
運転支援装置
【課題】リスク度合いの設定を容易に実行し、演算負荷を低減することが可能な運転支援装置を提供することにある。
【解決手段】地図データ中に含まれる道路のリスク度合いを設定する際に、任意の道路リンクを基準道路リンクとして設定し、この地点の道路形態、路面状態、交通状態、及び沿道環境等の判断要因に基づき、この地点近傍で判断要因が類似する道路リンクを同一の判定領域とする。そして、基準道路リンクについてのリスク度合いが求められた場合には、この基準道路リンクと同一の判定領域に含まれる道路リンク全体を同一のリスク度合いに設定する。このような手法で各道路のリスク度合いを設定することにより、極めて間便で且つ少ない演算負荷でリスク度マップを作成することでき、運転支援に役立てることができる。
【解決手段】地図データ中に含まれる道路のリスク度合いを設定する際に、任意の道路リンクを基準道路リンクとして設定し、この地点の道路形態、路面状態、交通状態、及び沿道環境等の判断要因に基づき、この地点近傍で判断要因が類似する道路リンクを同一の判定領域とする。そして、基準道路リンクについてのリスク度合いが求められた場合には、この基準道路リンクと同一の判定領域に含まれる道路リンク全体を同一のリスク度合いに設定する。このような手法で各道路のリスク度合いを設定することにより、極めて間便で且つ少ない演算負荷でリスク度マップを作成することでき、運転支援に役立てることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図データ中の道路に対してリスク度合いを設定し、リスク度合いの高い道路を移動体が走行する場合にこの移動体に注意喚起情報を送信して運転を支援する運転支援装置に関する。
【背景技術】
【0002】
道路交通に関するリスク度合いを自動収集し、その情報を用いて注意喚起が必要な地区を特定し、この注意喚起が必要な地区(以下、注意喚起対象領域という)を走行する移動体(例えば、車両)に対して警報を発したり、この注意喚起対象領域の走行を回避するように誘導するシステムが知られている(例えば、特許文献1参照)。このようなシステムによれば、例えば、ヒヤリハット情報が多く寄せられている地区の情報が車両の運転者に通知されるので、運転者に注意を喚起することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−123185号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1に記載されたシステムでは、ヒヤリハットの発生数を集計してリスク度合いの高い地区を特定する際に、その集計範囲を半径r[m]の円形領域、或いは、一辺がr[m]四方の矩形領域を一つの評価対象地区として設定する構成であるので、カーブ路や住宅地に面した道路のような道路形状が複雑である道路においては、本来は一つの評価対象地区とすべき範囲に複数の集計領域を設定する必要があり、注意喚起対象領域を特定する処理の演算負荷が大きくなるという問題がある。
【0005】
本発明は、このような従来の課題を解決するためになされたものであり、その目的とするところは、リスク度合いの高い領域の設定を容易に実行し、演算負荷を低減することが可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本願請求項1に記載の発明は、無線通信により移動体と通信可能な基地局に設けられ、蓄積した各種の情報を前記移動体に送信して、該移動体の運転を支援する運転支援装置において、道路に関する外部入力情報を取得する入力手段と、前記入力手段より入力される外部入力情報に基づいて、予め設定された地図データに含まれる道路のリスク度合いを判定し、該リスク度合いと道路とを対応させたリスク度マップを作成するリスク度マップ作成手段と、前記リスク度合いに対応した注意喚起情報を設定する注意喚起情報設定手段と、前記地図データ、前記リスク度マップ、及び前記注意喚起情報を記憶する記憶手段と、前記記憶手段に記憶された前記リスク度マップにて設定されるリスク度合いに応じた注意喚起情報を前記移動体に送信する送信手段と、を有し、前記リスク度マップ作成手段は、前記地図データに含まれる道路上の任意の地点についての外部入力情報を取得した場合には、この地点についてのリスク度合いを判定すると共に、この地点の道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因に基づき、この判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする。
【発明の効果】
【0007】
本発明に係る運転支援装置では、判断要因が類似する道路を同一の判定領域として設定し、この判定領域に対するリスク度合いを同一に設定するので、地図データ中に含まれる道路に対するリスク度合いの設定処理を間便化することができ、演算負荷を低減し、且つ演算に要する時間を短縮化することが可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係る運転支援装置が適用されるシステム構成を示すブロック図である。
【図2】本発明の一実施形態に係る運転支援装置の構成を示すブロック図である。
【図3】本発明の一実施形態に係る運転支援装置の支援対象とされる車両に搭載される車載装置の構成を示すブロック図である。
【図4】本発明の一実施形態に係る運転支援装置で用いられ、天候状態と危険回避行動或いは事故の発生頻度との関係を示すグラフである。
【図5】本発明の一実施形態に係る運転支援装置で実行されるリスク度合いの判定領域設定処理の手順を示すフローチャートである。
【図6】本発明の一実施形態に係る運転支援装置で実行されるリスク度合いの判定処理の手順を示すフローチャートである。
【図7】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図8】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図9】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図10】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図11】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図12】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図13】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【発明を実施するための形態】
【0009】
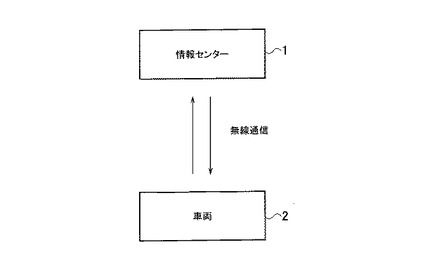
以下、本発明の実施の形態について図面を参照して説明する。図1は、本発明の一実施形態に係る運転支援装置が設けられる情報センター(基地局)1と車両(移動体)2を示すブロック図であり、情報センター1と車両2は、無線通信によりデータの送受信が可能とされている。
【0010】
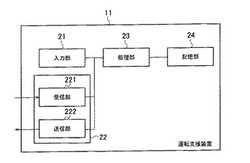
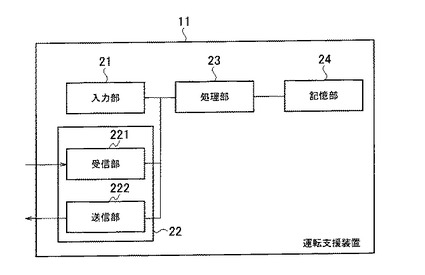
図2は、情報センター1に設けられる運転支援装置11の構成を示すブロック図である。図2に示すように、この運転支援装置11は、外部より各種の情報(外部入力情報)を入力する入力部21と、走行中の車両2との間でデータの送受信等を行う通信部22と、総括的な処理を行う処理部23を備えている。更に、地図データや、後述するリスク度マップ、注意喚起対象領域、リスク度合いに応じた注意喚起情報を記憶する記憶部24を備えている。ここで、記憶部24に記憶されている地図データには、道路の幅員、道路形状、歩道有無等の道路線形情報、及び道路沿道の建物、景観に関する道路沿道情報が、道路リンク単位で記憶されている。
【0011】
入力部21は、例えば、SD(Secure Digital)メディアカード、USB(Universal Serial Bus)メディア、CD(Compact Disk)、DVD(Digital Versatile Disc)等の各種の記録媒体を接続可能であり、これらの各種の記録媒体に記録されている情報を読み取る。
【0012】
