
運転支援装置
【課題】車車間通信に対応していない車両が、急激な運転操作により回避措置をとらなければいけないような運転操作を防止し、急激な運転操作により衝突を回避しなければいけないような運転支援を防止する運転支援装置を提供する。
【解決手段】自車両の周辺情報に基づいて自車両の運転支援が実施される前に、運転支援実施通知手段が、予め周辺車両に対して実施される運転支援内容を通信手段で通知する。そして、無応答車両が存在する場合には、無応答車両は通信に対応しておらず、自車両の運転支援制御の内容を知らないと判断する。周辺に無応答車両が存在する場合には、運転支援制御手段は、無応答車両が対応できるように運転支援の内容を適切に調整する。
【解決手段】自車両の周辺情報に基づいて自車両の運転支援が実施される前に、運転支援実施通知手段が、予め周辺車両に対して実施される運転支援内容を通信手段で通知する。そして、無応答車両が存在する場合には、無応答車両は通信に対応しておらず、自車両の運転支援制御の内容を知らないと判断する。周辺に無応答車両が存在する場合には、運転支援制御手段は、無応答車両が対応できるように運転支援の内容を適切に調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、周辺車両との車車間通信の結果に基づき、運転支援内容を変更する運転支援装置に関する。
【背景技術】
【0002】
従来、路側装置等の道路情報提供装置や、他車両から情報通信により取得したインフラ情報(例えば道路状況や管制情報等)に基づいて自車両と他車両を協調制御することによって、安全性を高めるインフラ協調システムが知られている。例えば特許文献1には、自車両の前後を走行する車両の走行情報を車車間通信により取得し、自車両の走行情報と周辺道路状況から予測される挙動から、自車両と前後車両とが衝突する危険性が高いと判断した場合には、他車両に自車両の走行状態と警告を送信することにより衝突の回避制御を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−3766号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の特許文献1に記載された発明では、前後の車両が車車間通信機を搭載していることを前提としている。しかしながら、車車間通信や路車間通信の普及率はさほど高くないことから、現実の道路には協調制御を行えない車両が多く混在している。上記のような車車間通信や路車間通信に対応していない車両は、周辺車両が運転支援によりどのような制御が行われるかを知ることができないため、運転支援において対応車両に対して急激な制御が行われると、非対応車両は急激な運転操作で制御車両との衝突を回避しなければならないことがあるという問題があった。
【0005】
そこで本発明は、自車両の運転支援制御の内容を知らない他車両が、急激な運転操作により衝突を回避しなければならないような運転支援を防止する運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る運転支援装置では、自車両と他車両との間で通信を行う通信手段と、自車両の周辺情報に基づいて自車両の運転支援の内容を決定する運転支援決定手段と、運転支援を実行する運転支援実行手段と、通信手段により周辺車両に対して運転支援の実施を通知する運転支援実施通知手段と、運転支援実施通知に対する応答の有無に基づいて運転支援の内容を調整する運転支援制御手段を備える。
【0007】
このように、本発明に係る運転支援装置では、自車両の周辺情報に基づいて自車両の運転支援が実施される前に、運転支援実施通知手段が、予め周辺車両に対して実施される運転支援内容を通信手段で通知する。そして、周辺にその通知に対する応答がない車両(以下、「無応答車両」という)が存在する場合には、無応答車両は通信に対応しておらず、自車両の運転支援制御の内容を知らないと判断する。周辺に無応答車両が存在する場合には、運転支援制御手段は、無応答車両が対応できるように運転支援の内容を適切に調整する。このようにすることで、路車間通信や車車間通信に対応していないために自車両の運転支援制御の内容を知ることができない車両が急激な運転操作により自車両との衝突を回避しなければならないような運転支援を防止することができる。
【0008】
また、運転支援決定手段が決定する運転支援の内容には、少なくとも加減速の制御が含まれており、運転支援制御手段は、運転支援実施通知に対して無応答である車両が存在する場合には、運転支援による加減速の制御量を小さくすることが好適である。
【0009】
自車両が運転支援により急激な加減速を行った場合、自車両の運転支援制御の内容を知らない前後車両は急激な運転操作で自車両との衝突を回避する必要があることがある。そこで、運転支援制御手段は、運転支援実施通知に対して無応答である車両が存在する場合には、運転支援による加減速の制御量を小さくする。このようにすることで、無応答車両が制御車両に対応しやすくすることができる。
【0010】
また、通信手段は車車間通信であることが好適である。
【0011】
この発明によれば、車車間通信手段により、確実に同様の装置を備える周辺車両との通信を行うことが可能であり、上述したような運転支援をより的確に行うことができる。
【0012】
また、運転支援制御手段は、前記運転支援実施通知に対して無応答である車両が存在する場合には、運転支援実施通知に対して無応答である車両に関する情報を自車両の運転者に報知する態様とすることが好適である。
【0013】
運転支援装置において運転支援を行うにあたり、無応答車両は自車両と連携した制御を行うことができない。そこで、自車両の周辺に無応答車両が存在する場合には、自車両と連携した動きをする車両とそうでない車両を自車両の運転者に報知し、注意を促すことでより安全性を高めることができる。
【0014】
さらに、運転支援制御手段は、運転支援実施通知に対する応答を受け取った際に、応答を行った他車両と自車両の予測される距離の精度に基づいて、運転支援の内容を調整することが好適である。
【0015】
運転支援の内容は、自車両と周辺車両の距離に基づいて修正されることが望ましい。しかしながら、自車両と周辺車両の距離の計測精度が悪い場合には、その距離情報に基づいて運転支援内容を決定すると支援内容の適切さが低くなることがある。そのため、距離の計測精度が悪いと判断される場合には、運転支援の内容を調整することで、より周辺車両が適切に対応できるような運転支援を提供することができる。
【発明の効果】
【0016】
本発明によれば、自車両の運転支援制御の内容を知らない他車両が、急激な運転操作により衝突を回避しなければならないような運転支援を防止する運転支援装置を提供することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第1の実施形態の運転支援装置が適用される状況を示す平面図である。
【図2】本発明の運転支援装置のブロック構成図である。
【図3】本発明の第1の実施形態に係る運転支援装置の動作についてのフローチャートである。
【図4】運転支援の制御量を調整する前の減速制御と調整後の減速制御を表すグラフである。
【図5】無応答車両に関する情報が表示装置に表示されている例である。
【図6】本発明の第2の実施形態の運転支援装置が適用される状況を示す平面図である。
