
運転特性特定装置および経路探索装置
【課題】ドライバの運転特性を精度良く特定することを可能にする。
【解決手段】自車両が発進してから停止するまでの区間であるGO−STOP区間単位での自車両の速度や加減速度に関連する情報をもとに、ドライバの運転特性を特定することにより、一旦停止箇所や信号等の自車両の運行を規制する運行規制要因による停車時間における情報を排除した情報をもとに、ドライバの運転特性を精度良く特定する。
【解決手段】自車両が発進してから停止するまでの区間であるGO−STOP区間単位での自車両の速度や加減速度に関連する情報をもとに、ドライバの運転特性を特定することにより、一旦停止箇所や信号等の自車両の運行を規制する運行規制要因による停車時間における情報を排除した情報をもとに、ドライバの運転特性を精度良く特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転特性特定装置および経路探索装置に関するものである。
【背景技術】
【0002】
従来から、ドライバの運転の癖(以下、運転特性)を特定し、その運転特性に応じた経路を提供する技術が知られている。
【0003】
例えば、特許文献1には、地図データのリンクごとにアクセルセンサ、ブレーキセンサ、車速センサ等の各種センサから運転情報を収集し、収集したこの運転情報に基づき、評価対象のリンクにおけるユーザの運転特性を特定する技術が開示されている。そして、特定した運転特性に応じた燃料コストを算出し、燃料コストの合計が最小となる経路を探索する技術が開示されている。
【0004】
また、特許文献2には、1Km走行などの予め決められた単位区間分だけ、速度などの車両情報を含む運転状況情報と燃費情報を取得し、既に格納されている過去の運転状況パターンの中から相関の高い運転状況パターンを求めるとともに、その運転状況パターンに対応する燃費頻度分布データを更新する技術が開示されている。そして、運転状況パターンに対応する燃費頻度分布データを燃費計算や経路探索のコスト計算に利用することが開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−107155号公報
【特許文献2】特開2009−31046号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1や特許文献2に開示の技術のように、リンクや所定距離の区間ごとの運転情報から運転特性を特定しようとすると、ドライバごとの運転特性を精度良く特定することができないという問題点があった。
【0007】
詳しくは、以下の通りである。まず、個々のリンクや所定距離の区間の間には、一旦停止箇所や信号等の車両の運行を規制する要因(以下、運行規制要因)の存在にばらつきがある。よって、上記運行規制要因の存在によって、個々のリンクや所定距離の区間の間で車両の速度や加減速度に関連する運転情報にばらつきが生じてしまう。また、同一のリンクや区間であっても、信号が赤信号か青信号かといったように時間帯によって車両の運行を規制する要因に変化があるため、この点でも個々のリンクや所定距離の区間の間で車両の速度や加減速度に関連する運転情報にばらつきが生じてしまう。従って、リンク単位や所定距離の区間単位の運転情報から運転特性を特定しようとしても、ドライバごとの運転特性を精度良く特定することはできない。
【0008】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、ドライバの運転特性を精度良く特定することを可能にする運転特性特定装置および経路探索装置を提供することにある。
【課題を解決するための手段】
【0009】
請求項1の運転特性特定装置によれば、運転特性特定手段が、車両が発進してから停止するまでの区間である走行区間単位での車両の速度、加速度、および減速度のうちの少なくともいずれかに関連する情報である速さ関連情報をもとに、ドライバの運転特性を特定することになる。
【0010】
走行区間は、車両が発進してから停止するまでの区間であるので、走行区間単位での速さ関連情報は、停車中の速さ関連情報を含まない。従って、走行区間単位での速さ関連情報をもとにドライバの運転特性を特定すれば、一旦停止箇所や信号等の車両の運行を規制する要因(以下、運行規制要因)によって生じた停車時間における速さ関連情報を含まない速さ関連情報をもとに、ドライバの運転特性を特定することができるので、運行規制要因の影響を受けずに、ドライバの運転特性を精度良く特定することが可能になる。
【0011】
また、請求項2のように、運転特性特定手段が、走行区間単位での速さ関連情報をもとに、ドライバの運転傾向を複数種類のパターンに分けることによって、ドライバの運転特性を特定する態様としてもよい。
【0012】
また、請求項3のように、運転特性特定手段が、ドライバの運転特性を車両の速度および加減速度がより大きくなる傾向にある走り屋パターン、速度および加減速度がより小さくなる傾向にあるエコドライバパターン、前記走り屋パターンと前記エコドライバパターンの中間の傾向にある普通パターンの3種類のパターンのうちのいずれかに特定する態様としてもよい。
【0013】
また、請求項4のように、速さ関連情報が、少なくとも車両の加速度に関連する情報であって、運転特性特定手段が、少なくとも走行区間単位での車両の加速度に関連する情報をもとに、ドライバの運転特性を特定する態様としてもよい。車両の加速度に関連する情報に、ドライバごとの違いがより顕著に出易いことを本発明者は見出したため、請求項4のように、少なくとも走行区間単位での車両の加速度に関連する情報をもとにドライバの運転特性を特定すれば、ドライバの運転特性をより確実に精度良く特定することができる。
【0014】
また、請求項5のように、速さ関連情報が、車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度であって、運転特性特定手段が、走行区間単位での車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度をもとに、ドライバの運転特性を特定する態様としてもよい。
【0015】
車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度に、ドライバごとの違いが非常に顕著に出ることを本発明者は見出したため、請求項5のように、走行区間単位での車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度をもとにドライバの運転特性を特定すれば、ドライバの運転特性を非常に精度良く特定することができる。
【0016】
また、請求項6の構成によれば、走行区間における運転情報取得手段で取得した運転情報をもとに、当該走行区間における複数種類の速さ関連情報のうちの、運転特性特定手段での運転特性の特定に適していないと第1適否判定手段で判定した種類の当該走行区間における速さ関連情報については、運転特性特定手段での運転特性の特定に用いないことになる。よって、運転特性の特定に適していないデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0017】
また、運転特性特定手段が、複数の走行区間における速さ関連情報をもとにドライバの運転傾向の学習を行って、ドライバの運転傾向を複数種類のパターンに分けることによってドライバの運転特性を特定するものであって、請求項6のようにする場合には、請求項7のように、第1適否判定手段で運転特性の特定に適していないと判定した種類の速さ関連情報を除いた残りの走行区間における速さ関連情報については、学習時の重みを下げて学習を行うことが好ましい。
【0018】
上記学習を多くの速さ関連情報について行うほど運転特性の特定の精度は上がるが、運転特性の特定に適していないデータを除いた速さ関連情報については、運転特性の特定に適していないデータを最初から含まない速さ関連情報に比べ、利用することのできるデータが少ない分だけ、運転特性の特定の精度が劣る可能性がある。これに対して、請求項7の構成によれば、運転特性の特定に適していないデータを除いた速さ関連情報については、学習時の重みを下げて学習を行うので、運転特性の特定の精度の低下を抑えながら、運転特性の特定の精度を向上させることが可能になる。よって、ドライバの運転特性を非常に精度良く特定することが可能になる。
【0019】
また、請求項6のようにする場合には、請求項8のように、走行区間における運転情報取得手段で取得した操作情報(車両の速度変化に影響する運転操作に関する情報)をもとに、ドライバの運転特性が出にくい状況で行われる運転操作が行われたと判別した場合に、当該走行区間におけるその運転操作に対応する速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0020】
他にも、請求項9のように、走行区間における運転情報取得手段で取得した複数種類の速さ関連情報を、ドライバの運転特性が出にくい状況における速さ関連情報を判別する指標となる値である第1規定値と比較し、複数種類の速さ関連情報のうち第1規定値を満たさない速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0021】
さらに、請求項10のように、走行区間における運転情報取得手段で取得した複数種類の速さ関連情報を、運転特性の特定に適しているか否かを判別するため速さ関連情報の基準となる値である基準値と比較し、複数種類の速さ関連情報のうち基準値からの乖離度が所定量以上の速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0022】
また、請求項11の構成によれば、走行区間における運転情報取得手段で取得した運転情報をもとに、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと第2適否判定手段で判定した走行区間における速さ関連情報の全てについては、運転特性特定手段での運転特性の特定に用いないことになる。よって、運転特性の特定に適していないデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0023】
また、請求項11のようにする場合には、請求項12のように、走行区間における運転情報取得手段で取得した速さ関連情報を、ドライバの運転特性が出にくい状況における速さ関連情報を判別する指標となる値である第2規定値と比較し、速さ関連情報が第2規定値を満たさなかった場合に、当該走行区間における速さ関連情報の全てについて、運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0024】
また、請求項13の構成によれば、走行区間における道路情報取得手段で取得した道路情報をもとに、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと第3適否判定手段で判定した走行区間における速さ関連情報については、運転特性特定手段での運転特性の特定に用いないことになる。よって、運転特性の特定に適していないデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0025】
また、請求項13のようにする場合には、請求項14のように、走行区間における道路情報取得手段で取得した道路の勾配の情報をもとに、車両の走行中の道路の勾配が所定値以上であった場合に、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0026】
他にも、請求項15のように、走行区間における道路情報取得手段で取得した道路種別の情報をもとに、車両の走行中の道路が細街路であった場合に、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0027】
また、請求項16の経路探索装置によれば、前述のいずれかの運転特性特定装置で精度良く特定したドライバの運転特性に応じたコストを地図データの各リンクおよびノードに付与して、目的地に至る経路のうち、各リンクおよびノードに付与されたコストの合計が最小となる推奨経路を探索するので、ドライバの運転特性に応じた推奨経路を正確に探索することが可能となる。
【0028】
また、車両の速度および加速度がより大きくなる傾向にある走り屋パターンに運転傾向が該当するドライバは、前述のエコドライバパターンや普通パターンに運転傾向が該当するドライバに比べ、運行規制要因による車両の停止が大きなストレスとなり易いと考えられる。これに対して、請求項17の構成によれば、運転特性特定手段で特定したドライバの運転特性が走り屋パターンであった場合には、車両の停止回数がより少なくなる推奨経路を探索するので、走り屋パターンに運転傾向が該当するドライバのストレスを軽減することが可能になる。
【0029】
また、請求項17のように、車両の停止回数がより少なくなる推奨経路を探索する場合には、請求項18のように、信号交差点の数が多いリンクのコスト、一旦停止が存在するノードのコスト、一旦停止を含むリンクのコスト、および右左折する交差点のノードのコストのうちの少なくともいずれかを上げることによって、車両の停止回数がより少なくなる推奨経路を探索することが好ましい。
【0030】
さらに、前述の走り屋パターンに運転傾向が該当するドライバは、前述のエコドライバパターンや普通パターンに運転傾向が該当するドライバに比べ、渋滞による車両の停止や低速走行が大きなストレスとなり易いと考えられる。これに対して、請求項19の構成によれば、運転特性特定手段で特定したドライバの運転特性が走り屋パターンであった場合には、車両が渋滞箇所を通過する回数がより少なくなる推奨経路を探索するので、走り屋パターンに運転傾向が該当するドライバのストレスを軽減することが可能になる。
【0031】
また、請求項19のように、車両が渋滞箇所を通過する回数がより少なくなる推奨経路を探索する場合には、請求項20のように、渋滞箇所を含むリンクのコストを上げることによって、車両が渋滞箇所を通過する回数がより少なくなる推奨経路を探索することが好ましい。
【図面の簡単な説明】
【0032】
【図1】経路案内システム100の概略的な構成を示すブロック図である。
【図2】経路案内サーバ装置2の概略的な構成を示すブロック図である。
【図3】ナビゲーション装置3の概略的な構成を示すブロック図である。
【図4】制御部46での運転特性特定処理に関連する処理のフローの一例を示すフローチャートである。
【図5】有効データ判別処理のフローの一例を示すフローチャートである。
【図6】運転特性特定処理のフローの一例を示すフローチャートである。
【図7】フィッティングの一例を説明するための模式図である。
【図8】ドライバの運転する車両の速度の実測値の時間変化を示す図である。
【図9】ナビゲーション装置3の制御部46での経路案内関連処理のフローの一例を示すフローチャートである。
【図10】経路案内サーバ装置2の制御部24での経路探索に関連する処理のフローの一例を示すフローチャートである
【図11】経路探索処理のフローの一例を示すフローチャートである。
【図12】(a)〜(c)は、運転特性に応じたコスト定数の決定の一例を説明するための表である。
【図13】コスト定数と特性値との関係を示すグラフである。
【図14】各種の運転状況における自車両の速度変化を示す模式図である。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された経路案内システム100の概略的な構成を示すブロック図である。図1に示す経路案内システム100は、VICS(登録商標)センタ1、経路案内サーバ装置2、および車両に搭載されたナビゲーション装置3を含んでいる。なお、ナビゲーション装置3を搭載している車両を以降では自車両と呼ぶ。また、経路案内システム100が請求項の経路探索装置に相当する。
【0034】
VICSセンタ1は、渋滞箇所の情報、渋滞の度合いを示す渋滞度の情報、通行に要する時間を示す区間所要時間の情報、事故や工事などによる通行止め等の交通障害の情報、通行止めや臨時規制などの交通規制の情報等の道路交通情報を都道府県警察や道路管理者等から収集し、これらの道路交通情報を、ネットワークならびに道路に敷設されたビーコンや各地のFM放送局を介して配信するものである。なお、VICSセンタ1としては、周知のVICSセンタを用いる構成とすればよい。
【0035】
経路案内サーバ装置2は、サーバから構成されており、ネットワーク等の通信網を介してナビゲーション装置3から送信されてくる現在位置、目的地、および運転特性等の各種情報をもとに、目的地に達する最適な経路である推奨経路を探索し、探索結果(つまり、案内経路)をナビゲーション装置3に返信するものである。なお、経路案内サーバ装置2は、1つのサーバからなるものであってもよいし、複数のサーバからなっているものであってもよい。
【0036】
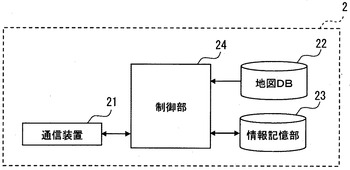
ここで、図2を用いて経路案内サーバ装置2の概略的な構成について説明を行う。図2は、経路案内サーバ装置2の概略的な構成を示すブロック図である。図2に示すように、経路案内サーバ装置2は、通信装置21、地図データベース(DB)22、情報記憶部23、および制御部24を備えている。
【0037】
通信装置21は、ネットワーク等の通信網を介してVICSセンタ1やナビゲーション装置3と通信を行うものである。例えば、通信装置21は、ナビゲーション装置3から送信されてくる現在位置、目的地、およびドライバ特性の情報を受信して制御部24に送る。また、通信装置21は、VICSセンタ1から送信されてくる道路交通情報を受信し、制御部24に送る。さらに、通信装置21は、制御部24から送られてくる案内経路の情報をナビゲーション装置3に送信する。
【0038】
なお、本実施形態では、通信装置21が通信網を介してVICSセンタ1やナビゲーション装置3との間で通信を行う構成を示したが、必ずしもこれに限らず、通信網を介さずにVICSセンタ1やナビゲーション装置3との間で通信を行う構成としてもよい。
【0039】
地図DB22は、地図データを格納しているデータベースであって、地図データには、少なくとも道路データが含まれる。また、道路データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。
【0040】
リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの形状情報、リンクの始端および終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、道路の勾配、および制限速度等の各データから構成される。
【0041】
一方、ノードデータは、地図上のノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0042】
情報記憶部23は、通信装置21を介して制御部24がVICSセンタ1から受信した道路交通情報やナビゲーション装置3から受信した現在位置、目的地、および運転特性の情報を格納しておくものである。
【0043】
制御部24は、通常のコンピュータとして構成されており、内部には周知のCPU、ROMやRAMなどのメモリ、I/O及びこれらの構成を接続するバスライン(いずれも図示せず)が備えられている。制御部24は、通信装置21、地図DB22、情報記憶部23から入力された各種情報に基づき、コスト決定処理および経路探索実行処理といった経路探索処理等を実行する。また、制御部24は、経路探索実行処理で得られた案内経路の情報を通信装置21からナビゲーション装置3へ送信させる処理を行う。