入力部21より入力される情報としては、例えば、車両の運転者が急ブレーキをかけた地点、回数に関する情報や、過去において事故が発生した地点、発生時刻、損害の程度、事故累計、過失内容に関する情報が設定されている。ここで、車両の運転者が急ブレーキをかけた情報は、例えば車両に搭載されるドライブレコーダに記録されており、該ドライブレコーダの記録媒体を入力部21に接続して取得することができる。また、過去の事故に関する情報は、警察の事故情報データより取得が可能である。
【0013】
通信部22は、受信部221、及び送信部222を備えている。このうち、受信部221は、携帯電話網、インターネット網、電話回線網、或いは近距離通信手段等の無線通信方式、若しくは有線通信方式により、天候、時刻、道路の路面状態、及び道路上の交通量に関する情報、車両の移動状態に関する情報を取得する。例えば、天候情報は、気象庁より送信される情報に基づき、雨、曇り、晴れ、みぞれ、ひょう、あられ、霧、或いは雪等の情報を取得することができる。また、交通量に関する情報は、道路交通センターより定期的に配信される情報に基づいて取得することができる。路面状態に関する情報は、例えば警察が配信する道路工事の情報に基づいて取得することができる。具体的には、路面が舗装されているか砂利道であるか、或いは工事中により悪路となっているか否か、凍結が発生し易い道路であるか否か等の情報を取得することが可能である。
【0014】
更に、受信部221は、道路上を走行中の車両2との間での通信により、該車両2の位置データを取得する。即ち、車両2はGPS等の走行位置を特定する機能を備えており、この位置データは無線通信により送信され、運転支援装置11の受信部221にて受信される。従って、該運転支援装置11は、無線通信により接続された各車両の走行位置を認識することができる。
【0015】
また、送信部222は、道路上を走行中の車両2に対して各種の情報を送信する。例えば、後述するように、リスク度合いの高い道路に接近する車両2が存在する場合には、この車両2に対して注意喚起情報を送信し、この車両2の運転者に対して注意を促す。
【0016】
処理部23は、例えば、CPU、RAM、ROM(いずれも図示省略)等から構成され、運転支援装置11全体を総括的に制御する処理を実行する。特に、入力部21或いは受信部221より入力された各種の情報に基づいて、記憶部24に記憶されている地図データに含まれる各道路に対してリスク度合いを設定し、このリスク度合いを対応させたリスク度マップを作成して記憶部24に記憶する。更に、リスク度合いの大きさに基づき、注意喚起が必要であると判断される地区を注意喚起対象領域として設定し、且つ、この注意喚起対象領域に対して、リスクの種類に応じた注意喚起情報を設定する。
【0017】
例えば、入力部21或いは受信部221より取得される各種のデータに基づき、過去に急ブレーキをかけた回数の多い地点や、過去に事故が発生した回数の多い地点が存在する場合には、この地点はリスク度合いが高いと判断し、この地点を注意喚起が必要な注意喚起対象領域として設定する。更に、この注意喚起対象領域について、事故多発地区であることを示す注意喚起情報を対応して記憶する。
【0018】
更に、処理部23は、地図データに含まれる道路上のある地点についての外部入力情報を取得した場合には、この地点についてのリスク度合いを判定すると共に、この地点の道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因に基づき、この判断要因が類似する道路に対し、この地点について判定されたリスク度合いと同一のリスク度合いに設定して、リスク度マップを作成、或いは変更する処理を行う。即ち、処理部23は、入力部21(入力手段)より入力される外部入力情報に基づいて、予め設定された地図データに含まれる道路のリスク度合いを判定し、該リスク度合いを道路に対応させたリスク度マップを作成するリスク度マップ作成手段としての機能を備える。
【0019】
また、処理部23は、受信部221を介して各車両2の位置情報を取得し、注意喚起対象領域として設定された道路に車両2が接近していることが認識された場合には、この車両2に対して、この注意喚起対象領域に対して設定された注意喚起情報を送信する処理を実行する。即ち、処理部23は、車両(移動体)の位置を認識可能な移動体位置認識手段としての機能を備える。
【0020】
記憶部24は、上述したように地図データが記憶されており、更に、処理部23により作成されるリスク度マップを記憶し、且つ、リスク度合いに応じた注意喚起情報、及びリスク度合いが高いと判定された注意喚起対象領域のデータを記憶する。
【0021】
そして、本実施形態に係る運転支援装置11は、車両2との間で通信を行い、車両2が注意喚起対象領域に接近した場合には、この走行路のリスク度合いが高いことを示す情報、及びこの領域に対応する注意喚起情報を該当する車両2に送信する。これにより、車両2の運転者に対して、例えば、過去に多くの急ブレーキがかけられたことや、多くの事故が発生した道路に侵入しつつあることを認識させることができ、運転者に対してより注意深い運転が必要であることを意識させることができる。
【0022】
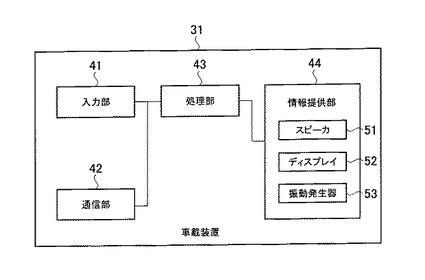
次に、車両に搭載される車載装置について説明する。図3は、車載装置31の構成を示すブロック図である。
【0023】
図3に示すように、この車載装置31は、情報センター1の運転支援装置11が生成する情報を移動体通信方式により取得するとともに、車両2の状態に関する情報を運転支援装置11に送信する通信部42と、運転支援装置11により生成される情報を記録メディアを介して取得する入力部41と、運転支援装置11により生成される情報に基づいて、情報提供の実施判断を行う処理部43と、車両2の運転者に対して注意喚起情報を報知する情報提供部44を備えている。
【0024】
入力部41は、例えば、SDメディアカード、USBメディア、CD、DVD等の記録媒体を介して情報を入力する機能を備える。
【0025】
通信部42は、例えば、携帯電話網、インターネット網、電話回線網、または近距離通信方式等の無線、若しくは有線通信方式を介して情報を送受信するものである。また、この通信部42は、例えば、移動体の位置、時刻、移動速度、ブレーキ操作、アクセル操作、ステアリング操作、減速度、減速度の微分値(ジャーク)、エアバッグ作動、ABS作動、ブレーキアシスト作動に関する移動体の状態に関する情報を情報センター1に送信するものである。
【0026】
処理部43は、車両2の周囲の道路に関する危険度合いに関する情報を運転者に報知する処理を実行する。例えば、通信部42を介して、運転支援装置11より送信された注意喚起情報が取得された場合には、この注意喚起情報を情報提供部44に転送して、運転者に対して注意を促す。また、GPS機能等の車両2の位置を特定する機能を備えており、車両2の位置データを通信部42を介して情報センター1の運転支援装置11に送信する。
【0027】
情報提供部44は、音声やブザー音等により注意喚起情報を報知するスピーカ51と、画像を表示して注意喚起情報を報知するディスプレイ52、及び振動を発生させて注意喚起情報を報知する振動発生器53を備えている。
【0028】
スピーカ51は、音声や報知音のような聴覚刺激によって車両2の運転手に情報提供するものであり、電気エネルギーを音エネルギーに変換する変換部と、例えば、アンプのような音声や報知音の電気信号を増幅したり、加工したりする増幅部と、前記車載装置の処理部からの信号に基づいて増幅部の動作を制御する制御部とから構成される。なお、スピーカ51に替えて、ヘッドホン、イヤホン等としても良い。
【0029】
ディスプレイ52は、画像や映像のような視覚刺激によって車両2の運転手に情報を提供する。例えば、カーナビゲーションのモニタ、携帯電話のモニタ、TVモニタ、PCモニタ等の情報を表示する表示部と、処理部43からの信号に基づいて表示部の動作を制御する制御部から構成される。
【0030】
振動発生器53は、シートベルトの引き上げのような触覚刺激によって車両2の運転手に情報提供する。例えば、シートベルトを引き上げたり、シートの一部を押し上げたり、またはステアリングに反力を与えたりすることによって車両2の運転手に情報を提供するものであり、車両2の運転手に対する触覚刺激を発生させるアクチュエーター部と、アクチュエーター部を制御する制御部とから構成される。
【0031】
