
運転模擬装置及びその制御プログラム
【課題】運転を模擬するための運転模擬装置であって、特に、様々な状況に応じてより現実に近い運転状態/視界状態を与えることのできる運転模擬装置等を提供する。
【解決手段】操作者の操作に応答して運転席からの視界の模擬画像を表示し、模擬運転を体験させる運転模擬装置が、模擬画像を表示する表示手段と、操作情報を生成する操作手段と、操作情報と仮想空間を表現するデータに基づいて、運転される仮想空間内の移動体の運動状態を求め、運動状態情報と仮想空間を表現するデータに基づいて、前方についての前方視界模擬画像を生成して表示手段に表示させる制御手段と、を有し、制御手段は、運動状態情報である、移動体の位置、移動速度、及び、移動方向のうちの何れかが所定の条件を満たす場合に、前方以外の方向について他視界模擬画像を生成し前方視界模擬画像内の一部の領域に合成して表示手段に表示させる。
【解決手段】操作者の操作に応答して運転席からの視界の模擬画像を表示し、模擬運転を体験させる運転模擬装置が、模擬画像を表示する表示手段と、操作情報を生成する操作手段と、操作情報と仮想空間を表現するデータに基づいて、運転される仮想空間内の移動体の運動状態を求め、運動状態情報と仮想空間を表現するデータに基づいて、前方についての前方視界模擬画像を生成して表示手段に表示させる制御手段と、を有し、制御手段は、運動状態情報である、移動体の位置、移動速度、及び、移動方向のうちの何れかが所定の条件を満たす場合に、前方以外の方向について他視界模擬画像を生成し前方視界模擬画像内の一部の領域に合成して表示手段に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車などの運転を模擬するための運転模擬装置等に関し、特に、様々な状況に応じてより現実に近い運転状態/視界状態を与えることのできる運転模擬装置等に関する。
【背景技術】
【0002】
従来、運転教習所では、教習の初期段階等において実際の自動車を運転する代わりに運転模擬装置を用いる場合がある。かかる運転模擬装置は、操作者の操作に応答して仮想空間内の仮想自動車を移動させ、当該仮想自動車の運転席から見える景観を操作者に表示するように構成されている。また、ドライビングゲームも予てより普及しており、ここでも同様の運転模擬装置が用いられている。
【0003】
このような運転模擬装置においては、実際の運転により近い状態を作り出すために様々な工夫がなされており、特に、最近の表示処理能力の向上に伴って、複数の視界の画像を操作者に提供するための改良がなされている。
【0004】
例えば、下記特許文献1には、左折時などには左後方の交通状態が確認でき、運転者が不安を感ぜず十分な道路走行の教習を行える自動車運転模擬表示方法等について記載され、方向指示器スイッチレバーを左側方向指示器が点灯するように操作した場合、表示画面の左側に設けた左ドアミラー表示画像領域に左ドアミラーの画像を表示することなどが示されている。
【0005】
また、自動車の前方以外の方向の画像をスイッチ操作で表示させるようにした運転模擬装置もある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−66533号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1に記載の装置では、ある決まった状況でドアミラー画像を出すというものであり、それ以外の運転状況には対応できず、また、運転者が首を振って左右の状況を確認するような場合の画像も提供されないので、実際の運転に近づけるためには未だ機能不足である。
【0008】
また、上述したスイッチ操作を伴う画像表示は、実際には運転者が首を振って直接見る画像を提供するものであるので、実際には必要としないスイッチ操作をする必要があり不自然であると共に、運転を煩雑にし危険発見の遅れにつながる虞がある。
【0009】
そこで、本発明の目的は、自動車などの運転を模擬するための運転模擬装置であって、特に、様々な状況に応じてより現実に近い運転状態/視界状態を与えることのできる運転模擬装置、等を提供することである。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、本発明の一つの側面は、操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置が、前記模擬画像を表示する表示手段と、前記操作者の操作の状態を示す操作情報を生成する操作手段と、前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示手段に表示させる制御手段と、を有し、前記制御手段は、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示手段に表示させる、ことである。
【0011】
更に、上記の発明において、一つの態様は、前記制御手段は、当該移動体の位置が前記仮想空間内の所定領域に入っていることを前記所定の条件とする、ことを特徴とする。
【0012】
更に、上記の発明において、一つの態様は、前記制御手段は、当該移動体の移動速度が所定範囲に入っていることを前記所定の条件とする、ことを特徴とする。
【0013】
更にまた、上記の発明において、一つの態様は、前記制御手段は、所定の前記操作情報が生成されたことに応じて前記他視界模擬画像を前記表示手段に表示させる、ことを特徴とする。
【0014】
更に、上記の発明において、一つの態様は、前記所定の操作情報は、前記操作手段が備える方向指示器スイッチレバーがオンであることを示す情報である、ことを特徴とする。
【0015】
更にまた、上記の発明において、好ましい態様は、更に、前記操作者の視線の方向を検出する検出手段を有し、前記制御手段は、前記検出手段が前記視線の方向が前方をはずれたことを検出したことに応じて前記他視界模擬画像を前記表示手段に表示させる、ことを特徴とする。
【0016】
上記の目的を達成するために、本発明の別の側面は、操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置用の制御プログラムにおいて、前記運転模擬装置には、前記模擬画像を表示する表示部と、前記操作者の操作の状態を示す操作情報を生成する操作部と、制御部とが備えられ、前記制御部に、前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示ぶに表示させる、処理を実行させ、前記制御部に、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示部に表示させる、処理を実行させる、ことである。
【0017】
本発明の更なる目的及び、特徴は、以下に説明する発明の実施の形態から明らかになる。
【図面の簡単な説明】
【0018】
【図1】本発明を適用した運転模擬装置の実施の形態例に係る概略構成図である。
【図2】本運転模擬装置1の外観斜視図である。
【図3】制御部3の概略機能構成図である。
【図4】制御部3の処理内容を例示したフローチャートである。
【図5】画像生成部33が生成する3画面モニタ用の画像を例示した図である。
【図6】画像生成部33が生成する1画面モニタ用の画像を例示した図である。
【図7】3画面モニタ用の画像の視点と視界を例示した図である。
【図8】1画面モニタ用の画像の視点と視界を例示した図である。
【図9】交差点での右左折を行う状況を説明するための図である。
【図10】停止状態から発進する状況を説明するための図である。
【発明を実施するための形態】
【0019】
以下、図面を参照して本発明の実施の形態例を説明する。しかしながら、かかる実施の形態例が、本発明の技術的範囲を限定するものではない。なお、図において、同一又は類似のものには同一の参照番号又は参照記号を付して説明する。
【0020】
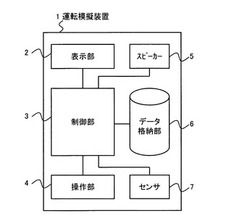
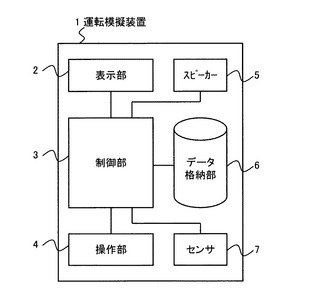
図1は、本発明を適用した運転模擬装置の実施の形態例に係る概略構成図である。図1に示す運転模擬装置1が本発明を適用した運転模擬装置であり、少なくとも、操作者の操作に応じて仮想空間内を移動する移動体100(仮想自動車)の運動状態が所定の条件を満たした場合に、前方以外の所定の方向の視界についての模擬画像を操作者に提供し、より現実に近い運転状態を実現しようとするものである。
