
運転状態評価装置および運転状態評価システム
【課題】判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことを可能にする。
【解決手段】位置検出器11で検出した自車両の現在位置と記憶媒体17に記憶されている地図データとをもとに、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置情報依存トリガ生成部61cと、ETCゲートを自車両が通過したことを検出した場合に、自車両の走行中の道路が高速道路であると判定するETC情報依存トリガ生成部61aと、位置情報依存トリガ生成部61cでの判定結果とETC情報依存トリガ生成部61aでの判定結果とをもとに、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定部62と、を備える。
【解決手段】位置検出器11で検出した自車両の現在位置と記憶媒体17に記憶されている地図データとをもとに、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置情報依存トリガ生成部61cと、ETCゲートを自車両が通過したことを検出した場合に、自車両の走行中の道路が高速道路であると判定するETC情報依存トリガ生成部61aと、位置情報依存トリガ生成部61cでの判定結果とETC情報依存トリガ生成部61aでの判定結果とをもとに、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定部62と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転状態評価装置および運転状態評価システムに関するものである。
【背景技術】
【0002】
近年、GPS(Global Positioning System)を利用して検出した車両の現在位置情報および車両の各種センサ等から得られる車両の挙動情報や操作情報(以下、車両情報)などを収集し、携帯電話通信網を利用して事務所に送信することにより、管理者が車両の運行情報をリアルタイムに把握できるようにする運行管理システムが導入されている。また、収集した車両情報を利用して車両の運行中に省燃費運転や安全運転の診断といった運転の良否に関する診断(以下、運転診断)を行い、この運転診断に基づいた警報や運転アドバイスをドライバに行うことにより運転技術を向上させる運転教示機能を搭載した車載器も実用化されている。
【0003】
ここで、運転教示機能は大きく、省燃費運転診断と安全運転診断の2つに大別される。まず、省燃費運転診断には、エンジン回転数診断、アイドリング診断、波状運転診断などがあり、例えばエンジン回転数診断では、設定した回転数を超過した状態を所定時間継続した場合などに警報が発せられたり、低い評価がなされたりする。また、安全運転診断においては、速度診断、加速減速診断、旋回診断等が該当し、例えば速度診断では、設定した速度を超えて所定時間継続して走行した場合に警報が発せられたり、低い評価がなされたりする。
【0004】
このように、各種の運転診断を行う場合には、運転診断に用いるための閾値を設定することが必要になるが、例えば速度診断やエンジン回転数診断などのように、同一の運転診断においても走行中の道路種別が一般道路であるか高速道路であるかで最適な閾値が異なってくる運転診断では、閾値を走行環境に応じて設定しないと正確な運転診断が行えない。
【0005】
これに対して、走行中の道路種別が一般道路であるか高速道路であるかを判定する技術が従来から知られている。
【0006】
例えば、特許文献1には、高速道路の料金所のETC(登録商標)ゲートに設置されたETCの路側アンテナと車載器との間で送受信される入口情報と出口情報をもとに、高速道路と一般道路との判定を行う技術が開示されている。
【0007】
しかしながら、特許文献1に開示の技術では、対距離料金精算タイプの高速道路の入口・出口を通過する場合には、高速道路と一般道路との判定を確実に行うことができるが、対距離料金精算タイプの道路と都市高速などの均一料金精算タイプの道路とが合わさったルートを走行する場合に、高速道路と一般道路との判定を正しく行うことができなくなるおそれがある。
【0008】
例えば、対距離料金精算タイプの道路から均一料金精算タイプの道路へ乗り換える場合、特許文献1に開示の技術では、対距離料金精算タイプの道路での精算を行うためのETCゲートを通過した時点で出口を通過したと判定し、一般道路に進入したと判定することになるが、実際にはまだ高速道路を走行している。また、入口および出口の一方にしかETCゲートが設置されていない都市高速などの道路を走行する場合にも同様の問題が生じる。
【0009】
そこで、この問題を解決する手段として、例えば、特許文献2には、高速道路の入口料金所や出口料金所のゲートに設置された質問器と車両に搭載された応答器との間で送受信される入口情報と出口情報に加え、GPSを利用して検出した車両の現在位置をもとに地図データベースから取得した道路種別情報を用いることによって、高速道路と一般道路との判定を行う技術が開示されている。詳しくは、特許文献2に開示の技術では、出口情報を受信した場合には、一般道路に進入したと判定する一方、出口情報を受信しなかった場合には、車両の現在位置をもとに地図データベースから取得した道路種別情報をもとに、高速道路と一般道路との判定を行う。
【0010】
また、特許文献3には、高速道路入口で渡される通行カードからカードリーダがデータを読み取ることで、車両が高速道路に進入したと判定するともに、GPSを利用して検出した車両の現在位置が地図データを記憶したCD−ROMに記憶されている高速道路の出口位置を通過した場合に車両が一般道路に進入したと判定する技術が開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2008−90348号公報
【特許文献2】特開2001−291125号公報
【特許文献3】特開平11−2541号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献2に開示の技術は、高速道路の下を一般道路が並行して走っており、車両が一般道路を走行中か高速道路を走行中であるか判定することができない状況では、高速道路を一般道路と誤判定してしまう問題点が生じる。また、特許文献2に開示の技術は、対距離料金精算タイプの高速道路から都市高速などの均一料金精算タイプの道路へ乗り換える地点に料金所のゲートが設置されており、このゲートで出口情報を受信した場合に、高速道路を走行中にも一般道路を走行中と誤判定してしまう問題点が生じる。
【0013】
また、特許文献3に開示の技術でも、高速道路の下を一般道路が並行して走っており、車両が一般道路を走行中か高速道路を走行中であるか判定することができない状況では、高速道路を一般道路と誤判定してしまう問題点が生じる。
【0014】
つまり、従来の技術では、高速道路を走行中であっても一般道路を走行中であると誤判定してしまう問題点が生じる。この問題点は、走行中の道路種別が一般道路であるか高速道路であるかを判定し、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合に、特に不具合を生じさせる。
【0015】
詳しくは、速度診断やエンジン回転数診断などのように、高速道路についての閾値が一般道路についての閾値よりも高く設定される運転診断においては、高速道路を走行中にも関わらず一般道路を走行中であると誤判定された場合、適切な閾値よりも低い閾値によって診断が行われる。そして、このような誤った閾値によって誤診断が行われることにより、良好な運転をしているにも関わらず警報を受けたり、低い評価を受けたりするなど、ドライバに対しての評価が下がってしまうという問題点が生じる。また、このような評価を下げる誤診断の発生は、ドライバのモチベーションを下げることになるので、運転診断を行う装置の商品価値を低下させることにもなる。
【0016】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことを可能にする運転状態評価装置および運転状態評価システムを提供することにある。
【課題を解決するための手段】
【0017】
請求項1の運転状態評価装置によれば、高速道路の料金所ゲートを車両が通過したことを検出した場合に、車両の走行中の道路が高速道路であるとのみゲート依存判定手段が判定することになる。よって、ゲート依存判定手段では、対距離料金精算タイプの高速道路から均一料金精算タイプの高速道路へ料金所ゲートを通過して乗り換えた場合に、高速道路を一般道路と誤判定することがない。
【0018】
また、以上の構成によれば、ゲート依存判定手段での判定結果だけでなく、車両の現在位置と地図データとをもとにした位置依存判定手段での判定結果をもとに、道路種別決定手段が車両の走行中の道路が高速道路であるか一般道路であるかを決定することになる。従って、高速道路から一般道路へ料金所ゲートを通過して乗り換えた場合に、高速道路を走行中とゲート依存判定手段で判定が行われるが、位置依存判定手段での判定結果をもとに、車両の走行中の道路が高速道路であるか一般道路であるかを正しく決定することが可能になる。
【0019】
さらに、位置依存判定手段での判定は逐次行われるため、もし、ゲート依存判定手段の判定結果をもとに、一般道路を高速道路と決定する誤判定が行われた場合であっても、位置依存判定手段での判定結果をもとに、速やかに正しく決定し直すことが可能になる。
【0020】
また、以上の構成によれば、高速道路の下を一般道路が並行して走っている状況下で、車両が高速道路を走行中であるにもかかわらず、位置依存判定手段が誤って車両の走行道路が一般道路であると判定してしまった場合であっても、ゲート依存判定手段の判定結果をもとに、速やかに正しく決定し直すことが可能になる。
【0021】
従って、以上の構成によれば、特に高速道路を走行中において走行中の道路を一般道路と誤判定することがなくなる。
【0022】
また、以上の構成では、運転の良否に関する診断である運転診断でより良好な評価がなされる範囲の上限値として閾値が定められており、高速道路についてのその閾値が一般道路についてのその閾値よりも大きい値に設定されているので、高速道路を走行中において走行中の道路を一般道路と仮に誤判定したとすると、高速道路において適切な閾値よりも良好な評価がなされる範囲が狭い閾値が設定されることになる。そして、高速道路において適切な閾値よりも良好な評価がなされる範囲が狭い閾値が設定された場合には、運転診断において、良好な運転をしているにも関わらず、より低い評価がなされてしまう問題が生じる。
【0023】
しかしながら、以上の構成によれば、前述したように、高速道路を走行中において走行中の道路を一般道路と誤判定することがないので、上述のようなドライバに対しての評価を下げる誤診断を防ぐことができる。
【0024】
その結果、以上の構成によれば、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことが可能になる。
【0025】
また、請求項12の運転状態評価システムでも、高速道路の料金所ゲートを車両が通過したことを検出した場合に、車両の走行中の道路が高速道路であるとのみ判定するゲート依存判定手段と、車両の現在位置と地図データとをもとに車両の走行中の道路が高速道路であるか一般道路であるかを判定する位置依存判定手段との判定結果をもとに、道路種別決定手段が車両の走行中の道路が高速道路であるか一般道路であるかを決定することになる。よって、以上の構成によっても、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるのかをより精度よく決定できる上に、高速道路を走行中において走行中の道路を一般道路と誤判定することがなくなる。
【0026】
従って、運転診断でより良好な評価がなされる範囲の上限値として定められているとともに高速道路についての値が一般道路についての値よりも大きい値に設定されている閾値を用いた管理センタでの運転診断において、ドライバに対しての評価を下げる誤診断を防ぐことができる。
【0027】
その結果、以上の構成によっても、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことが可能になる。
【0028】
また、請求項2によれば、自信度判断手段で判断した現在位置自信度が所定値未満である場合には、位置依存判定手段での判定結果を用いずに、道路種別決定手段での決定を行なうことになる。よって、以上の構成によれば、位置依存判定手段での判定の精度が十分でない場合に、位置依存判定手段の判定結果を用いずに上記決定を行うことで、間違った決定を行いにくくすることが可能になる。
【0029】
さらに、以上の構成によれば、自信度判断手段で現在位置自信度を定期的に判断するので、位置依存判定手段での判定の精度が十分と言えるほどに現在位置自信度が上がったところで速やかに位置依存判定手段の判定結果を用いて上記決定を行い、より正確な決定を行うことが可能になる。
【0030】
また、請求項3によれば、操作入力依存判定手段での判定結果は、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力結果をもとに判定した判定結果であるので、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを正確に判定した判定結果である可能性が高い。つまり、操作入力依存判定手段での判定結果は、より正確な判定結果と考えられる。以上の構成によれば、このより正確な判定結果を用いて、道路種別決定手段での決定を行うことが可能になるので、より正確に上記決定を行うことが可能になる。
【0031】
なお、操作入力依存判定手段での判定結果は、ユーザからの入力結果をもとに判定した判定結果であるので、位置依存判定手段での判定結果よりも正確な判定結果である可能性が高い。
【0032】
これに対して、請求項4によれば、操作入力依存判定手段での判定結果が得られた場合には、当該判定結果と異なる位置依存判定手段での判定結果を道路種別決定手段で用いることができないようにする無効化を行うので、操作入力依存判定手段での判定結果よりも正確でない可能性が高い位置依存判定手段での判定結果をもとに、道路種別決定手段で誤った決定が行なわれることを防ぐことが可能になる。
【0033】
また、無効化手段により位置依存判定手段の無効化が継続されているときに操作入力依存判定手段での判定結果と同じ判定結果が位置依存判定手段で得られた場合に、無効化手段による無効化を解除するので、位置依存判定手段での判定の精度が十分に回復したり上がったりしたところで、位置依存判定手段での判定結果も道路種別決定手段で用いられるようにすることが可能になる。従って、より正確である可能性の高い位置依存判定手段での判定結果が得られるようになってから無効化を解除することにより、道路種別決定手段でより正確に上記決定が行われることを担保することが可能になる。
【0034】
また、請求項5によれば、無効化手段による無効化が継続している場合であっても、自信度判断手段で判断した現在位置自信度が、位置依存判定手段での判定の精度が十分と言えるほど高い場合に、現在走行中の道路の道路種別の確認をユーザに促す報知を行うことが可能になる。よって、例えばユーザの勘違いによる操作入力手段への入力や操作入力手段への入力忘れを原因とする操作入力依存判定手段での誤判定が生じたまま、無効化手段による無効化が継続してしまっている可能性がある場合に、現在走行中の道路の道路種別の確認をユーザに促す報知を行って、勘違いによる操作入力手段への入力や操作入力手段への入力忘れをユーザに気付かせることが可能になる。そしてその結果、操作入力依存判定手段での判定結果が正確になるような操作入力部への入力をユーザに行わせることが可能になる。
【0035】
また、請求項6によれば、無効化手段による無効化が継続されている状態にある場合を除き、時間的に後に得られた判定結果に従って、道路種別決定手段での決定を行なうので、無効化が継続されている状態にある場合を除き、最新の判定結果に従って、より正確に上記決定を行うことが可能になる。
【0036】
また、請求項7によれば、時間的に後に得られた判定結果に従って、道路種別決定手段での決定を行なうので、最新の判定結果に従って、より正確に上記決定を行うことが可能になる。
【0037】
また、請求項8によれば、位置依存判定手段での判定のタイミングおよびゲート依存判定手段での判定のタイミングのうちの少なくともいずれかと操作入力依存判定手段での判定のタイミングとが重なった場合に、操作入力依存判定手段での判定結果を優先して道路種別決定手段での決定を行なうことになる。
【0038】
操作入力依存判定手段での判定結果は、ユーザからの入力結果をもとに判定した判定結果であるので、位置依存判定手段での判定結果やゲート依存判定手段での判定結果よりも正確な判定結果である可能性が高い。つまり、操作入力依存判定手段での判定結果は、より正確な判定結果と考えられる。以上の構成によれば、より正確な判定結果を用いて、上記決定を行うことが可能になるので、より正確に上記決定を行うことが可能になる。
【0039】
また、請求項9のように、道路種別決定手段が、位置依存判定手段での判定のタイミングとゲート依存判定手段での判定のタイミングとが重なった場合には、ゲート依存判定手段での判定結果を優先して、車両の走行中の道路が高速道路であるか一般道路であるかを決定する態様としてもよい。
【0040】
また、請求項10のように、高速道路の料金所ゲートが、ゲート通過に関連する情報であるゲート通過情報を送信するETCゲートであり、ETCゲートから送信されたゲート通過情報を取得するゲート通過情報取得手段を運転状態評価装置が備え、ゲート依存判定手段が、ゲート通過情報取得手段でゲート通過情報を取得した場合に、当該ETCゲートを車両が通過したと検出する態様としてもよい。
【0041】
また、請求項11のように、閾値として高速道路および一般道路のそれぞれについて段階的に複数の値が設定されており、運転診断において、この複数の値を用いることによって段階的な評価が行われる態様としてもよい。
【図面の簡単な説明】
【0042】
【図1】運行管理装置1の概略的な構成を示す図である。