【0044】
例えば、コスト決定処理においては、制御部24が、通信装置21を介してナビゲーション装置3から得た運転特性の情報をもとに、運転特性に応じて、周知のダイクストラ法によるコスト計算におけるリンクコストやノードコスト(以下、コスト定数)を決定する。
【0045】
さらに、経路探索実行処理においては、制御部24は、通信装置21を介してナビゲーション装置3から得た現在位置および目的地の情報、ならびに地図DB22に格納されている地図データをもとに、目的地に達する最適な経路である推奨経路を探索する。また、経路探索実行処理においては、上記コスト決定処理で決定されたコスト定数を用いて周知のダイクストラ法によるコスト計算を行い、推奨経路を探索するものとする。なお、経路案内サーバ装置2でのコスト決定処理および経路探索実行処理の詳細については後述する。
【0046】
また、本実施形態では、経路案内サーバ装置2が道路交通情報源としてVICSセンタ1を用いる構成を示したが、必ずしもこれに限らない。例えば、VICSセンタ1以外の情報センタや車両に搭載された端末機を道路交通情報源として用い、道路交通情報を取得する構成としてもよい。
【0047】
ナビゲーション装置3は、前述したように車両に搭載されるものであって、経路探索や経路案内等のナビゲーション機能を有している。ここで、図3を用いてナビゲーション装置3の概略的な構成について説明を行う。図3は、ナビゲーション装置3の概略的な構成を示すブロック図である。図3に示すようにナビゲーション装置3は、位置検出器31、地図データ入力器36、記憶媒体37、外部メモリ38、表示装置39、音声出力装置40、操作スイッチ群41、リモートコントロール端末(以下リモコン)42、リモコンセンサ43、外部入力部44、通信装置45、および制御部46を備えている。
【0048】
位置検出器31は、自車両の加速度を検出する加速度センサ32、自車両の鉛直方向周りの角速度を検出するジャイロスコープ33、各転動輪の回転速度から自車両の速度を検出する車輪速センサ34、および人工衛星からの電波に基づいて自車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機35を有しており、定期的に自車両の現在位置の検出を行う。
【0049】
また、これらの各センサ32〜35は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、各センサの精度によっては位置検出器31を上述した内の一部で構成してもよく、さらに、図示しない地磁気センサ、ステアリングの回転センサ、車速センサ等を用いてもよい。
【0050】
地図データ入力器36は、記憶媒体37が装着され、その記憶媒体37に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。なお、記憶媒体37としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0051】
また、地図データには、前述した道路データ、背景データ、および文字データなどが含まれるものとする。例えば、背景データは、地図上の各施設や地形等と、それに対応する地図上の座標とを関連付けたデータである。なお、施設に関しては、各種施設の種類、名称、住所のデータなども含まれる。また、文字データは、地名、施設名、道路名等を地図上に表示するためのデータであって、その表示すべき位置に対応する座標データと関連付けられている。
【0052】
外部メモリ38は、書き込み可能なHDD等の大容量記憶装置である。外部メモリ38には大量のデータや電源をオフしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器36からコピーして利用したりする等の用途がある。なお、外部メモリ38は、比較的記憶容量の小さいリムーバブルなメモリであってもよい。
【0053】
表示装置39は、車両の走行を案内するための地図、および目的地選択画面等を表示するものであって、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。また、音声出力装置40は、スピーカ等から構成され、制御部46の指示に基づいて、経路案内時の案内音声等を出力する。
【0054】
操作スイッチ群41は、例えば表示装置39と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御部46へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。また、操作スイッチ群41は、出発地および目的地を設定するためのスイッチを含んでいる。そのスイッチを操作することによって、ユーザ(つまり、自車両の乗員)は、予め登録しておいた地点、施設名、電話番号、住所などから、出発地および目的地を設定することができる。
【0055】
リモコン42には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ43を介して各種指令信号を制御部46に入力することにより、操作スイッチ群41と同じ機能を制御部46に対して実行させることが可能である。
【0056】
外部入力部44は、車両の各種センサ群から車両の運転操作に関する情報(以下、操作情報)や車両の挙動に関する情報(以下、挙動情報)などの走行状況の情報(以下、走行状況情報)を制御部46が取得するためのインターフェースである。また、外部入力部44には、例えばCAN(controller areanetwork)などの通信プロトコルに準拠した車内LAN等から走行状況情報が入力されてくるものとすればよい。
【0057】
なお、操作情報としては、例えばアイドルスイッチから得られるアクセルペダルの操作のON/OFFの情報、アクセル開度センサから得られるアクセル開度の情報、スロットル開度センサから得られるスロットル開度の情報、エンジン回転数センサから得られるエンジン回転数の情報、ブレーキスイッチから得られるブレーキペダルの操作のON/OFFの情報、およびブレーキストロークセンサから得られるブレーキペダルの踏み込み量の情報などがある。また、挙動情報としては、加速度センサ32から得られる車両の加減速度の情報、および車輪速センサ34から得られる車両の速度の情報などがある。なお、走行状況情報が請求項の運転情報に相当する。
【0058】
通信装置45は、ネットワーク等の通信網を介して経路案内サーバ装置2との間で通信を行うものである。また、通信装置45は、無線通信を介してネットワークに接続するものとする。よって、例えば通信装置45は、通信モジュールを介してネットワークに接続する構成としてもよい。ここで言うところの通信モジュールとしては、例えば車両に搭載されるDCM(data communication module)等のテレマティクス通信に用いられる車載通信モジュールや例えばBluetooth(登録商標)等で接続した携帯電話機等がある。
【0059】
制御部46は通常のコンピュータとして構成されており、内部には周知のCPU、ROMやRAMなどのメモリ、I/O及びこれらの構成を接続するバスライン(いずれも図示せず)が備えられている。制御部46は、位置検出器31、地図データ入力器36、外部メモリ38、操作スイッチ群41、リモコンセンサ43、外部入力部44、通信装置45から入力された各種情報に基づき、ナビゲーション機能としての処理(例えば、地図縮尺変更処理、メニュー表示選択処理、マップマッチング処理、目的地設定処理、経路案内関連処理、現在位置修正処理、表示画面変更処理、音量調整処理等)や運転特性特定処理等を実行する。なお、制御部46が請求項の運転特性特定装置に相当する。
【0060】
例えば、運転特性特定処理では、外部入力部44を介して取得した走行状況情報や位置検出器31から入力される自車両の現在位置の情報や地図データ入力器36から入力される地図データをもとに、自車両を運転中のドライバの運転傾向(つまり、運転特性)を特定する。
【0061】
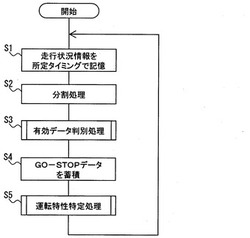
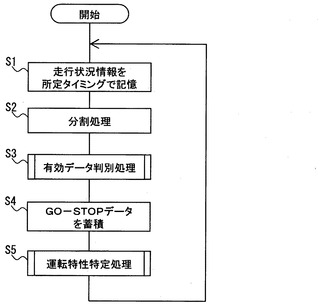
ここで、図4を用いて、制御部46での運転特性特定処理に関連する処理についての説明を行う。なお、図4は、制御部46での運転特性特定処理に関連する処理のフローの一例を示すフローチャートである。また、図4のフローは、例えば自車両のイグニッションスイッチがオンされたときに開始されるものとすればよい。
【0062】
まず、ステップS1では、制御部46が外部入力部44を介して取得した走行状況情報を所定タイミングで記憶し、ステップS2に移る。よって、制御部46は、請求項の運転情報取得手段に相当する。なお、制御部46が取得した走行状況情報については、制御部46のEEPROMやRAM等の書き換え可能なメモリに記憶する構成としてもよいし、外部メモリ38に記憶する構成としてもよい。また、ここで言うところの所定タイミングとは、予め定められた時間ごとや予め定められた走行距離ごとなどであって、任意に設定可能なものとする。
【0063】
なお、本実施形態では、少なくとも加速度センサ32から得られる自車両の加減速度の情報、および車輪速センサ34から得られる自車両の速度の情報が走行状況情報に含まれるものとして以降の説明を続ける。また、この自車両の速度の情報および加減速度の情報が請求項の速さ関連情報に相当する。
【0064】
ステップS2では、ステップS1で記憶した走行状況情報を走行区間単位に分割する分割処理を制御部46が行い、ステップS3に移る。なお、ここで言うところの走行区間とは、自車両が発進してから停止するまでの区間(以下、GO−STOP区間)を示している。また、GO−STOP区間は、例えば車輪速センサ34から得られた車両の速度の情報をもとに判別するものとする。詳しくは、自車両の速度が車輪速センサ34で検出可能な速度の値(以下、限界値)を超えてからその限界値に達するまでをGO−STOP区間と判別するものとする。
【0065】
ステップS3では、有効データ判別処理を制御部46が行い、ステップS4に移る。ここで、図5のフローチャートを用いて、有効データ判別処理の概略について説明を行う。なお、図5は、有効データ判別処理のフローの一例を示すフローチャートである。また、この有効データ判別処理は、ステップS2の分割処理で得られた各GO−STOP区間について行われる。
【0066】
まず、ステップS31では、対象とするGO−STOP区間が高速道路に該当するか否かを判定する。なお、GO−STOP区間が高速道路に該当するか否かは、位置検出器31から入力される自車両の現在位置の情報や地図データ入力器36から入力される地図データのうちの道路種別の情報をもとに判定する構成とすればよい。
【0067】
そして、対象とするGO−STOP区間が高速道路に該当すると判定した場合(ステップS31でYES)には、運転特性の特定に適していないものとして、ステップS33に移る。また、高速道路に該当すると判定しなかった場合(ステップS31でNO)には、ステップS32に移る。
【0068】
ステップS32では、車輪速センサ34から得られた自車両の速度の情報をもとに、対象とするGO−STOP区間の走行状況情報において、自車両の速度が所定値(例えば30km/h)を超えたか否かを判定する。なお、ここで言うところの所定値とは、速度の遅い先行車両に追従していたり、渋滞に巻き込まれていたりするなど、ドライバの運転特性が出にくい状況におけるデータを判別するための閾値であって、任意に設定可能なものである。本実施形態では、前述したように所定値を30km/hと設定する場合を例に挙げて説明を行う。
【0069】
そして、対象とするGO−STOP区間の走行状況情報において、自車両の速度が30km/hを超えたと判定した場合(ステップS32でYES)には、ステップS34に移る。また、自車両の速度が30km/hを超えたと判定しなかった場合(ステップS32でNO)には、運転特性の特定に適していないものとして、ステップS33に移る。よって、制御部46は請求項の第2適否判定手段に相当する。また、ステップS33では、対象とするGO−STOP区間の走行状況情報を不要なデータとして消去し、ステップS4に移る。
【0070】
ステップS34では、車輪速センサ34から得られた自車両の速度の情報および加速度センサ32から得られた自車両の加減速度の情報をもとに、対象とするGO−STOP区間の走行状況情報における自車両の発進時からの所定期間の平均加速度(以下、発進時平均加速度)、自車両の停止時までの所定期間の平均減速度(以下、停車時平均減速度)、最大加速度、最大減速度、および最高到達速度の5種類のデータ(以下、GO−STOPデータ)を算出し、ステップS35に移る。
【0071】
なお、本実施形態では、自車両の発進時からの所定期間とは、例えば自車両の発進時から自車両の速度が30km/hに達するまでの期間とする。また、自車両の停止時までの所定期間とは、例えば自車両の速度が30km/hを下回ってから30km/hを超えずに自車両が停止するまでの期間とする。
【0072】
ステップS35では、自車両の発進時からの所定期間にブレーキが踏まれたか否かを判定する。なお、ブレーキが踏まれたか否かは、対象とするGO−STOP区間の走行状況情報のうちの、例えばブレーキスイッチから得られたブレーキペダルの操作のON/OFFの情報をもとに判定する構成とすればよい。
【0073】
そして、発進時からの所定期間(つまり、発進期間)にブレーキが踏まれたと判定した場合(ステップS35でYES)には、例えば発進直後に速度の遅い先行車両に前方を塞がれたりするなどして、ドライバの運転傾向に従った加速が行われなかった(つまり、運転特性の特定に適していない)ものとして、ステップS36に移る。また、発進時からの所定期間にブレーキが踏まれたと判定しなかった場合(ステップS35でNO)には、ステップS37に移る。また、ステップS36では、対象とするGO−STOP区間のGO−STOPデータのうちの、発進時平均加速度のデータを消去し、ステップS37に移る。
【0074】
ステップS37では、自車両の停止時までの所定期間にアクセルが踏まれたか否かを判定する。なお、アクセルが踏まれたか否かは、対象とするGO−STOP区間の走行状況情報のうちの、例えばアイドルスイッチから得られたアクセルペダルの操作のON/OFFの情報をもとに判定する構成とすればよい。
【0075】
そして、停止時までの所定期間(つまり、停車期間)にアクセルが踏まれたと判定した場合(ステップS37でYES)には、例えば停車直前に先行車両に追従するなどしてドライバの運転傾向に従った減速が行われなかった(つまり、運転特性の特定に適していない)ものとして、ステップS38に移る。また、停止時までの所定期間にアクセルが踏まれたと判定しなかった場合(ステップS37でNO)には、ステップS39に移る。また、ステップS38では、対象とするGO−STOP区間におけるGO−STOPデータのうちの、停車時平均減速度のデータを消去し、ステップS39に移る。よって、制御部46は請求項の第1適否判定手段に相当する。
【0076】
ステップS39では、発進時平均加速度のデータ、もしくは停車時平均減速度のデータのいずれかのデータの消去があった場合(ステップS39でYES)には、ステップS40に移る。また、いずれのデータの消去もなかった場合(ステップS39でNO)には、ステップS4に移る。
【0077】
ステップS40では、対象とするGO−STOP区間におけるGO−STOPデータ(つまり、消去されていないデータである最大加速度、最大減速度、および最高到達速度のデータ)の後述の学習時における重みを下げて、ステップS4に移る。
【0078】
図4に戻って、ステップS4では、ステップS3の分別処理で得られた各GO−STOPデータを蓄積し、ステップS5に移る。なお、ステップS3の分別処理で得られた各GO−STOPデータについては、制御部46のEEPROMやRAM等の書き換え可能なメモリに記憶する構成としてもよいし、外部メモリ38に記憶する構成としてもよい。また、蓄積したGO−STOPデータが一定量以上となった場合に、古いデータから消去していく構成としてもよい。
【0079】
なお、自車両を利用するドライバが複数存在する場合に、運転中のドライバを例えば操作スイッチ群41やリモコン42などを介して設定可能とするとともに、各ドライバを特定する識別情報(例えばユーザIDとする)にGO−STOPデータを紐付けするなどして、ドライバごとにGO−STOPデータを管理する構成としてもよい。この場合、ドライバごとのGO−STOPデータをもとに、ドライバごとの運転特性を特定する構成とすればよい。
【0080】
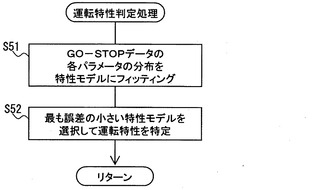
ステップS5では、運転特性特定処理を行って、ステップS1に戻り、フローを繰り返す。ここで、図6のフローチャートおよび図7の模式図を用いて、運転特性特定処理の概略について説明を行う。なお、図6は、運転特性特定処理のフローの一例を示すフローチャートである。また、図7は、フィッティングの一例を説明するための模式図である。
【0081】
まず、ステップS51では、GO−STOPデータの各パラメータの分布を3種類の特性モデルにフィッティングさせる処理を制御部46が行う。なお、ここで言うところのGO−STOPデータの各パラメータには、前述した発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度が該当する。また、ステップS3の有効データ判別処理において、発進時平均加速度や停車時平均減速度がGO−STOPデータから消去されていた場合には、消去されなかった残りのデータが該当することになる。
【0082】
さらに、ここで言うところの3種類の特性モデルとは、自車両の速度および加速度がより大きくなる傾向にある走り屋パターンのモデル(図7のモデルA参照)、速度および加速度がより小さくなる傾向にあるエコドライバパターンのモデル(図7のモデルC参照)、走り屋パターンとエコドライバパターンの中間の傾向にある普通パターンのモデル(図7のモデルB参照)の3種類である。
【0083】
また、上記3種類の特性モデルには、それぞれに該当するパターンのドライバの運転傾向を反映した発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度の各パラメータが予め設定されているものとする。なお、特性モデルに予め設定されている各パラメータは、走り屋パターン、普通パターン、エコドライバパターンの各パターンに該当するドライバの実測値やシミュレーション等によって任意に設定可能なものである。
【0084】
ステップS52では、3種類の特性モデルへのフィッティングの結果、最も誤差の小さい特性モデルを選択し、選択したモデルに該当するパターンをドライバの運転特性として特定する。フィッティングでは、例えばGO−STOPデータの各パラメータの値と特性モデルの各パラメータの値との差分を計算し、その差分の絶対値の合計が最も小さくなる特性モデルを最も誤差の小さい特性モデルとして選択する構成とすればよい。
【0085】
例えば、図7の例では、走り屋パターンのモデルAの各パラメータの分布にGO−STOPデータの各パラメータの分布が最も一致しており、フィッティングの誤差が最も小さいので、破線で示す円で囲ったようにモデルAが選択され、ドライバの運転特性が走り屋パターンと特定されることになる。
【0086】
なお、ステップS3の有効データ判別処理において一部のデータが消去されているGO−STOPデータについては、例えば特性モデルとの間で、残ったパラメータ同士の差分を計算し、その差分の絶対値の合計が最も小さくなる特性モデルを最も誤差の小さい特性モデルとして選択する構成とすればよい。