【図7】本発明の第2の実施形態に係る運転支援装置の動作についてのフローチャートである。
【発明を実施するための形態】
【0018】
以下、添付図面を参照して、本発明の好適な実施形態について詳細に説明する。なお、以下の説明において、同一又は相当要素には同一符号を付し、重複する説明を省略する。
【0019】
(第1の実施の形態)
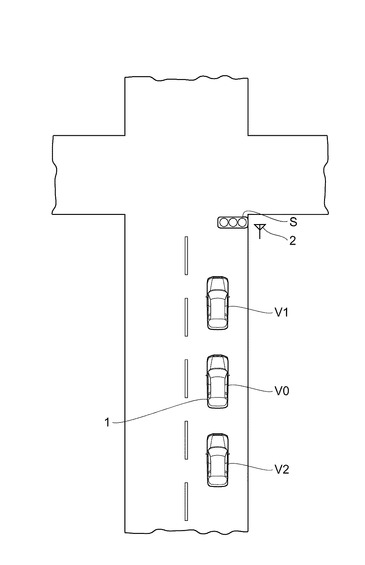
図1は、本発明の第1の実施形態の運転支援装置が適用される状況を示す平面図である。以下の説明では、図1に示すように、運転支援装置1を搭載している制御車両V0が、信号機Sが設けられている交差点に向かって走行している状況を想定する。また、制御車両V0の前後には、制御車両V0の前方を走行する前方車両V1と後方を走行する後方車両V2が同一車線上を交差点に向かって走行しているものとする。さらに、交差点付近の路側には、信号機Sの点灯状態や交差点周辺を走行する車両の走行状態を検出して送信する路側装置2が設けられているものとする。
【0020】
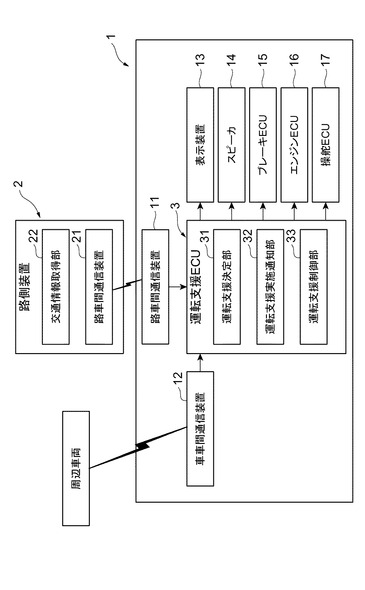
図2は、本発明の運転支援装置の構成を示すブロック図である。本実施形態に係る運転支援装置1は、制御車両V0等の自動車に搭載される。この運転支援装置1は、運転支援ECU(Electronic Control Unit)3と、路車間通信装置11と、車車間通信装置12と、表示装置13と、スピーカ14と、ブレーキECU15と、エンジンECU16と、操舵ECU17とを備えている。
【0021】
運転支援装置1は、路車間通信装置11と路車間通信装置21との間で行われる無線通信により、路側装置2と相互に通信を行う。路側装置2は、路車間通信装置21と交差点の信号情報や管制情報等を収集する交通情報取得部22を備えている。路側装置2は、収集した各種情報を路車間通信装置21により周辺車両に対して送信する。
【0022】
運転支援ECU3には、制御車両V0の外部との通信を行うための車載通信装置である路車間通信装置11と車車間通信装置12が接続されている。
【0023】
路車間通信装置11は、通信アンテナ等を備えており、路側装置2のような道路情報提供装置と通信するための無線通信機である。路車間通信装置11では、路側装置2に対して制御車両V0からの路車間信号を送信するとともに、路側装置2からの路車間信号を受信する。路車間通信装置11では、運転支援ECU3から入力した各種情報を変調し、その変調した路車間信号を通信アンテナより送信する。また、通信アンテナで受信した路側装置2からの路車間信号を復調し、その復調した道路情報を運転支援ECU3に出力する。
【0024】
車車間通信装置12は、通信アンテナ等を備えており、制御車両V0と前方車両V1や後方車両V2のような周辺車両同士で通信するための無線通信機である。車車間通信装置12は、所定距離以内に存在する前方車両V1および後方車両V2等の周辺車両に対して制御車両V0からの車車間信号を送信するとともに、所定距離以内に存在する周辺車両からの車車間信号を受信する。車車間通信装置12では、運転支援ECU3から入力した各種情報を変調し、その変調した車車間信号を通信アンテナより送信する。また、車車間通信装置12では、通信アンテナで受信した周辺車両からの車車間信号を復調し、その復調した周辺車両の情報を運転支援ECU3に出力する。
【0025】
さらに、運転支援ECU3には、表示装置13、スピーカ14、ブレーキECU15、エンジンECU16、操舵ECU17が接続されている。
【0026】
表示装置13は、例えば、車両内に設置される一般的なディスプレイであり、運転支援ECU3から出力される各種情報を表示し、運転者に報知する。表示装置13は一般的なディスプレイに限られず、ヘッドアップディスプレイ等でもよい。また、スピーカ14も車両内に設置され、運転支援ECU3から出力される各種情報を音声によって、運転者に報知する。
【0027】
ブレーキECU15は運転支援ECU3からの出力信号に従って、アクチュエータであるブレーキを制御する。同様に、エンジンECU16、操舵ECU17は、運転支援ECU3からの出力信号に従って、それぞれスロットル開度、ステアリングを制御する。
【0028】
運転支援ECU3は、例えばCPU、ROM、及びRAM等から構成され、運転支援決定部31と、運転支援実施通知部32と、運転支援制御部33を有している。運転支援決定部31は、制御車両V0の走行状態や路車間通信装置11および車車間通信装置12から取得したインフラ情報を総合的に判断し、適切な運転支援を決定する。決定された運転支援の内容は運転支援実施通知部32に送信される。運転支援実施通知部32は、運転支援決定部31により決定された運転支援の内容を車車間通信装置12に送り、車車間通信装置12は運転支援の内容を前方車両V1および後方車両V2に通知する。運転支援実施通知部32が通知した運転支援の内容は運転支援制御部33にも送られる。
【0029】
また、運転支援制御部33は、運転支援実施通知部32が通知した運転支援の内容と運転支援実施通知に対する前方車両V1および後方車両V2からの応答に基づいて、運転支援決定部31により決定された運転支援の内容を適切に調整する。
【0030】
前方車両V1および後方車両V2から運転支援内容の実施許可の応答があった場合には、運転支援制御部33は、運転支援決定部31が決定した運転支援を実行することを決定する。これに対して、前方車両V1と後方車両V2が運転支援の実行を許可しない旨の応答を行った場合には、運転支援制御部33は運転支援の制御を行わないことを決定する。前方車両V1や後方車両V2から運転支援実施通知に対する応答がない場合には、無回答車両が急激な運転操作で制御車両V0との衝突を回避する必要がないように、運転支援の内容を適切に調整する。運転支援制御部33は、決定された運転支援における制御情報を表示装置13、スピーカ14、ブレーキECU15、エンジンECU16、操舵ECU17に出力する。
【0031】
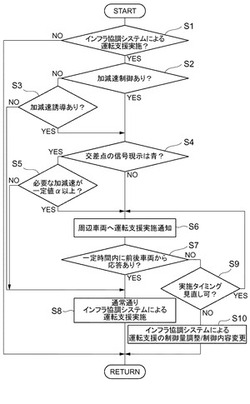
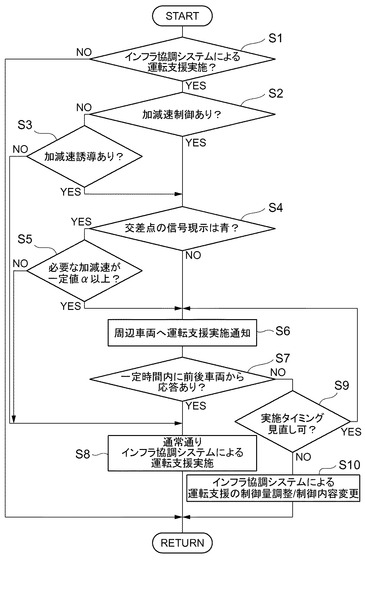
次に、本実施形態に係る運転支援装置1の動作について説明する。図3は、運転支援装置1による運転支援の動作を示すフローチャートである。ここで本実施形態では、図1に示すような道路状況において、加減速の制御を含む運転支援が行われた場合の運転支援を調整する手順について説明する。
【0032】
制御車両V0に搭載されている運転支援装置1は、路車間通信や車車間通信によりインフラ情報が送信されていないか定期的に監視をしている。運転支援装置1はインフラ情報を受信すると、図3に示す一連の処理が開始される。
【0033】
制御車両V0がインフラ情報を受信すると、運転支援決定部31は、制御車両V0において、インフラ協調システムによる運転支援を実施するか否かを判断する(S1)。運転支援を実施しないと判断した場合には、運転支援の一連の処理を終了する。
【0034】
運転支援を実施すると判断した場合には運転支援の内容を決定する。続いて、決定された運転支援に加減速制御が含まれるか否かを判断する(S2)。運転支援に加減速制御が含まれない場合は、運転者に対して加減速を誘導する制御が含まれるか否かを判断する(S3)。運転支援に加減速誘導が含まれないと判断した場合には、運転支援決定部31が決定した運転支援を実行しても前方車両V1および後方車両V2に影響を与えないと考え、ステップS8に処理を移行する。