【図2】ECU27の概略的な構成を示す機能ブロック図である。
【図3】(a)および(b)は、高速道路および一般道路のそれぞれについての複数種類の判定閾値を説明するための図である。
【図4】道路種別判定部60の概略的な構成を示す機能ブロック図である。
【図5】ETC情報依存トリガ生成部61aでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。
【図6】ETC情報依存トリガ生成部61aの道路種別変更要求トリガによる道路種別の変更例を説明するための図である。
【図7】操作入力依存トリガ生成部61bでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。
【図8】位置情報依存トリガ生成部61cでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。
【図9】運行管理装置1における道路種別の設定のタイミングの一例を示す図である。
【図10】運行管理システム100の概略的な構成を示す図である。
【発明を実施するための形態】
【0043】
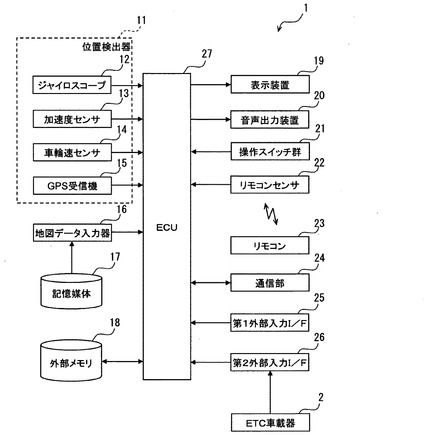
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された運行管理装置1の概略的な構成を示す図である。図1に示す運行管理装置1は、トラック、タクシー、自家用車等の車両に搭載されるものであり、位置検出器11、地図データ入力器16、記憶媒体17、外部メモリ18、表示装置19、音声出力装置20、操作スイッチ群21、リモコン22、リモコンセンサ23、通信部24、第1外部入力インターフェース(I/F)25、第2外部入力I/F26、およびこれらと接続されたECU27を備えている。なお、運行管理装置1が請求項の運転状態評価装置に相当する。また、運行管理装置1を搭載している車両を以降では自車両と呼ぶ。なお、本実施形態では、車両に搭載されるナビゲーション装置に本発明を適用した場合を例に挙げて説明を行う。
【0044】
位置検出器11は、車両の鉛直方向周りの角速度を検出するジャイロスコープ12、自車両の加速度を検出する加速度センサ13、各転動輪の回転速度から自車両の速度を検出する車輪速センサ14、および人工衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有しており、定期的に自車両の現在位置の検出を行う。よって、位置検出器11が請求項の位置検出手段に相当する。これらの各センサ12〜15は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては上述した内の一部で構成してもよく、さらに、図示しない地磁気センサやステアリングの回転センサ等を用いてもよい。
【0045】
なお、運行管理装置1では、自律航法と電波航法とを組み合わせたハイブリッド航法によって自車両の現在位置を特定する。そして、特定した現在位置と後述する道路データとを照合することによって自車両の走行中の道路を特定し、道路上に最終的な自車両の現在位置を特定する。なお、自律航法とは、ジャイロスコープ12等の方位センサの測定値と加速度センサ13や車輪速センサ14の測定値とから自車両の現在位置を推定する方法である。また、電波航法とは、複数の人工衛星からの電波に基づいてGPS受信機15で自車両の座標(緯度・経度)を測位し、現在位置を推定する方法である。なお、自車両の現在位置を特定し、特定した現在位置と道路データとを照合して自車両の現在位置を後述の地図データ中の道路リンクにマッチング(つまり、一致)させる処理を本実施形態ではマップマッチング処理と呼ぶこととする。
【0046】
地図データ入力器16は、記憶媒体17が装着され、その記憶媒体17に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンク方向、リンク方位、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、および制限速度等の各データから構成される。よって、記憶媒体17が請求項の地図データ記憶手段に相当する。
【0047】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0048】
また、記憶媒体17には、各種施設の種類、名称、住所のデータなども記憶されており、それらのデータは経路探索の際の目的地設定などに用いられる。なお、記憶媒体17としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0049】
外部メモリ18は、HDD等の書き込み可能な大容量記憶装置である。外部メモリ18には大量のデータや電源をOFFしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器16からコピーして利用したりする等の用途がある。
【0050】
表示装置19は、車両の走行を案内するための地図、目的地選択画面、後述の運転診断の結果等を表示するものであって、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。音声出力装置20は、スピーカ等から構成され、ECU27の指示に基づいて、経路案内時の案内音声、後述の問い合わせ音声などを出力する。
【0051】
操作スイッチ群21は、例えば表示装置19と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作によりECU27へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整、道路種別設定変更等)の操作指示を行う。また、操作スイッチ群21は、後述する道路種別決定部62で設定済みの道路種別を変更するためのスイッチ(以下、道路種別設定変更スイッチと呼ぶ)を含んでいる。そして、この道路種別設定変更スイッチを操作することによって、ユーザ(例えばドライバ)は、道路種別の設定の変更の要求をECU27に行うことができる。つまり、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力をこの道路種別設定変更スイッチで受け付けることになる。よって、操作スイッチ群21が請求項の操作入力手段に相当する。
【0052】
リモコン22には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ23を介して各種指令信号をECU27に入力することにより、操作スイッチ群21と同じ機能をECU27に対して実行させることが可能である。
【0053】
通信部24は、通信網を介して、自車両の運行管理を行っているセンタとの間で通信を行うものである。なお、ここで言うところのセンタには、例えば自車両の運行管理を行っている事務所のサーバ等が該当する。また、通信部24は、例えば自車両に搭載されるDCM(data communication module)等のテレマティクス通信に用いられる車載通信モジュールを通じて通信網に接続する構成としてもよいし、例えばBluetooth(登録商標)等で接続した携帯電話機を通じて通信網に接続する構成としてもよい。
【0054】
第1外部入力I/F25は、自車両の各種センサ群から車両の運転操作に関する情報(以下、操作情報)や車両の挙動に関する情報(以下、挙動情報)などの情報(以下、車両情報)を取得するためのインターフェースである。なお、操作情報としては、例えばアクセル開度センサから得られるアクセル開度の情報、スロットル開度センサから得られるスロットル開度の情報、エンジン回転数センサから得られるエンジン回転数の情報、およびブレーキストロークセンサから得られるブレーキペダルの踏み込み量の情報などがある。また、挙動情報としては、加速度センサ13から得られる車両の加減速度の情報、車輪速センサ14や車速センサから得られる車両の速度の情報などがある。
【0055】
第2外部入力I/F26は、ETC(登録商標)車載器2からECU27が情報を取得するためのインターフェースである。よって、第2外部入力I/F26およびECU27が請求項のゲート通過情報取得手段に相当する。なお、ETC車載器2は、高速自動車国道や都市高速道路や自動車専用道路といった高速道路の料金所のETCゲート(つまり、高速道路の出入口)に設けられたETC路側機との間でDSRC(Dedicated Short RangeCommunication)に準じた無線通信を行うことによって、出入口の料金所の情報や通行料金の情報等のゲート通過に関連する情報(以下、ゲート通過情報)を受信するものである。第2外部入力I/F26は、ETC車載器2がこのゲート通過情報を受信したときに、このゲート通過情報を取得するためのものである。
【0056】
ECU27は、CPU、ROM、RAM、バックアップRAM等よりなるマイクロコンピュータを主体として構成される。そして、ECU27は、位置検出器11、地図データ入力器16、外部メモリ18、操作スイッチ群21、リモコンセンサ23、第1外部入力I/F25、第2外部入力I/F26から入力された各種情報に基づき、ナビゲーション機能としての処理や運転診断に関連する処理などを実行する。
【0057】
次に、図2を用いて、ECU27の概略的な構成について説明を行う。図2は、ECU27の概略的な構成を示す機能ブロック図である。なお、ここでは便宜上、ナビゲーション機能としての処理については、マップマッチング処理を除いて説明を省略するものとする。図2に示すようにECU27は、車両位置特定部40、情報収集部50、道路種別判定部60、および運転診断部70を備えている。
【0058】
車両位置特定部40は、位置検出器11で定期的に検出される自車両の現在位置と地図データ入力器16から入力される地図データとをもとに、前述のマップマッチング処理を行い、道路上に最終的な自車両の現在位置を特定する。
【0059】
また、車両位置特定部40は、現在位置自信度(MMCL)を算出する。なお、現在位置自信度(MMCL)は、車両位置特定部40でのマップマッチング処理によって特定された自車両の走行中の道路がどれくらい確からしいかというマップマッチングの確からしさを示す指標である。この現在位置自信度(MMCL)は、車両の各種センサの異常(断線・短絡等による故障)、車両の各種センサの状態(GPS受信状況・センサ学習状況)、マップマッチングにおける形状相関や方位ずれ、マッチング候補数の数などをもとに算出される。
【0060】
例えば、位置検出器11で検出した自車両の現在位置が道路上にのっていない場合(つまり、オフリンクの場合)には、現在位置自信度(MMCL)は最も低く算出される。また、狭角分岐追加直後や上下道が判定できない場合、または並走路が近くにある場合には現在位置自信度(MMCL)が低めに算出される。逆に、上下道が判定できた場合、または位置検出器11で検出した自車両の現在位置が郊外や山岳など確からしい一本道の道路上にのっている場合は現在位置自信度(MMCL)が高めに算出される。
【0061】
情報収集部50は、第1外部入力I/F25を介して、自車両の各種センサ群から操作情報や挙動情報などの車両情報を収集する。なお、情報収集部50が請求項の車両情報収集手段に相当する。
【0062】
道路種別判定部60は、操作スイッチ群21、第2外部入力I/F26、車両位置特定部40から入力された各種情報に基づき、自車両の走行中の道路の道路種別を決定する。詳しくは、道路種別判定部60は、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する。なお、道路種別判定部60での処理の詳細については後述する。
【0063】
運転診断部70は、情報収集部50によって収集された車両情報および道路種別判定部60により決定された道路種別に基づき、道路種別に適した運転診断を実施して運転評価値を算出する。なお、ここで言うところの運転診断とは、所定の閾値を判定閾値として自車両の運転の良否を評価する診断である。また、ここで言うところの運転診断としては、速度診断やエンジン回転数診断など、車両情報が示す検出値等が判定閾値におさまる場合により良好な評価がなされる診断が挙げられる。
【0064】
また、判定閾値は、高速道路を走行中用の値(以下、高速用閾値)と一般道路を走行中用の値(以下、一般用閾値)とが予め用意されており、道路種別判定部60により決定された道路種別に従って、高速用閾値と一般用閾値とのうちのいずれかを運転診断に用いる判定閾値として設定する。具体的には、道路種別判定部60により決定された道路種別が高速道路であった場合には、高速用閾値を運転診断に用いる判定閾値として設定する。また、道路種別判定部60により決定された道路種別が一般道路であった場合には、一般用閾値を運転診断に用いる判定閾値として設定する。
【0065】
さらに、判定閾値は、高速道路についての判定閾値である高速用閾値が一般道路についての判定閾値である一般用閾値よりも大きい値に設定されている。言い換えると、同じ評価が得られる判定閾値として、高速用閾値の方が一般用閾値よりも大きい値に設定されている。
【0066】
例えば、速度診断の場合を一例に挙げると、高速用閾値として「10秒以上連続して車速80km/hを超えて走行した場合」が設定されており、情報収集部50によって収集された車両の速度が10秒以上連続して80km/hを超えていた場合に、超えていなかった場合よりも低い運転評価値を算出するなどとすればよい。また、一般用閾値として「10秒以上連続して車速60km/hを超えて走行した場合」が設定されており、情報収集部50によって収集された車両の速度が10秒以上連続して60km/hを超えていた場合に、超えていなかった場合よりも低い運転評価値を算出するなどとすればよい。
【0067】
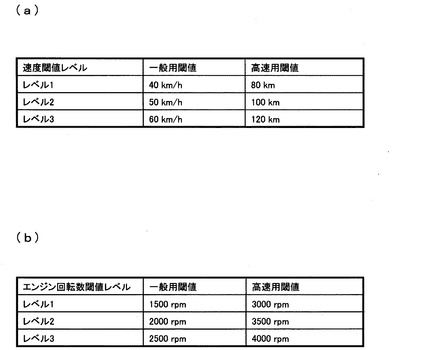
また、高速道路および一般道路のそれぞれについて1種類の判定閾値が用意されている構成であってもよいし、図3(a)および図3(b)に示すように、高速道路および一般道路のそれぞれについて段階的に複数の判定閾値が用意されている構成であってもよい。なお、図3(a)および図3(b)は、高速道路および一般道路のそれぞれについての複数種類の閾値を説明するための図である。また、図3(a)は、速度診断に用いる判定閾値の一例であり、図3(b)は、エンジン回転数診断に用いる判定閾値の一例である。
【0068】
図3(a)で示す速度診断の場合を一例に挙げると、高速用閾値として値の低い判定閾値から順に「80km」、「100km」、「120km」の3段階の速度閾値レベル(レベル1〜レベル3)が設定されており、一般用閾値として値の低い判定閾値から順に「40km」、「50km」、「60km」の3段階の速度閾値レベル(レベル1〜レベル3)が設定されている。なお、例えば図3(a)の各速度の値は、10秒以上連続して超えて走行する場合の値を指しているものとすればよい。
【0069】
また、図3(b)で示すエンジン回転数診断の場合を一例に挙げると、高速用閾値として値の低い判定閾値から順に「3000rpm」、「3500rpm」、「4000rpm」の3段階のエンジン回転数閾値レベル(レベル1〜レベル3)が設定されており、一般用閾値として値の低い判定閾値から順に「1500rpm」、「2000rpm」、「2500rpm」の3段階の速度閾値レベル(レベル1〜レベル3)が設定されている。なお、例えば図3(b)の各エンジン回転数の値は、10秒以上連続して超えて走行する場合の値を指しているものとすればよい。
【0070】
高速道路および一般道路のそれぞれについて段階的に複数の判定閾値を用意する場合には、各判定閾値は、運転診断でより良好な評価がなされる範囲の上限値として定める必要がある。つまり、値の低い判定閾値におさまるほど良好な評価がなされるように定める必要がある。
【0071】
また、運転診断部70は、算出した運転評価値をもとに、警報、記録、通報等のアクションを決定する。例えば、運転診断部70によって、記録が必要と判断された場合は、運転評価値や運転診断に用いた車両情報など、必要な情報を外部メモリ18に記録し、自車両の運行管理を行っている事務所(以下、事務所)のPCなどでの解析・管理に利用可能にしてもよい。また、情報収集部50によって収集された運行管理に必要な情報も外部メモリ18に逐次記録するようにしてもよい。
【0072】
さらに、運転診断部70によって、通報が必要と判断された場合など、自車両と事務所との間での通信が必要な場合は、通信部24を介して運転評価値や運転診断に用いた車両情報や運行管理に必要な情報などを事務所側に送信してもよい。また、運転診断部70によって、走行中に警告や運転診断の結果の通知が必要と判断された場合は、表示装置19や音声出力装置20を利用してドライバへ警告を行ったり、運転診断の結果の通知を行ったりしてもよい。なお、どの程度の運転評価値であった場合に、警報、記録、通報等のどのアクションを行うかについては、任意に設定可能であるものとする。
【0073】
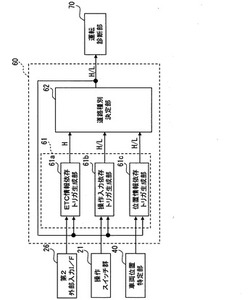
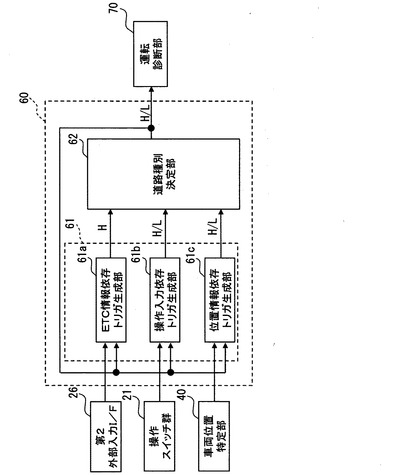
次に、図4を用いて道路種別判定部60についての詳細な説明を行う。図4は、道路種別判定部60の概略的な構成を示す機能ブロック図である。図4に示すように、道路種別判定部60は、道路種別変更トリガ生成部61と道路種別決定部62とを備える。また、道路種別変更トリガ生成部61は、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cからなっている。そして、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cから必要に応じて道路種別決定部62へ道路種別変更要求トリガが出力される。なお、道路種別変更要求トリガについては後に詳述する。
【0074】
また、道路種別決定部62では、道路種別変更トリガ生成部61から道路種別変更要求トリガを受けると、設定されている現在の道路種別を変更する。例えば、「高速道路」と設定されている場合は「一般道路」へ設定を変更し、「一般道路」と設定されている場合は「高速道路」へ設定を変更する。なお、道路種別決定部62が請求項の道路種別決定手段に相当する。また、道路種別決定部62で設定中の道路種別の情報は、表示装置19に表示したり、音声出力装置20から音声出力したりすることによって、ユーザに確認可能となっている構成とすればよい。
