
運転支援装置
【課題】車線変更を考慮した適切な走行ができるように運転を支援する。
【解決手段】自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段14と、道路情報取得手段14により取得された車線変更規制区間の情報に基づいて、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段20eと、判定手段20eにより起点又は終点が存在すると判定されたら起点又は終点の情報を報知する報知手段17,18とを備える。
【解決手段】自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段14と、道路情報取得手段14により取得された車線変更規制区間の情報に基づいて、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段20eと、判定手段20eにより起点又は終点が存在すると判定されたら起点又は終点の情報を報知する報知手段17,18とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置に関する。
【背景技術】
【0002】
近年、ドライバによる車両の運転を支援する技術が開発されている。例えば、車載用のナビゲーション装置を用いた技術として、目的地を入力することにより、位置センサにより検出された車両の現在位置の検出情報と、ナビゲーション装置に内蔵された地図データとから、目的地までの適切な経路を選択して案内し、運転支援をする技術がある。
例えば特許文献1には、目的地までの経路上に存在する案内すべき分岐点に車両が近接する毎に、この分岐点に関する経路案内を行う技術が記載されている。この技術では、経路案内を行う予定の分岐点から自車位置までの間に複数の車線がある道路が含まれている場合には、案内対象の分岐先の道路に適切に進行できる推奨走行車線に案内を行う。このような制御により、不適切なタイミングでの案内を防止し、車線案内の実効性を向上させることができるとされている。
【0003】
また、特許文献2には、経路上の分岐点において例えば右折すべき案内を行うことを予定している場合、車両がその分岐点に所定の距離まで近づいた時点で車両が道路上のいずれの車線を走行しているかを判定し、判定した車線が、その分岐点において車両が右折するのに不適切な車線(すなわち、左折車線や直進車線)であると判定されると、その案内を中止する技術が記載されている。このような制御により、分岐点直前における急な車線変更を促すような案内を行うことを回避し、安全性を高めることができるとされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−18956号公報
【特許文献2】特開2006−53109号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、交差点等の分岐点の手前等に、車線変更が禁止された区間や追い越しが禁止された区間(以下、これらを総称して車線変更規制区間という)が設けられている場合がある。ドライバは、走行中の道路状況に応じて、例えば速度の遅い先行車が走行していたら追い越しをするために車線変更を行ったり、例えば速度の速い後続車が走行してきたら後続車を先行させるために車線変更を行ったり、分岐や右左折の際に目的とする側の車線に車線変更を行ったりする。しかし、この車線変更規制区間内では、ドライバは車線変更を行うことができない。
【0006】
ドライバが、車線変更規制区間が出現することを予想できずに、突然、車線変更規制区間に接近或いは進入してしまった場合には、ドライバが車線変更を途中でやめて元の車線に戻ろうとしたり、車線変更を行った後に再びもとの車線に戻ることができなかったり、思いがけない運転操作を強いられる。これは、運転を円滑に行う上では好ましくなく、また、ドライバにとっても負担となる。もしも、車線変更規制が開始される地点(車線変更規制区間の起点)を事前に把握することができれば、かかる課題を解決しうる。
【0007】
また、車線変更規制区間を走行中には、ドライバは車線変更を行うことができないため、運転にストレスを感じる状況が考えられ、車線変更規制が解除される地点(車線変更規制区間の終点)を事前に把握することができれば、かかるストレスも軽減され、ドライバはその後の車線変更を計画しながら運転を行うこともできる。
これに関して、上記の特許文献2には、分岐点の手前において車線変更規制区間(車線変更禁止帯)となっていて車線変更できない場合は、無理な車線変更を促す案内を中止するとともに、案内経路を再検索することが記載されている。
【0008】
しかしながら、上記の技術は、車両が車線変更規制区間に関する情報をドライバに事前に積極的に知らせるものではないので、上記課題を解決することはできない。
本発明はこのような課題に鑑み案出されたもので、車線変更を考慮した適切な走行ができるように車両の運転を支援する運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の運転支援装置は、自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段と、前記道路情報取得手段により取得された前記車線変更規制区間の情報に基づいて、前記自車両の走行地点の前方所定距離内に前記車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段と、前記判定手段により前記起点又は終点が存在すると判定されたら前記起点又は終点の情報を報知する報知手段とを備えることを特徴としている。
【0010】
なお、前記自車両の走行地点である現在位置を検出する現在地検出手段を備え、前記判定手段は、前記現在地検出手段により検出された前記現在位置が前記車線変更規制区間外である場合は前記起点が存在するか否かを判定し、前記現在位置が前記車線変更規制区間外である場合は前記終点が存在するか否かを判定する。
また、前記前方所定距離は、前記自車両の車速に応じて設定されることが好ましい。
【0011】
また、前記道路において前記自車両の前方を走行する先行車両を検出する他車両検出手段を備え、前記前方所定距離が、前記他車両検出手段により前記先行車両が検出された場合は前記先行車両が検出されない場合に比べて長く設定されることが好ましい。
また、前記報知手段は、前記起点又は終点の情報を表示して報知する表示手段と、前記起点又は終点の情報を所定時間のみ音声により報知する音響手段とを有することが好ましい。なお、ここでいう音響手段とは、音声(すなわち、人の声)を出力する手段(音声出力手段)やブザー音のような音を発生する手段(音発生手段)を含む。
【0012】
また、前記報知手段は、前記起点又は終点までの距離を報知することが好ましい。
もしくは、前記報知手段は、前記起点又は終点に到達するまでの時間を報知することが好ましい。
【発明の効果】
【0013】
本発明の運転支援装置によれば、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在すると判定された場合は、この起点又は終点の情報を報知するため、自車両を運転するドライバが事前に車線変更規制区間の起点又は終点の存在を認識することができる。したがって、ドライバは、車線変更ができなくなるタイミング又は車線変更ができるようになるタイミングを予め認識することができ、車線変更を考慮した適切な走行ができるように運転を支援することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る運転支援装置の全体構成を示すブロック図である。
【図2】本発明の一実施形態に係る運転支援装置を備えた自車両の構成図である。
【図3】本発明の一実施形態に係る運転支援装置での制御手順を示すメインフローチャートである。
【図4】本発明の一実施形態に係る運転支援装置での制御手順を示すサブフローチャートである。
【図5】本発明の一実施形態に係る運転支援装置での制御手順を示すサブフローチャートである。
【図6】本発明の一実施形態に係る運転支援装置での制御手順を示すサブフローチャートである。
【発明を実施するための形態】
【0015】
以下、図面により実施の形態について説明する。なお、以下に示す実施形態はあくまでも例示に過ぎず、以下の実施形態で明示しない種々の変形や技術の適用を排除する意図はない。
[1.装置構成]
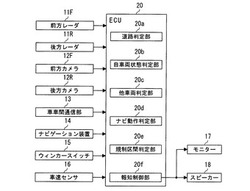
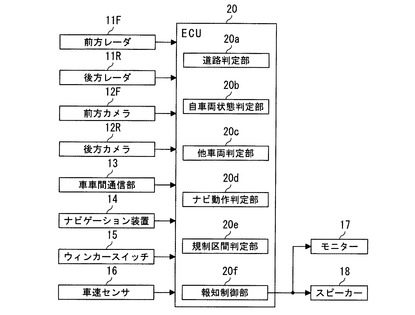
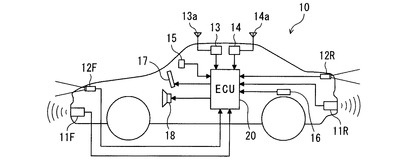
本実施形態の運転支援装置は、図2に示す自車両10に搭載される。本運転支援装置は、周囲に存在する他車両や道路形状等の走行環境に応じて運転を支援する支援制御を実施する。支援制御は、ECU(電子制御装置)20によって制御される。ここでは、ECU20の入力側及び出力側にそれぞれ接続される装置を順に説明する。
【0016】
図1及び図2に示すように、自車両10の前端部及び後端部には、それぞれレーダ11及びカメラ12が設けられる。レーダ(他車両検出手段)11は、例えば、自車両10の前端部中央及び後端部中央にそれぞれ設置されたレーザレーダやミリ波レーダ等であって、自車両10の前方及び後方にそれぞれレーザ波等を送出し、その反射波を受信することで、自車両10の前方及び後方を走行する他車両の情報を検出する。
【0017】
なお、ここで検出される他車両の情報は、例えば、他車両の有無情報や、他車両までの距離,角度(すなわち、相対位置)や速度(相対速度)等の情報である。レーダ11により検出された各情報は、随時ECU20に送信される。以下、前端部に設けられたレーダ11を前方レーダ11Fと呼び、後端部に設けられたレーダ11を後方レーダ11Rと呼び、特に区別しない場合はレーダ11と呼ぶ。また、レーダ11は、自車両10の前方及び後方を走行する他車両の情報を取得できれば、その設置場所は前端部中央及び後端部中央に限られない。
【0018】
カメラ(他車両検出手段)12は、自車両10の前方及び後方の画像を撮像するものであり、例えば、CCDカメラやCMOSカメラであって、自車両10の前端部中央及び後端部中央にそれぞれ設置される。カメラ12によって撮像された画像(静止画像)は、随時ECU20に画像データとして送信され、ECU20において各画像データに対して画像処理される。これにより、例えば、自車両10が走行する道路の情報や他車両の情報等、自車両10の前後方向の様々な情報を取得する。なお、以下、前端部に設けられたカメラ12を前方カメラ12Fと呼び、後端部に設けられたカメラ12を後方カメラ12Rと呼び、特に区別しない場合はカメラ12と呼ぶ。また、カメラ12は、自車両10の前方及び後方の情報を取得できれば、その設置場所は前端部中央及び後端部中央に限られない。
【0019】
車室内の任意の位置には、車車間通信部13,ナビゲーション装置14及びウィンカースイッチ15が設けられる。車車間通信部(他車両検出手段)13は、自車両10の周辺の他車両とアンテナ13aを介して直接、或いは中継機(図示略)を経由して通信する処理部であり、他車両の位置情報,速度情報及び操作状態(例えば、ウィンカーを出しているか等)に関する情報等を送受信する。車車間通信部13において受信された各情報は、随時ECU20に送信される。
【0020】
ナビゲーション装置(道路情報取得手段,現在地検出手段)14は、GPS衛星からアンテナ14aを介して自車両10の現在位置を検出したり、GPS,速度センサ及びジャイロスコープ等を用いて、自車両10の走行速度の検出や目的地への経路案内等を行うものである。ナビゲーション装置14には、詳細な道路情報を含んだ地図データが内蔵されている。この地図データには、例えば道路の位置や種類,レーン数,車線幅の情報や道路の車線変更規制区間(以下、単に規制区間ともいう)の情報等が含まれている。ナビゲーション装置14はECU20の入力側に接続されており、ナビゲーション装置14で検出された現在位置の情報や車線変更規制区間の情報等を含んだ道路情報は、随時ECU20に送信される。
【0021】
ウィンカースイッチ15は、自車両10の左右側方に設けられた方向指示器(ウィンカー、図示略)を操作する操作部であり、ウィンカースイッチ15の操作により左右何れかのウィンカーを点滅動作させ、自車両10の進路を合図する。また、ウィンカースイッチ15は、左右何れかのウィンカーが動作しているときに、それぞれの方向に対応するオン信号を出力し、ウィンカーが動作していないときにオフ信号を出力する(又はオン信号を出力しない)センサとしても機能する。つまり、ウィンカースイッチ15は、左折方向及び右折方向への方向指示操作の有無を検出する。ウィンカースイッチ15から出力された信号はECU20に送信される。
【0022】
また、自車両10には、自車両10の車速を検出する車速センサ16が設けられ、車速センサ16により検出された車速情報は、随時ECU20に送信される。
モニター17及びスピーカー18は、ECU20の出力装置として機能する表示手段及び音響手段であり、後述するECU20に設けられた報知制御部20fによって制御される報知手段である。モニター17は、例えば自車両10の運転席の近傍に設けられ、画面表示によりドライバに支援制御の内容や情報を報知する。また、スピーカー18は、音声(すなわち、人の声)によりドライバに支援制御の内容や情報を報知したり、ブザー音のような音でドライバに報知したりする。
【0023】
ECU20は、各種演算処理を実行するCPU、その制御に必要なプログラムやデータの記憶されたROM、CPUでの演算結果等が一時的に記憶されるRAM、外部との間で信号を入出力するための入出力ポート、制御時間をカウントするタイマー等を備えており、自車両10の走行制御を実施するものである。図1及び図2に示すように、ECU20の入力側には、レーダ11,カメラ12,車車間通信部13,ナビゲーション装置14,ウィンカースイッチ15及び車速センサ16が接続される。一方、ECU20の出力側には、モニター17及びスピーカー18が接続される。