次に、上述のように構成された本実施形態に係る運転支援装置11の動作について説明する。図4は、処理部23において実行される注意喚起対象領域の設定処理の手順を示すフローチャートである。
【0032】
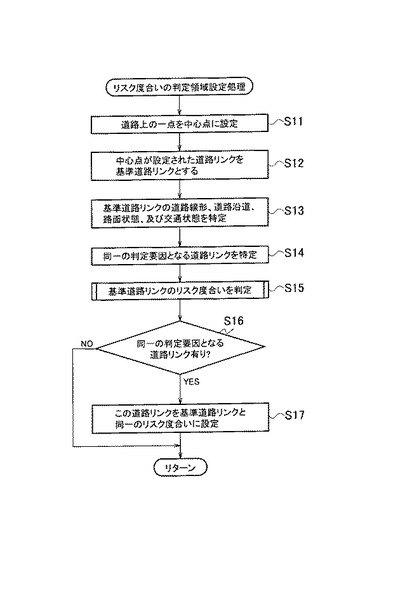
初めに、ステップS11において、処理部23は、運転支援装置11の記憶部24に記憶されている地図データに基づき、該地図データに含まれる道路上の任意の一点を、リスク度合いの評価を実施する中心点として設定する。
【0033】
次に、ステップS12において、処理部23は、記憶部24記憶されている地図データから、ステップS11の処理で設定された中心点を含む道路リンク(例えば、交差点間で区切った道路)をリスク度合いの評価領域として設定する。そして、この道路リンクを基準道路リンクとする
ステップS13において、処理部23は、記憶部24に記憶されている地図データから、ステップS12の処理で評価領域に設定した基準道路リンクの道路形態、路面状態、交通状態、及び沿道環境(以下、これらを総称して「判断要因」という)を特定する。ここで、道路形態とは、この道路リンクが直線路であるか、或いはカーブ路であるか、また、カーブ路である場合には、その曲率がどの程度かを示すデータである。沿道環境とは、道路の沿道が市街地、農道、住宅地、或いは観光地であるか等のデータである。路面状態とは、その道路の路面が舗装されているか、砂利道であるか、或いは工事中で悪路とされているか等のデータである。交通状態とは、その道路が渋滞中であるか否かのデータである。
【0034】
ステップS14において、処理部23は、ステップS12の処理で評価領域に設定した道路リンクに接している道路リンクのうち、上記の判断要因(道路形態、路面状態、交通状態、沿道環境)のうちの少なくとも一つが、ステップS13の処理で特定した判断要因と類似する道路リンクが存在するか否かを判断し、類似すると判断された道路リンクが存在する場合には、この道路リンクを評価領域に加える。
【0035】
ステップS15において、処理部23は、基準道路リンクのリスク度合いを判定する。この判定処理については、後述する。
【0036】
ステップS16において、処理部23は、ステップS14の処理で、基準道路リンクと判断要因が類似する道路リンクが存在するか否かを判定する。そして、存在しない場合には(ステップS16でNO)、本処理を終了する。存在する場合には(ステップS16でYES)、ステップS17の処理において、処理部23は、この道路リンクを基準道路リンクと同一の危険度合いに設定する。その後、本処理を終了する。
【0037】
そして、上述したステップS11〜S17の処理を繰り返すことにより、地図データに含まれる各道路に対してのリスク度合いを設定し、リスク度マップを作成することができる。
【0038】
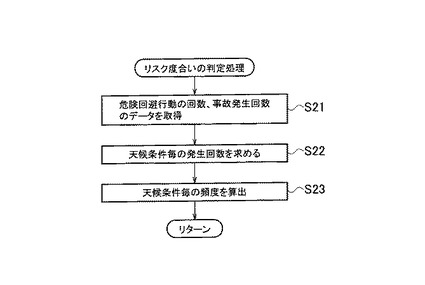
次に、図5のステップS15に示したリスク度合いの判定処理を、図6に示すフローチャートを参照して説明する。この処理では、一例として急ブレーキをかける等の危険回避行動が発生した回数及び事故発生回数と、危険回避行動が発生したときの天候に基づいて、リスク度合いを判定する場合について説明する。
【0039】
ステップS21の処理において、処理部23は、記憶部24に記憶されている車両の危険回避行動発生情報と過去に発生した事故情報とから、リスク度合いの評価領域として設定された道路リンク上における危険回避行動発生情報と事故情報とを特定する。
【0040】
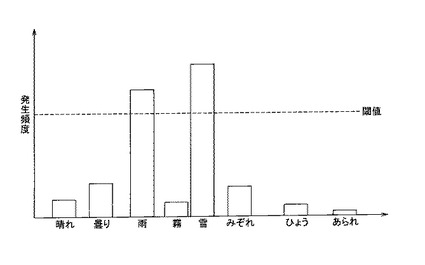
ステップS22において、処理部23は、ステップS21の処理で特定した危険回避行動発生情報と事故情報とから、天候、曜日、時間帯、路面状態、交通量毎の発生分布を演算する。例えば、天候であれば、晴れ、曇り、雨、霧、雪、みぞれ、ひょう、あられといった天候条件毎に、評価領域内における危険回避行動の発生回数と事故の発生回数とをカウントし、天候条件毎の発生回数を認識する。
【0041】
ステップS23において、処理部23は、ステップS22において演算した、天候、曜日、時間帯、路面状態、交通量毎の発生分布を、ステップS22における評価領域内で発生した危険回避行動の発生回数と事故の発生回数の総和に基づいて、天候、曜日、時間帯、路面状態、交通量毎の発生頻度割合を演算する。
【0042】
その結果、例えば、図4に示すように、天候に応じた危険回避行動の発生回数、及び事故発生回数のデータを取得することができる。これにより、各判定領域(基準道路リンク及びこの道路リンクと判断要件が類似する道路リンク)において、リスク度合いを設定することができる。従って、全ての道路リンクに対して個別にリスク度合いの設定処理を行う必要が無く、リスク度合いの判定処理、即ちリスク度マップの作成処理を間便に行うことができる。
【0043】
更に、複数の判断要因の組み合せにより、リスク度合いが高くなる条件を決定する。リスク度合いの評価において演算した、天候、曜日、時間帯、路面状態、交通量毎の発生頻度割合において、発生頻度が所定の閾値より高くなる条件の組み合せを決定する。例えば、図4に示した発生頻度分布の場合では、天候=[雨または 雪]を条件として決定する。また、同様に、曜日、時間帯、路面状態、交通量についても条件を決定し、その組み合せ条件を決定する。このような処理により、リスク度合いが高くなる条件を設定することが可能となる。
【0044】
そして、リスク度合いが一定の値を超える判定領域を注意喚起対象領域に設定し、車両2がこの注意喚起対象領域に侵入或いは接近する場合には、この車両2に対して注意喚起情報を送信する。従って、対象となる車両2の車載装置31では、スピーカ51やディスプレイ52、或いは振動発生器53により、運転者に対して車両2がリスク度合いの高い道路に侵入、或いは接近していることを報知する。
【0045】
次に、判断要因が同一と見なす場合と、同一と見なさない場合の具体例を、図7〜図13を参照して説明する。
【0046】
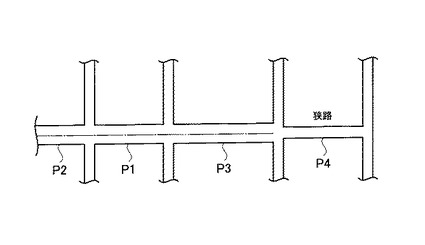
図7は、判断要因として道路形態を設定してリスク度合いを判定する場合の第1の例を示している。図7において、道路リンクP1が基準道路リンクとして設定された場合には、この基準道路リンクP1に隣接する道路リンクP2,P3は基準道路リンクP1と道路幅がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP4は、基準道路リンクP1とは道路幅が異なるので、同一の判定領域として認識されない。従って、このような道路形態では、道路リンクP1,P2,P3が同一の判定領域に設定されるので、基準道路リンクP1に対してリスク度合いが設定されると、道路リンクP2,P3も同様のリスク度合いに設定される。つまり、道路リンクP2,P3のリスク度合いを再度設定する必要がないので、演算負荷を軽減できる。
【0047】
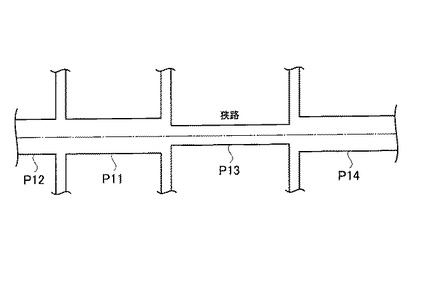
図8は、判断要因として道路形態を設定してリスク度合いを判定する場合の第2の例を示している。図8において、道路リンクP11が基準道路リンクとして設定された場合には、この基準道路リンクP11に隣接する道路リンクP12は道路リンクP11と道路幅がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP13は、基準道路リンクP11とは道路幅が異なるので、同一の判定領域として認識されない。更に、道路リンクP13を挟んだ道路リンクP14は、基準道路リンクP11とほぼ同一である。従って、このような道路形態では、道路リンクP11,P12,P14が同一の判定領域に設定されることになる。そして、基準道路リンクP11に対してリスク度合いが設定されると、道路リンクP12,P14も同様のリスク度合いに設定される。このように、本実施形態では、基準道路リンクP11に対して連続していない道路リンクP14についても、道路形態が類似していると認識される道路リンクは同一の判定領域として設定され、リスク度合いが設定されることになる。
【0048】
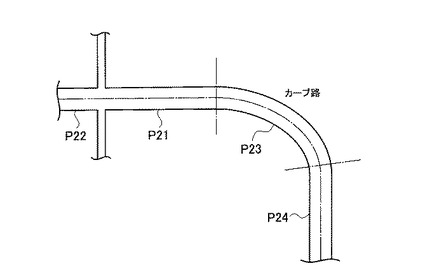
