
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は運転支援装置に係り、特に、車両を道路の側縁に寄せる際に車輪が縁石と接触したり側溝へ脱輪することを抑制する運転支援装置に関する。
【背景技術】
【0002】
狭い道路での対向車とのすれ違い等で、車両を道路の側縁に寄せる際に、運転者は車輪が路面上の縁石に接触したり、側溝に脱輪したりしないように、サイドミラーの下部もしくはフェンダ上に取り付けられた補助ミラーを目視で確認していた。
このような状況での運転を支援する技術には、車両に取り付けたカメラによる映像から路面上の縁石や側溝を検出し、車室内のモニタに映像として表示し、車輪が縁石や側溝に接近した場合にブザー等で警報を発する運転支援装置がある。
【0003】
従来の運転支援装置としては、特開2007−142765号、特開2006−303858号、特開2007−18037号において、縁石や側溝の検出手法と検出した縁石や側溝と車輪との距離の算出方法及びそれらに対する音声や警告音による警報により、縁石への車輪の接触や側溝への脱輪を抑制する技術が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−142765号
【特許文献2】特開2006−303858号
【特許文献3】特開2007−18037号
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、目視での確認では、縁石や側溝と車輪との距離を見誤るおそれがある。また、従来の運転支援装置では、音声や警告音による警報を聞き逃した場合に、結果としては車輪の縁石への接触もしくは側溝への脱輪が発生してしまい、これを防ぐ技術としては不十分な面があった。
【0006】
この発明は、車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制することを目的とする。
【課題を解決するための手段】
【0007】
この発明は、車両側方の路面と車輪とを撮像する撮像手段と、前記撮像手段により撮像された画像から路面上の縁石または側溝を検出する障害物検出手段と、前記撮像手段により撮像された画像上で前記障害物検出手段により検出された縁石または側溝と車輪との距離を算出する距離算出手段とを備えた運転支援装置において、車輪速を検出する車輪速検出手段と、操舵角を検出する操舵角検出手段と、操舵反力を制御する操舵制御手段と、前記車輪速検出手段により検出された車輪速と前記操舵角検出手段により検出された操舵角とから車輪の進路を予測する進路予測手段と、前記障害物検出手段により縁石または側溝が検出された場合、前記進路予測手段により予測された車輪の進路と前記距離算出手段により算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段と、前記判定手段により車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には前記操舵制御手段により操舵反力を大きくする制御装置むとを備えることを特徴とする。
【発明の効果】
【0008】
この発明は、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくするため、運転者への警告として確実に伝えることができ、ステアリング操作する運転者に縁石への接触や側溝への脱輪の警告を直接的に伝えることができ、車輪の縁石への接触や側溝への脱輪を効果的に抑制することができる。
【図面の簡単な説明】
【0009】
【図1】図1は運転支援装置のシステム構成図である。(実施例)
【図2】図2は車輪が縁石や側溝に近づいた場合の説明図である。(実施例)
【図3】図3は運転支援装置の制御フローチャートである。(実施例)
【発明を実施するための形態】
【0010】
以下、図面に基づいて、この発明の実施例を説明する。
【実施例】
【0011】
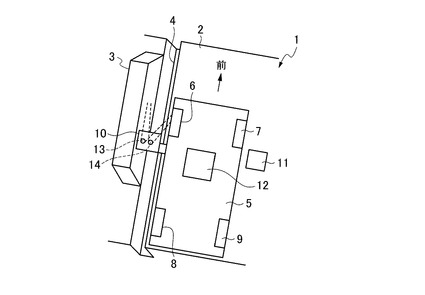
図1〜図3は、この発明の実施例を示すものである。図2において、1は道路、2は路面、3は縁石、4は側溝である。道路1の路面2を走行する車両5は、左前車輪6、右前車輪7、左後車輪8、右後車輪9を有し、左側前部に左サイドミラー10を備え、右側前部に右サイドミラー11を備えている。車両5は、左前車輪6あるいは右前車輪7が、路面2上の縁石3への接触もしくは側溝4への脱輪の発生するおそれがある場合に警告する運転支援装置12を搭載している。この実施例の運転支援装置12は、左前車輪6が、路面2上の縁石3への接触もしくは側溝4への脱輪の発生するおそれがある場合に警告するものとして説明する。