【0024】
[2.制御構成]
[2−1.制御の概要]
本実施形態のECU20では、自車両10の走行地点(すなわち、現在位置)の前方所定距離内に、車線変更規制区間の起点又は終点が存在する場合は、この起点又は終点の存在を報知する支援制御が実施される。なお、ここでいう「車線変更規制区間」とは、車両通行帯が黄の線で区画されている区間や、自車両が走行している車両通行帯側が黄の線で区画されている区間のことであり、車線変更が禁止されている区間及び追い越しが禁止されている区間を意味する。また、車線変更規制区間の「起点」とは、車線変更規制区間が開始する位置を意味し、車線変更規制区間の「終点」とは、車線変更規制区間が終了する位置を意味する。
【0025】
[2−2.制御ブロック構成]
ECU20は、上記の制御を実現するために、道路判定部20aとしての機能要素と、自車両状態判定部20bとしての機能要素と、他車両判定部20cとしての機能要素と、ナビ動作判定部20dとしての機能要素と、規制区間判定部(判定手段)20eとしての機能要素と、報知制御部20fとしての機能要素とを有している。
【0026】
道路判定部20aは、自車両10が走行している道路が片側2車線以上の道路であるか否かを判定するものである。この道路判定部20aは、ナビゲーション装置14で検出された自車両10の位置情報を用いて、その位置情報に対応する地図データ上の道路の位置を特定する。そして、その道路のレーン数(すなわち、片側何車線の道路か)の情報をナビゲーション装置14に内蔵された地図データから読み出して判定を行う。道路判定部20aによる判定結果は、自車両状態判定部20bに伝達される。
【0027】
自車両状態判定部20bは、自車両10の現在の走行地点や走行状態等を判定するものであり、以下の3つの判定を行う。第一に、自車両状態判定部20bは、自車両10のウィンカースイッチ15から出力されたオンオフ信号を取得し、道路判定部20aの判定結果が伝達されると、ウィンカースイッチ15によりオン信号が出力されたか否かを判定する。この判定結果は、道路判定部20aの判定結果及びオン信号の検出結果に応じて、他車両判定部20c,ナビ動作判定部20d及び報知制御部20fのいずれかに伝達される。
【0028】
第二に、自車両状態判定部20bは、道路判定部20aで特定された道路の車線変更規制区間の情報をナビゲーション装置14に内蔵された地図データから読み出し、ナビゲーション装置14で検出された自車両10の位置情報から、自車両10の走行地点である現在位置が車線変更規制区間内であるか否かを判定する。また、道路判定部20aで特定された道路の車線変更規制区間の情報が読み出されなかった場合(すなわち、その道路上に車線変更規制区間がない場合)は、自車両状態判定部20bは自車両10の走行地点が車線変更規制区間外であると判定する。なお、この車線変更規制区間の情報とは、車線変更規制区間の起点及び終点の位置情報や車線変更規制区間の長さ情報等である。この判定結果は、規制区間判定部20e及び報知制御部20fに伝達される。
【0029】
第三に、自車両状態判定部20bは、イグニッションスイッチ(図示略)のオンオフ信号を常に監視し、イグニッションスイッチがオン状態かオフ状態かを判定する。
他車両判定部20cは、自車両10の周囲に他車両が存在するか否かを判定し、他車両が存在する場合は他車両と自車両10との走行速度(車速)の違いを判定するものである。この他車両判定部20cは、前方レーダ11F,前方カメラ12F及び車車間通信部13により自車両10の前方情報を取得し、この前方情報から自車両10の走行する車線において自車両10の前方を走行する先行車両が存在するか否かを判定する。さらに、先行車両が存在すると判定されると、この先行車両と自車両10との車速(相対速度)を比較し、先行車両の車速が自車両10の車速よりも遅いか否を判定する。他車両判定部20cにより先行車両の車速が自車両10の車速よりも遅いと判定されると、その結果が自車両状態判定部20bに伝達される。一方、先行車両のほうが自車両10よりも速いと判定されると、その結果が報知制御部20fに伝達される。
【0030】
また、他車両判定部20cは、後方レーダ11R,後方カメラ12R及び車車間通信部13により自車両10の後方情報を取得し、この後方情報から自車両10の走行する車線において自車両10の後方を走行する後続車両が存在するか否かを判定する。さらに、後続車両が存在すると判定されると、この後続車両と自車両10との車速(相対速度)を比較し、後続車両の車速が自車両10の車速よりも速いか否を判定する。他車両判定部20cにより後続車両の車速が自車両10の車速よりも速いと判定されると、その結果が自車両状態判定部20bに伝達される。一方、後続車両のほうが自車両10よりも遅いと判定されると、その結果が報知制御部20fに伝達される。なお、他車両判定部20cは、ここでは先行車両に対する判定を優先して行う。
【0031】
ナビ動作判定部20dは、自車両10が片側2車線以上の道路を走行中にドライバによるウィンカー操作があったときに、ナビゲーション装置14の動作情報を取得して、ナビゲーション装置14によるルート案内中であるか否かを判定するものである。また、ナビ動作判定部20dは、ルート案内中であると判定されると、ウィンカースイッチ15から出力されたオン信号とナビゲーション装置14によるルート案内の内容とを比較して、ドライバがルート案内に従ってウィンカー操作をしたか否かを判定するものである。
【0032】
ナビ動作判定部20dにより、ルート案内中ではないと判定されると、その結果が自車両状態判定部20bに伝達される。また、ドライバのウィンカー操作がルート案内に従ったものではないと判定されると、その結果も自車両状態判定部20bに伝達される。また、ナビ動作判定部20dによりドライバのウィンカー操作がルート案内に従ったものであると判定されると、その結果は報知制御部20fに伝達される。
【0033】
規制区間判定部20eは、ナビゲーション装置14で検出された自車両10の位置情報と、自車両状態判定部20bで読み出された車線変更規制区間の情報とに基づき、自車両10の走行地点の前方所定距離内に、車線変更規制区間の起点又は終点が存在するか否かを判定するものである。この規制区間判定部20eは、自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内であると判定されたら、自車両10の走行地点の前方所定距離内に車線変更規制区間の終点が存在するか否かを判定する。また、自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内ではない(車線変更規制区間外である)と判定されたら、自車両10の走行地点の前方所定距離内に車線変更規制区間の起点が存在するか否かを判定する。
【0034】
なお、規制区間判定部20eの判定で用いられる前方所定距離は、車速センサ16により検出される自車両10の車速に応じて設定される。ここでは、車速が速いほど前方所定距離が大きくなるように設定されたマップが予めECU20に記憶されており、このマップを用いて規制区間判定部20eによる判定時の車速に応じて前方所定距離が設定される。規制区間判定部20eによる判定結果は、報知制御部20fに伝達される。
【0035】
報知制御部20fは、上記の判定部20a〜20eの判定結果に応じて、モニター17及びスピーカー18によるドライバに対する報知を制御する。この報知制御部20fは、ここでは、以下の(1)〜(4)の制御を実施する。
【0036】
(1)自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内であると判定され、規制区間判定部20eにより前方所定距離内に規制区間の終点があると判定されたら、モニター17に規制区間の終点までの距離を画面表示して、ドライバに車線変更規制区間が終了するまでの距離を報知する。このとき、例えば「車線変更規制区間の終了まであとD(例えば、700m)」等と画面表示し、その距離を連続的に短くする。また、このとき、スピーカー18による音声報知は所定時間のみ実施する。
【0037】
報知制御部20fは、例えば、モニター17による報知は、規制区間の終点までの距離を報知する必要性がなくなったら終了し、スピーカー18による報知は、規制区間判定部20eによる判定後、所定のタイミング(例えば、規制区間の終点まで所定距離Dに接近した時点)で一度だけ「車線変更規制区間の終了まであとD(例えば、700m)」等と報知して、継続的な報知を行わないようにしてもよく、所定距離接近する毎に(例えば、100m単位で)報知してもよい。なお、モニター17による報知の必要性については後述のフローチャートの説明とともに説明する。
【0038】
(2)自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間外であると判定され、規制区間判定部20eにより前方所定距離内に規制区間の起点があると判定されたら、モニター17に規制区間の起点までの距離を画面表示して、ドライバに車線変更規制区間に進入するまでの距離を報知する。このとき、例えば「車線変更規制区間の起点まであとD(例えば、700m)」等と画面表示し、その距離を連続的に短くする。また、このとき、スピーカー18による音声報知は所定時間のみ実施する。
【0039】
報知制御部20fは、例えば、モニター17による報知は、規制区間の起点までの距離を報知する必要性がなくなったら終了し、スピーカー18による報知は、規制区間判定部20eによる判定後、所定のタイミング(例えば、規制区間の終点まで所定距離Dに接近した時点)で一度だけ「車線変更規制区間の起点まであとD(例えば、700m)」等と報知して、継続的な報知を行わないようにしてもよく、所定距離接近する毎に(例えば、100m単位で)報知してもよい。なお、モニター17による報知の必要性については後述のフローチャートの説明とともに説明する。
【0040】
(3)ナビ動作判定部20dによりルート案内中ではない或いはドライバのウィンカー操作がルート案内に従ったものではないと判定され、自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内であると判定されたら、モニター17に、例えば「規制区間内です。車線変更できません。」等の内容を画面表示して、ドライバに規制区間内であることを報知する。また、このとき、スピーカー18により同様の内容を音声により報知する。モニター17による報知は、自車両状態判定部20bによりウィンカースイッチ15からオフ信号が出力された(オン信号が出力されなくなった)と判定されたら終了する。また、スピーカー18による報知は一度だけ行い、継続的に実施しない。
【0041】
(4)道路判定部20aにより自車両10が片側2車線未満の車線を走行していると判定され、自車両状態判定部20bによりウィンカースイッチ15からオン信号が出力されたと判定されたら、モニター17に、例えば「対向車に注意してください。」等の内容を画面表示して、ドライバに対向車の存在に注意するよう報知する。また、このとき、スピーカー18により同様の内容を音声により報知する。モニター17による報知は、自車両状態判定部20bによりウィンカースイッチ15からオフ信号が出力されたと判定されたら終了する。また、スピーカー18による報知は一度だけ行い、継続的に実施しない。
【0042】
[3.フローチャート]
次に、図3〜図6を用いてECU20で実行される支援制御の手順の例を説明する。図4〜図6は、図3に示すメインフローチャートのサブフローチャートである。これらのフローチャートは、所定の周期T(例えば、数[ms]周期)で動作する。また、下記の各ステップは、コンピュータのハードウェアに割り当てられた各機能(手段)が、ソフトウェア(コンピュータプログラム)によって動作することによって実施される。
【0043】
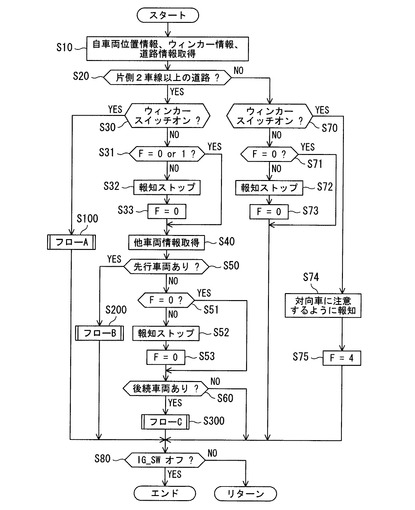
本支援制御装置は、ドライバによるイグニッションスイッチ(図示略)のオン操作が行われたら、以下の制御フローをスタートする。なお、フローチャート中のフラグFは、報知制御部20fによって実施されている報知制御のモードを示し、上記した(1)〜(4)に対応する。すなわち、フラグF=1は車線変更規制区間の終点までの距離を報知するモード、フラグF=2は車線変更規制区間の起点までの距離を報知するモード、フラグF=3は車線変更規制区間であることを報知するモード、フラグF=4は対向車に注意するよう報知するモードをそれぞれ示し、フラグF=0は報知停止モードを示す。なお、制御フローのスタート時は、フラグF=0に設定されている。
【0044】
図3に示すように、ステップS10では、ナビゲーション装置14により、自車両10の現在位置(走行地点)の情報及び自車両10が走行中の道路情報(レーン数の情報)を取得する。また、ウィンカースイッチ15によりウィンカー情報(オンオフ信号)を取得する。次に、ステップS20において、ステップS10で取得した道路情報から、自車両10が走行している道路が片側2車線以上の道路か否かが判定される。この判定は、道路判定部20aによって判定される。片側2車線以上の道路であれば、YESルートからステップS30へ進み、片側2車線未満の道路であると判定された場合は、NOルートからステップS70へ進む。
【0045】
ステップS30では、ウィンカースイッチ15によりオン信号が出力されているか否かが判定される。この判定は、自車両状態判定部20bによって判定される。ドライバによりウィンカー操作がされていればYESルートからステップS100へ進み、ウィンカー操作がされていなければNOルートからステップS31へ進む。ステップS100では、図4に示すサブフローAが実施される。すなわち、このサブフローAは、自車両10が片側2車線以上の道路を走行中にドライバによりウィンカー操作がされた場合に実施される。