【0021】
図1に示す本実施の形態例に係る運転模擬装置1は、図に示すように、表示部2、制御部3、操作部4、スピーカー5、データ格納部6、及びセンサ7等を備え、操作者の操作部4に対する操作に応答して仮想空間内の移動体100を移動させ、その運転席101からの視界の模擬画像を随時表示部2に表示させるように構成されている。また、ここでは、運転模擬装置1は、運転教習用の装置であるものとする。
【0022】
まず、操作部4は、操作者が模擬運転を行うための操作手段であり、通常の自動車が備えるハンドル、アクセル、ブレーキ、シフトレバー、方向指示器スイッチレバー等を備えている。当該操作部4は、操作部の状態、すなわち、操作者の操作の状態を示す操作情報を生成する。
【0023】
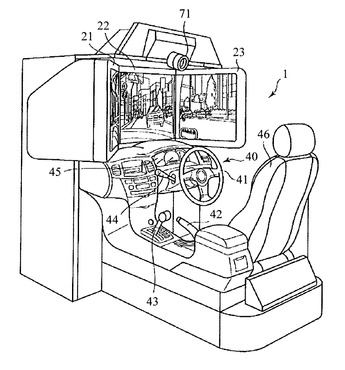
図2は、本運転模擬装置1の外観斜視図である。図2には、操作部4の一部として、ハンドルユニット40、ステアリングホイール41、ハンドブレーキ42、チェンジレバー43、コンビネーションスイッチ44、コンビネーションメータユニット45が示されている。また、運転模擬装置1には、操作者が前方を向いて座るように座席46が設けられている。
【0024】
次に、センサ7は、操作者の視線の方向を検出する検出手段であり、ここでは、一例として、図2に示されるカメラ71とそれに接続されるルックセンサシステムによって構成される。なお、この画像による方法ではなく、操作者に装着したジャイロを用いて頭の動きを捉え操作者の視線方向を検出する方法など、操作者の視線方向を検出できるものであれば他の方法を用いることができる。
【0025】
表示部2は、座席46に座った操作者に上記模擬画像を表示するためのモニタであり、図2に示すように、座席46の前面に設置される。ここでは、左側モニタ21、中央モニタ22、及び右側モニタ23を備えた3画面のモニタを示しているが1画面のモニタであってもよい。この表示部2には、模擬運転中、通常表示されている通常視界画像と、所定の状況のときに表示される他視界画像が表示される。通常視界画像には、操作者によって操作される仮想空間内の移動体100の運転席101から前方を見た時の前方視界画像(600、900)と運転席101から各ミラーを用いて見た時の画像(603−605、903−905)含まれる。また、他視界画像は、運転席101から前方以外の方向を見た時の視界の画像(601、602、901、902)であり、状況に応じて、また、操作者の視線方向に応じて様々な方向の画像が含まれる。
【0026】
スピーカー5は、操作者に対する案内や警告を行うための音声を出力する部分である。
【0027】
データ格納部6は、車両や通行人などを含む仮想空間を構成する各オブジェクトの3Dデータ等、移動体100の運動計算や表示部2に表示する模擬画像の生成に必要なデータを収めたHDDなどのデータ格納手段である。
【0028】
次に、制御部3は、上記表示部2に表示される画像及び上記スピーカー5から出力される音声を制御する部分であり、CPU、ROM、RAM、ASICなどで構成されている。制御部3は、模擬運転中、所定のタイムサイクルで、上記操作部4に対して操作者によって行われた操作の情報(操作情報)、及び、上記センサ7が検出した操作者の動作の情報(動作情報)を受信して、上記データ格納部6に格納されるデータを用い、その時点での仮想空間内での移動体100の運動状態を求め、その運動状態の情報(運動状態情報)に基づいて上記模擬画像を生成し、表示部2に表示させる。
【0029】
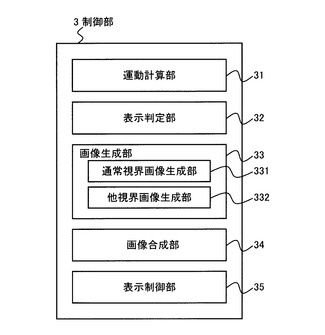
図3は、制御部3の概略機能構成図である。図3に示すように、制御部3は、画像の表示に係る機能については、運動計算部31、表示判定部32、画像生成部33、画像合成部34、及び表示制御部35を備えている。運動計算部31は、上記仮想空間内での移動体100の運動状態を演算する部分であり、表示判定部32は、その時点で表示すべき上記模擬画像を決定する部分であり、画像生成部33は、表示する上記模擬画像を生成する部分であり、画像合成部34は、生成された複数の上記模擬画像を合成する部分であり、表示制御部35は、合成された上記模擬画像を表示部2に表示する部分である。また、画像生成部33は、通常視界画像生成部331と他視界画像生成部332を備え、前者は、上述した通常視界画像を生成し、後者は、上述した他視界画像を生成する。
【0030】
なお、これらの各機能構成部(31−35)は、上記ROM等に格納されたプログラムと、当該プログラムに従って処理を実行する上記CPU等によって構成されている。
【0031】
以上説明したような構成を有する本実施の形態例に係る運転模擬装置1は、上記表示判定部32の判定により、所定の状況になった際に他視界画像を生成、表示することに特徴があり、以下その点を中心に、画像が表示されるまでの処理について具体的に説明する。
【0032】
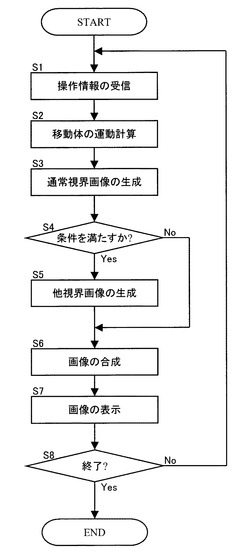
図4は、制御部3の処理内容を例示したフローチャートである。制御部3は、模擬運転が開始されると、所定の時間間隔で図4のステップS1からステップS8の処理を、模擬運転が終了するまで繰り返し実行する。
【0033】
まず、その時点の操作部4の状態を示す操作情報を操作部4から受信する(ステップS1)。当該操作情報には、少なくとも、方向指示器スイッチレバーのON/OFF情報、アクセルの角度情報、ハンドルの回転情報などが含まれる。
【0034】
次に、運動計算部31は、上記受信した操作情報により操作の内容を把握し、当該操作によって仮想空間内の移動体100の状態がどのように変化するかを演算する(ステップS2)。その結果、少なくとも、移動体100の仮想空間内での位置情報、移動体100の移動速度情報、移動体100の移動方向情報を含む運動状態情報が生成される。また、移動体100の位置に基づいて仮想空間内の他のオブジェクトとの干渉等についてもチェックがなされる。
【0035】
次に、通常視界画像生成部331が、上記生成された運動状態情報に基づいて、データ格納部6に格納されるデータを用い、通常視界画像を生成する(ステップS3)。すなわち、上述した前方視界画像と各ミラーを用いて見た時の画像を生成する。
【0036】
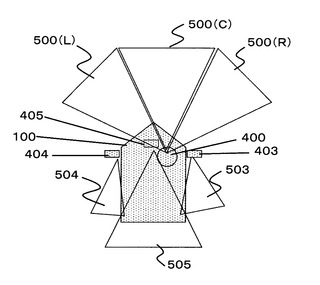
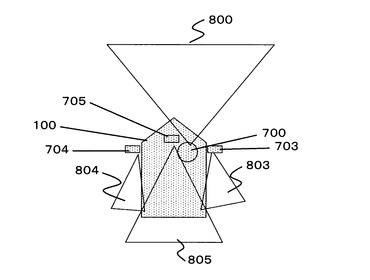
図5は、画像生成部33が生成する3画面モニタ用の画像を例示した図である。また、図6は、画像生成部33が生成する1画面モニタ用の画像を例示した図である。また、図7は、3画面モニタ用の画像の視点と視界を例示した図である。また、図8は、1画面モニタ用の画像の視点と視界を例示した図である。
【0037】
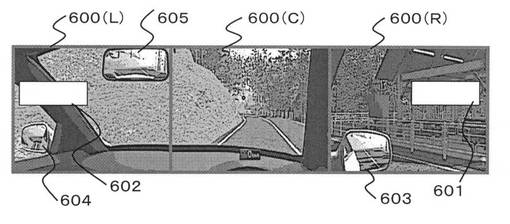
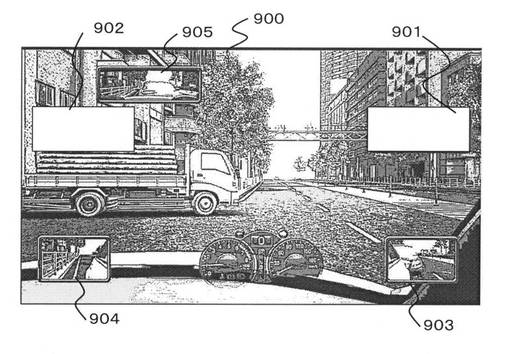
3画面のモニタを用いる場合の前方視界画像600は、例えば、図5に示される600(L)、600(C)、及び600(R)である。この場合には、前方視界画像600が、左側モニタ21、中央モニタ22、及び右側モニタ23のそれぞれに合わせて、3分割されている。また、1画面のモニタの場合には、例えば、図6に示される前方視界画像900のようになる。
【0038】
また、上記前方視界画像600(L)、600(C)、及び600(R)は、それぞれ、図7に示す視点400からの視界500(L)、500(C)、及び500(R)による画像である。言い換えれば、視点400の位置に仮想カメラを置いてそれぞれの視界を捉えた際の仮想空間内での模擬画像である。同様に、上記前方視界画像900は、図8に示す視点700からの視界800による画像である。
【0039】
なお、視点400、700の位置は、移動体100の運転席101の位置に相当する。
【0040】
次に、サイドミラーを用いて見える画像は、3画面モニタでは、例えば、図5の右サイドミラー画像603及び左サイドミラー画像604であり、1画面モニタでは、例えば、図6の右サイドミラー画像903及び左サイドミラー画像904である。
【0041】
これらサイドミラー画像のそれぞれの視点(仮想カメラの位置)とその視界は、それぞれ、図7の視点403及び404、視界503及び504、並びに、図8の視点703及び704、視界803及び804である。