【0087】
また、フィッティングの処理は、蓄積されている各GO−STOPデータについて行い、各GO−STOPデータについて特定した運転特性を学習してドライバの運転特性を最終的に特定する。例えば、5種類のパラメータが全て揃ったGO−STOPデータについては、最も大きな重みを設定し、4種類のパラメータが揃ったGO−STOPデータについては、それに次ぐ大きさの重みを設定し、3種類のパラメータしかないGO−STOPデータについては、最も小さな重みを設定する。
【0088】
そして、各GO−STOPデータについてのフィッティングの処理の結果を総合し、より重みの大きいGO−STOPデータについて特定された数がより多かった前述のパターンをドライバの運転特性として最終的に特定し、ステップS1に戻る。よって、制御部46が請求項の運転特性特定手段に相当する。また、図4のフローは、例えば自車両のイグニッションスイッチがオフされたときに終了するものとしてもよい。
【0089】
なお、特定した運転特性については、制御部46のEEPROMやRAM等の書き換え可能なメモリや外部メモリ38に記憶する。また、本実施形態では、運転特性特定処理で特定した運転特性の情報は、例えば外部メモリ38に記憶するものとして以降の説明を続ける。なお、自車両を利用するドライバが複数存在する場合には、各ドライバを特定する識別情報(例えばユーザIDとする)をそれぞれのドライバの運転特性に紐付けして運転特性の情報を記憶する構成とすればよい。
【0090】
また、本実施形態では、発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度の5種類のパラメータを用いて運転特性を特定する構成を示したが、必ずしもこれに限らない。例えば、自車両の速度に関連する情報(例えば最高到達速度)、自車両の加速度に関連する情報(例えば、発進時平均加速度、最大加速度)、および自車両の減速度に関連する情報(例えば、停車時平均減速度、最大減速度)のうちの少なくともいずれかを用いて運転特性を特定する構成としてもよい。
【0091】
なお、自車両の速度、加速度、および減速度に関連する情報のうちの少なくともいずれかを用いて運転特性を特定する構成とする場合には、少なくとも自車両の加速度に関連する情報を用いて運転特性を特定する構成とすることが好ましい。これは、自車両の加速度に関連する情報にドライバごとの違いがより顕著に出易く、自車両の加速度に関連する情報をもとにドライバの運転特性を特定すればドライバの運転特性をより確実に精度良く特定することができるためである。
【0092】
ここで、図8(a)〜図8(c)を用いて、自車両の加速度に関連する情報にドライバごとの違いがより顕著に出易いことの説明を行う。なお、図8(a)〜図8(c)は、ドライバの運転する車両の速度(車速)の実測値の時間変化を示している。また、図8(a)が走り屋パターンに該当するドライバについての実測値、図8(b)が普通パターンに該当するドライバについての実測値、図8(c)がエコドライバパターンに該当するドライバについての実測値を示している。また、図中の破線が発進時平均加速度を表している。図8(a)〜図8(c)から明らかなように、発進時平均加速度は走り屋パターン、普通パターン、エコドライバパターンの各パターンで明らかに異なっており、自車両の加速度に関連する情報にドライバごとの違いがより顕著に出易いことは明らかである。
【0093】
なお、自車両の速度や加減速に関連する情報に限らず、フットブレーキとエンジンブレーキとを利用している比率等を利用して運転特性を分ける構成としてもよい。一例として、エンジンブレーキの使用率が高いドライバはエコドライバパターンとすればよい。
【0094】
また、経路案内関連処理では、制御部46は、運転特性特定処理で特定したドライバの運転特性の情報、位置検出器31から入力される自車両の現在位置の情報、操作スイッチ群41やリモコンセンサ43から入力される目的地の情報等の各種情報を、通信装置45を介して経路案内サーバ装置2に送信し、経路探索を要求する。そして、当該各種情報をもとに経路案内サーバ装置2で経路探索処理を行って得られた案内経路の情報(以下、経路情報)を、通信装置45を介して受信し、受信した経路情報に従って、制御部46が経路案内を開始する。
【0095】
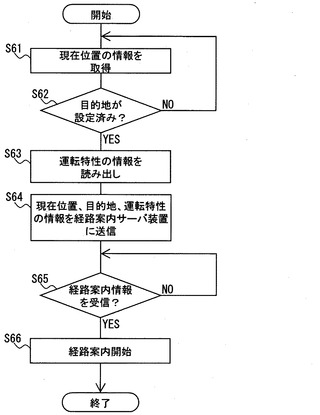
ここで、図9を用いて、制御部46での経路案内関連処理についての説明を行う。なお、図9は、制御部46での経路案内関連処理のフローの一例を示すフローチャートである。また、図9のフローは、例えば操作スイッチ群41やリモコン42を介してドライバ等のユーザから経路案内の開始を要求する旨の操作入力を受け付けたときに開始されるものとすればよい。
【0096】
まず、ステップS61では、位置検出器31から入力される自車両の現在位置の情報を取得し、ステップS62に移る。続いて、ステップS62では、目的地が設定済みか否かを判定する。なお、目的地が設定済みか否かについては、操作スイッチ群41やリモコンセンサ43から目的地の情報が入力されたか否かによって判定する構成とすればよい。そして、目的地が設定済みと判定した場合(ステップS62でYES)には、ステップS63に移る。また、目的地が設定済みと判定しなかった場合(ステップS62でNO)には、ステップS61に戻ってフローを繰り返す。なお、目的地が設定済みと判定しなかった場合には、目的地の設定を促す表示を表示装置39に行わせたり、目的地の設定を促す音声出力を音声出力装置40に行わせたりすることによって、目的地の設定をユーザに促す構成としてもよい。
【0097】
ステップS63では、運転特性特定処理で特定したドライバの運転特性の情報を外部メモリ38から読み出し、ステップS64に移る。なお、自車両を利用するドライバが複数存在し、各ドライバを特定するユーザIDがそれぞれのドライバの運転特性に紐付けして運転特性の情報が記憶されている場合には、ユーザIDをもとに目的とするドライバについての運転特性の情報を読み出す構成とすればよい。
【0098】
ステップS64では、取得済みの現在位置、目的地、および運転特性の情報を、通信装置45を介して経路案内サーバ装置2に送信し、ステップS65に移る。ステップS65では、経路案内サーバ装置2から経路案内情報を受信した場合(ステップS65でYES)には、ステップS66に移る。また、経路案内サーバ装置2から経路案内情報を受信していない場合(ステップS65でNO)には、ステップS65のフローを繰り返す。ステップS66では、経路案内サーバ装置2から受信した経路案内情報に従って経路案内を開始し、フローを終了する。
【0099】
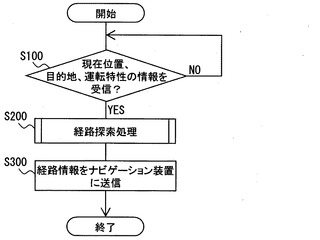
続いて、図10を用いて、経路案内サーバ装置2の制御部24での経路探索に関連する処理についての説明を行う。なお、図10は、経路案内サーバ装置2の制御部24での経路探索に関連する処理のフローの一例を示すフローチャートである。また、図10のフローは、例えば経路案内サーバ装置2とナビゲーション装置3との間での通信が確立したときに開始されるものとすればよい。
【0100】
ステップS100では、ナビゲーション装置3から現在位置、目的地、および運転特性の情報を受信した場合(ステップS100でYES)には、ステップS200に移る。また、ナビゲーション装置3から現在位置、目的地、および運転特性の情報を受信していない場合(ステップS100でNO)には、ステップS100を繰り返す。
【0101】
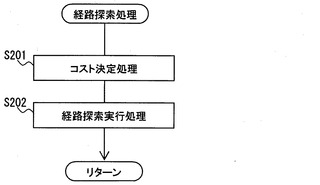
ステップS200では、経路探索処理を行ってステップS300に移る。ここで、図11のフローチャートを用いて、経路探索処理の概略について説明を行う。なお、図11は、経路探索処理のフローの一例を示すフローチャートである。
【0102】
まず、ステップS201では、コスト決定処理を行って、ステップS202に移る。コスト決定処理では、ナビゲーション装置3から得た運転特性の情報、地図DB22に格納されている地図データ、およびVICSセンタ1から受信した渋滞箇所や渋滞度の情報をもとにコスト定数を決定する。よって、制御部24が請求項の渋滞情報取得手段に相当する。
【0103】
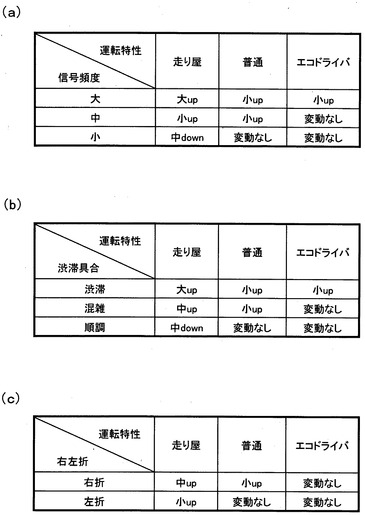
ここで、図12(a)〜図12(c)を用いて、運転特性に応じたコスト定数の決定の一例についての説明を行う。なお、図12(a)は、運転特性と信号交差点の数とに応じたリンクコスト(つまり、コスト定数)の一例を示す表である。また、図12(b)は、運転特性と渋滞の度合いとに応じたリンクコストの一例を示す表である。そして、図12(c)は、運転特性と交差点の右左折とに応じたノードコスト(つまり、コスト定数)の一例を示す表である。また、コスト決定処理においては、運転特性に応じた燃費や電費といった走行エネルギーの消費効率を考慮したコスト定数が決定されるものとし、図12(a)〜図12(c)の表についても、この走行エネルギーの消費効率を考慮してコスト定数が変更されている。
【0104】
例えば、図12(a)に示すように、運転特性が走り屋パターン(図12(a)〜図12(c)の「走り屋」)の場合には、信号交差点の数(つまり、信号頻度)が「大」のリンクについては、リンクコストを大きく上げて設定する。また、信号頻度が「中」のリンクについては、リンクコストを小さく上げて設定する。さらに、信号頻度が「小」のリンクについては、リンクコストを中ぐらい下げて設定する。なお、ここで言うところの大、中、小とは、相対的な量であって、詳細な量については任意に設定可能なものとし、以降についても同様のものとする。また、コスト定数の上げ下げは、例えば基準値を基準として上げ下げするものとすればよい。
【0105】
また、運転特性が普通パターン(図12(a)〜図12(c)の「普通」)の場合には、信号頻度が「大」および「中」のリンクについては、リンクコストを小さく上げて設定する。さらに、信号頻度が「小」のリンクについては、リンクコストを基準値のまま設定する(つまり、変動なし)。また、運転特性がエコドライバパターン(図12(a)〜図12(c)の「エコドライバ」)の場合には、信号頻度が「大」のリンクについては、リンクコストを小さく上げて設定する。さらに、信号頻度が「中」および「小」のリンクについては、リンクコストを基準値のまま設定する。
【0106】
続いて、図12(b)に示すように、運転特性が走り屋パターンの場合には、渋滞度合い(つまり、渋滞具合)が「渋滞」のリンクについては、リンクコストを大きく上げて設定する。また、渋滞具合が「混雑」のリンクについては、リンクコストを中ぐらい上げて設定する。さらに、渋滞具合が「順調」のリンクについては、リンクコストを中ぐらい下げて設定する。なお、渋滞具合については、VICSセンタ1の渋滞度の評価基準に従う構成とすればよい。
【0107】
また、運転特性が普通パターンの場合には、渋滞具合が「渋滞」および「混雑」のリンクについては、リンクコストを小さく上げて設定する。さらに、渋滞具合が「順調」のリンクについては、リンクコストを基準値のまま設定する。また、運転特性がエコドライバパターンの場合には、渋滞具合が「渋滞」のリンクについては、リンクコストを小さく上げて設定する。また、渋滞具合が「混雑」および「順調」のリンクについては、リンクコストを基準値のまま設定する。
【0108】
さらに、図12(c)に示すように、運転特性が走り屋パターンの場合には、交差点の右左折の方向(つまり、右左折)が「右折」のノードについては、ノードコストを中ぐらい上げて設定する。また、右左折が「左折」のノードについては、ノードコストを小さく上げて設定する。さらに、運転特性が普通パターンの場合には、右左折が「右折」のノードについては、ノードコストを小さく上げて設定する一方、「左折」のノードについては、ノードコストを基準値のまま設定する。また、運転特性がエコドライバパターンの場合には、右左折が「右折」のノードについても「左折」のノードについても、ノードコストを基準値のまま設定する。
【0109】
なお、本実施形態では、運転特性が走り屋パターンの場合に、信号交差点の数が多いリンクのリンクコスト、渋滞箇所を含むリンクのリンクコスト、右左折する交差点のノードのノードコストを上げる構成を示したが、必ずしもこれに限らない。例えば、運転特性が走り屋パターンの場合に、一旦停止が存在するノードのノードコストや一旦停止を含むリンクのリンクコストを上げる構成としてもよい。なお、一旦停止が存在するノードや一旦停止を含むリンクについては、地図DB22に格納されている地図データをもとに判別する構成とすればよい。
【0110】
また、本実施形態では、ドライバの運転特性を走り屋パターン、普通パターン、エコドライバパターンの3種類のパターンに分ける構成を示したが、必ずしもこれに限らず、2種類のパターンに分ける構成としてもよいし、3種類以上のパターンに分ける構成としてもよい。
【0111】
なお、3種類以上のパターンに分ける場合に、例えば「発進時平均加速度=XXX」、「停車時平均減速度=XXX」、「最高到達速度=XXX」といったように、自車両の速度や加減速度に関連する情報の数値ごとに分ける構成としてもよい。また、この場合には、例えば蓄積されている各GO−STOPデータのうちの自車両の速度や加減速度に関連する情報の数値の平均値(以下、特性値)を、ドライバの運転特性の情報として扱う構成としてもよい。
【0112】
さらに、上述したように、特性値をドライバの運転特性の情報として扱う場合には、コスト決定処理において、例えば図13のグラフで示すような一次関数に基づいて、特性値に応じたコスト定数を決定する構成としてもよい。なお、図13は、コスト定数と特性値との関係を示すグラフである。
【0113】
図11に戻って、ステップS202では、コスト決定処理で決定したコスト定数に基づいて、経路探索実行処理を行って、ステップS300に移る。経路探索実行処理では、距離優先、時間優先、走行エネルギー消費効率優先等の予め設定された探索条件を満たす最適な経路を探索する。このような自動的に最適な経路を探索する手法は、例えば、周知のダイクストラ法によるコスト計算、すなわち、コスト定数(つまり、リンクコストやノードコスト)を用いた評価値計算によって行う。ここで、本実施形態のコスト計算について簡単に説明する。
【0114】
なお、本実施形態では、走行エネルギー消費効率優先を探索条件として、前述した走行エネルギーの消費効率を考慮したコスト定数を用いて経路が探索されるものとする。また、本実施形態では、ナビゲーション装置3から受信した現在位置の情報が示す位置を出発地として説明を続けるが、ナビゲーション装置3において、操作スイッチ群41やリモコン42を介してユーザから設定入力された地点を出発地とする構成としてもよい。なお、この場合には、現在位置の情報の代わりに上記設定入力された地点の情報をナビゲーション装置3から経路案内サーバ装置2に送信する構成とすればよい。
【0115】
まず、出発地から目的地までをカバーするリンクデータおよびノードデータを地図DB22から読み出し、制御部24のRAM等のメモリに記憶する。そして、その記憶されたリンクデータおよびノードデータを用いて、出発地から目的地までのリンクコストおよびノードコストの合計値が最小となる経路を探索する。なお、地図DB22が請求項の地図データ記憶手段に相当し、制御部24が請求項の経路探索手段に相当する。
【0116】
すなわち、経路探索実行処理では、コスト定数を出発地から目的地までのリンクデータおよびノードデータに乗じ、出発地から目的地まで累積した累積値が最小となる経路を探索する。このとき、運転特性に応じてコスト決定処理で決定されたコスト定数を用いることによって、運転特性に応じた案内経路が設定されることになる。
【0117】
例えば、図12(a)〜図12(c)に示すように、ドライバの運転特性が走り屋パターンであった場合には、信号交差点の数が多いリンクのコスト定数、右左折する交差点のノードのコスト定数を大きくしたり、渋滞箇所を含むリンクのコスト定数を大きくしたりすることによって、車両の停止回数がより少なくなる経路や車両が渋滞箇所を通過する回数がより少なくなる経路が探索されるように設定して、走り屋パターンに運転傾向が該当するドライバのストレスを軽減できるようにする。
【0118】
図10に戻って、ステップS300では、経路探索処理を行って得られた案内経路の情報(つまり、経路情報)を、通信装置21を介してナビゲーション装置3に送信し、フローを終了する。
【0119】
以上の構成によれば、自車両が発進してから停止するまでの区間であるGO−STOP区間単位での発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度(つまり、GO−STOPデータ)をもとに、ドライバの運転特性を特定することになるので、一旦停止箇所や信号等の車両の運行を規制する運行規制要因による停車時間における情報を排除した情報をもとに、ドライバの運転特性を特定することができる。従って、運行規制要因の影響を受けずに、ドライバの運転特性を精度良く特定することが可能になる。
【0120】
また、以上の構成によれば、有効データ判別処理において、運転特性の特定に適していないと判別したGO−STOP区間におけるGO−STOPデータの全てを運転特性の特定に用いないようにしたり、運転特性の特定に適していないと判別したGO−STOPデータのうちの一部のデータを運転特性の特定に用いないようにしたりする。よって、ドライバの運転特性が出にくい状況におけるGO−STOPデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0121】
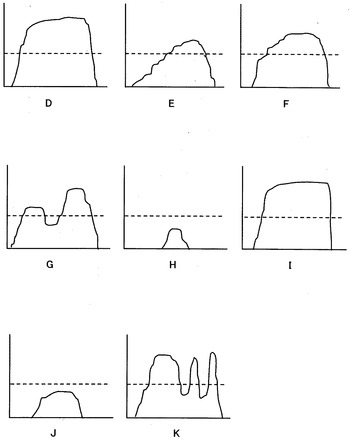
ここで、以上の作用効果について、具体的に図14を用いて説明を行う。図14は、各種の運転状況における自車両の速度変化を示す模式図である。なお、図14中のD〜Kのグラフの縦軸が自車両の速度を表しており、横軸が時間を表している。また、D〜Kのグラフ中の破線は、所定値(本実施形態の例では30km/h)を表している。
【0122】
なお、Dのグラフは、先行車両が存在せずにドライバの運転傾向に従った走行が行われた場合のタイプ(以下、通常タイプ)のグラフである。また、Eのグラフは、加速の遅い先行車両が存在するタイプ(以下、第1追従タイプ)のグラフである。さらに、Fのグラフは、自車両の加速途中で速度の遅い先行車両に前を塞がれたタイプ(以下、第2追従タイプ)のグラフである。また、Gのグラフは、交差点などで一時減速するタイプ(以下、二山タイプ)のグラフである。さらに、Hのグラフは、渋滞に巻き込まれたタイプ(以下、渋滞タイプ)のグラフである。また、Iのグラフは、先行車両の急停止に合わせて急停止したタイプ(以下、急ブレーキタイプ)のグラフである。さらに、Jのグラフは、赤信号等によって加速が途中で終わるタイプ(以下、途中停止タイプ)のグラフである。また、Kのグラフは、信号などで何度も止まりそうになるがなかなか止まらないタイプ(ギザギザタイプ)のグラフである。
【0123】
例えば、前述した有効データ判別処理では、GO−STOP区間における自車両の速度が30km/hを超えたと判定しなかった場合に、運転特性の特定に適していないとして当該GO−STOP区間におけるGO−STOPデータの全てを運転特性の特定に用いないことになる。これによれば、自車両の速度が30km/hを超えることがないHの渋滞タイプおよびJの途中停止タイプのGO−STOP区間におけるGO−STOPデータについては、GO−STOPデータ全てを運転特性の特定に用いないので、ドライバの運転特性が出にくい状況におけるGO−STOPデータを除いて運転特性の特定を行うことによって、ドライバの運転特性を精度良く特定することが可能になる。