【0046】
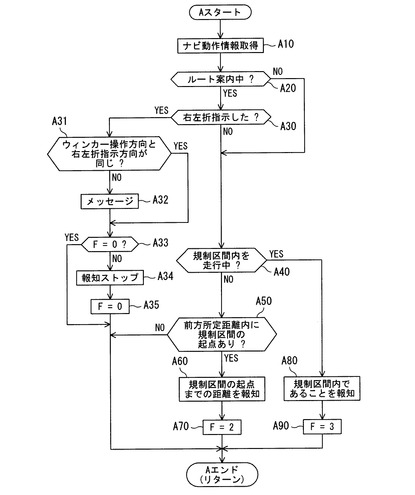
図4に示すように、ステップA10では、ナビゲーション装置14からナビ動作情報を取得する。次に、ステップA20において、ステップA10で取得したナビ動作情報から、ナビゲーション装置14によるルート案内中であるか否かが判定される。ルート案内中の場合は、YESルートからステップA30へ進み、ナビゲーション装置14により右左折指示がされているか否かが判定される(ステップA30)。これらの判定は、ナビ動作判定部20dによって判定される。
【0047】
ステップA30において、右左折指示がされていると判定されると、ステップA31において、ウィンカー操作方向(右左折方向)とナビゲーション装置14による右左折指示方向とが同じであるか否かが判定される。この方向が異なる場合は、ウィンカー操作方向が間違っているとメッセージを表示又は音声出力する(ステップA32)。一方、ウィンカー操作方向と右左折指示方向とが同じ場合は、ドライバによるウィンカー操作は、ナビゲーション装置14による指示に従ったものであるため、YESルートからステップA33へ進み、フラグFがF=0であるか否かが判定される(ステップA33)。制御フローのスタート時は、フラグF=0に設定されているため、YESルートへ進みサブフローAを終了してメインフローチャートへリターンする。一方、ステップA20においてルート案内中でないと判定された場合、及び、ステップA30において右左折指示していないと判定された場合は、いずれもNOルートからステップA40へ進む。
【0048】
ステップA40では、自車両10の走行地点が車線変更規制区間内であるか否かが判定される。この判定は、自車両状態判定部20bによって判定される。走行地点が車線変更規制区間内の場合、YESルートからステップA80へ進み、ドライバに車線変更できないことを知らせるために、モニター17やスピーカー18により規制区間内であることを報知する(ステップA80)。そして、フラグFをF=3に設定して(ステップA90)、サブフローAを終了してメインフローチャートへリターンする。
【0049】
一方、ステップA40において、走行地点が車線変更規制区間内ではないと判定されると、NOルートからステップA50へ進み、走行地点の前方所定距離内に車線変更規制区間の起点があるか否かが判定される(ステップA50)。この判定は、規制区間判定部20eによって判定される。前方所定距離内に起点がある場合は、ドライバに対して車線変更できなくなるまでの距離を知らせるために、モニター17やスピーカー18により規制区間の起点までの距離を報知する(ステップA60)。
【0050】
これにより、ドライバは、車線変更後の車線側に目的地や分岐点がある場合は車線変更をしたまま走行を続けることができ、車線変更前の車線側に目的地や分岐点がある場合は車線変更を中止することができる。そして、ステップA70においてフラグFをF=2に設定して、サブフローAを終了してメインフローチャートへリターンする。また、ステップA50において、前方所定距離内に起点がない場合は、NOルートへ進み、サブフローAを終了してメインフローチャートへリターンする。
【0051】
図4に示すサブフローAが終了すると、図3に示すステップS80へ進み、イグニッションスイッチ(IG_SW)がオフ状態であるか否かが判定される(ステップS80)。この判定は自車両状態判定部20bによって判定される。イグニッションスイッチがオフの場合はYESルートへ進み制御フローを終了し、オフでない場合はNOルートへ進みリターンして、ステップS10において再び自車両位置情報,ウィンカー情報及び道路情報を取得する。そして、ステップS20において再び片側2車線以上の道路か否かが判定される。
【0052】
ステップS20において片側2車線以上の道路であると判定され、ステップS30においてウィンカー操作がされていない(オフ信号が出力された)と判定されると、ステップS31においてフラグFがF=0又はF=1であるか否かが判定される。このとき、例えば、サブフローAのステップA60又はステップA80において報知がされている状態では、フラグFがF=2又はF=3に設定されているため、ステップS31ではNOルートへ進み、ステップS32において報知を停止する。すなわち、ステップA60及びステップA80において開始された報知は、ウィンカースイッチ15からオフ信号が出力されたら終了する。
【0053】
これは、ステップA80において規制区間内であることを報知した場合は、ドライバは車線変更できないことを認識し、ウィンカーを元に戻す(すなわち、ウィンカースイッチ15によってオフ信号が出力される)と考えられるためである。また、ステップA60において規制区間の起点までの距離を報知した場合にドライバがウィンカーを元に戻した場合は、車線変更し終わったか、車線変更を中止したかのいずれかの場合であると考えられるためである。すなわち、規制区間の起点までの距離の報知は、ウィンカー操作がオフされるまで必要であると判断され、ウィンカー操作がオフされたら不要であると判断される。
【0054】
また、ステップS30においてウィンカースイッチ15によりオン信号が出力されていると判定されると、再びステップS100へ進み、図4のサブフローAが実施される。このとき、ステップA20,ステップA30及びステップA31において、ウィンカー操作がナビゲーション装置14のルート案内に従ったものであると判定され、ウィンカー操作方向と右左折指示方向とが同じであると判定されると(すなわち、ステップA30からYESルートへ進み、ステップA31からYESルートへ進むと)、ステップA33においてフラグFがF=0であるか否かが判定される。前回の制御周期において、フラグFがF=2又はF=3に設定されている場合は、ステップA33からNOルートへ進み、ステップA34においてそのとき実施している報知を停止する。
【0055】
すなわち、ドライバによるウィンカー操作がナビゲーション装置14による案内に従ったものである場合は、規制区間の起点までの距離の報知は不要であると判断されて報知を停止する。ステップS32又はステップA34において報知が停止されると、フラグFがF=0にリセットされる(ステップS33又はステップA35)。ステップS33においてフラグF=0に設定されたら、ステップS40へ進む。また、ステップA35においてフラグがリセットされたら、サブフローAを終了してメインフローチャートへリターンする。
【0056】
一方、ステップS31においてフラグFがF=0又はF=1であると判定されると、YESルートからステップS40へ進む。ステップS40では、レーダ11,カメラ12及び車車間通信部13により他車両の情報を取得する。次に、ステップS50において、ステップS40で取得した他車両の情報から、自車両10に先行する先行車両が存在するか否かが判定される。この判定は、他車両判定部20cによって判定される。先行車両が存在すれば、YESルートからステップS200へ進み、先行車両が存在しない場合はNOルートからステップS51へ進む。ステップS200では、図5に示すサブフローBが実施される。すなわち、このサブフローBは、自車両10が片側2車線以上の道路を走行中であって、ドライバによるウィンカー操作がされておらず、自車両10の前方に先行車両が存在する場合に実施される。
【0057】
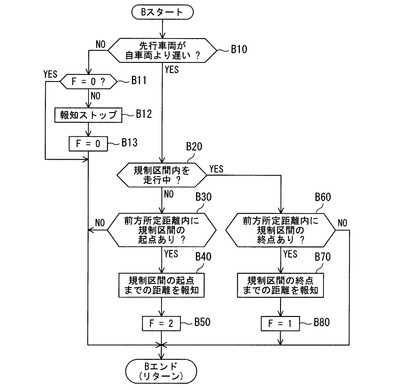
図5に示すように、ステップB10では、自車両10の車速と先行車両の車速とを比較し、先行車両が自車両10よりも遅いか否かが判定される。この判定も他車両判定部20cによって判定される。先行車両が自車両10よりも遅い場合は、YESルートからステップB20へ進み、自車両10の走行地点が車線変更規制区間内であるか否かが判定される(ステップB20)。走行地点が車線変更規制区間内の場合、ステップB60において走行地点の前方所定距離内に車線変更規制区間の終点があるか否かが判定される。前方所定距離内に終点がある場合は、ドライバに対して車線変更可能となる距離を知らせるために、モニター17やスピーカー18により規制区間の終点までの距離を報知する(ステップB70)。そして、フラグFをF=1に設定して(ステップB80)、サブフローBを終了してメインフローチャートへリターンする。
【0058】
一方、ステップB20において、走行地点が車線変更規制区間内ではないと判定されると、ステップB30において走行地点の前方所定距離内に車線変更規制区間の起点があるか否かが判定される。前方所定距離内に起点がある場合は、モニター17やスピーカー18により規制区間の起点までの距離を報知し(ステップB40)、フラグFをF=2に設定して(ステップB50)、サブフローBを終了してメインフローチャートへリターンする。なお、ステップB60において前方所定距離内に終点がない場合、及び、ステップB30において前方所定距離内に起点がない場合は、それぞれNOルートへ進み、サブフローBを終了してメインフローチャートへリターンする。
【0059】
また、ステップB10において、先行車両が自車両10よりも速いと判定された場合は、NOルートからステップB11へ進み、フラグFがF=0であるか否かが判定される(ステップB11)。フラグFがF=0の場合は、YESルートへ進みサブフローBを終了してメインフローチャートへリターンする。一方、モニター17又はスピーカー18により、規制区間の起点までの距離や規制区間の終点までの距離を報知している場合は、NOルートからステップB12へ進み、その報知を停止して(ステップB12)、フラグFをF=0にリセットし(ステップB13)、サブフローBを終了してメインフローチャートへリターンする。すなわち、先行車両の車速が自車両10よりも速い場合は、規制区間の起点又は終点までの距離を報知する必要がないと判断され、サブフローBを終了してメインフローチャートへリターンする。
【0060】
図5に示すサブフローBが終了すると、図3に示すステップS80へ進み、イグニッションスイッチ(IG_SW)がオフ状態であるか否かが判定され(ステップS80)、オフの場合は制御を終了し、オフでない場合はリターンしてステップS10からの制御が再び実施される。ステップS10において自車両位置情報,ウィンカー情報及び道路情報を取得し、ステップS20において片側2車線以上の道路か否かが判定される。
【0061】
ステップS20において片側2車線以上の道路であると判定され、ステップS30においてウィンカー操作がされていないと判定されると、ステップS31においてフラグFがF=0又はF=1であるか否かが判定される。このとき、例えば、サブフローBのステップB40の報知がされている状態ではフラグFがF=2に設定されているため、ステップS32において報知を停止する。
【0062】
つまり、自車両10の前方に、自車両10よりも遅い先行車両が存在する場合であって、自車両10の走行地点の前方所定距離内に車線変更規制区間の起点がある場合は、ドライバに対してその起点までの距離を報知することにより車線変更を促す、若しくは、車線変更せずにそのまま追従走行するよう促すことができる。ドライバが車線変更する場合はウィンカー操作するため、ステップS30においてYESルートからステップS100へ進む。この場合は、図4に示すサブフローAの制御が上記したように実施される。また、ドライバが車線変更しない場合はウィンカー操作はされないため、ステップS32へ進み、起点までの距離の報知を停止し、支援制御の煩わしさを回避する。
【0063】
また、例えば、サブフローBのステップB70の報知がされている状態ではフラグFがF=1に設定されているため報知が停止されることなく、ステップS40において他車両情報を取得し、ステップS50において先行車両の有無が判定される。先行車両が存在する場合は、ステップS200へ進み、図5に示す上記したサブフローBの制御が再び実施される。一方、先行車両が存在しなくなった場合は、ステップS51へ進み、フラグFがF=0であるか否かが判定される(ステップS51)。
【0064】
このとき、規制区間の終点までの距離を報知している場合は、フラグFがF=1に設定されているため、ステップS52において報知を停止し、フラグFがF=0にリセットされる(ステップS53)。すなわち、ドライバによるウィンカー操作がされておらず、自車両10の前方に先行車両も存在しない場合は、規制区間の起点までの距離を報知する必要性がないため、何ら報知を行わない。これにより、支援制御の煩わしさを回避する。
【0065】
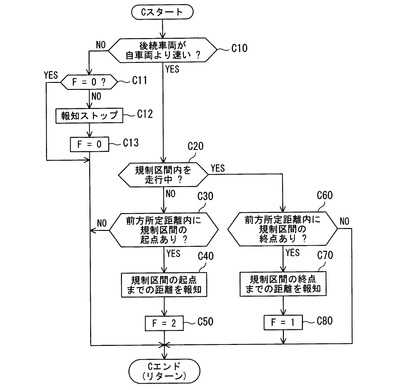
ステップS51においてフラグFがF=0であると判定された場合、又はステップS53においてフラグFがF=0にリセットされた場合は、ステップS60において、ステップS40で取得した他車両の情報から、自車両10に追従する後続車両が存在するか否かが判定される。この判定は、他車両判定部20cによって判定される。後続車両が存在すれば、YESルートからステップS300へ進み、後続車両が存在しない場合はNOルートからステップS80へ進む。ステップS300では、図6に示すサブフローCが実施される。すなわち、このサブフローCは、自車両10が片側2車線以上の道路を走行中であって、ドライバによるウィンカー操作がされておらず、自車両10の前方に先行車両は存在しないが後方に後続車両が存在する場合に実施される。
【0066】