【0042】
また、バックミラーを用いて見える画像は、3画面モニタでは、例えば、図5のバックミラー画像605であり、1画面モニタでは、例えば、図6のバックミラー画像905である。これらバックミラー画像のそれぞれの視点(仮想カメラの位置)とその視界は、それぞれ、図7の視点405及び視界505、並びに、図8の視点705及び視界805である。
【0043】
なお、上記ミラーを用いた場合に見える画像の実際の視点は400と700である。
【0044】
次に、制御部3の表示判定部32は、上述した他視界画像をこの時点で表示するか否かの判定を行う(ステップS4)。当該判定が本運転模擬装置1の大きな特徴である。
【0045】
当該判定では、移動体の運転者(運転模擬装置1の操作者)が、首を振るなどして視線を前方からはずす、本運転模擬装置1のように教習用の場合には視線をはずすべき、状況であるか否かを判断する。言い換えれば、前方以外の方向をミラーを用いずに見る状況であるか否かを判断する。
【0046】
具体的には、当該状況になったか否かを、少なくとも、その時点の移動体100の運動状態に基づいて、より具体的には、上記運動計算(S2)で生成された運動状態情報を用いて判断する。また、以下に具体例として説明するように、上記運動状態と、その時点の操作部4の状態、すなわち、上記操作情報に基づいて判断しても良いし、その時点の操作者の視線方向、すなわち、上記動作情報に基づいて判断しても良い。
【0047】
上記判断する状況は、例えば、交差点において左折又は右折をする状況、停止している状態から発進する状況、車線を変更する状況、交差点を通過する状況などである。
【0048】
本運転模擬装置1では、これらの状況を判断するための条件が設けられており、表示判定部32は、具体的には、当該条件を満たしているか否かを判定する処理を行う。当該条件と具体的な判定については後述する。
【0049】
なお、通常の場合は、当該表示判定部32による判定は、上記生成された通常視界画像を常に表示するものとして、他視界画像の表示・非表示について判定するが、判断された上記状況によっては、通常視界画像を表示せずに他視界画像のみを表示するという判定を行っても良い。
【0050】
また、上記他視界画像のモニタ上の表示位置(表示領域)は、固定にしても良いし可変にしてもよい。可変にする場合には、当該表示判定部32が判断した上記状況に応じて表示位置を決定する。
【0051】
かかる判定の結果、表示判定部32が上記条件を満たしている、すなわち、他視界画像を表示すべきと判定した場合には(ステップS4のYes)、他視界画像生成部332が他視界画像を生成する(ステップS5)。一方、上記条件を満たしていない場合には(ステップS4のNo)、処理がステップS6に移行する。
【0052】
他視界画像生成部332による生成が行われる場合には、上記判断されたその時点の状況に相応しい視線方向の視界画像を、上記その時点の運動状態情報に基づいてデータ格納部6に格納されるデータを用い生成する。具体的状況とそれに相応する視点及び視界については後述する。
【0053】
次に、ステップS6では、画像合成部34が画像の合成処理を行う。具体的には、上記生成された通常視界画像の上述した前方視界画像とミラーを用いてみた画像を、例えば、図5及び図6に示すような配置で合成し、さらに、上記判定(S4)により他視界画像を表示する場合には、生成された他視界画像をさらに合成する。
【0054】
3画面モニタの場合には、例えば、図5に示す画像601及び602が他視界画像であり、1画面モニタの場合には、例えば、図6に示す画像901及び902が他視界画像である。これらの図に示すように、一例としては、モニタの左側と右側の比較的小さい領域に(小窓のように)表示されるように、他視界画像が通常視界画像に合成される。
【0055】
また、左右の他視界画像は、その時点の状況に応じて、片方のみを表示したり両方を表示したりすることができる。さらに、上述のとおり、他視界画像のみをモニタに表示するように画像の合成を行ってもよい。また、図5及び図6に示す他視界画像の大きさは一例であり、その時点の状況に応じて可変にするようにしてもよい。
【0056】
次に、当該合成された画像を、表示制御部35がモニタ(表示部2)に表示させる(ステップS7)。この際、表示制御部35は、モニタに移動体100のダッシュボードを表示する場合には、当該ダッシュボード上のメータユニットに表示するデータを上記運転状態情報や操作情報から取得して、上記画像に合成して表示する。例えば、その時点の移動体100の移動速度や方向指示器のオン・オフの状態が合成される。
【0057】
当該表示処理が終了すると、当該1サイクルの処理が終了し、制御部3は、現在行っている模擬運転を終了するか否かの終了判定を行う(ステップS8)。具体的には、当該模擬運転の用意されたカリキュラムが全て終了した場合、あるいは、移動体100(仮想自動車)が通行人や障害物に接触した場合などに終了であると判定される(ステップS8のYes)。また、終了と判定されない場合には(ステップS8のNo)、次のサイクルの処理が上述したステップS1から開始される。
【0058】
そして、上記終了判定がなされれば、当該模擬運転の処理が終了する。
【0059】
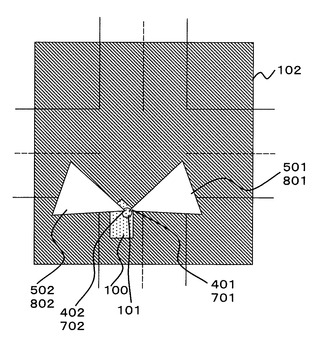
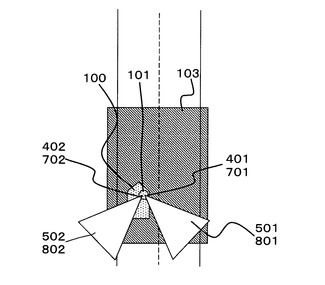
次に、上述した他視界画像を表示するか否かの判定及び他視界画像の視界について、具体的な例を説明する。まず、一例として、表示判定部32は、仮想空間内の移動体100が交差点での右左折を行う状況であると判断した場合に、他視界画像の表示を行うと判定する。図9は、かかる場合の状況を説明するための図である。そして、この場合の判定条件は、以下の三つである。
条件(1):仮想空間内の移動体100の現在位置が交差点領域(図9の領域102、例えば、交差点の中心位置から進行方向前後及び左右に30m以内の領域)内であること
条件(2):仮想空間内の移動体100の移動速度が時速0km以上時速15km以下であること
条件(3):操作部4の方向指示器スイッチレバーが左方向又は右方向を指示させる状態である(オンであること)
上記条件(1)及び(2)は、上述したように移動体100の運動状態情報から満足するか否かが判断され、上記条件(3)については、上述した操作情報から満足するか否かが判断される。その結果、全ての条件が満たされている場合に、他視界画像の表示を行うと判定する。
【0060】
そして、この場合に生成、表示される他視界画像は以下の視点と視界によって生成されるものである。
視点位置:移動体100の運転席101(具体的には、運転者の頭部位置)
視界方向:移動体100の進行方向から左又は右に70度の方向
視界角度:45度
なお、方向指示器スイッチレバーが左方向を指示させる状態であれば(すなわち、左折中の状況であると判断されれば)、上記視界方向は左に70度の方向であり、方向指示器スイッチレバーが右方向を指示させる状態であれば(すなわち、右折中の状況であると判断されれば)、上記視界方向は右に70度の方向である。
【0061】
図9には、左折時の視点402、702と視界502、802、及び、右折時の視点401、701と視界501、801が例示されている。
【0062】
次の例として、表示判定部32は、仮想空間内の移動体100が停止状態から発進する状況であると判断した場合に、他視界画像の表示を行うと判定する。図10は、かかる場合の状況を説明するための図である。そして、この場合の判定条件は、以下の三つである。
条件(4):仮想空間内の移動体100の現在位置が停止領域(図10の領域103、例えば、最初の発進位置など教習カリキュラムの停止すべき位置を含む領域)内であること
条件(5):仮想空間内の移動体100の移動速度が時速0kmであること
条件(6):操作部4の方向指示器スイッチレバーが左方向又は右方向を指示させる状態である(オンであること)
上記条件(4)及び(5)は、上述したように運動状態情報から満足するか否かが判断され、上記条件(6)については、上述した操作情報から満足するか否かが判断される。その結果、全ての条件が満たされている場合に、他視界画像の表示を行うと判定する。
【0063】
そして、この場合に生成、表示される他視界画像は以下の視点と視界によって生成されるものである。
視点位置:移動体100の運転席101(具体的には、運転者の頭部位置)