【0035】
運転支援に加減速誘導が含まれると判断した場合、もしくはステップS2で加減速制御が含まれると判断した場合には、続いて、対象交差点の信号機Sの信号現示が青であるか否かを判断する(S4)。ここで、信号機Sの信号現示は路側装置2から路車間通信により取得される。信号機Sの信号現示が青の場合、運転支援により実施される加減速制御もくしは加減速誘導の加減速が一定値α以上であるか否かを判断する(S5)。加減速が一定値αより小さい場合には、制御車両V0により加減速の制御が行われたとしても、前方車両V1もしくは後方車両V2は急激な運転操作をしなくても衝突を回避することができると考え、ステップS8に処理を移行する。
【0036】
運転支援の加減速が一定値α以上であった場合には、運転支援の内容をそのまま実行すると、前方車両V1および後方車両V2は制御車両V0に急激な運転操作で対応しなければならない場合があると考えられることから、運転支援実施通知を行う(S6)。また、信号機Sの信号現示が青以外の場合にもステップS6に処理を移行する。
【0037】
運転支援実施通知では、制御車両V0は、車車間通信装置12により前方車両V1および後方車両V2に対して実施しようとする運転支援の内容を通知する。その後、一定時間内に前方車両V1および後方車両V2から応答があるか否かを判断する(S7)。一定時間内に応答があった場合には、前方車両V1もしくは後方車両V2は車車間通信に対応していると考えられることから、通常通りインフラ協調システムによる運転支援が実施される(S8)。
【0038】
より具体的には、前方車両V1および後方車両V2から運転支援内容の実施許可の応答があった場合には、運転支援制御部33は、運転支援決定部31が決定した運転支援をそのまま実行することを決定する。これに対して、前方車両V1と後方車両V2のいずれかが運転支援の実行を許可しない旨の応答を行った場合には、運転支援制御部33は運転支援の制御を行わないことを決定する。
【0039】
路車間通信により制御車両V0の前後に前方車両V1および後方車両V2が存在していることを認識しているにもかかわらず、一定時間以内に応答がない場合には、前方車両V1もしくは後方車両V2は車車間通信不能状態であると考えられる。そのため、自車の走行状態およびインフラ情報に基づいて運転支援の実施タイミングの見直しが可能であるか否かを判断する(S9)。
【0040】
運転支援の実施タイミングを変更することが可能であると判断した場合には、再度運転支援実施通知を行う(S6)。一方、運転支援の実施タイミングを見直すことができない場合には、インフラ協調システムによる運転支援の制御量の調整を行うか、制御内容を変更して実施する(S10)。こうして一連の運転支援の処理を終了する。
【0041】
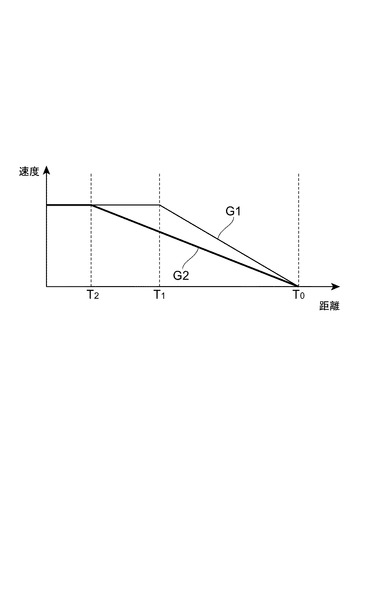
次に図4を用いて、運転支援の制御量の調整の例を説明する。図4は、運転支援の制御量を調整する前の減速制御と調整後の減速制御の例を表すグラフである。このグラフは減速制御における、制御車両の速度と距離の関係を表している。仮に運転支援決定部31は、グラフG1のように現地点から距離T0の地点において車両を停止させるために、距離T1の地点においてブレーキ制御を開始する運転支援を決定したとする。
【0042】
ここで、運転支援通知に対して、後方車両V2からの応答がない場合には、運転支援制御部33は、例えばグラフG2のようにブレーキ制御の開始を距離T2の地点に変更する。ブレーキ制御の開始地点を、従来のT1よりも手前のT2に変更することで減速度が小さくなることから、後方車両V2はグラフG1のようなブレーキ制御と比較して急ブレーキをかけずに制御車両V0を回避することができる。上記のようにステップS10おいて運転支援の制御量を適切に調整することにより前方車両V1および後方車両V2が急激な運転操作を行わなくても衝突を回避することが可能になる。
【0043】
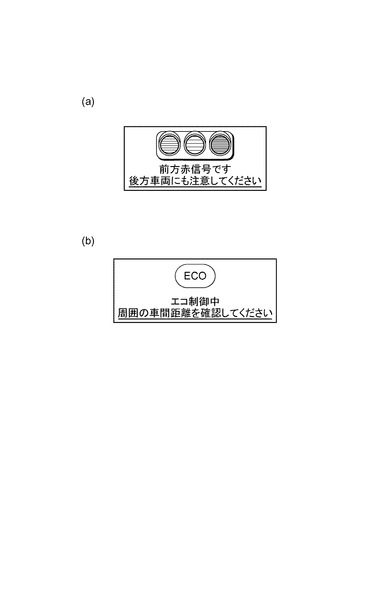
次に、運転支援の内容を変更する例を説明する。図5は無応答車両に関する情報が表示装置13に表示されている例である。図5で下線部分は、運転支援が調整される前の通常状態では表示されない。図5(a)は、信号機Sが赤信号であることを表示装置13に表示し、制御車両V0の運転者に報知している様子を示している。ここで、後方車両V2が、運転支援実施通知に対して無応答の場合には、従来の表示に加えて下線で示したように「後方車両にも注意してください」という表示が追加する。この表示を追加することにより、運転者に注意喚起をする。
【0044】
図5(b)は、燃費を向上させる運転支援であるエコ制御が行われていることを表示装置13に表示し、運転者に報知している様子を示している。ここで、周辺車両が運転支援実施通知に対して無応答の場合には、従来の表示に加えて下線で示すように「周囲の車間距離を確認してください」という注意を表示を追加することにより、運転者に注意喚起する。このように、応答をしない車両の存在を運転者に報知し、運転者に注意を促すことで車車間通信に対応していない車両との衝突を防止することができる。運転支援の内容の変更は、表示内容を変更する態様に限られず、ハザードランプを点滅させる制御を行うことにより後続車両に、減速制御が行われることを知らせてもよい。
【0045】
本実施形態における運転支援装置では、加減速制御を含む運転支援を実施する前に、予め前後車両に対して実施される運転支援の内容を車車間通信で通知する。そして、その通知に対して無応答の車両が存在する場合には、その車両は車車間通信に対応していないと判断する。周辺に無応答車両存在する場合には、予め運転支援の内容を通知されていない他車両が対応できるように、運転支援の内容を適切に調整する。このような態様にすることで、自車両の運転支援制御の内容を知らない車両が急激な運転操作により衝突を回避しなければならないような運転支援を防止することができる。
【0046】
(第2の実施の形態)
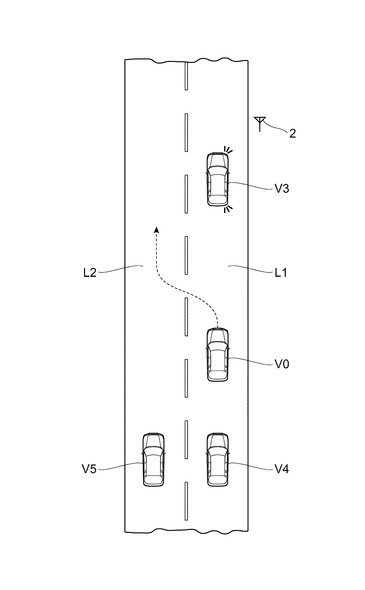
次に、本発明の第2の実施形態について説明する。図6は、本発明の第2の実施形態の運転支援装置が適用される状況を示す平面図である。以下の説明では、図6に示すように、運転支援装置1を搭載している制御車両V0が、片側2車線道路において、前方の右折車両V3を避けるために右車線L1から左車線L2へ車線変更しようとしている状況を想定する。また、制御車両V0の後方には、車線L1を走行する後方車両V4と車線L2を走行する後方車両V5が存在しているものとする。また、路側には、走行する車両の走行状態等の各種情報を検出して送信する路側装置2が設けられている。
【0047】
制御車両V0に搭載されている運転支援装置1は、第1の実施の形態で説明したものと同様の構成となっているため、再度の説明は省略する。
【0048】
次に、本実施形態に係る駐車支援装置の動作について説明する。図7は、運転支援装置1による運転支援の動作を示すフローチャートである。ここで本実施形態では、図6に示すような道路状況において、右左折の制御を含む運転支援が行われた場合における、運転支援を調整する手順について説明する。