図6に示すように、ステップC10では、自車両10の車速と後続車両の車速とを比較し、後続車両が自車両10よりも速いか否かが判定される。この判定も他車両判定部20cによって判定される。後続車両が自車両10よりも速い場合は、YESルートからステップC20へ進み、自車両10の走行地点が車線変更規制区間内であるか否かが判定される(ステップC20)。走行地点が車線変更規制区間内の場合、ステップC60において走行地点の前方所定距離内に車線変更規制区間の終点があるか否かが判定される。前方所定距離内に終点がある場合は、ドライバに対して車線変更可能となる距離を知らせるために、モニター17やスピーカー18により規制区間の終点までの距離を報知する(ステップC70)。そして、フラグFをF=1に設定して(ステップC80)、サブフローCを終了してメインフローチャートへリターンする。
【0067】
一方、ステップC20において、走行地点が車線変更規制区間内ではないと判定されると、ステップC30において走行地点の前方所定距離内に車線変更規制区間の起点があるか否かが判定される。前方所定距離内に起点がある場合は、モニター17やスピーカー18により規制区間の起点までの距離を報知し(ステップC40)、フラグFをF=2に設定して(ステップC50)、サブフローCを終了してメインフローチャートへリターンする。なお、ステップC60において前方所定距離内に終点がない場合、及び、ステップC30において前方所定距離内に起点がない場合は、それぞれNOルートへ進み、サブフローCを終了してメインフローチャートへリターンする。
【0068】
また、ステップC10において、後続車両が自車両10よりも遅いと判定された場合は、NOルートからステップC11へ進み、フラグFがF=0であるか否かが判定される(ステップC11)。フラグFがF=0の場合は、YESルートへ進みサブフローCを終了してメインフローチャートへリターンする。一方、モニター17又はスピーカー18により、規制区間の起点までの距離や規制区間の終点までの距離を報知している場合は、NOルートからステップC12へ進み、その報知を停止して(ステップC12)、フラグFをF=0にリセットし(ステップC13)、サブフローCを終了してメインフローチャートへリターンする。すなわち、後続車両の車速が自車両10よりも速い場合は、規制区間の起点又は終点までの報知を終了する。
【0069】
図6に示すサブフローCが終了すると、図3に示すステップS80へ進み、イグニッションスイッチ(IG_SW)がオフ状態であるか否かが判定され(ステップS80)、オフの場合は制御を終了し、オフでない場合はリターンする。一方、ステップS60において後続車両が存在しないと判定されたら、ステップS80の判定へ進み、制御フローを終了するかリターンする。
【0070】
以上が自車両10の走行地点が片側2車線以上の道路の場合であるが、ステップS20において、走行地点が片側2車線未満の道路であると判定されると、NOルートからステップS70へ進み、ステップS70においてウィンカースイッチ15によりオン信号が出力されたか否かが判定される。オン信号が出力された場合は、ステップS74においてモニター17やスピーカー18により対向車に注意するよう報知し、ステップS75においてフラグFがF=4に設定され、ステップS80へ進む。
【0071】
一方、ステップS70においてオン信号が出力されていない場合(オフ信号が出力された場合)は、ステップS71においてフラグFがF=0であるか否かが判定される。フラグFがF=0の場合は、YESルートからステップS80へ進む。一方、例えば前回の制御周期においてステップS74の報知を行っている場合は、NOルートからステップS72へ進み、その報知を停止して(ステップS72)、フラグFをF=0にリセットし(ステップS73)、ステップS80へ進む。
この支援制御は、ステップS80においてイグニッションスイッチがオフになったと判定されるまで繰り返し実施される。
【0072】
[4.効果]
したがって、本実施形態に係る運転支援装置によれば、自車両10の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在すると判定された場合は、この起点又は終点の情報を報知するため、自車両10を運転するドライバが事前に車線変更規制区間の起点又は終点の存在を認識することができる。したがって、ドライバは、車線変更ができなくなるタイミング又は車線変更ができるようになるタイミングを予め把握することができ、ドライバに対して車線変更を考慮した適切な走行ができるように運転を支援することができる。
【0073】
すなわち、例えば、自車両10が車線変更規制区間ではない道路を走行している場合、ドライバに対して車線変更規制区間の起点の情報を報知することにより、車線変更規制区間が存在することを知らせることができる。これにより、走行中の車線とは別の車線が目的地に行くために適しているのであれば早めに車線変更するように促すことができ、車線変更することなく走行中の車線が目的地に行くために適しているのであれば不必要な車線変更を中止するよう促すことができる。そのため、無駄な車線変更を回避でき、運転操作が煩雑になることを防ぐことができる。また、自車両10が車線変更規制区間内を走行している場合、ドライバに対して車線変更規制区間の終点の情報を報知することにより、車線変更が可能となる区間が前方所定距離内にあることを知らせることができる。そのため、ドライバが早く車線変更したいと考えている場合は、所定距離走行したら車線変更できると認識できるため、車線変更が可能の地点までストレスを感じることなく安心して走行することができる。
【0074】
また、ここでは、走行地点の前方所定距離が、自車両10の車速が速いほど長く、車速が遅いほど短く設定される(すなわち、前方所定距離が車速に応じて設定される)ため、ドライバに対する起点又は終点の報知を適切なタイミングで行うことができる。これにより、ドライバに対する適切な運転支援をすることができる。
また、報知手段として、車線変更規制区間の起点又は終点の情報を画面表示して報知するモニター17と、起点又は終点の情報を音声により報知するスピーカー18とを備えているため、ドライバが視覚及び聴覚によって確実に報知内容を知ることができる。また、モニター17による報知は、報知する必要性がなくなったと判断されるまで継続して実施されるが、スピーカー18による報知は、所定時間のみ行われ、継続して実施されないため、報知の煩わしさを回避し、過剰な支援制御となることを防ぐことができる。
【0075】
また、モニター17及びスピーカー18によって、車線変更規制区間の起点又は終点までの距離を報知するため、ドライバがあとどのくらい走行すれば起点又は終点に到達するか直感的に知ることができる。これにより、より適切な運転を支援することができる。
【0076】
[5.変形例]
以上、本発明の実施形態を説明したが、本発明は上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形することが可能である。
【0077】
上記実施形態では、自車両10の走行地点の前方所定距離を、自車両10の車速に応じて設定したが、前方所定距離の設定方法はこれに限られない。例えば、自車両10の車速に応じて設定することに加え、レーダ11やカメラ12、車車間通信部13により先行車両を検出した場合は、先行車両がいない場合に比べて前方所定距離を長く設定してもよい。先行車両がいる場合は、より速く車線変更規制区間の起点又は終点の情報を報知することにより、ドライバに対して先行車両と車線変更とを考慮した適切な走行を支援することができる。
【0078】
また、自車両10の車速に応じて設定することに代えて、先行車両の有無により前方所定距離を設定してもよい。また、車速や先行車両の有無に関わらず、前方所定距離を予め一定の値に設定しておいてもよい。この場合、前方所定距離を変更する必要がないため、制御を簡素にすることができる。
また、上記実施形態では、前方所定距離を車速に応じて設定する際にマップを用いているが、これに限られず、例えば、車速に応じて設定する際に予め設定された数式等を用いるようにしてもよい。
【0079】
また、上記実施形態では、片側2車線未満の道路を走行している場合は、図3のステップS20の判定においてNOとなり、ステップS70においてウィンカー操作がされていると判定されると対向車に注意するようにドライバに報知する構成となっている。しかし、本運転支援制御装置は、片側2車線以上の道路に限られず、例えば片側1車線の道路や山道等を走行している場合にも適用可能である。
【0080】
例えば、片側1車線の道路を走行中、自車両よりも速度が遅い先行車両がいる場合、自車両の走行地点が追い越し禁止区間内であると判定されたら、追い越し禁止区間の終点をドライバに報知することにより、ドライバがあとどの程度走行すれば先行車両を追い越すことができるか事前に把握することができるため、ストレスを抑制することができる。
また、例えば、片側1車線の道路や山道を走行中、自車両よりも速度が速い後続車両がいる場合、自車両の走行地点が追い越し禁止区間内であると判定されたら、追い越し禁止区間の終点をドライバに報知することにより、終点までの距離が長い場合は路肩等の避難所へ待避して後続車両を先に行かせることができる。また、終点までの距離が短い場合はそのまま走行を続け、追い越し禁止区間が終了したら側方へ避けて後続車両に追い越してもらうことができる。
【0081】
また、上記実施形態では、自車両10の前方及び後方の情報を検出する手段として、レーダ11,カメラ12及び車車間通信部13を用いたが、例えば、ステレオカメラのみを設置して、レーダ及び車車間通信部は設けなくてもよい。また、2つのCCDカメラを自車両10の前方及び後方にそれぞれ配置してステレオカメラと同様の情報を得られるようにして、レーダ及び車車間通信部を省略してもよい。この場合、その設置場所は中央ではなく、車幅方向中央を中心線として線対称に設けられることが好ましい。ステレオカメラや2つのCCDカメラを用いた場合であっても、前後方向の距離を検出することができる。なお、1つのCCDカメラでも遠近距離を検出することができるものであれば、CCDカメラは1つでもよい。また、カメラ12及び車車間通信部13を設けず、レーダ11のみを設けてもよい。先行車両と後続車両の有無情報及び速度情報はレーダ11を走査することにより取得可能である。
【0082】
また、上記実施形態では、他車両判定部20cが先行車両に対する判定を優先しており、図3のステップS40で取得した他車両情報に基づいて、まず先行車両の有無を判定し、先行車両の速度に応じて報知するか否かの判定を実施しているが、他車両判定部20cが後続車両に対する判定を優先して行ってもよい。
また、上記実施形態では、先行車両及び後続車両がいない場合は、ドライバによるウィンカー操作をトリガとして、走行地点が規制区間内か否かの判定を行い、過剰な支援にならないように構成されている。この構成に加え、規制区間の起点又は終点の情報をドライバが自由に得られるように、規制区間確認スイッチを、例えば運転席の近傍に設けてもいい。
【0083】
この規制区間確認スイッチは、ドライバによるオン操作がされると、自車両状態判定部20bにより自車両10の走行地点が規制区間内であるか否かが判定され、規制区間内であれば、規制区間判定部20eにより走行地点の前方所定距離内に規制区間の終点があるか否かが判定される。また、規制区間外であれば、規制区間判定部20eにより走行地点の前方所定距離内に規制区間の起点があるか否かが判定される。これらの判定の結果、起点又は終点が存在すれば、その起点又は終点までの距離を報知する。このような構成により、ドライバに対して任意のタイミングで車線変更ができるタイミングとできなくなるタイミングを知らせることができる。
【0084】
また、上記の実施形態では、モニター17及びスピーカー18により規制区間の起点又は終点までの距離を報知したが、距離ではなく起点又は終点に到達するまでの時間を報知するように構成してもよい。起点又は終点に到達するまでの距離よりも、その距離を車速センサで検出した車速で除して時間に換算することにより、計算過程が増えるものの、ドライバがより直感的にどの程度で起点又は終点に到達するのかを理解することができる。
【0085】
また、上記実施形態では、報知手段としてモニター17及びスピーカー18の両方を設けているが、何れか一方でもよい。また、モニター17はナビゲーション装置14の画面と併用してもよく、スピーカー18の代わりにナビゲーション装置14に内蔵される音響装置を利用してもよい。
なお、上記実施形態で説明した自車両10は、自動車やトラックやバス等、特に限定されない。
【符号の説明】
【0086】
10 自車両
11 レーダ(他車両検出手段)
12 カメラ(他車両検出手段)
13 車車間通信部(他車両検出手段)
14 ナビゲーション装置(道路情報取得手段,現在地検出手段)
15 ウィンカースイッチ
16 車速センサ
17 モニター(表示手段,報知手段)
18 スピーカー(音響手段,報知手段)
20 ECU(電子制御装置)
20a 道路判定部
20b 自車両状態判定部
20c 他車両判定部
20d ナビ動作判定部
20e 規制区間判定部(判定手段)
20f 報知制御部
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置に関する。
【背景技術】
【0002】
近年、ドライバによる車両の運転を支援する技術が開発されている。例えば、車載用のナビゲーション装置を用いた技術として、目的地を入力することにより、位置センサにより検出された車両の現在位置の検出情報と、ナビゲーション装置に内蔵された地図データとから、目的地までの適切な経路を選択して案内し、運転支援をする技術がある。
例えば特許文献1には、目的地までの経路上に存在する案内すべき分岐点に車両が近接する毎に、この分岐点に関する経路案内を行う技術が記載されている。この技術では、経路案内を行う予定の分岐点から自車位置までの間に複数の車線がある道路が含まれている場合には、案内対象の分岐先の道路に適切に進行できる推奨走行車線に案内を行う。このような制御により、不適切なタイミングでの案内を防止し、車線案内の実効性を向上させることができるとされている。