視界方向:移動体100の進行方向から左又は右に135度の方向
視界角度:45度
なお、方向指示器スイッチレバーが左方向を指示させる状態であれば(すなわち、左側に発進する状況であると判断されれば)、上記視界方向は左に135度の方向であり、方向指示器スイッチレバーが右方向を指示させる状態であれば(すなわち、右側に発進する状況であると判断されれば)、上記視界方向は右に135度の方向である。
【0064】
図10には、左側発進時の視点402、702と視界502、802、及び、右側発進時の視点401、701と視界501、801が例示されている。
【0065】
また、別の例として、表示判定部32は、仮想空間内の移動体100が車線変更をする状況であると判断した場合に、他視界画像の表示を行うと判定する。この場合の判定条件は、以下の通りである。
条件(7):仮想空間内の移動体100の移動速度が時速30km以上であること
条件(8):操作部4の方向指示器スイッチレバーが左方向又は右方向を指示させる状態である(オンであること)
そして、この場合に生成、表示される他視界画像は、以下の視点と視界によって生成されるものである。
視点位置:移動体100の運転席101(具体的には、運転者の頭部位置)
視界方向:移動体100の進行方向から左又は右に135度の方向
視界角度:45度
なお、移動体100の車線変更可能領域を設けて、移動体100の位置がその領域内であるか否かを条件として加えてもよい。
【0066】
また、上記運転状態情報だけの条件で判定する例として、交差点を直進する状況である場合に他視界画像の表示を行うと判定する。かかる場合には、例えば、移動体100が上記交差点領域内に位置し、所定の速度以下で移動中である、という判定条件が用いられる。そして、その条件が満足された場合には、移動体100の進行方向に対して左右を運転者が目視した場合の画像が生成されて表示される。
【0067】
以上説明したように、本運転模擬装置1では、運転者が視線を向けて目視である方向の状態を確認すべき状況を捉えて、その状況で運転者が目視で見た場合の画像を提供する。
【0068】
なお、上述の例などにおいて、運転者が左側を見た場合の他視界画像は、図5及び図6の画像602及び画像902のように、モニタの左側に表示され、運転者が右側を見た場合の他視界画像は、図5及び図6の画像601及び画像901のように、モニタの右側に表示される。
【0069】
また、以上の具体的説明では、他視界画像の表示を行うか否かの判定を上記運転状態情報と上記操作情報に基づいて行った場合であったが、上述したように上記動作情報に基づいて行ってもよい。具体的には、センサ7が検出する操作者の視線方向が前方でない方向であること、より具体的には、左側又は右側の所定範囲内の方向であることを、上記判定の条件に加えるようにしてもよい。
【0070】
例えば、上述した交差点の右左折時や発進時の条件に上記視線方向の条件を加えるようにすることができる。かかる場合には、操作者が実際に首を振って確認行為を行った場合にのみ他視界画像が提供されるので、より現実に近い状態にすることができる。なお、この場合には、提供する画像を上記検出された視線方向で得られる視界の画像とするようにしてもよい。
【0071】
また、上記検出した視線方向の条件のみを判定条件としてもよい。この場合には、操作者が、視線を前方からある一定程度以上ずらした場合に、その方向の視界の画像が生成されて表示されるようになる。
【0072】
また、上述の説明では、各ミラーを用いて見た画像は通常前方視界画像に合成されて、通常、表示されるものとしたが、当該ミラー画像も、運転者がミラーを見るべき状況を判定して、又は、操作者が視線を変えてミラー方向を見たことを検出して、かかる状況である場合にのみ表示するようにしてもよい。
【0073】
また、本運転模擬装置1では、上述したような他視界画像の表示を実行可能なモードと、実行可能でないモード、すなわち、通常視界画像のみを表示するモードを切り換えて設定可能にするようにすることができる。後者のモードでは、図4のステップS4及びS5が省かれた処理が行なわれ、一連の模擬運転が終了するまで他視界画像は表示されない。
【0074】
なお、本運転模擬装置1を教習所等で用いる場合には、複数の当該装置1と一つの管理用装置をネットワークで接続した構成とすることができる。この場合、当該管理用装置は、データ処理部やモニタ等を備え、各運転模擬装置1の教習用コース及び上記モードの設定や操作状態及び運転状態の監視ができる機能を有する。
【0075】
以上説明したように、本実施の形態例に係る運転模擬装置1では、運転者が前方以外の方向を目視で確認する状況、確認すべき状況を、少なくとも、模擬運転される車両の運動状態に基づいて捉え、その場合に、当該確認によって見られる画像を提供するので、従来よりも実際の運転に近い状態を実現でき、教習の効果を向上させることができる。
【0076】
また、上記目視確認を必要とする状況は、模擬運転に必要な模擬画像の生成のために計算される車両の運動状態や運転者の操作内容による条件で設定できるので、より現実に近い様々な運転状況を模擬することができるようになる。
【0077】
また、上述したように、他視界画像を表示しないモードを設定可能とすることにより、両モードの模擬運転を通じて、教習を受ける者に対して目視確認の必要性をより強く認識させることができる。
【0078】
なお、本実施の形態例では、運転模擬装置を自動車の教習用装置として説明したが、本発明は、運転が必要な他の乗り物の教習用装置やゲーム機としての模擬装置に適用することもできる。
【0079】
本発明の保護範囲は、上記の実施の形態に限定されず、特許請求の範囲に記載された発明とその均等物に及ぶものである。
【符号の説明】
【0080】
1 運転模擬装置
2 表示部(表示手段)
3 制御部(制御手段)
4 操作部(操作手段)
5 スピーカー
6 データ格納部
7 センサ(検出手段)
21 左側モニタ
22 中央モニタ
23 右側モニタ
31 運動計算部
32 表示判定部
33 画像生成部
34 画像合成部
35 表示制御部
40 ハンドルユニット
41 ステアリングホイール
42 ハンドブレーキ
43 チェンジレバー
44 コンビネーションスイッチ
45 コンビネーションメータユニット
46 座席
71 カメラ
100 移動体
101 運転席
102 交差点領域
103 発進領域
331 通常視界画像生成部
332 他視界画像生成部
400−405 視点(仮想カメラ)
500−505 視界
600−605 画像
700−705 視点(仮想カメラ)
800−805 視界
900−905 画像
【技術分野】
【0001】
本発明は、自動車などの運転を模擬するための運転模擬装置等に関し、特に、様々な状況に応じてより現実に近い運転状態/視界状態を与えることのできる運転模擬装置等に関する。
【背景技術】
【0002】
従来、運転教習所では、教習の初期段階等において実際の自動車を運転する代わりに運転模擬装置を用いる場合がある。かかる運転模擬装置は、操作者の操作に応答して仮想空間内の仮想自動車を移動させ、当該仮想自動車の運転席から見える景観を操作者に表示するように構成されている。また、ドライビングゲームも予てより普及しており、ここでも同様の運転模擬装置が用いられている。
【0003】
このような運転模擬装置においては、実際の運転により近い状態を作り出すために様々な工夫がなされており、特に、最近の表示処理能力の向上に伴って、複数の視界の画像を操作者に提供するための改良がなされている。
【0004】
例えば、下記特許文献1には、左折時などには左後方の交通状態が確認でき、運転者が不安を感ぜず十分な道路走行の教習を行える自動車運転模擬表示方法等について記載され、方向指示器スイッチレバーを左側方向指示器が点灯するように操作した場合、表示画面の左側に設けた左ドアミラー表示画像領域に左ドアミラーの画像を表示することなどが示されている。
【0005】
また、自動車の前方以外の方向の画像をスイッチ操作で表示させるようにした運転模擬装置もある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−66533号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1に記載の装置では、ある決まった状況でドアミラー画像を出すというものであり、それ以外の運転状況には対応できず、また、運転者が首を振って左右の状況を確認するような場合の画像も提供されないので、実際の運転に近づけるためには未だ機能不足である。