【0049】
制御車両V0に搭載されている運転支援装置1は、路車間通信や車車間通信によりインフラ情報が送信されていないか定期的に監視をしている。運転支援装置1はインフラ情報を受信すると、図7に示す一連の処理が開始される。
【0050】
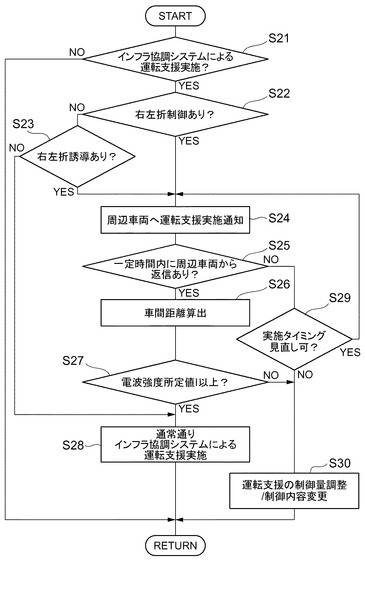
制御車両V0がインフラ情報を受信すると、運転支援決定部31は、制御車両V0において、インフラ協調システムによる運転支援を実施するか否かを決定する(S21)。運転支援を実施しないと判断した場合には、運転支援の一連の処理を終了する。
【0051】
運転支援を実施すると判断した場合には、運転支援の内容を決定する。続いて、決定された運転支援に右左折制御が含まれるか否かを判断する(S22)。運転支援に右左折制御が含まれない場合は、運転者に対して右左折を誘導する制御が含まれるか否かを判断する(S23)。運転支援に右左折誘導が含まれないと判断した場合には、運転支援決定部31が決定した運転支援を実行しても周辺車両V3,V4,V5に対して影響を与えないと考え、ステップS28に処理を移行する。
【0052】
運転支援に右左折誘導が含まれると判断した場合、もしくはステップS22で右左折制御が含まれると判断した場合には運転支援実施通知部32が、車車間通信装置12により周辺車両V3,V4,V5に対して実行しようとする運転支援の内容を通知する(S24)。続いて、一定時間内に周辺車両V3,V4,V5から運転支援実施通知に対する応答があるか否かを判断する(S25)。一定時間内に周辺車両V3,V4,V5から応答がなかった場合にはステップS29の処理に移行する。
【0053】
その結果、周辺車両V3,V4,V5から運転支援実施通知に対する応答があった場合には、車間距離の算出が行われる(S26)。車間距離は、車車間通信で得られる送信時刻と受信時刻の時間差から求められる。すなわち、送信時刻と受信時刻の時間差が大きいときは車間距離が大きく、送信時刻と受信時刻の時間差が小さいと車間距離が小さく算出される。さらに、制御車両V0と周辺車両V3,V4,V5との進行方位角、位置情報から周辺車両V3,V4,V5の存在する方位を算出する。
【0054】
続いて、車車間通信の電波強度が所定値I以上であるか否かの判断を行う(S27)。電波強度が所定値I以上である場合には、算出された車間距離が正確であると考えられることから、通常通りインフラ協調システムによる運転支援が実施される(S28)。一方、ここでは、路車間通信により取得したインフラ情報に加えて、制御車両V0と周辺車両V3,V4,V5との車間距離に基づいて運転支援が行われる。車車間通信の電波強度が所定値Iよりも小さい場合には、車車間通信の電波状態が悪く、算出された車間距離は信頼性が低いと考え、ステップS30の処理に移行する。
【0055】
路車間通信により制御車両V0の周辺に周辺車両V3,V4,V5の存在を認識しているにもかかわらず、一定時間以内に周辺車両V3,V4,V5から応答がない場合には、無応答車両は車車間通信不能状態であると考えられる。その場合には、自車の走行状態およびインフラ情報から運転支援の実施タイミングの見直しが可能か否かを判断する(S29)。
【0056】
運転支援の実施タイミングを変更することが可能であると判断した場合には、再度運転支援実施通知を行う(S24)。運転支援の実施タイミングを見直すことができない場合もしくは電波強度が所定値Iより小さい場合は、インフラ協調システムによる運転支援の制御量の調整を行うか、制御内容を変更して実施する(S30)。
【0057】
例えば、図6において、制御車両V0が前方の右折車両V3を回避するために車線L1から車線L2へ車線変更するための運転支援が行われる場合、制御車両V0から周辺車両V3,V4,V5に対して車線変更を行う旨の運転支援実施通知が行われる。これに対して、車両V3からは一定時間内に応答がなく、後方車両V4とV5は、運転支援の実行を許可する旨の応答を行った場合を想定する。また、後方車両V4からは所定値I以上の電波強度で応答があったものの、後方車両V5からの応答の電波強度は所定値Iよりも小さかったもとする。この場合、制御車両V0は、後方車両V5との車間距離が不明であるため、運転支援の実施タイミングを変更し、後方車両V5が通過した後に車線変更を実施する。さらに、制御車両V0は、前方車両V3が車車間通信に対応していないため、前方車両V3に注意が必要であることを表示装置13に表示することで運転者に報知する。こうして一連の運転支援の処理を終了する。
【0058】
本実施形態における運転支援装置は、右左折制御を含む運転支援を実施する前に、あらかじめ周辺車両に対して実施される運転支援の内容を車車間通信で通知する。その通知に対して応答がない車両が存在する場合には、運転支援における制御量の調整や運転支援の内容を変更することにより、周辺車両が急激な運転操作により衝突を回避しなければいけないような運転支援を防止することができる。さらに、応答があった場合でも、制御車両と周辺車両の車間距離の計測精度が悪い場合には運転支援における制御量の調整や運転支援の内容を変更する。このような態様にすることで、計測した距離の誤りが原因で発生する制御車両と周辺車両の衝突を防止でき、より安全性の高い運転支援を行うことができる。
【0059】
なお、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。例えば、本実施形態では、車車間通信の送信、受信時刻により車間距離を測定しているが、ミリ波レーザや車載カメラ、路側感知器等の、より計測精度の高い測定方法を用いてもよい。また、運転支援はインフラ情報に基づいて決定しているが、自車両に設置された各種センサから判断された情報に基づいて決定されてもよい。また本実施形態では車両間の通信手段として車車間通信装置を用いたが、その代わりに運転支援装置に接続された携帯電話や路車間通信装置等により、中継点を利用して車両間で通信を行ってもよい。
【0060】
第2の実施形態では、運転支援に右左折制御が含まれる場合に、計測された車間距離の精度に基づいて運転支援の内容を調整する運転支援装置について説明したが、このような運転支援は右左折制御が含まれる場合に限られない。例えば、第1の実施形態のように加減速制御を含む運転支援においても、車間距離の計測を行い、計測された車間距離の精度に基づいて運転支援の内容を調整してもよい。
【符号の説明】
【0061】
1…運転支援装置、2…路側装置、3…運転支援ECU、11…路車間通信装置、12…車車間通信装置、13…表示装置、14…スピーカ、15…ブレーキECU、16…エンジンECU、17…操舵ECU、31…運転支援決定部、32…運転支援実施通知部、33…運転支援制御部。
【技術分野】
【0001】
本発明は、周辺車両との車車間通信の結果に基づき、運転支援内容を変更する運転支援装置に関する。
【背景技術】
【0002】