【0075】
続いて、道路種別変更トリガ生成部61を構成する3つの構成要素、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cでの処理についてフローチャートを用いて詳細に説明する。
【0076】
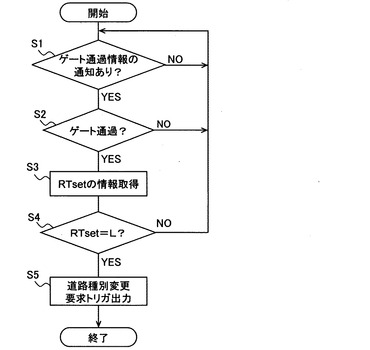
最初に、ETC情報依存トリガ生成部61aでの処理について図5を用いて説明を行う。図5は、ETC情報依存トリガ生成部61aでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。なお、ETC情報依存トリガ生成部61aが請求項のゲート依存判定手段に相当する。また、本フローは、自車両のイグニッションスイッチがオンされるなどして、運行管理装置1の電源がオンされたときに開始される。
【0077】
まず、ステップS1では、ETCゲートを自車両が通過する時にETC路側機とETC車載器2との間で送受信されるゲート通過情報の通知を、ETC車載器2から受けたか否かを判定する。なお、ETC車載器2は、例えばETC路側機と通信中や通信直後の短時間に限って上記通知を行う構成とすればよい。そして、ゲート通過情報の通知をETC車載器2から受けたと判定した場合(ステップS1でYES)には、ステップS2に移る。また、ゲート通過情報の通知をETC車載器2から受けたと判定しなかった場合(ステップS1でNO)には、ステップS1に戻ってフローを繰り返す。
【0078】
ステップS2では、ETC車載器2から通知されたゲート通過情報の解析を行う。そして、ゲート通過情報がゲート通過可能である場合に通信される情報であった場合(ステップS2でYES)には、ゲート通過したものとしてステップS3に移る。また、ETC車載器2にETCカードが挿入されていない場合や、ETCカードの有効期限が過ぎている場合など、ゲート通過不可能である場合に通信される情報であった場合(ステップS2でNO)には、ゲート通過できなかったものとして、ステップS1に戻ってフローを繰り返す。
【0079】
ステップS3では、道路種別決定部62で現在設定済みの道路種別(RTset)を変更するための道路種別変更要求トリガを生成する必要があるか否かを判定するため、設定済み道路種別(RTset)の情報を道路種別決定部62から取得し、ステップS4に移る。
【0080】
ステップS4では、取得した設定済み道路種別(RTset)が「一般道路(L)」であった場合(ステップS4でYES)には、ステップS5に移る。また、取得した設定済み道路種別(RTset)が「高速道路(H)」であった場合(ステップS4でNO)には、ステップS1に戻ってフローを繰り返す。
【0081】
そして、ステップS5では、道路種別変更要求トリガを道路種別決定部62に出力し、フローを終了する。つまり、ETC情報依存トリガ生成部61aでは、設定済み道路種別(RTset)を「一般道路(L)」から「高速道路(H)」へ変更する場合にのみ、道路種別変更要求トリガが道路種別決定部62に出力される。
【0082】
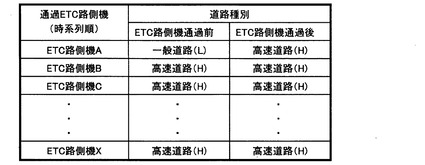
従って、仮にETC情報依存トリガ生成部61aの道路種別変更要求トリガのみに従って道路種別決定部62で道路種別が設定されるとした場合には、図6に示すように、最初に道路種別が「一般道路(L)」から「高速道路(H)」へ変更された後は、何度ETCゲートを通過しようとも、道路種別が「高速道路(H)」から変更されない。
【0083】
なお、図5のフローが終了した後は、例えば一定期間経過後に再びステップS1に戻ってフローを繰り返す構成とすればよい。
【0084】
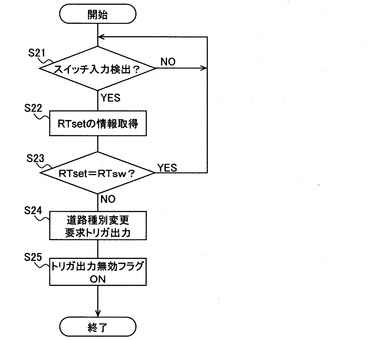
続いて、操作入力依存トリガ生成部61bでの処理について図7を用いて説明を行う。図7は、操作入力依存トリガ生成部61bでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。なお、操作入力依存トリガ生成部61bが請求項の操作入力依存判定手段に相当する。また、本フローは、自車両のイグニッションスイッチがオンされるなどして、運行管理装置1の電源がオンされたときに開始される。
【0085】
まず、ステップS21では、操作スイッチ群21のうちの道路種別設定変更スイッチへの入力の有無をもとに、道路種別設定変更スイッチをドライバが押下したかを監視する。そして、道路種別設定変更スイッチへの入力を検出した場合(ステップS21でYES)には、ステップS22に移る。また、道路種別設定変更スイッチへの入力を検出しなかった場合(ステップS21でNO)には、ステップS21に戻ってフローを繰り返す。
【0086】
ステップS22では、道路種別決定部62で現在設定済みの道路種別(RTset)を変更するための道路種別変更要求トリガを生成する必要があるか否かを判定するため、設定済み道路種別(RTset)の情報を道路種別決定部62から取得し、ステップS23に移る。
【0087】
ステップS23では、ステップS22で取得した設定済み道路種別(RTset)と道路種別設定変更スイッチにより入力されてきた道路種別(以下、スイッチ入力道路種別:RTsw)との比較を行う。そして、設定済み道路種別(RTset)とスイッチ入力道路種別(RTsw)とが異なった場合(ステップS23でNO)には、ステップS24に移る。また、設定済み道路種別(RTset)とスイッチ入力道路種別(RTsw)とが同じであった場合(ステップS23でYES)には、道路種別決定部62に設定済みの道路種別を変更する必要がないものとして、ステップS21に戻ってフローを繰り返す。
【0088】
ステップS24では、道路種別変更要求トリガを道路種別決定部62に出力し、ステップS25に移る。ステップS25では、トリガ出力無効フラグをONにする。このフラグは、後述する位置情報依存トリガ生成部61cにおいて参照するフラグである。なお、トリガ出力無効フラグについては、後に詳述する。
【0089】
また、図7のフローが終了した後は、例えば一定期間経過後に再びステップS1に戻ってフローを繰り返す構成とすればよい。
【0090】
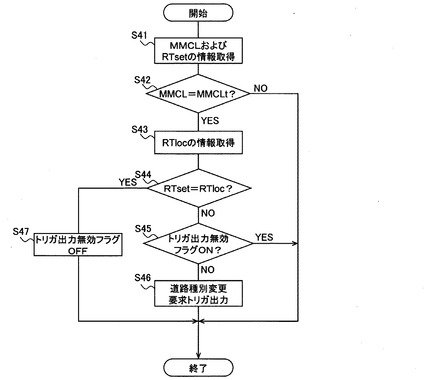
さらに、位置情報依存トリガ生成部61cでの処理について図8を用いて説明を行う。図8は、位置情報依存トリガ生成部61cでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。なお、位置情報依存トリガ生成部61cが請求項の位置依存判定手段に相当する。また、本フローは、自車両のイグニッションスイッチがオンされるなどして、運行管理装置1の電源がオンされたときに開始される。そして、その後は、周期的(例えば200msec〜1000msecごと)に車両位置特定部40によって行われるマップマッチング処理の都度、フローが繰り返される。
【0091】
まず、ステップS41では、車両位置特定部40が算出した現在位置自信度(MMCL)を車両位置特定部40から取得するとともに、設定済み道路種別(RTset)の情報を道路種別決定部62から取得し、ステップS42に移る。
【0092】
ステップS42では、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であるか否かを判定する。よって、位置情報依存トリガ生成部61cが、請求項の自信度判断手段にも相当する。そして、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であると判定した場合(ステップS42でYES)には、ステップS43に移る。また、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であると判定しなかった場合(ステップS42でNO)には、マップマッチング処理における現在位置の特定精度が低下しており、間違った道路種別変更要求トリガを位置情報依存トリガ生成部61cから出力する恐れがあるため、フローを終了する。なお、自信度閾値(MMCLt)は、任意に設定可能な値であって、請求項の所定値に相当する。
【0093】
ステップS43では、マップマッチング処理によって道路リンクにマッチングされた自車両の現在位置に紐づいた道路種別(以下、マッチング道路種別:RTloc)の情報を、地図データ入力器16を介して記憶媒体17から取得し、ステップS44に移る。
【0094】
なお、記憶媒体17から取得する道路種別は、高速自動車国道、都市高速道路、自動車専用道路、一般国道、主要地方道、一般都道府県道、一般市道、町村道等、複数存在するが、ここでは、例えば高速自動車国道、都市高速道路、および自動車専用道路を高速道路とし、高速自動車国道、都市高速道路、および自動車専用道路以外の道路を一般道路とすればよい。また、リンクデータのうちの制限速度のデータをもとに、制限速度が一定以上(例えば80km/h以上など)の道路を高速道路とし、制限速度が一定未満の道路を一般道路とする構成としてもよい。
【0095】
ステップS44では、道路種別決定部62で現在設定済みの道路種別(RTset)を変更するための道路種別変更要求トリガを生成する必要があるか否かを判定するため、ステップS41で取得した設定済み道路種別(RTset)とステップS43で取得したマッチング道路種別(RTloc)との比較を行う。そして、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが異なった場合(ステップS44でNO)には、ステップS45に移る。また、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが同じであった場合(ステップS44でYES)には、道路種別決定部62に設定済みの道路種別を変更する必要がないものとして、ステップS47に移る。
【0096】
つまり、ステップS43からステップS44にかけての処理によって、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定することになる。
【0097】
ステップS45では、トリガ出力無効フラグがONであった場合(ステップS45でYES)には、位置情報依存トリガ生成部61cによる設定済み道路種別(RTset)の変更を行うことができないものとして、フローを終了する。また、トリガ出力無効フラグがONでなかった場合(ステップS45でNO)には、ステップS46に移る。そして、ステップS46では、道路種別変更要求トリガを道路種別決定部62に出力し、フローを終了する。
【0098】
ここで、トリガ出力無効フラグについて詳しく説明を行う。トリガ出力無効フラグは、操作入力依存トリガ生成部61bにおいてセットされるフラグであり、このトリガ出力無効フラグがONされている間は、位置情報依存トリガ生成部61cから道路種別変更要求トリガを出力できないようにする無効化が行われる。これは、ドライバからの操作入力によって変更された道路種別を真値であるとし、マップマッチング処理後の現在位置自信度(MMCL)の状態に関わらず道路種別を変更できないようにするためである。
【0099】
これによれば、位置情報依存トリガ生成部61cによる道路種別の誤判定によって「高速道路」を「一般道路」と判定した場合であって、ドライバが道路種別設定変更スイッチへの入力によって道路種別を正しく修正した後は、位置情報依存トリガ生成部61cからの道路種別変更要求トリガによって周期的に誤った再変更が行われることを防ぐことができる。
【0100】
また、トリガ出力無効フラグのOFFについて説明する。トリガ出力無効フラグのOFFは、ステップS47で行われる。つまり、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが同じであった場合にトリガ出力無効フラグがOFFされる。なお、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが同じである場合とは、マップマッチングの結果が修正されて正しい道路種別が取得されたことを意味しているため、マップマッチング処理の精度が十分に回復したり上がったりしたところで、トリガ出力無効フラグをOFFすることになる。そして、トリガ出力無効フラグがOFFされた場合には、無効化が解除され、位置情報依存トリガ生成部61cから道路種別変更要求トリガを出力できるようになる。よって、道路種別変更トリガ生成部61が請求項の無効化手段および無効化解除手段に相当する。
【0101】
これによれば、位置情報依存トリガ生成部61cにおいて、より正確である可能性の高いマッチング道路種別(RTloc)が得られるようになってから無効化を解除することにより、道路種別決定部62でより正確な道路種別が設定されることを担保することが可能になる。
【0102】
また、道路種別決定部62では、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれで判定した道路種別の判定結果をもとに、最終的な道路種別を決定する。詳しくは、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれから出力される道路種別変更要求トリガに従って道路種別を変更することによって、最終的な道路種別を決定する。そして、道路種別決定部62では、決定した道路種別を運転診断部70に通知する。
【0103】
なお、前述の無効化が継続されている状態にある場合を除き、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれから出力される道路種別変更要求トリガのうち、時間的に後に出力された道路種別変更要求トリガに従って、道路種別決定部62の設定済み道路種別(RTset)を変更する構成とすればよい。つまり、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれの判定結果のうち、時間的に後に得られた判定結果に従って、道路種別決定部62の設定済み道路種別(RTset)を変更する構成とすればよい。
【0104】
これによれば、道路種別決定部62の設定済み道路種別(RTset)が道路種別変更トリガ生成部61で判定した道路種別と異なる場合は、前述の無効化が継続されている状態にある場合を除き、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれの道路種別変更要求トリガの出力のタイミングで道路種別の設定を変更することができる。
【0105】
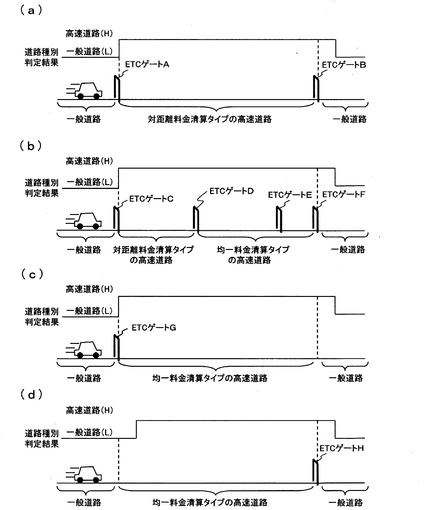
ここで、図9(a)〜図9(d)を用いて、運行管理装置1における道路種別の設定のタイミングの一例を示す。なお、図9(a)〜図9(d)は、運行管理装置1における道路種別の設定のタイミングの一例を示す図である。
【0106】
図9(a)の例は、一般道路からETCゲートAを通過して対距離料金精算タイプの高速道路に進入した後、対距離料金精算タイプの高速道路からETCゲートBを通過して一般道路に出る場合の例である。図9(a)のような場合には、ETCゲートAを通過したところでETC情報依存トリガ生成部61aから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、ETCゲートBを通過した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0107】
また、図9(b)の例は、一般道路からETCゲートCを通過して対距離料金精算タイプの高速道路に進入した後、対距離料金精算タイプの高速道路からETCゲートDを通過して均一料金精算タイプの高速道路に進入し、ETCゲートE・Fを通過した後に一般道路に出る場合の例である。図9(b)のような場合には、ETCゲートCを通過したところでETC情報依存トリガ生成部61aから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、ETCゲートD・E・Fを通過した場合であっても、ETC情報依存トリガ生成部61aから道路種別変更要求トリガは出力されず、ETCゲートFを通過した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0108】
さらに、図9(c)の例は、入口にしかETCゲートがない均一料金精算タイプの高速道路を通過する場合の例であって、一般道路からETCゲートGを通過して均一料金精算タイプの高速道路に進入した後、ETCゲートを通過せずに一般道路に出る場合の例である。図9(c)のような場合には、ETCゲートGを通過したところでETC情報依存トリガ生成部61aから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、均一料金精算タイプの高速道路から一般道路に出た後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0109】
また、図9(d)の例は、出口にしかETCゲートがない均一料金精算タイプの高速道路を通過する場合の例であって、一般道路からETCゲートを通過せずに均一料金精算タイプの高速道路に進入した後、ETCゲートHを通過して一般道路に出る場合の例である。図9(d)のような場合には、一般道路から均一料金精算タイプの高速道路に進入した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、ETCゲートHを通過した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0110】
なお、道路種別決定部62は、位置情報依存トリガ生成部61cからの道路種別変更要求トリガおよびETC情報依存トリガ生成部61aからの道路種別変更要求トリガのうちの少なくともいずれかの出力のタイミングと操作入力依存トリガ生成部61bからの道路種別変更要求トリガの出力のタイミングとが重なった場合には、操作入力依存トリガ生成部61bからの道路種別変更要求トリガを優先して、道路種別を決定し、道路種別の設定の変更を行う構成とすればよい。
