
運転支援装置
【課題】運転者個々に適した運転支援を行う運転支援装置を提供することを課題とする。
【解決手段】駆動源としてモータを有する車両に対して運転支援する運転支援装置1であって、任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段20,21と、運転支援対象の車両が走行する任意の走行ルートに対して収集されている電力量の変化情報に基づいて複数の運転特性に分類し、その分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定する運転特性推定手段23を備え、その推定した運転特性に基づいて運転支援対象の車両を運転支援する(例えば、走行ルート上で到達可能地点情報の情供、走行ルート上での省エネルギ走行情報を提供)。
【解決手段】駆動源としてモータを有する車両に対して運転支援する運転支援装置1であって、任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段20,21と、運転支援対象の車両が走行する任意の走行ルートに対して収集されている電力量の変化情報に基づいて複数の運転特性に分類し、その分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定する運転特性推定手段23を備え、その推定した運転特性に基づいて運転支援対象の車両を運転支援する(例えば、走行ルート上で到達可能地点情報の情供、走行ルート上での省エネルギ走行情報を提供)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動源としてモータを有する車両に対して運転支援する運転支援装置に関する。
【背景技術】
【0002】
電気自動車は、バッテリからモータに電力を供給し、モータによる駆動力で走行する。したがって、電気自動車の場合、バッテリの電力量が不足する前に充電しなければ、走行不能となる。そこで、運転支援装置には、電力消費量を少なくするための情報の提供や残電力量での走行可能距離情報の提供等を行うものがある。特許文献1には、各リンクにおける電力回生量のデータを含むプローブ情報を受信し、そのプローブ情報に基づいて各リンクの電力回生量に関するコスト変数値を求めて地図データ記憶部に記憶しておき、現在位置から目的地までの候補経路毎に候補経路を構成する各リンクに付与されたコスト変数値に基づいて経路コストを計算し、複数の候補経路の中から経路コストが最小となる経路を提供することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−101745号公報
【特許文献2】特開2011−59921号公報
【特許文献3】特開2006−300780号公報
【特許文献4】特開2009−257966号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の発明では、電気回生量という車両側の特性を考慮して燃費の良い経路を提供している。しかし、電気自動車における電力消費は、アクセル開度等の運転者個々の運転特性による影響を大きく受ける。したがって、提供される燃費の良い経路は、運転者によっては燃費の良い経路となっていない場合がある。
【0005】
そこで、本発明は、運転者個々に適した運転支援を行う運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、運転支援対象の車両が走行する任意の走行ルートについて収集手段で収集した電力量の変化情報に基づいて複数の運転特性に分類し、該分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定する運転特性推定手段とを備え、運転特性推定手段で推定した運転特性に基づいて運転支援対象の車両を運転支援することを特徴とする。
【0007】
この運転支援装置では、多数の車両から各走行ルートについての電力量の変化情報を収集する。この電力量の変化情報は、バッテリの電力量自体の変化情報でもよいし、車両における電力消費量の変化情報でもよい。ある走行ルートを様々な車両(様々な運転者)が走行した場合、運転者の運転操作特性等によって様々なバッテリの電力量の変化(ひいては、電力消費量の変化)を示すが、その中には電力消費量の変化の仕方が類似しているものが存在する。そこで、運転支援装置では、運転支援対象の車両が走行する任意の走行ルートについて、収集されている電力量の変化情報に基づいて、電力消費量の変化が類似している同士で複数の運転特性に分類する。そして、運転支援装置では、その任意の走行ルートに対して分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定する。運転支援対象の車両(運転者)は、その任意の走行ルートを走行中、推定された運転特性の電力消費量の変化と同様の電力消費で走行すると予測できる。そこで、運転支援装置では、その任意の走行ルートを走行中に、推定した運転特性に基づいて運転支援対象の車両を運転支援する。このように、運転支援装置では、任意の走行ルートに対して様々な車両から収集した電力量の変化情報に基づいて分類した運転特性の中から運転支援対象の車両(運転者)の運転特性を推定することにより、運転支援対象の車両(運転者)個々の運転特性を考慮して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。
【0008】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転特性に基づいて運転支援対象の車両における現在の電力量で任意の走行ルート上での到達可能地点を予測し、該到達可能地点を運転支援対象の車両で提供する。このように、運転支援装置では、推定された運転特性から任意の走行ルート全体における電力消費量の変化を予測できるので、その電力消費量の変化の予測値に基づいて現在の電力量によって走行ルート上でどこまで走行できるかを高精度に判断でき、運転者に走行ルート上での到達可能地点情報を提供できる。これによって、運転者は、走行ルート上での到達可能地点(どこまで走行できるか)を知ることができる。
【0009】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転特性に基づいて任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を運転支援対象の車両で提供する。このように、運転支援装置では、推定された運転特性から任意の走行ルートにおける電力消費量の変化を予測できるので、その電力消費量の変化の予測値に基づいてそれよりもエネルギ消費量(電力消費量)を抑える運転をするための情報を得ることができ、運転者に省エネルギ運転情報を提供できる。運転者は、その省エネルギ運転情報に従って運転することにより、車両のエネルギ消費量を抑えることができる。その結果、より遠くまで行くことができ、充電回数や充電時間を減らすことができる。
【0010】
本発明に係る運転支援装置は、駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、運転支援対象の車両の電力量の変化情報に基づいて運転者の運転特性を推定する運転特性推定手段とを備え、運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて運転支援対象の車両を運転支援することを特徴とする。
【0011】
この運転支援装置では、多数の車両から各走行ルートについての電力量の変化情報を収集する。ある走行ルートを車両(運転者)が走行した場合、その運転者の運転操作特性によってその運転者特有のバッテリの電力量の変化(ひいては、電力消費量の変化)を示す。そこで、運転支援装置では、運転支援対象の車両の電力量の変化情報に基づいて運転者の運転特性を推定する。そして、運転支援装置では、運転支援対象の車両が任意の走行ルートを走行する場合、推定した運転支援対象の車両の運転者の運転特性に任意の走行ルートについて収集された電力量の変化情報を用いて運転特性を修正し、その修正した運転特性に基づいて運転支援対象の車両を運転支援する。このように、運転支援装置では、運転支援対象の車両の電力量の変化情報から推定した運転者の運転特性に任意の走行ルートに対して様々な車両から収集された電力量の変化情報を用いて運転支援対象の車両(運転者)の運転特性を修正することにより、運転支援対象の車両(運転者)個々の運転特性を考慮しつつ様々な車両(運転者)の運転特性を加味して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。
【0012】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて運転支援対象の車両における現在の電力量で任意の走行ルート上での到達可能地点を予測し、該到達可能地点を運転支援対象の車両で提供する。このように、運転支援装置では、運転支援対象の車両の電力量の変化情報から推定した運転者の運転特性に任意の走行ルートに対して様々な車両から収集された電力量の変化情報を加味した運転支援対象の車両(運転者)の運転特性に基づいて現在の電力量によって任意の走行ルート上でどこまで走行できるかを高精度に判断でき、運転者に走行ルート上での到達可能地点情報を提供できる。これによって、運転者は、走行ルート上での到達可能地点(どこまで走行できるか)を知ることができる。
【0013】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を運転支援対象の車両で提供する。このように、運転支援装置では、運転支援対象の車両の電力量の変化情報から推定した運転者の運転特性に任意の走行ルートに対して様々な車両から収集された電力量の変化情報を加味した運転支援対象の車両(運転者)の運転特性に基づいて任意の走行ルート上でエネルギ消費量(電力消費量)を抑える運転をするための情報を得ることができ、運転者に省エネルギ運転情報を提供できる。運転者は、その省エネルギ運転情報に従って運転することにより、車両のエネルギ消費量を抑えることができる。その結果、より遠くまで行くことができ、充電回数や充電時間を減らすことができる。
【発明の効果】
【0014】
本発明によれば、任意の走行ルートに対して様々な車両から収集した電力量の変化情報に基づいて分類した運転特性の中から運転支援対象の車両(運転者)の運転特性を推定することにより、運転支援対象の車両(運転者)個々の運転特性を考慮して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。
【図面の簡単な説明】
【0015】
【図1】第1の実施の形態に係る運転支援システムの構成図である。
【図2】第2の実施の形態に係る運転支援システムの構成図である。
【発明を実施するための形態】
【0016】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0017】
