】
その後、操作許容範囲算出部65は、規範操作量算出部63の算出した規範操作量Bと操作許容量算出部64の算出した操作許容量Cとに基づいて操作許容範囲Aを算出する操作許容範囲算出処理を行う(S96)。
【0122】
次に、逸脱判断部17は、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断処理を行う(S97)。逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作量比算出部23は、当該逸脱操作量と範囲限界操作量との比である操作量比m1を算出する操作量比算出場処理を行う(S98)。また、操作量比算出場処理において、操作量比算出部23は、操作量比m1の最小値M1を記憶し、より小さな値が算出された場合には最小値M1を更新する。操作量比算出部23は、最小値M1を学習値M2として設定する。
【0123】
修正学習値算出部33は、操作量比算出部23の設定した学習値M2、学習値M2の設定後の運転時間、及び学習値M2の設定後のエンジン始動回数に基づいて、学習値M2以上の値を有する修正学習値M3を算出する修正学習値算出処理を行う(S99)。その後、車両制御部34は、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に修正学習値M3を乗じた操作量に基づいて車両を制御する逸脱時出力制御処理を行う(S100)。
【0124】
一方、逸脱判断部17が運転者の運転操作量Dは逸脱操作量ではないと判断した場合、車両制御部53は、修正学習値算出部33が修正学習値M3を算出したか否かを判断する修正操作量比算出判断処理を行う(S101)。車両制御部34は、修正学習値算出部33が修正学習値M3を算出していないと判断した場合、運転者の運転操作量Dに基づいて車両を制御する通常時車両制御処理を行う(S102)。
【0125】
車両制御部34が修正学習値算出部33は修正学習値M3を算出したと判断した場合、修正学習値算出部33は、記憶されている学習値M2と学習値M2の設定後の運転時間とに基づいて修正学習値M3を更新する修正学習値更新処理を行う(S103)。その後、車両制御部34は、運転者の運転操作量Dに修正学習値M3を乗じた操作量に基づいて車両を制御する制限時車両制御処理を行う(S104)。
【0126】
以上説明した運転支援装置61によれば、車両が車線内を走行するパターンの他、車線逸脱走行パターンにも対応した操作許容範囲Aを算出することで、運転者が操作許容範囲A内で意図的に車線逸脱走行を行うことが可能になる。しかも、車線逸脱走行中においても操作許容範囲Aから逸脱したと判断された場合には車両制御に介入されるので、車線逸脱走行中における不適切な運転操作が車両制御に反映されることを避けることができ、車両運転の安全性の向上を図ることができる。
【0127】
本発明は、上述した実施形態に限定されるものではない。例えば、本発明は、四輪自動車や二輪自動車の他、パーソナルモビリティなどの車両に対しても有効に適用できる。
【0128】
また、操作許容範囲Aの算出方法は前述したものに限られない。種々のデータを用いてより詳細な走行状況を検出し、操作許容範囲Aを高精度に算出する態様であっても良い。
【符号の説明】
【0129】
1,21,31,41,51,61…運転支援装置 3…運転操作部 4…速度センサ 5…ヨーレートセンサ 6…加速度センサ 7…レーダセンサ 8…ナビゲーションシステム 9…GPS受信部 10…車両走行部 11…地図データベース 12…交通規則データベース 13…走行状況検出部(走行状況検出手段) 14,63…規範操作量算出部(規範操作量算出手段) 15,64…操作許容量算出部(操作許容量算出手段) 16,65…操作許容範囲算出部(操作許容範囲算出手段) 17…逸脱判断部(逸脱判断手段) 18,24,34,45,53…車両制御部(車両制御手段) 23…操作量比算出部(操作量比算出手段) 33…修正学習値算出部(修正学習値算出手段) 43…車線逸脱走行パターン算出部(車線逸脱走行パターン算出手段) 44…車線逸脱走行判断部(車線逸脱走行判断手段) A…操作許容範囲 B…規範操作量 C…操作許容量 D…運転操作量 E…出力操作量 Fa…操作許容範囲に対応する領域 M…車両 R…アウトインアウト走行の進路 m1…操作量比
【特許請求の範囲】
【請求項1】
運転者による車両の運転操作を支援する運転支援装置であって、
前記車両の走行状況を検出する走行状況検出手段と、
前記走行状況検出手段の検出した走行状況に基づいて、前記車両の操作許容範囲を算出する操作許容範囲算出手段と、
前記運転者の運転操作量が前記操作許容範囲から逸脱した逸脱操作量であるか否かを判断する逸脱判断手段と、
前記逸脱判断手段が前記運転者の運転操作量は逸脱操作量であると判断した場合、前記操作許容範囲内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて前記車両を制御する車両制御手段と、
を備えることを特徴とする運転支援装置。
【請求項2】
前記逸脱判断手段が前記運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と前記範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、
前記車両制御装置は、前記操作量比算出手段が前記操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量であると判断したときには、前記範囲限界操作量を前記操作量比に応じて制限した操作量に基づいて前記車両を制御することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記逸脱判断手段が前記運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と前記範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、
前記車両制御装置は、前記操作量比算出手段が前記操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量ではないと判断したときには、当該運転操作量を前記操作量比に応じて制限した操作量に基づいて前記車両を制御することを特徴とする請求項1に記載の運転支援装置。
【請求項4】
前記操作量比算出手段が前記操作量比を算出した場合、前記車両の運転時間及び前記車両のエンジンの始動回数の少なくとも一方と前記操作量比とに基づいて、前記操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、
前記車両制御装置は、前記修正操作量比算出手段が前記修正操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量であると判断したときには、前記範囲限界操作量を前記修正操作量比に応じて制限した操作量に基づいて前記車両を制御することを特徴とする請求項2に記載の運転支援装置。
【請求項5】