【0111】
これによれば、ゲート通過情報や自車両の位置情報をもとに判定した道路種別の判定結果よりも正確な判定結果である可能性が高い道路種別設定変更スイッチの操作による道路種別の判定結果を用いて、道路種別の決定を行うことが可能になるので、より正確に道路種別の決定を行うことが可能になる。
【0112】
また、道路種別決定部62は、位置情報依存トリガ生成部61cからの道路種別変更要求トリガの出力のタイミングとETC情報依存トリガ生成部61aからの道路種別変更要求トリガの出力のタイミングとが重なった場合には、ETC情報依存トリガ生成部61aからの道路種別変更要求トリガを優先して、道路種別を決定し、道路種別の設定の変更を行う構成としてもよい。
【0113】
さらに、以上の構成によれば、位置情報依存トリガ生成部61cからの道路種別変更要求トリガの出力は、マップマッチング処理の自信度である現在位置自信度(MMCL)が高い場合にのみに行うので、道路種別判定部60による間違った道路種別の設定を極力減らすことができる。また、短い周期(前述の例では200ms〜1000ms程度)で定期的に位置情報依存トリガ生成部61cでの処理を実施するため、現在位置自信度(MMCL)が上がれば即座に、位置情報依存トリガ生成部61cから出力される道路種別変更要求トリガに従って道路種別の変更を行うことができる。これにより、ETC路側機が設定されていない料金所ゲートを通過する場合や、ETC車載器2を搭載しない車両に運行管理装置1を搭載した場合であっても道路種別決定部62に設定された道路種別の変更を行うことが可能になっている。
【0114】
また、以上の構成では、道路種別決定部62における道路種別の設定の変更は、基本的には自車両の位置情報をもとに行い、ゲート通過情報は、自車両が高速道路上にいることを判定するためにのみ用いられる。これにより、自車両の高速道路本線への合流前に、確実に道路種別決定部62における道路種別を「高速道路」に変更することができるとともに、高速道路を走行中において走行中の道路を一般道路と判定してしまう誤判定を極力発生させないようにすることができる。
【0115】
さらに、以上の構成では、道路種別判定部60には、手動によって道路種別の設定の変更を行う手動変更モードと自動で道路種別の設定の変更を行う自動変更モードがあり、ゲート通過情報や自車両の位置情報をもとにした自動変更モードによって決定された道路種別が実際の走行中の道路の道路種別と一致しない場合に、道路種別設定変更スイッチからユーザが任意に道路種別の設定を是正することができる。
【0116】
詳しくは、現在走行している道路の実際の道路種別と道路種別決定部62に設定されている道路種別とが異なる場合に、道路種別設定変更スイッチを操作することでドライバが任意に変更できるようになっている。そして、ユーザからの道路種別設定変更スイッチの操作(つまり、手動)による道路種別の設定の変更を「真値」として扱うことで、手動による道路種別の設定の変更が行われた場合には、ゲート通過情報や自車両の位置情報をもとに道路種別判定部60で決定された道路種別と実際の走行中の道路の道路種別とが乖離しているものと考え、一時的にゲート通過情報や自車両の位置情報をもとにした道路種別の設定の変更(つまり、自動変更)を前述の無効化によって停止する。
【0117】
また、前述の無効化の状態となった場合には、自動変更モードから手動変更モードに切り替わる。そして、前述したように、道路種別設定変更スイッチの入力をもとに設定された道路種別と自車両の位置情報をもとに判定した道路種別とが一致するまで、ゲート通過情報や自車両の位置情報をもとにした自動変更モードには復帰しないことなる。このような構成は、地図データが古い場合やマップマッチング処理においてマッチングミスが発生している場合など、自車両の位置情報をもとにした判定の精度が十分でないと推測される状態において有効である。
【0118】
さらに、以上の構成によれば、トリガ無効フラグを導入することにより、前述したように手動変更モードと自動変更モードとをシームレスに切り替えることができるようになるので、ユーザの操作負担を軽減することができる。
【0119】
なお、前述の実施形態では、手動変更モードに切り替わった後に自車両が高速道路を降りて一般道路を走行している場合に、道路種別設定変更スイッチによる道路種別の設定の変更を忘れていると、道路種別決定部62における道路種別の設定は「高速道路」のままとなり、誤った設定が維持され続けてしまう。
【0120】
そこで、手動変更モードに切り替わってトリガ出力無効フラグがONとなり、前述の無効化が継続されている状態においても、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であって、無効化の継続が所定期間以上に達している場合に、「現在走行中の道路は高速道路でよいか」や「現在走行中の道路は一般道路ではないか」等の現在走行中の道路の道路種別の確認をユーザに促す旨の報知を、道路種別判定部60が表示装置19や音声出力装置20で行わせる構成とすることが好ましい。
【0121】
なお、ここで言うところの自信度閾値(MMCLt)は、ステップS42における自信度閾値(MMCLt)と同じ値であってもよいし、違う値であってもよい。また、ここで言うところの所定期間は、任意に設定可能な値であって、例えば数十分としてもよい。さらに、上記報知は、表示装置19での表示によって行う構成としてもよいし、音声出力装置20での音声出力によって行う構成としてもよい。よって、表示装置19および音声出力装置20が請求項の報知手段に相当する。
【0122】
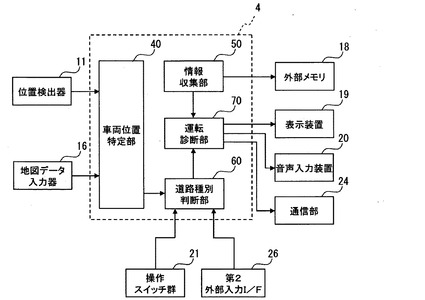
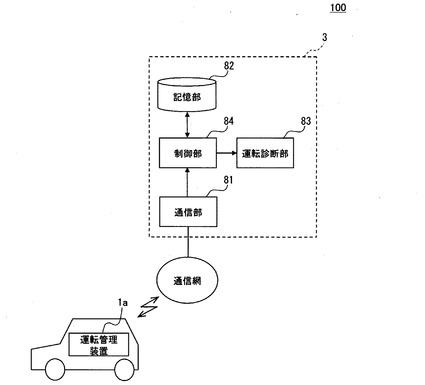
また、前述の実施形態では、運転診断を運行管理装置側で行う構成を示したが、必ずしもこれに限らない。例えば、運転診断を運行管理装置と通信可能な管理センタで行う構成としてもよい。以下では、この構成について図10を用いて説明を行う。図10は、本発明が適用された運行管理システム100の概略的な構成を示す図である。なお、説明の便宜上、前述の実施形態の説明に用いた図に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0123】
また、図10に示す運行管理システム100は、車両に搭載される運行管理装置1aおよび管理センタ3を備えている。なお、運行管理システム100が請求項の運転状態評価システムに相当し、運行管理装置1aが請求項の車載器に相当する。
【0124】
運行管理装置1aは、運転診断部70に相当する機能を備えない点を除けば、運行管理装置1と同様のものである。なお、運行管理装置1aは、道路種別決定部62に設定されている道路種別の情報や情報収集部50で収集した車両情報を通信部24から通信網を介して管理センタ3に送信する。よって、通信部24が請求項の送信手段に相当し、情報収集部50が請求項の車両情報収集手段に相当する。
【0125】
管理センタ3は、サーバから構成されており、通信網を介して運行管理装置1と通信することが可能な通信部81、通信部81で受信した道路種別情報や車両情報を格納する記憶部82、運転診断を行う運転診断部83、および通信の制御や運転診断の処理等を制御する制御部84を備えている。よって、通信部81が請求項の受信手段に相当する。なお、管理センタ3は、1つのサーバからなるものであってもよいし、複数のサーバからなっているものであってもよい。
【0126】
運転診断部83は、運転診断部70と同様のものであって、通信部81で受信した車両情報および道路種別に基づき、所定の閾値を判定閾値として道路種別に適した運転診断を実施して運転評価値を算出する。また、判定閾値は、運転診断部70と同様に、高速用閾値と一般用閾値とが予め用意されており、通信部81で受信した道路種別に従って、高速用閾値と一般用閾値とのうちのいずれかを運転診断に用いる判定閾値として設定する。よって、運転診断部83が請求項の閾値変更手段および運転診断手段に相当する。
【0127】
以上の構成によれば、運転診断を管理センタ3側で行うので、運行管理装置1a側で運転診断の処理を行う必要がなくなり、運行管理装置1a側の処理の負荷を低減することができる。また、運転診断を管理センタ3側で行うため、ためのソフトウェアを備える必要がなく、運行管理装置1a構成をより簡略化することができる側での運転診断の処理の負荷を
なお、前述の実施形態では、ECU26が第2外部入力I/F26およびETC車載器2を介して、ETCゲートに設けられたETC路側機からゲート通過情報を取得する構成を示したが、必ずしもこれに限らない。例えば、ETCゲート以外の高速道路の料金所ゲートに設置された路側アンテナ等から無線通信で送信されるゲート通過情報を車両側の図示しない無線通信部で受信し、受信したゲート通過情報を第2外部入力I/F26を介してECU26が取得する構成としてもよい。
【0128】
また、前述の実施形態では、操作スイッチ群21のうちの道路種別設定変更スイッチによって、自車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力を受け付ける構成を示したが、必ずしもこれに限らない。例えば、図示しない音声入力装置によって、自車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力を受け付ける構成としてもよい。
【0129】
なお、運行管理装置1は、例えばトラックやタクシー等の事業用自動車の運転診断の結果をもとに事業用自動車のドライバの給料の査定が行われるなどの場合に、事業用自動車に搭載する構成とすることが好適である。これによれば、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことができるため、ドライバのモチベーションを下げずに済む。
【0130】
また、運行管理装置1は、例えば自家用自動車の運転診断の結果をもとにエコノミー・エコロジー的走行の評価が行われる場合に、自家用自動車に搭載する構成とすることが好適である。これによれば、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことができるため、ドライバのモチベーションを下げずに済む。
【0131】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0132】
1 運行管理装置(運転状態評価装置)、1a 運行管理装置(車載器)、2 ETC車載器、3 管理センタ、11 位置検出器(位置検出手段)、12 ジャイロスコープ、13 加速度センサ、14 車輪速センサ、15 GPS受信機、16 地図データ入力器、17 記憶媒体(地図データ記憶手段)、18 外部メモリ、19 表示装置(報知手段)、20 音声出力装置(報知手段)、21 操作スイッチ群、22 リモコン、23 リモコンセンサ、24 通信部(送信手段)、25 第1外部入力I/F、26 第2外部入力I/F、27 ECU、40 車両位置特定部、50 情報収集部(車両情報収集手段)、60 道路種別判定部、61 道路種別変更トリガ生成部(無効化手段)、61a ETC情報依存トリガ生成部(ゲート依存判定手段)、61b 操作入力依存トリガ生成部(操作入力依存判定手段)、61c 位置情報依存トリガ生成部(位置依存判定手段、自信度判断手段)、62 道路種別決定部(道路種別決定手段)、70 運転診断部、81 通信部(受信手段)、82 記憶部、83 運転診断部(閾値変更手段、運転診断手段)、84 制御部、100 運行管理システム(運転状態評価システム)
【技術分野】
【0001】
本発明は、運転状態評価装置および運転状態評価システムに関するものである。
【背景技術】
【0002】
近年、GPS(Global Positioning System)を利用して検出した車両の現在位置情報および車両の各種センサ等から得られる車両の挙動情報や操作情報(以下、車両情報)などを収集し、携帯電話通信網を利用して事務所に送信することにより、管理者が車両の運行情報をリアルタイムに把握できるようにする運行管理システムが導入されている。また、収集した車両情報を利用して車両の運行中に省燃費運転や安全運転の診断といった運転の良否に関する診断(以下、運転診断)を行い、この運転診断に基づいた警報や運転アドバイスをドライバに行うことにより運転技術を向上させる運転教示機能を搭載した車載器も実用化されている。
【0003】
ここで、運転教示機能は大きく、省燃費運転診断と安全運転診断の2つに大別される。まず、省燃費運転診断には、エンジン回転数診断、アイドリング診断、波状運転診断などがあり、例えばエンジン回転数診断では、設定した回転数を超過した状態を所定時間継続した場合などに警報が発せられたり、低い評価がなされたりする。また、安全運転診断においては、速度診断、加速減速診断、旋回診断等が該当し、例えば速度診断では、設定した速度を超えて所定時間継続して走行した場合に警報が発せられたり、低い評価がなされたりする。
【0004】
このように、各種の運転診断を行う場合には、運転診断に用いるための閾値を設定することが必要になるが、例えば速度診断やエンジン回転数診断などのように、同一の運転診断においても走行中の道路種別が一般道路であるか高速道路であるかで最適な閾値が異なってくる運転診断では、閾値を走行環境に応じて設定しないと正確な運転診断が行えない。
【0005】
これに対して、走行中の道路種別が一般道路であるか高速道路であるかを判定する技術が従来から知られている。
【0006】
例えば、特許文献1には、高速道路の料金所のETC(登録商標)ゲートに設置されたETCの路側アンテナと車載器との間で送受信される入口情報と出口情報をもとに、高速道路と一般道路との判定を行う技術が開示されている。
【0007】
しかしながら、特許文献1に開示の技術では、対距離料金精算タイプの高速道路の入口・出口を通過する場合には、高速道路と一般道路との判定を確実に行うことができるが、対距離料金精算タイプの道路と都市高速などの均一料金精算タイプの道路とが合わさったルートを走行する場合に、高速道路と一般道路との判定を正しく行うことができなくなるおそれがある。
【0008】
例えば、対距離料金精算タイプの道路から均一料金精算タイプの道路へ乗り換える場合、特許文献1に開示の技術では、対距離料金精算タイプの道路での精算を行うためのETCゲートを通過した時点で出口を通過したと判定し、一般道路に進入したと判定することになるが、実際にはまだ高速道路を走行している。また、入口および出口の一方にしかETCゲートが設置されていない都市高速などの道路を走行する場合にも同様の問題が生じる。
【0009】
そこで、この問題を解決する手段として、例えば、特許文献2には、高速道路の入口料金所や出口料金所のゲートに設置された質問器と車両に搭載された応答器との間で送受信される入口情報と出口情報に加え、GPSを利用して検出した車両の現在位置をもとに地図データベースから取得した道路種別情報を用いることによって、高速道路と一般道路との判定を行う技術が開示されている。詳しくは、特許文献2に開示の技術では、出口情報を受信した場合には、一般道路に進入したと判定する一方、出口情報を受信しなかった場合には、車両の現在位置をもとに地図データベースから取得した道路種別情報をもとに、高速道路と一般道路との判定を行う。
【0010】
また、特許文献3には、高速道路入口で渡される通行カードからカードリーダがデータを読み取ることで、車両が高速道路に進入したと判定するともに、GPSを利用して検出した車両の現在位置が地図データを記憶したCD−ROMに記憶されている高速道路の出口位置を通過した場合に車両が一般道路に進入したと判定する技術が開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2008−90348号公報
【特許文献2】特開2001−291125号公報
【特許文献3】特開平11−2541号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献2に開示の技術は、高速道路の下を一般道路が並行して走っており、車両が一般道路を走行中か高速道路を走行中であるか判定することができない状況では、高速道路を一般道路と誤判定してしまう問題点が生じる。また、特許文献2に開示の技術は、対距離料金精算タイプの高速道路から都市高速などの均一料金精算タイプの道路へ乗り換える地点に料金所のゲートが設置されており、このゲートで出口情報を受信した場合に、高速道路を走行中にも一般道路を走行中と誤判定してしまう問題点が生じる。
【0013】
また、特許文献3に開示の技術でも、高速道路の下を一般道路が並行して走っており、車両が一般道路を走行中か高速道路を走行中であるか判定することができない状況では、高速道路を一般道路と誤判定してしまう問題点が生じる。
【0014】
つまり、従来の技術では、高速道路を走行中であっても一般道路を走行中であると誤判定してしまう問題点が生じる。この問題点は、走行中の道路種別が一般道路であるか高速道路であるかを判定し、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合に、特に不具合を生じさせる。
【0015】
詳しくは、速度診断やエンジン回転数診断などのように、高速道路についての閾値が一般道路についての閾値よりも高く設定される運転診断においては、高速道路を走行中にも関わらず一般道路を走行中であると誤判定された場合、適切な閾値よりも低い閾値によって診断が行われる。そして、このような誤った閾値によって誤診断が行われることにより、良好な運転をしているにも関わらず警報を受けたり、低い評価を受けたりするなど、ドライバに対しての評価が下がってしまうという問題点が生じる。また、このような評価を下げる誤診断の発生は、ドライバのモチベーションを下げることになるので、運転診断を行う装置の商品価値を低下させることにもなる。
【0016】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことを可能にする運転状態評価装置および運転状態評価システムを提供することにある。