本実施の形態では、本発明に係る運転支援装置を、車両(特に、ナビゲーション装置)とセンタによって構成される運転支援システムに適用する。本実施の形態に係る運転支援システムでは、車両とセンタとが無線で通信可能である。本実施の形態に係る車両は、電気自動車であり、外部から充電可能なバッテリと駆動源としてのモータを備えており、バッテリからモータに電力を供給し、モータによる駆動力で走行する。また、本実施の形態に係る車両は、プローブカーとして機能し、センタにプローブ情報を提供する。本実施の形態に係るセンタは、各車両からプローブ情報を収集し、プローブ情報に基づいて各車両に各種サービス情報を提供する。特に、本実施の形態では、第1の実施の形態が現在の残電力量での走行可能範囲情報を提供する形態であり、第2の実施の形態が運転アドバイス情報を提供する形態である。
【0018】
図1を参照して、第1の実施の形態に係る運転支援システム1について説明する。図1は、第1の実施の形態に係る運転支援システムの構成図である。
【0019】
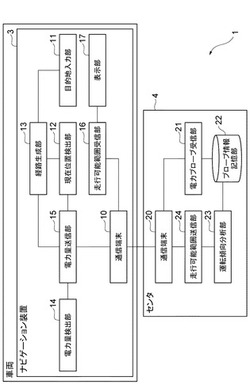
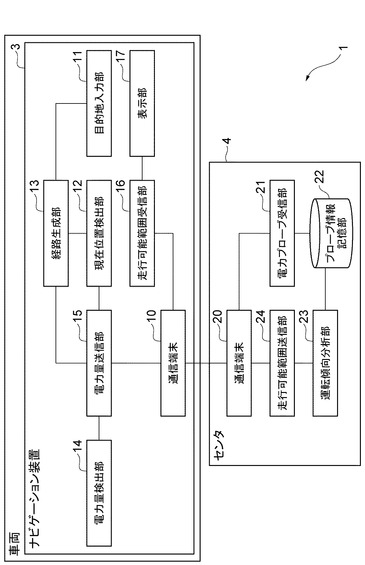
運転支援システム1は、センタ4とセンタ4との無線通信が可能な各車両のナビゲーション装置3によって構成され、センタ4と各車両間で情報を送受信する。特に、運転支援システム1では、各車両から少なくとも電力量の変化情報を含むプローブ情報をセンタ4で収集して蓄積し、センタ4でプローブ情報を用いて電力消費量の変化による運転傾向(運転特性)を学習し、運転支援対象の車両(運転者)の運転傾向を推定し、その運転傾向による電力消費量の変化に基づく走行可能範囲を運転者に提供する。
【0020】
ナビゲーション装置3は、現在位置検出機能、地図表示機能、目的地設定機能、経路探索機能、経路案内機能等の通常の機能の他にセンタ4にプローブ情報を送信するとともにセンタ4から送信されたサービス情報を運転者に提供する機能を有している。第1の実施の形態では、ナビゲーション装置3については、このセンタ4との間で行う機能について詳細に説明する。
【0021】
ナビゲーション装置3では、運転者によって目的地が入力され、その目的地までの経路(ルート)を生成した場合、ルート走行中にプローブ情報をセンタ4に送信する。また、ナビゲーション装置3では、センタ4からの走行可能範囲情報を受信すると、その走行可能範囲情報を表示する。そのために、ナビゲーション装置3は、通信端末10、目的地入力部11、現在位置検出部12、経路生成部13、電力量検出部14、電力量送信部15、走行可能範囲受信部16、表示部17を備えている。
【0022】
通信端末10は、センタ4との無線通信を行うための通信端末である。通信端末10で送信する情報としては、プローブ情報がある。プローブ情報には、車両の識別番号、目的地入力部11で入力された目的地、経路生成部13で生成された経路(ルート)の情報等が付加される。通信端末10で受信する情報としては、走行可能範囲情報等がある。
【0023】
目的地入力部11では、運転者による入力操作を受け付け、その入力操作に応じた目的地を設定する。現在位置検出部12では、一定時間毎に、車両の現在位置や進行方向を検出する。経路生成部13では、目的地入力部11で目的地が設定されると、現在位置検出部12で検出した現在位置から目的地までの経路を計算する。なお、この目的地入力部11、現在位置検出部12、経路生成部13による各機能は、従来のナビゲーション装置における各機能と同様の機能である。
【0024】
電力量検出部14は、バッテリの現在の電力量(残充電量)を検出するセンサ(特に、SOCセンサ)である。本実施の形態では、電力量としては、SOC[State Of Charge](バッテリの最大電力量に対する残電力量の割合(%))を用いる。電力量検出部14では、一定時間毎に、現在の電力量を検出すると、検出した電力量を電力量送信部15に出力する。
【0025】
電力量送信部15では、経路生成部13で生成されたルートを走行中に、現在位置検出部12で一定時間毎に検出される現在位置に基づいて、走行中のリンクの開始から終了までの区間を判定する。そして、電力量送信部15では、電力量検出部14で一定時間毎に検出される電力量を用いて、リンク単位の電力量の変化情報を含むプローブ情報を生成し、そのプローブ情報を通信端末10を介してセンタ4に送信する。このプローブ情報には、リンク単位の電力量の変化情報の他にも、リンク旅行時間情報、アクセル開度情報、速度情報、エアコンやライト等の電力を消費する各種装置のON/OFF情報、ルート上の渋滞や事故等の走行に影響を与えるイベント情報を含んでいてもよい。リンクの情報には、リンク方向の情報(走行方向の情報)も付加される。なお、リンク単位の電力量の変化情報の代わりに、電力量の変化から導出できるリンク単位の電力消費量の情報をプローブ情報としてもよい。
【0026】
走行可能範囲受信部16では、通信端末10を介して走行可能範囲情報を受信し、走行可能範囲情報を表示部17に出力する。
【0027】
表示部17は、ナビゲーション装置3のディスプレイである。表示部17では、走行可能範囲受信部16から走行可能範囲情報を入力すると、その走行可能範囲を表示する。走行可能範囲の表示方法としては、例えば、地図上に表示されているルートを走行可能範囲と走行不能範囲とで色分け、地図上に到達可能地点を強調表示、高速道路や有料道路の場合には到達可能なインターチェンジ、サービスエリア、パーキングエリア等を強調表示等で示す。
【0028】
センタ4は、車両に各種サービスを提供するセンタであり、例えば、自動車会社が運営するセンタである。特に、センタ4は、車両(運転者)の電力消費量の変化に基づく運転傾向(運転特性)を分析し、その分析した運転傾向に応じて走行可能範囲情報を提供する。第1の実施の形態では、センタ4については、この運転傾向を分析して走行可能範囲情報を提供する機能について詳細に説明する。
【0029】
センタ4では、各車両からプローブ情報を収集し、プローブ情報を蓄積する。そして、センタ4では、運転支援対象の車両が走行中のルートについて蓄積されているプローブ情報を用いて、そのルートでの電力消費量の変化から複数の運転傾向のグループに分類し、その分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定し、その推定したグループの電力消費量から走行可能範囲を計算し、その走行可能範囲情報を運転支援対象の車両に送信する。
【0030】
そのために、センタ4は、通信端末20、電力プローブ受信部21、プローブ情報記憶部22、運転傾向分析部23、走行可能範囲送信部24を備えている。なお、本実施の形態では、通信端末20及び電力プローブ受信部21が特許請求の範囲に記載の収集手段に相当し、運転傾向分析部23が特許請求の範囲に記載の運転特性推定手段に相当する。
【0031】
通信端末20は、各車両との無線通信を行うための通信端末である。通信端末20で送信する情報としては、走行可能範囲情報等がある。通信端末20で受信する情報としては、各車両のプローブ情報等がある。
【0032】
電力プローブ受信部21では、通信端末20を介して車両からプローブ情報を受信し、そのプローブ情報をプローブ情報記憶部22に記憶させる。
【0033】
プローブ情報記憶部22は、センタ4の記憶装置内に確保される記憶領域である。プローブ情報記憶部22に記憶される情報は、各車両から収集されたプローブ情報であり、各車両が走行したルート毎に少なくともリンク単位の電力量の変化情報(電力消費量の変化情報の場合もある)が蓄積される。
【0034】
運転傾向分析部23は、運転支援対象の車両からプローブ情報が送信されると、その車両が走行中のルートについてプローブ情報記憶部22に記憶されているプローブ情報を参照し、そのルートにおける運転支援対象の車両の運転傾向を分析する。
【0035】
具体的には、運転傾向分析部23では、プローブ情報記憶部22に記憶されている情報の中から、運転支援対象の車両が走行するルートと同じルート(ルートを全て含むもの、ルートの一部だけを含むもの)かつ同じリンク方向(走行している方向が同じ)の走行結果(プローブ情報)を抽出する。そして、運転傾向分析部23では、ルート上を複数の区間に分割し、抽出した全ての走行結果についての各区間での電力消費量の変化情報を用いる。分割する区間としては、基本的にはリンク単位の区間であり、勾配変化点間等の複数のリンクを繋げた区間でもよい。なお、プローブ情報がリンク単位の電力量の変化情報の場合、リンク単位の電力量の変化からリンク単位の電力消費量の変化を計算する。そして、運転傾向分析部23では、抽出した全ての走行結果(プローブ情報)について、ルート上の各区間の電力消費量の変化をそれぞれ比較し、ルート全体で各区間の電力消費量の差分が小さい走行結果同士を運転傾向(運転特性)が類似しているグループとして分類する。これによって、様々な車両(運転者)が同じルートを同じ向きで走行した場合の走行結果の中で、ルート全体を通して電力変化量の変化が類似している走行結果が同じグループとなり、複数のグループに分類される。このグループ分けの手法は、従来の手法を適用し、例えば、従来のクラスタリング手法を適用する。
【0036】
さらに、運転傾向分析部23では、運転支援対象の車両(運転者)が走行中のルートにおける走行済みのリンク単位の電力量の変化情報(電力消費量の変化情報)を用いて、分類したグループ毎にグループのルート上を各区間の電力消費量の変化と運転支援対象の車両のルート上の走行済みの各区間の電力消費量の変化とを比較し、分類した複数のグループの中から電力消費量の変化が最も近いグループを選択する。ここでは、運転支援対象の車両のルート上での現在位置が進み、走行済みのリンク単位の電力量の変化情報が増える毎に最も近いグループを選択するので、初めに選択されたグループから他のグループに遷移する場合もある。
【0037】
なお、運転傾向分析部23では、プローブ情報として渋滞や事故等のイベント情報も蓄積されている場合、分析する際にイベント情報をノイズとして付与し、分析を行ってもよい。このようなイベント情報が含まれる走行結果の場合、渋滞や事故によって速度低下でモータによる電力消費力は減るが、エアコンによる電力消費量が増えるので、イベントがない場合と電力消費量の変化の仕方が異なり、別のグループに分類されたり、あるいは、孤立した走行結果として破棄される。また、運転傾向分析部23では、プローブ情報としてアクセル開度や車速等の情報も蓄積されている場合、これらの情報も考慮して分析を行ってもよい。また、運転傾向分析部23では、プローブ情報としてエアコン等の電力を消費する各種装置のON/OFF情報も蓄積されている場合、これらの情報も考慮して分析を行ってもよい。また、運転傾向分析部23では、プローブ情報としてリンクの旅行時間情報も蓄積されている場合、旅行時間情報も考慮して分析を行ってもよい。
【0038】