【0124】
さらに、前述した有効データ判別処理では、GO−STOP区間における発進期間にブレーキが踏まれたと判定した場合に、運転特性の特定に適していないとして当該GO−STOP区間におけるGO−STOPデータのうちの発進時平均加速度を運転特性の特定に用いないことになる。
【0125】
これによれば、自車両の速度が30km/hに達する前にブレーキが踏まれて加速度が大幅に低下しているEの第1追従タイプおよびFの第2追従タイプのGO−STOP区間におけるGO−STOPデータについては、発進時平均加速度を運転特性の特定に用いないので、ドライバの運転特性が出にくい状況における発進時平均加速度を除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。なお、ここでは、自車両の速度が30km/hに達する前にブレーキが踏まれたという操作情報が請求項の操作情報に相当し、発進時平均加速度が請求項の運転操作に対応する速さ関連情報に相当する。
【0126】
他にも、前述した有効データ判別処理では、GO−STOP区間における停車期間にアクセルが踏まれたと判定した場合に、運転特性の特定に適していないとして当該GO−STOP区間におけるGO−STOPデータのうちの停車時平均減速度を運転特性の特定に用いないことになる。
【0127】
これによれば、自車両の速度が30km/hを下回ってから30km/hを超えずに自車両が停止するまでの期間にアクセルが踏まれて減速度が大幅に低下しているEの第1追従タイプのIのグラフは、先行車両の急停止に合わせて急停止したタイプ(以下、急ブレーキタイプ)ので、ドライバの運転特性が出にくい状況における停車時平均減速度を除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。なお、ここでは、自車両の速度が30km/hを下回ってから30km/hを超えずに自車両が停止するまでの期間にアクセルが踏まれたという操作情報が請求項の操作情報に相当し、停車時平均減速度が請求項の運転操作に対応する速さ関連情報に相当する。
【0128】
また、本実施形態で説明した以外にも、停車時平均減速度が基準値と比較して乖離度が所定量(任意に設定可能)以上であって極端に大きいことを指標にして、Iの急ブレーキタイプのGO−STOP区間におけるGO−STOPデータについては、停車時平均減速度を運転特性の特定に用いないで、ドライバの運転特性が出にくい状況における停車時平均減速度を除いて運転特性の特定を行う構成としてもよい。他にも、停車時平均減速度や発進時平均加速度や最大加速度や最大減速度が基準値と比較して乖離度が所定量(任意に設定可能)以上であって極端に小さいことを指標にして、ドライバの運転特性が出にくい状況におけるデータを除いて運転特性の特定を行う構成としてもよい。なお、ここで言うところの基準値とは、運転特性の特定に適しているか否かを判別するための自車両の速度や加減速度の情報の基準となる値であって、各パターンのドライバの運転傾向に従った走行が行われた場合の自車両の速度や加減速度の情報を考慮して定められるものである。例えば、基準値は、各パターンのドライバの運転傾向に従った走行が行われた場合の自車両の速度や加減速度の情報の平均値等を用いる構成としてもよい。
【0129】
さらに、Gの二山タイプやKのギザギザタイプのGO−STOP区間におけるGO−STOPデータについては、最高到達速度が規定値(任意に設定可能なものとする)に達していない場合に、最高到達速度を運転特性の特定に用いないで、ドライバの運転特性が出にくい状況における最高到達速度を除いて運転特性の特定を行う構成としてもよい。
【0130】
また、GO−STOP区間における加速中(例えば最高到達速度に到達する1分以内)に、アクセル開度が0となる頻度が例えば3回以上となった場合に、当該GO−STOP区間におけるGO−STOPデータ全てを運転特性の特定に用いないようにしたり、発進時平均加速度を運転特性の特定に用いないようにしたりする構成としてもよい。
【0131】
さらに、GO−STOP区間の道路状態をもとに、当該GO−STOP区間におけるGO−STOPデータが運転特性の特定に適しているか否かを制御部46が判定し、ドライバの運転特性が出にくい状況におけるGO−STOPデータを除いて運転特性の特定を行う構成としてもよい。この場合には、地図データ入力器36から入力される地図データをもとに、対象とするGO−STOP区間に対応する道路の勾配の情報や道路種別の情報といった道路状態に関する情報を制御部46が取得する構成とすればよい。よって、制御部46が請求項の道路情報取得手段および第3適否判定手段に相当する。
【0132】
そして、道路の勾配が所定値(任意に設定可能とする)以上に該当したり、対面通行の道路等の細街路に該当したりした場合に、外乱要素が大きいものとして、当該GO−STOP区間におけるGO−STOPデータ全てを除いて運転特性の特定を行う構成とすればよい。
【0133】
なお、前述した学習を多くのGO−STOPデータについて行うほど運転特性の特定の精度は上がるが、運転特性の特定に適していないデータを除いたGO−STOPデータについては、運転特性の特定に適していないデータが含まれていないGO−STOPデータに比べ、利用することのできるデータが少ない分だけ、運転特性の特定の精度が劣る可能性がある。これに対して、以上の構成によれば、運転特性の特定に適していないデータを除いたGO−STOPデータについては、学習時の重みを下げて学習を行うので、運転特性の特定の精度の低下を抑えながら、運転特性の特定の精度を向上させることが可能になる。
【0134】
また、以上の構成によれば、ナビゲーション装置3の制御部46で精度良く特定したドライバの運転特性に応じたコスト定数を地図データの各リンクデータおよびノードデータに付与して、目的地に至る経路のうち、各リンクデータおよびノードデータに付与されたコスト定数の合計が最小となる経路を探索するので、ドライバの運転特性に応じた経路を正確に探索することが可能となる。
【0135】
なお、本実施形態では、ナビゲーション装置3の制御部46で運転特性特定処理を行う構成を示したがが、必ずしもこれに限らない。例えば、運転特性特定処理を経路案内サーバ装置2の制御部24で行わせるなど、ナビゲーション装置3が搭載される車両外のサーバ装置で行わせる構成としてもよい。
【0136】
また、経路案内サーバ装置2の制御部24で運転特性特定処理を行う構成とする場合には、走行状況情報や自車両の現在位置の情報やドライバを特定する識別情報(例えばユーザIDとする)をナビゲーション装置3から経路案内サーバ装置2に送信し、これらの情報をもとに制御部24で運転特性特定処理を行う構成とすればよい。なお、制御部24での運転特性特定処理で運転特性が得られた場合には、ユーザIDと紐付けてこの運転特性の情報を情報記憶部23等のメモリに記憶する。そして、ナビゲーション装置3から経路探索の要求があった場合に、対象とするドライバのユーザIDをもとに、対象とするドライバの運転特性の情報を読み出し、読み出した運転特性の情報を用いてコスト決定処理を行う構成とすればよい。
【0137】
さらに、本実施形態では、経路案内サーバ装置2でコスト決定処理および経路探索実行処理を行う構成を示したが、必ずしもこれに限らない。例えば、コスト決定処理および経路探索実行処理についてもナビゲーション装置3で行う構成としてもよい。この場合には、経路案内サーバ装置2の制御部24でのコスト決定処理および経路探索実行処理と同様にして、ナビゲーション装置3の制御部46でコスト決定処理および経路探索実行処理を行う構成とすればよい。
【0138】
また、この場合には、渋滞箇所や渋滞度の情報については、VICSセンタ1と通信を行う通信装置を備えることによってVICSセンタ1から取得するものとし、地図データについては地図データ入力器36を介して記憶媒体37から取得するものとする。よって、この場合には、記憶媒体37が請求項の地図データ記憶手段に相当し、ナビゲーション装置3が経路探索装置に相当する。
【0139】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0140】
1 VICSセンタ、2 経路案内サーバ装置、3 ナビゲーション装置(経路探索装置)、21 通信装置、22 地図DB(地図データ記憶手段)、23 情報記憶部、24 制御部(経路探索手段、渋滞情報取得手段)、31 位置検出器、36 地図データ入力器、37 記憶媒体(地図データ記憶手段)、38 外部メモリ、39 表示装置、40 音声出力装置、41 操作スイッチ群、42 リモコン、43 リモコンセンサ、44 外部入力部、45 通信装置、46 制御部(運転特性特定装置、運転情報取得手段、第1適否判定手段、第2適否判定手段、第3適否判定手段、運転特性特定手段、道路情報取得手段、経路探索手段)、100 経路案内システム(経路探索装置)
【技術分野】
【0001】
本発明は、運転特性特定装置および経路探索装置に関するものである。
【背景技術】
【0002】
従来から、ドライバの運転の癖(以下、運転特性)を特定し、その運転特性に応じた経路を提供する技術が知られている。
【0003】
例えば、特許文献1には、地図データのリンクごとにアクセルセンサ、ブレーキセンサ、車速センサ等の各種センサから運転情報を収集し、収集したこの運転情報に基づき、評価対象のリンクにおけるユーザの運転特性を特定する技術が開示されている。そして、特定した運転特性に応じた燃料コストを算出し、燃料コストの合計が最小となる経路を探索する技術が開示されている。
【0004】
また、特許文献2には、1Km走行などの予め決められた単位区間分だけ、速度などの車両情報を含む運転状況情報と燃費情報を取得し、既に格納されている過去の運転状況パターンの中から相関の高い運転状況パターンを求めるとともに、その運転状況パターンに対応する燃費頻度分布データを更新する技術が開示されている。そして、運転状況パターンに対応する燃費頻度分布データを燃費計算や経路探索のコスト計算に利用することが開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−107155号公報
【特許文献2】特開2009−31046号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1や特許文献2に開示の技術のように、リンクや所定距離の区間ごとの運転情報から運転特性を特定しようとすると、ドライバごとの運転特性を精度良く特定することができないという問題点があった。
【0007】
詳しくは、以下の通りである。まず、個々のリンクや所定距離の区間の間には、一旦停止箇所や信号等の車両の運行を規制する要因(以下、運行規制要因)の存在にばらつきがある。よって、上記運行規制要因の存在によって、個々のリンクや所定距離の区間の間で車両の速度や加減速度に関連する運転情報にばらつきが生じてしまう。また、同一のリンクや区間であっても、信号が赤信号か青信号かといったように時間帯によって車両の運行を規制する要因に変化があるため、この点でも個々のリンクや所定距離の区間の間で車両の速度や加減速度に関連する運転情報にばらつきが生じてしまう。従って、リンク単位や所定距離の区間単位の運転情報から運転特性を特定しようとしても、ドライバごとの運転特性を精度良く特定することはできない。
【0008】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、ドライバの運転特性を精度良く特定することを可能にする運転特性特定装置および経路探索装置を提供することにある。
【課題を解決するための手段】
【0009】
請求項1の運転特性特定装置によれば、運転特性特定手段が、車両が発進してから停止するまでの区間である走行区間単位での車両の速度、加速度、および減速度のうちの少なくともいずれかに関連する情報である速さ関連情報をもとに、ドライバの運転特性を特定することになる。
【0010】
走行区間は、車両が発進してから停止するまでの区間であるので、走行区間単位での速さ関連情報は、停車中の速さ関連情報を含まない。従って、走行区間単位での速さ関連情報をもとにドライバの運転特性を特定すれば、一旦停止箇所や信号等の車両の運行を規制する要因(以下、運行規制要因)によって生じた停車時間における速さ関連情報を含まない速さ関連情報をもとに、ドライバの運転特性を特定することができるので、運行規制要因の影響を受けずに、ドライバの運転特性を精度良く特定することが可能になる。
【0011】
また、請求項2のように、運転特性特定手段が、走行区間単位での速さ関連情報をもとに、ドライバの運転傾向を複数種類のパターンに分けることによって、ドライバの運転特性を特定する態様としてもよい。
【0012】
また、請求項3のように、運転特性特定手段が、ドライバの運転特性を車両の速度および加減速度がより大きくなる傾向にある走り屋パターン、速度および加減速度がより小さくなる傾向にあるエコドライバパターン、前記走り屋パターンと前記エコドライバパターンの中間の傾向にある普通パターンの3種類のパターンのうちのいずれかに特定する態様としてもよい。
【0013】
また、請求項4のように、速さ関連情報が、少なくとも車両の加速度に関連する情報であって、運転特性特定手段が、少なくとも走行区間単位での車両の加速度に関連する情報をもとに、ドライバの運転特性を特定する態様としてもよい。車両の加速度に関連する情報に、ドライバごとの違いがより顕著に出易いことを本発明者は見出したため、請求項4のように、少なくとも走行区間単位での車両の加速度に関連する情報をもとにドライバの運転特性を特定すれば、ドライバの運転特性をより確実に精度良く特定することができる。
【0014】
また、請求項5のように、速さ関連情報が、車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度であって、運転特性特定手段が、走行区間単位での車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度をもとに、ドライバの運転特性を特定する態様としてもよい。
【0015】
車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度に、ドライバごとの違いが非常に顕著に出ることを本発明者は見出したため、請求項5のように、走行区間単位での車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度をもとにドライバの運転特性を特定すれば、ドライバの運転特性を非常に精度良く特定することができる。
【0016】
また、請求項6の構成によれば、走行区間における運転情報取得手段で取得した運転情報をもとに、当該走行区間における複数種類の速さ関連情報のうちの、運転特性特定手段での運転特性の特定に適していないと第1適否判定手段で判定した種類の当該走行区間における速さ関連情報については、運転特性特定手段での運転特性の特定に用いないことになる。よって、運転特性の特定に適していないデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0017】
また、運転特性特定手段が、複数の走行区間における速さ関連情報をもとにドライバの運転傾向の学習を行って、ドライバの運転傾向を複数種類のパターンに分けることによってドライバの運転特性を特定するものであって、請求項6のようにする場合には、請求項7のように、第1適否判定手段で運転特性の特定に適していないと判定した種類の速さ関連情報を除いた残りの走行区間における速さ関連情報については、学習時の重みを下げて学習を行うことが好ましい。
【0018】
上記学習を多くの速さ関連情報について行うほど運転特性の特定の精度は上がるが、運転特性の特定に適していないデータを除いた速さ関連情報については、運転特性の特定に適していないデータを最初から含まない速さ関連情報に比べ、利用することのできるデータが少ない分だけ、運転特性の特定の精度が劣る可能性がある。これに対して、請求項7の構成によれば、運転特性の特定に適していないデータを除いた速さ関連情報については、学習時の重みを下げて学習を行うので、運転特性の特定の精度の低下を抑えながら、運転特性の特定の精度を向上させることが可能になる。よって、ドライバの運転特性を非常に精度良く特定することが可能になる。
【0019】
また、請求項6のようにする場合には、請求項8のように、走行区間における運転情報取得手段で取得した操作情報(車両の速度変化に影響する運転操作に関する情報)をもとに、ドライバの運転特性が出にくい状況で行われる運転操作が行われたと判別した場合に、当該走行区間におけるその運転操作に対応する速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0020】
他にも、請求項9のように、走行区間における運転情報取得手段で取得した複数種類の速さ関連情報を、ドライバの運転特性が出にくい状況における速さ関連情報を判別する指標となる値である第1規定値と比較し、複数種類の速さ関連情報のうち第1規定値を満たさない速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0021】
さらに、請求項10のように、走行区間における運転情報取得手段で取得した複数種類の速さ関連情報を、運転特性の特定に適しているか否かを判別するため速さ関連情報の基準となる値である基準値と比較し、複数種類の速さ関連情報のうち基準値からの乖離度が所定量以上の速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0022】
また、請求項11の構成によれば、走行区間における運転情報取得手段で取得した運転情報をもとに、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと第2適否判定手段で判定した走行区間における速さ関連情報の全てについては、運転特性特定手段での運転特性の特定に用いないことになる。よって、運転特性の特定に適していないデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0023】
また、請求項11のようにする場合には、請求項12のように、走行区間における運転情報取得手段で取得した速さ関連情報を、ドライバの運転特性が出にくい状況における速さ関連情報を判別する指標となる値である第2規定値と比較し、速さ関連情報が第2規定値を満たさなかった場合に、当該走行区間における速さ関連情報の全てについて、運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0024】
また、請求項13の構成によれば、走行区間における道路情報取得手段で取得した道路情報をもとに、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと第3適否判定手段で判定した走行区間における速さ関連情報については、運転特性特定手段での運転特性の特定に用いないことになる。よって、運転特性の特定に適していないデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0025】