図9は、判断要因として道路形態を設定してリスク度合いを判定する場合の第3の例を示している。図9において、道路リンクP21が基準道路リンクとして設定された場合には、この基準道路リンクP21に隣接する道路リンクP22は基準道路リンクP21と同様に直線路であるので、同一の判定領域に設定される。しかし、道路リンクP23は、カーブ路であるので、同一の判定領域として認識されない。更に、道路リンクP24は、基準道路リンクP21と同様な直線路となっているので、同一の判定領域に設定される。従って、このような道路形態では、道路リンクP21,P22,P24が同一の判定領域に設定されることになる。そして、基準道路リンクP21に対してリスク度合いが設定されると、道路リンクP22,P24も同様のリスク度合いに設定される。
【0049】
なお、図7〜9では、道路形態として、道路幅、道路の曲率を例に挙げて説明したが、その他の道路形態として、道路リンクに接続される道路数、道路リンクの車線数、道路リンクに存在する信号の個数、道路リンクの制限速度、道路リンクの歩道の有無、等を設定することも可能である。
【0050】
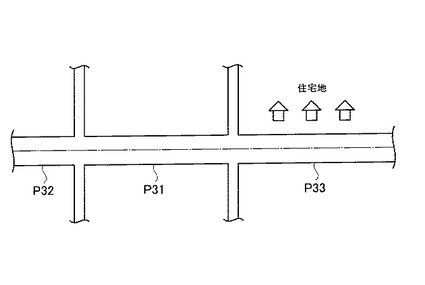
図10は、判断要因として沿道環境を設定してリスク度合いを判定する場合の例を示している。図10において、道路リンクP31が基準道路リンクとして設定された場合には、この基準道路リンクP31に隣接する道路リンクP32は基準道路リンクP31と沿道環境が同一であるので、同一の判定領域に設定される。しかし、道路リンクP33は、沿道に住宅地が存在し、基準道路リンクP31とは沿道環境が異なるので、同一の判定領域として認識されない。従って、このような沿道環境では、道路リンクP31,P32が同一の判定領域に設定されるので、基準道路リンクP31に対してリスク度合いが設定されると、道路リンクP32も同様のリスク度合いに設定される。
【0051】
なお、沿道環境の他の例として、道路上から視認可能な物体の有無、沿道に存在する建物の種類、沿道に設置された街灯の有無、観光地の有無、等を設定することも可能である。
【0052】
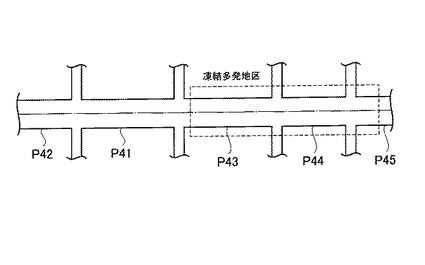
図11は、判断要因として路面状態を設定してリスク度合いを判定する場合の第1の例を示している。図11において、道路リンクP41が基準道路リンクとして設定された場合には、この基準道路リンクP41に隣接する道路リンクP42は基準道路リンクP41と路面状態がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP43,P44,P45は、凍結多発地区であり、基準道路リンクP41とは路面状態が異なるので、同一の判定領域として認識されない。従って、このような道路形態では、道路リンクP41,P42が同一の判定領域に設定されることになり、基準道路リンクP41に対してリスク度合いが設定されると、道路リンクP42も同様のリスク度合いに設定される。
【0053】
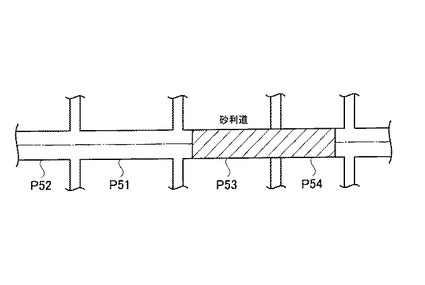
図12は、判断要因として路面状態を設定してリスク度合いを判定する場合の第2の例を示している。図12において、道路リンクP51が基準道路リンクとして設定された場合には、この基準道路リンクP51に隣接する道路リンクP52は基準道路リンクP51と同様の舗装道路であり路面状態が同一であるので、同一の判定領域に設定される。しかし、道路リンクP53,P54は、砂利道であり、基準道路リンクP51とは路面状態が異なるので、同一の判定領域として認識されない。従って、このような道路形態では、道路リンクP51,P52が同一の判定領域に設定されることになり、基準道路リンクP51に対してリスク度合いが設定されると、道路リンクP52も同様のリスク度合いに設定される。
【0054】
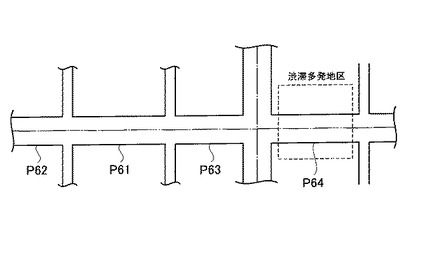
図13は、判断要因として交通状態を設定してリスク度合いを判定する場合の例を示している。図13において、道路リンクP61が基準道路リンクとして設定された場合には、この基準道路リンクP61に隣接する道路リンクP62,P63は、基準道路リンクP61と交通状態がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP64は、渋滞多発地区として設定されており、基準道路リンクP61とは交通状態が異なるので、同一の判定領域として認識されない。従って、このような交通状態では、道路リンクP61〜P63が同一の判定領域に設定されることになり、基準道路リンクP61に対してリスク度合いが設定されると、道路リンクP62,P63も同様のリスク度合いに設定される。
【0055】
このようにして、本実施形態に係る運転支援装置11では、地図データに含まれる道路にリスク度合いを設定する際に、基準として設定した基準道路リンクに対して、道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも一つの判断要因が類似する道路リンクを同一の判定領域とし、同一のリスク度合いとして判断するので、リスク度合いを示すリスク度マップの作成を間便に行うことができる。従って、従来と比較して演算負荷を軽減し、且つ短時間で、各道路についてのリスク度合いを設定することができる。
【0056】
また、基準道路リンクに対して連続する道路、及び不連続とされた道路の双方について、同一の判定領域が設定されるので、より広い範囲で同一の判定領域を設定することができ、より一層演算負荷を軽減することができる。
【0057】
更に、リスク度合いが高いと判定された道路を注意喚起対象領域として設定し、車両2がこの注意喚起対象領域に侵入或いは接近した場合には、この車両2に対して注意喚起情報を送信するので、車両2の運転者に対してリスク度合いに応じた適切な注意喚起を行うことができ、運転者の注意力を高めることができる。
【0058】
また、外部入力情報として、天候情報を取得する場合には、天候情報に応じた適切な注意喚起が可能となり、より一層安全性を高めることができる。
【0059】
以上、本発明の運転支援装置を図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。
【産業上の利用可能性】
【0060】
本発明は、リスク度合いを設定するリスク度マップを間便に作成する上で有用である。
【符号の説明】
【0061】
1 情報センター
2 車両(移動体)
11 運転支援装置
21 入力部
22 通信部
23 処理部
24 記憶部
31 車載装置
41 入力部
42 通信部
43 処理部
44 情報提供部
51 スピーカ
52 ディスプレイ
53 振動発生器
221 受信部
222 送信部
【技術分野】
【0001】
本発明は、地図データ中の道路に対してリスク度合いを設定し、リスク度合いの高い道路を移動体が走行する場合にこの移動体に注意喚起情報を送信して運転を支援する運転支援装置に関する。
【背景技術】
【0002】
道路交通に関するリスク度合いを自動収集し、その情報を用いて注意喚起が必要な地区を特定し、この注意喚起が必要な地区(以下、注意喚起対象領域という)を走行する移動体(例えば、車両)に対して警報を発したり、この注意喚起対象領域の走行を回避するように誘導するシステムが知られている(例えば、特許文献1参照)。このようなシステムによれば、例えば、ヒヤリハット情報が多く寄せられている地区の情報が車両の運転者に通知されるので、運転者に注意を喚起することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−123185号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1に記載されたシステムでは、ヒヤリハットの発生数を集計してリスク度合いの高い地区を特定する際に、その集計範囲を半径r[m]の円形領域、或いは、一辺がr[m]四方の矩形領域を一つの評価対象地区として設定する構成であるので、カーブ路や住宅地に面した道路のような道路形状が複雑である道路においては、本来は一つの評価対象地区とすべき範囲に複数の集計領域を設定する必要があり、注意喚起対象領域を特定する処理の演算負荷が大きくなるという問題がある。
【0005】