従来、路側装置等の道路情報提供装置や、他車両から情報通信により取得したインフラ情報(例えば道路状況や管制情報等)に基づいて自車両と他車両を協調制御することによって、安全性を高めるインフラ協調システムが知られている。例えば特許文献1には、自車両の前後を走行する車両の走行情報を車車間通信により取得し、自車両の走行情報と周辺道路状況から予測される挙動から、自車両と前後車両とが衝突する危険性が高いと判断した場合には、他車両に自車両の走行状態と警告を送信することにより衝突の回避制御を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−3766号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の特許文献1に記載された発明では、前後の車両が車車間通信機を搭載していることを前提としている。しかしながら、車車間通信や路車間通信の普及率はさほど高くないことから、現実の道路には協調制御を行えない車両が多く混在している。上記のような車車間通信や路車間通信に対応していない車両は、周辺車両が運転支援によりどのような制御が行われるかを知ることができないため、運転支援において対応車両に対して急激な制御が行われると、非対応車両は急激な運転操作で制御車両との衝突を回避しなければならないことがあるという問題があった。
【0005】
そこで本発明は、自車両の運転支援制御の内容を知らない他車両が、急激な運転操作により衝突を回避しなければならないような運転支援を防止する運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る運転支援装置では、自車両と他車両との間で通信を行う通信手段と、自車両の周辺情報に基づいて自車両の運転支援の内容を決定する運転支援決定手段と、運転支援を実行する運転支援実行手段と、通信手段により周辺車両に対して運転支援の実施を通知する運転支援実施通知手段と、運転支援実施通知に対する応答の有無に基づいて運転支援の内容を調整する運転支援制御手段を備える。
【0007】
このように、本発明に係る運転支援装置では、自車両の周辺情報に基づいて自車両の運転支援が実施される前に、運転支援実施通知手段が、予め周辺車両に対して実施される運転支援内容を通信手段で通知する。そして、周辺にその通知に対する応答がない車両(以下、「無応答車両」という)が存在する場合には、無応答車両は通信に対応しておらず、自車両の運転支援制御の内容を知らないと判断する。周辺に無応答車両が存在する場合には、運転支援制御手段は、無応答車両が対応できるように運転支援の内容を適切に調整する。このようにすることで、路車間通信や車車間通信に対応していないために自車両の運転支援制御の内容を知ることができない車両が急激な運転操作により自車両との衝突を回避しなければならないような運転支援を防止することができる。
【0008】
また、運転支援決定手段が決定する運転支援の内容には、少なくとも加減速の制御が含まれており、運転支援制御手段は、運転支援実施通知に対して無応答である車両が存在する場合には、運転支援による加減速の制御量を小さくすることが好適である。
【0009】
自車両が運転支援により急激な加減速を行った場合、自車両の運転支援制御の内容を知らない前後車両は急激な運転操作で自車両との衝突を回避する必要があることがある。そこで、運転支援制御手段は、運転支援実施通知に対して無応答である車両が存在する場合には、運転支援による加減速の制御量を小さくする。このようにすることで、無応答車両が制御車両に対応しやすくすることができる。
【0010】
また、通信手段は車車間通信であることが好適である。
【0011】
この発明によれば、車車間通信手段により、確実に同様の装置を備える周辺車両との通信を行うことが可能であり、上述したような運転支援をより的確に行うことができる。
【0012】
また、運転支援制御手段は、前記運転支援実施通知に対して無応答である車両が存在する場合には、運転支援実施通知に対して無応答である車両に関する情報を自車両の運転者に報知する態様とすることが好適である。
【0013】
運転支援装置において運転支援を行うにあたり、無応答車両は自車両と連携した制御を行うことができない。そこで、自車両の周辺に無応答車両が存在する場合には、自車両と連携した動きをする車両とそうでない車両を自車両の運転者に報知し、注意を促すことでより安全性を高めることができる。
【0014】
さらに、運転支援制御手段は、運転支援実施通知に対する応答を受け取った際に、応答を行った他車両と自車両の予測される距離の精度に基づいて、運転支援の内容を調整することが好適である。
【0015】
運転支援の内容は、自車両と周辺車両の距離に基づいて修正されることが望ましい。しかしながら、自車両と周辺車両の距離の計測精度が悪い場合には、その距離情報に基づいて運転支援内容を決定すると支援内容の適切さが低くなることがある。そのため、距離の計測精度が悪いと判断される場合には、運転支援の内容を調整することで、より周辺車両が適切に対応できるような運転支援を提供することができる。
【発明の効果】
【0016】
本発明によれば、自車両の運転支援制御の内容を知らない他車両が、急激な運転操作により衝突を回避しなければならないような運転支援を防止する運転支援装置を提供することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第1の実施形態の運転支援装置が適用される状況を示す平面図である。
【図2】本発明の運転支援装置のブロック構成図である。
【図3】本発明の第1の実施形態に係る運転支援装置の動作についてのフローチャートである。
【図4】運転支援の制御量を調整する前の減速制御と調整後の減速制御を表すグラフである。
【図5】無応答車両に関する情報が表示装置に表示されている例である。
【図6】本発明の第2の実施形態の運転支援装置が適用される状況を示す平面図である。
【図7】本発明の第2の実施形態に係る運転支援装置の動作についてのフローチャートである。
【発明を実施するための形態】
【0018】
以下、添付図面を参照して、本発明の好適な実施形態について詳細に説明する。なお、以下の説明において、同一又は相当要素には同一符号を付し、重複する説明を省略する。
【0019】
(第1の実施の形態)
図1は、本発明の第1の実施形態の運転支援装置が適用される状況を示す平面図である。以下の説明では、図1に示すように、運転支援装置1を搭載している制御車両V0が、信号機Sが設けられている交差点に向かって走行している状況を想定する。また、制御車両V0の前後には、制御車両V0の前方を走行する前方車両V1と後方を走行する後方車両V2が同一車線上を交差点に向かって走行しているものとする。さらに、交差点付近の路側には、信号機Sの点灯状態や交差点周辺を走行する車両の走行状態を検出して送信する路側装置2が設けられているものとする。
【0020】
図2は、本発明の運転支援装置の構成を示すブロック図である。本実施形態に係る運転支援装置1は、制御車両V0等の自動車に搭載される。この運転支援装置1は、運転支援ECU(Electronic Control Unit)3と、路車間通信装置11と、車車間通信装置12と、表示装置13と、スピーカ14と、ブレーキECU15と、エンジンECU16と、操舵ECU17とを備えている。
【0021】
運転支援装置1は、路車間通信装置11と路車間通信装置21との間で行われる無線通信により、路側装置2と相互に通信を行う。路側装置2は、路車間通信装置21と交差点の信号情報や管制情報等を収集する交通情報取得部22を備えている。路側装置2は、収集した各種情報を路車間通信装置21により周辺車両に対して送信する。
【0022】
運転支援ECU3には、制御車両V0の外部との通信を行うための車載通信装置である路車間通信装置11と車車間通信装置12が接続されている。