走行可能範囲送信部24は、運転傾向分析部23で分析した運転支援対象の車両(運転者)の運転傾向のグループを用いて走行可能範囲を計算し、走行可能範囲の情報を通信端末20を介して該当する車両に送信する。
【0039】
具体的には、走行可能範囲送信部24では、運転傾向分析部23で選択したグループの電力消費量の変化を用いて、運転支援対象の車両が走行中のルート上における現在位置から先の電力消費量の変化からなる走行計画を立て、その走行計画に基づいて現在のバッテリの電力量で走行中のルート上において走行可能(到達可能)な地点(リンク単位)を計算する。ここでは、バッテリの電力量(SOC)が0%になる地点ではなく、バッテリの電力量に所定量(例えば、10%、20%)残っている地点を計算する。特に、ルートが高速道路や有料道路等の特定のポイント(インターチェンジ、サービスエリア、パーキングエリア)以外でルートの途中で外れることが不能な道路上にルートが設定された場合、その特定のポイントに到達できるか否かで判定する。なお、この到達可能地点の計算や判定では、高速道路(有料道路)/一般道路、道路勾配等の道路特性を考慮するとよい。ちなみに、高速で走行するほど、風による抵抗で電力消費量が多くなり、走行可能距離が短くなる。また、上り勾配ほど、電力消費量が多くなり、走行可能距離が短くなる。
【0040】
図1を参照して、運転支援システム1における動作について説明する。各車両のナビゲーション装置3では、一定時間毎に、現在位置を検出している。また、ナビゲーション装置3では、運転者による入力操作に応じて目的地を受け付けると、現在位置から目的地までの経路(ルート)を生成する。また、ナビゲーション装置3では、一定時間毎に、バッテリの電力量を検出している。
【0041】
ルートの走行を開始すると、各車両のナビゲーション装置3では、定期的(例えば、一定時間毎、一定距離走行毎、リンク走行毎)に、リンク単位の電力量の変化情報を含むプローブ情報を生成し、プローブ情報をセンタ4に送信する。センタ4では、各車両からのプローブ情報を受信する毎に、プローブ情報を蓄積する。
【0042】
あるルートを走行中の運転支援対象の車両からプローブ情報を受信する毎に(リンク走行毎でもよい)、センタ4では、蓄積されている情報のうち運転支援対象の車両が走行するルートと同じルートについての全ての走行結果を参照し、電力消費量の変化が類似する走行結果同士をグループ分けし、その分けたグループの中から運転支援対象の車両がルート上での現在位置までの電力消費量の変化に最も近いグループを選択する。さらに、センタ4では、選択したグループの電力消費量の変化を用いて、運転支援対象の車両が走行中のルート上における現在位置から先の走行計画を立て、その走行計画に基づいて現在のバッテリの残電力量でルート上において走行可能な地点を判断する。そして、センタ4では、その走行可能な地点の情報(走行可能範囲情報)を運転支援対象の車両に送信する。
【0043】
運転支援対象の車両のナビゲーション装置3では、その走行可能な地点の情報を受信し、その走行可能な地点の情報を表示する。運転者は、この情報を見ることによって、現在の電力量でどこまで行くころができるかを一目で知ることができる。そして、運転者は、この地点に到達する前に、充電スポットを見つけ、充電を行う。
【0044】
センタ4及び運転支援対象の車両のナビゲーション装置3では、ルートの目的地に到達するまで上記の処理を繰り返し行う。この繰り返し行われる処理によって、運転支援対象の車両(運転者)の運転傾向として分析されるグループが、途中で異なるグループに遷移する場合がある。その結果、走行可能な地点も変化する場合がある。
【0045】
この運転支援システム1によれば、任意のルートに対して多数な車両(運転者)から収集した電力量の変化情報に基づいて分類した運転傾向の中から運転支援対象の車両(運転者)の運転傾向を推定することにより、運転支援対象の車両(運転者)の運転傾向(運転特性)を考慮して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。特に、運転支援システム1によれば、運転支援として現在のバッテリの電力量でルート上において走行可能範囲情報(到達可能な地点情報)を提供することにより、運転者が走行可能距離を動的に判断(例えば、道路勾配、エアコンのON/OFF等を考慮して、装置側が提示している走行可能距離から到達可能地点を判断)することなく、ルート上でどこまで行けるかという一点だけを知ることができる。また、運転支援システム1によれば、他の車両の走行結果を使って運転傾向を推定することにより、初めて走行するルートでも、そのルート上における走行可能範囲情報を判断できる。
【0046】
また、運転支援システム1によれば、ルート上のリンク単位の電力消費量の変化に基づいて運転傾向を分析し、その運転傾向から電力消費量の走行計画を立てることにより、勾配情報、風、天気、気温、車両特性等の詳細な計算を行わなくてもルート上における走行可能範囲を判断することができる。例えば、異なる車種の車両で同じルートを各運転者が同じような運転操作特性で走行した場合でも、車両特性が異なる車両であれば、電力消費量の変化が異なり、異なる運転傾向のグループとして分類されることになる。したがって、車両特性を考慮しないでグループ分けしても、車両特性が異なる運転傾向のグループに分けられることになる。また、運転支援システム1によれば、電力消費量の変化の仕方によって運転者の運転方法を間接的に特徴付けて運転者の運転傾向をグループ分けして学習することにより、定式として計算が困難な電力消費量を正確に計算することなく、運転者の運転傾向を推定でき、ルート上でどこまで到達できるかを正確に判断できる。
【0047】
また、運転支援システム1によれば、運転支援対象の車両がルートの目的地に到達するまで定期的にその車両(運転者)の運転傾向を分析するので、運転支援対象の車両のルート上の現在位置が進み、リンク単位の電力消費量の変化情報が増えるほど、高精度な分析ができ、車両(運転者)により合った運転傾向を推定でき、より正確な走行可能範囲を判断できる。さらに、運転支援システム1によれば、運転支援対象の車両がルートの目的地に到達するまで定期的にその車両(運転者)の運転傾向を分析するので、ルートの途中で運転者が変わったりあるいは運転者の体調が変化したりして運転傾向が著しく変化しても、その変化した運転傾向に類似する運転傾向を推定でき、変化した後も正確な走行可能範囲を判断できる。
【0048】
また、運転支援システム1によれば、高速道路や有料道路等の特定のポイント(インターチェンジ、サービスエリア、パーキングエリア)以外でルートの途中で外れることが不能な道路上にルートが設定された場合、ルートが変動する可能性がある一般道路よりも、高精度に運転傾向を分析でき、より正確な走行可能範囲を判断することができる。
【0049】
図2を参照して、第2の実施の形態に係る運転支援システム2について説明する。図2は、第2の実施の形態に係る運転支援システムの構成図である。
【0050】
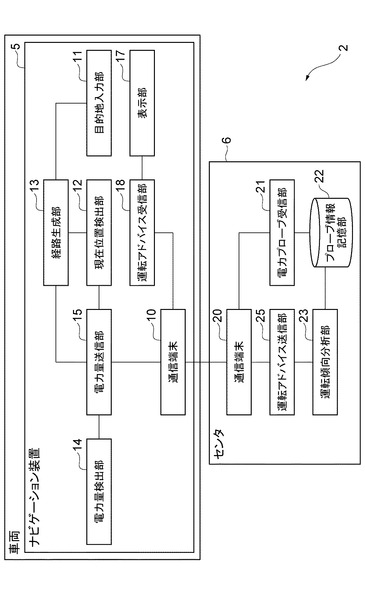
運転支援システム2は、第1の実施の形態に係る運転支援システム1と比較すると、センタ4で運転支援対象の車両(運転者)の運転傾向を推定すると、その運転傾向に基づく運転アドバイス情報を運転者に提供する点が異なる。第2の実施の形態では、この点を詳細に説明する。
【0051】
ナビゲーション装置5は、第1の実施の形態に係るナビゲーション装置3と比較すると、センタ4からの運転アドバイス情報を受信すると、その運転アドバイス情報を表示する点だけが異なる。ナビゲーション装置5は、通信端末10、目的地入力部11、現在位置検出部12、経路生成部13、電力量検出部14、電力量送信部15、運転アドバイス受信部18、表示部17を備えている。なお、通信端末10、目的地入力部11、現在位置検出部12、経路生成部13、電力量検出部14、電力量送信部15は、第1の実施の形態に係るナビゲーション装置3に備えられるものと同様のものなので、説明を省略する。
【0052】
運転アドバイス受信部18は、通信端末10を介して運転アドバイス情報を受信し、運転アドバイス情報を表示部17に出力する。表示部17では、運転アドバイス受信部18から運転アドバイス情報を入力すると、その運転アドバイス情報を表示する。例えば、アドバイスをテキストで示したり、電力消費量の変化のグラフで示す。
【0053】
センタ6は、第1の実施の形態に係るセンタ4と比較すると、運転支援対象の車両の運転特性を推定すると、その推定した運転傾向よりも有利な運転傾向(例えば、より電力消費量の少ない運転傾向、より短時間で到達できる運転傾向)になるための運転のアドバイス情報や推定した運転傾向に沿った現状維持のための運転のアドバイス等を生成し、その運転アドバイス情報を運転支援対象の車両に送信する。
【0054】
センタ6は、通信端末20、電力プローブ受信部21、プローブ情報記憶部22、運転傾向分析部23、運転アドバイス送信部25を備えている。通信端末20、電力プローブ受信部21、プローブ情報記憶部22、運転傾向分析部23は、第1の実施の形態に係るセンタ4に備えられるものと同様のものなるので、説明を省略する。
【0055】
運転アドバイス送信部25は、運転傾向分析部23で分析した運転支援対象の車両(運転者)の運転傾向よりも有利な運転傾向になるための運転のアドバイスや運転傾向に沿った現状維持の運転のアドバイス等を生成し、運転アドバイスの情報を通信端末20を介して該当する車両に送信する。
【0056】
具体的には、運転アドバイス送信部25では、運転支援対象の車両(運転者)の現在の運転傾向グループよりも有利な運転傾向グループの中から最も差の少ない運転傾向グループ(1段階有利な運転傾向グループ)を選択する。そして、運転アドバイス送信部25では、現在の運転傾向グループと選択した運転傾向グループとの差を生じさせている運転方法を抽出して運転のアドバイスや注意点を生成する。例えば、電力消費量を抑えるために速度を下げるためのアクセル開度やアクセルのON/OFFタイミングのアドバイス、走行時間を短くするために速度を上げるためのアクセル開度やアクセルのON/OFFタイミングのアドバイス、電力消費量の変動を抑えるために一定速度で走行するための注意がある。
【0057】
より有利な運転傾向としては、高速道路等のように充電可能なポイント(サービスエリア、パーキングエリア等)が固定され、ルートを外れることが困難な場合には到達可能な充電ポイントに到達したときのバッテリの電力量がより多くなる(電力消費量が少なくなる)ような運転傾向あるいは到達可能な充電ポイントまでより短時間で到達できるような運転傾向があり、一般道路等のように運転者によってルートが変動する可能性がある場合にはより遠くに行くことができる(電力消費量が少なくなる)ような運転傾向である。
【0058】