【課題を解決するための手段】
【0017】
請求項1の運転状態評価装置によれば、高速道路の料金所ゲートを車両が通過したことを検出した場合に、車両の走行中の道路が高速道路であるとのみゲート依存判定手段が判定することになる。よって、ゲート依存判定手段では、対距離料金精算タイプの高速道路から均一料金精算タイプの高速道路へ料金所ゲートを通過して乗り換えた場合に、高速道路を一般道路と誤判定することがない。
【0018】
また、以上の構成によれば、ゲート依存判定手段での判定結果だけでなく、車両の現在位置と地図データとをもとにした位置依存判定手段での判定結果をもとに、道路種別決定手段が車両の走行中の道路が高速道路であるか一般道路であるかを決定することになる。従って、高速道路から一般道路へ料金所ゲートを通過して乗り換えた場合に、高速道路を走行中とゲート依存判定手段で判定が行われるが、位置依存判定手段での判定結果をもとに、車両の走行中の道路が高速道路であるか一般道路であるかを正しく決定することが可能になる。
【0019】
さらに、位置依存判定手段での判定は逐次行われるため、もし、ゲート依存判定手段の判定結果をもとに、一般道路を高速道路と決定する誤判定が行われた場合であっても、位置依存判定手段での判定結果をもとに、速やかに正しく決定し直すことが可能になる。
【0020】
また、以上の構成によれば、高速道路の下を一般道路が並行して走っている状況下で、車両が高速道路を走行中であるにもかかわらず、位置依存判定手段が誤って車両の走行道路が一般道路であると判定してしまった場合であっても、ゲート依存判定手段の判定結果をもとに、速やかに正しく決定し直すことが可能になる。
【0021】
従って、以上の構成によれば、特に高速道路を走行中において走行中の道路を一般道路と誤判定することがなくなる。
【0022】
また、以上の構成では、運転の良否に関する診断である運転診断でより良好な評価がなされる範囲の上限値として閾値が定められており、高速道路についてのその閾値が一般道路についてのその閾値よりも大きい値に設定されているので、高速道路を走行中において走行中の道路を一般道路と仮に誤判定したとすると、高速道路において適切な閾値よりも良好な評価がなされる範囲が狭い閾値が設定されることになる。そして、高速道路において適切な閾値よりも良好な評価がなされる範囲が狭い閾値が設定された場合には、運転診断において、良好な運転をしているにも関わらず、より低い評価がなされてしまう問題が生じる。
【0023】
しかしながら、以上の構成によれば、前述したように、高速道路を走行中において走行中の道路を一般道路と誤判定することがないので、上述のようなドライバに対しての評価を下げる誤診断を防ぐことができる。
【0024】
その結果、以上の構成によれば、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことが可能になる。
【0025】
また、請求項12の運転状態評価システムでも、高速道路の料金所ゲートを車両が通過したことを検出した場合に、車両の走行中の道路が高速道路であるとのみ判定するゲート依存判定手段と、車両の現在位置と地図データとをもとに車両の走行中の道路が高速道路であるか一般道路であるかを判定する位置依存判定手段との判定結果をもとに、道路種別決定手段が車両の走行中の道路が高速道路であるか一般道路であるかを決定することになる。よって、以上の構成によっても、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるのかをより精度よく決定できる上に、高速道路を走行中において走行中の道路を一般道路と誤判定することがなくなる。
【0026】
従って、運転診断でより良好な評価がなされる範囲の上限値として定められているとともに高速道路についての値が一般道路についての値よりも大きい値に設定されている閾値を用いた管理センタでの運転診断において、ドライバに対しての評価を下げる誤診断を防ぐことができる。
【0027】
その結果、以上の構成によっても、判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことが可能になる。
【0028】
また、請求項2によれば、自信度判断手段で判断した現在位置自信度が所定値未満である場合には、位置依存判定手段での判定結果を用いずに、道路種別決定手段での決定を行なうことになる。よって、以上の構成によれば、位置依存判定手段での判定の精度が十分でない場合に、位置依存判定手段の判定結果を用いずに上記決定を行うことで、間違った決定を行いにくくすることが可能になる。
【0029】
さらに、以上の構成によれば、自信度判断手段で現在位置自信度を定期的に判断するので、位置依存判定手段での判定の精度が十分と言えるほどに現在位置自信度が上がったところで速やかに位置依存判定手段の判定結果を用いて上記決定を行い、より正確な決定を行うことが可能になる。
【0030】
また、請求項3によれば、操作入力依存判定手段での判定結果は、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力結果をもとに判定した判定結果であるので、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを正確に判定した判定結果である可能性が高い。つまり、操作入力依存判定手段での判定結果は、より正確な判定結果と考えられる。以上の構成によれば、このより正確な判定結果を用いて、道路種別決定手段での決定を行うことが可能になるので、より正確に上記決定を行うことが可能になる。
【0031】
なお、操作入力依存判定手段での判定結果は、ユーザからの入力結果をもとに判定した判定結果であるので、位置依存判定手段での判定結果よりも正確な判定結果である可能性が高い。
【0032】
これに対して、請求項4によれば、操作入力依存判定手段での判定結果が得られた場合には、当該判定結果と異なる位置依存判定手段での判定結果を道路種別決定手段で用いることができないようにする無効化を行うので、操作入力依存判定手段での判定結果よりも正確でない可能性が高い位置依存判定手段での判定結果をもとに、道路種別決定手段で誤った決定が行なわれることを防ぐことが可能になる。
【0033】
また、無効化手段により位置依存判定手段の無効化が継続されているときに操作入力依存判定手段での判定結果と同じ判定結果が位置依存判定手段で得られた場合に、無効化手段による無効化を解除するので、位置依存判定手段での判定の精度が十分に回復したり上がったりしたところで、位置依存判定手段での判定結果も道路種別決定手段で用いられるようにすることが可能になる。従って、より正確である可能性の高い位置依存判定手段での判定結果が得られるようになってから無効化を解除することにより、道路種別決定手段でより正確に上記決定が行われることを担保することが可能になる。
【0034】
また、請求項5によれば、無効化手段による無効化が継続している場合であっても、自信度判断手段で判断した現在位置自信度が、位置依存判定手段での判定の精度が十分と言えるほど高い場合に、現在走行中の道路の道路種別の確認をユーザに促す報知を行うことが可能になる。よって、例えばユーザの勘違いによる操作入力手段への入力や操作入力手段への入力忘れを原因とする操作入力依存判定手段での誤判定が生じたまま、無効化手段による無効化が継続してしまっている可能性がある場合に、現在走行中の道路の道路種別の確認をユーザに促す報知を行って、勘違いによる操作入力手段への入力や操作入力手段への入力忘れをユーザに気付かせることが可能になる。そしてその結果、操作入力依存判定手段での判定結果が正確になるような操作入力部への入力をユーザに行わせることが可能になる。
【0035】
また、請求項6によれば、無効化手段による無効化が継続されている状態にある場合を除き、時間的に後に得られた判定結果に従って、道路種別決定手段での決定を行なうので、無効化が継続されている状態にある場合を除き、最新の判定結果に従って、より正確に上記決定を行うことが可能になる。
【0036】
また、請求項7によれば、時間的に後に得られた判定結果に従って、道路種別決定手段での決定を行なうので、最新の判定結果に従って、より正確に上記決定を行うことが可能になる。
【0037】
また、請求項8によれば、位置依存判定手段での判定のタイミングおよびゲート依存判定手段での判定のタイミングのうちの少なくともいずれかと操作入力依存判定手段での判定のタイミングとが重なった場合に、操作入力依存判定手段での判定結果を優先して道路種別決定手段での決定を行なうことになる。
【0038】
操作入力依存判定手段での判定結果は、ユーザからの入力結果をもとに判定した判定結果であるので、位置依存判定手段での判定結果やゲート依存判定手段での判定結果よりも正確な判定結果である可能性が高い。つまり、操作入力依存判定手段での判定結果は、より正確な判定結果と考えられる。以上の構成によれば、より正確な判定結果を用いて、上記決定を行うことが可能になるので、より正確に上記決定を行うことが可能になる。
【0039】
また、請求項9のように、道路種別決定手段が、位置依存判定手段での判定のタイミングとゲート依存判定手段での判定のタイミングとが重なった場合には、ゲート依存判定手段での判定結果を優先して、車両の走行中の道路が高速道路であるか一般道路であるかを決定する態様としてもよい。
【0040】
また、請求項10のように、高速道路の料金所ゲートが、ゲート通過に関連する情報であるゲート通過情報を送信するETCゲートであり、ETCゲートから送信されたゲート通過情報を取得するゲート通過情報取得手段を運転状態評価装置が備え、ゲート依存判定手段が、ゲート通過情報取得手段でゲート通過情報を取得した場合に、当該ETCゲートを車両が通過したと検出する態様としてもよい。
【0041】
また、請求項11のように、閾値として高速道路および一般道路のそれぞれについて段階的に複数の値が設定されており、運転診断において、この複数の値を用いることによって段階的な評価が行われる態様としてもよい。
【図面の簡単な説明】
【0042】
【図1】運行管理装置1の概略的な構成を示す図である。
【図2】ECU27の概略的な構成を示す機能ブロック図である。
【図3】(a)および(b)は、高速道路および一般道路のそれぞれについての複数種類の判定閾値を説明するための図である。
【図4】道路種別判定部60の概略的な構成を示す機能ブロック図である。
【図5】ETC情報依存トリガ生成部61aでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。
【図6】ETC情報依存トリガ生成部61aの道路種別変更要求トリガによる道路種別の変更例を説明するための図である。
【図7】操作入力依存トリガ生成部61bでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。
【図8】位置情報依存トリガ生成部61cでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。
【図9】運行管理装置1における道路種別の設定のタイミングの一例を示す図である。
【図10】運行管理システム100の概略的な構成を示す図である。
【発明を実施するための形態】
【0043】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された運行管理装置1の概略的な構成を示す図である。図1に示す運行管理装置1は、トラック、タクシー、自家用車等の車両に搭載されるものであり、位置検出器11、地図データ入力器16、記憶媒体17、外部メモリ18、表示装置19、音声出力装置20、操作スイッチ群21、リモコン22、リモコンセンサ23、通信部24、第1外部入力インターフェース(I/F)25、第2外部入力I/F26、およびこれらと接続されたECU27を備えている。なお、運行管理装置1が請求項の運転状態評価装置に相当する。また、運行管理装置1を搭載している車両を以降では自車両と呼ぶ。なお、本実施形態では、車両に搭載されるナビゲーション装置に本発明を適用した場合を例に挙げて説明を行う。
【0044】
位置検出器11は、車両の鉛直方向周りの角速度を検出するジャイロスコープ12、自車両の加速度を検出する加速度センサ13、各転動輪の回転速度から自車両の速度を検出する車輪速センサ14、および人工衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有しており、定期的に自車両の現在位置の検出を行う。よって、位置検出器11が請求項の位置検出手段に相当する。これらの各センサ12〜15は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては上述した内の一部で構成してもよく、さらに、図示しない地磁気センサやステアリングの回転センサ等を用いてもよい。
【0045】
なお、運行管理装置1では、自律航法と電波航法とを組み合わせたハイブリッド航法によって自車両の現在位置を特定する。そして、特定した現在位置と後述する道路データとを照合することによって自車両の走行中の道路を特定し、道路上に最終的な自車両の現在位置を特定する。なお、自律航法とは、ジャイロスコープ12等の方位センサの測定値と加速度センサ13や車輪速センサ14の測定値とから自車両の現在位置を推定する方法である。また、電波航法とは、複数の人工衛星からの電波に基づいてGPS受信機15で自車両の座標(緯度・経度)を測位し、現在位置を推定する方法である。なお、自車両の現在位置を特定し、特定した現在位置と道路データとを照合して自車両の現在位置を後述の地図データ中の道路リンクにマッチング(つまり、一致)させる処理を本実施形態ではマップマッチング処理と呼ぶこととする。
【0046】
地図データ入力器16は、記憶媒体17が装着され、その記憶媒体17に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンク方向、リンク方位、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、および制限速度等の各データから構成される。よって、記憶媒体17が請求項の地図データ記憶手段に相当する。
【0047】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0048】
また、記憶媒体17には、各種施設の種類、名称、住所のデータなども記憶されており、それらのデータは経路探索の際の目的地設定などに用いられる。なお、記憶媒体17としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0049】
外部メモリ18は、HDD等の書き込み可能な大容量記憶装置である。外部メモリ18には大量のデータや電源をOFFしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器16からコピーして利用したりする等の用途がある。
【0050】
表示装置19は、車両の走行を案内するための地図、目的地選択画面、後述の運転診断の結果等を表示するものであって、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。音声出力装置20は、スピーカ等から構成され、ECU27の指示に基づいて、経路案内時の案内音声、後述の問い合わせ音声などを出力する。
【0051】
操作スイッチ群21は、例えば表示装置19と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作によりECU27へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整、道路種別設定変更等)の操作指示を行う。また、操作スイッチ群21は、後述する道路種別決定部62で設定済みの道路種別を変更するためのスイッチ(以下、道路種別設定変更スイッチと呼ぶ)を含んでいる。そして、この道路種別設定変更スイッチを操作することによって、ユーザ(例えばドライバ)は、道路種別の設定の変更の要求をECU27に行うことができる。つまり、車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力をこの道路種別設定変更スイッチで受け付けることになる。よって、操作スイッチ群21が請求項の操作入力手段に相当する。
【0052】
リモコン22には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ23を介して各種指令信号をECU27に入力することにより、操作スイッチ群21と同じ機能をECU27に対して実行させることが可能である。
【0053】
通信部24は、通信網を介して、自車両の運行管理を行っているセンタとの間で通信を行うものである。なお、ここで言うところのセンタには、例えば自車両の運行管理を行っている事務所のサーバ等が該当する。また、通信部24は、例えば自車両に搭載されるDCM(data communication module)等のテレマティクス通信に用いられる車載通信モジュールを通じて通信網に接続する構成としてもよいし、例えばBluetooth(登録商標)等で接続した携帯電話機を通じて通信網に接続する構成としてもよい。
【0054】
第1外部入力I/F25は、自車両の各種センサ群から車両の運転操作に関する情報(以下、操作情報)や車両の挙動に関する情報(以下、挙動情報)などの情報(以下、車両情報)を取得するためのインターフェースである。なお、操作情報としては、例えばアクセル開度センサから得られるアクセル開度の情報、スロットル開度センサから得られるスロットル開度の情報、エンジン回転数センサから得られるエンジン回転数の情報、およびブレーキストロークセンサから得られるブレーキペダルの踏み込み量の情報などがある。また、挙動情報としては、加速度センサ13から得られる車両の加減速度の情報、車輪速センサ14や車速センサから得られる車両の速度の情報などがある。
【0055】