本発明は、このような従来の課題を解決するためになされたものであり、その目的とするところは、リスク度合いの高い領域の設定を容易に実行し、演算負荷を低減することが可能な運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本願請求項1に記載の発明は、無線通信により移動体と通信可能な基地局に設けられ、蓄積した各種の情報を前記移動体に送信して、該移動体の運転を支援する運転支援装置において、道路に関する外部入力情報を取得する入力手段と、前記入力手段より入力される外部入力情報に基づいて、予め設定された地図データに含まれる道路のリスク度合いを判定し、該リスク度合いと道路とを対応させたリスク度マップを作成するリスク度マップ作成手段と、前記リスク度合いに対応した注意喚起情報を設定する注意喚起情報設定手段と、前記地図データ、前記リスク度マップ、及び前記注意喚起情報を記憶する記憶手段と、前記記憶手段に記憶された前記リスク度マップにて設定されるリスク度合いに応じた注意喚起情報を前記移動体に送信する送信手段と、を有し、前記リスク度マップ作成手段は、前記地図データに含まれる道路上の任意の地点についての外部入力情報を取得した場合には、この地点についてのリスク度合いを判定すると共に、この地点の道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因に基づき、この判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする。
【発明の効果】
【0007】
本発明に係る運転支援装置では、判断要因が類似する道路を同一の判定領域として設定し、この判定領域に対するリスク度合いを同一に設定するので、地図データ中に含まれる道路に対するリスク度合いの設定処理を間便化することができ、演算負荷を低減し、且つ演算に要する時間を短縮化することが可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係る運転支援装置が適用されるシステム構成を示すブロック図である。
【図2】本発明の一実施形態に係る運転支援装置の構成を示すブロック図である。
【図3】本発明の一実施形態に係る運転支援装置の支援対象とされる車両に搭載される車載装置の構成を示すブロック図である。
【図4】本発明の一実施形態に係る運転支援装置で用いられ、天候状態と危険回避行動或いは事故の発生頻度との関係を示すグラフである。
【図5】本発明の一実施形態に係る運転支援装置で実行されるリスク度合いの判定領域設定処理の手順を示すフローチャートである。
【図6】本発明の一実施形態に係る運転支援装置で実行されるリスク度合いの判定処理の手順を示すフローチャートである。
【図7】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図8】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図9】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図10】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図11】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図12】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【図13】本発明の一実施形態に係る運転支援装置で、同一の判定領域と見なす例を示す説明図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について図面を参照して説明する。図1は、本発明の一実施形態に係る運転支援装置が設けられる情報センター(基地局)1と車両(移動体)2を示すブロック図であり、情報センター1と車両2は、無線通信によりデータの送受信が可能とされている。
【0010】
図2は、情報センター1に設けられる運転支援装置11の構成を示すブロック図である。図2に示すように、この運転支援装置11は、外部より各種の情報(外部入力情報)を入力する入力部21と、走行中の車両2との間でデータの送受信等を行う通信部22と、総括的な処理を行う処理部23を備えている。更に、地図データや、後述するリスク度マップ、注意喚起対象領域、リスク度合いに応じた注意喚起情報を記憶する記憶部24を備えている。ここで、記憶部24に記憶されている地図データには、道路の幅員、道路形状、歩道有無等の道路線形情報、及び道路沿道の建物、景観に関する道路沿道情報が、道路リンク単位で記憶されている。
【0011】
入力部21は、例えば、SD(Secure Digital)メディアカード、USB(Universal Serial Bus)メディア、CD(Compact Disk)、DVD(Digital Versatile Disc)等の各種の記録媒体を接続可能であり、これらの各種の記録媒体に記録されている情報を読み取る。
【0012】
入力部21より入力される情報としては、例えば、車両の運転者が急ブレーキをかけた地点、回数に関する情報や、過去において事故が発生した地点、発生時刻、損害の程度、事故累計、過失内容に関する情報が設定されている。ここで、車両の運転者が急ブレーキをかけた情報は、例えば車両に搭載されるドライブレコーダに記録されており、該ドライブレコーダの記録媒体を入力部21に接続して取得することができる。また、過去の事故に関する情報は、警察の事故情報データより取得が可能である。
【0013】
通信部22は、受信部221、及び送信部222を備えている。このうち、受信部221は、携帯電話網、インターネット網、電話回線網、或いは近距離通信手段等の無線通信方式、若しくは有線通信方式により、天候、時刻、道路の路面状態、及び道路上の交通量に関する情報、車両の移動状態に関する情報を取得する。例えば、天候情報は、気象庁より送信される情報に基づき、雨、曇り、晴れ、みぞれ、ひょう、あられ、霧、或いは雪等の情報を取得することができる。また、交通量に関する情報は、道路交通センターより定期的に配信される情報に基づいて取得することができる。路面状態に関する情報は、例えば警察が配信する道路工事の情報に基づいて取得することができる。具体的には、路面が舗装されているか砂利道であるか、或いは工事中により悪路となっているか否か、凍結が発生し易い道路であるか否か等の情報を取得することが可能である。
【0014】
更に、受信部221は、道路上を走行中の車両2との間での通信により、該車両2の位置データを取得する。即ち、車両2はGPS等の走行位置を特定する機能を備えており、この位置データは無線通信により送信され、運転支援装置11の受信部221にて受信される。従って、該運転支援装置11は、無線通信により接続された各車両の走行位置を認識することができる。
【0015】
また、送信部222は、道路上を走行中の車両2に対して各種の情報を送信する。例えば、後述するように、リスク度合いの高い道路に接近する車両2が存在する場合には、この車両2に対して注意喚起情報を送信し、この車両2の運転者に対して注意を促す。
【0016】
処理部23は、例えば、CPU、RAM、ROM(いずれも図示省略)等から構成され、運転支援装置11全体を総括的に制御する処理を実行する。特に、入力部21或いは受信部221より入力された各種の情報に基づいて、記憶部24に記憶されている地図データに含まれる各道路に対してリスク度合いを設定し、このリスク度合いを対応させたリスク度マップを作成して記憶部24に記憶する。更に、リスク度合いの大きさに基づき、注意喚起が必要であると判断される地区を注意喚起対象領域として設定し、且つ、この注意喚起対象領域に対して、リスクの種類に応じた注意喚起情報を設定する。
【0017】
例えば、入力部21或いは受信部221より取得される各種のデータに基づき、過去に急ブレーキをかけた回数の多い地点や、過去に事故が発生した回数の多い地点が存在する場合には、この地点はリスク度合いが高いと判断し、この地点を注意喚起が必要な注意喚起対象領域として設定する。更に、この注意喚起対象領域について、事故多発地区であることを示す注意喚起情報を対応して記憶する。
【0018】