より短時間で到達できる運転傾向の場合、例えば、高速道路においてルート途中の特定の充電ポイントで充電しなければならないと判定された場合、時速80km固定で走行するよりも、時速100km固定で走行し、充電ポイントまでの走行時間を短くする。これによって、短縮される走行時間の方が車速アップで電力消費量が増えることによって延びる充電時間よりも大きければ、ルート全体としてのトリップ時間が短くなるので、有利な運転となる。なお、車速をアップしたことで電力消費量が増加するが、到達可能地点の判定では最終的に残る電力量に余裕を持たせて判定しているので、電力消費量が多少増加しても、判定された充電可能ポイントに十分に到達可能である。ちなみに、時間に関する運転アドバイスの場合、車両から各リンクの旅行時間情報をセンタ4に提供し、リンクの旅行時間情報を加味して運転傾向の分析や運転アドバイスの生成を行う。
【0059】
また、運転アドバイス送信部25では、運転支援対象の車両(運転者)の現在の運転傾向グループのルート全体での電力消費量の走行計画をグラフ化(グラフは線ではなく、電力消費量にある程度幅を持たせた帯状とする)するとともに、運転支援対象の車両がルートを走行開始から現在までの電力消費量の変化をグラフ化し、この2つのグラフを重畳したものを生成する。そして、運転アドバイス送信部25では、現在の運転傾向グループの電量消費量の帯状グラフの範囲内に運転支援対象の車両の電力消費量の線グラフが入っている場合には、走行計画通りに運転できていることを示す現状維持のアドバイスを生成する。例えば、現状の車速(アクセル開度)を維持するアドバイスがある。運転アドバイス送信部25では、運転アドバイス情報以外に、上記のようなグラフも車両に送信するようにしてもよい。運転者は、このようなグラフを見ることによって、現状の電力消費量を的確に把握できる。なお、現在の運転傾向グループの電量消費量の帯状グラフの範囲内に運転支援対象の車両の電力消費量の線グラフが入らない場合、現状の運転傾向グループから外れているので、運転支援対象の車両(運転者)の運転傾向グループが現在の運転傾向グループから他の運転傾向グループに更新されることになる。
【0060】
なお、運転傾向をより詳細に分析し、運転アドバイスをより的確なものとするために、車両からアクセル開度、車速、エアコンやライト等の装置のON/OFF情報等の情報をセンタ4に提供し、これらの情報も加味して運転傾向の分析や運転アドバイスの生成をすることが望ましい。
【0061】
ちなみに、運転アドバイスとしては、以下のようなアドバイスを行ってもよい。ルート上の各区間からチャンピオンデータを抽出する。チャンピンデータとしては、例えば、グループの中で最も電力消費量の少ないデータ、最も短時間で走行するデータがある。そして、その各区間のチャンピオンデータを繋ぎ合わせて最も理想的なデータとし、そのデータから運転方法を認識し、その運転方法に基づいて運転アドバイスを生成する。
【0062】
図2を参照して、運転支援システム2における動作について説明する。運転支援システム2における動作では、センタ6で運転傾向を分析するまでの動作は第1の実施の形態に係る運転支援システム1における動作と同様の動作なので、それ以降の動作について説明する。
【0063】
あるルートを走行中の運転支援対象の車両からプローブ情報を受信する毎に(リンク走行毎でもよい)、センタ6では、運転支援対象の車両(運転者)の運転傾向のグループを分析すると、分類した全ての運転傾向グループの中から現状の運転傾向グループよりも有利な運転傾向グループを選択し、現状の運転傾向グループとより有利な運転傾向グループとの差に基づいて運転アドバイスを生成する。そして、センタ6では、その運転アドバイス情報を運転支援対象の車両に送信する。
【0064】
運転支援対象の車両のナビゲーション装置5では、その運転アドバイス情報を受信し、その運転アドバイス情報を表示する。運転者はこの情報を見てアドバイスの運転操作を行うことによって、電力消費量を抑えてより遠くまで行けたり、あるいは、到達可能な充電ポイントまでより短時間で到達できる。その結果、より少ない充電回数や充電時間となったり、あるいは、ルート全体でのトリップ時間を短縮できる。なお、より有利な運転アドバイスではなく、計画通りに電力消費がされているかの運転アドバイスの場合もある。
【0065】
センタ6及び運転支援対象の車両のナビゲーション装置5では、ルートの目的地に到達するまで上記の処理を繰り返し行う。この繰り返し行われる処理によって、運転支援対象の車両(運転者)の運転傾向として分析されたグループが、途中で異なるグループに遷移する場合がある。その結果、運転アドバイスも変化する場合がある。
【0066】
この運転支援システム2によれば、第1の実施の形態に係る運転支援システム1と同様に運転支援対象の車両(運転者)の運転傾向を分析して、その運転傾向を考慮して運転支援を行うので、運転支援システム1と同様の効果を有する。特に、運転支援システム2によれば、運転支援として運転アドバイス情報を提供することにより、より有利な運転に変えることができたりあるいは計画通りに電力が消費できているかを確認できる。また、運転支援システム2によれば、ルート全体の電力消費量の計画に基づいてアドバイスを生成することにより、瞬間瞬間の運転方法のアドバイスではなく、ルート全体に対して現在の運転という形で俯瞰してアドバイスを捉えることができる。また、運転支援システム2によれば、勾配情報、風、天気、気温、車両特性等の詳細な計算を行わなくてもルート上における電力消費計画を把握でき、その電力消費計画から的確な運転アドバイスを生成することができる。
【0067】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0068】
例えば、本実施の形態ではセンタで車両からプローブ情報を収集し、センタで運転傾向の分析等を行うセンタと車両(ナビゲーション装置)からなる運転支援システムに適用したが、他の構成でもよく、例えば、車載機で情報を収集し、車載機で運転傾向の分析等を行う構成でもよい。また、本実施の形態では電気自動車に適用したが、駆動源としてモータ以外にエンジンを有するハイブリッドカーにも適用可能である。
【0069】
また、第1の実施の形態では走行可能範囲情報を提供し、第2の実施の形態では運転アドバイス情報を提供したが、センタで各車両の運転者の運転傾向から走行可能範囲情報を判断するとともに運転アドバイス情報を生成し、車両で両方の情報を提供する構成としてもよい。また、各車両の運転傾向から他の運転支援情報を生成し、他の運転支援情報を提供してもよい。
【0070】
また、本実施の形態では運転支援の情報を表示することによって提供する構成としたが、音声出力等の他の手段で情報提供してもよいし、あるいは、情報提供以外の運転支援を行ってもよい。
【0071】
また、本実施の形態では車両において運転者によって目的地が入力され、その目的地までの経路(ルート)を生成した場合に電力量の変化情報を含むプローブ情報をセンタに送信する構成としたが、走行中、常時、電力量の変化情報を含むプローブ情報をセンタに送信してもよい。
【0072】
また、本実施の形態では目的地入力部で運転者が目的地を明示的に入力した場合としたが、装置側で自動的に目的地相当の情報を設定することも可能であるなら、その目的地を利用してもよい。
【0073】
また、本実施の形態では運転支援対象の車両がルートの目的地に到達するまで定期的にその車両(運転者)の運転傾向を分析し、運転支援情報を生成する構成としたが、運転支援対象の車両がルートの所定区間(例えば、1/2程度、1/3程度)まで走行した時点で運転傾向の分析や運転支援情報の生成を終了してもよいし、あるいは、運転者からの要求があるときだけ運転傾向の分析や運転支援情報の生成を行ってもよい。
【0074】
また、センタで多数の車両から各走行ルートについての電力量の変化情報を含むプローブ情報を収集するとともに、運転支援対象の車両の電力量の変化情報に基づいてその車両の運転者の運転特性を推定し、運転支援対象の車両が任意の走行ルートを走行する場合、その推定した運転支援対象の車両の運転者の運転特性に任意の走行ルートについての様々な車両から収集された電力量の変化情報を用いて運転支援対象の車両の運転者の運転特性を修正し、その修正した運転特性に基づいて運転支援対象の車両を運転支援(例えば、走行ルート上で到達可能地点情報の情供、走行ルート上での省エネルギ走行情報を提供)するようにしてもよい。
【符号の説明】
【0075】
1、2…運転支援システム、3,5…ナビゲーション装置、4,6…センタ、10…通信端末、11…目的地入力部、12…現在位置検出部、13…経路生成部、14…電力量検出部、15…電力量送信部、16…走行可能範囲受信部、17…表示部、18…運転アドバイス受信部、20…通信端末、21…電力プローブ受信部、22…プローブ情報記憶部、23…運転傾向分析部、24…走行可能範囲送信部、25…運転アドバイス送信部。
【技術分野】
【0001】
本発明は、駆動源としてモータを有する車両に対して運転支援する運転支援装置に関する。
【背景技術】
【0002】
電気自動車は、バッテリからモータに電力を供給し、モータによる駆動力で走行する。したがって、電気自動車の場合、バッテリの電力量が不足する前に充電しなければ、走行不能となる。そこで、運転支援装置には、電力消費量を少なくするための情報の提供や残電力量での走行可能距離情報の提供等を行うものがある。特許文献1には、各リンクにおける電力回生量のデータを含むプローブ情報を受信し、そのプローブ情報に基づいて各リンクの電力回生量に関するコスト変数値を求めて地図データ記憶部に記憶しておき、現在位置から目的地までの候補経路毎に候補経路を構成する各リンクに付与されたコスト変数値に基づいて経路コストを計算し、複数の候補経路の中から経路コストが最小となる経路を提供することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−101745号公報
【特許文献2】特開2011−59921号公報
【特許文献3】特開2006−300780号公報
【特許文献4】特開2009−257966号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の発明では、電気回生量という車両側の特性を考慮して燃費の良い経路を提供している。しかし、電気自動車における電力消費は、アクセル開度等の運転者個々の運転特性による影響を大きく受ける。したがって、提供される燃費の良い経路は、運転者によっては燃費の良い経路となっていない場合がある。
【0005】
そこで、本発明は、運転者個々に適した運転支援を行う運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る運転支援装置は、駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、運転支援対象の車両が走行する任意の走行ルートについて収集手段で収集した電力量の変化情報に基づいて複数の運転特性に分類し、該分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定する運転特性推定手段とを備え、運転特性推定手段で推定した運転特性に基づいて運転支援対象の車両を運転支援することを特徴とする。