また、請求項13のようにする場合には、請求項14のように、走行区間における道路情報取得手段で取得した道路の勾配の情報をもとに、車両の走行中の道路の勾配が所定値以上であった場合に、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0026】
他にも、請求項15のように、走行区間における道路情報取得手段で取得した道路種別の情報をもとに、車両の走行中の道路が細街路であった場合に、当該走行区間における速さ関連情報が運転特性特定手段での運転特性の特定に適していないと判定することが好ましい。
【0027】
また、請求項16の経路探索装置によれば、前述のいずれかの運転特性特定装置で精度良く特定したドライバの運転特性に応じたコストを地図データの各リンクおよびノードに付与して、目的地に至る経路のうち、各リンクおよびノードに付与されたコストの合計が最小となる推奨経路を探索するので、ドライバの運転特性に応じた推奨経路を正確に探索することが可能となる。
【0028】
また、車両の速度および加速度がより大きくなる傾向にある走り屋パターンに運転傾向が該当するドライバは、前述のエコドライバパターンや普通パターンに運転傾向が該当するドライバに比べ、運行規制要因による車両の停止が大きなストレスとなり易いと考えられる。これに対して、請求項17の構成によれば、運転特性特定手段で特定したドライバの運転特性が走り屋パターンであった場合には、車両の停止回数がより少なくなる推奨経路を探索するので、走り屋パターンに運転傾向が該当するドライバのストレスを軽減することが可能になる。
【0029】
また、請求項17のように、車両の停止回数がより少なくなる推奨経路を探索する場合には、請求項18のように、信号交差点の数が多いリンクのコスト、一旦停止が存在するノードのコスト、一旦停止を含むリンクのコスト、および右左折する交差点のノードのコストのうちの少なくともいずれかを上げることによって、車両の停止回数がより少なくなる推奨経路を探索することが好ましい。
【0030】
さらに、前述の走り屋パターンに運転傾向が該当するドライバは、前述のエコドライバパターンや普通パターンに運転傾向が該当するドライバに比べ、渋滞による車両の停止や低速走行が大きなストレスとなり易いと考えられる。これに対して、請求項19の構成によれば、運転特性特定手段で特定したドライバの運転特性が走り屋パターンであった場合には、車両が渋滞箇所を通過する回数がより少なくなる推奨経路を探索するので、走り屋パターンに運転傾向が該当するドライバのストレスを軽減することが可能になる。
【0031】
また、請求項19のように、車両が渋滞箇所を通過する回数がより少なくなる推奨経路を探索する場合には、請求項20のように、渋滞箇所を含むリンクのコストを上げることによって、車両が渋滞箇所を通過する回数がより少なくなる推奨経路を探索することが好ましい。
【図面の簡単な説明】
【0032】
【図1】経路案内システム100の概略的な構成を示すブロック図である。
【図2】経路案内サーバ装置2の概略的な構成を示すブロック図である。
【図3】ナビゲーション装置3の概略的な構成を示すブロック図である。
【図4】制御部46での運転特性特定処理に関連する処理のフローの一例を示すフローチャートである。
【図5】有効データ判別処理のフローの一例を示すフローチャートである。
【図6】運転特性特定処理のフローの一例を示すフローチャートである。
【図7】フィッティングの一例を説明するための模式図である。
【図8】ドライバの運転する車両の速度の実測値の時間変化を示す図である。
【図9】ナビゲーション装置3の制御部46での経路案内関連処理のフローの一例を示すフローチャートである。
【図10】経路案内サーバ装置2の制御部24での経路探索に関連する処理のフローの一例を示すフローチャートである
【図11】経路探索処理のフローの一例を示すフローチャートである。
【図12】(a)〜(c)は、運転特性に応じたコスト定数の決定の一例を説明するための表である。
【図13】コスト定数と特性値との関係を示すグラフである。
【図14】各種の運転状況における自車両の速度変化を示す模式図である。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された経路案内システム100の概略的な構成を示すブロック図である。図1に示す経路案内システム100は、VICS(登録商標)センタ1、経路案内サーバ装置2、および車両に搭載されたナビゲーション装置3を含んでいる。なお、ナビゲーション装置3を搭載している車両を以降では自車両と呼ぶ。また、経路案内システム100が請求項の経路探索装置に相当する。
【0034】
VICSセンタ1は、渋滞箇所の情報、渋滞の度合いを示す渋滞度の情報、通行に要する時間を示す区間所要時間の情報、事故や工事などによる通行止め等の交通障害の情報、通行止めや臨時規制などの交通規制の情報等の道路交通情報を都道府県警察や道路管理者等から収集し、これらの道路交通情報を、ネットワークならびに道路に敷設されたビーコンや各地のFM放送局を介して配信するものである。なお、VICSセンタ1としては、周知のVICSセンタを用いる構成とすればよい。
【0035】
経路案内サーバ装置2は、サーバから構成されており、ネットワーク等の通信網を介してナビゲーション装置3から送信されてくる現在位置、目的地、および運転特性等の各種情報をもとに、目的地に達する最適な経路である推奨経路を探索し、探索結果(つまり、案内経路)をナビゲーション装置3に返信するものである。なお、経路案内サーバ装置2は、1つのサーバからなるものであってもよいし、複数のサーバからなっているものであってもよい。
【0036】
ここで、図2を用いて経路案内サーバ装置2の概略的な構成について説明を行う。図2は、経路案内サーバ装置2の概略的な構成を示すブロック図である。図2に示すように、経路案内サーバ装置2は、通信装置21、地図データベース(DB)22、情報記憶部23、および制御部24を備えている。
【0037】
通信装置21は、ネットワーク等の通信網を介してVICSセンタ1やナビゲーション装置3と通信を行うものである。例えば、通信装置21は、ナビゲーション装置3から送信されてくる現在位置、目的地、およびドライバ特性の情報を受信して制御部24に送る。また、通信装置21は、VICSセンタ1から送信されてくる道路交通情報を受信し、制御部24に送る。さらに、通信装置21は、制御部24から送られてくる案内経路の情報をナビゲーション装置3に送信する。
【0038】
なお、本実施形態では、通信装置21が通信網を介してVICSセンタ1やナビゲーション装置3との間で通信を行う構成を示したが、必ずしもこれに限らず、通信網を介さずにVICSセンタ1やナビゲーション装置3との間で通信を行う構成としてもよい。
【0039】
地図DB22は、地図データを格納しているデータベースであって、地図データには、少なくとも道路データが含まれる。また、道路データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。
【0040】
リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの形状情報、リンクの始端および終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、道路の勾配、および制限速度等の各データから構成される。
【0041】
一方、ノードデータは、地図上のノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0042】
情報記憶部23は、通信装置21を介して制御部24がVICSセンタ1から受信した道路交通情報やナビゲーション装置3から受信した現在位置、目的地、および運転特性の情報を格納しておくものである。
【0043】
制御部24は、通常のコンピュータとして構成されており、内部には周知のCPU、ROMやRAMなどのメモリ、I/O及びこれらの構成を接続するバスライン(いずれも図示せず)が備えられている。制御部24は、通信装置21、地図DB22、情報記憶部23から入力された各種情報に基づき、コスト決定処理および経路探索実行処理といった経路探索処理等を実行する。また、制御部24は、経路探索実行処理で得られた案内経路の情報を通信装置21からナビゲーション装置3へ送信させる処理を行う。
【0044】
例えば、コスト決定処理においては、制御部24が、通信装置21を介してナビゲーション装置3から得た運転特性の情報をもとに、運転特性に応じて、周知のダイクストラ法によるコスト計算におけるリンクコストやノードコスト(以下、コスト定数)を決定する。
【0045】
さらに、経路探索実行処理においては、制御部24は、通信装置21を介してナビゲーション装置3から得た現在位置および目的地の情報、ならびに地図DB22に格納されている地図データをもとに、目的地に達する最適な経路である推奨経路を探索する。また、経路探索実行処理においては、上記コスト決定処理で決定されたコスト定数を用いて周知のダイクストラ法によるコスト計算を行い、推奨経路を探索するものとする。なお、経路案内サーバ装置2でのコスト決定処理および経路探索実行処理の詳細については後述する。
【0046】
また、本実施形態では、経路案内サーバ装置2が道路交通情報源としてVICSセンタ1を用いる構成を示したが、必ずしもこれに限らない。例えば、VICSセンタ1以外の情報センタや車両に搭載された端末機を道路交通情報源として用い、道路交通情報を取得する構成としてもよい。
【0047】
ナビゲーション装置3は、前述したように車両に搭載されるものであって、経路探索や経路案内等のナビゲーション機能を有している。ここで、図3を用いてナビゲーション装置3の概略的な構成について説明を行う。図3は、ナビゲーション装置3の概略的な構成を示すブロック図である。図3に示すようにナビゲーション装置3は、位置検出器31、地図データ入力器36、記憶媒体37、外部メモリ38、表示装置39、音声出力装置40、操作スイッチ群41、リモートコントロール端末(以下リモコン)42、リモコンセンサ43、外部入力部44、通信装置45、および制御部46を備えている。
【0048】
位置検出器31は、自車両の加速度を検出する加速度センサ32、自車両の鉛直方向周りの角速度を検出するジャイロスコープ33、各転動輪の回転速度から自車両の速度を検出する車輪速センサ34、および人工衛星からの電波に基づいて自車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機35を有しており、定期的に自車両の現在位置の検出を行う。
【0049】
また、これらの各センサ32〜35は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、各センサの精度によっては位置検出器31を上述した内の一部で構成してもよく、さらに、図示しない地磁気センサ、ステアリングの回転センサ、車速センサ等を用いてもよい。
【0050】
地図データ入力器36は、記憶媒体37が装着され、その記憶媒体37に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。なお、記憶媒体37としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0051】
また、地図データには、前述した道路データ、背景データ、および文字データなどが含まれるものとする。例えば、背景データは、地図上の各施設や地形等と、それに対応する地図上の座標とを関連付けたデータである。なお、施設に関しては、各種施設の種類、名称、住所のデータなども含まれる。また、文字データは、地名、施設名、道路名等を地図上に表示するためのデータであって、その表示すべき位置に対応する座標データと関連付けられている。
【0052】
外部メモリ38は、書き込み可能なHDD等の大容量記憶装置である。外部メモリ38には大量のデータや電源をオフしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器36からコピーして利用したりする等の用途がある。なお、外部メモリ38は、比較的記憶容量の小さいリムーバブルなメモリであってもよい。
【0053】
表示装置39は、車両の走行を案内するための地図、および目的地選択画面等を表示するものであって、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。また、音声出力装置40は、スピーカ等から構成され、制御部46の指示に基づいて、経路案内時の案内音声等を出力する。
【0054】
操作スイッチ群41は、例えば表示装置39と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御部46へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。また、操作スイッチ群41は、出発地および目的地を設定するためのスイッチを含んでいる。そのスイッチを操作することによって、ユーザ(つまり、自車両の乗員)は、予め登録しておいた地点、施設名、電話番号、住所などから、出発地および目的地を設定することができる。
【0055】
リモコン42には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ43を介して各種指令信号を制御部46に入力することにより、操作スイッチ群41と同じ機能を制御部46に対して実行させることが可能である。
【0056】
外部入力部44は、車両の各種センサ群から車両の運転操作に関する情報(以下、操作情報)や車両の挙動に関する情報(以下、挙動情報)などの走行状況の情報(以下、走行状況情報)を制御部46が取得するためのインターフェースである。また、外部入力部44には、例えばCAN(controller areanetwork)などの通信プロトコルに準拠した車内LAN等から走行状況情報が入力されてくるものとすればよい。
【0057】
なお、操作情報としては、例えばアイドルスイッチから得られるアクセルペダルの操作のON/OFFの情報、アクセル開度センサから得られるアクセル開度の情報、スロットル開度センサから得られるスロットル開度の情報、エンジン回転数センサから得られるエンジン回転数の情報、ブレーキスイッチから得られるブレーキペダルの操作のON/OFFの情報、およびブレーキストロークセンサから得られるブレーキペダルの踏み込み量の情報などがある。また、挙動情報としては、加速度センサ32から得られる車両の加減速度の情報、および車輪速センサ34から得られる車両の速度の情報などがある。なお、走行状況情報が請求項の運転情報に相当する。
【0058】
通信装置45は、ネットワーク等の通信網を介して経路案内サーバ装置2との間で通信を行うものである。また、通信装置45は、無線通信を介してネットワークに接続するものとする。よって、例えば通信装置45は、通信モジュールを介してネットワークに接続する構成としてもよい。ここで言うところの通信モジュールとしては、例えば車両に搭載されるDCM(data communication module)等のテレマティクス通信に用いられる車載通信モジュールや例えばBluetooth(登録商標)等で接続した携帯電話機等がある。
【0059】
制御部46は通常のコンピュータとして構成されており、内部には周知のCPU、ROMやRAMなどのメモリ、I/O及びこれらの構成を接続するバスライン(いずれも図示せず)が備えられている。制御部46は、位置検出器31、地図データ入力器36、外部メモリ38、操作スイッチ群41、リモコンセンサ43、外部入力部44、通信装置45から入力された各種情報に基づき、ナビゲーション機能としての処理(例えば、地図縮尺変更処理、メニュー表示選択処理、マップマッチング処理、目的地設定処理、経路案内関連処理、現在位置修正処理、表示画面変更処理、音量調整処理等)や運転特性特定処理等を実行する。なお、制御部46が請求項の運転特性特定装置に相当する。
【0060】
例えば、運転特性特定処理では、外部入力部44を介して取得した走行状況情報や位置検出器31から入力される自車両の現在位置の情報や地図データ入力器36から入力される地図データをもとに、自車両を運転中のドライバの運転傾向(つまり、運転特性)を特定する。
【0061】
ここで、図4を用いて、制御部46での運転特性特定処理に関連する処理についての説明を行う。なお、図4は、制御部46での運転特性特定処理に関連する処理のフローの一例を示すフローチャートである。また、図4のフローは、例えば自車両のイグニッションスイッチがオンされたときに開始されるものとすればよい。
【0062】
まず、ステップS1では、制御部46が外部入力部44を介して取得した走行状況情報を所定タイミングで記憶し、ステップS2に移る。よって、制御部46は、請求項の運転情報取得手段に相当する。なお、制御部46が取得した走行状況情報については、制御部46のEEPROMやRAM等の書き換え可能なメモリに記憶する構成としてもよいし、外部メモリ38に記憶する構成としてもよい。また、ここで言うところの所定タイミングとは、予め定められた時間ごとや予め定められた走行距離ごとなどであって、任意に設定可能なものとする。
【0063】
なお、本実施形態では、少なくとも加速度センサ32から得られる自車両の加減速度の情報、および車輪速センサ34から得られる自車両の速度の情報が走行状況情報に含まれるものとして以降の説明を続ける。また、この自車両の速度の情報および加減速度の情報が請求項の速さ関連情報に相当する。
【0064】
ステップS2では、ステップS1で記憶した走行状況情報を走行区間単位に分割する分割処理を制御部46が行い、ステップS3に移る。なお、ここで言うところの走行区間とは、自車両が発進してから停止するまでの区間(以下、GO−STOP区間)を示している。また、GO−STOP区間は、例えば車輪速センサ34から得られた車両の速度の情報をもとに判別するものとする。詳しくは、自車両の速度が車輪速センサ34で検出可能な速度の値(以下、限界値)を超えてからその限界値に達するまでをGO−STOP区間と判別するものとする。
【0065】
ステップS3では、有効データ判別処理を制御部46が行い、ステップS4に移る。ここで、図5のフローチャートを用いて、有効データ判別処理の概略について説明を行う。なお、図5は、有効データ判別処理のフローの一例を示すフローチャートである。また、この有効データ判別処理は、ステップS2の分割処理で得られた各GO−STOP区間について行われる。
【0066】
まず、ステップS31では、対象とするGO−STOP区間が高速道路に該当するか否かを判定する。なお、GO−STOP区間が高速道路に該当するか否かは、位置検出器31から入力される自車両の現在位置の情報や地図データ入力器36から入力される地図データのうちの道路種別の情報をもとに判定する構成とすればよい。
【0067】
そして、対象とするGO−STOP区間が高速道路に該当すると判定した場合(ステップS31でYES)には、運転特性の特定に適していないものとして、ステップS33に移る。また、高速道路に該当すると判定しなかった場合(ステップS31でNO)には、ステップS32に移る。
【0068】
ステップS32では、車輪速センサ34から得られた自車両の速度の情報をもとに、対象とするGO−STOP区間の走行状況情報において、自車両の速度が所定値(例えば30km/h)を超えたか否かを判定する。なお、ここで言うところの所定値とは、速度の遅い先行車両に追従していたり、渋滞に巻き込まれていたりするなど、ドライバの運転特性が出にくい状況におけるデータを判別するための閾値であって、任意に設定可能なものである。本実施形態では、前述したように所定値を30km/hと設定する場合を例に挙げて説明を行う。