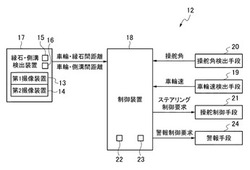
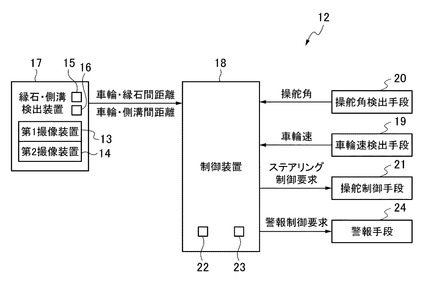
前記運転支援装置12は、図1に示すように、車両側方の路面2と左前車輪6とを撮像する撮像手段として、第1撮像装置13及び第2撮像装置14を備えている。第1撮像装置13及び第2撮像装置14は、ステレオカメラであり、図2に示すように、左サイドミラー10に設けられている。運転支援装置12は、障害物検出手段15と、距離算出手段16とを備えている。障害物検出手段15は、第1撮像装置13及び第2撮像装置14により撮像された2つの画像から、路面2上の縁石3または側溝4を検出する。距離算出手段16は、第1撮像装置13及び第2撮像装置14により撮像された2つの画像上で、前記障害物検出手段15により検出された縁石2または側溝3と左前車輪6との距離を算出する。
第1撮像装置13及び第2撮像装置14と、障害物検出手段15と、距離算出手段16とは、縁石・側縁検出装置17を構成する。縁石・側縁検出装置17は、算出した縁石2と左前車輪6との距離、また、側溝3と左前車輪6との距離を制御装置18に出力する。
前記運転支援装置12は、各車輪6〜9の車輪速を検出する車輪速検出手段19と、ステアリングの操舵角を検出する操舵角検出手段20と、運転者のステアリング操作を助勢するためにステアリングの操舵反力を制御する操舵制御手段21とを備えている。車輪速検出手段19と操舵角検出手段20とは、車輪速と操舵角とを制御装置18に出力する。制御装置18は、ステアリング制御要求を操舵制御手段21に出力し、操舵制御手段21によりステアリングの操舵反力を制御する。
前記制御装置18は、進路予測手段22と、判定手段23とを備えている。進路予測手段22は、前記車輪速検出手段19により検出された車輪速と前記操舵角検出手段20により検出された操舵角とから、左前車輪6の進路を予測する。判定手段23は、前記障害物検出手段15により縁石3または側溝4が検出された場合、前記進路予測手段22により予測された左前車輪6の進路と前記距離算出手段16により算出された縁石3または側溝4と左前車輪6との距離とに基づいて、左前車輪6が縁石3または側溝4に予め設定された時間内に到達するかどうかを判定する。制御装置18は、前記判定手段23により左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時には、前記操舵制御手段21にステアリング制御要求を出力し、操舵制御手段21により操舵反力を大きくする。
また、運転支援装置12は、運転者に警告する警報手段24を備えている。制御装置18は、前記判定手段23により左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時には、警報制御要求を前記警報手段24に出し、警報手段24により運転者に音声、表示等で警告する。
【0012】
次に、運転支援装置12の作用を説明する。
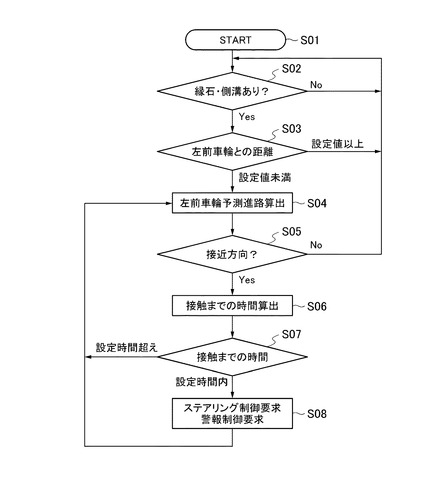
運転支援装置12は、狭い道路1での対向車とのすれ違い等で、車両5を道路1の側縁に寄せる際に、制御がスタートすると(S01)、路面2上に縁石3や側溝4があるかを判断する(S02)。
この判断(S02)がNOの場合は、この判断(S02)を繰り返す。この判断(S02)がYESの場合は、縁石2または側溝3と左前車輪6との距離が設定値未満であるか設定値以上であるかを判断する(S03)。
この判断(S03)が設定値以上の場合は、前記判断(S02)に戻る。この判断(S03)が設定値未満の場合は、左前車輪6の予測進路を算出し(S04)、左前車輪6の予測進路が縁石2または側溝3に接近する方向であるかを判断する(S05)。
この判断(S05)がNOの場合は、前記判断(S02)に戻る。この判断(S05)がYESの場合は、左前車輪6が縁石3または側溝4に到達して接触するまでの時間を算出し(S06)、左前車輪6が縁石3または側溝4に到達して接触するまでの時間が設定時間内であるか設定時間超えであるかを判断する(S07)。