【0008】
また、上述したスイッチ操作を伴う画像表示は、実際には運転者が首を振って直接見る画像を提供するものであるので、実際には必要としないスイッチ操作をする必要があり不自然であると共に、運転を煩雑にし危険発見の遅れにつながる虞がある。
【0009】
そこで、本発明の目的は、自動車などの運転を模擬するための運転模擬装置であって、特に、様々な状況に応じてより現実に近い運転状態/視界状態を与えることのできる運転模擬装置、等を提供することである。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、本発明の一つの側面は、操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置が、前記模擬画像を表示する表示手段と、前記操作者の操作の状態を示す操作情報を生成する操作手段と、前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示手段に表示させる制御手段と、を有し、前記制御手段は、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示手段に表示させる、ことである。
【0011】
更に、上記の発明において、一つの態様は、前記制御手段は、当該移動体の位置が前記仮想空間内の所定領域に入っていることを前記所定の条件とする、ことを特徴とする。
【0012】
更に、上記の発明において、一つの態様は、前記制御手段は、当該移動体の移動速度が所定範囲に入っていることを前記所定の条件とする、ことを特徴とする。
【0013】
更にまた、上記の発明において、一つの態様は、前記制御手段は、所定の前記操作情報が生成されたことに応じて前記他視界模擬画像を前記表示手段に表示させる、ことを特徴とする。
【0014】
更に、上記の発明において、一つの態様は、前記所定の操作情報は、前記操作手段が備える方向指示器スイッチレバーがオンであることを示す情報である、ことを特徴とする。
【0015】
更にまた、上記の発明において、好ましい態様は、更に、前記操作者の視線の方向を検出する検出手段を有し、前記制御手段は、前記検出手段が前記視線の方向が前方をはずれたことを検出したことに応じて前記他視界模擬画像を前記表示手段に表示させる、ことを特徴とする。
【0016】
上記の目的を達成するために、本発明の別の側面は、操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置用の制御プログラムにおいて、前記運転模擬装置には、前記模擬画像を表示する表示部と、前記操作者の操作の状態を示す操作情報を生成する操作部と、制御部とが備えられ、前記制御部に、前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示ぶに表示させる、処理を実行させ、前記制御部に、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示部に表示させる、処理を実行させる、ことである。
【0017】
本発明の更なる目的及び、特徴は、以下に説明する発明の実施の形態から明らかになる。
【図面の簡単な説明】
【0018】
【図1】本発明を適用した運転模擬装置の実施の形態例に係る概略構成図である。
【図2】本運転模擬装置1の外観斜視図である。
【図3】制御部3の概略機能構成図である。
【図4】制御部3の処理内容を例示したフローチャートである。
【図5】画像生成部33が生成する3画面モニタ用の画像を例示した図である。
【図6】画像生成部33が生成する1画面モニタ用の画像を例示した図である。
【図7】3画面モニタ用の画像の視点と視界を例示した図である。
【図8】1画面モニタ用の画像の視点と視界を例示した図である。
【図9】交差点での右左折を行う状況を説明するための図である。
【図10】停止状態から発進する状況を説明するための図である。
【発明を実施するための形態】
【0019】
以下、図面を参照して本発明の実施の形態例を説明する。しかしながら、かかる実施の形態例が、本発明の技術的範囲を限定するものではない。なお、図において、同一又は類似のものには同一の参照番号又は参照記号を付して説明する。
【0020】
図1は、本発明を適用した運転模擬装置の実施の形態例に係る概略構成図である。図1に示す運転模擬装置1が本発明を適用した運転模擬装置であり、少なくとも、操作者の操作に応じて仮想空間内を移動する移動体100(仮想自動車)の運動状態が所定の条件を満たした場合に、前方以外の所定の方向の視界についての模擬画像を操作者に提供し、より現実に近い運転状態を実現しようとするものである。
【0021】
図1に示す本実施の形態例に係る運転模擬装置1は、図に示すように、表示部2、制御部3、操作部4、スピーカー5、データ格納部6、及びセンサ7等を備え、操作者の操作部4に対する操作に応答して仮想空間内の移動体100を移動させ、その運転席101からの視界の模擬画像を随時表示部2に表示させるように構成されている。また、ここでは、運転模擬装置1は、運転教習用の装置であるものとする。
【0022】
まず、操作部4は、操作者が模擬運転を行うための操作手段であり、通常の自動車が備えるハンドル、アクセル、ブレーキ、シフトレバー、方向指示器スイッチレバー等を備えている。当該操作部4は、操作部の状態、すなわち、操作者の操作の状態を示す操作情報を生成する。
【0023】
図2は、本運転模擬装置1の外観斜視図である。図2には、操作部4の一部として、ハンドルユニット40、ステアリングホイール41、ハンドブレーキ42、チェンジレバー43、コンビネーションスイッチ44、コンビネーションメータユニット45が示されている。また、運転模擬装置1には、操作者が前方を向いて座るように座席46が設けられている。
【0024】
次に、センサ7は、操作者の視線の方向を検出する検出手段であり、ここでは、一例として、図2に示されるカメラ71とそれに接続されるルックセンサシステムによって構成される。なお、この画像による方法ではなく、操作者に装着したジャイロを用いて頭の動きを捉え操作者の視線方向を検出する方法など、操作者の視線方向を検出できるものであれば他の方法を用いることができる。
【0025】
表示部2は、座席46に座った操作者に上記模擬画像を表示するためのモニタであり、図2に示すように、座席46の前面に設置される。ここでは、左側モニタ21、中央モニタ22、及び右側モニタ23を備えた3画面のモニタを示しているが1画面のモニタであってもよい。この表示部2には、模擬運転中、通常表示されている通常視界画像と、所定の状況のときに表示される他視界画像が表示される。通常視界画像には、操作者によって操作される仮想空間内の移動体100の運転席101から前方を見た時の前方視界画像(600、900)と運転席101から各ミラーを用いて見た時の画像(603−605、903−905)含まれる。また、他視界画像は、運転席101から前方以外の方向を見た時の視界の画像(601、602、901、902)であり、状況に応じて、また、操作者の視線方向に応じて様々な方向の画像が含まれる。
【0026】
スピーカー5は、操作者に対する案内や警告を行うための音声を出力する部分である。
【0027】
データ格納部6は、車両や通行人などを含む仮想空間を構成する各オブジェクトの3Dデータ等、移動体100の運動計算や表示部2に表示する模擬画像の生成に必要なデータを収めたHDDなどのデータ格納手段である。
【0028】
次に、制御部3は、上記表示部2に表示される画像及び上記スピーカー5から出力される音声を制御する部分であり、CPU、ROM、RAM、ASICなどで構成されている。制御部3は、模擬運転中、所定のタイムサイクルで、上記操作部4に対して操作者によって行われた操作の情報(操作情報)、及び、上記センサ7が検出した操作者の動作の情報(動作情報)を受信して、上記データ格納部6に格納されるデータを用い、その時点での仮想空間内での移動体100の運動状態を求め、その運動状態の情報(運動状態情報)に基づいて上記模擬画像を生成し、表示部2に表示させる。
【0029】