第2外部入力I/F26は、ETC(登録商標)車載器2からECU27が情報を取得するためのインターフェースである。よって、第2外部入力I/F26およびECU27が請求項のゲート通過情報取得手段に相当する。なお、ETC車載器2は、高速自動車国道や都市高速道路や自動車専用道路といった高速道路の料金所のETCゲート(つまり、高速道路の出入口)に設けられたETC路側機との間でDSRC(Dedicated Short RangeCommunication)に準じた無線通信を行うことによって、出入口の料金所の情報や通行料金の情報等のゲート通過に関連する情報(以下、ゲート通過情報)を受信するものである。第2外部入力I/F26は、ETC車載器2がこのゲート通過情報を受信したときに、このゲート通過情報を取得するためのものである。
【0056】
ECU27は、CPU、ROM、RAM、バックアップRAM等よりなるマイクロコンピュータを主体として構成される。そして、ECU27は、位置検出器11、地図データ入力器16、外部メモリ18、操作スイッチ群21、リモコンセンサ23、第1外部入力I/F25、第2外部入力I/F26から入力された各種情報に基づき、ナビゲーション機能としての処理や運転診断に関連する処理などを実行する。
【0057】
次に、図2を用いて、ECU27の概略的な構成について説明を行う。図2は、ECU27の概略的な構成を示す機能ブロック図である。なお、ここでは便宜上、ナビゲーション機能としての処理については、マップマッチング処理を除いて説明を省略するものとする。図2に示すようにECU27は、車両位置特定部40、情報収集部50、道路種別判定部60、および運転診断部70を備えている。
【0058】
車両位置特定部40は、位置検出器11で定期的に検出される自車両の現在位置と地図データ入力器16から入力される地図データとをもとに、前述のマップマッチング処理を行い、道路上に最終的な自車両の現在位置を特定する。
【0059】
また、車両位置特定部40は、現在位置自信度(MMCL)を算出する。なお、現在位置自信度(MMCL)は、車両位置特定部40でのマップマッチング処理によって特定された自車両の走行中の道路がどれくらい確からしいかというマップマッチングの確からしさを示す指標である。この現在位置自信度(MMCL)は、車両の各種センサの異常(断線・短絡等による故障)、車両の各種センサの状態(GPS受信状況・センサ学習状況)、マップマッチングにおける形状相関や方位ずれ、マッチング候補数の数などをもとに算出される。
【0060】
例えば、位置検出器11で検出した自車両の現在位置が道路上にのっていない場合(つまり、オフリンクの場合)には、現在位置自信度(MMCL)は最も低く算出される。また、狭角分岐追加直後や上下道が判定できない場合、または並走路が近くにある場合には現在位置自信度(MMCL)が低めに算出される。逆に、上下道が判定できた場合、または位置検出器11で検出した自車両の現在位置が郊外や山岳など確からしい一本道の道路上にのっている場合は現在位置自信度(MMCL)が高めに算出される。
【0061】
情報収集部50は、第1外部入力I/F25を介して、自車両の各種センサ群から操作情報や挙動情報などの車両情報を収集する。なお、情報収集部50が請求項の車両情報収集手段に相当する。
【0062】
道路種別判定部60は、操作スイッチ群21、第2外部入力I/F26、車両位置特定部40から入力された各種情報に基づき、自車両の走行中の道路の道路種別を決定する。詳しくは、道路種別判定部60は、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する。なお、道路種別判定部60での処理の詳細については後述する。
【0063】
運転診断部70は、情報収集部50によって収集された車両情報および道路種別判定部60により決定された道路種別に基づき、道路種別に適した運転診断を実施して運転評価値を算出する。なお、ここで言うところの運転診断とは、所定の閾値を判定閾値として自車両の運転の良否を評価する診断である。また、ここで言うところの運転診断としては、速度診断やエンジン回転数診断など、車両情報が示す検出値等が判定閾値におさまる場合により良好な評価がなされる診断が挙げられる。
【0064】
また、判定閾値は、高速道路を走行中用の値(以下、高速用閾値)と一般道路を走行中用の値(以下、一般用閾値)とが予め用意されており、道路種別判定部60により決定された道路種別に従って、高速用閾値と一般用閾値とのうちのいずれかを運転診断に用いる判定閾値として設定する。具体的には、道路種別判定部60により決定された道路種別が高速道路であった場合には、高速用閾値を運転診断に用いる判定閾値として設定する。また、道路種別判定部60により決定された道路種別が一般道路であった場合には、一般用閾値を運転診断に用いる判定閾値として設定する。
【0065】
さらに、判定閾値は、高速道路についての判定閾値である高速用閾値が一般道路についての判定閾値である一般用閾値よりも大きい値に設定されている。言い換えると、同じ評価が得られる判定閾値として、高速用閾値の方が一般用閾値よりも大きい値に設定されている。
【0066】
例えば、速度診断の場合を一例に挙げると、高速用閾値として「10秒以上連続して車速80km/hを超えて走行した場合」が設定されており、情報収集部50によって収集された車両の速度が10秒以上連続して80km/hを超えていた場合に、超えていなかった場合よりも低い運転評価値を算出するなどとすればよい。また、一般用閾値として「10秒以上連続して車速60km/hを超えて走行した場合」が設定されており、情報収集部50によって収集された車両の速度が10秒以上連続して60km/hを超えていた場合に、超えていなかった場合よりも低い運転評価値を算出するなどとすればよい。
【0067】
また、高速道路および一般道路のそれぞれについて1種類の判定閾値が用意されている構成であってもよいし、図3(a)および図3(b)に示すように、高速道路および一般道路のそれぞれについて段階的に複数の判定閾値が用意されている構成であってもよい。なお、図3(a)および図3(b)は、高速道路および一般道路のそれぞれについての複数種類の閾値を説明するための図である。また、図3(a)は、速度診断に用いる判定閾値の一例であり、図3(b)は、エンジン回転数診断に用いる判定閾値の一例である。
【0068】
図3(a)で示す速度診断の場合を一例に挙げると、高速用閾値として値の低い判定閾値から順に「80km」、「100km」、「120km」の3段階の速度閾値レベル(レベル1〜レベル3)が設定されており、一般用閾値として値の低い判定閾値から順に「40km」、「50km」、「60km」の3段階の速度閾値レベル(レベル1〜レベル3)が設定されている。なお、例えば図3(a)の各速度の値は、10秒以上連続して超えて走行する場合の値を指しているものとすればよい。
【0069】
また、図3(b)で示すエンジン回転数診断の場合を一例に挙げると、高速用閾値として値の低い判定閾値から順に「3000rpm」、「3500rpm」、「4000rpm」の3段階のエンジン回転数閾値レベル(レベル1〜レベル3)が設定されており、一般用閾値として値の低い判定閾値から順に「1500rpm」、「2000rpm」、「2500rpm」の3段階の速度閾値レベル(レベル1〜レベル3)が設定されている。なお、例えば図3(b)の各エンジン回転数の値は、10秒以上連続して超えて走行する場合の値を指しているものとすればよい。
【0070】
高速道路および一般道路のそれぞれについて段階的に複数の判定閾値を用意する場合には、各判定閾値は、運転診断でより良好な評価がなされる範囲の上限値として定める必要がある。つまり、値の低い判定閾値におさまるほど良好な評価がなされるように定める必要がある。
【0071】
また、運転診断部70は、算出した運転評価値をもとに、警報、記録、通報等のアクションを決定する。例えば、運転診断部70によって、記録が必要と判断された場合は、運転評価値や運転診断に用いた車両情報など、必要な情報を外部メモリ18に記録し、自車両の運行管理を行っている事務所(以下、事務所)のPCなどでの解析・管理に利用可能にしてもよい。また、情報収集部50によって収集された運行管理に必要な情報も外部メモリ18に逐次記録するようにしてもよい。
【0072】
さらに、運転診断部70によって、通報が必要と判断された場合など、自車両と事務所との間での通信が必要な場合は、通信部24を介して運転評価値や運転診断に用いた車両情報や運行管理に必要な情報などを事務所側に送信してもよい。また、運転診断部70によって、走行中に警告や運転診断の結果の通知が必要と判断された場合は、表示装置19や音声出力装置20を利用してドライバへ警告を行ったり、運転診断の結果の通知を行ったりしてもよい。なお、どの程度の運転評価値であった場合に、警報、記録、通報等のどのアクションを行うかについては、任意に設定可能であるものとする。
【0073】
次に、図4を用いて道路種別判定部60についての詳細な説明を行う。図4は、道路種別判定部60の概略的な構成を示す機能ブロック図である。図4に示すように、道路種別判定部60は、道路種別変更トリガ生成部61と道路種別決定部62とを備える。また、道路種別変更トリガ生成部61は、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cからなっている。そして、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cから必要に応じて道路種別決定部62へ道路種別変更要求トリガが出力される。なお、道路種別変更要求トリガについては後に詳述する。
【0074】
また、道路種別決定部62では、道路種別変更トリガ生成部61から道路種別変更要求トリガを受けると、設定されている現在の道路種別を変更する。例えば、「高速道路」と設定されている場合は「一般道路」へ設定を変更し、「一般道路」と設定されている場合は「高速道路」へ設定を変更する。なお、道路種別決定部62が請求項の道路種別決定手段に相当する。また、道路種別決定部62で設定中の道路種別の情報は、表示装置19に表示したり、音声出力装置20から音声出力したりすることによって、ユーザに確認可能となっている構成とすればよい。
【0075】
続いて、道路種別変更トリガ生成部61を構成する3つの構成要素、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cでの処理についてフローチャートを用いて詳細に説明する。
【0076】
最初に、ETC情報依存トリガ生成部61aでの処理について図5を用いて説明を行う。図5は、ETC情報依存トリガ生成部61aでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。なお、ETC情報依存トリガ生成部61aが請求項のゲート依存判定手段に相当する。また、本フローは、自車両のイグニッションスイッチがオンされるなどして、運行管理装置1の電源がオンされたときに開始される。
【0077】
まず、ステップS1では、ETCゲートを自車両が通過する時にETC路側機とETC車載器2との間で送受信されるゲート通過情報の通知を、ETC車載器2から受けたか否かを判定する。なお、ETC車載器2は、例えばETC路側機と通信中や通信直後の短時間に限って上記通知を行う構成とすればよい。そして、ゲート通過情報の通知をETC車載器2から受けたと判定した場合(ステップS1でYES)には、ステップS2に移る。また、ゲート通過情報の通知をETC車載器2から受けたと判定しなかった場合(ステップS1でNO)には、ステップS1に戻ってフローを繰り返す。
【0078】
ステップS2では、ETC車載器2から通知されたゲート通過情報の解析を行う。そして、ゲート通過情報がゲート通過可能である場合に通信される情報であった場合(ステップS2でYES)には、ゲート通過したものとしてステップS3に移る。また、ETC車載器2にETCカードが挿入されていない場合や、ETCカードの有効期限が過ぎている場合など、ゲート通過不可能である場合に通信される情報であった場合(ステップS2でNO)には、ゲート通過できなかったものとして、ステップS1に戻ってフローを繰り返す。
【0079】
ステップS3では、道路種別決定部62で現在設定済みの道路種別(RTset)を変更するための道路種別変更要求トリガを生成する必要があるか否かを判定するため、設定済み道路種別(RTset)の情報を道路種別決定部62から取得し、ステップS4に移る。
【0080】
ステップS4では、取得した設定済み道路種別(RTset)が「一般道路(L)」であった場合(ステップS4でYES)には、ステップS5に移る。また、取得した設定済み道路種別(RTset)が「高速道路(H)」であった場合(ステップS4でNO)には、ステップS1に戻ってフローを繰り返す。
【0081】
そして、ステップS5では、道路種別変更要求トリガを道路種別決定部62に出力し、フローを終了する。つまり、ETC情報依存トリガ生成部61aでは、設定済み道路種別(RTset)を「一般道路(L)」から「高速道路(H)」へ変更する場合にのみ、道路種別変更要求トリガが道路種別決定部62に出力される。
【0082】
従って、仮にETC情報依存トリガ生成部61aの道路種別変更要求トリガのみに従って道路種別決定部62で道路種別が設定されるとした場合には、図6に示すように、最初に道路種別が「一般道路(L)」から「高速道路(H)」へ変更された後は、何度ETCゲートを通過しようとも、道路種別が「高速道路(H)」から変更されない。
【0083】
なお、図5のフローが終了した後は、例えば一定期間経過後に再びステップS1に戻ってフローを繰り返す構成とすればよい。
【0084】
続いて、操作入力依存トリガ生成部61bでの処理について図7を用いて説明を行う。図7は、操作入力依存トリガ生成部61bでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。なお、操作入力依存トリガ生成部61bが請求項の操作入力依存判定手段に相当する。また、本フローは、自車両のイグニッションスイッチがオンされるなどして、運行管理装置1の電源がオンされたときに開始される。
【0085】
まず、ステップS21では、操作スイッチ群21のうちの道路種別設定変更スイッチへの入力の有無をもとに、道路種別設定変更スイッチをドライバが押下したかを監視する。そして、道路種別設定変更スイッチへの入力を検出した場合(ステップS21でYES)には、ステップS22に移る。また、道路種別設定変更スイッチへの入力を検出しなかった場合(ステップS21でNO)には、ステップS21に戻ってフローを繰り返す。
【0086】
ステップS22では、道路種別決定部62で現在設定済みの道路種別(RTset)を変更するための道路種別変更要求トリガを生成する必要があるか否かを判定するため、設定済み道路種別(RTset)の情報を道路種別決定部62から取得し、ステップS23に移る。
【0087】
ステップS23では、ステップS22で取得した設定済み道路種別(RTset)と道路種別設定変更スイッチにより入力されてきた道路種別(以下、スイッチ入力道路種別:RTsw)との比較を行う。そして、設定済み道路種別(RTset)とスイッチ入力道路種別(RTsw)とが異なった場合(ステップS23でNO)には、ステップS24に移る。また、設定済み道路種別(RTset)とスイッチ入力道路種別(RTsw)とが同じであった場合(ステップS23でYES)には、道路種別決定部62に設定済みの道路種別を変更する必要がないものとして、ステップS21に戻ってフローを繰り返す。
【0088】
ステップS24では、道路種別変更要求トリガを道路種別決定部62に出力し、ステップS25に移る。ステップS25では、トリガ出力無効フラグをONにする。このフラグは、後述する位置情報依存トリガ生成部61cにおいて参照するフラグである。なお、トリガ出力無効フラグについては、後に詳述する。
【0089】
また、図7のフローが終了した後は、例えば一定期間経過後に再びステップS1に戻ってフローを繰り返す構成とすればよい。
【0090】
さらに、位置情報依存トリガ生成部61cでの処理について図8を用いて説明を行う。図8は、位置情報依存トリガ生成部61cでの道路種別変更トリガの生成に関する動作フローを示すフローチャートである。なお、位置情報依存トリガ生成部61cが請求項の位置依存判定手段に相当する。また、本フローは、自車両のイグニッションスイッチがオンされるなどして、運行管理装置1の電源がオンされたときに開始される。そして、その後は、周期的(例えば200msec〜1000msecごと)に車両位置特定部40によって行われるマップマッチング処理の都度、フローが繰り返される。
【0091】
まず、ステップS41では、車両位置特定部40が算出した現在位置自信度(MMCL)を車両位置特定部40から取得するとともに、設定済み道路種別(RTset)の情報を道路種別決定部62から取得し、ステップS42に移る。
【0092】
ステップS42では、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であるか否かを判定する。よって、位置情報依存トリガ生成部61cが、請求項の自信度判断手段にも相当する。そして、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であると判定した場合(ステップS42でYES)には、ステップS43に移る。また、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であると判定しなかった場合(ステップS42でNO)には、マップマッチング処理における現在位置の特定精度が低下しており、間違った道路種別変更要求トリガを位置情報依存トリガ生成部61cから出力する恐れがあるため、フローを終了する。なお、自信度閾値(MMCLt)は、任意に設定可能な値であって、請求項の所定値に相当する。
【0093】
ステップS43では、マップマッチング処理によって道路リンクにマッチングされた自車両の現在位置に紐づいた道路種別(以下、マッチング道路種別:RTloc)の情報を、地図データ入力器16を介して記憶媒体17から取得し、ステップS44に移る。
【0094】