【0003】
また、特許文献2には、経路上の分岐点において例えば右折すべき案内を行うことを予定している場合、車両がその分岐点に所定の距離まで近づいた時点で車両が道路上のいずれの車線を走行しているかを判定し、判定した車線が、その分岐点において車両が右折するのに不適切な車線(すなわち、左折車線や直進車線)であると判定されると、その案内を中止する技術が記載されている。このような制御により、分岐点直前における急な車線変更を促すような案内を行うことを回避し、安全性を高めることができるとされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−18956号公報
【特許文献2】特開2006−53109号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、交差点等の分岐点の手前等に、車線変更が禁止された区間や追い越しが禁止された区間(以下、これらを総称して車線変更規制区間という)が設けられている場合がある。ドライバは、走行中の道路状況に応じて、例えば速度の遅い先行車が走行していたら追い越しをするために車線変更を行ったり、例えば速度の速い後続車が走行してきたら後続車を先行させるために車線変更を行ったり、分岐や右左折の際に目的とする側の車線に車線変更を行ったりする。しかし、この車線変更規制区間内では、ドライバは車線変更を行うことができない。
【0006】
ドライバが、車線変更規制区間が出現することを予想できずに、突然、車線変更規制区間に接近或いは進入してしまった場合には、ドライバが車線変更を途中でやめて元の車線に戻ろうとしたり、車線変更を行った後に再びもとの車線に戻ることができなかったり、思いがけない運転操作を強いられる。これは、運転を円滑に行う上では好ましくなく、また、ドライバにとっても負担となる。もしも、車線変更規制が開始される地点(車線変更規制区間の起点)を事前に把握することができれば、かかる課題を解決しうる。
【0007】
また、車線変更規制区間を走行中には、ドライバは車線変更を行うことができないため、運転にストレスを感じる状況が考えられ、車線変更規制が解除される地点(車線変更規制区間の終点)を事前に把握することができれば、かかるストレスも軽減され、ドライバはその後の車線変更を計画しながら運転を行うこともできる。
これに関して、上記の特許文献2には、分岐点の手前において車線変更規制区間(車線変更禁止帯)となっていて車線変更できない場合は、無理な車線変更を促す案内を中止するとともに、案内経路を再検索することが記載されている。
【0008】
しかしながら、上記の技術は、車両が車線変更規制区間に関する情報をドライバに事前に積極的に知らせるものではないので、上記課題を解決することはできない。
本発明はこのような課題に鑑み案出されたもので、車線変更を考慮した適切な走行ができるように車両の運転を支援する運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の運転支援装置は、自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段と、前記道路情報取得手段により取得された前記車線変更規制区間の情報に基づいて、前記自車両の走行地点の前方所定距離内に前記車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段と、前記判定手段により前記起点又は終点が存在すると判定されたら前記起点又は終点の情報を報知する報知手段とを備えることを特徴としている。
【0010】
なお、前記自車両の走行地点である現在位置を検出する現在地検出手段を備え、前記判定手段は、前記現在地検出手段により検出された前記現在位置が前記車線変更規制区間外である場合は前記起点が存在するか否かを判定し、前記現在位置が前記車線変更規制区間外である場合は前記終点が存在するか否かを判定する。
また、前記前方所定距離は、前記自車両の車速に応じて設定されることが好ましい。
【0011】
また、前記道路において前記自車両の前方を走行する先行車両を検出する他車両検出手段を備え、前記前方所定距離が、前記他車両検出手段により前記先行車両が検出された場合は前記先行車両が検出されない場合に比べて長く設定されることが好ましい。
また、前記報知手段は、前記起点又は終点の情報を表示して報知する表示手段と、前記起点又は終点の情報を所定時間のみ音声により報知する音響手段とを有することが好ましい。なお、ここでいう音響手段とは、音声(すなわち、人の声)を出力する手段(音声出力手段)やブザー音のような音を発生する手段(音発生手段)を含む。
【0012】
また、前記報知手段は、前記起点又は終点までの距離を報知することが好ましい。
もしくは、前記報知手段は、前記起点又は終点に到達するまでの時間を報知することが好ましい。
【発明の効果】
【0013】
本発明の運転支援装置によれば、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在すると判定された場合は、この起点又は終点の情報を報知するため、自車両を運転するドライバが事前に車線変更規制区間の起点又は終点の存在を認識することができる。したがって、ドライバは、車線変更ができなくなるタイミング又は車線変更ができるようになるタイミングを予め認識することができ、車線変更を考慮した適切な走行ができるように運転を支援することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る運転支援装置の全体構成を示すブロック図である。
【図2】本発明の一実施形態に係る運転支援装置を備えた自車両の構成図である。
【図3】本発明の一実施形態に係る運転支援装置での制御手順を示すメインフローチャートである。
【図4】本発明の一実施形態に係る運転支援装置での制御手順を示すサブフローチャートである。
【図5】本発明の一実施形態に係る運転支援装置での制御手順を示すサブフローチャートである。
【図6】本発明の一実施形態に係る運転支援装置での制御手順を示すサブフローチャートである。
【発明を実施するための形態】
【0015】
以下、図面により実施の形態について説明する。なお、以下に示す実施形態はあくまでも例示に過ぎず、以下の実施形態で明示しない種々の変形や技術の適用を排除する意図はない。
[1.装置構成]
本実施形態の運転支援装置は、図2に示す自車両10に搭載される。本運転支援装置は、周囲に存在する他車両や道路形状等の走行環境に応じて運転を支援する支援制御を実施する。支援制御は、ECU(電子制御装置)20によって制御される。ここでは、ECU20の入力側及び出力側にそれぞれ接続される装置を順に説明する。
【0016】
図1及び図2に示すように、自車両10の前端部及び後端部には、それぞれレーダ11及びカメラ12が設けられる。レーダ(他車両検出手段)11は、例えば、自車両10の前端部中央及び後端部中央にそれぞれ設置されたレーザレーダやミリ波レーダ等であって、自車両10の前方及び後方にそれぞれレーザ波等を送出し、その反射波を受信することで、自車両10の前方及び後方を走行する他車両の情報を検出する。
【0017】
なお、ここで検出される他車両の情報は、例えば、他車両の有無情報や、他車両までの距離,角度(すなわち、相対位置)や速度(相対速度)等の情報である。レーダ11により検出された各情報は、随時ECU20に送信される。以下、前端部に設けられたレーダ11を前方レーダ11Fと呼び、後端部に設けられたレーダ11を後方レーダ11Rと呼び、特に区別しない場合はレーダ11と呼ぶ。また、レーダ11は、自車両10の前方及び後方を走行する他車両の情報を取得できれば、その設置場所は前端部中央及び後端部中央に限られない。
【0018】
カメラ(他車両検出手段)12は、自車両10の前方及び後方の画像を撮像するものであり、例えば、CCDカメラやCMOSカメラであって、自車両10の前端部中央及び後端部中央にそれぞれ設置される。カメラ12によって撮像された画像(静止画像)は、随時ECU20に画像データとして送信され、ECU20において各画像データに対して画像処理される。これにより、例えば、自車両10が走行する道路の情報や他車両の情報等、自車両10の前後方向の様々な情報を取得する。なお、以下、前端部に設けられたカメラ12を前方カメラ12Fと呼び、後端部に設けられたカメラ12を後方カメラ12Rと呼び、特に区別しない場合はカメラ12と呼ぶ。また、カメラ12は、自車両10の前方及び後方の情報を取得できれば、その設置場所は前端部中央及び後端部中央に限られない。
【0019】
車室内の任意の位置には、車車間通信部13,ナビゲーション装置14及びウィンカースイッチ15が設けられる。車車間通信部(他車両検出手段)13は、自車両10の周辺の他車両とアンテナ13aを介して直接、或いは中継機(図示略)を経由して通信する処理部であり、他車両の位置情報,速度情報及び操作状態(例えば、ウィンカーを出しているか等)に関する情報等を送受信する。車車間通信部13において受信された各情報は、随時ECU20に送信される。
【0020】
ナビゲーション装置(道路情報取得手段,現在地検出手段)14は、GPS衛星からアンテナ14aを介して自車両10の現在位置を検出したり、GPS,速度センサ及びジャイロスコープ等を用いて、自車両10の走行速度の検出や目的地への経路案内等を行うものである。ナビゲーション装置14には、詳細な道路情報を含んだ地図データが内蔵されている。この地図データには、例えば道路の位置や種類,レーン数,車線幅の情報や道路の車線変更規制区間(以下、単に規制区間ともいう)の情報等が含まれている。ナビゲーション装置14はECU20の入力側に接続されており、ナビゲーション装置14で検出された現在位置の情報や車線変更規制区間の情報等を含んだ道路情報は、随時ECU20に送信される。
【0021】
ウィンカースイッチ15は、自車両10の左右側方に設けられた方向指示器(ウィンカー、図示略)を操作する操作部であり、ウィンカースイッチ15の操作により左右何れかのウィンカーを点滅動作させ、自車両10の進路を合図する。また、ウィンカースイッチ15は、左右何れかのウィンカーが動作しているときに、それぞれの方向に対応するオン信号を出力し、ウィンカーが動作していないときにオフ信号を出力する(又はオン信号を出力しない)センサとしても機能する。つまり、ウィンカースイッチ15は、左折方向及び右折方向への方向指示操作の有無を検出する。ウィンカースイッチ15から出力された信号はECU20に送信される。
【0022】
また、自車両10には、自車両10の車速を検出する車速センサ16が設けられ、車速センサ16により検出された車速情報は、随時ECU20に送信される。
モニター17及びスピーカー18は、ECU20の出力装置として機能する表示手段及び音響手段であり、後述するECU20に設けられた報知制御部20fによって制御される報知手段である。モニター17は、例えば自車両10の運転席の近傍に設けられ、画面表示によりドライバに支援制御の内容や情報を報知する。また、スピーカー18は、音声(すなわち、人の声)によりドライバに支援制御の内容や情報を報知したり、ブザー音のような音でドライバに報知したりする。
【0023】
ECU20は、各種演算処理を実行するCPU、その制御に必要なプログラムやデータの記憶されたROM、CPUでの演算結果等が一時的に記憶されるRAM、外部との間で信号を入出力するための入出力ポート、制御時間をカウントするタイマー等を備えており、自車両10の走行制御を実施するものである。図1及び図2に示すように、ECU20の入力側には、レーダ11,カメラ12,車車間通信部13,ナビゲーション装置14,ウィンカースイッチ15及び車速センサ16が接続される。一方、ECU20の出力側には、モニター17及びスピーカー18が接続される。
【0024】
[2.制御構成]
[2−1.制御の概要]
本実施形態のECU20では、自車両10の走行地点(すなわち、現在位置)の前方所定距離内に、車線変更規制区間の起点又は終点が存在する場合は、この起点又は終点の存在を報知する支援制御が実施される。なお、ここでいう「車線変更規制区間」とは、車両通行帯が黄の線で区画されている区間や、自車両が走行している車両通行帯側が黄の線で区画されている区間のことであり、車線変更が禁止されている区間及び追い越しが禁止されている区間を意味する。また、車線変更規制区間の「起点」とは、車線変更規制区間が開始する位置を意味し、車線変更規制区間の「終点」とは、車線変更規制区間が終了する位置を意味する。
【0025】
[2−2.制御ブロック構成]
ECU20は、上記の制御を実現するために、道路判定部20aとしての機能要素と、自車両状態判定部20bとしての機能要素と、他車両判定部20cとしての機能要素と、ナビ動作判定部20dとしての機能要素と、規制区間判定部(判定手段)20eとしての機能要素と、報知制御部20fとしての機能要素とを有している。
【0026】
道路判定部20aは、自車両10が走行している道路が片側2車線以上の道路であるか否かを判定するものである。この道路判定部20aは、ナビゲーション装置14で検出された自車両10の位置情報を用いて、その位置情報に対応する地図データ上の道路の位置を特定する。そして、その道路のレーン数(すなわち、片側何車線の道路か)の情報をナビゲーション装置14に内蔵された地図データから読み出して判定を行う。道路判定部20aによる判定結果は、自車両状態判定部20bに伝達される。
【0027】
自車両状態判定部20bは、自車両10の現在の走行地点や走行状態等を判定するものであり、以下の3つの判定を行う。第一に、自車両状態判定部20bは、自車両10のウィンカースイッチ15から出力されたオンオフ信号を取得し、道路判定部20aの判定結果が伝達されると、ウィンカースイッチ15によりオン信号が出力されたか否かを判定する。この判定結果は、道路判定部20aの判定結果及びオン信号の検出結果に応じて、他車両判定部20c,ナビ動作判定部20d及び報知制御部20fのいずれかに伝達される。