【0069】
そして、対象とするGO−STOP区間の走行状況情報において、自車両の速度が30km/hを超えたと判定した場合(ステップS32でYES)には、ステップS34に移る。また、自車両の速度が30km/hを超えたと判定しなかった場合(ステップS32でNO)には、運転特性の特定に適していないものとして、ステップS33に移る。よって、制御部46は請求項の第2適否判定手段に相当する。また、ステップS33では、対象とするGO−STOP区間の走行状況情報を不要なデータとして消去し、ステップS4に移る。
【0070】
ステップS34では、車輪速センサ34から得られた自車両の速度の情報および加速度センサ32から得られた自車両の加減速度の情報をもとに、対象とするGO−STOP区間の走行状況情報における自車両の発進時からの所定期間の平均加速度(以下、発進時平均加速度)、自車両の停止時までの所定期間の平均減速度(以下、停車時平均減速度)、最大加速度、最大減速度、および最高到達速度の5種類のデータ(以下、GO−STOPデータ)を算出し、ステップS35に移る。
【0071】
なお、本実施形態では、自車両の発進時からの所定期間とは、例えば自車両の発進時から自車両の速度が30km/hに達するまでの期間とする。また、自車両の停止時までの所定期間とは、例えば自車両の速度が30km/hを下回ってから30km/hを超えずに自車両が停止するまでの期間とする。
【0072】
ステップS35では、自車両の発進時からの所定期間にブレーキが踏まれたか否かを判定する。なお、ブレーキが踏まれたか否かは、対象とするGO−STOP区間の走行状況情報のうちの、例えばブレーキスイッチから得られたブレーキペダルの操作のON/OFFの情報をもとに判定する構成とすればよい。
【0073】
そして、発進時からの所定期間(つまり、発進期間)にブレーキが踏まれたと判定した場合(ステップS35でYES)には、例えば発進直後に速度の遅い先行車両に前方を塞がれたりするなどして、ドライバの運転傾向に従った加速が行われなかった(つまり、運転特性の特定に適していない)ものとして、ステップS36に移る。また、発進時からの所定期間にブレーキが踏まれたと判定しなかった場合(ステップS35でNO)には、ステップS37に移る。また、ステップS36では、対象とするGO−STOP区間のGO−STOPデータのうちの、発進時平均加速度のデータを消去し、ステップS37に移る。
【0074】
ステップS37では、自車両の停止時までの所定期間にアクセルが踏まれたか否かを判定する。なお、アクセルが踏まれたか否かは、対象とするGO−STOP区間の走行状況情報のうちの、例えばアイドルスイッチから得られたアクセルペダルの操作のON/OFFの情報をもとに判定する構成とすればよい。
【0075】
そして、停止時までの所定期間(つまり、停車期間)にアクセルが踏まれたと判定した場合(ステップS37でYES)には、例えば停車直前に先行車両に追従するなどしてドライバの運転傾向に従った減速が行われなかった(つまり、運転特性の特定に適していない)ものとして、ステップS38に移る。また、停止時までの所定期間にアクセルが踏まれたと判定しなかった場合(ステップS37でNO)には、ステップS39に移る。また、ステップS38では、対象とするGO−STOP区間におけるGO−STOPデータのうちの、停車時平均減速度のデータを消去し、ステップS39に移る。よって、制御部46は請求項の第1適否判定手段に相当する。
【0076】
ステップS39では、発進時平均加速度のデータ、もしくは停車時平均減速度のデータのいずれかのデータの消去があった場合(ステップS39でYES)には、ステップS40に移る。また、いずれのデータの消去もなかった場合(ステップS39でNO)には、ステップS4に移る。
【0077】
ステップS40では、対象とするGO−STOP区間におけるGO−STOPデータ(つまり、消去されていないデータである最大加速度、最大減速度、および最高到達速度のデータ)の後述の学習時における重みを下げて、ステップS4に移る。
【0078】
図4に戻って、ステップS4では、ステップS3の分別処理で得られた各GO−STOPデータを蓄積し、ステップS5に移る。なお、ステップS3の分別処理で得られた各GO−STOPデータについては、制御部46のEEPROMやRAM等の書き換え可能なメモリに記憶する構成としてもよいし、外部メモリ38に記憶する構成としてもよい。また、蓄積したGO−STOPデータが一定量以上となった場合に、古いデータから消去していく構成としてもよい。
【0079】
なお、自車両を利用するドライバが複数存在する場合に、運転中のドライバを例えば操作スイッチ群41やリモコン42などを介して設定可能とするとともに、各ドライバを特定する識別情報(例えばユーザIDとする)にGO−STOPデータを紐付けするなどして、ドライバごとにGO−STOPデータを管理する構成としてもよい。この場合、ドライバごとのGO−STOPデータをもとに、ドライバごとの運転特性を特定する構成とすればよい。
【0080】
ステップS5では、運転特性特定処理を行って、ステップS1に戻り、フローを繰り返す。ここで、図6のフローチャートおよび図7の模式図を用いて、運転特性特定処理の概略について説明を行う。なお、図6は、運転特性特定処理のフローの一例を示すフローチャートである。また、図7は、フィッティングの一例を説明するための模式図である。
【0081】
まず、ステップS51では、GO−STOPデータの各パラメータの分布を3種類の特性モデルにフィッティングさせる処理を制御部46が行う。なお、ここで言うところのGO−STOPデータの各パラメータには、前述した発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度が該当する。また、ステップS3の有効データ判別処理において、発進時平均加速度や停車時平均減速度がGO−STOPデータから消去されていた場合には、消去されなかった残りのデータが該当することになる。
【0082】
さらに、ここで言うところの3種類の特性モデルとは、自車両の速度および加速度がより大きくなる傾向にある走り屋パターンのモデル(図7のモデルA参照)、速度および加速度がより小さくなる傾向にあるエコドライバパターンのモデル(図7のモデルC参照)、走り屋パターンとエコドライバパターンの中間の傾向にある普通パターンのモデル(図7のモデルB参照)の3種類である。
【0083】
また、上記3種類の特性モデルには、それぞれに該当するパターンのドライバの運転傾向を反映した発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度の各パラメータが予め設定されているものとする。なお、特性モデルに予め設定されている各パラメータは、走り屋パターン、普通パターン、エコドライバパターンの各パターンに該当するドライバの実測値やシミュレーション等によって任意に設定可能なものである。
【0084】
ステップS52では、3種類の特性モデルへのフィッティングの結果、最も誤差の小さい特性モデルを選択し、選択したモデルに該当するパターンをドライバの運転特性として特定する。フィッティングでは、例えばGO−STOPデータの各パラメータの値と特性モデルの各パラメータの値との差分を計算し、その差分の絶対値の合計が最も小さくなる特性モデルを最も誤差の小さい特性モデルとして選択する構成とすればよい。
【0085】
例えば、図7の例では、走り屋パターンのモデルAの各パラメータの分布にGO−STOPデータの各パラメータの分布が最も一致しており、フィッティングの誤差が最も小さいので、破線で示す円で囲ったようにモデルAが選択され、ドライバの運転特性が走り屋パターンと特定されることになる。
【0086】
なお、ステップS3の有効データ判別処理において一部のデータが消去されているGO−STOPデータについては、例えば特性モデルとの間で、残ったパラメータ同士の差分を計算し、その差分の絶対値の合計が最も小さくなる特性モデルを最も誤差の小さい特性モデルとして選択する構成とすればよい。
【0087】
また、フィッティングの処理は、蓄積されている各GO−STOPデータについて行い、各GO−STOPデータについて特定した運転特性を学習してドライバの運転特性を最終的に特定する。例えば、5種類のパラメータが全て揃ったGO−STOPデータについては、最も大きな重みを設定し、4種類のパラメータが揃ったGO−STOPデータについては、それに次ぐ大きさの重みを設定し、3種類のパラメータしかないGO−STOPデータについては、最も小さな重みを設定する。
【0088】
そして、各GO−STOPデータについてのフィッティングの処理の結果を総合し、より重みの大きいGO−STOPデータについて特定された数がより多かった前述のパターンをドライバの運転特性として最終的に特定し、ステップS1に戻る。よって、制御部46が請求項の運転特性特定手段に相当する。また、図4のフローは、例えば自車両のイグニッションスイッチがオフされたときに終了するものとしてもよい。
【0089】
なお、特定した運転特性については、制御部46のEEPROMやRAM等の書き換え可能なメモリや外部メモリ38に記憶する。また、本実施形態では、運転特性特定処理で特定した運転特性の情報は、例えば外部メモリ38に記憶するものとして以降の説明を続ける。なお、自車両を利用するドライバが複数存在する場合には、各ドライバを特定する識別情報(例えばユーザIDとする)をそれぞれのドライバの運転特性に紐付けして運転特性の情報を記憶する構成とすればよい。
【0090】
また、本実施形態では、発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度の5種類のパラメータを用いて運転特性を特定する構成を示したが、必ずしもこれに限らない。例えば、自車両の速度に関連する情報(例えば最高到達速度)、自車両の加速度に関連する情報(例えば、発進時平均加速度、最大加速度)、および自車両の減速度に関連する情報(例えば、停車時平均減速度、最大減速度)のうちの少なくともいずれかを用いて運転特性を特定する構成としてもよい。
【0091】
なお、自車両の速度、加速度、および減速度に関連する情報のうちの少なくともいずれかを用いて運転特性を特定する構成とする場合には、少なくとも自車両の加速度に関連する情報を用いて運転特性を特定する構成とすることが好ましい。これは、自車両の加速度に関連する情報にドライバごとの違いがより顕著に出易く、自車両の加速度に関連する情報をもとにドライバの運転特性を特定すればドライバの運転特性をより確実に精度良く特定することができるためである。
【0092】
ここで、図8(a)〜図8(c)を用いて、自車両の加速度に関連する情報にドライバごとの違いがより顕著に出易いことの説明を行う。なお、図8(a)〜図8(c)は、ドライバの運転する車両の速度(車速)の実測値の時間変化を示している。また、図8(a)が走り屋パターンに該当するドライバについての実測値、図8(b)が普通パターンに該当するドライバについての実測値、図8(c)がエコドライバパターンに該当するドライバについての実測値を示している。また、図中の破線が発進時平均加速度を表している。図8(a)〜図8(c)から明らかなように、発進時平均加速度は走り屋パターン、普通パターン、エコドライバパターンの各パターンで明らかに異なっており、自車両の加速度に関連する情報にドライバごとの違いがより顕著に出易いことは明らかである。
【0093】
なお、自車両の速度や加減速に関連する情報に限らず、フットブレーキとエンジンブレーキとを利用している比率等を利用して運転特性を分ける構成としてもよい。一例として、エンジンブレーキの使用率が高いドライバはエコドライバパターンとすればよい。
【0094】
また、経路案内関連処理では、制御部46は、運転特性特定処理で特定したドライバの運転特性の情報、位置検出器31から入力される自車両の現在位置の情報、操作スイッチ群41やリモコンセンサ43から入力される目的地の情報等の各種情報を、通信装置45を介して経路案内サーバ装置2に送信し、経路探索を要求する。そして、当該各種情報をもとに経路案内サーバ装置2で経路探索処理を行って得られた案内経路の情報(以下、経路情報)を、通信装置45を介して受信し、受信した経路情報に従って、制御部46が経路案内を開始する。
【0095】
ここで、図9を用いて、制御部46での経路案内関連処理についての説明を行う。なお、図9は、制御部46での経路案内関連処理のフローの一例を示すフローチャートである。また、図9のフローは、例えば操作スイッチ群41やリモコン42を介してドライバ等のユーザから経路案内の開始を要求する旨の操作入力を受け付けたときに開始されるものとすればよい。
【0096】
まず、ステップS61では、位置検出器31から入力される自車両の現在位置の情報を取得し、ステップS62に移る。続いて、ステップS62では、目的地が設定済みか否かを判定する。なお、目的地が設定済みか否かについては、操作スイッチ群41やリモコンセンサ43から目的地の情報が入力されたか否かによって判定する構成とすればよい。そして、目的地が設定済みと判定した場合(ステップS62でYES)には、ステップS63に移る。また、目的地が設定済みと判定しなかった場合(ステップS62でNO)には、ステップS61に戻ってフローを繰り返す。なお、目的地が設定済みと判定しなかった場合には、目的地の設定を促す表示を表示装置39に行わせたり、目的地の設定を促す音声出力を音声出力装置40に行わせたりすることによって、目的地の設定をユーザに促す構成としてもよい。
【0097】
ステップS63では、運転特性特定処理で特定したドライバの運転特性の情報を外部メモリ38から読み出し、ステップS64に移る。なお、自車両を利用するドライバが複数存在し、各ドライバを特定するユーザIDがそれぞれのドライバの運転特性に紐付けして運転特性の情報が記憶されている場合には、ユーザIDをもとに目的とするドライバについての運転特性の情報を読み出す構成とすればよい。
【0098】
ステップS64では、取得済みの現在位置、目的地、および運転特性の情報を、通信装置45を介して経路案内サーバ装置2に送信し、ステップS65に移る。ステップS65では、経路案内サーバ装置2から経路案内情報を受信した場合(ステップS65でYES)には、ステップS66に移る。また、経路案内サーバ装置2から経路案内情報を受信していない場合(ステップS65でNO)には、ステップS65のフローを繰り返す。ステップS66では、経路案内サーバ装置2から受信した経路案内情報に従って経路案内を開始し、フローを終了する。
【0099】
続いて、図10を用いて、経路案内サーバ装置2の制御部24での経路探索に関連する処理についての説明を行う。なお、図10は、経路案内サーバ装置2の制御部24での経路探索に関連する処理のフローの一例を示すフローチャートである。また、図10のフローは、例えば経路案内サーバ装置2とナビゲーション装置3との間での通信が確立したときに開始されるものとすればよい。
【0100】
ステップS100では、ナビゲーション装置3から現在位置、目的地、および運転特性の情報を受信した場合(ステップS100でYES)には、ステップS200に移る。また、ナビゲーション装置3から現在位置、目的地、および運転特性の情報を受信していない場合(ステップS100でNO)には、ステップS100を繰り返す。
【0101】
ステップS200では、経路探索処理を行ってステップS300に移る。ここで、図11のフローチャートを用いて、経路探索処理の概略について説明を行う。なお、図11は、経路探索処理のフローの一例を示すフローチャートである。
【0102】
まず、ステップS201では、コスト決定処理を行って、ステップS202に移る。コスト決定処理では、ナビゲーション装置3から得た運転特性の情報、地図DB22に格納されている地図データ、およびVICSセンタ1から受信した渋滞箇所や渋滞度の情報をもとにコスト定数を決定する。よって、制御部24が請求項の渋滞情報取得手段に相当する。
【0103】
ここで、図12(a)〜図12(c)を用いて、運転特性に応じたコスト定数の決定の一例についての説明を行う。なお、図12(a)は、運転特性と信号交差点の数とに応じたリンクコスト(つまり、コスト定数)の一例を示す表である。また、図12(b)は、運転特性と渋滞の度合いとに応じたリンクコストの一例を示す表である。そして、図12(c)は、運転特性と交差点の右左折とに応じたノードコスト(つまり、コスト定数)の一例を示す表である。また、コスト決定処理においては、運転特性に応じた燃費や電費といった走行エネルギーの消費効率を考慮したコスト定数が決定されるものとし、図12(a)〜図12(c)の表についても、この走行エネルギーの消費効率を考慮してコスト定数が変更されている。
【0104】
例えば、図12(a)に示すように、運転特性が走り屋パターン(図12(a)〜図12(c)の「走り屋」)の場合には、信号交差点の数(つまり、信号頻度)が「大」のリンクについては、リンクコストを大きく上げて設定する。また、信号頻度が「中」のリンクについては、リンクコストを小さく上げて設定する。さらに、信号頻度が「小」のリンクについては、リンクコストを中ぐらい下げて設定する。なお、ここで言うところの大、中、小とは、相対的な量であって、詳細な量については任意に設定可能なものとし、以降についても同様のものとする。また、コスト定数の上げ下げは、例えば基準値を基準として上げ下げするものとすればよい。
【0105】
また、運転特性が普通パターン(図12(a)〜図12(c)の「普通」)の場合には、信号頻度が「大」および「中」のリンクについては、リンクコストを小さく上げて設定する。さらに、信号頻度が「小」のリンクについては、リンクコストを基準値のまま設定する(つまり、変動なし)。また、運転特性がエコドライバパターン(図12(a)〜図12(c)の「エコドライバ」)の場合には、信号頻度が「大」のリンクについては、リンクコストを小さく上げて設定する。さらに、信号頻度が「中」および「小」のリンクについては、リンクコストを基準値のまま設定する。
【0106】
続いて、図12(b)に示すように、運転特性が走り屋パターンの場合には、渋滞度合い(つまり、渋滞具合)が「渋滞」のリンクについては、リンクコストを大きく上げて設定する。また、渋滞具合が「混雑」のリンクについては、リンクコストを中ぐらい上げて設定する。さらに、渋滞具合が「順調」のリンクについては、リンクコストを中ぐらい下げて設定する。なお、渋滞具合については、VICSセンタ1の渋滞度の評価基準に従う構成とすればよい。
【0107】
また、運転特性が普通パターンの場合には、渋滞具合が「渋滞」および「混雑」のリンクについては、リンクコストを小さく上げて設定する。さらに、渋滞具合が「順調」のリンクについては、リンクコストを基準値のまま設定する。また、運転特性がエコドライバパターンの場合には、渋滞具合が「渋滞」のリンクについては、リンクコストを小さく上げて設定する。また、渋滞具合が「混雑」および「順調」のリンクについては、リンクコストを基準値のまま設定する。
【0108】
さらに、図12(c)に示すように、運転特性が走り屋パターンの場合には、交差点の右左折の方向(つまり、右左折)が「右折」のノードについては、ノードコストを中ぐらい上げて設定する。また、右左折が「左折」のノードについては、ノードコストを小さく上げて設定する。さらに、運転特性が普通パターンの場合には、右左折が「右折」のノードについては、ノードコストを小さく上げて設定する一方、「左折」のノードについては、ノードコストを基準値のまま設定する。また、運転特性がエコドライバパターンの場合には、右左折が「右折」のノードについても「左折」のノードについても、ノードコストを基準値のまま設定する。