この判断(S07)が設定時間超えの場合は、進路の算出(S04)に戻る。この判断(S07)が設定時間内の場合は、ステアリング制御要求によりステアリングの操舵反力を大きくし、また、警報制御要求により音声や表示等で警告し(S08)、進路の算出(S04)に戻る。
【0013】
このように、運転支援装置12は、左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時にはステアリングの操舵反力を大きくするため、ステアリング操作する運転者に縁石3への接触や側溝4への脱輪の警告を直接的に伝えることができ、左前車輪6の縁石3への接触や側溝4への脱輪を効果的に抑制することができる。
また、この運転支援装置12は、左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時には警報手段24により運転者に音声、表示等で警告するため、左前車輪6の縁石3への接触や側溝4への脱輪を効果的に抑制することができる。
さらに、この運転支援装置12は、撮像手段が第1撮像装置13及び第2撮像装置14からなるステレオカメラであるため、同時に2つの画像を撮像し、撮像した2つの画像の視差から立体的に物体を検出することができる。したがって、運転支援装置12は、高さのある縁石3や深さのある側溝4を、精度良く検出することができる。
また、この運転支援装置12は、左サイドミラー10に第1撮像装置13及び第2撮像装置14からなるステレオカメラが備えられているため、車両側方の路面2と左前車輪6とを1つの画像に撮像することができ、縁石3や側溝4と左前車輪6との距離を精度良く算出することができる。
なお、上述実施例においては、左前車輪6の接触、脱輪の場合について述べたが、一方通行の場合等、右前車輪7の接触、脱輪の場合にも適用可能である。また、上述実施例においては、左前車輪6の進路の予測にステアリングの操舵角を用いたが、左前車輪6の操舵角を用いることもできる。したがって、右前車輪7の接触、脱輪の警告に適用する場合においては、右前車輪7の進路の予測にステアリングの操舵角を用いるだけでなく、右前車輪7の操舵角を用いることもできる。
【産業上の利用可能性】
【0014】
この発明は、車輪の縁石への接触もしくは側溝への脱輪の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制することができるものであり、四輪車にかぎらず二輪車にも適用することができる。
【符号の説明】
【0015】
1 道路
2 路面
3 縁石
4 側溝
5 車両
6 左前車輪
10 左サイドミラー
12 運転支援装置
13 第1撮像装置
14 第2撮像装置
15 障害物検出手段
16 距離算出手段
17 縁石・側縁検出装置
18 制御装置
19 車輪速検出手段
20 操舵角検出手段
21 操舵制御手段
22 進路予測手段
23 判定手段
24 警報手段
【技術分野】
【0001】
この発明は運転支援装置に係り、特に、車両を道路の側縁に寄せる際に車輪が縁石と接触したり側溝へ脱輪することを抑制する運転支援装置に関する。
【背景技術】
【0002】
狭い道路での対向車とのすれ違い等で、車両を道路の側縁に寄せる際に、運転者は車輪が路面上の縁石に接触したり、側溝に脱輪したりしないように、サイドミラーの下部もしくはフェンダ上に取り付けられた補助ミラーを目視で確認していた。
このような状況での運転を支援する技術には、車両に取り付けたカメラによる映像から路面上の縁石や側溝を検出し、車室内のモニタに映像として表示し、車輪が縁石や側溝に接近した場合にブザー等で警報を発する運転支援装置がある。
【0003】
従来の運転支援装置としては、特開2007−142765号、特開2006−303858号、特開2007−18037号において、縁石や側溝の検出手法と検出した縁石や側溝と車輪との距離の算出方法及びそれらに対する音声や警告音による警報により、縁石への車輪の接触や側溝への脱輪を抑制する技術が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−142765号
【特許文献2】特開2006−303858号
【特許文献3】特開2007−18037号
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、目視での確認では、縁石や側溝と車輪との距離を見誤るおそれがある。また、従来の運転支援装置では、音声や警告音による警報を聞き逃した場合に、結果としては車輪の縁石への接触もしくは側溝への脱輪が発生してしまい、これを防ぐ技術としては不十分な面があった。