【0028】
第二に、自車両状態判定部20bは、道路判定部20aで特定された道路の車線変更規制区間の情報をナビゲーション装置14に内蔵された地図データから読み出し、ナビゲーション装置14で検出された自車両10の位置情報から、自車両10の走行地点である現在位置が車線変更規制区間内であるか否かを判定する。また、道路判定部20aで特定された道路の車線変更規制区間の情報が読み出されなかった場合(すなわち、その道路上に車線変更規制区間がない場合)は、自車両状態判定部20bは自車両10の走行地点が車線変更規制区間外であると判定する。なお、この車線変更規制区間の情報とは、車線変更規制区間の起点及び終点の位置情報や車線変更規制区間の長さ情報等である。この判定結果は、規制区間判定部20e及び報知制御部20fに伝達される。
【0029】
第三に、自車両状態判定部20bは、イグニッションスイッチ(図示略)のオンオフ信号を常に監視し、イグニッションスイッチがオン状態かオフ状態かを判定する。
他車両判定部20cは、自車両10の周囲に他車両が存在するか否かを判定し、他車両が存在する場合は他車両と自車両10との走行速度(車速)の違いを判定するものである。この他車両判定部20cは、前方レーダ11F,前方カメラ12F及び車車間通信部13により自車両10の前方情報を取得し、この前方情報から自車両10の走行する車線において自車両10の前方を走行する先行車両が存在するか否かを判定する。さらに、先行車両が存在すると判定されると、この先行車両と自車両10との車速(相対速度)を比較し、先行車両の車速が自車両10の車速よりも遅いか否を判定する。他車両判定部20cにより先行車両の車速が自車両10の車速よりも遅いと判定されると、その結果が自車両状態判定部20bに伝達される。一方、先行車両のほうが自車両10よりも速いと判定されると、その結果が報知制御部20fに伝達される。
【0030】
また、他車両判定部20cは、後方レーダ11R,後方カメラ12R及び車車間通信部13により自車両10の後方情報を取得し、この後方情報から自車両10の走行する車線において自車両10の後方を走行する後続車両が存在するか否かを判定する。さらに、後続車両が存在すると判定されると、この後続車両と自車両10との車速(相対速度)を比較し、後続車両の車速が自車両10の車速よりも速いか否を判定する。他車両判定部20cにより後続車両の車速が自車両10の車速よりも速いと判定されると、その結果が自車両状態判定部20bに伝達される。一方、後続車両のほうが自車両10よりも遅いと判定されると、その結果が報知制御部20fに伝達される。なお、他車両判定部20cは、ここでは先行車両に対する判定を優先して行う。
【0031】
ナビ動作判定部20dは、自車両10が片側2車線以上の道路を走行中にドライバによるウィンカー操作があったときに、ナビゲーション装置14の動作情報を取得して、ナビゲーション装置14によるルート案内中であるか否かを判定するものである。また、ナビ動作判定部20dは、ルート案内中であると判定されると、ウィンカースイッチ15から出力されたオン信号とナビゲーション装置14によるルート案内の内容とを比較して、ドライバがルート案内に従ってウィンカー操作をしたか否かを判定するものである。
【0032】
ナビ動作判定部20dにより、ルート案内中ではないと判定されると、その結果が自車両状態判定部20bに伝達される。また、ドライバのウィンカー操作がルート案内に従ったものではないと判定されると、その結果も自車両状態判定部20bに伝達される。また、ナビ動作判定部20dによりドライバのウィンカー操作がルート案内に従ったものであると判定されると、その結果は報知制御部20fに伝達される。
【0033】
規制区間判定部20eは、ナビゲーション装置14で検出された自車両10の位置情報と、自車両状態判定部20bで読み出された車線変更規制区間の情報とに基づき、自車両10の走行地点の前方所定距離内に、車線変更規制区間の起点又は終点が存在するか否かを判定するものである。この規制区間判定部20eは、自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内であると判定されたら、自車両10の走行地点の前方所定距離内に車線変更規制区間の終点が存在するか否かを判定する。また、自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内ではない(車線変更規制区間外である)と判定されたら、自車両10の走行地点の前方所定距離内に車線変更規制区間の起点が存在するか否かを判定する。
【0034】
なお、規制区間判定部20eの判定で用いられる前方所定距離は、車速センサ16により検出される自車両10の車速に応じて設定される。ここでは、車速が速いほど前方所定距離が大きくなるように設定されたマップが予めECU20に記憶されており、このマップを用いて規制区間判定部20eによる判定時の車速に応じて前方所定距離が設定される。規制区間判定部20eによる判定結果は、報知制御部20fに伝達される。
【0035】
報知制御部20fは、上記の判定部20a〜20eの判定結果に応じて、モニター17及びスピーカー18によるドライバに対する報知を制御する。この報知制御部20fは、ここでは、以下の(1)〜(4)の制御を実施する。
【0036】
(1)自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内であると判定され、規制区間判定部20eにより前方所定距離内に規制区間の終点があると判定されたら、モニター17に規制区間の終点までの距離を画面表示して、ドライバに車線変更規制区間が終了するまでの距離を報知する。このとき、例えば「車線変更規制区間の終了まであとD(例えば、700m)」等と画面表示し、その距離を連続的に短くする。また、このとき、スピーカー18による音声報知は所定時間のみ実施する。
【0037】
報知制御部20fは、例えば、モニター17による報知は、規制区間の終点までの距離を報知する必要性がなくなったら終了し、スピーカー18による報知は、規制区間判定部20eによる判定後、所定のタイミング(例えば、規制区間の終点まで所定距離Dに接近した時点)で一度だけ「車線変更規制区間の終了まであとD(例えば、700m)」等と報知して、継続的な報知を行わないようにしてもよく、所定距離接近する毎に(例えば、100m単位で)報知してもよい。なお、モニター17による報知の必要性については後述のフローチャートの説明とともに説明する。
【0038】
(2)自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間外であると判定され、規制区間判定部20eにより前方所定距離内に規制区間の起点があると判定されたら、モニター17に規制区間の起点までの距離を画面表示して、ドライバに車線変更規制区間に進入するまでの距離を報知する。このとき、例えば「車線変更規制区間の起点まであとD(例えば、700m)」等と画面表示し、その距離を連続的に短くする。また、このとき、スピーカー18による音声報知は所定時間のみ実施する。
【0039】
報知制御部20fは、例えば、モニター17による報知は、規制区間の起点までの距離を報知する必要性がなくなったら終了し、スピーカー18による報知は、規制区間判定部20eによる判定後、所定のタイミング(例えば、規制区間の終点まで所定距離Dに接近した時点)で一度だけ「車線変更規制区間の起点まであとD(例えば、700m)」等と報知して、継続的な報知を行わないようにしてもよく、所定距離接近する毎に(例えば、100m単位で)報知してもよい。なお、モニター17による報知の必要性については後述のフローチャートの説明とともに説明する。
【0040】
(3)ナビ動作判定部20dによりルート案内中ではない或いはドライバのウィンカー操作がルート案内に従ったものではないと判定され、自車両状態判定部20bにより自車両10の走行地点が車線変更規制区間内であると判定されたら、モニター17に、例えば「規制区間内です。車線変更できません。」等の内容を画面表示して、ドライバに規制区間内であることを報知する。また、このとき、スピーカー18により同様の内容を音声により報知する。モニター17による報知は、自車両状態判定部20bによりウィンカースイッチ15からオフ信号が出力された(オン信号が出力されなくなった)と判定されたら終了する。また、スピーカー18による報知は一度だけ行い、継続的に実施しない。
【0041】
(4)道路判定部20aにより自車両10が片側2車線未満の車線を走行していると判定され、自車両状態判定部20bによりウィンカースイッチ15からオン信号が出力されたと判定されたら、モニター17に、例えば「対向車に注意してください。」等の内容を画面表示して、ドライバに対向車の存在に注意するよう報知する。また、このとき、スピーカー18により同様の内容を音声により報知する。モニター17による報知は、自車両状態判定部20bによりウィンカースイッチ15からオフ信号が出力されたと判定されたら終了する。また、スピーカー18による報知は一度だけ行い、継続的に実施しない。
【0042】
[3.フローチャート]
次に、図3〜図6を用いてECU20で実行される支援制御の手順の例を説明する。図4〜図6は、図3に示すメインフローチャートのサブフローチャートである。これらのフローチャートは、所定の周期T(例えば、数[ms]周期)で動作する。また、下記の各ステップは、コンピュータのハードウェアに割り当てられた各機能(手段)が、ソフトウェア(コンピュータプログラム)によって動作することによって実施される。
【0043】
本支援制御装置は、ドライバによるイグニッションスイッチ(図示略)のオン操作が行われたら、以下の制御フローをスタートする。なお、フローチャート中のフラグFは、報知制御部20fによって実施されている報知制御のモードを示し、上記した(1)〜(4)に対応する。すなわち、フラグF=1は車線変更規制区間の終点までの距離を報知するモード、フラグF=2は車線変更規制区間の起点までの距離を報知するモード、フラグF=3は車線変更規制区間であることを報知するモード、フラグF=4は対向車に注意するよう報知するモードをそれぞれ示し、フラグF=0は報知停止モードを示す。なお、制御フローのスタート時は、フラグF=0に設定されている。
【0044】
図3に示すように、ステップS10では、ナビゲーション装置14により、自車両10の現在位置(走行地点)の情報及び自車両10が走行中の道路情報(レーン数の情報)を取得する。また、ウィンカースイッチ15によりウィンカー情報(オンオフ信号)を取得する。次に、ステップS20において、ステップS10で取得した道路情報から、自車両10が走行している道路が片側2車線以上の道路か否かが判定される。この判定は、道路判定部20aによって判定される。片側2車線以上の道路であれば、YESルートからステップS30へ進み、片側2車線未満の道路であると判定された場合は、NOルートからステップS70へ進む。
【0045】
ステップS30では、ウィンカースイッチ15によりオン信号が出力されているか否かが判定される。この判定は、自車両状態判定部20bによって判定される。ドライバによりウィンカー操作がされていればYESルートからステップS100へ進み、ウィンカー操作がされていなければNOルートからステップS31へ進む。ステップS100では、図4に示すサブフローAが実施される。すなわち、このサブフローAは、自車両10が片側2車線以上の道路を走行中にドライバによりウィンカー操作がされた場合に実施される。
【0046】
図4に示すように、ステップA10では、ナビゲーション装置14からナビ動作情報を取得する。次に、ステップA20において、ステップA10で取得したナビ動作情報から、ナビゲーション装置14によるルート案内中であるか否かが判定される。ルート案内中の場合は、YESルートからステップA30へ進み、ナビゲーション装置14により右左折指示がされているか否かが判定される(ステップA30)。これらの判定は、ナビ動作判定部20dによって判定される。
【0047】
ステップA30において、右左折指示がされていると判定されると、ステップA31において、ウィンカー操作方向(右左折方向)とナビゲーション装置14による右左折指示方向とが同じであるか否かが判定される。この方向が異なる場合は、ウィンカー操作方向が間違っているとメッセージを表示又は音声出力する(ステップA32)。一方、ウィンカー操作方向と右左折指示方向とが同じ場合は、ドライバによるウィンカー操作は、ナビゲーション装置14による指示に従ったものであるため、YESルートからステップA33へ進み、フラグFがF=0であるか否かが判定される(ステップA33)。制御フローのスタート時は、フラグF=0に設定されているため、YESルートへ進みサブフローAを終了してメインフローチャートへリターンする。一方、ステップA20においてルート案内中でないと判定された場合、及び、ステップA30において右左折指示していないと判定された場合は、いずれもNOルートからステップA40へ進む。
【0048】
ステップA40では、自車両10の走行地点が車線変更規制区間内であるか否かが判定される。この判定は、自車両状態判定部20bによって判定される。走行地点が車線変更規制区間内の場合、YESルートからステップA80へ進み、ドライバに車線変更できないことを知らせるために、モニター17やスピーカー18により規制区間内であることを報知する(ステップA80)。そして、フラグFをF=3に設定して(ステップA90)、サブフローAを終了してメインフローチャートへリターンする。
【0049】