なお、記憶媒体17から取得する道路種別は、高速自動車国道、都市高速道路、自動車専用道路、一般国道、主要地方道、一般都道府県道、一般市道、町村道等、複数存在するが、ここでは、例えば高速自動車国道、都市高速道路、および自動車専用道路を高速道路とし、高速自動車国道、都市高速道路、および自動車専用道路以外の道路を一般道路とすればよい。また、リンクデータのうちの制限速度のデータをもとに、制限速度が一定以上(例えば80km/h以上など)の道路を高速道路とし、制限速度が一定未満の道路を一般道路とする構成としてもよい。
【0095】
ステップS44では、道路種別決定部62で現在設定済みの道路種別(RTset)を変更するための道路種別変更要求トリガを生成する必要があるか否かを判定するため、ステップS41で取得した設定済み道路種別(RTset)とステップS43で取得したマッチング道路種別(RTloc)との比較を行う。そして、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが異なった場合(ステップS44でNO)には、ステップS45に移る。また、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが同じであった場合(ステップS44でYES)には、道路種別決定部62に設定済みの道路種別を変更する必要がないものとして、ステップS47に移る。
【0096】
つまり、ステップS43からステップS44にかけての処理によって、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定することになる。
【0097】
ステップS45では、トリガ出力無効フラグがONであった場合(ステップS45でYES)には、位置情報依存トリガ生成部61cによる設定済み道路種別(RTset)の変更を行うことができないものとして、フローを終了する。また、トリガ出力無効フラグがONでなかった場合(ステップS45でNO)には、ステップS46に移る。そして、ステップS46では、道路種別変更要求トリガを道路種別決定部62に出力し、フローを終了する。
【0098】
ここで、トリガ出力無効フラグについて詳しく説明を行う。トリガ出力無効フラグは、操作入力依存トリガ生成部61bにおいてセットされるフラグであり、このトリガ出力無効フラグがONされている間は、位置情報依存トリガ生成部61cから道路種別変更要求トリガを出力できないようにする無効化が行われる。これは、ドライバからの操作入力によって変更された道路種別を真値であるとし、マップマッチング処理後の現在位置自信度(MMCL)の状態に関わらず道路種別を変更できないようにするためである。
【0099】
これによれば、位置情報依存トリガ生成部61cによる道路種別の誤判定によって「高速道路」を「一般道路」と判定した場合であって、ドライバが道路種別設定変更スイッチへの入力によって道路種別を正しく修正した後は、位置情報依存トリガ生成部61cからの道路種別変更要求トリガによって周期的に誤った再変更が行われることを防ぐことができる。
【0100】
また、トリガ出力無効フラグのOFFについて説明する。トリガ出力無効フラグのOFFは、ステップS47で行われる。つまり、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが同じであった場合にトリガ出力無効フラグがOFFされる。なお、設定済み道路種別(RTset)とマッチング道路種別(RTloc)とが同じである場合とは、マップマッチングの結果が修正されて正しい道路種別が取得されたことを意味しているため、マップマッチング処理の精度が十分に回復したり上がったりしたところで、トリガ出力無効フラグをOFFすることになる。そして、トリガ出力無効フラグがOFFされた場合には、無効化が解除され、位置情報依存トリガ生成部61cから道路種別変更要求トリガを出力できるようになる。よって、道路種別変更トリガ生成部61が請求項の無効化手段および無効化解除手段に相当する。
【0101】
これによれば、位置情報依存トリガ生成部61cにおいて、より正確である可能性の高いマッチング道路種別(RTloc)が得られるようになってから無効化を解除することにより、道路種別決定部62でより正確な道路種別が設定されることを担保することが可能になる。
【0102】
また、道路種別決定部62では、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれで判定した道路種別の判定結果をもとに、最終的な道路種別を決定する。詳しくは、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれから出力される道路種別変更要求トリガに従って道路種別を変更することによって、最終的な道路種別を決定する。そして、道路種別決定部62では、決定した道路種別を運転診断部70に通知する。
【0103】
なお、前述の無効化が継続されている状態にある場合を除き、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれから出力される道路種別変更要求トリガのうち、時間的に後に出力された道路種別変更要求トリガに従って、道路種別決定部62の設定済み道路種別(RTset)を変更する構成とすればよい。つまり、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれの判定結果のうち、時間的に後に得られた判定結果に従って、道路種別決定部62の設定済み道路種別(RTset)を変更する構成とすればよい。
【0104】
これによれば、道路種別決定部62の設定済み道路種別(RTset)が道路種別変更トリガ生成部61で判定した道路種別と異なる場合は、前述の無効化が継続されている状態にある場合を除き、ETC情報依存トリガ生成部61a、操作入力依存トリガ生成部61b、位置情報依存トリガ生成部61cのそれぞれの道路種別変更要求トリガの出力のタイミングで道路種別の設定を変更することができる。
【0105】
ここで、図9(a)〜図9(d)を用いて、運行管理装置1における道路種別の設定のタイミングの一例を示す。なお、図9(a)〜図9(d)は、運行管理装置1における道路種別の設定のタイミングの一例を示す図である。
【0106】
図9(a)の例は、一般道路からETCゲートAを通過して対距離料金精算タイプの高速道路に進入した後、対距離料金精算タイプの高速道路からETCゲートBを通過して一般道路に出る場合の例である。図9(a)のような場合には、ETCゲートAを通過したところでETC情報依存トリガ生成部61aから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、ETCゲートBを通過した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0107】
また、図9(b)の例は、一般道路からETCゲートCを通過して対距離料金精算タイプの高速道路に進入した後、対距離料金精算タイプの高速道路からETCゲートDを通過して均一料金精算タイプの高速道路に進入し、ETCゲートE・Fを通過した後に一般道路に出る場合の例である。図9(b)のような場合には、ETCゲートCを通過したところでETC情報依存トリガ生成部61aから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、ETCゲートD・E・Fを通過した場合であっても、ETC情報依存トリガ生成部61aから道路種別変更要求トリガは出力されず、ETCゲートFを通過した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0108】
さらに、図9(c)の例は、入口にしかETCゲートがない均一料金精算タイプの高速道路を通過する場合の例であって、一般道路からETCゲートGを通過して均一料金精算タイプの高速道路に進入した後、ETCゲートを通過せずに一般道路に出る場合の例である。図9(c)のような場合には、ETCゲートGを通過したところでETC情報依存トリガ生成部61aから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、均一料金精算タイプの高速道路から一般道路に出た後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0109】
また、図9(d)の例は、出口にしかETCゲートがない均一料金精算タイプの高速道路を通過する場合の例であって、一般道路からETCゲートを通過せずに均一料金精算タイプの高速道路に進入した後、ETCゲートHを通過して一般道路に出る場合の例である。図9(d)のような場合には、一般道路から均一料金精算タイプの高速道路に進入した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「一般道路」から「高速道路」に変更される。そして、ETCゲートHを通過した後に、位置情報依存トリガ生成部61cや操作入力依存トリガ生成部61bから出力される道路種別変更要求トリガに従って道路種別の設定が「高速道路」から「一般道路」に変更される。
【0110】
なお、道路種別決定部62は、位置情報依存トリガ生成部61cからの道路種別変更要求トリガおよびETC情報依存トリガ生成部61aからの道路種別変更要求トリガのうちの少なくともいずれかの出力のタイミングと操作入力依存トリガ生成部61bからの道路種別変更要求トリガの出力のタイミングとが重なった場合には、操作入力依存トリガ生成部61bからの道路種別変更要求トリガを優先して、道路種別を決定し、道路種別の設定の変更を行う構成とすればよい。
【0111】
これによれば、ゲート通過情報や自車両の位置情報をもとに判定した道路種別の判定結果よりも正確な判定結果である可能性が高い道路種別設定変更スイッチの操作による道路種別の判定結果を用いて、道路種別の決定を行うことが可能になるので、より正確に道路種別の決定を行うことが可能になる。
【0112】
また、道路種別決定部62は、位置情報依存トリガ生成部61cからの道路種別変更要求トリガの出力のタイミングとETC情報依存トリガ生成部61aからの道路種別変更要求トリガの出力のタイミングとが重なった場合には、ETC情報依存トリガ生成部61aからの道路種別変更要求トリガを優先して、道路種別を決定し、道路種別の設定の変更を行う構成としてもよい。
【0113】
さらに、以上の構成によれば、位置情報依存トリガ生成部61cからの道路種別変更要求トリガの出力は、マップマッチング処理の自信度である現在位置自信度(MMCL)が高い場合にのみに行うので、道路種別判定部60による間違った道路種別の設定を極力減らすことができる。また、短い周期(前述の例では200ms〜1000ms程度)で定期的に位置情報依存トリガ生成部61cでの処理を実施するため、現在位置自信度(MMCL)が上がれば即座に、位置情報依存トリガ生成部61cから出力される道路種別変更要求トリガに従って道路種別の変更を行うことができる。これにより、ETC路側機が設定されていない料金所ゲートを通過する場合や、ETC車載器2を搭載しない車両に運行管理装置1を搭載した場合であっても道路種別決定部62に設定された道路種別の変更を行うことが可能になっている。
【0114】
また、以上の構成では、道路種別決定部62における道路種別の設定の変更は、基本的には自車両の位置情報をもとに行い、ゲート通過情報は、自車両が高速道路上にいることを判定するためにのみ用いられる。これにより、自車両の高速道路本線への合流前に、確実に道路種別決定部62における道路種別を「高速道路」に変更することができるとともに、高速道路を走行中において走行中の道路を一般道路と判定してしまう誤判定を極力発生させないようにすることができる。
【0115】
さらに、以上の構成では、道路種別判定部60には、手動によって道路種別の設定の変更を行う手動変更モードと自動で道路種別の設定の変更を行う自動変更モードがあり、ゲート通過情報や自車両の位置情報をもとにした自動変更モードによって決定された道路種別が実際の走行中の道路の道路種別と一致しない場合に、道路種別設定変更スイッチからユーザが任意に道路種別の設定を是正することができる。
【0116】
詳しくは、現在走行している道路の実際の道路種別と道路種別決定部62に設定されている道路種別とが異なる場合に、道路種別設定変更スイッチを操作することでドライバが任意に変更できるようになっている。そして、ユーザからの道路種別設定変更スイッチの操作(つまり、手動)による道路種別の設定の変更を「真値」として扱うことで、手動による道路種別の設定の変更が行われた場合には、ゲート通過情報や自車両の位置情報をもとに道路種別判定部60で決定された道路種別と実際の走行中の道路の道路種別とが乖離しているものと考え、一時的にゲート通過情報や自車両の位置情報をもとにした道路種別の設定の変更(つまり、自動変更)を前述の無効化によって停止する。
【0117】
また、前述の無効化の状態となった場合には、自動変更モードから手動変更モードに切り替わる。そして、前述したように、道路種別設定変更スイッチの入力をもとに設定された道路種別と自車両の位置情報をもとに判定した道路種別とが一致するまで、ゲート通過情報や自車両の位置情報をもとにした自動変更モードには復帰しないことなる。このような構成は、地図データが古い場合やマップマッチング処理においてマッチングミスが発生している場合など、自車両の位置情報をもとにした判定の精度が十分でないと推測される状態において有効である。
【0118】
さらに、以上の構成によれば、トリガ無効フラグを導入することにより、前述したように手動変更モードと自動変更モードとをシームレスに切り替えることができるようになるので、ユーザの操作負担を軽減することができる。
【0119】
なお、前述の実施形態では、手動変更モードに切り替わった後に自車両が高速道路を降りて一般道路を走行している場合に、道路種別設定変更スイッチによる道路種別の設定の変更を忘れていると、道路種別決定部62における道路種別の設定は「高速道路」のままとなり、誤った設定が維持され続けてしまう。
【0120】
そこで、手動変更モードに切り替わってトリガ出力無効フラグがONとなり、前述の無効化が継続されている状態においても、現在位置自信度(MMCL)が自信度閾値(MMCLt)以上であって、無効化の継続が所定期間以上に達している場合に、「現在走行中の道路は高速道路でよいか」や「現在走行中の道路は一般道路ではないか」等の現在走行中の道路の道路種別の確認をユーザに促す旨の報知を、道路種別判定部60が表示装置19や音声出力装置20で行わせる構成とすることが好ましい。
【0121】
なお、ここで言うところの自信度閾値(MMCLt)は、ステップS42における自信度閾値(MMCLt)と同じ値であってもよいし、違う値であってもよい。また、ここで言うところの所定期間は、任意に設定可能な値であって、例えば数十分としてもよい。さらに、上記報知は、表示装置19での表示によって行う構成としてもよいし、音声出力装置20での音声出力によって行う構成としてもよい。よって、表示装置19および音声出力装置20が請求項の報知手段に相当する。
【0122】
また、前述の実施形態では、運転診断を運行管理装置側で行う構成を示したが、必ずしもこれに限らない。例えば、運転診断を運行管理装置と通信可能な管理センタで行う構成としてもよい。以下では、この構成について図10を用いて説明を行う。図10は、本発明が適用された運行管理システム100の概略的な構成を示す図である。なお、説明の便宜上、前述の実施形態の説明に用いた図に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0123】
また、図10に示す運行管理システム100は、車両に搭載される運行管理装置1aおよび管理センタ3を備えている。なお、運行管理システム100が請求項の運転状態評価システムに相当し、運行管理装置1aが請求項の車載器に相当する。
【0124】
運行管理装置1aは、運転診断部70に相当する機能を備えない点を除けば、運行管理装置1と同様のものである。なお、運行管理装置1aは、道路種別決定部62に設定されている道路種別の情報や情報収集部50で収集した車両情報を通信部24から通信網を介して管理センタ3に送信する。よって、通信部24が請求項の送信手段に相当し、情報収集部50が請求項の車両情報収集手段に相当する。
【0125】
管理センタ3は、サーバから構成されており、通信網を介して運行管理装置1と通信することが可能な通信部81、通信部81で受信した道路種別情報や車両情報を格納する記憶部82、運転診断を行う運転診断部83、および通信の制御や運転診断の処理等を制御する制御部84を備えている。よって、通信部81が請求項の受信手段に相当する。なお、管理センタ3は、1つのサーバからなるものであってもよいし、複数のサーバからなっているものであってもよい。
【0126】
運転診断部83は、運転診断部70と同様のものであって、通信部81で受信した車両情報および道路種別に基づき、所定の閾値を判定閾値として道路種別に適した運転診断を実施して運転評価値を算出する。また、判定閾値は、運転診断部70と同様に、高速用閾値と一般用閾値とが予め用意されており、通信部81で受信した道路種別に従って、高速用閾値と一般用閾値とのうちのいずれかを運転診断に用いる判定閾値として設定する。よって、運転診断部83が請求項の閾値変更手段および運転診断手段に相当する。
【0127】
以上の構成によれば、運転診断を管理センタ3側で行うので、運行管理装置1a側で運転診断の処理を行う必要がなくなり、運行管理装置1a側の処理の負荷を低減することができる。また、運転診断を管理センタ3側で行うため、ためのソフトウェアを備える必要がなく、運行管理装置1a構成をより簡略化することができる側での運転診断の処理の負荷を
なお、前述の実施形態では、ECU26が第2外部入力I/F26およびETC車載器2を介して、ETCゲートに設けられたETC路側機からゲート通過情報を取得する構成を示したが、必ずしもこれに限らない。例えば、ETCゲート以外の高速道路の料金所ゲートに設置された路側アンテナ等から無線通信で送信されるゲート通過情報を車両側の図示しない無線通信部で受信し、受信したゲート通過情報を第2外部入力I/F26を介してECU26が取得する構成としてもよい。
【0128】