【0006】
この発明は、車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制することを目的とする。
【課題を解決するための手段】
【0007】
この発明は、車両側方の路面と車輪とを撮像する撮像手段と、前記撮像手段により撮像された画像から路面上の縁石または側溝を検出する障害物検出手段と、前記撮像手段により撮像された画像上で前記障害物検出手段により検出された縁石または側溝と車輪との距離を算出する距離算出手段とを備えた運転支援装置において、車輪速を検出する車輪速検出手段と、操舵角を検出する操舵角検出手段と、操舵反力を制御する操舵制御手段と、前記車輪速検出手段により検出された車輪速と前記操舵角検出手段により検出された操舵角とから車輪の進路を予測する進路予測手段と、前記障害物検出手段により縁石または側溝が検出された場合、前記進路予測手段により予測された車輪の進路と前記距離算出手段により算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段と、前記判定手段により車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には前記操舵制御手段により操舵反力を大きくする制御装置むとを備えることを特徴とする。
【発明の効果】
【0008】
この発明は、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくするため、運転者への警告として確実に伝えることができ、ステアリング操作する運転者に縁石への接触や側溝への脱輪の警告を直接的に伝えることができ、車輪の縁石への接触や側溝への脱輪を効果的に抑制することができる。
【図面の簡単な説明】
【0009】
【図1】図1は運転支援装置のシステム構成図である。(実施例)
【図2】図2は車輪が縁石や側溝に近づいた場合の説明図である。(実施例)
【図3】図3は運転支援装置の制御フローチャートである。(実施例)
【発明を実施するための形態】
【0010】
以下、図面に基づいて、この発明の実施例を説明する。
【実施例】
【0011】
図1〜図3は、この発明の実施例を示すものである。図2において、1は道路、2は路面、3は縁石、4は側溝である。道路1の路面2を走行する車両5は、左前車輪6、右前車輪7、左後車輪8、右後車輪9を有し、左側前部に左サイドミラー10を備え、右側前部に右サイドミラー11を備えている。車両5は、左前車輪6あるいは右前車輪7が、路面2上の縁石3への接触もしくは側溝4への脱輪の発生するおそれがある場合に警告する運転支援装置12を搭載している。この実施例の運転支援装置12は、左前車輪6が、路面2上の縁石3への接触もしくは側溝4への脱輪の発生するおそれがある場合に警告するものとして説明する。
前記運転支援装置12は、図1に示すように、車両側方の路面2と左前車輪6とを撮像する撮像手段として、第1撮像装置13及び第2撮像装置14を備えている。第1撮像装置13及び第2撮像装置14は、ステレオカメラであり、図2に示すように、左サイドミラー10に設けられている。運転支援装置12は、障害物検出手段15と、距離算出手段16とを備えている。障害物検出手段15は、第1撮像装置13及び第2撮像装置14により撮像された2つの画像から、路面2上の縁石3または側溝4を検出する。距離算出手段16は、第1撮像装置13及び第2撮像装置14により撮像された2つの画像上で、前記障害物検出手段15により検出された縁石2または側溝3と左前車輪6との距離を算出する。
第1撮像装置13及び第2撮像装置14と、障害物検出手段15と、距離算出手段16とは、縁石・側縁検出装置17を構成する。縁石・側縁検出装置17は、算出した縁石2と左前車輪6との距離、また、側溝3と左前車輪6との距離を制御装置18に出力する。
前記運転支援装置12は、各車輪6〜9の車輪速を検出する車輪速検出手段19と、ステアリングの操舵角を検出する操舵角検出手段20と、運転者のステアリング操作を助勢するためにステアリングの操舵反力を制御する操舵制御手段21とを備えている。車輪速検出手段19と操舵角検出手段20とは、車輪速と操舵角とを制御装置18に出力する。制御装置18は、ステアリング制御要求を操舵制御手段21に出力し、操舵制御手段21によりステアリングの操舵反力を制御する。