前記操作量比算出手段が前記操作量比を算出した場合、前記車両の運転時間及び前記車両のエンジンの始動回数の少なくとも一方と前記操作量比とに基づいて、前記操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、
前記車両制御装置は、前記修正操作量比算出手段が前記修正操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量ではないと判断したときには、当該運転操作量を前記修正操作量比に応じて制限した制限操作量に基づいて前記車両を制御することを特徴とする請求項3に記載の運転支援装置。
【請求項6】
前記走行状況検出手段の検出した走行状況に基づいて、前記車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段と、
前記車線逸脱走行パターン算出手段の算出した前記車線逸脱走行パターンと前記運転者の運転操作量とに基づいて、前記車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断手段と、を更に備え、
前記車両制御装置は、前記車線逸脱走行判断手段が前記車両は車線逸脱走行を行うと判断した場合、前記逸脱判断手段が前記運転者の運転操作量は前記逸脱操作量であると判断したときであっても、前記運転者の運転操作量に基づいて前記車両を制御することを特徴とする請求項1〜5のうちいずれか一項に記載の運転支援装置。
【請求項7】
前記走行状況検出手段の検出した走行状況に基づいて、前記車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段を更に備え、
前記操作許容範囲算出手段は、前記車両が車線内を走行する場合の前記操作許容範囲と前記車両が前記車線逸脱走行パターンに沿って走行する場合の前記操作許容範囲とを算出することを特徴とする請求項1〜5のうちいずれか一項に記載の運転支援装置。
【請求項1】
運転者による車両の運転操作を支援する運転支援装置であって、
前記車両の走行状況を検出する走行状況検出手段と、
前記走行状況検出手段の検出した走行状況に基づいて、前記車両の操作許容範囲を算出する操作許容範囲算出手段と、
前記運転者の運転操作量が前記操作許容範囲から逸脱した逸脱操作量であるか否かを判断する逸脱判断手段と、
前記逸脱判断手段が前記運転者の運転操作量は逸脱操作量であると判断した場合、前記操作許容範囲内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて前記車両を制御する車両制御手段と、
を備えることを特徴とする運転支援装置。
【請求項2】
前記逸脱判断手段が前記運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と前記範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、
前記車両制御装置は、前記操作量比算出手段が前記操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量であると判断したときには、前記範囲限界操作量を前記操作量比に応じて制限した操作量に基づいて前記車両を制御することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記逸脱判断手段が前記運転者の運転操作量は逸脱操作量であると判断した場合、当該逸脱操作量と前記範囲限界操作量との操作量比を算出する操作量比算出手段を更に備え、
前記車両制御装置は、前記操作量比算出手段が前記操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量ではないと判断したときには、当該運転操作量を前記操作量比に応じて制限した操作量に基づいて前記車両を制御することを特徴とする請求項1に記載の運転支援装置。
【請求項4】
前記操作量比算出手段が前記操作量比を算出した場合、前記車両の運転時間及び前記車両のエンジンの始動回数の少なくとも一方と前記操作量比とに基づいて、前記操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、
前記車両制御装置は、前記修正操作量比算出手段が前記修正操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量であると判断したときには、前記範囲限界操作量を前記修正操作量比に応じて制限した操作量に基づいて前記車両を制御することを特徴とする請求項2に記載の運転支援装置。
【請求項5】
前記操作量比算出手段が前記操作量比を算出した場合、前記車両の運転時間及び前記車両のエンジンの始動回数の少なくとも一方と前記操作量比とに基づいて、前記操作量比以上の値を有する修正操作量比を算出する修正操作量比算出手段を更に備え、
前記車両制御装置は、前記修正操作量比算出手段が前記修正操作量比を算出した場合、前記逸脱操作判断手段が前記運転者の運転操作量は前記逸脱操作量ではないと判断したときには、当該運転操作量を前記修正操作量比に応じて制限した制限操作量に基づいて前記車両を制御することを特徴とする請求項3に記載の運転支援装置。
【請求項6】
前記走行状況検出手段の検出した走行状況に基づいて、前記車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段と、
前記車線逸脱走行パターン算出手段の算出した前記車線逸脱走行パターンと前記運転者の運転操作量とに基づいて、前記車両が車線逸脱走行を行うか否かを判断する車線逸脱走行判断手段と、を更に備え、
前記車両制御装置は、前記車線逸脱走行判断手段が前記車両は車線逸脱走行を行うと判断した場合、前記逸脱判断手段が前記運転者の運転操作量は前記逸脱操作量であると判断したときであっても、前記運転者の運転操作量に基づいて前記車両を制御することを特徴とする請求項1〜5のうちいずれか一項に記載の運転支援装置。
【請求項7】
前記走行状況検出手段の検出した走行状況に基づいて、前記車両が取り得る車線逸脱走行パターンを算出する車線逸脱走行パターン算出手段を更に備え、
前記操作許容範囲算出手段は、前記車両が車線内を走行する場合の前記操作許容範囲と前記車両が前記車線逸脱走行パターンに沿って走行する場合の前記操作許容範囲とを算出することを特徴とする請求項1〜5のうちいずれか一項に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2012−108653(P2012−108653A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−255917(P2010−255917)
【出願日】平成22年11月16日(2010.11.16)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月16日(2010.11.16)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]