【0023】
路車間通信装置11は、通信アンテナ等を備えており、路側装置2のような道路情報提供装置と通信するための無線通信機である。路車間通信装置11では、路側装置2に対して制御車両V0からの路車間信号を送信するとともに、路側装置2からの路車間信号を受信する。路車間通信装置11では、運転支援ECU3から入力した各種情報を変調し、その変調した路車間信号を通信アンテナより送信する。また、通信アンテナで受信した路側装置2からの路車間信号を復調し、その復調した道路情報を運転支援ECU3に出力する。
【0024】
車車間通信装置12は、通信アンテナ等を備えており、制御車両V0と前方車両V1や後方車両V2のような周辺車両同士で通信するための無線通信機である。車車間通信装置12は、所定距離以内に存在する前方車両V1および後方車両V2等の周辺車両に対して制御車両V0からの車車間信号を送信するとともに、所定距離以内に存在する周辺車両からの車車間信号を受信する。車車間通信装置12では、運転支援ECU3から入力した各種情報を変調し、その変調した車車間信号を通信アンテナより送信する。また、車車間通信装置12では、通信アンテナで受信した周辺車両からの車車間信号を復調し、その復調した周辺車両の情報を運転支援ECU3に出力する。
【0025】
さらに、運転支援ECU3には、表示装置13、スピーカ14、ブレーキECU15、エンジンECU16、操舵ECU17が接続されている。
【0026】
表示装置13は、例えば、車両内に設置される一般的なディスプレイであり、運転支援ECU3から出力される各種情報を表示し、運転者に報知する。表示装置13は一般的なディスプレイに限られず、ヘッドアップディスプレイ等でもよい。また、スピーカ14も車両内に設置され、運転支援ECU3から出力される各種情報を音声によって、運転者に報知する。
【0027】
ブレーキECU15は運転支援ECU3からの出力信号に従って、アクチュエータであるブレーキを制御する。同様に、エンジンECU16、操舵ECU17は、運転支援ECU3からの出力信号に従って、それぞれスロットル開度、ステアリングを制御する。
【0028】
運転支援ECU3は、例えばCPU、ROM、及びRAM等から構成され、運転支援決定部31と、運転支援実施通知部32と、運転支援制御部33を有している。運転支援決定部31は、制御車両V0の走行状態や路車間通信装置11および車車間通信装置12から取得したインフラ情報を総合的に判断し、適切な運転支援を決定する。決定された運転支援の内容は運転支援実施通知部32に送信される。運転支援実施通知部32は、運転支援決定部31により決定された運転支援の内容を車車間通信装置12に送り、車車間通信装置12は運転支援の内容を前方車両V1および後方車両V2に通知する。運転支援実施通知部32が通知した運転支援の内容は運転支援制御部33にも送られる。
【0029】
また、運転支援制御部33は、運転支援実施通知部32が通知した運転支援の内容と運転支援実施通知に対する前方車両V1および後方車両V2からの応答に基づいて、運転支援決定部31により決定された運転支援の内容を適切に調整する。
【0030】
前方車両V1および後方車両V2から運転支援内容の実施許可の応答があった場合には、運転支援制御部33は、運転支援決定部31が決定した運転支援を実行することを決定する。これに対して、前方車両V1と後方車両V2が運転支援の実行を許可しない旨の応答を行った場合には、運転支援制御部33は運転支援の制御を行わないことを決定する。前方車両V1や後方車両V2から運転支援実施通知に対する応答がない場合には、無回答車両が急激な運転操作で制御車両V0との衝突を回避する必要がないように、運転支援の内容を適切に調整する。運転支援制御部33は、決定された運転支援における制御情報を表示装置13、スピーカ14、ブレーキECU15、エンジンECU16、操舵ECU17に出力する。
【0031】
次に、本実施形態に係る運転支援装置1の動作について説明する。図3は、運転支援装置1による運転支援の動作を示すフローチャートである。ここで本実施形態では、図1に示すような道路状況において、加減速の制御を含む運転支援が行われた場合の運転支援を調整する手順について説明する。
【0032】
制御車両V0に搭載されている運転支援装置1は、路車間通信や車車間通信によりインフラ情報が送信されていないか定期的に監視をしている。運転支援装置1はインフラ情報を受信すると、図3に示す一連の処理が開始される。
【0033】
制御車両V0がインフラ情報を受信すると、運転支援決定部31は、制御車両V0において、インフラ協調システムによる運転支援を実施するか否かを判断する(S1)。運転支援を実施しないと判断した場合には、運転支援の一連の処理を終了する。
【0034】
運転支援を実施すると判断した場合には運転支援の内容を決定する。続いて、決定された運転支援に加減速制御が含まれるか否かを判断する(S2)。運転支援に加減速制御が含まれない場合は、運転者に対して加減速を誘導する制御が含まれるか否かを判断する(S3)。運転支援に加減速誘導が含まれないと判断した場合には、運転支援決定部31が決定した運転支援を実行しても前方車両V1および後方車両V2に影響を与えないと考え、ステップS8に処理を移行する。
【0035】
運転支援に加減速誘導が含まれると判断した場合、もしくはステップS2で加減速制御が含まれると判断した場合には、続いて、対象交差点の信号機Sの信号現示が青であるか否かを判断する(S4)。ここで、信号機Sの信号現示は路側装置2から路車間通信により取得される。信号機Sの信号現示が青の場合、運転支援により実施される加減速制御もくしは加減速誘導の加減速が一定値α以上であるか否かを判断する(S5)。加減速が一定値αより小さい場合には、制御車両V0により加減速の制御が行われたとしても、前方車両V1もしくは後方車両V2は急激な運転操作をしなくても衝突を回避することができると考え、ステップS8に処理を移行する。
【0036】
運転支援の加減速が一定値α以上であった場合には、運転支援の内容をそのまま実行すると、前方車両V1および後方車両V2は制御車両V0に急激な運転操作で対応しなければならない場合があると考えられることから、運転支援実施通知を行う(S6)。また、信号機Sの信号現示が青以外の場合にもステップS6に処理を移行する。
【0037】
運転支援実施通知では、制御車両V0は、車車間通信装置12により前方車両V1および後方車両V2に対して実施しようとする運転支援の内容を通知する。その後、一定時間内に前方車両V1および後方車両V2から応答があるか否かを判断する(S7)。一定時間内に応答があった場合には、前方車両V1もしくは後方車両V2は車車間通信に対応していると考えられることから、通常通りインフラ協調システムによる運転支援が実施される(S8)。
【0038】
より具体的には、前方車両V1および後方車両V2から運転支援内容の実施許可の応答があった場合には、運転支援制御部33は、運転支援決定部31が決定した運転支援をそのまま実行することを決定する。これに対して、前方車両V1と後方車両V2のいずれかが運転支援の実行を許可しない旨の応答を行った場合には、運転支援制御部33は運転支援の制御を行わないことを決定する。
【0039】