一方、ステップA40において、走行地点が車線変更規制区間内ではないと判定されると、NOルートからステップA50へ進み、走行地点の前方所定距離内に車線変更規制区間の起点があるか否かが判定される(ステップA50)。この判定は、規制区間判定部20eによって判定される。前方所定距離内に起点がある場合は、ドライバに対して車線変更できなくなるまでの距離を知らせるために、モニター17やスピーカー18により規制区間の起点までの距離を報知する(ステップA60)。
【0050】
これにより、ドライバは、車線変更後の車線側に目的地や分岐点がある場合は車線変更をしたまま走行を続けることができ、車線変更前の車線側に目的地や分岐点がある場合は車線変更を中止することができる。そして、ステップA70においてフラグFをF=2に設定して、サブフローAを終了してメインフローチャートへリターンする。また、ステップA50において、前方所定距離内に起点がない場合は、NOルートへ進み、サブフローAを終了してメインフローチャートへリターンする。
【0051】
図4に示すサブフローAが終了すると、図3に示すステップS80へ進み、イグニッションスイッチ(IG_SW)がオフ状態であるか否かが判定される(ステップS80)。この判定は自車両状態判定部20bによって判定される。イグニッションスイッチがオフの場合はYESルートへ進み制御フローを終了し、オフでない場合はNOルートへ進みリターンして、ステップS10において再び自車両位置情報,ウィンカー情報及び道路情報を取得する。そして、ステップS20において再び片側2車線以上の道路か否かが判定される。
【0052】
ステップS20において片側2車線以上の道路であると判定され、ステップS30においてウィンカー操作がされていない(オフ信号が出力された)と判定されると、ステップS31においてフラグFがF=0又はF=1であるか否かが判定される。このとき、例えば、サブフローAのステップA60又はステップA80において報知がされている状態では、フラグFがF=2又はF=3に設定されているため、ステップS31ではNOルートへ進み、ステップS32において報知を停止する。すなわち、ステップA60及びステップA80において開始された報知は、ウィンカースイッチ15からオフ信号が出力されたら終了する。
【0053】
これは、ステップA80において規制区間内であることを報知した場合は、ドライバは車線変更できないことを認識し、ウィンカーを元に戻す(すなわち、ウィンカースイッチ15によってオフ信号が出力される)と考えられるためである。また、ステップA60において規制区間の起点までの距離を報知した場合にドライバがウィンカーを元に戻した場合は、車線変更し終わったか、車線変更を中止したかのいずれかの場合であると考えられるためである。すなわち、規制区間の起点までの距離の報知は、ウィンカー操作がオフされるまで必要であると判断され、ウィンカー操作がオフされたら不要であると判断される。
【0054】
また、ステップS30においてウィンカースイッチ15によりオン信号が出力されていると判定されると、再びステップS100へ進み、図4のサブフローAが実施される。このとき、ステップA20,ステップA30及びステップA31において、ウィンカー操作がナビゲーション装置14のルート案内に従ったものであると判定され、ウィンカー操作方向と右左折指示方向とが同じであると判定されると(すなわち、ステップA30からYESルートへ進み、ステップA31からYESルートへ進むと)、ステップA33においてフラグFがF=0であるか否かが判定される。前回の制御周期において、フラグFがF=2又はF=3に設定されている場合は、ステップA33からNOルートへ進み、ステップA34においてそのとき実施している報知を停止する。
【0055】
すなわち、ドライバによるウィンカー操作がナビゲーション装置14による案内に従ったものである場合は、規制区間の起点までの距離の報知は不要であると判断されて報知を停止する。ステップS32又はステップA34において報知が停止されると、フラグFがF=0にリセットされる(ステップS33又はステップA35)。ステップS33においてフラグF=0に設定されたら、ステップS40へ進む。また、ステップA35においてフラグがリセットされたら、サブフローAを終了してメインフローチャートへリターンする。
【0056】
一方、ステップS31においてフラグFがF=0又はF=1であると判定されると、YESルートからステップS40へ進む。ステップS40では、レーダ11,カメラ12及び車車間通信部13により他車両の情報を取得する。次に、ステップS50において、ステップS40で取得した他車両の情報から、自車両10に先行する先行車両が存在するか否かが判定される。この判定は、他車両判定部20cによって判定される。先行車両が存在すれば、YESルートからステップS200へ進み、先行車両が存在しない場合はNOルートからステップS51へ進む。ステップS200では、図5に示すサブフローBが実施される。すなわち、このサブフローBは、自車両10が片側2車線以上の道路を走行中であって、ドライバによるウィンカー操作がされておらず、自車両10の前方に先行車両が存在する場合に実施される。
【0057】
図5に示すように、ステップB10では、自車両10の車速と先行車両の車速とを比較し、先行車両が自車両10よりも遅いか否かが判定される。この判定も他車両判定部20cによって判定される。先行車両が自車両10よりも遅い場合は、YESルートからステップB20へ進み、自車両10の走行地点が車線変更規制区間内であるか否かが判定される(ステップB20)。走行地点が車線変更規制区間内の場合、ステップB60において走行地点の前方所定距離内に車線変更規制区間の終点があるか否かが判定される。前方所定距離内に終点がある場合は、ドライバに対して車線変更可能となる距離を知らせるために、モニター17やスピーカー18により規制区間の終点までの距離を報知する(ステップB70)。そして、フラグFをF=1に設定して(ステップB80)、サブフローBを終了してメインフローチャートへリターンする。
【0058】
一方、ステップB20において、走行地点が車線変更規制区間内ではないと判定されると、ステップB30において走行地点の前方所定距離内に車線変更規制区間の起点があるか否かが判定される。前方所定距離内に起点がある場合は、モニター17やスピーカー18により規制区間の起点までの距離を報知し(ステップB40)、フラグFをF=2に設定して(ステップB50)、サブフローBを終了してメインフローチャートへリターンする。なお、ステップB60において前方所定距離内に終点がない場合、及び、ステップB30において前方所定距離内に起点がない場合は、それぞれNOルートへ進み、サブフローBを終了してメインフローチャートへリターンする。
【0059】
また、ステップB10において、先行車両が自車両10よりも速いと判定された場合は、NOルートからステップB11へ進み、フラグFがF=0であるか否かが判定される(ステップB11)。フラグFがF=0の場合は、YESルートへ進みサブフローBを終了してメインフローチャートへリターンする。一方、モニター17又はスピーカー18により、規制区間の起点までの距離や規制区間の終点までの距離を報知している場合は、NOルートからステップB12へ進み、その報知を停止して(ステップB12)、フラグFをF=0にリセットし(ステップB13)、サブフローBを終了してメインフローチャートへリターンする。すなわち、先行車両の車速が自車両10よりも速い場合は、規制区間の起点又は終点までの距離を報知する必要がないと判断され、サブフローBを終了してメインフローチャートへリターンする。
【0060】
図5に示すサブフローBが終了すると、図3に示すステップS80へ進み、イグニッションスイッチ(IG_SW)がオフ状態であるか否かが判定され(ステップS80)、オフの場合は制御を終了し、オフでない場合はリターンしてステップS10からの制御が再び実施される。ステップS10において自車両位置情報,ウィンカー情報及び道路情報を取得し、ステップS20において片側2車線以上の道路か否かが判定される。
【0061】
ステップS20において片側2車線以上の道路であると判定され、ステップS30においてウィンカー操作がされていないと判定されると、ステップS31においてフラグFがF=0又はF=1であるか否かが判定される。このとき、例えば、サブフローBのステップB40の報知がされている状態ではフラグFがF=2に設定されているため、ステップS32において報知を停止する。
【0062】
つまり、自車両10の前方に、自車両10よりも遅い先行車両が存在する場合であって、自車両10の走行地点の前方所定距離内に車線変更規制区間の起点がある場合は、ドライバに対してその起点までの距離を報知することにより車線変更を促す、若しくは、車線変更せずにそのまま追従走行するよう促すことができる。ドライバが車線変更する場合はウィンカー操作するため、ステップS30においてYESルートからステップS100へ進む。この場合は、図4に示すサブフローAの制御が上記したように実施される。また、ドライバが車線変更しない場合はウィンカー操作はされないため、ステップS32へ進み、起点までの距離の報知を停止し、支援制御の煩わしさを回避する。
【0063】
また、例えば、サブフローBのステップB70の報知がされている状態ではフラグFがF=1に設定されているため報知が停止されることなく、ステップS40において他車両情報を取得し、ステップS50において先行車両の有無が判定される。先行車両が存在する場合は、ステップS200へ進み、図5に示す上記したサブフローBの制御が再び実施される。一方、先行車両が存在しなくなった場合は、ステップS51へ進み、フラグFがF=0であるか否かが判定される(ステップS51)。
【0064】
このとき、規制区間の終点までの距離を報知している場合は、フラグFがF=1に設定されているため、ステップS52において報知を停止し、フラグFがF=0にリセットされる(ステップS53)。すなわち、ドライバによるウィンカー操作がされておらず、自車両10の前方に先行車両も存在しない場合は、規制区間の起点までの距離を報知する必要性がないため、何ら報知を行わない。これにより、支援制御の煩わしさを回避する。
【0065】
ステップS51においてフラグFがF=0であると判定された場合、又はステップS53においてフラグFがF=0にリセットされた場合は、ステップS60において、ステップS40で取得した他車両の情報から、自車両10に追従する後続車両が存在するか否かが判定される。この判定は、他車両判定部20cによって判定される。後続車両が存在すれば、YESルートからステップS300へ進み、後続車両が存在しない場合はNOルートからステップS80へ進む。ステップS300では、図6に示すサブフローCが実施される。すなわち、このサブフローCは、自車両10が片側2車線以上の道路を走行中であって、ドライバによるウィンカー操作がされておらず、自車両10の前方に先行車両は存在しないが後方に後続車両が存在する場合に実施される。
【0066】
図6に示すように、ステップC10では、自車両10の車速と後続車両の車速とを比較し、後続車両が自車両10よりも速いか否かが判定される。この判定も他車両判定部20cによって判定される。後続車両が自車両10よりも速い場合は、YESルートからステップC20へ進み、自車両10の走行地点が車線変更規制区間内であるか否かが判定される(ステップC20)。走行地点が車線変更規制区間内の場合、ステップC60において走行地点の前方所定距離内に車線変更規制区間の終点があるか否かが判定される。前方所定距離内に終点がある場合は、ドライバに対して車線変更可能となる距離を知らせるために、モニター17やスピーカー18により規制区間の終点までの距離を報知する(ステップC70)。そして、フラグFをF=1に設定して(ステップC80)、サブフローCを終了してメインフローチャートへリターンする。
【0067】
一方、ステップC20において、走行地点が車線変更規制区間内ではないと判定されると、ステップC30において走行地点の前方所定距離内に車線変更規制区間の起点があるか否かが判定される。前方所定距離内に起点がある場合は、モニター17やスピーカー18により規制区間の起点までの距離を報知し(ステップC40)、フラグFをF=2に設定して(ステップC50)、サブフローCを終了してメインフローチャートへリターンする。なお、ステップC60において前方所定距離内に終点がない場合、及び、ステップC30において前方所定距離内に起点がない場合は、それぞれNOルートへ進み、サブフローCを終了してメインフローチャートへリターンする。
【0068】
また、ステップC10において、後続車両が自車両10よりも遅いと判定された場合は、NOルートからステップC11へ進み、フラグFがF=0であるか否かが判定される(ステップC11)。フラグFがF=0の場合は、YESルートへ進みサブフローCを終了してメインフローチャートへリターンする。一方、モニター17又はスピーカー18により、規制区間の起点までの距離や規制区間の終点までの距離を報知している場合は、NOルートからステップC12へ進み、その報知を停止して(ステップC12)、フラグFをF=0にリセットし(ステップC13)、サブフローCを終了してメインフローチャートへリターンする。すなわち、後続車両の車速が自車両10よりも速い場合は、規制区間の起点又は終点までの報知を終了する。
【0069】
図6に示すサブフローCが終了すると、図3に示すステップS80へ進み、イグニッションスイッチ(IG_SW)がオフ状態であるか否かが判定され(ステップS80)、オフの場合は制御を終了し、オフでない場合はリターンする。一方、ステップS60において後続車両が存在しないと判定されたら、ステップS80の判定へ進み、制御フローを終了するかリターンする。
【0070】
以上が自車両10の走行地点が片側2車線以上の道路の場合であるが、ステップS20において、走行地点が片側2車線未満の道路であると判定されると、NOルートからステップS70へ進み、ステップS70においてウィンカースイッチ15によりオン信号が出力されたか否かが判定される。オン信号が出力された場合は、ステップS74においてモニター17やスピーカー18により対向車に注意するよう報知し、ステップS75においてフラグFがF=4に設定され、ステップS80へ進む。