【0007】
この運転支援装置では、多数の車両から各走行ルートについての電力量の変化情報を収集する。この電力量の変化情報は、バッテリの電力量自体の変化情報でもよいし、車両における電力消費量の変化情報でもよい。ある走行ルートを様々な車両(様々な運転者)が走行した場合、運転者の運転操作特性等によって様々なバッテリの電力量の変化(ひいては、電力消費量の変化)を示すが、その中には電力消費量の変化の仕方が類似しているものが存在する。そこで、運転支援装置では、運転支援対象の車両が走行する任意の走行ルートについて、収集されている電力量の変化情報に基づいて、電力消費量の変化が類似している同士で複数の運転特性に分類する。そして、運転支援装置では、その任意の走行ルートに対して分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定する。運転支援対象の車両(運転者)は、その任意の走行ルートを走行中、推定された運転特性の電力消費量の変化と同様の電力消費で走行すると予測できる。そこで、運転支援装置では、その任意の走行ルートを走行中に、推定した運転特性に基づいて運転支援対象の車両を運転支援する。このように、運転支援装置では、任意の走行ルートに対して様々な車両から収集した電力量の変化情報に基づいて分類した運転特性の中から運転支援対象の車両(運転者)の運転特性を推定することにより、運転支援対象の車両(運転者)個々の運転特性を考慮して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。
【0008】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転特性に基づいて運転支援対象の車両における現在の電力量で任意の走行ルート上での到達可能地点を予測し、該到達可能地点を運転支援対象の車両で提供する。このように、運転支援装置では、推定された運転特性から任意の走行ルート全体における電力消費量の変化を予測できるので、その電力消費量の変化の予測値に基づいて現在の電力量によって走行ルート上でどこまで走行できるかを高精度に判断でき、運転者に走行ルート上での到達可能地点情報を提供できる。これによって、運転者は、走行ルート上での到達可能地点(どこまで走行できるか)を知ることができる。
【0009】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転特性に基づいて任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を運転支援対象の車両で提供する。このように、運転支援装置では、推定された運転特性から任意の走行ルートにおける電力消費量の変化を予測できるので、その電力消費量の変化の予測値に基づいてそれよりもエネルギ消費量(電力消費量)を抑える運転をするための情報を得ることができ、運転者に省エネルギ運転情報を提供できる。運転者は、その省エネルギ運転情報に従って運転することにより、車両のエネルギ消費量を抑えることができる。その結果、より遠くまで行くことができ、充電回数や充電時間を減らすことができる。
【0010】
本発明に係る運転支援装置は、駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、運転支援対象の車両の電力量の変化情報に基づいて運転者の運転特性を推定する運転特性推定手段とを備え、運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて運転支援対象の車両を運転支援することを特徴とする。
【0011】
この運転支援装置では、多数の車両から各走行ルートについての電力量の変化情報を収集する。ある走行ルートを車両(運転者)が走行した場合、その運転者の運転操作特性によってその運転者特有のバッテリの電力量の変化(ひいては、電力消費量の変化)を示す。そこで、運転支援装置では、運転支援対象の車両の電力量の変化情報に基づいて運転者の運転特性を推定する。そして、運転支援装置では、運転支援対象の車両が任意の走行ルートを走行する場合、推定した運転支援対象の車両の運転者の運転特性に任意の走行ルートについて収集された電力量の変化情報を用いて運転特性を修正し、その修正した運転特性に基づいて運転支援対象の車両を運転支援する。このように、運転支援装置では、運転支援対象の車両の電力量の変化情報から推定した運転者の運転特性に任意の走行ルートに対して様々な車両から収集された電力量の変化情報を用いて運転支援対象の車両(運転者)の運転特性を修正することにより、運転支援対象の車両(運転者)個々の運転特性を考慮しつつ様々な車両(運転者)の運転特性を加味して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。
【0012】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて運転支援対象の車両における現在の電力量で任意の走行ルート上での到達可能地点を予測し、該到達可能地点を運転支援対象の車両で提供する。このように、運転支援装置では、運転支援対象の車両の電力量の変化情報から推定した運転者の運転特性に任意の走行ルートに対して様々な車両から収集された電力量の変化情報を加味した運転支援対象の車両(運転者)の運転特性に基づいて現在の電力量によって任意の走行ルート上でどこまで走行できるかを高精度に判断でき、運転者に走行ルート上での到達可能地点情報を提供できる。これによって、運転者は、走行ルート上での到達可能地点(どこまで走行できるか)を知ることができる。
【0013】
本発明の上記運転支援装置では、運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を運転支援対象の車両で提供する。このように、運転支援装置では、運転支援対象の車両の電力量の変化情報から推定した運転者の運転特性に任意の走行ルートに対して様々な車両から収集された電力量の変化情報を加味した運転支援対象の車両(運転者)の運転特性に基づいて任意の走行ルート上でエネルギ消費量(電力消費量)を抑える運転をするための情報を得ることができ、運転者に省エネルギ運転情報を提供できる。運転者は、その省エネルギ運転情報に従って運転することにより、車両のエネルギ消費量を抑えることができる。その結果、より遠くまで行くことができ、充電回数や充電時間を減らすことができる。
【発明の効果】
【0014】
本発明によれば、任意の走行ルートに対して様々な車両から収集した電力量の変化情報に基づいて分類した運転特性の中から運転支援対象の車両(運転者)の運転特性を推定することにより、運転支援対象の車両(運転者)個々の運転特性を考慮して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。
【図面の簡単な説明】
【0015】
【図1】第1の実施の形態に係る運転支援システムの構成図である。
【図2】第2の実施の形態に係る運転支援システムの構成図である。
【発明を実施するための形態】
【0016】
以下、図面を参照して、本発明に係る運転支援装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0017】
本実施の形態では、本発明に係る運転支援装置を、車両(特に、ナビゲーション装置)とセンタによって構成される運転支援システムに適用する。本実施の形態に係る運転支援システムでは、車両とセンタとが無線で通信可能である。本実施の形態に係る車両は、電気自動車であり、外部から充電可能なバッテリと駆動源としてのモータを備えており、バッテリからモータに電力を供給し、モータによる駆動力で走行する。また、本実施の形態に係る車両は、プローブカーとして機能し、センタにプローブ情報を提供する。本実施の形態に係るセンタは、各車両からプローブ情報を収集し、プローブ情報に基づいて各車両に各種サービス情報を提供する。特に、本実施の形態では、第1の実施の形態が現在の残電力量での走行可能範囲情報を提供する形態であり、第2の実施の形態が運転アドバイス情報を提供する形態である。
【0018】
図1を参照して、第1の実施の形態に係る運転支援システム1について説明する。図1は、第1の実施の形態に係る運転支援システムの構成図である。
【0019】
運転支援システム1は、センタ4とセンタ4との無線通信が可能な各車両のナビゲーション装置3によって構成され、センタ4と各車両間で情報を送受信する。特に、運転支援システム1では、各車両から少なくとも電力量の変化情報を含むプローブ情報をセンタ4で収集して蓄積し、センタ4でプローブ情報を用いて電力消費量の変化による運転傾向(運転特性)を学習し、運転支援対象の車両(運転者)の運転傾向を推定し、その運転傾向による電力消費量の変化に基づく走行可能範囲を運転者に提供する。
【0020】
ナビゲーション装置3は、現在位置検出機能、地図表示機能、目的地設定機能、経路探索機能、経路案内機能等の通常の機能の他にセンタ4にプローブ情報を送信するとともにセンタ4から送信されたサービス情報を運転者に提供する機能を有している。第1の実施の形態では、ナビゲーション装置3については、このセンタ4との間で行う機能について詳細に説明する。
【0021】
ナビゲーション装置3では、運転者によって目的地が入力され、その目的地までの経路(ルート)を生成した場合、ルート走行中にプローブ情報をセンタ4に送信する。また、ナビゲーション装置3では、センタ4からの走行可能範囲情報を受信すると、その走行可能範囲情報を表示する。そのために、ナビゲーション装置3は、通信端末10、目的地入力部11、現在位置検出部12、経路生成部13、電力量検出部14、電力量送信部15、走行可能範囲受信部16、表示部17を備えている。
【0022】
通信端末10は、センタ4との無線通信を行うための通信端末である。通信端末10で送信する情報としては、プローブ情報がある。プローブ情報には、車両の識別番号、目的地入力部11で入力された目的地、経路生成部13で生成された経路(ルート)の情報等が付加される。通信端末10で受信する情報としては、走行可能範囲情報等がある。
【0023】
目的地入力部11では、運転者による入力操作を受け付け、その入力操作に応じた目的地を設定する。現在位置検出部12では、一定時間毎に、車両の現在位置や進行方向を検出する。経路生成部13では、目的地入力部11で目的地が設定されると、現在位置検出部12で検出した現在位置から目的地までの経路を計算する。なお、この目的地入力部11、現在位置検出部12、経路生成部13による各機能は、従来のナビゲーション装置における各機能と同様の機能である。
【0024】