【0109】
なお、本実施形態では、運転特性が走り屋パターンの場合に、信号交差点の数が多いリンクのリンクコスト、渋滞箇所を含むリンクのリンクコスト、右左折する交差点のノードのノードコストを上げる構成を示したが、必ずしもこれに限らない。例えば、運転特性が走り屋パターンの場合に、一旦停止が存在するノードのノードコストや一旦停止を含むリンクのリンクコストを上げる構成としてもよい。なお、一旦停止が存在するノードや一旦停止を含むリンクについては、地図DB22に格納されている地図データをもとに判別する構成とすればよい。
【0110】
また、本実施形態では、ドライバの運転特性を走り屋パターン、普通パターン、エコドライバパターンの3種類のパターンに分ける構成を示したが、必ずしもこれに限らず、2種類のパターンに分ける構成としてもよいし、3種類以上のパターンに分ける構成としてもよい。
【0111】
なお、3種類以上のパターンに分ける場合に、例えば「発進時平均加速度=XXX」、「停車時平均減速度=XXX」、「最高到達速度=XXX」といったように、自車両の速度や加減速度に関連する情報の数値ごとに分ける構成としてもよい。また、この場合には、例えば蓄積されている各GO−STOPデータのうちの自車両の速度や加減速度に関連する情報の数値の平均値(以下、特性値)を、ドライバの運転特性の情報として扱う構成としてもよい。
【0112】
さらに、上述したように、特性値をドライバの運転特性の情報として扱う場合には、コスト決定処理において、例えば図13のグラフで示すような一次関数に基づいて、特性値に応じたコスト定数を決定する構成としてもよい。なお、図13は、コスト定数と特性値との関係を示すグラフである。
【0113】
図11に戻って、ステップS202では、コスト決定処理で決定したコスト定数に基づいて、経路探索実行処理を行って、ステップS300に移る。経路探索実行処理では、距離優先、時間優先、走行エネルギー消費効率優先等の予め設定された探索条件を満たす最適な経路を探索する。このような自動的に最適な経路を探索する手法は、例えば、周知のダイクストラ法によるコスト計算、すなわち、コスト定数(つまり、リンクコストやノードコスト)を用いた評価値計算によって行う。ここで、本実施形態のコスト計算について簡単に説明する。
【0114】
なお、本実施形態では、走行エネルギー消費効率優先を探索条件として、前述した走行エネルギーの消費効率を考慮したコスト定数を用いて経路が探索されるものとする。また、本実施形態では、ナビゲーション装置3から受信した現在位置の情報が示す位置を出発地として説明を続けるが、ナビゲーション装置3において、操作スイッチ群41やリモコン42を介してユーザから設定入力された地点を出発地とする構成としてもよい。なお、この場合には、現在位置の情報の代わりに上記設定入力された地点の情報をナビゲーション装置3から経路案内サーバ装置2に送信する構成とすればよい。
【0115】
まず、出発地から目的地までをカバーするリンクデータおよびノードデータを地図DB22から読み出し、制御部24のRAM等のメモリに記憶する。そして、その記憶されたリンクデータおよびノードデータを用いて、出発地から目的地までのリンクコストおよびノードコストの合計値が最小となる経路を探索する。なお、地図DB22が請求項の地図データ記憶手段に相当し、制御部24が請求項の経路探索手段に相当する。
【0116】
すなわち、経路探索実行処理では、コスト定数を出発地から目的地までのリンクデータおよびノードデータに乗じ、出発地から目的地まで累積した累積値が最小となる経路を探索する。このとき、運転特性に応じてコスト決定処理で決定されたコスト定数を用いることによって、運転特性に応じた案内経路が設定されることになる。
【0117】
例えば、図12(a)〜図12(c)に示すように、ドライバの運転特性が走り屋パターンであった場合には、信号交差点の数が多いリンクのコスト定数、右左折する交差点のノードのコスト定数を大きくしたり、渋滞箇所を含むリンクのコスト定数を大きくしたりすることによって、車両の停止回数がより少なくなる経路や車両が渋滞箇所を通過する回数がより少なくなる経路が探索されるように設定して、走り屋パターンに運転傾向が該当するドライバのストレスを軽減できるようにする。
【0118】
図10に戻って、ステップS300では、経路探索処理を行って得られた案内経路の情報(つまり、経路情報)を、通信装置21を介してナビゲーション装置3に送信し、フローを終了する。
【0119】
以上の構成によれば、自車両が発進してから停止するまでの区間であるGO−STOP区間単位での発進時平均加速度、停車時平均減速度、最大加速度、最大減速度、および最高到達速度(つまり、GO−STOPデータ)をもとに、ドライバの運転特性を特定することになるので、一旦停止箇所や信号等の車両の運行を規制する運行規制要因による停車時間における情報を排除した情報をもとに、ドライバの運転特性を特定することができる。従って、運行規制要因の影響を受けずに、ドライバの運転特性を精度良く特定することが可能になる。
【0120】
また、以上の構成によれば、有効データ判別処理において、運転特性の特定に適していないと判別したGO−STOP区間におけるGO−STOPデータの全てを運転特性の特定に用いないようにしたり、運転特性の特定に適していないと判別したGO−STOPデータのうちの一部のデータを運転特性の特定に用いないようにしたりする。よって、ドライバの運転特性が出にくい状況におけるGO−STOPデータを除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。
【0121】
ここで、以上の作用効果について、具体的に図14を用いて説明を行う。図14は、各種の運転状況における自車両の速度変化を示す模式図である。なお、図14中のD〜Kのグラフの縦軸が自車両の速度を表しており、横軸が時間を表している。また、D〜Kのグラフ中の破線は、所定値(本実施形態の例では30km/h)を表している。
【0122】
なお、Dのグラフは、先行車両が存在せずにドライバの運転傾向に従った走行が行われた場合のタイプ(以下、通常タイプ)のグラフである。また、Eのグラフは、加速の遅い先行車両が存在するタイプ(以下、第1追従タイプ)のグラフである。さらに、Fのグラフは、自車両の加速途中で速度の遅い先行車両に前を塞がれたタイプ(以下、第2追従タイプ)のグラフである。また、Gのグラフは、交差点などで一時減速するタイプ(以下、二山タイプ)のグラフである。さらに、Hのグラフは、渋滞に巻き込まれたタイプ(以下、渋滞タイプ)のグラフである。また、Iのグラフは、先行車両の急停止に合わせて急停止したタイプ(以下、急ブレーキタイプ)のグラフである。さらに、Jのグラフは、赤信号等によって加速が途中で終わるタイプ(以下、途中停止タイプ)のグラフである。また、Kのグラフは、信号などで何度も止まりそうになるがなかなか止まらないタイプ(ギザギザタイプ)のグラフである。
【0123】
例えば、前述した有効データ判別処理では、GO−STOP区間における自車両の速度が30km/hを超えたと判定しなかった場合に、運転特性の特定に適していないとして当該GO−STOP区間におけるGO−STOPデータの全てを運転特性の特定に用いないことになる。これによれば、自車両の速度が30km/hを超えることがないHの渋滞タイプおよびJの途中停止タイプのGO−STOP区間におけるGO−STOPデータについては、GO−STOPデータ全てを運転特性の特定に用いないので、ドライバの運転特性が出にくい状況におけるGO−STOPデータを除いて運転特性の特定を行うことによって、ドライバの運転特性を精度良く特定することが可能になる。
【0124】
さらに、前述した有効データ判別処理では、GO−STOP区間における発進期間にブレーキが踏まれたと判定した場合に、運転特性の特定に適していないとして当該GO−STOP区間におけるGO−STOPデータのうちの発進時平均加速度を運転特性の特定に用いないことになる。
【0125】
これによれば、自車両の速度が30km/hに達する前にブレーキが踏まれて加速度が大幅に低下しているEの第1追従タイプおよびFの第2追従タイプのGO−STOP区間におけるGO−STOPデータについては、発進時平均加速度を運転特性の特定に用いないので、ドライバの運転特性が出にくい状況における発進時平均加速度を除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。なお、ここでは、自車両の速度が30km/hに達する前にブレーキが踏まれたという操作情報が請求項の操作情報に相当し、発進時平均加速度が請求項の運転操作に対応する速さ関連情報に相当する。
【0126】
他にも、前述した有効データ判別処理では、GO−STOP区間における停車期間にアクセルが踏まれたと判定した場合に、運転特性の特定に適していないとして当該GO−STOP区間におけるGO−STOPデータのうちの停車時平均減速度を運転特性の特定に用いないことになる。
【0127】
これによれば、自車両の速度が30km/hを下回ってから30km/hを超えずに自車両が停止するまでの期間にアクセルが踏まれて減速度が大幅に低下しているEの第1追従タイプのIのグラフは、先行車両の急停止に合わせて急停止したタイプ(以下、急ブレーキタイプ)ので、ドライバの運転特性が出にくい状況における停車時平均減速度を除いて運転特性の特定を行うことによって、ドライバの運転特性をさらに精度良く特定することが可能になる。なお、ここでは、自車両の速度が30km/hを下回ってから30km/hを超えずに自車両が停止するまでの期間にアクセルが踏まれたという操作情報が請求項の操作情報に相当し、停車時平均減速度が請求項の運転操作に対応する速さ関連情報に相当する。
【0128】
また、本実施形態で説明した以外にも、停車時平均減速度が基準値と比較して乖離度が所定量(任意に設定可能)以上であって極端に大きいことを指標にして、Iの急ブレーキタイプのGO−STOP区間におけるGO−STOPデータについては、停車時平均減速度を運転特性の特定に用いないで、ドライバの運転特性が出にくい状況における停車時平均減速度を除いて運転特性の特定を行う構成としてもよい。他にも、停車時平均減速度や発進時平均加速度や最大加速度や最大減速度が基準値と比較して乖離度が所定量(任意に設定可能)以上であって極端に小さいことを指標にして、ドライバの運転特性が出にくい状況におけるデータを除いて運転特性の特定を行う構成としてもよい。なお、ここで言うところの基準値とは、運転特性の特定に適しているか否かを判別するための自車両の速度や加減速度の情報の基準となる値であって、各パターンのドライバの運転傾向に従った走行が行われた場合の自車両の速度や加減速度の情報を考慮して定められるものである。例えば、基準値は、各パターンのドライバの運転傾向に従った走行が行われた場合の自車両の速度や加減速度の情報の平均値等を用いる構成としてもよい。
【0129】
さらに、Gの二山タイプやKのギザギザタイプのGO−STOP区間におけるGO−STOPデータについては、最高到達速度が規定値(任意に設定可能なものとする)に達していない場合に、最高到達速度を運転特性の特定に用いないで、ドライバの運転特性が出にくい状況における最高到達速度を除いて運転特性の特定を行う構成としてもよい。
【0130】
また、GO−STOP区間における加速中(例えば最高到達速度に到達する1分以内)に、アクセル開度が0となる頻度が例えば3回以上となった場合に、当該GO−STOP区間におけるGO−STOPデータ全てを運転特性の特定に用いないようにしたり、発進時平均加速度を運転特性の特定に用いないようにしたりする構成としてもよい。
【0131】
さらに、GO−STOP区間の道路状態をもとに、当該GO−STOP区間におけるGO−STOPデータが運転特性の特定に適しているか否かを制御部46が判定し、ドライバの運転特性が出にくい状況におけるGO−STOPデータを除いて運転特性の特定を行う構成としてもよい。この場合には、地図データ入力器36から入力される地図データをもとに、対象とするGO−STOP区間に対応する道路の勾配の情報や道路種別の情報といった道路状態に関する情報を制御部46が取得する構成とすればよい。よって、制御部46が請求項の道路情報取得手段および第3適否判定手段に相当する。
【0132】
そして、道路の勾配が所定値(任意に設定可能とする)以上に該当したり、対面通行の道路等の細街路に該当したりした場合に、外乱要素が大きいものとして、当該GO−STOP区間におけるGO−STOPデータ全てを除いて運転特性の特定を行う構成とすればよい。
【0133】
なお、前述した学習を多くのGO−STOPデータについて行うほど運転特性の特定の精度は上がるが、運転特性の特定に適していないデータを除いたGO−STOPデータについては、運転特性の特定に適していないデータが含まれていないGO−STOPデータに比べ、利用することのできるデータが少ない分だけ、運転特性の特定の精度が劣る可能性がある。これに対して、以上の構成によれば、運転特性の特定に適していないデータを除いたGO−STOPデータについては、学習時の重みを下げて学習を行うので、運転特性の特定の精度の低下を抑えながら、運転特性の特定の精度を向上させることが可能になる。
【0134】
また、以上の構成によれば、ナビゲーション装置3の制御部46で精度良く特定したドライバの運転特性に応じたコスト定数を地図データの各リンクデータおよびノードデータに付与して、目的地に至る経路のうち、各リンクデータおよびノードデータに付与されたコスト定数の合計が最小となる経路を探索するので、ドライバの運転特性に応じた経路を正確に探索することが可能となる。
【0135】
なお、本実施形態では、ナビゲーション装置3の制御部46で運転特性特定処理を行う構成を示したがが、必ずしもこれに限らない。例えば、運転特性特定処理を経路案内サーバ装置2の制御部24で行わせるなど、ナビゲーション装置3が搭載される車両外のサーバ装置で行わせる構成としてもよい。
【0136】
また、経路案内サーバ装置2の制御部24で運転特性特定処理を行う構成とする場合には、走行状況情報や自車両の現在位置の情報やドライバを特定する識別情報(例えばユーザIDとする)をナビゲーション装置3から経路案内サーバ装置2に送信し、これらの情報をもとに制御部24で運転特性特定処理を行う構成とすればよい。なお、制御部24での運転特性特定処理で運転特性が得られた場合には、ユーザIDと紐付けてこの運転特性の情報を情報記憶部23等のメモリに記憶する。そして、ナビゲーション装置3から経路探索の要求があった場合に、対象とするドライバのユーザIDをもとに、対象とするドライバの運転特性の情報を読み出し、読み出した運転特性の情報を用いてコスト決定処理を行う構成とすればよい。
【0137】
さらに、本実施形態では、経路案内サーバ装置2でコスト決定処理および経路探索実行処理を行う構成を示したが、必ずしもこれに限らない。例えば、コスト決定処理および経路探索実行処理についてもナビゲーション装置3で行う構成としてもよい。この場合には、経路案内サーバ装置2の制御部24でのコスト決定処理および経路探索実行処理と同様にして、ナビゲーション装置3の制御部46でコスト決定処理および経路探索実行処理を行う構成とすればよい。
【0138】
また、この場合には、渋滞箇所や渋滞度の情報については、VICSセンタ1と通信を行う通信装置を備えることによってVICSセンタ1から取得するものとし、地図データについては地図データ入力器36を介して記憶媒体37から取得するものとする。よって、この場合には、記憶媒体37が請求項の地図データ記憶手段に相当し、ナビゲーション装置3が経路探索装置に相当する。
【0139】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0140】
1 VICSセンタ、2 経路案内サーバ装置、3 ナビゲーション装置(経路探索装置)、21 通信装置、22 地図DB(地図データ記憶手段)、23 情報記憶部、24 制御部(経路探索手段、渋滞情報取得手段)、31 位置検出器、36 地図データ入力器、37 記憶媒体(地図データ記憶手段)、38 外部メモリ、39 表示装置、40 音声出力装置、41 操作スイッチ群、42 リモコン、43 リモコンセンサ、44 外部入力部、45 通信装置、46 制御部(運転特性特定装置、運転情報取得手段、第1適否判定手段、第2適否判定手段、第3適否判定手段、運転特性特定手段、道路情報取得手段、経路探索手段)、100 経路案内システム(経路探索装置)
【特許請求の範囲】
【請求項1】
車両の運転状態に関する情報である運転情報を取得する運転情報取得手段と、
前記運転情報取得手段で取得した運転情報をもとに、前記車両のドライバの運転特性を特定する運転特性特定手段と、を備える運転特性特定装置において、
前記運転情報取得手段は、前記運転情報として前記車両の速度、加速度、および減速度のうちの少なくともいずれかに関連する情報である速さ関連情報を取得し、
前記運転特性特定手段は、前記車両が発進してから停止するまでの区間である走行区間単位での前記速さ関連情報をもとに、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項2】
請求項1において、
前記運転特性特定手段は、前記走行区間単位での前記速さ関連情報をもとに、前記ドライバの運転傾向を複数種類のパターンに分けることによって、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項3】
請求項2において、
前記パターンは、前記車両の速度および加減速度がより大きくなる傾向にある走り屋パターン、速度および加減速度がより小さくなる傾向にあるエコドライバパターン、前記走り屋パターンと前記エコドライバパターンの中間の傾向にある普通パターンの3種類であって、
前記運転特性特定手段は、前記ドライバの運転特性をこの3種類のパターンのうちのいずれかに特定することを特徴とする運転特性特定装置。
【請求項4】
請求項1〜3のいずれか1項において、
前記速さ関連情報は、少なくとも前記車両の加速度に関連する情報であって、
前記運転特性特定手段は、少なくとも前記走行区間単位での前記車両の加速度に関連する情報をもとに、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項5】
請求項1〜4のいずれか1項において、
前記速さ関連情報は、前記車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度であって、
前記運転特性特定手段は、前記走行区間単位での前記車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度をもとに、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項6】
請求項1〜5のいずれか1項において、
前記運転情報取得手段で取得する前記速さ関連情報は複数種類であって、
前記走行区間における前記運転情報取得手段で取得した運転情報をもとに、当該走行区間における複数種類の前記速さ関連情報のそれぞれについて、前記運転特性特定手段での運転特性の特定に適しているか否かを判定する第1適否判定手段を備え、
前記運転特性特定手段は、同一の当該走行区間における複数種類の前記速さ関連情報のうち、前記第1適否判定手段で運転特性の特定に適していないと判定した種類の速さ関連情報については、前記運転特性特定手段での運転特性の特定に用いないことを特徴とする運転特性特定装置。