図3は、制御部3の概略機能構成図である。図3に示すように、制御部3は、画像の表示に係る機能については、運動計算部31、表示判定部32、画像生成部33、画像合成部34、及び表示制御部35を備えている。運動計算部31は、上記仮想空間内での移動体100の運動状態を演算する部分であり、表示判定部32は、その時点で表示すべき上記模擬画像を決定する部分であり、画像生成部33は、表示する上記模擬画像を生成する部分であり、画像合成部34は、生成された複数の上記模擬画像を合成する部分であり、表示制御部35は、合成された上記模擬画像を表示部2に表示する部分である。また、画像生成部33は、通常視界画像生成部331と他視界画像生成部332を備え、前者は、上述した通常視界画像を生成し、後者は、上述した他視界画像を生成する。
【0030】
なお、これらの各機能構成部(31−35)は、上記ROM等に格納されたプログラムと、当該プログラムに従って処理を実行する上記CPU等によって構成されている。
【0031】
以上説明したような構成を有する本実施の形態例に係る運転模擬装置1は、上記表示判定部32の判定により、所定の状況になった際に他視界画像を生成、表示することに特徴があり、以下その点を中心に、画像が表示されるまでの処理について具体的に説明する。
【0032】
図4は、制御部3の処理内容を例示したフローチャートである。制御部3は、模擬運転が開始されると、所定の時間間隔で図4のステップS1からステップS8の処理を、模擬運転が終了するまで繰り返し実行する。
【0033】
まず、その時点の操作部4の状態を示す操作情報を操作部4から受信する(ステップS1)。当該操作情報には、少なくとも、方向指示器スイッチレバーのON/OFF情報、アクセルの角度情報、ハンドルの回転情報などが含まれる。
【0034】
次に、運動計算部31は、上記受信した操作情報により操作の内容を把握し、当該操作によって仮想空間内の移動体100の状態がどのように変化するかを演算する(ステップS2)。その結果、少なくとも、移動体100の仮想空間内での位置情報、移動体100の移動速度情報、移動体100の移動方向情報を含む運動状態情報が生成される。また、移動体100の位置に基づいて仮想空間内の他のオブジェクトとの干渉等についてもチェックがなされる。
【0035】
次に、通常視界画像生成部331が、上記生成された運動状態情報に基づいて、データ格納部6に格納されるデータを用い、通常視界画像を生成する(ステップS3)。すなわち、上述した前方視界画像と各ミラーを用いて見た時の画像を生成する。
【0036】
図5は、画像生成部33が生成する3画面モニタ用の画像を例示した図である。また、図6は、画像生成部33が生成する1画面モニタ用の画像を例示した図である。また、図7は、3画面モニタ用の画像の視点と視界を例示した図である。また、図8は、1画面モニタ用の画像の視点と視界を例示した図である。
【0037】
3画面のモニタを用いる場合の前方視界画像600は、例えば、図5に示される600(L)、600(C)、及び600(R)である。この場合には、前方視界画像600が、左側モニタ21、中央モニタ22、及び右側モニタ23のそれぞれに合わせて、3分割されている。また、1画面のモニタの場合には、例えば、図6に示される前方視界画像900のようになる。
【0038】
また、上記前方視界画像600(L)、600(C)、及び600(R)は、それぞれ、図7に示す視点400からの視界500(L)、500(C)、及び500(R)による画像である。言い換えれば、視点400の位置に仮想カメラを置いてそれぞれの視界を捉えた際の仮想空間内での模擬画像である。同様に、上記前方視界画像900は、図8に示す視点700からの視界800による画像である。
【0039】
なお、視点400、700の位置は、移動体100の運転席101の位置に相当する。
【0040】
次に、サイドミラーを用いて見える画像は、3画面モニタでは、例えば、図5の右サイドミラー画像603及び左サイドミラー画像604であり、1画面モニタでは、例えば、図6の右サイドミラー画像903及び左サイドミラー画像904である。
【0041】
これらサイドミラー画像のそれぞれの視点(仮想カメラの位置)とその視界は、それぞれ、図7の視点403及び404、視界503及び504、並びに、図8の視点703及び704、視界803及び804である。
【0042】
また、バックミラーを用いて見える画像は、3画面モニタでは、例えば、図5のバックミラー画像605であり、1画面モニタでは、例えば、図6のバックミラー画像905である。これらバックミラー画像のそれぞれの視点(仮想カメラの位置)とその視界は、それぞれ、図7の視点405及び視界505、並びに、図8の視点705及び視界805である。
【0043】
なお、上記ミラーを用いた場合に見える画像の実際の視点は400と700である。
【0044】
次に、制御部3の表示判定部32は、上述した他視界画像をこの時点で表示するか否かの判定を行う(ステップS4)。当該判定が本運転模擬装置1の大きな特徴である。
【0045】
当該判定では、移動体の運転者(運転模擬装置1の操作者)が、首を振るなどして視線を前方からはずす、本運転模擬装置1のように教習用の場合には視線をはずすべき、状況であるか否かを判断する。言い換えれば、前方以外の方向をミラーを用いずに見る状況であるか否かを判断する。
【0046】
具体的には、当該状況になったか否かを、少なくとも、その時点の移動体100の運動状態に基づいて、より具体的には、上記運動計算(S2)で生成された運動状態情報を用いて判断する。また、以下に具体例として説明するように、上記運動状態と、その時点の操作部4の状態、すなわち、上記操作情報に基づいて判断しても良いし、その時点の操作者の視線方向、すなわち、上記動作情報に基づいて判断しても良い。
【0047】
上記判断する状況は、例えば、交差点において左折又は右折をする状況、停止している状態から発進する状況、車線を変更する状況、交差点を通過する状況などである。
【0048】
本運転模擬装置1では、これらの状況を判断するための条件が設けられており、表示判定部32は、具体的には、当該条件を満たしているか否かを判定する処理を行う。当該条件と具体的な判定については後述する。
【0049】
なお、通常の場合は、当該表示判定部32による判定は、上記生成された通常視界画像を常に表示するものとして、他視界画像の表示・非表示について判定するが、判断された上記状況によっては、通常視界画像を表示せずに他視界画像のみを表示するという判定を行っても良い。
【0050】
また、上記他視界画像のモニタ上の表示位置(表示領域)は、固定にしても良いし可変にしてもよい。可変にする場合には、当該表示判定部32が判断した上記状況に応じて表示位置を決定する。
【0051】
かかる判定の結果、表示判定部32が上記条件を満たしている、すなわち、他視界画像を表示すべきと判定した場合には(ステップS4のYes)、他視界画像生成部332が他視界画像を生成する(ステップS5)。一方、上記条件を満たしていない場合には(ステップS4のNo)、処理がステップS6に移行する。
【0052】
他視界画像生成部332による生成が行われる場合には、上記判断されたその時点の状況に相応しい視線方向の視界画像を、上記その時点の運動状態情報に基づいてデータ格納部6に格納されるデータを用い生成する。具体的状況とそれに相応する視点及び視界については後述する。
【0053】
次に、ステップS6では、画像合成部34が画像の合成処理を行う。具体的には、上記生成された通常視界画像の上述した前方視界画像とミラーを用いてみた画像を、例えば、図5及び図6に示すような配置で合成し、さらに、上記判定(S4)により他視界画像を表示する場合には、生成された他視界画像をさらに合成する。
【0054】
3画面モニタの場合には、例えば、図5に示す画像601及び602が他視界画像であり、1画面モニタの場合には、例えば、図6に示す画像901及び902が他視界画像である。これらの図に示すように、一例としては、モニタの左側と右側の比較的小さい領域に(小窓のように)表示されるように、他視界画像が通常視界画像に合成される。
【0055】
また、左右の他視界画像は、その時点の状況に応じて、片方のみを表示したり両方を表示したりすることができる。さらに、上述のとおり、他視界画像のみをモニタに表示するように画像の合成を行ってもよい。また、図5及び図6に示す他視界画像の大きさは一例であり、その時点の状況に応じて可変にするようにしてもよい。
【0056】