電力量検出部14は、バッテリの現在の電力量(残充電量)を検出するセンサ(特に、SOCセンサ)である。本実施の形態では、電力量としては、SOC[State Of Charge](バッテリの最大電力量に対する残電力量の割合(%))を用いる。電力量検出部14では、一定時間毎に、現在の電力量を検出すると、検出した電力量を電力量送信部15に出力する。
【0025】
電力量送信部15では、経路生成部13で生成されたルートを走行中に、現在位置検出部12で一定時間毎に検出される現在位置に基づいて、走行中のリンクの開始から終了までの区間を判定する。そして、電力量送信部15では、電力量検出部14で一定時間毎に検出される電力量を用いて、リンク単位の電力量の変化情報を含むプローブ情報を生成し、そのプローブ情報を通信端末10を介してセンタ4に送信する。このプローブ情報には、リンク単位の電力量の変化情報の他にも、リンク旅行時間情報、アクセル開度情報、速度情報、エアコンやライト等の電力を消費する各種装置のON/OFF情報、ルート上の渋滞や事故等の走行に影響を与えるイベント情報を含んでいてもよい。リンクの情報には、リンク方向の情報(走行方向の情報)も付加される。なお、リンク単位の電力量の変化情報の代わりに、電力量の変化から導出できるリンク単位の電力消費量の情報をプローブ情報としてもよい。
【0026】
走行可能範囲受信部16では、通信端末10を介して走行可能範囲情報を受信し、走行可能範囲情報を表示部17に出力する。
【0027】
表示部17は、ナビゲーション装置3のディスプレイである。表示部17では、走行可能範囲受信部16から走行可能範囲情報を入力すると、その走行可能範囲を表示する。走行可能範囲の表示方法としては、例えば、地図上に表示されているルートを走行可能範囲と走行不能範囲とで色分け、地図上に到達可能地点を強調表示、高速道路や有料道路の場合には到達可能なインターチェンジ、サービスエリア、パーキングエリア等を強調表示等で示す。
【0028】
センタ4は、車両に各種サービスを提供するセンタであり、例えば、自動車会社が運営するセンタである。特に、センタ4は、車両(運転者)の電力消費量の変化に基づく運転傾向(運転特性)を分析し、その分析した運転傾向に応じて走行可能範囲情報を提供する。第1の実施の形態では、センタ4については、この運転傾向を分析して走行可能範囲情報を提供する機能について詳細に説明する。
【0029】
センタ4では、各車両からプローブ情報を収集し、プローブ情報を蓄積する。そして、センタ4では、運転支援対象の車両が走行中のルートについて蓄積されているプローブ情報を用いて、そのルートでの電力消費量の変化から複数の運転傾向のグループに分類し、その分類した複数の運転特性の中から運転支援対象の車両の運転特性を推定し、その推定したグループの電力消費量から走行可能範囲を計算し、その走行可能範囲情報を運転支援対象の車両に送信する。
【0030】
そのために、センタ4は、通信端末20、電力プローブ受信部21、プローブ情報記憶部22、運転傾向分析部23、走行可能範囲送信部24を備えている。なお、本実施の形態では、通信端末20及び電力プローブ受信部21が特許請求の範囲に記載の収集手段に相当し、運転傾向分析部23が特許請求の範囲に記載の運転特性推定手段に相当する。
【0031】
通信端末20は、各車両との無線通信を行うための通信端末である。通信端末20で送信する情報としては、走行可能範囲情報等がある。通信端末20で受信する情報としては、各車両のプローブ情報等がある。
【0032】
電力プローブ受信部21では、通信端末20を介して車両からプローブ情報を受信し、そのプローブ情報をプローブ情報記憶部22に記憶させる。
【0033】
プローブ情報記憶部22は、センタ4の記憶装置内に確保される記憶領域である。プローブ情報記憶部22に記憶される情報は、各車両から収集されたプローブ情報であり、各車両が走行したルート毎に少なくともリンク単位の電力量の変化情報(電力消費量の変化情報の場合もある)が蓄積される。
【0034】
運転傾向分析部23は、運転支援対象の車両からプローブ情報が送信されると、その車両が走行中のルートについてプローブ情報記憶部22に記憶されているプローブ情報を参照し、そのルートにおける運転支援対象の車両の運転傾向を分析する。
【0035】
具体的には、運転傾向分析部23では、プローブ情報記憶部22に記憶されている情報の中から、運転支援対象の車両が走行するルートと同じルート(ルートを全て含むもの、ルートの一部だけを含むもの)かつ同じリンク方向(走行している方向が同じ)の走行結果(プローブ情報)を抽出する。そして、運転傾向分析部23では、ルート上を複数の区間に分割し、抽出した全ての走行結果についての各区間での電力消費量の変化情報を用いる。分割する区間としては、基本的にはリンク単位の区間であり、勾配変化点間等の複数のリンクを繋げた区間でもよい。なお、プローブ情報がリンク単位の電力量の変化情報の場合、リンク単位の電力量の変化からリンク単位の電力消費量の変化を計算する。そして、運転傾向分析部23では、抽出した全ての走行結果(プローブ情報)について、ルート上の各区間の電力消費量の変化をそれぞれ比較し、ルート全体で各区間の電力消費量の差分が小さい走行結果同士を運転傾向(運転特性)が類似しているグループとして分類する。これによって、様々な車両(運転者)が同じルートを同じ向きで走行した場合の走行結果の中で、ルート全体を通して電力変化量の変化が類似している走行結果が同じグループとなり、複数のグループに分類される。このグループ分けの手法は、従来の手法を適用し、例えば、従来のクラスタリング手法を適用する。
【0036】
さらに、運転傾向分析部23では、運転支援対象の車両(運転者)が走行中のルートにおける走行済みのリンク単位の電力量の変化情報(電力消費量の変化情報)を用いて、分類したグループ毎にグループのルート上を各区間の電力消費量の変化と運転支援対象の車両のルート上の走行済みの各区間の電力消費量の変化とを比較し、分類した複数のグループの中から電力消費量の変化が最も近いグループを選択する。ここでは、運転支援対象の車両のルート上での現在位置が進み、走行済みのリンク単位の電力量の変化情報が増える毎に最も近いグループを選択するので、初めに選択されたグループから他のグループに遷移する場合もある。
【0037】
なお、運転傾向分析部23では、プローブ情報として渋滞や事故等のイベント情報も蓄積されている場合、分析する際にイベント情報をノイズとして付与し、分析を行ってもよい。このようなイベント情報が含まれる走行結果の場合、渋滞や事故によって速度低下でモータによる電力消費力は減るが、エアコンによる電力消費量が増えるので、イベントがない場合と電力消費量の変化の仕方が異なり、別のグループに分類されたり、あるいは、孤立した走行結果として破棄される。また、運転傾向分析部23では、プローブ情報としてアクセル開度や車速等の情報も蓄積されている場合、これらの情報も考慮して分析を行ってもよい。また、運転傾向分析部23では、プローブ情報としてエアコン等の電力を消費する各種装置のON/OFF情報も蓄積されている場合、これらの情報も考慮して分析を行ってもよい。また、運転傾向分析部23では、プローブ情報としてリンクの旅行時間情報も蓄積されている場合、旅行時間情報も考慮して分析を行ってもよい。
【0038】
走行可能範囲送信部24は、運転傾向分析部23で分析した運転支援対象の車両(運転者)の運転傾向のグループを用いて走行可能範囲を計算し、走行可能範囲の情報を通信端末20を介して該当する車両に送信する。
【0039】
具体的には、走行可能範囲送信部24では、運転傾向分析部23で選択したグループの電力消費量の変化を用いて、運転支援対象の車両が走行中のルート上における現在位置から先の電力消費量の変化からなる走行計画を立て、その走行計画に基づいて現在のバッテリの電力量で走行中のルート上において走行可能(到達可能)な地点(リンク単位)を計算する。ここでは、バッテリの電力量(SOC)が0%になる地点ではなく、バッテリの電力量に所定量(例えば、10%、20%)残っている地点を計算する。特に、ルートが高速道路や有料道路等の特定のポイント(インターチェンジ、サービスエリア、パーキングエリア)以外でルートの途中で外れることが不能な道路上にルートが設定された場合、その特定のポイントに到達できるか否かで判定する。なお、この到達可能地点の計算や判定では、高速道路(有料道路)/一般道路、道路勾配等の道路特性を考慮するとよい。ちなみに、高速で走行するほど、風による抵抗で電力消費量が多くなり、走行可能距離が短くなる。また、上り勾配ほど、電力消費量が多くなり、走行可能距離が短くなる。
【0040】
図1を参照して、運転支援システム1における動作について説明する。各車両のナビゲーション装置3では、一定時間毎に、現在位置を検出している。また、ナビゲーション装置3では、運転者による入力操作に応じて目的地を受け付けると、現在位置から目的地までの経路(ルート)を生成する。また、ナビゲーション装置3では、一定時間毎に、バッテリの電力量を検出している。
【0041】
ルートの走行を開始すると、各車両のナビゲーション装置3では、定期的(例えば、一定時間毎、一定距離走行毎、リンク走行毎)に、リンク単位の電力量の変化情報を含むプローブ情報を生成し、プローブ情報をセンタ4に送信する。センタ4では、各車両からのプローブ情報を受信する毎に、プローブ情報を蓄積する。
【0042】
あるルートを走行中の運転支援対象の車両からプローブ情報を受信する毎に(リンク走行毎でもよい)、センタ4では、蓄積されている情報のうち運転支援対象の車両が走行するルートと同じルートについての全ての走行結果を参照し、電力消費量の変化が類似する走行結果同士をグループ分けし、その分けたグループの中から運転支援対象の車両がルート上での現在位置までの電力消費量の変化に最も近いグループを選択する。さらに、センタ4では、選択したグループの電力消費量の変化を用いて、運転支援対象の車両が走行中のルート上における現在位置から先の走行計画を立て、その走行計画に基づいて現在のバッテリの残電力量でルート上において走行可能な地点を判断する。そして、センタ4では、その走行可能な地点の情報(走行可能範囲情報)を運転支援対象の車両に送信する。
【0043】
運転支援対象の車両のナビゲーション装置3では、その走行可能な地点の情報を受信し、その走行可能な地点の情報を表示する。運転者は、この情報を見ることによって、現在の電力量でどこまで行くころができるかを一目で知ることができる。そして、運転者は、この地点に到達する前に、充電スポットを見つけ、充電を行う。
【0044】
センタ4及び運転支援対象の車両のナビゲーション装置3では、ルートの目的地に到達するまで上記の処理を繰り返し行う。この繰り返し行われる処理によって、運転支援対象の車両(運転者)の運転傾向として分析されるグループが、途中で異なるグループに遷移する場合がある。その結果、走行可能な地点も変化する場合がある。
【0045】