【請求項7】
請求項6において、
前記運転特性特定手段は、
複数の前記走行区間における前記速さ関連情報をもとに、前記ドライバの運転傾向の学習を行って、前記ドライバの運転傾向を複数種類のパターンに分けることによって、前記ドライバの運転特性を特定するものであって、
前記第1適否判定手段で運転特性の特定に適していないと判定した種類の前記速さ関連情報を除いた残りの前記走行区間における前記速さ関連情報については、前記学習時の重みを下げて前記学習を行うことを特徴とする運転特性特定装置。
【請求項8】
請求項6または7において、
前記道路情報取得手段は、前記運転情報として少なくとも前記複数種類の速さ関連情報および前記車両の速度変化に影響する運転操作に関する情報である操作情報を取得するものであって、
前記第1適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記操作情報をもとに、ドライバの運転特性が出にくい状況で行われる運転操作が行われたと判別した場合に、当該走行区間におけるその運転操作に対応する速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項9】
請求項6〜8のいずれか1項において、
前記道路情報取得手段は、前記運転情報として少なくとも前記複数種類の速さ関連情報を取得するものであって、
前記第1適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記複数種類の速さ関連情報を、ドライバの運転特性が出にくい状況における前記速さ関連情報を判別する指標となる値である第1規定値と比較し、前記複数種類の速さ関連情報のうち前記第1規定値を満たさない速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項10】
請求項6〜9のいずれか1項において、
前記道路情報取得手段は、前記運転情報として少なくとも前記複数種類の速さ関連情報を取得するものであって、
前記第1適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記複数種類の速さ関連情報を、前記運転特性の特定に適しているか否かを判別するため前記速さ関連情報の基準となる値である基準値と比較し、前記複数種類の速さ関連情報のうち前記基準値からの乖離度が所定量以上の速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項11】
請求項1〜10のいずれか1項において、
前記走行区間における前記運転情報取得手段で取得した運転情報をもとに、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適しているか否かを判定する第2適否判定手段を備え、
前記運転特性特定手段は、前記第2適否判定手段で運転特性の特定に適していないと判定した走行区間における前記速さ関連情報の全てについて、前記運転特性特定手段での運転特性の特定に用いないことを特徴とする運転特性特定装置。
【請求項12】
請求項11において、
前記第2適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記速さ関連情報を、ドライバの運転特性が出にくい状況における前記速さ関連情報を判別する指標となる値である第2規定値と比較し、前記速さ関連情報が前記第2規定値を満たさなかった場合に、当該走行区間における前記速さ関連情報の全てについて、前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項13】
請求項1〜12のいずれか1項において、
道路状態に関する情報である道路情報を取得する道路情報取得手段と、
前記走行区間における前記道路情報取得手段で取得した道路情報をもとに、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適しているか否かを判定する第3適否判定手段を備え、
前記運転特性特定手段は、前記第3適否判定手段で運転特性の特定に適していないと判定した走行区間における前記速さ関連情報については、前記運転特性特定手段での運転特性の特定に用いないことを特徴とする運転特性特定装置。
【請求項14】
請求項13において、
前記道路情報取得手段は、前記道路情報として少なくとも道路の勾配の情報を取得するものであって、
前記第3適否判定手段は、前記走行区間における前記道路情報取得手段で取得した道路の勾配の情報をもとに、前記車両の走行中の道路の勾配が所定値以上であった場合に、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項15】
請求項13または14において、
前記道路情報取得手段は、前記道路情報として少なくとも道路種別の情報を取得するものであって、
前記第3適否判定手段は、前記走行区間における前記道路情報取得手段で取得した道路種別の情報をもとに、前記車両の走行中の道路が細街路であった場合に、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項16】
道路を複数のリンクおよびノードにより示した地図データを記憶する地図データ記憶手段と、
前記地図データ記憶手段により記憶された前記地図データの各リンクおよびノードにコストを付与して、目的地に至る経路のうち、前記各リンクおよびノードに付与されたコストの合計が最小となる推奨経路を探索する経路探索手段と、を備える経路探索装置であって、
請求項1〜15のいずれか1項に記載の運転特性特定装置を備え、
前記経路探索手段は、前記地図データの各リンクおよびノードに前記運転特性特定装置で特定した前記ドライバの運転特性に応じたコストを付与して、前記推奨経路を探索することを特徴とする経路探索装置。
【請求項17】
請求項16において、
前記ドライバの運転傾向のパターンは、前記走り屋パターン、前記エコドライバパターン、前記普通パターンの3種類であるとともに、
前記運転特性特定装置の前記運転特性特定手段は、前記ドライバの運転特性をこの3種類のパターンのいずれかに特定するものであって、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、前記車両の停止回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項18】
請求項17において、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、信号交差点の数が多いリンクのコスト、一旦停止が存在するノードのコスト、一旦停止を含むリンクのコスト、および右左折する交差点のノードのコストのうちの少なくともいずれかを上げることによって、前記車両の停止回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項19】
請求項16〜18のいずれか1項において、
前記ドライバの運転傾向のパターンは、前記走り屋パターン、前記エコドライバパターン、前記普通パターンの3種類であるとともに、
前記運転特性特定装置の前記運転特性特定手段は、前記ドライバの運転特性をこの3種類のパターンのいずれかに特定するものであって、
渋滞箇所の情報を取得する渋滞情報取得手段を備え、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、前記渋滞情報取得手段で取得した渋滞箇所の情報をもとに、前記車両が渋滞箇所を通過する回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項20】
請求項19において、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、渋滞箇所を含むリンクのコストを上げることによって、前記車両が渋滞箇所を通過する回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項1】
車両の運転状態に関する情報である運転情報を取得する運転情報取得手段と、
前記運転情報取得手段で取得した運転情報をもとに、前記車両のドライバの運転特性を特定する運転特性特定手段と、を備える運転特性特定装置において、
前記運転情報取得手段は、前記運転情報として前記車両の速度、加速度、および減速度のうちの少なくともいずれかに関連する情報である速さ関連情報を取得し、
前記運転特性特定手段は、前記車両が発進してから停止するまでの区間である走行区間単位での前記速さ関連情報をもとに、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項2】
請求項1において、
前記運転特性特定手段は、前記走行区間単位での前記速さ関連情報をもとに、前記ドライバの運転傾向を複数種類のパターンに分けることによって、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項3】
請求項2において、
前記パターンは、前記車両の速度および加減速度がより大きくなる傾向にある走り屋パターン、速度および加減速度がより小さくなる傾向にあるエコドライバパターン、前記走り屋パターンと前記エコドライバパターンの中間の傾向にある普通パターンの3種類であって、
前記運転特性特定手段は、前記ドライバの運転特性をこの3種類のパターンのうちのいずれかに特定することを特徴とする運転特性特定装置。
【請求項4】
請求項1〜3のいずれか1項において、
前記速さ関連情報は、少なくとも前記車両の加速度に関連する情報であって、
前記運転特性特定手段は、少なくとも前記走行区間単位での前記車両の加速度に関連する情報をもとに、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項5】
請求項1〜4のいずれか1項において、
前記速さ関連情報は、前記車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度であって、
前記運転特性特定手段は、前記走行区間単位での前記車両の発進時からの所定期間の平均加速度、停止時までの所定期間の平均減速度、最大加速度、最大減速度、および最高到達速度をもとに、前記ドライバの運転特性を特定することを特徴とする運転特性特定装置。
【請求項6】
請求項1〜5のいずれか1項において、
前記運転情報取得手段で取得する前記速さ関連情報は複数種類であって、
前記走行区間における前記運転情報取得手段で取得した運転情報をもとに、当該走行区間における複数種類の前記速さ関連情報のそれぞれについて、前記運転特性特定手段での運転特性の特定に適しているか否かを判定する第1適否判定手段を備え、
前記運転特性特定手段は、同一の当該走行区間における複数種類の前記速さ関連情報のうち、前記第1適否判定手段で運転特性の特定に適していないと判定した種類の速さ関連情報については、前記運転特性特定手段での運転特性の特定に用いないことを特徴とする運転特性特定装置。
【請求項7】
請求項6において、
前記運転特性特定手段は、
複数の前記走行区間における前記速さ関連情報をもとに、前記ドライバの運転傾向の学習を行って、前記ドライバの運転傾向を複数種類のパターンに分けることによって、前記ドライバの運転特性を特定するものであって、
前記第1適否判定手段で運転特性の特定に適していないと判定した種類の前記速さ関連情報を除いた残りの前記走行区間における前記速さ関連情報については、前記学習時の重みを下げて前記学習を行うことを特徴とする運転特性特定装置。
【請求項8】
請求項6または7において、
前記道路情報取得手段は、前記運転情報として少なくとも前記複数種類の速さ関連情報および前記車両の速度変化に影響する運転操作に関する情報である操作情報を取得するものであって、
前記第1適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記操作情報をもとに、ドライバの運転特性が出にくい状況で行われる運転操作が行われたと判別した場合に、当該走行区間におけるその運転操作に対応する速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項9】
請求項6〜8のいずれか1項において、
前記道路情報取得手段は、前記運転情報として少なくとも前記複数種類の速さ関連情報を取得するものであって、
前記第1適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記複数種類の速さ関連情報を、ドライバの運転特性が出にくい状況における前記速さ関連情報を判別する指標となる値である第1規定値と比較し、前記複数種類の速さ関連情報のうち前記第1規定値を満たさない速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項10】
請求項6〜9のいずれか1項において、
前記道路情報取得手段は、前記運転情報として少なくとも前記複数種類の速さ関連情報を取得するものであって、
前記第1適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記複数種類の速さ関連情報を、前記運転特性の特定に適しているか否かを判別するため前記速さ関連情報の基準となる値である基準値と比較し、前記複数種類の速さ関連情報のうち前記基準値からの乖離度が所定量以上の速さ関連情報が存在した場合に、当該走行区間におけるその速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項11】
請求項1〜10のいずれか1項において、
前記走行区間における前記運転情報取得手段で取得した運転情報をもとに、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適しているか否かを判定する第2適否判定手段を備え、
前記運転特性特定手段は、前記第2適否判定手段で運転特性の特定に適していないと判定した走行区間における前記速さ関連情報の全てについて、前記運転特性特定手段での運転特性の特定に用いないことを特徴とする運転特性特定装置。
【請求項12】
請求項11において、
前記第2適否判定手段は、前記走行区間における前記運転情報取得手段で取得した前記速さ関連情報を、ドライバの運転特性が出にくい状況における前記速さ関連情報を判別する指標となる値である第2規定値と比較し、前記速さ関連情報が前記第2規定値を満たさなかった場合に、当該走行区間における前記速さ関連情報の全てについて、前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項13】
請求項1〜12のいずれか1項において、
道路状態に関する情報である道路情報を取得する道路情報取得手段と、
前記走行区間における前記道路情報取得手段で取得した道路情報をもとに、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適しているか否かを判定する第3適否判定手段を備え、
前記運転特性特定手段は、前記第3適否判定手段で運転特性の特定に適していないと判定した走行区間における前記速さ関連情報については、前記運転特性特定手段での運転特性の特定に用いないことを特徴とする運転特性特定装置。
【請求項14】
請求項13において、
前記道路情報取得手段は、前記道路情報として少なくとも道路の勾配の情報を取得するものであって、
前記第3適否判定手段は、前記走行区間における前記道路情報取得手段で取得した道路の勾配の情報をもとに、前記車両の走行中の道路の勾配が所定値以上であった場合に、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項15】
請求項13または14において、
前記道路情報取得手段は、前記道路情報として少なくとも道路種別の情報を取得するものであって、
前記第3適否判定手段は、前記走行区間における前記道路情報取得手段で取得した道路種別の情報をもとに、前記車両の走行中の道路が細街路であった場合に、当該走行区間における前記速さ関連情報が前記運転特性特定手段での運転特性の特定に適していないと判定することを特徴とする運転特性特定装置。
【請求項16】
道路を複数のリンクおよびノードにより示した地図データを記憶する地図データ記憶手段と、
前記地図データ記憶手段により記憶された前記地図データの各リンクおよびノードにコストを付与して、目的地に至る経路のうち、前記各リンクおよびノードに付与されたコストの合計が最小となる推奨経路を探索する経路探索手段と、を備える経路探索装置であって、
請求項1〜15のいずれか1項に記載の運転特性特定装置を備え、
前記経路探索手段は、前記地図データの各リンクおよびノードに前記運転特性特定装置で特定した前記ドライバの運転特性に応じたコストを付与して、前記推奨経路を探索することを特徴とする経路探索装置。
【請求項17】
請求項16において、
前記ドライバの運転傾向のパターンは、前記走り屋パターン、前記エコドライバパターン、前記普通パターンの3種類であるとともに、
前記運転特性特定装置の前記運転特性特定手段は、前記ドライバの運転特性をこの3種類のパターンのいずれかに特定するものであって、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、前記車両の停止回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項18】
請求項17において、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、信号交差点の数が多いリンクのコスト、一旦停止が存在するノードのコスト、一旦停止を含むリンクのコスト、および右左折する交差点のノードのコストのうちの少なくともいずれかを上げることによって、前記車両の停止回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項19】
請求項16〜18のいずれか1項において、
前記ドライバの運転傾向のパターンは、前記走り屋パターン、前記エコドライバパターン、前記普通パターンの3種類であるとともに、
前記運転特性特定装置の前記運転特性特定手段は、前記ドライバの運転特性をこの3種類のパターンのいずれかに特定するものであって、
渋滞箇所の情報を取得する渋滞情報取得手段を備え、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、前記渋滞情報取得手段で取得した渋滞箇所の情報をもとに、前記車両が渋滞箇所を通過する回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【請求項20】
請求項19において、
前記経路探索手段は、前記運転特性特定手段で特定した前記ドライバの運転特性が前記走り屋パターンであった場合には、渋滞箇所を含むリンクのコストを上げることによって、前記車両が渋滞箇所を通過する回数がより少なくなる前記推奨経路を探索することを特徴とする経路探索装置。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−33107(P2012−33107A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−173904(P2010−173904)
【出願日】平成22年8月2日(2010.8.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年8月2日(2010.8.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]