次に、当該合成された画像を、表示制御部35がモニタ(表示部2)に表示させる(ステップS7)。この際、表示制御部35は、モニタに移動体100のダッシュボードを表示する場合には、当該ダッシュボード上のメータユニットに表示するデータを上記運転状態情報や操作情報から取得して、上記画像に合成して表示する。例えば、その時点の移動体100の移動速度や方向指示器のオン・オフの状態が合成される。
【0057】
当該表示処理が終了すると、当該1サイクルの処理が終了し、制御部3は、現在行っている模擬運転を終了するか否かの終了判定を行う(ステップS8)。具体的には、当該模擬運転の用意されたカリキュラムが全て終了した場合、あるいは、移動体100(仮想自動車)が通行人や障害物に接触した場合などに終了であると判定される(ステップS8のYes)。また、終了と判定されない場合には(ステップS8のNo)、次のサイクルの処理が上述したステップS1から開始される。
【0058】
そして、上記終了判定がなされれば、当該模擬運転の処理が終了する。
【0059】
次に、上述した他視界画像を表示するか否かの判定及び他視界画像の視界について、具体的な例を説明する。まず、一例として、表示判定部32は、仮想空間内の移動体100が交差点での右左折を行う状況であると判断した場合に、他視界画像の表示を行うと判定する。図9は、かかる場合の状況を説明するための図である。そして、この場合の判定条件は、以下の三つである。
条件(1):仮想空間内の移動体100の現在位置が交差点領域(図9の領域102、例えば、交差点の中心位置から進行方向前後及び左右に30m以内の領域)内であること
条件(2):仮想空間内の移動体100の移動速度が時速0km以上時速15km以下であること
条件(3):操作部4の方向指示器スイッチレバーが左方向又は右方向を指示させる状態である(オンであること)
上記条件(1)及び(2)は、上述したように移動体100の運動状態情報から満足するか否かが判断され、上記条件(3)については、上述した操作情報から満足するか否かが判断される。その結果、全ての条件が満たされている場合に、他視界画像の表示を行うと判定する。
【0060】
そして、この場合に生成、表示される他視界画像は以下の視点と視界によって生成されるものである。
視点位置:移動体100の運転席101(具体的には、運転者の頭部位置)
視界方向:移動体100の進行方向から左又は右に70度の方向
視界角度:45度
なお、方向指示器スイッチレバーが左方向を指示させる状態であれば(すなわち、左折中の状況であると判断されれば)、上記視界方向は左に70度の方向であり、方向指示器スイッチレバーが右方向を指示させる状態であれば(すなわち、右折中の状況であると判断されれば)、上記視界方向は右に70度の方向である。
【0061】
図9には、左折時の視点402、702と視界502、802、及び、右折時の視点401、701と視界501、801が例示されている。
【0062】
次の例として、表示判定部32は、仮想空間内の移動体100が停止状態から発進する状況であると判断した場合に、他視界画像の表示を行うと判定する。図10は、かかる場合の状況を説明するための図である。そして、この場合の判定条件は、以下の三つである。
条件(4):仮想空間内の移動体100の現在位置が停止領域(図10の領域103、例えば、最初の発進位置など教習カリキュラムの停止すべき位置を含む領域)内であること
条件(5):仮想空間内の移動体100の移動速度が時速0kmであること
条件(6):操作部4の方向指示器スイッチレバーが左方向又は右方向を指示させる状態である(オンであること)
上記条件(4)及び(5)は、上述したように運動状態情報から満足するか否かが判断され、上記条件(6)については、上述した操作情報から満足するか否かが判断される。その結果、全ての条件が満たされている場合に、他視界画像の表示を行うと判定する。
【0063】
そして、この場合に生成、表示される他視界画像は以下の視点と視界によって生成されるものである。
視点位置:移動体100の運転席101(具体的には、運転者の頭部位置)
視界方向:移動体100の進行方向から左又は右に135度の方向
視界角度:45度
なお、方向指示器スイッチレバーが左方向を指示させる状態であれば(すなわち、左側に発進する状況であると判断されれば)、上記視界方向は左に135度の方向であり、方向指示器スイッチレバーが右方向を指示させる状態であれば(すなわち、右側に発進する状況であると判断されれば)、上記視界方向は右に135度の方向である。
【0064】
図10には、左側発進時の視点402、702と視界502、802、及び、右側発進時の視点401、701と視界501、801が例示されている。
【0065】
また、別の例として、表示判定部32は、仮想空間内の移動体100が車線変更をする状況であると判断した場合に、他視界画像の表示を行うと判定する。この場合の判定条件は、以下の通りである。
条件(7):仮想空間内の移動体100の移動速度が時速30km以上であること
条件(8):操作部4の方向指示器スイッチレバーが左方向又は右方向を指示させる状態である(オンであること)
そして、この場合に生成、表示される他視界画像は、以下の視点と視界によって生成されるものである。
視点位置:移動体100の運転席101(具体的には、運転者の頭部位置)
視界方向:移動体100の進行方向から左又は右に135度の方向
視界角度:45度
なお、移動体100の車線変更可能領域を設けて、移動体100の位置がその領域内であるか否かを条件として加えてもよい。
【0066】
また、上記運転状態情報だけの条件で判定する例として、交差点を直進する状況である場合に他視界画像の表示を行うと判定する。かかる場合には、例えば、移動体100が上記交差点領域内に位置し、所定の速度以下で移動中である、という判定条件が用いられる。そして、その条件が満足された場合には、移動体100の進行方向に対して左右を運転者が目視した場合の画像が生成されて表示される。
【0067】
以上説明したように、本運転模擬装置1では、運転者が視線を向けて目視である方向の状態を確認すべき状況を捉えて、その状況で運転者が目視で見た場合の画像を提供する。
【0068】
なお、上述の例などにおいて、運転者が左側を見た場合の他視界画像は、図5及び図6の画像602及び画像902のように、モニタの左側に表示され、運転者が右側を見た場合の他視界画像は、図5及び図6の画像601及び画像901のように、モニタの右側に表示される。
【0069】
また、以上の具体的説明では、他視界画像の表示を行うか否かの判定を上記運転状態情報と上記操作情報に基づいて行った場合であったが、上述したように上記動作情報に基づいて行ってもよい。具体的には、センサ7が検出する操作者の視線方向が前方でない方向であること、より具体的には、左側又は右側の所定範囲内の方向であることを、上記判定の条件に加えるようにしてもよい。
【0070】
例えば、上述した交差点の右左折時や発進時の条件に上記視線方向の条件を加えるようにすることができる。かかる場合には、操作者が実際に首を振って確認行為を行った場合にのみ他視界画像が提供されるので、より現実に近い状態にすることができる。なお、この場合には、提供する画像を上記検出された視線方向で得られる視界の画像とするようにしてもよい。
【0071】
また、上記検出した視線方向の条件のみを判定条件としてもよい。この場合には、操作者が、視線を前方からある一定程度以上ずらした場合に、その方向の視界の画像が生成されて表示されるようになる。
【0072】
また、上述の説明では、各ミラーを用いて見た画像は通常前方視界画像に合成されて、通常、表示されるものとしたが、当該ミラー画像も、運転者がミラーを見るべき状況を判定して、又は、操作者が視線を変えてミラー方向を見たことを検出して、かかる状況である場合にのみ表示するようにしてもよい。
【0073】
また、本運転模擬装置1では、上述したような他視界画像の表示を実行可能なモードと、実行可能でないモード、すなわち、通常視界画像のみを表示するモードを切り換えて設定可能にするようにすることができる。後者のモードでは、図4のステップS4及びS5が省かれた処理が行なわれ、一連の模擬運転が終了するまで他視界画像は表示されない。
【0074】
なお、本運転模擬装置1を教習所等で用いる場合には、複数の当該装置1と一つの管理用装置をネットワークで接続した構成とすることができる。この場合、当該管理用装置は、データ処理部やモニタ等を備え、各運転模擬装置1の教習用コース及び上記モードの設定や操作状態及び運転状態の監視ができる機能を有する。