路車間通信により制御車両V0の前後に前方車両V1および後方車両V2が存在していることを認識しているにもかかわらず、一定時間以内に応答がない場合には、前方車両V1もしくは後方車両V2は車車間通信不能状態であると考えられる。そのため、自車の走行状態およびインフラ情報に基づいて運転支援の実施タイミングの見直しが可能であるか否かを判断する(S9)。
【0040】
運転支援の実施タイミングを変更することが可能であると判断した場合には、再度運転支援実施通知を行う(S6)。一方、運転支援の実施タイミングを見直すことができない場合には、インフラ協調システムによる運転支援の制御量の調整を行うか、制御内容を変更して実施する(S10)。こうして一連の運転支援の処理を終了する。
【0041】
次に図4を用いて、運転支援の制御量の調整の例を説明する。図4は、運転支援の制御量を調整する前の減速制御と調整後の減速制御の例を表すグラフである。このグラフは減速制御における、制御車両の速度と距離の関係を表している。仮に運転支援決定部31は、グラフG1のように現地点から距離T0の地点において車両を停止させるために、距離T1の地点においてブレーキ制御を開始する運転支援を決定したとする。
【0042】
ここで、運転支援通知に対して、後方車両V2からの応答がない場合には、運転支援制御部33は、例えばグラフG2のようにブレーキ制御の開始を距離T2の地点に変更する。ブレーキ制御の開始地点を、従来のT1よりも手前のT2に変更することで減速度が小さくなることから、後方車両V2はグラフG1のようなブレーキ制御と比較して急ブレーキをかけずに制御車両V0を回避することができる。上記のようにステップS10おいて運転支援の制御量を適切に調整することにより前方車両V1および後方車両V2が急激な運転操作を行わなくても衝突を回避することが可能になる。
【0043】
次に、運転支援の内容を変更する例を説明する。図5は無応答車両に関する情報が表示装置13に表示されている例である。図5で下線部分は、運転支援が調整される前の通常状態では表示されない。図5(a)は、信号機Sが赤信号であることを表示装置13に表示し、制御車両V0の運転者に報知している様子を示している。ここで、後方車両V2が、運転支援実施通知に対して無応答の場合には、従来の表示に加えて下線で示したように「後方車両にも注意してください」という表示が追加する。この表示を追加することにより、運転者に注意喚起をする。
【0044】
図5(b)は、燃費を向上させる運転支援であるエコ制御が行われていることを表示装置13に表示し、運転者に報知している様子を示している。ここで、周辺車両が運転支援実施通知に対して無応答の場合には、従来の表示に加えて下線で示すように「周囲の車間距離を確認してください」という注意を表示を追加することにより、運転者に注意喚起する。このように、応答をしない車両の存在を運転者に報知し、運転者に注意を促すことで車車間通信に対応していない車両との衝突を防止することができる。運転支援の内容の変更は、表示内容を変更する態様に限られず、ハザードランプを点滅させる制御を行うことにより後続車両に、減速制御が行われることを知らせてもよい。
【0045】
本実施形態における運転支援装置では、加減速制御を含む運転支援を実施する前に、予め前後車両に対して実施される運転支援の内容を車車間通信で通知する。そして、その通知に対して無応答の車両が存在する場合には、その車両は車車間通信に対応していないと判断する。周辺に無応答車両存在する場合には、予め運転支援の内容を通知されていない他車両が対応できるように、運転支援の内容を適切に調整する。このような態様にすることで、自車両の運転支援制御の内容を知らない車両が急激な運転操作により衝突を回避しなければならないような運転支援を防止することができる。
【0046】
(第2の実施の形態)
次に、本発明の第2の実施形態について説明する。図6は、本発明の第2の実施形態の運転支援装置が適用される状況を示す平面図である。以下の説明では、図6に示すように、運転支援装置1を搭載している制御車両V0が、片側2車線道路において、前方の右折車両V3を避けるために右車線L1から左車線L2へ車線変更しようとしている状況を想定する。また、制御車両V0の後方には、車線L1を走行する後方車両V4と車線L2を走行する後方車両V5が存在しているものとする。また、路側には、走行する車両の走行状態等の各種情報を検出して送信する路側装置2が設けられている。
【0047】
制御車両V0に搭載されている運転支援装置1は、第1の実施の形態で説明したものと同様の構成となっているため、再度の説明は省略する。
【0048】
次に、本実施形態に係る駐車支援装置の動作について説明する。図7は、運転支援装置1による運転支援の動作を示すフローチャートである。ここで本実施形態では、図6に示すような道路状況において、右左折の制御を含む運転支援が行われた場合における、運転支援を調整する手順について説明する。
【0049】
制御車両V0に搭載されている運転支援装置1は、路車間通信や車車間通信によりインフラ情報が送信されていないか定期的に監視をしている。運転支援装置1はインフラ情報を受信すると、図7に示す一連の処理が開始される。
【0050】
制御車両V0がインフラ情報を受信すると、運転支援決定部31は、制御車両V0において、インフラ協調システムによる運転支援を実施するか否かを決定する(S21)。運転支援を実施しないと判断した場合には、運転支援の一連の処理を終了する。
【0051】
運転支援を実施すると判断した場合には、運転支援の内容を決定する。続いて、決定された運転支援に右左折制御が含まれるか否かを判断する(S22)。運転支援に右左折制御が含まれない場合は、運転者に対して右左折を誘導する制御が含まれるか否かを判断する(S23)。運転支援に右左折誘導が含まれないと判断した場合には、運転支援決定部31が決定した運転支援を実行しても周辺車両V3,V4,V5に対して影響を与えないと考え、ステップS28に処理を移行する。
【0052】
運転支援に右左折誘導が含まれると判断した場合、もしくはステップS22で右左折制御が含まれると判断した場合には運転支援実施通知部32が、車車間通信装置12により周辺車両V3,V4,V5に対して実行しようとする運転支援の内容を通知する(S24)。続いて、一定時間内に周辺車両V3,V4,V5から運転支援実施通知に対する応答があるか否かを判断する(S25)。一定時間内に周辺車両V3,V4,V5から応答がなかった場合にはステップS29の処理に移行する。
【0053】
その結果、周辺車両V3,V4,V5から運転支援実施通知に対する応答があった場合には、車間距離の算出が行われる(S26)。車間距離は、車車間通信で得られる送信時刻と受信時刻の時間差から求められる。すなわち、送信時刻と受信時刻の時間差が大きいときは車間距離が大きく、送信時刻と受信時刻の時間差が小さいと車間距離が小さく算出される。さらに、制御車両V0と周辺車両V3,V4,V5との進行方位角、位置情報から周辺車両V3,V4,V5の存在する方位を算出する。
【0054】
続いて、車車間通信の電波強度が所定値I以上であるか否かの判断を行う(S27)。電波強度が所定値I以上である場合には、算出された車間距離が正確であると考えられることから、通常通りインフラ協調システムによる運転支援が実施される(S28)。一方、ここでは、路車間通信により取得したインフラ情報に加えて、制御車両V0と周辺車両V3,V4,V5との車間距離に基づいて運転支援が行われる。車車間通信の電波強度が所定値Iよりも小さい場合には、車車間通信の電波状態が悪く、算出された車間距離は信頼性が低いと考え、ステップS30の処理に移行する。