【0071】
一方、ステップS70においてオン信号が出力されていない場合(オフ信号が出力された場合)は、ステップS71においてフラグFがF=0であるか否かが判定される。フラグFがF=0の場合は、YESルートからステップS80へ進む。一方、例えば前回の制御周期においてステップS74の報知を行っている場合は、NOルートからステップS72へ進み、その報知を停止して(ステップS72)、フラグFをF=0にリセットし(ステップS73)、ステップS80へ進む。
この支援制御は、ステップS80においてイグニッションスイッチがオフになったと判定されるまで繰り返し実施される。
【0072】
[4.効果]
したがって、本実施形態に係る運転支援装置によれば、自車両10の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在すると判定された場合は、この起点又は終点の情報を報知するため、自車両10を運転するドライバが事前に車線変更規制区間の起点又は終点の存在を認識することができる。したがって、ドライバは、車線変更ができなくなるタイミング又は車線変更ができるようになるタイミングを予め把握することができ、ドライバに対して車線変更を考慮した適切な走行ができるように運転を支援することができる。
【0073】
すなわち、例えば、自車両10が車線変更規制区間ではない道路を走行している場合、ドライバに対して車線変更規制区間の起点の情報を報知することにより、車線変更規制区間が存在することを知らせることができる。これにより、走行中の車線とは別の車線が目的地に行くために適しているのであれば早めに車線変更するように促すことができ、車線変更することなく走行中の車線が目的地に行くために適しているのであれば不必要な車線変更を中止するよう促すことができる。そのため、無駄な車線変更を回避でき、運転操作が煩雑になることを防ぐことができる。また、自車両10が車線変更規制区間内を走行している場合、ドライバに対して車線変更規制区間の終点の情報を報知することにより、車線変更が可能となる区間が前方所定距離内にあることを知らせることができる。そのため、ドライバが早く車線変更したいと考えている場合は、所定距離走行したら車線変更できると認識できるため、車線変更が可能の地点までストレスを感じることなく安心して走行することができる。
【0074】
また、ここでは、走行地点の前方所定距離が、自車両10の車速が速いほど長く、車速が遅いほど短く設定される(すなわち、前方所定距離が車速に応じて設定される)ため、ドライバに対する起点又は終点の報知を適切なタイミングで行うことができる。これにより、ドライバに対する適切な運転支援をすることができる。
また、報知手段として、車線変更規制区間の起点又は終点の情報を画面表示して報知するモニター17と、起点又は終点の情報を音声により報知するスピーカー18とを備えているため、ドライバが視覚及び聴覚によって確実に報知内容を知ることができる。また、モニター17による報知は、報知する必要性がなくなったと判断されるまで継続して実施されるが、スピーカー18による報知は、所定時間のみ行われ、継続して実施されないため、報知の煩わしさを回避し、過剰な支援制御となることを防ぐことができる。
【0075】
また、モニター17及びスピーカー18によって、車線変更規制区間の起点又は終点までの距離を報知するため、ドライバがあとどのくらい走行すれば起点又は終点に到達するか直感的に知ることができる。これにより、より適切な運転を支援することができる。
【0076】
[5.変形例]
以上、本発明の実施形態を説明したが、本発明は上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形することが可能である。
【0077】
上記実施形態では、自車両10の走行地点の前方所定距離を、自車両10の車速に応じて設定したが、前方所定距離の設定方法はこれに限られない。例えば、自車両10の車速に応じて設定することに加え、レーダ11やカメラ12、車車間通信部13により先行車両を検出した場合は、先行車両がいない場合に比べて前方所定距離を長く設定してもよい。先行車両がいる場合は、より速く車線変更規制区間の起点又は終点の情報を報知することにより、ドライバに対して先行車両と車線変更とを考慮した適切な走行を支援することができる。
【0078】
また、自車両10の車速に応じて設定することに代えて、先行車両の有無により前方所定距離を設定してもよい。また、車速や先行車両の有無に関わらず、前方所定距離を予め一定の値に設定しておいてもよい。この場合、前方所定距離を変更する必要がないため、制御を簡素にすることができる。
また、上記実施形態では、前方所定距離を車速に応じて設定する際にマップを用いているが、これに限られず、例えば、車速に応じて設定する際に予め設定された数式等を用いるようにしてもよい。
【0079】
また、上記実施形態では、片側2車線未満の道路を走行している場合は、図3のステップS20の判定においてNOとなり、ステップS70においてウィンカー操作がされていると判定されると対向車に注意するようにドライバに報知する構成となっている。しかし、本運転支援制御装置は、片側2車線以上の道路に限られず、例えば片側1車線の道路や山道等を走行している場合にも適用可能である。
【0080】
例えば、片側1車線の道路を走行中、自車両よりも速度が遅い先行車両がいる場合、自車両の走行地点が追い越し禁止区間内であると判定されたら、追い越し禁止区間の終点をドライバに報知することにより、ドライバがあとどの程度走行すれば先行車両を追い越すことができるか事前に把握することができるため、ストレスを抑制することができる。
また、例えば、片側1車線の道路や山道を走行中、自車両よりも速度が速い後続車両がいる場合、自車両の走行地点が追い越し禁止区間内であると判定されたら、追い越し禁止区間の終点をドライバに報知することにより、終点までの距離が長い場合は路肩等の避難所へ待避して後続車両を先に行かせることができる。また、終点までの距離が短い場合はそのまま走行を続け、追い越し禁止区間が終了したら側方へ避けて後続車両に追い越してもらうことができる。
【0081】
また、上記実施形態では、自車両10の前方及び後方の情報を検出する手段として、レーダ11,カメラ12及び車車間通信部13を用いたが、例えば、ステレオカメラのみを設置して、レーダ及び車車間通信部は設けなくてもよい。また、2つのCCDカメラを自車両10の前方及び後方にそれぞれ配置してステレオカメラと同様の情報を得られるようにして、レーダ及び車車間通信部を省略してもよい。この場合、その設置場所は中央ではなく、車幅方向中央を中心線として線対称に設けられることが好ましい。ステレオカメラや2つのCCDカメラを用いた場合であっても、前後方向の距離を検出することができる。なお、1つのCCDカメラでも遠近距離を検出することができるものであれば、CCDカメラは1つでもよい。また、カメラ12及び車車間通信部13を設けず、レーダ11のみを設けてもよい。先行車両と後続車両の有無情報及び速度情報はレーダ11を走査することにより取得可能である。
【0082】
また、上記実施形態では、他車両判定部20cが先行車両に対する判定を優先しており、図3のステップS40で取得した他車両情報に基づいて、まず先行車両の有無を判定し、先行車両の速度に応じて報知するか否かの判定を実施しているが、他車両判定部20cが後続車両に対する判定を優先して行ってもよい。
また、上記実施形態では、先行車両及び後続車両がいない場合は、ドライバによるウィンカー操作をトリガとして、走行地点が規制区間内か否かの判定を行い、過剰な支援にならないように構成されている。この構成に加え、規制区間の起点又は終点の情報をドライバが自由に得られるように、規制区間確認スイッチを、例えば運転席の近傍に設けてもいい。
【0083】
この規制区間確認スイッチは、ドライバによるオン操作がされると、自車両状態判定部20bにより自車両10の走行地点が規制区間内であるか否かが判定され、規制区間内であれば、規制区間判定部20eにより走行地点の前方所定距離内に規制区間の終点があるか否かが判定される。また、規制区間外であれば、規制区間判定部20eにより走行地点の前方所定距離内に規制区間の起点があるか否かが判定される。これらの判定の結果、起点又は終点が存在すれば、その起点又は終点までの距離を報知する。このような構成により、ドライバに対して任意のタイミングで車線変更ができるタイミングとできなくなるタイミングを知らせることができる。
【0084】
また、上記の実施形態では、モニター17及びスピーカー18により規制区間の起点又は終点までの距離を報知したが、距離ではなく起点又は終点に到達するまでの時間を報知するように構成してもよい。起点又は終点に到達するまでの距離よりも、その距離を車速センサで検出した車速で除して時間に換算することにより、計算過程が増えるものの、ドライバがより直感的にどの程度で起点又は終点に到達するのかを理解することができる。
【0085】
また、上記実施形態では、報知手段としてモニター17及びスピーカー18の両方を設けているが、何れか一方でもよい。また、モニター17はナビゲーション装置14の画面と併用してもよく、スピーカー18の代わりにナビゲーション装置14に内蔵される音響装置を利用してもよい。
なお、上記実施形態で説明した自車両10は、自動車やトラックやバス等、特に限定されない。
【符号の説明】
【0086】
10 自車両
11 レーダ(他車両検出手段)
12 カメラ(他車両検出手段)
13 車車間通信部(他車両検出手段)
14 ナビゲーション装置(道路情報取得手段,現在地検出手段)
15 ウィンカースイッチ
16 車速センサ
17 モニター(表示手段,報知手段)
18 スピーカー(音響手段,報知手段)
20 ECU(電子制御装置)
20a 道路判定部
20b 自車両状態判定部
20c 他車両判定部
20d ナビ動作判定部
20e 規制区間判定部(判定手段)
20f 報知制御部
【特許請求の範囲】
【請求項1】
自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段と、
前記道路情報取得手段により取得された前記車線変更規制区間の情報に基づいて、前記自車両の走行地点の前方所定距離内に前記車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段と、
前記判定手段により前記起点又は終点が存在すると判定されたら前記起点又は終点の情報を報知する報知手段とを備える
ことを特徴とする、運転支援装置。
【請求項2】
前記前方所定距離は、前記自車両の車速に応じて設定される
ことを特徴とする、請求項1記載の運転支援装置。
【請求項3】
前記道路において前記自車両の前方を走行する先行車両を検出する他車両検出手段を備え、
前記前方所定距離が、前記他車両検出手段により前記先行車両が検出された場合は前記先行車両が検出されない場合に比べて長く設定される
ことを特徴とする、請求項1又は2記載の運転支援装置。
【請求項4】
前記報知手段は、前記起点又は終点の情報を表示して報知する表示手段と、前記起点又は終点の情報を所定時間のみ音声により報知する音響手段とを有する
ことを特徴とする、請求項1〜3のいずれか1項に記載の運転支援装置。
【請求項5】
前記報知手段は、前記起点又は終点までの距離を報知する
ことを特徴とする、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項6】
前記報知手段は、前記起点又は終点に到達するまでの時間を報知する
ことを特徴とする、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項1】
自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段と、
前記道路情報取得手段により取得された前記車線変更規制区間の情報に基づいて、前記自車両の走行地点の前方所定距離内に前記車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段と、
前記判定手段により前記起点又は終点が存在すると判定されたら前記起点又は終点の情報を報知する報知手段とを備える
ことを特徴とする、運転支援装置。
【請求項2】
前記前方所定距離は、前記自車両の車速に応じて設定される
ことを特徴とする、請求項1記載の運転支援装置。
【請求項3】
前記道路において前記自車両の前方を走行する先行車両を検出する他車両検出手段を備え、
前記前方所定距離が、前記他車両検出手段により前記先行車両が検出された場合は前記先行車両が検出されない場合に比べて長く設定される
ことを特徴とする、請求項1又は2記載の運転支援装置。
【請求項4】
前記報知手段は、前記起点又は終点の情報を表示して報知する表示手段と、前記起点又は終点の情報を所定時間のみ音声により報知する音響手段とを有する
ことを特徴とする、請求項1〜3のいずれか1項に記載の運転支援装置。
【請求項5】
前記報知手段は、前記起点又は終点までの距離を報知する
ことを特徴とする、請求項1〜4のいずれか1項に記載の運転支援装置。
【請求項6】
前記報知手段は、前記起点又は終点に到達するまでの時間を報知する
ことを特徴とする、請求項1〜4のいずれか1項に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−19803(P2013−19803A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−154077(P2011−154077)
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]