【0075】
以上説明したように、本実施の形態例に係る運転模擬装置1では、運転者が前方以外の方向を目視で確認する状況、確認すべき状況を、少なくとも、模擬運転される車両の運動状態に基づいて捉え、その場合に、当該確認によって見られる画像を提供するので、従来よりも実際の運転に近い状態を実現でき、教習の効果を向上させることができる。
【0076】
また、上記目視確認を必要とする状況は、模擬運転に必要な模擬画像の生成のために計算される車両の運動状態や運転者の操作内容による条件で設定できるので、より現実に近い様々な運転状況を模擬することができるようになる。
【0077】
また、上述したように、他視界画像を表示しないモードを設定可能とすることにより、両モードの模擬運転を通じて、教習を受ける者に対して目視確認の必要性をより強く認識させることができる。
【0078】
なお、本実施の形態例では、運転模擬装置を自動車の教習用装置として説明したが、本発明は、運転が必要な他の乗り物の教習用装置やゲーム機としての模擬装置に適用することもできる。
【0079】
本発明の保護範囲は、上記の実施の形態に限定されず、特許請求の範囲に記載された発明とその均等物に及ぶものである。
【符号の説明】
【0080】
1 運転模擬装置
2 表示部(表示手段)
3 制御部(制御手段)
4 操作部(操作手段)
5 スピーカー
6 データ格納部
7 センサ(検出手段)
21 左側モニタ
22 中央モニタ
23 右側モニタ
31 運動計算部
32 表示判定部
33 画像生成部
34 画像合成部
35 表示制御部
40 ハンドルユニット
41 ステアリングホイール
42 ハンドブレーキ
43 チェンジレバー
44 コンビネーションスイッチ
45 コンビネーションメータユニット
46 座席
71 カメラ
100 移動体
101 運転席
102 交差点領域
103 発進領域
331 通常視界画像生成部
332 他視界画像生成部
400−405 視点(仮想カメラ)
500−505 視界
600−605 画像
700−705 視点(仮想カメラ)
800−805 視界
900−905 画像
【特許請求の範囲】
【請求項1】
操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置であって、
前記模擬画像を表示する表示手段と、
前記操作者の操作の状態を示す操作情報を生成する操作手段と、
前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示手段に表示させる制御手段と、を有し、
前記制御手段は、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示手段に表示させる
ことを特徴とする運転模擬装置。
【請求項2】
請求項1において、
前記制御手段は、当該移動体の位置が前記仮想空間内の所定領域に入っていることを前記所定の条件とする
ことを特徴とする運転模擬装置。
【請求項3】
請求項1乃至2のいずれかにおいて、
前記制御手段は、当該移動体の移動速度が所定範囲に入っていることを前記所定の条件とする
ことを特徴とする運転模擬装置。
【請求項4】
請求項1乃至3のいずれかにおいて、
前記制御手段は、所定の前記操作情報が生成されたことに応じて前記他視界模擬画像を前記表示手段に表示させる
ことを特徴とする運転模擬装置。
【請求項5】
請求項4において、
前記所定の操作情報は、前記操作手段が備える方向指示器スイッチレバーがオンであることを示す情報である
ことを特徴とする運転模擬装置。
【請求項6】
請求項1乃至3のいずれかにおいて、
更に、前記操作者の視線の方向を検出する検出手段を有し、
前記制御手段は、前記検出手段が前記視線の方向が前方をはずれたことを検出したことに応じて前記他視界模擬画像を前記表示手段に表示させる
ことを特徴とする運転模擬装置。
【請求項7】
操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置用の制御プログラムであって、
前記運転模擬装置には、前記模擬画像を表示する表示部と、前記操作者の操作の状態を示す操作情報を生成する操作部と、制御部とが備えられ、
前記制御部に、
前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示ぶに表示させる、処理を実行させ、
前記制御部に、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示部に表示させる、処理を実行させる
ことを特徴とする運転模擬装置用の制御プログラム。
【請求項1】
操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置であって、
前記模擬画像を表示する表示手段と、
前記操作者の操作の状態を示す操作情報を生成する操作手段と、
前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示手段に表示させる制御手段と、を有し、
前記制御手段は、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示手段に表示させる
ことを特徴とする運転模擬装置。
【請求項2】
請求項1において、
前記制御手段は、当該移動体の位置が前記仮想空間内の所定領域に入っていることを前記所定の条件とする
ことを特徴とする運転模擬装置。
【請求項3】
請求項1乃至2のいずれかにおいて、
前記制御手段は、当該移動体の移動速度が所定範囲に入っていることを前記所定の条件とする
ことを特徴とする運転模擬装置。
【請求項4】
請求項1乃至3のいずれかにおいて、
前記制御手段は、所定の前記操作情報が生成されたことに応じて前記他視界模擬画像を前記表示手段に表示させる
ことを特徴とする運転模擬装置。
【請求項5】
請求項4において、
前記所定の操作情報は、前記操作手段が備える方向指示器スイッチレバーがオンであることを示す情報である
ことを特徴とする運転模擬装置。
【請求項6】
請求項1乃至3のいずれかにおいて、
更に、前記操作者の視線の方向を検出する検出手段を有し、
前記制御手段は、前記検出手段が前記視線の方向が前方をはずれたことを検出したことに応じて前記他視界模擬画像を前記表示手段に表示させる
ことを特徴とする運転模擬装置。
【請求項7】
操作者の操作に応答して運転席からの視界の模擬画像を表示し、当該操作者に模擬運転を体験させる運転模擬装置用の制御プログラムであって、
前記運転模擬装置には、前記模擬画像を表示する表示部と、前記操作者の操作の状態を示す操作情報を生成する操作部と、制御部とが備えられ、
前記制御部に、
前記操作情報と予め用意された仮想空間を表現するデータに基づいて、前記操作者の操作によって運転される前記仮想空間内の移動体の運動状態を求め、当該求めた運動状態を表す運動状態情報と前記仮想空間を表現するデータに基づいて、前記移動体における前方についての前記模擬画像である前方視界模擬画像を生成して前記表示ぶに表示させる、処理を実行させ、
前記制御部に、前記運動状態情報である、前記移動体の位置、前記移動体の移動速度、及び、前記移動体の移動方向のうちの何れかが所定の条件を満たす場合に、前記移動体の前方以外の方向についての前記模擬画像である他視界模擬画像を生成し、当該他視界模擬画像を前記前方視界模擬画像内の一部の領域に合成して、前記表示部に表示させる、処理を実行させる
ことを特徴とする運転模擬装置用の制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図7】
【図8】
【図9】
【図10】
【図5】
【図6】
【図2】
【図3】
【図4】
【図7】
【図8】
【図9】
【図10】
【図5】
【図6】
【公開番号】特開2012−48105(P2012−48105A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−191968(P2010−191968)
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000132471)株式会社セガ (811)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000132471)株式会社セガ (811)
【Fターム(参考)】
[ Back to top ]