この運転支援システム1によれば、任意のルートに対して多数な車両(運転者)から収集した電力量の変化情報に基づいて分類した運転傾向の中から運転支援対象の車両(運転者)の運転傾向を推定することにより、運転支援対象の車両(運転者)の運転傾向(運転特性)を考慮して運転支援を行うことができ、運転者個々に適した運転支援を行うことができる。特に、運転支援システム1によれば、運転支援として現在のバッテリの電力量でルート上において走行可能範囲情報(到達可能な地点情報)を提供することにより、運転者が走行可能距離を動的に判断(例えば、道路勾配、エアコンのON/OFF等を考慮して、装置側が提示している走行可能距離から到達可能地点を判断)することなく、ルート上でどこまで行けるかという一点だけを知ることができる。また、運転支援システム1によれば、他の車両の走行結果を使って運転傾向を推定することにより、初めて走行するルートでも、そのルート上における走行可能範囲情報を判断できる。
【0046】
また、運転支援システム1によれば、ルート上のリンク単位の電力消費量の変化に基づいて運転傾向を分析し、その運転傾向から電力消費量の走行計画を立てることにより、勾配情報、風、天気、気温、車両特性等の詳細な計算を行わなくてもルート上における走行可能範囲を判断することができる。例えば、異なる車種の車両で同じルートを各運転者が同じような運転操作特性で走行した場合でも、車両特性が異なる車両であれば、電力消費量の変化が異なり、異なる運転傾向のグループとして分類されることになる。したがって、車両特性を考慮しないでグループ分けしても、車両特性が異なる運転傾向のグループに分けられることになる。また、運転支援システム1によれば、電力消費量の変化の仕方によって運転者の運転方法を間接的に特徴付けて運転者の運転傾向をグループ分けして学習することにより、定式として計算が困難な電力消費量を正確に計算することなく、運転者の運転傾向を推定でき、ルート上でどこまで到達できるかを正確に判断できる。
【0047】
また、運転支援システム1によれば、運転支援対象の車両がルートの目的地に到達するまで定期的にその車両(運転者)の運転傾向を分析するので、運転支援対象の車両のルート上の現在位置が進み、リンク単位の電力消費量の変化情報が増えるほど、高精度な分析ができ、車両(運転者)により合った運転傾向を推定でき、より正確な走行可能範囲を判断できる。さらに、運転支援システム1によれば、運転支援対象の車両がルートの目的地に到達するまで定期的にその車両(運転者)の運転傾向を分析するので、ルートの途中で運転者が変わったりあるいは運転者の体調が変化したりして運転傾向が著しく変化しても、その変化した運転傾向に類似する運転傾向を推定でき、変化した後も正確な走行可能範囲を判断できる。
【0048】
また、運転支援システム1によれば、高速道路や有料道路等の特定のポイント(インターチェンジ、サービスエリア、パーキングエリア)以外でルートの途中で外れることが不能な道路上にルートが設定された場合、ルートが変動する可能性がある一般道路よりも、高精度に運転傾向を分析でき、より正確な走行可能範囲を判断することができる。
【0049】
図2を参照して、第2の実施の形態に係る運転支援システム2について説明する。図2は、第2の実施の形態に係る運転支援システムの構成図である。
【0050】
運転支援システム2は、第1の実施の形態に係る運転支援システム1と比較すると、センタ4で運転支援対象の車両(運転者)の運転傾向を推定すると、その運転傾向に基づく運転アドバイス情報を運転者に提供する点が異なる。第2の実施の形態では、この点を詳細に説明する。
【0051】
ナビゲーション装置5は、第1の実施の形態に係るナビゲーション装置3と比較すると、センタ4からの運転アドバイス情報を受信すると、その運転アドバイス情報を表示する点だけが異なる。ナビゲーション装置5は、通信端末10、目的地入力部11、現在位置検出部12、経路生成部13、電力量検出部14、電力量送信部15、運転アドバイス受信部18、表示部17を備えている。なお、通信端末10、目的地入力部11、現在位置検出部12、経路生成部13、電力量検出部14、電力量送信部15は、第1の実施の形態に係るナビゲーション装置3に備えられるものと同様のものなので、説明を省略する。
【0052】
運転アドバイス受信部18は、通信端末10を介して運転アドバイス情報を受信し、運転アドバイス情報を表示部17に出力する。表示部17では、運転アドバイス受信部18から運転アドバイス情報を入力すると、その運転アドバイス情報を表示する。例えば、アドバイスをテキストで示したり、電力消費量の変化のグラフで示す。
【0053】
センタ6は、第1の実施の形態に係るセンタ4と比較すると、運転支援対象の車両の運転特性を推定すると、その推定した運転傾向よりも有利な運転傾向(例えば、より電力消費量の少ない運転傾向、より短時間で到達できる運転傾向)になるための運転のアドバイス情報や推定した運転傾向に沿った現状維持のための運転のアドバイス等を生成し、その運転アドバイス情報を運転支援対象の車両に送信する。
【0054】
センタ6は、通信端末20、電力プローブ受信部21、プローブ情報記憶部22、運転傾向分析部23、運転アドバイス送信部25を備えている。通信端末20、電力プローブ受信部21、プローブ情報記憶部22、運転傾向分析部23は、第1の実施の形態に係るセンタ4に備えられるものと同様のものなるので、説明を省略する。
【0055】
運転アドバイス送信部25は、運転傾向分析部23で分析した運転支援対象の車両(運転者)の運転傾向よりも有利な運転傾向になるための運転のアドバイスや運転傾向に沿った現状維持の運転のアドバイス等を生成し、運転アドバイスの情報を通信端末20を介して該当する車両に送信する。
【0056】
具体的には、運転アドバイス送信部25では、運転支援対象の車両(運転者)の現在の運転傾向グループよりも有利な運転傾向グループの中から最も差の少ない運転傾向グループ(1段階有利な運転傾向グループ)を選択する。そして、運転アドバイス送信部25では、現在の運転傾向グループと選択した運転傾向グループとの差を生じさせている運転方法を抽出して運転のアドバイスや注意点を生成する。例えば、電力消費量を抑えるために速度を下げるためのアクセル開度やアクセルのON/OFFタイミングのアドバイス、走行時間を短くするために速度を上げるためのアクセル開度やアクセルのON/OFFタイミングのアドバイス、電力消費量の変動を抑えるために一定速度で走行するための注意がある。
【0057】
より有利な運転傾向としては、高速道路等のように充電可能なポイント(サービスエリア、パーキングエリア等)が固定され、ルートを外れることが困難な場合には到達可能な充電ポイントに到達したときのバッテリの電力量がより多くなる(電力消費量が少なくなる)ような運転傾向あるいは到達可能な充電ポイントまでより短時間で到達できるような運転傾向があり、一般道路等のように運転者によってルートが変動する可能性がある場合にはより遠くに行くことができる(電力消費量が少なくなる)ような運転傾向である。
【0058】
より短時間で到達できる運転傾向の場合、例えば、高速道路においてルート途中の特定の充電ポイントで充電しなければならないと判定された場合、時速80km固定で走行するよりも、時速100km固定で走行し、充電ポイントまでの走行時間を短くする。これによって、短縮される走行時間の方が車速アップで電力消費量が増えることによって延びる充電時間よりも大きければ、ルート全体としてのトリップ時間が短くなるので、有利な運転となる。なお、車速をアップしたことで電力消費量が増加するが、到達可能地点の判定では最終的に残る電力量に余裕を持たせて判定しているので、電力消費量が多少増加しても、判定された充電可能ポイントに十分に到達可能である。ちなみに、時間に関する運転アドバイスの場合、車両から各リンクの旅行時間情報をセンタ4に提供し、リンクの旅行時間情報を加味して運転傾向の分析や運転アドバイスの生成を行う。
【0059】
また、運転アドバイス送信部25では、運転支援対象の車両(運転者)の現在の運転傾向グループのルート全体での電力消費量の走行計画をグラフ化(グラフは線ではなく、電力消費量にある程度幅を持たせた帯状とする)するとともに、運転支援対象の車両がルートを走行開始から現在までの電力消費量の変化をグラフ化し、この2つのグラフを重畳したものを生成する。そして、運転アドバイス送信部25では、現在の運転傾向グループの電量消費量の帯状グラフの範囲内に運転支援対象の車両の電力消費量の線グラフが入っている場合には、走行計画通りに運転できていることを示す現状維持のアドバイスを生成する。例えば、現状の車速(アクセル開度)を維持するアドバイスがある。運転アドバイス送信部25では、運転アドバイス情報以外に、上記のようなグラフも車両に送信するようにしてもよい。運転者は、このようなグラフを見ることによって、現状の電力消費量を的確に把握できる。なお、現在の運転傾向グループの電量消費量の帯状グラフの範囲内に運転支援対象の車両の電力消費量の線グラフが入らない場合、現状の運転傾向グループから外れているので、運転支援対象の車両(運転者)の運転傾向グループが現在の運転傾向グループから他の運転傾向グループに更新されることになる。
【0060】
なお、運転傾向をより詳細に分析し、運転アドバイスをより的確なものとするために、車両からアクセル開度、車速、エアコンやライト等の装置のON/OFF情報等の情報をセンタ4に提供し、これらの情報も加味して運転傾向の分析や運転アドバイスの生成をすることが望ましい。
【0061】
ちなみに、運転アドバイスとしては、以下のようなアドバイスを行ってもよい。ルート上の各区間からチャンピオンデータを抽出する。チャンピンデータとしては、例えば、グループの中で最も電力消費量の少ないデータ、最も短時間で走行するデータがある。そして、その各区間のチャンピオンデータを繋ぎ合わせて最も理想的なデータとし、そのデータから運転方法を認識し、その運転方法に基づいて運転アドバイスを生成する。
【0062】
図2を参照して、運転支援システム2における動作について説明する。運転支援システム2における動作では、センタ6で運転傾向を分析するまでの動作は第1の実施の形態に係る運転支援システム1における動作と同様の動作なので、それ以降の動作について説明する。
【0063】
あるルートを走行中の運転支援対象の車両からプローブ情報を受信する毎に(リンク走行毎でもよい)、センタ6では、運転支援対象の車両(運転者)の運転傾向のグループを分析すると、分類した全ての運転傾向グループの中から現状の運転傾向グループよりも有利な運転傾向グループを選択し、現状の運転傾向グループとより有利な運転傾向グループとの差に基づいて運転アドバイスを生成する。そして、センタ6では、その運転アドバイス情報を運転支援対象の車両に送信する。
【0064】
運転支援対象の車両のナビゲーション装置5では、その運転アドバイス情報を受信し、その運転アドバイス情報を表示する。運転者はこの情報を見てアドバイスの運転操作を行うことによって、電力消費量を抑えてより遠くまで行けたり、あるいは、到達可能な充電ポイントまでより短時間で到達できる。その結果、より少ない充電回数や充電時間となったり、あるいは、ルート全体でのトリップ時間を短縮できる。なお、より有利な運転アドバイスではなく、計画通りに電力消費がされているかの運転アドバイスの場合もある。