更に、処理部23は、地図データに含まれる道路上のある地点についての外部入力情報を取得した場合には、この地点についてのリスク度合いを判定すると共に、この地点の道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因に基づき、この判断要因が類似する道路に対し、この地点について判定されたリスク度合いと同一のリスク度合いに設定して、リスク度マップを作成、或いは変更する処理を行う。即ち、処理部23は、入力部21(入力手段)より入力される外部入力情報に基づいて、予め設定された地図データに含まれる道路のリスク度合いを判定し、該リスク度合いを道路に対応させたリスク度マップを作成するリスク度マップ作成手段としての機能を備える。
【0019】
また、処理部23は、受信部221を介して各車両2の位置情報を取得し、注意喚起対象領域として設定された道路に車両2が接近していることが認識された場合には、この車両2に対して、この注意喚起対象領域に対して設定された注意喚起情報を送信する処理を実行する。即ち、処理部23は、車両(移動体)の位置を認識可能な移動体位置認識手段としての機能を備える。
【0020】
記憶部24は、上述したように地図データが記憶されており、更に、処理部23により作成されるリスク度マップを記憶し、且つ、リスク度合いに応じた注意喚起情報、及びリスク度合いが高いと判定された注意喚起対象領域のデータを記憶する。
【0021】
そして、本実施形態に係る運転支援装置11は、車両2との間で通信を行い、車両2が注意喚起対象領域に接近した場合には、この走行路のリスク度合いが高いことを示す情報、及びこの領域に対応する注意喚起情報を該当する車両2に送信する。これにより、車両2の運転者に対して、例えば、過去に多くの急ブレーキがかけられたことや、多くの事故が発生した道路に侵入しつつあることを認識させることができ、運転者に対してより注意深い運転が必要であることを意識させることができる。
【0022】
次に、車両に搭載される車載装置について説明する。図3は、車載装置31の構成を示すブロック図である。
【0023】
図3に示すように、この車載装置31は、情報センター1の運転支援装置11が生成する情報を移動体通信方式により取得するとともに、車両2の状態に関する情報を運転支援装置11に送信する通信部42と、運転支援装置11により生成される情報を記録メディアを介して取得する入力部41と、運転支援装置11により生成される情報に基づいて、情報提供の実施判断を行う処理部43と、車両2の運転者に対して注意喚起情報を報知する情報提供部44を備えている。
【0024】
入力部41は、例えば、SDメディアカード、USBメディア、CD、DVD等の記録媒体を介して情報を入力する機能を備える。
【0025】
通信部42は、例えば、携帯電話網、インターネット網、電話回線網、または近距離通信方式等の無線、若しくは有線通信方式を介して情報を送受信するものである。また、この通信部42は、例えば、移動体の位置、時刻、移動速度、ブレーキ操作、アクセル操作、ステアリング操作、減速度、減速度の微分値(ジャーク)、エアバッグ作動、ABS作動、ブレーキアシスト作動に関する移動体の状態に関する情報を情報センター1に送信するものである。
【0026】
処理部43は、車両2の周囲の道路に関する危険度合いに関する情報を運転者に報知する処理を実行する。例えば、通信部42を介して、運転支援装置11より送信された注意喚起情報が取得された場合には、この注意喚起情報を情報提供部44に転送して、運転者に対して注意を促す。また、GPS機能等の車両2の位置を特定する機能を備えており、車両2の位置データを通信部42を介して情報センター1の運転支援装置11に送信する。
【0027】
情報提供部44は、音声やブザー音等により注意喚起情報を報知するスピーカ51と、画像を表示して注意喚起情報を報知するディスプレイ52、及び振動を発生させて注意喚起情報を報知する振動発生器53を備えている。
【0028】
スピーカ51は、音声や報知音のような聴覚刺激によって車両2の運転手に情報提供するものであり、電気エネルギーを音エネルギーに変換する変換部と、例えば、アンプのような音声や報知音の電気信号を増幅したり、加工したりする増幅部と、前記車載装置の処理部からの信号に基づいて増幅部の動作を制御する制御部とから構成される。なお、スピーカ51に替えて、ヘッドホン、イヤホン等としても良い。
【0029】
ディスプレイ52は、画像や映像のような視覚刺激によって車両2の運転手に情報を提供する。例えば、カーナビゲーションのモニタ、携帯電話のモニタ、TVモニタ、PCモニタ等の情報を表示する表示部と、処理部43からの信号に基づいて表示部の動作を制御する制御部から構成される。
【0030】
振動発生器53は、シートベルトの引き上げのような触覚刺激によって車両2の運転手に情報提供する。例えば、シートベルトを引き上げたり、シートの一部を押し上げたり、またはステアリングに反力を与えたりすることによって車両2の運転手に情報を提供するものであり、車両2の運転手に対する触覚刺激を発生させるアクチュエーター部と、アクチュエーター部を制御する制御部とから構成される。
【0031】
次に、上述のように構成された本実施形態に係る運転支援装置11の動作について説明する。図4は、処理部23において実行される注意喚起対象領域の設定処理の手順を示すフローチャートである。
【0032】
初めに、ステップS11において、処理部23は、運転支援装置11の記憶部24に記憶されている地図データに基づき、該地図データに含まれる道路上の任意の一点を、リスク度合いの評価を実施する中心点として設定する。
【0033】
次に、ステップS12において、処理部23は、記憶部24記憶されている地図データから、ステップS11の処理で設定された中心点を含む道路リンク(例えば、交差点間で区切った道路)をリスク度合いの評価領域として設定する。そして、この道路リンクを基準道路リンクとする
ステップS13において、処理部23は、記憶部24に記憶されている地図データから、ステップS12の処理で評価領域に設定した基準道路リンクの道路形態、路面状態、交通状態、及び沿道環境(以下、これらを総称して「判断要因」という)を特定する。ここで、道路形態とは、この道路リンクが直線路であるか、或いはカーブ路であるか、また、カーブ路である場合には、その曲率がどの程度かを示すデータである。沿道環境とは、道路の沿道が市街地、農道、住宅地、或いは観光地であるか等のデータである。路面状態とは、その道路の路面が舗装されているか、砂利道であるか、或いは工事中で悪路とされているか等のデータである。交通状態とは、その道路が渋滞中であるか否かのデータである。
【0034】
ステップS14において、処理部23は、ステップS12の処理で評価領域に設定した道路リンクに接している道路リンクのうち、上記の判断要因(道路形態、路面状態、交通状態、沿道環境)のうちの少なくとも一つが、ステップS13の処理で特定した判断要因と類似する道路リンクが存在するか否かを判断し、類似すると判断された道路リンクが存在する場合には、この道路リンクを評価領域に加える。
【0035】
ステップS15において、処理部23は、基準道路リンクのリスク度合いを判定する。この判定処理については、後述する。
【0036】
ステップS16において、処理部23は、ステップS14の処理で、基準道路リンクと判断要因が類似する道路リンクが存在するか否かを判定する。そして、存在しない場合には(ステップS16でNO)、本処理を終了する。存在する場合には(ステップS16でYES)、ステップS17の処理において、処理部23は、この道路リンクを基準道路リンクと同一の危険度合いに設定する。その後、本処理を終了する。
【0037】
そして、上述したステップS11〜S17の処理を繰り返すことにより、地図データに含まれる各道路に対してのリスク度合いを設定し、リスク度マップを作成することができる。
【0038】
次に、図5のステップS15に示したリスク度合いの判定処理を、図6に示すフローチャートを参照して説明する。この処理では、一例として急ブレーキをかける等の危険回避行動が発生した回数及び事故発生回数と、危険回避行動が発生したときの天候に基づいて、リスク度合いを判定する場合について説明する。
【0039】
ステップS21の処理において、処理部23は、記憶部24に記憶されている車両の危険回避行動発生情報と過去に発生した事故情報とから、リスク度合いの評価領域として設定された道路リンク上における危険回避行動発生情報と事故情報とを特定する。
【0040】
ステップS22において、処理部23は、ステップS21の処理で特定した危険回避行動発生情報と事故情報とから、天候、曜日、時間帯、路面状態、交通量毎の発生分布を演算する。例えば、天候であれば、晴れ、曇り、雨、霧、雪、みぞれ、ひょう、あられといった天候条件毎に、評価領域内における危険回避行動の発生回数と事故の発生回数とをカウントし、天候条件毎の発生回数を認識する。