【0055】
路車間通信により制御車両V0の周辺に周辺車両V3,V4,V5の存在を認識しているにもかかわらず、一定時間以内に周辺車両V3,V4,V5から応答がない場合には、無応答車両は車車間通信不能状態であると考えられる。その場合には、自車の走行状態およびインフラ情報から運転支援の実施タイミングの見直しが可能か否かを判断する(S29)。
【0056】
運転支援の実施タイミングを変更することが可能であると判断した場合には、再度運転支援実施通知を行う(S24)。運転支援の実施タイミングを見直すことができない場合もしくは電波強度が所定値Iより小さい場合は、インフラ協調システムによる運転支援の制御量の調整を行うか、制御内容を変更して実施する(S30)。
【0057】
例えば、図6において、制御車両V0が前方の右折車両V3を回避するために車線L1から車線L2へ車線変更するための運転支援が行われる場合、制御車両V0から周辺車両V3,V4,V5に対して車線変更を行う旨の運転支援実施通知が行われる。これに対して、車両V3からは一定時間内に応答がなく、後方車両V4とV5は、運転支援の実行を許可する旨の応答を行った場合を想定する。また、後方車両V4からは所定値I以上の電波強度で応答があったものの、後方車両V5からの応答の電波強度は所定値Iよりも小さかったもとする。この場合、制御車両V0は、後方車両V5との車間距離が不明であるため、運転支援の実施タイミングを変更し、後方車両V5が通過した後に車線変更を実施する。さらに、制御車両V0は、前方車両V3が車車間通信に対応していないため、前方車両V3に注意が必要であることを表示装置13に表示することで運転者に報知する。こうして一連の運転支援の処理を終了する。
【0058】
本実施形態における運転支援装置は、右左折制御を含む運転支援を実施する前に、あらかじめ周辺車両に対して実施される運転支援の内容を車車間通信で通知する。その通知に対して応答がない車両が存在する場合には、運転支援における制御量の調整や運転支援の内容を変更することにより、周辺車両が急激な運転操作により衝突を回避しなければいけないような運転支援を防止することができる。さらに、応答があった場合でも、制御車両と周辺車両の車間距離の計測精度が悪い場合には運転支援における制御量の調整や運転支援の内容を変更する。このような態様にすることで、計測した距離の誤りが原因で発生する制御車両と周辺車両の衝突を防止でき、より安全性の高い運転支援を行うことができる。
【0059】
なお、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。例えば、本実施形態では、車車間通信の送信、受信時刻により車間距離を測定しているが、ミリ波レーザや車載カメラ、路側感知器等の、より計測精度の高い測定方法を用いてもよい。また、運転支援はインフラ情報に基づいて決定しているが、自車両に設置された各種センサから判断された情報に基づいて決定されてもよい。また本実施形態では車両間の通信手段として車車間通信装置を用いたが、その代わりに運転支援装置に接続された携帯電話や路車間通信装置等により、中継点を利用して車両間で通信を行ってもよい。
【0060】
第2の実施形態では、運転支援に右左折制御が含まれる場合に、計測された車間距離の精度に基づいて運転支援の内容を調整する運転支援装置について説明したが、このような運転支援は右左折制御が含まれる場合に限られない。例えば、第1の実施形態のように加減速制御を含む運転支援においても、車間距離の計測を行い、計測された車間距離の精度に基づいて運転支援の内容を調整してもよい。
【符号の説明】
【0061】
1…運転支援装置、2…路側装置、3…運転支援ECU、11…路車間通信装置、12…車車間通信装置、13…表示装置、14…スピーカ、15…ブレーキECU、16…エンジンECU、17…操舵ECU、31…運転支援決定部、32…運転支援実施通知部、33…運転支援制御部。
【特許請求の範囲】
【請求項1】
自車両と他車両との間で通信を行う通信手段と、
自車両の周辺情報に基づいて自車両の運転支援の内容を決定する運転支援決定手段と、
前記運転支援を実行する運転支援実行手段と、
前記通信手段により周辺車両に対して前記運転支援の実施を通知する運転支援実施通知手段と、
前記運転支援実施通知に対する応答の有無に基づいて前記運転支援の内容を調整する運転支援制御手段を備える運転支援装置。
【請求項2】
前記運転支援決定手段が決定する前記運転支援の内容には、少なくとも加減速の制御が含まれており、
前記運転支援制御手段は、前記運転支援実施通知に対して無応答である車両が存在する場合には、前記運転支援による加減速の制御量を小さくする請求項1に記載の運転支援装置。
【請求項3】
前記通信手段は車車間通信である請求項1又は2に記載の運転支援装置。
【請求項4】
前記運転支援制御手段は、前記運転支援実施通知に対して無応答である車両が存在する場合には、前記運転支援実施通知に対して無応答である車両に関する情報を自車両の運転者に報知する請求項1〜3のいずれか1項に記載の運転支援装置。
【請求項5】
前記運転支援制御手段は、前記運転支援実施通知に対する応答を受け取った際に、前記応答を行った他車両と自車両の計測距離の精度に基づいて前記運転支援の内容を調整する請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項1】
自車両と他車両との間で通信を行う通信手段と、
自車両の周辺情報に基づいて自車両の運転支援の内容を決定する運転支援決定手段と、
前記運転支援を実行する運転支援実行手段と、
前記通信手段により周辺車両に対して前記運転支援の実施を通知する運転支援実施通知手段と、
前記運転支援実施通知に対する応答の有無に基づいて前記運転支援の内容を調整する運転支援制御手段を備える運転支援装置。
【請求項2】
前記運転支援決定手段が決定する前記運転支援の内容には、少なくとも加減速の制御が含まれており、
前記運転支援制御手段は、前記運転支援実施通知に対して無応答である車両が存在する場合には、前記運転支援による加減速の制御量を小さくする請求項1に記載の運転支援装置。
【請求項3】
前記通信手段は車車間通信である請求項1又は2に記載の運転支援装置。
【請求項4】
前記運転支援制御手段は、前記運転支援実施通知に対して無応答である車両が存在する場合には、前記運転支援実施通知に対して無応答である車両に関する情報を自車両の運転者に報知する請求項1〜3のいずれか1項に記載の運転支援装置。
【請求項5】
前記運転支援制御手段は、前記運転支援実施通知に対する応答を受け取った際に、前記応答を行った他車両と自車両の計測距離の精度に基づいて前記運転支援の内容を調整する請求項1〜4のいずれか1項に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−48655(P2012−48655A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−192698(P2010−192698)
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]