前記制御装置18は、進路予測手段22と、判定手段23とを備えている。進路予測手段22は、前記車輪速検出手段19により検出された車輪速と前記操舵角検出手段20により検出された操舵角とから、左前車輪6の進路を予測する。判定手段23は、前記障害物検出手段15により縁石3または側溝4が検出された場合、前記進路予測手段22により予測された左前車輪6の進路と前記距離算出手段16により算出された縁石3または側溝4と左前車輪6との距離とに基づいて、左前車輪6が縁石3または側溝4に予め設定された時間内に到達するかどうかを判定する。制御装置18は、前記判定手段23により左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時には、前記操舵制御手段21にステアリング制御要求を出力し、操舵制御手段21により操舵反力を大きくする。
また、運転支援装置12は、運転者に警告する警報手段24を備えている。制御装置18は、前記判定手段23により左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時には、警報制御要求を前記警報手段24に出し、警報手段24により運転者に音声、表示等で警告する。
【0012】
次に、運転支援装置12の作用を説明する。
運転支援装置12は、狭い道路1での対向車とのすれ違い等で、車両5を道路1の側縁に寄せる際に、制御がスタートすると(S01)、路面2上に縁石3や側溝4があるかを判断する(S02)。
この判断(S02)がNOの場合は、この判断(S02)を繰り返す。この判断(S02)がYESの場合は、縁石2または側溝3と左前車輪6との距離が設定値未満であるか設定値以上であるかを判断する(S03)。
この判断(S03)が設定値以上の場合は、前記判断(S02)に戻る。この判断(S03)が設定値未満の場合は、左前車輪6の予測進路を算出し(S04)、左前車輪6の予測進路が縁石2または側溝3に接近する方向であるかを判断する(S05)。
この判断(S05)がNOの場合は、前記判断(S02)に戻る。この判断(S05)がYESの場合は、左前車輪6が縁石3または側溝4に到達して接触するまでの時間を算出し(S06)、左前車輪6が縁石3または側溝4に到達して接触するまでの時間が設定時間内であるか設定時間超えであるかを判断する(S07)。
この判断(S07)が設定時間超えの場合は、進路の算出(S04)に戻る。この判断(S07)が設定時間内の場合は、ステアリング制御要求によりステアリングの操舵反力を大きくし、また、警報制御要求により音声や表示等で警告し(S08)、進路の算出(S04)に戻る。
【0013】
このように、運転支援装置12は、左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時にはステアリングの操舵反力を大きくするため、ステアリング操作する運転者に縁石3への接触や側溝4への脱輪の警告を直接的に伝えることができ、左前車輪6の縁石3への接触や側溝4への脱輪を効果的に抑制することができる。
また、この運転支援装置12は、左前車輪6が縁石3または側溝4に予め設定された時間内に到達すると判定された時には警報手段24により運転者に音声、表示等で警告するため、左前車輪6の縁石3への接触や側溝4への脱輪を効果的に抑制することができる。
さらに、この運転支援装置12は、撮像手段が第1撮像装置13及び第2撮像装置14からなるステレオカメラであるため、同時に2つの画像を撮像し、撮像した2つの画像の視差から立体的に物体を検出することができる。したがって、運転支援装置12は、高さのある縁石3や深さのある側溝4を、精度良く検出することができる。
また、この運転支援装置12は、左サイドミラー10に第1撮像装置13及び第2撮像装置14からなるステレオカメラが備えられているため、車両側方の路面2と左前車輪6とを1つの画像に撮像することができ、縁石3や側溝4と左前車輪6との距離を精度良く算出することができる。
なお、上述実施例においては、左前車輪6の接触、脱輪の場合について述べたが、一方通行の場合等、右前車輪7の接触、脱輪の場合にも適用可能である。また、上述実施例においては、左前車輪6の進路の予測にステアリングの操舵角を用いたが、左前車輪6の操舵角を用いることもできる。したがって、右前車輪7の接触、脱輪の警告に適用する場合においては、右前車輪7の進路の予測にステアリングの操舵角を用いるだけでなく、右前車輪7の操舵角を用いることもできる。