また、前述の実施形態では、操作スイッチ群21のうちの道路種別設定変更スイッチによって、自車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力を受け付ける構成を示したが、必ずしもこれに限らない。例えば、図示しない音声入力装置によって、自車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力を受け付ける構成としてもよい。
【0129】
なお、運行管理装置1は、例えばトラックやタクシー等の事業用自動車の運転診断の結果をもとに事業用自動車のドライバの給料の査定が行われるなどの場合に、事業用自動車に搭載する構成とすることが好適である。これによれば、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことができるため、ドライバのモチベーションを下げずに済む。
【0130】
また、運行管理装置1は、例えば自家用自動車の運転診断の結果をもとにエコノミー・エコロジー的走行の評価が行われる場合に、自家用自動車に搭載する構成とすることが好適である。これによれば、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことができるため、ドライバのモチベーションを下げずに済む。
【0131】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0132】
1 運行管理装置(運転状態評価装置)、1a 運行管理装置(車載器)、2 ETC車載器、3 管理センタ、11 位置検出器(位置検出手段)、12 ジャイロスコープ、13 加速度センサ、14 車輪速センサ、15 GPS受信機、16 地図データ入力器、17 記憶媒体(地図データ記憶手段)、18 外部メモリ、19 表示装置(報知手段)、20 音声出力装置(報知手段)、21 操作スイッチ群、22 リモコン、23 リモコンセンサ、24 通信部(送信手段)、25 第1外部入力I/F、26 第2外部入力I/F、27 ECU、40 車両位置特定部、50 情報収集部(車両情報収集手段)、60 道路種別判定部、61 道路種別変更トリガ生成部(無効化手段)、61a ETC情報依存トリガ生成部(ゲート依存判定手段)、61b 操作入力依存トリガ生成部(操作入力依存判定手段)、61c 位置情報依存トリガ生成部(位置依存判定手段、自信度判断手段)、62 道路種別決定部(道路種別決定手段)、70 運転診断部、81 通信部(受信手段)、82 記憶部、83 運転診断部(閾値変更手段、運転診断手段)、84 制御部、100 運行管理システム(運転状態評価システム)
【特許請求の範囲】
【請求項1】
車両に搭載され、
運転の良否に関する診断である運転診断でより良好な評価がなされる範囲の上限値として定められた閾値を、前記車両の走行中の道路が高速道路と一般道路とのうちのいずれであるのかに応じて変更するとともに、
高速道路についての前記閾値が一般道路についての前記閾値よりも大きい値に設定されており、
前記車両の車両情報と前記閾値とを用いて前記運転診断を行う運転状態評価装置であって、
少なくとも道路および道路種別のデータを含む地図データを記憶している地図データ記憶手段と、
前記車両の現在位置を逐次検出する位置検出手段と、
前記位置検出手段で検出した前記車両の現在位置と前記地図データ記憶手段に記憶されている前記地図データとをもとに、前記車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置依存判定手段と、
高速道路の料金所ゲートを前記車両が通過したことを検出した場合に、前記車両の走行中の道路が高速道路であるとのみ判定するゲート依存判定手段と、
前記位置依存判定手段での判定結果と前記ゲート依存判定手段での判定結果とをもとに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定手段と、を備えていることを特徴とする運転状態評価装置。
【請求項2】
請求項1において、
前記位置依存判定手段で特定した前記車両の走行中の道路の確かさを示す指標である現在位置自信度を定期的に判断する自信度判断手段を備え、
前記道路種別決定手段は、前記自信度判断手段で判断した前記現在位置自信度が所定値未満である場合には、前記位置依存判定手段での判定結果を用いずに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定する一方、前記自信度判断手段で判断した前記現在位置自信度が所定値以上である場合には、前記位置依存判定手段での判定結果を用いて、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項3】
請求項1または2において、
前記車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力を受け付ける操作入力手段と、
前記操作入力手段への入力結果をもとに、前記車両の走行中の道路が高速道路と一般道路とのうちのいずれであるのかを判定する操作入力依存判定手段と、を備え、
前記道路種別決定手段は、前記位置依存判定手段での判定結果と前記ゲート依存判定手段での判定結果とに加え、前記操作入力依存判定手段での判定結果をもとに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項4】
請求項3において、
前記操作入力依存判定手段での判定結果が得られた場合には、当該判定結果と異なる前記位置依存判定手段での判定結果を前記道路種別決定手段で用いることができないようにする無効化を行う無効化手段と、
当該判定結果と同じ判定結果が前記位置依存判定手段で得られた場合に、前記無効化手段による前記無効化を解除する無効化解除手段と、を備えることを特徴とする運転状態評価装置。
【請求項5】
請求項4において、
前記自信度判断手段を備えるものであって、
前記無効化手段による前記無効化が継続されている状態において、前記自信度判断手段で判断した前記現在位置自信度が所定値以上であって、前記無効化の継続が所定期間以上に達している場合に、現在走行中の道路の道路種別の確認をユーザに促す旨の報知を行う報知手段を備えることを特徴とする運転状態評価装置。
【請求項6】
請求項4または5において、
前記道路種別決定手段は、前記無効化手段による前記無効化が継続されている状態にある場合を除き、時間的に後に得られた前記判定結果に従って、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項7】
請求項1〜3のいずれか1項において、
前記道路種別決定手段は、時間的に後に得られた前記判定結果に従って、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項8】
請求項3〜6のいずれか1項において、
前記道路種別決定手段は、前記位置依存判定手段での判定のタイミングおよび前記ゲート依存判定手段での判定のタイミングのうちの少なくともいずれかと前記操作入力依存判定手段での判定のタイミングとが重なった場合には、前記操作入力依存判定手段での判定結果を優先して、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項9】
請求項1〜8のいずれか1項において、
前記道路種別決定手段は、前記位置依存判定手段での判定のタイミングと前記ゲート依存判定手段での判定のタイミングとが重なった場合には、前記ゲート依存判定手段での判定結果を優先して、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項10】
請求項1〜9のいずれか1項において、
前記高速道路の料金所ゲートは、ゲート通過に関連する情報であるゲート通過情報を送信するETC(登録商標)ゲートであり、
前記ETCゲートから送信された前記ゲート通過情報を取得するゲート通過情報取得手段を備え、
前記ゲート依存判定手段は、前記ゲート通過情報取得手段で前記ゲート通過情報を取得した場合に、当該ETCゲートを前記車両が通過したと検出することを特徴とする運転状態評価装置。
【請求項11】
請求項1〜10のいずれか1項において、
前記閾値は、高速道路および一般道路のそれぞれについて段階的に複数の値が設定されており、
前記運転診断において、この複数の値を用いることによって段階的な評価が行われることを特徴とする運転状態評価装置。
【請求項12】
車両に搭載される車載器と、
前記車載器と通信を行う管理センタと、を含み、
前記車載器は、
少なくとも道路および道路種別のデータを含む地図データを記憶している地図データ記憶手段と、
前記車両の現在位置を検出する位置検出手段と、
前記位置検出手段で検出した前記車両の現在位置と前記地図データ記憶手段に記憶されている前記地図データとをもとに、前記車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを判定する位置依存判定手段と、
高速道路の料金所ゲートを前記車両が通過したことを検出した場合に、前記車両の走行中の道路が高速道路であるとのみ判定するゲート依存判定手段と、
前記位置依存判定手段での判定結果と前記ゲート依存判定手段での判定結果とをもとに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定手段と、
前記車両の車両情報を収集する車両情報収集手段と、
前記道路種別決定手段で決定した前記車両の走行中の道路が高速道路であるか一般道路であるかの道路種別情報と前記車両情報収集手段で収集した前記車両情報とを前記管理センタに送信する送信手段と、を備えており、
前記管理センタは、
前記送信手段から送信される前記道路種別情報と前記車両情報とを受信する受信手段と、
前記受信手段で受信した前記道路種別情報に応じて、運転の良否に関する診断である運転診断でより良好な評価がなされる範囲の上限値として定められているとともに高速道路についての値が一般道路についての値よりも大きい値に設定されている閾値を変更する閾値変更手段と、
前記受信手段で受信した前記車両情報と前記閾値とを用いて前記運転診断を行う運転診断手段と、を備えることを特徴とする運転状態評価システム。
【請求項1】
車両に搭載され、
運転の良否に関する診断である運転診断でより良好な評価がなされる範囲の上限値として定められた閾値を、前記車両の走行中の道路が高速道路と一般道路とのうちのいずれであるのかに応じて変更するとともに、
高速道路についての前記閾値が一般道路についての前記閾値よりも大きい値に設定されており、
前記車両の車両情報と前記閾値とを用いて前記運転診断を行う運転状態評価装置であって、
少なくとも道路および道路種別のデータを含む地図データを記憶している地図データ記憶手段と、
前記車両の現在位置を逐次検出する位置検出手段と、
前記位置検出手段で検出した前記車両の現在位置と前記地図データ記憶手段に記憶されている前記地図データとをもとに、前記車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置依存判定手段と、
高速道路の料金所ゲートを前記車両が通過したことを検出した場合に、前記車両の走行中の道路が高速道路であるとのみ判定するゲート依存判定手段と、
前記位置依存判定手段での判定結果と前記ゲート依存判定手段での判定結果とをもとに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定手段と、を備えていることを特徴とする運転状態評価装置。
【請求項2】
請求項1において、
前記位置依存判定手段で特定した前記車両の走行中の道路の確かさを示す指標である現在位置自信度を定期的に判断する自信度判断手段を備え、
前記道路種別決定手段は、前記自信度判断手段で判断した前記現在位置自信度が所定値未満である場合には、前記位置依存判定手段での判定結果を用いずに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定する一方、前記自信度判断手段で判断した前記現在位置自信度が所定値以上である場合には、前記位置依存判定手段での判定結果を用いて、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項3】
請求項1または2において、
前記車両の走行中の道路が高速道路と一般道路とのうちのいずれであるかを指定するユーザからの入力を受け付ける操作入力手段と、
前記操作入力手段への入力結果をもとに、前記車両の走行中の道路が高速道路と一般道路とのうちのいずれであるのかを判定する操作入力依存判定手段と、を備え、
前記道路種別決定手段は、前記位置依存判定手段での判定結果と前記ゲート依存判定手段での判定結果とに加え、前記操作入力依存判定手段での判定結果をもとに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項4】
請求項3において、
前記操作入力依存判定手段での判定結果が得られた場合には、当該判定結果と異なる前記位置依存判定手段での判定結果を前記道路種別決定手段で用いることができないようにする無効化を行う無効化手段と、
当該判定結果と同じ判定結果が前記位置依存判定手段で得られた場合に、前記無効化手段による前記無効化を解除する無効化解除手段と、を備えることを特徴とする運転状態評価装置。
【請求項5】
請求項4において、
前記自信度判断手段を備えるものであって、
前記無効化手段による前記無効化が継続されている状態において、前記自信度判断手段で判断した前記現在位置自信度が所定値以上であって、前記無効化の継続が所定期間以上に達している場合に、現在走行中の道路の道路種別の確認をユーザに促す旨の報知を行う報知手段を備えることを特徴とする運転状態評価装置。
【請求項6】
請求項4または5において、
前記道路種別決定手段は、前記無効化手段による前記無効化が継続されている状態にある場合を除き、時間的に後に得られた前記判定結果に従って、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項7】
請求項1〜3のいずれか1項において、
前記道路種別決定手段は、時間的に後に得られた前記判定結果に従って、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項8】
請求項3〜6のいずれか1項において、
前記道路種別決定手段は、前記位置依存判定手段での判定のタイミングおよび前記ゲート依存判定手段での判定のタイミングのうちの少なくともいずれかと前記操作入力依存判定手段での判定のタイミングとが重なった場合には、前記操作入力依存判定手段での判定結果を優先して、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項9】
請求項1〜8のいずれか1項において、
前記道路種別決定手段は、前記位置依存判定手段での判定のタイミングと前記ゲート依存判定手段での判定のタイミングとが重なった場合には、前記ゲート依存判定手段での判定結果を優先して、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定することを特徴とする運転状態評価装置。
【請求項10】
請求項1〜9のいずれか1項において、
前記高速道路の料金所ゲートは、ゲート通過に関連する情報であるゲート通過情報を送信するETC(登録商標)ゲートであり、
前記ETCゲートから送信された前記ゲート通過情報を取得するゲート通過情報取得手段を備え、
前記ゲート依存判定手段は、前記ゲート通過情報取得手段で前記ゲート通過情報を取得した場合に、当該ETCゲートを前記車両が通過したと検出することを特徴とする運転状態評価装置。
【請求項11】
請求項1〜10のいずれか1項において、
前記閾値は、高速道路および一般道路のそれぞれについて段階的に複数の値が設定されており、
前記運転診断において、この複数の値を用いることによって段階的な評価が行われることを特徴とする運転状態評価装置。
【請求項12】
車両に搭載される車載器と、
前記車載器と通信を行う管理センタと、を含み、
前記車載器は、
少なくとも道路および道路種別のデータを含む地図データを記憶している地図データ記憶手段と、
前記車両の現在位置を検出する位置検出手段と、
前記位置検出手段で検出した前記車両の現在位置と前記地図データ記憶手段に記憶されている前記地図データとをもとに、前記車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを判定する位置依存判定手段と、
高速道路の料金所ゲートを前記車両が通過したことを検出した場合に、前記車両の走行中の道路が高速道路であるとのみ判定するゲート依存判定手段と、
前記位置依存判定手段での判定結果と前記ゲート依存判定手段での判定結果とをもとに、前記車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定手段と、
前記車両の車両情報を収集する車両情報収集手段と、
前記道路種別決定手段で決定した前記車両の走行中の道路が高速道路であるか一般道路であるかの道路種別情報と前記車両情報収集手段で収集した前記車両情報とを前記管理センタに送信する送信手段と、を備えており、
前記管理センタは、
前記送信手段から送信される前記道路種別情報と前記車両情報とを受信する受信手段と、
前記受信手段で受信した前記道路種別情報に応じて、運転の良否に関する診断である運転診断でより良好な評価がなされる範囲の上限値として定められているとともに高速道路についての値が一般道路についての値よりも大きい値に設定されている閾値を変更する閾値変更手段と、
前記受信手段で受信した前記車両情報と前記閾値とを用いて前記運転診断を行う運転診断手段と、を備えることを特徴とする運転状態評価システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−186951(P2011−186951A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−53777(P2010−53777)
【出願日】平成22年3月10日(2010.3.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月10日(2010.3.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]