【0065】
センタ6及び運転支援対象の車両のナビゲーション装置5では、ルートの目的地に到達するまで上記の処理を繰り返し行う。この繰り返し行われる処理によって、運転支援対象の車両(運転者)の運転傾向として分析されたグループが、途中で異なるグループに遷移する場合がある。その結果、運転アドバイスも変化する場合がある。
【0066】
この運転支援システム2によれば、第1の実施の形態に係る運転支援システム1と同様に運転支援対象の車両(運転者)の運転傾向を分析して、その運転傾向を考慮して運転支援を行うので、運転支援システム1と同様の効果を有する。特に、運転支援システム2によれば、運転支援として運転アドバイス情報を提供することにより、より有利な運転に変えることができたりあるいは計画通りに電力が消費できているかを確認できる。また、運転支援システム2によれば、ルート全体の電力消費量の計画に基づいてアドバイスを生成することにより、瞬間瞬間の運転方法のアドバイスではなく、ルート全体に対して現在の運転という形で俯瞰してアドバイスを捉えることができる。また、運転支援システム2によれば、勾配情報、風、天気、気温、車両特性等の詳細な計算を行わなくてもルート上における電力消費計画を把握でき、その電力消費計画から的確な運転アドバイスを生成することができる。
【0067】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0068】
例えば、本実施の形態ではセンタで車両からプローブ情報を収集し、センタで運転傾向の分析等を行うセンタと車両(ナビゲーション装置)からなる運転支援システムに適用したが、他の構成でもよく、例えば、車載機で情報を収集し、車載機で運転傾向の分析等を行う構成でもよい。また、本実施の形態では電気自動車に適用したが、駆動源としてモータ以外にエンジンを有するハイブリッドカーにも適用可能である。
【0069】
また、第1の実施の形態では走行可能範囲情報を提供し、第2の実施の形態では運転アドバイス情報を提供したが、センタで各車両の運転者の運転傾向から走行可能範囲情報を判断するとともに運転アドバイス情報を生成し、車両で両方の情報を提供する構成としてもよい。また、各車両の運転傾向から他の運転支援情報を生成し、他の運転支援情報を提供してもよい。
【0070】
また、本実施の形態では運転支援の情報を表示することによって提供する構成としたが、音声出力等の他の手段で情報提供してもよいし、あるいは、情報提供以外の運転支援を行ってもよい。
【0071】
また、本実施の形態では車両において運転者によって目的地が入力され、その目的地までの経路(ルート)を生成した場合に電力量の変化情報を含むプローブ情報をセンタに送信する構成としたが、走行中、常時、電力量の変化情報を含むプローブ情報をセンタに送信してもよい。
【0072】
また、本実施の形態では目的地入力部で運転者が目的地を明示的に入力した場合としたが、装置側で自動的に目的地相当の情報を設定することも可能であるなら、その目的地を利用してもよい。
【0073】
また、本実施の形態では運転支援対象の車両がルートの目的地に到達するまで定期的にその車両(運転者)の運転傾向を分析し、運転支援情報を生成する構成としたが、運転支援対象の車両がルートの所定区間(例えば、1/2程度、1/3程度)まで走行した時点で運転傾向の分析や運転支援情報の生成を終了してもよいし、あるいは、運転者からの要求があるときだけ運転傾向の分析や運転支援情報の生成を行ってもよい。
【0074】
また、センタで多数の車両から各走行ルートについての電力量の変化情報を含むプローブ情報を収集するとともに、運転支援対象の車両の電力量の変化情報に基づいてその車両の運転者の運転特性を推定し、運転支援対象の車両が任意の走行ルートを走行する場合、その推定した運転支援対象の車両の運転者の運転特性に任意の走行ルートについての様々な車両から収集された電力量の変化情報を用いて運転支援対象の車両の運転者の運転特性を修正し、その修正した運転特性に基づいて運転支援対象の車両を運転支援(例えば、走行ルート上で到達可能地点情報の情供、走行ルート上での省エネルギ走行情報を提供)するようにしてもよい。
【符号の説明】
【0075】
1、2…運転支援システム、3,5…ナビゲーション装置、4,6…センタ、10…通信端末、11…目的地入力部、12…現在位置検出部、13…経路生成部、14…電力量検出部、15…電力量送信部、16…走行可能範囲受信部、17…表示部、18…運転アドバイス受信部、20…通信端末、21…電力プローブ受信部、22…プローブ情報記憶部、23…運転傾向分析部、24…走行可能範囲送信部、25…運転アドバイス送信部。
【特許請求の範囲】
【請求項1】
駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、
任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、
運転支援対象の車両が走行する任意の走行ルートについて前記収集手段で収集した電力量の変化情報に基づいて複数の運転特性に分類し、該分類した複数の運転特性の中から前記運転支援対象の車両の運転特性を推定する運転特性推定手段と、
を備え、
前記運転特性推定手段で推定した運転特性に基づいて前記運転支援対象の車両を運転支援することを特徴とする運転支援装置。
【請求項2】
前記運転特性推定手段で推定した運転特性に基づいて前記運転支援対象の車両における現在の電力量で前記任意の走行ルート上での到達可能地点を予測し、該到達可能地点を前記運転支援対象の車両で提供することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記運転特性推定手段で推定した運転特性に基づいて前記任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を前記運転支援対象の車両で提供することを特徴とする請求項1に記載の運転支援装置。
【請求項4】
駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、
任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、
運転支援対象の車両の電力量の変化情報に基づいて運転者の運転特性を推定する運転特性推定手段と、
を備え、
前記運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と前記収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて前記運転支援対象の車両を運転支援することを特徴とする運転支援装置。
【請求項5】
前記運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と前記収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて前記運転支援対象の車両における現在の電力量で前記任意の走行ルート上での到達可能地点を予測し、該到達可能地点を前記運転支援対象の車両で提供することを特徴とする請求項4に記載の運転支援装置。
【請求項6】
前記運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と前記収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて前記任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を前記運転支援対象の車両で提供することを特徴とする請求項4に記載の運転支援装置。
【請求項1】
駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、
任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、
運転支援対象の車両が走行する任意の走行ルートについて前記収集手段で収集した電力量の変化情報に基づいて複数の運転特性に分類し、該分類した複数の運転特性の中から前記運転支援対象の車両の運転特性を推定する運転特性推定手段と、
を備え、
前記運転特性推定手段で推定した運転特性に基づいて前記運転支援対象の車両を運転支援することを特徴とする運転支援装置。
【請求項2】
前記運転特性推定手段で推定した運転特性に基づいて前記運転支援対象の車両における現在の電力量で前記任意の走行ルート上での到達可能地点を予測し、該到達可能地点を前記運転支援対象の車両で提供することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記運転特性推定手段で推定した運転特性に基づいて前記任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を前記運転支援対象の車両で提供することを特徴とする請求項1に記載の運転支援装置。
【請求項4】
駆動源としてモータを有する車両に対して運転支援する運転支援装置であって、
任意の車両から各走行ルートについての電力量の変化情報を収集する収集手段と、
運転支援対象の車両の電力量の変化情報に基づいて運転者の運転特性を推定する運転特性推定手段と、
を備え、
前記運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と前記収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて前記運転支援対象の車両を運転支援することを特徴とする運転支援装置。
【請求項5】
前記運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と前記収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて前記運転支援対象の車両における現在の電力量で前記任意の走行ルート上での到達可能地点を予測し、該到達可能地点を前記運転支援対象の車両で提供することを特徴とする請求項4に記載の運転支援装置。
【請求項6】
前記運転特性推定手段で推定した運転支援対象の車両の運転者の運転特性と前記収集手段で収集した任意の走行ルートについての電力量の変化情報に基づいて前記任意の走行ルート上での省エネルギ運転情報を取得し、該省エネルギ運転情報を前記運転支援対象の車両で提供することを特徴とする請求項4に記載の運転支援装置。
【図1】


【図2】
【図2】
【公開番号】特開2013−45250(P2013−45250A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181897(P2011−181897)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]