【産業上の利用可能性】
【0014】
この発明は、車輪の縁石への接触もしくは側溝への脱輪の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制することができるものであり、四輪車にかぎらず二輪車にも適用することができる。
【符号の説明】
【0015】
1 道路
2 路面
3 縁石
4 側溝
5 車両
6 左前車輪
10 左サイドミラー
12 運転支援装置
13 第1撮像装置
14 第2撮像装置
15 障害物検出手段
16 距離算出手段
17 縁石・側縁検出装置
18 制御装置
19 車輪速検出手段
20 操舵角検出手段
21 操舵制御手段
22 進路予測手段
23 判定手段
24 警報手段
【特許請求の範囲】
【請求項1】
車両側方の路面と車輪とを撮像する撮像手段と、前記撮像手段により撮像された画像から路面上の縁石または側溝を検出する障害物検出手段と、前記撮像手段により撮像された画像上で前記障害物検出手段により検出された縁石または側溝と車輪との距離を算出する距離算出手段とを備えた運転支援装置において、車輪速を検出する車輪速検出手段と、操舵角を検出する操舵角検出手段と、操舵反力を制御する操舵制御手段と、前記車輪速検出手段により検出された車輪速と前記操舵角検出手段により検出された操舵角とから車輪の進路を予測する進路予測手段と、前記障害物検出手段により縁石または側溝が検出された場合、前記進路予測手段により予測された車輪の進路と前記距離算出手段により算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段と、前記判定手段により車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には前記操舵制御手段により操舵反力を大きくする制御装置とを備えることを特徴とする運転支援装置。
【請求項2】
運転者に警告する警報手段を備え、前記判定手段により車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には前記警報手段により運転者に警告することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記撮像手段は、サイドミラーに設けられたステレオカメラであることを特徴とする請求項1又は請求項2に記載の運転支援装置。
【請求項1】
車両側方の路面と車輪とを撮像する撮像手段と、前記撮像手段により撮像された画像から路面上の縁石または側溝を検出する障害物検出手段と、前記撮像手段により撮像された画像上で前記障害物検出手段により検出された縁石または側溝と車輪との距離を算出する距離算出手段とを備えた運転支援装置において、車輪速を検出する車輪速検出手段と、操舵角を検出する操舵角検出手段と、操舵反力を制御する操舵制御手段と、前記車輪速検出手段により検出された車輪速と前記操舵角検出手段により検出された操舵角とから車輪の進路を予測する進路予測手段と、前記障害物検出手段により縁石または側溝が検出された場合、前記進路予測手段により予測された車輪の進路と前記距離算出手段により算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段と、前記判定手段により車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には前記操舵制御手段により操舵反力を大きくする制御装置とを備えることを特徴とする運転支援装置。
【請求項2】
運転者に警告する警報手段を備え、前記判定手段により車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には前記警報手段により運転者に警告することを特徴とする請求項1に記載の運転支援装置。
【請求項3】
前記撮像手段は、サイドミラーに設けられたステレオカメラであることを特徴とする請求項1又は請求項2に記載の運転支援装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−91462(P2013−91462A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235787(P2011−235787)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]