【0041】
ステップS23において、処理部23は、ステップS22において演算した、天候、曜日、時間帯、路面状態、交通量毎の発生分布を、ステップS22における評価領域内で発生した危険回避行動の発生回数と事故の発生回数の総和に基づいて、天候、曜日、時間帯、路面状態、交通量毎の発生頻度割合を演算する。
【0042】
その結果、例えば、図4に示すように、天候に応じた危険回避行動の発生回数、及び事故発生回数のデータを取得することができる。これにより、各判定領域(基準道路リンク及びこの道路リンクと判断要件が類似する道路リンク)において、リスク度合いを設定することができる。従って、全ての道路リンクに対して個別にリスク度合いの設定処理を行う必要が無く、リスク度合いの判定処理、即ちリスク度マップの作成処理を間便に行うことができる。
【0043】
更に、複数の判断要因の組み合せにより、リスク度合いが高くなる条件を決定する。リスク度合いの評価において演算した、天候、曜日、時間帯、路面状態、交通量毎の発生頻度割合において、発生頻度が所定の閾値より高くなる条件の組み合せを決定する。例えば、図4に示した発生頻度分布の場合では、天候=[雨または 雪]を条件として決定する。また、同様に、曜日、時間帯、路面状態、交通量についても条件を決定し、その組み合せ条件を決定する。このような処理により、リスク度合いが高くなる条件を設定することが可能となる。
【0044】
そして、リスク度合いが一定の値を超える判定領域を注意喚起対象領域に設定し、車両2がこの注意喚起対象領域に侵入或いは接近する場合には、この車両2に対して注意喚起情報を送信する。従って、対象となる車両2の車載装置31では、スピーカ51やディスプレイ52、或いは振動発生器53により、運転者に対して車両2がリスク度合いの高い道路に侵入、或いは接近していることを報知する。
【0045】
次に、判断要因が同一と見なす場合と、同一と見なさない場合の具体例を、図7〜図13を参照して説明する。
【0046】
図7は、判断要因として道路形態を設定してリスク度合いを判定する場合の第1の例を示している。図7において、道路リンクP1が基準道路リンクとして設定された場合には、この基準道路リンクP1に隣接する道路リンクP2,P3は基準道路リンクP1と道路幅がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP4は、基準道路リンクP1とは道路幅が異なるので、同一の判定領域として認識されない。従って、このような道路形態では、道路リンクP1,P2,P3が同一の判定領域に設定されるので、基準道路リンクP1に対してリスク度合いが設定されると、道路リンクP2,P3も同様のリスク度合いに設定される。つまり、道路リンクP2,P3のリスク度合いを再度設定する必要がないので、演算負荷を軽減できる。
【0047】
図8は、判断要因として道路形態を設定してリスク度合いを判定する場合の第2の例を示している。図8において、道路リンクP11が基準道路リンクとして設定された場合には、この基準道路リンクP11に隣接する道路リンクP12は道路リンクP11と道路幅がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP13は、基準道路リンクP11とは道路幅が異なるので、同一の判定領域として認識されない。更に、道路リンクP13を挟んだ道路リンクP14は、基準道路リンクP11とほぼ同一である。従って、このような道路形態では、道路リンクP11,P12,P14が同一の判定領域に設定されることになる。そして、基準道路リンクP11に対してリスク度合いが設定されると、道路リンクP12,P14も同様のリスク度合いに設定される。このように、本実施形態では、基準道路リンクP11に対して連続していない道路リンクP14についても、道路形態が類似していると認識される道路リンクは同一の判定領域として設定され、リスク度合いが設定されることになる。
【0048】
図9は、判断要因として道路形態を設定してリスク度合いを判定する場合の第3の例を示している。図9において、道路リンクP21が基準道路リンクとして設定された場合には、この基準道路リンクP21に隣接する道路リンクP22は基準道路リンクP21と同様に直線路であるので、同一の判定領域に設定される。しかし、道路リンクP23は、カーブ路であるので、同一の判定領域として認識されない。更に、道路リンクP24は、基準道路リンクP21と同様な直線路となっているので、同一の判定領域に設定される。従って、このような道路形態では、道路リンクP21,P22,P24が同一の判定領域に設定されることになる。そして、基準道路リンクP21に対してリスク度合いが設定されると、道路リンクP22,P24も同様のリスク度合いに設定される。
【0049】
なお、図7〜9では、道路形態として、道路幅、道路の曲率を例に挙げて説明したが、その他の道路形態として、道路リンクに接続される道路数、道路リンクの車線数、道路リンクに存在する信号の個数、道路リンクの制限速度、道路リンクの歩道の有無、等を設定することも可能である。
【0050】
図10は、判断要因として沿道環境を設定してリスク度合いを判定する場合の例を示している。図10において、道路リンクP31が基準道路リンクとして設定された場合には、この基準道路リンクP31に隣接する道路リンクP32は基準道路リンクP31と沿道環境が同一であるので、同一の判定領域に設定される。しかし、道路リンクP33は、沿道に住宅地が存在し、基準道路リンクP31とは沿道環境が異なるので、同一の判定領域として認識されない。従って、このような沿道環境では、道路リンクP31,P32が同一の判定領域に設定されるので、基準道路リンクP31に対してリスク度合いが設定されると、道路リンクP32も同様のリスク度合いに設定される。
【0051】
なお、沿道環境の他の例として、道路上から視認可能な物体の有無、沿道に存在する建物の種類、沿道に設置された街灯の有無、観光地の有無、等を設定することも可能である。
【0052】
図11は、判断要因として路面状態を設定してリスク度合いを判定する場合の第1の例を示している。図11において、道路リンクP41が基準道路リンクとして設定された場合には、この基準道路リンクP41に隣接する道路リンクP42は基準道路リンクP41と路面状態がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP43,P44,P45は、凍結多発地区であり、基準道路リンクP41とは路面状態が異なるので、同一の判定領域として認識されない。従って、このような道路形態では、道路リンクP41,P42が同一の判定領域に設定されることになり、基準道路リンクP41に対してリスク度合いが設定されると、道路リンクP42も同様のリスク度合いに設定される。
【0053】
図12は、判断要因として路面状態を設定してリスク度合いを判定する場合の第2の例を示している。図12において、道路リンクP51が基準道路リンクとして設定された場合には、この基準道路リンクP51に隣接する道路リンクP52は基準道路リンクP51と同様の舗装道路であり路面状態が同一であるので、同一の判定領域に設定される。しかし、道路リンクP53,P54は、砂利道であり、基準道路リンクP51とは路面状態が異なるので、同一の判定領域として認識されない。従って、このような道路形態では、道路リンクP51,P52が同一の判定領域に設定されることになり、基準道路リンクP51に対してリスク度合いが設定されると、道路リンクP52も同様のリスク度合いに設定される。
【0054】
図13は、判断要因として交通状態を設定してリスク度合いを判定する場合の例を示している。図13において、道路リンクP61が基準道路リンクとして設定された場合には、この基準道路リンクP61に隣接する道路リンクP62,P63は、基準道路リンクP61と交通状態がほぼ同一であるので、同一の判定領域に設定される。しかし、道路リンクP64は、渋滞多発地区として設定されており、基準道路リンクP61とは交通状態が異なるので、同一の判定領域として認識されない。従って、このような交通状態では、道路リンクP61〜P63が同一の判定領域に設定されることになり、基準道路リンクP61に対してリスク度合いが設定されると、道路リンクP62,P63も同様のリスク度合いに設定される。
【0055】
このようにして、本実施形態に係る運転支援装置11では、地図データに含まれる道路にリスク度合いを設定する際に、基準として設定した基準道路リンクに対して、道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも一つの判断要因が類似する道路リンクを同一の判定領域とし、同一のリスク度合いとして判断するので、リスク度合いを示すリスク度マップの作成を間便に行うことができる。従って、従来と比較して演算負荷を軽減し、且つ短時間で、各道路についてのリスク度合いを設定することができる。
【0056】
また、基準道路リンクに対して連続する道路、及び不連続とされた道路の双方について、同一の判定領域が設定されるので、より広い範囲で同一の判定領域を設定することができ、より一層演算負荷を軽減することができる。
【0057】
更に、リスク度合いが高いと判定された道路を注意喚起対象領域として設定し、車両2がこの注意喚起対象領域に侵入或いは接近した場合には、この車両2に対して注意喚起情報を送信するので、車両2の運転者に対してリスク度合いに応じた適切な注意喚起を行うことができ、運転者の注意力を高めることができる。
【0058】
また、外部入力情報として、天候情報を取得する場合には、天候情報に応じた適切な注意喚起が可能となり、より一層安全性を高めることができる。
【0059】
以上、本発明の運転支援装置を図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。
【産業上の利用可能性】
【0060】
本発明は、リスク度合いを設定するリスク度マップを間便に作成する上で有用である。
【符号の説明】
【0061】
1 情報センター
2 車両(移動体)
11 運転支援装置
21 入力部
22 通信部
23 処理部
24 記憶部
31 車載装置
41 入力部
42 通信部
43 処理部
44 情報提供部
51 スピーカ
52 ディスプレイ
53 振動発生器
221 受信部
222 送信部
【特許請求の範囲】
【請求項1】
無線通信により移動体と通信可能な基地局に設けられ、蓄積した各種の情報を前記移動体に送信して、該移動体の運転を支援する運転支援装置において、
道路に関する外部入力情報を取得する入力手段と、
前記入力手段より入力される外部入力情報に基づいて、予め設定された地図データに含まれる道路のリスク度合いを判定し、該リスク度合いと道路とを対応させたリスク度マップを作成するリスク度マップ作成手段と、
前記リスク度合いに対応した注意喚起情報を設定する注意喚起情報設定手段と、
前記地図データ、前記リスク度マップ、及び前記注意喚起情報を記憶する記憶手段と、
前記記憶手段に記憶された前記リスク度マップにて設定されるリスク度合いに応じた注意喚起情報を前記移動体に送信する送信手段と、を有し、
前記リスク度マップ作成手段は、前記地図データに含まれる道路上の任意の地点についての外部入力情報を取得した場合には、この地点についてのリスク度合いを判定すると共に、この地点の道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因に基づき、この判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする運転支援装置。
【請求項2】
前記リスク度マップ作成手段は、道路上の任意の地点についての外部入力情報を取得した際に、この任意の地点に対して連続する道路について、前記道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記リスク度マップ作成手段は、道路上の任意の地点についての外部入力情報を取得した際に、この任意の地点に対して非連続となる道路について、前記道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする請求項1に記載の運転支援装置。
【請求項4】
前記移動体の位置を認識可能な移動体位置認識手段を更に備え、
前記送信手段は、リスク度合いの高い道路に接近する移動体の存在が前記移動体位置認識手段にて認識された場合には、この移動体に対して、この道路のリスク度合いに対応する注意喚起情報を送信することを特徴とする請求項1〜請求項3のいずれか1項に記載の運転支援装置。
【請求項5】
前記注意喚起情報は、送信対象となる移動体のリスク度合いを低減するための運転支援情報を含むことを特徴とする請求項1〜請求項4のいずれか1項に記載の運転支援装置。
【請求項6】
前記入力手段は、外部入力情報として天候情報を取得し、前記リスク度マップ作成手段は、現在の天候情報に応じて前記リスク度合いを設定し、
前記注意喚起情報設定手段は、設定されたリスク度合いに応じて、注意喚起情報を変更することを特徴とする請求項1〜請求項5のいずれか1項に記載の運転支援装置。
【請求項1】
無線通信により移動体と通信可能な基地局に設けられ、蓄積した各種の情報を前記移動体に送信して、該移動体の運転を支援する運転支援装置において、
道路に関する外部入力情報を取得する入力手段と、
前記入力手段より入力される外部入力情報に基づいて、予め設定された地図データに含まれる道路のリスク度合いを判定し、該リスク度合いと道路とを対応させたリスク度マップを作成するリスク度マップ作成手段と、
前記リスク度合いに対応した注意喚起情報を設定する注意喚起情報設定手段と、
前記地図データ、前記リスク度マップ、及び前記注意喚起情報を記憶する記憶手段と、
前記記憶手段に記憶された前記リスク度マップにて設定されるリスク度合いに応じた注意喚起情報を前記移動体に送信する送信手段と、を有し、
前記リスク度マップ作成手段は、前記地図データに含まれる道路上の任意の地点についての外部入力情報を取得した場合には、この地点についてのリスク度合いを判定すると共に、この地点の道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因に基づき、この判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする運転支援装置。
【請求項2】
前記リスク度マップ作成手段は、道路上の任意の地点についての外部入力情報を取得した際に、この任意の地点に対して連続する道路について、前記道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記リスク度マップ作成手段は、道路上の任意の地点についての外部入力情報を取得した際に、この任意の地点に対して非連続となる道路について、前記道路形態、路面状態、交通状態、及び沿道環境のうちの少なくとも1つの判断要因が類似する道路に対し、前記任意の地点について判定されたリスク度合いと同一のリスク度合いに設定して、前記リスク度マップを作成することを特徴とする請求項1に記載の運転支援装置。
【請求項4】
前記移動体の位置を認識可能な移動体位置認識手段を更に備え、
前記送信手段は、リスク度合いの高い道路に接近する移動体の存在が前記移動体位置認識手段にて認識された場合には、この移動体に対して、この道路のリスク度合いに対応する注意喚起情報を送信することを特徴とする請求項1〜請求項3のいずれか1項に記載の運転支援装置。
【請求項5】
前記注意喚起情報は、送信対象となる移動体のリスク度合いを低減するための運転支援情報を含むことを特徴とする請求項1〜請求項4のいずれか1項に記載の運転支援装置。
【請求項6】
前記入力手段は、外部入力情報として天候情報を取得し、前記リスク度マップ作成手段は、現在の天候情報に応じて前記リスク度合いを設定し、
前記注意喚起情報設定手段は、設定されたリスク度合いに応じて、注意喚起情報を変更することを特徴とする請求項1〜請求項5のいずれか1項に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−8675(P2012−8675A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−142294(P2010−142294)
【出願日】平成22年6月23日(2010.6.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月23日(2010.6.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]